Embed Size (px)
Citation preview

Global Navigation
Satellite Systems
- uma introdução
“ Imagine, accurate positioning dropping right out of the sky at
the touch of a button!”
Jeff Hurn for Trimble Navigation, 1993
Sistemas Globais de
Posicionamento por Satélite

O uso de referências exteriores à Terra sempre se prefigurou como abordagem natural ao problema da determinação de posição. Os satélites artificiais, sendo o sistema GPS o de uso mais alargado, situam-se nessa linha de evolução e trouxeram a possibilidade de determinação de coordenadas de um modo simples e com equipamento de baixo custo. A utilização para fins topográficos ou geodésicos é distinta da utilização para navegação, reque-rendo diferente metodologia e diferente equipamento.
Obs. de Uraniborg
McD
onald
Obs.
–Texas U
niv
.
Spatial positioning

Posicionamento astronómico
Radar e Distanciómetro – II Guerra Mundial
TRANSIT
Sistema para navegação (baixa precisão) Processamento Doppler permite precisão submétrica
1970
VLBI Very Long Baseline Interferometry
SLR Sattelite Laser Ranging

VERY LONG BASELINE INTERFEROMETRY
Observações de um emissor (objeto) que são feitas em simultâneo por um conjunto de recetores (telescópios) cuja combinação emula um grande recetor

Goddard Geophysical and Astronomical Observatory. LAGEOS
SATELLITE LASER RANGING
LUNAR LASER RANGING
Laser Ranging Station no McDonald Observatory
Satélites com retrorrefletores;
medição de precisão milimétrica útil em
estudos de geodinâmica

1978 – 1.º satélite do bloco I
1989 – 1.º satélite bloco II
1985 – 10 satélites bloco I
1994 – Operacionalidade
2000 – GPS S/A desativado (selective availability) permitindo aos utilizadores a receção de sinal não degradado
1973 Navigation System with Timing and Ranging Global Positioning System (Directiva do DoD para a sua criação)
1981 – 1.º recetor código/fase

OBJETIVO
Determinar posição, tempo e velocidade
PRINCÍPIO BÁSICO
Medição de pseudo-distâncias satélite-recetor
APLICAÇÕES
Navegação (mar, terra, ar) Geodesia e geodinâmica Topografia e cartografia SIG
Segmento espacial Segmento de controlo Segmento do utilizador
COMPONENTES
GPS GLONASS BeiDou GALILEO BeiDou-2 IRNSS
EXEMPLOS

GPS – Global Positioning System (o mais usado dos GNNS)
Satélite do Bloco II

Constelação de 24 satélites: 8 por plano orbital
Altitude: 20200 km
Período: 11h58m
Período da constelação: 23h56m
Inclinação: 50o (desvio relativo ao equador)
GPS – SEGMENTO ESPACIAL

GPS – SEGMENTO DE CONTROLO
4 Estações de Monitorização (Havai e Kwajalein, no Pacifico; Diego Garcia, no Índico e Ascensão, no Atlântico) para obtenção de informações acerca do comportamento de cada satélite e envio das correções calculadas em Colorado Springs
1 Estação de Controlo (Schriever Air Force Base - Colorado Springs) para cálculo de correções às efemérides e aos parâmetros de relógio

GPS – SEGMENTO DO UTILIZADOR
“CIVIL” : SPS (~10m de precisão posicional)
“MILITARY – USA”: PPS (~1m)
SA - SELECTIVE AVAILABILITY (desativado desde maio de 2000) – degradação intencional AS – “Anti Spoofing” (encriptado, para evitar acesso público ao código P)

Novos satélites (Bloco IIR-M, IIF) Mudança do sinal: L1 e L2 (mais potência de sinal) Adição de novo sinal (L5) Ciração de novos códigos
- L2C (Civilian L2) - M (Militar)
Próxima geração - GPS III: NASA pediu que os satélites
do bloco III tivessem retrorrefletores laser: permite o acompanhamento da órbita dos satélites independente dos sinais de rádio, o que possibilita os erros de relógio dos satélites serem analisados separadamente dos erros das efemérides.
GPS – EVOLUÇÃO DO SISTEMA
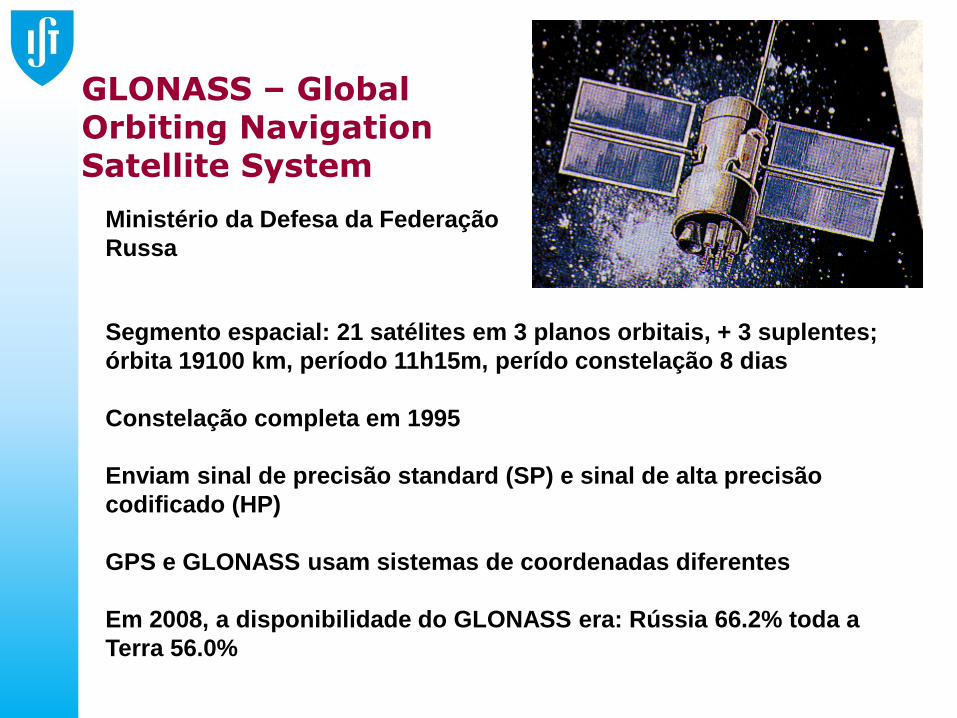
GLONASS – Global Orbiting Navigation Satellite System
Ministério da Defesa da Federação
Russa
Segmento espacial: 21 satélites em 3 planos orbitais, + 3 suplentes;
órbita 19100 km, período 11h15m, perído constelação 8 dias
Constelação completa em 1995
Enviam sinal de precisão standard (SP) e sinal de alta precisão
codificado (HP)
GPS e GLONASS usam sistemas de coordenadas diferentes
Em 2008, a disponibilidade do GLONASS era: Rússia 66.2% toda a
Terra 56.0%

SEGMENTO ESPACIAL
30 satélites (órbita 24 000 km, ~ 4 000km
mais que o GPS) em 3 planos orbitais,
inclinação 56º. 9+1 satélites por plano orbital.
SEGMENTO DE CONTROLO
2 centros principais na Europa Central
GALILEO – European Satellite Navigation System
Comissão Europeia e ESA
Em 2007 os 27 ministros os transportes da EU anunciaram a operacionalidade em 2013, adiada para 2019

Quatro futuros serviços de navegação distintos:
•Open Service (OS), acesso livre. Precisão <4 m (horiz.); <8 m
(vert.) em uso simultâneo de ambas as bandas OS; Banda única
<15 m (h.) / <35 m (v.)
•Commercial Service (CS), encriptado, disponível mediante
subscrição paga. Precisão < 1 m. Quando complementado com
estações terrestres: <10 cm.
•Public Regulated Service (PRS) e Safety of Life Service (SoL),
ambos encriptados, precisão semelhante ao OS. Robustez contra
jamming e deteção de problemas em 10 segundos. Uso exclusivo
por forças policiais e militares, e utilizadores críticos (controlo
aéreo, aterragem automática, etc.), respetivamente.
GALILEO – European Satellite Navigation System


6 seconds
4 seconds
AB
Num mundo perfeito

6 seconds4 seconds
5 seconds(wrong time)
7 seconds(wrong time)
AB
atraso hipotético de 1s nos relógios dos recetores

6 seconds4 seconds
8 seconds
AB
C
de novo num mundo perfeito

5 seconds(wrong time)
7 seconds(wrong time)
9 seconds(wrong time)
BA
C
atraso hipotético de 1s nos relógios dos recetores

OPERAÇÃO
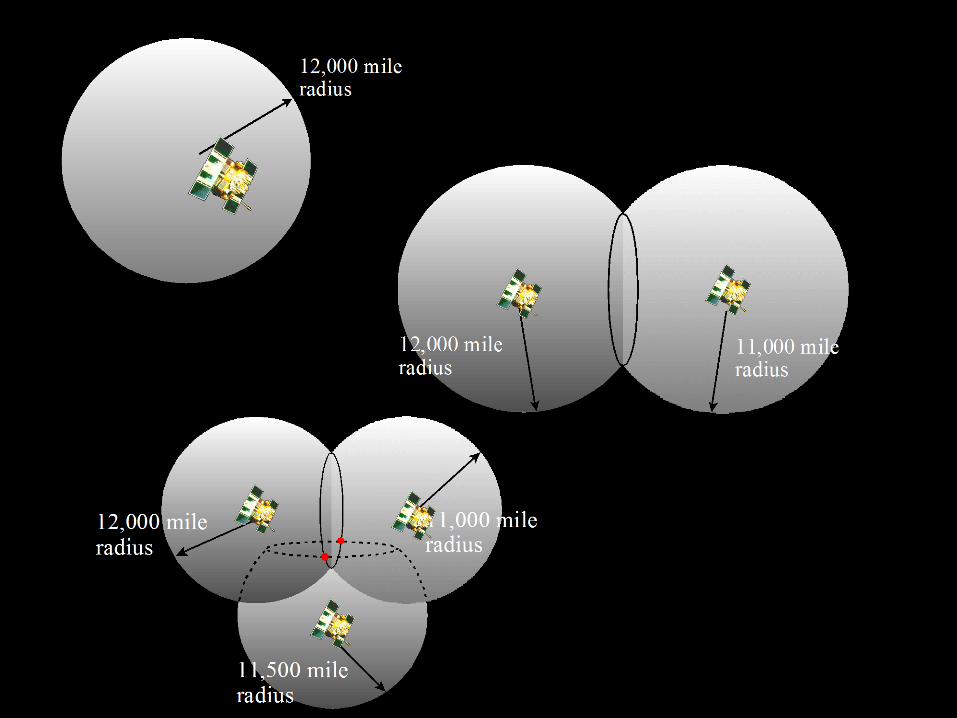
A base operativa de um GNSS é a triangulação a partir da posição dos satélites: para triangular, um recetor GNSS estima a distância usando o intervalo entre emissão e receção dos sinais de rádio
Para se poder estimar esse intervalo, um GNSS precisa de registar com elevada precisão o tempo
Tal como a distância, a posição dos satélites tem de ser conhecida. A geometria das órbidas e o controlo constante destas são elementos críticos
A correção de atrasos sofridos pelo sinal ao longo da atmosfera deve ser tida em conta

Fo=10,23 MHz
L1= 154xFo = 1575.42 MHz (19,0cm compr. onda)* L2= 120xFo = 1227.60 MHz (24,4cm)
C/A (Coarse/Acquisition) 1.023 MHz P (Precise) 10.23 MHz
EXEMPLO: SINAL GPS
(oscilação de referência da onda portadora)
Código
* this makes the carrier signal act as a much more accurate reference than the pseudo random code by itself
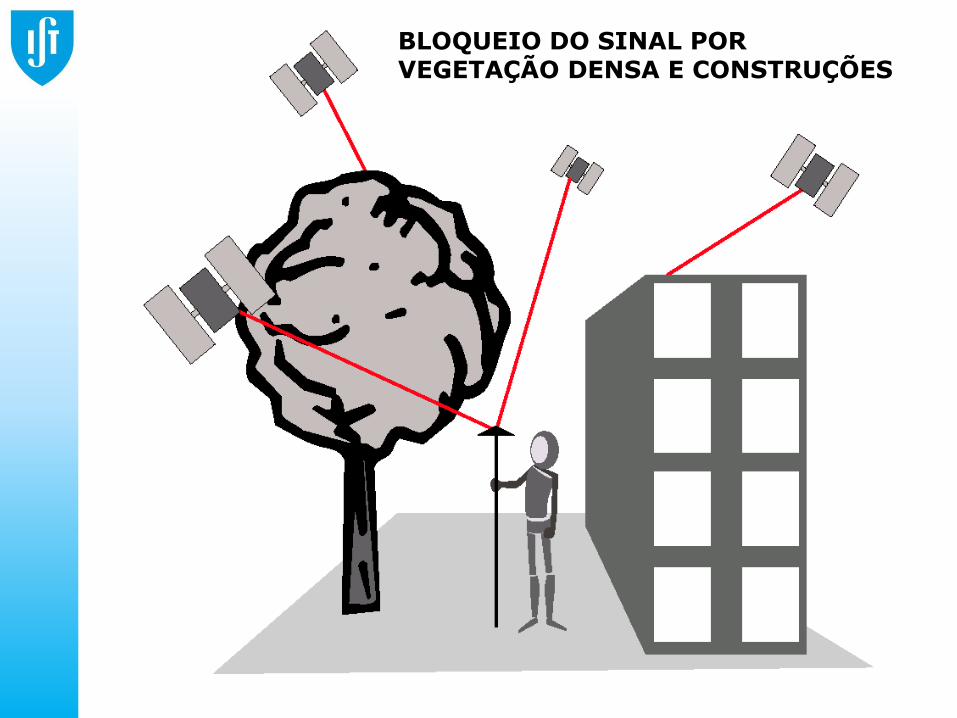
BLOQUEIO DO SINAL POR VEGETAÇÃO DENSA E CONSTRUÇÕES

r r
r
r
1
2 3
4 t o
t 1 r 4 = t 1 t o v ( - )
PSEUDODISTÂNCIA (Pseudo-Range)

.)()()(
,)()()(
,)()()(
,)()()(
2424244
2323233
2222222
2121211
kkkkk
kkkkk
kkkkk
kkkkk
cdtZZYYXX
cdtZZYYXX
cdtZZYYXX
cdtZZYYXX
(Xi,Yi,Zi) – Posição do satélite i (Xk,Yk,Zk) – Posição do recetor dtk – Estado do relógio do recetor
Determinação de coordenadas em função da pseudodistância

D t
USO DE CÓDIGO
Sinal gerado no recetor
Sinal recebido do satélite

Número completo e inteiro de ciclos desde o momento da emissão até à receção da fase da onda portadora
UTILIZAÇÃO DA ONDA PORTADORA

É necessário determinar a ambiguidade da fase da onda portadora para que se possa usar a sua informação como medição de distâncias ao longo do tempo
Época (0)
Ambiguidade
Época (i)
Ambiguidade
Nº de ciclos já contados Fase medida
Fase medida

TÉCNICAS PARA FIXAÇÃO DE AMBIGUIDADES

MODOS DE OPERAÇÃO

POSICIONAMENTO ABSOLUTO E POSICIONAMENTO DIFERENCIAL
Exemplo de situação de
posicionamento GPS
Precisão
posicional
aprox.
Absoluto 5m a 15m
WADGPS (com auxílio de estações
terrestres – correção diferencial
regional)
~4m
DGPS (diferencial, com código
apenas, base < 40 km, 3 a 5
minutos de estacionamento)
~0,5m
DGPS (diferencial, com código
apenas, base < 300 km, 3 a 5
minutos de estacionamento)
~2m
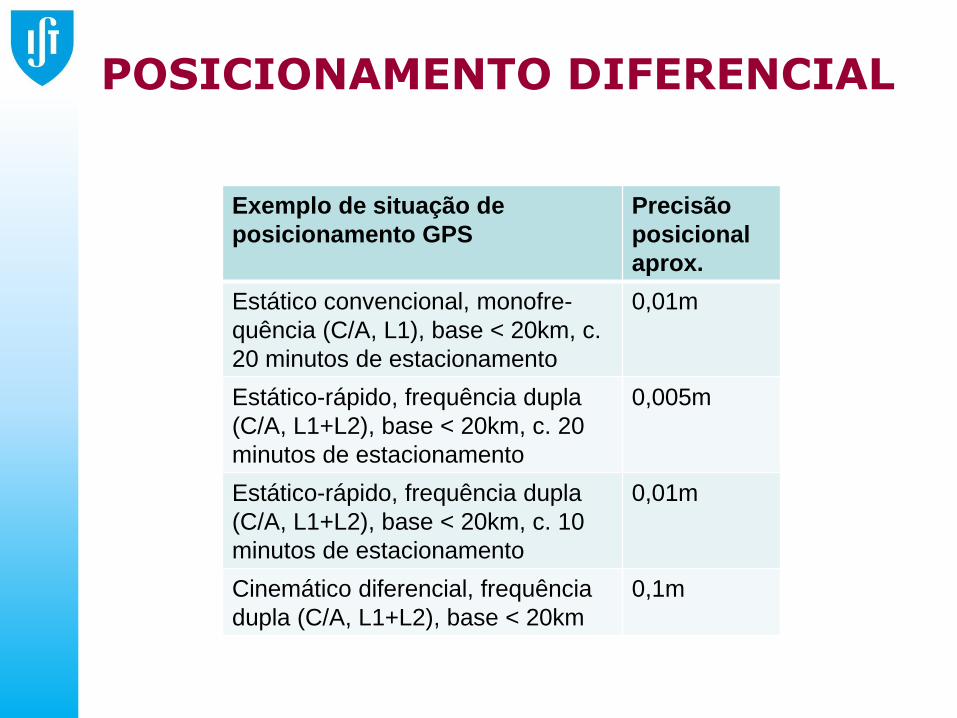
POSICIONAMENTO DIFERENCIAL
Exemplo de situação de
posicionamento GPS
Precisão
posicional
aprox.
Estático convencional, monofre-
quência (C/A, L1), base < 20km, c.
20 minutos de estacionamento
0,01m
Estático-rápido, frequência dupla
(C/A, L1+L2), base < 20km, c. 20
minutos de estacionamento
0,005m
Estático-rápido, frequência dupla
(C/A, L1+L2), base < 20km, c. 10
minutos de estacionamento
0,01m
Cinemático diferencial, frequência
dupla (C/A, L1+L2), base < 20km
0,1m

Emissão da correção diferencial
Estações Costeiras (Beacon Stations) Satélites Geoestacionários (Racal/OmniStar) Antenas Retransmissoras de Telemóvel (GSM) Outro Recetor (via Rádio)
RTCM=Radio Technical Commission for Maritime Services (Standard para transmissão de correções diferenciais)

EGNOS- European Geostationary Navigation Overlay Service (perspetivas: melhorar a precisão posicional de 20m para 2m)
•SEGMENTO ESPACIAL
•Três satélites geostacionários (uma órbita geoestacionária (GEO) é
uma órbita geossíncrona diretamente sobre a linha equatorial da Terra)
•Inmarsat III Atlantic Ocean region – East (15.5ºW)
•ESA ARTEMIS (21.5ºE)
•Inmarsat III F5 (25ºE)
Ainda:
Informação precisa da posição
de cada satélite GPS;
Informação sobre os relógios a
bordo;
Parâmetros ionosféricos

SEGMENTO DE CONTROLO
34 estações terrestres Estações de controlo principais
SEGMENTO DO UTILIZADOR

WAAS – Wide Area Augmentation System
Desenvolvido por: Federal Aviation Administration (FAA) e
Department of transportation (DOT)
OPERAÇÃO:
25 estações terrestres localizadas nos EUA; 2 estações de
controlo
Recebem a informação GPS,
determinam e enviam as correcções a
aplicar aos dados GPS ( derivas orbitais,
erros do relógio, atrasos ionosféricos e
troposféricos)
USO: América do Norte e Europa Ocidental
Operacional Set. 2002 : precisão posicional horizontal 1-2 m
e vertical 2-3 m

Áreas geográficas com cobertura WAAS, EGNOS e MSAS

Recetores para posicionamento absoluto
Muitos recetores futuros processarão sinais GPS C/A e Galileo OS para máxima cobertura.
sistemas para navegação de veículos
sistemas para navegação de recreio

Demarcação da fronteira Timor-Leste / Indonésia
Trimble Geo-Explorer 2005
O posicionamento
diferencial pode ser em
tempo real ou pós-
processado
Recetores para posicionamento diferencial

Levantamento de gravuras paleolíticas, Vale do Côa
DGPS receivers (real time or post-processing)

DEPOIS DA CORREÇÃO DGPS
ANTES DA CORREÇÃO DGPS
EXEMPLO NO IST

B A
POSICIONAMENTO RELATIVO
Estático
Convencional Rápido-estático
Cinemático
Real Time Kinematic (RTK) Pós-processado

RENEP REDE NACIONAL DE ESTAÇÕES PERMANENTES (INSTITUTO GEOGRÁFICO PORTUGUÊS)
Cascais
Ponta Delgada

Para bases longas (>20Km), onde é exigida a maior precisão possível Técnica indicada para implementação de redes geodésicas Técnica ideal para grandes áreas
Para bases com comprimento até 20Km Curtos períodos de ocupação O mais utilizado para grande produtividade de trabalho
Modo estático
Modo rápido-estático
TEMPO DE ESTACIONAMENTO

Utilizado para caracterização da trajectória de um objecto em movimento (medições contínuas) Útil para levantamento de eixos de via e completagem cartográfica, entre outras aplicações
POSICIONAMENTO CINEMÁTICO

Não é necessário o Pós-Processamento Resultados disponíveis no momento da observação Aplicações em navegação
RTK – Cinemático em Tempo Real

Recetores de Mono Frequência
Medição da base com precisão de 2 cm + 1 ppm (rms) Utilizam a onda portadora L1 Utilizados essencialmente em aplicações topográficas com comprimentos de bases não superiores a 15 Km Solução menos dispendiosa mas de maior dificuldade para obter as precisões mencionadas

Medição da base com precisão de 3 mm + 0.5 ppm (rms) Utilização em Geodesia e Topografia : Redes Geodésicas, Geodinâmica, Densificações de Rede, Controlo Fotogramétrico, Detalhe Topográfico
Recetores de Dupla Frequência

Multitrajeto
Fontes do erro

Atraso ionosférico
Fontes do erro

Receiv
er
nois
e
Multi-
pa
th
Sate
l. c
locks
Tro
posp
here
Ephe
meris
Ionosphere
0
10
20
30
40
m
Importância relativa do erro

Propagação do erro
PDOP – Position Dilution of Precision
HDOP – Horizontal Dilution of Precision
VDOP – Vertical Dilution of Precision

Questões de revisão
1. Defina ângulo de mascara e indique a importância da sua definição na
recolha dos dados com um recetor GPS.
2. Com recurso ao Sistema de Posicionamento Global (GPS), descreva,
justificando, situações em que seja conveniente a utilização dos
seguintes tipos de posicionamento:
i) Modo Absoluto, recolha dos dados em modo cinemático, observação
de código;
ii) Modo Diferencial Pós-Processado, recolha dos dados em modo
estático, observação de código e fase;
iii) Modo Diferencial em Tempo Real, recolha dos dados em modo
estático, observação de código e fase;
iv) Modo Diferencial Pós-Processado, recolha dos dados em modo
cinemático, observação de código e fase.