Embed Size (px)
Citation preview

Received 9 March 1964 15.3
Signal Detection by Arrays with Arbitrary Processors and Detectors
Tav. ao• USnF•, Ja.
Unholtz-Dickie Corporation, Hamden, Connecticut
The signal-detection characteristics of local arrays of transducers that are used to detect the presence of a plane-wave random signal in an isotropic noise background are analyzed for the situation in which the trans- ducers are followed by identical nonlinear processors. The resulting signals are summed and detected by a square-law device with a low-pass filter. The performance of this system is compared to that for a system with linear processors and a square-law detector. Also analyzed are the signal detection characteristics of an array with linear processors and a non square-law detector. The performance is also compared to that for the linear system with a square-law detector. Results indicate that, for maximum output signal-to-noise (S/N) ratio, the system with linear processors and a square-law detector is optimum for both situations con- sidered above. The degradation in performance caused by deviations from the optimum is not great, how- ever. On an output-signal basis, defined by the difference between "on target" and "off target" output, the linear processor provides an optimum system, if there is a choice of processor function. However, no optimum exists when the processor is linear and there is a choice of detector function.
INTRODUCTION
HE signal-detection characteristics of local arrays of transducers for Gaussian signals and Gaussian- noise background have been extensively analyzed •-4 for the situation in which (1) the output of each transducer is subject to infinite clipping or purely linear processing; (2) the processed output signal from each transducer is summed; (3) the summed result is applied to a square-law detector; and (4) the squared sum is filtered.
Detection in the presence of impulsive noise has been treated by Middleton 5 for an array with two trans- ducers, and optimal or likelihood ratio techniques have been examined by Bryn 6 and Schultheiss 7 for Gaussian signals and noise.
However, the effect of using a general nonlinear processor following the transducer in Step (1) above has
x P. Rudnick, J. Acoust. Soc. Am. 32, 871-877 (1960). 2 j. j. Faran and R. Hills, "Correlators for Signal Reception,"
Harvard Univ. Acoust. Res. Lab. Tech. Mere. No. 27 (1952). a j. j. Faran and R. Hills, "The Application of Correlation
Techniques to Acoustic Receiving Systems," Harvard Univ. Acoust. Res. Lab. Tech. Mere. No. 28 (1952).
4 T. Usher, Jr., J. Acoust. Soc. Am. 36, 1444-1449 (1964). • D. Middleton, J. Acoust. Soc. Am. 34, 1598-1609 (1962). 0 F. Bryn, J. Acoust. Soc. Am. 34, 289-297 (1962). 7 R. A. McDonald, P. Schultheiss, F. Tuteur, and T. Usher,
Jr., "Processing of Data from Sonar Systems," GD/EB Subic Rept. U417-63-045 (1 Sept. 1963): P. Schultheiss, App. A-3.
not been evaluated for Gaussian signals in Gaussian noise. Neither has the effect of a general non square-law detector in Step (3) been examined, although results for even-power-law detectors have been reported. a
The two performance indices defined in an earlier paper 4 are used to provide a numerical indication of the signal detection efficiency for these cases.
The signal-response ratio R1 is defined to be the ratio of the normalized average signal output of the system with either the nonlinear processor or the non square-law detector to the normalized average signal output for the system with the linear processor and square-law detector.
Similarly, the index Ro is defined to be the ratio of the square root of the signal-to-noise (S/N) ratio of the directivity pattern for the system with either the non- linear processor or the non square-law detector to that for the system with the linear processor and square-law detector.
The major purpose of the analysis is to determine optimum processor functions and optimum detector functions for maximizing both response indices.
79
I. ASSUMPTIONS AND DEFINITIONS
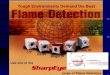
The system analyzed in the following sections is shown in Fig. 1. The reference system with linear
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

80 T. USHER, JR.
I
2 0 sz(t) + ngt) v (t)
z•fl
M 0 SM(t) + riM(t) J•r ¾M(t) TRANSDUCERS PROCESSORS SUMMER DETECTOR LOW-PASS
FILTER
FiG. 1. Array with nonlinear processors and non square-law detector.
processors and square-law detectors is typical of systems now being used.
Following are the major assumptions inherent in the analysis: (1) The transducers in the array have omni- directional characteristics. (2) The autocorrelation functions of both the signal and the noise inputs to the processors are identical. The signal power input and the noise power input to each processor do not vary from channel to channel. (3) The crosscorrelation between noise inputs for different channels is zero. (4) The signal and the noise inputs to the processors are Gaussian and stationary. Signal and noise are independent. (5) ?he processor is an odd-function, zero-memory device. (6) The detector is an even-function device.
II. AVERAGE SIGNAL OUTPUT--NONLINEAR
PROCESSORS AND SQUARE-LAW DETECTOR
For the system with the nonlinear processors, the bearing response pattern •3(0) is
M M
•3(0) = • Y'.(g{sg(t)q-ni(t)}g{sj(t)q-nj(t)}). (1) i=l
For the input signals to the processors,
,"S+N.
The normalized cross correlation a is
(2)
(Es • (t) + n,(t)-] Esi (t)-+- nj(t)
S+N
= Is•NP(ro) , i/j; L 1 i= j. (3) In Eqs. 2 and 3, p is the normalized autocorrelation
function for the signal, S is the total signal power, and
N is the total noise power. The ro depend on the spatial time delays and electrical time delays associated with the typical steered array. Well-known results 8.0 may be simplified to yield Eq. 4, which, in turn, may be used to simplify Eq. 1.
oo o .2n
(g(el)g(e•.)) = 5-', •(g[n] (e))•'a n n--O
=5-'.-- tt. - g(e) a". (4) n=O n!\ \a/
In Eq. 4, [n-] signifies the nth derivative of g(e), and tt,•(e/a) is the Hermite polynomial 1ø.11 of order n. The symbols () signify statistical averages taken with respect to the Gaussian variable e, having zero mean value and variance a •'.
The "on-target" response occurs when all to=0, and the "off-target" response occurs when the rii are all large enough so that the p(rg•) approach zero. These responses are found in Eqs. 6 and 7, respectively.
oo S (2n+l)
•o=M(g(e)•')q-(M•'-M) 5-', •(g[•'"+l](e))•'; (6) n----0 (2n+ 1)!
•) r,= M(g(e)•'). (7)
The normalized signal output/Xy' is
•2o- •2• Ay'=•= (M-- 1)
{ øø S(')'n-'F1) / } X ,5o(2n+l)!(g[•'•+l](e))•' (g(e)•'). (8) For the system with linear processors, g(e)=Ke and
•)A o= K•'(MNq-SM•'), (9)
•A•=K•'M(Nq-S), (10)
AyA'= (M-- 1) (S/S+N). (11)
The signal-response ratio R1 has previously been defined to be the ratio of Ay' to AyA'.
Ay I
\ S /
•. •+11 (e))• (g(e)•.) (12) X E (2n-l- 1)i (g '
AyA •
• S. O. Rice, Bell System Tech. J. 24, 139 (1945). • D. Middleton, Introduction to Statistical Communication
Theory (McGraw-Hill Book Co., Inc., New York, 1960), p. 246, Eqs. 5-15a, 5-15b.
•0 "Tables of Normal Probability Functions," Natl. Bur. Std. (U.S.) Appl. Math. Ser. 23, 1-10 (1953).
u j. I. Marcurn, Tables of Hermite Polynomials and the Deriva- tives of the Error Function (Rand Corp., Santa Monica, Calif., 1948).
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

SIGNAL DETECTION BY ARRAYS 81
An alternate form of R• is obtained by using the second form of Eq. 4.
gl= • (2n+l)! S+ e 2
>(<tt2,•+1((S_•N)l)g(e))/(g(e)2)}. (13) From Eq. 13, it is evident that only the first term of
the series is important for small values of input S/N ratio. Then,
a2(g m (e))• (eg(e)) 2 R•---. = for S/N<<I. (14)
(g(e) •) a•(g(e)2) '
It is interesting to note from Eq. 3 that, for large values of S/N ratio, the sum in the numerator of Eq. 12 approaches (g(e)2}. Thus the signal-response ratio ap- proaches unity. Under strong-signal conditions, then, the average signal performance of the system with nonlinear processors approaches that of the system with linear processors.
Also, if one considers the nonnegative function ((Xg(e)+e)2•, where X is an arbitrary parameter, it is easily shown that R•_< 1 for S/N<<i in Eq. 14. Note that if the function is set equal to zero, the solutions for X must be complex or, at most, real and equal.
Since all terms in the series expression for R1 are positive, unity is an upper bound for R1 for all ratios of S/N. Furthermore, the signal-response ratio is equal to unity only if g(e) is a linear function of e (i.e., g(e)=Ke), so that Ri< 1 for all finite-input S/N ratios for all nonlinear processors. Thus, the linear processor is optimum in the sense of producing maximum normal- ized average output signal for the array.
III. SIGNAL-TO-NOISE RATIO AT OUTPUT OF ARRAY--NONLINEAR PROCESSORS
AND SQUARE-LAW DETECTOR
The goal of this section is the development of an expression for the performance index R2, which is the ratio of the square root of the S/N ratio for the system with nonlinear processors to that for the system with linear processors. Since the expressions for average signal output were developed in the previous section, most of the analytical development in this section is concerned with the evaluation of the variance of the
output of the low-pass filter in Fig. 1. In general,
Ry(r)=E[y(t)y(t-{-r)•=l)2-{-Rv'(r), (15)
where •) represents the average array output, and R' (r) is the autocorrelation function for the variational
component of y(t). The variance of the output of the low-pass filter is then given by
a•=cov Ru' (r)dr, (16)
where coy is a constant, depending on the properties of the filter, if the bandwidth of the filter is small as compared to the noise bandwidth.
Thus, the autocorrelation function for y(t) becomes the following, if the input S/N ratio is small'
M 211
=ELY'. 5-'. g{n•(t)}g{n•(t)} i=] i=•
M M
X 5-'. 5-'. g{n•(t-{-r)lg{n•(tq-r)}-]. (17) k:l /=1
Separating the terms in Eq. 17 into different categories, expanding the resulting terms with the help of Eq. 4, and noting that g•(e) is an even function, we have •2
Ry(r) : (M<g2})2q-M(•.• <t]2g2)•p•+•<H4g2}•p4+•<Hog•)•po+ . ' . q- 2 (M•-- M) <t],g)4p2+--<H•g>2(t]ag>2p 4 3!
1 2 (tt,g)2]•s_t_ ) F•(Hag}2(tt•g 2 )2-JF•.•(t]lg) • ... , L3!3! 5! L3!5! (18)
where • is the normalized autocorrelation function for the input noise.
The first term in Eq. 18 is simply •. The second term is small in comparison with the third if M is large.
From Eq. 16, we get
[ ,f0 2 - •2 . (M•--M) (tt,g) pedrq---(t]1g)2(ttag) • Oz --'- •F
X•o•p4dr-{ - ' ' .], S/N<<I/M. (19)
For the system with linear processors, g(e)= Ke. The .o 2 ternas in Eq. 18 are the only ones that are nonzero. The variance of the output of the low-pass filter for this case becomes
a•A2= 2•orM2K4N 2 •2dr, S/N<<I/M. (20)
The definition of R2 yields
(21)
• Ref. 7, App. A-4.
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

82 T. USHER, JR.
1.0
Ke m e ) 0 •(e)-•o ß- o
L Klel m e ( 0
i 2 3 4
Fro. 2. Signal-perform- ance index Rx and S/N per- formance index R2 as func- tions of exponent for odd- function power-law proc- essors.
Substitution of the results in Eqs. 6, 7, 9, 10, 19, and 20 for small S/N results in the following expression'
2 (tt3g) R•.= lq ..... 3! (Hlg)
.31 + !3! (Hlg) 2 {Hsg)=•Aøq_...] -«, (22)
In Eq. 22, A 9., is defined to be
A •,•= o'•n(r)dr. (23)
An inspection of Eq. 22 reveals that R= is less than unity for all g(e), for which
(H=,,+l(e/(r)g(e))-o'2n+l(g [2n+•] (e))•0, for n>_ 1. (24)
The only function excluded from the inequality in Eq. 24 is the linear function g(e)=Ke, for which R=--1, because all derivatives of the function higher than the first are zero. Thus, the linear processor is optimum because it produces a S/N ratio at the array output that is greater than the S/N ratio for any nonlinear processor.
The previous conclusion is also correct for small M, since it is possible to show that the second group of terms multiplying M in Eq. 18 is always larger than the third group multiplying (M2--M).
In the following section, the general results in Secs. II and III are evaluated for several types of nonlinear processors.
IV. EVALUATION OF R• AND Rs FOR SPECIFIC NONLINEAR I•ROCESSORS
A wide class of nonlinear processors is described by the general power-law relation found in Eq. 25. Note that g(e) is an odd function of e.
Ke '•, for e> 0;
, for e=0; (25) g(e)= Kiel '•, for e<0.
It is given • that
f0 • 1 .- e-C•/•-)x•dx= . 2(•-1/•)(k--1/2)!, (26)
where (k)! is the general factorial function (k is not necessarily an integer).
With Eq. 14 and the results in Eqs. 25 and 26, the performance index R1 becomes
R•(m)=g2/x/;r3 • ! !//(m--})! . (27) The result in Eq. 27 is plotted in Fig. 2. It can be seen that the maximum value of R1 occurs for m= 1. How- ever, the peak is sufficiently broad so that the value of m may vary between zero and three for values of Ri>_ 0.6. Note that the value m=0 yields the function that describes the infinite clipper.
With the help of Eqs. 24 and 26, the expression for the performance index R= found in Eq. 22 may be evaluated. Using
o(r) = •-•01•1, (28)
one finds from Eq. 23 that
A •,,/A •= 1/n. (29)
The performance index R2 becomes
R=(m)=[lq-{(m--1) • 1 1
•(m-- 1)4-t-•(m -- 1)=(m-- 3) = 108 180 +...1 -«. (30)
Equation 30 is evaluated and plotted as a function of m in Fig. 2. It may be noted that the series terminates when m is an odd integer, and converges rapidly when m is reasonably small.
The maximum value of R= is seen to occur for m= 1, as expected. The peak of the function, however, is again very broad.
Another processor function that has evoked some interest is the infinite clipper with a dead zone at high amplitude. The function is defined in Eq. 31.
0, e>el;
g(e)= 1, 0<eSel; (31) --1, 0, e<--el.
Using the result in Eq. 14 for R1, we obtain
Rl(a) = (2/r)[1--exp(--a2/2)•/P(a), (32)
where a=el/a and P(a) is the normal probability
xa E. Jahnke and F. Emde, Tables of Functions (Dover Publi- cations, Inc., New York, 1945), p. 20.
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

SIGNAL DETECTION BY ARRAYS 83
function •ø defined by
• 1 exp(--x2/2) dx. (33) Equation 32 is evaluated in Fig. 3.
It is evident from an examination of Fig. 3 and Eq. 32 that the infinite clipper with high-amplitude dead-band is an extremely poor processor to use if the root-mean- square value of the input noise is large relative to the level at which the dead zone appears. For all values of a, the device is inferior to a simple infinite clipper.
An expression for the S/N performance index may be written following the calculation of the required averaged functions found in Eq. 22. It may be shown that
Ha,,+, g(e) = [-2 fra'• (O)-- f[a'• (a)-]=' 2Ba,• (a), (34)
FIG. 3. Performance in- dices as functions of normal- ized dead-zone level for
infinite clipper with dead zone at high amplitude.
1.0
2/•-
.Ol
- • i i it111 i L i 1111•
_ _
i i I i i i •111
where/tal (a) is the derivative of the order 2n of the Gaussian density function with zero mean and unit variance evaluated at a. These derivatives are numeri-
cally tabulated in the literature? In terms of the func- tion Ba,(a), R2 is found in Eq. 35. Note that higher- order terms have been added.
l(B2• • i (B•.•4+ 1(B4'] 2 1 (B2(B4• •101 (Bo•' + } 1 (B4• 4 1 (B2•2(B6]a+_ 1 _(Bs• • q-{'72 (•00\•00/+' 75 600\•00/\•00/ 907 200\B0/ + { 1 815 000\•oo/\•oo/+ 6 530 000'\•00/\•0/
1 -,. + t +-'- (35) 1.2X 108\•-•/
The series in Eq. 35 does not converge well for values of a< 1. For a=0, the series is definitely divergent so that Rs(O)=0. Results from Eq. 35 are plotted in Fig. 3.
From Fig. 3, it can be seen that the performance of the infinite clipper with high-amplitude dead band approaches that of the simple infinite clipper for large or: el//tr, aS expected. Below a = 3, however, the perform- ance indices decrease rather sharply, which indicates that the device has little utility as a processor.
V. AVERAGE SIGNAL OUTPUT--LINEAR PROCESSORS AND NON SQUARE-LAW DETECTOR
In preceding sections, it has been determined that the use of linear processors with a square-law detector maximizes both performance indices. In this section, the performance of a non square-law detector with linear processors is examined. It would be desirable to obtain expressions for the performance indices of arrays utilizing nonlinear processors and a non square- law detector, but the mathematical expressions become extremely cumbersome. For this reason, the following analysis is limited as indicated. Since the use of linear processors with square-law detectors was optimum,
perhaps the use of linear processors with non square-law detectors is not unduly restrictive.
With reference to Fig. 1, the detector function y(x) is assumed to be an even function of x. The input x is Gaussian because the transducer outputs are all Gaussian, and the processors are linear. For the "on- target" case, the signal components from each channel are completely correlated and the noise components are assumed to be uncorrelated. For the "on-target" case, x(t) becomes
x(t) = xo(t) = Ms (t)-+-Mln (t), (36)
where s(t) and n(t) are representative signal and noise time functions at any transducer output. For the "off-target" case, the signal components are un- correlated, and so are the noise components. We have
x(t) = xz; (t) = M•s (t) + Mh• (t). (37)
The "on-target" and "off-target" array outputs are defined by Eqs. 38 and 39, are expanded in a Taylor series about the argument M,•n, and the averages taken as indicated.
(38)
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

84 T. USHER. JR.
(y •)z• =(y(M«s+M•n)}=(y(M•n)} \ 2! ! [2• (M•n))-]- ' • )(yt41 (M•n) - .Mns2n-
+{ (39) Only even-order terms appear in Eqs. 38 and 39, since the average of odd-order derivatives of even functions yields zero.
The normalized signal output is
For the square-law detector,
øøM•'•--M• }/ k.•. 1 Sk(y [•'k• (Mln)) = (2k)! } • (2k)! Sk(yt•l (M«n)) . (40)
Ay.•'= (M-- 1)[-S/(Sq-N)•.
Thus, the signal-performance index is
gI---- Ay •
E S•(y • (M•n)) •o (2k)i S•(yt•'k• (M•n)) . S k=l (2k)!
(41)
(42)
An alternative form for Eq. 42 is
$+S l øø gk-l+gk-2+ ' "+l(-••)k( (•X•) )}/ R•- • H•.• y(Min) S •=1 (2k)! Mk(S)•((n) )] • (2k)i • H•.• •-• y(Mln) . (43) k----0
It is evident from an examination of Eq. 43 that only the first term of each series expression is not negligible for small values of S/N. For small values of S/N, we have
1 n
R1 = •(H2 (-•)y (Mln)) /(y (M«n)):-}MN(•'•" (M'n))/(y 1 x
S/N<<I/M, (44)
where x- Mln and a•'= MN.
The expression in Eq. 44 does not yield an optimum detector function y(x). A demonstration of the validity of this statement is found in Sec. VII, in which R• is evaluated for different detector functions.
VI. SIGNAL-TO-NOISE RATIO--LINEAR PROCESSORS
AND NON SQUARE-LAW DETECTOR
For the purpose of mathematical simplicity, the S/N performance index R•. is determined for small values of S/N.
Since x(t) is Gaussian, Eq. 4 may be applied to yield an expression for the autocorrelation function of the detector output.
• 1
Ry(r)- • tr4t•(y [2•1 (x))2p2k(r). (45) •--o (2k)!
The first term of Eq. 45 is simply the square of the average array output, and all other terms represent the autocorrelation of the variational component of
y(t). Thus, from Eqs. 15 and 16, for low values of S/N
• 1 f0 • trff'=oovZ•(MN)•'•(yt•'a(Mln)? p2•(r)dr. (46) k=i (2k)!
For the square-law detector (y=x•'), either Eq. 22, in which K-1, or Eq. 46 gives
o'sif' = 2co rM•'N •' o•'(r)dr. d0
(47)
The definition of R•. in Eq. 21, together with the first two terms in Eqs. 38 and 39 and also Eqs. 9-11, 46, and 47, yields the expression for R•.:
2 •k (yt•.• (x))2 A 2•1 -i R•'=[•=• 1 (2k)i (v) -•(yt•.,(x))•. ];J ' (48)
In Eq. 48, v•'=MN, x=Mln and S/N(<I/M.
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

SIGNAL DETECTION BY ARRAYS 85
For the function y= x 2 it is observed that
yt2k](x)=0, for k>l, (49)
and, thus,
(y[Sk] (x)) = 0, for k> 1. (50)
For all other functions
y[2•](x)yaO, for some k and x, (51)
and, thus,
(yr•k](x))ya0, for some k. (52)
Since all terms in Eq. 48 are positive and the first term is unity, y(x)= x • therefore produces a maximum value for Rs, and the square-law detector is optimum with respect to output S/N ratio.
In the following section, R1 and R• are evaluated for specific detector functions.
VII. EVALUATION OF R, AND R2 FOR SPECIFIC DETECTOR FUNCTIONS
A wide class of detector functions is described by the general power-law relation in Eq. 53.
y(x)=KIxl "'. (53)
Equation 26 is helpful in evaluating terms appearing in Eqs. 44 and 48. From Eq. 44, we obtain
Rl(m)=m/2. (54)
From Eq. 54, the signal-performance index increases linearly with m.
From Eq. 29, A 2k/A •= 1/k for a low-pass input-noise spectrum, and is less than 1/k for other spectra. TM From Eqs. 48, 26, and 53, the performance index R2 becomes
21 21 R,m) = lq----(m--2)sq----(m--2)S(m--4) s 4!2 6!3
2 1 1 --•. q--- -(m-- 2)2(m--a)S(m--6)sq - . . . (55) 8!4
The results in Eq. 54 are plotted in Fig. 4 as a function of m. The results compare favorably with those pub- lished by Faran and Hills. 3
Fro. 5. Performance indices as functions of normalized dead
zone for detector function y--0 for Ix [ _•x, and y = 1 for Ix [ >x•.
io
1.0
.I
R I
Another detector function is given in Eq. 56.
tO, -- x• < x_< x• ; y(x)= 1, •.srwa•. Evaluating the terms in Eq. 44, we obtain
•-P(•)
(56)
for (57)
for
where • = xl/a. The performance index R• is evaluated with the help
of the following result'
H2n • y(x) = (2/r)«1t2,•_1(•) exp(--•s/2). (58)
Using Eq. 58 with Eqs. 48 and 4, we obtain
Rs= lq---- I 1-... 4! 2 /•. 6! 3
2 1 Hsn_l•(fi) 1 -«, q- (2n)[ n Bs 1- S/N<<I/M. (59) Equation 59 has been evaluated with the help of Tables TM for six terms of the series. For large values of •, the series converges slowly. The results of the evalua- tions of Eqs. 59 and 57 are found in Fig. 5.
Figure 5 shows that the performance of the detector with dead band compares favorably with that for the square-law device in the region where 1<•<2 or 1 < xS/MN < 4.
Fro. 4. S/N per- formance index as a
function of exponent for even-function
power-law detector.
1.0
I I I I
0 2: 4 6 8
•4 Ref. 7, pp. A2-23, A2-24.
VIII. CONCLUSIONS
The investigation in Secs. II, III, and IV has shown that the selection of linear processors from a general field of odd-function processors is optimum from the standpoint of both performance indices. It is assumed that a square-law detector is used in conjunction with the odd-function processors.
The evaluation of the performance indices in Sec. IV for specific processors shows, however, that the array performance is not greatly degraded for certain proc- essor functions that deviate significantly from the
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48

86 T. USHER, JR. -
linear function. For the odd-power-law device,
R•>_0.6 and R2_>0.75, for 0_<m_<3. (60)
However, performance was degraded greatly with the infinite clipper with dead band when the root-mean- square value of the signal plus noise was equal to or greater than the dead-band level of the processor. The examples indicate that significant performance deg- radation occurs only when the processor has dead space or zero output for a significant range of the input variable.
Thus, the use of the infinite clipper (m-0) as an array processor does not cause significant degradation in performance, particularly in view of the other advantages, treated in part in an earlier paper. 4
The investigation in Sees. V-VII, which treats an array with linear processors and a general even- function detector, has shown that the square-law detector is optimum from the standpoint of output S/N ratio. However, other detectors, particularly power-law devices with exponents greater than two, yield greater signal detection indices than the square- law device. This is a distinct advantage, since sup- pression of the "off-target plateau" in the typical bearing response pattern is a desirable result.
As in the investigation with the processors, the optimality of the square-law device with respect to the S/N index is not critical. For example, for the power- law detectors, R•.>_0.75 for 0<_m<6.
The results for the dead-band detector are interesting in that performance comparable to or somewhat better
than that for the square-law detector could be obtained if the dead-band level of the detector is adjusted properly. For example, Rx = 2.5 and R•.=0.93 if/S= 2.
The general results above are also confirmed by investigations using likelihood ratio techniques. 7 For zero-noise crosscorrelation between transducer outputs, likelihood-ratio techniques yield a system identical to that in Fig. 1 with linear processors and a square-law detector, except that the processors are preceded by optimum linear prefilters. •5
The results of the analyses in this paper are not changed in the slightest by assuming different spectral properties for signal and noise, and by using optimum prefilters before the processors. The relations for determining a z 2 are the only ones depending on spectral shape, and, since these depend only on noise properties, they may be made sufficiently general by adding a subscript n to the normalized autocorrelation function appearing in these relations. The use of the prefilter simply maximizes S/N before the remainder of the processing in the array takes place.
ACKNOWLEDGMENT
This paper is an outgrowth of research conducted at Yale University under contract to the Electric Boat Division of General Dynamics Corporation as a part of their contract to the U.S. Office of Naval Research
(Code 466). •5 C. Echart, "Optimal Rectifier Systems for the Detection of
Steady Signals," Univ. Calif. Scripps Inst. Oceanog. Marine Phys. Lab. S-10 Ref. 52-11 (4 Mar. 1952).
Redistribution subject to ASA license or copyright; see http://acousticalsociety.org/content/terms. Download to IP: 130.216.129.208 On: Sat, 06 Dec 2014
17:35:48