Embed Size (px)
Citation preview
1/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
MESTRADO INTEGRADO DE ENGENHARIA CIVIL
Disciplina: TRANSPORTES
Prof. Responsável: José Manuel Viegas
Sessão 9:
O Modelo de 4 passos (2ª parte):
Escolha Modal e Afectação de Tráfego;
Crítica Geral do modelo 2011 / 2012
2/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de Escolha Modal A Escolha Modal é normalmente feita por recurso a modelos de escolha discreta
(já apresentados na sessão 6), havendo que ter alguns cuidados especiais:
A primeira coisa a fazer para cada par O/D é estabelecer o conjunto de modos
disponíveis para essa ligação (conjunto de escolha). Quando as distâncias são
curtas não devemos esquecer a marcha a pé
Se possível, deve-se começar por separar a matriz O/D global (resultante do 2º
passo) em duas, uma relativa aos viajantes que têm todas as escolhas, e outra
aos utentes cativos do TC ou a pé (de facto, os utentes sem acesso ao TI). Os
conjuntos de escolha nestas duas matrizes são naturalmente diferentes
Serão também provavelmente diferentes as preferências e portanto as suas
funções utilidade, na medida em que estes grupos sociais são diferente
importância ao tempo de viagem e de espera, ao conforto (densidade a bordo),
aos preços, etc
Embora os conjuntos de escolha possam ser diferentes para cada para O/D, a
calibração deste modelo deve ser feita para o conjunto de todos os pares
O/D (em duas operações ou só numa, consoante se tenha feita a separação de
viajantes acima referida)
3/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (I)
No passo de afectação de tráfego são já conhecidos os fluxos de viajantes
em cada um dos modos entre cada par de zonas, havendo agora que estimar
como se repartem esses viajantes pelos vários caminhos possíveis (para
cada modo e par de zonas).
À partida poderia apontar-se para usar também neste passo um modelo de
escolha discreta como o do passo anterior, em que agora cada alternativa
corresponde a um caminho.
Isso não deve ser feito quando se está perante redes congestionadas,
porque os atributos de cada caminho (nomeadamente o seu tempo de
viagem) dependem de quantos viajantes escolhem esse caminho.
Vários algoritmos têm sido propostos, com diferentes sofisticações e campos de
aplicação
Estocástico Equilíbrio
Sem auto-correcção de velocidades Com auto-correcção de velocidades
Tudo ou Nada Incremental
4/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (II)
Em todos eles desempenha um papel central o algoritmo de
caminhos mínimos numa rede (cadeira de Investigação
Operacional), sendo necessário definir a montante qual a função
custo que se pretende minimizar ao longo desses caminhos.
O mais habitual é uma combinação linear de custo de operação
(baseada na distância) e tempo de percurso (convertido em
dinheiro, através do parâmetro obtido no Logit)) a que se soma a
portagem nos casos em que ela exista.
Para a escolha de caminhos nos modos de transporte colectivo, o
processo básico é o mesmo, mas o algoritmo de caminho mínimo é
muito mais complicado que no caso do transporte individual
5/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (III)
O algoritmo tudo-ou-nada tem esse nome porque afecta a totalidade das
viagens de cada par de zonas a um só caminho (o de custo mais baixo),
ficando portanto os outros caminhos com nada.
Os custos de cada arco da rede são determinados a priori, com base no tempo
médio que se gasta para o percorrer. Os resultados são muito errados quando
há outros caminhos de custo quase tão baixo como o de custo mínimo
O algoritmo estocástico também não considera os efeitos de
congestionamento, mas divide o fluxo de cada par O/D por vários
caminhos.
Para cada par, e baseado no tempo médio de percurso de cada arco, começa-
se por calcular um pequeno conjunto de caminhos bons (o mínimo e alguns
mais de custo próximo). Depois, aplica-se o modelo LOGIT para repartir o
fluxo por esses caminhos, tomando os custos antes estimados como utilidades
de cada um deles.
6/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (IV)
Estes algoritmos (tudo-ou-nada e estocástico) são muito fáceis de
programar mas têm o problema da modelação da situação futura, para o qual
não conseguimos saber a priori a velocidade habitual em cada arco, o que é
um input essencial para a sua aplicação
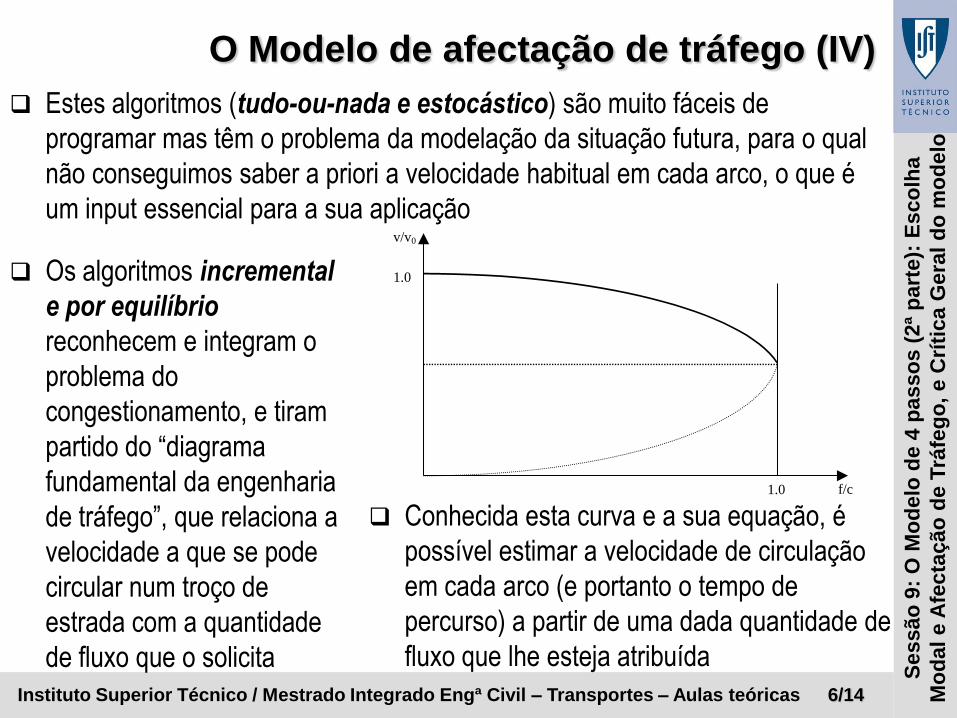
Os algoritmos incremental
e por equilíbrio
reconhecem e integram o
problema do
congestionamento, e tiram
partido do “diagrama
fundamental da engenharia
de tráfego”, que relaciona a
velocidade a que se pode
circular num troço de
estrada com a quantidade
de fluxo que o solicita
f/c1.0
v/v0
1.0
Conhecida esta curva e a sua equação, é
possível estimar a velocidade de circulação
em cada arco (e portanto o tempo de
percurso) a partir de uma dada quantidade de
fluxo que lhe esteja atribuída
7/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (V)
O algoritmo incremental começa por considerar toda a rede sem qualquer
tráfego, e vai dividir a matriz total de tráfego em “fatias” de dimensão
decrescente, cada uma delas correspondente a uma certa percentagem da
matriz total inicial (essa percentagem é aplicada a cada uma das casas da
matriz). Num processo a 6 fatias é habitual considerar dimensões de 50 / 25 /
15 / 6 / 3 / 1%.
Na primeira afectação, cada arco é considerado percorrido à sua velocidade “em
vazio”, sendo no final de cada afectação (para o conjunto de todos os pares O/D)
a velocidade de cada arco revista tendo em conta o tráfego que já lhe está
afectado.
Os volumes de tráfego resultantes de cada afectação são acumulados aos das
afectações anteriores. As fatias têm que ser de dimensões decrescentes porque
a curva de variação da velocidade tem um declive (negativo) fortemente
crescente à medida que nos aproximamos da capacidade do arco
É um algoritmo muito simples de programar a que dá resultados aceitáveis, mas
em redes muito saturadas, esses resultados podem ter diferenças significativas
em função do esquema de “fatiamento” considerado
8/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (VI)
O algoritmo de equilíbrio é mais complexo e tem uma fundamentação
teórica mais sólida, no chamado “2º princípio de Wardrop” (1952).
Este princípio diz que “numa rede de tráfego em que todos os utentes
tenham funções de utilidade iguais e disponham de informação idêntica, os
fluxos se repartem de tal forma que todos os caminhos usados por alguém
para a ligação entre dois pontos terão utilidades (custos) iguais”
A demonstração faz-se por redução ao absurdo:
se houvesse um caminho de custo menor que os outros, algum dos viajantes
de um desses outros caminhos viria experimentá-lo e passaria a adoptá-lo.
Com isso (vide diagrama fundamental), a velocidade nesse (seu novo)
caminho baixaria um pouco, e a velocidade no outro (seu antigo) caminho
aumentaria um pouco.
Se ainda não estiverem iguais haverá outro viajante que irá experimentar e
assim sucessivamente até que quem experimente conclua que afinal não valia
a pena porque os tempos de percurso eram idênticos nos dois caminhos
9/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (VII)
Algoritmo iterativo (BPR, 1964), para a afectação por equilíbrio
1. Inicialização
1.1. No início da 1ª iteração, define-se a velocidade em cada arco da rede como
“em vazio”, isto é V1i(a) = V0(a)
2. Iteração k
2.1. Afecta-se a matriz O/D toda, às velocidades iniciais da iteração k, Vk,i(a).
2.2. Os tráfegos resultantes dessa afectação para cada arco são guardados num vector
Tk(a), e com base neles calculam-se as velocidades finais da iteração k, Vk,f (a).
3. Correcção das velocidades
3.1. A velocidade inicial de cada arco na iteração (k+1) é calculada em amortecimento
das velocidades inicial e final desse mesmo arco na iteração k:
Vk+1,i (a)= 0.75. V k,i (a) + 0.25.Vk,f (a)
3.2. Regressa ao passo 2, excepto se o nº de iterações pré-fixado já tiver sido atingido
4. Encerramento
4.1. Para cada arco, faz-se a média simples dos valores dos fluxos obtidos em cada
uma das iterações, Tk(a), de que resulta o fluxo estimado para cada arco
4.2. A partir do fluxo em cada arco, calcula-se a velocidade de circulação nesse arco.
10/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de afectação de tráfego (VIII)
Este processo iterativo tem de funcionar com um nº pre-fixado de iterações
porque a verificação da condição de equilíbrio implica um esforço
computacional muito pesado
Por isso, os autores do algoritmo (Bureau of Public Roads, 1964)
recomendam a adopção de 8 iterações.
A nossa experiência recente (em redes mais congestionadas que o que era
típico nessa data) apontam como mais desejável m número de 16 iterações ou
a corrida inicial de uma afectação sequencial, cujas velocidades resultantes
servem para o arranque do algoritmo do BPR
A afectação em redes TC é muito mais difícil, porque
o viajante escolhe a paragem de embarque, mas aí pode haver várias
carreiras que o servem, sendo usada a primeira a passar (“escolha” aleatória)
quando há problemas de capacidade, os viajantes embarcando nas paragens
de jusante podem não conseguir embarcar no primeiro veículo da carreira
desejada, alongando o tempo de espera
11/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
CRÍTICA GERAL AO MODELO DOS 4 PASSOS (I)
O modelo de 4 passos enfrenta sérias críticas à sua capacidade para a
representação adequada dos padrões de mobilidade contemporâneos,
continuando no entanto a ser o mais usado
As principais críticas são:
Não inclui qualquer possibilidade de representação das inter-dependências
entre as várias deslocações da mesma pessoa ao longo do dia ou das suas
deslocações com as das outras pessoas do mesmo agregado familiar;
Não inclui qualquer consideração da escolha da hora a que se vai viajar
No 2º passo é feita a escolha (probabilística) de destinos a partir de cada
origem, baseada nos custos de deslocação para cada uma das zonas, mas
esses custos são dependentes das escolhas de modo, que são objecto do 3º
passo. A inversão desses dois passos resulta numa situação ainda pior, com a
escolha de modo a ser feita antes de se escolher o destino.
A escolha de modo no 3º passo é feita baseada em custos e tempos de cada
um dos modos, mas o nível de congestionamento só é conhecido no final do
4º passo, e isso poderia alterar os termos da escolha anterior
12/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
CRÍTICA GERAL AO MODELO DOS
4 PASSOS (II) Para as duas primeiras críticas não se conhece resposta adequada a não
ser o recurso aos modelos desagregados
Mas é hoje comum a realização conjunta do 2º e 3º passos, numa escolha
discreta de grande dimensão (grande número de alternativas), em que cada
alternativa é um conjunto (destino, modo), em que obviamente alguns pares
não existem por não haver ligação nesse modo a esse destino.
A utilidade de cada par (destino, modo) inclui componentes da utilidade positiva
(associada à massa do destino) e de utilidade negativa (associada ao custo e
tempo para lá chegar).
O 4º passo é corrido sobre as matrizes (Origem / Destino / Modo) assim
obtidas, e procede-se a uma iteração em que os resultados desse 4º passo
são realimentados sobre o passo anterior (fusão do 2º e 3º) para correcção
das velocidades e portanto das utilidades negativas.
O processo iterativo pára quando as diferenças dos tráfegos afectados nos
principais arcos em iterações sucessivas foram suficientemente próximas
13/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
MODELOS GLOBAIS DESAGREGADOS
Há no essencial 2 tipos de modelos globais desagregados:
um primeiro grupo, ainda da família “4 passos”, em que se procede à
desagregação da população de cada zona de acordo com o seu estrato etário,
inserção familiar e poder de compra (determinantes maiores do tipo de
mobilidade) e se correm os 3 primeiros passos separadamente para cada
grupo
um segundo grupo (Modelos baseados em Actividades), em que se procura
considerar as interacções entre viagens da mesma pessoa ao longo do dia e
entre viagens de várias pessoas do mesmo agregado familiar, e que funciona
por simulação, começando por identificar as viagens obrigatórias de cada
membro do agregado, e se estimam em seguida as outras viagens, em função
dos graus de liberdade remanescentes e do “grupo social” a que essa família
pertence (determinante dos seus desejos de mobilidade)
No primeiro tipo são poucos os ganhos, e no segundo são muito grandes
as dificuldades de modelação e calibração
14/14
Se
ss
ão
9:
O M
od
elo
de 4
pa
ss
os
(2ª
part
e):
Es
co
lha
Mo
dal
e A
fec
tação
de T
ráfe
go
, e C
ríti
ca G
era
l d
o m
od
elo
Instituto Superior Técnico / Mestrado Integrado Engª Civil – Transportes – Aulas teóricas
O Modelo de 4 passos:
Procedimento alternativo (diferencial)
aos dois primeiros passos
Face ás dificuldades de obtenção de bons resultados com os dois primeiros
passos deste modelo, há quem adopte uma formulação de tipo diferencial,
em que se parte da matriz do presente (conhecida) e se procura estimar a
do futuro a partir desta, com base nos seguintes procedimentos
estimam-se as alterações de usos de solo em cada zona e a partir delas as
novas bordaduras da matriz O/D;
procura-se uma matriz O/D futura que, respeitando as novas bordaduras,
tenha uma estrutura (i.e. relações entre valores das várias casas) tão
semelhante quanto possível à matriz do presente
Estes métodos são de aplicação muito fácil, havendo dois principais, muito
semelhantes: o de Fratar (americano) e o de Furness (inglês), a explicar na
aula prática


![Ensino de Computação de Forma Multidisciplinar em ...€¦ · objetivos [2]. Desse modo, ... ria uma decisão por parte do utilizador, que é feita por meio da atividade mental](https://img.pdfslide.net/doc/110x75/5f39452e135c9416e236c267/ensino-de-computao-de-forma-multidisciplinar-em-objetivos-2-desse-modo.jpg)




![Des2Parte [Modo de Compatibilidade] · A projeção ortográfica, na prática, pode ser feita de duas formas: no primeiro diedro: imagine vendo a peça a partir de um dos lados do](https://img.pdfslide.net/doc/110x75/5c0ce50809d3f252498cd686/des2parte-modo-de-compatibilidade-a-projecao-ortografica-na-pratica.jpg)

![Apresentacao 6 Encontro 110816 [Modo de Compatibilidade] · Barba feita, cabelos penteados. Maquiagem suave. Adereços discretos. Curso de Preparação de Palestrantes Espíritas](https://img.pdfslide.net/doc/110x75/5c01c46a09d3f2377a8dcfe3/apresentacao-6-encontro-110816-modo-de-compatibilidade-barba-feita-cabelos.jpg)



![SmartCITIES [Modo de Compatibilidade] - Manoel Veras · • Apresentação, Pedro Almeida, IBM. 2. Economia Digital feita com ... - Gerenciamento de tráfego Gerenciamento de Energia](https://img.pdfslide.net/doc/110x75/5c42502493f3c338dc26e7d7/smartcities-modo-de-compatibilidade-manoel-apresentacao-pedro-almeida.jpg)
![AULA INDICADORES [Modo de Compatibilidade]files.pereiraim.webnode.com.br/200000055-676a36864d/Aula...sucesso global de qualquer programa de monitoramento, e deve ser feita com base](https://img.pdfslide.net/doc/110x75/603f6e3fe6f79165e80159b1/aula-indicadores-modo-de-compatibilidadefiles-sucesso-global-de-qualquer.jpg)





![ppt aula01 [Modo de Compatibilidade] - reginaldobrito.com · A passagem de um slide para o outro pode ser feita incrementada por um efeito (animação). 7. Estilos prontos Ações](https://img.pdfslide.net/doc/110x75/5c0e272109d3f27c728c7f02/ppt-aula01-modo-de-compatibilidade-a-passagem-de-um-slide-para-o-outro-pode.jpg)