-
5. Simulink
2.
: . . ., . .
-
5. Simulink
1553
. ., . .
..............................................................
1554
. . MATLAB/SIMULINK
.................................................................................
1561
. ., . ., . . MATLAB/SIMULINK .................... 1573
. . PSPICE
SIMULINK......................................................
1583
. ., . . MATLAB
SIMULINK......................................................................
1589
. . SIMULINK............................ 1596
. . SIMULINK-STATEFLOW
............................................................................
1603
. ., . ., . ., . ., . .
SIMULINK..............................................................
1608
. ., . . SIMULINK (
)............................................ 1611
. ., . . MATLAB/SIMULINK ............... 1634
. ., . ., . . SIMULINK.........................................
1653
. ., . . SIMULINK
.....................................................................................................
1661
-
II MATLAB
1554
519.6
-
. ., . .
, , e-mail: [email protected]
- () . , , - - - . - - - -.
, - , - [1]. , - - . , - .
[2], :
=+= + Tt
tmm
u dttItUT
TP0
0
)sin(sin1)(1
)2cos(sin2
cos2 0
++= ummmm TtT
TIUIU
, (1)
mU mI ; T - , , ( -); ; - ; 0t , .
, 3t -
-
5. Simulink
1555
+
+= Tt
tmm
u dtttIttUT
tTP0
0
])(sin[)](sin[1),( 3332 . (2)
0)2sin(sin 30 =++ ttTT uu , (3) (1) (2).
(3), :
2c
uOTnT = ; ( ...,3,2,1 =n ), (4)
cT - ( ),
ccuM TttTnT
2
22 03
+= ; ...),3,2,1,0( =n , (5) 0t ( ).
uOu TT = , (1), ! - , t 50 ( 20=cT ) . 1 . 2. , 0.01 0.02 -. ,
(4), (5) , - .
. 1. .
-
II MATLAB
1556
. 2. .
, - - MATLAB. - . 3 (. mes_p3 ). - - Simulink, Power System
Blockset DSP Blokset. : Power System Blockset, DSP Blokset. -
Simulink.
() RL-. (SI) (SU) Simulink DSP Blokset. - ( int1 int2 ) Hit
rossing - . Hit rossing Counter, - . 4. Hit ross-ing1 - .
Step. int3 - T . Produkt - T , Produkt1 - .
-
5. Simulink
1557
. 3. .
. 4. Counter.
-
II MATLAB
1558
Active & Reactive Power Power System Blockset.
. 5.
. 5. .
- , - . - , -. , . 6 - ( Zero-Order Hold) ( Quantizer).
. 6. .
. 7 . 8.
-
5. Simulink
1559
7. .
8. .
, - . ,
-
II MATLAB
1560
, 50 0.1% 10 ( - ) 8- , 8 . , [3], , 12- 12 - , 5- .
, :
1. - ( ) , - ;
2. - - ;
3. , , () .
- .
1. 13109-97 .
. . : - -, 1997. 30 .
2. . . . .: . 1973. 752 .
3. . ., . . - // . . .-. . . .: , 2001. .6871.
-
5. Simulink
1561
519.711:658.012.011.56:621.757
MATLAB/SIMULINK
. .
. . . , , e-mail: [email protected]
-
- - - . - , - - , - .
MATLAB (Math Works,Inc.) Simulink, - . - . , , .
-
, , - - . - -
-
II MATLAB
1562
-, . -.
- , - , . - [1]. , -, . .
(i = 0, 1, , p) (j = 1, 2, , s) - - , - (. 1), - {X10, X20, , X
s0} , {X1m, X2m, , Xsm}. - {ti1, ti2, , tij} .
- [2]. :
( )1
1 0
1i pj svp ji
j i vipj
X XK
= =
= =
= ,
, . - - , . - - .
-
5. Simulink
1563
. 1. . MATLAB Simulink
-
- , - , , . - - , - , - , - . - , .
, . - . - , - .
MATLAB Simulink , , .
-
II MATLAB
1564
Simulink, - [3].
(, , ) - -, . - , , , - . Simulink , - (). -, , , , . .
Simulink - -- . , , . - , - .
, , :
(, , ); , :
(, ). (, ).
- : (- ) (, , ). MATLAB/Simulink
Simulink MATLAB. S- , , - .
( ) Simulink. , - , ,
-
5. Simulink
1565
. . -, , , .
- - . 2. - - .
. 2. MATLAB/Simulink.
-
, (sub-system) , - .
- , - . -
-
II MATLAB
1566
, , . - , .
- , . , -, - (, , , -, , , , - ) , -, - .
, - - . - - , , - . - - .
. - , - .
- . , - - -. , -, - . - - -
-
5. Simulink
1567
. - () .
. - , , , - . - - . .
- . - , , , - () , .
- . - , - .
. - . , , , - - .
, - , - . - - , - - . -
-
II MATLAB
1568
-.
- . - -, (. 3).
. 3. .
- . - , .
.
, , : , - , . - , - (). Simulink/MATLAB . 4-6.
-
5. Simulink
1569
. 4. ( 0).
. 5. ( 1).
:
1) r = 0: 1
1
tgtgtgtgSH +=
2) r 0 r > S : ;8
2
rSH =
3) r 0 r < S : .)22
()(sin
sinsin 11
1
++=
tgtgrSH
SUB- - (. 6, 7).
-
II MATLAB
1570
. 6. ( 2).
. 7. ( 3).
-
. - - () .
, - (Ra ) , (Py) (R) -
-
5. Simulink
1571
. (Ra ) R . Ra. - , , , , 1,11,2 1,52 . :
2
2
110a a
sR RR= .
Simulink/MATLAB - . 8-10.
.8. ( 0).
. 9. ( 1)
-
II MATLAB
1572
. 10. ( 2).
S- -, . -, , - .
- - .
1. -
/ . . , . . , . . . / . . . . .: - , 2000.
2. . ., . . - - . / . 2002. 2. .6771.
3. . . MATLAB. : , 2001.
-
5. Simulink
1573
62.50
MATLAB/SIMULINK
. ., . ., . .
- , , e-mail: [email protected]
-
- -. , : -. , , - (Maple, Mathematica, MATLAB, MatCad .). , - ,
- .
- MATLAB - Control Toolbox - Simulink, -.
-, - , . - .
Simulink 200 , , - Simulink . Simulink Simulink (S)-.
-
II MATLAB
1574
, ( ) - MATLAB/Simulink.
1.
, M , ( ) ( ) ( ) ( , , ) ( )i i i i i i ix A x t B u t x u t t
= + + + , Mi ,...,1= , , - . ),,( tuxi - , )(ti - -.
)(),...,(),...,(1 tututu Mi , :
( )dttuxtutxxtxJ fo
dxf
t
tRdQtdQf ++++= ),,()()()()(2 222 11 .
-- [1] c (.1), - [2]. - : -
]'',',','[ ux , ; - .
-
5. Simulink
1575
, l=1
)(),(),(),( 00
_0
_0 tutxtutx
11 ++ = ll ze
-
II MATLAB
1576
MATLAB, - Simulink , : Simulink . , Simulink- () - - .
, [3,4,5] , , ( )f t )(tx - )(tu -, . - Simulink c , - - , S-,
.
2.
:
)(tuki - , - , - ;
)(txi )(tui -;
; -
. -
Simulink-, . MATLAB-, -, Simulink- -, .
-
5. Simulink
1577
: A - , B , P - )(tPFull , dR , xdQ1 , udxd QQ 22 , , ( ), ftt
,0 , - 0x , e , 0000 ,,, ux .
)(tx )(tu .
. 2 , .
. 2. .
-
II MATLAB
1578
Simulink- fithModel.mdl xithModel.mdl MATLAB S- .
fith.dll xith.dll S- , - Simulink-, ( )kiu t ( )if t , ( )ix t (
)iu t .
S- - c - , Simulink: Simulink-, - , , Simulink-, Simulink-,
.
S- - .3. .
mdlInitializeSizes
mdlInitializeSampleTimes
mdlInitializeConditions
mdlOutputs
mdlUpdate
mdlTerminate
. 3. S- .
mdlInitializeSizes() :
(, , , -
-
5. Simulink
1579
, , , - ); ( ); ( ); ; - , .
mdlInitializeSampleTimes() - ( ).
mdlInitializeConditions() ( , - ( )if t , ). , .
, , - . - mdlOutputs() mdlUpdate(), - -. mdlTerminate(), - .
S- Simulink- (), - .
. 4, Simulink- - .
( ), ( ), ( ), ( )t x t t u t , . ( )if t , ( )
iku t .
MATLAB. .
, (. 4, ), , ( )ix t ( )iu t .
. 5 Simulink- - - Simulink. , , - - .
-
II MATLAB
1580
) )
.4. Simulink- () i-
() ().
. 5. Simulink- Simulink.
-
5. Simulink
1581
. - , S-. . . 6 ( . 6, , . 6, - ).
) )
.6. : (), ().
-
- - ( ).
- - , MATLAB.
1. . . - -
. // -. 7. 2001. .148157.
2. Lychenko, Nataly M.. Decomposition-coordinated optimization
of large-scale discrete systems with parallel-sequential
coordinated scheme. // Proc. of The
),,( tuxP ii
),,( tuxi
iiP
i
-
II MATLAB
1582
7th Mediterranean Conference on Control & Automation (MED99,
Haifa, Is-rael, June 27-July 4,1999). Haifa, 1999. P.420429.
3. . . . // . 1. 2002. C.1017.
4. . ., . . - // . 1. 2002. C.4248.
5. .. C // . II . . SICPRO'03. .: , 2003. C.693706.
-
5. Simulink
1583
519.6
PSPICE SIMULINK
. . , -,
e-mail:[email protected]
- MATLAB .
http://www.mathworks.com/support/books/index_by_category.html?category=1
http://www.exponenta.ru/soft/MATLAB/MATLAB_book.asp.
, [1,2] , , , , , PSPICE ( HSPICE, SABER) [3]. ( - 1000$) , ,
Tina Pro, Elektronics Workbench, Circuit Maker , - . - , Tina Pro ,
, [4].
, 15 [5].
, , - - . 1.
. 1 Uc(t) (t-) - f : Uc(t) = A(t)sin(2ft). (1)
(IOP) - (). , L - C, , , - .
-
II MATLAB
1584
-
+ IOP1
L1R1C1
R2
R3
R4
V+
VM2V+
VM1
VG1
Uc
.1. .
Tina Pro , . 2. .3.
. 2. .
-
5. Simulink
1585
. 3.
.1 ( , - VM1 ( ) VM2 ( )) - .
. 4. . 1.
-
30 , .
, Elektronics Workbench. - -
-
II MATLAB
1586
Elektronics Workbench. - : Uc = Acos(2Ft) sin(2ft) , = 5, =400.
( 2)
. 5, , .
. 5. () () 2.
. 5 , 2 -
(15) - ( ).
- Simulink. - . 1 Gain Transfer Fcn, - Transfer Fcn1 Saturation.
- , Gain ( Algebraic Loop), .
. 6. Simulink .
-
5. Simulink
1587
- , MATLAB, - (. 7). Linear analysis Tools (.8) .
. 7. ( , , ).
. 8. Simulink .
- , . ( , , , , - 10000) , , -:
-
II MATLAB
1588
, - ,
- ,
.
, - . MATLAB Simulink - , .
1. Steven T. Karris. Circuit Analysis II with MATLAB
Applications. Or-
chard Publications., 2003. 501 p. 2. Attia, John Okyere. MATLAB
Fundamentals. Electronics and Circuit Analy-
sis using MATLAB / Ed. John Okyere. Attia Boca Raton: CRC Press
LLC, 1999. 399p.
3. Steven M. Sandler. The SPICE Handbook of 50 Basic Circuits
http://www.pcbcafe.com/BOOKS/SpiceHandBook/.
4. . . -
5. . . . .. 905846 6 17.02.82.
-
5. Simulink
1589
519.711:658.012.011.56:621.757
MATLAB SIMULINK
. ., . .
. . . , ,
e-mail: [email protected]
-
, , , , - -. - - , - , -, , - - .
- - . , , , , , , - .
MATLAB Simulink - - [1]. MATLAB Simulink - , . - [2].
-
II MATLAB
1590
, -
. , , - - , - , , . - - .
- , . - , . - . . - , .
- ( -). , - - , . . , ( ). - - ( ). - , - , . , .
- , . - . -, , , -, . , . -
-
5. Simulink
1591
, . .
SUB-
, - (.1):
1. - .
2. ( , . .).
3. , ().
. 1. .
SUB- -, .
Simulink SUB-, [3], :
1. (t):
t X j i 2.
:
-
II MATLAB
1592
X j (i-1) X j i 3. -
: t X j i
4. :
X j (i-1) X j i 5. -
: S X j i
:
1. . 2. . MATLAB Simulink
- - : (. 2, 3); ,
() (. 4, 5).
. 2. .
-
5. Simulink
1593
. 3. .
. 4. .
-
II MATLAB
1594
. 5. .
, - . , . , , ( ) - , . .
, -. , - -. - , - ( ).
- - - . -, .
. -, , - .
-
5. Simulink
1595
, - . - :
1. , - -.
2. . 3. . 4. . 5. . 6. . 7. . -
, , . , - - , .
- - - , - , - , . 1. . . MATLAB. :
, 2001. 2. . ., . ., . .
: . .: . . . , 2002.
3. . ., . . - - // . 2002. 2. C.6771.
-
II MATLAB
1596
681.513.3: 519.711.3: 681.3.06
SIMULINK
. . , , .,
e-mail:[email protected]
, - , , , - ( ), - [1, 2].
:
1 ; p
dJ M Mdt i =
1 ; p
ddt i =
0 = | | < ( ) sign = | | ;
; d
M dt= +
0ddt = | | < d d
dt dt = | | ;
, dJ M Mdt = (1)
M M M k= ( ) M f= . : ddt -
; , J J ; , ; , M M
; , ddt
; ,
-
5. Simulink
1597
ddt -
; ; C - ; - , ; k ; pi ; M ; M ; M .
[2]:
( ) M M sign= 0 M M M + 0 = .
-, M .
0 = | | M M> -, - (1), - , , 0 =
( ). M M sign M= 0 = | | M M ,
, - M M M M + , M - M M= . - , | | M M> .
M M . -
, , , - .
, - .1, : 1,2,3 , ; C1, 2, ,8 ; 1, 2, 3 ; 1, 2, 3 ; 1, 2 ; 1, 2,
3 ; 1, 2, , 5 ; 1, 2, , 9 ; -.
-
II MATLAB
1598
1, 2, 3 6 - . , . 2 2, - 2, 2 1, 0. , - 2 - 3, - 2, 3 - 1, 0. 2
1 6.
4, 5, 7, 8 9 - . 1, b . 4, 5 7 AND, 8 NOR, 9 XOR.
. 1 - (0 1) b.
M , , 1, , , - 1 2. 2 , - . . , , , 2 . , - 1 1, , 1 - 0, , , 1,
, 2 .
1, 1 , 2 - M . M - 3, - M . - M M= .
-
5. Simulink
1599
1 1 2 2 3
1 1 1
1
1 1
C4
4
5 2
2 2 2 6 3
3
3
2 3
4
2
7 5
8 5 3 7
8
9
3 6
.1 - .
-
II MATLAB
1600
, - , 3 - 3, 3 - M M .
1.
b
(ND)
(NOR)
2 ( XOR )
0 0 0 1 0 0 1 0 0 1 1 0 0 0 1 1 1 1 0 0 . 2
, .
| | M M 0 = ( 1) | |M 2 M - 2, , | |M - M , 2 0, - 3 1.
3 - 3, 6 0.
7, 8 9 0, 1, 0. 4 5 0 0. 2, 4, 5 .
M c 3 8 + , - 8 . - 5 , 3 , - 3 0 = . ,
0M , . | |M M , .
2. 2 1, 3 0. 8 9, - 2, , 5
1 ( ) M M M sign M = , 3. 3 0 .
-
5. Simulink
1601
3 - , | | > , 6 1. - 2 ( 3) - 7, 8, 9, -, 1, 0, 0. 4
2 ( ) M M M sign = . - 4 5 0 0. - 2, 3 5 , , , 5 .
| | M M 0 ( 4) . 2 0, 3 1. - 7, 8 9 0, 0 1. - 5 1, , , - 5 2 ( )
M M M sign = , 5. 5 .
, , -.
2.
.
2 2 3 4 5 4 5 8 6 7 8 9
1 | | M M 0
0
1
0
0
0
0
1
0
2 | | M M> 0
1M
1
0
1
0
0
0
0
1
3 | | M M> 0
1
0
0
0
2M
1
1
0
0
4 | | M M 0
0
1
0
1
2M
1
0
0
1
. 2. .
-
II MATLAB
1602
. 2 .3 Simulink - MATLAB [3]. - - , - , .
.3. .
1. . 2- . .1 / . . . M.:
, 1976. 479 c. 2. . ., . . -
. .: , 1966. 767 c. 3. . , . SIMULINK 4. : .
. .:. , 2003. 403 .
-
5. Simulink
1603
681.3.06
SIMULINK-STATEFLOW
. .
, , e-mail:[email protected]
, -
-, . - - . - ( - ), - , - . - - , , - . , . - - , - .
, - . . . . , - , . , - .
, - , - . MATLAB TrueTime [1]. MATLAB - Simulink-, [2].
-
II MATLAB
1604
, , - Simulink Stateflow. - - , Stateflow Simulink. Simulink . -
, Stateflow . , - , - . - Stateflow- - - -.
- .
21( )
4W s
s= .
( ) 5W s s= + .
. 1, . 2.
. 1. .
-
5. Simulink
1605
. 2. .
, - Stateflow. (. 3).
. 3. .
1( ) 5 (1 ) /W z z h= + ,
h . Stateflow- - 4.
-
II MATLAB
1606
. 4. Stateflow- .
, - 0.2 0.08 . - , . - . 5. dout . . 6 0.2 .
= T dtI 0 2 , , . , - , I = 0.009985. - 0.2 I = 0.01032. - -
0.01061, - , .
-
5. Simulink
1607
. 5. .
. 6. . 1. Henriksson D., Cervin A., rzn K. E. TrueTime:
Simulation of control loops
under shared computer resources // Proc. of the 15th IFAC World
Congress on Automatic Control. Barcelona, Spain, July 2002.
2. . . Simulink: . .: -, 2003. 496 .
-
II MATLAB
1608
621.313.3:519.711.3
SIMULINK
. ., , ,
e-mail: [email protected] . ., . ., . ., . .
-, , e-mail: [email protected]
, -
Simulink, . [1], Memory. .
- (), () [3, 4], - , - - . ER, ES (. 1).
. 1. , .
-
5. Simulink
1609
ES ER , . U1 . Ke U1 [3].
. 1 , Gain1, S-Function2 Product3.
S- s_v121 - ; Ksootv, Rzaz, Ryarm - , m-. Command Window . -
.
ES ER (. 2), -: , - . , Memory ( - ).
. 2. .
MATLAB function, ES ER, - . , . -, ( ).
-
II MATLAB
1610
.
. - . - , , Mathcad m-script [3, 4], Simulink [2].
, , - . - - , .
, [2], -, . , , , .
- - Simulink.
, MATLAB, , - , .
1. . ., . . Simulink 4. : . .
. . . .: . , 2003. 2. . ., . ., . -
. , 2000. 3. . ., . ., . . -
. .: , 1991. 4. . ., . ., .
: . : - -, 2001.
-
5. Simulink
1611
534:531.43
SIMULINK ( )
. .,
() , ,
e-mail: [email protected] . .
Institute for Control Engineering of Machine Tools and
Manufacturing Units (ISW) Stuttgart, Germany,
e-mail: [email protected]
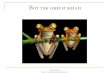
1. -
( m) (. 1).
. 1. .
- () (. 2, ).
. 2. .
(. 2, ), - [1] ( ).
-
II MATLAB
1612
( . . [2], , - , ). ( ). - . - , , - , .
, , , - ( 10-7 ) . , - . - .
. , , ( - ). , , .
- () , . . , . - , - [3]. - , , - ( ). - .
- ( ) . - , - :
, - ;
-
5. Simulink
1613
( , , );
( ) - ;
, , (-, -), .
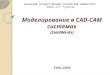
. - (Leonardo Da Vinci, 1519). - (Newton, 1687). (Amontons,
1699) - (Coulomb, 1785). - . . . 3, ).
.3. : ) ; ) ++ ;
) ; ) +.
-
II MATLAB
1614
(Morin, 1833) , (Reynolds, 1866) , , . 3, ). - . , XIX - (), ()
. XX - (Stribeck, 1902), ( , . 3, ). . (Hess, Soom, 1990) [4] . , -
, , -, , (.3, ). - .
.. , .. , .. , .. , .. , .. , .. , .. , .. . - .. [5] .. - ..
[6], , , . , - . , [1] - . . (1988), . . ( 1986), . . (1956, 1957,
1967, 1980) ( . ., . ., . ., . .), . ., . ., . . (1967), . ., . .
(1987), . ., . . (1988). , [7] .
, , , , - , . [8] , (. 4). [15] - .
- . () , , , . , - , . 3 ), ), ), , .
-
5. Simulink
1615
- [1] [9] B. Armstrong-Hlouvry, P. Dupont, Canudas De Wit, H.
Olsson, K. J. strm, P. Lischinsky. - : Bliman Sorine, Harnoy -
Friedland, Canudas de Wit .
. 4. .
, , , , - , - . 1967 . .. - . , - , , , - , , .
, , . , - , (, ). - ( ), -, .
2. ( )
()
. .
-
II MATLAB
1616
2.1.
( ) ,y sign x k= (1) y F ( ) , x , k , - . , . -, .
(. 5). Sign Simulink. - , -, , -, . - k.
. 5. .
, . - 1 /. - . 6. .
. 6. .
-
5. Simulink
1617
, . 5, -, . 7.
)
)
. 7. : ) k=1; ) k=2.
, -
(1) . 2.2. +
-
1 2( ) ( ),y sign x k x k= + (2) y , x , k1 -, k2 .
+ - Simulink Coulomb & Viscous Friction (. 8), (2).
-
II MATLAB
1618
v
To Workspace1
F
To WorkspaceSine Wave Coulomb &Viscous Friction
. 8. + .
,
Coulomb friction value (Offset) , Coefficient of viscous
friction (Gain) . . 9 .
. 9. +
. . . - . 2.3.
-
, , 90- , - . , - (Lorentzian) (Haussian) , (Tustin). , , [6],
[10], [11].
-
5. Simulink
1619
[10] :
2 2 21
CM C signm
= + + , (3)
m -, , 2 , - - . , . 10.
. 10. (3).
(3) (. 11).
. 11. (3).
Switch.
. 11 (. 12) (. 13).
-
II MATLAB
1620
. 12. (3).
. 13. (3).
, (3) . . . - - , . . . .
, [11]. -
01v
vG HF F F e b v
++ + + + = + ,
-
01v
vG HF F F e b v
= + .
. 14.
-
5. Simulink
1621
. 14. [11].
, . 15, , , . 16.
. 15. [11] .
. 16. [11].
. 16 , ( , ). - : , - , . - , -, .
-
II MATLAB
1622
.
. 17. [11] .
FH , -
F (FH-F ), 0 (- ) , , b , , . - .
[11] - . :
FH+=1,79 H, F+=0,97 H, 0+=0,003915 /c, b+=0 Hc/, FH-=-1,63 H,
F-=-0,84 H, 0-=-0,003915 /c, b-=0 / .
. 15 . . 18.
. 18. [11] .
, , , , sgn, - [12]. -
-
5. Simulink
1623
-
( ) ( )( ) ( )2/ 2sgnSSS C S CF F F F e = + + , FC , FS , 2 - ,
S ( ). , . - .
3. ( )
(), - , .
- , - , . - [12].
, [9], (Dahl, 1968). [13] , Bo Pavelescu (1982),
Armstrong-Helouvry (1991), Harnoy Friedland (1994), Canudas de Wit,
Olsson, Astrm Lischinsky (1995).
Bo Pavelescu , - (dxS /dt ) (. . 25 [13]): ( )
. .. .
( )Sx x
C S CF x F F F e F x
= + + . FC, FS, Sx
. ,
. 3.1.
-
[14] (o [9] (K.J. strm) (C. Canudas de Wit P. Lischinsky), LuGre
Lund-Grenoble):
-
II MATLAB
1624
0 1 2 ,dzF zdt
= + + (4)
,( )
dz zdt g
= (5) ( )20 ( ) ( ) .sC S Cg F F F e
= + (6) : F , , z , - , - , 0 - , - -, 1 , , 2 , FC , FS , S . ,
-.
(4)(6) , . 19.
. 19. .
1/g(v) . 20.
. 20. 1/g(v).
-
5. Simulink
1625
, - [9]. [9] , , (4) (6), , , , - - . - .
[9] . , 1.425 , 95% FS. 1.425 , 1.425 , 1.425 . -. , . 19. , - ,
. 21. - . 22.
. 21. .
F(x) , [9]. , , , . F() , , . (Dahl, 1968). Fa > F, - .
, . , . . . . 23, ) , - . 23, ).
-
II MATLAB
1626
=0.0007 / , 0.001 /. , . : 1 = 1 /, 2 = 10 / 3 = 25 /, , -
[5].
. 22. .
) )
. 23. .
-
, . . . , =0.08 /, 1 = 10 / 2 = 20 /. 24.
-
5. Simulink
1627
. 24.
: , , . . - .
- - , - [9]: . - , - ( ) , -. , . 25, ). - Fa: 1 /c, 5 /c, 15 /c
50 /c. , - , . 25, )
, - , , (. . ) . ; FC = 1 .
-
II MATLAB
1628
) )
. 25. .
3.2. -
-
, . - ( , - Leuven).
- [16] , - , . . , , -, , , - . , - .
- , . 26. , , Fa, - FS, , (. 26, ). - (. 26, ), (. 26, ) - (.
26, ). , , , - , - , .
, , , - . [17] , - , , - -
-
5. Simulink
1629
. , - - - , .
) )
) ) . 26. .
4.
-
[18] - [12], [19]. - (ISW), (. 27). ISW, G. Pritschow, - , ,
[20], [21]. - dSPACE RTW MATLAB/Simulink Td = 125 s.
-
II MATLAB
1630
. 27. (ISW).
- - , fft. . 28. . 28, - - (f1 = 117 Hz, D1 = 0.055, f2 = 349
Hz, - D2 = 0.05) . - - . 29.
- . , .
. 30 , - -: l lC CF F+ = = 1.6 , l lS SF F+ = = 1.85 , S+ =
0.004 /,
S = 0.005 /, 2+ = 17 /, 2 = 8 /.
( ) . 31.
-
5. Simulink
1631
. 28. .
. 29. ().
. 30. ().
. 31.
( ).
-
II MATLAB
1632
- . , , . -, - . , - . . 1. Armstrong-Hlouvry B., Dupont P.,
Canudas De Wit C. A survey of models,
analysis tools and compensation methods for the control of
machines with friction // Automatica. 1994. V.30. N.7.
P.10831138.
2. . . - // . 2000. 7. .4454.
3. . . - // . 2000. 7. .1113.
4. Hess D. P., Soom A. Friction at a lubricated line contact
operating at oscillat-ing sliding velocities // J. Tribology. 1990.
V.112. P.147152.
5. . . . .: . . -, 1979. 246 .
6. . ., . . . . -, 1987. 183 .
7. . . . --: , 2000. 293 .
8. Kozlowski K. R., Dutkiewicz P. Experimental identification of
robot and load dynamics // IFAC 13th Triennial World Congress. San
Francisco, 1996. P.397402.
9. Canudas De Wit ., Olsson H., strm K. J., Lischinsky P. A new
model for control of systems with friction // IEEE Transactions on
Automatic Con-trol. 1995. V.40. N.3. P.419424.
10. / . .. , . 3. .: , 1967. 770 .
11. Kern R. H., Gao C.-T., Nitsche R. Reibkraftkompensation
mittels Fuzzy-Logik // Automatisierungstechnischepraxis. 1995.
V.37. P.5060.
12. . ., . . // . -. . SICPRO2003. .: , 2003. . 18211849 (CD
ISBN 5-201-14948-0).
-
5. Simulink
1633
13. Armstrong B. Challendges to Systematically Engineered
Friction Compensa-tion // Proc. of IFAC Workshop on Motion Control.
Munich. 1995. P.2130.
14. Canudas-De-Wit . Comments on A New Model for Control of
Systems with Friction // IEEE Transactions on Automatic Control.
1998. V.43. N.8. P.11891190.
15. . . // - ( . .). 1999. 2. .226228.
16. Dupont P., Hayward V., Armstrong B., Altpeter F. Single
state elasto-plastic friction models // IEEE Transactions on
Automatic Control. V.47. N.5. May 2002. P.787792.
17. Swevers J., Al-Bender F., Ganseman C.G., Prajogo T. An
integrated friction model structure with improved presliding
behavior for accurate friction com-pensation // IEEE Transactions
on Automatic Control. V.45. N.4. April 2000. P.675686.
18. . , .. - // . . . SICPRO2004. .: , 2004. .571588 (CD ISBN
5-201-14966-9).
19. . . - // . . . SICPRO2000. .: ..16961709(CD ISBN
5-201-09605-0).
20. Pritschow G., Ketterer G. Rechnergestuetzte Identifikation
von Reibkennlinien an elastisch gekoppelten Bewegungsachsen //
Antriebstechnik. 1993. V.32. N.9. P.6772.
21. Augsten G., Schmid D. Einfluss von Spiel und Reibung auf die
Konturfehler bahngesteuerter Werkzeugmaschinen //
Steuerungstechnik. 1969. V.2. N.3. P.103108.
-
II MATLAB
1634
004
MATLAB/SIMULINK
. ., . . , ,
e-mail:[email protected]
Excel , , . , -. , .
MATLAB. - (Toolboxes) . - FinancialToolbox, Excel ExcelLink,
Word Notebook.
Simulink, . - . . - , . , - .
Simulink. - . 1. ,
. , - . , - . , - , .
: . : . : - ,
-
5. Simulink
1635
. - , .
- .
. - , . .
(, , ).
. , - , . - - . , . - : , -.
.
: t=tf BDt = PRFt * TXRT, t=tb
BDt , - t, .; PRFt (profit), t, /.; TXRT (tax rate); t , . , ;
tb (begin) - ; tf (final) .
t=tf CPt = PRFt * (1TXRT), t=tb
t PRFt = CPt * RN,
RN . , .
Simulink. Simulink- -, . , - .
-
II MATLAB
1636
. . 1.1.
. 1.1. .
, . CapF. , . , . CapS.
( ) PrfF Rntb.
- Rntb. [0.2:0.2:0:8]. MATLAB , - 20% 20% 80%. - MATLAB.
Scope1 - CapS.
( ) - TaxRate. - TxF.
-
5. Simulink
1637
TaxRate. [0:0.1:1:0]. , - 0% 10% 100%. - MATLAB.
. - TxF BdjS. Scope . Display BdjS.
- , - .
, . : - , , -.
. - Scope Display.
--: . . , . %Optimal profit tax rate simulation %File:
C:\Csr_MtLb\TxRt\TaxRate_DscM.m and TaxRate_Dsc.mdl
%=================================================
path(path,'C:\Csr_MtLb\TxRt') %Set model Path
%=================================================
open_system('TaxRate_Dsc') %Load TaxRate_Dsc.mdl
TaxRate=[0:0.05:0.7] %- for Rntb = 0.2:0.2:1 % - sim('TaxRate_Dsc')
%Run model plot(TaxRate, ScopeData(end,2:end)) % hold on % grid %
end hold off % %======= end TaxRate_DscM.m program ===============
m- -. .
-
II MATLAB
1638
-. .m- - Simulink - Simulink .mdl.
. open_system
. TaxRate -
. 8 14 for -
. sim -
, -.
plot . 1.3, (work space) MATLAB, - Scope. hold on - , - .
. . 1.2.
. 1.2. -.
-
5. Simulink
1639
- m- . Simulink . Scope - () . - , - plot MATLAB.
1. . - .
Simulation, Scope - : , - . .
, . , . . - . - : -, - .
2. . - - . -, . . .
MATLAB TaxRate_DscM.m. . . Tools > Run. MATLAB - - , .
1.3.
. , . - ( ), , , , 23%.
-
II MATLAB
1640
. 1.3. - .
,
, - . , - . . , , - . , - .
2.
.
(18421924) , . - . , 80 - OPEC, , .
. , , . -
-
5. Simulink
1641
, , . , , MATLAB_Simulink.
. - . : , -, .
. : , , , . . - , . . -. , . : .
. - : , , , .
Dmd=D0 Kd*Prc, Dmd (demand) ; D0 ; Kd ; Prc (price) .
Spl=S0+Ks*Prc,
Spl (supply) ; S0 - ; Ks ; Prc (price) .
Simulink. - - . 2.1.
. 2.1. - .
-
II MATLAB
1642
-, . DmdFn. , . :
u = Prc, D0 = 100, Kd = 10. . -
SplFn. - , .
: u = Prc, S0 = 10, Ks = 7.
. Spl, .
SplFn1 - . , - . Prc, Spl . DmdFn.
. . -
. - Scope. - . , - . , - .
. , . - MATLAB - . - . - , . . -.
MATLAB. - MATLAB. %Market equlibrim price simulation %File:
C:\Csr_MtLb\DmdSplEquM.m %1.Simulate static functions, plot its
%2.Simulate price dynamic, plot price Web graphics
-
5. Simulink
1643
%================================================= %Set model
Path path(path,'C:\Csr_MtLb\MrktEqlPrc')
%================================================= %1.Simulate
static functions, plot its %Load and Run DmdSplEqu.mdl
open_system('DmdSplEqu') sim('DmdSplEqu')%Write Vars into WS from
Scope %Plot Static features plot(ScopeData(:,2),ScopeData(:,3:4))
hold on grid pause(5)% %
%================================================= %2.Simulate
price dynamic sim('DmdSplEqu')
%================================================= %3. plot price
Web graphics for i = 2:11 % line([ScopeData(i-1,2)
ScopeData(i,2)],[ScopeData(i,4) ScopeData(i,4)])
line([ScopeData(i,2) ScopeData(i,2)],[ScopeData(i,4)
ScopeData(i+1,4)]) end hold off
%=================================================
. % - . path - . open system - - Simulink.
sim . Plot . Hold on . Grid . -. pause 5 - .
. Sim . . Scopes MATLAB workspace.
for, , - .
. 2.2.
-
II MATLAB
1644
. 2.2. - .
/ MATLAB c -
. Simulink. Scope, Scope1 , - . - , MATLAB.
1. -. MATLAB m- DmdSplEquM.m. . Tools>Run. . Simulink . Scope
Figure. Scope1 . 2.3.
Scope . 2.4.
-
5. Simulink
1645
. 2.3. , - .
. 2.4. , Scope.
- . 2.5.
-
II MATLAB
1646
. 2.5. .
2. - . D0 DmdFn SplFn1 .
S0 SplFn .
3. - . - Kd DmdFn SplFn1 .
- Ks SplFn .
Ks . Ks = Kd . . - , . . . Ks > Kd , , - . -, .
-
5. Simulink
1647
3.
. - . . , , .
- , - . , . - - .
, 1962 -, . - . , . , 300 , 10 . : , , -, , , .
. .
. - - .
. Simulink - , . - Simulink . 3.1.
. 3.1. .
-
II MATLAB
1648
70 , , - 5-10 . , - .
. (-) NeedPrk ( ). - , : - ( Prdct), c InPrk ( ). OutPrk ( ,
).
- , RealPrk ( -, ). - - urDmd. Saturation () , - : urDmd >=
0.
- . , - , ( ).
. - Scope , . - , -, . . 3.2.
. .
. 3.3.
-
5. Simulink
1649
. 3.2. Simulink Scope.
. 3.3. .
-
II MATLAB
1650
Simulink. . Scope1. MATLAB. Scope.
1. . - MATLAB . Simulink ParkPrdct.mdl.
Simulation>start. Scope - , - . 3.4 3.5.
. 3.4. , , Scope1.
-
5. Simulink
1651
. 3.5. , , Scope.
- . , , -. , . . , - , . . , -, .
2. - . , , -. - , . . -, , . , - . , , . . .
3. - . - - .
- , -
-
II MATLAB
1652
. , . - , . . , -, .
-, - , -, . . .
1. . . .
.: -,1996. 2. ., . . .: , 1992. 3. . . . MATLAB_Simulink -
. .: , 2001. 4. . . .
.: , 2002. 5. . . . .
.: -, 2002. 6. . . . . .: , 1997.
-
5. Simulink
1653
613.314
SIMULINK
. ., . .,
, , e-mail:[email protected], [email protected]
. . (), ,
e-mail: [email protected] -
: OrCad, Micro Cap, Electronic Work Bench . . , , , - - . - , ,
. , -, , , ( - -, . .). , . , -. - , - .
Simulink MATLAB Sim Power System (SPS) - . SPS - , - . , . Sim
Power System, ( -) Simulink.
-
II MATLAB
1654
- -. , ( ) , ( ). , - , , , - - . , - 1000 50, 210-5 . , - 10100
, , - : 0.010.001 c. - , 50-500 , .
- . - :
1. . 2. - . -.
3. , .
4. - . .
5. - .
6. - .
7. .
8. . 2 .
-
5. Simulink
1655
, - . ( ) .
. 1.
.1. .
Electro, Teplo. Pulse Generator , . - ( Electro), ( Teplo). Step
Control Subsystem - - . - . 2.
.2. .
-
II MATLAB
1656
Product - . , , , -. , , - . Timer , , - . ( ) Step Switch. Step
Switch (. 3) Constant , S-function - . . 3 - .
.3. .
S-function - : set_param(_,'maxstep',num2str(u) ), set_param - ,
_ Simulink-, maxstep ( ), u .
S- : function
[sys,x0,str,ts]=Set_Max_Step_Size(t,x,u,flag,m_name) % switch flag,
case 0, [sys,x0,str,ts]=mdlInitializeSizes(m_name); case 3,
sys=mdlOutputs(t,x,u,m_name); case {1,2,4,9} sys=[]; otherwise
error(['Unhandled flag = ',num2str(flag)]); end % function
[sys,x0,str,ts]=mdlInitializeSizes(m_name) %
-
5. Simulink
1657
sizes = simsizes; sizes.NumContStates = 0; sizes.NumDiscStates =
0; sizes.NumOutputs = 0; sizes.NumInputs = 1; sizes.DirFeedthrough
= 1; sizes.NumSampleTimes = 1; sys = simsizes(sizes); % x0 = [];
str = []; ts = [-1]; % function sys=mdlOutputs(t,x,u,m_name) %
set_param( m_name,'maxstep',num2str(u) ); % sys=[];
S- m_name - . S- [1].
, - . , , .
. 4.
, . , - R_variable, , - . - (. 5).
-: ( - ), - . T_In . - - . , .
-
II MATLAB
1658
. 4. .
. 5. .
(. 6) - , - . , - .
-
5. Simulink
1659
. 6. .
. 7 - .
. 7. .
. 7, , , . . ,
-
II MATLAB
1660
- . - .
1. . . Simulink. .
M.: -, 2004. 496 .
-
5. Simulink
1661
621.878.25
SIMULINK
. ., . . - ,
e-mail: [email protected]
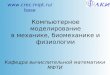
() () . , , - , . - , , [6].
[2] - (. 1): - , , - , , (), , () .
P10
P1 P2 P3 P4
P5
P6 P7
P8 P9 P11
P12
P13 P14 P15
P16 P17 P18
. 1. - .
Pi. (P1), (P2),
-
II MATLAB
1662
(P11), ( -, ). , -, (P6), , - (P5) (). , - (3), - (4) (7). (8)
(14) (15), (10) , , , . - (11) (16).
() - (17) (10). - (18), (12) (13), - [7].
, -, , - .
, [1]:
+= ll ll sineAeA)(R ||2||12y 21 , (1)
-; 1, 2 ; 1, 2 - ; .
(1) [1]: y(n) = a01x(n) + b11y(n-1) + a02x(n) + a12x(n-1) +
b12y(n-1) + b22y(n-2), (2) 01, 02, 12, b11, b12, b22 [1].
:
+=
=km
kmnc
)n(yM1)m(y , (3)
k = 0,5(Mc 1); Mc ; y(n) - .
, -, , : ;
1pTpTkpk
)p(y)p(yW
y22
y1
y2y1
1
yy
1
+++==
(4)
-
5. Simulink
1663
;1pTpT
kpk)p(y)p(yW
y22
y1
y4y3
2
yy
2
+++==
(5)
,1pTpT
k)p(F)p(yW
y22
y1
y5
Fy
++== (6)
y1, y2 ; F ; kiy, Tiy - , .
:
;1pTpT
kpk)p(y)p(W
22
1
21
1
y1
+++==
(7)
;1pTpT
kpk)p(y)p(W
22
1
43
2
y2
+++==
(8)
,1pTpT
k)p(M
)p(W2
21
5
F
M F
++==
(9)
F , , - .
, - :
( ) ,eke1p
kk
)p(y)p(y
)p(W p3p2
1
y
+== (10)
y - ; y - ; ki , - ; . ( ),tankyy += (11) k . k = L / 2, (12) L
.
h, , y.
( F F ) , - , - [6].
-
II MATLAB
1664
, [4]:
,MMdt
dJ f23 +++= (13)
; J3 ; f ; , - ; , ; 2 - . f = k Pf (v); (14) = k F; (15) = k
sin (); (16) v = k 1, (17) Pf(v) - ; ; ; , ; 1 . k = r / i, (18) r
; i -.
[6]:
,kdt
dJ 112 += (19) , ; J2 ; k , - .
, - [7]:
( ) ( )( )
>+
+==,
1pC
;1p
C
pppW
1
(20)
, , ; , - ; .
() [5]:
( ) ( ) ( ) ;p1pek
)p(UpLpW
p1
1
+== (21)
-
5. Simulink
1665
( ) ( ) ,1p
ek)p(UpMpW
p2
2
+== (22)
L ; - , ; U ; k1 , - ; k2 , ; , ; .
- (. 2), (2) (22), - .
- , - , ( , - .), -. , - , - . ( ), , , [3, 7].
. - , - ( - ). - , - , . , .
: ( ) - ( ), - , , .
-
II MATLAB
1666
d dt
k1yp + k2y
1 T1yp2 + T2yp + 1
?y1
?y2
F
y k3yp + k4y
k5y
-
v
k1p + ky
1 T1yp2 + T2yp + 1
k3p + k4
k5 MF t
MF
h F
k1
k2
e-p
k3 e-p
?y
tan
k
y
y t
F
h
F
F
v
h
k
k
Pf =f(v)
v
f
k
J3
2
k v 2
2
1
C Tp + 1
d dt J2
k
1
e-p 1 Tp + 1
k1 p
U
L
h h
h k2
h
sin
M
C Tp + 1
. 2. .
-
, . 3. - b1 b2 ( ) (b1 b2), . - c - , .
U
1
1
b1 b2
. 3. : b1 ; b2 -
; .
-
5. Simulink
1667
, , h , - .
- Simulink. - , , .
, -, .
1. . . -
- / . . . , -. : , 2004. . 1. .1. .152158.
2. . . // - , , , : . .-. . . 2. : - , 2003. .250253.
3. . ., . . . .: , 1979. 280 .
4. . . . .: , 1980. 215 .
5. . . - : . . . . , , 1997. 172 .
6. . ., . . - // . . . 4. . : - , 2003. .7275.
7. . ., . . - // , : . .-. . : - , 2004. .219220.