8/12/2019 section 3.2 1-20-03
1/13
3.2 Moments in a Plane
As discussed in the last section, a rigid body has at most six
degrees-of-
freedom. Three of them are translational and three are
rotational. When the analysis iconfined to a plane, the rigid body
has at most three degrees-of-freedom. Two are
translational and one is rotational. These rigid bodies are
called planar rigid bodies.
planar rigid bodies, the forces act in the plane and momentsare
produced by these
forces. The forces and moments maintain the body in a state of
translational
equilibrium and rotational equilibrium. This section shows
several different ways how
to mathematically express a moment acting on a planar rigid
body. Then its shown
how to find the resultantmoment acting on a planar rigid
body.
.
The Moment of a Force
!igure " # $ shows point A and force F. The force acts at point
B. T
perpendicular distance between pointA and the line of action of
the force is denoted
a. The momentabout pointAproduced by the force is defined as the
product of t
forceF and the perpendicular distance a, written
%" # "& MA= aF.
The perpendicular distance a is called the moment arm.
Therefore, in words, 'q. %
"& states that the moment about point A produced by the
force F is equal to t
moment arm a multiplied by the force F.
As mentioned above, the analysis of a planar rigid body is
confined to a plan
The rigid body can translate in two independent directions and
rotate about an ax
perpendicular to the plane. To maintain a planar rigid body in
equilibrium, you need
maintain its translational equilibrium as well as its rotational
equilibrium. !orces te
to cause a rigid body to translate and moments tend to cause a
body to rotate. (o
statics problems, forces maintain a body in translational
equilibrium and mome
maintain a body in rotational equilibrium.
)otation in a plane is commonly referred to as about an axis.
(imilarly, t
moment about pointA is also said to be the moment about an axis
perpendicular thex
plane through pointA. In planar problems, the moment can be said
to be about a po
or about an axis.
The unit of moment in the (I system is Newtonmeter, abbreviated
*+m a
the unit of moment in the ( (ystem is poundft, abbreviated lbft.
Anotcommonly used word for moment is torque.
)efer again to !ig. " # $. *otice that momentMA is positive when
a andF
positive and when MA is positive that the moment tends to cause
the body to rot
aboutA counter-clocwise. Thus, the sense of the moment in !ig. "
# $ is said to
positive counter-clocwise. The sense of the moment could have
also been taen to
positive clocwise, as shown in !ig. " # . The sense of the
moment can be selected
be positive counter-clocwise or positive clocwise depending on
the convention th
you set up.
Moment about PointA
Moment !rm
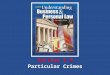
!igure " # /0 A visually pleasing and easilyrecogni1able
situation in which a moment is
being applied to an ob2ect.
34/
!igure " # $0 A moment at point A is produced
by a force F. The moment is defined as theforceFmultiplied by
the moment arm a.
!igure " # 0 The sense of the moment can be
positive counter-clocwise or positiveclocwise depending on the
convention that
you set up.
Torque
Moment about an !xis
8/12/2019 section 3.2 1-20-03
2/13
'quation %" # "& can be calculated several different ways.
In this sub-secti
three different, but similar, ways are shown. The next
sub-section shows how
calculate a moment using rectangular components of position and
force. )eferring
!ig. " # 5, the angle between the line of action of the force
and the line between poi
A andB is denoted by . The distance between points A andB is
denoted by r. T
moment arm is then related to the distance rby
%" # 6& a = r sin.
!rom 'qs. %" # "& and %" # 6&, the moment aboutAcan be
written as
%" # /& MA= r F sin.
'quation %" # 6& states that the moment aboutA produced by
the force F is equal
the distance r between pointsA andB multiplied by the force F
multiplied by t
sine of the angle between them.
*ext, notice that the component of the force perpendicular to
the line betwepointsA andBisf = F sin. Therefore, from 'q. %" #
/&,
%" # $& MA= r f.
'quation %" # $& is a third way of expressing a moment.
'quation %" # $& states that tmoment aboutA produced by the
force F is equal to the distance r between poin
A andB multiplied by the component of the force perpendicular to
r.
As an example, loo at !ig. " # 7. *otice that a force F = 899 lb
is bei
applied to the bar, " ft from pointA. The angle between lineAB
and the line of force
is "9
:
. The moment about pointA is calculated three ways in !ig. " #
7. The differways of calculating the moment are very similar.
Finding a Moment "sing #ectangular $omponents
Another way to calculate a moment is to first express the
position vector fro
point A to pointB and the force vector in terms of their
rectangular components.
shown in !ig. " # 89, the position vector and the force vector,
in terms of th
rectangular components, are
%" # & ,,; %iF%ir yxAB FFyx +=+=
where
%" # 5&
sin,cos
,sin,cos
FFFF
ryrx
yx ==
==
!rom !ig. " # 89, 'q. %" # /&, and using the trigonometric
ident
sincoscossin&sin% = , the moment aboutA is written out
as