Embed Size (px)
Citation preview

Sensors - 1
Intro to Sensors
Sensors - 2
Physical Principles of SensingGeneration of electrical signals in response to nonelectrical influences
• Electric Charges, Fields and Potentials• Magnetism• Induction• Resistance• Piezoelectric Effect• Pyroelectric Effect• Hall Effect• Seebeck and Peltier Effects• Mechanical Measurements• Sound Waves• Optical Properties of Material
Sensors - 3
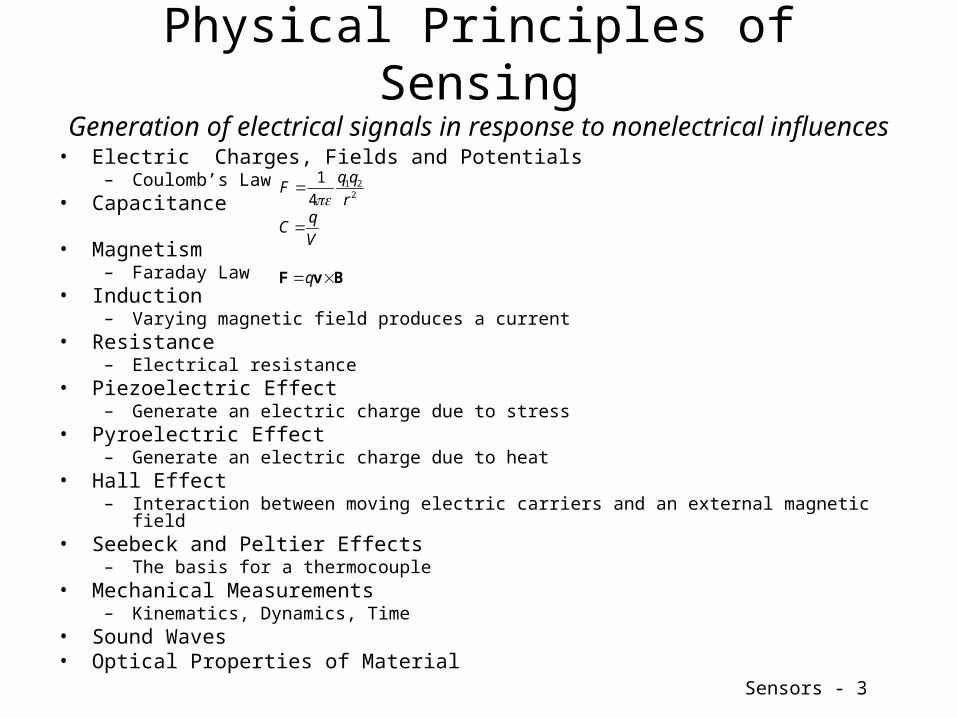
Physical Principles of SensingGeneration of electrical signals in response to nonelectrical influences
• Electric Charges, Fields and Potentials– Coulomb’s Law
• Capacitance
• Magnetism– Faraday Law
• Induction– Varying magnetic field produces a current
• Resistance– Electrical resistance
• Piezoelectric Effect– Generate an electric charge due to stress
• Pyroelectric Effect– Generate an electric charge due to heat
• Hall Effect– Interaction between moving electric carriers and an external magnetic field
• Seebeck and Peltier Effects– The basis for a thermocouple
• Mechanical Measurements– Kinematics, Dynamics, Time
• Sound Waves• Optical Properties of Material
qC
V
1 22
1
4
q qF
r
q F v B
Sensors - 4
Resistive Sensors
• Potentiometers– Symbol:
• Strain Gauges (Piezoresistive Effect)• Resistive Temperature Detectors
– Metals (Linear, positive temperature coefficient)– Symbol:
• Thermistors– Semiconductors (non-linear, negative temp coef)– Symbol:
+tº
-tº

Sensors - 5
Resistive Sensors
• Light-Dependent Resistors– Symbol:
Cadmium Sulfide Photoresistor
How would you:1.increase reaction time?2.increase sensitivity?

Sensors - 6
Packaging

Sensors - 7
Signal Conditioning for Resistive Sensors
• Voltage Divider
• Differential Amplifiers
• Instrumentation Amplifiers
+ v–
R1
R2v2
Sensors - 8
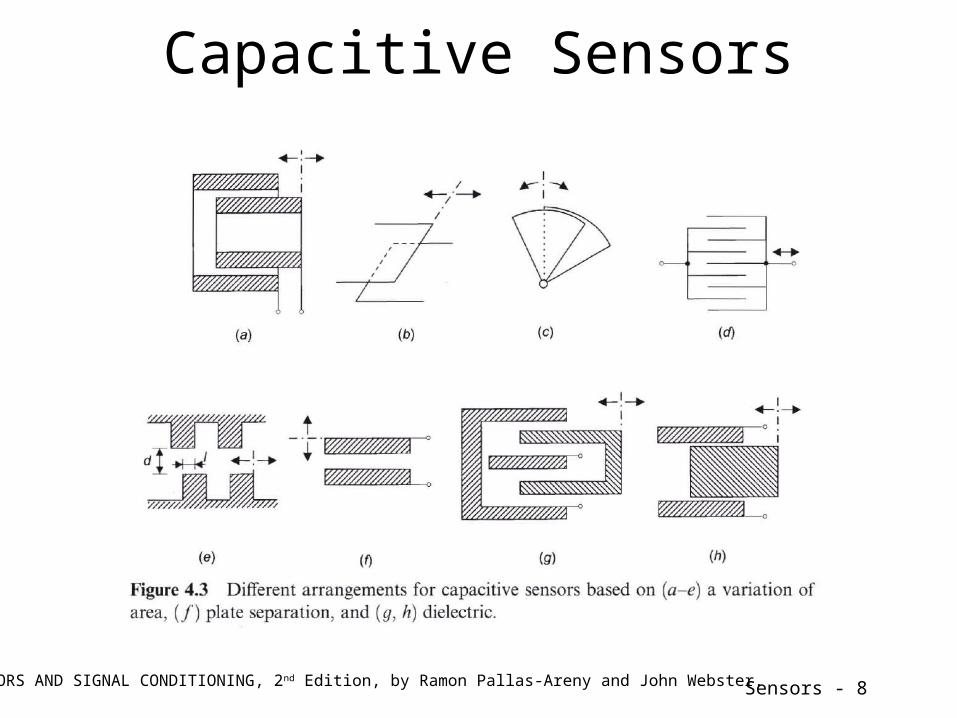
Capacitive Sensors
SENSORS AND SIGNAL CONDITIONING, 2nd Edition, by Ramon Pallas-Areny and John Webster.
Sensors - 9
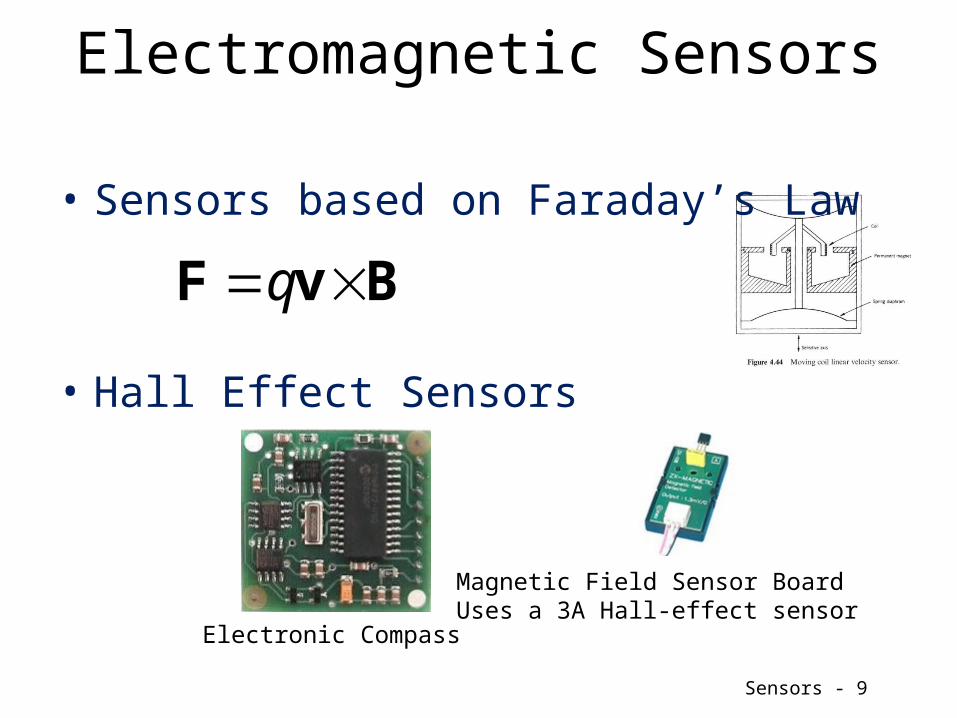
Electromagnetic Sensors
• Sensors based on Faraday’s Law
• Hall Effect Sensors
q F v B
Electronic Compass
Magnetic Field Sensor Board Uses a 3A Hall-effect sensor
Sensors - 10
Piezo Gyro
Piezoelectric Sensors
• Appearance of electric polarization in a material that strains under stress, and vice versa.
• No DC component (a constant stress initially generates a charge that slowly dissipates)
Accelerometer

Sensors - 11
Pyroelectric Sensors
• Change in temperature causes a change in electric charge
• Fast (thin with high sensitivity)
• Incident radiation must be modulated due to parasitic charges that may neutralize the surface charge induced

Sensors - 12
Distance Sensors
• IR Distance Sensor
• Sonar
IR Distance Sensor
Hagisonic StarGazer Robot Localization System
Sensors - 13
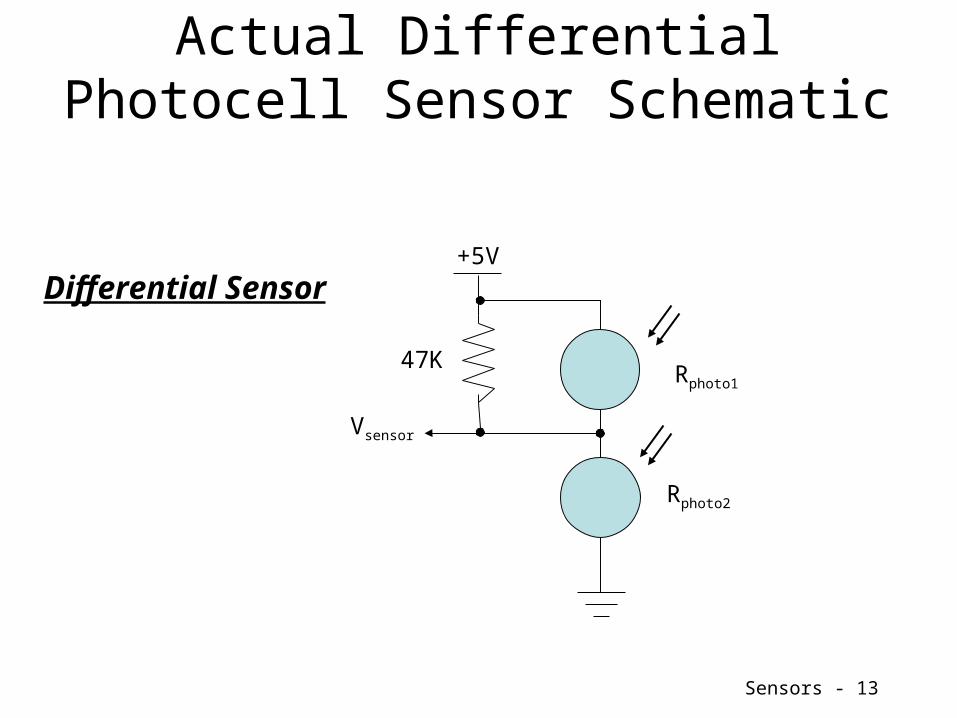
Actual Differential Photocell Sensor Schematic
Differential Sensor+5V
Rphoto1
Rphoto2
Vsensor
47K

Sensors - 14
Statistical Considerations• How many times do you need to sample a
sensor?
– Mean ()
• What is the error?– Variance (2)– Standard Deviation ()
• Problem: definition of requires us to know the distribution’s mean, , not the approximation
i
ixNx
1
22 )(1
iixN
x

Sensors - 15
Statistical Considerations
• Thought:– Expect
• Consider Degrees of Freedom and redefine:
22 x
22 )(1
1xx
N iix

Sensors - 16
Cd Sensor Homework
0
255
-90 90Angle
Analog ReadoutHandyboard
Sensors - 17
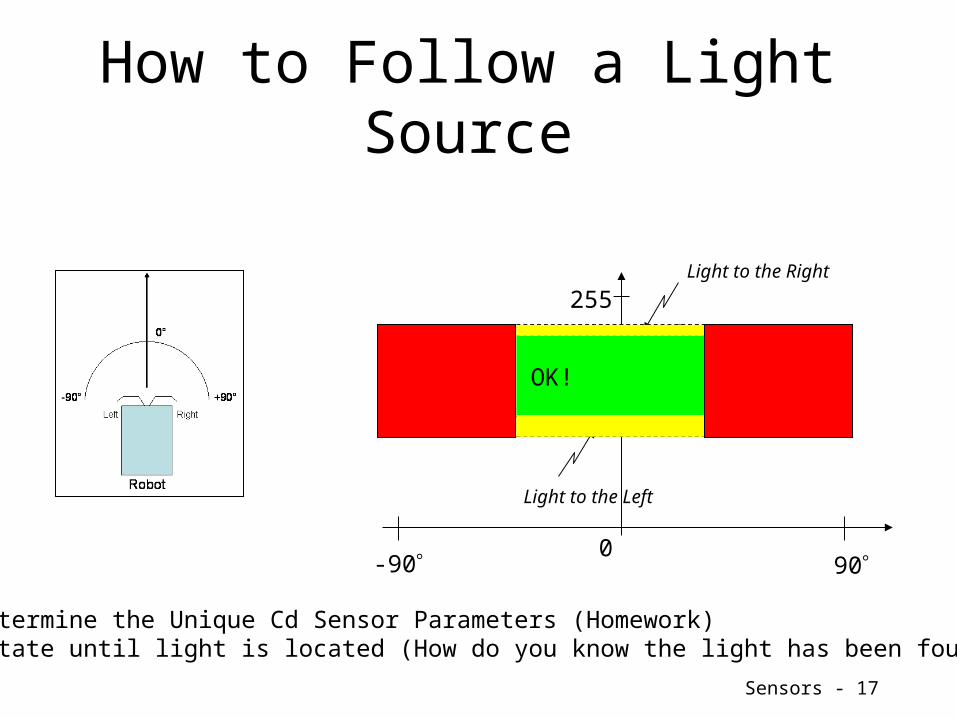
0
255
-90 90
Light to the Right
Light to the Left
AmbiguousRegion
AmbiguousRegion
OK!
How to Follow a Light Source
1. Determine the Unique Cd Sensor Parameters (Homework)2. Rotate until light is located (How do you know the light has been found?)

Sensors - 18
What would you select for:•Upper limit•Lower limit

Sensors - 19
What would you select for:•Upper limit•Lower limit
Sensors - 20
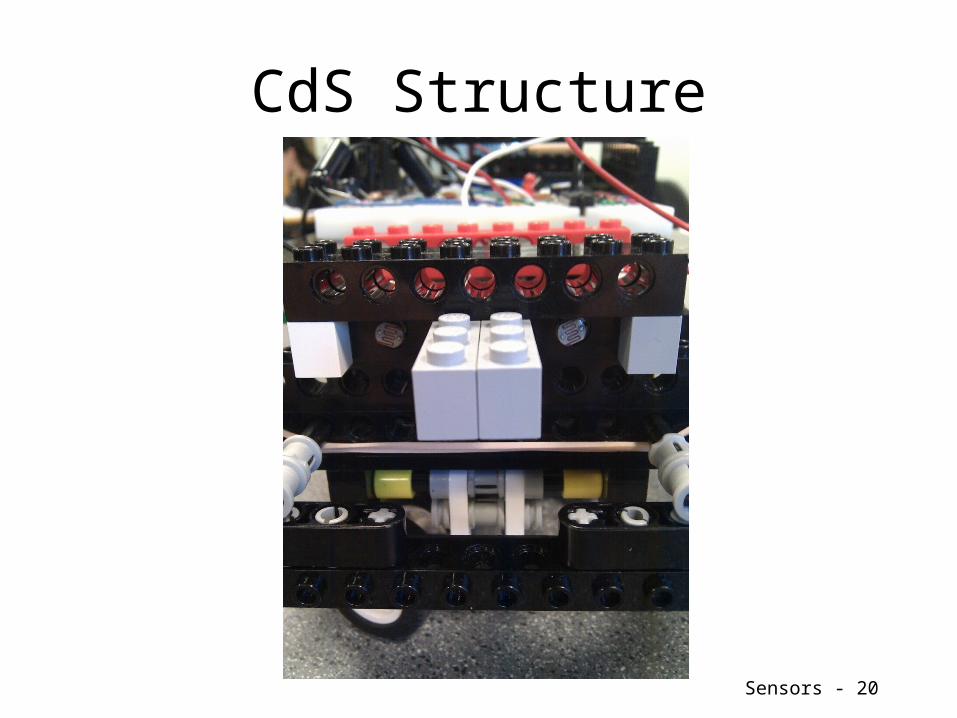
CdS Structure

Sensors - 21
The Search Behavior
Exploring the use of PID Controllers

Sensors - 22
0
1023
-90 90
Light to the Right
Light to the Left
AmbiguousRegion
AmbiguousRegion
OK!
CdS Homework / Lab
Homework : Determine the thresholds for each region
Lab: Program the robot to follow the light!
Sensors - 23
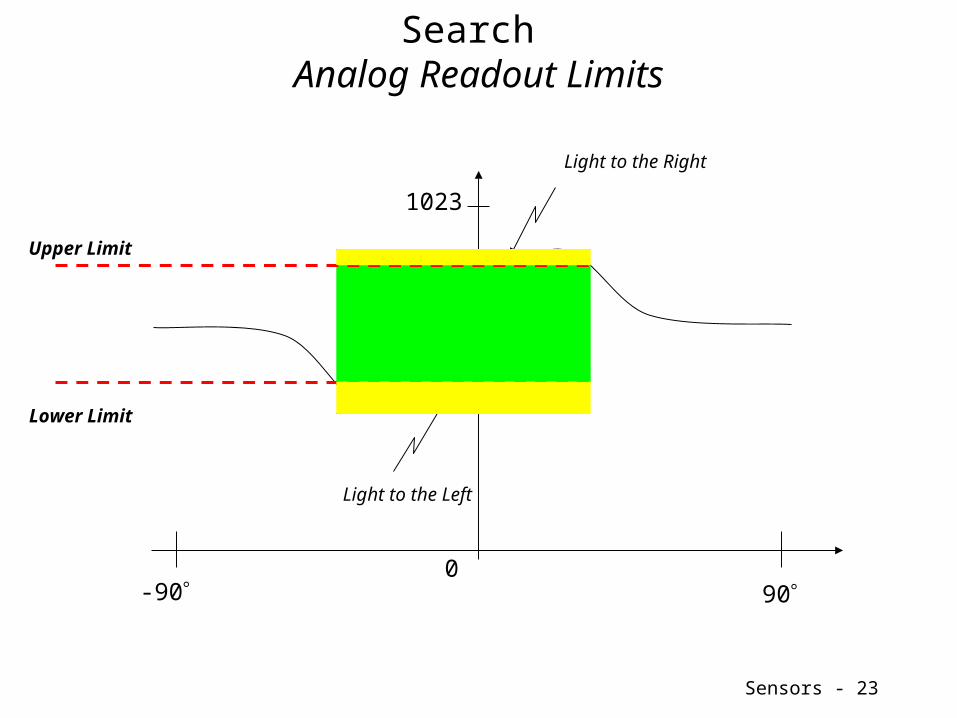
0
1023
-90 90
Light to the Right
Light to the Left
Search Analog Readout Limits
Upper Limit
Lower Limit

Sensors - 24
0
1023
-90 90
Light to the Right
Light to the Left
Search Reduced Limits → Reduced Oscillations?
Upper Limit
Lower Limit

Sensors - 25
0
1023
-90 90
Light to the Right
Light to the Left
Search The Limit
Setpoint Limit
Sensors - 26
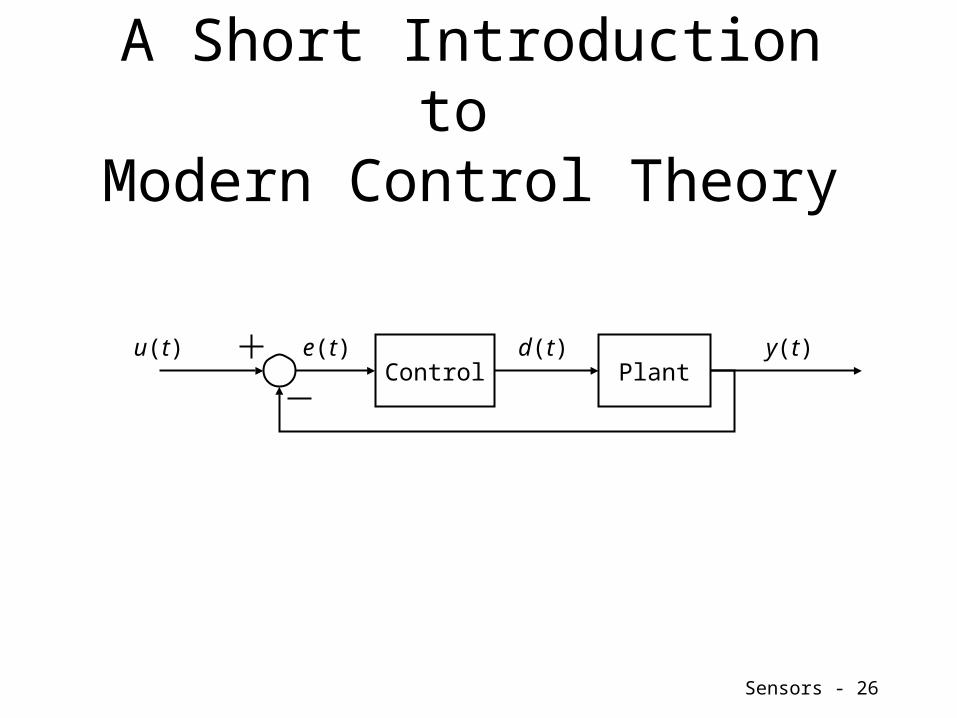
A Short Introduction to Modern Control Theory
Control Plantu(t) e(t) d(t) y(t)

Sensors - 27
1023
Light to the Right
Light to the Left
Search LabUsing a PD Controller
Setpoint LimitMake the speed of the turns proportional
to the distance from the setpoint
power = reading - setpoint
0
When is power negative?When is it positive?
How would you implement this in your Search code?
Sensors - 28
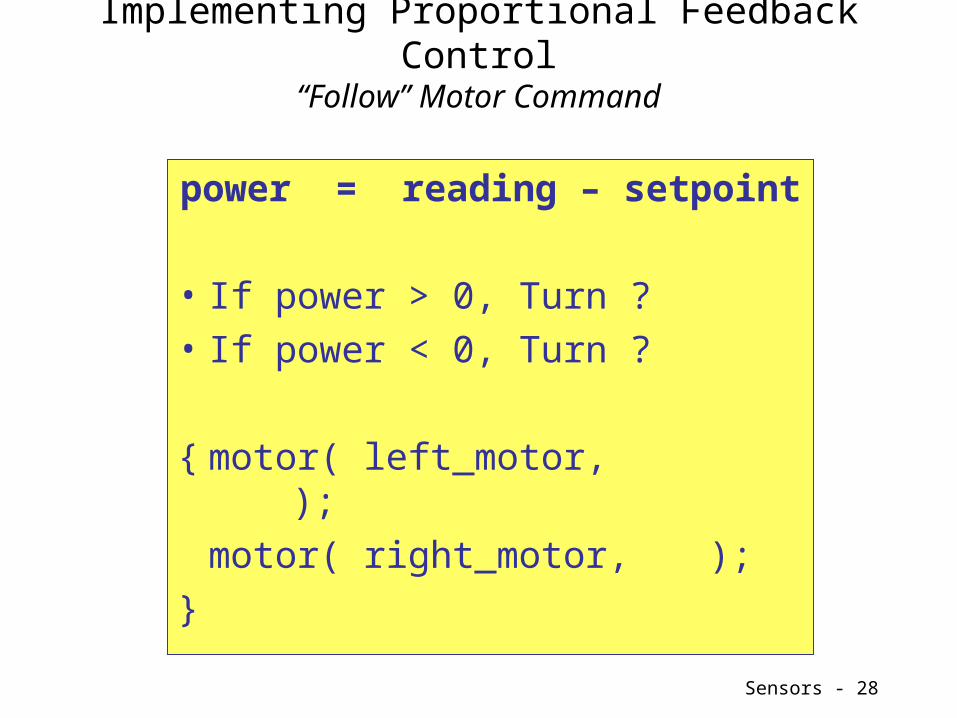
Implementing Proportional Feedback Control“Follow” Motor Command
power = reading – setpoint
• If power > 0, Turn ?• If power < 0, Turn ?
{ motor( left_motor, );
motor( right_motor, );
}

Sensors - 29
Proportional FeedbackHow to increase the speed of the correction?
power = pgain*(reading – setpoint)

Sensors - 30
Proportional FeedbackHow to increase the speed of the correction?
power = pgain*(reading – setpoint)
Problem:Instability – can begin oscillating with ever increasing amplitude

Sensors - 31
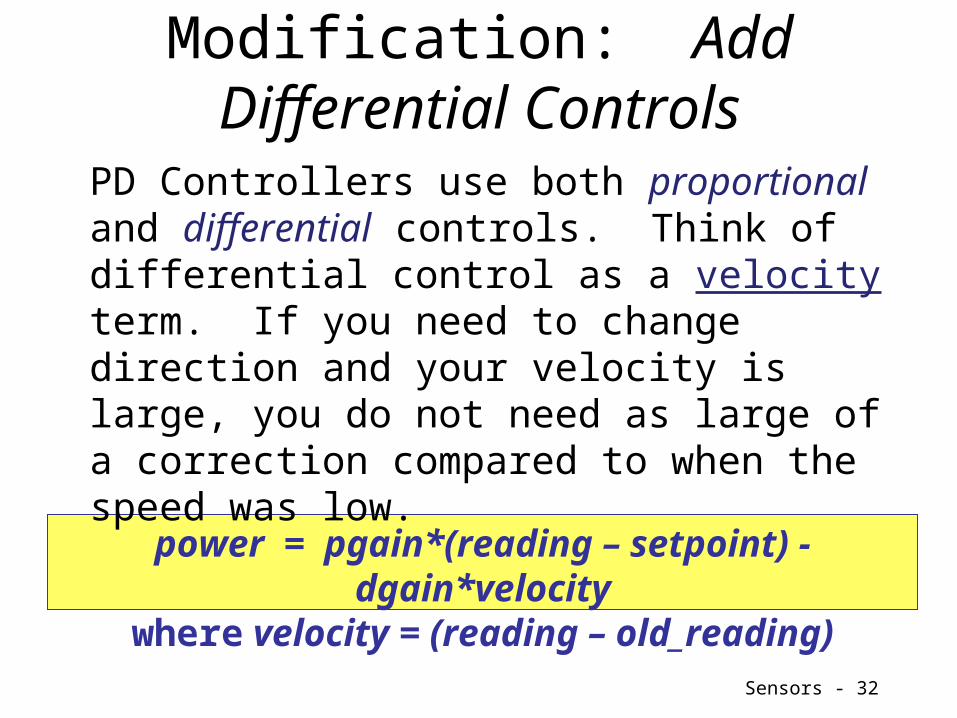
Modification: Add Differential Controls
PD Controllers use both proportional and differential controls. Think of differential control as a velocity term. If you need to change direction and your velocity is large, you do not need as large of a correction compared to when the speed was low.
Sensors - 32
Modification: Add Differential Controls
power = pgain*(reading – setpoint) - dgain*velocity
where velocity = (reading – old_reading)
PD Controllers use both proportional and differential controls. Think of differential control as a velocity term. If you need to change direction and your velocity is large, you do not need as large of a correction compared to when the speed was low.
Sensors - 33
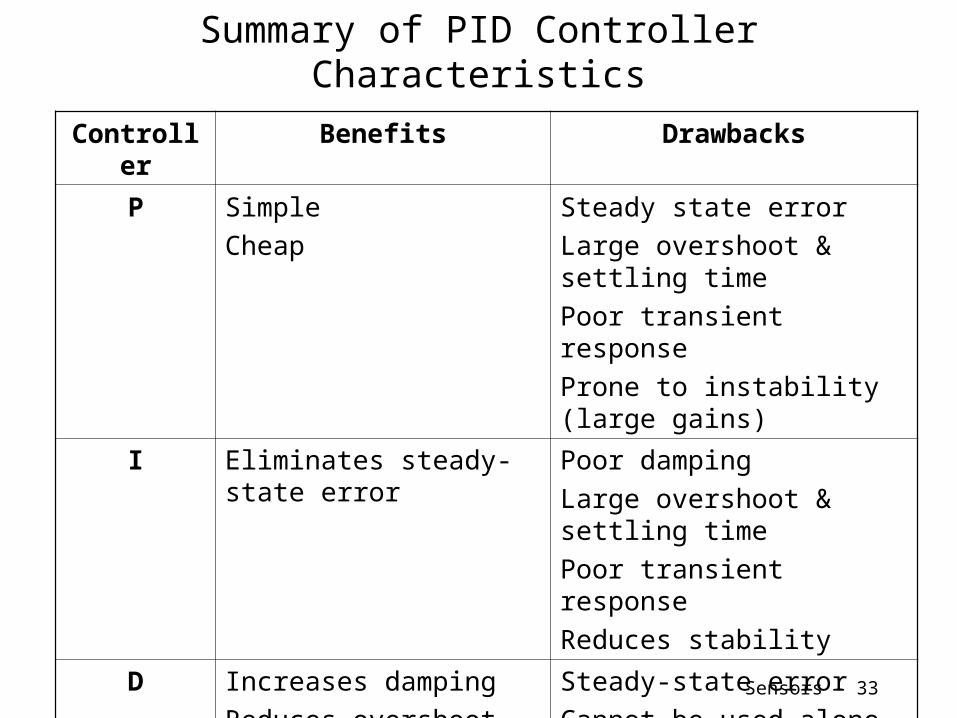
Summary of PID Controller Characteristics
Controller Benefits Drawbacks
P Simple
Cheap
Steady state error
Large overshoot & settling time
Poor transient response
Prone to instability (large gains)
I Eliminates steady-state error Poor damping
Large overshoot & settling time
Poor transient response
Reduces stability
D Increases damping
Reduces overshoot
Reduces settling time
Improved transients
Improves stability
Steady-state error
Cannot be used alone
Sensors - 34
Lab Report
Be sure to contrast and compare how the robot performs using:
– Thresholds (e.g., no controller)– Proportional Controller – Proportional-Differential Controller
PS Bring a Bright light with a Wide beam(12V flashlight if available!)