Embed Size (px)
Citation preview
SEMINAR TUGAS AKHIR
RANCANG BANGUN KONTROL pH MENGGUNAKAN PID BERBASIS
TUNING DAMPING RATIO(ξ)
OLEH :HARIS SANJAYA 2407100085
DOSEN PEMBIMBING :HENDRA CORDOVA ST,MT.
NIP. 196905301994121001
LABORATORIUM REKAYASA INSTRUMENTASI DAN KONTROLJURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRIINSTITUT TEKNOLOGI SEPULUH NOPEMBER
AGENDAPENDAHULUAN
DASAR TEORI
RANCANG BANGUN PROSES PENGENDALIAN pH
HASIL
KESIMPULAN & SARAN
PENDAHULUAN
KarakteristikNonlinear
pH
Titrasi Asam-Basa
PenelitianMengenai
Direct Synthesis
PENDAHULUAN
Bagaimana merancang plant yang digunakanpada proses tersebut ?
Bagaimana menerapkan direct synthesis PID pada proses pengendalian pH secara aktual ?
PENDAHULUAN
CH3COOH 0.1M & NaOH 0.1M
Tangki pengadukkapasitas 11 L
Pengendalianketinggian manual
Tidakmenitikberatkanlaju reaksiLaju aliran asamtidak boleh melebihilaju aliran basa
PENDAHULUAN
1. Membangun mini plant pengendalian pH.2. Menerapkan konsep direct synthesis sebagai pengendali pH
secara real time.
DASAR TEORI
1.Syahrizal Ismail(2011)2. Fadloli Luthfi (2010)
Auto Switch PID pada CIPM3. Hendra Cordova (2004)
Auto Switch PID pada CSTR
TitratingStreamFb, Cb
ProcessStreamFa, Ca
EffluentStream
Fa+Fb, Xa, Xb
DASAR TEORI
DASAR TEORI
e uPID 2
PID 1
PID 3
SETPOINT RANGE 1
+-
SETPOINTSETPOINT RANGE 2
SETPOINT RANGE 3
Waktu(s)
pH

RANCANG BANGUN PROSES PENGENDALIAN pH
RANCANG BANGUN PROSES PENGENDALIAN pH
No Parameter Satuan
1 Volume main tank 11 L
2 Volume acid tank 13,8 L
3 Volume base tank 13,8 L
4 Laju aliran asam 0,11 L/min
5 Laju aliran basa 0-0,2 L/min
6 Konsentrasi asam 0,1M
7 Konsentrasi basa 0,1M
Tabel Parameter Proses
RANCANG BANGUN PROSES PENGENDALIAN pH
RANCANG BANGUN PROSES PENGENDALIAN pH Mulai
Penentuan Kp, Ki, Kd menggunakanindeks peformansi
ITAE
Menentukanfrekuensi natural
karakteristik sistem
Identifikasi pemodelan sistem
plant
Stabil
Selesai
YA
TIDAK
Pemodelan plant
Pemodelan matematis untuk daerah 1
Pemodelan matematis untuk daerah 2
Dari hasil percobaan didapatkan ts=26, damping ratio ξ=0,1, dan Ѡn=1,92
Dari hasil percobaan didapatkan ts=714, damping ratio ξ=0,1, dan Ѡn=0,07
Pemodelan matematis untuk daerah 3
Dari hasil percobaan didapatkan ts=409, damping ratio ξ=0,1, dan Ѡn=0,12
Perhitungan parameter Kp, Ki dengan metode direct synthesisUntuk daerah 1
Gc(s) G(s)
Gc(s) Gp(s)R(s) C(s)
Dengan memasukan setiap fungsi transfer diatas maka, T1(s) adalah:T1(s)=
Koefesien pengendali PID dapat ditentukan dari denumerator fungsi transfer diatas dengan mensubsitusikannya ke dalam koefesien indeks performansi ITAE untuk input step yaitu: S2 + 1,4Ѡn S + ѠnDengan Ѡn bervariasi tergantung dari penalaan damping ratio maka nilai Kp dan Ki adalah:939,39 Ki = Ѡn ; Ѡn= 0,07Ki = 7,45×10-5
939,39 Kp+1 = 1,4 ѠnKp = -9,6×10-4
Untuk daerah 2 dan 3 dilakukan hal yang sama,didapatkan nilai parameter masing masing daerah adalahDaerah 2:Kp= 1,5×10-3
Ki= 1,71×10-3
Daerah 3: Kp= -1,48×10-3 Ki= 2,1×10-4
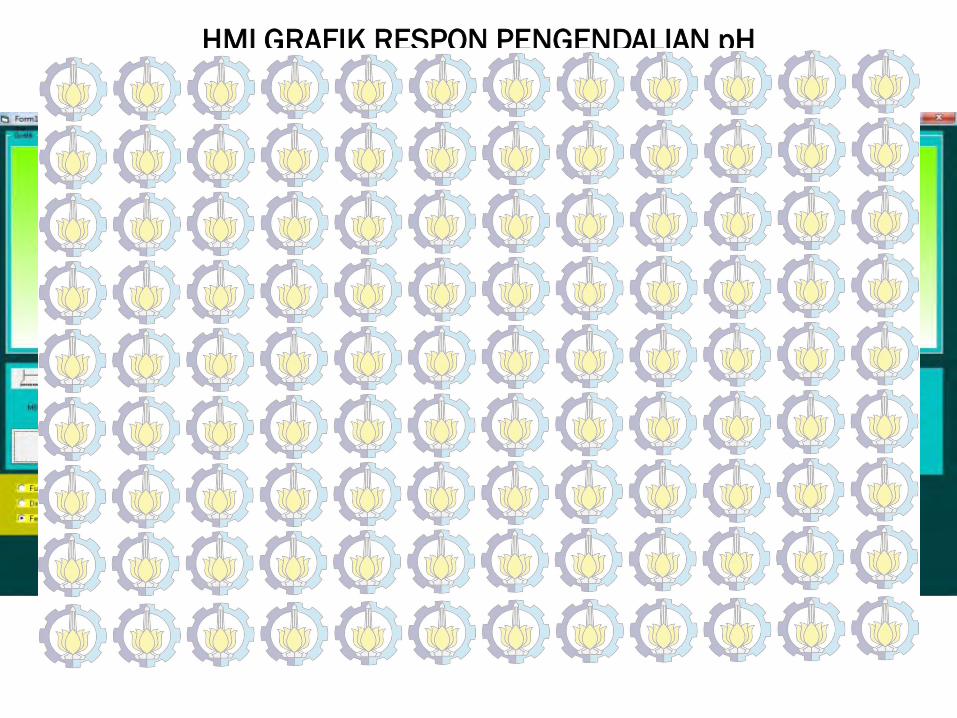
HMI GRAFIK RESPON PENGENDALIAN pH
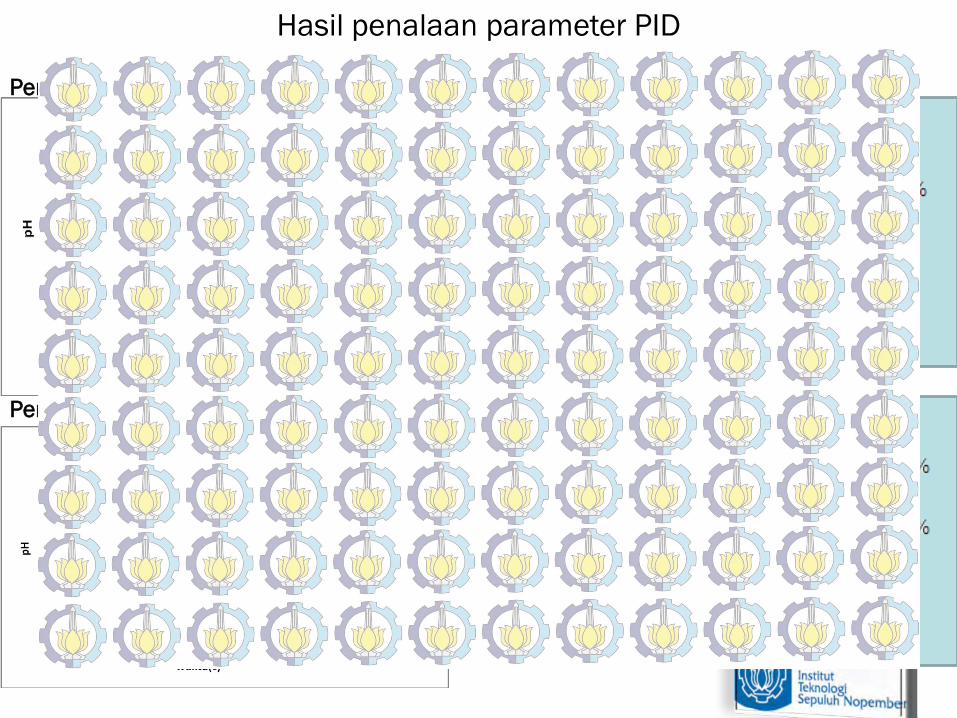
Hasil penalaan parameter PID
Penalaan Daerah 1 (2,4≤ pH<5,5)Max overshoot
Error steady state
Time settling 514 detik
Penalaan Daerah 2 (5,5≤pH<9,2)
Max overshoot
Error steady state
Time settling 255 detik
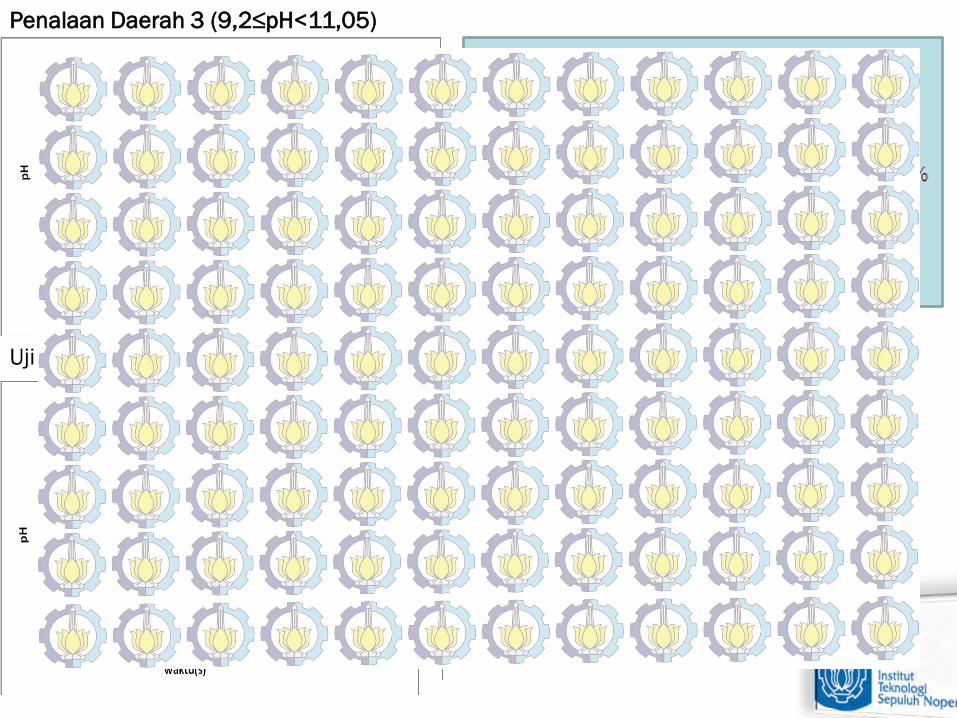
Penalaan Daerah 3 (9,2≤pH<11,05)
Max overshoot
Error steady state
Time settling 162 detik
Uji Tracking Setpoint
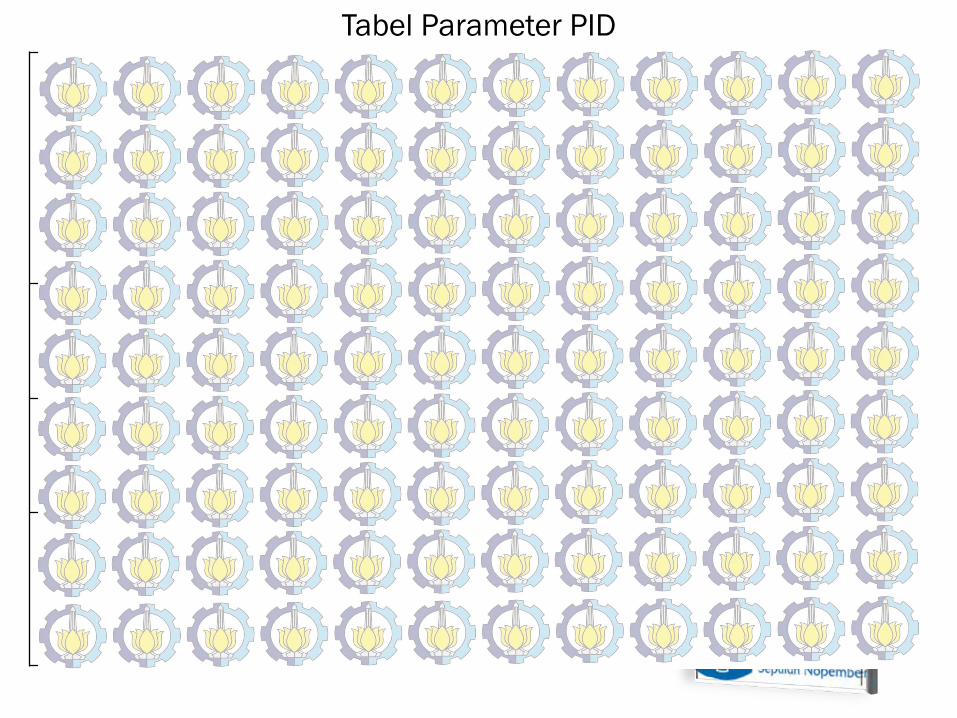
Tabel Parameter PID
No Daerah Setpoint
Damping Ratio
ξ
Parameter PIDKp Ki Kd
1 2,4-5,5
1,5×10-5 0,7 0,5 0
2 5,5-9,2
2,5×10-4 0,97 0,7 0
3 9,2-11,05
2,18×10-
51,39 1 0
KESIMPULANKesimpulan yang dapat diambil dalam tugas akhir ini antara lain adalah:1. Metode tuning direct synthesis PID telah berhasil diterapkan dan diintegrasikan dengan
perangkat lunak visual basic2. Metode mendapatkan parameter PID menggunakan direct synthesis dengan indeks
performansi ITAE.3. Didapatkan nilai performansi terbaik untuk daerah 1 adalah dengan nilai tala ξ=1,5×10-5,
dengan nilai Kp=0,7 dan nilai Ki= 0,5 pada setpoint pH 4, memiliki nilai maximum overshoot=17%, error steady=1,5%, time settling=514 detik. Sedangkan untuk daerah 2 nilai performansi terbaik dengan nilai tala ξ=6×10-4, dengan nilai Kp=0,4 dan nilai Ki=0,3 pada setpoint pH 6, memiliki nilai maximum overshoot =3,16%, error steady state= 2,83%, time settling =255 detik. Untuk daerah 3 nilai performansi terbaik dengan nilai tala ξ=2,18×10-5, dengan nilai Kp=1,97 Ki=1 pada setpoint pH =11, memiliki nilai maximum overshot= 1,9%, error steady state =0,36%, time settling= 162 detik.
4. Nilai performansi terbaik secara terjadi pada penalaan daerah tiga, dengan nilai tala ξ=2,18×10-5, dengan nilai Kp=1,97 Ki=1
SARAN%Larutan titrasi dapat divariasikan menjadi asam kuat dititrasi dengan basa lemah.Dibuatkan sistem pengendalian ketinggian untuk masing-masing tangki, sehingga mini plant semakin kokohDibuatkan pemodelan matematis yang ideal untuk plant pengendalian pHMenambahkan pengendalian untuk flow pada larutan asam.