Embed Size (px)
Citation preview

E L S E V I E R Measurement 15 (1995) 235 244
Measurement
Simulation of flow meter calibration factors for various installation effects
Martin Holm a , , , Jacob Stang b, Jerker Delsing a
" Department of Heat and Power Engineering, Lund Institute of Technology, Lund, Sweden b Division of Heating and Ventilation, Norwegian Institute of Technology, Trondheim, Norway
Abstract
The determination of flow meter calibration factors has been made using a computer simulation approach. The proposed technique is based on computational fluid dynamics (CFD). The CFD tools were used to determine the flow field in a flow meter as developed by three different pipe configurations. These flow fields were used to determine the calibration factor for an ultrasonic flow meter. The results have been compared with calibration factors obtained by CFD using detailed LDV input boundary data, analytical calculations and experimental data. Tests were made for reference conditions of 100D straight-pipe and for single- and double-elbow pipe configurations using Reynolds numbers from 100 to 1t)0,000. For reference conditions good agreement is shown. For disturbed flow conditions the simulations well resembled the experimental data. However we find differences for transitional and swirl flows.
Keywords: Flow meter; Installation effects; Simulation
1. Introduction
The determination of flow meter installation effects is of great importance when accurate flow measurements are required. Many authors have investigated the topic during the last century as described in numerous publications, e.g. [ 1-4] .
Normally the installation effects for a certain flow meter are determined in laboratory flow rigs adapted to the task. This is a very costly and time consuming procedure. Further it is often not pos- sible to generalize the obtained results. A new technique pioneered by Halltunen and Lunta uses laser Doppler velocimetry (LDV) flow data to compute the influences of various flow profiles on electromagnetic and ultrasonic flow meters [ 5 -8 ] . This approach requires a theoretical model of the
* Corresponding author.
0263-2241/95./$09.50 © 1995 Elsevier Science B.V. All rights reserved SSDI 0263-2241 (95)0C,007-0
flow measuring technique. For many of the flow measurement techniques used today, such models are presented in the literature, e.g. [-9-11]. The approach by Halltunen and Lunta requires very detailed LDV data that are extremely expensive to produce. Full simulation of installation effects has so far only been tested on orifice meters. Numerical methods for prediction of geometry-related instal- lation effects on orifice meters have been developed by Langsholt and Thomassen [12] and Reader- Harris [ 13]. Thus if simulation technology can be applied to replace the need for LDV data for all types of flowmeters, clear advantages can be found.
By using commercially available C F D (computa- tional fluid dynamics) code and a theoretical model of our own ultrasonic flow meter we have been able to predict the calibration factor, often denoted k-factor, for the meter. The predicted k-factor was compared to k-factors obtained in three different ways:

236 M. Holm et al./Measurement 15 (1995) 235 244
- CFD using measured inlet boundary data; - analytical calculation; - measured data. All three cases used IOOD straight-pipe, single- or double-elbow out-of-plane piping configurations.
The results obtained show that computer simula- tions will become a feasible tool for the determina- tion of flow meter installation effects. Using this approach a software tool can be devised that may give a faster way to the determination of installa- tion effects for flow meters. In the future such a software tool can be a useful development tool for new flowmeters. It can also be used for customiza- tion of a general flow meter to any installation where basic information about pipe geometry is provided.
2. B a s i c concept
First we like to define the expression "flow meter installation effects" as the flow metering error caused by changes to the flow field present in the flow meter. This points to the basic problem of designing a flow meter that is independent of flow field effects. Here the basic phenomena of inter- action between flow meter and fluid flow are of great concern. These principles often lead to the introduction of a calibration factor to account for various fluid flow effects that are not directly reflected by the method used.
A general formulation of this is:
[-ffmeas = k'f(Utrue), ( 1 )
where f(Utrue) depends on the measurement method used and
k = k(u(x,y,z), v(x,y,z), w(x,y,z)) (2)
is the calibration factor. The basic concept for k-factor determination
applied in this paper is based on a prediction of the flow field in a flow meter using CFD. By applying that flow field on a suitable model of the flow meter it is possible to predict the flow meter reading. Here we adapt this approach to an ultrasonic sing-around flow meter for which the following model for the interaction between meter and fluid flow can be used. Assuming a Cartesian
co-ordinate system as in Fig. 1 the mean flow velocity becomes:
. . . . = k(u(x,y,z), v(x,y,z)) ~ - , (3)
where k(u(x,y,z), v(x,y,z)) is the three-dimensional k-factor, L is the transducer distance, ~t the sound- fluid interaction angle and t 1 and t2 are the sing- around periods in the downstream and upstream direction respectively. For ultrasonic flow meters the k-factor will only depend on velocities parallel to the sound path. In Fig. 1 it can be seen that only the components of u and v will contribute to this. Velocities perpendicular to the sound path will not contribute to flow velocity measurement.
To determine k(u,v) we need information about the flow field inside the meter. This is obtained using CFD. To impose the influence of certain pipe geometries in front of the meter the flow field at the inlet of the flow meter has to be predicted to a sufficient accuracy. The disturbed flow field can be predicted by including the disturbing pipe work into the CFD computations. Here the computation has to be made through a sufficient portion of the upstream piping such that the resulting flow field inside the meter is not affected by the inlet bound- ary conditions to the computational domain.
3. E x p e r i m e n t s , ca l cu la t ions and s i m u l a t i o n s
The feasibility of the above described approach to determine the flow meter k-factor were tested against data obtained using CFD with LDV meas- urement inlet boundary data, analytical k-factors and experimentally obtained k-factors for our ultrasonic flow meter. The different approaches are summarized in Table 1. The different installations
i x,u d
! I Sound path Measurement @ plan y,v
Fig. 1. Basic flow meter configuration with indication of co-ordinate system x, y, velocity components u, v, sound path length L, and pipe and beam dimensions b, d.

M. Holm et al./Measurement 15 (1995) 235-244 237
Table 1 Methods used to obtain k-factors
Approach Re n u m b e r Configuration
Analytical 100, 2,000-100,000 100D Experimental, air 2,000 12,000 100D, SE, DE Experimental, water 2,000, 100,000 100D CFD using LDV 2,500 10,000 SE, DE input data Complete CFD 2,500 100,000 100D, SE, DE calculation
tested were an ideal installation using 100D straight pipe (100D), a single elbow (SE) and a double elbow (DE) out of plane. Tests were per- formed for Reynolds numbers from 100 to 100,000.
We have compared the numerically calculated k-factors obtained with analytically calculated k- factors based on power-law flow profiles for ideal pipe flow using Reynolds numbers from 100 to 100,000. Experimentally determined k-factors were obtained using our own ultrasonic flow meter. For the water meter the k-factor was determined experi- mentally for Re from 2,000 to 100,000 using a 100D straight-pipe configuration. With air the k-factor was measured using 100D straight- pipe, single-elbow and double-elbow configura- tions. Due to limited laboratory conditions only Reynolds numbers from 2,500 to 12,000 were mea- sured. However this well resembles the situation for domestic gas flow meters.
3.1. Analytical calculations
Using fully developed pipe flow it is possible to analytically calculate the k-factor. For simple pipe geometries theoretical flow profile models can be found in the literature. We decided on a velocity profile model made up from the equation of the wall plus a velocity defect equation. This will correct the profile in the core region to better reflect available experimental data. According to 1-14-16] the equations of the wall l(r) and the wake function w(r) can be expressed as:
l(r)= U,-2.5.(y+) + 5, (4)
wlr, = U,~ (sin ( r t ( ~ - R ) ) + 1 ) , (5)
where U. is the friction velocity, y+ is the dimen- sionless wall distance, r is the pipe radius co-ordinate and R is the pipe radius. Superposition of Eqs. (4) and (5) gives the turbulent flow profile:
U T (r) = l(r) + w(r). (6)
For laminar flow the standard parabolic expression is used:
UL (r)=Umax ( 1 - - ~ ) , (7)
where Umax is the maximum velocity in the laminar flow. These profiles are shown in Fig. 2.
The ultrasonic flow meters integrate the flow profile over the volume of the sound beam. For a diagonal meter configuration the sound beam will form a tube across the pipe, cf. Fig. 1. In the axial direction the sound beam cuts out an elliptic volume V of the flow when it travels across the pipe. Obviously this volume depends on the sound beam radius b, the pipe diameter d and the angle ~.
Using the above given velocity profiles the mean velocity sensed by the sound beam can be expressed as:
_ 1 ggg Uc,,(b,d) = V(~-~,d~ I I I u(r)dV. (8)
V(b,d)
To calculate the k-factor the mean velocity given by Eq. (8) should be compared with the true mean velocity. Here it is obtained from the given
0,0 0.5 rift
Fig. 2. Dimensionless velocity profiles for turbulent and laminar flow and the position of the mean flow velocity.

238 M. Holm et al./Measurement 15 (1995) 235..244
Reynolds number by:
R e . v Utrue- d (9)
Now the k-factor for a diagonal ultrasonic flow meter can be expressed as a function of the sound beam radius b and the pipe diameter:
W~ d, i I iou(r) d V vcb,a~ (10) k(b,d) = ~--~true- Re.v/d
By varying the sound beam radius b to pipe radius ratio the k-factor function for an arbitrary meter can be determined. This analytical model has been used to calculate the k-factor for both laminar flow (Re=100) and for turbulent flow (Re= 2,500-100,000). The results from the analytical calculations are in good agreement with those of Lynnworth and Lynnworth [8] .
3.2. CFD simulations
For the CFD calculations we used the commer- cial software package FLOW30. This program is based on the finite difference method and applies a body fitted co-ordinate system with the possi- bility of glueing together an arbitrary number of topological rectangular grids. The applied turbu- lence model is the k-e model. The wall function for the laminar case is a quadratic function in the boundary layer while in the turbulent case it is a linear function close to the wall and a logarithmic function further away. We have used the SIMPLEC 1-17] algorithm for the velocity-pressure coupling which is necessary to maintain the continuity troughout the iterations. The HYBRID [ 1 8 ] differ- encing scheme is used to model all the connective terms while the pressure is modelled with the central difference scheme. The value of t_Tsi~n depends of the diameter of the sound beam due to the non-linear flow profile shape. Of great impor- tance to the accuracy and convergence in the simulations is a good mesh design. The mesh used consists of two grids of different types glued to each other (Fig. 3). The outer grid is an O-grid and the inner grid is an H-grid. This combination
Fig. 3. Cross section of the mesh with 3 x 32 + 8 x 8 cells.
of the two mesh types is desired because of the need to have concentric cells in the boundary layer [19]. The present mesh consists of 32 cells in the radial radial direction and 3 cells in the tangential direction in the outer block and 8 cells in each direction in the inner block. This is done in an attempt to get the cell area as uniform as possible. Critical cells are the four corner points in the inner block who are further from a cubic form. The mean cell dimensions vary from 1.25 to 1.6 mm with a mean cell area of 2 mm 2 for the above cell configuration.
The transformation of the CFD output data to a numerical value for k(u,v) was obtained by a program that reads the output velocity data from FLOW3D and then calculates a mean velocity in the direction of the sound path. Here every grid node is weighted with its cell volume. The mean velocity is calculated using the following formula:
~(uj cos ~+vj sin a)Vj ~-~sim = J = 1 , ( 11 )
j = l
where uj and vj are local velocities obtained from the CFD output, cf. Fig. 1. The calibration factor k(u,v) can be obtained from the following formula:
[.7. COS C(
k(u,v)= Osim ' (12)
where /2 is the true mean volume flow velocity and tTsi m is the mean volume velocity in the direction of the sound path, the velocity that the sing-around ultrasonic flow meter would experi- ence, e is the angle between the sound beam and pipe axis.

M. Holm et al./Measurement 15 (1995) 235 244 239
3.2.1. CFD simulations with LDVinput data The flow meter inlet data for the single- and
double-elbow disturbance was obtained by direct laser Doppler velocimetry, (LDV) measurement across the inlet of a model of a sing-around flow meter. The LDV measurement set-up used a 300 mm long glass model of the flow meter, with an internal diameter of 20.4 mm and an angle of 30 ° between the sonic path and the main stream. The model was inserted in a pipe system with pump, cooler and a flow straightener to reduce swirl from the pump. Directly upstream of the flow meter model the flow disturbance was introduced.
In order to obtain reasonable spatial resolution near the wall of the tube refractive index matching was used. The refractive index matched fluid used was a mixture of ethanol and dibutylftalate [20]. For seeding we used metallic coated particles from TSI. The LDV system was a two-component Dantec BSA system connected to a PC.
By rotating the single-elbow disturbance we were able to obtain measurements of all three velocity components u, v and w. In total 73 data points were measured to map the flow pattern. Close to the wall the radial resolution was refined.
To adapt the measured data to the grid used by the C F D program the following interpolation algo- rithm was applied. For each computational grid point the four closest co-ordinates on a plane with measured velocity data were chosen and inter- polated using the following formula:
ui / 4 1 \ (13)
f r o m :
k = 1/2-(d2 Av//2 ~- w '2 ) , (14)
8 = cuk3/2/lm, ( 15 )
where c,--0.09 and I m = 0.27D. The boundary con- ditions at the outlet are a Neumann boundary, i.e. the normal derivative is zero. The simulations for the 100D straight pipe were done with a special routine in FLOW3D that continuously moves the solution at the outlet to the inlet until a fully developed solution is obtained. Thus the only inlet data that is required for this simulation is the mass flow.
3.2.2. Complete CFD simulation The more complex mesh used in the complete
C F D simulation is generated in much the same way as the straight mesh but the cross section is added to a parametric curve in space (Fig. 4).
A parametric curve can be formed by letting the vector r(t) sweep in space:
r(t)=(x(t) , y(t), z(t)). (16)
The derivative r'(t) forms the tangential vector to the curve, normal to the cross section, and gives the co-ordinate plane automatically the correct 9if' angle to the curve:
r'( t)=(x'( t), y'( t), z'( t)). (17)
For a straight tube r(t) with a distance R from the axis the equation becomes:
r(t) =(t, O, R), (18)
where t is an axial co-ordinate. For a circular tube
where k = 1 x 10 10 in order to avoid numerical problem when ri is close to zero.
The total grid consists of 87 planes in the configuration described in Section 3,2. The length of the calculation domain is 125 mm, where 85 mm is upstream and 40ram is downstream of the intersection between the pipe axis and the centre of the ultrasound beam.
The boundary conditions on the inlet for the single- and double-elbow cases are set according to our LDV measurements. The boundary condi- tions for the turbulence properties are calculated
r'(t) ~ //7
z ~ ¢ j . ~>)/cross section
Fig. 4. A cross sect ion of the mesh projected to a paramet r ic funct ion fo rming a curve 7.

240 M. Holm et al./Measurement 15 (1995) 235-244
r(t ) becomes:
r ( t )=( -R cos t, 0, R sin t), (19)
where t is the angle in radians. By combining the equations for astraight tube and a circular tube it is easy to form complex pipe configurations.
In these simulations we have limited ourselves to two types of pipe configurations, SE bend and DE bend; the pipe cross sections are described above. Cell dimensions of the mesh have been carefully calculated to be as equal as possible with the middle bend cell plane as the mean size.
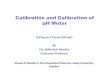
The computational mesh for the single-elbow bend has a straight inlet section of 30 planes 40.84 mm long (2D), a 90 ° bend, centre-line radius 13 mm, with 15 planes and a straight outlet section of 220 planes 299.50 mm long, cf. Fig. 5.
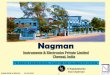
The DE mesh consists of a straight inlet section of 30 planes 40.84 mm long (2D), a 90 ° bend, radius 13 mm, with 15 planes, a straight section of 59 planes 78.96 mm long, a 90 ° bend, centre-line radius 13 mm, with 15 planes and a straight section of 220 planes 299.50 mm long, cf. Fig. 6.
The inlet condition consists of a fully developed velocity and pressure profile located approximately 2D before the inlet plane of the bend. The 30 cell plane (2D) inlet section is necessary because the pressure propagates upstream and thereby influ- ences the velocity field. Outlet conditions are mass
2D ~ 12.5D measurementpl~l Inflow
Fig. 5. SE mesh with approximate numbers of diameters.
flow boundary, Neumann boundary condition, i.e. all derivatives of the variables are zero at the tube outlet.
4. Results
The results are divided into to two groups: undisturbed (100D) and disturbed (SE, DE bends), cf. Table 2. The first group deals with the k-factor dependency on the sound beam diameter to pipe diameter ratio, and the second with the k-factor dependency on different methods of measurement and simulations. The second group deals with the k-factor dependency on Re number (2,000-12,000) and type of flow disturbance.
4.1. Undisturbed flows
For verification the simulated and analytical results were compared for simple fully developed both laminar and turbulent flow. By varying the sound beam diameter we where able to check the general performance of the simulations. Fig. 7 shows simulated and calculated data for different sound beam radius at Re 10,000 and 100,000. Here the difference in k-factor is within 1%.
In Fig. 8 similar results are shown for laminar flow and as expected the k-factor approaches 0.75 for a very thin sound beam. Since the sound beam
Table 2 Results from simulations
Installation CFD model Inlet data configuration
~ ~ m e a s u r e m e n t plan
Fig. 6. DE mesh with approximate numbers of diameters.
Undisturbed flow 4.1 100D Disturbed flow 4.2 Single elbow
4.2 Double elbow
4.3 Single elbow
4.3 Double elbow
Turbulent k-e FLOW3D profile
Laminar/Turbulent LDV/FLOW3D k-e Laminar/Turbulent LDV/FLOW3D k-e Laminar/Turbulent FLOW3D profile k e Laminar/Turbulent FLOW3D profile Be

M. Holm et al./Measurement 15 (1995) 235 244 241
J 096 !
: , _ - o - % Rel0OOOOalc.
092 ' ~ --<>-- Re100000 Calc.
I -C~ Re10000 Sire.
-~- Re100000 Sire.
09 ~ --- l I t 0.2 04 0.6 0 .8
b/d
Fig. 7. Simulated and analytically calculated k-factor for vary- ing sound beam to pipe diameter ratio for Re 10,000 and 100,000.
0.95
; ; s 0.9 / /
&
Sire.
I 0 0.2 0.4 0.6 0.8
b/d
Fig. 8. Simulated and analytical calculated k-factor for varying sound beam to pipe diameter ratio for Re 100.
is three-dimensional, the central regions of the flow will be overestimated for all real flows. Therefore the k-factor never reaches exactly 1. If an ideal plug flow is present, the k-factor will become equal to one. For small sound beam diameters the simu- lations deviate from the analytical solution since too few grid nodes were inside the boundaries of the sound beam.
In Fig. 9 the analytically calculated and the simulated k-factors are compared to measured data in water for Re 2,000-100,000. Here the pipe to sound beam ratio is fixed at 0.6. The agreement between simulated and calculated data is very good. For the transition from laminar to turbulence
1 . . . . . . . . . . . . . .
095 '
o.9 - / i , . . . . . . . . 7--- 7
0.s5 - - - I
0.8 - k - m e a s i
0.75 t~- _l o - k-calc
| - z ~ k-sire i 0 .7 i I - - - - _L .... , ~ - 4
0 20000 40000 60000 80000 100000
Reynolds number
Fig. 9. Simulated, analytical and measured k-factor for Reynolds numbers from 2,000 to 100,000. Sound beam to pipe diameter ratio was 0.6.
a slight deviation is found. This can be explained from the fact that wetted sound transducers were used. Thus cavities were present in front of the sound transducers. These will introduce a change in the flow field that is not accounted for in the simulations or the analytical calculations.
4.2. Disturbed f lows- -LDVdata as input data to CFD
Here the single-elbow and double-elbow config- urations introduce a change in the calibration of about - 1% compared to the reference case of the 100D straight pipe [4] . Due to the low Reynolds numbers (2,000-12,000) it is questionable which flow models should be used for the flow simula- tions. The LDV measurement indicates laminar flow below Re 2,500 for the single elbow. For higher Reynolds number rms values of 8-12% of axial velocity indicate modest turbulent flow for both configurations. For the single and double elbow we chose to use the laminar model for Re less than 3,000 and the k-~ turbulence model for higher Reynolds numbers. The k-factors for SE, DE and 100D experimentally obtained are shown in Figs. 10 and 11. The agreement between the simulated and the experimental k-factors is good.
4.3. Disturbed.flows--Complete C F D simulation
For the SE bend the difference between the complete CFD k-factors and measured k-factors

242 M. Holm et al./Measurement 15 (1995) 235 244
#
0.98
0.96
0.94
0.92
0.9
0.88
0.86
0.84
0.82
0.~ 0
<9
©
2000
o o o y
4000 6000
Reynolds number
- - SE-measure
---x-- 100D-measure
-[3- SE-LDV/F3Dturb
...c~- SE-LDV/F3DLam
SE-F3D/F3DTurb
-o-- SE-F3D/F3DLam
80;0 10000 12000
Fig. 10. Simulated k-factors for single elbow (SE); measured 100D k-factors are given for reference.
1
0.98
0.96
0.94
0.92 ¢.a
0.9
0.88
0.86
084
0.82
08
0,78 0
- - DE measure
DE LDWF3DTurb
- -~ 100D measure
-~ - DE-F3D/F3DTurb
--o- DE-LDV/F3DLam
DE-F3D/F3DLam n
2000 4000 6000 8000 10000 12000
Reynolds Number
Fig. ll. Simulated k-factors for double elbow (DE), measured 100D k-factors are given for reference.
are abou t + 1%. The difference in shape between the calculated and the measured curve are small. cf. Figs. 10 and 11. However the dip in the k-factor from the measured data does not appear in the simulated data. We have indicat ions that the k- factor in the measured data below Re 2,500 is due to reference meter failure. If the lower Reynolds
numbers , 2,500-3,000, are calculated laminar , a dip in the k-factor occurs but it is much lower than found experimentally.
In the DE data set there are only three data points in the complete C F D calculations. The difference between the complete C F D k-factor and measured k-factor levels is abou t + !%. Even with

M. Holm et al./Measurement 15 (1995) 235 244 243
the small number of poin ts ca lcula ted it can be seen tha t the difference in shape between the ca lcula ted and the measured curve is small , cf. Figs. 10 and 11.
A compar i son between the veloci ty profile ob ta ined from C F D calcula t ions and L D V meas- urements shows tha t the big difference is the b o u n d a r y layer. Here the C F D with the ~ e model no rma l ly predicts a too th ick b o u n d a r y layer [-21 ]. This will explain the posi t ive shift in the k-factor for the SE case.
In the D E case swirl is i n t roduced causing the flow field to rotate. The degree of this ro t a t ion has not been invest igated. However swirl are general ly not pred ic ted correct ly by the K - e mode l for heavy swirl [21] . F rom [ 4 ] it is known tha t ro ta t ing the sound pa th a r o u n d the pip axis will give shift in the k-factor of up to 3%. This indicate that a wrongly predic ted swirl can cause the k-factor shift shown for DE, cf. Fig. 1 1.
5. Discussion
The results show tha t the shift in ca l ib ra t ion due to the e lbows can be pred ic ted f rom the s imula ted data . Al though the turbulence mode l used in the C F D code in general is not very accura te for the Reynolds numbers used in this exper iment , the s imula ted k-factor resembles the shape of the ac tual measured ca l ib ra t ion curves r easonab ly well bo th for L D V / F 3 D and F 3 D / F 3 D data . The s imula t ion using L D V da t a as input general ly gives k-factors closer to the measured data .
The results achieved show tha t the software tool that has been tested for an u l t rasonic flow meter might be useful in the future for deve lopmen t for flow meter manufac ture rs as well as a for cus tomi- za t ion of flow meters for var ious ins ta l la t ions . The technique might be improved by employ ing bet ter turbulence models such as Reynolds Stress. Better theoret ica l models of the flow meter will also improve the s imulat ions.
Acknowledgements
The au thors like to express their g ra t i tude to the Nord ic Counci l of Minis ters for founding a
scholarsh ip for Jacob Sting. This project was sponsored by the Swedish Na t iona l Boa rd for Indus t r ia l and Technical Deve lopment . This work has received suppor t f rom the Norweg ian Supe rcompu t ing Commi t t ee ( T R U ) th rough a grant of compu t ing time.
References
[ I ] G.E. Mattingly and T.T. Yeh, Effects of pipe elbows and tube bundles on selected types of flowmeters, Flow Meas. lnstrum. 2 (January 1991) 4-13.
[2] J.E. Heritage, The performance of transit time ultrasonic flow meters under good and disturbed flow conditions, Flow Meas. lnstrum. 1 (October 1989) 24 30.
[3] P. H6jholt, Installation effects on single and dual beam ultrasonic flow meter, Int. Con/~ on Flow Measurement in the mid 80's, National Engineering Laboratory, East Kilbride, Glasgow, 9 12 June 1986.
[4] E. H~kansson and J. Delsing, Effects of flow disturbances on an ultrasonic gas flow meter, Flow Meas. lnstrum.
3(4) (1992) 227 -233. [5] E. Lunta and J. Halltunen, The effect of velocity profile
on electromagnetic flow meters, Sensors Actuators 16 (1989) 335 344.
[-6] J. Halltunen and E. Lunta, Effect of velocity profile on ultrasonic flow meters, IMEKO, 1989, pp. 40 51.
[7] J. Halltunen, Installation efl'ects on ultrasonic and electromagnetic flow meters: A model-based approach, Flow Meas. lnstrum. 1 (October 1990) 287 292.
[8] A.M. Lynnworth and L.C. Lynnworth, Calculated turbu- lent-flow meter factors for nondiametral paths used in ultrasonic flow meters, Trans. ASME 107 (1985) 44 48.
[9] J. G~itke, Bemerkungen zur Darstellung des Str6mungprofils und zum k-faktor im Zusammenhang mit der akustischen Volumestrommessung und Rohren, Mess. Steuern Regeln 32 (1989).
[10] J.A. Shercliff. The Theory ~ Electromagnetic Flow- measurement. Cambridge Engineering Series, Cambridge University Press, 1962.
[11] J. Hemp and G. Sultan, On the theory and performance of coriolis mass flow meters, Int. ('onl~ on Mass Flow Measurement, direct and indirect, IBC London, February 1989.
[12] M. Langsholt and D. Thomassen, The compulation of turbulent flow trough pipe fittings and the decay of the disturbed flow in a downstream straight pipe, Flow. Meas. Instrum. 2 (January 1991) 45 55.
~13] M.J. Reader-Harris, NEL, Computation of flow trough orifice plates downstream of rough pipe works, International Conference on Flow Measurement in the mid 80~, 9 12 June 1986.
[14] C.B. Millican,, A critical discussion of turbulent flow in channels and circular tubes, Proe. 5th Int. Congress on

244 M. Holm et al./Measurement 15 (1995) 235-244
Applied Mechanics, Cambridge, MA, Wiley, New York, 1938, pp. 386-392.
[15] D. Coles, The law of the wake in the turbulent boundary layer, J. Fluid Mech. 1 (1956) 191.
[16] F. White, Viscous Fluid Flow, McGraw-Hill, New York, 2nd edn., 1991.
[17] J.P. Van Doormal and G.D. Raithby, Enhancements of the SIMPLE method for predicting incopressible fluid flows, Numer. Heat Transfer 7 (1984) 147-163.
[18] V. Patankar Suhas, Numerical Heat Transfer and Fluid Flow, Hemisphere, 1980.
[19] E. Orbekk, Algebraic elliptic grid generation for CFD applications, Ph.D. Thesis 1994:182, HOG-rapport, ISBN 82-7119-613-8, 1994.
[20] M. Wessman, J. Klingmann and B. Nor6n, Experimental studies of confined turbulent swirling flows, 7th Int. Syrup. on Application of Laser Techniques to Fluid Mechanics, Vol. 1, 1994, pp. 19.3.1-7.
[21] M.A. Leschziner, Computational Fluid Dynamics '94, 5-8 September, 1994, pp. 33-46.