Embed Size (px)
Citation preview

University of California
Los Angeles
Singular Solutions and Pattern Formation inAggregation Equations
A dissertation submitted in partial satisfaction
of the requirements for the degree
Doctor of Philosophy in Mathematics
by
Hui Sun
2013

c� Copyright by
Hui Sun
2013

Abstract of the Dissertation
Singular Solutions and Pattern Formation inAggregation Equations
by
Hui Sun
Doctor of Philosophy in Mathematics
University of California, Los Angeles, 2013
Professor Andrea L. Bertozzi, Committee Chair, Chair
In this work, we study singular solutions and pattern formation in aggregation equations
and more general active scalar problems.
We derive a generalization of the Birkho↵-Rott equation to the case of active scalar prob-
lems with both gradient and divergence free structures. We present numerical simulations of
this model demonstrating how the gradient part and the divergence free part of K influence
each other and cause some nonlinear e↵ects. Examples include superfluids, classical fluids
and swarming models.
The rest of this thesis focuses on aggregation models with gradient flow structure. The
discrete version of the continuum aggregation equation is the kinematic equation xi
=
�mi
Pj 6=i
rU(|xi
� xj
|), 8 1 i N . For both discrete and continuum versions, we
use linear stability analysis of a ring equilibrium to classify the morphology of patterns
in two dimensions. Conditions are identified that assure the linear well-posedness of the
ring. In addition, weakly nonlinear theory and numerical simulations demonstrate how a
ring can bifurcate to more complex equilibria. Moreover, linear stability analysis of clusters
equilibrium patterns are also investigated in both two-dimensional and higher-dimensional
cases.
We then apply our stability results of ring patterns and clusters patterns to a family
ii

of exact collapsing similarity solutions to the aggregation equation with pairwise potential
U(r) = r�/�. It was previously observed that radially symmetric solutions are attracted to
a self-similar collapsing shell profile in infinite time for � > 2 in all dimensions. The stability
analysis for ring patterns and clusters patterns shows that the collapsing shell solution is
stable for 2 < � < 4, while always unstable and destabilizes into clusters that form a simplex
for � > 4. This holds in all spatial dimensions.
iii

The dissertation of Hui Sun is approved.
Je↵rey D. Eldredge
John B. Garnett
Russel E. Caflisch
Andrea L. Bertozzi, Committee Chair, Committee Chair
University of California, Los Angeles
2013
iv

To my family and friends
v

Table of Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 An Introduction to Aggregation Swarming Models . . . . . . . . . . . . . . . 1
1.2 Connections Between the Fluid Equations and Aggregation Problems . . . . 2
1.3 H-Stability and Singular Swarming Patterns . . . . . . . . . . . . . . . . . . 5
1.4 Finite Time Blowup and Self Similar Collapsing . . . . . . . . . . . . . . . . 8
1.4.1 Finite Time Blowup for the Discrete Case . . . . . . . . . . . . . . . 9
1.4.2 Finite Time Blowup for the Continuum Case . . . . . . . . . . . . . . 11
1.4.3 Self-Similar Collapsing . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5 Outline for the Rest of the Thesis . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Generalized Birkho↵-Rott Equation for 2D Active Scalar Equations . . 14
2.1 Derivation of the Generalized Birkho↵-Rott Equation . . . . . . . . . . . . . 14
2.2 Numerical Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Convergence Study . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.3 Verification of Method . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Kernels of Mixed Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Example 1: Superfluids . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.2 Biological Swarming . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Stability of Ring Patterns in R2 . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.1 Discrete and Continuum Models . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Linear Stability of the Ring Solution in R2 . . . . . . . . . . . . . . . . . . . 43
vi

3.2.1 with Discrete Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2.2 with Continuum Model . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.3 Numerical Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 Linear Stability of the Shell Solution in Rd . . . . . . . . . . . . . . . . . . . 49
3.4 Weakly Nonlinear Analysis: Low Mode Bifurcations . . . . . . . . . . . . . . 51
3.4.1 Numerical Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Stability of Cluster Patterns in Rd . . . . . . . . . . . . . . . . . . . . . . . . 57
4.1 Stability of Clusters in R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2 Stability of Clusters in General Space Dimensions . . . . . . . . . . . . . . . 60
5 Stability and Clustering of Self-Similar Solutions to Aggregation Equa-
tions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.1 Similarity Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2 Linear Stability of Shell Solutions . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2.1 Linear Stability of Shell Solution in Rd . . . . . . . . . . . . . . . . . 69
5.2.2 Particle Simulations on Shell Stability . . . . . . . . . . . . . . . . . 70
5.3 Cluster Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.3.1 Stability of Clusters in R2 . . . . . . . . . . . . . . . . . . . . . . . . 75
5.3.2 Numerical Simulations of Cluster Stability in R2 . . . . . . . . . . . . 75
5.3.3 Stability of Clusters in Rd . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3.4 Numerical Simulations on Simplex Configuration . . . . . . . . . . . 77
5.4 Appendix of Chapter 5: Proof of Inequality (5.22) . . . . . . . . . . . . . . . 79
6 Conclusion and Future Works . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
vii

References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
viii

List of Figures
1.1 Evolution of an irregular swarm patch under model (1.3), from top to bot-
tom, left to right, t = 0, 1, 2, 3, 7, 10. Reprent of C. M. Topaz and A. L.
Bertozzi, “ Swarming patterns in a two-dimensional kinematic model for bi-
ological groups” [TB], SIAM Journal on Applied Mathematics, Vol. 65, pp.
152-174, Copyright (2004) by SIAM. . . . . . . . . . . . . . . . . . . . . . . 3
1.2 H-stability diagram of Morse Potential. Reprent from M.R. D’Orsogna, Y.L.
Chuang, A.L. Bertozzi and L.S. Chayes, “Self-propelled particles with soft-
core interactions: patterns, stability and collapse” [DCBC], Physical Review
Letters, Vol. 96, 104302, Copyright (2006) by the American Physical Society. 6
1.3 Snapshots of swarms for di↵erent choices of C and l, resulting in di↵erent
kinds of patterns, including mill, clump, ring clump, and ring. Reprent from
M.R. D’Orsogna, Y.L. Chuang, A.L. Bertozzi and L.S. Chayes, “Self-propelled
particles with soft-core interactions: patterns, stability and collapse” [DCBC],
Physical Review Letters, Vol. 96, 104302, Copyright (2006) by the American
Physical Society. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Phase Diagram for the first order model. Reprent from Y.-L. Chuang, Y. R.
Huang, M. R. D’Orsogna, and A. L. Bertozzi, “Multi-vehicle flocking: scalabil-
ity of cooperative control algorithms using pairwise potentials” [CHDB], IEEE
International Conference on Robotics and Automation, 2292-2299, c�2007
IEEE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 The initial condition for the elliptically loaded example ( dashed line) and
the simulated fuselage flap configuration example (solid line). Figure (a) is a
plot of the initial circulation against ↵, and Figure (b) is a plot of the initial
density P against ↵. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
ix

2.2 The numerical solution at t = 0, 1, 2, 4 for the elliptically loaded wing example
using equations (2.8), (2.9) with (2.13). We take � = 0.05, �t=0.01, and we
use adaptive mesh refinement. . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 The numerical solution for the simulated fuselage flap configuration example
using equations (2.8) and (2.9). We take � = 0.1, �t=0.01, and we use
adaptive mesh refinement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 The numerical solution for the periodic perturbed ring example using equa-
tions (2.8), (2.9), with (2.13). We take � = 0.05, �t = 0.01, and we use
adaptive mesh refinement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5 The comparison of the numerical solution of the radius of rings. In the above
6 pictures, a, c and e are the plot of the radius using equations (2.18) and
(2.19); b, d and f are the plot of the radius computed using equations (2.8)
and (2.9). a and b are the solutions for the one ring case; c and d are the
solutions for the two rings case; e and f are the solutions for the three rings
case. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Plot the evolution of the vortex density sheet at t = 1 for several values of
✓ with initial conditions (2.23). From outside to inside ✓ = �⇡/2, �5⇡/12,
�⇡/3, �⇡/4,�⇡/6, �⇡/12, and 0. The asterisks represent the point that was
initially positioned at (1, 0). . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Plot of the rotation angles at t = 1 with respect to parameter ✓. The solid
curve corresponds to the initial condition of a perturbed ring. The dashed
curve corresponds to an initial condition of an unperturbed ring. . . . . . . . 27
2.8 The solution at time t=1.5 for four di↵erent values of ✓. The asterisk indicates
the position of the point initialized at (1, 0). . . . . . . . . . . . . . . . . . . 28
2.9 Subsequent enlargements of a particular roll-up in picture (d) from Figure 2.8
using 12530 grid points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
x

2.10 The solution to the periodic line problem at time t = 1, with initial condition
✏ sin(2⇡↵). (a). ✓ = �⇡/2, wind up number= 2.64; (b). ✓ = �5⇡/12, wind
up number= 5.04; (c). ✓ = �⇡/3, wind up number= 4.12; (d). ✓ = �⇡/4,wind up number= 1.60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.11 The solution to the linearized problem at time t = 1.3 with initial condition
✏1 sin(2⇡↵). The solid curve is for ✓ = �⇡/2; the dashed curve is for ✓ =
�5⇡/12; the dotted-dashed curve is for ✓ = �⇡/3. . . . . . . . . . . . . . . . 33
2.12 Time evolution of both the curve and density with ⌘(↵, 0) = 0.01 sin(2⇡↵)
with ✓ = �5⇡/12. This pure density perturbation leads to both a curvature
and density singularity formation. . . . . . . . . . . . . . . . . . . . . . . . . 34
2.13 The solution at time t=50 for �1 = 1 and varying values of �2. . . . . . . . . 36
2.14 The solution at time t=25 for �2 = 1 and varying values of �1. . . . . . . . . 37
2.15 By choosing parameters d and r, the spin direction of the outer arms are
di↵erent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.16 The initial condition as a circle, with the angular velocity it generates to a
point with distance ✏ on the right of the circle. . . . . . . . . . . . . . . . . 38
2.17 Integral I as a function of �. I(0.879)=0.000171 and I(0.878)=-0.003721,
indicating that the zero lies between 0.878 and 0.879. . . . . . . . . . . . . . 38
2.18 The solution at time t = 0, 3, 11, 15, with initial conditions (2.23) and (2.35)
with d = 1, r = 1, r = 0.2, �1 = 0.01, and �2 = 0.5 . . . . . . . . . . . . . . . 40
3.1 Simulation of (3.1) under interaction law (3.27) or (3.28) with certain param-
eter choices on a and b. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
xi

3.2 Simulation of (3.1) under interaction law (3.27) or (3.28) with certain param-
eter choices. Simulation size: N = 400 individuals. First column, t = 0;
Second column, t = 2; Third column, t = 50; Forth column, t = 1000. First
row, tanh kernel (3.27), with a = 10, b = 0.1; Second row, power law kernel
(3.28), with a = 0.5, b = 6; Third row, power law kernel (3.28), with a = 0.5,
b = 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 The most positive eigenvalue of M(m) as defined in (3.26), for modes m
ranging from 1 to 20. Left: tanh kernel (3.27), with a = 10, b = 0.1; Middle:
power law kernel (3.28), with a = 0.5, b = 6; Right: power law kernel (3.28),
with a = 0.5, b = 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Bifurcation diagram for interaction force (3.28), with p = 0.5. The solid curve
is calculated from Theorem 3.4.1. . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1 regular tetrahedron on sphere . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.1 Simulations of (5.12) and (5.23) with various m and �. The ✏? on the first
row indicates that ✏k = 0 and ✏? = r0/100 for initial condition; the ✏k on the
second row indicates that ✏? = 0 and ✏k = r0/100 for initial condition. We
use N = 100 particles to perform the simulation and these structures have
varying radii from 0.35� 0.6. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.2 Simulations for time evolution of (5.12) and (5.23) with N = 100 particles
for m = 5(first row) and m = 7( second row), and � = 40. The initial
perturbation is tangential with ✏k = r0/100. The ⇤’s are the centers of mass. 72
xii

5.3 The eigenvalues of matrix M(m) given by (5.16) and (5.17), with respect to
di↵erent modes m. This plot is for two space dimensions, but for general
space dimensions the behavior has the same qualitative features. The solid
curves are for m even; while the dashed curves are for m odd. (a) plots the
bigger eigenvalue of the two; (b) is an enlargement of a long and thin region
in (a); (c) plots the smaller eigenvalue of the two. . . . . . . . . . . . . . . . 73
5.4 We plot the behavior of c?
and ckin (5.25) for various values of m. The
dashed curves are for m even, while the solid ones are for m odd. (a) plots the
tangential eigenvalues ckin (5.25); (b) an enlargement along the the �-axis
of (a); (c) plots the normal eigenvalues c?in (5.25). In (c), all the curves
except m = 2 intersect at � = 4 with value c?= �1/3. The curve for m = 3
intersects 0 at � = 8/3, indicating that mode 3 normal perturbation changes
stability at � = 8/3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.5 Numerical simulation of the m clusters problem, with m = 3, 4, 5, 6, and
� = 3, 5, 7, and 9, each hole starting with n = 20 particles with fixed-center
small random perturbation. (a) and (b) are the plot of the particles at time
⌧ = 50 and ⌧ = 10000 respectively. . . . . . . . . . . . . . . . . . . . . . . . 78
5.6 Numerical simulation of (5.12) and (5.13) with n = 150 random initial points
in Rd. Capital letters correspond to simulations done for � = 3 and lower case
letters correspond to � = 5. First Row: Figures (A1) and (a1) are the final
computed steady states in d = 3. Similarly for (B1), (b1) in d = 4 though
the plots are projected into R3 by taking the first three coordinates. (C1) and
(c1) are for d = 5 and are projections into R3 by also taking the first three
coordinates. Second Row: (A2), (a2), (B2), (b2), (C2), and (c2) are plots of
the corresponding probability distributions of the normalized inner product
of any two points in the final steady state. . . . . . . . . . . . . . . . . . . . 79
xiii

List of Tables
2.1 Convergence rate in time and space. . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Ring collapsing time prediction . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Table of wind up numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Table of wind up numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1 Summary of the stability of Sd�1 with respect to the power � and mode m. . 71
5.2 Stability table for center of mass of clusters, corresponding to the second kind
of instability. It is stable if and only if the eigenvalues of A(l) defined by
(5.26) are all nonpositive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3 Stability table for m clusters, combining both kinds of instabilities. It is stable
if and only if conditions 1 and 2 in Theorem 4.2.2 are satisfied. . . . . . . . 77
xiv

Acknowledgments
First and foremost, I would like to thank my advisor, Professor Andrea Bertozzi, for her
continuous guidance and generous support throughout my graduate studies at UCLA. She
has o↵ered me great help not only in academic research, but also in academic writing as well
as literature review. Besides, she has also encouraged me to attend many conferences and
meetings, which has greatly broaden my perspective. I feel very grateful to have her as my
Ph.D. advisor.
I am especially grateful to Professor David Uminsky at the University of San Francisco
and Professor Theodore Kolokolnikov at Dalhousie University, for their help and collabo-
ration on the research projects, and many detailed discussion, insightful suggestions, and
important contributions. Without them, this thesis would not exist. Professor Kolokolnikov
derived the linear stability analysis of the ring solutions in R2. I am also very thankful to
Dr. James VonBrecht at UCLA, who introduced me to the spherical packing problem, and
explained to me shell stability in a general dimension.
I would also like to thank many other professors for their help on various topics: Professor
Russel Caflisch and Dr. Mark Rosin on the stability analysis of the virtual cathode problem;
Professor Chris Anderson on Chebyshev grid discretization, implementation of multigrid al-
gorithms, MPI, subversion, etc.; Professor Joseph Teran on the Immersed Boundary Method,
implementation of linear elasticity in 2D and 3D, and finite element methods; Dr. Christoph
Brune on compressive sensing, optical flow estimation, and optimal control on flow estima-
tion.
I would also like to express my gratitude to the committee members for their time to
review my thesis.
In addition, I would like to thank the sta↵ in the Math department, especially Mrs.
Maggie Albert, Mrs. Martha Contreras, and Mrs. Babette Dalton, for their hearty help on
many detailed aspects of graduate life, and their everyday smiling faces.
Lastly, my special thanks go to Dr. Yanghong Huang, and Dr. Yao Yao, who have helped
xv

me in many practical ways.
xvi

Vita
1985 Born, Shaoxing, Zhejiang Province, China
2008 B.S. (Mathematics), Chinese University of Hong Kong
2010 M.A. (Mathematics), University of California, Los Angeles
Publications
T. Kolokolnikov, H. Sun, D. Uminsky, A. L. Bertozzi, Stability of Ring Patterns Arising
from Two- Dimensional Particle Interactions, Physical Review E., 84(1), 2011.
H. Sun, D. Uminsky, A. L. Bertozzi, A Generalized Birkho↵-Rott Equation for Two-
Dimensional Active Scalar Problems, SIAM J. on Applied Math., 72(1), 2012.
H. Sun, D. Uminsky, A. L. Bertozzi, Stability and Clustering of Self-Similar Solutions
of Aggregation Equations, J. Math. Phys., special issue: Incompressible Fluids, Turbulence
and Mixing, 53(11), 2012.
A. L. Bertozzi, J. Von Brecht, H. Sun, T. Kolokolnikov, D. Uminsky, Ring Patterns and
Their Bifurcations in the Model of Biological Swarms, Comm. Math. Sci., 2012, submit-
ted.
xvii

CHAPTER 1
Introduction
1.1 An Introduction to Aggregation Swarming Models
Aggregation swarming behavior is observed in nature, ranging from microscopic bacterial
colonies [DVM, VBDFFVM] to macroscopic fish schooling, locust swarming, animal flock-
ing [TT, MZDT, S4, EWG, R2, RB], as well as human crowd dynamics [HKM]. Typically
this kind of behavior exhibits certain kinds of patterns that can be modeled by pairwise
interaction laws, typically with long range attraction and short range repulsion. One rea-
sonable model for the aggregation swarming behavior is the second order kinetic model:
[DCBC, CDMBC]
dxi
dt= v
i
,
mi
dvi
dt= ↵v
i
� �|vi
|2vi
�X
j 6=i
rU(|xi
� xj
|), (1.1)
where each individual is labeled i, with position xi
, velocity vi
, and mass mi
. The terms
↵vi
and �|vi
|2vi
are the self-propulsion and drag, respectively, yielding to an equilibrium
velocityp↵/�. The pairwise potential U is a function on the positive real axis, having a
local minimum at some rc
> 0, with U 0(r) < 0 for r < rc
and U 0(r) > 0 for r > rc
thus
having long range attraction and short range repulsion. Another simplified model is the first
order kinematic model: [KSUB, VUKB, VU, KHP]
dxi
dt= �m
i
X
j 6=i
rU(|xi
� xj
|). (1.2)
This is a reduced model compared to the kinetic model (1.1), in the sense that only the
change of position instead of the change of velocity is considered. This simplified model
1

(1.2) is closely connected to the active scalar equation [C, TB, BCL]
@⇢
@t+r · (⇢v) = 0, v = r?N ⇤ ⇢+rG ⇤ ⇢, (1.3)
where ⇢ is the active scalar, typically the density of an underlying material. Using the Hodge
decomposition, the velocity field v is composed of a divergence free part r?N and a gradient
part rG. The active scalar equation (1.3) arises in problems of vortex dynamics [MB, Y],
quasi-geostrophic flow [CMT] and superfluids [DP]. Equation (1.3) is a continuum limit of
(1.2) when the number of particles approaches infinity. The case where we have both r?N
and rG nonzero for the active scalar equation (1.3) is also studied for aggregation swarming
patterns in [TB]. Adding di↵usion to (1.3), we get the Keller-Segel equation: [KS]
@⇢
@t+r · (⇢rc) = �⇢, ��c = ⇢, (1.4)
where ⇢ is the density of bacteria, and c is the density of the chemo-attractant. Here the
kernel G would be the Newtonian potential.
1.2 Connections Between the Fluid Equations and Aggregation
Problems
One of the interesting swarm patterns observed in nature is the two-dimensional vortex-like
ant mill [S4]. It is a spiral shape with shape edges and nearly uniform density, exhibiting
certain similarity to the vortex patches in fluid dynamics. In [TB], Topaz and Bertozzi has
proved that in one dimension, uniform density traveling band solutions satisfying (1.3) never
exist, unless the kernel N or G is periodic, which is not biologically meaningful because the
sensitivity of an individual usually decays with distance.
In the same paper, in two dimensional case, the spiral vortex solutions to (1.3) are con-
structed and verified numerically (see Figure 1.1). The authors consider the incompressible
kernel, i.e., with G = 0. The reason for that choice is that biological swarms are able to
move and evolve in shape while maintaining their constant density. Then they choose the
2

Figure 1.1: Evolution of an irregular swarm patch under model (1.3), from top to bottom,
left to right, t = 0, 1, 2, 3, 7, 10. Reprent of C. M. Topaz and A. L. Bertozzi, “ Swarming
patterns in a two-dimensional kinematic model for biological groups” [TB], SIAM Journal
on Applied Mathematics, Vol. 65, pp. 152-174, Copyright (2004) by SIAM.
kernel N to be Gaussian with width d
N(r) =1
d2e�
r2
d2 , (1.5)
so that by setting d ! 0, (1.3) may be written as
@⇢
@t+ ⇡r · (⇢r?⇢) = 0, (1.6)
whose density profile does not change because the motion is perpendicular to the density
gradient. By setting d ! 1, r?N = 0, (1.3) becomes ⇢t
= 0 again. The authors then
consider a solution of constant density over a compact supported domain, a swarming patch,
3

and apply Green’s formula to formulate the velocity at the boundary of the swarming patch
v(x) = ⇢0
Z
@⌦
N(|x� y|)t(y)ds(y), (1.7)
where ⇢0 is the constant density of the swarming patch, ⌦ is the domain of the patch, and
t(y) is the unit tangential vector at point y. Taking ↵ 2 [0, 2⇡] as a Lagrangian parameter
for the boundary @⌦, (1.7) can be written as
x(↵, t)
@t= ⇢0
Z
0
2⇡N(|x(↵, t)� x(↵0, t)|)x↵
(↵0, t)d↵0, (1.8)
where by setting N(r) = log(r), it represents the vortex patch equation in the incompressible
inviscid fluids. Numerical simulation of (1.3) withG = 0, N given by (1.5), and initial density
uniform over an irregular domain results in swarming patches that are observed in bacteria,
fish, ants, etc. [BCCVG, OMB, PE, RNSL, S4]
The simulations illustrate the similarity between vortex patches in incompressible inviscid
fluids and swarm patches, which both exhibit rotational motion with long filaments. This
motivates our study for swarming sheets, which is analogous to vortex sheets. A vortex
sheet is a co-dimensional one sheet in surrounding fluid, where the velocity is discontinuous.
Unlike vortex patch, where vorticity is bounded pointwisely, a vortex sheet has vorticity
concentrated as a measure. Whereas the swarming sheet has individuals collapsing on a co-
dimensional one sheet, resulting a singular density concentrated as a measure. The swarming
sheet is studied in detail in chapter 2.
The formation of the singular swarming patterns, for example, solutions concentrated
on curves and clusters, although not observed in biological swarms, still have an applica-
tion in artificial swarms. This kind of phenomenon has introduced the topic of stability
prediction with respect to size. If a well-defined spacing among individuals persists, usually
swarming size increases with particle number, in a crystallization way. However, sometimes,
the size collapses as the number of individuals increases. In [DCBC, CDMBC], the authors
apply fundamental principles from thermodynamics, H-stability, to prediction the stability
of swarms, in regards to the possible collapse as the number of individuals increases.
4

1.3 H-Stability and Singular Swarming Patterns
In [DCBC, CDMBC], the authors use the H-stability criterion to analyze the first order
model (1.1),
dxi
dt= v
i
,
mi
dvi
dt= ↵v
i
� �|vi
|2vi
�X
j 6=i
rU(|xi
� xj
|),
with a pairwise interaction potential given by the generalized Morse potential as
U(r) = Cr
e�r/lr � Ca
e�r/la , (1.9)
where lr
, la
represents the length scale of the repulsion and attraction, and Cr
, Ca
are the
strength of repulsion and attraction.
H-stability is a criterion from Thermodynamics that ensures a lower bound for the binding
potential energy per particle [O]. With this condition, the Hamiltonian is stable –– meaning
that the total energy is bounded proportional to the number of particles [DL]. Without
this condition, an infinite amount of energy will be released by collapsing the system. If we
let Uk(xi1 , . . . ,xik
) be the k-body interaction potential among xi1 , . . . ,xik
, the criterion of
H-stability is defined as:
Definition 1.3.1 (H-stability [R]). The isotropic pairwise interaction potential Uk’s are
H-stable if 9B � 0, such that
X
k�2
X
1i1<...<ikN
Uk(xi1 , . . . ,xik
) � �NB, (1.10)
8 N � 0 and 8 xi
2 Rd. The interaction potential Uk’s are called catastrophic if they do
not satisfy the H-stability criterion.
For a radially symmetric pairwise interaction potential U , many sub-criteria can be de-
duced [R]. Applying these sub-criteria to (1.1) with (1.9), the authors in [DCBC, CDMBC]
obtain a stability phase diagram in two dimensions, as is shown in Figure 1.2, with l = lr
/la
5

Figure 1.2: H-stability diagram of Morse Potential. Reprent from M.R. D’Orsogna, Y.L.
Chuang, A.L. Bertozzi and L.S. Chayes, “Self-propelled particles with soft-core interactions:
patterns, stability and collapse” [DCBC], Physical Review Letters, Vol. 96, 104302, Copy-
right (2006) by the American Physical Society.
and C = Cr
/Ca
. This diagram is obtained analytically, by examining the potential (1.9)
with the sub-criteria for H-stability as deduced in [R]. For details of the derivation of the
region that is H-stable or catastrophic, one may refer to [C2].
Figure 1.2 is divided into three main regions. Region V is repulsion dominant, and each
individual tends to escape from everyone else. Regions I, II, III, and IV are attraction
dominant regions, and are all catastrophic. Regions VI, VII are biologically relevant regions.
Among these regions, only regions V and VI are H-stable, with swarm patterns such as
coherent flocking or rigid-body rotation. However, in the remaining catastrophic regions,
interesting swarming patterns are observed, such as mill, clump, ring clump, ring, as plotted
6

in Figure 1.3. Whereas coherent flocking and milling are the most commonly observed animal
swarming patterns [PE, PVG, S4].
Figure 1.3: Snapshots of swarms for di↵erent choices of C and l, resulting in di↵erent kinds
of patterns, including mill, clump, ring clump, and ring. Reprent from M.R. D’Orsogna,
Y.L. Chuang, A.L. Bertozzi and L.S. Chayes, “Self-propelled particles with soft-core inter-
actions: patterns, stability and collapse” [DCBC], Physical Review Letters, Vol. 96, 104302,
Copyright (2006) by the American Physical Society.
In [CHDB], a simular stability analysis is carried out for the second order model (1.2),
with the same Morse potential (1.9). It is done through defining a Lyapunov function
and applying a weak maximum principle. The swarming patterns are classified into three
regimes: a collapsing state with all particles converging to the same point, a dispersive
state with particles dispersed into infinity, and a cohesive state with particles maintain fixed
relative distances. (see Figure 1.4).
Although H-stability predicts the scaling behavior of equilibrium configuration, never-
theless, the theory for symmetry breaking of the equilibrium configuration has not been in-
7
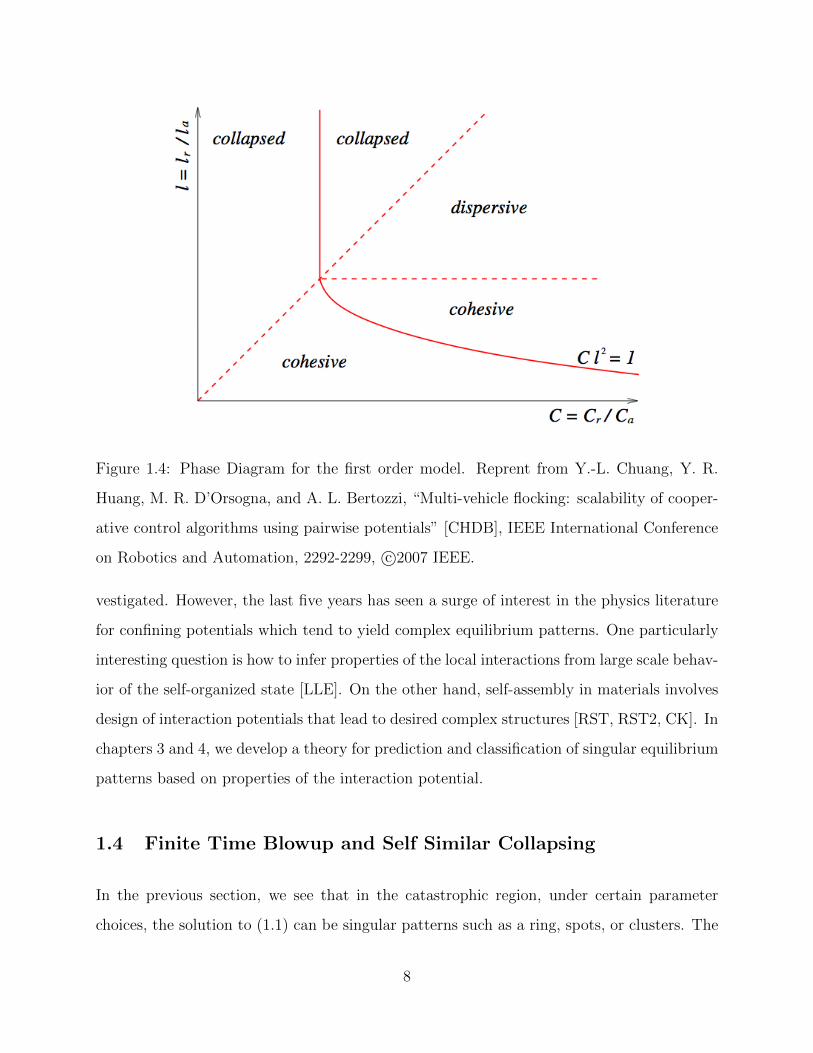
Figure 1.4: Phase Diagram for the first order model. Reprent from Y.-L. Chuang, Y. R.
Huang, M. R. D’Orsogna, and A. L. Bertozzi, “Multi-vehicle flocking: scalability of cooper-
ative control algorithms using pairwise potentials” [CHDB], IEEE International Conference
on Robotics and Automation, 2292-2299, c�2007 IEEE.
vestigated. However, the last five years has seen a surge of interest in the physics literature
for confining potentials which tend to yield complex equilibrium patterns. One particularly
interesting question is how to infer properties of the local interactions from large scale behav-
ior of the self-organized state [LLE]. On the other hand, self-assembly in materials involves
design of interaction potentials that lead to desired complex structures [RST, RST2, CK]. In
chapters 3 and 4, we develop a theory for prediction and classification of singular equilibrium
patterns based on properties of the interaction potential.
1.4 Finite Time Blowup and Self Similar Collapsing
In the previous section, we see that in the catastrophic region, under certain parameter
choices, the solution to (1.1) can be singular patterns such as a ring, spots, or clusters. The
8

formation of these kinds of singular patterns is related to blowup properties for aggregation
equations.
Recently, the finite time blow up problem of (1.3) with purely potential flow, i.e. N = 0,
has drawn much attention. The existence and uniqueness of solutions for rough initial data
and singular potential G has been proven for both one dimension [BV, BD] and n space
dimensions [L2]. Finite-time blow-up of solutions under rotationally symmetric kernels with
a Lipschitz point at the origin is also known [BL, BB]. For weak measure solutions the well-
posedness theory, uniqueness, and global existence has been recently explored [CDFLS, VB].
Furthermore, an Osgood condition on the kernel which is a necessary and su�cient condition
for infinite time blow up has also been derived [BL2, BCL].
The Osgood condition
Z 1
0
1
G0(r)dr = 1, (1.11)
is a necessary and su�cient condition for global existence of a bounded solution. If it is not
satisfied, i.e.
Z 1
0
1
G0(r)dr < 1, (1.12)
the solution blows up in finite time. Moreover, the bound on blowup time depends only on
the radius of the support of the initial data and the total mass of the solution.
The details of the blowup theorem with Osgood condition is described in the subsections
1.4.1 and 1.4.2.
1.4.1 Finite Time Blowup for the Discrete Case
In this case, one consider a particle system xi
2 Rd, with 1 i N , described by the
kinematic model (1.2). Assuming the center of mass at 0, and define
R(t) := max1jn
|xj
| = |xi
|, (1.13)
9

where xi
is the furthest particle from the center of mass. Then we have
d
dtR(t)2 = 2x
i
· dxi
dt= �2
X
j 6=i
mj
(xi
� xj
) · xi
|xi
� xj
| U 0(|xi
� xj
|). (1.14)
Since xi
is the furthest particle from the center of mass, we have (xi
� xj
) · xi
> 0, and
|(xi
� xj
)| < 2R. With the assumption that
U 0(r)
ris non-increasing for r > 0, (1.15)
we have
d
dtR(t)2 �U 0(2R(t))
R(t)
X
j 6=i
mj
(xi
� xj
) · xi
. (1.16)
Since the center of mass is at 0, we haveP
j 6=i
mj
(xi
� xj
) · xi
= MR(t)2, and hence
d
dtR(t) �M
2U 0(2R(t)). (1.17)
Since d
dt
R(t) 0 and U 0(2R(t)) � 0, with initial condition R(t = 0) = R0, we have
2
M
ZR0
0
1
U 0(2R)dR � �
ZR0
0
dt
dRdR = T ⇤, (1.18)
where T ⇤ is the blowup time. Thus, when the Osgood condition is not satisfied, we have
finite time blowup for the discrete system (1.2). The complete argument for the discrete
case is stated rigorously in the following theorem:
Theorem 1.4.1 (Collapse of the ODEs [BCL]). Consider the ODE system (1.2) satisfying
U(r)/r monotone decreasing, with U(r) defined and non-negative on (0,1). If U satisfies
the Osgood condition (1.11) then there exists a unique global-in-time forward solution with
no collisions, in which the particles converge to their center of mass in infinite time. If U
satisfies the non-Osgood condition (1.12) then there exists a unique global-in-time forward
solution with collisions, in which the particles eventually all merge at their center of mass
after finite time. In the latter case, for a given potential, an upper bound on the merger time
is a function of the radius of support of the initial data and the total mass only.
10

1.4.2 Finite Time Blowup for the Continuum Case
For the continuum case, the density is governed by (1.3)
@⇢
@t+r · (⇢v) = 0, v = r?N ⇤ ⇢+rG ⇤ ⇢,
in Rd, with N = 0. Then computing the divergence, we have
@⇢
@t+ v ·r⇢ = �⇢ div(rG ⇤ ⇢), (1.19)
which tells us that along characteristics, ⇢ is amplified by �G ⇤ ⇢. For special kind of kernel
G 2 C2, we have that
d
dtk⇢k
L
1 k�G ⇤ ⇢kL
1k⇢kL
1 (1.20)
k�GkL
1k⇢kL
1k⇢kL
1 . (1.21)
This provides an upper bound for the k⇢L
1k through Gronwall’s lemma. For potentials
satisfying Osgood condition (1.11), Bertozzi et. al. obtain the global in time L1 theorem.
Theorem 1.4.2 (Global-in time L1 and infinite time blowup for Osgood potentials [BCL]).
Consider (1.3) with the potentials N = 0 and G radially symmetric. Assume G00(r) > 0 and
that G(r)/r monotone decreasing in r. Then on the interval of existence (0, T ⇤)
d
dtk⇢k�1/d
L
1 � �C(d,M)G0(M1/dk⇢k�1/dL
1 ) (1.22)
holds. As a consequence, if G satisfies the Osgood condition (1.11) then for any compactly
supported non-negative L1 solution of the aggregation equation stays bounded for all time
and converges as t ! 1 to a Dirac mass of size M located at its center of mass cM
.
Furthermore, for potentials satisfying non-Osgood condition (1.12), Bertozzi et. al. [BCL]
derive a theorem for radially symmetric solutions.
Theorem 1.4.3 (Blow-up: radial case [BCL]). Consider equation (1.3) where the potential
N = 0 and G radially symmetric. Assume that G0(r) � 0 with G0(r) > 0 for r > 0,
11

and 9� > 0, such that G0 is monotone on [0, �). Also assume that G satisfies non-Osgood
condition (1.12). Suppose the initial data are radially symmetric, compactly supported and
bounded. Then there exists a finite time T ⇤ such that the unique weak solution ⇢(x, t) of
(1.3) satisfies
limt!T
⇤sup0⌧<t
k⇢(., ⌧)kL
q = +1 (1.23)
for all q � 2 (q > 2 for d = 2).
1.4.3 Self-Similar Collapsing
The above theorems provide a necessary and su�cient condition for finite time blowup of
solutions to kinematic model or aggregation equation,under certain conditions. Huang and
Bertozzi [HB, HB2] study the blowup behavior of (1.3) with power law kernels G(r) = r�/�.
The Osgood condition guarantees finite time blow-up for � < 2, and infinite time blow-up
for � > 2. Furthermore, it is well understood that the symmetric collapsing solutions exhibit
self similarity under this power law kernel. In chapters 4 and 5 we study the symmetry
breaking of such solutions.
1.5 Outline for the Rest of the Thesis
We explore the relation between fluids and active scalar equations in Chapter Two, with a
focus on sheet like solutions, in which the density ⇢ is concentrated on a codimension-one
surface. These are a generalization of vortex sheets to flows with both divergence free and
gradient components. In Chapter Three, we study the linear stability of ring solutions for
both the continuum model and discrete model in R2, as well as weakly nonlinear bifurcation
theory. In Chapter Four, we study the singular patterns that are formed with clusters, in
a general dimension. Furthermore, in Chapter Five, we apply our stability theory of the
singular patterns composed of shells and dots to a family of self-similar collapsing shell
solutions to the aggregation equation with power law kernel. We conclude and discuss
12

possible future research.
13

CHAPTER 2
Generalized Birkho↵-Rott Equation for 2D Active
Scalar Equations
If the kernel K of the active scalar equations
@⇢
@t+r · (⇢v) = 0, ⇢(x, 0) = ⇢0(x), (2.1)
v = K ⇤ ⇢ = r?N ⇤ ⇢+rG ⇤ ⇢, (2.2)
takes only the divergence free part r?N , whereas N(r) = ln |r|, equations (2.1) and (2.2)
becomes the vorticity equation for 2D inviscid incompressible fluids, with the active scalar
⇢ being the vorticity. The vorticity equation further reduces to Birkho↵-Rott equation
@X
@t=
1
2⇡P.V.
Z
S
(X(�, t)�X(�0, t))?
|X(�, t)�X(�0, t)|2 d�0, (2.3)
for those solutions with initial vorticity ⇢0 living on a curve, where the vortex sheet S has a
Lagrangian representation X(�, t), and circulation � is the integral of the vorticity ⇢ along
the sheet.
In this chapter, we generalize the Birkho↵-Rott equation for describing the 2D active
scalar equation when the solution is supported on 1D curve(s).
2.1 Derivation of the Generalized Birkho↵-Rott Equation
For solutions of (2.1) and (2.2) living on an 1D sheet S with a Lagrangian representation
X(↵) with ↵ 2 D, the active scalar ⇢ takes the form
⇢(x, t) =
Z
DP (↵, t)�(x�X(↵, t))|X
↵
|d↵, (2.4)
14

where the subscript ↵means derivative, and hence equation (2.1) is defined in a distributional
sense, that is, 8 2 C10 (R2, [0,1)),
Z 1
0
Z
D(
t
(X(↵, t), t) + v ·r (X(↵, t), t))P (↵, t)|X↵
|d↵dt = 0, (2.5)
with v = Xt
(↵, t) being the velocity at which the sheet evolves. Applying integration by
parts to (2.5), we arrive atZ 1
0
Z
D (X(↵, t), t) (P (↵, t)|X
↵
|)t
d↵dt = 0. (2.6)
Since (2.6) holds for any 2 C10 (R2, [0,1)), we must have
(P (↵, t)|X↵
|)t
= 0. (2.7)
A further simplification of (2.7) coupled with (2.2) gives us the generalized Birkho↵-Rott
equation
@P (↵, t)
@t+ P (↵, t)
X↵
· v↵
X↵
·X↵
= 0, (2.8)
@X(↵, t)
@t= v = K ⇤ P = r?N ⇤ P +rG ⇤ P. (2.9)
Notice that (2.7) is really conservation of mass (2.1) restricted on a curve, while it is a
generalization of Birkho↵-Rott equation in describing evolution of a sheet with a general
kernel K that is of mixed type, i.e., with both divergence free part r?N and gradient part
rG. The interactions between these two parts of K exhibit interesting nonlinear dynamics,
as we describe later in this chapter.
2.2 Numerical Method
We implement equations (2.8) and (2.9) using a fourth order Runge Kutta method in time
and centered di↵erence discretization in space. In addition, we apply an adaptive mesh
method using cubic interpolation for several of the more complicated examples in sections
2.2.3.1 where more resolution is required. We briefly present this algorithm below.
15

2.2.1 Algorithm
Throughout the section, we use N to denote the number of space discretization and M to
denote the total number of time steps. Since the spatial mesh is adaptive, N may vary from
step to step. Superscripts represent time steps, while subscripts are for spatial nodes. For
example, we use ↵n
i
to identify the value of Lagrangian parameter at the ith discretization
node, nth time step. We adopt the notations Xn, vn and Pn for vectors with entries
Xn
i
= X(↵i
, tn), vn
i
= v(↵i
, tn), and P n
i
= P (↵i
, tn),
respectively, and F1 and F2 be another two vectors with elements
F1,i(P,X,v) =@P n
j
@t= �P n
j
(Xj+1 �X
j�1) · (vj+1 � vj�1)
(Xj+1 �X
j�1) · (Xj+1 �Xj�1)
, (2.10)
F2,i(P,v) = vn
i
=X
j
K(Xn
i
�Xn
j
)P n
j
|�Xj
| =X
j
K(Xn
i
�Xn
j
)P n
j
|Xj+1 �X
j�1||↵
j+1 � ↵j�1| . (2.11)
respectively. Then the 4th order Runge Kutta algorithm is applied to (2.8) and (2.9):
1. ⇢n
1 = F2(Pn,Xn,Vn
1 ), Vn
1 = F1(Pn,Xn);
2. ⇢n
2 = F2(Pn +�t⇢n
1/2,Xn +�tVn
1/2,Vn
2 ), Vn
2 = F1(Pn +�t⇢n
1/2,Xn +�tVn
1/2);
3. ⇢n
3 = F2(Pn +�t⇢n
2/2,Xn +�tVn
2/2,Vn
3 ), Vn
3 = F1(Pn +�t⇢n
2/2,Xn +�tVn
2/2);
4. ⇢n
4 = F2(Pn +�t⇢n
3 ,Xn +�tVn
3 ,Vn
4 ), Vn
4 = F1(Pn +�t⇢n
3 ,Xn +�tVn
3 );
5. Pn+1 = Pn+�t(⇢n
1 +2⇢n
2 +2⇢n
3 +⇢n
4 )/6, Xn+1 = Xn+�t(Vn
1 +2Vn
2 +2Vn
3 +Vn
4 )/6.
After each Runge Kutta step, we update the tolerance in our adaptive mesh by first setting
✏ = min(total length of curve/N, ✏). We then consider the distance between consecutive
points |Xi+1 �X
i
|. If it is greater than ✏, we add one node ↵i+1/2 = (↵
i
+ ↵i+1)/2 between
them, with values of P (↵i+1/2) and X(↵
i+1/2) evaluated using cubic interpolation. We then
reorder the ↵i
’s to discard the half indices, so that i 2 N and ↵i
is monotone in i.
16

2.2.2 Convergence Study
To verify the convergence of our method, we use the periodic perturbation example in section
2.2.3.1 below. Since the exact solution to this example is unknown, we derive the order
of convergence by computing successive di↵erences between numerical solutions. We then
double the number of points (in time or in space respectively) and then apply equation (2.12)
to estimate the convergence rate.
For the convergence in time, let (X1,P1), (X2,P2), (X3,P3) and (X4,P4) be used to
denote the numerical solution for time discretization M = 10, 20, 40, 80 respectively, at
T = 0.1, with space discretization N = 100. Then the approximate convergence rate can be
calculated as follows
Conv. rate ⇡ log(||ei
||2/||ei+1||2)/ log 2, (2.12)
where ei
can be taken as vectors Xi
�Xi+1 or Pi
�Pi+1. Notice that subscripts i, i+1 refer
to consecutive refinements in either space or time.
For the convergence in space, we use the same notations with lower case letters (x1,p1),
(x2,p2), (x3,p3
) and (x4,p4) to denote the solution for space discretization N = 100, 200,
400, 800 respectively, at time T = 0.1, with M = 100. We use formula (2.12) to compute
the approximate convergence rate as before, except that ei
is taken to be vectors xi
�xi+1 or
pi
� pi+1
. We also compute the convergence in space with the e↵ect of cubic interpolation
by starting with the same parameter setting, and successively halving the adaptive tolerance
✏. We obtain solutions (z1,p1), (z2,p2
), (z3,p3) and (z4,p4
), and then use formula (2.12) to
compute the approximate convergence rate. From table (2.1), we can see that the convergence
is approximately 4th order in time, and 2nd order in space (as expected). We also see that
the convergence for cubic interpolation adaptive method is approximately 2nd order.
From the onset we designed a numerical scheme for this general curve evolution prob-
lem which is 4th order in time and 2nd order in space. For comparison to the simulation
of the classical vortex sheet problem many numerical schemes have been developed which
have varying convergence orders [CL, K, K2, L, P], including spectrally accurate convergent
17

Table 2.1: Convergence rate in time and space.
Convergence in time
M ||Xi
�Xi+1||2 conv. rate ||P
i
�Pi+1||2 conv. rate
10
20 6.1748e-07 7.7979e-06
40 4.6074e-08 3.7444 5.7844e-07 3.7528
80 3.1409e-09 3.8747 3.9661e-08 3.8664
Convergence in space
N ||xi
� xi+1||2 conv. rate ||p
i
� pi+1
||2 conv. rate
100
200 3.6915e-05 1.2083e-03
400 4.7733e-06 2.9511 2.7878e-04 2.1158
800 1.1654e-06 2.0342 6.9860e-05 1.9966
Convergence rate for cubic interpolation
✏ ||xi
� xi+1||2 conv. rate ||p
i
� pi+1
||2 conv. rate
0.06
0.03 4.7311e-06 2.7239e-04
0.015 1.1345e-06 2.0601 6.5691e-05 2.0519
0.0075 2.8138e-07 2.0115 1.6136e-05 2.0255
schemes [S, HLK].
2.2.3 Verification of Method
Here we test the new algorithm on well known examples. First, in section 2.2.3.1 we recom-
pute well studied solutions of vortex sheets in the literature using the new code and show
that the resulting solution are in excellent agreement to previously published results. Second,
in section 2.2.3.2 we compute concentric collapsing ring solutions in the purely aggregating
case and verify good agreement as compared to the known special solutions of the associated
18

ODE theory.
2.2.3.1 Case 1: Incompressible Vortex Sheet Examples
In this section we verify our model by implementing our method to simulate three vortex
sheet problems for the 2D Euler equations. This corresponds to setting N = 12⇡ log |r| and
G = 0 in equations (2.1) - (2.2). As mentioned previously, the motion of the vortex sheet is
governed by the Birkho↵-Rott equation (2.7) and it is well known that (2.7) is ill-posed due
to the Kelvin-Helmholtz instability, see [MB, SSBF]. Thus, in order to implement our model
to simulate equations (2.1) - (2.2) we must desingularize the kernel. Several approaches have
been developed to compute the evolution of vortex sheets [AG] which address the Kelvin-
Helmholtz instability. For our method we use Krasny’s [K] direct desingularization of the
kernel N ,
r?N�
=(X(�, t)�X(�0, t))?
|X(�, t)�X(�0, t)|2 + �2, (2.13)
where � is a regularization parameter, to compute the examples in this section.
Our first verification simulates the classical elliptically loaded wing example, [K2]. The
initial Lagrangian parameterization for the elliptically loaded wing is X(↵) = (x, y) = (2↵�1, 0), where ↵ 2 [0, 1]. The initial distribution of vorticity P is set by P = �d�/dx, where
� =p1� x2 is the circulation of the vortex sheet, as depicted in Figure 2.1.
−1 −0.5 0 0.5 10
0.5
1
1.5
2
−1 −0.5 0 0.5 1−10
−5
0
5
10(a) (b)
Figure 2.1: The initial condition for the elliptically loaded example ( dashed line) and the
simulated fuselage flap configuration example (solid line). Figure (a) is a plot of the initial
circulation against ↵, and Figure (b) is a plot of the initial density P against ↵.
19

Using our adaptive point method with error tolerance ✏ = 0.075, we initialize the sheet
using 401 points and at T = 4 the final number of points is 3171. The results are plotted in
Figure 2.2 and the observed roll-up is in excellent agreement with Figure 2 in [K2].
−1 −0.5 0 0.5 1
−0.5
0
0.5
t=0s
−0.5 0 0.5
−0.5
0
0.5t=1s
−1 −0.5 0 0.5 1−1
−0.5
0
t=2s
−1 −0.5 0 0.5 1
−1
−0.5
0
t=4s
Figure 2.2: The numerical solution at t = 0, 1, 2, 4 for the elliptically loaded wing example
using equations (2.8), (2.9) with (2.13). We take � = 0.05, �t=0.01, and we use adaptive
mesh refinement.
For our second example we apply our model to simulate the more complicated fuselage
flap configuration which was considered in [K2]. The initial conditions are chosen to simulate
20

−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−0.8−0.6−0.4−0.2
0
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−1.2−1
−0.8−0.6−0.4−0.2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−1.5
−1
−0.5
−2 −1 0 1 2−1.5
−1
−0.5
t=1s
t=2s
t=4s
t=3s
Figure 2.3: The numerical solution for the simulated fuselage flap configuration example
using equations (2.8) and (2.9). We take � = 0.1, �t=0.01, and we use adaptive mesh
refinement.
the vorticity generated from a fuselage flap and thus our initial P is chosen to be:
P (↵, 0) =
8>>>>>>>>>>>><
>>>>>>>>>>>>:
x/(1� x2), x 2 [�1,�0.7] [ [0.7, 1],
�3a3x2 � 2a2x� a1, x 2 [�0.7,�0.3],
�3b3x2 � 2b2x� b1, x 2 [�0.3, 0],
3b3x2 � 2b2x+ b1, x 2 [0,�0.3],
3a3x2 � 2a2x+ a1, x 2 [0.3, 0.7],
(2.14)
where (x(↵, 0), y(↵, 0)) = X(↵, 0) = (2↵� 1, 0) for ↵ 2 [0, 1], and ai
, bi
are chosen to ensure
21

continuity.
The initial distribution of both P and � are plotted in Figure 2.1. We once again initialize
our sheet using 401 points and at T = 4 the number of nodes is much higher (10151) due
to the increased stretching and roll-up as compared to the elliptically loaded wing example.
The results are plotted in Figure 2.3 and we once again get excellent agreement with Figure
19 in [K2].
−1 −0.5 0 0.5 1
−0.5
0
0.5
t=0s
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1t=1s
−1 0 1−1
−0.5
0
0.5
1
t=2s
−1 0 1−1
−0.5
0
0.5
1
t=3s
Figure 2.4: The numerical solution for the periodic perturbed ring example using equations
(2.8), (2.9), with (2.13). We take � = 0.05, �t = 0.01, and we use adaptive mesh refinement.
In our last example we simulate (2.8), (2.9) and (2.13), with periodic perturbations to
a uniformly distributed ring of vorticity with P (↵, 0) = 1 as our initial condition. This
example plays an important role in our later studies of both the superfluids and biological
examples found in the mixed kernels section (Section 2.3) so we first present simulations in the
purely incompressible case. We focus our attention on perturbations of radially symmetric
ring distributions in general because they seem to naturally arise as important solutions in
several di↵erent contexts, [KSUB, BCL]. The spatially periodic perturbation is chosen to be
cosine in the normal direction with 10 periods and the magnitude being 1% of the radius.
22

In this example we set the radius to 1 and thus our initial conditions are:
r(↵) = 1 + 0.01 cos(20⇡↵), P (↵, 0) = 1 (2.15)
X(↵, 0) = (x(↵, 0), y(↵, 0)) = (r(↵) cos(2⇡↵), r(↵) sin(2⇡↵)). (2.16)
We initialize with 400 points and at T = 4 the number of nodes has grown to 9670. Figure
2.4 demonstrates several stages of periodic roll-up of the ring of vorticity.
2.2.3.2 Case 2: Pure Aggregation
0 0.1 0.20
0.5
1a
radius
t0 0.1 0.20
0.5
1
t
radius
c
0 0.05 0.10
0.5
1
1.5
t
radius
e
0 0.1 0.20
0.5
1
t
radius
b
0 0.1 0.20
0.5
1d
t
radius
0 0.05 0.10
0.5
1
1.5
t
radius
f
Figure 2.5: The comparison of the numerical solution of the radius of rings. In the above 6
pictures, a, c and e are the plot of the radius using equations (2.18) and (2.19); b, d and f are
the plot of the radius computed using equations (2.8) and (2.9). a and b are the solutions for
the one ring case; c and d are the solutions for the two rings case; e and f are the solutions
for the three rings case.
We now turn our attention to a verification of our model when the flow is governed
by gradient dynamics, i.e., N = 0. For this example we focus on a model exhibiting only
23

aggregation, specifically taking the kernel K = rG where
G(r) = |r|. (2.17)
The active scalar equations with this kernel are well studied, [BL2, BCL, HB, HB2]. It was
shown in [BCL] that because the kernel (2.17) does not satisfy the Osgood condition, finite
time blow up of radially symmetric solutions occurs. In particular, we consider the family
of exact solutions of concentric delta rings studied in [BCL].
To begin, we consider concentric circles (about the origin), with radius r1, r2, . . . , rn,
and positive initial densities P1, P2,. . . , Pn
uniformly distributed over each circle. Because
kernel (2.17) is purely attractive and the density is all positive, the predicted behavior is
that the rings will contract to the origin under the flow of (2.1) - (2.2). In fact, it was shown
in [BCL] that the radius satisfies the following simple ODEs:
dri
dt= �
nX
j=0
2⇡rj
Pj
(ri
, rj
), (2.18)
where
(r, ⌧) =1
⇡
Z⇡
0
r � ⌧ cos ✓pr2 + ⌧ 2 � 2r⌧ cos ✓
d✓. (2.19)
Thus, to test our method in purely gradient dynamics, we separately simulate our model
(2.8) and (2.9) using the kernel (2.17), and then directly solve equations (2.18) - (2.19).
We plot the results in Figure 2.5. Figures 2.5a, 2.5c, and 2.5e are the plot of the radius
by directly solving (2.18) and (2.19); Figures 2.5b, 2.5d, and 2.5f are the plot of the radius
computed using equations (2.8) and (2.9). In each example, all rings have initial density
P (↵, 0) = 1. Table 2.2 shows the blow up times for each case and the agreement between
our method and the solutions to the ODEs is excellent.
24

Table 2.2: Ring collapsing time prediction
initial radius ring collapsing time.
One ring case Two rings case Three rings case
method ODE Ours ODE Ours ODE Ours
0.5 0.143 0.144 0.100 0.101
1 0.251 0.251 0.145 0.145 0.101 0.101
1.5 0.103 0.103
2.3 Kernels of Mixed Type
2.3.1 Example 1: Superfluids
We now turn our attention to examples where the kernels are of mixed type. In this section,
we consider a family of equations parameterized by ✓ that arises in the modeling of vortex
dynamics for superfluids described in [DP]. This family of equations takes the following
form:
@⇢
@t+r · (v⇢) = 0, (t,x) 2 (0,1)⇥ R2 (2.20)
v = Mr4�1⇢, ⇢|t=0 = ⇢0 (2.21)
where ⇢ is known as a vortex density function of the superfluid and M(✓) is a constant
orthogonal matrix of the form:
M(✓) =
0
@cos ✓ � sin ✓
sin ✓ cos ✓
1
A .
This model is derived from the hydrodynamic equations for Ginzburg-Landau vortices [W].
In [DP, MZ] the authors found that when cos ✓ = 0, smooth solutions to (2.20) and (2.21)
may blow up in finite time. In addition if ⇢0 changes sign, it was shown that concentration
phenomena exist in the approximate solutions sequence of (2.20) and (2.21) regardless of the
initial data’s degree of regularity. Thus it is interesting to study the vortex sheet problem
25

for (2.20) and (2.21) which is simply a generalization of the classic vortex sheet problem
studied in Section 2.2.3.1.
To match our notation, we may write (2.21) as (2.9) with
K(x) = rG(|x|)cos ✓2⇡
+r?G(|x|)sin ✓2⇡
, (2.22)
where G(r) = � ln r. We are specifically interested in using our model to better understand
the dynamics of vortex density sheets as we vary the parameter ✓. From our discussion
above it is clear that as ✓ increases from ✓ = �⇡/2 to ✓ = 0 the amount of contribution to
our kernel K from the gradient component (attraction) increases while simultaneously the
amount of incompressible component (rotation) decreases. What is surprising, though, is
that linearly increasing ✓ has several nonlinear e↵ects on the curve dynamics.
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Figure 2.6: Plot the evolution of the vortex density sheet at t = 1 for several values of ✓
with initial conditions (2.23). From outside to inside ✓ = �⇡/2, �5⇡/12, �⇡/3, �⇡/4,�⇡/6,�⇡/12, and 0. The asterisks represent the point that was initially positioned at (1, 0).
To begin, we use our model to solve for the curve solutions by simply replacing equation
(2.20) with (2.8). Since both rG and r?G are singular, we use Krasny’s desingularization
26

method G(r) =pr2 + ✏2 with ✏ = 0.1. We take perturbations of a ring of vorticity as our
first example with the following initial conditions:
X(↵, 0) = (x(↵, 0), y(↵, 0)) = (r(↵) cos(2⇡↵), r(↵) sin(2⇡↵)), P (↵, 0) = 1, (2.23)
where r(↵) = (1+0.01 cos(20⇡↵)). We solve equations (2.8) and (2.9) with initial conditions
(2.23) for ✓ = �⇡/2, �5⇡/12, �⇡/3, �⇡/4,�⇡/6, �⇡/12, and 0, plotting in Figure 2.6 the
position of the sheet at t = 1.
−18 −16 −14 −12 −10 −8 −6 −4 −2 0−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
parameter θ (times π/36)
rota
tion
an
gle
(t
ime
s π/2
)
Figure 2.7: Plot of the rotation angles at t = 1 with respect to parameter ✓. The solid curve
corresponds to the initial condition of a perturbed ring. The dashed curve corresponds to
an initial condition of an unperturbed ring.
If we record the angular coordinates of the asterisks in Figure 2.6 to the horizontal axis
we can use this to measure the amount of angular rotation of the ring. The innermost curve
corresponds to ✓ = 0, which is the pure gradient case for the kernel, and the curve clearly
exhibits no rotation. The outermost curve corresponds to ✓ = �⇡/2, which is the purely
incompressible case for the kernel; we measure the rotation angle to be approximately 0.187⇡.
One may expect that as we move from the outermost to the innermost curve (increasing ✓
by ⇡/12 between any of the two consecutive curves) we should observe a monotonic decrease
27

in rotation angle. Instead, Figure 2.6 shows that the amount of rotation actually increases
initially (and peaks near ✓ = �⇡/3), before eventually decreasing to zero.
We separately plot this rotation angle at t = 1 as a function of ✓ for both the perturbed
ring (2.23), and an unperturbed ring in Figure 2.7, seeing that in both cases a maximum
occurs on the interior of this range of ✓. The maximum angle for the perturbed case is
0.7123, attained at ✓ ⇡ �14/36⇡; while the maximum angle for the unperturbed case is
0.5835, attained at ✓ ⇡ �11/36⇡. In general, the value of ✓ for which the maximum angle
of rotation occurs is time-dependent but for t � 0 we observe that a maximum is always
found in the interior of (�⇡/2, 0). For t su�ciently small, the maximum angle occurs at
the parameter ✓ = �⇡/2, corresponding to a purely incompressible kernel. Hence, the
incompressible kernel dominates the initial rotation dynamics but for slightly longer times
the aggregation term plays an important role.
−1 0 1
−1
−0.5
0
0.5
1
(a). θ=−π/2
−1 −0.5 0 0.5 1
−0.5
0
0.5
(b). θ=−5π/12
−0.5 0 0.5
−0.5
0
0.5
(c). θ=−π/3
−0.05 0 0.05
−0.05
0
0.05
(d). θ=−π/4
Figure 2.8: The solution at time t=1.5 for four di↵erent values of ✓. The asterisk indicates
the position of the point initialized at (1, 0).
The second aspect of the curve dynamics we would like to study as we vary ✓ is the amount
28

of roll-up that occurs as a result of the perturbation to the ring. We are also interested in
the amplification in time of the perturbation as measured from the unperturbed ring as we
vary ✓. To study these aspects we selected ✓ = �⇡/2, �5⇡/12, �⇡/3 and �⇡/4, and plotted
the position of the curve at the later time t = 1.5 in Figure 2.8.
Noting the initial position (marked by an asterisk), it becomes clear that the solutions
with ✓ = �⇡/3 and �⇡/4 rotate more than ✓ = �⇡/2. In addition, we can see in Figure
2.8 that the amplitude of the perturbation also decreases as ✓ decreases from ✓ = �⇡/2 to
✓ = �⇡/4. The amount of roll-up appears to decrease, but unfortunately it is di�cult to
see in Figure 2.8 due to the smaller amplitude. To better investigate this phenomenon we
focus in Figure 2.9 on one of the roll-ups shown in Figure 2.8 (d). What we see in Figure
Figure 2.9: Subsequent enlargements of a particular roll-up in picture (d) from Figure 2.8
using 12530 grid points.
2.9 is that there are many roll-ups seen by zooming in on the wind up structure. We remark
as well that this roll-up structure is robust and does not change when we halve either the
error tolerance, or the time step. In order to calculate the wind up numbers precisely, we
calculate the tangential angle � at each point numerically using the following formula:
�i
= arctan
✓yi+1 � y
i�1
xi+1 � x
i�1
◆. (2.24)
29

Table 2.3: Table of wind up numbers
parameter ✓ �⇡/2 �5⇡/12 �⇡/3 �⇡/4wind up number 1.5 2.45 2.92 2.47
Based on this, we calculate the absolute value of the increase of � by
d�i
= |�i+1 � �
i
|. (2.25)
In one period, the roll-up rotates first counterclockwise and then clockwise an identical
amount. Thus, since the perturbation has ten periods, we define the wind up number asP
i
d�i
/20. As seen in Table 2.3, the amount of roll-up actually increases with ✓, eventually
peaking at around ✓ = �⇡/3 where there are approximately 2.92 rounds of roll-up. The
amount of roll-up then begins to decrease. At ✓ = �⇡/4, which represents an equal amount
of incompressible part and gradient part for the kernel, there are only 2.47 rounds of roll-up
in the picture.
Thus, we find that both the maximum amount of rotation of the vortex density ring and
the amount of roll-up are not monotone functions of ✓. For a fixed time t > 0 these maxima
occur when there is a fully-mixed kernel; i.e., a contribution from both the gradient part
and the incompressible part. The amplitude of the perturbation monotonically decreases as
✓ increases from ✓ = �⇡/2 to ✓ = 0. Ultimately, as ✓ increases and the gradient flow (the
attraction) becomes the dominant contributor to the velocity field, both the roll-up and the
rotation are damped out.
To explain this behavior physically and mathematically, we consider the linear stability
analysis associated with the Kelvin-Helmholtz instability for this more general problem of
a fully-mixed kernel. Specifically, we study the linear stability theory of perturbations of
a flat constant solution on a periodic domain. Recall that the linear stability analysis of
the classic vortex sheet problem [MB] demonstrates that the kth Fourier mode grows like
e|k|t/2 which implies that the linear evolution problem is linearly ill-posed. This ill-posedness
explains the rapid development of the complicated roll-up behavior seen in section 2.2.3.1,
30

classically known as the Kelvin-Helmholtz instability. Following the calculations in [MB] we
choose the flat vortex density solution to perform this calculation.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−0.1
0
0.1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−0.1
0
0.1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−0.1
0
0.1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−0.1
0
0.1
(d)
(b)
(c)
(a)
Figure 2.10: The solution to the periodic line problem at time t = 1, with initial condition
✏ sin(2⇡↵). (a). ✓ = �⇡/2, wind up number= 2.64; (b). ✓ = �5⇡/12, wind up number= 5.04;
(c). ✓ = �⇡/3, wind up number= 4.12; (d). ✓ = �⇡/4, wind up number= 1.60.
Our initial conditions for the flat density sheet problem can be expressed as z(↵, 0) =
↵ + ⌘(↵, 0) with ↵ 2 [�1,1], where ⌘ = ⌘2 + ⌘1i is a small perturbation to the position
of the sheet. By choosing ⇢|z↵
| = 1 over a fixed period, it is clear that ⌘ also represents a
perturbation of the density which takes the form ⇢ = 1� ⌘02 +O(⌘021 ) +O(⌘022 ). ⌘1 represents
a perturbation which is perpendicular to the flat sheet. ⌘2 is a parallel perturbation and is
the leading order contribution to the density perturbation. Figure 2.10 shows the evolution
of the curve at t = 1 for several di↵erent values of ✓ where ⌘1 is a small Fourier mode 1
perturbation and ⌘2 = 0.
We observe all the same phenomena that we saw in the ring perturbation calculation: As
31

✓ increases from �⇡/2 to �⇡/4, the number of roll-ups first increases and then decreases.
Second, the roll-ups become smaller and smaller in structure as the amplitude of the pertur-
bation (measured from the flat line) lowers as ✓ increases.
For our stability calculation we use the K(x, y) = �1K1(x, y) + �2K2(x, y), where �1 =
cos ✓ and �2 = � sin ✓. By equation (2.8) it is su�cient to understand the linearized evolution
equation for z(↵, t) which has the form
@z(↵, t)
@t=�2 � �1i
2⇡iPV
Zd↵0
z(↵, t)� z(↵0, t). (2.26)
By linearizing around our flat sheet z(↵, t) = ↵ + ⌘(↵, t), we get the following equation
@⌘
@t=�2 � �1i
2H⌘0 (2.27)
where H⌘0 is the Hilbert transform of ⌘0, where ⌘0 is the derivative of ⌘ with respect to the
parameterization and ⌘ is the complex conjugate of ⌘.
Letting ⌘(↵, t) = Ak
(t)ei2⇡k↵ +Bk
(t)e�i2⇡k↵, we get the following relations
A0k
= (�1 � �2i)⇡kBk
, B0k
= (�1 � �2i)⇡kAk
, (2.28)
which yield solutions of the form:
Ak
(t) = A+k
e⇡kt + A�k
e�⇡kt, Bk
(t) = B+k
e⇡kt +B�k
e�⇡kt. (2.29)
We now select an initial condition for our perturbation that contains both a spatial pertur-
bation to the curve (perpendicular to the flat sheet) and a density perturbation (parallel to
the flat sheet in the x direction). If we choose ⌘(↵, 0) = ✏1i sin 2⇡m1↵ + ✏2 sin 2⇡m2↵ then
for k 6= m1 or m2 we get Ak
(t) = Bk
(t) = 0. Otherwise,
A+m1
=✏14(1� �1 + �2i), A�
m1=✏14(1 + �1 � �2i), (2.30)
B+m1
=✏14(�1 + �1 � �2i), B�
m1=✏14(�1� �1 + �2i), (2.31)
A+m2
= � i✏24(1� �1 + �2i), A�
m2= � i✏2
4(1 + �1 � �2i), (2.32)
B+m2
= � i✏24(�1 + �1 � �2i), B�
m2= � i✏2
4(�1� �1 + �2i). (2.33)
32

The solution to the linearized problem is then: ⌘(↵, t) =
i[✏1(sin 2⇡m1↵ cosh(⇡m1t)� �1 sin 2⇡m1↵ sinh(⇡m1t)) + ✏2�2 sin 2⇡m2↵ sinh(⇡m2t)]
+✏2(sin 2⇡m2↵ cosh(⇡m2t)� �1 sin 2⇡m2↵ sinh(⇡m2t))� ✏1�2 sin 2⇡m1↵ sinh(⇡m1t).
(2.34)
From equation (2.34), we can now explain the e↵ect of including a gradient term on the
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
θ=−π/2θ=−5π/12θ=−π/3
Figure 2.11: The solution to the linearized problem at time t = 1.3 with initial condition
✏1 sin(2⇡↵). The solid curve is for ✓ = �⇡/2; the dashed curve is for ✓ = �5⇡/12; the
dotted-dashed curve is for ✓ = �⇡/3.
dynamics of the flat vortex density sheet and the Kelvin-Helmholtz instability. If we first
consider purely perpendicular perturbations to the vortex density sheet (corresponding to
✏2 = 0), our calculation above yields that the kth Fourier mode grows like e|k|t/2. This implies
that the linear evolution problem is still linearly ill-posed in the fully-mixed case. Hence,
just as in the classical Kelvin-Helmholtz instability, we expect a singularity in the curvature
of our solution in finite time. The linearization calculation provides the mechanism for the
dampened amplitude that we see in the nonlinear calculations in Figure 2.10.
When ✓ is a bit greater than �⇡/2, �1 is a small positive number. We can see from
equation (2.34) that this is the direct cause of the dampening out of the growth in the y
direction. This is observed in Figure 2.10 and is explicitly exhibited in the linearized solutions
plotted in Figure 2.11 for various ✓ values. We can now also argue why we observe more
33

0 0.5 10
1
2position, t=0
0 0.5 10.8
1
1.2density, t=0
0 0.5 10.95
1
1.05position, t=0.6
0 0.5 10
1
2density, t=0.6
0 0.5 10.95
1
1.05position, t=0.8
0 0.5 10
500
1000density, t=0.8
0 0.5 10.8
1
1.2position, t=1.1
0 0.5 10
5
10x 1010 density, t=1.1
Figure 2.12: Time evolution of both the curve and density with ⌘(↵, 0) = 0.01 sin(2⇡↵)
with ✓ = �5⇡/12. This pure density perturbation leads to both a curvature and density
singularity formation.
roll-up in fully-mixed kernels as opposed to just incompressible motion. At the point of a
roll-up, the dampened amplitude along with the added attractive behavior of the gradient
kernel forces the vorticity to remain closer together and aggregate at the roll-up point. Thus,
by having more “mass” in a closer proximity, the rotational rate of r�1 causes this aggregated
mass to rotate quicker than if no gradient dynamics were included.
We can also understand from equation (2.34) the linearized dynamics of a pure density
perturbation to the curve which corresponds to ✏1 = 0. The linearized solution also predicts
that the kth Fourier mode in the density grows like e|k|t/2, implying that the linear evolution
problem is also linearly ill-posed. Another e↵ect of including a gradient term is thus the
growth of singularities in the density in addition to the singularities in the curvature. In
general, an arbitrary small perturbation to the vortex density sheet will generate singularities
in both the curvature and the density; an example of this phenomenon is plotted in Figure
34
2.12. In this example, it appears that the curvature and density singularities occur at the
same spatial point. Whether curvature singularities and density singularities must occur at
the same place and time is unknown and is an interesting open question.
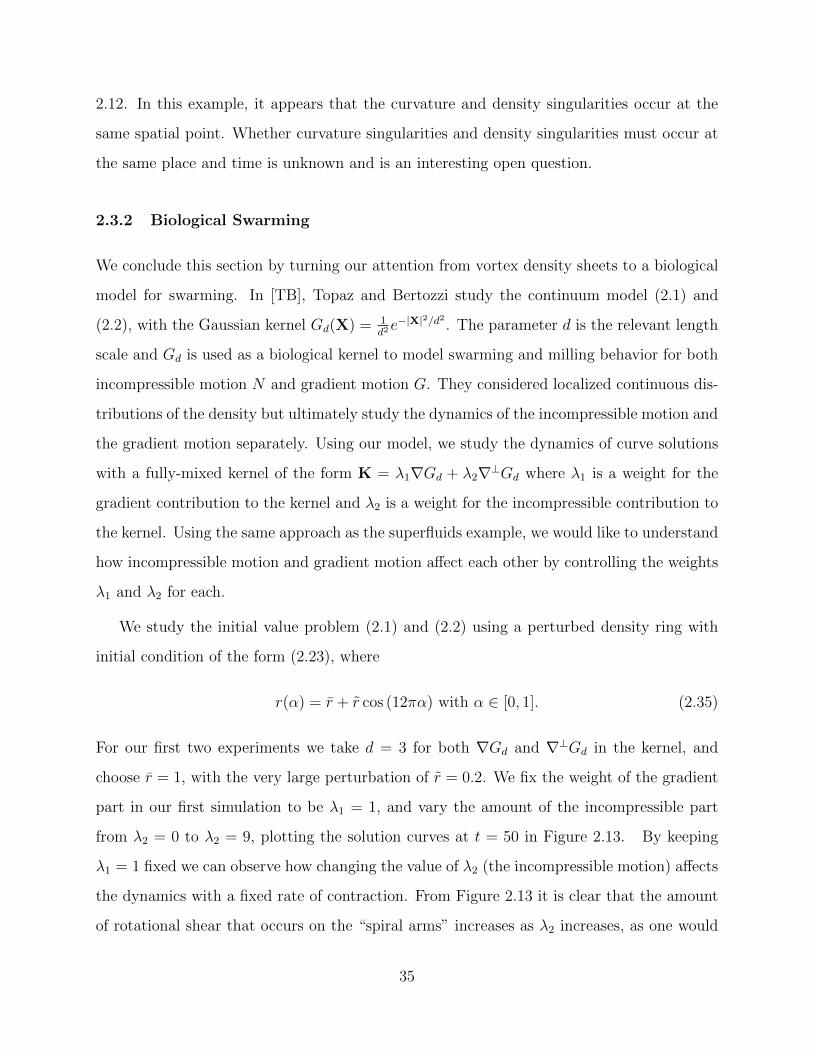
2.3.2 Biological Swarming
We conclude this section by turning our attention from vortex density sheets to a biological
model for swarming. In [TB], Topaz and Bertozzi study the continuum model (2.1) and
(2.2), with the Gaussian kernel Gd
(X) = 1d
2 e�|X|2/d2 . The parameter d is the relevant length
scale and Gd
is used as a biological kernel to model swarming and milling behavior for both
incompressible motion N and gradient motion G. They considered localized continuous dis-
tributions of the density but ultimately study the dynamics of the incompressible motion and
the gradient motion separately. Using our model, we study the dynamics of curve solutions
with a fully-mixed kernel of the form K = �1rGd
+ �2r?Gd
where �1 is a weight for the
gradient contribution to the kernel and �2 is a weight for the incompressible contribution to
the kernel. Using the same approach as the superfluids example, we would like to understand
how incompressible motion and gradient motion a↵ect each other by controlling the weights
�1 and �2 for each.
We study the initial value problem (2.1) and (2.2) using a perturbed density ring with
initial condition of the form (2.23), where
r(↵) = r + r cos (12⇡↵) with ↵ 2 [0, 1]. (2.35)
For our first two experiments we take d = 3 for both rGd
and r?Gd
in the kernel, and
choose r = 1, with the very large perturbation of r = 0.2. We fix the weight of the gradient
part in our first simulation to be �1 = 1, and vary the amount of the incompressible part
from �2 = 0 to �2 = 9, plotting the solution curves at t = 50 in Figure 2.13. By keeping
�1 = 1 fixed we can observe how changing the value of �2 (the incompressible motion) a↵ects
the dynamics with a fixed rate of contraction. From Figure 2.13 it is clear that the amount
of rotational shear that occurs on the “spiral arms” increases as �2 increases, as one would
35

−5 0 5x 10−5
−5
0
5x 10−5 λ2=0
−5 0 5x 10−5
−5
0
5x 10−5 λ2=0.1
−5 0 5x 10−5
−5
0
5x 10−5 λ2=0.5
−5 0 5x 10−5
−5
0
5x 10−5 λ2=1
−5 0 5x 10−5
−5
0
5x 10−5 λ2=5
−5 0 5x 10−5
−5
0
5x 10−5 λ2=9
Figure 2.13: The solution at time t=50 for �1 = 1 and varying values of �2.
expect. It is also easy to see that the rate of contraction (using the magnitude of the scale
of the curves 5 ⇥ 10�5) is identical regardless of how much incompressible part is added to
the kernel. This is also consistent with the superfluids example.
Next, we fix the incompressibility coe�cient �2 = 1 and vary the gradient coe�cient �1
to see how the increase of the gradient a↵ects the rotation and shear of the curve solutions.
Figure 2.14 gives the solutions for di↵erent �1’s at time t = 25. There are several important
features to observe in Figure 2.14. First, it is clear from the axis that as �1 increases the rate
of contraction increases as expected. Second, we note that the rotational shear of the arms
decreases and the amount of rotation of the shape increases as �1 increases. We calculate the
degree of rotation by measuring the angle from the asterisks to the point (1, 0); the values
are recorded in Table 2.4. One noticeable change in the angle occurs between �1 = 0.1 to
�1 = 0.5, where the angle of rotation changes from 1.23⇡ to 1.47⇡. Increasing values of �1
beyond �1 > 1 yields only small increases in the angle of rotation. Thus, even with a much
smoother Gaussian kernel the same theme from the the superfluids example persists: the
gradient contribution can have a strong e↵ect on the rotational dynamics but the reverse
36

−1 0 1−1
−0.5
0
0.5
1
λ1=0
−0.5 0 0.5
−0.5
0
0.5
λ1=0.1
−0.1 0 0.1−0.1
−0.05
0
0.05
0.1
λ1=0.5
−0.01 0 0.01
−5
0
5
x 10−3 λ1=1
−5 0 5x 10−5
−5
0
5x 10−5 λ1=2
−1 0 1x 10−11
−1
0
1
x 10−11 λ1=5
Figure 2.14: The solution at time t=25 for �2 = 1 and varying values of �1.
does not occur.
Table 2.4: Table of wind up numbers
Parameter �1 0 0.1 0.5 1 2 5
Rotation angle 1.0976 1.2276 1.4700 1.5358 1.5693 1.5894
Perhaps the most interesting behavior we observe in this example is that di↵erent spin
directions of the perturbation arms occur depending on the relationship between the size of
the ring r and the length scale of the kernel d. In our examples ⇢ > 0 the curve thus rotates
counterclockwise by the right hand rule. In Figure 2.15(a), which corresponds to d = 3 and
r = 1, the outer arms spin slower in the clockwise direction relative to the curve’s speed of
rotation, hence the arms appear to be “falling behind.” In contrast, Figure 2.15(b) uses the
parameters d = 1 and r = 1, producing a counterclockwise spin of the arms which is faster
than the curve’s speed of rotation. This forces the arms to “get ahead” of the curve. We
can suppose, then, that there must be a critical ratio �0 = d/r in the behavior of the spiral
arms as we increase the parameter d from 1 to 3 where the speeds match.
37
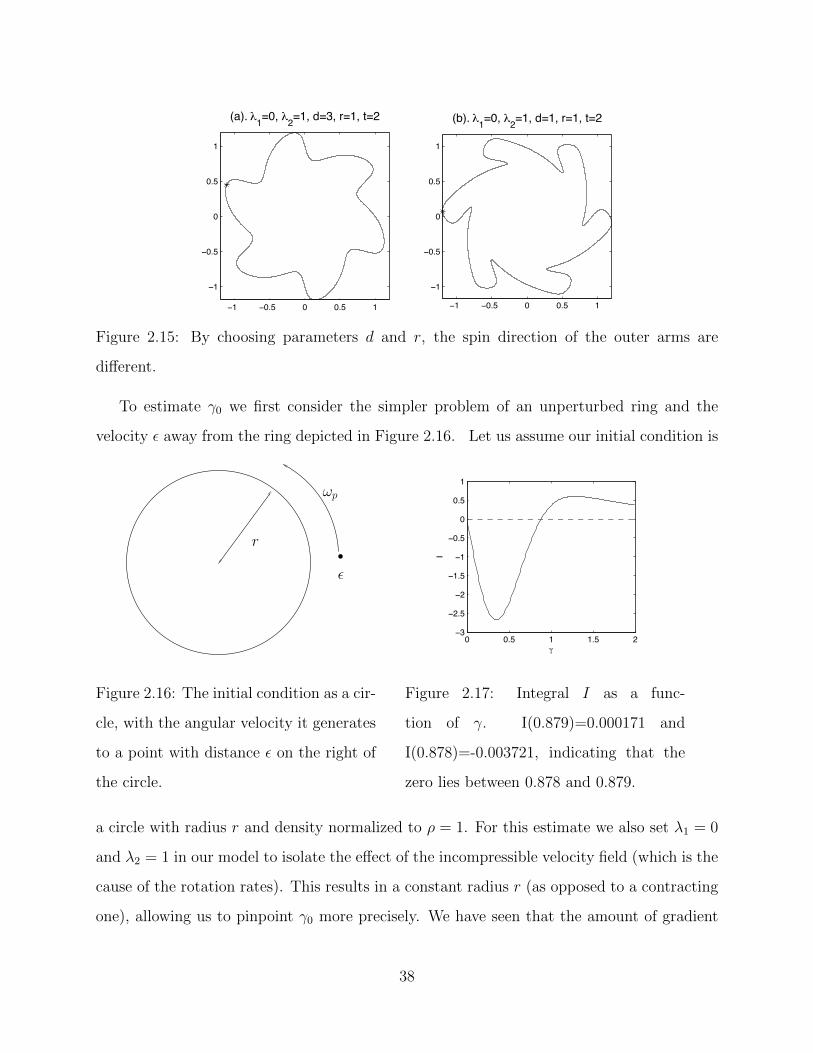
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
(a). λ1=0, λ2=1, d=3, r=1, t=2
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
(b). λ1=0, λ2=1, d=1, r=1, t=2
Figure 2.15: By choosing parameters d and r, the spin direction of the outer arms are
di↵erent.
To estimate �0 we first consider the simpler problem of an unperturbed ring and the
velocity ✏ away from the ring depicted in Figure 2.16. Let us assume our initial condition is
r
✏
!p
Figure 2.16: The initial condition as a cir-
cle, with the angular velocity it generates
to a point with distance ✏ on the right of
the circle.
0 0.5 1 1.5 2−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
γ
I
Figure 2.17: Integral I as a func-
tion of �. I(0.879)=0.000171 and
I(0.878)=-0.003721, indicating that the
zero lies between 0.878 and 0.879.
a circle with radius r and density normalized to ⇢ = 1. For this estimate we also set �1 = 0
and �2 = 1 in our model to isolate the e↵ect of the incompressible velocity field (which is the
cause of the rotation rates). This results in a constant radius r (as opposed to a contracting
one), allowing us to pinpoint �0 more precisely. We have seen that the amount of gradient
38

in the kernel has an e↵ect on the rotational shearing but we will observe below that the
predicted �0 seems to be independent of �2.
To find the value of �0 we need to compute the angular velocity !p
of a point p = (1+✏, 0)
just outside the ring, i.e., where ✏⌧ 1; see Figure 2.16. This point represents a small radial
perturbation of the circle. If this point is moving faster than on the ring then perturbations
of the ring will result in spiral arms that shear in the counterclockwise direction relative to
the ring, as in example 2.15(b). If the point is moving slower than on the ring the spiral
arms will fall behind the ring, as in example 2.15(a). To calculate the angular velocity !p
of
the point p which is a distance ✏ from the circle we compute the integral
!p
=1
r + ✏
Z 2⇡
0
@x
Gd
(r + ✏� r cos ✓,�r sin ✓)rd✓. (2.36)
We then di↵erentiate (2.36) with respect to ✏ and we get to leading order
d!p
d✏=
2
d5· I, where I =
Z 2⇡
0
[�r
d2(1� sin ✓)2 +
d
rsin ✓]e�2(1�sin ✓) r
2
d2 d✓. (2.37)
We see that the sign of d!d✏ depends solely on � = r/d. When I < 0, i.e., d!
d✏ < 0, the
points on the arm which are closer to the circle have a faster angular velocity. Then the
arms appear to wind up in the opposite direction of the spin. When I > 0, i.e., d!
d✏
> 0, the
points on the arm which are outside the circle have a faster angular velocity, which makes
the arms appear to wind up in the same direction as the spin. Thus, our critical value �0 is
precisely when I(�0) = 0, which is the critical ratio of radius to kernel length scale. Figure
2.17 is a numerical calculation of I as a function of �. From this we see that �0 ⇡ 0.88 for
our example.
The existence of a critical �0 provides the explanation of why we see qualitatively di↵erent
dynamics in the spiral arms between Figure 2.15(a) and 2.15(b). Since the ratio r/d is what
determines the shearing behavior in our simpler problem, we can measure the accuracy of
�0 = 0.88 once we include both a nonzero �1 and �2 in our fully nonlinear perturbation
problem. By including a positive value for �1 the curve solution will attract toward the
origin. Thus, if we start with a ring whose large perturbations initially start outside of
39
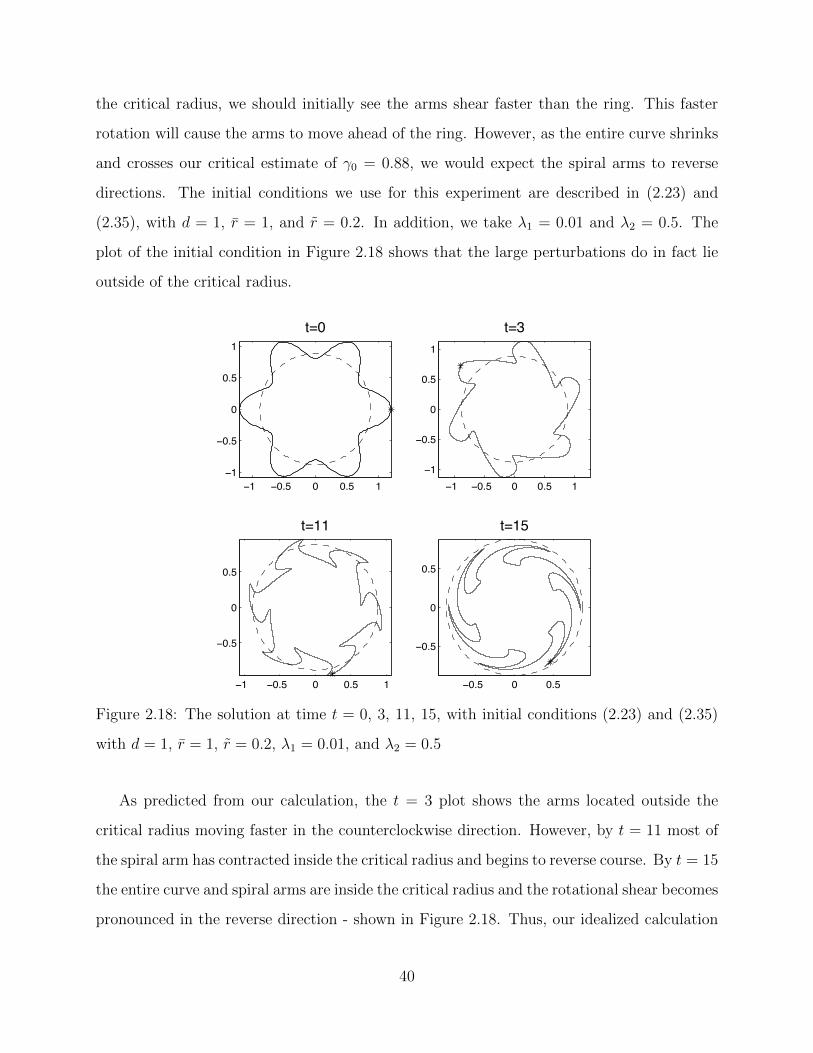
the critical radius, we should initially see the arms shear faster than the ring. This faster
rotation will cause the arms to move ahead of the ring. However, as the entire curve shrinks
and crosses our critical estimate of �0 = 0.88, we would expect the spiral arms to reverse
directions. The initial conditions we use for this experiment are described in (2.23) and
(2.35), with d = 1, r = 1, and r = 0.2. In addition, we take �1 = 0.01 and �2 = 0.5. The
plot of the initial condition in Figure 2.18 shows that the large perturbations do in fact lie
outside of the critical radius.
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1t=0
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
t=3
−1 −0.5 0 0.5 1
−0.5
0
0.5
t=11
−0.5 0 0.5
−0.5
0
0.5
t=15
Figure 2.18: The solution at time t = 0, 3, 11, 15, with initial conditions (2.23) and (2.35)
with d = 1, r = 1, r = 0.2, �1 = 0.01, and �2 = 0.5
As predicted from our calculation, the t = 3 plot shows the arms located outside the
critical radius moving faster in the counterclockwise direction. However, by t = 11 most of
the spiral arm has contracted inside the critical radius and begins to reverse course. By t = 15
the entire curve and spiral arms are inside the critical radius and the rotational shear becomes
pronounced in the reverse direction - shown in Figure 2.18. Thus, our idealized calculation
40

for the critical radius based on the assumption of an unperturbed ring approximates the
reversal quite well, though it appears that the reversing of the spiral arm direction in the
t = 11 picture of Figure 2.18 does occur just outside of the ring.
41

CHAPTER 3
Stability of Ring Patterns in R2
3.1 Discrete and Continuum Models
In a general space dimension Rd, the N particle interaction system
dxj
dt=
1
N
X
k 6=j
f(|xj
� xk
|)(xj
� xk
), (3.1)
where rf(r) = �P 0(r) for some pairwise interaction potential P , is a gradient flow of the
energy
E(x1,x2, . . . ,xN
) =X
i,j 6=i
P (|xi
� xj
|). (3.2)
In a continuum limit as N ! 1, (3.1) takes the form of the aggregation equation
⇢t
(x, t) +r · (⇢(x, t)v(x, t)) = 0, with x 2 Rd,
v(x, t) =
Zf(x� y)(x� y)⇢(y, t)dy, (3.3)
which is also known as the active scalar equation. Here, ⇢ describes the density of particles
and v is the velocity field. By then considering a weak formulation of (3.3) where the
density aggregates on a co-dimension one shell one can derive, see [SUB, KSUB, VUKB] the
evolution equation for the material point of the shell, X(⇠), to be
Xt
= v =
Z
D
f(|X(⇠)�X(⇠0)|)(X(⇠)�X(⇠0))⇢0(⇠0)dS⇠0 , (3.4)
where parameterize the curve with Lagrangian parameter ⇠ 2 D ⇢ Rd�1.
42

In this chapter, we focus on the case d = 2, and consider the particle interaction system
in the complex domain C instead of R2. Then we rewrite (3.1) as
dxj
dt=
1
N
X
k 6=j
f(|xj
� xk
|)(xj
� xk
) (3.5)
for the discrete model. For the continuum model, we are particularly interested in the curved
solutions, hence we assume a Lagrangian representation x(✓, t) 2 C with ✓ 2 [0, 2⇡]. With
the assumption of uniform initial density on the curve, we substitute (3.4) by
@x
@t(✓, t) =
1
2⇡
Z 2⇡
0
f(|x(✓, t)� x(✓0, t)|)(x(✓, t)� x(✓0, t))d✓0. (3.6)
3.2 Linear Stability of the Ring Solution in R2
The analysis can be carried out with both discrete model (3.5) and continuum model (3.6).
3.2.1 with Discrete Model
We begin by considering the ring steady state for the equations (3.5) consisting of N particles
equally spaced particles located on a ring of radius R,
xj
= R exp (2⇡ij/N) , j = 1 . . . N.
The equilibrium value for R then satisfies the radius condition
0 =N�1X
j=1
f(2R sin(⇡j/N))(1� ei2⇡j/N). (3.7)
Now we add a small perturbation hj
⌧ 1 to each xj
xj
= R exp (2⇡ij/N) (1 + hj
) (3.8)
We compute
xj
� xk
= R exp (2⇡ik/N)�1� ei� + h
j
� ei�hk
�where � =
2⇡(k � j)
N.
|xk
� xj
| ⇠ 2R
����sin�
2
����+R
4��sin �
2
��⇥(1� ei�)
�hk
+ hj
�+ (1� e�i�)
�hk
+ hj
�⇤.
43

Substituting (3.8) into (3.5) leads to the following linearized system,
dhj
dt=X
k
f 0✓2R
����sin�
2
����
◆R
4��sin �
2
�� [(1� ei�)�hk
+ hj
�
+ (1� e�i�)�hk
+ hj
�]�1� ei�
�
+X
k
f
✓2R
����sin�
2
����
◆ �hj
� ei�hk
�, where � =
2⇡(k � j)
N.
Next we use the identities
(1� ei�)2 = �4 sin2
✓�
2
◆ei�; (1� ei�)(1� e�i�) = 4 sin2
✓�
2
◆
to obtain
dhj
dt=X
k,k 6=j
G1(�/2)�hj
� ei�hk
�+G2(�/2)
�hk
� ei�hj
�,
where � =2⇡(k � j)
N
(3.9)
with
G1(�) =1
NRf 0 (2R |sin�|) |sin�|+ 1
Nf (2R |sin�|) ;
G2(�) =1
NRf 0 (2R |sin�|) |sin�| .
(3.10)
Use an anztaz
hj
= ⇠+(t)eim✓ + ⇠�(t)e
�im✓, ✓ = 2⇡j/N, m 2 N. (3.11)
Then
hk
= ⇠+eim✓eim� + ⇠�e
�im✓e�im�, (3.12)
and substituting (3.11), (3.12) into (3.9) and collecting like terms in eim�, e�im� leads to a
system
⇠0+ = ⇠+X
k,k 6=j
G1(�/2)�1� ei(m+1)�
�+ ⇠�
X
k,k 6=j
G2(�/2)�eim� � ei�
�(3.13)
⇠0� = ⇠�X
k,k 6=j
G1(�/2)�1� ei(�m+1)�
�+ ⇠+
X
k,k 6=j
G2(�/2)�e�im� � ei�
�(3.14)
It is easy to check that the sums in (3.13, 3.14) are all real so that the system becomes
⇠0+ = ⇠+I1(m) + ⇠�I2(m), ⇠0� = ⇠�I1(�m) + ⇠+I2(�m)
44

where
I1(m) =X
k,k 6=j
G1(�/2)�1� ei(m+1)�
�= 4
N/2X
k=1
G1(⇡k
N) sin2
✓(m+ 1) ⇡k
N
◆, (3.15)
I2(m) =X
k,k 6=j
G2(�/2)�eim� � ei�
�
= 4N/2X
k=1
G2(⇡k
N)
sin2
✓⇡k
N
◆� sin2
✓m⇡k
N
◆�. (3.16)
We thus obtain0
@ ⇠0+
⇠0
1
A = M ·0
@ ⇠+
⇠
1
A =
0
@ I1(m) I2(m)
I2(m) I1(�m)
1
A ·0
@ ⇠+
⇠
1
A (3.17)
Substituting ⇠± = b± exp (�t) we find that � is the eigenvalue of the matrix M.
3.2.2 with Continuum Model
The linear stability analysis for the ring solutions to the continuum model (3.6) is similar to
that of the discrete case. We start with the radius conditionZ ⇡
2
0
f(2R sin ✓) sin2 ✓d✓ = 0, (3.18)
which is a limit of (3.7) when N ! 1. Based on this, we assume the curved solution x(✓, t)
has a small deviation h(✓, t) ⌧ 1 from the ring steady state
x(✓, 0) = R exp (i✓)(1 + h(✓, 0)) (3.19)
In the rest of this chapter, for simplicity, we use the abbreviations x and x0 for x(✓, t) and
x(✓0, t), and h and h0 for h(✓, t) and h(✓0, t). We then have
x� x0 = R exp (i✓)�1� ei� + h� ei�h0� where � = ✓0 � ✓. (3.20)
|x� x0| ⇠ 2R
����sin�
2
����+R
4��sin �
2
��⇥(1� e�i�)
�h+ h0
�+ (1� ei�)
�h+ h0�⇤ . (3.21)
Substituting (3.20) and (3.21) into (3.6), with the same ansatz
h(✓, t) = ⇠+(t)eim✓ + ⇠�(t)e
�im✓, (3.22)
45

after similar analysis as in the discrete case, we arrive at the same linearization problem:
0
@ ⇠0+
⇠0
1
A = M ·0
@ ⇠+
⇠
1
A =
0
@ I1(m) I2(m)
I2(m) I1(�m)
1
A ·0
@ ⇠+
⇠
1
A , (3.23)
with I1(m), I2(m) defined as the limit of (3.15) and (3.16) when N ! 1. The above
discussion can be summarized into the following theorem.
Theorem 3.2.1. In the continuum model, consider the ring equilibrium of radius R given
by (3.18) for the flow (3.4). Define
I1(m) :=4
⇡
Z⇡/2
0
(Rf 0 (2R sin ✓) sin ✓ + f (2R sin ✓)) sin2((m+ 1)✓)d✓; (3.24)
I2(m) :=4
⇡
Z⇡/2
0
(Rf 0 (2R sin ✓) sin ✓)⇥sin2(✓)� sin2(m✓)
⇤d✓; (3.25)
M(m) :=
0
@ I1(m) I2(m)
I2(m) I1(�m)
1
A . (3.26)
Suppose that � 0 for all eigenvalues � of M(m) for all m 2 N. Then the ring equilibrium
is locally stable. It is unstable otherwise.
For finite N , the ring is stable if � 0 for all eigenvalues � of M(m) for all m =
1, 2, . . . N, but with I1, I2 as given by (3.15), (3.16).
3.2.3 Numerical Examples
In this section, we consider 2D particle interactions with specified interaction laws. In
particular, we consider a tanh kernel
f(r) =tanh((1� r)a) + b
r, (3.27)
and a power law kernel
f(r) = ra�1 � rb�1. (3.28)
A zoo of patterns arise if we plot the final steady states of the particle system (3.1) under
46

Figure 3.1: Simulation of (3.1) under interaction law (3.27) or (3.28) with certain parameter
choices on a and b.
interaction (3.27) with various parameter choices on a and b. In Figure 3.1, we observe pat-
terns such as rings, triangular curves, target, annulus, concentric rings, soccer ball pattern,
etc.
The evolution of the particle system (3.1) under interaction (3.27) or (3.28) with some
parameter choices are plotted in Figure 3.2. For the case where we simulate (3.1) and
(3.27), with a = 10, b = 0.1, as shown in the first row of Figure 3.2, we realize that there is a
mode two instability that distort the ring steady state into a more elliptical looking shape.
In addition, there seems to be another mode four instability that pushes the individuals
towards four high density groups. Indeed, one can apply Theorem 3.2.1 to mode m = 2, 4
and calculate the most positive eigenvalue of matrix M as defined in (3.26). As shown in the
left picture of Figure 3.3, both mode 2 and mode 4 leads to at least one positive eigenvalue
47

−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
−1 0 1−1
0
1
Figure 3.2: Simulation of (3.1) under interaction law (3.27) or (3.28) with certain parameter
choices. Simulation size: N = 400 individuals. First column, t = 0; Second column, t = 2;
Third column, t = 50; Forth column, t = 1000. First row, tanh kernel (3.27), with a = 10,
b = 0.1; Second row, power law kernel (3.28), with a = 0.5, b = 6; Third row, power law
kernel (3.28), with a = 0.5, b = 4.
for M , and hence are unstable. Interestingly, we also observe instability for many other
modes.
For the cases where we simulate (3.1) and (3.28), we have two examples plotted in Figure
3.2, one with a = 0.5, b = 6, with ring solution bifurcates into a three mode instability,
another with a = 0.5, b = 4, with ring solution a stable steady state. The corresponding
calculations of the most positive eigenvalues of M as plotted in Figure 3.3 suggest that mode
3 is unstable when a = 0.5, b = 6, and stable when a = 0.5, b = 4. These results coincide
with the numerical simulations.
48

0 5 10 15 20−0.5
0
0.5
1
0 5 10 15 20−0.6
−0.4
−0.2
0
0.2
0 5 10 15 20−0.4
−0.3
−0.2
−0.1
0
Figure 3.3: The most positive eigenvalue of M(m) as defined in (3.26), for modes m ranging
from 1 to 20. Left: tanh kernel (3.27), with a = 10, b = 0.1; Middle: power law kernel (3.28),
with a = 0.5, b = 6; Right: power law kernel (3.28), with a = 0.5, b = 4.
3.3 Linear Stability of the Shell Solution in Rd
A generalization of the linear stability theory of the shell solution in Rd with d � 3 is derived
by Brecht et. al.[VUKB]. The analysis utilizes spherical harmonics and hypergeometric
functions. In this section, we present their results without proving it. Hereby we denote a
unit spherical shell as Sd�1. Recall that in Rd, the distance between two vectors on a sphere
|X�X0| can be related to their inner product through the following formula:
|Y �Y0|2/2 = R2 �Y ·Y0, given |Y| = |Y0| = R. (3.29)
For convenience, we rewrite (3.4) as
Yt
= v =
Z
D
g
✓ |Y �Y0|22
◆(Y �Y0)dS⇠0 , (3.30)
where g
✓ |Y �Y0|22
◆= f(|Y �Y0|). (3.31)
We then denote the unit sphere as: B(⇠)e1, where B serves as a rotation matrix, e1 is a unit
vector (1, 0, · · · , 0) in Rd, and ⇠ is a parameterization of the unit sphere. The columns of the
matrix B = [b1, b2, · · · , bd] can be defined as the following: b1 is the position on the sphere,
bj
= b1⇠j�1
, the derivative of b1 with respect to ⇠j�1, and b
j
= bj
/|bj
| for 2 j d. The
49

perturbed solution can be written as:
Y(⇠) = B(⇠) · (Re1 + �(⇠)e�t), (3.32)
�(⇠) = ✏[c1Sm(⇠), c2
Sm
⇠1(⇠)
|b1|, · · · , c2
Sm
⇠d�1(⇠)
|bd�1|
], (3.33)
where R satisfies the radius condition:
Z 1
�1
g(R2(1� s))(1� s)(1� s2)d�32 ds = 0, (3.34)
and Sm is a spherical harmonic of mode m. Through the definition of B, we notice that c1
corresponds to the perturbation in the normal direction and c2 corresponds to the perturba-
tion in the tangential direction of the shell. Because of the spherical symmetry of the shell,
all tangential directions are equivalent.
The linearization of the shell solution to system (3.30) can be formulated as a scalar
eigenvalue problem[VUKB]:
�
2
4c1
c2
3
5 = Md
(m)
2
4c1
c2
3
5 =
2
4↵ + �d,m
(g1) m(d+m� 2)�d,m
(g2)
�d,m
(g2) m(d+m� 2)�d,m
(g3)/R2
3
5
2
4c1
c2
3
5 , (3.35)
with ↵ = vol(Sd�2)
Z 1
�1
(1� s2)d�32 · �g(R2(1� s)) +R2g0(R2(1� s))(1� s)2
�ds,
g1(s) = R2g0(R2(1� s))(1� s)2 � g(R2(1� s))s,
g2(s) = g(R2(1� s))(1� s), and g03(s) = �R2g(R2(1� s)). (3.36)
Here, m denotes the mode of the spherical harmonic and, for any function h smooth enough,
�d,m
(h) = vol(Sd�2)
Z 1
�1
h(s)P(d/2�1)
m
(s)(1� s2)d�32 ds, (3.37)
where P(d/2�1)
m
are Gegenbauer polynomials[S2], normalized so that Pm
(1) = 1.
The shell solution with radius R defined by (3.34) is linearly stable if � < 0 for all the
eigenvalues of Md
(m); it is unstable with mode m perturbation if � > 0 for one of the two
eigenvalues of Md
(m).
50

3.4 Weakly Nonlinear Analysis: Low Mode Bifurcations
Theorem 3.2.1 characterizes the conditions for a ring solution to be stable for the continuum
model. That is, the eigenvalues of the matrix M(m) defined in (3.26) should be both
nonpositive. For a given mode m, when one of the eigenvalues becomes zero, the stability
changes. In this section, we study the bifurcation dynamics in general using weakly nonlinear
analysis. As such, we rewrite the continuum model (3.6):
@x
@t(✓, t) =
1
2⇡
Z 2⇡
0
f(⌫, |x(✓, t)� x(✓0, t)|)(x(✓, t)� x(✓0, t))d✓0, (3.38)
where ⌫ is considered to be the bifurcation parameter. We are particularly interested in the
critical value of ⌫, i.e. ⌫ = ⌫0, which gives zero determinant ofM(m), with the corresponding
ring steady state solution
x(✓, t) = u0(✓, t) = Rei✓. (3.39)
For simplicity, in the rest of this section, we use the notation x for x(✓, t), x0 for x(✓0, t), f
for f(⌫0, |x(✓, t) � x(✓0, t)|), @⌫
f for @f/@⌫ evaluated at (⌫0, |x(✓, t) � x(✓0, t)|), and f 0, f 00,
etc. for the corresponding derivatives of f with respect to the second argument evaluated at
(⌫0, |x(✓, t) � x(✓0, t)|). Let 0 ✏ ⌧ 1 be an expansion parameter near a bifurcation point
u0,
x(✓, t) = u0(✓, t) + ✏u1(✓, t) + ✏2u2(✓, t) + ✏3u3(✓, t) + · · · , (3.40)
⌫ = ⌫0 + ✏⌫1 + ✏2⌫2 + · · · . (3.41)
At order O(✏), we obtain the linear equation
L(u1, u1) =1
⇡
Z⇡
0
(f 0R sin�+ f)(u1 � u01)d�
� e2i✓
⇡
Z⇡
0
f 0R sin�e2i�(u1 � u01)d�
=� ⌫1I0ei✓, with I0 =
4
⇡
Z⇡/2
0
R@⌫
f sin2 �d�
(3.42)
and � = (✓0 � ✓)/2. The solution to (3.42) is u1 = b1ei(m+1)✓ + b2e
�i(m�1)✓ + b0ei✓, where
[b1, b2]t 2 N (M(m)) and b0 = ⌫1c1, with c1 = �I0/(I1(0) + I2(0)). This is the eigenvalue
51

problem for the linear stability of the ring solution. Typically one measures the amplitude
that the solution deviates either radially as |b2 + b1| or tangentially as |b2 � b1|.At order O(✏2), we obtain
L(u2, u2) =
� ⌫1 (b1, b2) ·0
@ 2c1I3(m) + @⌫
I1(m) �2c1I4(m) + @⌫
I2(m)
�2c1I4(m) + @⌫
I2(m) 2c1I3(�m) + @⌫
I1(�m)
1
A ·0
@ ei(m+1)✓
e�i(m�1)✓
1
A
�0
@ b21I5(m) + b22I6(m)� b1b2I7(m)
b21I5(�m) + b22I6(�m)� b1b2I7(�m)
1
At
·0
@ ei(2m+1)✓
e�i(2m�1)✓
1
A
�✓⌫2I0 +
⌫212@⌫
I0 +�b1b2I4(m) + b21I3(m) + b22I3(�m)
�◆ei✓,
(3.43)
where
I3(m) =4
⇡
Z⇡/2
0
(2Rf 00 sin�+ 3f 02(m+ 1)� sin�d�,
I4(m) =4
⇡
Z⇡/2
0
(2Rf 00 sin�+ f 0) sin (m� 1)� sin (m+ 1)� sin�d�,
I5(m) =2
⇡
Z⇡/2
0
(3
2f 0 +Rf 00 sin�) sin2 (m+ 1)� sin (2m+ 1)�d�,
I6(m) =2
⇡
Z⇡/2
0
(�1
2f 0 +Rf 00 sin�) sin2 (m� 1)� sin (2m+ 1)�d�,
I7(m) =2
⇡
Z⇡/2
0
(3f 0 + 2Rf 00 sin�) sin (m� 1)� sin (m+ 1)� sin (2m+ 1)�d�.
Applying the Fredholm alternative to ensure that the right hand side of (3.43) is in the
range space of the linear operator L determines a unique solution u2 = b21c3ei(2m+1)✓ +
b21c4e�i(2m�1)✓ + (⌫2c1 + b21c2)e
i✓, subject to the condition that ⌫1 = 0, where
c2 = ��I1(m)I4(m)/I2(m) + I3(m) + I1(m)2I3(�m)/I2(m)2
I1(0) + I2(0),
2
4 c3
c4
3
5 = �M(2m)�1 ·2
4 I5(m) + I1(m)2I6(m)/I2(m)2 + I1(m)I7(m)/I2(m)
I5(�m) + I1(m)2I6(�m)/I2(m)2 + I1(m)I7(�m)/I2(m)
3
5
(3.44)
52

Finally, at O(✏3), we use the equation L(u3, u3) = R3(u0, u1, u2, ⌫2), to determine the rela-
tion between ⌫2 and b1, b2. Applying the Fredholm alternative to this equation,
Im�R3(u0, u1, u2, ⌫2)(I1(m)e�i(m+1)✓ + I2(m)ei(m�1)✓)
�= 0, (3.45)
which yields
⌫2 = b21
=⌧4I1(m)I2(m)� ⌧3I2(m)2
⌧1I2(m)� ⌧2I1(m) + I2(m)2@⌫
I1(m)� 2I1(m)I2(m)@⌫
+ I1(m)2@⌫
I1(�m), (3.46)
where
⌧1 = 2c1I2(m)I8(m) + 2c1I1(m)I9(m)
⌧2 = �2c1I1(m)I8(�m)� 2c1I2(m)I9(m)
⌧3 = 2c2I8(m) + 2c2I1(m)I9(m)/I2(m)
+ c3I1(m)I11(m)/I2(m) + c3I10(m) + c4I1(m)I11(�m)/I2(m) + c4I12(�m)
+ I14(m) + I1(m)I15(m)/I2(m) + I1(m)2I16(m)/I2(m)2 + I1(m)3I13(�m)/I2(m)3
⌧4 = �2c2I1(m)I8(�m)/I2(m)� 2c2I9(m)
� c4I11(�m)� c4I1(m)I10(�m)/I2(m) + c3I1(m)I11(m)/I2(m) + c3I12(m)
� I1(m)3I14(�m)/I2(m)3 � I1(m)2I15(�m)/I2(m)2 � I1(m)I16(�m)/I2(m)� I13(m)
(3.47)
53

and
I8(m) =2
⇡
Z⇡/2
0
(2Rf 00 sin�+ 3f 0) sin2 (m+ 1)� sin�d�,
I9(m) =2
⇡
Z⇡/2
0
(2Rf 00 sin�+ f 0) sin (m� 1)� sin (m+ 1)� sin�d�,
I10(m) =2
⇡
Z⇡/2
0
(2Rf 00 sin�+ 3f 0) sin2 (m+ 1)� sin (2m+ 1)�d�,
I11(m) =2
⇡
Z⇡/2
0
(2Rf 00 sin�+ 3f 0) sin (m� 1)� sin (m+ 1)� sin (2m+ 1)�d�,
I12(m) =2
⇡
Z⇡/2
0
(2Rf 00 sin�+ f 0) sin2 (m� 1)� sin (2m+ 1)�d�,
I13(m) =2
⇡
Z⇡/2
0
(2Rf 000 sin�+ 3f 00 � 3f 0
2R sin�) sin (m� 1)� sin3 (m+ 1)�d�✓,
I14(m) =2
⇡
Z⇡/2
0
(2Rf 000 sin�+ 5f 00 +3f 0
2R sin�) sin4 (m+ 1)�d�,
I15(m) =2
⇡
Z⇡/2
0
(5
3Rf 000 sin�+ 2f 00 � f 0
R sin�) sin3 (m+ 1)� sin (m� 1)�d�,
I16(m) =2
⇡
Z⇡/2
0
(5
3Rf 000 sin�+ 2f 00 +
f 0
R sin�) sin2 (m� 1)� sin2 (m+ 1)�d�.
(3.48)
We conclude this section with the following theorem:
Theorem 3.4.1. Let f(⌫, r) be an attractive-repulsive kernel, with a parameter ⌫, where
mode m perturbation is stable for ⌫ < ⌫0, unstable for ⌫ > ⌫0 and f(⌫0, r) gives the instability
threshold det(M(m)) = 0. Given the following conditions:
1. I0 6= 0
2. I1(0) + I2(0) 6= 0
3. The matrix N(m) =
0
@ 2c1I3(m) + @⌫
I1(m) �2c1I4(m) + @⌫
I2(m)
�2c1I4(m) + @⌫
I2(m) 2c1I3(�m) + @⌫
I1(�m)
1
A has nonzero
determinant.
4. The matrix M(2m) has nonzero determinant.
54

5. The denominator of in (3.46) is nonzero.
Then we have a pitchfork bifurcation for solutions of (3.38) at ⌫ = ⌫0, with bifurcation
coe�cient defined either
⌫2/|b1 + b2|2 = I2(m)2/(I1(m)� I2(m))2 (radially),
or ⌫2/|b1 � b2|2 = I2(m)2/(I1(m) + I2(m))2 (tangentially),
where ⌫2 and are defined in (3.46).
3.4.1 Numerical Example
Figure 3.4: Bifurcation diagram for interaction force (3.28), with p = 0.5. The solid curve is
calculated from Theorem 3.4.1.
We now use weakly nonlinear theory to analyze how the transition of stability occurs.
Figure 3.4 is a bifurcation diagram for interaction force (3.28), taking p = 0.5, where we
record the change of the quantity
�r = rmax
� rmin
according to the bifurcation parameter q, with rmax
and rmin
being the maximum and min-
imum of the displacement from the origin. Numerical simulation for the whole system (3.1)
are done with 100 particles with random initial condition, plotted as black dots. At q = 4.95
the steady state solution remains a stable ring; while at q = 4.98 the mode 3 becomes slightly
55

unstable and the points tend to move tangentially to break the ring into a triangular shape.
By further increasing q, the points on the curve continue to move toward a more triangular
shape. The weakly nonlinear analysis confirms that this process is in fact a supercritical
pitchfork bifurcation. We apply Theorem 3.4.1 to obtain the analytical form of the pitchfork
�r =pmax{0, ⌧ · (q � q
c
)} with qc
⇡ 4.9696 and ⌧ ⇡ 0.01188, (3.49)
which is plotted as a solid line in 3.4.
56

CHAPTER 4
Stability of Cluster Patterns in Rd
In this chapter we consider the clusters problem
Yj
= v =1
N
X
k 6=j
f(|Yj
�Yk
|) Yj
�Yk
|Yj
�Yk
|mk
(4.1)
in Rd for both d = 2 and d > 2. Given n particles in Rd, m clusters may form under a
given interaction force f when we impose the condition that n
m
2 N. Let us denote the
cluster configuration as {pd,1,p
d,2, . . . ,p
d,m}, and order the particles gathering in the ith
cluster pd,i
as Yi,j
, with j 2 {1, 2, . . . , n
m
}. In two dimensions, the positions of the clusters
p2,i will be equally distributed on the ring (see the statement of Theorem 4.1.1). Thus for
our stability analysis we consider perturbations ✏i,j on each particle such that Yi,j , so that
Yi,j = pi,j + ✏i,j .
4.1 Stability of Clusters in R2
We begin by summarizing in Theorem 4.1.1 the stability of clusters in R2 for a general
interaction kernel, f , which we then prove in the remainder of this section.
Theorem 4.1.1. Consider the discrete cluster problem (4.1) in R2 and let r satisfy the
radius condition
mX
k=1
f(2r sin⇡k
m) sin
⇡k
m= 0, (4.2)
then the m cluster configuration p2,k
=�r cos 2⇡k
m
, r sin 2⇡km
�with n
m
2 Z particles in each
cluster is stable if and only if the following two conditions are satisfied:
57

1. c? 0 and c
k 0, with c?and c
kdefined below in (4.3).
c?=
1
m
mX
k
0=1
(
f 0(2r sin ⇡k
0
m
)
2
+
f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
)
�(
f 0(2r sin ⇡k
0
m
)
2
� f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
) cos
2⇡k0
m
!,
ck=
1
m
mX
k
0=1
(
f 0(2r sin ⇡k
0
m
)
2
+
f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
)
+(
f 0(2r sin ⇡k
0
m
)
2
� f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
) cos
2⇡k0
m
!. (4.3)
2. The matrix A(l) with entries A11(l), A12(l), A21(l), A22(l) defined below in (4.4) is
non-positive definite for l 2 {0, 1, 2, . . . , ⇥m�12
⇤}.
A11(l) = A22(�l)
=
1
m
mX
k
0=1
(
f 0(2r sin ⇡k
0
m
)
2
+
f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
)(1� cos
2⇡k0(l + 1)
m),
A12(l) = A21(l)
=
1
m
mX
k
0=1
(�f 0(2r sin ⇡k
0
m
)
2
+
f(2r sin ⇡k
0
m
)
4r sin ⇡k
0m
)(cos
2⇡k0
m� cos
2⇡k0l
m). (4.4)
We prove this by classifying the cluster instabilities that may occur into two types. The
first kind of instability comes from fixing the center of mass for each cluster. Since each
particle has two principle directions of freedom, the tangential and radial directions, and
fixing the center of mass in both directions reduces two degrees of freedom for each cluster,
the total degrees of freedom for the first kind of instability is 2(n � m). The second kind
of instability comes in by considering the stability of centers of mass for the clusters by
regarding each cluster as a single particle, introducing another 2m degrees of freedom which
brings the total degrees of freedom to 2n which is the dimension of the problem. We will
classify the stability of each of these types of instabilities to prove theorem 4.1.1 .
Proof. Let ✏?k,j
represent the normal perturbation, and ✏kk,j
represent the tangential pertur-
58

bation of Yk,j
, then we can write:
Yk,j
=
2
4cos2⇡km
� sin 2⇡km
sin 2⇡km
cos 2⇡km
3
5 ·2
4r + ✏?k,j
✏kk,j
3
5 , (4.5)
where k is the index of clusters, j is the index of particles in each cluster, while r satisfies
the discrete radius condition (4.2).
First, we assume that the center of mass of each cluster is fixed, i.e.,P
j
✏?k,j
= 0 andP
j
✏kk,j
= 0 8 k 2 {1, 2, . . . ,m}. The Taylor expansion of (4.1) yields to leading order
✏?
k,j
= c?✏?
k,j
✏k
k,j
= ck✏k
k,j
(4.6)
with c?and c
kdefined in (4.3). This means that all the 2(n � m) degrees of freedom are
fully decoupled and hence independent of each other. Thus, positivity of ckor c
?determines
respectively the tangential or radial instabilities.
We next consider the second kind of instability where the center of mass for the particles
in each cluster experiences a perturbation. There are 2m degrees of freedom associated with
this type of perturbation. Since the system is finite dimensional, it su�ces to do an explicit
calculation of linear stability. Let us now consider the following configuration:
p2,k
=
2
4cos2⇡km
� sin 2⇡km
sin 2⇡km
cos 2⇡km
3
5 ·0
@
2
4r
0
3
5+
2
4✏?k
✏kk
3
5
1
A , (4.7)
with r satisfying (4.2) and2
4✏?k
✏kk
3
5 =m�1X
l=0
0
@�l
2
4cos2⇡klm
sin 2⇡klm
3
5+ l
2
4sin2⇡klm
cos 2⇡klm
3
5
1
A , (4.8)
where �m
:= �0 and m
:= 0. Taylor expansions again lead us to the following eigenvalue
problem:2
4 �l
�m�l
3
5 =
2
4A11(l) A12(l)
A21(l) A22(l)
3
5 ·2
4 �l
�m�l
3
5 ,
2
4 l
m�l
3
5 =
2
4 A11(l) �A12(l)
�A21(l) A22(l)
3
5 ·2
4 l
m�l
3
5 , (4.9)
59

with l 2 {0, 1, . . . ⇥m�12
⇤}, where A11(l), A12(l), A21(l), A22(l) are defined in (4.4). Thus, a
necessary and su�cient condition for the second kind of stability is that A(l) is non-positive
definite with l 2 {0, 1, . . . ⇥m�12
⇤}. This completes the proof of Theorem 4.1.1.
Remark 1 (Remark). The two dimensional linear systems in (4.9) reduce to one dimension
in certain cases. For the case l = m
2 with m even or l = 0, we have l = m � l and hence
�l
= �m�l
, l
= m�l
. Furthermore, we have A11(l) = A22(l) and A12(l) = A21(l). Hence
(4.9) becomes �l
= (A11(l) + A12(l))�l
and l
= (A11(l)� A12(l)) l
, and the condition that
A11(l) +A12(l) 0 and A11(l)�A12(l) 0 is equivalent to A(l) being non-positive definite.
When l = 0, it is a direct verification that A11(l) + A12(l) < 0 and A11(l) � A12(l) = 0,
corresponding to our intuition that the expansion is stable and rotation is neutrally stable.
4.2 Stability of Clusters in General Space Dimensions
The argument of cluster stability in R2 does not extend to a higher dimensional space Rd
with m clusters. However, we may consider a simple case, in which we study the linear
stability of a simplex configuration.
Let us define the vertices of a simplex in general space dimension in the following sequen-
tial way: We begin by writing the vertices of an equilateral triangle as the following three
points:
p2,1 =(r, 0), p2,2 = (r cos ✓2, r sin ✓2),
p2,3 = (r cos ✓2,�r sin ✓2), (4.10)
with ✓2 = 2⇡/3. We can naturally express the vertices of a tetrahedron using this notation
as the following four points:
p3,1 = (r, 0, 0), p3,2 = (r cos ✓3, sin ✓3p2,1),
p3,3 =(r cos ✓3, sin ✓3p2,2), p3,4 = (r cos ✓3, sin ✓3p2,3), (4.11)
with ✓3 = arccos(�13). Let us call the vertices of an equilateral triangle p2 := {p2,1 ,p2,2 ,p2,3}
a simplex in R2, and the vertices of a regular tetrahedron p3 := {p3,1 ,p3,2 ,p3,3 ,p3,4} the
60

vertices of a simplex in R3. In higher dimensions we have the following recursive relation for
pi,j :
pi,1 = (r, 0, · · · , 0),pi,j = (r cos(✓
i
), sin(✓i
)pi�1,j�1) for j � 2, (4.12)
where ✓i
= arccos(�1i
). It is easy to verify that:
pi,j
|pi,j |· p
i,j0
|pi,j0 |
= �1
ifor j 6= j0. (4.13)
and we set pi := {pi,1 , . . . ,pi,i+1} to be the vertices of a simplex in Ri. Notice that for the
vertices of a simplex to be a steady state for (4.1), we need the distance � between any
two points pi,j and pi,j0 to be exactly the zero of f . We summarize this discussion in the
following definition.
Definition 4.2.1 (Definition). A simplex configuration solution is a configuration with
clusters {pd,1,p
d,2, . . . ,p
d,d+1} as vertices of a simplex with inter-vertex distance � > 0 where
f(�) = 0. We also enforce that at each cluster pd,i
there are an equal number particles
{Yi,j
, j 2 {1, 2, . . . , n
m
}}.
Given this definition we can now write our perturbation ansatz of our simplex solution
as:
✏i,j = Yi,j
� pd,i.
We now state our main result which is that it is enough to just study the stability in R2 to
classify the stability of simplex solutions in Rd.
Theorem 4.2.2. Consider the cluster problem (4.1) in Rd, the simplex configuration solution
is a stable configuration if and only if the following two conditions are satisfied:
1. The simplex configuration in R2 is stable under tangential perturbations ✏i,j with
X
j
✏i,j = 0, 8i.
61

2. f 0(0) + d+12 f 0(�) 0.
Remark 2 (Remark). Recall that f being repulsive at short distance and attractive at long
distance implies that there is only one non-zero root of f . Thus condition 2 of Theorem 4.2.2
is well-defined.
To prove the above theorem, we make use of the following three lemmas:
Lemma 4.2.3. The simplex configuration in Rd, d > 2 is stable under tangential perturba-
tions ✏i,j of particles Yi,j withP
j
✏i,j = 0 8 i () the simplex configuration in R2 under
tangential perturbations of each particle Yi,j withP
j
✏i,j = 0 8 i.
Lemma 4.2.4. The simplex configuration in Rd is stable under normal perturbations of
particles Yi,j withP
j
✏i,j = 0 8i () 2f 0(0) + (d+ 1)f 0(�) 0.
Lemma 4.2.5. The simplex configuration in Rd is always stable under perturbations to the
positions of each cluster pd,j.
We first provide a short proof of Theorem 4.2.2 and then prove Lemmas 4.2.3-4.2.5.
Proof of Theorem 4.2.2: A general perturbation of the simplex configuration Yi,j can be
decomposed into three parts: The first being tangential perturbations with the center of
mass for each cluster fixed, i.e,P
j
✏i,j = 0 or equivalently d+1n
Pj
Yi,j = pd,i, which have
(d�1)(n�d�1) degrees of freedom; the second being normal perturbations with the center
of mass for each cluster fixed, i.e, d+1n
Pj
Yi,j = pd,i, which have n�d�1 degrees of freedom;
and finally the third being perturbations of clusters pd,i, having d(d+1) degrees of freedom.
These three kinds of perturbations are orthogonal to one another and exhaust all the nd
degrees of freedom. The third kind of perturbation always decays because of Lemma 4.2.5
and the first and second kinds of perturbations are considered in Lemmas 4.2.3 and 4.2.4,
which give the necessary and su�cient conditions for the simplex configuration to be stable
in Theorem 4.2.2.
62

p3,1
p3,2
p3,3
p3,4
c1
c2
p3,1 p3,2
p3,3
p3,4
c1
c2
oo
Figure 4.1: regular tetrahedron on sphere
Proof of Lemma 4.2.3: To prove that the tangential perturbations of the simplex configura-
tion in R2 withP
j
✏i,j = 0 8 i are stable () the tangential perturbations of the simplex
configuration in Rd withP
j
✏i,j = 0 8 i are stable for any d, it is enough to prove the
following induction statement:
8 d � 2, the tangential perturbations of the simplex configuration in Rd withP
j
✏i,j = 0
8 i are stable () the tangential perturbations of the simplex configuration in Rd+1 withP
j
✏i,j = 0 8 i are stable.
For simplicity, we prove the above statement for the base case d = 2, as the inductive
step follows similarly to this argument. A simplex configuration in d = 3, as shown in
Figure 4.1, is constructed by adding to an equilateral triangle configuration {p3,2 ,p3,3 ,p3,4} a
cluster p3,1 (in d = 2) whose projection is right on the center of the triangle {p3,2 ,p3,3 ,p3,4},with the distance between p3,1 and p3,i being � 8 i 2 {2, 3, 4}, and then enforcing that
the number of particles in each cluster to be n
4 2 R. A general tangential perturbation
{✏i,j , i 2 {1, 2, 3, 4}, j 2 {1, 2, . . . , n4}} withP
j
✏i,j = 0 can be written as a linear composition
of tangential perturbations to the ith cluster {✏i,j , j 2 {1, 2, . . . , n4}}. So our task is now to
consider the stability of perturbations of the ith cluster withP
j
✏i,j = 0 and ✏i0,j = 0 8 i0 6= i.
To classify the stability let us return our attention to Figure 4.1 and the case i = 1 for
simplicity. Let us consider the tangential perturbations {✏1,j , i 2 {1, 2, . . . , n4}} on the point
63

p3,1 , withP
✏1,j = 0. We can further decompose ✏1,j uniquely into a tangential component
✏11,j
in the plane determined by three points p3,1 , p3,2 , p3,3 and a tangential component ✏21,j
in the plane determined by three points p3,1 , p3,3 , p3,4 . The magnitude of the perturbation
✏11,j
satisfies equation (4.6) with ck determined by (4.3) and, by Taylor expanding (4.1), the
perturbation ✏11,j
has a higher order therefore negligible e↵ect on particles Y4,j located at
the point p3,4 . Thus any perturbation {✏1,j = ✏11,j, ✏
i0,j = 0, 8i0 6= 1} with arbitrary ✏11,j
andP
j
✏11,j
= 0 is an eigenvector of the linearization of (4.1) with eigenvalue ck. The same
analysis applies for ✏21,j. In general, by analyzing perturbations {✏i,j , j 2 {1, 2, . . . , n4}} for
i 2 {2, 3, 4} similarly, we find that ✏i,j satisfies the following:
✏i,j = ck✏i,j , (4.14)
with ck determined by (4.3). In another word, any perturbation {✏i,j , i 2 {1, 2, 3, 4}, j 2{1, 2, . . . , n4}} with
Pj
✏i,j = 0 8 i is an eigenvector of the linearization of (4.6) with eigen-
value ck. The value ck as calculated for m = 3 in R2 is f 0(0)f0(�)2 . This completes the base
case of d = 2.
The induction in higher dimensions is proved similarly by adding a single new point
orthogonally to the lower dimensional simplex and then showing that the original simplex
has a higher order e↵ect on the tangential linear stability of the new vertex. The details are
left to the reader. We can thus conclude that the sign of f 0(0)+ f
0(�)2 determines the stability
of tangential perturbations in Rd withP
j
✏i,j = 0 for all d � 2.
Proof of Lemma 4.2.4. Consider the simplex configuration {pd,i
: i 2 {1, . . . , d + 1}} in
Rd with n
d+1 2 N particles {Yi,j
, j 2 {1, 2, . . . , n
d+1}} in each pd,i. Let us now consider
perturbations in the normal direction ✏i,j = ✏i,jpd,i
|pd,i |to the point Y
i,j
. The leading order
interaction of particle Yi0,j0 from particle Yi,j is 1
n
f 0(�)q
d+12d (✏
i,j
+ ✏i
0,j
0)pd,i�p
d,i0
|pd,i�pd,i0 |
. Un-
der the assumption thatP
j
0 ✏i0,j0 = 0 8 i0, we have that by summing over j0 the total
leading order interaction of particles {Yi0,j0 , j
0 2 {1, 2, . . . , n
d+1}} of pd,i0 on particle Yi,j is
1d+1f
0(�)q
d+12d ✏i,j
pd,i�pd,i0
|pd,i�pd,i0 |
. If we now sum over all i0 6= i the total leading order interaction of
all the particles {Yi0,j0 , j
0 2 {1, 2, . . . , n
d+1}} on the particleYi,j as12f
0(�)✏i,j
pd,i
|pd,i |. We can also
64

easily compute the leading order interaction of all the particles {Yi,j0 , j
0 2 {1, 2, . . . , n
d+1}}in the same cluster p
d,iof particle Yi,j is 1
d+1f0(0)✏i,j
pd,i
|pd,i |. Combing all of the above leading
order interactions {Yi0,j0 , j
0 2 {1, 2, . . . , n
d+1}} has on Yi,j , we arrive at the following:
✏i,j =2f 0(0) + (d+ 1)f 0(�)
2(d+ 1)✏i,j . (4.15)
Thus, Lemma 4.2.4 is proved.
Proof of Lemma 4.2.5: We consider perturbations to the center of mass of each cluster pd,i.
In this case we need not study the dynamics of each individual particle but instead the
interactions between the clusters pd,i. This configuration is analogous to a spring system,
with a spring joining each pair pd,i
and pd,i0 . Given that f is short range repulsive and long
range attractive, each such spring has a spring constant of � 1d+1f
0(�) > 0, and the spring
force of pd,i0 on p
d,ito leading order is 1
d+1f0(�)(|p
d,i�p
d,i0 |��)pd,i�p
d,i0
|pd,i�pd,i0 |
. We can therefore
define the energy of this system to leading order as
E(pd,1,p
d,2, . . . ,p
d,d+1)
=� 1
2
X
i
0 6=i
f 0(�)
d+ 1(|p
d,i� p
d,i0 |� �)2. (4.16)
It is now straightforward to check that (4.1) to leading order is a system that describes the
gradient flow of the energy as defined by (4.16). Thus the system settles down to a local
minima of E, which is exactly the simplex configuration.
65

CHAPTER 5
Stability and Clustering of Self-Similar Solutions to
Aggregation Equations
In this chapter we investigate the self-similar solutions to aggregation equation
⇢t
= r · (⇢r(K ⇤ ⇢)) in Rd, (5.1)
with K(r) =r�
�, (5.2)
for some � > 0. The power law kernels are of special interests because when the particles
concentrate on a small spatial scale, only leading order of the kernel K is relevant. It is well
known that smooth solutions to (5.1) blow up in finite time for � 2 (0, 2), while they blow up
in infinite time for � 2 (2,1), according to the Osgood condition[BCL]. Then in [HB, HB2],
the authors study the blowup structure of the solutions both numerically and analytically,
with the conclusion that for 0 < � < 2, smooth radially symmetric initial conditions exhibit
self-similar blowup solutions of the second kind, while for 2 < � < 1, smooth radially
symmetric solutions converge to a ��ring under similarity transformation.
In this chapter, we study the linear stability of such a self-similar ��ring solution. We
find that for 2 < � < 4, the self-similar ��ring solution is linearly stable. However, for � > 4,
the self-similar ��ring solution is linearly unstable, in fact, it destabilizes into a self-similar
simplex configuration clusters. Furthermore, cluster stability theory developed in the last
chapter indicates the linear stability of that simplex configuration clusters in this case.
66

5.1 Similarity Transformation
In this section, we apply the similarity transformation as discussed in [HB, HB2], and
then derive the evolution equations for the solution to (5.1) and (5.2) concentrating on
a co-dimension one manifold. We remark here that this weak formulation generalizes the
classical Birkho↵-Rott equation in two dimensions[SUB], and has been extended to gen-
eral dimensions[VB, VUKB] to study the stability of ground states which aggregate on
co-dimension one manifolds.
To begin, we rewrite the system (5.1) and (5.2) as:
xt
= u = �Z
Rd
K 0(|x� x0|) x� x0
|x� x0|⇢(x0)dx0 (5.3)
⇢t
= �r · (⇢u), (5.4)
where x 2 Rd, u is the velocity at any point x 2 Rd and K 0(r) = r��1. We define the
similarity variables
y = xt�, ⌧ = ln t, p = t↵⇢,
with ↵ =n
� � 2and � =
1
� � 2(5.5)
which leads to the following set of equations:
y⌧
= v
=
Z
Rd
(�|y � y0|�K 0(|y � y0|)) y � y0
|y � y0|p(y0)dy0, (5.6)
p⌧
= �r · (pv). (5.7)
Remark 3. We note here that the similarity transformation has resulted in our new evolution
equations (5.6) and (5.7) to have a repulsion-attraction interaction kernel, �|y�y0|�K 0(|y�y0|). This has the e↵ect of fixing the collapsing Sd�1 solutions to be frozen and we can then
study the stability of these constant states.
The solutions we consider are co-dimension one and thus the density concentrates on a
surface. We parameterize the surface with Lagrangian parameter ⇠ 2 D ⇢ Rd�1, and denote
67

the material point position on the surface as Y(⇠); equations (5.6) and (5.7) reduce to:
Y⌧
= v
=
Z
D
(�|Y �Y0|�K 0(|Y �Y0|)) Y �Y0
|Y �Y0|P (⇠0, ⌧)dS⇠0 (5.8)
P⌧
(⇠, ⌧) = 0, (5.9)
where the density P (⇠, ⌧) has the weak formulation:
p(y, ⌧) =
Z
D
�(y �Y(⇠0, ⌧))P (⇠0, ⌧)d⇠0. (5.10)
Equation (5.9) implies P (⇠, ⌧) = P (⇠, 0). Hence equation (5.8) can be written as:
Y⌧
= v
=
Z
D
(�|Y �Y0|�K 0(|Y �Y0|)) Y �Y0
|Y �Y0|P0(⇠0)dS⇠0 , (5.11)
where P0(⇠) is the initial density. Note that one can approximate equation (5.11) by replacing
the continuous density function as a discrete set of particles {Y(⇠i
) : i = 1, 2, . . . , N}scattering on the surface {Y(⇠) : ⇠ 2 D} with mass {m
i
= p0(⇠i
)�⇠i
: i = 1, 2, . . . , N},where {⇠
i
,�⇠i
} defines the partition of D. With the notation Yi
= Y(⇠i
), we arrive at the
following discretized particle interaction equation:
@Yj
@⌧= v =
1
N
X
k 6=j
f(|Yj
�Yk
|) Yj
�Yk
|Yj
�Yk
|mk
(5.12)
with the same interacting kernel
f(|Yj
�Yk
|) = �|Yj
�Yk
|�K 0(|Yj
�Yk
|). (5.13)
The continuous equation (5.11) allows for linear stability analysis, while the discrete equation
(5.12) provides a straightforward method for simulating the fully nonlinear problem. For
simplicity of analysis, we assume the particles are equally weighted, i.e, mk
= 1 8 k.
68

5.2 Linear Stability of Shell Solutions
5.2.1 Linear Stability of Shell Solution in Rd
In this section, we apply the theory developed in Chapter 3 on the linear stability of shell
solutions. According to section 3.3, we first define
g
✓ |Y �Y0|22
◆=
f(|Y �Y0|)|Y �Y0| = � � K 0(|Y �Y0|)
|Y �Y0| . (5.14)
Then we consider a ��shell solution with radius R, which satisfies the radius condition
Z 1
�1
g(R2(1� s))(1� s)(1� s2)d�32 ds = 0, (5.15)
Let c1 and c2 be normal perturbation and tangential perturbation respectively. Then the
linearization of the system (5.12), (5.13) and (5.14) can be formulated as a scalar eigenvalue
problem[VUKB]:
�
2
4c1
c2
3
5 = Md
(m)
2
4c1
c2
3
5 =
2
4↵ + �d,m
(g1) m(d+m� 2)�d,m
(g2)
�d,m
(g2) m(d+m� 2)�d,m
(g3)/R2
3
5
2
4c1
c2
3
5 , (5.16)
with ↵ = vol(Sd�2)
Z 1
�1
(1� s2)d�32 · �g(R2(1� s)) +R2g0(R2(1� s))(1� s)2
�ds,
g1(s) = R2g0(R2(1� s))(1� s)2 � g(R2(1� s))s,
g2(s) = g(R2(1� s))(1� s), and g03(s) = �R2g(R2(1� s)). (5.17)
Here, m denotes the mode of the spherical harmonic and, for any function h smooth enough,
�d,m
(h) = vol(Sd�2)
Z 1
�1
h(s)P(d/2�1)
m
(s)(1� s2)d�32 ds, (5.18)
where P(d/2�1)
m
are Gegenbauer polynomials[S2], normalized so that Pm
(1) = 1.
We observe that g1, g2 and g3 are essentially polynomials of 1 � s, for which we have the
following formula:
�d,m
((1� s)p) = (�1)m2p+d�2vol(Sd�2)�(p+ d�12 )�(p+ 1)�(d�1
2 )
�(m+ p+ d� 1)�(1�m+ p). (5.19)
69

The necessary and su�cient condition for the system to be stable with mode m perturbation
is that the matrix Md
(m) is negative definite - that is, the trace being negative and deter-
minant being positive. Using (5.19), we obtain the following two conditions for stability of
mode m perturbation for (5.12) and (5.14):
(i) �d,m
((1� s)�2 ) < 0,
(ii) ↵ + (2R2)��22 �
d,m
((1� s)��22 ) <
2� �
2�d,m
((1� s)�2 ). (5.20)
By applying the identity (5.19), condition (i) in (5.20) can be simplified to:
(�1)m
�(1�m+ �
2 )< 0. (5.21)
One can also show that condition (ii) in (5.20) is always satisfied for d � 2 and m � 2, as it
is equivalent to the following inequality:
(3� � � d� 1
� + d� 3) +
(�1)m+1�(�2 + d� 1)�(�2 + 1)
�(m+ �
2 + d� 1)�(1�m+ �
2 )⇥
(� � 2� (m+ �
2 + d� 2)(�2 �m)
(�2 +d�32 )�2
) < 0, (5.22)
which we prove in Appendix 5.4. We first note that the only factor which now determines the
stability is (5.21). Notice also that (5.21) is independent of the dimension d. The stability
conditions are summarized in Table 5.1. Interestingly, all the modes are stable for 2 < � 4,
indicating the linear stability of the shell solution; m = 3 gives the unstable mode for all
� > 4, indicating the linear instability of the shell solution.
5.2.2 Particle Simulations on Shell Stability
In this subsection, we investigate the di↵erent regimes of (in-)stability in R2 as predicted
from Table 5.1 to see how they manifest themselves in the nonlinear dynamics. To do so we
70

@@@@@
�
mm � 2 and even m � 2 and odd
� 2 (2, 2m� 2) and
0.5 < �/4� [�/4] < 1 stable stable
� 2 (2, 2m� 2) and
0 < �/4� [�/4] < 0.5 unstable unstable
� 2 (2, 2m� 2) and neutrally neutrally
�/4� [�/4] 2 {0, 0.5} stable stable
� > 2m� 2 stable unstable
Table 5.1: Summary of the stability of Sd�1 with respect to the power � and mode m.
apply a fourth order Runge Kutta Method to (5.12) in R2 and (5.13) with initial condition
Yk
= R
0
@ cos 2⇡kN
sin 2⇡kN
1
A+ ✏? cos2⇡mk
N
0
@ cos 2⇡kN
sin 2⇡kN
1
A
+ ✏k sin2⇡mk
N
0
@ � sin 2⇡kN
cos 2⇡kN
1
A , (5.23)
where k 2 {1, 2, . . . , N}, and R satisfies the radius condition (5.15). ✏? represents the
magnitude of the perturbation in the normal direction to the circle and ✏k represents the
magnitude of the perturbation in the tangential direction to the circle.
The simulations for eight cases are plotted in Figure 5.1. The ring solutions under m = 3,
� = 3 and m = 4, � = 3 are linearly stable, and the fully nonlinear dynamics are consistent
with this. The ring solution under m = 3, � = 7 and m = 4, � = 5 deforms to three or four
clusters as predicted by Table 5.1. However, the ring solution under normal perturbation
deforms much slower than under tangential perturbation, as is shown for m = 3 and � = 7.
Moreover, in the case m = 4, � = 5, the mode 4 normal perturbation is stable while mode 4
tangential perturbation is unstable, and the mode 3 perturbation comes in through roundo↵
error and develops into three clusters.
In Figure 5.2, we plot the time evolution of (5.12) and (5.23) with m = 5, � = 40 and
71

✏k
✏?
m = 3, � = 3
⌧ = 0 2000
m = 3, � = 7
0 100 2000
m = 4, � = 3
0 2000
m = 4, � = 7
0 1000 2000
Figure 5.1: Simulations of (5.12) and (5.23) with various m and �. The ✏? on the first row
indicates that ✏k = 0 and ✏? = r0/100 for initial condition; the ✏k on the second row indicates
that ✏? = 0 and ✏k = r0/100 for initial condition. We use N = 100 particles to perform the
simulation and these structures have varying radii from 0.35� 0.6.
⌧ = �25 400 700 1000 1200 5000
⌧ = �25 400 700 1000 1200 5000
Figure 5.2: Simulations for time evolution of (5.12) and (5.23) with N = 100 particles for
m = 5(first row) and m = 7( second row), and � = 40. The initial perturbation is tangential
with ✏k = r0/100. The ⇤’s are the centers of mass.
m = 7, � = 40. We observe that the mode 5 and 7 instabilities grow and develop into
clusters. However, in both cases the long time dynamics result in a final ground state of
clusters of 3. This can be understood from the linear theory which predicts that the mode 3
eigenvalue is much larger than those corresponding to modes 5 and 7 in the case of � close
to 4, however for larger � these eigenvalues become comparable. � = 40 guarantees that the
eigenvalues for mode 5 and 7 are comparable to that of mode 3 and thus we see transient
mode 5 and mode 7 behavior until the transition to the final ground state of a 3 cluster.
In the next section we will study the cluster stability of various clusters and we will see
that even though Table 5.1 tells us that 5 and 7 perturbations of the ring solution are both
72
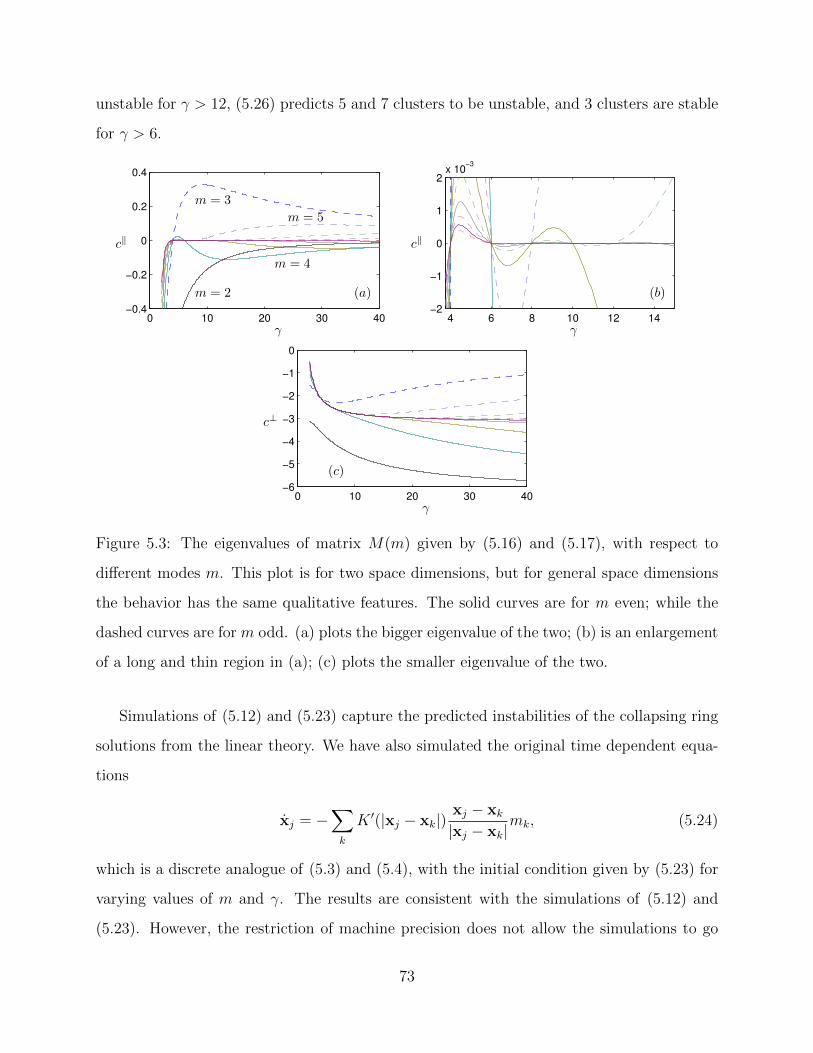
unstable for � > 12, (5.26) predicts 5 and 7 clusters to be unstable, and 3 clusters are stable
for � > 6.
0 10 20 30 40−0.4
−0.2
0
0.2
0.4
(a)m = 2
m = 3
m = 5
m = 4
�
ck
4 6 8 10 12 14−2
−1
0
1
2x 10
−3
(b)
�
ck
0 10 20 30 40−6
−5
−4
−3
−2
−1
0
(c)
�
c?
Figure 5.3: The eigenvalues of matrix M(m) given by (5.16) and (5.17), with respect to
di↵erent modes m. This plot is for two space dimensions, but for general space dimensions
the behavior has the same qualitative features. The solid curves are for m even; while the
dashed curves are for m odd. (a) plots the bigger eigenvalue of the two; (b) is an enlargement
of a long and thin region in (a); (c) plots the smaller eigenvalue of the two.
Simulations of (5.12) and (5.23) capture the predicted instabilities of the collapsing ring
solutions from the linear theory. We have also simulated the original time dependent equa-
tions
xj
= �X
k
K 0(|xj
� xk
|) xj
� xk
|xj
� xk
|mk
, (5.24)
which is a discrete analogue of (5.3) and (5.4), with the initial condition given by (5.23) for
varying values of m and �. The results are consistent with the simulations of (5.12) and
(5.23). However, the restriction of machine precision does not allow the simulations to go
73

too far in time. The simulations are not trustworthy when the collapsing ring approaches
the roundo↵ error.
The stability of all the mode m perturbations of Sd�1 as indicated by Table 5.1 agrees
exactly with the calculation of M(m) given by (5.16) and (5.17) for modes 2 to 10 for
2 < � 20. We more closely investigate the eigenvalues (and hence stability) dependence on
� in Figure 5.3. In Figure 5.3(a) we plot the bigger of the two eigenvalues, which generally
corresponds to tangential perturbations; in Figure 5.3(b) we plot the smaller of the two
eigenvalues, and mainly corresponds to the radial perturbations; and in Figure 5.3(c) we
have enlarged a thin and long region in Figure 5.3(a) that exhibits the oscillating pattern of
the behavior of the bigger eigenvalues with respect to parameter �.
In Figures 5.1 and 5.2, we see cases when Sd�1 is unstable and in each of these examples,
Sd�1 breaks up and collapses to clusters of points. In R2, the most commonly observed long
time attractor is a 3 point cluster that are 3 vertices of an equilateral triangle. In higher
dimensions this behavior continues, i.e., in R3 the generic attractor is a 4 point cluster that
forms the vertices of a tetrahedron. In the next section, we explain why we observe these
attractors by studying the stability of these cluster solutions.
74

5.3 Cluster Stability
5.3.1 Stability of Clusters in R2
By plugging in our specific kernel f defined in (5.13) to (4.3) and (4.4) in Section 4.1, we
arrive at:
c?=
1
m
mX
k
0=1
✓� � �
2(2r sin
⇡k0
m)��2 +
� � 2
2(2r sin
⇡k0
m)��2 cos
2⇡k0
m
◆,
ck=
1
m
mX
k
0=1
✓� � �
2(2r sin
⇡k0
m)��2 � � � 2
2(2r sin
⇡k0
m)��2 cos
2⇡k0
m
◆. (5.25)
8>>>>>>>>>>>>><
>>>>>>>>>>>>>:
A1,1 =1
��2 � �
2(��2)
Pm�1j=0 sin��2 ⇡j
m sin2 ⇡j(l+1)mPm�1
j=0 sin� ⇡jm
, if l 2 {0, . . . , ⇥m2⇤} and l 6= 1;
A1,2 = A2,1 = �12 +
12
Pm�1j=0 sin��2 ⇡j
m sin2 ⇡jlmPm�1
j=0 sin� ⇡jm
, if l 2 {0, . . . , ⇥m2⇤} and l 6= 1;
A2,2 =1
��2 � �
2(��2)
Pm�1j=0 sin��2 ⇡j
m sin2 ⇡j(l�1)mPm�1
j=0 sin� ⇡jm
, if l 2 {0, . . . , ⇥m2⇤} and l 6= 1;
A1,1 =1�2���2 + 2�
��2
Pm�1j=0 sin�+2 ⇡j
mPm�1j=0 sin� ⇡j
m
, if l = 1;
A1,2 = A2,1 = A2,2 = 0, if l = 1.
(5.26)
Equations (5.25) and (5.26) complete the clusters stability in R2 for f . However, since there
is no closed form ofP
m�1k
0=1 sin� ⇡k
0
m
for general � > 2, we cannot evaluate them analytically.
Therefore we numerically investigate equation (5.25) and (5.26) in the next section.
5.3.2 Numerical Simulations of Cluster Stability in R2
Figure 5.4 contains plots of (5.25) for various values of m. From the plot, we see that the
tangential stability of clusters exactly complements the stability of S1 as indicated in Figure
5.3 and Table 5.1. By comparing the stability summary Table 5.1 for S1 with the summary
Table 5.3 for cluster stability we see that, precisely when the ring is unstable (� > 4), there
is at least one cluster that is stable; yet when the ring is stable no cluster is.
Moreover when we look in Figure 5.2 (which is the large � regime) we see the 5 and 7
clusters eventually relax to the equilateral 3 cluster on longer timescales. This is understood
because the 5 and 7 clusters are saddle points which have many decaying directions but
75
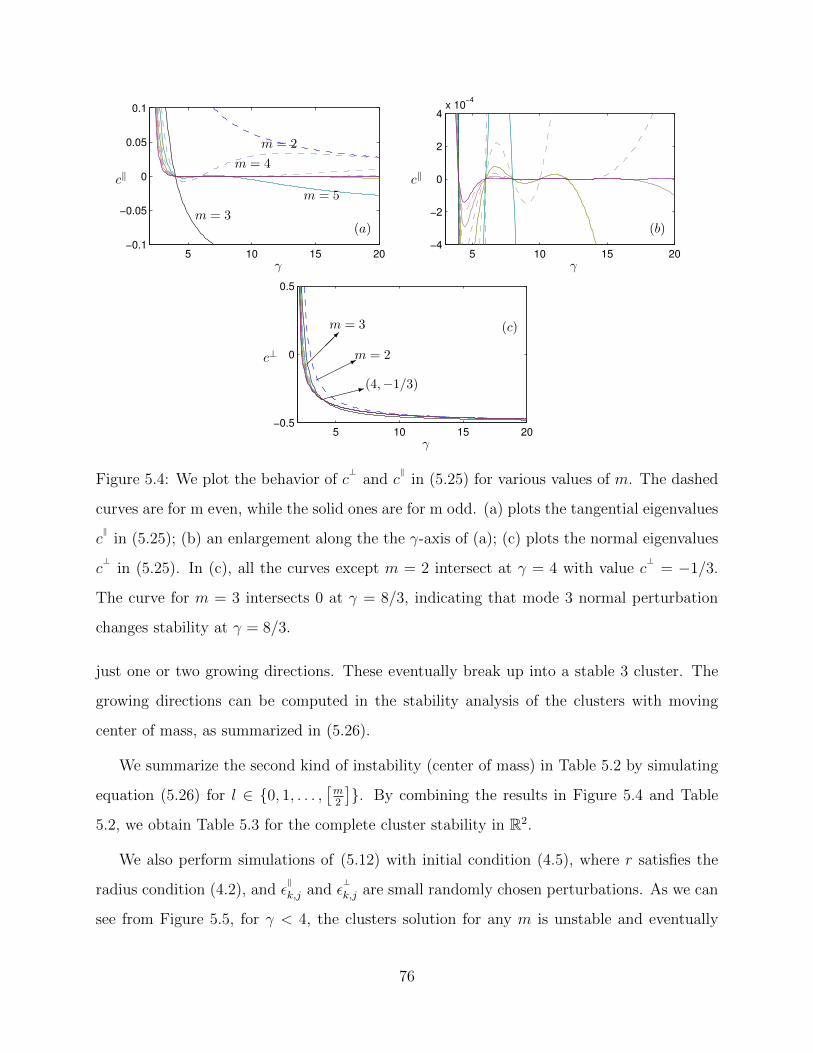
5 10 15 20−0.1
−0.05
0
0.05
0.1
(a)
m = 2
m = 3
m = 5
m = 4
�
ck
5 10 15 20−4
−2
0
2
4x 10
−4
(b)
�
ck
5 10 15 20−0.5
0
0.5
(c)
⇠⇠⇠:(4,�1/3)���*m = 2���✓m = 3
�
c?
Figure 5.4: We plot the behavior of c?and c
kin (5.25) for various values of m. The dashed
curves are for m even, while the solid ones are for m odd. (a) plots the tangential eigenvalues
ckin (5.25); (b) an enlargement along the the �-axis of (a); (c) plots the normal eigenvalues
c?in (5.25). In (c), all the curves except m = 2 intersect at � = 4 with value c
?= �1/3.
The curve for m = 3 intersects 0 at � = 8/3, indicating that mode 3 normal perturbation
changes stability at � = 8/3.
just one or two growing directions. These eventually break up into a stable 3 cluster. The
growing directions can be computed in the stability analysis of the clusters with moving
center of mass, as summarized in (5.26).
We summarize the second kind of instability (center of mass) in Table 5.2 by simulating
equation (5.26) for l 2 {0, 1, . . . , ⇥m2⇤}. By combining the results in Figure 5.4 and Table
5.2, we obtain Table 5.3 for the complete cluster stability in R2.
We also perform simulations of (5.12) with initial condition (4.5), where r satisfies the
radius condition (4.2), and ✏kk,j
and ✏?k,j
are small randomly chosen perturbations. As we can
see from Figure 5.5, for � < 4, the clusters solution for any m is unstable and eventually
76

m = 3 or m = 4 m = 5 m � 6
� 2 (2, 4] stable stable stable
� 2 (4, 6] stable stable unstable
� 2 (6,1) stable unstable unstable
Table 5.2: Stability table for center of mass of clusters, corresponding to the second kind
of instability. It is stable if and only if the eigenvalues of A(l) defined by (5.26) are all
nonpositive.
m = 3 m = 4 or m = 5 m � 6
� 2 (2, 4] unstable unstable unstable
� 2 (4, 6] stable stable unstable
� 2 (6,1) stable unstable unstable
Table 5.3: Stability table for m clusters, combining both kinds of instabilities. It is stable if
and only if conditions 1 and 2 in Theorem 4.2.2 are satisfied.
expands to a circle, but for � > 4, m clusters always deform to 3 clusters, except for some
cases when 4 < � < 6 with m 2 {4, 5} which agrees precisely with Table 5.3.
5.3.3 Stability of Clusters in Rd
We apply Theorem 4.2.2 in Chapter 4 for stability of clusters in a general dimension d. For
our particular f defined by (5.13), we have � = ��, f 0(0) = �, and f 0(�) = �1, so condition
2 of Theorem 4.2.2 reads � � 2 + 2d�1 . Thus, the simplex configuration is stable for � � 4
and unstable for 2 < � < 4.
5.3.4 Numerical Simulations on Simplex Configuration
Theorem 4.2.2 extends the simplex configuration stability in R2 to arbitrary dimensions
which allows us to conclude that for (5.12) and (5.13), the simplex configuration in Rd is
unstable for 2 < � < 4 and stable for � � 4, for d � 2.
77

� 3 5 7 9m
3
4
5
6
(a) ⌧ = 50
� 3 5 7 9m
3
4
5
6
(b) ⌧ = 10000
Figure 5.5: Numerical simulation of the m clusters problem, with m = 3, 4, 5, 6, and
� = 3, 5, 7, and 9, each hole starting with n = 20 particles with fixed-center small random
perturbation. (a) and (b) are the plot of the particles at time ⌧ = 50 and ⌧ = 10000
respectively.
To observe this phenomena we apply a Range Kutta 45 method to (5.12) with n randomly
selected points {Yi 2 Rd, i 2 {1, 2, . . . n}}. After evolving time long enough, the solution
approaches final steady state, we measure the normalized inner product of all pairs of two
points⇢
Yi
|Yi |· Y
i0
|Yi0 |, i 6= i0
�, (5.27)
and we plot both the final steady state and the probability distribution of the normalized
inner products in Figure 5.6.
It is clear from Figure 5.6 that for � = 3 (in the unstable simplex regime), Sd�1 is the
stable steady state solution for (5.12) and (5.13) while for � > 5 (in the stable simplex
regime), a the simplex solution is the attractor. We also can observe that this behavior is
independent of dimension, just as we expect. For � > 5 in Rd, we have
P✓����
Yi
|Yi |· Y
i0
|Yi0 |
+1
d
����⌧ 1
◆⇡ d
d+ 1
and P✓����
Yi
|Yi |· Y
i0
|Yi0 |
� 1
����⌧ 1
◆⇡ 1
d+ 1,
78

−0.50
0.5
−0.50
0.5
−0.5
0
0.5
−1 0 10
0.2
0.4
0.6
0.8
1
−0.20
0.2
−0.20
0.2
−0.2
0
0.2
−1 0 10
0.2
0.4
0.6
0.8
1
−0.50
0.5
−0.50
0.5
−0.5
0
0.5
−1 0 10
0.2
0.4
0.6
0.8
1
−0.20
0.2−0.20
0.2
−0.2
0
0.2
−1 0 10
0.2
0.4
0.6
0.8
1
−0.20
0.2
−0.20
0.2
−0.3−0.2−0.1
00.1
−1 0 10
0.2
0.4
0.6
0.8
1
−0.50
0.5
−0.50
0.5
−0.5
0
0.5
−1 0 10
0.2
0.4
0.6
0.8
1
(A1) (a1) (B1) (b1) (C1) (c1)
(A2) (a2) (B2) (b2) (C2) (c2)
Figure 5.6: Numerical simulation of (5.12) and (5.13) with n = 150 random initial points
in Rd. Capital letters correspond to simulations done for � = 3 and lower case letters
correspond to � = 5. First Row: Figures (A1) and (a1) are the final computed steady states
in d = 3. Similarly for (B1), (b1) in d = 4 though the plots are projected into R3 by taking
the first three coordinates. (C1) and (c1) are for d = 5 and are projections into R3 by also
taking the first three coordinates. Second Row: (A2), (a2), (B2), (b2), (C2), and (c2) are
plots of the corresponding probability distributions of the normalized inner product of any
two points in the final steady state.
indicating that our simulations are close to simplex configurations. We started these simu-
lations with random distributions of particles so these simulations suggest that the simplex
configuration may be the global attractor for any d � 2 and � � 4.
5.4 Appendix of Chapter 5: Proof of Inequality (5.22)
In proving the criteria for linear stability of Sd�1 in Section 5.2.1, the inequality (5.22) is
required. We provide a proof of this inequality here. Let us define the following quantity:
Q(�,m, d) =�(�2 + d� 1)�(�2 + 1)
�(m+ �
2 + d� 1)�(1�m+ �
2 ). (5.28)
79

Then the RHS of equation (5.22) can be written as:
(3� � � d� 1
� + n� 3) + (� � 2)(�1)m+1Q(�,m, d)
+� + 2d� 4
� + d� 3(�1)mQ(� � 2,m, d). (5.29)
The term Q(�,m, d) can be written out as the following:
Q(�,m, d) =⇧m
i=1(�
2 �m+ i)
⇧m
i=1(�
2 + d� 2 + i). (5.30)
Notice that both |�2 � m + 1| and �
2 are less than �
2 + d + m � 2, so that |Q(�,m, d)| < 1
always. Furthermore, if 2 �
2 m then |Q(�,m, d)| 1�+2d�2 and |Q(��2,m, d)| 1
�+2d�4 ;
while �
2 > m� 1 implies 0 < Q(�,m, d) < ��2m+2�+2d�2 .
We can now assert the inequality (5.22) by considering the following three cases for m � 2:
• When 4 � 2m, we have
(5.29) 3� � � d� 1
� + d� 3+
� � 2
� + 2d� 2
+� + 2n� 4
� + n� 3· 1
� + 2d� 4
=4� � � d� 2
� + d� 3� 2d
� + 2d� 2< 0
• When � > 2m, we have
(5.29) <3� � � d� 1
� + d� 3+ (� � 2)
� � 2m+ 2
� + 2d� 2
+� � 2m
� + d� 3.
80

In the case m � 3, we have
(5.29) <� d� 1
� + d� 3� (� � 2)
✓� � 4
� � 2� � � 2m+ 2
� + 2d� 2
◆
� 2m+ d� 3
� + d� 3
� d� 1
� + d� 3� (� � 2)(� � 2m+ 2)(2m+ 2d� 6)
(� � 2m+ 4)(� + 2d� 2)
� 2m+ d� 3
� + d� 3
<0;
while in the case m = 2, we have
(5.29) < � 2d(� � 2)
� + 2d� 2+
2� � 6
� + d� 3
� 2d(� � 2)
� + 2d� 2+
2� + 2d� 4
� + 2d� 2
�2 ((� � 3)(d� 1)� 1)
� + 2d� 2< 0
• When 2 < � < 4, direct calculations show that we always have (�1)m+1Q(�,m, d) < 0
and (�1)mQ(� � 2,m, d) < 0, and it is easy to see that (5.29) < 0 in this case.
The above three cases exhaust all the possibilities, and hence we conclude that the inequality
(5.22) holds for m � 2, d � 2 and � � 2.
81

CHAPTER 6
Conclusion and Future Works
In chapter 2, we derived the generalized Birkho↵-Rott equation to describe sheet-like solu-
tions of 2D active scalar problems with both gradient and divergence free flows. We present
several examples including the classical vortex sheet, superfluids, and swarming models. This
equation is applied in studying the linear wellposedness theory and weakly nonlinear theory
for the ring solutions of the kinematic aggregation model. It is interesting to understand
the stability of other sheet-like solutions, for example, concentric rings solutions. The gen-
eralized Birkho↵-Rott equation exhibits interesting interactions between the gradient and
incompressible components of the kernel. It would be interesting to understand in detail
such an interaction, for example, the relative influence on the curvature blowup time and
the density blowup time for the superfluids example.
In chapters 3 and 4, we derived the linear wellposedness theory for ring solutions and
clusters. This result has already been generalized to 3D and higher dimensions [VUKB].
However, the question of the stability analysis of a general pattern, especially a co-dimension
zero pattern still remains unknown, largely due to the di�culty of writing down the solution
form. It would be highly interesting to see the stability of the nontrivial cases in Figure
3.1. The generalization of the 2D weakly nonlinear analysis to the three dimensions is an
interesting and challenging problem because of the formulation involving spherical harmonics.
However, its solutions have the potential to predict intra-mode bifurcations, which does not
occur in 2D.
In chapters 4 and 5, We constructed a significant portion of the stability picture of the
aggregation equation with a power law interaction kernel as a dynamical system. This allows
82

us to predict when collapsing solutions will maintain spherical symmetry or when solutions
will self organize into more singular simplex configurations. However, the entire story is not
complete. Global and nonlinear stability of solutions are still open problems. Finally, the
cluster problem in arbitrary dimensions with a general (non-simplex) configuration remains
open.
83

References
[AG] C. Anderson and C. Greengard, On vortex methods, SIAM J. Numer. Anal.,22(3):413–440, 1985.
[B] G. Birkho↵, Helmholtz and Taylor Instability Hydrodynamics Instability, Proceed-ings of the Symposium on Appied Mathematics, 13, 55-76, 1962.
[BB] A. L. Bertozzi and J. Brandman, Finite-time blow-up of Linfty-weak solutions of anaggregation equation, Commun. Math. Sci., 8(1): 45-65, 2010.
[BCCVG] E. Ben-Jacob, I. Cohen, A. Czirok, T. Vicsek, and D.L. Gutnick, Chemomodula-tion of cellular movement, collective formation of vortices by swarming bacteria, andcolonial development, Phys. A, 238, 181197, 1997.
[BCL] A. L. Bertozzi, J. A. Carrillo, and T. Laurent, Blow-up in multidimensional ag-gregation equations with mildly singular interaction kernels, Nonlinearity 22: 683,2009.
[BD] M. Burger and M. Di Francesco, Large time behavior of nonlocal aggregation modelswith nonlinear di↵usion, Networks Heterog. Media 3(4): 749-785, 2008.
[BL] A. L. Bertozzi and T. Laurent, Finite-time blow-up of solutions of an aggregationequation in Rn , Commun. Math. Phys., 274(3): 717-735, 2007.
[BL2] A. L. Bertozzi and T. Laurent, The behavior of solutions of multidimensional aggre-gation equations with mildly singular interaction kernels, Chin. Ann. Math. Ser. B,30(5):463–482, 2009.
[BL2] J.L. Burchnall and A. Lakin, The theorems of Saalschutz and Dougall, Quart. J.Math. 2, 161-166, 1950.
[BCL] A. L. Bertozzi, J. A. Carrillo and T. Laurent, Blow-up in multidimensional aggrega-tion equations with mildly singular interaction kernels, Nonlinearity, 22(3):683–710,2009.
[BV] M. Bodnar and J. J. L. Velazquez, An integro-di↵erential equation arising as a limitof individual cell-based models, J. Di↵er. Equations 222(2): 341380, 2006.
[C] P. Constantin, Geometric statistics in turbulence, SIAM Rev., 36(1):73-98, 1994.
[C2] Y. Chuang, Stability and Scalability of 2D Swarming Patterns, (Ph.D. Thesis), 2006.
[CDFLS] J. A. Carillo, M. DiFrancesco, A. Figalli, T. Laurent, and D. Slepcev, Global-in-time weak measure solutions and finite-time aggregation for nonlocal interactionequations, Duke Math. J., 156: 229, 2011.
84

[CDMBC] Y. L. Chuang, M. R. D’Orsogna, D. Marthaler, A. L. Bertozzi, and L. Chayes,State transitions and the continuum limit for a 2D interacting, self-propelled particlesystem, Physica D: Nonlinear Phenomena, 232(1):pp. 33-47,2007.
[CHDB] Y.-L. Chuang, Y. R. Huang, M. R. D’Orsogna, and A. L. Bertozzi, Multi-vehicleflocking: scalability of cooperative control algorithms using pairwise potentials, IEEEInternational Conference on Robotics and Automation, 2292-2299, 2007.
[CK] H. Cohn and A. Kumar, Algorithmic design of self-assembling structures, PNAS,106(24): 95709575, 2009.
[CL] R. E. Caflisch and J. S. Lowengrub, Convergence of the vortex method for vortexsheets, SIAM Journal on Numerical Analysis, 26(5):pp. 1060–1080, 1989.
[CMT] P. Constantin, A. J. Majda and E. Tabak. Formation of strong fronts in the 2Dquasigeostrophic thermal active scalar, Nonlinearity, 7(6):1495–1533, 1994.
[DCBC] M.R. D’Orsogna, Y.L. Chuang, A.L. Bertozzi and L.S. Chayes, Self-propelled Par-ticles wit hSoft-core Interactions: Patterns, Stability and Collapse, Phys Rev Lett.,96(10), 2006.
[DL] F. J. Dyson and A. Lenard, Stability of matter I., Journal of Mathematical Physics,8:423434, 1967.
[DP] Q. Du and P. Zhang, Existence of weak solutions to some vortex density models,SIAM Journal on Mathematical Analysis, 34(6):1279–1299, 2003.
[DVM] R. Daniels, J. Vanderleyden and J. Michiels, Quorum sensing and swarming migra-tion in bacteria, FEMS Microbiology Reviews, 28(3): 261–289, 2004.
[EWG] L. Edelstein-Keshet, J. Watmough and D. Grurunbau, Do travelling band solu-tions describe cohesive swarms? an investigation for migratory locusts, Journal ofMathematical Biology, 36(6): 515549, 1998.
[HLK] T. Y. Hou, J. Lowengrub and R. Krasny, Convergence of a point vortex method forvortex sheets, SIAM Journal on Numerical Analysis, 28(2):pp. 308–320, 1991.
[HB] Y. Huang and A. L. Bertozzi, Self-similar blowup solutions to an aggregation equa-tion in Rn, SIAM Journal on Applied Mathematics, 70(7):2582–2603, 2010.
[HB2] Y. Huang and A. L. Bertozzi, Asymptotics of blowup solutions for the aggregationequation, DCDS, 17(4):1309–1331, 2012.
[HKM] D. Helbing, J. Keltsch and P. Molnr Modelling the Evolution of Human Trail Sys-tems, Nature, 388: 47-50, 1997.
[KHP] T. Kolokolnikov, Y. Huang and M. Pavlovskia, Singular patterns for an aggregationmodel with a confining potential, Physica D: Nonlinear Phenomena, 2012.
85

[KSUB] T. Kolokolnikov, H. Sun, D. Uminsky and A. L. Bertozzi, Stability of ring patternsarising from two-dimensional particle interactions, Phys. Rev. E, 84(1), 2011.
[K] R. Krasny, Desingularization of periodic vortex sheet roll-up, J. Comput. Phys.,65(2):292–313, 1986.
[K2] R. Krasny, Computation of vortex sheet roll-up in the Tre�tz plane, J. Fluid Mech.,184:123–155, 1987.
[KS] E. F. Keller and L. A. Segel, Initiation of slime mold aggregation viewed as aninstability, J. Theor. Biol., 26:399–415, 1970.
[L] A. Leonard, Vortex methods for flow simulation, J. Comput. Phys., 37(3):289–335,1980.
[L2] T. Laurent, Local and global existence for an aggregation equation, Commun.Partial Di↵er. Equ., 32(12): 1941-1964, 2007.
[LLE] R. Lukeman, Y. X. Li, L. Edelstein-Keshet, How do ducks line up in rows: inferringindividual rules from collective behaviour, PNAS, 107(28): 12576-12580, 2010.
[LRC] H. Levine, W. J. Rappel, and I. Cohen, Self-organization in systems of self-propelledparticles, Phys. Rev. E, 63(1), 2000;
[MB] A. J. Majda and A. L. Bertozzi, Vorticity and Incompressible Flow, CambridgeUniversity Press, 2002.
[MZ] N. Masmoudi and P. Zhang. Global solutions to vortex density equations arisingfrom sup-conductivity, Ann. Inst. H. Poincare Anal. Non Lineaire, 22(4):441–458,2005.
[MZDT] N. Mate, A. Zsuzsa, B. Dora and V. Tams, Hierarchical group dynamics in pigeonflocks Nature, 464, 890–893, 2010.
[O] L. Onsager, Electrostatic interaction of molecules, Journal of Mathematical Physics,43: 189196, 1939.
[OMB] A. Ordemann, F. Moss, and G. Balazsi, Motions of Daphnia in a light field: Randomwalks with a zooplankton, Nova Acta Leopoldina, 88: 87103, 2003.
[P] E. G. Puckett, A study of the vortex sheet method and its rate of convergence, SIAMJ. Sci. Stat. Comput., 10: 298-327, 1989.
[PE] J.K. Parrish and L. Edelstein-Keshet, Complexity, pattern, and evolutionary trade-o↵s in animal aggregation, Science, 284: 99101, 1999.
[PVG] J. Parrish, S. V. Viscido, and D. Grunbaum, Self-organized fish schools: an exami-nation of emergent properties, Biology Bulletin, 202:296305, 2002.
86

[R] D. Ruelle, Statistical Mechanics, Rigorous Results, New York: W.A. Benjamin,1969.
[R2] W. L. Romey, Individual di↵erences make a di↵erence in the trajectories of simulatedschools of fish, Ecological Modelling, 92(1): 65-77, 1996.
[RB] H. Reuter and B. Breckling, Selforganization of fish schools: an object- orientedmodel, Ecological Modelling, 75/76:147159, 1994.
[RNSL] W.J. Rappel, A. Nicol, A. Sarkissian, and H. Levine, Self-organized vortex state intwo-dimensional Dictyostelium dynamics, Phys. Rev. Lett., 83: 12471250, 1999.
[RST] M. C. Rechtsman, F. H. Stillinger, and S. Torquato, Optimized Interactions forTargeted Self-Assembly: Application to a Honeycomb Lattice, Phys. Rev. Lett.,95(22): 2005.
[RST2] M. C. Rechtsman, F. H. Stillinger, and S. Torquato, Synthetic diamond and wurtzitestructures self-assemble with isotropic pair interactions, Phys. Rev. E, 75(3): 2007.
[S] M. J. Shelley, A study of singularity formation in vortex-sheet motion by a spectrallyaccurate vortex method, Journal of Fluid Mechanics, 244:493-526, 1992.
[S2] G. Szego, Orthogonal polynomials, American Mathematical Society, 1975
[S3] L.J. Slater, Generalized Hypergeometric Functions, Cambridge University Press,1966.
[S4] T. C. Schneirla, Army Ants: A Study in Social Organization, Freeman & CompanyW. H., 1971.
[SB] P. Sa↵man and G. Baker, Vortex Interactions, Ann. Rev. Fluid Mech. , 11, 95-122,1979.
[SSBF] C. Sulem, P.-L. Sulem, C. Bardos and U. Frisch, Finite time analyticity for the two-and three-dimensional Kelvin-Helmholtz instability, Comm. Math. Phys., 80(4):485–516, 1981.
[SUB] H. Sun, D. Uminsky and A. L. Bertozzi, A Generalized Birkho↵Rott Equation forTwo-dimensional Active Scalar Problems, SIAM J. Appl. Math., 72:382-404, 2012.
[SUB2] H. Sun, D. Uminsky and A. L. Bertozzi, Stability and clustering of self-similarsolutions of aggregation equations, J. Math. Phys. Special Issue on IncompressibleFluids, Turbulence and Mixing, 53(11), 2012.
[TB] C. M. Topaz and A. L. Bertozzi, Swarming patterns in a two-dimensional kinematicmodel for biological groups, SIAM Journal on Applied Mathematics, 65(1):152–174,2004.
87
[TT] J. Toner and Y. Tu, Long-range order in a two-dimensional dynamical xy model:how birds fly together, Phys. Rev. Lett., 75(23): 43264329, 1995.
[VB] J. H. von Brecht and A. L. Bertozzi Well-posedness theory for aggregtion sheets,Communications in Mathematical Physics, 2012.
[VBDFFVM] N. Verstraeten, K. Braeken, B. Debkumari, M. Fauvart, J. Fransaer, J. Ver-mant and J. Michiels, Living on a surface: swarming and biofilm formation, Trendsin Microbiology, 16(10):496–506, 2008.
[VU] J. H. von Brecht and D. Uminsky, On Soccer Balls and Linearized Inverse StatisticalMechanics, Journal of Nonlinear Science, 22(6):935–959, 2012.
[VUKB] J. H. von Brecht, D. Uminsky, T. Kolokonikov and A. L. Bertozzi, Predictingpattern formation in particle interactions, M3AS, 22(supp01), 1140002, 2012.
[W] E. Weinan, Dynamics of vortex liquids in Ginzburg-Landau theories with applica-tions to superconductivity, Phys. Rev. B, 50(2):1126–1135, 1994.
[Y] V. I. Yudovich. Non-stationary flow of an ideal incompressible liquid, USSR Com-putational Mathematics and Mathematical Physics, 3(6):14071456, 1963.
88

















![On a Class of Singular Integral Equations* - core.ac.uk · by f. tricomi [4] and h. sohngen ... d* 1 - on a class of singular integral equations f . bueckner . on a class of singular](https://img.pdfslide.net/doc/110x75/5b7941827f8b9a703b8d4424/on-a-class-of-singular-integral-equations-coreacuk-by-f-tricomi-4-and.jpg)











