Embed Size (px)
Citation preview

1171
Second-Order Differential Equations
16
Chapter Preview In Chapter 8, we introduced first-order differential equations and illustrated their use in describing how physical and biological systems change in time or space. As you will see in this chapter, second-order differential equa-tions are equally applicable and are widely used for similar purposes in many disciplines. After presenting some fundamental concepts that underlie second-order linear equations, we turn to linear constant-coefficient equations, which happen to be among the most ap-plicable of all differential equations. After learning how to solve these equations and their associated initial value problems, we discuss a few of the many mathematical models based on second-order equations. The chapter closes with a look at transfer functions, which are used to analyze and design mechanical and electrical oscillators.
16.1 Basic Ideas
16.2 Linear Homogeneous Equations
16.3 Linear Nonhomogeneous Equations
16.4 Applications
16.5 Complex Forcing Functions
16.1 Basic IdeasMuch of what you learned about first-order differential equations in Chapter 8 will be use-ful in the study of second-order equations. Once again, you will see the idea of a general solution, which is an entire family of functions that satisfy the equation. However, many of the methods used to find general solutions of first-order equations do not work for second-order equations. As a result, much of the chapter is devoted to developing new solution methods. At the same time, we highlight many applications of second-order equations.
A Quick OverviewPerhaps the most common source of second-order differential equations is Newton’s sec-ond law of motion, which governs the motion of everyday objects (for example, planets, billiard balls, and raindrops). Therefore, much of this chapter is devoted to developing mathematical formulations of systems that are in motion or that have time-dependent be-havior. As you will see, a system may be a moving object such as a falling stone, a swing-ing pendulum, or a mass on a spring. Less obvious, a system may also be an electrical circuit that produces a radio signal, a boat in pursuit of a fleeing target, or the organs of a person assimilating a drug.
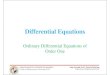
Here is an example of a system. Imagine a block of mass m hanging at rest from a solid support by a spring. If the block is displaced from its rest position and released, then it oscillates up and down along a line (Figure 16.1). We let y1t2 be the position of the block relative to its rest position t time units after it is released. When the spring is stretched below the rest position, the position of the block y1t2 is positive.
Equilibriumposition
y , 0
y . 0
y 5 0
Figure 16.1
M16_BRIG9324_01_SE_M16_01 pp2.indd 1171 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1172 Chapter 16 • Second-Order Differential Equations
Newton’s second law for one-dimensional motion governs the motion of the block; it says that
➤ The term my�1t2 is called the inertial term because if there are no external forces 1F = 02, then the equation becomes my�1t2 = 0, which implies that y� (the velocity) is constant. In this case, the object maintains its initial velocity at all times due to its inertia.
mass # acceleration = sum of forces.
m a = y� F¯˘˙ ¯˚˚˘˚˚˙¯˚˘˚˙
We know that the acceleration is a1t2 = y�1t2. Therefore, Newton’s second law takes the form
my�1t2 = F,
Inertial Sum of term forces
where the forces included in F (such as the restoring force of the spring, air resistance, and external forces) may depend on the time t, the position y, and the velocity y�.
We will investigate the spring-block system in detail in Section 16.4. As you will see, a complete mathematical formulation of this system includes a differential equation, with all the relevant external forces, plus a set of initial conditions. The initial conditions specify the initial position and velocity of the block. A typical set of initial conditions has the form y102 = A, y�102 = B, where A and B are given constants.
This combination of a differential equation plus initial conditions is called an initial value problem. The goal of this chapter is to learn how to solve second-order initial value problems.
TerminologyRecall that the order of a differential equation is the highest order that appears on a de-rivative in the equation. This chapter deals with linear second-order equations of the form
y�1t2 + p1t2y�1t2 + q1t2y1t2 = f 1t2. (1)
In this equation, p, q, and f are specified functions of t that are continuous on some interval of interest that we call I. The equation is linear because the unknown function y and its derivatives appear only to the first power, and not in products with each other, or as arguments of other functions. Equations that cannot be put in this form are nonlinear. Solving equation (1) means finding a function y that satisfies the equation on the interval I.
Another useful distinction concerns the function f on the right side of equation (1). An equation in which f 1t2 = 0 on the interval of interest is said to be homogeneous. An equation in which f is not identically zero is nonhomogeneous.
example 1 Classifying differential equations Classify the following differential equations that arise from Newton’s second law.
a. my� = -0.001y� - 2.1y (This equation describes a block of mass m oscillating on a spring in the presence of friction.)
b. my� = mg - 0.051y�22 (This equation describes an object of mass m falling in a gravitational field subject to air resistance, where g is the acceleration due to gravity.)
Solution
a. Writing the equation in the form y� + 10.001>m2y� + 12.1>m2y = 0, we see that it has the form given in (1). The term with the highest order derivative is y�; therefore, the equation is second order. It is linear because y and its derivatives appear only to the first power, and they do not appear in products or composed with other func-tions. It is a homogeneous equation because there is no term independent of y and its derivatives.
➤ When there is no risk of confusion, it is common practice to suppress the independent variable and write y�, y�, and y instead of y�1t2, y�1t2, and y1t2, respectively.
¯˚˘˚˙ ¯˚˘˚˙
M16_BRIG9324_01_SE_M16_01 pp2.indd 1172 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.1 Basic Ideas 1173
b. As in part (a), the equation is second order. It is nonlinear because y� appears to the second power, and it is nonhomogeneous because the term mg is independent of y and its derivatives. Related Exercises 9–12
➤
Quick check 1 Classify these equations with respect to order, linearity, and homogeneity. A: y� + 3y = 4t2, B: y� - 4y� + 2y = 0.
➤
¯˚˘˚˙
¯˚˘˚˙
¯˚˘˚˙
¯˚˘˚˙
¯˚˘˚˙
¯˚˘˚˙
¯˚˘˚˙ ¯˚˘˚˙ ¯˚˘˚˙
Homogeneous Equations and General SolutionsWe now turn to second-order linear homogeneous equations of the form
y� + py� + qy = 0,
and see what it means for a function to be a solution of such an equation.
example 2 Verifying solutions Consider the linear differential equation
t2y� - ty� - 3y = 0, for t 7 0.
a. Verify by substitution that the functions y = t3 and y =1
t are solutions of the equation.
b. Verify by substitution that the function y = 100t3 is a solution of the equation.
c. Verify by substitution that the function y = 6t3 +8
t is a solution of the equation.
Solution
a. Substituting y = t3 into the equation, we carry out the following calculations.
t21t32� - t1t32� - 31t32 y� = 6t y� = 3t2 y = t3
= t216t2 - t13t22 - 3t3
= t316 - 3 - 32 = 0
We see that y = t3 satisfies the equation, for all t 7 0. Substituting y = t-1 into the equation, we find that
t21t-12� - t1t-12� - 31t-12 y� = 2t-3 y� = - t-2 y = t-1
= t212t-32 + t1t-22 - 3t-1
= t-112 + 1 - 32 = 0.
The function y1t2 = t-1 also satisfies the equation, for all t 7 0.
b. Recall that 1cy1t22� = cy�1t2 for real numbers c. So you might anticipate that multiplying the solution y1t2 = t3 by the constant 100 will produce another solution. A quick check shows that
t21100t32� - t1100t32� - 31100t32 = 100t316 - 3 - 32 = 0.
y� = 600t y� = 300t2 y = 100t3
The function y = 100t3 is a solution. We could replace 100 by any constant c and the function y = ct3 would also be a solution. Similarly, y = ct-1 is a solution, for any constant c.
➤ Some books refer to solutions of the homogeneous equation as complementary solutions or complementary functions.
➤ The equation in Example 2 is linear. It can be put in the form y� + py� + qy = 0 by dividing the equation by t2, where t 7 0.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1173 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1174 Chapter 16 • Second-Order Differential Equations
c. By parts (a) and (b), we know that y = t3 and y = t-1 are both solutions of the equa-tion. Now we investigate whether a constant multiplied by one solution plus a constant multiplied by the other solution is also a solution. Substituting, we have
t216t3 + 8t-12� - t16t3 + 8t-12� - 316t3 + 8t-12 y� = 36t + 16t-3 y� = 18t2 - 8t-2 y = 6t3 + 8t-1
= t3136 - 18 - 182 + t-1116 + 8 - 242 = 0.
In this case, the sum of constant multiples of two solutions is also a solution, for any constants. Related Exercises 13–22
➤
Example 2 raises some fundamental questions about linear differential equations and it gives some hints about answers. How many solutions does a second-order linear equation have? When can you multiply a solution by a constant (as in Example 2b) and produce another solution? When can you add two solutions (as in Example 2c) and get another solution? Focusing on homogeneous equations, the following theorem begins to answer these questions.
➤ Notice that zero function y = 0 is always a solution of a homogeneous equation. So when we refer to solutions of homogeneous equations, we always mean nonzero (often called nontrivial)solutions.
¯˚˚˘˚˚˙ ¯˚˚˘˚˚˙ ¯˚˚˘˚˚˙
theorem 16.1 Superposition Principle Suppose that y1 and y2 are solutions of the homogeneous second-order linear equation y� + py� + qy = 0. Then the function y = c1y1 + c2y2 is also a solu-tion of the homogeneous equation, where c1 and c2 are arbitrary constants.
Proof: We verify by substitution that the function y = c1y1 + c2y2 satisfies the equation.
1c1y1 + c2y22� + p1c1y1 + c2y22� + q1c1y1 + c2y22 = c1y1� + c1py1� + qc1y1 + c2y2� + pc2y2� + qc2y2 Expand derivatives; regroup terms.
= c11
y1� + py1� + qy12 + c21
y2� + py2� + qy22 Factor c1 and c2.
equals 0; equals 0; y1 is a solution y2 is a solution
= c1# 0 + c2
# 0 y1 and y2 are solutions.
= 0
We have confirmed that y = c1y1 + c2y2 is a solution of the homogeneous equation when y1 and y2 are solutions.
➤
A function of the form c1y1 + c2y2 is called a linear combination or superposition of y1 and y2. Theorem 16.1 says that linear combinations of solutions of a linear homoge-neous equation are also solutions. This important property applies only to linear differen-tial equations.
We now turn to the question of whether a linear combination such as c1y1 + c2y2 accounts for all the solutions of a homogeneous equation. The following definition is critical.
¯˚˚˚˘˚˚˚˙ ¯˚˚˚˘˚˚˚˙
DeFinition Linear Dependence/Independence of Two Functions
Two functions 5 f11t2, f21t26 are linearly dependent on an interval I if one func-tion is a nonzero constant multiple of the other function, for all t in I; that is, for some nonzero constant c, f11t2 = cf21t2, for all t in I. Otherwise, 5 f11t2, f21t26 are linearly independent on I.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1174 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.1 Basic Ideas 1175
For example, the functions 5 t, t36 are linearly independent on any interval because there is no constant c such that t = ct3, for all t in that interval (Figure 16.2a). Similarly, the functions 5sin t, cos t6 are linearly independent on any interval, whereas the func-tions 5et, 2et6 are constant multiples of each other and are linearly dependent on any interval (Figure 16.2b).
�1 t1 2�2
4
8
�4
�8
y
y � t3
y � t
y � t and y � t3 arelinearly independenton any interval
(a)
�1 t1 2�2
4
8
�4
�8
y
y � 2et
y � et
y � et and y � 2et arelinearly dependenton any interval
(b) Figure 16.2
Quick check 2 Are the following pairs of functions linearly independent or linearly dependent on any interval [a, b]? 51, sin t6 , 5 t5, - t56 , 5e2t, -e-2t6 , 5sin2 t, cos2 t6 ➤
An Aside The concept of linear independence is important in many areas of mathe-matics and it applies to objects other than functions. More formally, a set of n functions 5 f11t2, f21t2, c, fn1t26 is linearly dependent on an interval I if there are constants c1, c2, c, cn, not all zero, such that
c1 f11t2 + c2 f21t2 + g+ cn fn1t2 = 0, for all t in I.
Equivalently, if one function in the set can be written as a linear combination of the other functions, then the functions are linearly dependent. If this identity holds only by taking c1 = c2 = g = cn = 0, then the functions are linearly independent. For example, the functions51, t, t26 are linearly independent, whereas the functions 5 t, t2, 3t2 - 2t6 are linearly dependent on 1- � , �2. When n = 2, this more general definition reduces to the definition given above.
As stated in the following theorem, linear independence is the key to determining whether we have found all the solutions of a linear homogeneous differential equation.
➤ The proof of Theorem 16.2 is usually given in more advanced courses on differential equations. That proof relies on the existence and uniqueness theorem for initial value problems given at the end of this section.
theorem 16.2If p and q are continuous on an interval I, and y1 and y2 are linearly independent solutions of the linear homogeneous equation y� + py� + qy = 0, then all so-lutions of the homogeneous equation can be expressed as a linear combination y = c1y1 + c2y2, where c1 and c2 are arbitrary constants.
Using the same argument, the following pairs of functions are linearly independent:
5sin at, cos bt6 on 1- � , �2, for real numbers a � 0 and b,
5eat, ebt6 on 1- � , �2, for real numbers a � b,
5 tp, tq6 on 10, �2, for real numbers p � q.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1175 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1176 Chapter 16 • Second-Order Differential Equations
If y1 and y2 are linearly independent solutions, the function y = c1y1 + c2y2, where c1 and c2 are arbitrary real constants, is called the general solution of the homogeneous equation; it represents all possible homogeneous solutions.
Notice the progression here. The general solution of a first-order differential equation involves one arbitrary constant; the general solution of a second-order equation involves two arbitrary constants; and the general solution of an nth-order equation involves n arbi-trary constants.
example 3 General solutions
a. The functions 5et, et+ 26 are solutions of the equation y� - y = 0, for - � 6 t 6 � . If possible, find a general solution of the equation.
b. The functions 5e4t, e-4t6 are solutions of the equation y� - 16y = 0, for - � 6 t 6 � . Show that y = cosh 4t is also a solution.
Solution
a. Noting that et+ 2 = e2et, we see that et+ 2 is a constant multiple of et for all t in 1- � , �2. Therefore, the functions 5et, et+ 26 are linearly dependent, and we cannot determine the general solution from this information alone. Another linearly indepen-dent solution is needed in order to write the general solution. (You can verify that e-t is a second linearly independent solution.)
b. The functions 5e4t, e-4t6 are linearly independent on 1- � , �2 because there is no constant c such that e4t = c e-4t, for all t in 1- � , �2. Therefore, by Theorem 16.2 we can write all solutions of the homogeneous equation in the form c1e
4t + c2e-4t. For
example, taking c1 = c2 =1
2, we see that cosh 4t =
1
2e4t +
1
2e-4t is also a solution.
Related Exercises 23–26➤
example 4 An oscillator equation The equation y� + 9y = 0 describes the motion of an oscillator such as a block on a spring in the absence of external forces such as friction. The functions 5sin 3t, cos 3t6 are solutions of the equation, for - � 6 t 6 � . Find the general solution of the equation.
Solution The functions 5sin 3t, cos 3t6 are linearly independent on 1- � , �2 because it is not possible to find a constant c such that sin 3t = c cos 3t, for all t in 1- � , �2. Therefore, the general solution can be written in the form y = c1 sin 3t + c2 cos 3t, where c1 and c2 are real numbers. Related Exercises 23–26
➤
Nonhomogeneous Equations and General SolutionsWe now shift our attention to linear nonhomogeneous equations of the form
y�1t2 + p1t2y�1t2 + q1t2y1t2 = f 1t2,
where the function f is not identically zero on the interval of interest. As before, we assume that p, q, and f are continuous on some interval I of interest. Suppose for the moment that we have found a function that satisfies this equation. Such a solution is called a particular solution, and methods for finding particular solutions are discussed in Section 16.3.
example 5 Another oscillator equation Building on Example 4, the equation y� + 9y = 14 sin 4t describes a spring-block system that is driven by an oscillatory external force f 1t2 = 14 sin 4t in the absence of friction. Show that yp = -2 sin 4t is a particular solution of the equation.
➤ Thinking conceptually, to solve a first-order equation, you must “undo” one derivative, which requires one integration and produces one arbitrary constant in the general solution. To solve an nth-order equation, you must “undo” n derivatives, which requires n integrations and produces n arbitrary constants in the general solution.
➤ The equation in Example 4 and more general oscillator equations are derived in Section 16.4.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1176 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.1 Basic Ideas 1177
Solution Substituting yp = -2 sin 4t into the nonhomogeneous equation, we have
yp� + 9yp = 1-2 sin 4t2� + 91-2 sin 4t2 Substitute yp.
= -21-16 sin 4t2 - 18 sin 4t 1sin 4t2� = -16 sin 4t
= 14 sin 4t. Simplify.
Therefore, yp satisfies the nonhomogeneous equation and is a particular solution.Related Exercises 27–30
➤
Quick check 3 Is yp = -1 a particular solution of the equation y� - y = 1?
➤
theorem 16.3If yp and zp are particular solutions of the nonhomogeneous equation y� + py� + qy = f, then yp and zp differ by a solution of the homogeneous equation.
Proof: Let w = yp - zp be the difference of two particular solutions and note that yp and zp both satisfy the nonhomogeneous equation. Substituting w into the differential equa-tion, we find that
Quick check 4 Verify that yp = -1 and zp = et - 1 are particular solu-tions of y� - y = 1 and their differ-ence yp - zp = et is a solution of the homogeneous equation y� - y = 0.
➤
w� + pw� + qw = 1yp - zp2� + p1yp - zp2� + q1yp - zp2 Substitute w = yp - zp.
= ayp� + pyp� + qypb - azp� + pzp� + qzpb Regroup; identify particular solutions.
= f - f = 0.
➤
¯˚˚˚˘˚˚˚˙ ¯˚˚˚˘˚˚˚˙
f f
The practical meaning of the theorem is that if you find one particular solution, then you can stop looking. Any two particular solutions must differ by a solution of the ho-mogeneous equation, and solutions of the homogeneous equation already appear in the general solution.
We can now describe how to find the general solution of a nonhomogeneous equa-tion: We find the general solution of the homogeneous equation c1y1 + c2y2 and add to it any particular solution.
theorem 16.4Suppose y1 and y2 are linearly independent solutions of the homogeneous equa-tion y� + py� + qy = 0, and yp is any particular solution of the corresponding nonhomogeneous equation y� + py� + qy = f. Then the general solution of the nonhomogeneous equation is
y = c1y1 + c2y2 + yp,
solution of the particular homogeneous solution equation
where c1 and c2 are arbitrary constants.
¯˚˘˚˙ ¯˘˙
Our goal is to find the general solution of a given nonhomogeneous equation; that is, a family of functions, all of which satisfy the equation. Before doing so, we can answer an important practical question right now. How many particular solutions does one equation have? When do we stop looking? Theorem 16.3 provides the answers.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1177 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1178 Chapter 16 • Second-Order Differential Equations
Proof: Notice that because of Theorem 16.3, we can choose any particular solution to form the general solution. We verify by substitution that y = c1y1 + c2y2 + yp satisfies the nonhomogeneous equation. Recall that y1 and y2 satisfy y� + py� + qy = 0 and yp satisfies y� + py� + qy = f.
y� + py� + qy
= 1c1y1 + c2y2 + yp2� + p1c1y1 + c2y2 + yp2� + q1c1y1 + c2y2 + yp2 Substitute solution.
Rearrange terms.
= c1ay1� + py1� + qy1b + c2ay2� + py2� + qy2b + ayp� + pyp� + qypb ¯˚˚˚˘˚˚˚˙¯˚˚˚˘˚˚˚˙ ¯˚˚˚˘˚˚˚˙
00 f
= 0 + 0 + f = f Identify solutions.
We see that the proposed general solution satisfies the nonhomogeneous equation, as claimed. Notice that general solution of the nonhomogeneous equation also has two arbi-trary constants.
➤
example 6 General solution of an oscillator equation Find the general solution of the oscillator equation y� + 9y = 14 sin 4t (Example 5).
Solution By Example 4, two linearly independent solutions of the homogeneous equa-tion are y1 = sin 3t and y2 = cos 3t. Using Example 5, we know that a particular solu-tion is yp = -2 sin 4t. By Theorem 16.4, the general solution of the oscillator equation is
y = c1 sin 3t + c2 cos 3t - 2 sin 4t,
solution of particular homogeneous equation solution
where c1 and c2 are arbitrary constants. Related Exercises 31–38➤
Initial Value ProblemsAs mentioned at the beginning of this chapter, mathematical models that involve differen-tial equations often take the form of an initial value problem; that is, a differential equa-tion accompanied by initial conditions. It turns out that with second-order equations, two initial conditions are needed to specify a solution to the initial value problem. Unless there is a good reason to do otherwise, we specify the initial conditions at t = 0. For equations that describe the motion of an object, the initial conditions give the initial position and velocity of the object. As shown in the next example, the two initial conditions are used to determine the two arbitrary constants in the general solution.
example 7 Solution of an initial value problem Consider the spring-block system described in Example 6. If the block has an initial position y102 = 4 and an initial veloc-ity y�102 = 1, the motion of the block is described by the initial value problem
¯˚˚˚˘˚˚˚˙ ¯˘˙
y� + 9y = 14 sin 4t Differential equation
y102 = 4, y�102 = 1. Initial conditions
Find the solution of the initial value problem.
Solution The general solution of the differential equation was found in Example 6:
y = c1 sin 3t + c2 cos 3t - 2 sin 4t.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1178 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.1 BasicIdeas 1179
Todeterminethetwoarbitraryconstantsc1andc2,weusetheinitialconditions.Thefirstconditiony102 = 4impliesthat
y102 = c1sin13 # 02 + c2cos13 # 02 - 2sin14 # 02 = c2 = 4,
0 1 0
andtheconstantc2 = 4isdetermined.Notingthat
y� = 3c1cos3t - 3c2sin3t - 8cos4t,
thesecondconditiony�102 = 1impliesthat
y�102 = 3c1cos13 # 02 - 3c2sin13 # 02 - 8cos14 # 02 = 3c1 - 8 = 1;
1 0 1
itfollowsthatc1 = 3.Havingdeterminedthetwoarbitraryconstantsinthegeneralsolu-tion,thesolutionoftheinitialvalueproblemis
y = 3sin3t + 4cos3t - 2sin4t.
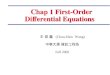
Inpractice,itisadvisabletocheckthatthisfunctiondoeseverythingitissupposedtodo:Itmustsatisfythedifferentialequationandbothinitialconditions.
Figure16.3showsthatthesolutiontotheinitialvalueproblem(inred)isoneofinfinitelymanyfunctionsinthegeneralsolution.Itistheonlyonethatsatisfiestheinitialconditions.
¯˚˘˚˙
¯˚˘˚˙ ¯˚˘˚˙ ¯˚˘˚˙
¯˚˘˚˙ ¯˚˘˚˙
Quick check 5 Thegeneralsolutionofanequationisy = c1sint + c2cost.Findtheconstantsc1andc2suchthaty102 = 1,y�102 = 0.
➤
Related Exercises 39–46
➤
y(0) � 4, y�(0) � 1
y � 3sin 3t � 4cos 3t � 2sin 4t
�1 t1 2�2
4
8
�4
�8
y
Figure 16.3
Theoretical MattersWeclosewithtwoimportantquestions.Wecanprovideanswers,butrigorousproofsgobeyondthescopeofthisdiscussionandaregenerallygiveninadvancedcourses.
Thefirstquestionconcernssolutionsofinitialvalueproblems.GivenaninitialvalueproblemsuchasthatinExample7,whencanweexpecttofindauniquesolution?Anan-swerisgiveninthefollowingtheorem.
➤ Wehaveseenthattosolveaninitialvalueproblem(thesubjectofTheorem16.5),wemustfirstfindageneralsolution(thesubjectofTheorem16.6).ThetheoremsaregiveninthereverseorderbecausetheproofofTheorem16.6reliesontheproofofTheorem16.5.
Theorem 16.5 Solutions of Initial Value ProblemsSupposethefunctionsp, q,andfarecontinuousonanopenintervalIcontainingthepoint0.Thentheinitialvalueproblem
y�1t2 + p1t2y�1t2 + q1t2y1t2 = f1t2y102 = A,y�102 = B,
whereAandBaregiven,hasauniquesolutiononI.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1179 23/07/12 10:50 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1180 Chapter 16 • Second-Order Differential Equations
Section 16.1 exerciSeSReview Questions
The conditions of this theorem, namely continuity of the coefficients p, q, and f on the interval of interest, guarantee the existence and uniqueness of solutions of initial value problems on same interval. These conditions are satisfied by the equations we consider in this chapter.
The second question concerns general solutions. All the examples of this section have demonstrated that second-order linear homogeneous equations have two linearly indepen-dent solutions, which comprise the general solution. Is this observation always true? The following theorem gives an affirmative answer under appropriate conditions.
theorem 16.6 Linearly Independent Solutions Suppose the functions p and q are continuous on an open interval I. Then the homogeneous equation
y�1t2 + p1t2y�1t2 + q1t2y1t2 = 0
has two linearly independent solutions y1 and y2, and the general solution on I is y = c1y1 + c2y2, where c1 and c2 are arbitrary constants.
These theorems claim the existence of solutions, but they don’t say a word about how to find solutions. We now turn to the practical matter of actually solving differential equations.
1. Describe how to find the order of a differential equation.
2. How do you determine whether a differential equation is linear or nonlinear?
3. What distinguishes a homogeneous from a nonhomogeneous differential equation?
4. Give a general form of a second-order linear nonhomogeneous differential equation.
5. How do you determine whether two functions are linearly dependent on an interval?
6. How many linearly independent functions appear in the general solution of a second-order linear homogeneous differential equation?
7. Explain how to find the general solution of a second-order linear nonhomogeneous differential equation.
8. Explain the steps used to find the solution of an initial value problem that involves a second-order linear nonhomogeneous differential equation.
Basic Skills9–12. Classifying differential equations Determine the order of the following differential equations. Then state whether they are linear or nonlinear, and whether they are homogeneous or nonhomogeneous.
9. y� - 4y� + 2y = 10t2 10. y� = 2y3 - 4t
11. y� - 3yy� - y = et 12. z� + 16z = 0
13–22. Verifying solutions Verify by substitution that the following equations are satisfied by the given functions. Assume that c1 and c2 are arbitrary constants.
13. y� - 4y = 0; solution y = 3e2t - 5e-2t
14. y� + 16y = 0; solution y = 10 sin 4t - 20 cos 4t
15. y� - 9y = 18t; solution y = 4e3t + 3e-3t - 2t
16. y� + 25y = 12 cos t;
solution y = 2 sin 5t - 6 cos 5t +1
2 cos t
17. y� - y� - 2y = 0; solution y = c1e-t + c2e
2t
18. y� + 2y� - 3y = 5e2t; solution y = c1e-3t + c2e
t + e2t
19. y� + 6y� + 25y = 0; solution y = e-3t1c1 sin 4t + c2 cos 4t220. y� + 8y� + 25y = 50;
solution y = e-4t1c1 sin 3t + c2 cos 3t2 + 2
21. ty� - 1t + 12y� + y = 0, t 7 0; solution y = c1e
t + c21t + 1222. t2y� + 2ty� - 2y = 5t3, t 7 0;
solution y = c1t-2 + c2t +
t3
2
23–26. General solutions Two solutions of each of the following dif-ferential equations are given. If possible, give a general solution of the equation.
23. y� - 36y = 0; solutions 5e6t, 5e-6t624. y� + 5y = 0; solutions 5cos 15 t, sin 15 t625. y� + 2y� + y = 0; solutions 5e-t, te-t626. t2y� + ty� - y = 0, t 7 0; solutions 5 t, t-1627–30 Particular solutions Verify by substitution that the given func-tions are particular solutions of the following equations.
27. y� - y = 8e-3t; particular solution e-3t
M16_BRIG9324_01_SE_M16_01 pp2.indd 1180 19/07/12 10:37 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.1 BasicIdeas 1181
28. y� + y = 3cos2t;particularsolution2sint - cos2t
29. y� - 4y� + 4y = 2e2t;particularsolutiont2e2t
30. t2y� + ty� - 4y = 6t,t 7 0;particularsolution-2t + t2
31–34.ParticularsolutionsarenotuniqueTwo functions are given for each of the following differential equations. Show that both func-tions are particular solutions and that they differ by a solution of the homogeneous equation.
31. y� - 49y = -24e-t;particularsolutionse e-t
2,
e-t
2+ 3e7t f
32. y� + 16y = 30sint;particularsolutions52sint,2sint - 8cos4t6
33. y� - y� - 12y = 12et;particularsolutions5-et,6e4t - et634. t2y� + 2ty� - 30y = 12t2,t 7 0;
particularsolutionse-t2
2,3t5 -
t2
2f
35–38.GeneralsolutionsofnonhomogeneousequationsThree solu-tions of the following differential equations are given. Determine which two functions are solutions of the homogeneous equation and then write the general solution of the nonhomogeneous equation.
35. y� + 2y = 3et;solutions5sin12t,et,cos12t636. y� - 4y = 5cost;solutions55e2t,e-2t,-cost6
37. y� - 3y� +25
4y = 625t;solutions
5e3t>2cos2t,e3t>2sin2t,48 + 100t6
38. t2y� + 2ty� - 6y = 7t4,t 7 0;solutionse t -3,t4
2,t2 f
39–46.InitialvalueproblemsSolve the following initial value prob-lems using the given general solution.
39. y� + 9y = 0;y102 = 4,y�102 = 0;generalsolutiony = c1sin3t + c2cos3t
40. y� - y = 0;y102 = 2,y�102 = -2;generalsolutiony = c1e
t + c2e-t
41. y� - y� - 20y = 0;y102 = -3,y�102 = 3;generalsolutiony = c1e
5t + c2e-4t
42. y� + 4y = 5cos3t;y102 = 4,y�102 = 2;generalsolutiony = c1sin2t + c2cos2t - cos3t
43. y� - 16y = 16t2;y102 = 0,y�102 = 0;
generalsolutiony = c1e4t + c2e
-4t - t2 -1
8
44. t2y� + 2ty� - 2y = 0;y112 = 3,y�112 = 0;generalsolutiony = c1t
-2 + c2t
45. t2y� + ty� - 4y = 0;y112 = 1,y�112 = -1;generalsolutiony = c1t
-2 + c2t2
46. y� + 8y� + 25y = 0;y102 = 1,y�102 = -1;generalsolutiony = e-4t1c1sin3t + c2cos3t2
Further Explorations47. ExplainwhyorwhynotDeterminewhetherthefollowingstate-
mentsaretrueandgiveanexplanationorcounterexample.
a. Thegeneralsolutionofasecond-orderlineardifferentialequa-tioncouldbey = ce2t - t2,wherecisanarbitraryconstant.
b. Ifyhisasolutionofahomogeneousdifferentialequationy� + py� + qy = 0andypisaparticularsolutionoftheequa-tiony� + py� + qy = f ,thenyp + cyhisalsoaparticularsolution,foranyconstantc.
c. Thefunctions51 - cos2x,5sin2x6 arelinearlyindependentontheinterval30,2p4.
d. Ify1andy2aresolutionsoftheequationy� + yy� = 0,theny1 + y2isalsoasolutionoftheequation.
e. Theinitialvalueproblemy� + 2y = 0,y102 = 4hasauniquesolution.
48–53.SolutionverificationVerify by substitution that the following differential equations are satisfied by the given functions. Assume that c1 and c2 are arbitrary constants.
48. y� - 12y� + 36y = 0;solutiony1t2 = c1e6t + c2te
6t
49. y� - 12y� + 36y = 2e6t;solutiony = c1e
6t + c2te6t + t2e6t
50. y� + 4y = 8sin2t;solutiony = c1sin2t + c2cos2t - 2tcos2t
51. t2y� - 3ty� + 4y = 0,t 7 0;solutiony = c1t
2 + c2t2lnt
52. t2y� - 3ty� + 4y = 2t2,t 7 0;solutiony = c1t
2 + c2t2lnt + t2ln2t
53. t2y� + ty� + a t2 -1
4by = 0,t 7 0;
solutiony = t-1>21c1cost + c2sint254. Trigonometricsolutions
a. Verifybysubstitutionthaty = sintandy = costaresolu-tionsoftheequationy� + y = 0.
b. Writethegeneralsolutionofy� + y = 0.c. Verifybysubstitutionthaty = sin2tandy = cos2taresolu-
tionsoftheequationy� + 4y = 0.d. Writethegeneralsolutionofy� + 4y = 0.e. Basedontheresultsofparts(a)–(d),findthegeneralsolu-
tionoftheequationy� + k2y = 0,wherekisanonzerorealnumber.
55. HyperbolicfunctionsRecallthatthehyperbolicsineandcosine
aredefinedbysinht =et - e-t
2andcosht =
et + e-t
2.
a. Verifythaty = etandy = e-tarelinearlyindependentsolu-tionsoftheequationy� - y = 0.
b. Explain(withoutsubstituting)whyy = sinhtandy = coshtarelinearlyindependentsolutionsofthesameequation.
c. Verifybysubstitutionthaty = sinhtandy = coshtaresolu-tionsofy� - y = 0.
d. Givetwodifferentformsforthegeneralsolutionofy� - y = 0.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1181 19/07/12 12:43 PM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1182 Chapter 16 • Second-Order Differential Equations
and f is a specified function, is used to model both mechanical oscillators and electrical circuits. Depending on the values of p and q, the solutions to this equation display a wide variety of behavior.
a. Verify that the following equations have the given general solution.b. Solve the initial value problem with the given initial conditions.c. Graph the solution to the initial value problem, for t Ú 0.
64. y� + 16y = 0;y102 = 4,y�102 = -1 Generalsolutiony = c1sin4t + c2cos4t
65. y� + 3y� +25
4y = 0;y102 = 4,y�102 = 0.
Generalsolutiony = e-3t>21c1sin2t + c2cos2t266. y� + 9y = 8sint;y102 = 0,y�102 = 2. Generalsolutiony = c1sin3t + c2cos3t + sint
67. y� + 6y� + 25y = 20e-t;y102 = 2,y�102 = 0. Generalsolutiony = e-3t1c1sin4t + c2cos4t2 + e-t
68. A pursuit problemImagineadogstandingattheoriginanditsmasterstandingonthepositivex-axisonemilefromtheorigin(seefigure).Atthesameinstantthedogandmasterbeginwalk-ing.Thedogwalksalongthepositivey-axisat1mileperhourandthemasterwalksats 7 1milesperhouronapaththatisal-waysdirectedatthemovingdog.Thepathfollowedbythemasterinthexy-planeisthesolutionoftheinitialvalueproblem
y�1x2 =21 + y�1x22
sx,y112 = 0,y�112 = 0
Solvethisinitialvalueproblemusingthefollowingsteps.
1
y (north)
x (east)
Master
Dog
a. Noticethattheequationisfirst-orderiny�;soletu = y�,whichresultsintheinitialvalueproblem
u� =21 + u2
sx,u112 = 0.
b. Solvethisseparableequationusingthefactthat
Ldu21 + u2
= ln1u + 21 + u22 + c1toobtain
thegeneralsolutionu + 21 + u2 = c1x1>s.
c. Usetheinitialconditionu112 = 0toevaluatec1and
showthatu =1
21x1>s - x-1>s2.
d. Nowrecallthatu = y�.Solvetheequation
u = y� =1
21x1>s - x-1>s2byintegratingbothsides
withrespecttox.
T
e. Verifythatforanyrealnumberk,y = ektandy = e-ktarelinearlyindependentsolutionsoftheequationy� - k2y = 0.
f. Expressthegeneralsolutionofy� - k2y = 0intermsof5ekt,e-kt6 and5sinhkt,coshkt6 .
56–57. Higher-order equationsVerify by substitution that the follow-ing equations are satisfied by the given functions.
56. y� + 2y� - y� - 2y = 0;solutiony = c1e
-2t + c2e-t + c3e
t
57. y 142 - 16y = 0;solutiony = c1e
-2t + c2e2t + c3sin2t + c4cos2t
58–59. Nonlinear equations
58. Findthegeneralsolutionoftheequationy� - 2yy� = 0usingthefollowingsteps.
a. UsetheChainRuletoshowthatd
dt1y1t222 = 2y1t2y�1t2.
b. Writetheoriginaldifferentialequationasy�1t2 - 1y1t222� = 0.
c. Integratebothsidesoftheequationinpart(b)withrespecttottoobtainthefirst-orderseparableequationy� = y2 + c1.
d. Solvethisequation(seeSection8.3)tofindthegen-eralsolution.Notethattherearethreecasestoconsider:c1 7 0,c1 = 0,andc1 6 0.
59. Findthegeneralsolutionoftheequationy�y� = 1usingthefollowingsteps.
a. UsetheChainRuletoshowthatd
dt1y�1t222 = 2y�1t2y�1t2.
b. Writetheoriginaldifferentialequationas1y�1t222� = 2.c. Integratebothsidesoftheequationinpart(b)withrespecttot
toobtainthefirst-orderequationy� = {12t + c1,wherec1isanarbitraryconstant.
d. Solvethisequationtoshowthattherearetwofamilies
ofsolutions,y = c2 +1
312t + c123>2and
y = c2 -1
312t + c123>2,wherec2isanarbitraryconstant.
60–63. Not really second-orderAn equation of the form y� = F1t,y�2 (where F does not depend on y) can be viewed as a first-order equa-tion in y�. It may be attacked in two steps: (a) Let v = y� and solve the first-order equation v� = F1t,v2. (b) Having determined v, solve the first order equation y� = v. Use this method to find the general solution of the following equations. The methods of Sections 8.3 and 8.4 may be helpful.
60. y� = 2y�
61. y� = 3y� + 4
62. y� = e-y�
63. y� = 2t1y�22
Applications64–67. Oscillator and circuit equationsAs will be shown in Section 16.4, the equation y� + py� + qy = f1t2, where p and q are constants
T
M16_BRIG9324_01_SE_M16_01 pp2.indd 1182 23/07/12 10:50 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1183
e. Usetheinitialconditiony112 = 0toevaluatetheconstantofintegration.
f. Concludethatthepathofthemasterisgivenby
y =sx
2a x1>s
s + 1-
x-1>s
s - 1b +
s
s2 - 1.
g. Graphthepursuitpathsfors = 1.1,1.3,1.5,2.0.Explainthedependenceonsthatyouobserve.
Additional Exercises69. ConservationofenergyInsomecases,Newton’ssecondlawcan
bewrittenmx�1t2 = F1x2,wheretheforceFdependsonlyonthepositionx,andthereisafunctionw(calledapotential)suchthatw�1x2 = -F1x2.Systemswiththispropertyobeyanenergycon-servationlaw.
a. Multiplytheequationofmotionbyx�1t2andshowthattheequationcanbewritten
d
dt c 1
2m1x�1t222 + w1x2 d =
d
dt c 1
2mv2 + w1x2 d = 0.
b. DefinetheenergyofthesystemtobeE1t2 =1
2mv2 + w
(thesumofkineticandpotentialenergy)andshowthatE1t2isconstantintime.
70. ReductionoforderSupposeyouaresolvingasecond-orderlinearhomogeneousdifferentialequationandyouhavefoundonesolution.Amethodcalledreduction of orderallowsyoutofind
thesecond(linearlyindependent)solution(uptoevaluating
integrals).Considerthedifferentialequationy� -1
ty� +
1
t2y = 0, fort 7 0.
a. Verifythaty1 = tisasolution.Assumethesec-ondhomogeneoussolutionisy2andithastheformy21t2 = v1t2y11t2 = v1t2t,wherevisafunctiontobedetermined.
b. Substitutey2intothedifferentialequationandsimplifytheresultingequationtoshowthatvsatisfiesthe
equationv� = -v�
t.
c. Notethatthisequationisfirstorderinv�;soletw = v�to
obtainthefirst-orderequationw� = -w
t.
d. Solvethisseparableequationandshowthatw =c1
t.
e. Nowsolvetheequationv� = w =c1
ttofindv.
f. Finally,recallthaty21t2 = v1t2tandconcludethatthesecondsolutionisy21t2 = c1tlnt.
Quick check Answers
1. Firstorder,linear,nonhomogeneous;secondorder,linear,homogeneous 2. Thefirst,third,andfourthpairsarelin-earlyindependent.Thesecondpairislinearlydependent.3. Yes. 5. c1 = 0,c2 = 1.
➤
16.2 LinearHomogeneousEquationsUpuntilnow,youhavebeengivenafunctionandaskedtoverifybysubstitutionthatitsatisfiesaparticulardifferentialequation.Nowit’stimetocarryouttheactualsolutionprocess.Webeginwiththecaseofconstant-coefficienthomogeneousequationsoftheform
y�1t2 + py�1t2 + qy1t2 = 0,
wherepandqareconstants.Wesolvethisequationbymakingthefollowingobservation:Asolutionofthisequa-
tionisafunctionywhosederivativesy�andy�areconstantmultiplesofyitself,forallt.Theonlyfunctionswiththispropertyhavetheformy = ert,whererisaconstant.
Thisobservationsuggestsusingatrial solutionoftheformy = ert,wherermustbedetermined.Wesubstitutethetrialsolutionintotheequationandcarryoutthefollowingcalculation.
Quick check 1 Lety = ertandshowthaty�andy�areconstantmultiplesofy.
➤
¯˘˙ ¯˘˙1ert2� + p1ert2� + qert = 0 Substitute.
r 2ert rert
r 2ert + prert + qert = 0 Differentiate.
ert1r 2 + pr + q2 = 0 Factorert.
M16_BRIG9324_01_SE_M16_01 pp2.indd 1183 23/07/12 10:57 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1184 Chapter 16 • Second-Order Differential Equations
Recallthatouraimistofindvaluesofrthatsatisfythisequationforallt.Wemaycancelthefactorertbecauseitisnonzeroforallt.Whatremainsaftercancelingertisaquadratic(second-degree)equation
r 2 + pr + q = 0,
whichcanbesolvedfortheunknownr.Thepolynomialr 2 + pr + qiscalledthechar-acteristic polynomial(orauxiliary polynomial)forthedifferentialequation.
Itisimportanttoseewhattherootsofthecharacteristicpolynomiallooklike.Usingthequadraticformula,theyare
r1 =-p + 2p2 - 4q
2andr2 =
-p - 2p2 - 4q
2. (1)
Recallthatthreecasesarise.
•Ifp2 - 4q 7 0,thentherootsarerealwithr1 � r2,andtheyareexpressedexactlyasinexpression(1).
•Ifp2 - 4q = 0,thenthepolynomialhastherepeatedrootr1 = -p
2.
•Ifp2 - 4q 6 0,thenpolynomialhasapairofcomplexroots
r1 =-p + i24q - p2
2andr2 =
-p - i24q - p2
2.
Thesethreecasesproducedifferenttypesofsolutionstothedifferentialequation,andwemustexaminethemindividually.
Case 1: Real Distinct Roots of the Characteristic PolynomialSupposethatp2 - 4q 7 0andtherootsofthecharacteristicpolynomialarerealnumbersr1andr2,withr1 � r2.Weassumedthatsolutionsofthedifferentialequationhavetheformy = ert.Therefore,wehavefoundtwosolutions,y1 = er1tandy2 = er2t,whicharelinearlyindependentbecauser1 � r2.UsingwhatwelearnedinSection16.1,thegeneralsolutionofthedifferentialequationconsistsoflinearcombinationsofthesetwofunctions:
y = c1y1 + c2y2 = c1er1t + c2e
r2t.
ExamplE 1 General solution with real distinct roots Findthegeneralsolutionofthedifferentialequation
y� - 2y� - 4y = 0.
Solution Weformthecharacteristicpolynomialdirectlyfromthedifferentialequation;theequationthatmustbesolvedis
r 2 - 2r - 4 = 0.
Usingthequadraticformula,therootsarefoundtobe
r1 = 1 + 15andr2 = 1 - 15.
Therefore,thegeneralsolutionis
y = c1e11 +152t + c2e
11 -152t,
wherec1andc2arearbitraryconstants. Related Exercises 9–14
➤
ExamplE 2 Initial value problem with real distinct roots Solvetheinitialvalueproblem
y� + y� - 6y = 0,y102 = 0,y�102 = -5.
➤ AreviewofcomplexnumbersandthepropertiesthatweneedinthischapterisgiveninAppendixC.
➤ Noticethatyoudonotneedtosubstitutethetrialsolutionintoeverydifferentialequationyousolve.Thecharacteristicpolynomialcanbereaddirectlyfromthedifferentialequation;theorderofthederivativebecomesthepowerofr.
y� S r2
py� S pr
qy S q
Quick chEck 2 Whatisthecharacter-isticpolynomialfortheequationy� - y = 0?Whataretherootsofthepolynomial?
➤
M16_BRIG9324_01_SE_M16_02 pp2.indd 1184 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1185
Solution Tofindthegeneralsolution,wefindtherootsofthecharacteristicpolyno-mial,whichsatisfy
r 2 + r - 6 = 0.
Factoringthepolynomialorusingthequadraticformula,therootsarer1 = 2andr2 = -3.Therefore,thegeneralsolutionis
y = c1e2t + c2e
-3t.
Thearbitraryconstantsc1andc2arenowdeterminedusingtheinitialconditions.Notingthaty�1t2 = 2c1e
2t - 3c2e-3t,theinitialconditionsimplythat
y102 = c1e2 #0 + c2e
-3 #0 = c1 + c2 = 0
y�102 = 2c1e2 #0 - 3c2e
-3 #0 = 2c1 - 3c2 = -5.
Solvingthesetwoequationsgivestheconstantsc1 = -1andc2 = 1.Thesolutionoftheinitialvalueproblemnowfollows;itis
y = -e2t + e-3t.
Figure16.4showsthatthesolutiontotheinitialvalueproblem(inred)isoneofinfinitelymanyfunctionsofthegeneralsolution.Itistheonlyfunctionthatsatisfiestheinitialconditions.
y � �e2t � e�3t
�1 t1 2�2
4
8
�4
�8
y
FigurE 16.4 Related Exercises 15–20
➤
Case 2: Real Repeated Roots of the Characteristic PolynomialWenowassumethatp2 - 4q = 0,whichmeanstheonlyrootofthecharacteristicpoly-nomialis
0
r1 =-p + 2p2 - 4q
2= -
p
2
Thisonerootproducesthesolutiony1 = c1er1t,butwheredowefindasecond(linearly
independent)solution?Itmaybefoundbymakinganingeniousassumptionfollowedbyashortcalculation.
Becausethefirstsolutionhastheformy1 = c1er1t,wherec1isaconstant,welook
forasecondsolutionthathastheformy2 = v1t2er1t,wherev1t2isnotaconstant,buta
¸˚˝˚˛
M16_BRIG9324_01_SE_M16_02 pp2.indd 1185 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1186 Chapter 16 • Second-Order Differential Equations
functionoftthatmustbedetermined.Inthespiritofatrialsolution,wesubstitutey2intothedifferentialequationandseewhereittakesus.
BytheProductRule
y2�1t2 = v�1t2er1t + v1t2r1er1tand
y2�1t2 = v�1t2er1t + 2v�1t2r1er1t + v1t2r 1
2er1t.
Wenowsubstitutey2intothedifferentialequationy� + py� + qy = 0:➤ Themethodusedtofindy2iscalledreduction of order.Itmaybeappliedtoanysecond-orderlinearequationtofindasecondhomogeneoussolutionwhenonehomogeneoussolutionisknown.
v�er1t + 2v�r1er1t + vr 1
2er1t + p1v�er1t + vr1er1t2 + qver1t Substitute.
y2� y2� y2
= er1t1v� + 12r1 + p2v� + v1r 12 + pr1 + q22 Collectterms.
0 0
= er1tv� = 0. r1 = -p
2isaroot.
¯˚˚˘˚˚˙¯˚˚˚˚˚˘˚˚˚˚˚˙ ¯˘˙
¯˚˘˚˙ ¯˚˚˘˚˚˙
Weusedthefactthat2r1 + p = 0becauser1 = -p
2.Inaddition,r1isarootofthe
characteristicpolynomial,whichimpliesthatr 12 + pr1 + q = 0.Aftermakingthese
simplifications,weareleftwiththeequationer1tv�1t2 = 0.Becauseer1tisnonzeroforallt,wecancelthisfactor,leavinganequationfortheunknownfunctionv;itissimplyv�1t2 = 0.
Wesolvethisequationbyintegratingoncetogivev�1t2 = c1,andthenagaintogivev1t2 = c1t + c2,wherec1andc2arearbitraryconstants.Rememberthatthiscalculationbeganbyassumingthatthesecondhomogeneoussolutionhastheformy2 = v1t2er1t.Nowthatwehavefoundv,wecanwrite
y2 = v1t2er1t = 1c1t + c22er1t = c1ter1t + c2e
r1t
new y1 solution
Thiscalculationhasproducedthefirstsolutiony1 = er1t,aswellasthesecondsolutionthatwesought,y2 = ter1t.Sothemysteryissolved.Thetwolinearlyindependentsolu-tionsare5er1t,ter1t6 ,andthegeneralsolutionintherepeatedrootcaseis
y = c1er1t + c2te
r1t.
ExamplE 3 Initial value problem with repeated roots Solvetheinitialvalueproblem
y� + 4y� + 4y = 0,y102 = 8,y�102 = 4.
Solution Solvingtheequation
r 2 + 4r + 4 = 1r + 222 = 0,
thecharacteristicpolynomialhasthesinglerepeatedrootr1 = -2.Therefore,thegeneralsolutionofthedifferentialequationis
y = c1e-2t + c2te
-2t.
Weappealtotheinitialconditionstoevaluatetheconstantsinthegeneralsolution.Inthiscase,
y�1t2 = -2c1e-2t + c21e-2t - 2te-2t2 = e-2t1-2c1 + c2 - 2tc22.
Theinitialconditionsimplythat
y102 = c1e-2 #0 + c2
# 0 # e-2 #0 = c1 = 8
y�102 = e-2 #01-2c1 + c2 - 2 # 0 # c22 = -2c1 + c2 = 4.
Quick chEck 3 Whatisthecharacter-isticpolynomialfortheequationy� + 2y� + y = 0?Givethetwolin-earlyindependentsolutionsoftheequation.
➤
¯˘˙ ¯˘˙
M16_BRIG9324_01_SE_M16_02 pp2.indd 1186 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1187
Solvingthesetwoequationsgivesthesolutionsc1 = 8andc2 = 20.Thesolutionoftheinitialvalueproblemis
y = 8e-2t + 20te-2t.
Thebehaviorofthissolutionisworthinvestigatingbecausesolutionsofthisformariseinpractice.Figure16.5showsseveralfunctionsofthegeneralsolutionalongwiththefunctionthatsatisfiestheinitialvalueproblem(inred).Ofparticularimportanceisthefactthatforallthesesolutions, lim
tS�y1t2 = 0.Ingeneral,whena 7 0,wehave
limtS�
te-at = 0and limtS�
teat = � .
y � 8e�2t � 20te�2t
t2 31�1
4
8
�4
�8
y
FigurE 16.5 Related Exercises 21–26
➤
Case 3: Complex Roots of the Characteristic PolynomialThethirdcaseariseswhenp2 - 4q 6 0,whichimpliesthattherootsofthecharacteristicpolynomialoccurincomplexconjugatepairs.Therootsare
r1 =-p + i24q - p2
2andr2 =
-p - i24q - p2
2,
whichweabbreviateasr1 = a + ibandr2 = a - ib,wherea = -p
2andb =
24q - p2
2
arerealnumbers.Itiseasytowritethegeneralsolutionofthedifferentialequationas
y = c1er1t + c2e
r2t = c1e1a + ib2t + c2e
1a - ib2t,
butwhatdoesitmean?Weexpectareal-valuedsolutiontoadifferentialequationwithrealcoefficients.Abitofworkisrequiredtoexpressthissolutionwithreal-valuedfunc-tions.Usingpropertiesofexponentialfunctions,wefirstfactoreatandwrite
y = eat1c1eibt + c2e
-ibt2.
Writteninthisform,weseethattwosolutionsofthedifferentialequationareeateibtandeate-ibt.Nowrecallthatlinearcombinationsofsolutionsarealsosolutions.Weusethefactsthat
cosbt =eibt + e-ibt
2andsinbt =
eibt - e-ibt
2i
toformthefollowinglinearcombinations:
1
2eateibt +
1
2eate-ibt = eat # eibt + e-ibt
2= eatcosbt
1
2ieateibt -
1
2ieate-ibt = eat # eibt - e-ibt
2i= eatsinbt.
➤ Thecomplexconjugateofa + ibisa - ib.SeeAppendixCforeverythingyouneedtoknowinthischapteraboutcomplexnumbers.
M16_BRIG9324_01_SE_M16_02 pp2.indd 1187 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1188 Chapter 16 • Second-Order Differential Equations
Nowwehavetworeal-valued,linearlyindependentsolutions:eatcosbtandeatsinbt.Therefore,inthecaseofcomplexroots,thegeneralsolutionis
y = c1eatcosbt + c2e
atsinbt,
wherea = -p
2andb =
24q - p2
2.Recallthattherootsofthecharacteristicpolynomial
area { ib.Therefore,therealpartofeachrootisa,whichdeterminestherateofexpo-nentialgrowthordecayofthesolution.Theimaginarypartofeachrootisb,whichdeter-minestheperiodofoscillationofthesolution;weseethattheperiodis2p>b.
ExamplE 4 Initial value problem with complex roots Solvetheinitialvalueproblem
y� + 16y = 0,y102 = -2,y�102 = 6.
Solution Therootsofthecharacteristicpolynomialsatisfyr 2 + 16 = 0;inthiscase,wehavethepureimaginaryrootsr1 = 4iandr2 = -4i.Therefore,thegeneralsolutiony = c1e
atcosbt + c2eatsinbtwitha = 0andb = 4becomes
y = c1cos4t + c2sin4t.
Beforeusingtheinitialconditions,wecomputey�1t2 = -4c1sin4t + 4c2cos4t.Theinitialconditionsimplythat
y102 = c1cos14 # 02 + c2sin14 # 02 = c1 = -2
y�102 = -4c1sin14 # 02 + 4c2cos14 # 02 = 4c2 = 6.
Weconcludethatc1 = -2andc2 =3
2,makingthesolutionoftheinitialvalueproblem
y = -2cos4t +3
2sin4t.
ThesolutionisshowninFigure16.6(inred),alongwithseveralotherfunctionsofthegeneralsolution.Whentherootsofthecharacteristicpolynomialarepureimaginarynumbers,asinthiscase,thesolutionisoscillatorywithnogrowthorattenuationofthesolution.Inthiscase,withb = 4,theperiodofthesolutionis2p>4 = p>2.
Quick chEck 4 Whatisthecharacter-isticpolynomialfortheequationy� + y = 0?Whataretherootsofthepolynomial?
➤
t�
1
2
�1
�2
�
y
2� ��
2�
y � �2cos 4t � �sin 4t32
FigurE 16.6 Related Exercises 27–32
➤
M16_BRIG9324_01_SE_M16_02 pp2.indd 1188 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1189
ExamplE 5 Initial value problem with complex roots Solvetheinitialvalueproblem
y� + y� +5
4y = 0,y102 = 2,y�102 = 2.
Solution Usingthequadraticformula,thecharacteristicpolynomialr 2 + r +5
4has
rootsr1 = -1
2+ iandr2 = -
1
2- i.Identifyinga = -
1
2andb = 1,thegeneral
solutionis
y = c1e-t>2cost + c2e
-t>2sint.
Beforeusingtheinitialconditions,wecompute
y�1t2 = c1a-1
2e-t>2cost - e-t>2sintb + c2a-
1
2e-t>2sint + e-t>2costb .
Theinitialconditionsimplythat
y102 = c1 = 2
y�102 = -1
2c1 + c2 = 2.
Theseconditionsaresatisfiedprovidedc1 = 2andc2 = 3.Therefore,thesolutiontotheinitialvalueproblemis
y = 2e-t>2cost + 3e-t>2sint.
Thesolutionisawavewithanattenuatedamplitude(Figure16.7).Thedampedwavefitsnicelywithinanenvelopeformedbyfunctionsoftheformy = {Ae-t>2(dashedcurves).
t
1
0
2
�1
�2
y
y � 2e�t /2 cos t � e�t /2 sin t
�2� 3�
22�
FigurE 16.7 Related Exercises 27–32
➤
Figure16.8givesagraphicalinterpretationinthepq-planeofthethreecasesthatarisein
solvingtheequationy� + py� + qy = 0.Weseethattheparabolaq =p2
4dividesthe
planeintotworegions.Valuesof1p,q2abovetheparabolacorrespondtoequationswhosecharacteristicpolynomialshavecomplexroots,whereasthosevaluesbelowtheparabolacorrespondtothecaseofrealdistinctroots.Theparabolaitselfrepresentsthecaseofrepeatedrealroots.Table16.1alsosummarizesthethreecases.
p2 � 4q � 0Complex roots
p2 � 4q � 0Real roots
�1 p1 2�2
1
�1
q
p2
4q �
FigurE 16.8
M16_BRIG9324_01_SE_M16_02 pp2.indd 1189 19/07/12 12:46 PM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1190 Chapter 16 • Second-Order Differential Equations
Amplitude-Phase FormWepauseheretomentiontwotechniquesthatappearinupcomingwork.Theuseoftheamplitude-phaseformofasolutionmaybefamiliar,butit’sworthreviewing.Afunctionoftheformy = c1sinvt + c2cosvt(whicharisesinsolutionsinCase3above)isdif-ficulttovisualize.However,functionsofthisformmayalwaysbeexpressedintheformy = Asin1vt + w2ory = Acos1vt + w2.Ifwechoosey = Asin1vt + w2,therela-tionshipsamongtheamplitude A,thephasew,andc1andc2are
A = 2c12 + c2
2andtanw =c2
c1.
(SeeExercise40;Exercise41givessimilarexpressionsforAcos1vt + w2.)Thefunc-tiony = Asin1vt + w2isashiftedsinefunctionwithconstantamplitudeAandfre-quencyv. For example, consider the function y = -2sin3t + 2cos3t. Lettingc1 = -2andc2 = 2,wehave
A = 21-222 + 22 = 222andtanw =2
-2,
whichimpliesthatw =3p
4.Therefore,thefunctioncanalsobewrittenas
y = 212sina3t +3p
4b = 212sin3a t +
p
4b .
The function isnowseen tobea sinewavewithamplitude212andperiod2p
3,
shiftedp
4unitstotheleft(Figure16.9).
➤ Weusethecoordinatedefinition
tanw =y
xtodeterminew.Inthiscase
y 7 0andx 6 0.Therefore,wisanangleinthesecondquadrant.
table 16.1 Cases for the equation y� � py� � qy � 0
roots general solution
p2 - 4q 7 0 r1,2 =-p { 2p2 - 4q
2y = c1e
r1t + c2er2t
p2 - 4q = 0 r1 = r2 = -p
2y = c1e
r1t + c2ter1t
p2 - 4q 6 0 r1,2 = a { ib,a = -p
2,b =
24q - p2
2y = eat1c1sinbt + c2cosbt2
t0
2
1
�1
�2
y
y � �2sin 3t � 2cos 3t � 2 2 sin(3t � 3 /4)
�2�
�
�3
FigurE 16.9
M16_BRIG9324_01_SE_M16_02 pp2.indd 1190 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1191
The Phase PlaneIntheremainderofthischapter,weoccasionallyusethephase planetodisplaysolutionsofdifferentialequations.Ratherthangraphthesolutionyasafunctionoft,weinsteadmakeaparametricplotofyandy�.Thephaseplanerevealsfeaturesofthesolutionthatmaynotbeapparentintheusualtime-dependentgraph.
Consider the periodic function y = sint - 2cost, whose graph is shown inFigure16.10a.Inthephase-planegraphofthefunction(Figure16.10b),theparametertdoesnotappearexplicitly.However,thecurvehasanorientation(indicatedbythearrow)thatshowsthedirectionofincreasingt.Anypointonthecurvecorrespondstoatleastonesolutionvalue;forexample,thepoint1y102,y�1022(shownonthecurve)isalsoas-sociatedwitht = 2p,4p,c.Thefactthatthecurveisclosedreflectsthefactthatthefunctionisperiodic.
(y(0), y�(0))y � sin t � 2 cos t
�1�2 y1 2�3
2
1
�3
�2
�1
y�
(b)(a)
t
1
0
2
�1
�2
y
�2� 3�
22�
FigurE 16.10
Incontrast,considerthefunctiony = e-t>41sint - 2cost2,whosegraphinshowninFigure16.11a.Thephase-planeplot(Figure16.11b)isaninwardspiralthatgivesadistinctivepictureofthedecayingamplitudeofthefunction.
�1 y1 2�2
1
2
�1
�2
2
y�y
(b)(a)
(y(0), y�(0))y � e�t /4 (sin t � 2cos t)
t
1
0
�2
�1
�2 �4
FigurE 16.11
M16_BRIG9324_01_SE_M16_02 pp2.indd 1191 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1192 Chapter 16 • Second-Order Differential Equations
The Cauchy-Euler EquationWeclosethissectionwithabrieflookatasecond-orderlinearvariable-coefficientequa-tionthatcanalsobesolvedusingrootsofpolynomials.TheCauchy-Euler(orequi-dimensional)equationhastheform
t2y�1t2 + aty�1t2 + by1t2 = 0,
whereaandbareconstantsandt 7 0.Thedefiningfeatureofthisequationisthatineachtermthepoweroftmatchestheorderofthederivative.Assumingt 7 0,bothsidesoftheequationmaybedividedbyt2toproducetheequation
y�1t2 +a
ty�1t2 +
b
t2y1t2 = 0.
Weseethatthecoefficientsofy�andyarenotcontinuousonanyintervalcontainingt = 0.Forthisreason,initialvalueproblemsassociatedwiththisequationareposedonintervalsthatdonotincludetheorigin.
Theequationissolvedusingatrialsolutionoftheformy = tp,wheretheexponentpmustbedetermined.Substitutingthetrialsolutionintothedifferentialequation,wefindthat
t21tp2� + at1tp2� + b1tp2 = 0 Substitutetrialsolution.
p1p - 12tp + aptp + btp = 0 Differentiate.
tp1p1p - 12 + ap + b2 = 0 Collectterms.
tp1p2 + 1a - 12p + b2 = 0. Simplify.
Ifweassumethatt 7 0,thentp 7 0andwemaydividethroughtheequationbytp.Do-ingsoleavesapolynomialequationtobesolvedfortheunknownp.Whenthequadraticequationp2 + 1a - 12p + b = 0issolved,weagainhavethreecases.Iftherootsarerealanddistinct,callthemp1andp2withp1 � p2,thenwehavetwolinearlyindepen-dentsolutions5 tp1,tp26 .Thegeneralsolutionofthedifferentialequationis
y = c1tp1 + c2t
p2.
Thecasesinwhichtherootsarerealandrepeated,andinwhichtherootsarecomplex,areexaminedinExercises52–59and62–64.
ExamplE 6 Cauchy-Euler initial value problem Solvetheinitialvalueproblem
t2y� + 2ty� - 2y = 0,y112 = 0,y�112 = 3.
Solution Substitutingthetrialsolutiony = tpintothedifferentialequationproducesthepolynomial
p2 + p - 2 = 1p - 121p + 22 = 0.
Therootsarep1 = 1andp2 = -2,whichgivesthegeneralsolution
y = c1t + c2t-2.
Toimposetheinitialconditions,wemustcompute
y�1t2 = c1 - 2c2t-3.
Theinitialconditionsnowimplythat
y112 = c1 + c2 = 0
y�112 = c1 - 2c2 = 3.
Thesolutionofthissetofequationsisc1 = 1andc2 = -1.Therefore,thesolutionoftheinitialvalueproblemis
y = t - t-2.
Severalfunctionsofthegeneralsolutionalongwiththesolutionoftheinitialvalueprob-lem(inred)areshowninFigure16.12. Related Exercises 33–38
➤
Quick chEck 5 Whatisthepolyno-mialassociatedwiththeequationt2y� + ty� - y = 0?Whataretherootsofthepolynomial?
➤
1 2 3
�3
�2
�1
3
2
1
y � t � t�2
t
y
�
FigurE 16.12
M16_BRIG9324_01_SE_M16_02 pp2.indd 1192 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.2 LinearHomogeneousEquations 1193
SEction 16.2 ExErciSESReview Questions1. Givethetrialsolutionusedtosolvelinearconstant-coefficient
homogeneousdifferentialequations.
2. Whatisthecharacteristicpolynomialassociatedwiththeequationy� - 3y� + 10 = 0?
3. Givethethreecasesthatarisewhenfindingtherootsofthecharacteristicpolynomial.
4. Whatistheformofthegeneralsolutionofasecond-orderconstant-coefficientequationwhenthecharacteristicpolynomialhastwodistinctrealroots?
5. Whatistheformofthegeneralsolutionofasecond-orderconstant-coefficientequationwhenthecharacteristicpolynomialhasrepeatedrealroots?
6. Whatistheformofthegeneralsolutionofasecond-orderconstant-coefficientequationwhenthecharacteristicpolynomialhascomplexroots?
7. Thecharacteristicpolynomialforasecond-orderequationhasroots-2 { 3i.Givetherealformofthegeneralsolution.
8. Givethetrialsolutionusedtosolveasecond-orderCauchy-Eulerequation.
Basic Skills9–14. General solutions with distinct real rootsFind the general solution of the following differential equations.
9. y� - 25y = 0
10. y� - 2y� - 15y = 0
11. y� - 3y� = 0
12. y� - y� -3
4y = 0
13. 2y� + 6y� - 20y = 0
14. y� -5
2y� + y = 0
15–20. Initial value problems with distinct real rootsFind the gen-eral solution of the following differential equations. Then solve the given initial value problem.
15. y� - 36y = 0;y102 = 3,y�102 = 0
16. y� - 6y� = 0;y102 = -1,y�102 = 2
17. y� - 3y� - 18y = 0;y102 = 0,y�102 = 4
18. y� + 8y� + 15y = 0;y102 = 2,y�102 = 4
19. y� - 2y� -5
4y = 0;y102 = 3,y�102 = 0
20. y� - 10y� + 21y = 0;y102 = -3,y�102 = -1
21–26. Initial value problems with repeated real rootsFind the general solution of the following differential equations. Then solve the given initial value problem.
21. y� - 2y� + y = 0;y102 = 4,y�102 = 0
22. y� + 6y� + 9y = 0;y102 = 0,y�102 = -1
23. y� - y� +1
4y = 0;y102 = 1,y�102 = 2
24. y� - 412y� + 8y = 0;y102 = 1,y�102 = 0
25. y� + 4y� + 4y = 0;y102 = 1,y�102 = 0
26. y� + 3y� +9
4y = 0;y102 = 0,y�102 = 3
27–32. Initial value problems with complex rootsFind the general solution of the following differential equations. Then solve the given initial value problem.
27. y� + 9y = 0;y102 = 8,y�102 = -8
28. y� + 6y� + 25y = 0;y102 = 4,y�102 = 0
29. y� - 2y� + 5y = 0;y102 = 1,y�102 = -1
30. y� + 4y� + 5y = 0;y102 = 2,y�102 = -2
31. y� + 6y� + 10y = 0;y102 = 0,y�102 = 6
32. y� - y� +1
2y = 0;y102 = 3,y�102 = -2
33–38. Initial value problems with Cauchy-Euler equationsFind the general solution of the following differential equations, for t Ú 1. Then solve the given initial value problem.
33. t2y� + ty� - y = 0;y112 = 2,y�112 = 0
34. t2y� + 2ty� - 12y = 0;y112 = 0,y�112 = 6
35. t2y� - ty� - 15y = 0;y112 = 6,y�112 = -1
36. t2y� + 4ty� - 4y = 0;y112 = 5,y�112 = -3
37. t2y� + 6ty� + 6y = 0;y112 = 0,y�112 = -4
38. t2y� + ty� - 2y = 0;y112 = 8,y�112 = -12
Further Explorations39. Explain why or why notDeterminewhetherthefollowingstate-
mentsaretrueandgiveanexplanationorcounterexample.
a. Tosolvetheequationy� + ty� + 4y = 0youshouldusethetrialsolutiony = ert.
b. Theequationy� + ty� + 4t2y = 0isaCauchy-Eulerequation.
c. Asecond-orderdifferentialequationwithconstantrealcoefficientshasacharacteristicpolynomialwithroots2 + 3iand-2 + 3i.
d. Thegeneralsolutionofasecond-orderhomogeneousdifferentialequationwithconstantrealcoefficientscouldbey = c1cos2t + c2sintcost.
e. Thegeneralsolutionofasecond-orderhomogeneousdifferentialequationwithconstantrealcoefficientscouldbey = c1cos2t + c2sin3t.
M16_BRIG9324_01_SE_M16_02 pp2.indd 1193 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1194 Chapter 16 • Second-Order Differential Equations
40. Amplitude-phaseformThegoalistoexpressthefunctiony = c1sinvt + c2cosvtintheformy = Asin1vt + w2,wherec1andc2areknown,andAandwmustbedetermined.
a. Usetheidentitysin1u + v2 = sinucosv + cosusinvtoexpandy = Asin1vt + w2.
b. Equatetheresultofpart(a)toy = c1sinvt + c2cosvt,andmatchcoefficientsofsinvtandcosvttoconcludethatc1 = Acoswandc2 = Asinw.
c. SolveforAandwtoconcludethatA = 2c12 + c2
2and
tanw =c2
c1.
41. Amplitude-phaseformThefunctiony = c1sinvt + c2cosvtcanalsobeexpressedintheformy = Acos1vt + w2,wherec1andc2areknown,andAandwmustbedeter-mined.UsetheprocedureinExercise40withtheidentitycos1u + v2 = cosucosv - sinusinvtoconcludethat
A = 2c12 + c2
2andtanw = -c1
c2.
42–45.Convertingtoamplitude-phaseformExpress the following functions in the form y = Asin1vt + w2. Check your work by graph-ing both forms of the function.
42. y = 2sin3t - 2cos3t
43. y = -3sin4t + 3cos4t
44. y = 13sint + cost
45. y = -sin2t + 13cos2t
46–51.Higher-orderequationsHigher-order equations with constant coefficients can also be solved using the trial solution y = ert and find-ing roots of a characteristic polynomial. Find the general solution of the following equations.
46. y� - 4y� = 0
47. y� - y� - 6y� = 0
48. y� + y� = 0
49. y� - 6y� + 8y� = 0
50. y 142 - 5y� + 4y = 0
51. y 142 + 5y� + 4y = 0
52–55.Cauchy-EulerequationwithrepeatedrootsIt can be shown (Exercise 62) that when the polynomial associated with a second-order Cauchy-Euler equation has the repeated root r = r1, the second lin-early independent solution is y = t r1lnt, for t 7 0. Find the general solution of the following equations.
52. t2y� - ty� + y = 0
53. t2y� + 3ty� + y = 0
54. t2y� - 3ty� + 4y = 0
55. t2y� + 7ty� + 9y = 0
56–59.Cauchy-EulerequationwithcomplexrootsIt can be shown (Exercise 64) that when the polynomial associated with a second-order Cauchy-Euler equation has complex roots r = a { ib, the linearly independent solutions are 5 tacos1blnt2,tasin1blnt26 , for t 7 0. Find the general solution of the following equations.
56. t2y� + ty� + y = 0
57. t2y� + 7ty� + 25y = 0
58. t2y� - ty� + 5y = 0
59. t2y� +1
2y = 0
ApplicationsSection 16.4 is devoted to applications of second-order equations.
60. OscillatorsandcircuitsAsweshowinSection16.4,theequationy� + py� + qy = 0isusedtomodelmechanicaloscilla-torsandelectricalcircuitsintheabsenceofexternalforces(oftencalledfreeoscillations).Considerthisequationinthecaseofcomplexroots1p2 - 4q 6 02,inwhichcasethegeneralsolutionhastheformeat1c1cosbt + c2sinbt2.
a. Inthegeneralsolution,leta = -1
2,c1 = 2,and
c2 = 0.Graphthesolutionontheinterval0 … t … 2p,withb = 1,2,3,4.Whatisthetimeintervalbetweensuccessivemaximaoftheoscillation?
b. Foreachfunctioninpart(a),whatisthefrequencyoftheoscil-lation(i)measuredincyclesperunitoftimeand(ii)measuredinunitsofcyclesper2punitsoftime?
c. Inthegeneralsolution,letb = 2,c1 = 2,andc2 = 0.Graphthesolutionontheinterval0 … t … 2p,witha = -0.1,-0.5,-1,-1.5,-2.Ineachcase,howlongdoesittakefortheamplitudeoftheoscillationtodecayto1/3ofitsinitialvalue?
d. Graphthesolutiony = e-t>212cos2t - sin2t2.Whatisthetimeintervalbetweensuccessivemaximaoftheoscilla-tion?Roughlyhowlongdoesittakefortheamplitudeoftheoscillationtodecayto1/3ofitsinitialvalue?
61. BucklingcolumnAmodelofthebucklingofanelasticcolumnin-volvesthefourth-orderequationy 1421x2 + k2y�1x2 = 0,wherekisapositiverealnumber.Findthegeneralsolutionofthisequation.
Additional Exercises62. Cauchy-EulerequationwithrepeatedrootsOneofseveral
waystofindthesecondlinearlyindependentsolutionofaCauchy-Eulerequation
t2y�1t2 + aty�1t2 + by1t2 = 0,fort 7 0
inthecaseofarepeatedrealrootistochangevariables.
a. Whatisthepolynomialassociatedwiththisequation?b. Showthatifwelett = ex(orx = lnt),thenthisequation
becomestheconstantcoefficientequation
y�1x2 + 1a - 12y�1x2 + by1x2 = 0.
c. Whatisthecharacteristicpolynomialfortheequationinpart(b)?Concludethatifthepolynomialinpart(a)hasarepeatedroot,thenthecharacteristicpolynomialalsohasarepeatedroot.
d. Writethegeneralsolutionoftheequationinpart(b)inthecaseofarepeatedroot.
e. Expressthesolutioninpart(d)intermsoftheoriginalvariablettoshowthatthesecondlinearlyindependentsolutionoftheCauchy-Eulerequationisy = t11 - a2>2lnt.
T
M16_BRIG9324_01_SE_M16_02 pp2.indd 1194 23/07/12 10:59 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.3 LinearNonhomogeneousEquations 1195
63. Cauchy-Euler equation with repeated roots againHereisanotherinstructivecalculationthatleadstothesecondlin-earlyindependentsolutionofaCauchy-Eulerequationinthecaseofarepeatedroot.Assumetheequationhastheformt2y� + aty� + by = 0,fort 7 0,andthatthecorrespondingpolynomialhasarepeatedroot.
a. Showthattherepeatedrootisp =1 - a
2,whichimplies
that2p + a = 1.b. Assumethesecondsolutionhastheformy1t2 = tpv1t2,where
thefunctionvmustbedetermined.Substitutethesolutioninthisformintotheequation.Aftersimplificationandusingpart(a),showthatvsatisfiestheequationt2v� + tv� = 0.
c. Thisequationisfirstorderinv�,soletw = v�andsolve
forwtofindthatw =c1
t,wherec1isanarbitraryconstant
ofintegration.
d. Nowsolvetheequationv� = w =c1
tforvandshowthat
y1t2 = tpv1t2isthecompletegeneralsolution(withtwolin-earlyindependentsolutions).
64. Cauchy-Euler equation with complex rootsTofindthegeneralsolutionofaCauchy-Eulerequation
t2y�1t2 + aty�1t2 + by1t2 = 0,fort 7 0
inthecaseofcomplexroots,wechangevariablesasinExercise62.
a. Showthatwitht = ex(orx = lnt),theoriginaldifferentialequationcanbewritten
y�1x2 + 1a - 12y�1x2 + by1x2 = 0.
b. Solvethisconstant-coefficientequationinthecaseofcomplexroots.ThenexpressthesolutionintermsofttoshowthatthegeneralsolutionoftheCauchy-Eulerequationisy = c1tacos1blnt2 + c2tasin1blnt2,where
a =1 - a
2andb =
1
224b - 1a - 122.
65. Finding the second solution Considertheconstant-coefficientequationy� + py� + qy = 0inthecasethatthecharacteristicpolynomialhastwodistinctrealrootsr1andr2.Thegeneralsolu-tionisy = c1e
r1t + c2er2t.
a. Explainwhyu =er1t - er2t
r1 - r2isasolutionoftheequation.
b. Nowconsidertandr2fixedandletr1 S r2inordertoinvesti-gatewhathappensasthedistinctrootsbecomearepeatedroot.Evaluate lim
r1Sr2
uandidentifybothlinearlyindependent
solutionsintherepeatedrootcase.
66. Finding the second solution againConsidertheconstant-coefficientequationy� + py� + qy = 0inthecasethatthechar-acteristicpolynomialhasarepeatedroot,whichwecallr.Hereisanotherwaytofindthesecondlinearlyindependentsolution.Becausey = ertisasolution,wewrite
1ert2� + p1ert2� + q1ert2 = 0.
Wenowdifferentiatebothsidesofthisequationwithrespecttor,assumingthattheorderofdifferentiationwithrespecttotandrmaybeinterchanged.Showthattheresultistheequation
1tert2� + p1tert2� + q1tert2 = 0,
whichimpliesthaty = tertisalsoasolution.
Quick chEck anSwErS
1. Ify = ert,theny� = rert = ryandy� = r 2ert = r 2y.2. r 2 - 1 = 0;rootsr = {1 3. r 2 + 2r + 1 = 0;solutions5e-t,te-t6 4. r 2 + 1 = 0;rootsr = { i5. p2 - 1 = 0;rootsp = {1.
➤
16.3 LinearNonhomogeneousEquationsThehomogeneousequationsdiscussedintheprevioussectionareusedtomodelmechani-calandelectricaloscillatorsintheabsenceofexternalforces.Equallyimportantareos-cillatorsthataredrivenbyexternalforces(suchasanimposedloadoravoltagesource).Whenexternalforcesareincludedinadifferentialequationsmodel,theresultisanon-homogeneousequation,whichisthesubjectofthissection.
Solutionsofahomogeneousoscillatorequationareoftencalledfree oscillations.Theyrepresentthenaturalresponseofasystemtoaninitialdisplacementorvelocity—asspecifiedbytheinitialconditions.Forexample,supposeablockonaspringispulledawayfromitsequilibriumpositionandthenreleased.Ifnoexternalforcesactonthesys-tem,themotionoftheblockisdeterminedbytheinitialconditions,therestoringforceofthespring(whichdependsonthedisplacementoftheblock),andpossiblyfriction(whichoftendependsonthevelocityoftheblock).Inthiscase,weobservethesystemrespondingwithoutoutsideinfluences.
M16_BRIG9324_01_SE_M16_02 pp2.indd 1195 19/07/12 10:44 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1196 Chapter 16 • Second-Order Differential Equations
Procedure Solving Initial Value Problems
Usethefollowingstepstosolvetheinitialvalueproblem
y� + py� + qy = f1t2,y102 = A,y�102 = B.
1. Findtwolinearlyindependentsolutionsy1andy2ofthehomogeneousequationy� + py� + qy = 0.
2. Findanyparticularsolutionypofthenonhomogeneousequationy� + py� + qy = f1t2.
3. Formthegeneralsolutiony = c1y1 + c2y2 + yp.
4. Usetheinitialconditionsy102 = Aandy�102 = Btodeterminetheconstantsc1andc2.
¯˚˘˚˙ ¯˘˙
Ifanexternalforceispresent,thentheresultingresponseofthesystemiscalledaforced oscillation;itisacombinationofthenaturalresponseandtheeffectsoftheforce.Inordertounderstandforcedoscillations,wemustknowsolutionsofthenon-homogeneousequation(forcespresent)andsolutionsofthehomogeneousequation(forcesabsent).
Particular SolutionsWenowconsidersecond-orderequationsoftheform
y�1t2 + py�1t2 + qy1t2 = f1t2,
wherepandqareconstants,andfisaspecifiedfunctionthatisnotidenticallyzeroontheintervalofinterest.Recallthatanysolutionofthisequationiscalledaparticular solu-tion,whichwedenoteyp.AsprovedinSection16.1,thereareinfinitelymanyparticularsolutionsofagivenequation,alldifferingbyasolutionofthehomogeneousequation.AlsoshowninSection16.1isthatifthehomogeneousequation
y�1t2 + py�1t2 + qy1t2 = 0
hasthelinearlyindependentsolutionsy1andy2,thenthegeneralsolutionofthenonhomo-geneousequationis
y = c1y1 + c2y2 + yp,
solutionofthe particular homogeneous solution equation
wherec1andc2arearbitraryconstants.Ifinitialconditionsaregiven,theyareusedtodeterminec1andc2.Sotheprocedureforsolvinginitialvalueproblemsassociatedwithanonhomogeneousequationconsistsofthefollowingsteps.
➤ Informingthegeneralsolutionofanonhomogeneousequation,itdoesn’tmatterwhichoftheinfinitelymanyparticularsolutionsyouuse.Becausetwoparticularsolutionsdifferbyasolutionofthehomogeneousequation,thedifferencebetweentwoparticularsolutionsisabsorbedinthetermsc1y1 + c2y2.
Wealreadyknowhowtofindsolutionsofthehomogeneousequation,sowenowturntomethodsforfindingparticularsolutions.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1196 19/07/12 10:46 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.3 LinearNonhomogeneousEquations 1197
Method of Undetermined CoefficientsIntheory,theright-sidefunctionfcouldbeanycontinuousorpiecewisecontinuousfunc-tion.Welimitourattentiontothreefamiliesoffunctions:
•polynomialfunctions: f1t2 = pn1t2 = antn + g+ a1t + a0,
•exponentialfunctions: f1t2 = Aeat,and
•sineandcosinefunctions: f1t2 = Acosbt + Bsinbt.
Fortheright-sidefunctionslistedabove,thebestmethodforfindingaparticularsolu-tionisthemethod of undetermined coefficients.Severalexamplesillustratethemethod.
examPle 1 Undetermined coefficients with polynomials Findthegeneralsolu-tionoftheequationy� - 4y = t2 - 3t + 2.
Solution Wefollowthestepsgivenabove.
1. Theassociatedhomogeneousequationisy� - 4y = 0.UsingthemethodsofSection16.2,thecharacteristicpolynomialisr 2 - 4,whichhasrootsr = {2.Therefore,thegeneralsolutionofthehomogeneousequationisy = c1e
2t + c2e-2t.
2. Aparticularsolutionisafunctionyp,which,whenaddedtomultiplesofitsderivatives,equalst2 - 3t + 2.Suchafunctionmustbeapolynomial;infact,itisapolynomialofdegreetwoorless.Therefore,weuseatrialsolutionoftheformyp = At2 + Bt + C,whereA,B,andCarecalledundetermined coefficientsthatmustbefound.Wenowsubstitutethetrialsolutionintotheleftsideofthedifferentialequation:
yp� - 4yp = 1At2 + Bt + C2� - 41At2 + Bt + C2 Substitute.
2A
= 2A - 4At2 - 4Bt - 4C Differentiate.
= -4At2 - 4Bt + 2A - 4C. Collectterms.
¯˚˚˘˚˚˙
Equatingtherightandleftsidesofthedifferentialequationgivestheequation
-4At2 - 4Bt + 2A - 4C = t2 - 3t + 2.
Inorderforthisequationtoholdforallt,thecoefficientsoft2,t,and1onbothsidesoftheequationmustbeequal.Equatingcoefficients,wefindthefollowingconditionsforA, B,andC.
t2: -4A = 1
t: -4B = -3
1:2A - 4C = 2
Thesolutionofthissetofequationsisfoundtobe
A = -1
4,B =
3
4,andC = -
5
8.
3. Wenowassemblethegeneralsolutionofthenonhomogeneousequation;itis
y = c1e2t + c2e
-2t -1
4t2 +
3
4t -
5
8.
particular solution
Related Exercises 9–12
➤
Quick check 1 Whattrialsolutionisusedtofindtheparticularsolutionoftheequationy� - 2y = 3t + 1?
➤
¯˚˘˚˙¯˚˚˚˘˚˚˚˙
solutionofthehomogeneous
equation
M16_BRIG9324_01_SE_M16_03 pp2.indd 1197 19/07/12 10:46 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1198 Chapter 16 • Second-Order Differential Equations
Thiscalculationresultsintheequation10Ae3t - 2Be-t = 6e3t - e-t,whichholdsforalltonlyifcoefficientsofliketermsonbothsidesoftheequationareequal.
e3t: 10A = 6
e-t:-2B = -1
Inthiscase,weseethatA =3
5andB =
1
2.
3. Thegeneralsolutionofthenonhomogeneousequationnowfollows:
y = c1et + c2e
-2t +3
5e3t +
1
2e-t.
Related Exercises 13–16
➤
examPle 3 Undetermined coefficients with sines and cosines Solvetheinitialvalueproblemy� + 16y = 15sint,y102 = 1,y�102 = 1.
Solution
1. Thehomogeneousequationy� + 16y = 0hasthecharacteristicpolynomialr 2 + 16,whichhasrootsr = {4i.Therefore,thegeneralsolutionofthehomogeneousequa-tionisy = c1sin4t + c2cos4t.
2. Basedontheformoftheright-sidefunction,alikelytrialsolutionfortheparticularsolutionisyp = Asint + Bcost,wherethevaluesofAandBmustbedetermined.Substitutingthetrialsolutionintothedifferentialequationgives
¯˚˚˘˚˚˙ ¯˚˚˘˚˚˙yp� + yp� - 2yp = 1Ae3t + Be-t2� + 1Ae3t + Be-t2� - 21Ae3t + Be-t2 Substitute.
9Ae3t + Be-t 3Ae3t - Be-t
= 9Ae3t + Be-t + 13Ae3t - Be-t2 - 21Ae3t + Be-t2 Differentiate.
= e3t19A + 3A - 2A2 + e-t1B - B - 2B2 Collectterms.
= 10Ae3t - 2Be-t Simplify.
= 6e3t - e-t. Equalsrightside
Quick check 2 Whattrialsolutionshouldbeusedtofindtheparticularsolutionoftheequationy� - 2y = 4e-5t?
➤
yp� + 16yp = 1Asint + Bcost2� + 161Asint + Bcost2 Substitute.
-Asint - Bcost
= -Asint - Bcost + 161Asint + Bcost2 Differentiate.
= 15Asint + 15Bcost Collectterms.
= 15sint. Equals f1t2.
¯˚˚˚˘˚˚˚˙
Thecondition15Asint + 15Bcost = 15sint,whichmustholdforallt,issatis-fiedprovidedA = 1andB = 0.
3. Itfollowsthatthegeneralsolutionofthenonhomogeneousequationis
y = c1sin4t + c2cos4t + sint.
examPle 2 Undetermined coefficients with exponentials Findthegeneralsolu-tionoftheequationy� + y� - 2y = 6e3t - e-t.
Solution Again,wefollowthestepsgivenabove.
1. Thehomogeneousequationy� + y� - 2y = 0hasthecharacteristicpolynomialr 2 + r - 2,whoserootsarer = 1andr = -2.Therefore,thegeneralsolutionofthehomogeneousequationisy = c1e
t + c2e-2t.
2. Tofindaparticularsolution,wereasonmuchaswedidinExample1.Aparticularsolutionypandmultiplesofitsderivativesmustaddupto6e3t - e-t.Atrialsolutioninthiscaseisyp = Ae3t + Be-t,whereAandBmustbefound.Wenowsubstitutethetrialsolutionintothedifferentialequation:
M16_BRIG9324_01_SE_M16_03 pp2.indd 1198 19/07/12 10:46 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.3 LinearNonhomogeneousEquations 1199
4. Inthisexample,wearegiveninitialconditions,whichareusedtodeterminethecon-stantsc1andc2.Firstnoticethaty�1t2 = 4c1cos4t - 4c2sin4t + cost.Theinitialconditionsnowimplythat
y102 = c2 = 1andy�102 = 4c1 + 1 = 1,orc1 = 0.
Therefore,thesolutionoftheinitialvalueproblemis
y = cos4t + sint.
Thesolutionoftheinitialvalueproblem(redcurveinFigure16.13)isinstructive.Itcontainsonetermfromthesolutionofthehomogeneousequation,representingthenatu-ralresponseofthesystem,andonetermfromtheparticularsolution,representingtheeffectoftheexternalforce.Theresultingresponseisahigh-frequencywavey = cos4tsuperimposedonalow-frequencywavey = sint(dashedcurveinFigure16.13).
Thecalculationthatledtothesolutionalsohasausefullesson.Thetrialsolutionhasaterm1Bcost2thatdoesnotappearintheparticularsolution.Themethodofundeterminedcoefficientswillalwaysreturnavalueofzeroforthecoefficientofanunnecessaryterm.Soitisbettertoerronthesideofincludingtoomanytermsinthetrialsolution. Related Exercises 17–20
➤
yp � sin t
y � cos 4t � sin t
t
2
1
0
�2
�1
y
�4�2
Figure 16.13
Quick check 3 Whattrialsolutionshouldbeusedtofindtheparticularsolutionoftheequationy� - 2y = cos5t - 3sin5t?
➤
example 4 Undeterminedcoefficientswithcombinedfunctions Findthegeneralsolutionoftheequation
y� + 6y� + 25y = 29e-tsint.
Solution
1. Thecharacteristicpolynomialofthehomogeneousequationisr 2 + 6r + 25 = 0,whoserootsarer = -3 { 4i.Therefore,thegeneralsolutionofthehomogeneousequationis
y = c1e-3tsin4t + c2e
-3tcos4t.
2. Tofindaparticularsolution,wesurmisethatatermoftheformeatsinbtoreatcosbtontherightsideoftheequationrequiresatrialsolutionoftheformyp = Aeatsinbt + Beatcosbt.Forthisparticularproblem,weleta = -1andb = 1.Differentiatingandcollectingterms,wefindthat
yp� = -1A + B2e-tsint + 1A - B2e-tcostand
yp� = 2Be-tsint - 2Ae-tcost.
Whenthederivativesaresubstitutedintothedifferentialequationandsimplificationsaremade,theresultistheequation
119A - 4B2e-tsint + 14A + 19B2e-tcost = 29e-tsint.
Wenowequatecoefficientsofe-tsintande-tcostonbothsidesoftheequationtogivetheconditionsonAandB:
19A - 4B = 29
4A + 19B = 0.
AshortcalculationgivesthevaluesA =19
13andB = -
4
13.
Therefore,aparticularsolutionis
yp =19
13e-tsint -
4
13e-tcost.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1199 23/07/12 11:04 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1200 Chapter 16 • Second-Order Differential Equations
3. Combiningthesolutionofthehomogeneousequationandtheparticularsolution,thegeneralsolutionoftheequationis
y = c1e-3tsin4t + c2e
-3tcos4t +19
13e-tsint -
4
13e-tcost.
Takingc1 = c2 = 0,weseethattheparticularsolution(Figure16.14)isarapidlydampedwave.
Quick check 4 Whattrialsolu-tionshouldbeusedtofindtheparticularsolutionoftheequationy� - 2y = 13e-2tcos7t?
➤
y � e�t sin t � e�t cos t
� t
1
0
�1
y
1913
413
Figure 16.14 Related Exercises 21–28
➤
Thefourprecedingexamplesdemonstratehowthemethodofundeterminedcoeffi-cientsworks.Bynow,youprobablyrealizethatifyouchooseanappropriatetrialsolution,thenthemethodeventuallyproducesaparticularsolutionofanequation,althoughsomepersistencemaybeneeded.Therefore,thecruxofthemethodischoosingagoodtrialsolu-tion.Table16.2liststhetrialsolutionsneededforcommonlyoccurringright-sidefunctions.Inthistable,lowercaselettersrepresentcoefficientsarethataregiven,uppercaselettersareundeterminedcoefficientsthatmustbefound,andpnisannth-degreepolynomial
pn1t2 = antn+ g+ a1t + a0,wherean � 0.
table 16.2 trial Solutions—almost always
right-side function f includes …
trial solution
pn1t2 Antn + g+ A1t + A0
eat Aeat
sinbtorcosbt Asinbt + Bcosbtpn1t2eat 1Ant
n+ g+ A1t + A02eat
pn1t2sinbtorpn1t2cosbt 1Antn + g+ A1t + A02sinbt + 1Bnt
n + g+ B1t + B02cosbteatsinbtoreatcosbt Aeatsinbt + Beatcosbt
Ifaright-sidefunctionisasumoftwoormorefunctions(say, f = f1 + f2),aparticu-larsolutionmustbefoundforeachfunctioninthesum.Thentheparticularsolutionforfisthesumoftheparticularsolutionsfor f1and f2(Exercise51).
The ExceptionsThetrialsolutionsinTable16.2almostalwayswork;however,thereareafewexceptions.Iftheexceptionswereinsignificant,theymightbeoverlooked.Asweshowinthenextsection,theexceptionscorrespondtoanimportantphysicalphenomenon,soit’snecessarytoinvestigatethesespecialcases.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1200 19/07/12 10:47 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.3 LinearNonhomogeneousEquations 1201
Tofindthegeneralsolutionoftheequation
y� + 9y = 4sin3t,
weproceedasinpreviousexamples.Thecharacteristicpolynomialofthehomogeneousequationisr2 + 9,whichhasrootsr = {3i.Therefore,thegeneralsolutionoftheho-mogeneousequationis
y = c1sin3t + c2cos3t.
Tofindtheparticularsolution,wefollowTable16.2andusethetrialsolutionyp = Asin3t + Bcos3t.Substitutingthissolutionintothedifferentialequationleadsto
yp� + 9yp = 1Asin3t + Bcos3t2� + 91Asin3t + Bcos3t2 Substitute.
-9Asin3t - 9Bcos3t
= -9Asin3t - 9Bcos3t + 9Asin3t + 9Bcos3t Differentiate.
= 1-9A + 9A2sin3t + 1-9B + 9B2cos3t Simplify.
0 0
� 4sin3t,forallt.
¯˚˚˚˚˘˚˚˚˚˙
¯˚˚˘˚˚˙ ¯˚˚˘˚˚˙
Ordinarily,atthisstageofthecalculation,wewouldmatchcoefficientsofsin3tandcos3tonbothsidesoftheequation,andsolveforAandB.However,inthiscase,wefindthatyp� + 9yp = 0,whichmeansthetrialsolutionfailed.Thefailureoccurredbecauseasolutionofthehomogeneousequationappearsontherightsideoftheequation.
Beforeexplainingtheremedyforthisspecialcase,let’sseewhatitmeansphysically.Recallthatsolutionsofthehomogeneousequationrepresentthenaturalresponseofthesystemintheabsenceofexternalforces.Whenanexternalforceisappliedtoasystemthatmatchesthenaturalresponseofthesystem,somethingunusualhappens.Aswedis-cussinthenextsection,thisoccurrenceiscalledresonance.
Whenasolutionofthehomogeneousequationappearsontherightsideoftheequa-tion,thetrialsolutionmustbeadjustedslightly.Theadjustedtrialsolutionisthetrialsolu-tiongiveninTable16.2multipliedbyts,wheres = 1ors = 2ischosentoensurethatnoterminthetrialsolutionisasolutionofthehomogeneousequation(Exercise52).
Table16.2mayberevisedandpresentedconciselyasfollows.
Summary Trial Solutions for y� � py� � qy � f
Tofindtheparticularsolutionoftheequation
y� + py� + qy = pn1t2eat # e sinbt
cosbt
usethetrialsolutiongiveninTable16.2multipliedbyts,wheresisthesmallestnonnegativeintegerthatensuresthatnotermofypisahomogeneoussolution.
examPle 5 Special cases Findthegeneralsolutionoftheequation
y� + 9y = 4sin3t.
Solution Wenoticethattheright-sidefunction4sin3tisasolutionofthehomoge-neousequation.Therefore,wemodifythestandardtrialsolutionyp = Asin3t + Bcos3tandinsteaduse
yp = Atsin3t + Btcos3t.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1201 19/07/12 10:47 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1202 Chapter 16 • Second-Order Differential Equations
Quick check 5 Whattrialsolutionshouldbeusedtofindtheparticularsolutionoftheequationy� - 4y = 6e2t?
➤
¯˚˚˚˚˚˚˚˚˚˚˚˚˘˚˚˚˚˚˚˚˚˚˚˚˚˙
¯˚˚˘˚˚˙ ¯˚˚˘˚˚˙
yp� + 9yp = 1Atsin3t + Btcos3t2� + 91Atsin3t + Btcos3t2 Substitute.
= A16cos3t - 9tsin3t2 + B1-6sin3t - 9tcos3t2 yp�
+ 9Atsin3t + 9Btcos3t Differentiate.
= -6Bsin3t + 6Acos3t -19A - 9A2tsin3t - 19B - 9B2tcos3t Simplify.
0 0
= -6Bsin3t + 6Acos3t Simplify.
= 4sin3t. Equalsrightside
Noticethecancellationoftermsleavesuswithalinearcombinationofsin3tandcos3t.Wenowusetheequation-6Bsin3t + 6Acos3t = 4sin3tandmatchcoefficientsof
sin3tandcos3t.WeconcludethatA = 0andB = -2
3.Therefore,theparticularsolution
isyp = -2
3tcos3t,andthegeneralsolutionoftheequationis
y = c1sin3t + c2cos3t -2
3tcos3t.
Figure16.15showstheparticularsolution1c1 = c2 = 02anditssignificantproperty:Becauseofthemultiplicativefactoroftinthesolution,theamplitudeofthisoscillationin-creaseslinearlywitht.Thesolutioniswrappedinanenvelopeformedbytwolineswithslopes{2
3.
t
2
1
0
�2
�1
y
�2�
y � ��t cos 3t23
Figure 16.15 Related Exercises 29–34
➤
Substitutingintothedifferentialequation,weseethat
Inclosing,wementiononeremainingcasethathasn’tbeendiscussed.Considertheequationy� + 4y� + 4y = 3e-2t.Youcancheckthatthecharacteristicpolynomialforthehomogeneousequationisr 2 + 4r + 4 = 1r + 222.Therefore,thecharacteristicpolynomialhastherepeatedrootr = -2andthesolutionofthehomogeneousequation(bySection16.2)isy = c1e
-2t + c2te-2t.Nowwhenwelookforaparticularsolution,
weseethatasolutionofthehomogeneousequationappearsontherightsideoftheequa-tion.Thetrialsolutioncannotbeyp = Ae-2toryp = Ate-2t,becausebothofthesefunc-tionsaresolutionsofthehomogeneousequation.Inthiscase,thecorrecttrialsolutionisyp = At2e-2t.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1202 20/07/12 10:59 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.3 LinearNonhomogeneousEquations 1203
Section 16.3 exerciSeSReview Questions1. Explainhowtofindthegeneralsolutionofthenonhomogeneous
equationy� + py� + qy = f1t2,wherepandqareconstants.
2. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� + py� + qy = t3 - t + 1,wherepandqareconstants?
3. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 8y = 2e-4t?
4. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 2y = 2sin3t?
5. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 2y = 6e-tcos4t?
6. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 2y = 1 + t + cos3t?
7. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 4y = t2e-t?
8. Whattrialsolutionwouldyouusetofindaparticularsolutionoftheequationy� - 4y� + 4y = 6e2t?
Basic Skills9–12. Undetermined coefficients with polynomialsFind a particular solution of the following equations.
9. y� - 9y = 2t + 1
10. y� - 2y� - 15y = 3t3 - 2t - 4
11. y� + 3y� - 18y = 2t4 - t2
12. y� + 5y = 6t3 - t2
13–16. Undetermined coefficients with exponentialsFind a particular solution of the following equations.
13. y� - y = e-2t
14. y� + 3y = 5e-3t
15. y� - 4y� - 32y = 6e-3t
16. y� + 2y� - 8y = e-t - 2et
17–20. Undetermined coefficients with sines/cosinesFind a particular solution of the following equations.
17. y� - y = 3sin2t
18. y� + 4y = 5cos3t
19. y� - y� - 6y = sint + 3cost
20. y� - 3y� - 4y = 2cos2t - 3sin2t
21–28. Undetermined coefficients with combined functionsFind a particular solution of the following equations.
21. y� - 4y = 2et - 1
22. y� + y = cos2t + t3
23. y� + y� - 12y = 2te-t
24. y� + 4y = e-tcost
25. y� + 16y = tcos2t
26. y� - 9y = 1t2 + 12e-t
27. y� - y� - 2y = t1cost - sint228. y� + 2y� - 4y = t2cost
29–34. Undetermined coefficients with special casesFind a particu-lar solution of the following equations.
29. y� - y = 3et
30. y� + y = 3cost
31. y� + y� - 6y = 4e-3t
32. y� + 4y = cos2t
33. y� + 5y� + 6y = 2e-2t
34. y� + 2y� + y = 4e-t
Further Explorations35. Explain why or why notDeterminewhetherthefollowingstate-
mentsaretrueandgiveanexplanationorcounterexample.
a. Tofindaparticularsolutionoftheequationy� - 4y = t3,youshouldusethetrialsolutionyp = At3.
b. Tofindaparticularsolutionoftheequationy� + y� - 6y = sint,youshouldusethetrialsolutionyp = Asint.
c. Tofindaparticularsolutionoftheequationy� + 10y� + 25y = e5t,youshouldusethetrialsolutionyp = Ae5t.
36–41. Initial value problemsFind the general solution of the follow-ing equations and then solve the given initial value problem.
36. y� - 9y = 2e-t,y102 = 0,y�102 = 0
37. y� + y = 4sin2t,y102 = 1,y�102 = 0
38. y� + 3y� + 2y = 2e-3t,y102 = 0,y�102 = 1
39. y� + 4y� + 5y = 12,y102 = 1,y�102 = -1
40. y� - y = 2e-tsint,y102 = 4,y�102 = 0
41. y� + 9y = 6cos3t,y102 = 0,y�102 = 0
42–45. Longer calculationsFind a particular solution of the following equations.
42. y� + 2y� + 2y = 5e-2tcost
43. y� + y� - y = 3t4 - 3t3 + t
44. y� + 2y� + 5y = 8e-tcos2t
45. y� - y = 25te-tsin3t
46–49. Higher-order equationsThe method of undetermined coeffi-cients extends naturally to higher-order constant coefficient equations. Find a particular solution of the following equations.
46. y� - y� = 8t3 47. y� - 8y = 7et
M16_BRIG9324_01_SE_M16_03 pp2.indd 1203 19/07/12 10:47 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1204 Chapter 16 • Second-Order Differential Equations
48. y 142 - y = 5sin2t
49. y 142 - 3y� + 2y = 6te2t
ApplicationsApplications of Sections 16.2 and 16.3 are considered in Section 16.4.
50. Looking ahead: beatsOneoftheapplicationsconsideredinSection16.4resultsintheinitialvalueproblem
y� + v02y = acosvt,y102 = 0,y�102 = 0,
wherea,v,andv0arepositiverealnumbers.
a. Assumethatv � v0andfindthegeneralsolutionofthisequation.
b. Solvetheinitialvalueproblemandshowthatthesolutionis
y =a
v02 - v21cosvt - cosv0t2.
c. Thecaseinwhichvandv0arenearlyequalisofinterest.Letv = 5andv0 = 6andgraphthesolutionon30,6p4.Describethesolutionyousee.
d. Inordertoidentifythefrequenciesinthesolution,usetheidentity
cosvt - cosv0t = 2sin1v0 - v2t
2sin
1v0 + v2t
2
torewritethesolutionintermsofaproductoftwosinefunctions.
e. Nowinterpretthegraphofpart(c)andidentifythetwofre-quenciesinthesolution.
Additional Exercises51. Sum of particular solutionsShowthataparticularsolutionof
theequationy� + py� + qy = f1t2 + g1t2isyp1 + yp2,whereyp1isaparticularsolutionofy� + py� + qy = f1t2andyp2isaparticularsolutionofy� + py� + qy = g1t2.
T
52. Variation of parametersFindingaparticularsolutionwhenaho-mogeneoussolutionappearsintheright-sidefunctionishandledusingamethodcalledvariation of parameters.(Thismethodisalsousedtofindparticularsolutionsofequationsthatcannotbehandledbyundeterminedcoefficients.)Thefollowingstepsshowhowvariationofparametersisusedtofindtheparticularsolutionofonespecificequation.
a. Considertheequationy� - y = et.Showthatthehomoge-neoussolutionsarey1 = etandy2 = e-t.Notethattheright-sidefunctionisahomogeneoussolution.
b. Assumeaparticularsolutionhastheform
yp1t2 = u11t2y11t2 + u21t2y21t2 = u11t2et + u21t2e-t,
wherethefunctionsu1andu2aretobedetermined.Computeyp�andimposetheconditionu1�et + u2�e-t = 0toshowthatyp� = u1e
t - u2e-t.
c. Computeyp�andsubstituteitintothedifferentialequation.Aftercancelingseveralterms,showthattheequationreducestou1�et - u2�e-t = et.
d. Parts(c)and(d)givetwoequationsforu1�andu2�.Eliminate
u2�andshowthattheequationforu1isu1� =1
2.
e. Solvetheequationinpart(d)foru1.
f. Usepart(e)toshowthattheequationforu2isu2� = -1
2e2t.
g. Solvetheequationinpart(f)foru2.h. Nowassembletheparticularsolutionyp1t2 = u11t2et + u21t2e-t
andshowthatyp =1
2tet -
1
4et.
Quick check anSwerS
1. yp = At + B 2. yp = Ae-5t 3. yp = Asin5t + Bcos5t4. yp = Ae-2tsin7t + Be-2tcos7t 5. yp = Ate2t.
➤
16.4 ApplicationsThroughoutthischapter,wehavealludedtothemanyapplicationsofsecond-orderdif-ferentialequations.Wenowhavethetoolsneededtoformulateandsolvesomeofthesecond-orderdifferentialequationsthatariseinpracticalapplications.
Mechanical Oscillator EquationsThetermoscillatorisusedinseveraldifferentways.Itmaybeablockbouncingonaspring,apendulumonagrandfatherclock,awaveonanoscilloscope,oraflowingandebbingtide.Inthissection,weconsiderbothmechanicalandelectricaloscillators,andbecausemechanicaloscillatorsareeasiertovisualize,webeginwiththem.Theimportantfactisthatthedifferentialequationsthatgovernvariousoscillatorsaresimilartoonean-otherinmanyways.
M16_BRIG9324_01_SE_M16_03 pp2.indd 1204 19/07/12 10:47 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1205
Equilibriumposition
y , 0
y . 0
y 5 0
Figure 16.16
¯˘˙ ¯˚˘˚˙ ¯˚˚˘˚˚˙
y � 0, springcompressed Fs � 0
y � 0
y � 0, springstretched Fs � 0
Fs
Equilibriumposition
y � 0
y
Figure 16.17
Theprototypemechanicaloscillatorisablockonaspring.Whetherthespringisorientedverticallyorhorizontally,therelevantdifferentialequationisthesame.ConsiderthesystemshowninFigure16.16inwhichablockofmassmisattachedtoamasslessspringthathangsfromarigidsupport.Whentheblockhangsatrest,thespringispartiallystretchedandthesystemisatequilibrium;wedenotethispositionoftheblocky = 0.Thepositivey-axispointsdownwardinthedirectionofthegravitationalforce;thatis,positivepositionsoftheblockarebelowtheequilibriumposition.
Attimet = 0,theblockmaybepulleddownwardorpushedupwardtoapositiony0,anditmaybegivenaninitialvelocityv0.Therefore,wehaveinitialconditionsoftheformy102 = y0andy�102 = v0.Ouraimistoformulateadifferentialequationthatdescribesthepositiony1t2oftheblockafteritissetinmotionattimet = 0.
Newton’ssecondlawofmotionisusedtodescribethemotionofordinaryobjects.Forone-dimensionalmotion,itsaysthat
mass # acceleration = sumofforces
m a = y� F
ormorebrieflymy� = F,whereFmaydependont,y,andy�.Inthissection,weconsiderthreeforcesthatcouldactontheblock:therestoringforce
ofthespring,damping(orfrictionorresistance),andexternalforces.Let’staketheminorder.
1. Restoringforce:Inmanysituations,theforcethatthespringexertsontheblockiswellmodeledbyHooke’slaw—anexperimentalresultthatapplieswhentheamountofstretchingorcompressionofthespringissmallcomparedtotheoveralllengthofthespring.Supposethattheblockattachedtothespringhaspositiony.AccordingtoHooke’slaw,thespringexertsaforceontheblockthatpullsorpushestheblocktowardtheequi-libriumposition.ThisrestoringforceisgivenbyFs = -ky,wherek 7 0isaconstantdeterminedbythestiffnessofthespring.Figure16.17showshowtointerpretHooke’slaw.Ify 7 0,thenthespringisstretchedandFs 6 0,whichmeanstheforceactsup-ward,pullingtheblocktowardtheequilibriumposition.Ify 6 0,thenthespringiscom-pressedandFs 7 0,whichmeanstheforceactsdownward,pushingtheblocktowardtheequilibriumposition.Ineithercase,thespringworksto“restore”theequilibrium.
➤ Youmaywonderwhythegravitationalforceisnotincludedintheequationofmotion.Theshortansweristhatthegravitationalforceactingontheblockismg,whichistheweightoftheblock.Whentheblockhangsstaticallyonthespring,thisforcestretchesthespringtowhatwehavecalledtheequilibriumposition1y = 02.Bymeasuringthepositionoftheblockrelativetothisequilibriumposition,thegravitationalforceiseffectivelyincludedintheequationofmotion.SeeExercise42forthedetailedanalysis.Theequationofmotionforahorizontalspring-blocksystemisidenticaltotheequationderivedhere(Exercises43–46).
2. Dampingforce:Resistancetothemovementoftheblockcanoccurinmanyways.Themediuminwhichtheblockmoves(perhapsairoroil)mayacttoresistmotion.Insomeexperiments,resistancemaybeprovidedbyadashpot(apistonandcylinder)at-tachedtotheblock.Inallthesecases,thedampingforceactsinthedirectionoppositethatofthemotion.Acommonassumptionisthatthedampingforceisproportionaltothevelocityy�.Therefore,weassumethisforcehastheformFd = -cy�,wherec 7 0measuresthestrengthoftheresistance.
➤ Therearemanywaystomodelresistancetomotion.AnothercommonassumptionisthatFd = -c1y�22,whichleadstoanonlinearequationofmotion.
M16_BRIG9324_01_SE_M16_04 pp2.indd 1205 20/07/12 1:07 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1206 Chapter 16 • Second-Order Differential Equations
3. Externalforces:Dependingonthesystembeingmodeled,externalforcesFextmayariseinvariousways.Forexample,inaverticallysuspendedspring-blocksystem,thesupportofthespringmaymove,perhapsperiodicallywithaspecifiedamplitudeandfrequency.Whereastherestoringforcedependsonyandthedampingforcedependsony�,theexternalforceisconstantordependsonlyont.
Withthesethreeforces,Newton’ssecondlawtakestheform
my� = Fs + Fd + Fext = -ky - cy� + Fext.
Eachterminthisequationhasunitsofforce,whichweassumeismeasuredinnew-tons11N = 1kgm>s22.Therefore,theunitsofkareN>morkg>s2,andtheunitsofcarekg>s.Dividingthroughtheequationbymandrearrangingtermsresultsinafamiliarsecond-orderconstant-coefficientequation,
y� +cm
y� +km
y =Fext1t2
mory� + by� + v0
2y = f1t2,
b v02 f
whereb =cm
andv02 =
km
.
Intheremainderofthissection,welookatseveralversionsofthisequation.Thefol-lowingterminologyhelpsorganizethesedifferentcases.
•Ifthedampingforceiszero1c = b = 02,themotionissaidtobeundamped.Otherwise,themotionisdamped.
•Ifnoexternalforcesarepresent1Fext = f = 02,thesystemhasfreeoscillations.Oth-erwise,theresponseconsistsofforcedoscillations.
Withthisoneequationofmotion,therearefourdifferentcategoriesofmotion,eachofwhichweinvestigate.
Free Undamped OscillationsWenowexaminesomeofthebehaviorthatisdescribedbythegeneraloscillatorequation
y� + by� + v02y = f1t2.
Theeasiestplacetobeginiswithfree1f1t2 = 02andundamped1b = 02motion.Thisistheidealizedcaseofablockthatisgivenaninitialdisplacementand/orvelocity(asspecifiedbytheinitialconditions)andthenallowedtooscillateinthepresenceoftherestoringforceonly.Theequationofmotionissimply
y� + v02y = 0,wherev0
2 =km
.
EquationsofthissortweresolvedinSection16.2.Thecharacteristicpolynomialisr 2 + v0
2,whichhasrootsr = { iv0.Thegeneralsolutionis
y = c1sinv0t + c2cosv0t.
Weseethatv0playstheroleofanangularfrequency;inthissetting,itisthenaturalfrequencyoftheoscillator.Thesolutiondescribesawavewithconstantamplitudeandaperiodof2p>v0;itisalsoanexampleofsimpleharmonicmotion.Recallthatasolu-tionoftheformy = c1sinv0t + c2cosv0tmayalwaysbeexpressedinamplitude-phaseformy = Asin1v0t + w2.
➤ Youcancheckthattheunitsofv0ares-1,whicharetheunitsoffrequency.Forexample,v0 = 3means3oscillationsper2ptimeunits,or3>12p2oscillationspertimeunit.Iftheangularfrequencyisv0,thentheperiodis2p>v0s.
➤ SeeSection16.2forareviewoftheamplitude–phaseformofasolution.Inthiscase,
A = 2c12 + c2
2andtanw =c2
c1.
Quick check 2 Considerthefunctiony = 2sin4.5t.Whatistheperiodoftheoscillationdescribedbythefunction?Howmanyoscillationsdoesthegraphhaveevery2ptimeunits?Howmanyoscillationsdoesthegraphhaveeverytimeunit?
➤
Quick check 1 Usethetermsdamped/undampedandfree/forcedtocategorizethesystemsdescribedbythefollowingequations.(a)y� + 0.5y� + 4.3y = 0,(b)y� + 9.2y = sin3t.
➤
¯˘˙ ¯˘˙ ¯˘˙
M16_BRIG9324_01_SE_M16_04 pp2.indd 1206 23/07/12 11:14 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1207
example 1 Freeundampedoscillations Supposeablockwithmass0.5kgisat-tachedtoaspring,andthespringstretches0.5mtobringthesystemtoequilibrium.Theblockisthenpulleddownanadditional0.25mfromitsequilibriumpositionandreleasedwithandownwardvelocityof0.1m>s.Findthepositionoftheblock,fort Ú 0.
Solution Thefirststepistodeterminethespringconstantk.Recallthattheaccelerationduetogravityisg = 9.8m>s2.Whentheblockisattachedtothespring,itproducesaforce(equaltoitsweight)ofmg = 10.5kg2 # 19.8m>s22 = 4.9Nonthespring.ByHooke’slaw,thisforceequalsky,wherey = 0.5misthedistancethespringisstretchedbytheforce.Therefore,thespringconstantsatisfies0.5k = 4.9,whichimpliesthatk = 9.8.N>m.It
followsthatthenaturalfrequencyoftheoscillatorisv0 = A km
= A9.8
0.5� 4.43s-1,
whichcorrespondstoaperiodof2p>4.43 � 1.42s.Theequationofmotionhasthegeneralsolution
y = c1sinv0t + c2cosv0t.
Wenowusetheinitialconditionstoevaluatec1andc2.Notingthat
y� = c1v0cosv0t - c2v0sinv0t
andusingv0 = 4.43,wefindthat
y102 = c2 = 0.25andy�102 = c1v0 = 0.1orc1 =0.1v0
� 0.023.
Therefore,thesolutionoftheinitialvalueproblemis
y = 0.023sin4.43t + 0.25cos4.43t.
Thesolutionmayalsobeexpressedinamplitude-phaseformas
y = 0.251sin14.43t + 1.482.
Whenthesolutioniswritteninthisform,itisclearthattheblockoscillateswithaconstantamplitudeofapproximately0.25foralltime(Figure16.18a).Withoutdamping,thereisnolossofenergyinthesystem,whichisanidealizedcase.
y � 0.023 sin 4.43t � 0.25 cos 4.43t(y(0), y�(0))
�0.5 y0.5 1.01 �1.0
0.5
1.0
�0.5
�1.0
y�
(b)(a)
t
0.5
0
�0.5
y
2 3
Figure 16.18
Thephase-planegraphofthesolution(Figure16.18b)showsclearlythattheamplitudeoftheoscillationvariesbetweenapproximately{0.25,whilethevelocityvariesbetweenapproximately{1.1.Theclosedcurveinthephaseplaneindicatesthatthesolutionisperiodicwithnochangeintheamplitudeovertime. RelatedExercises7–12
➤
➤ Althoughapproximationsmayhavebeenmadeincomputingcoefficientsofequations,wewilluseequalitysignswhenwritingequationsandsolutions.
M16_BRIG9324_01_SE_M16_04 pp2.indd 1207 20/07/12 1:07 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1208 Chapter 16 • Second-Order Differential Equations
Forced Undamped Oscillations: BeatsWhenanexternalforceisincludedwithundampedoscillations,someremarkablenewef-fectsappear.WelimitourattentiontoexternalforcesoftheformFext = F0cosvt,wheretheamplitudeF0andthefrequencyvoftheforcearespecified.Theresultingnonhomoge-neousdifferentialequationis
y� + v02y =
F0
mcosvt.
EquationsofthissortwereconsideredinSection16.3.Asbefore,thesolutionofthehomogeneousequationis
y = c1sinv0t + c2cosv0t.
Usingundeterminedcoefficientswiththeassumptionthatv � v0,theparticularso-lution(Exercise38)is
yp =F0
m1v02 - v22cosvt.
Therefore,thegeneralsolutionfortheforcedundampedoscillatoris
y = c1sinv0t + c2cosv0t +F0
m1v02 - v22cosvt.
Toisolatetheeffectoftheexternalforce,weconsidertheinitialconditionsy102=
y�102 = 0,whichimpliesthatc1 = 0andc2 = -F0
m1v02 - v22.Thesolutionoftheinitial
valueproblembecomes
y =F0
m1v02 - v22 1cosvt - cosv0t2,
whichisthesumoftwooscillatoryfunctionswithdifferentfrequencies.Thesolutioniseasiertovisualizewhenwrittenusingatrigonometricidentityas
(Exercise39)
y =2F0
m1v02 - v22sin
1v0 - v2t
2sin
1v0 + v2t
2.
low-frequency wave
Thisfunctionisstrikingwhenv � v0.Inthiscase,2F0
m1v20 - v22 sin
1v0 - v2t
2isa
low-frequencywavewithamplitude2F0
m1v20 - v22anda(large)periodof
2p
1v0 - v2>2,
whilesin1v0 + v2t
2isahigh-frequencywavewithamplitude1anda(small)periodof
2p
1v0 + v2>2.Whenthesetermsappearinaproduct,theresultisahigh-frequencycarrier
waveenclosedbylow-frequencyenvelopewaves(Figure16.19),aphenomenonknownasbeats.Theeffectcanbeheardwhentwotuningforkswithnearlyequalfrequenciesarestruckatthesametime.Whenthephenomenonoccursinelectricalcircuits,itiscalledamplitudemodulation.
➤ RecallthatwedividedthroughNewton’ssecondlawbythemasstoproduceanequationintermsofacceleration.Therefore,theexternalforcemustalsobedividedbym.
Quick check 3 IfthewaveinFigure16.19wereasoundwave(perhapsgeneratedbytwotuningforks),atwhattimeswouldthesoundbeloudest?
➤
Beats: 0 � 12, � 10
t
y
�3�2�
� �
Envelope CarrierWave
Figure 16.19
¯˚˚˚˚˚˘˚˚˚˚˚˙ ¯˚˚˘˚˚˙
high-frequencywave
M16_BRIG9324_01_SE_M16_04 pp2.indd 1208 23/07/12 11:15 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1209
example 2 Forcedundampedoscillations Supposethespring-blocksysteminExample1isattachedtoadevicethatmovesthesupportupanddownvertically,impart-ingtothesystemaforcegivenbyFext = cosvt.Determinethepositiony1t2oftheblock,fort Ú 0,withforcingfrequenciesv = 4andv = 1,assumingy102 = y�102 = 0.
Solution FromExample1,weknowthatm = 0.5kg,whichimplies2F0
m= 4;the
naturalfrequencyisv0 � 4.43s-1.Therefore,thesolutionoftheinitialvalueproblemisapproximately
y =4
19.6 - v2sin14.43 - v2t
2sin
14.43 + v2t
2.
v02
ThesolutionsareshowninFigure16.20withv = 4andv = 1.Inthefirstcase,thenaturalfrequencyisnearlyequaltotheforcingfrequencyandweseeapatternofbeats.Bycontrast,whenthetwofrequenciesdiffersignificantly,theresultingsolutionisalessorganizedsuperpositionoftwowaves.Noticethatbeatsproduceareinforcementofthetwocomponentwavesandtheamplitudeoftheoscillationisgreaterwithbeats.
(a)
1
0
�1
� 4, 0 � 4.43
t
y
(b)
0.2
0
�0.2
t
y
�8�2�2 �4�4 �6�6 �
�� � 1, 0 � 4.43��
8
Figure 16.20 RelatedExercises13–16
➤
Forced Undamped Oscillations: ResonanceTheotherinterestingsituationthatariseswithforcedundampedoscillationsoccurswhenv = v0;inthiscase,thefrequencyoftheexternalforceexactlymatchesthenaturalfre-quency.Thedifferentialequationbecomes
y� + v02y =
F0
mcosv0t.
WenowhavethespecialcasediscussedinSection16.3inwhichahomogeneousso-lutionappearsontherightsideoftheequation.Recallthattofindaparticularsolutioninthiscase,weuseatrialsolutionoftheformyp = Atsinv0t + Btcosv0t.Carryingoutafamiliarcalculationwithundeterminedcoefficients,wefindtheparticularsolution
yp =F0
2mv0tsinv0t.
Therefore,thegeneralsolutionoftheequationis
y = c1sinv0t + c2cosv0t +F0
2mv0tsinv0t.
➤ ThecatastrophiccollapseoftheTacomaNarrowsBridgein1940isoftenattributedtoaresonancesetupwhenthefrequencyofwindgustsmatchedthenaturalfrequencyofthebridge.Carefulanalysissuggeststhatthecausesofthecollapseweremorecomplexandprobablyinvolvedaerodynamiceffects.SeeYouTube!
¯˘˙
M16_BRIG9324_01_SE_M16_04 pp2.indd 1209 20/07/12 1:07 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1210 Chapter 16 • Second-Order Differential Equations
Free Damped OscillationsTrulyundampedoscillationsdonotoccurinmostphysicalsystemsbecausefrictionorresistanceisalwayspresentinsomeform.Wenowturntomorerealisticoscillatorsinwhichsometypeofdampingispresent.Withnoexternalforces,thegoverningequationis
y� + by� + v02y = 0,
whereb =cm
7 0measuresthestrengthofthedampingandv0 = A km
isthenatural
frequency.Thecharacteristicpolynomialforthisequationisr2 + br + v02,whichhas
roots
r =-b { 2b2 - 4v0
2
2.
Thecriticalfeatureofthissolutionisthetermtsinv0t,whichisanoscillatoryfunc-tionwithanincreasingamplitude(Figure16.21).Thistermleadstoaphenomenon,knownasresonance,whichcannotpersistinactualphysicalsystems.Inarealisticsystem,eithertheintegrityofthesystemisaltered(forexample,ashockabsorberfailsorabridgecol-lapses)ordampingeventuallylimitsthegrowthoftheoscillations.
RelatedExercises13–16
➤
example 3 Forcedundampedoscillations Supposethespring-blocksysteminExample1isattachedtoadevicethatmovesthesupport,impartingtothesystemaforcegivenbyFext = cosvt,wherev = v0 = 4.43isthenaturalfrequencyofthesystem.Determinethepositiony1t2oftheblock,fort Ú 0,assumingy102 = y�102 = 0.
Solution WithF0 = 1,m = 0.5,andv0 = 4.43,thegeneralsolutionbecomes
y = c1sin4.43t + c2cos4.43t + 0.23tsin4.43t.
Imposingtheinitialconditions,ashortcalculationshowsthatc1 = c2 = 0.There-fore,thesolutionoftheinitialvalueproblemis
y = 0.23tsin4.43t.
Thesolution(Figure16.22a)displaystheincreasingamplitudeassociatedwithreso-nance.Theoutwardspiralofthephase-planegraphofthesolution(Figure16.22b)alsogivesavividpictureoftheamplitudegrowth.
t
y
y � t sin 0 tF0
2m 0��
Figure 16.21
y � 0.23t sin 4.43t
�1 y1 2�2
1
2
�1
�2
y�
(a) (b)
1
0
�1
t
y
� �2
Figure 16.22 RelatedExercises13-16
➤
M16_BRIG9324_01_SE_M16_04 pp2.indd 1210 20/07/12 1:07 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1211
Quick check 4 Evaluate limtS�
Ate-at
witha 7 0.Inthecaseofcriticaldamping,dosolutionsalwaysdecayastincreases?
➤
Thisproblemisintriguingbecausethreecasesarisedependingontherelativesizesofb(damping)andv0(restoringforce).
1. Ifb2 7 4v02, thedampingforce isdominant,andtherootsr1andr2arerealand
distinct.Furthermore,noticethatbecauseb 7 0and2b2 - 4v02 6 b,bothrootsare
negative.Therefore,weexpectexponentiallydecayingsolutionsoftheform
y = c1er1t + c2e
r2t,withr1 6 0andr2 6 0.
Inthissituation,oftencalledoverdamping,thedampingisstrongenoughtosuppressoscillations.
2. Ifb2 = 4v02,thenthecharacteristicpolynomialhasadoublerootr1 = -
b
2.Wenow
havesolutionsoftheform
y = c1er1t + c2te
r1t,withr1 6 0.
Inthiscase,thesystem“attempts”tooscillate,buttheoscillationsquicklydecayordon’toccuratall.Thisborderlinecaseiscalledcriticaldamping.
3. Ifb2 6 4v02,thenthecharacteristicpolynomialhascomplexrootsoftheform
r1,2 = -b
2{ i
24v02 - b2
2.
Inthissituation,therestoringforcedominatesthedampingforce.Asaresult,thesolu-tionsareoscillatorywithdecayingamplitudes.Thiscaseiscalledunderdamping,andsolutionshavetheform
y = e-bt>21c1sinat + c2cosat2,wherea =24v0
2 - b2
2.
example 4 Freedampedoscillations Supposethespring-blocksysteminExam-ple11v0 = 4.432ismodeledwithdampingeffectsincluded.Determinethepositiony1t2oftheblock,fort Ú 0,withthefollowingdampingcoefficientsandinitialconditions.
a. c = 1,y102 = 0,y�102 = 1
b. c = 4.43,y102 = 0,y�102 = 3
c. c = 5,y102 = 0,y�102 = 5
Solution
a. Withc = 1andm = 0.5,wehaveb =cm
= 2.Recallingthatthenaturalfrequency
oftheoscillatorisv0 = 4.43,wefindthatb2 - 4v02 � -74.5 6 0,andwehave
thecaseofunderdamping.Therootsofthecharacteristicpolynomialarethecomplexnumbers
r1 � -1 + i174.5
2� -1 + 4.3iandr2 � -1 - i
174.5
2� -1 - 4.3i,
whichgivethegeneralsolution
y = e-t1c1sin4.3t + c2cos4.3t2.
Notethat
y� = -e-t1c1sin4.3t + c2cos4.3t2 + e-t14.3c1cos4.3t - 4.3c2sin4.3t2.
M16_BRIG9324_01_SE_M16_04 pp2.indd 1211 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1212 Chapter 16 • Second-Order Differential Equations
Therefore,theinitialconditionsimplythat
y102 = c2 = 0andy�102 = 4.3c1 = 1orc1 � 0.23.
Thesolutionoftheinitialvalueproblemisy = 0.23e-tsin4.3tanditsgraph(Figure16.23a)featuresdampedoscillations.Aftertheblockhasoscillatedthreetimes,theamplitudeoftheoscillationhasbeenreducedbyafactorofapproximately20.Theinwardspiralofthephase-planegraphalsoillustratesthedecayingoscillations(Figure16.23b).
➤ Thezerosofadampedoscillatoryfunctionareequallyspaced.However,wegenerallydonotrefertotheperiodofsuchafunction.Sometextsusequasiperiodtodescribethedistancebetweenlocalmaximainthiscase.
y � 0.23e�t sin 4.3t
(y(0), y�(0))
(a)
0.1
0
�0.1
t
y
�0.5 y0.5 1.0�1.0
0.5
1.0
�0.5
�1.0
y�
(b)
2� �
Figure 16.23
b. Withm = 0.5andc = v0 = 4.43,wehaveb = 2c,whichimpliesthatb2 - 4v02 = 0.
Inthiscase,wehavecriticaldamping.Thecharacteristicpolynomialhasthesingle
repeatedrootr1 = -b
2= -4.43.Therefore,thegeneralsolutionoftheequationis
y = c1e-4.43t + c2te
-4.43t.Beforeusingtheinitialconditionswecompute
y� = -4.43c1e-4.43t + c2e
-4.43t11 - 4.43t2.
Theinitialconditionsimplythat
y102 = c1 = 0andy�102 = c2 = 3.
Thesolutionoftheinitialvalueproblembecomes
y = 3te-4.43t.
Thesolution(Figure16.24)illustratestheideaofcriticaldamping.Ifthespringinthissystemisashockabsorberonatruck,asuddenjolt1y�102 = 32isquicklydampedandthetruckreturnstoitsequilibriumpositionsmoothly.Dependingontheinitialconditions,theobjectcouldovershoottheequilibriumpositiononce,butthesystemdoesnotundergooscillations.
c. Whenthedampingconstantisincreasedtoc = 5,weseeanothertypeofbehav-ior.Withm = 0.5andv0 = 4.43,wehaveb = 2c = 10,whichimpliesthatb2 - 4v0
2 = 21.5 7 0.Therootsofthecharacteristicpolynomialare
r =-b { 2b2 - 4v0
2
2� -2.68and-7.32,
andthegeneralsolutionis
y = c1e-2.68t + c2e
-7.32t.
y � 3t e�4.43t
1 2
0.2
0t
y
Figure 16.24
M16_BRIG9324_01_SE_M16_04 pp2.indd 1212 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1213
Theinitialconditionsleadtotheequations
c1 + c2 = 0
-2.68c1 - 7.32c2 = 5,
whichhavethesolutionsc1 = 1.08andc2 = -1.08.Therefore,thesolutionoftheini-tialvalueproblemisy = 1.08e-2.68t - 1.08e-7.32t.Thesolution(Figure16.25)decaysquickly,ataratedeterminedbytheleastnegativeroot.Inthiscaseofoverdamping,theresistancedominatestherestoringforce,andtherearenooscillations.
RelatedExercises17–20
➤
Forced Damped OscillationsThefinalcaseincludesalltheeffectsdiscussedsofar:arestoringforce,damping,andanexternalforce.Someofthemanyfeaturesexhibitedbysuchmodelsareexploredintheexercises.Inthissection,wefocusonthebehaviorthatiscommontomostproblemsinthiscategory.
Wenowconsiderequationsoftheform
y� + by� + v02y = F0cosvt.
Thefirstobservationisthataslongasb 7 0(dampedoscillations),thecharacteristicpolynomialalwayshaseithernegativerealrootsorcomplexrootswithnegativerealparts.Ineithercase,thesolutionofthehomogeneousequationconsistsoftermsthatdecreaseinmagnitudeastincreases.Furthermore,aslongasv � v0,theparticularsolutionhastheformAsinvt + Bsinvt.Therefore,thegeneralsolutionlookslike
y = c1y1 + c2y2 + Asinvt + Bsinvt.
decaysast S � particularsolution
Becausethesolutionofthehomogeneousequationdecaysastincreases,itiscalledatransientsolution.Itcontainstheeffectsoftheinitialconditions(thatareusedtode-terminec1andc2),buteventuallyitdiesout.Whatremainsastincreasesisthesteady-stateparticularsolution,whichisdeterminedbytheexternalforce.Ingeneral,weseethatast S � ,y1t2 S yp1t2.
Figure16.26showsthesolutiontotheinitialvalueproblem:
y� + 2y� + 10y = 30cost,y102 = 20,y�102 = -10.
Thetransientsolution(dashedbluecurve)persistsuntilapproximatelyt = 5,atwhichpointthesteady-statesolution(dashedredcurve)withthesamefrequencyastheexternalforcedominates.Thesolutiontotheinitialvalueproblem(solidcurve)isthesumofthetransientandsteady-statesolutions.
Forceddampedoscillationsoccurfrequentlyinelectricalcircuits,thetopicthatwenowconsider. RelatedExercises21–24
➤
Electrical CircuitsOursurveyofelectricalcircuitsisbrief,inpartbecauseallthemathematicshasbeendone.Asyouwillsee,thedifferentialequationsthatgoverncircuitsareidenticaltome-chanicaloscillatorequations.Onlyachangeofterminologyisrequiredtocompletethisbeautifulanalogy.
AbasicelectricalcircuitsthatdisplaysawidevarietyofbehavioristheLCRcircuit.AsshowninFigure16.27,thecircuithasfourcomponentsconnectedinseries:
•avoltagesourcesuchasabatteryorgeneratorwithoutputmeasuredinvolts,
•aninductor(coil)withaninductanceofLhenries,
•aresistorwitharesistanceofRohms,and
•acapacitorwithacapacitanceofCfarads.
y � 1.08e�2.68t � 1.08e�7.32t
2
0.5
0t
y
1
Figure 16.25
t
Steady state solution
�5
5
20
0
y
15
10
5 Transient solution
Solution to initialvalue problem
Figure 16.26
¯˚˘˚˙ ¯˚˚˚˘˚˚˚˙
InductanceL
CurrentI
Voltage sourceV
ResistanceR
CapacitanceC
Figure 16.27
M16_BRIG9324_01_SE_M16_04 pp2.indd 1213 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1214 Chapter 16 • Second-Order Differential Equations
Weassumethatinitiallythereisnocurrentflowinginthecircuitandnochargeonthecapacitor.Whentheswitchisclosedatt = 0,acurrentI1t2,measuredinamperes,flowsthroughthecircuitandachargeQ1t2,measuredincoulombs,buildsonthecapacitor.Thecurrentistherateofchangeofthecharge;thatis,
I1t2 =dQ
dt.
ThedifferentialequationthatdescribesthecurrentinthecircuitcomesdirectlyfromKirchhoff’svoltagelaw:Inaclosedcircuit,thesumofthevoltagedropsacrossthein-ductor,resistor,andcapacitorequalstheappliedvoltage.Elementarycircuittheoryalsogivesthevoltagedropsacrossthecomponents.
•AninductorstoresenergyinamagneticfieldandproducesavoltagedropofLdI
dt.
•AresistordissipatesenergyandproducesavoltagedropofRI.
•AcapacitorstoresenergyinanelectricfieldandproducesavoltagedropofQ>C.
LettingE1t2denotetheappliedvoltage,theequationforthecircuitis
LdI
dt+ RI +
1
CQ = E1t2. (1)
Asitstands,thisequationinvolvesboththecurrentIandthechargeQ.Wecanproceedintwoways.First,wecanusethefactsthatQ�1t2 = I1t2andQ�1t2 = I�1t2,substituteintoequation(1),andwriteanequationforthecharge:
LQ� + RQ� +1
CQ = E1t2. (2)
Often,thecurrentisofmoreinterest.Sowecanalsodifferentiatebothsidesofequation(1)anduseQ�1t2 = I1t2togiveanequationforthecurrent:
LI� + RI� +1
CI = E�1t2. (3)
Weconsiderbothoftheseequations.The assumption that initially there is no current flowing in the circuit and
nochargeon thecapacitormeans that the initial conditions for equation (2) areQ102 = 0andI102 = Q�102 = 0.Theinitialconditionsforequation(3)mustspecifyvaluesofI102andI�102.WealreadyhaveI102 = 0.TodeterminetheinitialvalueI�102,weuseequation(1)witht = 0tofindthat
LI�102 + RI102 +1
CQ102 = E102,
0 0
whichimpliesthatI�102 =E102
L.
Workingfirstwiththecurrentequation(3),wedividetheequationbyLtoobtaintheinitialvalueproblem:
I� +R
LI� +
1
LCI =
1
LE�1t2,I102 = 0,I�102 =
E102L
.
Noticethatthisdifferentialequationissecond-orderwithconstantcoefficients—justlikethemechanicaloscillatorequation.TheremarkableanalogybetweenthetwoequationsisshowninTable16.3.
¯˘˙¯˘˙
M16_BRIG9324_01_SE_M16_04 pp2.indd 1214 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1215
Beforesolvingaspecificinitialvalueproblem,wecanmakesomeobservationsaboutthegeneralsolution.Letting
p =R
L,q =
1
LC,andf1t2 =
1
LE�1t2,
theequationappearsas
I� + pI� + qI = f1t2.
The characteristic polynomial is r 2 + pr + q, and because p =R
L7 0, the char-
acteristicpolynomialalwayshaseithernegativerealrootsorcomplexrootswithnegativerealparts(justasinthecaseofforceddampedoscillators).Therefore,thesolutionofthehomogeneousequationisatransientsolutionthatdecaysintime.Thesteady-statesolu-tionistheparticularsolution,whichdependsontheformoftheright-sidefunctionf.
example 5 LCRcircuitwithconstantvoltage Acircuitconsistsofa1-henryinductor,a50-ohmresistor,anda1/7025-faradcapacitor,connectedinseries,alldrivenbyaconstant800-voltsource.Determinethecurrentinthecircuitatalltimesaftertheswitchisclosed.
Solution LetL = 1,R = 50,1>C = 7025,andE1t2 = 800.ObservingthatE�1t2 = 0,theequationbecomes
I� + 50I� + 7025I = 0,
whichisahomogeneousequation.Thecharacteristicpolynomialr 2 + 50r + 7025hasroots
r =-50 { 12500 - 4 # 7025
2= -25 { 80i.
Therefore,thegeneralsolutionoftheequationis
I = e-25t1c1sin80t + c2cos80t2.
Noticethatthiscircuitisanalogoustoanunderdampedoscillator.Theinitialconditionsare
I102 = 0andI�102 =E102
L= 800.
Wefirstcompute
I�1t2 = -25e-25t1c1sin80t + c2cos80t2 + e-25t180c1cos80t - 80c2sin80t2,
table 16.3
mechanical oscillator electrical circuit
my� + cy� + ky = f LI� + RI� +1
CI = E�
analogous terms
Positiony CurrentIMassm InductanceLDampingc ResistanceRSpringconstantk Reciprocalcapacitance1>CExternalforcef DerivativeofvoltagesourceE�
M16_BRIG9324_01_SE_M16_04 pp2.indd 1215 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1216 Chapter 16 • Second-Order Differential Equations
RelatedExercises25–32
➤
example 6 LCRcircuitwithoscillatoryvoltage ConsideranLCRcircuitwitha1-henryinductor,a50-ohmresistor,anda1/2500-faradcapacitor,drivenbyavoltageofE1t2 = 1021cos60t.Determinethechargeonthecapacitoratalltimesaftertheswitchisclosed.
Solution Wenowworkwiththechargeequation(2).WithL = 1,R = 50,and1>C = 2500,therelevantinitialvalueproblemis
Q� + 50Q� + 2500Q = 1021cos60t,Q102 = Q�102 = 0.
Thecharacteristicpolynomialisr 2 + 50r + 2500,whichhasroots
r =-50 { 12500 - 4 # 2500
2= -25 { 2513i.
Thesolutionofthehomogeneousequationconsistsofoscillatoryfunctionswithdecreas-ingamplitudes:
Qh = e-25t1c1sin2513t + c2cos2513t2.
Tofindtheparticularsolutionusingundeterminedcoefficients,theappropriatetrialsolution(determinedbytheright-sidefunction)is
Qp = Asin60t + Bcos60t.
Substitutingthetrialsolutionandcarryingoutthenecessarycalculations,wefindthat
A =3
10andB = -
11
100.Therefore,thegeneralsolutionoftheequationis
Q = e-25t1c1sin2513t + c2cos2513t2 +3
10sin60t -
11
100cos60t.
whichimpliesthatI�102 = -25c2 + 80c1.Theinitialconditionsgivethevaluesofc1andc2:
I102 = c2 = 0andI�102 = -25c2 + 80c1 = 800,orc1 = 10.
0
Weconcludethatthesolutionoftheinitialvalueproblemis
I = 10e-25tsin80t.
Thegraphofthecurrentshowsahighfrequencywavethatisquicklydamped(Figure16.28a).Thechargeonthecapacitor(obtainedbyintegratingthecurrent)showsafewoscillationsofatransientresponsebeforereachingasteady-statelevelofabout0.11Cwithin0.2seconds(Figure16.28b).
¯˘˙
t
0
I � 10e�25t sin 80t
0.1
(a)
5
0
�5
t
I
0.2
Current
0.1
(b)
0.15
0.1
0.05
t
Q
0.2
Charge oncapacitor
Q(t) � ∫ I(x)dx
Figure 16.28
M16_BRIG9324_01_SE_M16_04 pp2.indd 1216 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1217
Finally,weimposetheinitialconditionsQ102 = Q�102 = 0.Aftermorecalcula-tions(greatlyassistedbyacomputeralgebrasystem),thesolutionoftheinitialvalueproblememerges:
Q = e-25ta-61
10013sin2513t +
11
100cos2513tb +
3
10sin60t -
11
100cos60t.
Farmoreinformativeisthegraphofthecharge,showninFigure16.29a.Thetransientpartofthesolutionhasanangularfrequencyofv = 2513,butitisquicklydamped.Thesteady-statesolutionwithconstantamplitudeandanangularfrequencyofv = 60(period2p>60 � 0.1)isallthatremainsfort 7 0.1.Similarly,thecurrentI1t2 = Q�1t2showsabrieftransientsolutionfollowedbythesteady-statesolutionwithconstantamplitudeandfrequencyv = 60(Figure16.29b).Weseethatthepresenceofavariablevoltagemain-tainsanoscillatorycurrentinthecircuitandchargeonthecapacitor.
I (t) � Q�(t)
0.1
(a) (b)
0.2
0t
Q
0.30.2
CurrentCharge oncapacitor
0.1
20
0
�20
�10�0.2
t
I
0.30.2
10
Figure 16.29 RelatedExercises25–32
➤
Section 16.4 exerciSeSReview Questions1. Explainthemeaningofthewordsdamped,undamped,free,and
forcedastheyapplytoanoscillatorsystem.
2. Inthemodelsdiscussedinthissection,underwhatconditionsdodampedoscillationsoccur?
3. Inthemodelsdiscussedinthissection,underwhatconditionsdobeatsoccur?
4. Inthemodelsdiscussedinthissection,underwhatconditionsdoesresonanceoccur?
5. Explainthestepsrequiredtosolveaninitialvalueproblemforforceddampedoscillations.
6. DescribetheanalogiesbetweenamodelforaforceddampedoscillatorandamodelforanLCRcircuit.
Basic Skills7–12.FreeundampedoscillationsSolvetheinitialvalueproblemassociatedwiththefollowingexperiments.
7. A1-kgblockhangsonaspringwithspringconstantk = 1.44N>m.Theblockispulleddown0.75mandreleasedwithnoinitialveloc-ity.Assumingnoresistanceorexternalforcing,findthepositionof
T
theblockatalltimesafteritisreleased.Graphanddescribethemo-tionoftheblock,andgiveitsperiodofoscillation.
8. A1.5-kgblockhangsonaspringwithspringconstantk = 3.375N>m.Theblockispulleddown0.25mandreleasedwithanupwardvelocityof0.2m>s.Assumingnoresistanceorexternalforcing,findthepositionoftheblockatalltimesafteritisre-leased.Graphanddescribethemotionoftheblock,andgiveitsperiodofoscillation.
9. Whena2-kgblockisattachedtoaspring,itstretchesthespring2.45m.Theblockislifted0.3maboveitsequilibriumpositionandreleasedwithnoinitialvelocity.Assumingnoresistanceorexternalforcing,findthepositionoftheblockatalltimesafteritisreleased.Graphanddescribethemotionoftheblock,andgiveitsperiodofoscillation.
10. A0.5-kgblockhangsonaspringandstretchesthespring0.49m.Theblockispulleddown0.6mandreleasedwithadownwardvelocityof0.25m>s.Assumingnoresistanceorexternalforc-ing,findthepositionoftheblockatalltimesafteritisreleased.Graphanddescribethemotionoftheblock,andgiveitsperiodofoscillation.
M16_BRIG9324_01_SE_M16_04 pp2.indd 1217 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1218 Chapter 16 • Second-Order Differential Equations
11. Considerapendulumconsistingofabobattachedbyamasslessrigidrodtoafrictionlesspivotthatswingsinaplane.Assumingnoresistanceorexternalforcing,theangulardisplacementofthependulummaybeapproximatedbytheequationu� + v0
2u = 0,
wherev02 =
g
/,/isthelengthoftherod,andg = 9.8m>s2isthe
accelerationduetogravity(seeExercise47).Assumeapendulumoflength/ = 0.98mislifted0.2radianfromitsverticalequilibriumpositionandreleasedwithnoinitialvelocity.Findtheangulardisplacementofthependulumatalltimesafteritisreleased.Graphanddescribethemotionofthebob,andgiveitsperiodofoscillation.
12. ReferringtoExercises11and47,considerapendulumoflength/ = 0.49mthatislifted0.25radianfromitsverticalequilibriumpositionandreleasedwithaninitialvelocityofu�102 = 0.1rad>s.Findtheangulardisplacementofthependu-lumatalltimesafteritisreleased.Graphanddescribethemotionofthebob,andgiveitsperiodofoscillation.
13–16.ForcedundampedoscillationsSolvetheinitialvalueproblemassociatedwiththefollowingexperiments.
13. A2-kgblockhangsonaspringwithspringconstantk = 5.12N>m.ThesupportofthespringvibratesandproducesanexternalforceofFext = 4cosvt.Assumenoinitialdisplacementandveloc-ityoftheblock,andnodamping.Graphthesolutionintwocases:v = 1.5andv = 4.Inwhichcasedoesthesolutionhavebeats?
14. A0.5-kgblockhangsonaspringwithspringconstantk = 4.5N>m.ThesupportofthespringvibratesandproducesanexternalforceofFext = 2cosvt.Assumenoinitialdisplacementandvelocityoftheblock,andnodamping.Graphthesolutionintwocases:v = 3.1andv = 0.5.Inwhichcasedoesthesolutionhavebeats?
15. A0.25-kgblockhangsonaspringwithspringconstantk = 4.0N>m.ThesupportofthespringvibratesandproducesanexternalforceofFext = sinvt.Assumenoinitialdisplacementandvelocityoftheblock,andnodamping.Graphthesolutionintwocases:v = 4andv = 1.Inwhichcasedoesthesolutionhaveresonance?
16. A4/3-kgblockhangsonaspringwithspringconstantk = 12.0N>m.ThesupportofthespringvibratesandproducesanexternalforceofFext = 9cosvt.Assumenoinitialdisplacementandvelocityoftheblock,andnodamping.Graphthesolutionintwocases:v = 3andv = 0.5.Inwhichcasedoesthesolutionhaveresonance?
17–18.FreedampedoscillationsSolvetheinitialvalueproblemassociatedwiththefollowingexperiments.
17. A0.3-kgblockhangsonaspringwithspringconstantk = 30N>m.Airresistanceslowsthemotionoftheblockwithadamp-ingcoefficientofckg>s.Solveaninitialvalueproblemwiththefollowingvaluesofcandinitialconditionsy102 = 1,y�102 = 0.Grapheachsolutionandstatewhethertheproblemexhibitsunder-damping,overdamping,orcriticaldamping.
a. c = 4.8kg>s b. c = 6kg>s c. c = 7.5kg>s
18. Three10-kgblockshangonspringswithspringconstantk.Fric-tionineachsystemismodeledwithadampingcoefficientof
T
T
c = 40kg>s.Solveaninitialvalueproblemwiththefollowingvaluesofkandinitialconditionsy102 = 2,y�102 = 0.Grapheachsolutionandstatewhethertheproblemexhibitsunderdamp-ing,overdamping,orcriticaldamping.
a. k = 30N>m b. k = 40N>m c. k = 62.5N>m
19. DesigningashockabsorberAshockabsorbermustbearaloadof250kg(one-fourththemassofthecar).Itisestimatedthatfrictioninthesystemcanbemodeledwithadampingconstantofc = 500kg>s.
a. Findthevalueofthespringconstantthatprovidescriticaldampingforthesystem.
b. Solvetheresultingdifferentialequationsubjecttotheinitialconditionsy102 = 0,y�102 = 0.1thatmodelasuddenjolt.
c. Graphthesolutioninpart(b).Whatisthemaximumdisplace-mentofthecaraccordingtothismodel?
d. Determinetheeffectofincreasingthevalueofkinpart(a)by50%andby100%.
e. Whatistheeffectofdecreasingthevalueofkinpart(a)by50%?
20. DesigningasuspensionsystemAspringinasuspensionsystemsupportsaloadof400kgandhasaspringconstantk = 324N>m.Thedampingconstantcinthesystemcanbevar-iedbyembeddingthespringinapistonfilledwithfluid.
a. Findthevalueofthedampingconstantcthatgivesthesystemcriticaldamping.
b. Solvetheresultingdifferentialequationsubjecttotheinitialconditionsy102 = 0,y�102 = 0.1.
c. Graphthesolutioninpart(b).Whatisthemaximumdisplace-mentoftheloadaccordingtothismodel?
d. Determinetheeffectofincreasingthedampingconstanttoc = 72012anddecreasingthedampingconstanttoc = 36013inthismodel.
21–24.Forceddampedoscillations
21. A1-kgblockhangsfromaspringwithspringconstantk = 5N>m.Adashpotconnectedtotheblockintroducesfrictionwithdampingconstantc = 2kg>s.Thesupportofthespringvi-bratesandproducesanexternalforceofFext = 4cos2t.Assumetheblockisinitiallyatrestattheequilibriumpositionandreleasedwithnoinitialvelocity.
a. Findandgraphthepositionoftheblockafteritisreleased.b. Identifythetransientandsteady-statesolutions,andgraph
themwiththesolutioninpart(a).c. Afterapproximatelyhowmanysecondsdoesthetransient
solutionbecomenegligible?
22. A20-kgblockhangsfromaspringwithspringconstantk = 180N>m.Theblockoscillatesinafluidthatproducesresis-tancewithadampingconstantc = 80kg>s.ThesupportofthespringvibratesandproducesanexternalforceofFext = 3sint.Assumetheinitialpositionoftheblockisonemeterabovetheequilibriumpositionanditisreleasedwithzeroinitialvelocity.
a. Findandgraphthepositionoftheblockafteritisreleased.b. Identifythetransientandsteady-statesolutions,andgraph
themseparately.c. Afterapproximatelyhowmanysecondsdoesthetransient
solutionbecomenegligible?
T
T
T
M16_BRIG9324_01_SE_M16_04 pp2.indd 1218 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1219
23. Consideranoscillatordescribedbytheequation
y� + y� +5
4y = 2cosvt.
a. Findthegeneralsolutionoftheequation.b. Findthesolutionoftheinitialvalueproblemwith
y102 = y�102 = 0.c. Identifythetransientandsteady-statecomponentsofthe
solution.d. Graphthesolutionoftheinitialvalueproblemwith
v =1
2,1,and
3
2.Whichforcingfrequencyproducesthe
steady-stateoscillationwiththegreatestamplitude?
24. Consideranoscillatordescribedbytheequationy� + 2y� + 1v0
2 + 12y = 2cost.
a. Findthegeneralsolutionoftheequation.b. Findthesolutionoftheinitialvalueproblemwith
y102 = y�102 = 0.c. Identifythetransientandsteady-statecomponentsofthe
solution.d. Graphthesolutionoftheinitialvalueproblemwith
v0 = 1,2,and3.Whichnaturalfrequencyproducesthesteady-stateoscillationwiththegreatestmagnitude?
25. AnRCcircuitShowthatthechargeonthecapacitorofacircuit
withoutaninductorsatisfiestheequationRQ� +1
CQ = E1t2
(withL = 0,itisanRCcircuit).Findthechargeonthecapaci-torinacircuitwitha50-ohmresistoranda0.001-faradcapacitorwhenitisdrivenbyaconstant50-voltsource.Doesthechargereachasteady-statevalue?Ifso,whatisit?
26. AnRLcircuitShowthatthecurrentinacircuitwithoutacapaci-torsatisfiestheequationLI� + RI = E1t2.Findthecurrentinacircuitwitha200-ohmresistoranda2-henryinductorwhenitisdrivenbyaconstant100-voltsource.Doesthecurrentreachasteady-statevalue?Ifso,whatisit?
27–32.LCRcircuits
27. AnLCRcircuithasa10-ohmresistor,a0.1-henryinductor,anda1/240-faradcapacitorconnectedinseriestoaconstant100-voltbattery.
a. FindthecurrentinthecircuitassumingthatI102 = Q102 = 0.b. Identifythetransientandsteady-statecurrents.
28. ThecircuitinExercise27(10-ohmresistor,a0.1-henryinductor,anda1/240-faradcapacitor)isconnectedinseriestoavoltagesourcewithoutputE1t2 = 100sin150t.
a. FindthecurrentinthecircuitassumingthatI102 = Q102 = 0.b. Identifythetransientandsteady-statecurrents.c. Graphthesteady-state,transient,andtotalcurrent,fort Ú 0.
29. AnLCRcircuithasan80-ohmresistor,a0.5-henryinductor,anda1/3230-faradcapacitorconnectedinseriestoaconstant200-voltbattery.
a. FindthecurrentinthecircuitassumingthatI102 = Q102 = 0.b. Identifythetransientandsteady-statecurrents.
T
30. AnLCRcircuithasan80-ohmresistor,a0.5-henryinductor,anda1/3232-faradcapacitorconnectedinseriestoavoltagesourcewithoutputE1t2 = 90.5sin64t.
a. FindthecurrentinthecircuitassumingthatI102 = Q102 = 0.b. Identifythetransientandsteady-statecurrents.c. Graphthesteady-state,transient,andtotalcurrent,fort Ú 0.
31. FindthechargeonthecapacitorandthecurrentinanLCRcircuitinwhichan16-ohmresistor,a2-henryinductor,anda1/50-faradcapacitorareconnectedinseriestoavoltagesourcewithacon-stant120-voltoutput.AssumeQ102 = Q�102 = 0.
32. FindthechargeonthecapacitorandthecurrentinanLCRcircuitinwhicha4-ohmresistor,a0.5-henryinductor,anda2/25-faradcapacitorareconnectedinseriestoavoltagesourcewithoutputE1t2 = 30sint.AssumeQ102 = Q�102 = 0.
Further Explorations33. ExplainwhyorwhynotDeterminewhetherthefollowingstate-
mentsaretrueandgiveanexampleoracounterexample.
a. Anoscillatorwithdampingcannothaveaconstant-amplitudepositionfunction.
b. Resonanceoccursonlywithforcedoscillations.c. Resonanceasitisdefinedinthetext(solutionsoftheform
y = Atsinvtory = Atcosvt)cannotoccurifthereisdamp-inginthesystem.
d. AnLCcircuit1R = 02hasdampedoscillations.e. Beatscanoccurinasystemwithdamping.f. Themodeldiscussedinthetextfordampedoscillatorswith
periodicforcingalwayshasasolutionconsistingofadecay-ingtransientcomponentandanon-decayingsteady-statecomponent.
34–35.Transientvs.steady-stateConsiderthefollowinginitialvalueproblems.
a. Solvetheinitialvalueproblem,andidentifythetransientandsteady-statesolutions.
b. Graphthesolutionoftheinitialvalueproblem,thetransientsolu-tion,andthesteady-statesolution.
c. Approximatelyhowlongdoesittakeforthetransientsolutiontodisappear?Confirmthatastincreases,thesolutionoftheinitialvalueproblemapproachesthesteady-statesolution.
34. y� + 2y� + 5y = 10cost,y102 = 1,y�102 = 0
35. y� +1
2y� +
17
16y = 65sint,y102 = 0,y�102 = 0
36–37.AlltransientsolutionsdieConsiderthefollowingoscillatorequations.
a. Findthegeneralsolutionoftheequationandidentifythetransientandsteady-statesolutions.
b. Setc2 = 0andc1 = -2,-1,0,1,and2inthegeneralsolution.Foreachvalueofc1,graphthesolutionandexternalforcefunctiononthesamesetofaxes.
c. Describetherelationshipbetweenthesolutions(foreachvalueofc1)andtheexternalforcefunction.
36. y� + 2y� + 2y = 130sin4t
T
T
M16_BRIG9324_01_SE_M16_04 pp2.indd 1219 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1220 Chapter 16 • Second-Order Differential Equations
42. GravityintheverticaloscillatorInthisderivation,weshowwhythegravitationalforcedoesnotappearintheequationforaverticallysuspendedoscillator.
a. Considerthefigureinwhichablockhangsatrestfromaspring.Thespringisstretchedanamount�ybytheweightmgoftheblock.Wedenotethisequilibriumpositionoftheblocky = 0.Whenthesystemisatequilibrium,explainwhymg = k�y,wherekisthespringconstant.
Unstretchedspring
mg
Equilibriumy � 0
y
�y
b. Supposetheblockispulleddownadistanceyfromitsequilib-riumposition.WenowwriteNewton’ssecondlawusingtheendoftheunstretchedspringasareferencepoint,assumingnodampingorexternalforceandassumingthey-axispointsdownward.Explainwhymy� = -k1y + �y2 + mg.
c. Usetheequilibriumrelationshipmg = k�y,toexpresstheequationofmotionasmy� = -ky,whichistheequationderivedearlier.Noticethatthegravitationalforcedoesnotappear.
Applications43–46.HorizontaloscillatorsTheequationofmotionforaspring-blocksystemthatliesonahorizontalsurface(seefigure)isthesameastheequationofmotionforaverticallysuspendedsystem.Asbefore,misthemassoftheblock,kisthespringconstant,cisthedampingcoefficient(perhapsduetofrictionastheblockslidesonthesurface),andFextisanexternalforce.Weletx1t2bethepositionoftheblockattimet,wherexincreasestotherightandx = 0isthepositionoftheblockatwhichthespringisneitherstretchednorcompressed.
Compressed
Equilibrium
Stretched
x � 0
x � 0x � 0
x � 0x � 0
a. Findthepositionoftheblockinthefollowingsituations.b. Graphthepositionfunction.c. Describethetypeofmotionyouobserve.
37. y� + 3y� + 2y = 170cos4t
38. ForcedundampedsolutionShowthataparticularsolutionofthe
equationy� + v02y =
F0
mcosvtisyp =
F0
m1v02 - v22cosvt.
39. BeatssolutionRecalltheidentity
cosA - cosB = 2sinaB - A
2b sinaB + A
2b .
a. Showthat
cosvt - cosv0t = 2sin1v0 - v2t
2sin
1v0 + v2t
2.
b. Graphthefunctionsonbothsidesoftheequationinpart(a)with(i)v0 = 10,v = 9and(ii)v0 = 10,v = 2toverifytheidentity.Inwhichcasedoyouseebeats?
40. AnalysisoftheforceddampedoscillationequationConsidertheequationmy� + cy� + ky = F0cosvt,whichdescribesthemotionofaforceddampedoscillator.Assumealltheparametersintheequationarepositive.
a. Explainwhythesolutionsofthehomogeneousequationdecayintime.
b. Showthataparticularsolutionisyp = Asinvt + Bcosvt,where
A =cvF0
1cv22 + 1k - mv222andB =1k - mv22F0
1cv22 + 1k - mv222.
c. Usingtheamplitude-phaseformofasolution,showthatyp = Asinvt + Bcosvt = C*sin1vt + w2,where
C* = 2A2 + B2andtanw =B
A.
d. ShowthatC* =F02c2v2 + m21v0
2 - v222,wherev0
2 =k
m.
e. Whatistherelationshipbetweentheforcingfrequencyvandthenaturalfrequencyv0thatproducesthelargestamplitudeC*?Explainwhythisresultisanalogoustoresonanceinthecaseofforcedundampedmotion.
f. Letm = c = F0 = 1andv0 = 3.GraphtheamplitudeC*asafunctionofv.DescribehowC*varieswithrespecttov.
41. ImpedanceUsetheresultofExercise40dandwritetheampli-tudeintermsofcircuitparameters;thatis,replacembyL,cby
R,v02by
1
CL,andF0byvE0.Expresstheamplitudeofthe
steady-statecurrentas
C* =E0BR2 + avL -
1
vCb
2.
Thedenominatorinthisexpressioniscalledtheimpedance(withunitsofohms).Showthattheimpedanceisminimized(which
maximizesC*)whenv2 =1
CL,whichistheanalogofv0 = v.
MaximizingC*(minimizingtheimpedance)oftengivesthebestreceptioninaradioreceiver.
T
M16_BRIG9324_01_SE_M16_04 pp2.indd 1220 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.4 Applications 1221
43. m = 2kg,c = 6kg>s,k = 8N>m,Fext = 0,x102 = 2,x�102 = -1
44. m = 4kg,c = 8kg>s,k = 140N>m,Fext = 0,x102 = -2,x�102 = 1
45. m = 4kg,c = 4kg>s,k = 17N>m,Fext = 148sint,x102 = 0,x�102 = 0
46. m = 8kg,c = 16kg>s,k = 136N>m,Fext = 130cost,x102 = 0,x�102 = 0
47. ThependulumequationApendulumconsistingofabobofmassmswingingonamasslessrodoflength/canbemodeledasanoscillator(seefigure).Letu1t2betheangulardisplacementofthependulumtsecondsafteritisreleased(measuredinradians).Assumingthattheonlyforceactingonthebobisthegravita-tionalforce,wewriteNewton’ssecondlawinthedirectionofmotion(perpendiculartotherod).Noticethatthedistancealongthearcoftheswingiss1t2 = /u1t2,sothevelocityofthebobiss�1t2 = /u�1t2andtheaccelerationiss�1t2 = /u�1t2.
��
mgCircular arc
a. Consideringonlythecomponentoftheforceinthedi-rectionofmotion,explainwhyNewton’ssecondlawismlu�1t2 = -mgsinu1t2,whereg = 9.8m>s2istheaccelera-tionduetogravity.
b. Writethisequationasu� + v02sinu = 0,wherev0
2 =g
/.
c. Noticethatthisequationisnonlinear.Itcanbelinearizedbyassumingthattheangulardisplacementsaresmall1�u� V 12andusingtheapproximationsinu � u.Showthattheresult-inglinearpendulumequationisu� + v0
2u = 0.d. Expresstheperiodofthependulumintermsofgand/.Ifthe
lengthofthependulumisincreasedbyafactorof2,bywhatfactordoestheperiodchange?
48–49.SolvingpendulumequationsUseExercise47andconsiderthefollowingpendulumproblems.
a. Solvetheinitialvalueproblemandgraphthesolution.b. Expressthesolutioninamplitude-phaseform.c. Determinetheperiodofthependulum.
48. m = 1kg,/ = 4.9m,u102 = 0.25,u�102 = 0
49. m = 10kg,/ = 3m,u102 = 0.4,u�102 = -0.2
50. BuoyancyasarestoringforceImagineacylinderoflengthLandcross-sectionalareaAfloatingpartiallysubmergedinacalmlake(seefigure).Assumethatthedensityofthewa-terisrw = 1000kg>m3andthedensityofthecylinderisr 6 1000kg>m3.Archimedes’principlestatesthatthecylinder
T
experiencesanupwardbuoyantforceequaltotheweightofthewaterdisplacedbythecylinder.
Equilibriumy � 0
y(t)
L
a. Asshowninthefigure,assumethatwhenfloatingatrestafractiony*>Lofthecylinderissubmerged.Notethattheweightofthecylinderismg = rALgandtheweightofthedisplacedwaterisy*rw Ag.Concludethatthefractionofthecylinderthatissubmergedistheratiosofthedensities;
thatis,y*
L=
r
rw.
b. Lety = 0correspondtothelevelofthebottomofthecylin-deratequilibrium.Nowsupposethatthecylinderispusheddownfromitsequilibriumpositionandreleased.Lety1t2bethepositionofthebottomofthecylindertsecondsafteritisreleased,whereyincreasesinthedownwarddirection.Apply-ingNewton’ssecondlawmy� = Fext,explainwhythebuoyantforceisFext = -rwAyg(inadditiontothebuoyantforcethatmaintainstheequilibrium).
c. Concludethatthecylinderundergoesundampedoscillationsgovernedbytheequation
y� = -v02y,wherev0
2 =rwg
rL.
d. Whatistheperiodoftheoscillations?Howdoestheperiodvarywiththelengthofthecylinder?Istheperiodgreaterwhenr � rworwhenr V rw?Explainyouranswer.
e. Accordingtothismodel,whatistheperiodoftheoscillationwhenr = rw?Describethissituationphysically.
51–52.SolvingbuoyancyequationsUseExercise50andconsiderthefollowingbuoyantcylindersthatoscillatewiththegiveninitialconditions.a. Solvetheinitialvalueproblemandgraphthesolution.b. Expressthesolutioninamplitude-phaseform.c. Determinetheperiodoftheoscillation.
51. L = 4.9m,r
rw=
1
2,y102 = 0.25,y�102 = 0
52. L = 2m,r
rw= 0.7,y102 = 0.5,y�102 = 0
53. CompartmentmodelsanddrugmetabolismCompartmentmod-elsareusedtosimulatemanufacturingprocesses,ecologicalsys-tems,andtheassimilationofdrugsbythebody(pharmacokinetics).Thefigureshowsatwo-compartmentmodelforadrugassimilationproblem.Compartment1correspondstothebloodvolume,whichhasaninputofthedrugataspecifiedratef.Compartment2cor-
T
M16_BRIG9324_01_SE_M16_04 pp2.indd 1221 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1222 Chapter 16 • Second-Order Differential Equations
respondstothekidneysandhasanoutflowofthedrugdeterminedbytherateconstantk3.Inaddition,thereisexchangeofthedrugbetweenthecompartmentsdeterminedbytherateconstantsk1andk2(seefigure).Letx11t2andx21t2betheamountofdrugineachcompartmentttimeunitsafterthedosingbegins.Theequationsthatdescribetheamountofdrugineachcompartmentare
x1� = -k1x1 + k2x2 + f1t2 outflow inflow input from1 from2 from outside
x2� = k1x1 - k2x2 - k3x2
inflow outflow outflow from1 from2 tooutside
f(t)
k3
2k1
k2
1
a. Advancedmethodscanbeusedtosolvetwofirst-orderdiffer-entialequations.Alternatively,wecanconvertthesetwoequa-tionstoanequivalentsecond-orderequationthatwecansolve.Differentiatethefirstequationwithrespecttotandusethesecondequationtoeliminatex2andx2�.Showthattheresultingequationis
x� = -1k1 + k2 + k32x� - k1k3x + 1k2 + k32f1t2 + f�1t2,
wherewehavereplacedx1byx.
b. Showthattheinitialconditionsx1102 = A,x2102 = 0becomex102 = A,x�102 = -k1x102 + f102,whereagainwehavere-placedx1byx.
54–55.SolvingcompartmentmodelsUseExercise53andconsiderthefollowingcompartmentmodelswiththegiveninitialconditions.
a. Solvetheinitialvalueproblemforthemassofdrugincompartment1.
b. Determinethemassofdrugincompartment2.c. Graphthemassofdruginbothcompartmentsandinterpretthe
solutions.
54. k1 = 0.1,k2 = 0.02,k3 = 0.05,f1t2 = 1,x1102 = x2102 = 0(infusion:constantinput)
55. k1 = 0.1,k2 = 0.02,k3 = 0.05,f1t2 = 0,x1102 = 10,x2102 = 0(injectionatt = 0)
T
Quick check anSwerS
1. Damped,freeoscillations;undamped,forcedoscillations. 2. Period = 2p>4.5,4.5oscillationsper2ptimeunits,4.5>2poscillationspertimeunit. 3. Thesoundisloud-estatthepeaksofthelongwave:t = p>2,3p>2, c .4. Thevalueofthelimitis0;solutionsdecayinmagnitudeforallAanda.
➤
¯˘˙
¯˘˙ ¯˘˙ ¯˘˙
¯˘˙ ¯˘˙
16.5 ComplexForcingFunctionsTheoscillatorequationwithdampingandexternalforcingisthemostgeneralequationwehaveconsidered,anditisusedtomodelbothmechanicalandelectricaloscillators.Forthisreason,weinvestigatethisequationinmoredetail.
The Transfer FunctionTheoscillatorequation
my� + cy� + ky = f
*1t2,
modelsatime-invariantsystembecausethecharacteristicsofthesystem,describedbytheco-efficientsm,c,andk,areconstantintime.Dividingthroughthisequationbym,itcanbewritten
y� + by� + v02y = F1t2,whereb =
cm
,v02 =
km
,andF1t2 =f *
m;
alltermsintheequationareaccelerations.Recallthatbmeasuresthedampinginthesys-temandv0 7 0isthenaturalfrequencyoftheoscillator.Weconsiderthecaseofpassivesystems,inwhichb 7 0.
Asalreadyshown,thesolutiontothisequationhastwocomponents:atransientsolu-tionthatinvolvestheinitialconditionsanddecaysintime,anda(particular)steady-statesolutionthatisdeterminedbytheforcingfunctionF.Ourgoalistostudythesteady-statesolutioninthepresenceofperiodicforcingfunctions.Therefore,wemaketwoassump-tionstofocusthediscussion.
M16_BRIG9324_01_SE_M16_04 pp2.indd 1222 20/07/12 1:08 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.5 ComplexForcingFunctions 1223
First,weassumezeroinitialconditionsy102 = y�102 = 0,whichremovesthetran-sientsolution.Second,weconsideroscillatoryforcingfunctionsoftheform
F1t2 = F0cos1vt + a2,
wheretheamplitudeF0,theforcingfrequencyv,andtheinitialphaseaarespecified.Fortime-invariantlinearsystems,itisadvantageoustoworkwithcomplex-valued
exponentialforcingfunctions.NotingthatF0cos1vt + a2 = Re5F0ei1vt+a26,wecon-
siderforcingfunctionsoftheform
F1t2 = F0ei1vt+a2 = F0eiaeivt = feivt.
f
Theconstant f = F0eiaistheinitial complex amplitude;itsmagnitudeis
� f� = �F0eia� = �F0� �eia� = �F0�.
Youwillseethatusingaforcingfunctionofthisformsimplifiestheworkoffindingsolutions.Tofindaparticularsolutionoftheequation
y� + by� + v02y = feivt,
weonceagainapplythemethodofundeterminedcoefficientsandusethetrialsolutionyp = Aeivt,whereAistobedetermined.Substitutingypintotheequationresultsinthefollowingcalculation:
➤ Theinitialphaseaisincludedtoaccountforpossibletimedelaysintheforcingfunction.
➤ PleaseseeAppendixCforareviewofcomplexarithmetic.
¯˘˙
¯˘˙
1
1Aeivt2� + b1Aeivt2� + v02Aeivt = feivt Substituteyp.
-Av2eivt + bAiveivt + v02Aeivt = feivt Differentiate;i2 = -1.
eivtA1-v2 + ibv + v022 = feivt. Collectterms.
Thecommonfactoreivtisnonzeroandmaybecancelled.RecallingthatthegoalistodetermineA,wefindthat
A1-v2 + ibv + v022 = f Canceleivt.
A =f
-v2 + ibv + v02 SolveforA.
Therefore,theparticularsolutiontotheequationbecomes
yp = Aeivt =1
-v2 + ibv + v02feivt = H1v2feivt.
H1v2Thefunction
H1v2 =1
-v2 + ibv + v02
thatwehavedefinediscalledthetransferfunctionforthetime-invariantlinearsystem.Itdependsonthedampingconstantb,thenaturalfrequencyv0,andtheforcingfrequencyv.WewriteHasafunctionofv,becauseweholdthesystemparametersbandv0fixedandanalyzetheresponseofthesystemastheforcingfrequencyvvaries.
¯˚˚˚˘˚˚˚˙
M16_BRIG9324_01_SE_M16_05 pp2.indd 1223 23/07/12 11:19 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1224 Chapter 16 • Second-Order Differential Equations
Asacomplexquantity,wecanwritethetransferfunctioninthepolarform
H1v2 = g1v2eig1v2,
whereg1v2 = �H1v2�isthegainfunctionofthesystemandthephaseangleg1v2isthephaselagfunction.NotethattheinputfunctionFandtheoutputyphavethesamefre-quencyv.Thephaselagfunctiong1v2givesthephaseoftheoutputrelativetotheinput,foralltimes.
Weshownextthatforpassivesystems1b 7 02,thephaselagfunctionisnegative1g1v2 6 02,whichmeanstheoutputlagstheinput(hencetheterminology).Foractivesystems1b 6 02,thephaselagispositiveandtheoutputleadstheinput.
Ashortcalculation(Exercise22)allowsustosplitHintoitsrealandimaginaryparts:
H1v2 =1
-v2 + ibv + v02 =
v02 - v2
1v02 - v222 + b2v2 - i
bv
1v02 - v222 + b2v2.
Hr1v2 Hi1v2Wenowfindthatthegainfunctionis
g1v2 = �H1v2� = 2Hr1v22 + Hi1v22 =121v0
2 - v222 + b2v2.
Similarly,thephaselagfunctionisgivenby
tang1v2 =Hi1v2Hr1v2 = -
bv
v02 - v2.
Asshownshortly,thephaselagfunctionhasvaluesintheinterval-p 6 g1v2 … 0.
Summary Transfer, Gain, and Phase Lag Functions
Theoscillatorequationy� + by� + v02y = F1t2hasthetransfer function
H1v2 = g1v2eig1v2 =1
-v2 + ibv + v02,
wherethegain functionis
g1v2 = �H1v2� =121v0
2 - v222 + b2v2
andthephase lag functionisgivenby
tang1v2 = -bv
v02 - v2.
¯˚˚˚˘˚˚˚˙ ¯˚˚˚˘˚˚˚˙
Thetransferfunctioncompletelydefinestherelationshipbetweentheinputandtheoutput(orresponse)ofthesystem.Conceptually,thetransferfunction“transfers”thein-putintotheoutput,inthefollowingway:
Input:F1t2 = feivt hH1v2
Output:yp1t2 = H1v2feivt.
g1v2eig1v2
Boththeinputandoutputarecomplexfunctions.However,itistheirrealpartsthatgivedirectlymeasurablequantities.Specifically,therealpartoftheinputis
Re5F1t26 = F0cos1vt + a2,
¯˘˙
➤ Recallthatacomplexnumberz = x + iycanbewritteninthepolarformreiu,wherer = 0 z 0 = 2x2 + y2andtanu = y>x.
M16_BRIG9324_01_SE_M16_05 pp2.indd 1224 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.5 ComplexForcingFunctions 1225
andtherealpartoftheoutputis
➤ Notethatifcos1vt + a2istheinputandcos1vt + a + g2istheoutputwithg 6 0,thenthegraphoftheoutputisthegraphoftheinputshiftedtotheright.Therefore,theoutputlagstheinput.
Weseethattheoutputamplitudeg1v2F0isg1v2multipliedbytheinputamplitudeF0,whiletheoutputlagstheinputatalltimes(becauseg1v2 6 0whenb 7 0).
Re5yp1t26 = Re5H1v2feivt6 Substituteforyp.
= Reg1v2eig1v2F0eiaeivt SubstituteforH1v2and f.
H1v2 f
= g1v2F0# Re5eig1v2eiaeivt6 g1v2andF0arereal.
= g1v2F0cos1vt + a + g1v22. eaeb = ea + bandRe5eiu6 = cosu
¯˚˘˚˙ ¯˘˙
Summary Solution of Forced Oscillator Equations
Theoscillatorequation
y� + by� + v02y = Re5 feivt6 = F0cos1vt + a2
input
hasthesolution(output)
Re5yp1t26 = g1v2F0cos1vt + a + g1v22,
wheregisthegainfunctionandgisthephaselagfunction.
¯˚˚˚˚˚˚˘˚˚˚˚˚˚˙
Properties of the Transfer FunctionThetransferfunction—specificallyitscomponents,thegainandphaselagfunctions—arefundamentalinthedesignofacousticalandelectricalfilters,noisecancelingdevices,andotherinstruments.Solet’slookatthemmoreclosely.
Theforcingfrequencythatproducesthemaximumresponseofthesystemisoftenofpracticalinterest.Insomecases(oftenmechanical),thisfrequencyistobeavoided,whereasinothercases(oftenelectrical)itissoughtbecauseitcorrespondstotheoptimalperformanceofadevice.Itcanbeshown(Exercise23)thatthegainfunction
g1v2 =121v0
2 - v222 + b2v2
hasamaximumvalueatv = Bv02 -
b2
2,providedb 6 22v0,whichcorrespondsto
weakdamping.Inthestrongdampingcase1b Ú 22v02,themaximumvalueofgoccursatv = 0.
ThecaseshowninFigure16.30a1b = 0.5andv0 = 12correspondstoweakdamp-ing,andthegainfunctionismaximizedwhenv � 0.935.Ingeneral,asthedampingbapproacheszero,thelocationofthepeakinthegaincurveoccurscloserandclosertov0,thenaturalfrequencyofthesystem.Recallthatinanundampedsystem,theconditionv = v0givesrisetoresonance(unboundedgrowthofsolutions).Inaweaklydampedsystem,maximumamplitudesoccurwhenv � v0.
Let’slookatthephaselagfunction(Figure16.30b)
tang1v2 = -bv
v02 - v2.
Noticethatg102 = 0,whichmeansthatiftheforcingfrequencyiszero1v = 02,thedrivingforceandtheoutputareconstant,andthereisnolagbetweentheinputandtheout-put.Whenvissmallandpositive,g1v2issmallandnegative,implyingthattheresponse
➤ Ifg = 0,theinputandoutputareinphase;theirmaximaandminimacoincide.Ifg = {p>2,theinputandoutputareaquarter-periodoutofphase.Ifg = {p,thephaselagisamaximum,andtheinputandoutputareahalf-period(or180degrees)outofphase.
c c
M16_BRIG9324_01_SE_M16_05 pp2.indd 1225 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1226 Chapter 16 • Second-Order Differential Equations
oftheoscillatorcloselyfollowsthevariationsinthedrivingforce.Asvincreases,g1v2decreasesmonotonicallyandasv S v0
-,weseethattang1v2 S - � ,whichimpliesthat
g1v2 S -p
2.Asv continues to increase, tang1v2 S 0,whichmeansg1v2 S -p.
Weseethatthephaselagfunctionalwaysliesintheinterval-p 6 g1v2 … 0.Summa-rizedbriefly,thegreatertheforcingfrequency,thegreaterthephaselagbetweentheinputandoutput.
ExamplE 1 Gain and phase lag Considertheoscillatorequationy� + by� + v02y =
F0cosvt,wherev0 = 1,b = 0.5,andF0 = 2(thegainandphaselagfunctionsareshowninFigure16.30).
a. Findthegainandphaselagfunctions.
b. Assumingy102 = y�102 = 0,findandgraphthesolutionofequationRe5yp6 withforcingfrequenciesv = 0.8andv = 2.
Solution
a. Withthegivenvaluesofv0andb,thegainfunctionis
g1v2 =1B11 - v222 +
v2
4
,
andthephaselagfunctionisgivenby
tang1v2 = -v>2
1 - v2.
b. Recallthattheparticularsolutionofthedifferentialequationis
Re5yp6 = g1v2F0cos1vt + g1v22.
Lettingv = 0.8,wefindthatg10.82 � 1.86andg10.82 � -0.84.Therefore,withF0 = 2,thesolutionis
Re5yp6 = 1.86 # 2 # cos10.8t - 0.842 = 3.72cos10.8t - 0.842.
ThegraphsoftheforcingfunctionF1t2 = 2cos0.8tandtherealpartofthesolutionareshowninFigure16.31.WeseethattheamplitudeoftheforcingfunctionisF0 = 2andtheamplitudeofthesolutionisnearlytwicethatamount,reflectingtheampli-ficationbyafactorofg10.82 � 1.86.Alsonotethatthefirstlocalmaximumofthe
b � 0.5, 0 � 1
(b)
��
�
Gain function
Phase lag function
(a)
2
1
0
0
g
43210 �
4321 �
�
b � 0.5, 0 � 1�
2�
�
�
FigurE 16.30
M16_BRIG9324_01_SE_M16_05 pp2.indd 1226 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.5 ComplexForcingFunctions 1227
solution(output)curveoccursafterthefirstmaximumoftheforcingfunctioncurve,reflectingthephaselag.Toestimatetheactualshiftinthecurves,wewrite
cos10.8t - 0.842 = cosa0.8a t -0.84
0.8b b = cos10.81t - 1.0522.
Inthisform,weseetheshift(totheright)ofthesolutioncurverelativetotheforcingfunctioncurveisapproximately1.05,consistentwithFigure16.31.Ingeneral,
theshiftinthecurvesisgivenbyg1v2v
.
4
2
�4
�2
t
b � 0.5, 0 � 1, � 0.8� �y
Phaselag
04321
y � Re{yp}
y � F(t) � 2 cos 0.8t
FigurE 16.31
2
1
�2
�1
t
b � 0.5, 0 � 1, � 2� �y Phase
lag
04321
y � Re{yp}
y � F(t) � 2 cos 2t
FigurE 16.32
Withthehigherforcingfrequencyv = 2,wefindthatg122 � 0.32andg122 � -2.82.Thesolutionisnow
Re5yp6 = 0.32 # 2 # cos12t - 2.822 = 0.64cos12t - 2.822.
ThegraphsoftheforcingfunctionandtherealpartofthesolutionareshowninFigure16.32.Inthiscase,theamplitudeofthesolution(output)isreducedbyafactorofg122 � 0.32.Thefirstmaximumofthesolutioncurveagainlagsthefirstmaximumoftheforcingfunctioncurve.Theshiftinthecurvesisg1v2v
=g122
2� -1.41,consistentwithFigure16.32.
RelatedExercises5–16
➤
AdifferentviewofthegainfunctionisshowninFigure16.33.Inthisfigurewefixv0 = 1andletb = 0.3,1,and3.Forb Ú 12v0(strongdamping),theamplitudecurvehasasinglelocalmaximumatv = 0withavalueof1.Inthiscase,thevaluesofthegain
M16_BRIG9324_01_SE_M16_05 pp2.indd 1227 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1228 Chapter 16 • Second-Order Differential Equations
functionarelessthan1inmagnitude,meaningtheamplitudeoftheresponse(output)islessthantheamplitudeoftheforcingfunction(input).Atb = 12v0,thegaincurves“flip”andforb 6 12v0(weakdamping),weseevaluesofthegainthataregreaterthan1.Inthisweakdampingcase,itispossibletoamplifytheamplitudeoftheresponseprovidedtheforcingfrequencyischosenappropriately.
b � 1
b � 0.3
b � 3
Gain functions
Weak damping
Strong damping
3
2
1
0
g
3.00.5 1.0 1.5 2.52.00.0 �
0 � 1�
FigurE 16.33
ExamplE 2 A low-pass filter ConsidertheLCRcircuitshowninFigure16.34.
a. Derivethedifferentialequationforvout.
b. Findthetransferfunctionandcomputethegainfunction.
c. Givetherelationshipbetweenvinandvout.
d. FindtherelationshipamongL,C,andRsuchthatthegainfunctionismonotonicallydecreasing,for0 … v 6 � .
e. Computethegainfunctionandcomputetheratio ` vout
vin` (asafunctionofv)when
L = 0.5,C = 1>25,andR = 6.Interpretthisresult.
Solution
a. ByKirchhoff’svoltagelaw(seeSection16.4)wehave
vin - RI - LdI
dt- vout = 0.
Thevoltagedropacrossthecapacitorisvout =Q
C.Differentiatingbothsidesofthis
expressionandusingI = Q�1t2givesv�out =Q�
C=
I
C,orI = Cv�out.Substituting
forIinthevoltagelawgivesasecond-orderdifferentialequationforvout:
vin - RCv�out - LCv�out - vout = 0.
DividingthroughbyLCandrearranging,theequationbecomes
v�out +R
Lv�out +
1
LCvout =
1
LCvin =
1
LCfeivt,
vin
wherewehaveassumedthattheinputfunctionisthecomplexexponentialvin = feivt.
Vout
I(t)
InductanceL
Voltagesource
Vin
ResistanceR
CapacitanceC
FigurE 16.34
¯˘˙
M16_BRIG9324_01_SE_M16_05 pp2.indd 1228 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.5 ComplexForcingFunctions 1229
b. Toobtainthetransferfunction,weusethedefinitiongivenpreviouslywithb =R
Land
v02 =
1
LC.Theresultisthat
H1v2 =1
-v2 + ivR
L+
1
LC
=
1
LC- v2 - i
R
Lv
a 1
LC- v2b
2
+ aR
Lb
2
v2
.
Wecomputethegainfunction
g1v2 = �H1v2� = 2Hr1v22 + Hi1v22
andfindthat
g1v2 =1B a 1
LC- v2b
2
+ aR
Lb
2
v2
.
c. Theinputtothesystemisvin = feivtandtherightsideofthedifferentialequationis
1
LCvin.Therefore,theoutputofthesystemis
vout = H1v21
LCvin.
d. Toanalyzethebehaviorofthegainfunction,welocatethelocalextremaofg.Ob-servethatghasalocalmaximumatthesamepointsthatthedenominatorhasalocalminimum.Furthermore,tominimizethedenominator,wecansimplyminimizethequantity
h1v2 = a 1
LC- v2b
2
+ aR
Lb
2
v2
underthesquarerootinthedenominator.Tofindthecriticalpointsofh,wecompute
h�1v2 = 2a 1
LC- v2b1-2v2 + 2aR
Lb
2
v Differentiate.
= 2va2av2 -1
LCb + aR
Lb
2
b . Simplify.
Weseethath�102 = 0,sov = 0isacriticalpointforallvaluesofL,C,andR.Additionalcriticalpoints,iftheyexist,satisfy
2av2 -1
LCb + aR
Lb
2
= 0.
Aftersomesimplification,thisconditionbecomes
v2 =1
LC-
R2
2L2.
Thecriticalpointontheintervalv 7 0is
v = B 1
LC-
R2
2L2,
M16_BRIG9324_01_SE_M16_05 pp2.indd 1229 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1230 Chapter 16 • Second-Order Differential Equations
provided1
LC-
R2
2L2 Ú 0orR … A2L
C.Abitmoreanalysisshowsthatthiscritical
pointcorrespondstoalocalminimumofhandtherefore,alocalmaximumofg.Tosummarize,
•ifR … A2L
C,thenghasalocalmaximumforv 7 0;
•ifR 7 A2L
C,thenghasalocalmaximumatv = 0andismonotonicallydecreasing
forv Ú 0.
Noticethatforallparametervaluesg102 = LC.
e. SubstitutingthegivenvaluesofL,C,andR,weseethatR 7 A2L
C,soweexpectthe
gainfunctiontohaveasinglemaximumatv = 0.Usingtheseparametervalues,thegainfunctionis
g1v2 = �H1v2� =1B a 1
LC- v2b
2
+ aR
Lb
2
v2
=12150 - v222 + 144v2
.
Tointerpretthegainfunction,wecomputethemagnitudeoftheratiooftheoutputtotheinput.Usingpart(c),wehave
vout
vin` =
† H1v21
LCvin
vin
† Substitute.
=g1v2LC
Simplify;�H1v2� = g1v2.
=1
LC
12150 - v222 + 144v2 Substituteforg.
Bygraphingthisratio,wecanseetheeffectofvariousforcingfrequenciesvontheinputsignal.Thegraph(Figure16.35)indicatesthatallforcingfrequenciesproduceanattenuationoftheinputsignal.However,thelowfrequenciesareattenuatedtheleast,whereasfrequencieswithv 7 10arereducedinmagnitudebyafactorofatleast0.5.Becausethelowfrequenciesareallowedto“pass,”thecircuitiscalledalow-passfilter.
➤ Asimilaranalysisforahigh-passfilterisgiveninExercises24–28.
Low-pass �lter1.0
0.8
0.6
0.4
0.2
0.010 30200 �
L � 0.5, C � 1/25, R � 6
Vout
Vin
FigurE 16.35 RelatedExercises17–20
➤
M16_BRIG9324_01_SE_M16_05 pp2.indd 1230 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

16.5 ComplexForcingFunctions 1231
SEction 16.5 ExErciSESReview Questions
ExtensionsWehaveshownhowthetransferfunctionisusedtofindandinterpretsolutionsofoscil-latorequations.Theextensionsoftheseideasarealsopowerful.Let’sproceedinsteps.
Supposetheforcingfunctionconsistsoftwocomponentswithtwodifferentfrequen-ciesv1andv2;thatis,
F1t2 = F1eiv1t + F2eiv2t.
Becausethedifferentialequationislinear,wemaysuperimposethesolutionscorrespond-ingtoeachcomponentindividually.Theresultingsolutionis
y = H1v12F1eiv1t + H1v22F2eiv2t.
Recallthatoncebandv0arespecified,wehaveasingletransferfunction,anditiseasytocomputeH1v12andH1v22.
Nowsupposethattheforcingfunctionisasumofncomponentswithdifferentfre-quenciesandamplitudes;thatis,
F1t2 = an
k = 1Fkeivkt.
Onceagain,wemaysuperimposesolutionsofindividualequationsandgivethesolutionintheform
y = an
k = 1H1vk2Fkeivkt.
Asbefore,oncethetransferfunctionisdetermined,itiseasytocomputethevaluesofH1vk2,fork = 1, c,n.
Wecannowmakearemarkableleap.SupposetheforcingfunctionFisanysmoothperiodicfunction.ThenitispossibletorepresentFintermsofaFourierseriesoftheform
F1t2 = a�
k = 1Fkeivkt.
FormallythemethodofsolutionoutlinedabovecanbecarriedoutandthesolutioncanalsobeexpressedintermsofaFourierseries.
Let’stakeonefinalstep.Iftheforcingfunctionisanyfunction—notnecessarilyperiodic—thatmeetsfairlygeneralconditions,itcanbeexpressedintermsofaFourierintegral.Againthemethodofsolutionoutlinedaboveworksandthesolutioncanbeex-pressedintermsofaFourierintegral.Thesimpleideaofusingacomplexexponentialforcingfunctionprovestobeincrediblypowerfulandleadstothesolutionofawiderangeofoscillatorproblems.
1. Writethetransferfunctionintermsofthegainandphaselagfunctions.
2. Forthesystemsdiscussedinthissection,explaintherelationshipbetweentheinputandtheoutputintermsofthegainfunction.
3. Forthesystemsdiscussedinthissection,explaintherelationshipbetweentheinputandtheoutputintermsofthephaselagfunction.
4. Useagraphtoexplainwhatitmeansfortheoutputtolagtheinput.
Basic Skills5–10. Gain and phase lag functionsConsidertheoscillatorequationy� + by� + v0
2y = F0cosvt.
a. Writeandgraphthegainfunctionandthephaselagfunctionforfollowingsystems.
b. Findthelocationofthelocalmaximumofthegainfunctionforv Ú 0.Statewhetherthesystemhasstrongorweakdamping.
T
M16_BRIG9324_01_SE_M16_05 pp2.indd 1231 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1232 Chapter 16 • Second-Order Differential Equations
5. b = 1,v0 = 1
6. b = 3,v0 = 1
7. b = 0.1,v0 = 1
8. b = 90,v0 = 100
9. b = 150,v0 = 100
10. b = 300,v0 = 400
11–16 Solutions to oscillator equationsConsidertheoscillatorequa-tiony� + by� + v0
2y = F0cosvt.Forthefollowingparameterval-ues,dothefollowing.
a. Findthegainandphaselagfunctions(seeExercises5–10).b. Findtherealpartofthesolution.c. Graphtheforcingfunctionandtherealpartofthesolution.
Verifythatthegainfunctionandphaselagfunctionarecorrect.
11. b = 1,v0 = 1,F0 = 2,v = 2
12. b = 3,v0 = 1,F0 = 10,v = 1
13. b = 0.1,v0 = 1,F0 = 5,v = 3
14. b = 90,v0 = 100,F0 = 50,v = 50
15. b = 150,v0 = 100,F0 = 80,v = 200
16. b = 300,v0 = 400,F0 = 150,v = 200
17–20. Analyzing circuit equationsConsiderthecircuitequation
v�out +R
Lv�out +
1
LCvout =
1
LCvin =
1
LCfeivt.
a. Forthegivenparametervalues,computethegainfunction.b. Graphthegainfunctionandfindthelocationofitsmaximumvalue
forv Ú 0.c. Onwhatintervalisthegainfunctionmonotonically
decreasing?d. Computeandgraphtheratio ` vout
vin` andinterprettheresult.
17. L = 2,C = 1>144,R = 20
18. L = 2,C = 1>144,R = 40
19. L = 8,C = 1>120,R = 400
20. L = 8,C = 1>100,R = 30
Further Explorations21. Explain why or why notDeterminewhetherthefollowingstate-
mentsaretrueandgiveanexampleoracounterexample.
a. Thetransferfunctionforaforcedoscillatorequationisinde-pendentoftheforcingfunction.
b. Thetransferfunctionforanundampedoscillatorisareal-valuedfunction.
T
T
22. Real and imaginary partsShowthatthetransferfunctiondis-cussedinthissectioncanbeexpressedintermsofitsrealandimaginarypartsintheform
H1v2 =1
-v2 + ivb + v02
=v0
2 - v2
1v02 - v222 + b2v2 - i
bv
1v20 - v222 + b2v2.
23. Maximum value of the gain functionThegoalistodeterminethelocationofthemaximumvalueofthegainfunction
g1v2 =121v0
2 - v222 + b2v2.
a. Explainwhythelocalmaximumvaluesofg,forv Ú 0,occuratthesamepointsasthelocalminimumvaluesofthedenominator.
b. Explainwhythelocalmaximumvaluesofg,forv Ú 0,occuratthesamepointsasthelocalminimumvaluesofh1v2 = 1v0
2 - v222 + b2v2.c. Showthath�1v2 = 2v1b2 - 2v0
2 + 2v22.d. Showthatifb 6 12v0,thenghasalocalmaximumat
v = Bv02 -
b2
2.Whatisthemaximumvalueofg?
e. Showthatifb Ú 12v0,thengismonotonicallydecreasingforv Ú 0,andhasalocalmaximumatv = 0.
f. Whichcase,part(d)orpart(e),correspondstostrongdamp-ing?Explain.
24. A high-pass filterConsidertheLCRcircuitshowninthefigure.
Vout
Capacitance CQ(t)
Voltagesource
Vin
ResistanceR
InductanceL
a. ExplainwhyKirchhoff’svoltagelawforthecircuitis
vin - RI1t2 -Q1t2
C- vout = 0.
b. UsethefactsthatI1t2 = Q�1t2andthevoltageacrossthein-ductorisvout = LI�1t2 = LQ�1t2toshowthattheequationforthechargeonthecapacitoris
Q� +R
LQ� +
1
LCQ =
1
Lvin =
1
Lfeivt.
c. Findthetransferfunctionfortheequationandcomputethegainfunction.
d. Showthatthesolutionofthedifferentialequationis
Q1t2 = H1v21
Lfeivt.ThenconcludethatQ�1t2 = -v2Q1t2.
T
T
M16_BRIG9324_01_SE_M16_05 pp2.indd 1232 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

ReviewExercises 1233
e. NowwemustrelatevouttoQ.Usepart(b)toshowthat
vout = -v2LQ = -v2LH1v21
Lfeivt = -v2H1v2vin.
f. Thequantityofinterestistheratioofthemagnitudesoftheinputandtheoutput.Showthat
` vout
vin` = v2�H1v2� = v2g1v2 =
v2B av2 -1
LCb
2
+R2
L2v2
.
g. ShowthatforR 7 A2L
Ctheratioinpart(f)ismonotonically
increasingforv 7 0.h. Underwhatconditions,ifany,doestheratioinpart(f)havea
localextremumforv 7 0?i. Explainwhythecircuitiscalledahigh-passfilter.
25–28. High-pass filtersConsiderthehigh-passfilterequationinExercise24.
a. Forthegivenparametervalues,computethegainfunction.b. Graphthegainfunctionanddescribeitsbehaviorforv Ú 0.
c. Computeandgraphtheratio ` vout
vin` andinterprettheresult.
25. L = 0.2,C = 1>250,R = 8
26. L = 0.2,C = 1>250,R = 12
27. L = 40,C = 1>2000,R = 10
28. L = 40,C = 1>2000,R = 30
T
CHAPTER 16 REviEw ExERCisEs
1. Explain why or why not Determinewhetherthefollowingstate-mentsaretrueandgiveanexampleoracounterexample.
a. Theequationy� + 2y� - ty = 0issecondorder,linear,andhomogeneous.
b. Theequationy� + 2y� - y2 = 3issecondorder,linear,andnonhomogeneous.
c. Tosolvetheequationt2y� + 2ty� + 4y = 0,usethetrialso-lutiony = ertandfindr.
d. Tofindtheparticularsolutionoftheequationy� - 2y� + y = et,usethetrialsolutionyp = Aet.
e. Thefunctiony = 0isalwaysasolutionofasecond-orderlinearhomogeneousequation.
2–9. Solving homogeneous equationsFindthegeneralsolutionofthefollowinghomogeneousequations.
2. y� + y� - 6y = 0
3. y� - 2y� - 8y = 0
4. y� + 8y = 0
5. y� + 36y = 0
6. y� + 4y� + 13y = 0
7. y� + 4y� + 4y = 0
8. t2y� + 3ty� + 8y = 0,fort 7 0
9. y� - 2y� + 5y = 0
10–15. Particular solutionsFindaparticularsolutionofforthefollowingequations.
10. y� - 3y� - 4y = 2e2t
11. y� + 25y = 3cos2t
12. y� - y� - 2y = 3t2 + 10
13. y� + 5y� - 6y = t + 2e - t
14. y� - y� - 6y = 2e - 2t
15. y� + 16y = 2cos4t
16–21. General solutionsFindthegeneralsolutionofthefollowingequations.
16. y� - 6y� - 7y = 4et
17. y� + 4y = 3sin3t
18. y� - 2y� + 2y = 1 + e - t
19. y� + 4y� + 5y = 2cost
20. y� + 4y� - 32y = 1 + 2t
21. y� - y = 2et
22. Forced undamped oscillationsA4-kgblockhangsonaspringwithspringconstantk = 16N>m.ThesystemisdrivenbyanexternalforceofFext = 4cosvt.Assumenoinitialdisplacementandvelocityoftheblock,andnodamping.Graphthesolutionintwocases:v = 2.2andv = 4.Inwhichcasedoesthesolutionhavebeats?
23. Free damped oscillationsA0.2-kgblockhangsonaspringwithspringconstantk = 20N>m.Frictioninthesystemismod-eledwithadampingcoefficientofckg>s.Solveaninitialvalueproblemwiththefollowingvaluesofcandinitialconditionsy102 = 1,y�102 = 0.Grapheachsolutionandstatewhethertheproblemexhibitsunderdamping,overdamping,orcriticaldamping.
a. c = 3kg>sb. c = 4kg>sc. c = 5kg>s
24. Forced damped oscillationsA10-kgblockhangsfromaspringwithspringconstantk = 62.5N>m.Theblockoscillatesinafluidthatproducesresistancewithadampingconstantc = 40kg>s.Thesupportofthespringvibratesandproducesanexternalforce
T
T
T
M16_BRIG9324_01_SE_M16_05 pp2.indd 1233 23/07/12 11:19 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education

1234 Chapter 16 • Second-Order Differential Equations
ofFext = 10cos2t.Assumetheblockisinitiallyatrestattheequilibriumpositionandreleasedwithnovelocity.
a. Findandgraphthepositionoftheblockafteritisreleased.b. Identifythetransientandsteadystatesolutions,andgraph
themseparately.c. Afterapproximatelyhowmanysecondsdoesthetransient
solutionbecomenegligible?d. Findthepositionfunctionoftheblockusingatransferfunc-
tionandconfirmthatyoursolutionisconsistentwithpart(a).
25. An LCR circuitAnLCRcircuitconsistsofa10-ohmresistor,a0.1-henryinductor,anda1/240-faradcapacitorconnectedinse-riestoavariablevoltagesourcewithoutputE1t2 = 200sin60t.
a. Findthecurrentinthecircuit,assumingthatI102 = Q102 = 0.
b. Identifythetransientandsteady-statecurrents.c. Graphthesteady-state,transient,andtotalcurrent,fort Ú 0.d. Findthecurrentusingatransferfunctionandcheckforagree-
mentwithpart(a).
T
Chapter 16 Guided ProjectsApplicationsofthematerialinthischapterandrelatedtopicscanbefoundinthefollowingGuidedProjects.Foradditionalinformation,seethePreface.
• Oscillators
M16_BRIG9324_01_SE_M16_05 pp2.indd 1234 20/07/12 1:09 AM
For use ONLY at University of Toronto
Unless otherwise noted, all content on this page is copyright Pearson Education