Embed Size (px)
Citation preview

Sheng-Fang Huang
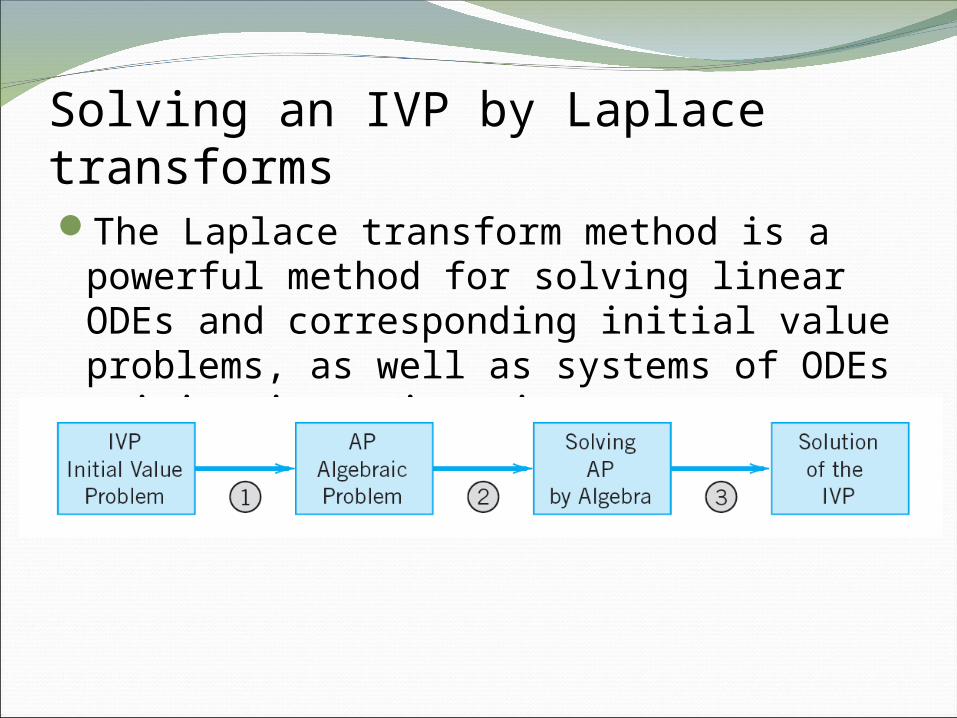
Solving an IVP by Laplace transformsThe Laplace transform method is a
powerful method for solving linear ODEs and corresponding initial value problems, as well as systems of ODEs arising in engineering.
6.1 Laplace Transform. Inverse Transform. Linearity. s-Shifting
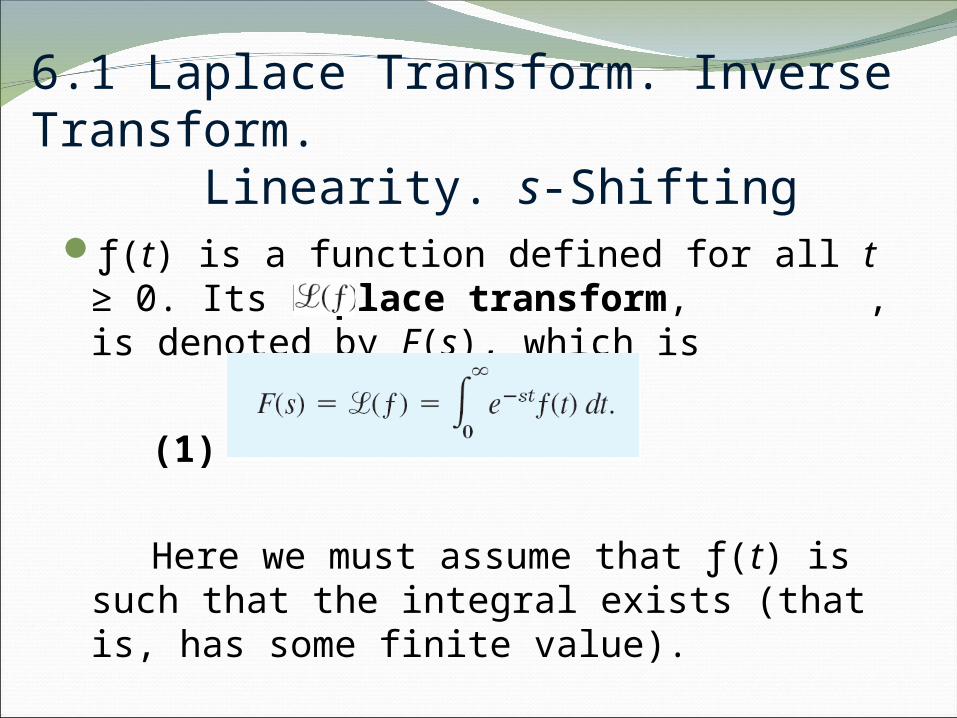
ƒ(t) is a function defined for all t ≥ 0. Its Laplace transform, , is denoted by F(s), which is
(1)
Here we must assume that ƒ(t) is such that the integral exists (that is, has some finite value).
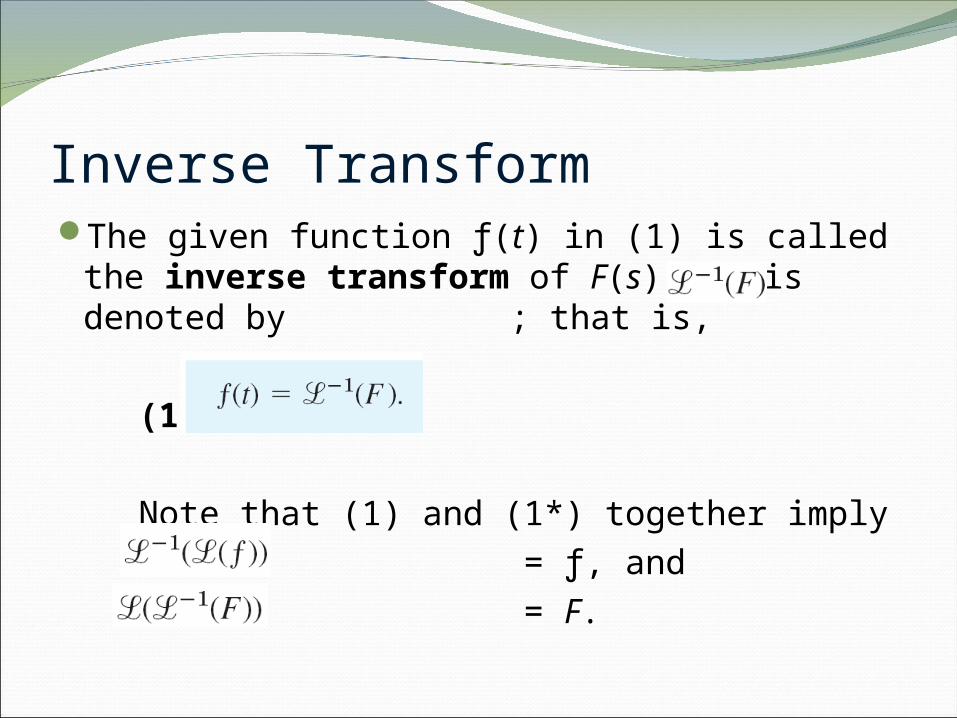
Inverse TransformThe given function ƒ(t) in (1) is called the
inverse transform of F(s) and is denoted by ; that is,
(1*)
Note that (1) and (1*) together imply = ƒ, and = F.
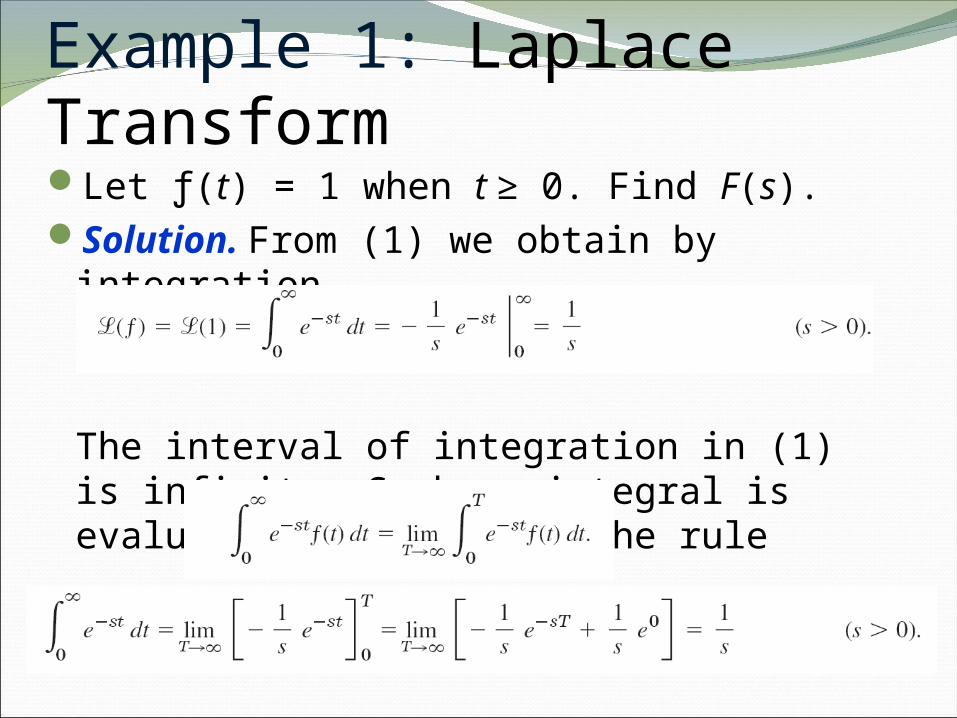
Example 1: Laplace TransformLet ƒ(t) = 1 when t ≥ 0. Find F(s).Solution. From (1) we obtain by
integration
The interval of integration in (1) is infinite. Such an integral is evaluated according to the rule
Example 2 Laplace Transform of the eat
Let ƒ(t) = eat when t ≥ 0, where a is a constant. FindSolution.
Linearity of the Laplace Transform
THEOREM 1
The Laplace transform is a linear operation; that is, for any functions ƒ(t) and g(t) whose transforms exist and any constants a and b the transform of aƒ(t) + bg(t) exists, and

Example 3 Application of Theorem 1: Hyperbolic FunctionsFind the transforms of cosh at and sinh at.Solution. Since coshat = 1/2(eat + e-at) and
sinhat = 1/2(eat – e-at),
Example 4 Cosine and SineDerive the formulas
Solution:
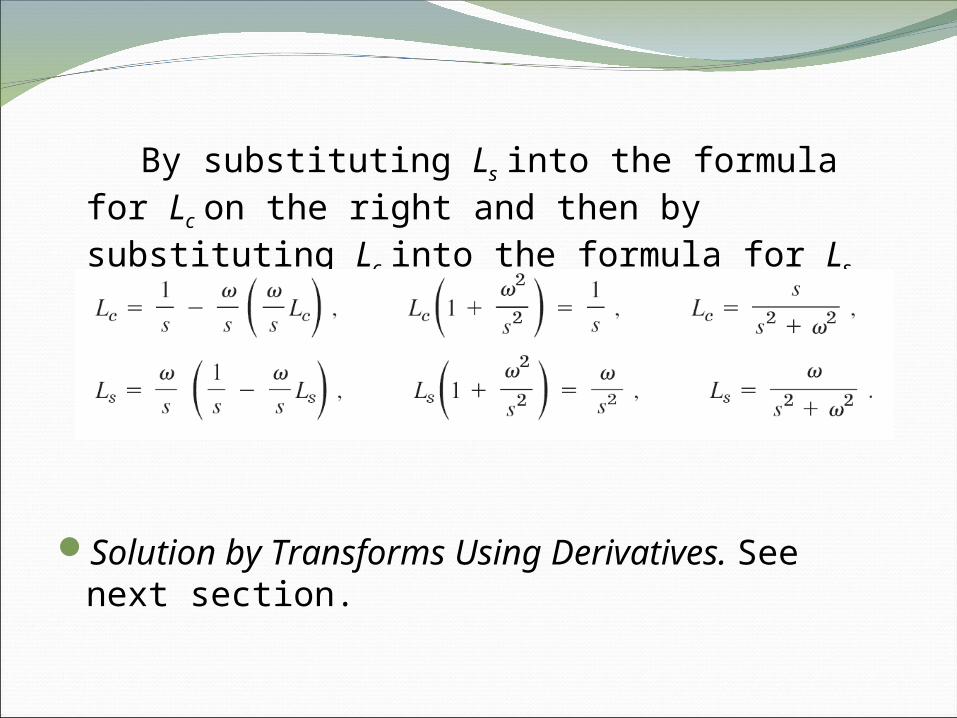
By substituting Ls into the formula for Lc on the right and then by substituting Lc into the formula for Ls on the right, we obtain
Solution by Transforms Using Derivatives. See next section.

Solution by Complex Methods. In Example 2, if we set a = iω with i = (–1)1/2, we obtain
Now by Theorem 1 and eiωt = cos ωt + i sin ωt
If we equate the real and imaginary parts of this and the previous equation, the result follows.

Some Functions ƒ(t) and Their Laplace Transforms

s-Shifting: Replacing s by s – a in the Transform
First Shifting Theorem, s-Shifting
THEOREM 2
If ƒ(t) has the transform F(s) (where s > k for some k), then eatƒ(t) has the transform F(s – a) (where s – a > k). In formulas,
or, if we take the inverse on both sides,

Example 5 s-Shifting: Damped Vibrations. Completing the Square
From Example 4,
For instance, use these formulas to find the inverse of the transform





























