Embed Size (px)
Citation preview
Sensori per la Robotica
Basilio BonaDipartimento di Automatica e Informatica
Politecnico di Torino
Internal Report: DAUIN/BB/2006/07.02
Versione: 7 settembre 2006
”Sensori robotica”.tex

Capitolo 1
Introduzione
In questa dispensa verranno esposti i principi di funzionamento e le caratteristiche deisensori e trasduttori piu comunemente utilizzati nella robotica industriale, mobile e diservizio.
Ricordiamo che il terminetrasduttore indica, in generale, un dispositivo diverso daquello indicato dal terminesensore; in particolare:
Trasduttore: (in inglesetransducer) e un dispositivo o apparato, di solito elettrico oelettronico, ma talvolta anche semplicemente meccanico, che converte una gran-dezza fisica in un’altra; ad esempio, abbiamo trasduttori pressione-tensione, forza-spostamento, corrente-tensione, velocita-tensione, temperatura-lunghezza ecc.
I trasduttori possono generalmente fungere sia da sensori sia da attuatori.
Sensore: (in inglesesensor) e un dispositivo o apparato che permette la misura di unagrandezza fisica, attraverso l’uso di un trasduttore. La grandezza fisica viene tra-sformata in un segnale, generalmente elettrico, di tipo continuo o discreto, da cuisi estrae il valore numerico della grandezza misurata. Il sensore puo esseredi-retto, quando il valore della grandezzae immediatamente rilevabile dal segnale(ad esempio, la temperatura in un termometro a mercurio) oppureindiretto, quan-do e necessario dotarlo di un indicatore che fornisca in modo esplicito il livelloanalogico o il valore numerico della grandezza.
Spesso si usano questi due termini in modo indifferenziato, in quanto il sensore puoessere pensato come il dispositivo che esegue la trasduzione di una grandezza fisica inun valore analogico o numerico.
2
1.1 Caratteristiche e Prestazioni dei Sensori
Ricordiamo anche i parametri che definiscono le prestazioni dei sensori e che consentonodi paragonare tra loro sensori differenti: essi sono larisoluzione, la ripetibilit a e laprecisioneo accuratezza.
Risoluzione La risoluzione (in ingleseresolution) definisce e misura il piu piccoloscarto della grandezza misurata che un sensoree in grado di rilevare.
Ad esempio, un encoder dotato di 3600 tacche sulla sua periferia potra risolvere undecimo di grado e non meno1.
La risoluzionee un parametro importante perche condiziona sia la ripetibilita sia l’accu-ratezza. La risoluzione viene di solito indicata dal costruttore nelle specifiche tecnichedel sensore.
Ripetibilit a La ripetibilita (in ingleserepeatabilityo ancheprecision) definisce e quan-tifica la capacita di un sensore di misurare la stessa grandezza con misurazioni2 effettuatein tempi successivi.
Piu esattamente essae definita come una quantificazione convenzionale della variabilitadei risultati della misurazione quando la stessa quantita fisicae misurata molte voltedallo stesso operatore in tempi successivi.
La ripetibilita diminuisce quando la variabilita dei risultati diminuisce e quindi occorreprestare attenzione al significato esatto del termine, perche spesso si dice, erroneamen-te, che la ripetibilita aumenta (il sistemae piu ripetibile, ossiae migliore) quando siottengono variazioni minori (vedi ancora la nota1).
Essae quindi un parametro che dipende sia dalla risoluzione dei sensori, sia dalla proce-dura di misurazione che potrebbe introdurre, anche inconsapevolmente, degli effetti cheproducono una variabilita temporale dei risultati.
Di solito il parametro numerico che quantifica la ripetibilita viene definito in modo sta-tistico, ad esempio calcolando la deviazione standard di un certo numero di misurazioni,secondo un protocollo di misura ben definito.
Tuttavia questo protocollo potrebbe essere diverso da costruttore a costruttore;e perciomolto importante stabilire e rendere palesi le procedure con cui si misura la ripetibilita.
Spesso si incontra anche il termineriproducibilita; la differenza tra ripetibilita e ripro-ducibilita puo essere definita come segue
1 Verrebbe da dire “... e non piu.”, perche nel linguaggio comune una “grande” risoluzione implica unapiccola variabilita dei risultati. Occorre stare attenti ai trabocchetti semantici della lingua.
2Conmisurazionesi intende la procedura con cui si procede a misurare una certa grandezza, conmisurasi intende il risultato numerico della misurazione.
3
ripetibilit a la dispersione di valori ottenuta usando lo stesso sensore, dallo stesso ope-ratore, nelle stesse condizioni e in un tempo ragionevolmente breve.
riproducibilit a a dispersione ottenuta compiendo le stesse misurazioni con sensori eoperatori differenti e/o su un tempo relativamente lungo.
Precisione e Accuratezza I termini precisioneeaccuratezzasono legati agli errori ca-suali e sistematici. Una misurae tanto piu precisa quanto piu i singoli valori misurati incondizioni di ripetitibilita si concentrano intorno alla media della serie di misure effet-tuate. Il concetto di precisionee qualitativo. La variabilita dei risultati viene quantificata,come di consueto, nella deviazione standardσ. Ma questa di per se none atta a quantifi-care la precisione della misura secondo il significato usuale del termine di “qualita dellamisura”. Ad esempio una deviazione standard di 1 mm rappresenta ottima o pessimaprecisione a seconda che si stiano misurando lunghezze della decina di metri o inferiorial centimetro. Si preferisce quantificare la precisione con il modulo del coefficiente divariazionev = σ |x|, in genere espresso in percentuale. Una deviazione standard di 1mm su una misura di 10 cm corrisponde a un coefficiente di variazione dell’1%. Si pre-sti ancora una volta attenzione al fatto che nell’uso corrente “maggiore”e la precisione,“minore” e il numero che la indica.
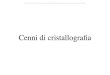
L’accuratezza esprime invece l’assenza di errori sistematici nella misura: una misuraetanto piu accurata quanto piu la media delle misure si avvicina al valore vero della gran-dezza. Anche l’accuratezzae spesso espressa come rapporto fra l’errore sistematico e ilvalore della grandezza. La Figura1.1 indica la distribuzione di valori ottenuti da misuredi diversa precisione e accuratezza, in una situazione in cui si presume di conoscere ilvalore “vero” della grandezza, rappresentato dal centro del cerchio; l’area del cerchiorappresenta lo scarto che l’utente ritiene accettabile.
Nel caso a) la media delle misure approssima bene il valore vero e la dispersione none grande: percio si dice chee accurato e preciso. Anche il caso d)e preciso, perchele misure non sono disperse, ma non accurato, perche le misure hanno un valor mediolontano dal valore vero: il caso b), al contrario,e accurato, ma non preciso; il caso c)infine none ne accurato ne preciso.
Occorre pero considerare che spesso il valore vero di una grandezza none ne conosciuto,ne conoscibile, per cui lo si sostituisce con la miglio stima disponibile.
Nella teoria degli errori, l’accuratezzae il grado di corrispondenza del dato teorico,desumibile da una serie di valori misurati, con il dato reale o di riferimento.
Uno strumento deteriorato o alterato, usato per acquisire una serie di valori potrebbeapparire preciso, in quanto i valori ottenuti sono vicini tra loro, ma essere scarsamenteaccurato se questo valore differisce dal valore che realmente si dovrebbe ottenere. Sipensi per esempio ad un metro impiegato ad una temperatura ambientale elevata e quindi
4

Figura 1.1:Ripetibilita, precisione e accuratezza.
soggetto ad allungarsi a causa della dilatazione termica; i risultati potrebbero essereprecisi e ripetibili, ma tutti affetti da un errore sistematico.
L’errore costante e ripetibile che si ottiene in questo modoe dettoerrore sistematico.
Altre caratteristiche importanti per scegliere o paragonare i sensori sono le seguenti.
Funzione di trasferimentoLa funzione di trasferimento (fdt) descrive quantitativamente la relazione tra ilsegnale fisico in ingressou e il segnale elettricoy in uscita dal sensore, che rap-presenta la misura, ossia misura la funzioney(u). Se la funzionee lineare la fdtedata come rapporto tra trasformate di Laplace dei rispettivi segnali
fdt: G(s) =Y (s)U(s)
SensitivitaE il rapporto tra il segnale fisico in ingresso e il segnale elettrico in uscita, di solitoespresso come un rapporto tra incrementi finiti
s =∆y
∆u
5
oppure come derivata della funzioney(u):
s0 =dy
du
∣∣∣∣u=u0
calcolata in un punto particolare.
Coefficiente di temperaturaLa sensistivita puo essere dipendente dalla temperatura di funzionamento. Il coef-ficiente di temperatura misura questa dipendenza.
Ampiezza dinamicaL’ampiezza dinamica – o semplicementedinamica– (in inglesedynamic range)definisce l’ampiezza dell’intervallo di valori del segnale di ingresso che puo venireconvertito linearmente in segnale elettrico dal sensore. Segnali all’esterno di que-sto intervallo possono essere convertiti in segnale elettrico solo con forti linearitao bassa accuratezza/precisione.
La dinamica viene citata spesso nei sistemi di riproduzione di segnali audio evideo, ma comunque rappresenta un parametro caratteristico anche per sensori otrasduttori di tipo diverso.
L’ampiezza dell’intervallo considerato nella misura della dinamica (lineare) va dalvalore minimo, definito come quello appena superiore al rumore di fondo, e quellomassimo, immediatamente prima che si verifichino fenomeni di non linearita odistorsione del segnale.
L’ampiezza dell’intervallo viene misurata come rapporto tra il valore massimoe il valore minimo del segnale; nelle applicazioni audio, ma anche altrove, ta-le rapporto puo essere eccessivamente grande e quindi viene misurato in decibel(dB).
A tale proposito ricordiamo che ildecibele un’unita di misura di tipo logaritmicoche esprime il rapporto fra due livelli di cui uno, quello al denominatore,e presocome riferimento;e un sottomultiplo del poco usato Bel: 10dB = 1B.
La differenza in dB fra due numeri (o due grandezze fisiche dello stesso tipo),come ad esempio due potenzeN1 eN2, e:
DdB = 10 log10
(N1N2
).
Questa unita di misurae particolarmente comoda in molti casi. Quando si devefare uso di formule che usano generalmente moltiplicazioni o divisioni, con i de-cibel esse si trasformano in somme e sottrazioni, semplificando i calcoli; inoltrequando si hanno in gioco grandezze che variano di molti ordini di grandezza la
6

scala logaritmica permette di comprimere la scala, e quindi di parlare di 100 dBinvece che di un rapporto 1 a 10000000000; infine ci sono fenomeni come quelliacustici per cui una scala logaritmica si adatta meglio alla nostra esperienza.
In elettronica ed elettrotecnica, nel calcolo di tensioni o correnti elettriche, essendola potenza proporzionale al quadrato della tensione o della corrente, si usa:
DdB = 10 log10
(N1N2
)2
= 20 log10
(N1N2
)
sfruttando le proprieta dei logaritmi.
IsteresiPuo accadere che certi sensori non diano la stessa risposta per segnali di ingres-so che cambiano valore ciclicamente. L’isteresi misura l’ampiezza dell’errore inqueste condizioni cicliche.
Nonlinearit aGenericamente l’errore di nonlinearita misura la distanza dalla condizione di li-nearita, cioe da quella rappresentata da una funzione di trasferimentoy(u) linea-re. Vi sono diversi modo per quantificare questa distanza; il piu comune paragonala funzione nonlineare con la retta che meglio approssima la funzione stessa nel-l’intervallo di valori considerato. Occorre percio prestare attenzione al metodocon cui si misura questo errore perche potrebbe far apparire il sensore migliore diquello chee in realta.
RumoreTutti i sensori sono soggetti a rumore, ossia aggiungono al segnale di misura unsegnale indesiderato, spesso dovute a fluttuazioni aleatorie o interferenze elettro-niche. Se il rumore del sensoree inferiore alle fluttuazioni della misura o al rumoredell’elettronica presente a valle del sensore, allorae ininfluente; in caso contrarioesso puo degradare le prestazioni dell’intera catena impianto-sensore-controlloree renderla inadatta allo scopo.
Il rumore di solitoe distribuito su un ampio spettro di frequenze e molte sorgentidi rumore producono uno rumore detto “rumore bianco” (white noise), dove ladensita spettrale di potenzae uguale per ogni frequenza. Il rumore viene spessocaratterizzato fornendo ladensita spettraledel valore efficace del rumore, data inunita V/
√Hz.
Trattandosi di “densita”, per ricavare il valore efficace del rumore, occorre inte-grare la densita spettrale nelle banda di frequenza considerata. Una distribuzionedi questa natura somma alla misura un errore di ampiezza proporzionale alla radi-ce quadrata della banda passante del sistema di misura. Poiche vi e una relazione
7

inversa tra la banda passante e il tempo di misura, si puo approssimativamenteaffermare che il rumore diminuisce con la radice quadrata del tempo di misura.
Data l’importanza dell’effetto del rumore sulla bonta dei risultati delle applicazio-ni che fanno uso di sensori (e, principalmente, i sistemi di regolazione e controllo),l’AppendiceA contiene una breve sintesi delle proprieta teoriche del rumore.
Banda passanteTutti i sensori presentano un tempo di risposta finito ad una variazione istantaneadella quantita misurata. Inoltre molti sensori presentano un tempo di decadimento,rappresentato dal tempo necessario per tornare al valore originale dopo una varia-zione a gradino della quantita misurata. L’inverso di questi due tempi fornisce unaindicazione di massima del upper e lower bound della frequenza di taglio (cutofffrequency). La banda passante del sensoree l’intervallo di frequenza tra questidue bound.
Esempio 1.Per illustrare le specifiche, prenderemo come esempio ildata-sheetdi un accelerometroindustriale, l’Analog Device ADXL1503.
Funzione di trasferimentoLa funzione di trasferimentoe data come
V (a) = KV + Kaa
dove a e l’accelerazione da misurare espressa ing, V (a) la tensione in usci-ta dal sensore,KV = 1.5V, Ka = 38 mV·g−1, g l’accelerazione di gravita(9.81m · s−2).
SensitivitaDall’espressione precedente ricaviamo
s =dV (a)
da
∣∣∣∣a=a0
= Ka
In realta le specifiche riportano
V (a) = Vu/2− (s aVu
5V)
doveVu e la tensione di alimentazione del sensore,s la sensitivita. La presenzadel termineVu/5V identifica questi sensori come sensori raziometrici (ratiometricsensor), ossia sensori dove il segnale d’uscitae proporzionale alla tensione dialimentazione.
3Il file di specifiche (data-sheet) puo essere scaricato dal linkhttp://www.ladispe.polito.it/meccatronica/01CFI/documents/sensors/041-05187-3-ADXL150.pdf
8
Coefficiente di temperaturaLa variazione di sensitivita con la temperaturae garantita essere inferiore a 0.025%/◦C.L’offset in assenza di accelerazione, nominalmente pari aKV cambia anch’essocon la temperatura, in ragione di2mg /◦C. Espresso in tensione, questa variazionedi offset non supera 0.3mV/◦C
Range dinamicoIl range dinamicoe definito come±50 g; fuori dal range dinamico none garantitala sensitivita nominale; il sensore puo sopportare fino a 2000g.
IsteresiQuesto sensore non presenta fenomeni di isteresi, o almeno, questi non sonomenzionati nel data-sheet.
Nonlinearit aIl data-sheet definisce la nonlinearita come “The maximum deviation of the AD-XL150 output voltage from a best fit straight line fitted to a plot of accelerationvs. output voltage, calculated as a full-scale output voltage (at 50 g).”
Le specifiche riportano un valore pari allo 0.2% del fondo scala (full scaleFS).
RumoreIl rumore e espresso come densita spettrale e viene dato come 1mg/
√Hz. E
importante riportare integralmente quanto scritto sulle specifiche:
The limiting resolution is predominantly set by the measurementnoise floor4, which includes the ambient background noise and thenoise of the ADXL150 itself.
The level of the noise floor varies directly with the bandwidth of themeasurement5. As the measurement bandwidth is reduced, the noisefloor drops, improving the signal-to-noise ratio of the measurement andincreasing its resolution. The bandwidth of the accelerometer can beeasily reduced by adding low-pass or bandpass filtering.
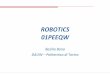
Figure shows the typical noise vs. bandwidth characteristic of theADXL150. The output noise of the ADXL150 scales with the squareroot of the measurement bandwidth. With a single pole roll-off, theequivalent rms noise bandwidth isπ divided by 2 or approximately 1.6times the 3 dB bandwidth. For example, the typical rms noise of theADXL150 using a 100 Hz one pole post filter is:
Noise(rms)= 1 mg/√
Hz×√
100(1.6) = 12.25mg
4Vedi AppendiceA.5Il corsivo e mio.
9

./Figure/ADXL150.eps
Figura 1.2:
Because the ADXL150’s noise is, for all practical purposes, Gaus-sian in amplitude distribution, the highest noise amplitudes have thesmallest (yet nonzero) probability.
As shown by the figure, device noise drops dramatically as the ope-rating bandwidth is reduced. For example, when operated in a 1 kHzbandwidth, the ADXL150 typically have an rms noise level of 32 mg.When the device bandwidth is rolled off to 100 Hz, the noise level is re-duced to approximately 10 mg. Alternatively, the signal-to-noise ratiomay be improved considerably by using a microprocessor to performmultiple measurements and then to compute the average signal level.
Banda passanteLa banda passante del sensore dipende dai filtri che vengono posti in serie al cir-cuito di misura. Come sie visto sopra, se la banda passante diminuisce, il rumoresi puo ridurre anche considerevolmente.
1.2 Tipi di sensore
I sensori possono essere classificati secondo diversi criteri; a livello funzionale di solitosi classificano i sensori inpropriocettorieeterocettori, come segue.
10
PropriocettoriSono i sensori che misurano le grandezzeinterne dei robot, come posizioni evelocita dei giunti, stato delle batterie di alimentazione di bordo, temperatura deimotori ecc.
EterocettoriSono i sensori che misurano le grandezzeesterneai robot, come la distanza daostacoli, la posizione assoluta dei robot nello spazio, la forza applicata all’estre-mita del braccio da parte dell’ambiente ecc.
E anche molto comune classificare i sensori secondo il tipo di grandezza misurata, comesegue.
Sensori di spostamento (lineare o angolare).Essi misurano lo spostamento relativo trauna parte fissa e una parte mobile (sensori relativi) oppure lo spostamento assolutoda uno zero convenzionale (sensori assoluti). Se entrambe le parti fissa e mobileappartengono al robot si ha un propriocettore, come nel caso della misura di ro-tazione di una ruota di un robot mobile. Se invece la parte fissa e quella mobileappartengono a due oggetti funzionalmente separati, come il braccio di un robote un ostacolo esterno, oppure il braccio di un robot e un pezzo in un magazzino,si parla di eterocettori o meglio, di sensori di distanza (vedi piu avanti). Se ladistanzae “piccola” e si vuole solo fornire un segnale logico che sia On quando siavverte la presenza di un oggetto entro un intervallo prefissato di distanza, si parladi sensori di prossimita (vedi oltre).
Sensori di posizione/orientamento assoluti.Questi sensori possono essere considera-to sensori di distanza assoluti, ma si preferisce chiamarli sensori di posizione, inquanto permettono di misurare la posizione del corpo su cuie montato il sensorerelativamente ad un sistema di riferimento assoluto convenzionale. Tipici sonoi sensori GPS, che forniscono le coordinate del corpo secondo il riferimento la-titudine/longitudine accettato universalmente. Alcuni di questi sensori, possonoanche fornire l’assetto (ossia l’orientamento) rispetto alla direzione preferenziale(di solito il Nord magnetico)
Sensori di velocita (lineare o angolare).
Sensori di accelerazione (lineare o angolare).
Sensori di distanza.
Sensori di prossimita.
Sensori di contatto.
11
Sensori di forza o coppia.
Sensori tattili.
Sensori di visione. I sensori di visione possono svolgere numerose funzioni, tra cui mi-surare la posizione assoluta o relativa, la velocita, le dimensioni di un oggetto, al-cune caratteristiche fisiche (sensori a infrarossi misurano le temperature dei corpi).Per questi motivi sono considerati come una categoria a parte.
Vi sono classi di sensori che non verranno prese in considerazione, perche non sonocomunemente applicate alla robotica, come i sensori di temperatura, di pressione, diflusso, di concentrazione ecc.
I sensori possono fornire letturelogicheoppuremisure continue, essere di tipoanalogicooppuredigitale,
Sensori ON-OFF. Forniscono una risposta binaria o logica, che indica il superamentoo meno di una soglia numerica prefissata in sede di taratura. Sono di questo tipo isensori di contatto e alcuni sensori di prossimita.
Sensori a misura continua.Forniscono una lettura continua, all’interno di un certo in-tervallo di valori, garantendo un livello di accuratezza, risoluzione e ripetibilitache sono specifici del sensore usato.
Sensori analogici.Trattano i segnali elettrici come fossero grandezze continue (analo-giche), ossia utilizzando dispositivi propri dell’elettronica analogica.
Sensori digitali. Operano sui segnali, campionandoli e quantizzandoli per poter uti-lizzare dispositivi propri dell’elettronica digitale, come quelli che si trovano neicalcolatori digitali.
Sensori analogici possono dare letture ON-OFF, cosı come sensori digitali possono (darel’impressione di) fornire letture continue.
1.3 Sensori di spostamento angolare
Sono i propriocettori piu comuni, utilizzati sia nei robot industriali sia nei robot mobili(rover); essi forniscono la misura dell’angolo assoluto, a partire da uno “zero” conven-zionale, o dell’incremento angolare (misura relativa) dei giunti di una catena cinematicao dei motori delle ruote di un rover. Si basano su diverse categorie di fenomeni fisi-ci: il conteggio del numero ditaccheche vengono rilevate da un dispositivo opportuno,oppure la variazione di ampiezza e/o frequenza di forme d’onda in circuiti accoppiati
12

elettrostaticamente o elettromagneticamente, la cui caratteristica dipende dalla posizio-ne reciproca dei circuiti. Alla prima categoria appartengono gliencoder, le righe ottichee i sensori angolari aeffetto Hall, alla seconda iresolvere i “syncro”.
1.3.1 Encoder
Gli encoder si possono dividere in due sotto-categorie: gliencoder assolutie gli encoderrelativi.
Negli encoder relativi, detti anche encoderincrementali i segnali elettrici d’uscita sonoproporzionali allo spostamento di una parte rotante (rotore) rispetto ad una parte solidaleal corpo (statore); semplici circuiti elettronici possono effettuare il conteggio di taccheo righe ottiche, magnetiche, meccaniche o altro, uniformemente distribuite sul rotore osullo statore, producendo segnali proporzionali alla posizione, velocita e talvolta ancheaccelerazione dell’asse in esame.
La posizione assoluta del rotore none di per se rilevabile, essendo le tacche tutte uguali,ma puo essere ricavata con vari artifici, aggiungendo ad esempio una tacca particolare,dettariferimento, e conducendo un’operazione iniziale di ricerca riferimento.
La ricerca del riferimentoe un operazione per cui il circuito di controllo muove l’asse, inmodo da leggere un segnale di riferimento (tacca di zero o di riferimento), generato dal-l’encoder stesso, o da una fonte esterna, che individua la posizione da considerarsi comelo zero dell’asse. Su questo punto vengono azzerati i contatori, e, da quel momento, laposizione del rotore sara nota per il costante aggiornamento dello spostamento rispettoa questo zero.
Esiste anche la possibilita di rilevare il senso di rotazione.
Negli encoder assolutile tacche stesse sono costruite in modo da contenere la codificadiretta dell’informazione di posizione; un opportuno circuito decodifica l’informazionee fornisce esatta posizione dell’elemento rotante rispetto al corpo; in qualsiasi momentosi puo quindi ricavare e visualizzare la posizione angolare dell’asse in esame. I da-ti relativi allo spostamento dell’asse (direzione, velocita e accelerazione) sono derivatidall’elaborazione della sua posizione assoluta nel tempo.
Gli encoder possono essere realizzati basandosi su diversi principi di trasduzione:
• encoder ottici: sfruttano le proprieta di trasmissione della luce attraverso taccheottiche.
• encoder capacitivi: le tacche sono costituite da elementi capacitivi.
• encoder induttivi: le tacche sono costituite da elementi induttivi.
• encoder potenziometrici.
13

Nel seguito presenteremo solo gli encoder basati su tacche ottiche, in quanto sono quelliattualmente piu utilizzati in robotica.
1.3.2 Encoder ottici
Un encoder ottico consiste essenzialmente di cinque parti (si vedano le Figure??, ?? e??): (1) una sorgente luminosa, di solito solidamente collegata alla parte fissa; (2) unaserie di tacche o settori, alternativamente opachi e trasparenti, ricavati sulla parte mobilee posti tra la sorgente luminosa e il suo circuito di rilevamento; (3) una maschera fissache blocca raggi luminosi estranei (non sempre presente in encoder di minore qualita);(4) un sensore di luce e infine (5) un circuito elettronico di rilevamento e decodifica.
Spesso la sorgente luminosae costituita da uno o piu LED (Light Emitting Diode); ilsensore di luce puo essere un fotodiodo un fototransistor o un trasduttore fotovoltaico.
Encoder ottici incrementali
Sono utilizzati in modo esclusivo quando la misura richiestae quella di velocita, masono anche molto diffusi per la misura di rotazione incrementale.
La rotazione delle tacche produce una sequenza di interruzioni – in linea di principioistantanee – del raggio luminoso, che cosı genera un treno d’onde quadre, la cui fre-quenzae proporzionale alla velocita di rotazione. Il conteggio dei fronti d’onda positivio negativi fornisce una misura dell’incremento angolare dalla parte mobile.
E possibile determinare il senso di rotazione in due modi diversi: sia utilizzando due in-siemi di tacche ottiche e due fotocellule leggermente sfasati l’uno rispetto all’altro lungola circonferenza del disco, come schematizzato in Figura??, sia utilizzando uno soloinsieme di tacche e due fotocellule, come schematizzato in Figura?? NON E SCHEMA-TIZZATO.
Nella realta i fenomeni di diffusione e diffrazione della luce tendono a creare un trenod’onde non perfettamente quadre ede necessario che il circuito di rilevamento sia ingrado di gestire questa non perfetta aderenza al modello teorico.
Si definiscerisoluzionedi un encoder incrementale il numeroN di tacche sulla circon-ferenza; si ottiene molto semplicemente che, dettor il raggio medio a cui sono poste letacche e la larghezza delle tacche (che si suppone uguale alla distanza tra due tacchesuccessive), la risoluzione vale
N =πr
`
14
Encoder ottici assoluti
Posizionando opportunamente denti o foraturee possibile codificare un settore di rotorepari alla sua risoluzione angolare.
Encoder capacitivi/induttivi Questi encoder si basano sulla variazione di capacita odi induttanza prodotta dai denti di un ingranaggio o dalle forature presenti su un discometallico. L’ingranaggio o il disco costituiscono il rotore dell’encoder. Posizionandoopportunamente denti o foraturee possibile codificare un settore di rotore pari alla suarisoluzione angolare.
Encoder potenziometrici Questi encoder si basano sulla caratteristica che ha un po-tenziometro di fornire un segnale in tensione proporzionale alla lunghezza di un con-duttore metallico di resistivita nota. Questi tipi di encoder sono pertanto solo di tipoassoluto.
1.3.3 Righe Ottiche
1.3.4 Sensori angolari a effetto Hall
1.3.5 Resolver e Syncro
15
Appendice A
Rumore e sua caratterizzazione
A.1 Terminologia
Spesso si usano i termini “errore,” “scarto,” “disturbo,” “rumore ” come se fossero inter-cambiabili, mentre non lo sono.E opportuno percio fornire una definizione chiara delloro significato.
ErrorePererroresi intende la differenza tra il valore istantaneo di due segnalia(t) eb(t);pero, se non ci si mette d’accordo, si puo equivocare, perche potrebbe essere siae(t) = a(t)− b(t), siae(t) = b(t)− a(t).
I controllisti di solito definisconoerrore la differenza tra un segnale di riferimentor(t) e un segnale di misuray(t) proveniente dai sensori, per cui
e(t) = r(t)− y(t) (A.1)
in coerenza con il segnale presente a valle del comparatore in ingresso ai control-lori.
I misuristi, invece, parlano discarto(di misura), come la differenza tra la variabile“vera” v(t) (posto che esista) e la misura della stessay(t)
s(t) = v(t)− y(t)
mentre definiscono l’errore come l’opposto dello scartoe(t) = −s(t), e quindiesattamente al contrario dei controllisti.
Per evitare equivoci, qui si utilizzera sempre la definizione (A.1).
16
RumoreIn inglese dettonoise, il rumore e un segnale che si genera o entra, in modinon tutti noti, nel sistema che stiamo controllando o nella catena di misura chestiamo utilizzando, in modo spesso continuativo, ma sempre indipendentementedalla volonta dell’utilizzatore.
Esso possiede caratteristiche di ampiezza e frequenza non modellabili determi-nisticamente, per cui non sappiamo fare altro che descriverlo con un modelloprobabilistico o stocastico.
Il rumore viene anche definito dai misuristi come unafluttuazionenon prevedi-bile e non ripetibile, che non puo essere corretta da una calibrazione dei sensori,contrariamente aglierrori sistematiciche sono prevedibili e ripetibili e possonoessere corretti da una procedura di calibrazione.
Vedremo nella Sezione successiva come si modella il rumore e quali sono le sueprincipali caratteristiche che permettono di trattarlo ingegneristicamente.
DisturboCon disturbo si vuole indicare un segnale che entra indesiderato nel sistema onella catena di misura. Si differenzia dal rumore perche il disturbo, pur presen-tandosi in modi che non sono sotto il “controllo” dell’utente, si puo modellare inmodo deterministico.
Ad esempio, una coppia applicata improvvisamente ad un motore che agisce suun carico noto, a causa dell’improvvisa variazione di un’inerzia, di un attrito o diqualche altro fenomeno, si definiscecoppia di disturbo. Se conoscessimo il valoredell’inerzia e l’istante in cui viene applicata al carico, non avremmo difficolta amodellarla e quindi a contrastarla. Invece la non perfetta conoscenza dell’uno edell’altro fanno sı che sia necessario un controllo in catena chiusa per eliminarnegli effetti, dopo un breve transitorio.
Un altro esempio; un autopilota di aereo mantiene la traiettoria prefissata, maun improvvisa raffica di vento agisce sulla struttura e ne fa deviare il cammino.Anche qui diciamo che si tratta di un disturbo, solo un po’ piu complicato damodellare, perche la raffica sara verosimilmente un segnale difficilmente o solo inparte definibile in modo deterministico.
Un terzo esempio: la componente di disturbo dovuta alla rete elettrica a50Hz,che si accoppia elettromagneticamente con il conduttori o le componenti del siste-ma di misura, di solito si chiama disturbo elettromagnetico, perche e abbastanzafacilmente descrivibile sia in ampiezza sia in frequenza, anche se spesso non sipuo eliminare, ma solo attenuarne gli effetti.
Spesso si confonde disturbo ed rumore. Molti parlano di rumore deterministico odi disturbo aleatorio. Qui si preferisce riservare il terminerumoread un segnale
17

sempre presente nel sistema, caratterizzato da un modello statistico (o stocastico,come si dice) e parlare didisturboquando si voglia far riferimento ad un segnaledi solito deterministico (altrimenti si dice trattarsi di un disturbo aleatorio) che sipresenta ogni tanto.
ScartoVedi errore.
A.2 L’errore
Il rumore puo generarsi entro il sensore, e verra dettorumore intrinseco, oppure fuoridal sensore, e verra dettorumore estrinsecoo ancheinterferenza.
Il rumore puo essere dovuto a cause naturali inevitabili (rumore fondamentale) oppure aeffetti delle imperfezioni costruttive.
Il valore istantaneo dell’ampiezza e della fase non possono essere predetti in alcun mo-do, ma sono caratterizzabili solo statisticamente. L’erroree percio un segnale aleatoriocontinuo o discreto, caratterizzato da una distribuzione di probabilita. Nella Sezioneseguente riassumiamo alcuni concetti di probabilita che riteniamo utili.
A.2.1 Variabili casuali, distribuzione e densita
Unavariabile casualeo aleatoriae una variabile il cui valore dipende dal risultato di unesperimento casuale. Unsegnale casualeo aleatorio e un segnale che si genera comerisultato di un evento casuale1; indicheremo le variabili casuali con la lettera maiuscola.Diremo che la variabile casualee continua se assume valore nell’insieme dei reali; dire-mo invece che la variabile casualee discreta se puo essere messa in relazione biunivocacon l’insieme degli interi. Ad esempio, la variabile
X = {peso del prossimo neonato che nascera a Roma}
e una variabile casualecontinua, mentre la variabile
Y = {prossimo primo numero estratto sulla ruota del Lotto di Roma}
e una variabile casualediscreta. Le variabili aleatorie possono essere vettoriali o scalari;per semplicita qui consideriamo solo variabili scalari.
Ricordiamo che, data una variabile aleatoriaX, si puo costruire la funzioneFX(x) dettafunzione didistribuzione di probabilita (FDP), che consente di descrivere la probabilita
1La definizione di segnale continuo casualee piu complessa, ma ci limitiamo a questa, per brevita
18

che haX di assumere certi valori:
FX(x) = Prob{X ≤ x}
dove Prob{X ≤ x} indica la probabilita cheX sia minore o uguale al valore realex.
Per unavariabile aleatoria continua e possibile definire la funzionefX(x) di densitadi probabilita come la derivata della FDP
fX(x) =dFX(x)
dx
e, ovviamente
FX(x) =∫ x
−∞fX(ξ)dξ
Una proprieta importantee che l’area totale sotto la funzione di densita deve avere valoreunitario: ∫ ∞
−∞fX(x)dx = 1
Nel caso divariabile aleatoria discreta si utilizza la funzione didensita di massa,definita come
fX(k) = Prob{X = k}La funzione di distribuzionee allora data da
FX(k) = Prob{X ≤ k} =k∑
i=−∞Prob{X = i} =
k∑
i=−∞fX(i)
e, dati due numeri interik1 < k2,
Prob{k1 < X ≤ k2} = FX(k2)− FX(k1)
eProb{k1 ≤ X ≤ k2} = FX(k2)− FX(k1 − 1)
Quando una variabile o un segnale aleatorio si “concretizza” come risultato di un espe-rimento, si parla direalizzazionedella variabile o del segnale.
Valore atteso e varianza
Data una variabile casualeX, esistono alcune grandezze che ne definiscono le proprieta;tra queste, ilvalore atteso(expected valuein inglese), indicato con il simboloE{X} =µx, e lavarianza, indicata dal simbolo Var{X} = σ2
x.
19

Nel caso di variabili continue aventi densita di probabilita fX(x), il valore atteso (dettoanchevalor medioo media) e definito come
E{X} ≡ µx =∫ ∞
−∞xfX(x) dx
Il momento di ordinen e definito come
E{Xn} =∫ ∞
−∞xnfX(x) dx
Il momento centrato di ordinen e definito come
E{(X − µx)n} =∫ ∞
−∞(x− µx)nfX(x) dx
Particolarmente importantee il momento centrato di ordine 2, che prende il nome divarianza (in inglesevariance)
Var{X} ≡ σ2x = E{(X − µx)2} =
∫ ∞
−∞(x− µx)2fX(x) dx = E{X2} − µ2
x
La radice quadrata della varianza prende il nome dideviazione standard(in inglesestandard deviation)
σx =√
σ2x
In generale, seφ(·) e una funzione di variabile aleatoria reale continua, il valore attesodi φ(X) e dato da
E{φ(X)} =∫ ∞
−∞φ(x) fX(x) dx
Per una variabile casuale discretaX, avente densita di massafX(k), con k interi, ilvalore atteso si definisce come
E{X} ≡ µx =∞∑
k=−∞kfX(k)
e la varianza come
Var{X} ≡ σ2x = E{(X − µx)2} =
∞∑
k=−∞(k − µx)2fX(k) = E{X2} − µ2
x
In generale, per due variabili casuali continue o discreteX eY , vale
E{X + Y } = E{X}+ E{Y }E{αX} = αE{X}
20

doveα e una costante.
In altre parole, l’operatore valore attesoe un operatore lineare. Si ha inoltre che
E{XY } = E{X}E{Y }se le variabili aleatorieX eY sono tra loroindipendenti. Per quanto riguarda la varianza,si ha
Var{X + Y } = Var{X}+ Var{Y }Var{αX} = αVar{X}
Va notato che la deviazione standard di una somma di variabili aleatorie none la sommadelle deviazioni standard; infatti
σx+y =√
σ2x + σ2
y
Esempi di densita di probabilit a continue
Densita uniforme: la densita di probabilita si diceuniformesu un intervallo[a, b]secome
fX(x) =
1b− a
sex ∈ [a, b]
0 altrimenti
Il valor medio della densita uniformee
µ =(a + b)
2
e la varianzae
σ2 =(b− a)2
12
Densita Gaussiana: insieme alla densita di probabilita uniforme, la densita di proba-bilit a gaussianae quella che caratterizza piu comunemente il rumore nei sensori.Essae anche dettadistribuzione normale; ha mediaµ e varianzaσ2, viene denotatadal simboloN(µ, σ2) e ha espressione
N(µ, σ2) =1
σ√
2πe−
(x−µ)2
2σ2
Densita esponenziale: la densitaesponenzialedi parametroλ > 0 e definita come
fX(x) = λe−λx
ed ha valor medioµ = 1/λ e varianzaσ2 = 1/λ2.
21

Auto-correlazione e auto-covarianza
Il materiale presentato nel seguitoe stato tratto prevalentemente dal testo [2].
Se stiamo trattando unsegnale aleatorio continuoX(t), ove il valore del segnale adogni istante di tempo obbedisce ad una qualche legge statistica,e importante fornireanche la caratterizzazione di come il valore del segnale al tempot1 (o al campionek1)sia “legato” statisticamente al valore dello stesso segnale al tempot2 (o al campionek2).Queste caratteristiche sono descritte dall’auto-correlazione.
L’ auto-correlazioneR(t1, t2) di un segnale aleatorioX(t) e il momento congiunto delledue variabili aleatorieX(t1) eX(t2), ossia il valore atteso del loro prodotto:
R(t1, t2) = E{X(t1)X(t2)} =∫ ∞
−∞x1 x2 f(x1, x2; t1, t2)dx1dx2
Poiche ad ogni istanteti il valore che il segnale puo assumeree una variabile anch’essaaleatoria che ha un suo valore attesoµx(ti), ha senso calcolare la funzione diauto-covarianzaC(t1, t2), definita dalla seguente relazione
C(t1, t2) = E{[X(t1)− µx(t1)][(X(t2)− µx(t2)]}
Considerando le due precedenti relazioni, si vede che esiste un legame tra auto-covarianzae auto-correlazione, dato da
C(t1, t2) = R(t1, t2)− µx(t1)µx(t2)
Quella che chiamiamovarianzae, piu precisamente, l’auto-covarianza al generico tempoti:
σ2x(ti) = C(ti, ti) = R(ti, ti)− µ2
x(ti)
In generale, la varianzaσ2x(t) e funzione del tempot, come pure il valore sperato
µx(ti); se il valore speratoe zero ovunque, auto-covarianza, varianza e autocorrelazionecoincidono.
I segnali aleatori si dicono realizzazioni di processi stocasticistazionari, se la auto-correlazione e l’auto-covarianza dipendono esclusivamente dalla differenza temporaletra t1 e t2.
Percio, dettoτ = t1 − t2, nei processi stazionari avremo
E{X(t)} = µx costante
R(t1, t2) ≡ R(τ) = E{X(t + τ), X(t)} = −R(τ)C(t1, t2) ≡ C(τ) = R(τ)− µ2
x
C(0) = R(0)− µ2x = σ2
x ≥ 0 costante
22

Dall’ultima relazione si osserva che quella che comunemente si chiama “varianza” di unrumore (stazionario) none nient’altro che l’auto-covarianza perτ = 0; essae costante,cosı come il valor medio del segnale.
Il prefisso “auto” sta ad indicare che la grandezza indicatae calcolata relativamente acampioni in instanti diversi dellostessosegnale; vedremo piu avanti chee possibileindividuare analoghe grandezze relative a segnali diversi, e allora si parlera di mutua-correlazione. Spesso, quandoe chiaro dal contesto, il prefisso “auto” viene omesso e siparla piu semplicemente di correlazione e covarianza.
Se trattiamo unsegnale aleatorio discretoX(k), per semplicita stazionario, allora leformule sono le seguenti:
E{X(k)} = µx costante
R(k1, k2) ≡ R(m) = E{X(k1 + m), X(k1)} = −R(m) m = k2 − k1
C(k1, k2) ≡ C(m) = R(m)− µ2x
C(0) = R(0)− µ2x = σ2
x ≥ 0 costante
Mutua correlazione e mutua covarianza
Quando abbiamo da trattaredue processi aleatori continui distinti e, per semplicita,stazionari X(t) e Y (t), possiamo esprimere grandezze analoghe all’auto-correlazionee all’auto-covarianza, che ora prenderanno il nome dimutua correlazione(o correla-zione mutua) e mutua covarianza(o covarianza mutua). In inglese si chiamanocross-correlationecross-covariance. Esse si definiscono come segue:
mutua correlazione:RXY (τ) = E{X(t + τ)Y (t)} = RXY (−τ)mutua covarianza:CXY (τ) = E{[X(t + τ)− µx][Y (t)− µy]} = RXY (τ)− µxµy
Si nota che l’auto-correlazionee semplicemente una mutua correlazione tra i campionidello stesso processo
R(τ) ≡ RX(τ) ≡ RXX(τ)
e cosı pure per l’auto-covarianza
C(τ) ≡ CX(τ) ≡ CXX(τ) ≡ RXX(τ)− µXµX ≡ R(τ)− µ2
Se un segnalee la somma di altri due segnali, comeZ(t) = X(t) + Y (t), allora avremo
RZZ(τ) = RXX(τ) + RXY (τ) + RY X(τ) + RY Y (τ)
23

Se i due segnali sono statisticamenteindipendentio ortogonaliavremo semplicementeche i termini misti si annullano
RZZ(τ) = RXX(τ) + RY Y (τ)
Se un segnalee il prodotto di due segnaliZ(t) = X(t)Y (t), la mutua correlazione nonpuo in generale essere espressa in funzione dei momenti del second’ordine. Se pero idue segnali sono statisticamente indipendenti, allora vale la seguente relazione
RZZ(τ) = RXX(τ)RY Y (τ)
Vale inoltre la seguente diseguaglianza:
−R(0) ≤ R(τ) ≤ R(0)
da cui si osserva che la correlazionee massima perτ = 0.
Quando abbiamo da trattaredue processi aleatori discreti distintiestazionari X(k) eY (k), avremo
RXY (m) = E{X(k1 + m)Y (k1)} = RXY (−m)CXY (m) = E{[X(k1 + m)− µx][Y (k1)− µy]} = RXY (m)− µxµy
C(m) ≡ CX(m) ≡ CXX(m) ≡ RXX(m)− µXµX ≡ R(m)− µ2
m = k2 − k1
Spettro e densita spettrale di potenza di segnali stazionari
Lo spettro di potenza(in inglesepower spectrum) di un segnale aleatorio stazionarioesemplicemente la trasformata di Fourier della funzione di (auto-)correlazione, come ve-dremo meglio piu avanti; none invece, come alcuni ritengono erroneamente, la rappre-sentazione armonica (cioe le componenti in ampiezza e fase in funzione della frequenza)di una particolare realizzazione del segnale stesso.
Lo spettro di potenza(in inglesepower spectrum) di un segnale aleatorio stazionariocontinuoe definito come la trasformata di Fourier della funzione di auto-correlazione:
S2(ω) = F [R(t)] =∫ ∞
−∞e−j ωξ R(ξ) dξ
Per segnali discreti avremo
S2(ω) =∞∑
k=−∞e−j ωm R(m)
24

Quest’ultima relazione puo essere scritta in funzione della frequenza in Hz, considerandola relazioneω = 2πf/fc, dovefc e la frequenza di campionamento che si suppone avergenerato il segnale discreto.2; avremo quindi
S2(f) =∞∑
k=−∞e−2πjfm R(m)
Alcuni testi, tra cui [2] e i manuali del “Signal Processing Toolbox” di Simulink, indica-no lo spettro con il simboloS(ω) invece cheS2(ω); qui utilizzeremo sempre l’esponente2, per mettere in evidenza la relazione con il concetto di potenza.
Dalla formula di inversione delle trasformate di Fourier deriva che, per i segnali continui
R(τ) = F−1[S2(ω)] =12π
∫ ∞
−∞e−j wτ S2(w) dw 3
Perτ = 0 risulta quindi
R(0) = E{|X(t)|2} =12π
∫ ∞
−∞S2(w) dw = σ2
x + µ2x (A.2)
Se il segnale aleatorioe reale alloraS2(−ω) = S2(ω).
Per i segnali discreti avremo
R(m) =12π
∫ π
−πe−j wm S2(w) dw =
1fc
∫ fc/2
−fc/2e−j mf/fc S2(w) df
e
R(0) =12π
∫ π
−πS2(w) dw =
1fc
∫ fc/2
−fc/2S2(w) df
Il fatto cheR(0) coincida conE{|X(t)|2}, giustifica il termine di spettro dipotenza, inquanto, seX(t) fosse, ad esempio, una tensione aleatoriaX(t) = v(t), il suo quadratosarebbe proporzionale alla potenza del segnale.
La densita spettrale di potenza(in inglesepower spectral densityPSD)e definita comeil rapporto
P 2(ω) =S2(ω)
2πP 2(f) =
S2(f)fc
2Si da per scontato che il campionamento sia avvenuto considerando i vincoli di anti-aliasing impostidalla relazione tra frequenza di campionamento e frequenza di bandafc ≤ 0.5fb in un segnale a bandalimitatafb.
3Notare la differenza tra la variabile di integrazionew e la pulsazioneω.
25
Essa rappresenta quindi la densita con cui si distribuisce, frequenza per frequenza, lapotenza del segnale.
Se il valore atteso del segnalee nullo, allora dalla (A.2) si ha∫ ∞
−∞S2(w) dw = 2πσ2
x
da cui si ricava che
σ2x =
∫ ∞
−∞P 2(w) dw
Se il segnale ha banda limitatafc, si ha
σ2x =
∫ fc/2
−fc/2P 2(f) df
L’area sotto la curva della PSD rappresenta la varianza del segnale e, per quanto diceva-mo sopra, anche la potenza del segnale.
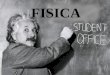
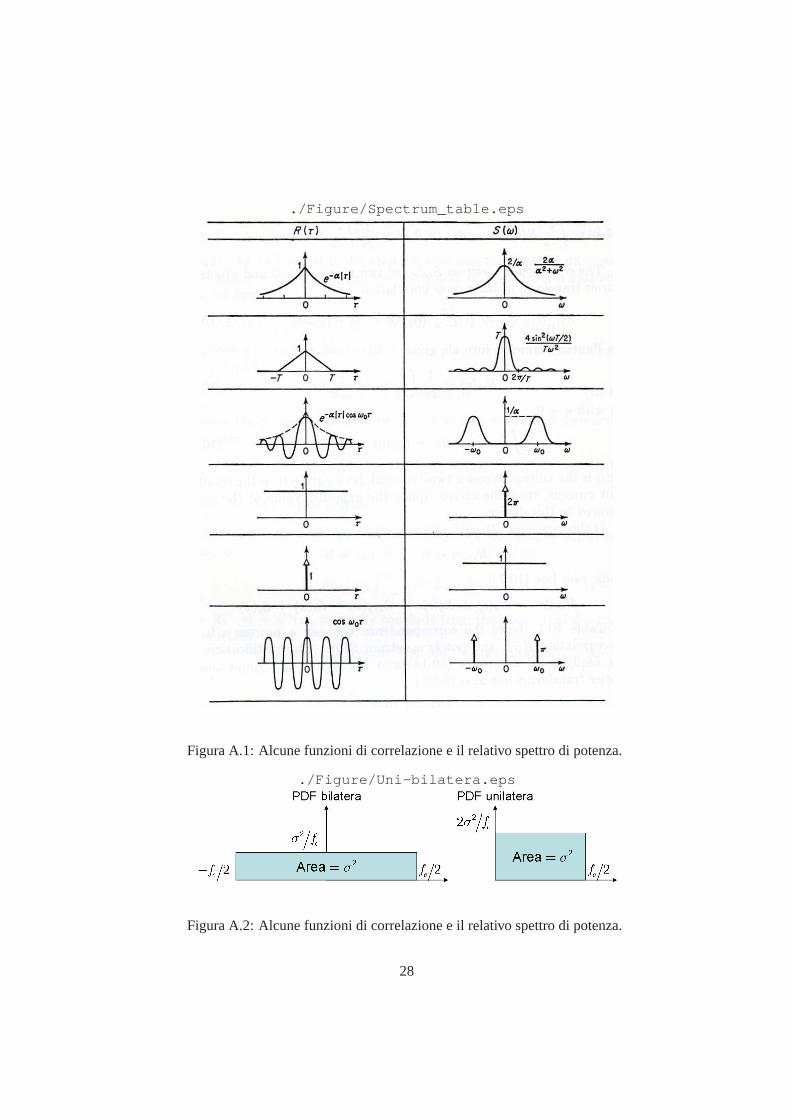
Nella Tabella illustrata in FiguraA.1 si hanno alcuni esempi di correlazioni e spettri dipotenza.
Da ultimo, facciamo notare che esiste una grande confusione tra i simboli adottati daivari testi, manuali e data-sheet. Spesso si usa il simboloS2(f) per indicare la PSD,invece del simboloP 2(f) adottato qui; altre volte si usa, come gia detto, il simboloS(f) per la PSD; una regola pratica suggerisce che se le dimensioni dell’ordinata sonoin dB, si avra presumibilmente a che fare con uno spettro di potenza, se sono in dB/Hz,si avra presumibilmente a che fare con la PSD, se sono in V (spesso con rms accanto)si tratta del valore efficace del segnale
√S2(f), se sono dati in V(rms)/Hz, si tratta
presumibilmente di densita di valore efficace del segnale√
P 2(f) e per trovare il valoreefficace occorre integrare nell’intervallo di frequenze considerato.
A.2.2 Rumore bianco
Particolarmente interessante e importantee la PSD costante, che fornisce un modello peril cosiddettorumore bianco, cioe un segnale aleatorio a valor medio nullo che possiedeuguale potenza per intervallo unitario di frequenze. Il rumore bianco puo avere qualsiasidistribuzione, ma i principali rumori riscontrabili nei sensori possiedono distribuzioneuniforme (rumore bianco uniforme) oppure gaussiana (rumore bianco gaussiano).
Il fatto che la PSD di un rumore bianco si estenda per frequenze che vanno da−∞ a∞e solo una proprieta teorica; nella pratica il segnale avra una banda di frequenza limitata,ad esempio, da−ωc = −2πfc aωc = 2πfc. Anche in questo caso la potenza media e la
26
varianza del segnale sono rappresentate dall’area sotto la curva della PSD
R(0) = E{|X(t)|2} = σ2x =
∫ ωc
−ωc
P 2(w) dw =∫ fc
−fc
P 2(f) df
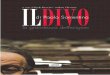
La curva della PSD spesso si riporta utilizzando scale logaritmiche sia in frequenzasia in ampiezza, esprimendo la potenza in dB oppure no, a seconda dei casi. Poichela scala dell’asse logaritmico va da0 a +∞, molti preferiscono raddoppiare il valoredell’ordinata della PSD in modo che l’area sottesa alla curva sia uguale alla varianza;in tale caso si dice che la PSDe unilatera (vedi FiguraA.2). Occorre ancora una voltaprestare attenzione alle convenzioni utilizzate nei documenti di specifica per capire se sitratta di PSD bilatera o unilatera.
A.2.3 Origine e modelli dell’errore
Per semplicita di linguaggio, consideriamo che il segnale di rumore sia esprimibile comeuna tensione.
Consideriamo sempre un segnale caratterizzato dal suovalore efficaceo rmsnell’inter-vallo ∆T
vrms =
√1
∆T
∫ t+∆T
t[v(τ)]2 dτ .
Ricordiamo che lo spettro di potenza fornisce appunto la potenza del segnale, quindiun’informazione sulla distribuzione in frequenza del quadrato del valore efficace del-la tensione. Se vogliamo conoscere la tensione del rumore, chee poi quella che sisovrappone al segnale utile mascherandolo, occorre calcolarne la radice quadrata.
Questae l’origine delle “strane” unita di misura che contraddistinguono nei data-sheetla PSD del rumore, cioe V ·Hz−1/2 oppureV/
√Hz.
Possiamo ora cercare di caratterizzare come e dove nasce il rumore presente nei sensorie, piu in generale, nei componenti elettronici. Ci sono fondamentalmente cinque tipi dirumore:
1. Shot Noise
2. Rumore termico
3. Flicker noise
4. Burst noise
5. Avalanche noise
27
./Figure/Spectrum_table.eps
Figura A.1:Alcune funzioni di correlazione e il relativo spettro di potenza.
./Figure/Uni-bilatera.eps
Figura A.2:Alcune funzioni di correlazione e il relativo spettro di potenza.
28

Spesso esistono piu tipi di rumore che influenzano contemporaneamente il sensore, marisulta sempre difficile essere in grado di separarne gli effetti. Ciascuno di questi ru-mori e caratterizzato da un modello in frequenza e quindie possibile, con opportuniaccorgimenti, rendere minime le loro influenze, soprattutto nella banda di interesse perl’applicazione.
Shot noise Talvolta viene chiamatorumore quantistico(quantum noise) o rumore digranularita e prende il nome da Walter Schottky, che nel 1918 lo scoprı nei tubi elet-tronici e sviluppo il teorema di Schottky. Il shot noisee sempre associato al flusso dicorrente; cessa quando la corrente cessa ede indipendente dalla temperatura.
Esso viene generato quando le cariche elettriche attraversano le barriere di potenzia-le presenti nei diodi e nei transistori. Tale attraversamentoe un evento puramentecasuale, dunque la corrente che viene osservata puo essere considerata come l’effettomacroscopico di impulsi casuali di corrente.
Questo rumore possiede anche altre caratteristiche:
• Lo spettroe piatto, cioe ha una PSD niforme.
• Essoe presente in tutti i conduttori – non solo nei semiconduttori – mae moltopiu contenuto nei conduttori che nei semiconduttori.
Il valore efficace dello shot noisee dato, in tensione, dalla seguente relazione
Esh = kT
√2B
qIcc
dove:
k costante di Boltzmann(1.38× 10−23 J/◦K)q carica dell’elettrone(1.6× 10−19 C)T temperatura in◦KIcc valore medio della corrente continua che interessa il conduttoreB banda di frequenza inHz
Rumore termico
Il rumore termico(thermal noise), detto ancheJohnson noisedal nome del suo scoprito-re, e generato dalle fluttuazioni aleatorie degli elettroni in un conduttore causate dall’e-nergia termica. Questa aggiunge una componente di moto aleatorio al loro movimento,producendo una variazione di tensione, percepita come rumore; il rumore termico siannulla solo allo zero assoluto di temperatura.
29

Come lo shot noise, il rumore termico ha uno spettro di potenza piatto (cioeebianco), mail rumore terminoe indipendente dall’intensita di corrente nel conduttore. Per frequen-ze inferiori a100Mhz, il rumore termico puo essere calcolato utilizzando la relazionescoperta da Nyquist:
Et =√
4kTRB; It =
√4kTB
Ra seconda che lo si voglia esprimere in tensione o in corrente, dove:
k costante di Boltzmann(1.38× 10−23 J/◦K)T temperatura in◦KR valore della resistenza equivalente del conduttoreB banda di frequenza inHz
Flicker noise
Questo tipo di rumore ha un nome che non viene tradotto in italiano:flicker significatremolare, come di una lontana fiammella nell’oscurita. Esso viene anche detto rumore1/f (one-over-f noise), per la caratteristica del suo spettro, orumore rosa, come vedremomeglio oltre.
Essoe presente in tutte le componenti attive e in molte componenti passive dei circuitielettronici e anche in altri campi della fisica (come nei segnali di origine astronomica).Nei dispositivi attivi e dovuto a trappole che catturano e rilasciano in modo casualeportatori di carica, causando fluttuazioni nel flusso di corrente di natura casuale.
Le sue caratteristiche si possono riassumere come segue
• Diminuisce al crescere della frequenza, da cui il nome1/f .
• Lo spettro di potenza e piatto nello spazio logaritmico, ovvero ha la stessa potenzain bande che sono uguali logaritmicamente:
Eflicker = Kv
√log
fmax
fmin
dove
KV costante che fornisce la tensione a 1 Hzfmax; fmin massimo e minimo valore delle frequenze considerate
Ad esempio, il rumore1/f avra la stessa potenza nell’intervallo da 40 a 60 Hz co-me nell’intervallo da 4000 a 6000 Hz. La densita spettrale di potenza, paragonataa quella del rumore bianco, diminuisce di 20 dB/dec.
• E proporzionale all’ampiezza della corrente continua nei dispositivi, per cui, se lacorrentee sufficientemente bassa, prevarra il rumore termico.
30

Burst noise
Il burst noisedetto ancherumore popcorne legato alle imperfezioni dei semiconduttori,ed e caratterizzato da impulsi ad alta frequenza di tipo discreto. Sembra essere dovutoalla contaminazione del semiconduttore da parte dei metalli pesanti e alle condizioni nonperfette sulla superficie dei semiconduttori durante i processi tecnologici sul wafer.
Non approfondiremo oltre le caratteristiche di questo tipo di rumore per ragioni dispazio.
Avalanche noise
Questo tipo di rumore, chiamato ancheeffetto valanga, si presenta in giunzioni pn cheoperano nella zona di breakdown; la generazione per effetto valanga di coppie elettroni-lacunee casuale e si manifesta con impulsi di corrente attraverso la giunzione inversa.
Non approfondiremo oltre le caratteristiche di questo tipo di rumore per ragioni dispazio.
Colore dei rumori
Il rumore viene spesso descritto associandogli un colore: avremo percio il rumore bian-co, il rumore rosa, e in generale unrumore colorato, a seconda della PSD associata, cheha le caratteristiche riassunte in Tabella
Colore PSDPorpora (purple noise) f2
Blu (blue noise) f
Bianco (white noise) 1Rosa (pink noise) 1/f
Rosso/marrone (red/brown noise) 1/f2
Rumore bianco.E il rumore caratterizzato da una PSD costante a tutte le frequenze. La potenzadel segnale per una banda centrata inf0 non varia al variare dif0. Il nome derivaper analogia dalla luce bianca chee la somma di componenti di tutte le frequenzeelettromagnetiche (nel visibile).
Lo shot noise e il rumore termico sono approssimativamente modellabili comerumori bianchi, anche se, come detto, non esistono in natura fenomeni di perfettorumore bianco; ad alta frequenza il rumore bianco tende sempre a diventare rosa.
31
./Figure/Colored_noise.eps
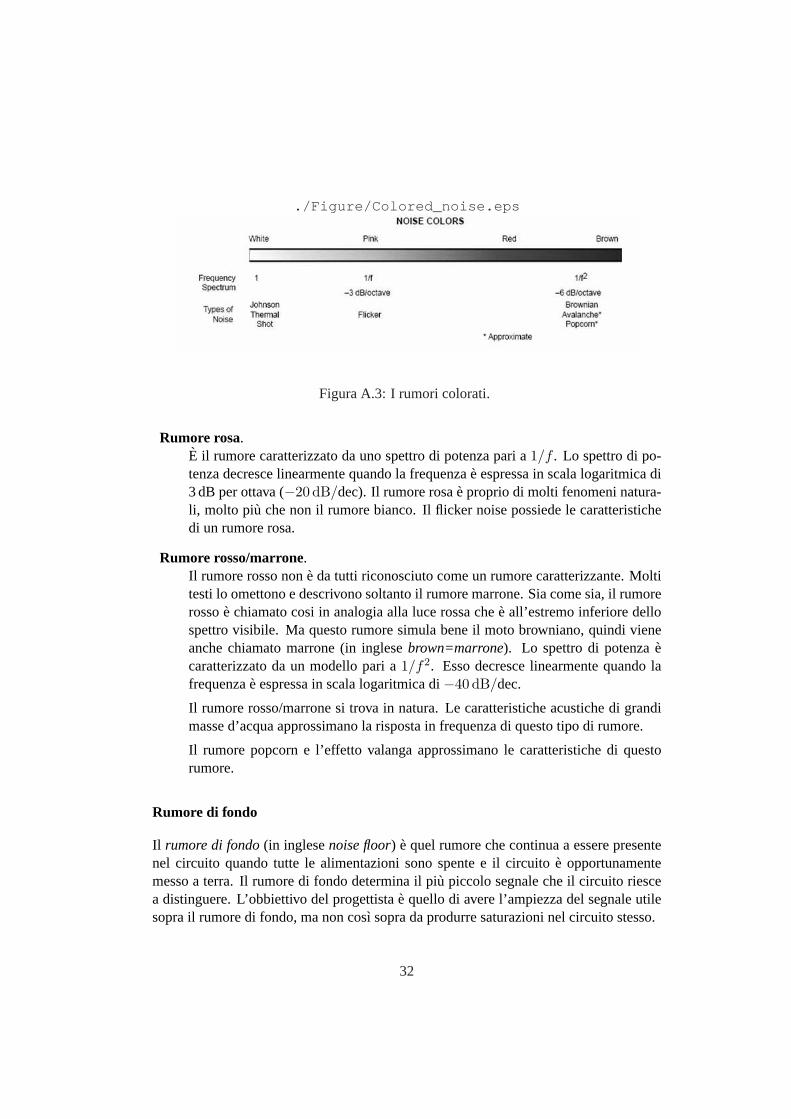
Figura A.3:I rumori colorati.
Rumore rosa.E il rumore caratterizzato da uno spettro di potenza pari a1/f . Lo spettro di po-tenza decresce linearmente quando la frequenzae espressa in scala logaritmica di3 dB per ottava (−20 dB/dec). Il rumore rosae proprio di molti fenomeni natura-li, molto piu che non il rumore bianco. Il flicker noise possiede le caratteristichedi un rumore rosa.
Rumore rosso/marrone.Il rumore rosso none da tutti riconosciuto come un rumore caratterizzante. Moltitesti lo omettono e descrivono soltanto il rumore marrone. Sia come sia, il rumorerossoe chiamato cosi in analogia alla luce rossa chee all’estremo inferiore dellospettro visibile. Ma questo rumore simula bene il moto browniano, quindi vieneanche chiamato marrone (in inglesebrown=marrone). Lo spettro di potenzaecaratterizzato da un modello pari a1/f2. Esso decresce linearmente quando lafrequenzae espressa in scala logaritmica di−40 dB/dec.
Il rumore rosso/marrone si trova in natura. Le caratteristiche acustiche di grandimasse d’acqua approssimano la risposta in frequenza di questo tipo di rumore.
Il rumore popcorn e l’effetto valanga approssimano le caratteristiche di questorumore.
Rumore di fondo
Il rumore di fondo(in inglesenoise floor) e quel rumore che continua a essere presentenel circuito quando tutte le alimentazioni sono spente e il circuitoe opportunamentemesso a terra. Il rumore di fondo determina il piu piccolo segnale che il circuito riescea distinguere. L’obbiettivo del progettistae quello di avere l’ampiezza del segnale utilesopra il rumore di fondo, ma non cosı sopra da produrre saturazioni nel circuito stesso.
32

Nella teoria dei segnali, il rumore di fondo fornisce una misura della somma di tuttele sorgenti di rumore che agiscono in modo indesiderato sul sensore. In elettronica enelle telecomunicazioni, questo rumore di fondo puo includere il rumore termico e illa radiazione di corpo nero, e qualsiasi altro segnale di interferenza. Ad esempio, inun sismografo, il rumore di fondo puo includere il traffico pedonale o automobilisticointorno al laboratorio.
Un modo abbastanza comune di abbassare il rumore di fondo in un’apparecchiatu-ra e quello di diminuirne la temperatura di funzionamento, perche spesso la maggiorcomponente del rumore di fondoe il rumore termico.
Rapporto segnale–rumore
Per misurare le prestazioni di un sensore, si usa un parametroSn chiamatorapportosegnale–rumore(in inglesesignal to noise ratio); questo none altro che
Sn =valore efficace segnalevalore efficace rumore
=vrms
nrms
il rapporto segnale rumore si misura spesso indB.
A.2.4 Esempi
Esempio 2. Rumore bianco con distribuzione uniformeda terminareFiguraA.4
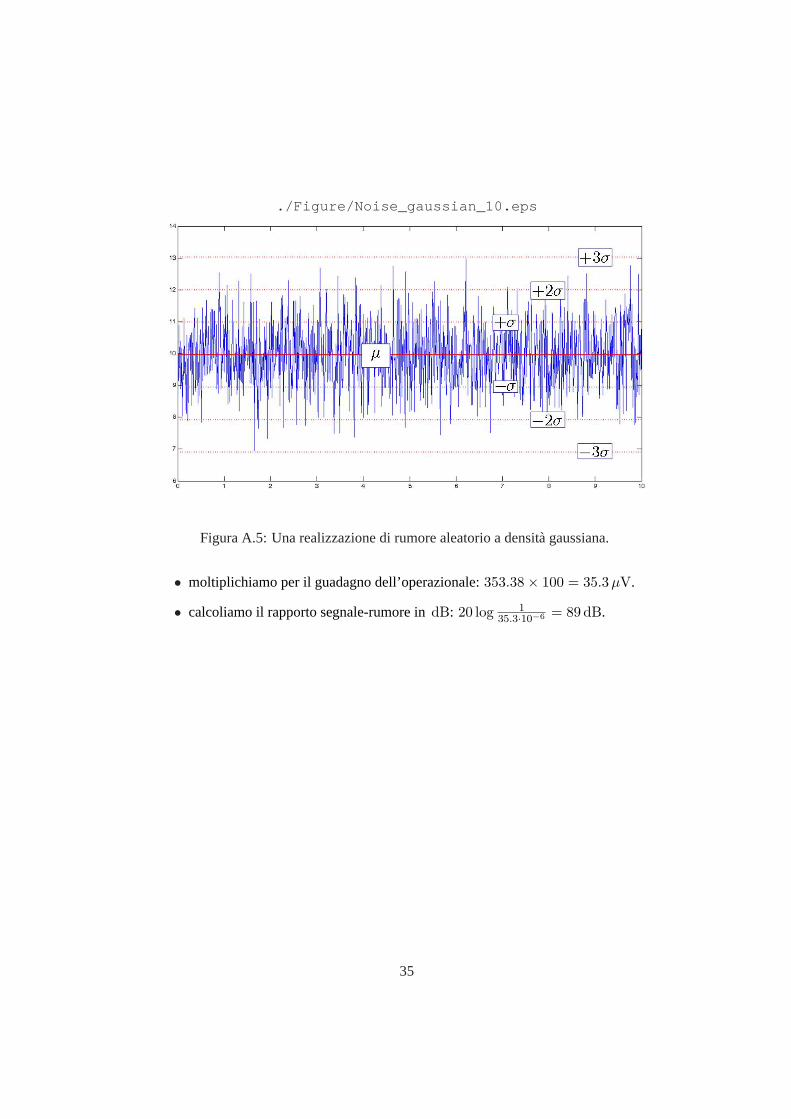
Esempio 3. Rumore bianco con distribuzione gaussianada fareLa FiguraA.5 riporta 1000 campioniw(k) ricavati da una simulazione di un rumorebianco a distribuzione uniforme e valor medio nullo, sommato ad una costante notaµ:
w(k) = e(k) + µ
dovee(k) ∈ Wgaussian, con valore attesoµ = 10, varianzaσ2 = 1, eµ = 10.
La simulazionee stata effettuata impostando un tempo di campionamento pari aT =1 · 10−3 s (fc = 1 kHz); sono stati raccolti 1000 campioni.
La realizzazione (a posteriori), riportata in FiguraA.5 possiede un valor medio pari aµ = 9.96, abbastanza prossimo al valore attesoµ = 10; la varianza campionaria valeσ2 = 1.02, anch’essa abbastanza prossima a quella teorica.
In FiguraA.5 sono anche indicati i limiti±σ,±2σ,±3σ.
E stato anche calcolata la PSD unilatera daf = 0 Hz a f = fc/2 = 500Hz, che vieneriportata in FiguraA.6. Nel riquadroe mostrato l’andamento teorico nel caso di PSDunilatera.
33
./Figure/Noise_uniform_10.eps
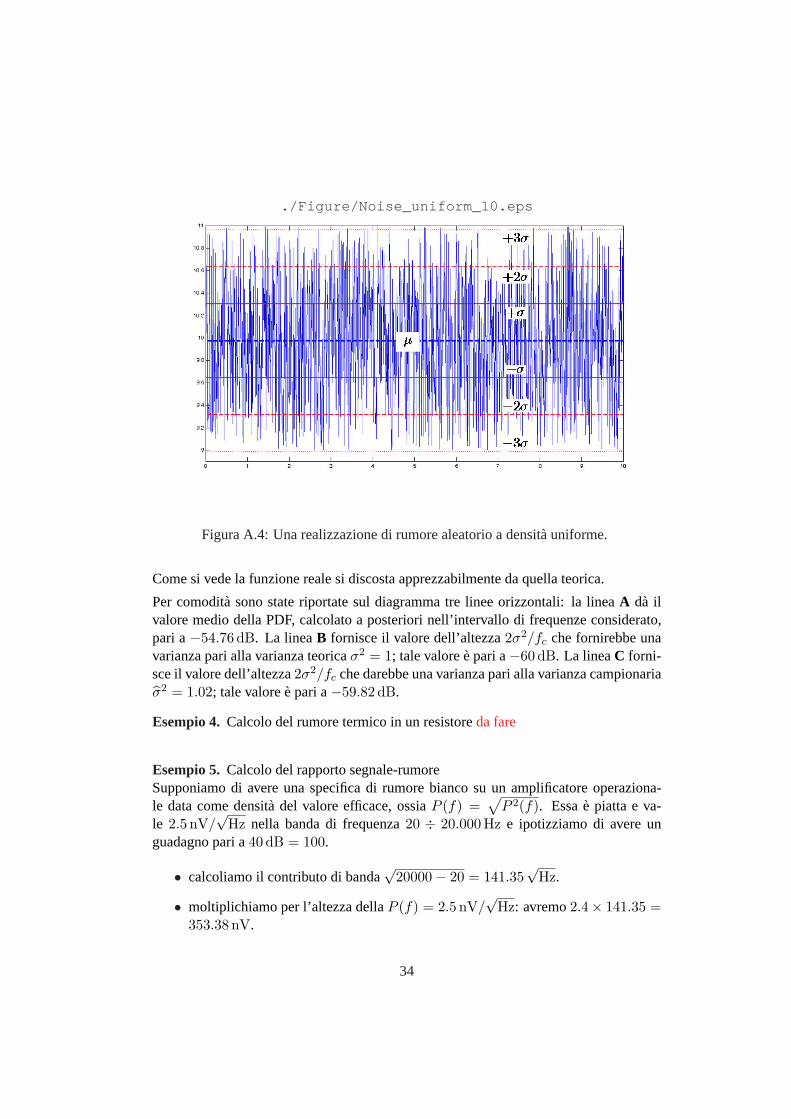
Figura A.4:Una realizzazione di rumore aleatorio a densita uniforme.
Come si vede la funzione reale si discosta apprezzabilmente da quella teorica.
Per comodita sono state riportate sul diagramma tre linee orizzontali: la lineaA da ilvalore medio della PDF, calcolato a posteriori nell’intervallo di frequenze considerato,pari a−54.76 dB. La lineaB fornisce il valore dell’altezza2σ2/fc che fornirebbe unavarianza pari alla varianza teoricaσ2 = 1; tale valoree pari a−60 dB. La lineaC forni-sce il valore dell’altezza2σ2/fc che darebbe una varianza pari alla varianza campionariaσ2 = 1.02; tale valoree pari a−59.82 dB.
Esempio 4. Calcolo del rumore termico in un resistoreda fare
Esempio 5. Calcolo del rapporto segnale-rumoreSupponiamo di avere una specifica di rumore bianco su un amplificatore operaziona-le data come densita del valore efficace, ossiaP (f) =
√P 2(f). Essae piatta e va-
le 2.5 nV/√
Hz nella banda di frequenza20 ÷ 20.000Hz e ipotizziamo di avere unguadagno pari a40 dB = 100.
• calcoliamo il contributo di banda√
20000− 20 = 141.35√
Hz.
• moltiplichiamo per l’altezza dellaP (f) = 2.5 nV/√
Hz: avremo2.4× 141.35 =353.38 nV.
34
./Figure/Noise_gaussian_10.eps
Figura A.5:Una realizzazione di rumore aleatorio a densita gaussiana.
• moltiplichiamo per il guadagno dell’operazionale:353.38× 100 = 35.3µV.
• calcoliamo il rapporto segnale-rumore indB: 20 log 135.3·10−6 = 89 dB.
35
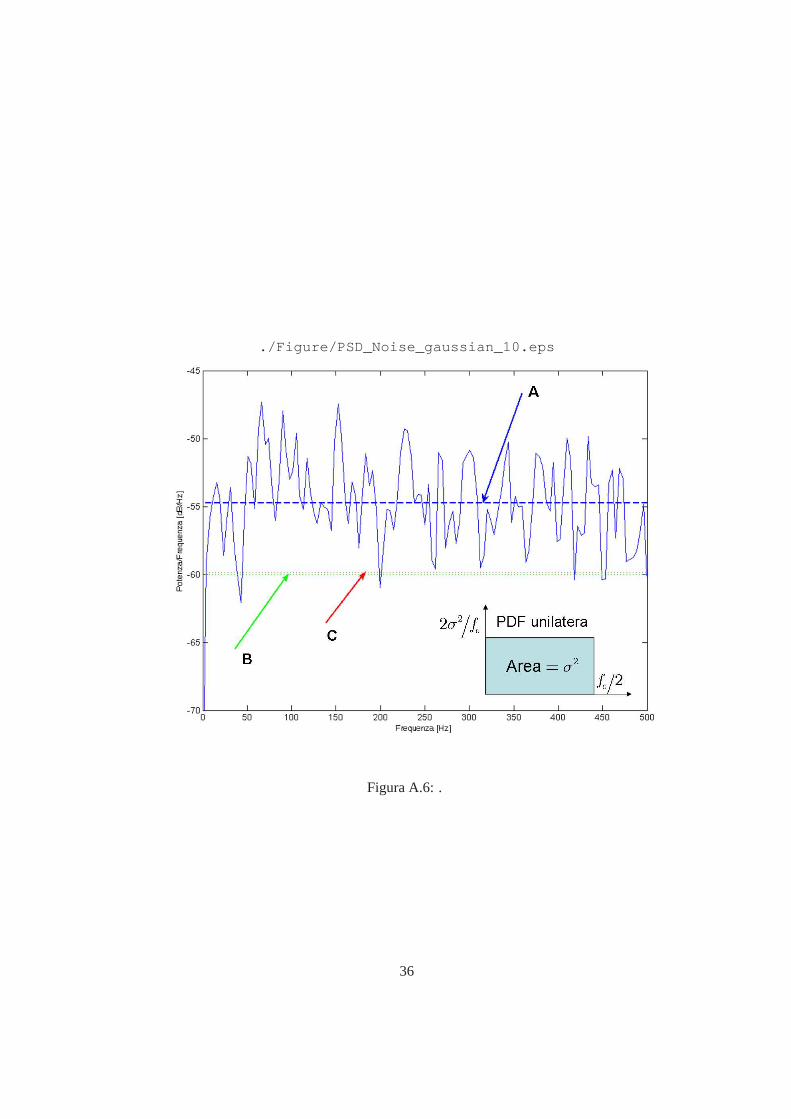
./Figure/PSD_Noise_gaussian_10.eps
Figura A.6:.
36
Bibliografia
[1] G. Calafiore,Elementi di Automatica, CLUT, 2004.
[2] A. Papoulis,Probability, Random Variables, and Stochastic Processes, McGraw-hill, 1965.
37