Embed Size (px)
Citation preview

Ahmed CHEMORI Laboratoire d’Informatique, de Robotique et de Microélectronique de Montpellier
LIRMM, Université Montpellier 2 - CNRS 161, rue Ada 34095 Montpellier, France
Email : [email protected] URL : http://www.lirmm.fr/~chemori/
Nîmes , le 27 Novembre 2014
Séminaire

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 2
Plan de la présentation
1. Introduction à l’asservissement
2. La commande d’un robot (principe/dynamique/classification)
3. Les approches non basées modèle (Décentralisées)
La commande PD linéaire
La commande PID linéaire
La commande PD non linéaire
4. Les approches basées modèle (Centralisées)
La commande PD avec compensation de gravité
La commande PD augmenté (PD+)
La commande PD augmenté non linéaire
La commande PD avec feedforward pré-calculé
La commande par couple calculé (dynamique)
La commande dynamique à correction non linéaire
5. Exemple d’une commande avancée : Mode glissant
6. Références bibliographiques

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 3
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 4
Identification Modélisation
Choix de la commande
Synthèse du correcteur
Essais expérimentaux
Modélisation du processus Lois de la physique et/ou essais en BO/BF
Continue ? Echantillonnée ? Quelle stratégie de calcul ?
Choix des paramètres du régulateur REGLAGE
Validation par simulation et essais en temps-réels
Synthèse d’un asservissement
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 5
Stabilité (il faut que le système en boucle fermée soit stable)
Précision (par exemple une valeur max sur l’erreur de position p<Seuil )
Rapidité (valeur max sur le temps de monté tm<Seuil )
Robustesse (marges de stabilité, par exemple Mp>Seuil )
Dépassement (valeur max sur le 1ier dépassement d%<Seuil )
Rejet de perturbations (annuler l’effet de la perturbation sur la sorite)
La synthèse d’un asservissement doit toujours répondre à certaines exigences. Ces
dernières sont appelées cahier des charges.
Un cahiers des charges d’une boucle de régulation, impose en boucle fermée :
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 6
Les systèmes peuvent présenter des défauts
Exemples : Une précision insuffisante, une stabilité faible (voir une instabilité),
un temps de réaction trop lent, un dépassement trop important, etc
Il est souvent nécessaire d’intégrer dans le système asservis un correcteur
L’objectif est alors d’améliorer un ou plusieurs de ces différents paramètres
Sans bien évidement le faire au détriment des autres.
On considère un système asservi défini par le schéma bloc suivant :
L’idée de base consiste à introduire dans la chaîne directe, en amont du système un
dispositif supplémentaire de fonction de transfert C(p)
Ce dispositif est appelé correcteur, contrôleur , compensateur ou encore régulateur.
Le rôle du correcteur consiste à modifier les performances du système initial (précision,
stabilité, rapidité, . . . etc).
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 7
Système Contrôleur Consigne
ou référence
Sortie +
-
La commande L’erreur
Le contrôleur est le cœur de la boucle de commande
En se basant sur l’erreur entre la consigne et la sortie, le régulateur calcule la
commande pour que la sortie suive la consigne
Le rôle du correcteur consiste à modifier les performances du système initial (précision,
stabilité, rapidité) pour les améliorer.
Ce qui donnera le système asservi représenté par le schéma bloc suivant :
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 8
La fonction de transfert en boucle fermée du système corrigé est donnée par :
L’objectif de la correction (le contrôle ou la commande) consiste à choisir la bonne
fonction de transfert C(p) du correcteur de manière à régler chaque performance sur
sa valeur requise, sans perturber le fonctionnement du système.
Les correcteurs sont généralement constitués de dispositifs électroniques qui peuvent
souvent être simples.
Néanmoins, quand le cahier des charges est très exigeant, il faut parfois faire appel à
des correcteurs plus sophistiqués donc plus coûteux et même parfois délicats à régler.
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 9
En automatique, il existe trois actions correctives élémentaires qui permettent,
individuellement, de corriger telle ou telle performance.
Ces trois actions sont :
L’action Proportionnelle (P)
L’action Intégrale (I)
L’action Dérivée (D)
Les actions de correction élémentaires
Ces actions sont relativement simple à réaliser mais, généralement, elles dégradent
d’autres performances.
Quand le cahier des charges est peu exigeant, ces actions suffisent largement à satisfaire
ce dernier.
Dans le cas contraire, il faut envisager de combiner ces différentes actions au sein d’un
correcteur plus complexe.
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 10
Ce correcteur élémentaire est le correcteur de base.
Il s’agit d’un simple amplificateur de gain réglable C(p) = K qui a pour objectif de
modifier le gain statique initial du système.
Le correcteur proportionnel
A remarquer, au passage, que l’influence du gain statique sur les performances du
système peut être résumé en deux cas de figure selon sa valeur :
K0 < 1 : il s’agit d’un atténuateur, et dans ce cas on améliore la stabilité du système et on
diminue son dépassement en boucle fermée. Cependant, la rapidité et la précision sont
dégradées.
K0 > 1 : il s’agit d’un amplificateur, et dans ce cas on améliore la rapidité et la précision
en boucle fermée, mais on diminue la stabilité (ce qui peut aller jusqu’à rendre le système
instable) et on augmente son dépassement.
Dans le cas d’un correcteur proportionnel, la loi de commande corrigée u(t) est
proportionnelle à l’erreur (t) (l’écart entre la référence et la sortie), a savoir u(t) = K(t),
et la fonction de transfert du correcteur s’écrit :
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 11
Un correcteur intégral est un correcteur dont la loi de commande u(t) est de la forme :
Sa fonction de transfert s’écrit donc :
Ce correcteur a pour objectif d’ajouter un pôle nul à la fonction de transfert en boucle
ouverte.
A remarquer qu’un système dont la fonction de transfert en boucle ouverte possède un
pôle nul sera caractérisée par une erreur de position nulle.
On peut dire, bien que cela n’ait aucun sens d’un point de vue physique, que le gain
statique du système en boucle ouverte tend vers l’infinie, ce qui corrobore la nullité de
l’erreur statique en boucle fermée, qui est inversement proportionnelle au gain statique
en boucle ouverte.
Le correcteur intégral
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 12
Le correcteur à action intégrale est censé améliorer la précision du système asservi.
Mais la question qui se pose étant la suivante : Ce correcteur modifie-t-il les autres
performances ?
Les modifications apportées à la fonction de transfert influencent sans doute les autres
performances du système.
En effet, ce correcteur introduit un déphasage de (-/2) et risque de rendre le système
instable (diminution de la marge de phase).
Par ailleurs il dégrade aussi les autres performances :
Augmenter le temps de montée ralentir le système en BF.
En ce qui concerne la réalisation électronique de ce type de correcteur, un réseau passif
(circuit RC) ne permet pas de le réaliser, cependant une bonne approximation peut être
réalisée avec un montage intégrateur à base d’amplificateurs opérationnels.
Le correcteur intégral
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 13
Un correcteur a action dérivée est un correcteur dont la commande u(t) est de la forme :
L’objectif de ce correcteur est d’ajouter un zéro nul à la fonction de transfert en boucle
ouverte.
L’effet de l’introduction de ce correcteur dans la boucle de commande diminue le temps
de montée donc il a tendance à accélérer le système en boucle fermée.
Par ailleurs il agit aussi sur les autres performances du système.
A titre d’exemple introduit un déphasage de (+/2).
En effet, la remontée de phase de (/2) peut avoir deux effets différents.
Sa fonction de transfert s’écrit donc :
Le correcteur à action dérivée
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 14
En effet, la remontée de phase de (/2) peut avoir deux effets différents :
Si le système possède un ordre élevé, le déphasage peut tendre vers des valeurs
négatives importantes, donc la remontée de la phase peut être sans effet sur
l’amélioration de la marge de phase, voir la dégrader et même parfois rendre le
système instable.
Si l’ordre du système est faible, la remontée de phase peut se traduire par une
nouvelle courbe qui tend vers une valeur située largement au dessus de (-).
D’autre par la précision du système, liée au gain statique, va être dégradée puisque le
gain aux basses fréquences diminue fortement.
Ce type de correcteur est purement théorique, un système physique ne peut pas avoir un
numérateur de degré supérieur au dénominateur.
Néanmoins, ils existent des correcteurs approchant, permettant d’avoir un effet dérivée.
Le correcteur à action dérivée
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 15
L’inconvénient majeur des actions correctives élémentaires est que leur action porte sur
l’ensemble du spectre de fréquences de 0 à l’infinie.
En effet toute action corrective élémentaire menée à un endroit précis pour corriger une
performance agit également à d’autres endroits en en dégradant d’autres performances.
Les correcteurs idéaux, s’ils existent, devront être caractérisés par une action localisée
en vue de corriger une des performances, sans influencer les autres.
A titre d’exemple :
Pour une meilleure précision, il faudrait pouvoir augmenter le gain statique mais
uniquement au voisinage des basses fréquences.
Pour une meilleur rapidité, il nous faudrait choisir une pulsation de coupure à
0dB un peu plus grande et pour améliorer la marge de phase, l’idéal serait de
pouvoir corriger la courbe de phase uniquement au voisinage de la fréquence
pour laquelle le gains en dB s’annule.
Pour atteindre de tels objectifs, une idée consiste à, par exemple, combiner les
correcteurs élémentaires, c’est ainsi qu’on obtient des correcteurs plus performants de
type PI, PD, ou PID.
Les inconvénients des correcteurs élémentaires
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 16
Le correcteur PID (Proportionnel-Intégral-Dérivé) est une combinaison d'un régulateur P,
un régulateur I et un régulateur D
L'intérêt du correcteur PID est d'intégrer les effets positifs des trois correcteurs
élémentaires (C’est le correcteur le plus utilisé en industrie)
La loi de commande u(t) s'exprime en fonction de l‘erreur comme suite :
Action Proportionnelle
Action Intégrale
Action Dérivée
Le correcteur PID
Où sont les gains du régulateur qu’il faut identifier afin de satisfaire un certain
cahier des charges relatif aux performances souhaitées en boucles fermée
Il existe de nombreuses méthodes pour trouver ces paramètres. Cette recherche de
paramètres est souvent appelée réglage
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 17
Le réglage d'un PID consiste à trouver les coefficients Kp , Ti et Td dans le but d'obtenir
une réponse adéquate du procédé et de la régulation.
L'objectif est d'être stable, rapide, précis et de limiter les dépassements.
Pour voir l'influence des paramètres du PID sur le système, on considère la réponse type
d’un système stable :
Le correcteur PID
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 18
Effet de
Lorsque augmente, le temps de montée devient plus court mais il y a un dépassement
plus important. Le temps d'établissement varie peu et l'erreur statique se trouve
améliorée.
Effet de
Lorsque augmente, le temps de montée devient plus court mais il y a un dépassement
plus important. Le temps d'établissement au régime stationnaire (temps de réponse)
s'allonge mais dans ce cas on assure une erreur statique nulle.
Effet de
Lorsque augmente, le temps de montée change peu mais le dépassement diminue. Le
temps d'établissement au régime stationnaire est meilleur. Pas d'influences sur l'erreur
statique.
Les paramètres du PID influencent la réponse du système de la manière suivante :
Le correcteur PID
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 19
L'analyse du système avec un PID est très simple mais sa conception peut être délicate
voir difficile car il n'existe pas de manière unique pour résoudre ce problème
Il faut trouver des compromis le régulateur idéal n'existe pas
En général on se fixe un cahier des charges à respecter sur la stabilité, la précision, le
dépassement et le temps de réponse, etc
Les méthodes de réglage les plus utilisées sont :
- La méthode de Ziegler-Nichols,
- La méthode de Halman
- La méthode de Naslin
- La méthode du lieu de Nyquist inverse
- La méthode de Cohen-Coon
- … etc
Réglage d’un PID
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 20
La méthode de Ziegler-Nichols consiste à :
1. Boucler le système avec un correcteur proportionnel pur
2. Augmenter progressivement le gain du correcteur proportionnel jusqu'à l'apparition
d’oscillations non amorties
3. Relever le gain limite Klim qui a provoqué les oscillations et mesurer leur période Tosc
4. Identifier les paramètres des correcteurs P, PI ou PID à l’aide du tableau ci-dessous :
Réglage d’un PID
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 21
Robot STÄUBLI
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 22
La commande de robots manipulateurs constitue un des axes prépondérants de
la recherche en robotique
Introduction
Selon la tâche à réaliser, le robot peut être
en espace libre ou en espace contraint
Les trajectoires à suivre peuvent être :
point à point ou interpolées
Introduction C.N.B.M C.B.M Mode glissant Références Commande
A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 23
Introduction
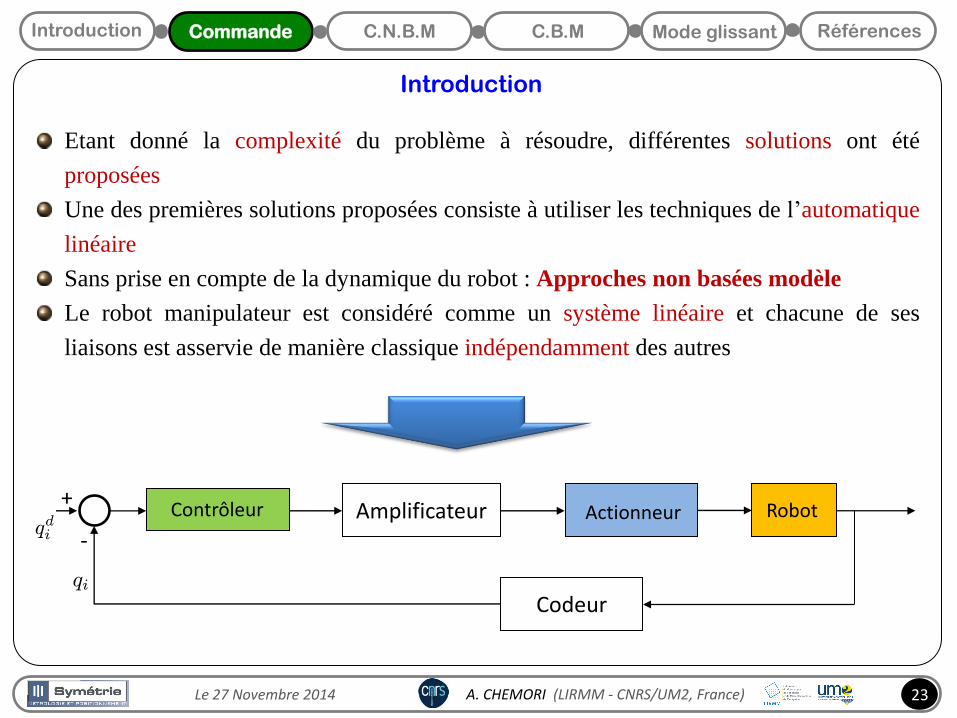
Etant donné la complexité du problème à résoudre, différentes solutions ont été
proposées
Une des premières solutions proposées consiste à utiliser les techniques de l’automatique
linéaire
Sans prise en compte de la dynamique du robot : Approches non basées modèle
Le robot manipulateur est considéré comme un système linéaire et chacune de ses
liaisons est asservie de manière classique indépendamment des autres
Robot Actionneur Contrôleur
Codeur
Amplificateur qdi
qi
+
-
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 24
La boucle de commande d’un robot
Actuators Input signal conditioning
and interfacing
output signal conditioning
and interfacing
Digital control architectures
Graphical displays Sensors
Mechanical system
ADC, Filters, Discrete
circuits, Amplifiers, …
DAC, PWM,
Amplifiers, …
LCD, LED, CRT, Digital
displays, …
Logic circuits, Microcontrollers, Computer, Control algorithm, …
Digital encoders, Position
sensors, MEMs, …
DC motors, Servo motors,
Electro valves, …
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 25
Les avantages des commandes non basées modèle réside dans leur simplicité
et leur faible coût d’implémentation
Les inconvénients d’une commande classique non basée modèle sont :
Ces méthodes sont fondées sur un modèle linéaire, or de part sa
dynamique, un robot est loin d’être un système linéaire !
La dynamique du robot varie avec sa configuration, et cette commande ne
sera pas en mesure de maintenir les performances du système
Il ne sera pas possible d’assurer la coordination des différents mouvement
de par l’indépendance des asservissements
La dynamique d’un robot est représenté par un ensemble d’équations
différentielles du 2nd ordre avec des termes non linéaires fortement couplés
Dans ces conditions on constate qu’un asservissement classique ne permet pas
d’obtenir et maintenir de bonnes performances du système
Une autre solution possible consiste à prendre en compte le modèle dynamique
du robot manipulateur Approches basées modèle
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 26
M(q)Äq+N(q; _q) _q+G(q) = ¿
La modélisation dynamique d’un robot est l’opération
permettant de construire un modèle de son évolution dans le
temps au travers une relation entre les forces/couples appliquées
et le mouvement résultant du robot.
Rappel de la dynamique d’un robot manipulateur
Il existe principalement deux formalismes de modélisation dynamique :
Lagrange et Newton-Euler
En espace libre (pas de contact entre l’effecteur du robot et l’environnement),
la dynamique d’un robot à n degrés de liberté s’écrit (frottements négligés) :
M(q) 2 Rn£n est la matrice d'inertie,
N(q; _q) 2 Rn£n est la matrice ce Coriolis,
G(q) 2 Rn est le vecteur de gravit¶e,
¿ 2 Rn est le vecteur de commande,
q 2 Rn est le vecteur des positions articulaires,
_q 2 Rn est le vecteur des vitesses articulaires,
Äq 2 Rn est le vecteur d'acc¶el¶erations articulaires.
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 27
Principales approches de commande de robots
Approches basées modèle
PID [ Cheng et al , 2003 ]
NPD [ Han et al , 1994 ]
Backstepping [ Wang et al 2009 ]
CT [ Luh et al , 1980 ]
APD (PD+) [Paden et al, 1988]
NAPD [ Shang et al , 2009 ]
NCT [ Shang et al , 2009 ]
DCAL [ Honegger et al , 2000 ]
Compensation intégrale adaptative [ Shang et al , 2009 ]
PD [Spong, 1989] PD-CG [Takegaki, 1981]
PD-FF [Craig, 1989]
Approches non basées modèle
Non adaptatives Adaptatives
NASF [Slotine et al, 1987]
Introduction C.N.B.M C.B.M Mode glissant Références Commande

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 28
CINCINNATI MILACRON T3
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 29
Commande PD en espace articulaire
+
- Robot
q
_q
Kp
Kd
_qd
qd +
-
~q
_~q ¿+
+
~q = (qd ¡ q) ; _~q = ( _qd ¡ _q)¿ =Kp(qd¡ q) +Kd( _qd¡ _q)
¿ =Kp~q+Kd_~q Kp ; Kd > 0
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 30
Commande PD en espace Cartésien
+
- Robot
q
_q
Kp
Kd
_Xd
Xd +
-
~X
_~X ¿+
+
J(q)T
J(q)
MGD
_X
X
F
~X = (Xd ¡X) ;_~X = ( _Xd ¡ _X)¿ =Kp(Xd ¡X) +Kd( _Xd ¡ _X)
¿ =Kp~X +Kd
_~X Kp ; Kd > 0
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 31
Commande PID en espace articulaire
~q = (qd ¡ q) ; _~q = ( _qd ¡ _q)
¿ =Kp(qd¡ q) +Kd( _qd¡ _q) +Ki
R( _qd ¡ _q)dt
¿ =Kp~q+Kd_~q+Ki
R~q(t)dt Kp ; Kd ; Ki > 0
+
-
Robot q
_q
Kp
Kd
_qd
qd +
-
~q
_~q
¿+
+
Ki
R~q
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 32
Commande PID en espace Cartésien
+
- Robot
q
_q
Kp
Kd
_Xd
Xd +
-
~X
_~X ¿+
+
J(q)T
J(q)
MGD
_X
X
F
~X = (Xd¡X) ;_~X = ( _Xd ¡ _X)
¿ =Kp(Xd ¡X) +Kd( _Xd ¡ _X) +Ki
R(Xd ¡X)dt
¿ =Kp~X +Kd
_~X +Ki
R~Xdt Kp ; Kd ; Ki > 0
Ki
R
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 33
Avantages et inconvénients
Avantages Inconvénients
Simplicité
Efficace en temps de calcul
Pas besoin du modèle du robot
Adéquates pour la plupart des tâches
Dynamique et couplage non pris en compte Efforts internes endommager le robot (chaines fermées) Forte consommation énergétique Mauvaise performances en hautes cadences
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 34
Commande non basées modèles non linéaires
Même structure que le contrôleur PD classique
Utilisation des gains variables
Dépendant de l’état du système, et d’autres paramètres
Les gais sont adaptés en fonction des performances du système en BF
Si l’erreur est importante gain est augmenté grande action de correction
Si l’erreur est faible gain est réduit action de correction réduite
Eviter les oscillations et les grands dépassements
Bonne performance en termes de rejet de perturbation
Robuste par rapport aux variations des paramètres
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 35
Commande PD non linéaire
Exemple :
Kp(~q) =
(Kpj~qj®1¡1 ; j~qj > ±1
Kp±®1¡11 ; j~qj · ±1
Kd( _~q) =
(Kdj _~qj®2¡1 ; j _~qj > ±2
Kd±®2¡12 ; j _~qj · ±2
+
- Robot
q
_q
Kd( _~q)
Kp(~q)
_qd
qd +
-
~q
_~q ¿+
+
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 36
Commande PD non linéaire
Exemple :
Kp(~q) =
(Kpj~qj®1¡1 ; j~qj > ±1
Kp±®1¡11 ; j~qj · ±1
Kd( _~q) =
(Kdj _~qj®2¡1 ; j _~qj > ±2
Kd±®2¡12 ; j _~qj · ±2
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 37
PD versus PD non linéaire
Exemple illustratif :
On considère la commande d’un système masse-ressort-amortisseur
PD linéaire :
PD non linéaire :
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 38
PD versus PD non linéaire
Exemple illustratif : Résultats de simulation
Evolution de la position Evolution de la commande
Introduction C.B.M Mode glissant Références Commande C.N.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 39
KUKA robot
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 40
Commande PD avec compensation de gravité
Basée sur la dynamique du robot :
Loi de commande :
Les deux premiers termes représentent les actions Proportionnelle et Dérivée
Les autres termes dépendent de la dynamique du robot
M(q)Äq+C(q; _q) _q+G(q) = ¿
¿ =Kp ~q+Kd_~q+G(q)
+
- Robot
q
_q
Kp
Kd
_qd
qd +
-
~q
_~q ¿+
+
G(q)
+
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 41
Commande PD avec compensation de gravité désirée
Basée sur la dynamique du robot :
Loi de commande :
Les deux premiers termes représentent les actions Proportionnelle et Dérivée
Les autres termes dépendent de la dynamique du robot et de la position désirée
M(q)Äq+C(q; _q) _q+G(q) = ¿
¿ =Kp ~q+Kd_~q+G(qd)
+
- Robot
q
_q
Kp
Kd
_qd
qd +
-
~q
_~q ¿+
+
G(qd)
+
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 42
Commande PD augmenté (PD+)
Basée sur la dynamique du robot :
Loi de commande :
Les deux derniers termes représentent les actions Proportionnelle et Dérivée
Les autres termes dépendent de la dynamique du robot et des trajectoires désirées
M(q)Äq+C(q; _q) _q+G(q) = ¿
¿ =M(q)Äqd +C(q; _q) _qd +G(q) +Kp ~q+Kd_~q
+
- Robot
q
_q
M(q)
Kp
Kd
Äqd
_qd
qd + C(q; _q) _qd +G(q)
-
~q
_~q ¿+
+ + +
+
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 43
Commande PD augmenté non linéaire
Même structure que le contrôleur PD augmenté
Utilisation des gains variables
Dépendant de l’état du système, et d’autres paramètres
Les gais sont adaptés en fonction des performances du système en BF
Loi de commande : ¿ =M(q)Äqd +C(q; _q) _qd + f(q; _q) +G(q) +Kp(¢) ~q+Kd(¢) _~q
Kp(~q) =
(Kpj~qj®1¡1 ; j~qj > ±1
Kp±®1¡11 ; j~qj · ±1
Kd( _~q) =
(Kdj _~qj®2¡1 ; j _~qj > ±2
Kd±®2¡12 ; j _~qj · ±2
+
- Robot
q
_q
M(q)Äqd
_qd
C(q; _q) _qd + f(q; _q) +G(q)
qd +
Kd( _~q)
Kp(~q)
-
~q
_~q ¿+
+ + +
+
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 44
Commande PD avec feedforward pré-calculé
Basée sur la dynamique du robot :
Loi de commande :
Les deux derniers termes représentent les actions Proportionnelle et Dérivée
Les termes dépendant de la dynamique en fonction des positions et vitesses désirées
M(q)Äq+C(q; _q) _q+ f(q; _q) +G(q) = ¿
¿ =M(qd)Äqd +C(qd; _qd) _qd + f(qd; _qd) +G(qd) +Kp ~q+Kd_~q
Avantage : Connaissant les trajectoires de référence
Les termes de feedforward peuvent être calculés hors ligne
Réduire considérablement le temps de calcul
Réduire l’effet de bruit de mesure
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 45
Commande PD avec feedforward pré-calculé
Contrôleur décentralisé
Robot
Valeur désirée Erreur
Valeur actuelle
Commande
Modèle dynamique
inverse
Compensation dynamique
Trajectoires désirées/actuelles
Avantages Inconvénients
Meilleur suivi des trajectoires de référence Faible consommation énergétique Gains de retour moins importants Prise en compte de la redondance et des non linéarités grâce au retour non linéaire
Nécessité d’un modèle dynamique précis (parfois indisponible) Architecture de commande plus complexe → besoin d’un calculateur performant Le bruit de mesure détériore encore plus la performance
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014
X
46
La commande dynamique est appelée ainsi car elle utilise le modèle
dynamique du robot
Elle est adapté à la commande des robots manipulateurs (même ceux à grandes
vitesse et à grande précision) du moment où le modèle dynamique est le plus
complet possible et que ses paramètres ont été bien identifiés
L’inconvénient majeur de cette commande est sa forte dépendance du modèle
dynamique pour être efficace, un calcul complet du modèle dynamique et
surtout une bonne identification de ses paramètres est nécessaire
Une commande dynamique peut être synthétisée :
1) Dans l’espace articulaire, ou
2) Dans l’espace cartésien
Avant de détailler ces approches, on rappelle le modèle dynamique d’un
robot manipulateur en espace libre
q = [q1 q2 q3]T
X = [x y z]T [Kelly 2005]
La commande dynamique
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 47
On rappelle la dynamique d’un robot (exprimée dans l’espace articulaire)
M(q)Äq+N(q; _q) _q+G(q) = ¿
La commande dynamique consiste à linéariser (linéarisation globale) avec un
retour d’état non linéaire
On considère l’objectif de synthèse d’une commande dynamique pour la
poursuite de trajectoires de référence dans l’espace articulaire :
Sur la position :
Sur la vitesse :
Sur l’accélération :
Soit la commande linéarisante suivante :
Remplacé dans la dynamique du robot donne le système linéarisé :
qd
_qd
Äqd
¿ =M(q)y+N(q; _q) _q+G(q)
Äq = y
Principe de base
La commande dynamique dans espace articulaire
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 48
On considère maintenant le choix suivant de :
où sont des matrices de gains de position et de vitesse (respectivement)
La dynamique résultante en boucle fermée s’écrit donc :
Si on considère la notation suivante des erreurs de poursuite (sur la position, sur
la vitesse, et sur l’accélération) :
La dynamique résultante en boucle fermée s’écrit en fonction de ces erreurs :
Cette dynamique représente un système autonome linéaire.
Pour montrer cela, on considère le vecteur d’état :
y = Äqd +Kd( _qd¡ _q) +Kp(qd¡ q)
Kp;Kd 2 Rn£n
y
Äq = y = Äqd +Kd( _qd¡ _q) +Kp(qd¡ q)
~q = (qd ¡ q) ; _~q = ( _qd ¡ _q) ; Ä~q = (Äqd ¡ Äq)
Ä~q+Kd_~q+Kp~q = 0
x =
µ~q_~q
¶
) _x =
µ_~qÄ~q
¶=
µ0 I
¡Kp ¡Kd
¶µ~q_~q
¶= Ax avec A =
µ0 I
¡Kp ¡Kd
¶
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 49
Si les matrices de gains de retour (de position et de vitesse ) sont définies
positives La matrice A est Hurwitz (à valeurs propres à partie réelle
négative) , donc le système est asymptotiquement stable, c.à.d. :
Exemple de choix des gains :
Kp Kd
8x0 ; limt!1
x(t) = 0
(q ! qd
_q ! _qd
_x=Ax(limt!1 ~q = 0
limt!1 _~q = 0
La condition de positivité des gain de retour garantit une convergence globale
asymptotique vers les trajectoires de référence.
C’est le choix des valeurs des matrices de gain de retour qui définira l’allure de
convergence vers les trajectoires de référence.
Kp =Diagf!2n1; : : : ; !2nng ; Kd =Diagf2»1!n1; : : : ;2»n!nng
Preuve de convergence
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 50
Commande dynamique en espace articulaire
+
- Robot
N(q; _q) _q+G(q)
+
+ q
_q
M(q)
Kp
Kd
Äqd
_qd
qd
y
+
-
~q
_~q
Compensation des non linéarités et découplage Partie linéaire de la commande
¿+
+ +
Schéma-bloc de la commande
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 51
On rappelle la dynamique d’un robot (exprimée dans l’espace articulaire)
M(q)Äq+N(q; _q) _q+G(q) = ¿
On considère l’objectif de synthèse d’une commande dynamique pour la
poursuite de trajectoires de référence dans l’espace cartésien
Sur la position :
Sur la vitesse :
Sur l’accélération :
Soit la commande linéarisante suivante :
Remplacé dans la dynamique du robot donne le système linéarisé :
xd
_xd
Äxd
¿ =M(q)y+N(q; _q) _q+G(q)
Principe de base
Äq = y
La commande dynamique dans espace Cartésien
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 52
x = f(q)
Soit les relations permettant le passage de l’espace articulaire à l’espace
cartésien, et en particulier :
_x = J(q) _q Äx = J(q)Äq+ _J(q; _q) _q
La dynamique résultante en boucle fermée s’écrit donc :
Les relations et donnent la dynamique résultante en boucle fermée en
fonction des erreurs de poursuite :
avec :
Qui représente une dynamique linéaire (idem au cas de l’espace articulaire).
y
y = J¡1(q)¡Äxd +Kd( _xd¡ _x) +Kp(xd¡ x)¡ _J(q; _q) _q
¢
Kp;Kd
Ä~x+Kd_~x+Kp~x = 0
Äq = y = J¡1(q)¡Äxd +Kd( _xd ¡ _x) +Kp(xd ¡ x)¡ _J(q; _q) _q
¢
Äq = J¡1(q)(Äx¡ _J(q; _q) _q) (¤)
(¤¤)
(¤) (¤¤)
~x= (xd ¡x) ; _~x= ( _xd ¡ _x) ; Ä~x= (Äxd¡ Äx)
On considère maintenant le choix suivant de :
où sont des matrices de gains de position et de vitesse (respectivement)
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 53
Si les matrices de gains de retour (de position et de vitesse ) sont définies
positives La matrice A est Hurwitz (à valeurs propres à partie réelle
négative) , donc le système est asymptotiquement stable, c.à.d. :
Kp Kd
8X0 ; limt!1
X(t) = 0
(x! xd
_x! _xd
_X = AX
(limt!1 ~x = 0
limt!1 _~x = 0
La condition de positivité des gain de retour garantit une convergence globale
asymptotique vers les trajectoires de référence.
C’est le choix des valeurs des matrices de gain de retour qui définira l’allure de
convergence vers les trajectoires de référence.
) _X =
µ_~xÄ~x
¶=
µ0 I
¡Kp ¡Kd
¶µ~x_~x
¶= AX avec A =
µ0 I
¡Kp ¡Kd
¶X =
µ~x_~x
¶Preuve de convergence
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 54
Commande dynamique en espace cartésien
+
- Robot
N(q; _q) _q+G(q)
+
+ q
_q
M(q)
Kp
Kd
Äxd
_xd
xd
y
+
-
~x
_~x ¿J¡1(q)
_J(q; _q)
+
+ + -
f(¢)x
J(q)_x
Schéma-bloc de la commande
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 55
JÄq+mgl sin(q) = ¿
On considère l’exemple d’un robot manipulateur à 1 ddl
Son modèle dynamique s’écrit :
[Kelly 2005] Application d’une commande dynamique en espace articulaire
Objectif : suivi des trajectoires de référence suivantes
Position désirée
Vitesse désirée
Accélération désirée
0 0.5 1 1.5 2 2.5-10
0
10q
d [
De
g]
0 0.5 1 1.5 2 2.5-100
0
100
dq
d [
De
g/s
ec]
0 0.5 1 1.5 2 2.5-500
0
500
Time [sec]
ddq
d [
De
g/s
ec2
]
Exemple d’application
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 56
¿ = J³Äqd +Kp(qd ¡ q) +Kd( _qd ¡ _q)
´+mgl sin(q)
La lois de commande s’écrit :
On considère les gains suivants :
[Kelly 2005]
Position articulaire
Vitesse articulaire
Signal de commande
Kp= 10 ; Kd = 10
Résultats d’application de la commande
Accélération articulaire
Condition initiale : ¡q(0) ; _q(0)
¢= (20± ; 0±=s)
La convergence est lente !
0 0.5 1 1.5 2 2.5-20
0
20
q [
De
g]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-100
0
100
dq [
Deg
/sec]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-500
0
500
Time [sec]
ddq
[D
eg
/se
c2]
Désirée
Réelle
0 0.5 1 1.5 2 2.50
5
10
Time [sec]
Tau
[N
.m]
Exemple d’application
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 57
On considère maintenant les gains suivants :
[Kelly 2005]
Position articulaire
Vitesse articulaire
Signal de commande
Kp= 500 ; Kd = 40
Résultats d’application de la commande
Accélération articulaire
0 0.5 1 1.5 2 2.5-20
020
q [
De
g]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-100
0100
dq [
Deg
/sec]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-101
x 104
Time [sec]ddq
[D
eg
/se
c2]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-100
0100
Time [sec]
Tau
[N
.m]
La même condition initiale que précédemment
La convergence est beaucoup plus rapide (meilleure)
Exemple d’application
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 58
On souhaite maintenant une convergence assimilée à
celle d’un système d’ordre 2 dont les paramètres sont :
[Kelly 2005]
Position articulaire
Vitesse articulaire
Signal de commande
Kp= !2n = 2500 ; Kd = 2»!n = 80
Résultats d’application de la commande
Accélération articulaire
La même condition initiale que précédemment
Convergence encore meilleure MAIS commande plus importante! (compromis)
!n = 50 ; » = 0:8
0 0.5 1 1.5 2 2.5-20
020
q [
De
g]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-500
0500
dq [
Deg
/sec]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-505
x 104
Time [sec]ddq
[D
eg
/se
c2]
Désirée
Réelle
0 0.5 1 1.5 2 2.5-500
0500
Time [sec]
Tau
[N
.m]
Exemple d’application
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 59
Commande Dynamique à correction non linéaire
Même structure que la commande dynamique
Utilisation des gains variables identique au cas de PD non linéaire
Dépendant de l’état du système, et d’autres paramètres
Les gais sont adaptés en fonction des performances du système en BF
Loi de commande : ¿ =M(q)£Äqd +Kp(~q) ~q+Kd( _~q) _~q
¤+C(q; _q) _q+ f(q; _q) +G(q)
Kp(~q) =
(Kpj~qj®1¡1 ; j~qj > ±1
Kp±®1¡11 ; j~qj · ±1
Kd( _~q) =
(Kdj _~qj®2¡1 ; j _~qj > ±2
Kd±®2¡12 ; j _~qj · ±2
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 60
+
- Robot
N(q; _q) _q+G(q)
+
+ q
_q
M(q)
Äqd
_qd
qd
y
+
-
~q
_~q
Kp(~q)
Kd( _~q)
Compensation des non linéarités et découplage
Termes de correction non linéaire
¿+
+ +
Kp(~q) =
(Kpj~qj®1¡1 ; j~qj > ±1
Kp±®1¡11 ; j~qj · ±1
Kd( _~q) =
(Kdj _~qj®2¡1 ; j _~qj > ±2
Kd±®2¡12 ; j _~qj · ±2
Commande Dynamique à correction non linéaire
Introduction Mode glissant Références Commande C.N.B.M C.B.M

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 61
Robot FAMULUS KUKA
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 62
La commande par mode glissant est relativement simple à implémenter
(par rapport à d’autres approches de commande)
Elle fait partie des commandes dites à structure variable
Elle s’applique à la fois aux systèmes linéaires et aux systèmes non linéaires
Robuste par rapport aux perturbations externes
Robuste aussi par rapport aux incertitudes/variations des paramètres, etc
Différentes applications : Régulation, poursuite de trajectoires, poursuite de
modèle, observateurs, etc
La commande par mode glissant est une suite logique de la commande discontinue
(dans sa forme la plus facile : commande bang-bang)
Introduction
Début des années 60 besoin de robustesse en aéronautique
Découverte même avant l’utilisation du terme robustesse : Les
ingénieurs automaticiens cherchaient des lois de commande
insensibles aux variations dans la système à commander
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 63
Exemple Introductif
On considère le système mécanique suivant (masse-ressort-amortisseur) :
La dynamique de ce système s’écrit :
: La masse
: la position de la masse
: Coefficient de raideur du ressort
: Coefficient d’amortissement
: Force appliquée sur la masse
On souhaite faire converger vers avec la commande
Pour cela on considère la loi de commande suivante :
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 64
On remplace cette loi de commande dans la dynamique système, on obtient :
Si l’on considère :
La dynamique en boucle-fermée ci-dessus peut s’écrire :
Si on considère les états (position) et (vitesse)
Cette dynamique peut être mis sous forme d’équation d’état suivante :
C’est un système autonome dont le comportement dépend de la condition
initiale sur les états et des paramètres .
Exemple Introductif
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 65
Simulation du comportement en boucle-fermée du système résultant pour :
0 10 20 30 40 50 60-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
temps (sec)
Po
siti
on
et vite
sse
Position
Vitesse
Pour ce choix de paramètres
Exemple Introductif
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 66
Si on trace le plan de phase du système en boucle-fermée on obtient :
La commande proposée amène le système au point souhaité MAIS la
convergence est très lente !
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
x1
x2
Condition initiale
Point d’équilibre
Exemple Introductif
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 67
Idée de base
L’idée de base de la commande consiste en deux étapes :
o Amener le système sur un hyperplan de commutation stable (surface de
glissement)
o Converger sur la surface de glissement vers le point d’équilibre désiré
1
2
1
2
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 68
On considère le cas générale d’un système non linéaire dont la dynamique
s’écrit :
Avec deux fonctions non linéaires, avec
L’objectif de la commande est la stabilisation du système autour du point
d’équilibre :
Dans la suite l’approche de commande sera détaillée en se basant sur ce
modèle non linéaire
Néanmoins, elle reste valide pour les systèmes linéaires dont la dynamique
s’écrit :
Dynamique du système à commander
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 69
La dynamique de est stable pour :
Soit la variété :
La dynamique de est stable si
La variété est une surface appelée ’surface de commutation’ ou ’surface de
glissement’
Donc :
Dynamique de glissement
Sur la surface de glissement définie par est stable, donc
converge vers 0, le déplacement est gouverné par
La vitesse de convergence dépend de la valeur de
Mais sur cette surface donc converge aussi vers 0
L’évolution sur la surface de glissement est indépendante de et
Si au départ, le point initial n’est pas sur la surface de glissement, il faudra
amener le système sur cette surface
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 70
Dynamique de convergence vers la surface de glissement
Pour évaluer la stabilité, on considère la fonction de Lyapunov suivante :
Stabilité asymptotique si : est définie positive
est définie négative
On a :
Étant donné que :
donc est définie positive
Calculons maintenant sa première dérivée :
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 71
La lois de commande
est définie négative si :
est :
La commande équivalente :
Soit :
La commande équivalente est définie par :
est définie négative si :
Pour quel choix de ceci est vérifié ?
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 72
Cela est vérifié pour le choix suivant de :
La commande globale :
La commande proposée comporte deux termes : le premier correspond à une
commande continue et le deuxième correspond à une commande discontinue.
Commande équivalente (continue)
Commande discontinue
La commande discontinue :
La commande discontinue et le 2ème terme de l’expression de u, c.à.d :
Pour ce choix on a :
est définie négative car :
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 73
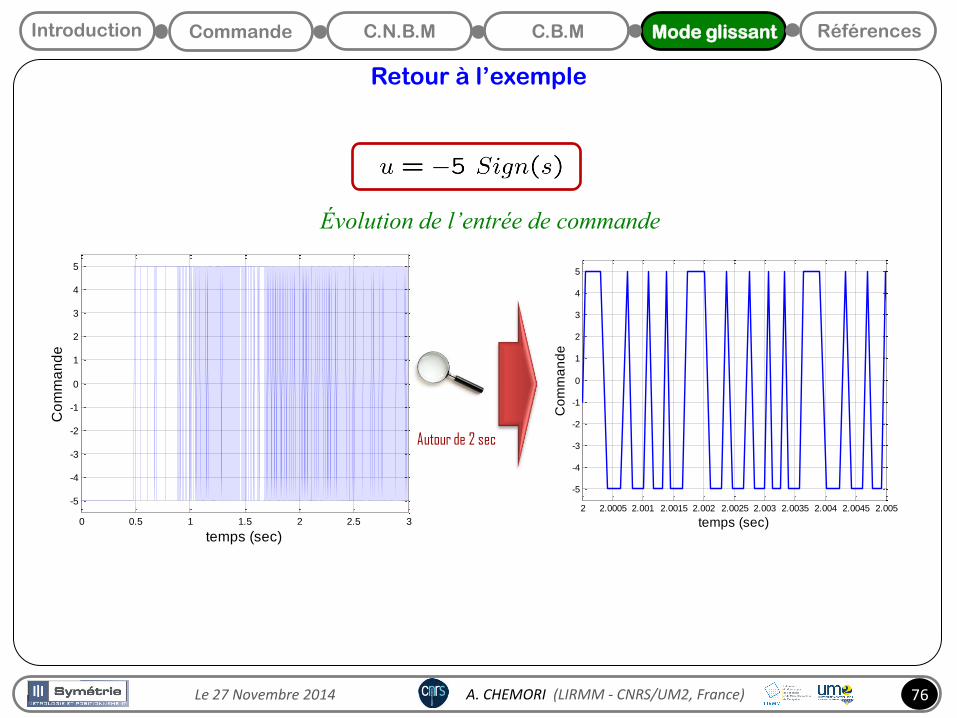
Retour à l’exemple
On souhaite faire converger vers avec la commande
On rappelle la dynamique du système :
La loi de commande par mode glissant s’écrira donc :
Avec :
et
Si on considère le choix suivant des paramètres de la commande :
donc :
Qui peut s’écrire sous la forme :
avec :
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 74
Si on considère, dans un premier lieu, la commande discontinue uniquement :
Évolution dans le plan de phase du système en B.F
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
x1
x 2
Condition initiale
Point d’équilibre
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
x1
x2
Condition initiale
Point d’équilibre
Commande par mode glissant (discontinue) Commande anticipative précédente (‘Feedforward’)
Retour à l’exemple
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 75
0 0.5 1 1.5 2 2.5 3-1.5
-1
-0.5
0
0.5
1
temps (sec)
Po
sitio
n e
t vite
sse
Position
Vitesse
Évolution des états du système en B.F
Commande par mode glissant (discontinue)
0 10 20 30 40 50 60-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
temps (sec)
Po
siti
on
et vite
sse
Position
Vitesse
Commande anticipative précédente (‘Feedforward’)
Retour à l’exemple
Introduction Références Commande C.N.B.M C.B.M Mode glissant
A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 76
0 0.5 1 1.5 2 2.5 3
-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (sec)
Co
mm
an
de
2 2.0005 2.001 2.0015 2.002 2.0025 2.003 2.0035 2.004 2.0045 2.005
-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (sec)
Co
mm
an
de
Évolution de l’entrée de commande
Autour de 2 sec
Retour à l’exemple
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 77
2 2.0005 2.001 2.0015 2.002 2.0025 2.003 2.0035 2.004 2.0045 2.005
-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (sec)
Co
mm
an
de
Phénomène de réticence (‘Chattering’ en anglais)
Si on fait un zoom sur la commande autour de on obtient :
Un mode glissant idéal n’existe pas étant donné qu’il nécessite une commande qui
commute avec une fréquence infinie
Dans un cas réel la commutation se fait pendant un temps de commutation + la
constante de temps des actionneurs La discontinuité dans le commande produit un
comportement dynamique particulier (cf. figure ci-dessus) autours de la surface de
glissement, appelé phénomène de réticence (‘Chattering’ en anglais)
Retour à l’exemple
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 78
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
x1
x2
0 0.5 1 1.5 2 2.5 3-5
0
5
10
temps (sec)
Co
mm
an
de
Même avec la commande globale il y a toujours le
phénomène de réticence
C’est un des problèmes de la commande par mode
glissant
Peut endommager les actionneurs !
Quelle solution peut on envisager ?
Application de la commande globale
Retour à l’exemple
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 79
Quelle solution pour le problème de réticence
Afin d’éviter le problème de réticence différentes solutions peuvent être envisagées :
-1
+1
-1
+1
-1
+1
Sigmoïde
Solution 3 : Envisager la commande par mode glissant d’ordre supérieur
Solution 2 : remplacer la fonction Sign
-1
+1
Solution 1 : remplacer la fonction Sign
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 80
Exemple précédent : Application de la solution utilisation de la fonction de saturation
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
x1
x2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
temps (sec)
Po
sitio
n e
t vite
sse
Position
Vitesse
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-4
-3
-2
-1
0
1
2
temps (sec)C
om
ma
nd
e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
x1
x2
0 0.5 1 1.5 2 2.5 3-5
0
5
10
temps (sec)
Co
mm
an
de
0 0.5 1 1.5 2 2.5 3-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
temps (sec)
Po
sitio
n e
t vite
sse
Position
Vitesse
Avec
fonc
tion
satu
ratio
n Av
ec fo
nctio
n si
gne
Pas de réticence !
Quelle solution pour le problème de réticence
Introduction Références Commande C.N.B.M C.B.M Mode glissant

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 81
Introduction Commande C.N.B.M C.B.M Mode glissant Références

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 82 82
Références bibliographiques

A. CHEMORI (LIRMM - CNRS/UM2, France) Le 27 Novembre 2014 83
www.lirmm.fr/~chemori/
Ahmed CHEMORI
Email: [email protected]
CNRS researcher
LIRMM – UMR CNRS/UM2 N° 5506
161, Rue Ada 34095, Montpellier
Tel : +33 (0)4.67.41.85.62
Fax : +33 (0)4.67.41.85.00
Coordonnées





























