-
Cedric Schmelzbach(1), Nienke Brinkman(1), David Sollberger(1),
Sharon Kedar(2),Matthias Grott(3), FredrikAndersson(1), Johan
Robertsson(1), Martin van Driel(1),
Simon Stähler(1), Jan ten Pierick(1), Troy L. Hudson(2), Kenneth
Hurst(2), Domenico Giardini(1), Philippe Lognonné(4), W. Tom
Pike(5), Tilman Spohn(3), W. Bruce Banerdt(2),
Lucile Fayon(4), Anna Horleston(6), Aaron Kiely(2), Brigitte
Knapmeyer-Endrun(7), Christian Krause(3), Nicholas C. Schmerr(8),
Pierre Delage(9), Nick Teanby(6), Christos Vrettos(10)
(1) ETH, Zurich, Switzerland; (2) Jet Propulsion Laboratory,
California Institute of Technology, USA; (3) Deutsches Zentrum für
Luft und Raumfahrt, Germany; (4) Institut de Physique du Globe de
Paris, France; (5)
Imperial College, London, UK; (6) University of Bristol,
Bristol, UK; (7) University of Cologne, Germany; (8) University of
Maryland, USA; (9) Ecole des Ponts, France; (10) Technical
University Kaiserslautern, Germany.
EGU2020-20481
Seismic investigations of the Martian near-surface at the
InSight landing site
-
Motivation – “Active-source” near-surface seismic study
Credit: NASA/JPL
SEISHP3
Sol 124
Credit: NASA/JPL
May 1 2020Sol 508
• The Heat Flow and Physical Properties Package (HP3) was
deployed close to seismometer package (SEIS) in mid-February
2019
• HP3 mole is a self hammering device producing seismic waves
with each hammer stroke
• The seismic signals may allow infering on the shallow elastic
properties to (Kedar et al., 2017):– Study the geological
structure, composition and
history at the landing site– Understand the seismic noise
recorded by SEIS– Provide regolith properties for future
missions
1.18 m
Schmelzbach et al. (2020), EGU2020-20481
-
Proposed seismic analyses to study the near-surfaceSeismic
traveltimes• The traveltime of the wave arriving first
at SEIS can provide information on the subsurface seismic
velocity structure (Brinkman et al., 2019)
Subsurface reflection imaging• Reflected waves may be used to
image
shallow interfaces analogoues to vertical seismic profiling
(Golombek et al., 2018; Brinkman et al., 2020)
• Requires the mole to penetrate into the subsurface
Keary et al. (2002)
Vertical-seismic profiling (VSP)
HP3 SEIS
Golombek et al. (2018)
Velocity (m/s)
Velocity model from a synthetic data test
Dep
th (m
)
Brinkman et al. (2019)
Seismic reflection imaging illustrated with synthetic data
Schmelzbach et al. (2020), EGU2020-20481
-
Challenges of this opportunistic experiment
• The analysis of the HP3 seismic signals is an opportunistic
experiment that was only conceived after the key hardware decisions
were made (Kedar et al. 2017)
• Time-resolution challenge: the SEIS acquisition flow is
designed for seismic signals with frequencies 100 Hz (Sollberger et
al., 2020)
• Time-correlation challenge: SEIS and HP3 operate on
independent clocks that need to be correlated to determine the
traveltimes of the seismic waves precisely enough for the proposed
analyses (Brinkman et al., 2019)
Schmelzbach et al. (2020), EGU2020-20481
-
Reconstruction of information beyond Nyquist frequencyThe HP3
hammering seismic signals are observed to have a much broader
frequency content then the nominal SEIS acquisition electronics is
designed to record.
The first active seismic experiment on Mars to characterize the
shallow subsurface structure
100 sps dataInverse Radon transform and
down-sampling
50 100 150Hammer stroke no. Hammer stroke no.
0
0.05
0.1
0.15
0.2
0.25
Tim
e (s
)
Hammer stroke no.50 100 150
(a) (d)
50 100 150
(b)
Hammer stroke no.50 100 150
(c)
0
0.1
0.2
50 100Hammer stroke no.
Tim
e (s
)
150
0
0.1
0.2
Tim
e (s
)
50 100Hammer stroke no.
15050 100 150Hammer stroke no. Hammer stroke no. Hammer stroke
no.
0
0.05
0.1
0.15
0.2
0.25
Tim
e (s
)
50 100 150 50 100 150Hammer stroke no.
50 100 150
(a) (b) (c) (d)
40 60 80 100 120
500
1000
1500
2000
2500
3000
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0
0.1
0.2Int
erce
pt ti
me
(
s)
-0.5 0Slowness p (s/m)
0.5 50 100Hammer stroke no.
15050 100 150Hammer stroke no. Hammer stroke no. Hammer stroke
no.
0
0.05
0.1
0.15
0.2
0.25
Tim
e (s
)
50 100 150 50 100 150
(a) (b) (c) (d)
0
0.1
0.2
Tim
e (s
)
Fully sampled, unfiltered dataSparse, fully sampled, Radon
domain model
Signal maps to p values close to zero (horizontal lines)
Reconstructed signal
Inverse Radon transform
Compare and update model
Spike filter
+ down-sampling to 100sps
a) b) c) d)
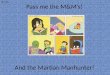
Figure 4: Illustration of the reconstruction algorithm used to
recover the high-frequency information from fully aliased
seismicdata recorded during HP3 hammering. The example is from an
actual analogue field experiment conducted in the Nevada desertwith
a spare model of the mole. a) Input seismic data before passing
through the on-board down-sampling flow. b) Aliased
datadown-sampled to 100 Hz aligned to the hammering time. Note the
quasi-random subsampling of the common-receiver gather. c)Sparse,
fully-sampled Radon model of the data. d) Reconstructed signal.
100 Hz. To avoid aliasing, the data are passed through a
dig-ital anti-aliasing FIR filter that only passes information
below50 Hz. However, the HP3 mole is expected to generate
seismicsignals at frequencies much higher than 50 Hz.
To record information >50 Hz that of the hammering signals,we
designed a new FIR filter (in the following referred to asthe spike
filter) that is uploaded to the lander during mole ham-mering. The
spike filter has a flat frequency response and thuspasses all the
information contained in the hammering signal.As a consequence, the
down-linked data is aliased. The signalsneed to be reconstructed in
post-processing to recover the highfrequency information.
We developed a compressed sensing inspired algorithm
(e.g.Donoho, 2006; Candès et al., 2006) that allows to
accuratelyrecover the high-frequency signals beyond the nominal
Nyquistfrequency of 50 Hz (Sollberger et al., 2019).
Compressedsensing allows the recovery of sparse signals way beyond
theNyquist limit. The concept of the reconstruction algorithm
isillustrated in Figure 4. Our reconstruction algorithm exploitsthe
fact that the hammering signal of the mole is highly repeat-able.
Thousands of very similar signals are recorded as themole slowly
penetrates into the regolith. As a result, the datashow a linear
structure when arranged in a common-receivergather with each hammer
stroke aligned with respect to thehammer time (Figure 4a).
HP3 time samples are not identical to the time sample on
SEIS.Each of the repeated signals is sub-sampled differently
(Fig-ure 4b). This is an ideal prerequisite for compressed
sensing.Due to the linear structure, the data has a sparse
representationin the Radon transform domain. Instead of the
conventionalRadon transform, we use the so-called deconvolutive
Radontransform (Gholami, 2017), which allows for an even
sparserrepresentation of the signal. Each linear event in the 2D
data iseffectively compressed to a point in the deconvolutive
Radondomain (Figure 4). Reconstruction is then achieved by
findingthe sparsest model (the model with smallest `1-norm) that
fits
the aliased data. This is achieved by solving a basis pursuit
de-noising problem (BPDN). The reconstructed, up-sampled sig-nal
can then simply be found in the time domain by applyingthe inverse
deconvolutive Radon transform to the best-fittingRadon-domain model
parameters (Figure 4).
SEISMIC-DATA PROCESSING
The reconstructed, up-sampled seismic data and accurate trig-ger
times enable a high resolution analysis of the data. First-arrival
P-wave travel times and the seismic waveforms are usedfor seismic
tomography and reflection processing, respectively.
In order to test the imaging potential of the HP3-SEIS ac-tive
seismic experiment, we demonstrate the processing ona synthetic
dataset. We used finite-difference modelling togenerate a synthetic
dataset using the petrophysical model ofthe shallow Martian
subsurface (B. Knapmeyer-Endrun, per-sonal communication). We then
picked the first-arriving P-wave travel times and applied a
non-linear seismic traveltimetomography based on Bayesian inference
which allows to quan-tify uncertainties and non-linearities in the
model. The methodthat we applied is the reversible jump Markov
chain MonteCarlo (rj-MCMC) algorithm which allows the model space
tobe transdimensional. The parameterization of the model spaceis
defined by Voronoi cells (Okabe et al., 2009). During eachiteration
step of the Markov chain, four different perturbationsto the model
are possible (Bodin and Sambridge, 2009). Threeof those
perturbations imply a change in the parameterization,a ”birth” step
creates a new Voronoi cell, a ”death” step re-moves a Voronoi cell
and a ”move” step rearranges the Voronoicells. The fourth possible
perturbation is a velocity step, whichproposes a velocity parameter
and does not influence the pa-rameterization. The forward problem
of the first-arrival trav-eltime computation is solved using the
Fast Marching method(Rawlinson and Sambridge, 2004).
Figure 5a represents the posterior density functions (PDFs)
in
We therefore developed an acquisition and signal reconstruction
flow that includes (1) recording aliased data by omitting filters
when downsampling the data for transfer from Mars to Earth and (2)
reconstructing the original signals using a sparseness-constrained
reconstruction algorithm that exploits the high repeatability of
the hammering signalsand uncorrelated hammer time and sampling
(Sollberger et al., 2020).
Brinkman et al. (2019)
Sollberger et al. (2020)
Schmelzbach et al. (2020), EGU2020-20481
-
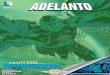
First results – Hammering session 4 (sol 158)
• The seismic data of the SEIS short period (SP) sensor were
recorded in aliased fashion for several HP3hammering sessions
• First-arrival traveltimes were determined from the
reconstructed data
• An apparent velocity of 124 ± 34 m/s was obtained for
hammering session 4(Lognonné et al., 2020)
Figure S2-2: Schematic cross-section of the locations of HP3,
the mole with the mole tip in red and SEIS with respect to each
other. s is the travel path, x is the horizontal distance between
SEIS and HP3, d is the depth of the mole and θ is the tilt of the
mole with respect to the vertical.
(a) Hammer Session 3
(b) Hammer Session 3
(c)Hammer Session 4
(d) Hammer Session 4
Figure S2-3: (a) and (c): Seismic data recorded by the short
period sensor (SP) of SEIS arranged as a common-receiver gather
with time zero corresponding to the trigger time of each hammer
hit. (b) and (d): Travel time and P-velocity analysis recorded by
the SP.
S2-3: Convective vortex modelling
Convective vortices are characterized by a pressure drop,
typically of a few tenths to a few Pa, that induces small
deformations of the ground that can be felt by the sensitive VBB
seismometer. On the vertical component, the quasi-static ground
motion can be modeled based on the pressure and wind time series
and the frequency-dependent ground compliance (the ratio between
vertical velocity and pressure forcing). The frequency dependency
is related to the sensitivity depth to elastic properties, which
scales
SEIS
Mole
Mole tip
θ
x
sd
HP3
Hammer Session 3 (SP Sensor)
03:51 03:53 03:55 03:58 04:00 04:03
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
U (C
ount
s)
10 5
03:51 03:53 03:55 03:58 04:00 04:03
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
V (C
ount
s)
10 5
03:51 03:53 03:55 03:58 04:00 04:0303/28/19
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
W (C
ount
s)
10 5
0 50 100 150 200Hammer stroke number
0
0.005
0.01
0.015
0.02
Trav
eltim
e (s
)
SP t P -picks
0 0.005 0.01 0.015 0.02TravelTime (s)
0
5
10
15
Cou
nt
t P: Mean: 0.00962 Median: 0.00985 STD: 0.00283
0 20 40 60 80 100 120 140 160 180 200Hammer stroke number
0
50
100
150
200
Velo
city
(m/s
)
SP: Hammer HitsSP: Mean: 118SP: STD: 38.7
Hammer Session 4 (SP Sensor)
08:02 08:04 08:07 08:09 08:12 08:14
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
U (C
ount
s)
10 5
08:02 08:04 08:07 08:09 08:12 08:14
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
V (C
ount
s)
10 5
08:02 08:04 08:07 08:09 08:12 08:1405/08/19
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
W (C
ount
s)
10 5
0 50 100 150 200Hammer stroke number
0
0.005
0.01
0.015
0.02
Trav
eltim
e (s
)
SP t P -picks
0 0.005 0.01 0.015 0.02TravelTime (s)
0
5
10
15
20
Cou
nt
t P: Mean: 0.00918 Median: 0.00954 STD: 0.00253
0 20 40 60 80 100 120 140 160 180 200Hammer stroke number
0
50
100
150
200
Velo
city
(m/s
)
SP: Hammer HitsSP: Mean: 124SP: STD: 37.6
Figure S2-2: Schematic cross-section of the locations of HP3,
the mole with the mole tip in red and SEIS with respect to each
other. s is the travel path, x is the horizontal distance between
SEIS and HP3, d is the depth of the mole and θ is the tilt of the
mole with respect to the vertical.
(a) Hammer Session 3
(b) Hammer Session 3
(c)Hammer Session 4
(d) Hammer Session 4
Figure S2-3: (a) and (c): Seismic data recorded by the short
period sensor (SP) of SEIS arranged as a common-receiver gather
with time zero corresponding to the trigger time of each hammer
hit. (b) and (d): Travel time and P-velocity analysis recorded by
the SP.
S2-3: Convective vortex modelling
Convective vortices are characterized by a pressure drop,
typically of a few tenths to a few Pa, that induces small
deformations of the ground that can be felt by the sensitive VBB
seismometer. On the vertical component, the quasi-static ground
motion can be modeled based on the pressure and wind time series
and the frequency-dependent ground compliance (the ratio between
vertical velocity and pressure forcing). The frequency dependency
is related to the sensitivity depth to elastic properties, which
scales
SEIS
Mole
Mole tip
θ
x
sd
HP3
Hammer Session 3 (SP Sensor)
03:51 03:53 03:55 03:58 04:00 04:03
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
U (C
ount
s)
10 5
03:51 03:53 03:55 03:58 04:00 04:03
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
V (C
ount
s)
10 5
03:51 03:53 03:55 03:58 04:00 04:0303/28/19
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
W (C
ount
s)
10 5
0 50 100 150 200Hammer stroke number
0
0.005
0.01
0.015
0.02
Trav
eltim
e (s
)
SP t P -picks
0 0.005 0.01 0.015 0.02TravelTime (s)
0
5
10
15
Cou
nt
t P: Mean: 0.00962 Median: 0.00985 STD: 0.00283
0 20 40 60 80 100 120 140 160 180 200Hammer stroke number
0
50
100
150
200
Velo
city
(m/s
)
SP: Hammer HitsSP: Mean: 118SP: STD: 38.7
Hammer Session 4 (SP Sensor)
08:02 08:04 08:07 08:09 08:12 08:14
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
U (C
ount
s)
10 5
08:02 08:04 08:07 08:09 08:12 08:14
0
0.5
1
1.5
Tim
e (s
)
-2
0
2
V (C
ount
s)
10 5
08:02 08:04 08:07 08:09 08:12 08:1405/08/19
0
0.5
1
1.5
Tim
e (s
)
-2
-1
0
1
2
W (C
ount
s)
10 5
0 50 100 150 200Hammer stroke number
0
0.005
0.01
0.015
0.02
Trav
eltim
e (s
)
SP t P -picks
0 0.005 0.01 0.015 0.02TravelTime (s)
0
5
10
15
20
Cou
nt
t P: Mean: 0.00918 Median: 0.00954 STD: 0.00253
0 20 40 60 80 100 120 140 160 180 200Hammer stroke number
0
50
100
150
200
Velo
city
(m/s
)
SP: Hammer HitsSP: Mean: 124SP: STD: 37.6
1.18 m
q = 20°
0.32
m
1.11 m
Lognonné et al. (2020)Schmelzbach et al. (2020),
EGU2020-20481
-
Interpretation• Observed low (~120 m/s) seismic P-wave velocity
interpreted to represent
the bulk velocity of the volume between HP3 mole tip and
SEIS
• Low velocity consistent with proposed near-surface
stratigraphy (Golombek et al., 2020) of >3 m thick
impact-fragmented regolith consisting of poorly sorted
unconsolidated sands and rocks
• A near-surface velocity model is under construction based on
the HP3-SEIS traveltime and compliance inversions using atmospheric
pressure signals (Lognonné et al., 2020)
Credit: NASA/JPLSchmelzbach et al. (2020), EGU2020-20481
-
References• Brinkman et al. (2019), The first active-seismic
experiment on Mars to characterize the
shallow subsurface structure at the InSight landing site, SEG
Technical Program Expanded Abstracts 2019, 4756–4760,
doi:10.1190/segam2019-3215661.1
• Golombek et al. (2020), Geology of the InSight landing site on
Mars. Nature Communications 11, 1014 doi:
10.1038/s41467-020-14679-1
• Golombek et al. (2018), Geology and Physical Properties In-
vestigations by the InSightLander, Space Science Review, 214(5),
84, doi: 10.1007/s11214-018-0512-7.
• Kedar et al. (2017), Analysis of Regolith Properties Using
Seismic Signals Generated by InSight’s HP3 Penetrator. Space
Science Reviews, 211, 315–337, doi: 10.1007/s11214-017-0391-3
• Lognonné et al. (2020), Constraints on the shallow elastic and
anelastic structure of Mars from InSight seismic data, Nature
Geoscience, 13(3), http://doi.org/10.1038/s41561-020-0536-y
• Sollberger et al. (2020), A reconstruction algorithm for
temporally aliased seismic signals recorded by the InSight Mars
lander, submitted to Earth and Space Science.
Schmelzbach et al. (2020), EGU2020-20481