Embed Size (px)
Citation preview

Medical ImageAnalysis (1996)volume1, number1, pp19–34c
�OxfordUniversityPress
Segmentationof 2-D and 3-D objectsfr om MRI volumedata usingconstrainedelasticdeformations of flexible Fourier contour andsurfacemodels
G´�
abor� Szek� ely� , Andras� Kelemen,ChristianBrechbuhler� andGuidoGerig
CommunicationTechnologyLaboratory, ETH-Zentrum,CH-8092Zurich,Switzerland
AbstractThispaperdescribesanew model-basedsegmentationtechniquecombiningdesirablepropertiesof physicalmodels(snakes), shaperepresentationby Fourier parametrization,and modellingof naturalshapevariability. Flexible parametricshapemodelsarerepresentedby a parametervectordescribingthemeancontourandby a setof eig� enmodesof theparameters characterizing�the shapevariation. Usually the segmentationprocessis divided into an initial placementofthe meanmodelandan elasticdeformationrestrictedto the modelvariability. This, however,leadsto aseparationof biologicalvariationdueto aglobalsimilarity transformfrom small-scaleshapechangesoriginatingfrom elasticdeformationsof thenormalized� modelcontoursonly. Theperformancecanbe considerablyimproved by building shapemodelsnormalizedwith respectto a small setof stablelandmarks(AC-PCin our application)andby explaining the remainingvariability amongaseriesof imageswith themodelflexibility . Thisway theimageinterpretationis solved by a ne� w coarse-to-finesegmentationprocedure based
on the set of deformation
eigenmodes,makinga separateinitialization stepunnecessary. Although straightforward, theextensionto 3-D is severely impededby difficulties arisingduring the generationof a propersurfaceparametrizationfor arbitraryobjectswith sphericaltopology. Weapplyanewly developedsurfaceparametrizationwhichachievesauniformmappingbetweenobjectsurfaceandparameterspace.The 3-D procedureis demonstratedby segmentingdeepstructuresof the humanbrainfrom MR volumedata.
Keywords: 3-D deformablemodels, 3-D shapeanalysis,segmentationof multidimensionalimages,statisticalanalysisof anatomicalobjects
Received�
October3, 1995;revisedJanuary12,1996;acceptedJanuary19,1996
1. INTRODUCTION
Segmentationof anatomicalobjectsfrom large 3-D medicaldatasets,which result for example from routine magneticresonanceimaging(MRI) examinations,representsoneof thebasicproblemsof medicalimageanalysis. In somelimitedapplications,segmentationcould be achieved by minimaluserinteraction,providing proceduresfor the interpretationof medical scenes,which can be applied routinely (Geriget al., 1991). For generalapplications,however, adequatesegmentationcannotbe obtainedwithout expert knowledge,
�Corresponding
author
(e-mail: [email protected])
requiringtediousmanualinteractionby ahumanspecialist.Elastically�
deformablemodels(snakes)(Kasset� al.,� 1988)have beenproposedas tools for supportingmanualobjectdelineation. While suchprocedurescan be extendedto 3-D (Terzopouloset al., 1988; Cohen et al.,� 1992), theirinitialization becomesdifficult. Most often, the initial guessmust be very close to the sought contour to guaranteeasuccessfulresult (Neuenschwander et al., 1994). Whilea careful and time-consuminganalysis is acceptableforoutlining complex pathologicalobjects,no real justificationfor suchaprocedurecanbefoundfor thedelineationof normal,healthyorgans,asneededin radiationtreatmentplanning,forexample.

20 G. Szek� ely et� al.
The�
primary reason for the need of a precise snakeinitialization is the presenceof disturbing attractorsin theimage,which do not belongto the actualobjectcontourbutforcethesnakeintolocalenergyminima. If thedeformationofasnakecouldbelimited to shapeswithin thenormalanatomicvariationof organs,suchlocalminimacouldbeavoided.
Elasticallydeformableparametricmodelsoffer a straight-forwardway for theinclusionof prior knowledgein theimageinterpretationprocessby incorporating prior distributionson the elastic model parametersto be estimated. Such aprocedurehasbeenimplemented,for example, by Vemuriand Radisavljevic (1994) using a hybrid primitive calleddeformablesuperquadricsconstructedin a multi-resolutionwaveletbaseor by StaibandDuncan(1992a)for deformableFouriermodels.
For complex shapesdescribedby a large number ofpossblyhighly correlatedparameters,theusageof suchpriorsmay becometedious. The modal analysisas proposedbyPentlandand Sclaroff (1991) offers a promisingalternativeby changingthe basisfrom the original modellingfunctionsto the eigenmodesof the deformationmatrix. This way thedominantpartof thedeformationscanbecharacterizedby thefew largesteigenmodes,reducingthe dimensionalityof theobject descriptorspacesubstantially. Suchmodal analyseshave beensuccessfullyapplied to medical image analysis,for example,by Sclaroff andPentland(1994)or NastarandAyache(1994).
Cootes�
et al. (1993) combinedthe power of parametricdeformableshapedescriptorswith statisticalmodalanalysis.They use active shapemodels,which strictly restrict theirpossibledeformationsaccordingto the statisticsof trainingsamples.Objectshapesaredescribedby thepointdistributionmodel(PDM)(CootesandTaylor, 1992),whichrepresentstheobjectoutlineby a subsetof boundarypoints.Theremustbea one-to-onecorrespondencebetweenthesepointsin thedif-ferentoutlinesof thetrainingset.After normalizationto size,orientationandpositionthey providethebasisfor thestatisticalanalysisof the objectshapedeformations.The meanpointpositionsandtheir modesof variation(i.e. the eigenvectorscorrespondingto the largesteigenvaluesof their covariancematrix) areusedfor delimiting the objectdeformationsto areasonablelinearsubspaceof thecompleteparameterspace.They proposeto solve the 3-D shapeanalysisproblemby aslice-by-sliceapproach(Hill etal., 1992)or by extendingthePDM conceptfor the descriptionof 3-D shapes(Hill et� al.,1993). Similar parametrizationbasedon point-by-pointcor-respondencewasproposedfor the3-D shapeanalysisof brainstructuresby Martin et� al. (1994).By usingthefreevibrationmodesof the nodaldisplacementmatrix of an elasticbody,they even separatephysicaldeformationmodeswhichcanbemodelledby elasticdeformationmodelsfrom experimental
modes,evaluatedfromstatisticalanalysisof atrainingsample.While the idea of restrictedelastic deformationof an
averagesurfacemodelis verypromising,theparametrizationof shapesby displacementof correspondingpointson theirsurfacesis notaconvenienttechnique.For alargetrainingsetcontainingmany differentanatomicstructures,thegenerationof thisparametrizationseemsto bevery tediousand,becauseof the lack of a reasonableautomatization,canbe a sourceof errors. A similar modal analysis, however, can beperformedfor other contourparametrizationtechniques,asfor example for the 2-D Fourier descriptorswhich wereoriginally proposedby Persoonand Fu (1977) and KuhlandGiardina(1982). StaibandDuncanhave demonstratedsegmentationby parametricallydeformableelastic modelsfor 2-D outlines(StaibandDuncan,1992a)and3-D objectsurfaces(Staib and Duncan,1992b); their 3-D model was,however, limited to star-shapedsurfaces. Here,we proposea novel techniquebasedon modalanalysisof the parametervectorof objectcontours,providing the desirablerestrictionof elasticdeformations. The methodusesautomaticshapeparametrizationfor any surfaceswith sphericaltopology, thusavoiding theproblemof finding correspondingpointsamongdifferentboundaries.
The paperis organizedas follows. Section2 discussesthe new 2-D modalanalysisprocedureandthe model-basedsegmentationby restricteddeformation. The procedureisillustrated with the segmentationof the corpus callosumstructureon mid-sagittalMR imagesof the humanbrain.Section3 proposesseveral improvementsof the procedure.Section 4 generalizesthe method to 3-D, addressingtheincreasedcomplexity requiringnew mathematicalandnumer-ical solutions. Section5 finally gives the conclusionsandfuture directionsfor the developmentof automated,model-basedsegmentationtechniques.
2. MODAL ANALYSIS OF 2-D FOURIER MODELS
In thissectionwefirst summarizethemathematicsof Fourierdescriptorsfor the parametrizationof simpleclosedcurves,andtheir usein snake-like elasticmatchingprocedures.Wesummarizehow to applythemodalanalysisto 30normalizedoutlines of the corpus callosum extracted from 2-D mid-sagittalMR images.Theproposedprocedureisacombinationof aninitializationusinganaveragemodelbasedon templatematchingtechniquefollowed by an elasticdeformationre-strictedto the major eigenmodes.We demonstratethat thisseparationof the similarity transform(translation,rotationand scaling) from the elastic deformation often leads tounsatisfactory segmentationresults, calling for a modifiedsegmentationprocessthat providesa unified framework forinitializationandelasticmodelmatching.

Constrained�
elasticFouriermodels 21
2.1. Parametrization of 2-D contourswith Fourierdescriptors
The contourof a simply connectedobject(without holes)isrepresentedby a closedcurve with coordinates� x� � t � � y� � t� � � ,with t rangingfrom 0 to 2 � . Thecoordinatefunctionscanbeexpandedin a Fourierseries.Restrictingtheseriesto degreeK resultsin theparametricdescription
r� � t � p ! " x� # t� $ p %y� & t� ' p (
) a0*
c+ 0* ,
K
k- .
1
ak- b
/k
-c+ k
- d0
k- 1 cos2 kt 3
sin4 kt 5 6The outline is now completelydescribedby the parameter-vector
p 7 8 a0* 9 9 9 a: K ; b1 < < < bK = c0
* > > > c+ K ? d0
1 @ @ @ d0
K A B CTheparameterscanbeeasilycalculatedfrom thesampling
points of the outline qD 0* E qD 1 F G G G F qD P withH qD 0
* I qD P (we usemaximallydensesamplingof theboundary, asprovidedbytheimageraster).Theresultingparametricshapedescriptioncanbemadeinvariantundersimilarity transformationby shifting,rotating and scaling accordingto the actual displacement,orientationandsizeof theellipsedeterminedbythefirstdegreetermsof the Fourier series. Similarly, the startingpoint ismoved to acanonicalposition.
2.2. Fourier snakesThesnake techniqueasproposedby Kasset� al. (1988)
Jtries
to find the positionof a curve r� K t� L p M ,� which minimizestheenergy
E N p O P EQ R
r� S t� T p U U V EIW X r� Y t Z p [ [ \ ED
] ^ r� _ t� ` p a a bByc
varying p , the curve deformsitself to minimize theimageenergy
EI d r� e f 2g h
0* P
i jr� k t� l p m m d
nt o
searchingfor anoptimalpositionin the image,describedbythe potential P
i pr� q t r p s s . A typical choice takes P t r� u t v p w w
equalto thenegativemagnitudeof theimagegradient:
P x r y t� z p { { | } ~ � I � r � t� � p � � � �whereI is thesmoothedimage.Thedeformationterm ED � r �is called the internal energy of the snake and serves as aregularizationforce. It restrictsthe elongationandbendingof the snakes,andnormally dependson the first andsecondderivatives of thecurve r � t � p � .
Staib and Duncan (1992a) proposea different energymodel, which makes use of the normal direction of theparametrizedcurve and of the image gradient to achievea higher selectivity. Normalizing the image potential bythe contourlengthallows contractionanddilation of curveswithoutaffectingtheenergy function.
EIW � r� � t� � p � � � � 2
g �0
* � I� �
r� � t� � p � � � �r� � � t � p � dt�
� 2�0
* ¡r ¢ t £ p ¤ ¥ dnt
¦ 1 §Thesignof theenergy EI ¨ r © will decidebetweensegment-
ing bright objectson a dark backgroundor vice versa. Thepolarityof theboundarycanbeneglectedbyusingtheabsolutevalueof thedotproductin theintegrationterm.
Oneª
has to realize that cutting the Fourier expansionata finite degree alreadyserves as a regularization, leavingout high frequency variationsof the coordinatefunctions.However, the internalenergy cannotbe neglected,basicallyfor two reasons:
« e� ven Fourier modelsof low degreecangeneratesharpcusps,� and¬ the
parametrizedcontourcancrossitself.
Whereasself-crossingsof theoutlineareexpensive to detect,discontinuitiesof thetangentcanbeevaluatedfrom thecurveparametrization. At such locations the curvature ® ¯ t� 0
* ° p ±andits derivative ²³ ´ t� 0
* µ p ¶ both becomeinfinite. While highcurvatureof the boundaryshouldnot be excludeda: priori ,the curvaturederivative is chosento indicatediscontinuities(seealsoStaibandDuncan,1992),providing the followingexpressionfor theinternalenergy of theFouriersnake:
ED · r ¸ t ¹ p º º » 2¼0
* ½¾ 2g ¿
t� À p Á Â Ã Är Å t� Æ p Ç È 2g
dt ÉFor theminimizationof thetotalenergy functionweusedtheE04JBFroutineof theNA
ÊGTM library (1988),usinga quasi-
Newton algorithmfor finding anunconstrainedminimumofa functionof severalvariables.
2.3. Model-basedsegmentationof the corpuscallosumWe testedtheproposedprocedureon a collectionof 30 mid-sagittalslicesof MRI brain images.A few imagesfrom thetrainingsetareshown in theupperrow of Figure1. Ourgoalwas the automaticsegmentationof the outline of the corpuscallosumfrom grey scaleimages.
2.3.1. ModelbuildingThe corpus callosum outline had to be segmented andparametrizedfor eachimageof the training set. We used

22 G. Szek� ely et� al.
Figure 1. Trainingsetfor theanalysisof thecorpuscallosumon mid-sagittalslicesof MRI braindatasets.Theupperrow shows a region ofinterestof theoriginal slice,thelower row containsthesegmentedoutlinein a standardizedinvariantconfiguration(Fouriercoefficientsup todegree100).
Figure 2. Template-matchingexampleto find a similarity transformbetweenthemeanmodelcurve andthegradientmagnitudeimage. (a)Shows the original image,(b) its Gaussiansmoothedversion(Ë Ì 5 pixels) and (c) the correspondingCanny gradientmagnitudeimage,respectively. In (d) theoptimalfit foundby templatematchingis overlaidwith theedgeimage.

Constrained�
elasticFouriermodels 23
Figure 3. Segmentationexamples(a–c) illustratingsegmentationfailures. Imagesin thetop row illustratethe initial placementof themodelcurves(usingtemplatematching),thebottomrow showsthesegmentationresult.Thesameinitial modelcurve isusedfor thedifferentimages.
theFouriersnakeprogramasdescribedabove to performthistask, with a manualinitialization of the optimization. Thesegmentationresultscanbeseenin thelowerrow of Figure1.Fouriercoefficientsup to degree100have beenusedfor thedescription. The resultingcontoursof the training sethavebeennormalizedtobeinvariantto translation,rotation,scalingandthestartingpointof theparametrization.
The�
meanmodelhasbeendeterminedfrom thenormalizedoutlinesby simply averagingtheir parameters.In order todeterminethemajordeformationmodesdefinedby theabovetrainingset,we performeda principalcomponentanalysisofthecovariancematrix of thenormalizedFouriercoefficients.As afterthefirst few eigenvectorsthevariancebecomesverysmall,thefew largesteigenmodeshave beentakento build aflexible model that explains the biological variability of theshapeof thecorpuscallosumoutline.
2.3.2. Initial placementof modelcontourby templatematcÍ hing
A segmentationof the corpus callosum from grey-valuedimagesbasedon thedeformationof themeanmodelrequiresa suitable initialization. Due to the normalizationof theFouriercoefficients,theaveragemodelonly expressesshapedeformationsup to a similarity transformation. Therefore,theinitial placementhasto provideasufficiently goodmatchbetweenthe modelandthe edgesin the grey-valuedimage.A standardtemplate-matchingprocedurewaschosento solvethis first optimizationproblemby equidistantlysamplingthepossibleparametersof thesimilarity transformationwithin areasonablerange. The goodnessof fit was calculatedfor a
Canny edgemapon a relatively large scale,sincethe rigidtransformationdoesnotallow for elasticshapedeformations.Figure2 illustratestheresultof theinitialization by templatematching.Figures2a–cshow theoriginalimage,theGaussiansmoothedimage ( Î Ï 5 pixels), and the Canny gradientmagnitude,respectively. Figure 2d presentsan overlay oftheoptimalfit betweenmodelcurveandgradientimage.
2.3.3. Segmentationby restrictedelasticdeformationAfter initialization,weapplyamodifiedversionof theFouriersnakesprogram.Insteadof optimizingin thecompletespaceof the normalizedFourier coefficients, the optimizationhasbeenrestrictedin order to allow only deformationswhichare prominently representedin the training sample. Inthe first step the eigenvectorsof the parametercovariancematrix are selectedas a different set of basisfunctions inplaceof the harmonics.The restrictedvariationis achievedby choosinga subsetof eigenmodes,usually the n largestones,andcalculatingtheoptimizationin this linearsubspace.Startingwith theresultof thetemplatematching,themodeliselasticallydeformeduntil it fits (in alocaloptimum)theedgesalongtheobjectcontour.
Theproceduredescribedabove providedsatisfactoryseg-mentationresultsin many cases.In somecases,however, wefoundit difficult to find thecorrectcontour. Figure 3 showsafew examplesof unsuccessfulsegmentations.Analysisof theresultshasshownthattheseparationof thesimilaritytransform(in the initialization step) from the elastic deformationismainly responsiblefor this failure. As the models havebeennormalizedbefore the statisticalanalysis,translation,

24 G. Szek� ely et� al.
rotation and scaling have actually beenexcluded from theelasticdeformationstep,forbiddingminor correctionsof thesimilarity transformdeterminedby the templatematchinginthe initialization step. Restrictingthe deformationsto thesubspaceof the dominanteigenmodesmadethis situationeven worseby not allowing correctionsthroughfree elasticdeformations.This hasled to the large segmentationerrorsdemonstratedby theaboveexamples.
The following sectiondescribeshow theseproblemscanbe solved by incorporatingthe similarity transforminto theanalysisof biologicalvariability. This way all covariationofthe poseandelasticdeformationparameterscanbe handledin aconsistentway, too. Theselectedsolutionalsoavoidsthesomewhat artificial separationof the imageanalysisprocessintoaninitializationandelasticmatching,leadingtoatwo-stepcoarse-to-finesegmentationprocedure.
3. IMPROVING FOURIER SNAKE SEGMENTATION
3.1. Alter native initialization techniquesOne could try different ways to avoid the segmentationproblemsanalyzedin theprevioussection.
Ð The�
desirablemixing of the effectsof similarity trans-form andelasticdeformationcould be achieved by theincorporationof eigenvaluesbelongingto thethelargesteigen� vectorsinto the initialization (templatematching)procedure.Ñ However, thedimensionalityof thesampledsearchÒ spacewould becomefar too high and wouldcreate,� especiallyin view of a generalizationto 3-D, anunacceptableÓ computationalburden.Ô Oneª
couldalsotry to extendtheparametersof theelasticdeformationn
with translation,rotationandscaling. ThiswH ould lead to a higher dimensionallocal optimizationproblemÑ without allowing thehandlingof theoptimiza-tion
of theparametersin onecoherentframework.Õ The�
selectedoptimizationprocedurefindsthenearestlo-cal� optimumonahigh-dimensionalstronglynon-convexgoalÖ function. Thismakestheprocedurehighly sensitiveto
non-desiredlocal optima. We are currently experi-mentingwith alternative globaloptimizationtechniquesas× for examplegeneticalgorithmsasproposedby Hilland× Taylor (1992)andthe taboosearch(Reeves,1993)borro
wedfromdiscreteoptimization,whichmayprovidesomeÒ improvement.However, oneshouldrealizethatthe�majorÍ problemdoesnotlie in theinitializationprocedure.The templatematchingusually provides a reasonablefirstØ
approximationusing the meanmodel, which stillleadsÙ
to unsatisfactory resultsdue to the separationofthe
similarity transformandtheelasticdeformationde-scribedÒ bytheprincipalmodesof theFouriercoefficients.Thisproblemis addressedin thenext paragraph.
Figure4. Positionof theanteriorcommissure(AC)andtheposteriorcommissure(PC)onamid-sagittalMRI imageslice. Theconnectingline representstheunit vectorxÚ of theexternalanatomicalcoordinatesystem.
Figure 5. The 50 largest eigenvaluesof the covariancematrixcalculatedfromtheFourierparametersof the30curvesin thetrainingset.
3.2. Model incorporating full biological variabilityWe expectfor imagesrepresentinganatomythat the relativeposition,Û rotation and× size of healthy organs is restrictedin a similar way as their elastic deformation. If we coulddefinea coordinatesystemfixedto theanatomy, therewouldbe no reasonfor an unrestrictedsimilarity transformwhichprecedesthe elastic matching. The Fourier descriptorsoftheorganoutlinesoriginally containthis information,� but wesuppressit by normalizingthe coefficients. In the caseofthecorpuscallosum,theAC/PCline is a generallyaccepted,well-detectablegeometricfeatureof themid-sagittalimages,whichrepresentssuchastandardcoordinatesystem.Thelinefrom theanteriorto theposteriorcommissure(AC/PCline) asillustratedin Figure4 hasbeenmanuallyextractedfor eachimageof the trainingset. After determinationof theFourier

Constrained�
elasticFouriermodels 25
Figure 6. Theupperrow shows thesegmentedoutlinesof thetrainingsetwith (left) andwithout (right) normalizationof theposeparameters.Thelower row shows thecorrespondingmeanmodels.
coefficients,we apply normalizationonly to fix the startingpointof thecurveparametrization.Thestandardizationof theimages,necessaryfor the determinationof the deformationmodes,is basedon a normalizationof the AC/PCline to aneÜ xÝ unit vector. After that, thesamestatisticalanalysisof thetestsetcanbeperformedaspreviouslyexplained,providing ameanmodel(now includingits relativepositionandsizeto theAC/PCline), andthe deformationmodeswhich incorporatetheparametersof thesimilarity transform,too. Theresulting
eigenvaluesareplottedin decreasingorderin Figure5. Onecanseethattheremainingvariationafterthe12theigenvaluebecomesnegligible. Accordingly, all deformationshavebeenrestrictedto the12 largesteigenvectors.
Figure6 illustratesthe determinationof the meanmodelby comparingtheresultsusingthenormalizedoutlinesasde-scribedin theprevioussection(left side)andtheaveragemodelresultingwithout normalizationpresentedin the anatomicalreferenceframe(right side). Onecanseethevariationof the

26 G. Szek� ely et� al.
Figure 7. The first four eigenmodesof the deformationsof the 30objectsin the training set. The calculationsarebasedon contoursrepresentedby Fourierdescriptors,which arenormalizedonly withrespectto the choiceof the startingpoint. The deformationrangeamountsto Þ ß 2 eigenvalues.
poseof thetrainingsamplesin theexternalcoordinatesystem.At thesametime,muchmorecharacteristicshapefeaturesareretainedin theaverageoutlineif nonormalizationisperformedbeforethetraining.
Figure7 illustratesthedeformationsaccordingto thefirstfour eigenmodes,with deformationsin the rangeof à á 2eigenvalues. It shows how the poseandelasticdeformationparametersaremixedtogetherin thedominanteigendeforma-tions.
3.3. SegmentationThe determinationof the AC/PC line now becomespart ofthesegmentation,sincethemodelis built basedonanormal-ization to theselandmarks. The AC/PC line is determinedmanuallyfor the imageunderanalysis. The flexible model,characterizedby themeancontourandtheeigenmodes,nowincorporatesc+ hangesof the positionand local deformationsof the genericmodel, which makes the initialization stepobsolete. In order to make the optimizationrobust againstlocalextremaweapplieda two-step� coarseto finestrategy.
In the first stepon the coarselevel we usea proceduresimilar to templatematching,aspreviously described.How-ever, we now usea small setof a few dominantmodesandcalculatethe best match in this linear subspaceof majordeformationsbyequidistantlysamplingtheeigenvaluesof theselecteddeformationmodesin a reasonablerange.This waythe completeparameterspaceis explored,and the resultofthiscoarsesegmentationcanbeusedasareliableinitialization
for thefollowing local optimizationstep.Oneshouldrealizethat the larger the numberof eigenmodesparticipating inthis coarsestep, the better the initial fit will be in thefollowing step.On theotherhand,thecomputationalburdengrows exponentiallywith the dimensionalityof the sampledparameterspace.The numberof eigenmodesconsideredinthis stepcan be selectedby trading the fit quality and thecomputationalrequirements.
Onª
thefine level thesegmentationis performedin theho-mogeneousparameterspaceof theeigenvectorscorrespondingto the largest eigenvalues, now choosinga larger numberof eigenvectorsthan on the coarselevel. Due to the fullincorporationof the parametersof the similarity transforminto theeigendeformations,thefine tuningof themodelposecan be performedwithin the variability determinedby thetraining set. Figure 8 shows the results of the modifiedsegmentationprocedure,which achieved perfect results inalmostall cases.
Oneª
shouldmentionthat in someapplications,the iden-tification of the small individual variationsof the contouroutline, which is not representedeven by the whole set ofthe eigenmodes,is desirable. In this caseour strategy canbe extendedwith an additional finer level by applying anunrestricteddeformationof theparametrizedsnake usingtheresultof theprevioustwo levelsasinitialization.
4. 3-D FOURIER MODELS OF HUMAN BRAINSTRUCTURES
Ourgoalis thegeneralizationof theimproved 2-D procedureto3-D. Thenew toolshouldallow awellreproduciblesegmen-tationof objectsin volumedatawith minimalhumaninterac-tion. Thissectiondescribesthefirst stepsin thisdirection,thegenerationof 3-D Fouriermodelsfrom manuallysegmentedtrainingdata,andtheuseof unrestricted3-D Fouriersnakesfor elasticmatchingin grey-valuedvolumeimages.As in theprevioussection,wefirst summarizethebasicmathematicsofthe 3-D Fourier snakes,andthenshow first resultson someMRI braindata.Themajorproblem,finding a homogeneousparÛ ametrizationofâ surfacesof arbitr: arily shapedobjects, issolvedbyapplyingaveryrecentlydevelopednew parametriza-tiontechnique.It overcomeslimitationsgivenby othersurfaceparametrizationschemes,e.g. the torus topology presentedin Staib and Duncan(1992b). The following descriptionis guided by the example of segmentingdeepgrey matterstructuresof thehumanbrainfrom MR volumedata.
4.1. Description of surfacesby spherical harmonicfunctions
The descriptionof the surfacesof simply connected3-Dobjectsin anarbitrarybasiscanbeperformedsimilarly to the

Constrained�
elasticFouriermodels 27
Figure8. Segmentationof thecorpuscallosumusingthemanuallydeterminedAC/PCline asareferencecoordinatesystemfor modelbuildingandsegmentation.(a) Shows the initialization, resultingfrom a coarsematchin the subspaceof the largestfour deformationmodes. (b–d)Illustratesinglestepsof theoptimizationin thesubspaceof thelargest12deformationmodes(allowing fineadjustments)andthefinal result.
2-D case.Thesurfacewill beparametrizedby two variables,the ã and× ä polarÑ parameters,andwill be definedby threeexplicit functions
r å æ ç è é êx� ë ì í î ïy� ð ñ ò ó ôz õ ö ÷ ø ù
ú
Wû
eemphasizethatthis is notaradialfunction. If weselectthesphericalharmonicfunctions(Ymü
lý denotes
nthefunctionof
degreelþand× ordermÍ ,� seeGreinerandDiehl (1964))asabasis,
thecoordinatefunctionscanbewrittenas
r� ÿ � � � � p � � K�
k- �
0*
k-
mü � � k- c mü
k- Y
mük
- � � � � where
c mük
- � cxÝ mük
-cy� mü
k-
cz� mük
- �

28 G. Szek� ely et� al.
Figure9. A simplefunctionU � � � 3�, visualizedby facettingthesurfacesin triangles.
Weagainrestrictedtheexpansionto thefirst K � 1 terms.Whenû
thefreevariables� and× � runover thewholesphere(e.g. � � 0
� � � � �, ! 0 " " " 2# —seeFigure9, left), thepoint
r $ % & ' ( runsover the whole surfaceof our object(Figure9,right). The sphere) 3
* is+
considereda perfectly symmetricsurfacewithoutany singularpointsor preferreddirections.
The�
surfaceis thendescribedby theparameters
p , - c+ xÝ 0*0
* . cy� 0*0
* / cz� 0*0
* 0 c+ xÝ 1 11 2 c+ xÝ 0
*1 3 cxÝ 1
1 4 cy� 5 11 6 c+ y� 0
*1 7 c+ y� 1
1 8c+ z� 9 1
1 : cz� 0*1 ; c+ z� 1
1 < = = = cxÝ > KK
� ? ? ? c+ z� KK @ A B
Oneª
hasto realizethat the Fourier parametrizationis justone possibility for the parametricdescriptionof contours.Alternative methods,for exampledeformablesuperquadrics,have also beenproposedin the literature(TerzopoulosandMetaxas,1991).Wewouldliketo emphasizethatany reason-ableparametricshapemodelcanbeusedwithin thepresentedformalism. We preferredto useFourier parametrizationasit, in contrastto superquadrics,imposesno predeterminedsymmetriesupon the object surface and has no preferreddirectionsin space.It is complete;no additionalformalismsare neededto rotate, translate,taper, bend,twist or locallydeform the model, as the surfaceof any simply connectedobjectcanberepresentedto any degreeof detailin thesimpleyet comprehensive formalism.
InC
thefollowing wesummarizethesurfaceparametrizationprocedurewhich is describedin detail in BrechbuhlerÓ et al.(1992,1995).
4.2. The surfacedata structur eMedical CT or MRI imagesare examplesof volumetricdata. For each cuboidal cell (volume elementor voxel)in a certain volume we have one or more measurements.When segmentationsucceeds,one anatomicalunit can becharacterizedby a binarydatavolume,in which every voxelcontainseither1, which meansit belongsto the unit, or 0,meaningit is in thebackground.Theobjectis thenthesetof‘1’ voxelsandcanbepicturedasa collectionof smallcubes,adoptingthe cuberille+ notion (Hermannet� al.,� 1979). Thesurfaceof a voxel objectis a setof unit squares,all parallelto oneof thethreecoordinateplanesyz� ,� xz� orâ xy� . Theedgesandverticesthatboundthefacesarealsopartsof thesurface,which is representedasadatastructurethatreflectsgeometryaswell asneighbourhoodrelations.
4.3. Parametrization of closedsurfacesA key stepin theshapedescriptionof asurfaceis its mappingtotheparameterspace,thesphereD 3
* . Any pointonthesurfacemustmapto exactly onepoint on thesphere,andvice versa.The locationon the spherecorrespondingto a surfacepoint

Constrained�
elasticFouriermodels 29
definestheparÛ ameters ofâ thepoint. It canberepresentedastwo polaror threeCartesiancoordinates,relatedthroughthebijection
uEF G sin H cos� I
sinÒ J sinÒ Kcos� L M
Mappinga surfaceto thesphereassignsparametersto everysurface point; thereforewe call it parÛ ametrization. Themappingmustbecontinuous,i.e. neighbouringpointsin onespacemustmaptoneighboursin theotherspace.It ispossibleand desirableto constructa mappingthat preserves areas.Narrowing to the cuberille notion, Figure 10 symbolicallyillustratesthis mappingof a selectedfacet from the objectsurfaceto aportionof N 3
* . It isnotpossiblein generalto mapevery surfacefacetto a sphericalsquare:distortionscannotbeavoided,but they shouldbeminimal.
It emergesthat theparametrization,i.e. theembeddingoftheobjectsurfacegraphinto thesurfaceof theunit sphere,is aconstrainedoptimizationproblem.Thefollowing paragraphsdefine the meaningof variables,� objectiveO (goal function),constraintsand× startingvaluesin this context.
4.3.1. VariablesThe coordinatesof all vertices vary in the optimization.Using two (e.g. spherical)coordinatesper vertex would bethe most economicrepresentationwith respectto storagespace,but it would make the equal treatmentof all spatialdirectionsdifficult andposetheproblemof discontinuityandsingularitiesin the parameterspace. We prefer CartesiancoordinatesP uQ R S R T U for
Vrepresentingalocationonthesphere,
introducingone virtual degreeof freedomper vertex. Thenumberof variablesis threetimesthenumberof vertices.
4.3.2. ConstraintsTwo kindsof equalitiesandonekind of inequalityconstrainthevaluesthatthevariablescantake.
(i) Every vertex must lie on the unit spherein parameterspace,i.e.uQ 2 W X 2 Y Z 2 [ 1. ThisconstraintcompensatesforV
thevirtual degreeof freedomandforces.
(ii) We askfor ar: eapreservation; any objectsurfaceregionmust\ mapto a regionof proportionalareaon thesphere.Wû
eincludeoneconstraintfor eachelementaryfacet:thearea× of thesphericalquadrilateralmustbe4] dividedbythe
total numberof faces.
(iii) All quadrilateralson thespheremustremainconvex; noangle× ^
k- may\ becomenegativeor exceed_ .
4.3.3. ObjectivefunctionThegoal` is
+to minimizethedistortionof thesurfacenetin the
mapping. It musttendto make the shapeof all the mappedfacesassimilar to their original squareform aspossible.Tofulfil this goal perfectly, a facetshouldmap to a ‘sphericalsquare’(seeFigure10). This canin generalnot be reachedfor all faces,andweneedto tradeoff betweenthedistortionsmadeat differentvertices. We observe that the ideal shapeof any face,a sphericalsquare,minimizesthecircumference
3*i
a b0
* sc ia of any sphericalquadrilateralwith agivenarea.At the
sametime it maximizes 3*i
a d0
* cossc ia . Thesetwo measuresare
similar, but not equivalentif summedover thewholenet,asthey tradeoff distortionsdifferently. Thesecondmeasurepun-ishestoo-longsidesmoreandhonourstoo-shortsideslessthanthefirst one,which is a desirableeffect. It is alsosimplertocalculate;thecosineof asideisthedotproductof itsendpoints.
4.3.4. StartingvaluesThevariablesin ouroptimizationarethepositionsontheunitsphereto which the verticesaremapped,and initial
evalues
meana first rough mappingof the object’s surface to thesphere. It is important for the optimizationalgorithm thatthespherebecompletelycoveredwith facesandnoneof themoverlap,evenin thebeginning.
Arbitrarilyf
, two verticesarechosenaspolesanda surfacepath connecting them as a date line. Discretizing andsolving the Poissonequationsg h i 0
�and j k l 0—with
appropriateboundaryconditionsfor the polesand the dateline—yieldsvalues m n o p q for eachvertex. Figure11 showsthe initial parametrizationthus definedfor the small objectfrom Figure10.
Theoptimizationmoves theverticesaroundon thesphere.The poles lose their special meanings,and all facesgetequalarea. The mappingconverges to a stateminimizingoverall distortions. The sameresult is reachedfrom allpoleassignments(modulorotations).Figure12 presentstheparametrizationresultfor thesamesmallobject.
4.4. Elastically deformable Fourier surfacemodelsUsingtheparametricsurfacedescriptionpreviouslypresented,the parametrizedFourier snake conceptcan be generalizedfrom 2-D to 3-D. The conceptis is similar to the techniqueproposedby StaibandDuncan(1992b). However, a surfacecan be arbitrarily sampledbasedon the variables r and s(there is no distinguishedorientationor position of poles),andthesurfaceenergy functioncansimilarly bedefinedandevaluatedasin the2-D case.Theimagepotentialcanstill usethecomplete(vector-valued)gradientinformation
EI t r u v w x w p y y z {A
|I } r ~ � � � � p � � � n� � r � � � � � p � � d
nA

30 G. Szek� ely et� al.
Figure 10. Every faceton theobjectsurfacemapsto a sphericalquadrilateral.Its sidesaregeodesicarcson thesphere.On theunit sphere,asidesi
� is equalto thecorrespondingcentreangle.Thequadrilateralin this illustrationis specialin thatits sidess0� � � � s3
� areequalandits angles�0
� � � � �3
� areequal:it is asphericalsquare.
Figure11. Optimizationstartsin thisstate,whichis plottedin threeways.(a) Thesurfacenetis plottedin thick linesonthesphericalparameterspace.(b) � andcos� areinterpretedasCartesiancoordinates,giving a true-areacylinderprojection.Thehorizontallinesat � 1 arethepoles.(c) Conversely, theglobecoordinategrid is drawn over theobject.For comparison,onevertex is markedwith ablackdot in all diagrams.
wheredA is thesurfaceelementandn� is thesurfacenormalvector. Usinga� � � r� � � � � � r� � � � � n� dA
¡dn ¢
d£ ,� wederive
EIW ¤ r� ¥ ¦ § 0
* 2©0
* ª I « r ¬ ® ¯ ® p ° ° ± a� ² r ³ ´ µ ¶ µ p · · dn ¸
dn ¹
º0
* 2g »0
* ¼ a� ½ r� ¾ ¿ À Á À p   à dÄ dn Å Æ
Wû
e usethe internal energy term ED] Ç r È É Ê Ë Ê p Ì Ì to
avoid
sharpdiscontinuitiesin thesurfacenormals.Thecurvatureofthesurfacecanbedescribedby theprincipalcurvaturesÍ 1 andÎ
2g ,� whicharecombinedto
Ï Ð Ñ 2g1 Ò Ó 2
g2 Ô
creatinga measurefor the curvatureat every point on thesurface. As in the 2-D casewe want to limit its derivative,
resultingin theregularizationterm
ED Õ r� Ö × Ø0
*2
g Ù0
* Ú Û Ü Ý Þ ß à ßp á â 2 ã ä a� å æ ç è ç p é ê 2 d
n ëdn ì í
After the definition of the total energy, the problem iscompletelyanalogousto the2-D case:we have to determinethe parametersthat generatea surfacewhich minimizesthisenergy. We usedexactly the sameminimizationproceduresasin the2-D case.
For the averagesurfacebeforeandafter the deformation,themappingwill not meettheconstraintof constantdensityexactly, norwill it exactlyminimizedistortions.However, themappinghasbeenindividually adaptedto eachof thetrainingobjects,whicharechosento spanthewholerangeof expectedbiological variability. A smoothinterpolationbetweenthemcanbe expectedto reproducecloseto uniform andoptimal
Constrained�
elasticFouriermodels 31
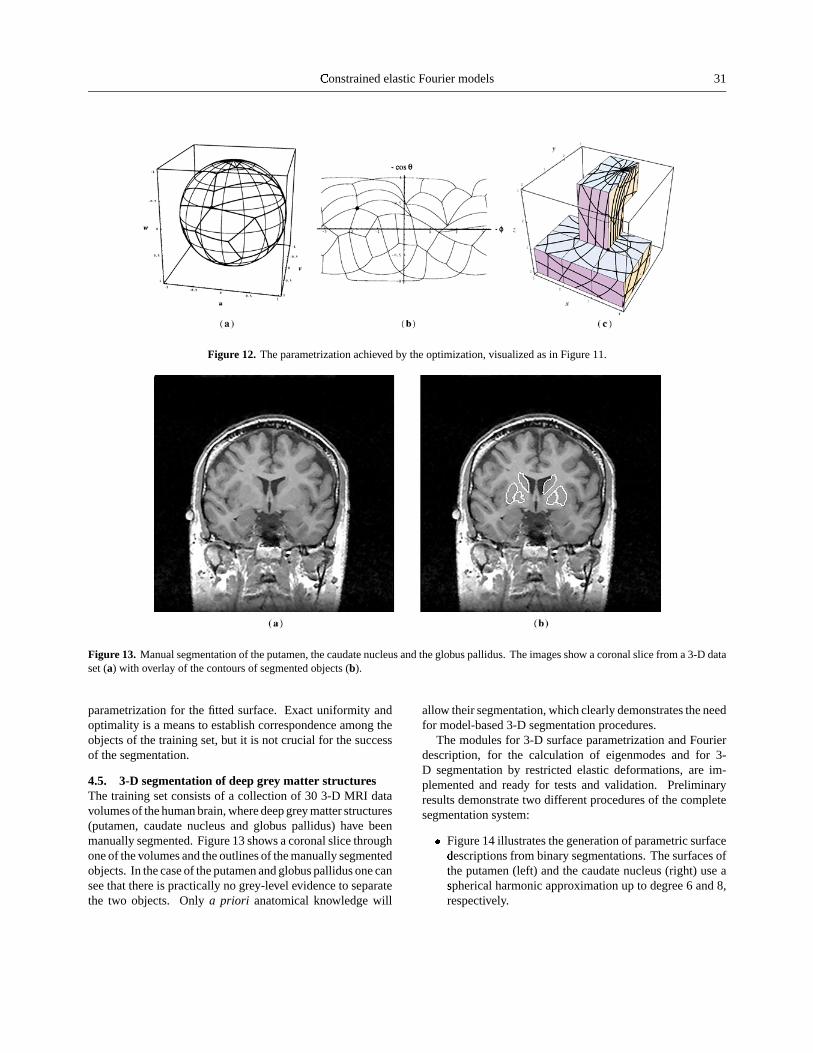
Figure12. Theparametrizationachieved by theoptimization,visualizedasin Figure11.
Figure13. Manualsegmentationof theputamen,thecaudatenucleusandtheglobuspallidus.Theimagesshow acoronalslicefrom a3-D dataset(a) with overlayof thecontoursof segmentedobjects(b).
parametrizationfor the fitted surface. Exactuniformity andoptimality is a meansto establishcorrespondenceamongtheobjectsof thetrainingset,but it is not crucial for thesuccessof thesegmentation.
4.5. 3-D segmentationof deepgreymatter structur esThe trainingsetconsistsof a collectionof 30 3-D MRI datavolumesof thehumanbrain,wheredeepgrey matterstructures(putamen,caudatenucleusand globus pallidus) have beenmanuallysegmented.Figure13showsacoronalslicethroughoneof thevolumesandtheoutlinesof themanuallysegmentedobjects.In thecaseof theputamenandglobuspallidusonecanseethatthereis practicallynogrey-level evidenceto separatethe two objects. Only a priori anatomicalknowledgewill
allow theirsegmentation,whichclearlydemonstratestheneedfor model-based3-D segmentationprocedures.
Themodulesfor 3-D surfaceparametrizationandFourierdescription, for the calculation of eigenmodesand for 3-D segmentationby restrictedelasticdeformations,are im-plementedand ready for testsand validation. Preliminaryresultsdemonstratetwo differentproceduresof thecompletesegmentationsystem:
î Figure14illustratesthegenerationof parametricsurfacedescriptionsn
from binarysegmentations.Thesurfacesofthe
putamen(left) andthecaudatenucleus(right) useasphericalÒ harmonicapproximationup to degree6 and8,respectively.

32 G. Szek� ely et� al.
Figure 14. Parametrizeddescriptionby sphericalharmonicsup to degree8 of thesurfaceof deepgrey matterorgans.Theputamenis shownon theleft, thecaudatenucleuson theright. Theoriginal voxel objectis overlaidasawire-framestructureof thevoxel edges.
Figure15. Segmentationof theleft caudatenucleusby 3-D Fouriersnakes. Imagesin panela representï theinitial placementof the3-D modelasaxial (top) andcoronal(bottom)cuts(with sphericalharmonicsup to degree3 with 48 parameters).Panelb shows thefinal segmentationresult.ï A graphicaldisplayof theelasticallydeformedmodelrepresentingtheresultof the3-D segmentationis shown to theright (c). Thefinaloptimizationwas basedonsphericalharmonicsup to degree5 (108parameters).
ð Figure15 demonstratesthesegmentationof thecaudatenucleusñ from original grey-valuedvolume databy the3-Dò
Fouriersnakeprocedure.Here,theinitial placementofâ the model surfacewas performedautomaticallybycalculating� aninitial placementof a sphericalharmonicsurfÒ ace of low degree (degrees0–3). The imagesinpanelsÑ a and b show the initialization and final resultafter× elasticdeformationin axial andcoronalcuts. Forthe
elasticfit weusedsphericalharmonicsuptodegree5.Panelc illustratesasurfacerenderingof thesegmentationresult.ó 15–20minuteswereneededfor theelasticfit ofthe
modelsonaSparc10/41processor.
We are currently calculatingthe surfaceparametrizationand the descriptionby sphericalharmonicsof all the 30segmentations. Based on these results, the deformationeigenmodesfor these objects can be determined. Thesegmentationitself, i.e. the initial placementand restrictedelasticdeformation,will becarriedoutwith theFouriersnakeprocedureas shown in Figure 15. However, optimizationis performedin the subspaceof a small set of eigenmodesratherthantheoriginal spaceof theparameters,asdiscussedin section3 for the2-D case.

Constrained�
elasticFouriermodels 33
5. CONCLUSIONS
Automated,robustsegmentationof medicalimagesmostoftenneedsa priori anatomical× knowledge. Typical casesarethesegmentationof healthyorgans,which presentrestrictedanatomicalvariability, or the segmentationof organsif onlyincompleteevidence for boundariesis given by the grey-valued images, requiring an ‘intelligent guess’ about thepositionof theobjectboundary.
Geometricô
organmodelsandthestatisticsof their normal�(expected)variationseemÒ to offer apromisingsolutionto thisproblem.Weproposedtheuseof theFourierparametrizationof our models,followedby a statisticalanalysisof a trainingset, providing mean organ models and their eigendefor-mations. Elastic fit of the mean model in the subspaceof eigenmodesrestrictspossibledeformationsand finds anoptimal match betweenthe model surface and boundarycandidates.
Wû
edemonstratedthecompleteprocedurewith thedetermi-nationof theoutlineof thecorpuscallosumona2-DMRI sliceof thehumanbrain. We have shown that theselectionof ananatomicallydefinedreferencecoordinatesystemallows theinclusionof thevariationof thespatialpositionandorientationinto the descriptionof the modelvariation. This procedureprovidesahomogeneousframeworkfor thecompleteanalysis,while addingonly minimal, well defineduserinteractiontothe procedure. The initial placementof the averagemodelis performedby a coarseelastic deformationdefined byonly the largesteigenmodes,helping to drive the followingoptimizationinto the‘correct’ localoptimum.
In this paperwe presentedpreliminary resultsof a full3-D generalizationof theFouriersnakeprocedure.While themodulesareimplementedandreadyfor analysis,westill needto spendeffort into the3-D modelbuilding. Wedemonstratedthatmanuallysegmenteddeepgrey matterorgansof thehumanbraincanbedescribedby sphericalharmonicdescriptors.Wefurtherdemonstratedtheapplicabilityof anunrestricted3-DFouriersnakeprocedurefor thesegmentationof theseorgans.In contrastto similar researchprojects,we could overcomethebottleneckof surfaceparametrizationby applyinga newparametrizationtechniquewhich provides a homogenousparametrizationof an arbitrarily shapedsimply connectedobject. Further, the novel method representsa true 3-Dextensionof the 2-D procedure,which significantly differsfrom combiningresultsof astackof 2-D slices.
Ourª
ultimategoalis toprovideanautomated3-Dsegmenta-tion procedurethatneedsonly minimaluserinteraction.Thismanualinteractionwould consistof the selectionof a fewclearlydefinedlandmarksandcould thereforebecarriedoutalsoby non-experts. Thesegmentationitself would thenrunfully automatically. Suchan elasticdeformationprocedure
restrictedby prior knowledgeabout the deformationrangewould also find applicationsin tr� acking problems,Ñ whereobjectsoncedefinedwith a relatively high expensecouldbeautomaticallytrackedin dynamicimagesequences.
ACKNOWLEDGEMENTS
The authors thank Ron Kikinis (Brigham and Women’sHospital, Harvard Medical School, Boston) for organizingthe MR acquisitionsand for discussionsin regard to theclinical needsfor robust 3-D imagesegmentation. MarthaShenton(Brain Imaging Laboratory, Dept. of Psychiatry,HarvardMedicalSchool,Boston)is kindly acknowledgedforproviding theMR dataandthemanuallysegmented3-D data.
REFERENCES
Brechbuhler, C., Gerig, G. and Kubler, O. (1992) Surfaceparametrizationõ andshapedescription.In Pr
öoc. VBC’92 Conf.,
pp.õ 80–89.
Brechbuhler, C., Gerig, G. andKubler, O. (1995)Parametrizationof closedsurfacesfor 3-D shapedescription.CVGIP: ImageUnderstanding, 61,154–170.
Cohen,I., Cohen,L. D. andAyache,N. (1992)Using deformablesurfacesto segment3-D imagesandinfer differentialstructures.CVGIP: ImageUnderstanding, 56,242–263.
Cootes,T. F. andTaylor, C. J. (1992)Active shapemodels– ‘smartsnakes’. In Pr
öoc. British Mach. Vision Conf. ’92, pp. 266–275,
Springer.
Cootes,T. F., Hill, A., Taylor, C. J. and Haslam,J. (1993) TheUseof ActiveShapeModelsFor LocatingStructuresin MedicalImaging.In Proc. IPMI’93, pp.33–47,Flagstaff USA.
Gerig,G.,Martin,J.,Kikinis, R.,Kubler, O.,Shenton,M. andJolesz,F. (1991)AutomaticSegmentationof Dual-EchoMR HeadData.In Pr
öoc. IPMI’91 (Wye), pp.175–187.
Greiner, W. andDiehl, H. (1964)TheoretischePhysik– Ein Lehr-undUbungsbuchfurAnfangssemester, Band3: Elektrodynamik,VerlagHarri Deutsch,ZurichundFrankfurtamMain,pp.61–65.
Hermann,G. T. andLiu, H. K. (1979)Three-dimensionaldisplayofhumanorgansfrom computertomograms.CGIP, 9, 1–21.
Hill, A. andTaylor, C. J. (1992)Model-basedimageinterpretationusinggeneticalgorithms.Ima
÷geVisionComp., 10,295–300.
Hill, A., Cootes,T. F. andTaylor, C. J. (1992)A GenericSystemforImageInterpretationUsingFlexible Templates.In Proc.BritishMach. VisionConf.’92, pp.276–285,Springer.
Hill, A., Thornham, A. and Taylor, C. J. (1993) Model-BasedInterpretationof 3-D Medical Images.In Pr
öoc. British Mach.
VisionConf.’93, pp.239–348,BMVC Press.
Kass,M., Witkin, A. and Terzopoulos,D. (1988) Snakes: activecontourmodels.Int.
÷J. Comp.Vision, 1, 321–331.
Kuhl, F. P. andGiardina,C. R. (1982)Elliptic Fourier featuresof aclosedcontour. CVGIP, 18,236–258.

34 G. Szek� ely et� al.
Martin, J., Pentland, A. andKikinis, R. (1994)ShapeAnalysisofBrain StructuresUsing Physicaland ExperimentalModes. InPr
öoc.CVPR’94, pp.752–755.
NAG FortranLibrary Manual– Mark 13,(1988)1stedn.Nastar, C. andAyache,N. (1994)Classificationof NonrigidMotion
in 3-D ImagesusingPhysics-BasedVibrationAnalysis.In Prö
oc.IEEE
÷WorkshoponBiomed.ImageAnal., pp.61–69,Seattle,WA.
Neuenschwander, N., Fua, P., Szekely, G. and Kubler, O. (1994)Initializing Snakes.In Proc. CVPR’94,IEEE ComputerSocietyConf. on ComputerVisionandPatternRecognition, June21–23,Seattle,WA. pp.658–663.
Pentland,A. and Sclaroff, A. P. (1991) Closed-formsolutionsforphysicallyõ basedshapemodellingandrecognition.IEEE PAMI,13,715–729
Persoon,E. andFu,K. S.(1977)ShapediscriminationusingFourierdescriptors.IEEETrans.SMC, 7, 170–179.
Reeves,C. R. (ed.)(1993)ModernHeuristicTechniquesfor Combi-natorial Problems. Blackwell,Oxford.
Sclaroff, S. and Pentland,A. P. (1994) On Modal Modelling forMedicalImages:UnderconstrainedShapeDescriptionandDataCompression.In Pr
öoc.IEEEWorkshoponBiomed.ImageAnal.,
pp.õ 70–79,Seattle,WA.Staib, L. H. and Duncan, J. S. (1992a) Boundary finding with
parametricallyõ deformablemodels.IEEE÷
PAMI 14,1061–1075.Staib,L. H. andDuncan,J. S. (1992b)DeformableFouriermodels
for surfacefinding in 3-D images.In Prö
oc. VBC’92 Conf., pp.90–194.
Terzopoulos,D. andMetaxas,D. (1991)Dynamic3-D modelswithlocalandglobaldeformations:deformablesuperquadrics.IEEEPAMI, 13,703–714.
Terzopoulos,D., Witkin, A. andKass,M. (1988)Symmetry-seekingmodelsand3-D object reconstruction.Int. J. Comp.Vision, 1,211–221.
Vemuri,B.C.andRadisavljevic,A. (1994)Multiresolutionstochastichybrid shapemodelswith fractalpriors.A
øCM Trans.Graphics,
13,177–20.





























