Embed Size (px)
DESCRIPTION
Seminar of computational geometry. Lecture #1 Convexity. Example of coordinate-dependence. Point p. What is the “sum” of these two positions ?. Point q. If you assume coordinates, …. p = (x 1 , y 1 ). The sum is (x 1 +x 2 , y 1 +y 2 ) Is it correct ? Is it geometrically meaningful ?. - PowerPoint PPT Presentation
Citation preview

1
Seminar of computational geometry
Lecture #1 Convexity

2
Example of coordinate-dependence
What is the “sum” of these two positions ?
Point p
Point q

3
If you assume coordinates… ,
The sum is (x1+x2, y1+y2) Is it correct ? Is it geometrically meaningful ?
p = (x1, y1)
q = (x2, y2)

4
If you assume coordinates… ,
p = (x1, y1)
q = (x2, y2)
Origin
(x1+x2, y1+y2)
Vector sum (x1, y1) and (x2, y2) are considered as vectors from the
origin to p and q, respectively.

5
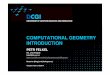
If you select a different origin… ,
p = (x1, y1)
q = (x2, y2)
Origin
(x1+x2, y1+y2)
If you choose a different coordinate frame, you will get a different result

6
Vector and Affine Spaces
Vector space Includes vectors and related operations No points
Affine space Superset of vector space Includes vectors, points, and related operations

7
Points and Vectors
A point is a position specified with coordinate values. A vector is specified as the difference between two points. If an origin is specified, then a point can be represented by a vector
from the origin. But, a point is still not a vector in coordinate-free concepts.
Point p
Point qvector (q - p)

8
Vector spaces
A vector space consists of Set of vectors, together with Two operations: addition of vectors and
multiplication of vectors by scalar numbers
A linear combination of vectors is also a vectorVV wvuwvu ,,

9
Affine Spaces
An affine space consists of Set of points, an associated vector space, and Two operations: the difference between two
points and the addition of a vector to a point

10
Addition
u
vu + v
p
p + w
u + v is a vector p + w is a point
w
u, v, w : vectorsp, q : points

11
Subtraction
v
u - vu
q
p
u - v is a vector p - q is a vector
p - q
p
p - w
p - w is a point
-w
u, v, w : vectorsp, q : points

12
Linear Combination
vvvvv
NN
N
iii cccc 1100
0
A linear space is spanned by a set of bases Any point in the space can be represented as
a linear combination of bases

13
Affine Combination
)()( 010
0
11000
ppp
pppp
N
iii
N
ii
NN
N
iii
cc
cccc

14
General position
"We assume that the points (lines, hyperplanes,. . . ) are in general position."
No "unlikely coincidences" happen in the considered configuration. No three randomly chosen points are collinear. Points in lR^d in general position, we assume similarly that no
unnecessary affine dependencies exist: No k<=d+1 points lie in a common (k-2)-flat.
For lines in the plane in general position, we postulate that no 3 lines have a common point and no 2 are parallel.

15
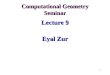
Convexity
A set S is convex if for any pair of points p,q S we have pq S.
p
q
non-convex
q
p
convex

16
Convex Hulls : Equivalent definitions
The intersection of all covex sets that contains P The intersection of all halfspaces that contains P. The union of all triangles determined by points in P. All convex combinations of points in P.
P here is a set of input points

17
Convex hulls
p0
p1p2
p4
p5
p6
p7
p8
p9
p11
p12
Extreme pointInt angle < pi
Extreme edgeSupports the point set

18
Caratheodory's theorem
Let X . Then each point of ( ) is a convex combination
of at most 1 points of .
d conv X
d X
)0 ,1( (1, 1)
(1, 0))0 ,0(
(¼ ,¼)

19
Separation theorem
Let C, D⊆ℝd be convex sets with C∩D=∅. Then there exist a hyperplane h such that C lies in one of the closed half-spaces determined by h, and D lies in the opposite closed half-space.In other words, there exists a unit vector a∈ℝd and a number b∈ℝ such that for all x∈C we have <a, x>≥b, and for all x∈D we have <a, x>≤b.
If C and D are closed and at least one of them is bounded, they can be separated strictly; in such a way that C∩h=D∩h=∅.

20
Example for separation
C
C
h
q
p

21
Sketch of proof
We will assume that C and D are compact (i.e., closed and bounded). The cartesian product C x D∈ℝ2d is a compact set too.
Let us consider the function f : (x, y)→||x-y|| , when (x, y) ∈ C x D. f attains its minimum, so there exist two points a∈C and b∈D such that ||a-b|| is the possible minimum.
The hyperplane h perpendicular to the segment ab and passing through its midpoint will be the one that we are searching for.
From elementary geometric reasoning, it is easily seen that h indeed separates the sets C and D.

22
Farkas lemma
For every d x n real matrix A, exactly one of the following cases occurs: There exists an x∈ℝn such that Ax=0 and x>0 There exists a y∈ℝd such that yT A<0. Thus, if we multiply
j-th equation in the system Ax=0 by yi and add these equations together, we obtain an equation that obviously has no nontrivial nonnegative solution, since all the coefficients on the left-hand sides are strictly negative, while the right-hand side is 0.

23
Proof of Farkas lemma
Another version of the separation theorem. V⊂ℝd be the set of n points given bye the column
vectors of the matrix A. Two cases:
0∈conv(V)0 is a convex combination of the points of V.The coefficients of this convex combination determine a nontrivial nonnegative solution to Ax=0
0∉conv(V)Exist hyperplane strictly separation V from 0, i.e., a unit vector y∈ℝn such that <y, v> < <y, 0> = 0 for each v∈V.

24
Radon’s lemma
Let A be a set of d+2 points in ℝd. Then there exist two disjoint subsets A1, A2⊂A such that conv(A1) ∩ conv(A2)≠∅
A point x ∈ conv(A1) ∩ conv(A2) is called a Radon point of A.
(A1, A2) is called Radon partition of A.

25
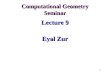
Helly’s theorem
Let C1, C2, …, Cn be convex sets in ℝd, n≥d+1. Suppose that the intersection of every d+1 of these sets is nonempty. Then the intersection of all the Ci is nonempty.

26
Proof of Helly’s theorem Using Radon’s lemma. For a fixed d, we proceed by induction on n. The case n=d+1 is clear. So we suppose that n ≥d+2 and the statement of Helly’s theorem holds for smaller n. n=d+2 is crucial case; the result for larger n follows by a simple reduction. Suppose C1, C2, …, Cn satisfying the assumption. If we leave out any one of these sets, the remaining sets have a nonempty
intersection by the inductive assumption. Fix a point ai ∈ ⋂i≠jCj and consider the points a1,a2, …, ad+2
By Radon’s lemma, there exist disjoint index sets I1, I2 ⊂{1, 2, …, d+2} such that
1 2({ : }) ({ : })i iconv a i I conv a i I

27
Example to Helly’s theorem
a2
a1
a4a3
C2
C1
C3 C4

28
Continue proof of Helly’s theorem
Consider i∈{1, 2, …, n}, then i∉I1 or i∉I2 If i∉I1 then each aj with j ∈ I1 lies in Ci
and so x∈conv({aj : j ∈ I1})⊆Ci
If i∉I2 then each aj with j ∈ I2 lies in Ci
and so x∈conv({aj : j ∈ I2})⊆Ci
Therefore x ∈ ∩i=1nCi

29
Infinite version of Helly’s theorem
Let C be an arbitrary infinite family of compact convex sets in ℝd such that any d+1 of the sets have a nonempty intersection. Then all the sets of C have a nonempty intersection.
Proof
Any finite subfamily of C has a nonempty intersection. By a basic property of compactness, if we have an arbitrary family of compact sets such that each of it’s finite subfamilies has a nonempty intersection, then the entire family has a nonempty intersection.

30
Centerpoint
Definition 1: Let X be an n-point set in ℝd. A point x ∈ ℝd is called a centerpoint of X if each closed half-space containing x contains at least n/(d+1) points of X.
Definition 2: x is a centerpoint of X if and only if it lies in each open half space η such that |X⋂η|>dn/(d+1).

31
Centerpoint theorem
Each finite point set in ℝd has at least one centerpoint. Proof
Use Helly’s theorem to conclude that all these open half-spaces intersect.
But we have infinitely many half-spaces η which are unbound and open.
Consider the compact convex set conv(X⋂η)⊂η
ηconv(X⋂η)

32
Centerpoint theorem(2)
Run η through all open-spaces with |X⋂η|>dn/(d+1) We obtain a family C of compact convex sets. Each Ci contains more than dn/(d+1) points of
X. Intersection of any d+1 Ci contains at least one
point of X. The family C consists of finitely many distinct
sets.(since X has finitely many distinct subsets).
By Helly’s theorem C⋂ ≠∅, then each point in this intersection is a centerpoint.

33
Ham-sandwich theorem
Every d finite sets in ℝd can be simultaneously bisected by a hyperplane. A hyperplane h bisects a finite set A if each of the open half-spaces defined by h contains at most |⌊A|/2 points of A.⌋

34
Center transversal theorem
Let 1≤k≤d and let A1, A2, …, Ak be finite point sets in ℝd. Then there exists a (k-1)-flat f such that for every hyperplane h containing f, both the closed half-spaces defined by h contain at least |Ai|/(d-k+2) points
of Ai i=1, 2, …, k. For k=d it’s ham-sandwich theorem. For k=1 it’s the centerpoint theorem.