Embed Size (px)
Citation preview

Simulation of 3D Multistage Axial CompressorUsing a Fully Conservative Sliding Boundary
Condition
Hongsik IM ∗, Xiangying Chen†, Gecheng Zha‡
Dept. of Mechanical and Aerospace EngineeringUniversity of Miami
Coral Gables, Florida 33124E-mail: [email protected]
Multistage 3D steady and unsteady viscous computationsare conducted for a transonic axial compressor with an IGV,rotor and stator blade row. A fully conservative sliding tech-nique is developed with high order shock capturing schemesto better capture the interaction between stationary and ro-tating blade row. A 1/7th annulus is used for the unsteadysimulation with a phase lag BC. For comparison purpose,a steady simulation of the same multistage compressor withsingle blade passage is performed using the mixing plane ap-proach. It is shown that the sliding BC captures wake prop-agation very well in the interaction between blade rows. Theunsteady multistage simulation using sliding BC and phaselag BC predicts almost identical loading distribution to thesteady state simulation at the mid-span, but have significantloading distribution difference at tip section.
1 IntroductionThe interaction between rotating and stationary blades
introduces inherent unsteadiness to the flow of multistageturbomachinery. There are typically two approaches to treattwo adjacent blade rows in relative rotation frame; mixingplane and sliding interface.
Mixing plane method has been widely used due to itssimplicity. Denton [1], Dawes [2], Singh [3], and Chen[4] used mixing plane approach to calculate multistage ma-chines. In this approach the circumferential-averaging is typ-ically used in order to achieve the radial profiles and con-serve the mass flow. Most researchers [1–4] exchange theflow data between two blade rows using less than two cellsfor the mixing BC. Gerolymos et al. [5] overlapped multiplephantom cells where the averaged quantities of the oppositedomain are stored. There are two major disadvantages thatarise with mixing plane. First, mixing plane generates arti-
∗ Graduate Student, AIAA Member† Research Associate Professor, AIAA Member‡ Associate Professor, ASME Senior Member
ficial mixing loss [6] due to averaging the non-uniform flowat the mixed-out and mixed-in plane. Second, the effects ofunsteady interaction between inter-blade rows could not betaken into account. Barter et al. [4] presented an effect ofunsteady interaction that changes the blade loading of theupstream blade in a multistage transonic turbine.
Sliding interface methods are often used for multi-stageunsteady rotor-stator interaction. For instance, the shockwave interaction between the inter blade rows as well asrotating instabilities such as NSV(Non-Synchronous Vibra-tion) and rotating stall can be predicted not by the steady ap-proach, but only by the conservative unsteady approach. Nu-merous studies on the unsteady rotor/stator interaction hasbeen developed [7–10] based on interpolation on the rotor-stator interface. Rai [7] used the patched and overlaid gridsystem based on interpolation to solve an axial turbine witha rotor-stator configuration. Chen et al. [11] pointed out thatlack of flux conservation can significantly affect the solutionaccuracy where shock interaction exists between the bladerows. The fact is the methods of rotor/stator interaction usingany type of interpolation methods can not satisfy the conser-vation of the flux across the interface.
The phase-lagged technique for periodic circumferen-tial boundaries can dramatically reduce computational ef-forts since it enables the use of the reduced model instead offull annulus simulation. The phase-lagged methods are basedon the assumption that if two adjacent blades oscillate with aphase difference, the fluid flow at the boundaries associatedwith these blades will also vary in time with the same phase.The conventional way to treat the phase shifted boundaryis a direct store method suggested by Erods et al. [12]. Inthis method the flow variables on the periodic surface arestored over the oscillation. These data are then used to up-date the corresponding periodic boundary with a time lag.This method is simple, but requires large computer memory.
In this study three major simulation techniques for themultistage turbomachinery are developed and implemented;
Proceedings of the ASME 2011 International Mechanical Engineering Congress & Exposition IMECE2011
November 11-17, 2011, Denver, Colorado, USA
IMECE2011-62049
1 Copyright © 2011 by ASME

2 NAVIER-STOKES EQUATIONS IN A ROTATING FRAME 2
a mixing plane, a sliding BC, and the phase lag BC suggestedby He [13]. The multistage axial compressor designed byGeneral Electric is used for the steady/unsteady simulations.The steady simulation for a single passage of IGV, rotor, andstator is performed using the mixing plane. Using the slid-ing BC, the unsteady simulation is carried out for the 1/7thannulus that satisfies the geometric periodicity.
For transonic multi-blade row numerical simulation, lowdiffusion and shock capturing capability have large impactson the accuracy due to the shock wave interaction withboundary layer and tip vortices and, wake propagation. Forexample, Gerolymos et al. [5] applied the MUSCL Van Leerflux vector splitting with Van Albada limiters to solve a fourstage axial turbine at a off-design point where strong cou-pling of the flow field between the blade rows is dominant.Comparison of CFD and experiment shows that the mixingplane overestimated efficiency by about 2%, and the pre-dicted radial profiles such as total pressure, total tempera-ture, and flow angle shows large discrepancy compared tothe experiment.
In the present study, the Low Diffusion E-CUSP (LDE)Scheme [14] as an accurate shock capturing Riemann solveris used to resolve the unsteady interaction between the bladerows. The LDE scheme can capture crisp shock profile andexact contact surface discontinuities as accurately as the Roescheme [15]. However, it is simpler and more CPU efficientthan the Roe scheme due to no matrix operation. The 3rdorder WENO reconstruction for the inviscid flux and 2nd or-der central differencing for the viscous terms [16] are used.An implicit unfactored Gauss-Seidel line iteration is used toachieve high convergence rate. The high-scalability parallelcomputing is applied to save wall clock time [17].
Nomenclaturea speed of sound,
√γp/ρ
Cm meridional absolute velocity,√
C2x +C2
rCx,Cθ,Cr absolute velocities in x, θ, r directiond distance from the closest wallE,F,G inviscid flux vectors in ξ,η,ζ directionEv,Fv,Gv viscous flux vectors in ξ,η,ζ directione total energy per unit massJ Jacobian of the coordinate transformationI Identity matrixL∞ blade chord at hubl normal vector on ξ surface with its magnitude
equal to the elemental surface area and pointingto the direction of increasing ξ
lt grid moving velocityM∞ reference Mach number, U∞
a∞po total pressurePr Prandtl numberPrr turbulent Prandtl numberQ conservative variable vectorqk total heat flux in Cartesian coordinatesRe Reynolds number, ρ∞U∞L∞
µ∞Ro Rossby number, ΩL∞
U∞
To total temperatureU,V,W contravariant velocities in ξ,η,ζ directionU∞ reference velocityV relative velocity vectorVx,Vθ,Vr relative velocities in x, θ, r directiony+ dimensionless wall normal distanceα swirl angle, tan−1(Cθ/Cm)β pitch angle, tan−1(Cr/Cx)∆t physical time stepδik Kronecker delta functionµt turbulent eddy viscosityν kinematic viscosityν working variable of the S-A model related to
turbulent eddy viscosityΩ rotor angular frequency in radians/secτik shear stress in Cartesian coordinates
Subscriptsi, j,k indiceso stagnation conditions∞ reference variable at rotor inlet
AbbreviationIGV inlet guide vaneBC boundary condition
2 Navier-Stokes Equations in a Rotating FrameThe governing equations solved in this study are the
equation of motion of fluid flow for turbomachinery in a rel-ative frame of reference, which can be derived by addingthe effects of coriolis force (2Ω×V) and the centrifugalforce(Ω×Ω×r) to the equation for the absolute frame. Ex-panding this momentum equation with continuity and energyequations in a rotating Cartesian system(x,y,z) as shown inFig. 1 and applying coordinate transformation to the general-ized coordinate system(ξ,η,ζ), the dimensionless Reynolds-averaged 3D Navier-Stokes equations with the SA(Spalart-Allmaras) turbulence model [18] can be expressed as the fol-lowing conservative form:
x
y
z
Ω
Fig. 1: The Cartesian system with y and z axes rotationabout the x-axis at a constant speed Ω
2 Copyright © 2011 by ASME

2 NAVIER-STOKES EQUATIONS IN A ROTATING FRAME 3
∂Q∂t + ∂E
∂ξ + ∂F∂η + ∂G
∂ζ = 1Re
(∂Ev∂ξ + ∂Fv
∂η + ∂Gv∂ζ +S
)(1)
The conservative variable vector Q, inviscid flux vectorE, the viscous flux vector Ev and the source term vector S areexpressed as follows and the rest can be expressed followingthe symmetric rule.
Q =1J
ρρuρvρwρeρν
(2)
E =
ρU
ρuU + lx pρvU + ly pρwU + lz p
(ρe+ p)U − lt pρνU
(3)
Ev =
0
lkτxklkτyklkτzk
lk (uiτki − qk)ρσ (ν+ ν)(l•∇ν)
(4)
S =1J
00
ρReRo2y+2ρReRow
ρReRo2z−2ρReRov
0ρCb1 (1− ft2) Sν+
1Re
[−ρ
(Cw1 fw − Cb1
κ2 ft2)( ν
d
)2
+ ρσCb2 (∇ν)2 − 1
σ (ν+ ν)∇ν•∇ρ]
+Re[ρ ft1 (∆q)2
]
(5)
where the overbar denotes the Reynolds-averaged quantity,and the tilde is used to denote the Favre averaged quantity. U ,V and W are the contravariant velocities in ξ, η, ζ directions.For example, U is defined as follows.
U = lt + l•V = lt + lxu+ lyv+ lzw (6)
where
lt =ξt
Jdηdζ, l =
∇ξJ
dηdζ (7)
When the grid is stationary, lt = 0. In the current discretiza-tion, ∆ξ = ∆η = ∆ζ = 1.
The shear stress τik and total heat flux qk in Cartesiancoordinates is given by
τik = (µ+µt)
[(∂ui
∂xk+
∂uk
∂xi
)− 2
3δik
∂u j
∂x j
](8)
qk =−(
µPr
+µt
Prt
)∂T∂xk
(9)
where µ is determined by Sutherland’s law. The above equa-tions are in the tensor form, where the subscripts i,k repre-sents the coordinates x,y,z and the Einstein summation con-vention is used. Eq.(8) and (9) are transformed to the gener-alized coordinate system. The turbulent eddy viscosity µt isdetermined by the SA one equation turbulence model as thefollowing:
µt = ρν fv1 (10)
where
fv1 =χ3
χ3+c3v1, χ = ν
ν
r = νReSk2d2 , S = S+ ν
Rek2d2 fv2, fv2 = 1− χ1+χ fv1
S =√
2ωi jωi j, ωi j =12
(∂ui∂x j
− ∂u j∂xi
)The rest of auxiliary relations and the values of the coeffi-cients given by reference [19] are used.
The normalized equation of state as a constitutive equa-tion relating density to pressure and temperature in the rela-tive frame is defined as
ρe =p
(γ−1)+
12
ρ(u2 + v2 + w2)− 12
ρr2Ro2 (11)
where r (=√
y2 + z2) is the normalized radius from the ro-tating axis, x in this study. For simplicity, all the bar and tilde
3 Copyright © 2011 by ASME

4 SLIDING INTERFACE FOR UNSTEADY ROTOR/STATOR INTERACTION 4
in above equations will be dropped in the rest of this paper.
2.1 Implicit Time Marching SchemeThe 2nd order implicit method is used with the dual time
stepping method [16, 20]. A pseudo temporal term ∂Q∂τ is
added to the governing equation Eq. (1). This term van-ishes at the end of each physical time step and has no influ-ence on the accuracy of the solution. The pseudo temporalterm is discretized with first order Euler scheme. Let m standfor the iteration index within a physical time step, the semi-discretized governing equation can be expressed as
[( 1∆τ +
1.5∆t
)I −
(∂R∂Q
)n+1,m]
δQn+1,m+1
= Rn+1,m − 3Qn+1,m−4Qn+Qn−1
2∆t
(12)
where ∆τ is the pseudo time step, and R is the net flux of thediscretized Navier-Stokes equations.
3 Mixing Plane for Steady Rotor/Stator InterfaceA mixing plane technique is implemented using the
ghost cell approach as sketched in Fig. 2. The conservativevariables are averaged and stored to the corresponding ghostcells of the adjacent domain using the following relations be-tween the moving frame and the fixed frame. For example,the flow quantities of the cell n− 1, and n in the fixed do-main are volume averaged circumferentially, and then storedto the ghost cell m+ 2, and m+ 1 in the moving domain.This method couples two domains and facilitates higher or-der spatial schemes at the interface.
ρ
ρUρVr
ρ(Wθ + rRo)ρe+ ρVθrRo
ρ ¯ν
Fixed
=
ρ
ρUρVrρWθρeρ ¯ν
Moving
(13)
where the overbar denotes volume-averaged variables as
Φ =1V
∫ ∫ ∫SR
ΦdV (14)
As aforementioned, the circumferential average cut offthe wake propagation and add artificial mixing loss to thecalculation. However, the mixing plane method is convenientto couple multi-stage computation.
Fixed domain
Moving domain
Circumferentially averagedghost cells overlapped withdownstream domian
Circumferentially averagedghost cells overlapped withupstream domian
n+2n-2 n-1 n n+1
m-2m+1 m-1mm+2
Fig. 2: Ghost cell approach for mixing plane
4 Sliding Interface for Unsteady Rotor/Stator Interac-tionAn accurate high order scheme in space is necessary for
multistage axial compressors in order to rigorously resolveinteraction effects such as wake and shocks between rotor(rotating blade) and stator (stationary blade). A conservativesliding BC without interpolation is developed to solve themoving rotor in the rotating frame and the stationary bladesin the fixed frame. The relations between the moving frameand the fixed frame are used for the information exchange.
ρ
ρUρVr
ρ(Wθ + rRo)ρe+ρVθrRo
ρν
Fixed
=
ρ
ρUρVrρWθρeρν
Moving
(15)
The conservative variables ρ,ρU,ρVr,ρVθ, ρe, and ρνare exchanged dynamically when the moving domains slideand are updated in every physical time step. Since the slidingBC with the ghost cell approach can ensure the boundarycells to be solved in the same manner as the inner domain,it hence can capture the interactive effects between the rotorand the stator.
The condition for this sliding BC to avoid interpolationacross the sliding BC is to use a one-to-one matched grid atthe interface. Two domains at the interface have to have thesame mesh size and also the grid points should be evenly dis-tributed circumferentially. This condition can be always sat-isfied if it is fully annulus calculation. If it is for a sector ofthe annulus, a geometrically periodic sector should be usedfirst if available. In this case, the grid size of the interfacedisk in the rotor circumferential direction can be found bythe greatest common factor(GCF). For example, if we havea compressor with the number of IGV 56 and the number
4 Copyright © 2011 by ASME

5 CIRCUMFERENTIAL FOURIER PHASE-LAGGED BC 5
of rotor 35, on can reduce the full annulus to 1/7th annuluswith 8 IGV blades and 5 rotor blades that satisfies the geom-etry periodicity. Then, the GCF is 40 as 5 multiples per IGVblade and 8 multiples per rotor blade can meet the matchingcondition for both domains. In case a geometric periodicityfor a sector of the full annulus does not exist, a sector be-ing closest to a geometric periodicity may be used based onthe best judgement. When the rotating blades are moving,the mesh of the moving blades are moving with the blades.The one-to-one connection of the two grid points from thestationary blade to the moving blade at the sliding interfacewill remain on the same grid points when the circumferen-tial distance is small. When the circumferential distance ofthe two grid points is greater than half of the interval dueto the moving blades, the connection will switch to the nextgrid point so that all the grid points remain one-to-one con-nected without much mesh skewness. This process will keepbeing repeated in the rotor-stator sliding interface during thecalculation.
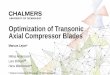
Fig. 3 illustrates algorithm of the sliding BC. Let therotor domain be rotated by two cells from the initial position.Then, the cell 1 to 4 on the rotor side and the cell 3 to 6 onthe stator side are matched and exchanged, while the cell 5and 6 of the rotor domain and the cell 1 and 2 of the statordomain have no cells to exchange. Therefore, we define theexchange array of those cells using a periodic rotation rule.For instance, the rotor cell 5 and 6 are rotated by the angle(ϕ)and are exchanged with the stator cell 1 and 2.
The rotating mesh may not be matched with the statordomain like staggered grid at the interface. Mostly the in-terpolation is necessary to find out the exact point for the in-formation exchange. However, it needs more computationalcost and storage. We employ the conservative cell exchangetechnique to reduce the computational efforts and to fullyconserve data exchange. The rotated mesh is located to theclosest cell of the counterpart domain. When ∆t is larger thanone circumferential grid cell spacing that has domain pass afew cells, likely more pseudo time steps are needed.
Sta
tor
Rot
or
1
2
3
4
6
5
2
2
3
4
5
6
1
2
3
4
5
6
SR0SR2
RR0 RR2RR1RR-1
1
2
1
1
1
2
3
4
6
5
5
6
5
6
SR1 SR-1
Rotor cellsto exchangewith Stator domain
Stator cellsto exchangewith Rotor domain
Ω
Rotor domain
Stator domain
Per
iodi
cce
ll
φ
Fig. 3: Rotor/Stator interface exchange algorithm
5 Circumferential Fourier Phase-lagged BCAn efficient circumferential phase-lagged boundary
condition is implemented for the multi-blade passage or sin-gle blade passage simulations. He and Denton [13] proposeda shape-correction method where the variation in fluid prop-erties over an oscillation cycle is decomposed into its Fouriercoefficients. This method needs much less computer storagecompared to the direct store method [12] because only thecoefficients are stored to update the variables.
Since the present solver uses the ghost cell approach atboundaries as sketched in Fig.4, the Cell GL(ghost cell of thelower periodic boundary) corresponds to the cell IU(innercell of the upper periodic boundary), and vice versa for thecell GU and the cell IL. One can write a Nth order timewiseFourier series for the conservative variable vector(Q) if therotor rotates from the lower to the upper boundary with thephase angle(ϕ) as
QGL(x,t) = QIU(x)+
∑Nn=1 [AnIU · sin[n(ωt +ϕ)]+BnIU · cos[n(ωt +ϕ)]] (16)
QGU(x,t) = QIL(x)+
∑Nn=1 [AnIL · sin[n(ωt −ϕ)]+BnIL · cos[n(ωt −ϕ)]] (17)
where
AnIL =ω2π
NP
∑j=1
Q(t)IL · sin(nωt)∆t (18)
AnIU =ω2π
NP
∑j=1
Q(t)IU · sin(nωt)∆t (19)
BnIL =ω2π
NP
∑j=1
Q(t)IL · cos(nωt)∆t (20)
BnIU =ω2π
NP
∑j=1
Q(t)IU · cos(nωt)∆t (21)
where the overbar denotes a time-averaged variables, ω(=2π/T ) is the blade vibration frequency(or blade passing fre-quency), n is the harmonic number, and NP(= T/∆t) is thenumber of steps taken over one oscillation cycle.
The Fourier coefficients are calculated over one time pe-riod using an approximate integral technique, the trapezoidalrule. This means these coefficients are lagged by one cy-
5 Copyright © 2011 by ASME

IU
IL
GU
GL
Single passagerotor domain
Inner cell of the lower periodic boundary
Inner cell of the upper periodic boundary
Ghost cell of the upper periodic boundary
Ghost cell of the lower periodic boundary
φ
r
r
Fig. 4: Sketch of Fourier phase lag domain
cle and no coefficient is available for the first cycle. Forthe first vibration cycle the upper and lower boundaries areconsidered periodic, and hence one can update the Fouriercoefficients over every time period from the second period.Notice that this phase lag BC implemented includes inher-ently the nonlinear interactions between the time-averagedflow and the unsteady disturbances [21]. Current phase lagBC has been validated using a full annulus flutter simulationfor NASA rotor 67 [22].
6 Other Boundary ConditionsIt is convenient for turbomachinery to express the
boundary conditions in Cylindrical system. Coordinatesmapping between the Cartesian (x,y,z) and Cylindricalsystem(x,θ,r) is given as
VxVθVr
=
uv · sinθ−w · cosθv · cosθ+w · sinθ
=
uv·z−w·y
rv·y+w·z
r
(22)
where u, v, and w are the relative velocity components inthe x, y, and z coordinate directions respectively. The ab-solute velocity components(Cx,Cθ,Cr) are related to the rel-ative velocity components(Vx,Vθ,Vr) using the rotor wheelspeed(rΩ) as
CxCθCr
=
VxVθ − rRo
Vr
(23)
At the IGV inlet, the radial distributions of total pres-sure Po, total temperature To, swirl angle α and pitch angle βare specified. The velocity is taken from the computationaldomain by the extrapolation in order to determine the rest ofvariables. First, we assume that the speed of sound a is con-stant at the inlet boundary. Then, the static temperature is
obtained by
Tb = To[1−γ−1
2(Ci
ao)2] (24)
where the subscripts i represents the first interior cell andsubscripts b indicates the first ghost cell of the boundary. Ciis the absolute velocity of the first interior cell and ao is thetotal speed of sound defined by
a2o
γ−1=
a2i
γ−1+
C2i
2(25)
Using the isentropic relations, the absolute velocity(Cb), thestatic pressure(pb) and density(ρb) are determined by
|Cb|=1
M∞
√2
γ−1(To −Tb) (26)
pb = Po
(TbTo
) γγ−1 (27)
ρb =pbγa2
b(28)
Then, the velocity components are decoupled and the con-servative variables are found as the following:
ρ
ρVxρVrρVθρe
b
=
ρb
ρbCm · cosβρbCm · sinβ
ρb(Cm · tanα− rRo)pb
(γ−1) +ρb2 (V 2
x +V 2r +V 2
θ − r2R2o)
(29)
At the stator outlet, the static pressure(pb) is specified inthe spanwise direction. The components of velocity(u,v,w)are extrapolated from the computational domain. Then, toupdate the density(ρb) by using the following isentropic re-lation.
ρb =
(pb
pi
) 1γ
ρi (30)
where pi is the static pressure and ρi is the density at thefirst interior cell of the outlet boundary. The total energy isupdated based on pb and ρb.
6 Copyright © 2011 by ASME

8 UNSTEADY SIMULATION 7
On the solid wall, the non-slip boundary condition is ap-plied to enforce mass flux going through the wall to be zero.The velocity components of the ghost cells are obtained bythe extrapolation between the moving wall velocity and inte-rior cells as follows:
Vb = 2Vw −Vi (31)
where Vb denotes the ghost cell velocity, Vi stands for thevelocity of 1st interior cell close to the wall, and Vw is wallmoving velocity given by Ω× r. Another option to save meshsize in our computation is to use the law of the wall. Wheny+ is between 11 and 300, the no slip condition is replacedby using the wall function.
u+ =1k
lny++B (32)
where k denotes Von Karman constant taken as 0.41, and Bdenotes a dimensionless constant corresponding to the wallroughness taken as 5.0. If the wall surface is η direction, thewall static pressure for the inviscid momentum equation canbe determined by the following manner.
∂p∂η = ρi√
η2x+η2
y+η2z
V 2θr (33)
If the wall surface is stationary, then the static pressure gra-dient across the wall boundary is set to zero. In addition, theadiabatic condition(∂T/∂η = 0) is used to impose zero heatflux through the wall.
7 Steady SimulationUsing the mixing plane, the single passage steady com-
putations are performed with CFL number of 1. In-phasecondition was applied at periodic boundary. The computa-tional mesh is presented in Fig. 5. The rotor tip clearanceof about 2.4% tip chord was given. The rotor tip is pre-cisely modeled with 21 grid points using a O-mesh block.The mesh of IGV/rotor/stator is partitioned to total 30 blocksfor parallel computation. The mesh around blade was con-structed by using the O-mesh. The H-mesh is used for thematched disk at interface of IGV/rotor/stator since the 1/7thannulus mesh used for the unsteady simulation is built bycopying the single passage mesh.
In Fig. 6, the absolute Mach number and static pressureat 50% span are shown. At the interface of IGV and rotor,and rotor and stator, the flow of the upstream outlet boundaryis mixed out to the downstream boundary. The discontinuityfrom the upstream to the downstream at the mixing planeis obvious. In reality the interaction between two adjacentblade rows in the relative rotation has significant effects onthe blade aerodynamic performance such as total pressureloss.
Fig. 7 shows the predicted radial profiles of total pres-sure ratio, total temperature ratio, absolute flow angle, andadiabatic efficiency at rotor exit. Compared to GE’s steadystate CFD prediction, all profiles show good agreement. Thecurrent results show slightly higher efficiency than GE’ssteady state CFD results over the 70% span.
8 Unsteady SimulationUnsteady simulation for 1/7th annulus of the multistage
compressor was performed over 2 rotor revolutions(2800physical time steps) with a pseudo time CFL of 1 using theFourier phase lag BC. The rotor blade passing frequency isused in the phase lag BC for all the blade rows. The numberof pseudo time steps within each physical time step is deter-mined by having the residual reduced by at least two ordersof magnitude, which usually is achieved within 40 iterations.Physical time step of 1/1400th rotor revolution is used. Toreduce CPU time, the flow field for the unsteady simulationis initialized using the mixing plane .
Fig. 8 shows the interface mesh system that enablesinformation exchange in the the fully conservative manner.1/7th annulus mesh was split into total 174 blocks for theparallel computation. In particular the grid points of 101 inthe blade-to-blade was determined to be able to resolve theblade wall boundary layers and wakes.
Fig. 9 illustrates an instant entropy contours, whichshows the wake propagation in the blade passage and crossblade rows.
Fig. 10 shows the instantaneous static pressure at 50%span. There are no shocks in the mid-span passage. Theinstantaneous pressure at the upstream interface of the ro-tor is measured during the unsteady simulation as shown inFig. 11. The static pressure fluctuates in the phase lockedfrequency due to IGV and rotor interaction.
Fig. 12 shows the predicted frequency at 50% span ofrotor upstream interface. Blade passing frequency (BPF) issharply captured.
Fig. 13 compares rotor blade surface pressure distribu-tions at 50%, 98% span respectively. The unsteady resultsare time averaged for 700 time steps. A significant differencebetween the steady and the unsteady simulation is showneven though the overall loading is similar, whereas the pre-dicted pressures are almost identical at 50% span. The un-steadiness generated by rotor/stator interaction becomes sig-nificant toward rotor tip. The reason may be that the mixingplane method cut off the shock propagation upstream andtip vortex propagation downstream. These two factors ul-timately affect the predicted tip loading distribution of theblade.
9 ConclusionsThis paper simulates the GE 1-1/2 stage compressor us-
ing steady state calculation with mixing plane boundary con-dition and unsteady calculation with sliding boundary condi-tions. The unsteady sliding boundary conditions are fullyconservative without interpolation by always having the grid
7 Copyright © 2011 by ASME

REFERENCES 8
point one-to-one connected. The steady state multistage sim-ulation using mixing plane BC agrees well with the resultsof GE’s steady state CFD prediction. The unsteady multi-stage simulation using sliding BC and phase lag BC predictsalmost identical loading distribution to the steady state sim-ulation at the mid-span, but have significant loading distri-bution difference at tip section. The reason may be that themixing plane method cut off the shock propagation upstreamand tip vortex propagation downstream. These two factorsultimately affect the predicted tip loading distribution of theblade.
AcknowledgementThe grants support from AFRL and the industrial part-
ners of GUIde Consortium, 10-AFRL-1024 and 09-GUIDE-1010, are acknowledged. We thank GE for approving pub-lishing the results. .
References[1] J.D. Denton, “The calculation of 3-D viscous flow
through multistage turbomachines,” Journal of Turbo-machinery, vol. 114, pp. 18–26, 1992.
[2] W.N. Dawes, “Toward improved throughflow capabil-ity: the use of 3-D viscous flow solvers in a multistageenvironment,” Journal of Turbomachinery, vol. 114,pp. 8–17, 1992.
[3] U.K. Singh, “A computation and comparison withmeasurements of transonic flow in an axial compres-sor stage with shock and boundary-layer interaction,”Journal of Engineering Gas Turbine Power, vol. 104,pp. 510–515, 1982.
[4] J.W. Barter, P.H. Vitt, and J.P. Chen, “Interaction ef-fects in a transonic turbine stage.” ASME paper 2000-GT-0376, Proceedings of ASME Turboexpo 2000, May8-11 2000, Munich Germany, 2000.
[5] G.A. Gerolymos and C. Hanisch, “Multistage three-dimensional Navier-Stokes computation of off-designoperation of a four-stage turbine.” Proc Instn Mech En-grs Vol 213 Part A, Third European Conference on Tur-bomachinery, March 1999, London UK.
[6] G. Fritch and M.B. Giles, “An asymptotic analysis ofmixing loss.” ASME paper 93-GT-345, 1993.
[7] M. Rai, “Three-dimensional Navier-Stokes simulationsof turbine rotor-stator interaction. I - Methodology ,”AIAA Journal of Propulsion and Power, vol. 5, pp. 305–311, 1989.
[8] M.B. Giles, “Stator/Rotor Interaction in a transonicTurbine,” AIAA Journal of Propulsion and Power,vol. 6, pp. 621–627, 1990.
[9] L. He, “Three-dimensional unsteady Navier-Stokesanalysis of stator-rotor interaction in axial flow tur-bines,” Proceedings of the Institution of mechanical En-gineers, Part A: Journal of Power and Energy, vol. 214,pp. 13–22, 2000.
[10] A. Ruprecht, C. Bauer, C. Gentner, and G. Lein, “Paral-lel Computation of Stator-Rotor Interaction in an Axial
Turbine.” ASME PVP Conference, CFD Symposium,Boston, 1999.
[11] J.P. Chen, and J.W. Barter, “ Comparison of time-accurate calculations for the unsteady interaction in tur-bomachinery stage.” AIAA Paper 98-3292, 1998.
[12] J.I. Erods, E. Alzner, and W. McNally, “Numeircal so-lution of periodic transonic flow through a fan stage,”AIAA Journal, vol. 15, pp. 1559–68, Nov. 2004.
[13] L. He, and J.D. Denton, “Three-dimensional timemarching inviscid and viscous solutions for unsteadyflows around vibrating baldes,” Journal of Turboma-chinery, vol. 116, pp. 469–476, 1994.
[14] Zha, G.C., Shen, Y.Q. and Wang, B.Y., “An improvedlow diffusion E-CUSP upwind scheme ,” Journal ofComputer and Fluids, vol. 48, pp. 214–220, Sep. 2011.
[15] G.C. Zha, Y.Q. Shen, and B.Y. Wang, “Calculationof Transonic Flows Using WENO Method with aLow Diffusion E-CUSP Upwind Scheme.” AIAA Pa-per 2008-0745, 46th AIAA Aerospace Sciences Meet-ing, Reno, NV, Jan. 2008.
[16] Y.Q. Shen, B.Y. Wang, and G.C. Zha, “Implicit WENOScheme and High Order Viscous Formulas for Com-pressible Flows .” AIAA Paper 2007-4431, 2007.
[17] B. Wang, Z. Hu, and G. Zha, “A General Sub-Domain Boundary Mapping Procedure For StructuredGrid CFD Parallel Computation,” AIAA Journal ofAerospace Computing, Information, and Communica-tion, vol. 5, pp. 425–447, 2008.
[18] P.R. Spalart, W.H. Jou, M. Strelets, and S.R. Allmaras,“Comments on the Feasibility of LES for Wings,and on a Hybrid RANS/LES Approach.” Advances inDNS/LES, 1st AFOSR Int. Conf. on DNS/LES, Grey-den Press, Columbus, H., Aug. 4-8, 1997.
[19] P.R. Spalart, and S.R. Allmaras, “A One-equation Tur-bulence Model for Aerodynamic Flows.” AIAA-92-0439, 1992.
[20] A. Jameson, “Time Dependent Calculations UsingMultigrid with Applications to Unsteady Flows PastAirfoils and Wings.” AIAA Paper 91-1596, 1991.
[21] H. D Li, and L. He, “Blade Aerodynamic DampingVaraition With Rotor-Stator Gap: A ComputationalStudy Using sinlge-Passage Approach,” Journal of Tur-bomachinery, vol. 127, pp. 573–578, Jul. 2005.
[22] H.-S. Im, and G.-C. Zha, “ Flutter Prediction ofa Transonic Rotor Using a Phase-lagged BoundaryCondition.” submitted to 50th AIAA Aerospace Sci-ences Meeting including the New Horizons Forum andAerospace Exposition, Nashville, Tennessee, Jan 2012,2012.
8 Copyright © 2011 by ASME

Fig. 5: Single passage mesh for steady mixing planesimulation; IGV=121(around blade) × 51(normal to the
blade) × 71(spanwise), Rotor=201× 51× 71, Stator=121×51×71, tip block = 201×14×21
Fig. 6: Mach number and static pressure contour of 50%span predicted by the mixing plane simulation
Total pressure ratio
%sp
an
GE steady CFDMixing planeSliding BC (time average)
Total temperature ratio
%sp
an
GE steady CFDMixing planeSliding BC (time average)
Adiabatic efficiency
%sp
an
GE steady CFDMixing planeSliding BC (time average)
Adiabatic efficiency
%sp
an
GE steady CFDMixing planeSliding BC (time average)
Fig. 7: Predicted pitch-averaged spanwise profiles at rotorexit plane; total pressure, total temperature, absolute flow
angle, adiabatic efficiency9 Copyright © 2011 by ASME

Fig. 8: 1/7th annulus mesh with H-disk blocks atIGV/rotor/stator interface for the unsteady simulation
Fig. 9: Entropy at 50% span
Fig. 10: Static pressure at 50% span
Time
Nor
mal
ized
stat
icpr
essu
re
Fig. 11: Static pressure oscillation at the interface of therotor tip upstream
Frequency at 50% Span
Am
plitu
de
00
0.1
0.2
0.3
0.4
Blade Passing
Fig. 12: Predicted blade passing frequency at 50% span ofrotor upstream interface
X/L
No
rmal
ized
surf
ace
pres
sure
Mixing planeSliding BC (time average)
Rotor 98% span
X/L
No
rmal
ized
surf
ace
pres
sure
Mixing planeSliding BC (time average)
Rotor 50% span
Fig. 13: Distributions of rotor blade surface static pressureat 50% and 98% span
10 Copyright © 2011 by ASME