Embed Size (px)
Citation preview
Ahmed CHEMORI Laboratory of Informatics, Robotics and Microelectronics of Montpellier
LIRMM, CNRS/University of Montpellier 2161, rue Ada 34095 Montpellier, France
SEMINAR
School of Naval Architecture & Ocean Engineering
17th of November 2016
1

Speaker : Ahmed CHEMORI
Montpellier city in France
Montpellier
• Montpellier is a city in the south of France • The capital of Languedoc Roussillon’s region as well as Hérault’s department • The 8th city in the country
LIR
MM
2

Speaker : Ahmed CHEMORI
Laboratory of Informatics, Robotics and Microelectronics of Montpellier (LIRMM) is aresearch laboratory supervised by both University of Montpellier and the French NationalCenter for Scientific Research (CNRS)
204 permanents and 155 PhD students, working together in 3 research units :
Department of
Computer scienceDepartment of
RoboticsDepartment of
Microelectronics
LIRMM Laboratory at Montpellier - France
LIR
MM
3

Speaker : Ahmed CHEMORI
Robotics Department
DEXTER
IDH
ICARDEMAR
EXPLORE
ROB / INFO
5 Research Teams :
Image and interaction for manipulation of visual data Human sensory motor system (modelling, control, neuroprosthesis)
Robotics department at LIRMM
LIR
MM
4

Speaker : Ahmed CHEMORI
E. DOMBRE(DR CNRS Emeritus)
P. POIGNET(PR UM2)
N. ZEMITI(MCF UM2)
C. LIU(CR CNRS)
F. PIERROT(DR CNRS)
O. COMPANY(MCF UM2)
S. KRUT(CR CNRS)
A. CHEMORI(CR CNRS)
M. GOUTTEFARDE(CR CNRS)
Medical robotics (Design & control)
Parallel robotics (design & control)
S. ABDELAZIZ(MCF UM2)
DEXTER Research team Within the Robotics department
LIR
MM
Y. HEDABE(PR UM2)
+ Master & PhD students5

Speaker : Ahmed CHEMORI
Facilities at the Robotics Department
LIR
MM
6

Speaker : Ahmed CHEMORI
My research activities
LIR
MM
Control of Robotic Systems
Underwater Vehicles
Humanoids/ Exoskeletons
Parallel Kinematic
Manipulators
Underactuated Mechanical
Systems
http://www.lirmm.fr/~chemori 7

Speaker : Ahmed CHEMORI
Outline of the presentation
o Introduction o Bioinspired roboticso Context of the project of U-CAT o U-CAT turtle-like AUVo Some control solutions o Real-time experimentso Conclusion
8

Speaker : Ahmed CHEMORI
Introduction
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
9

Speaker : Ahmed CHEMORI
Some applications of underwater robots
Many applications (within the offshore, onshore, and inshore environments) such as :Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
10

Speaker : Ahmed CHEMORI
Main related research topics
Research Topics
Sensing
SLAM
Software
Communication
Swarm/Flotilla
Control
DSA for cooperation
SLAM(Simultaneous
Localization And Mapping)
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
11

Speaker : Ahmed CHEMORI
Classification of main marine vehicles
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Marine Vehicles
ROVs
Crawlers
AUVs
Gliders
Bio-inspired
ASVs
ROV : Remotely Operated Vehicle
LBC, Seabotix
Slocum Glider, Teledyne
SeaLion 2, JW Fishers
ASV : AutonomousSurface Vehicle
REMUS 6000, WHOI
12

Speaker : Ahmed CHEMORI
Bioinspired Robotics
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
13

Speaker : Ahmed CHEMORI
Bioinspired robotics
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
14

Speaker : Ahmed CHEMORI
Some examples of bioinspired robots
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
15

Speaker : Ahmed CHEMORI
Some examples of biomimetic underwater robots
Robotuna, MIT
AQUA, MCGill
RHex, Boston Dynamics
Galatea, TUdelft
Madeleine, Stanford University
Fish Robot, University of Beijin RoboFish, SHOAL
U-CAT, TUT
Sepios, ETH
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
16

Speaker : Ahmed CHEMORI
Some examples of biomimetic underwater robots
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
17

Speaker : Ahmed CHEMORI
Context of the project
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
18

Speaker : Ahmed CHEMORI
Origin of U-CAT biomimetic AUV
Daily practices of an archeologistIntroduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
19

Speaker : Ahmed CHEMORI
Two projects for archeology service
Underwater archeology
Archeology inspection Archeology manipulation
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
20

Speaker : Ahmed CHEMORI
Underwater archeology manipulation
Designing the robotic toolset for deep sea archaeology,from the surface to 2000 meters deep
Scientific coordinator : V. CREUZE
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
21

Speaker : Ahmed CHEMORI
U-CAT Turtle-like AUV
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
22

Speaker : Ahmed CHEMORI
ARROWS Project
For archeological applications (shipwreck inspection)
Origin of U-CAT biomimetic AUV
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
23

Speaker : Ahmed CHEMORI
Some features of U-CAT
Designed for : Archeology inspectionVideo : identify objects of interestSmall and highly maneuverableNo propellers : Restrict visibility near bottomSilent motion : Not disturb bottom sedimentsUntethered : Cable constrains vehicle motionsActuators: 4 finsActuated dof: Fully
Some technical features
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
24

Speaker : Ahmed CHEMORI
Main generalized coordinates
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
25

Speaker : Ahmed CHEMORI
Fin’s actuation of U-CAT
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Surge SwayHeave
PitchRollYaw
26

Speaker : Ahmed CHEMORI
Why Fin’s actuation?
Propellers Fins
F5 Robotics
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Thruster based propulsion Video
27

Speaker : Ahmed CHEMORI
Preliminary design : Mini U-CAT
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Video
28

Speaker : Ahmed CHEMORI
Two control modes : Hover & Cruise
Hover Control Cruise ControlIntroduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
29

Speaker : Ahmed CHEMORI
Surge control in Cruise mode Sway control in Cruise mode Heave control in Cruise Control
Pitch control in Cruise modeRoll control in Cruise mode Yaw control in Cruise mode
Fins configuration in Hover mode
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
30

Speaker : Ahmed CHEMORI
Fins configuration in Cruise mode
Surge control in Cruise mode Sway control in Cruise mode Heave control in Cruise Control
Pitch control in Cruise mode Roll control in Cruise mode Yaw control in Cruise mode
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
31

Speaker : Ahmed CHEMORI
Some control solutions
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
32

Speaker : Ahmed CHEMORI
Overview of the proposed control solutions
PID control
Nonlinear RISE control
Inverse dynamics
Adaptive inverse dynamics
Nonlinear PID
… etc
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
33
Speaker : Ahmed CHEMORI
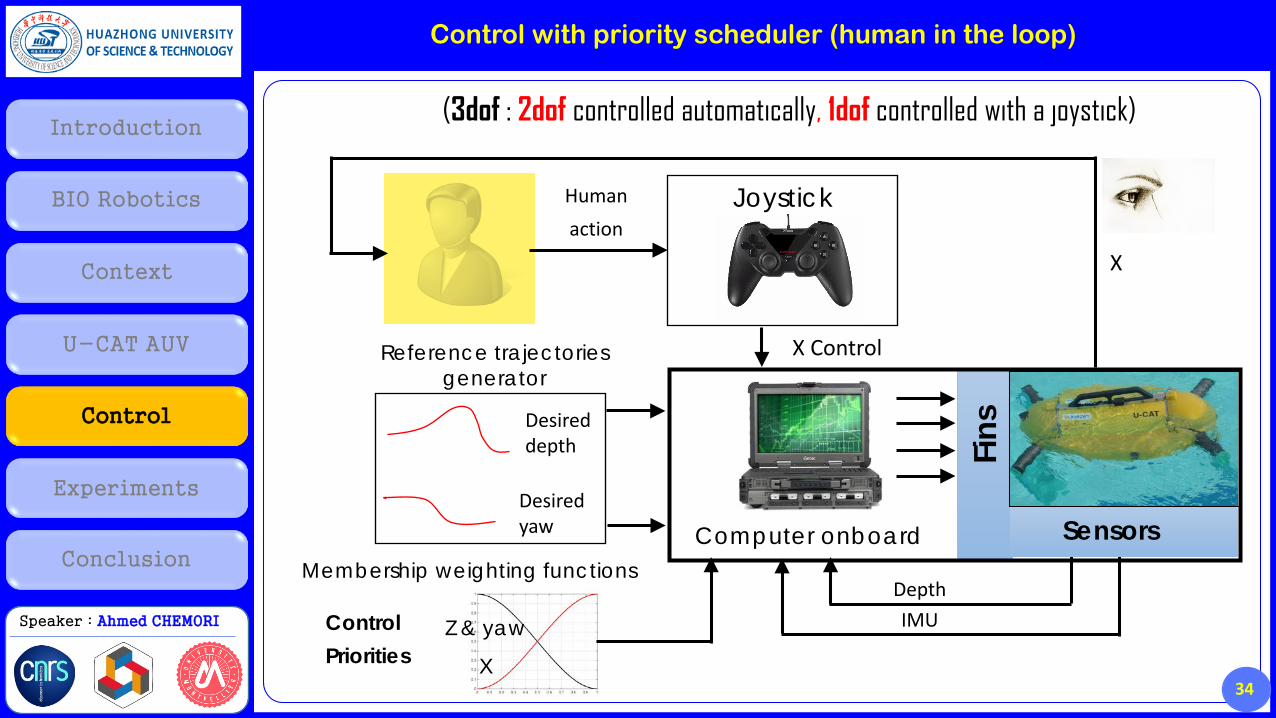
Control with priority scheduler (human in the loop)
Desired depth
Human action
Reference trajectories generator
DepthIMU
Joystick
Desired yaw
X
Membership weighting functions
Control Priorities
Z & yaw
X
Computer onboard
X Control
Fins
Sensors
(3dof : 2dof controlled automatically, 1dof controlled with a joystick)Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
34

Speaker : Ahmed CHEMORI
Desired depth
Human action
Reference trajectories generator
X Control
DepthIMU
Joystick
X, Yaw
Yaw Control
Membership weighting functions
Control Priorities
Depth
X & yaw
Computer onboard
Fins
Sensors
Control with priority scheduler (human in the loop)
(3dof : 1dof controlled automatically, 2dof controlled with a joystick)Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
35

Speaker : Ahmed CHEMORI
Controller implementation with priority scheduler
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
36

Speaker : Ahmed CHEMORI
Real-time experiments
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
37

Speaker : Ahmed CHEMORI
First experiments (open-loop control)
During WMSM 2015 at Canary islands – Feb 2015
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Video
38

Speaker : Ahmed CHEMORI
First experiments of closed-loop control
In a swimming pool at Tallinn, Estonia – June 2015
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
39

Speaker : Ahmed CHEMORI
External disturbance rejection in depth control
In Rummu Lake near Tallinn, Estonia, June 2015
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
40

Speaker : Ahmed CHEMORI
Depth control in presence of disturbances
At SCC, Sareema, Estonia – November 2015
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
41

Speaker : Ahmed CHEMORI
Experiments for Archeology applications
In Rummu Lake near Tallinn, Estonia
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Video
42

Speaker : Ahmed CHEMORI
Pinger-based control : Diver following
In Rummu lake near Tallinn, Estonia – August 2016
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
Video
43

Speaker : Ahmed CHEMORI
Report on Euronews TV
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
44

Speaker : Ahmed CHEMORI
Report on Estonian TV
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
45

Speaker : Ahmed CHEMORI
Conclusion
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
46

Speaker : Ahmed CHEMORI
Conclusion
Addressed problem : Control of biomimetic underwater robotic vehicles
General context : Underwater archeology Inspection & Manipulation
Challenges : Nonlinear dynamics, unknown /variable parameters,
uncertainties, external disturbances, unmeasurable states, …etc
Proposed solutions : Different advanced control techniques
Validation : Real-time experiments in the lab / in the sea (real conditions)
Introduction
BIO Robotics
Context
U-CAT AUV
Control
Experiments
Conclusion
47

48Mexico, December 2013 …
www.lirmm.fr/~chemori/
See experiments videos on:
Papers are available on :
Find more videos on Ahmed CHEMORI’s YouTube channel:
Robot Control
48

















