Embed Size (px)
Citation preview

3 March 2008
Service Discovery and Composition in Body Area NetworksMatteo Coloberti, Clemens Lombriser, Daniel Roggen, Gerhard Tröster, Renata Guarneri, Daniele Riboni
Clemens Lombriser <[email protected]>

25 February 2008 Clemens Lombriser <[email protected]> 2
Motivation
Activity recognition in Body Area Networks from sensors worn on the body and on tools usedAdaptation to environment without reprogrammingAlgorithm updates from outside
Service discovery and composition enables this
25 February 2008 Clemens Lombriser <[email protected]> 3
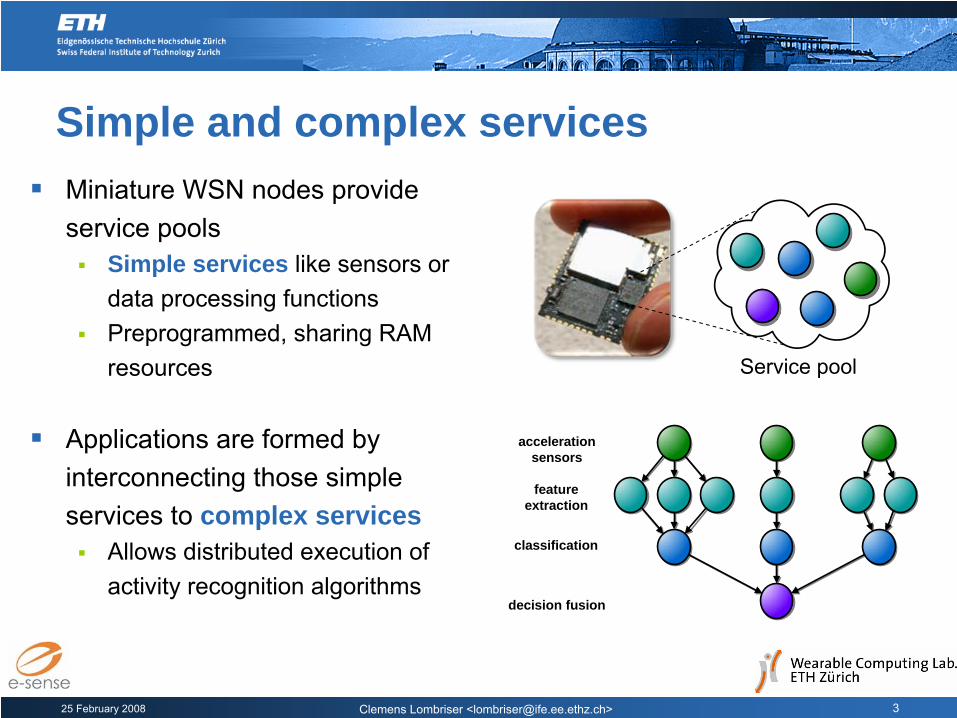
Simple and complex servicesMiniature WSN nodes provide service pools
Simple services like sensors or data processing functionsPreprogrammed, sharing RAM resources
Applications are formed by interconnecting those simple services to complex services
Allows distributed execution of activity recognition algorithms
accelerationsensors
feature extraction
classification
decision fusion
Service pool

25 February 2008 Clemens Lombriser <[email protected]> 4
Simple service discoveryThe WSN is clustered according to connectivity time
Stable processing baseClusterhead keeps service directoryfor the service cluster
Service directories interconnect to form a service backbone
Allows instantiating services not available inside the own cluster
Extended over a gateway to the Task Graph Database (TGD)
Gateway
Task Graph Database

25 February 2008 Clemens Lombriser <[email protected]> 5
Complex Service DiscoveryThe Task Graph Database
A database for complex servicesFor various applicationsFor different requirements (QoS, environment)
Advertises possible complex servicesReceives updates on available WSN functionalityKeeps track of different possible servicesEasy addition of new complex services

25 February 2008 Clemens Lombriser <[email protected]> 6
Communication Service clusters sends service registration and deregistration messages to the TGD
Only updates on changes in the availability
The TGD sends advertisment and removalmessages to the service clusters
Service cluster can choose to download the description of the complex services

25 February 2008 Clemens Lombriser <[email protected]> 7
Complex Service Agent
Every complex service availability is handled by an agentIt keeps an Finite State Machine for every service neededUpdates the state on reception of messages from the WSNPublishes service when all services are available
PUBLISH

25 February 2008 Clemens Lombriser <[email protected]> 8
TGD ArchitectureMulti-agent structure following a congregation modelEach agent as producer-consumer
Consumes other service publish announcementsProduces own service publish announcements
Publication messages produced by agents may be consumed by other agents
Complex services containing other complex services are possible
Agent 1 Agent 2 Agent n
TGD Gateway

25 February 2008 Clemens Lombriser <[email protected]>
EvaluationSimulation
Reference Point Group Mobility Model (RPGM)100 runs with 50 nodes in 10 clusters3 – 20 simple services per node40 complex services to be detected
Results92% of the complex services foundwithin first 60 simulation secondsLimited by the clustering algorithmFast execution
9

25 February 2008 Clemens Lombriser <[email protected]> 10
Conclusion
Activity recognition in Body Area Networks
Two layered architecture for service discovery and composition
Clustering for adaptation to dynamics of BAN
Light-weight architecture (no semantics)
Efficiently detects complex services to download

25 February 2008 Clemens Lombriser <[email protected]> 11
Further work
A language for complex servicesDescribing different options of implementation, i.e. QoS, resources needed, or similar
Modeling the sensor networkImportant parameters for service distributionResources for the execution of complex services

25 February 2008 Clemens Lombriser <[email protected]> 13
EvaluationSimulation based on Reference Point Group Mobility (RPGM)
Group movement with random target within the simulation area, random movement within the group perimeter of each group member50 nodes in groups with average of 5 nodes, 100 simulations
Service distributionComplex service composed of 3 to 20 servicesRandom simple service distribution
25 February 2008 Clemens Lombriser <[email protected]> 14
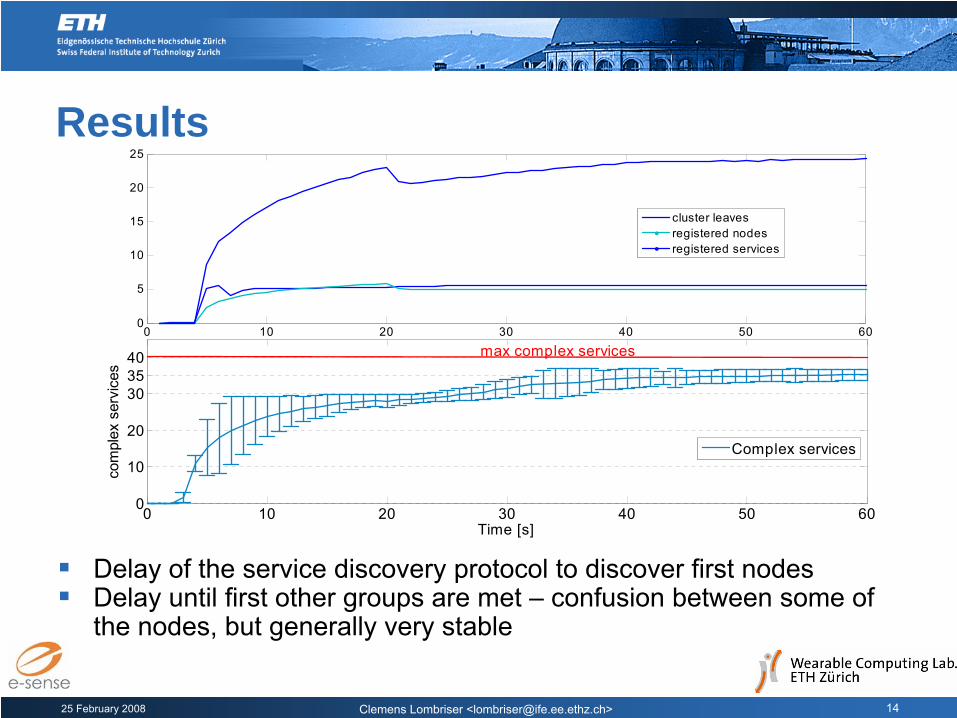
Results
Delay of the service discovery protocol to discover first nodesDelay until first other groups are met – confusion between some of the nodes, but generally very stable
0 10 20 30 40 50 600
5
10
15
20
25
Time [s]
cluster leavesregistered nodesregistered services
0 10 20 30 40 50 600
10
20
303540
Time [s]
com
plex
ser
vice
s
Complex services
max complex services

25 February 2008 Clemens Lombriser <[email protected]>
Results
About 25 simple services per cluster
Each service available 3.2 times in the whole network
After 60 seconds, 92% (σ=1.5) of all complex services discovered
15

















![Intelligent Portrait Composition Assistancefuf111/publications/intelligent... · 2017-07-02 · Image Re-Composition: Auto-composition or re-composition systems [3, 4] can passively](https://img.pdfslide.net/doc/110x75/5f6f6a9878decf302e3a6429/intelligent-portrait-composition-fuf111publicationsintelligent-2017-07-02.jpg)