-
Minc MRC Controller
SK16 Dual MRCManipulator ManualPart Number 140067-2
March 31, 1998
MOTOMAN805 Liberty Lane
West Carrollton, OH 45449TEL: (937) 847-6200 FAX: (937)
847-627724-HOUR SERVICE HOTLINE: (937) 847-3200
The information contained within this document is the
proprietary property of Motoman, Inc., andmay not be copied,
reproduced or transmitted to other parties without the expressed
written
authorization of Motoman, Inc.
©1998 by MOTOMANAll Rights Reserved
Because we are constantly improving our products, we reserve the
right to change specificationswithout notice. MOTOMAN is a
registered trademark of YASKAWA Electric Manufacturing.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Dual MRC Manipulator Manual i MOTOMAN
SK16 DUAL MRC MANIPULATOR MANUAL
TABLE OF CONTENTS Chapter/Section Page
CHAPTER 1 INTRODUCTION
CHAPTER 2 SAFETY
1
INTRODUCTION........................................................................................1-1
2 STANDARD
CONVENTIONS......................................................................2-1
3 GENERAL SAFEGUARDING
TIPS..............................................................3-1
4 MECHANICAL SAFETY
DEVICES...............................................................4-1
5 INSTALLATION SAFETY
...........................................................................5-1
6 PROGRAMMING SAFETY
.........................................................................6-1
7 OPERATION SAFETY
................................................................................7-1
8 MAINTENANCE SAFETY
...........................................................................8-1
CHAPTER 3 SK16 MANIPULATOR INSTRUCTIONS
1 RECEIVING
...............................................................................................1-1
2 INSTALLATION
.........................................................................................2-1
3 WIRING
....................................................................................................3-1
4
SPECIFICATIONS......................................................................................4-1
5 PRECAUTIONS FOR ALLOWABLE WRIST LOAD
......................................5-1
6 ALLOWABLE LOAD ON U-AXIS
................................................................6-1
7 ROBOT CONSTRUCTION
..........................................................................7-1
8 MAINTENANCE
.........................................................................................8-1
9 RECOMMENDED SPARE PARTS
..............................................................9-1
10 PARTS
LIST............................................................................................10-1
CHAPTER 4 SK16 DUAL MRC INSTRUCTIONS
1
INTRODUCTION........................................................................................1-1
2 EQUIPMENT
DESCRIPTION......................................................................2-1
3 BASIC
OPERATION...................................................................................3-1
4 CONTROLLER
MAINTENANCE..................................................................4-1
5 TROUBLESHOOTING
................................................................................5-1
6
DIAGRAMS...............................................................................................6-1
CHAPTER 5 SK16 ELEMENTARY DIAGRAMS
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
CHAPTER 1
INTRODUCTION
March 31, 1998
MOTOMAN805 Liberty Lane
West Carrollton, OH 45449TEL: (937) 847-6200 FAX: (937)
847-627724-HOUR SERVICE HOTLINE: (937) 847-3200
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Introduction 1-1 MOTOMAN
INTRODUCTIONAbout this DocumentThis manual provides information,
including basic installation and maintenanceinformation for the
SK16 and operation and maintenance instructions for theSK16 Dual
MRC Controller. It is your responsibility to familiarize
yourselfthoroughly with the information presented in this manual.
Before you proceed, besure you have read and understand CHAPTER 2,
SAFETY.
This manual is divided into the following chapters:
CHAPTER 1 - INTRODUCTIONChapter 1 provides general information
regarding this manual, a list of referencedocuments, and customer
service information.
CHAPTER 2 - SAFETYChapter 2 provides specific safety information
designed to supplement trainingreceived in an approved Motoman
training course.
CHAPTER 3 - SK16 MANIPULATOR INSTRUCTIONSChapter 3 provides
basic handling, installation, and wiring information forthe SK16.
In addition, preventive checks, maintenance, and specifications
arealso provided.
CHAPTER 4 - SK16 DUAL MRC INSTRUCTIONSThe Dual MRC processes
input and output signals, controls manipulatormovement, operates
welding power supply, and provides the signals to operatethe
welding system. It maintains variable data and performs the
numericprocessing to convert to and from different coordinate
systems. The controlleralso provides main logic functions, servo
control, program and constant datamemory, and power distribution.
In addition to the above, Chapter 4 alsoprovides basic information
for troubleshooting the SK16 Dual MRC Controller.
CHAPTER 5 - ELEMENTARY DIAGRAMSChapter 5 provides reference
information and block wiring diagrams of thevarious components of
the Dual MRC controller and SK16 manipulator.
Reference to Other DocumentationFor additional information refer
to the following:
• Motoman User Function Manual (Part Number 132331-1)
• Vendor manuals for system components not manufactured by
Motoman
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INTRODUCTION
SK16 Manipulator Introduction 1-2 MOTOMAN
Customer Service InformationIf you are in need of technical
assistance, contact the Motoman service staff at(937) 847-3200.
Please have the following information ready before you call:
• Robot Type (SK16)
• Application Type (Welding, Handling, etc.)
• Robot Serial Number (located on the back side of the robot
arm)
• Robot Sales Order Number (located on back side of MRC
controller)
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
CHAPTER 2
SAFETY
March 31, 1998
MOTOMAN805 Liberty Lane
West Carrollton, OH 45449TEL: (937) 847-6200 FAX: (937)
847-627724-HOUR SERVICE HOTLINE: (937) 847-3200
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety i MOTOMAN
TABLE OF CONTENTS Section Page
1
INTRODUCTION.......................................................................................................1-1
2 STANDARD CONVENTIONS
....................................................................................2-1
3 GENERAL SAFEGUARDING
TIPS.............................................................................3-1
4 MECHANICAL SAFETY
DEVICES..............................................................................4-1
5 INSTALLATION SAFETY
..........................................................................................5-1
6 PROGRAMMING SAFETY
........................................................................................6-1
7 OPERATION SAFETY
...............................................................................................7-1
8 MAINTENANCE SAFETY
..........................................................................................8-1
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 1-1 MOTOMAN
SECTION 1
INTRODUCTION
It is the purchaser's responsibility to ensure that all local,
county,state, and national codes, regulations, rules, or laws
relating tosafety and safe operating conditions for each
installation are metand followed.
We suggest that you obtain and review a copy of the ANSI/RIA
National SafetyStandard for Industrial Robots and Robot Systems.
This information can beobtained from the Robotic Industries
Association by requesting ANSI/RIAR15.06. The address is as
follows:
Robotic Industries Association900 Victors WayP.O. Box 3724
Ann Arbor, Michigan 48106TEL: 313/994-6088FAX: 313/994-3338
Ultimately, the best safeguard is trained personnel. The user is
responsible forproviding personnel who are adequately trained to
operate, program, and maintainthe robot cell. The robot must not be
operated by personnel who have notbeen trained!
We recommend that all personnel who intend to operate, program,
repair, or usethe robot system be trained in an approved Motoman
training course and becomefamiliar with the proper operation of the
system.
This chapter addresses the following:
• Introduction (Section 1)
• Standard Conventions (Section 2)
• General Safeguarding Tips (Section 3)
• Mechanical Safety Devices (Section 4)
• Installation Safety (Section 5)
• Programming Safety (Section 6)
• Operation Safety (Section 7)
• Maintenance Safety (Section 8)
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 2-1 MOTOMAN
SECTION 2
STANDARD CONVENTIONSThis manual includes information essential
to the safety of personnel andequipment. As you read through this
manual, be alert to the four signal words:
• DANGER
• WARNING
• CAUTION
• NOTE
Pay particular attention to the information provided under these
headings whichare defined below (in descending order of
severity).
DANGER!Information appearing under the DANGER caption concerns
theprotection of personnel from the immediate and imminent
hazardsthat, if not avoided, will result in immediate, serious
personal injuryor loss of life in addition to equipment damage.
WARNING!Information appearing under the WARNING caption concerns
theprotection of personnel and equipment from potential hazards
thatcan result in personal injury or loss of life in addition to
equipmentdamage.
CAUTION!Information appearing under the CAUTION caption concerns
theprotection of personnel and equipment, software, and data
fromhazards that can result in minor personal injury or
equipmentdamage.
NOTE: Information appearing in a NOTE caption provides
additional information which is helpful inunderstanding the item
being explained.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 3-1 MOTOMAN
SECTION 3
GENERAL SAFEGUARDING TIPSAll operators, programmers, plant and
tooling engineers, maintenance personnel,supervisors, and anyone
working near the robot must become familiar with theoperation of
this equipment. All personnel involved with the operation of
theequipment must understand potential dangers of operation.
General safeguardingtips are as follows:
• Improper operation can result in personal injury and/or damage
to theequipment. Only trained personnel familiar with the operation
of this robot,the operator's manuals, the system equipment, and
options and accessoriesshould be permitted to operate this robot
system.
• Do not enter the robot cell while it is in automatic
operation. Programmersmust have the teach pendant when they enter
the robot cell.
• Improper connections can damage the robot. All connections
must be madewithin the standard voltage and current ratings of the
robot I/O (Inputs andOutputs).
• The robot must be placed in Emergency Stop (E-Stop) mode
whenever it isnot in use.
• In accordance with ANSI/RIA R15.06, Section 6.13.4 and 6.13.5,
uselockout/tagout procedures during equipment maintenance. Refer
also toSection 1910.147 (29CFR, Part 1910), Occupational Safety and
HealthStandards for General Industry (OSHA).
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 4-1 MOTOMAN
SECTION 4
MECHANICAL SAFETY DEVICESThe safe operation of the robot,
positioner, auxiliary equipment, and system isultimately the user's
responsibility. The conditions under which the equipmentwill be
operated safely should be reviewed by the user. The user must be
awareof the various national codes, ANSI/RIA R15.06 safety
standards, and other localcodes that may pertain to the
installation and use of industrial equipment.Additional safety
measures for personnel and equipment may be requireddepending on
system installation, operation, and/or location. The
followingsafety measures are available:
• Safety fences and barriers
• Light curtains
• Door interlocks
• Safety mats
• Floor markings
• Warning lights
Check all safety equipment frequently for proper operation.
Repair or replace anynon-functioning safety equipment
immediately.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 5-1 MOTOMAN
SECTION 5
INSTALLATION SAFETYSafe installation is essential for protection
of people and equipment. Thefollowing suggestions are intended to
supplement, but not replace, existingfederal, local, and state laws
and regulations. Additional safety measures forpersonnel and
equipment may be required depending on system
installation,operation, and/or location. Installation tips are as
follows:
• Be sure that only qualified personnel familiar with national
codes, localcodes, and ANSI/RIA R15.06 safety standards are
permitted to install theequipment.
• Identify the work envelope of each robot with floor markings,
signs, andbarriers.
• Position all controllers outside the robot work envelope.
• Whenever possible, install safety fences to protect against
unauthorizedentry into the work envelope.
• Eliminate areas where personnel might get trapped between a
moving robotand other equipment (pinch points).
• Provide sufficient room inside the workcell to permit safe
teaching andmaintenance procedures.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 6-1 MOTOMAN
SECTION 6
PROGRAMMING SAFETYAll operators, programmers, plant and tooling
engineers, maintenance personnel,supervisors, and anyone working
near the robot must become familiar with theoperation of this
equipment. All personnel involved with the operation of
theequipment must understand potential dangers of operation.
Programming tips areas follows:
• Any modifications to PART 1 of the controller PLC can cause
severepersonal injury or death, as well as damage to the robot! Do
not make anymodifications to PART 1. Making any changes without the
writtenpermission of Motoman will VOID YOUR WARRANTY!
• Some operations require standard passwords and some require
specialpasswords. Special passwords are for Motoman use only. Y O U
RWARRANTY WILL BE VOID if you use these special passwords.
• Back up all programs and jobs onto a floppy disk whenever
programchanges are made. To avoid loss of information, programs, or
jobs, abackup must always be made before any service procedures are
done andbefore any changes are made to options, accessories, or
equipment.
• The concurrent I/O (Input and Output) function allows the
customer tomodify the internal ladder inputs and outputs for
maximum robotperformance. Great care must be taken when making
these modifications.Double-check all modifications under every mode
of robot operation toensure that you have not created hazards or
dangerous situations that maydamage the robot or other parts of the
system.
• Improper operation can result in personal injury and/or damage
to theequipment. Only trained personnel familiar with the
operation, manuals,electrical design, and equipment
interconnections of this robot should bepermitted to operate the
system.
• Inspect the robot and work envelope to be sure no potentially
hazardousconditions exist. Be sure the area is clean and free of
water, oil, debris, etc.
• Be sure that all safeguards are in place.
• Check the E-STOP button on the teach pendant for proper
operation beforeprogramming.
• Carry the teach pendant with you when you enter the
workcell.
• Be sure that only the person holding the teach pendant enters
the workcell.
• Test any new or modified program at low speed for at least one
full cycle.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 7-1 MOTOMAN
SECTION 7
OPERATION SAFETYAll operators, programmers, plant and tooling
engineers, maintenance personnel,supervisors, and anyone working
near the robot must become familiar with theoperation of this
equipment. All personnel involved with the operation of
theequipment must understand potential dangers of operation.
Operation tips are asfollows:
• Be sure that only trained personnel familiar with the
operation of this robot,the operator's manuals, the system
equipment, and options and accessoriesare permitted to operate this
robot system.
• Check all safety equipment for proper operation. Repair or
replace any non-functioning safety equipment immediately.
• Inspect the robot and work envelope to ensure no potentially
hazardousconditions exist. Be sure the area is clean and free of
water, oil, debris, etc.
• Ensure that all safeguards are in place.
• Improper operation can result in personal injury and/or damage
to theequipment. Only trained personnel familiar with the
operation, manuals,electrical design, and equipment
interconnections of this robot should bepermitted to operate the
system.
• Do not enter the robot cell while it is in automatic
operation. Programmersmust have the teach pendant when they enter
the cell.
• The robot must be placed in Emergency Stop (E-Stop) mode
whenever it isnot in use.
• This equipment has multiple sources of electrical supply.
Electricalinterconnections are made between the controller,
external servo box, andother equipment. Disconnect and
lockout/tagout all electrical circuits beforemaking any
modifications or connections.
• All modifications made to the controller will change the way
the robotoperates and can cause severe personal injury or death, as
well as damagethe robot. This includes controller parameters,
ladder parts 1 and 2, and I/O(Input and Output) modifications.
Check and test all changes at slow speed.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Safety 8-1 MOTOMAN
SECTION 8
MAINTENANCE SAFETYAll operators, programmers, plant and tooling
engineers, maintenance personnel,supervisors, and anyone working
near the robot must become familiar with theoperation of this
equipment. All personnel involved with the operation of
theequipment must understand potential dangers of operation.
Maintenance tips areas follows:
• Do not perform any maintenance procedures before reading
andunderstanding the proper procedures in the appropriate
manual.
• Check all safety equipment for proper operation. Repair or
replace any non-functioning safety equipment immediately.
• Improper operation can result in personal injury and/or damage
to theequipment. Only trained personnel familiar with the
operation, manuals,electrical design, and equipment
interconnections of this robot should bepermitted to operate the
system.
• Back up all your programs and jobs onto a floppy disk whenever
programchanges are made. A backup must always be made before any
servicing orchanges are made to options, accessories, or equipment
to avoid loss ofinformation, programs, or jobs.
• Do not enter the robot cell while it is in automatic
operation. Programmersmust have the teach pendant when they enter
the cell.
• The robot must be placed in Emergency Stop (E-Stop) mode
whenever it isnot in use.
• Be sure all safeguards are in place.
• Use proper replacement parts.
• This equipment has multiple sources of electrical supply.
Electricalinterconnections are made between the controller,
external servo box, andother equipment. Disconnect and
lockout/tagout all electrical circuits beforemaking any
modifications or connections.
• All modifications made to the controller will change the way
the robotoperates and can cause severe personal injury or death, as
well as damagethe robot. This includes controller parameters,
ladder parts 1 and 2, and I/O(Input and Output) modifications.
Check and test all changes at slow speed.
• Improper connections can damage the robot. All connections
must be madewithin the standard voltage and current ratings of the
robot I/O (Inputs andOutputs).
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
CHAPTER 3
SK16 MANIPULATORINSTRUCTIONS
March 31, 1998
MOTOMAN805 Liberty Lane
West Carrollton, OH 45449TEL: (937) 847-6200 FAX: (937)
847-627724-HOUR SERVICE HOTLINE: (937) 847-3200
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
GENERAL PRECAUTIONSThis instruction manual is intended to give
operating instructions and maintenanceprocedures for the Motoman
SK16. Some drawings in this manual are shownwith the protective
cover or shields removed, in order to describe their detail
withmore clarity. Make sure all covers and shields are replaced
before operating thisrobot.
Motoman is not responsible for any modification of the product
made by the usersince that will void our guarantee.
The information contained within this document is the
proprietary property ofMotoman, Inc., and may not be copied,
reproduced or transmitted to other partieswithout the express
written authorization of Motoman, Inc.
Because we are constantly improving our products, we reserve the
right to changespecifications without notice. MOTOMAN is a
registered trademark ofYASKAWA Electric Manufacturing.
© 1998 by MOTOMAN
All Rights Reserved
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions i MOTOMAN
TABLE OF CONTENTS Section Page
LIST OF FIGURES
.............................................................................................................
i i
LIST OF TABLES
..............................................................................................................
i i i
1
RECEIVING..............................................................................................................
1-1
2 INSTALLATION
.......................................................................................................
2-1
2.1 Selecting a Location
.....................................................................................
2-1
2.2 Positioning the
SK16....................................................................................2-1
2.3 Mounting the SK16 on the Floor
..................................................................2-3
2.4 Mounting SK16 on the Wall or Ceiling
..........................................................2-4
2.5 Safety Guards
.............................................................................................2-5
3
WIRING...................................................................................................................
3-1
3.1 Connecting the Earth Grounds
....................................................................3-1
3.2 Cable Connection
........................................................................................3-2
3.3 Conducting a Safety/Operation
Check...........................................................3-4
4 SPECIFICATIONS
...................................................................................................
4-1
4.1 Basic
Specification.......................................................................................
4-1
4.2 Nomenclature and Working Axes
.................................................................4-2
4.3 Dimensions and Working Ranges
..................................................................4-2
4.4 Working Range of B-axis
.............................................................................4-3
4.5 Alterable Working Range
.............................................................................4-3
5 PRECAUTIONS FOR ALLOWABLE WRIST LOAD
....................................................5-1
5.1 Allowable Wrist Load
...................................................................................
5-1
5.2 Wrist
Flange................................................................................................5-2
6 ALLOWABLE LOAD ON U-AXIS
..............................................................................
6-1
6.1 Mounting Equipment
....................................................................................6-1
6.2 Incorporated Wire and Airduct
.....................................................................6-2
7 ROBOT CONSTRUCTION
.......................................................................................
7-1
7.1 Position of Limit Switches
............................................................................7-1
7.2 Internal
Connections...................................................................................
7-1
8 MAINTENANCE
......................................................................................................
8-1
8.1 Preventive Maintenance
..............................................................................
8-1
8.2 Maintenance Procedures
.............................................................................8-4
8.2.1 Replacing the Battery
......................................................................8-48.2.2
S-axis Speed Reducer Lubrication Procedure
.....................................8-48.2.3 L- and U-axes Speed
Reducers Lubrication Procedures.....................8-58.2.4 R-axis
Speed Reducer Lubrication
Procedure.....................................8-6
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions ii MOTOMAN
Section Page8.2.5 B- and T-axes Speed Reducers Lubrication
Procedure .......................8-68.2.6 T-axis Gear Lubrication
Procedure
...................................................8-88.2.7 L-axis
Cross Roller Bearing Lubrication Procedure
...........................8-88.2.8 R-axis Cross Roller Bearing, L-
and U-axes Link, and
Link Taper Roller Bearing Lubrication
Procedures........................8-99 RECOMMENDED SPARE PARTS
............................................................................9-1
10 PARTS LIST
...........................................................................................................
10-1
10.1 S-axis Driving Unit
....................................................................................10-2
10.2 L- and U-axes Driving Unit
........................................................................10-4
10.3 R-axis Driving Unit
....................................................................................10-6
10.4 Wrist Unit
.................................................................................................
10-8
LIST OF FIGURES Figures Page
Figure 1-1 Manipulator/Robot Order
Number..............................................................
1-1Figure 2-1 Lifting the
SK16.........................................................................................2-2Figure
2-2 Mounting SK16 Directly To The Floor
........................................................2-3Figure
2-3 Manipulator Baseplate Mounting
...............................................................2-4Figure
2-4 Wall- and Ceiling-Mounted Variations
.........................................................2-4Figure
3-1 Grounding the
SK16...................................................................................3-2Figure
3-2 SK16 Power Cables
...................................................................................3-3Figure
3-3 Cable Connection Details
...........................................................................3-3Figure
4-1 SK16 Nomenclature and Working Axes
......................................................4-2Figure 4-2
SK16 Dimensions and Working Ranges
.......................................................4-2Figure
4-3 SK16 Working Range of B-axis
..................................................................4-3Figure
5-1 SK16 Moment Arm Rating
.........................................................................
5-1Figure 5-2 SK16 Wrist
Flange.....................................................................................5-2Figure
6-1 Allowable Load on U-axis
...........................................................................
6-1Figure 6-2 Internal Wires, Connectors, and Air Inlet Locations
...................................6-2Figure 6-3 Connector Pin
Detail
.................................................................................6-2Figure
7-1 Limit Switch Locations
................................................................................7-1Figure
7-2 Connector Numbers and Locations
.............................................................
7-1Figure 7-3 Internal Connect ion Diagram - 1 of 4
........................................................7-2Figure
7-3 Internal Connection Diagram - 2 of 4
........................................................7-3Figure
7-3 Internal Connection Diagram - 3 of 4
........................................................7-4Figure
7-3 Internal Connection Diagram - 4 of 4
........................................................7-5
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions iii MOTOMAN
Figures PageFigure 8-1 Inspection
Points.......................................................................................8-3
Figure 8-2 Battery Location
........................................................................................8-4
Figure 8-3 S-axis Speed Reducer Lubrication
...............................................................8-5
Figure 8-4 U-axis Lubrication
Position.........................................................................8-5
Figure 8-5 L- and U-axes Speed Reducers
Lubrication..................................................8-6
Figure 8-6 R-axis Speed Reducer Lubrication
...............................................................8-6
Figure 8-7 B- and T-axes Speed Reducer Lubrication
...................................................8-7
Figure 8-8 T-axis Gear
Lubrication..............................................................................8-8
Figure 8-9 L-axis Cross Roller
Bearing.......................................................................8-8
Figure 8-10 R-axis Cross Roller Bearing, L and U-axes Link,
andLink Taper Roller Bearing
Lubrication.................................................8-9
LIST OF TABLES Tables Page
Table 4-1 Basic Specifications for
SK16.....................................................................
4-1
Table 4-2 S-axis Working Range
................................................................................4-3
Table 5-1 Moment and Total Inertia
..........................................................................
5-1
Table 7-1 Connector Types
.......................................................................................7-6
Table 8-1 Preventive Maintenance Checks and Services
............................................8-2
Table 9-1 Spare Parts for SK16 Robot
......................................................................
9-1
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 1-1 MOTOMAN
SECTION 1
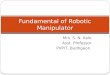
RECEIVING1. After unpacking, check the following:
• Manipulator
• MOTOMAN MRC Controller
• Programming Pendant
• Feeder Cable between MRC and SK16
CAUTION!Confirm that the manipulator and the MOTOMAN MRC
controllerhave the same order number. Special care must be taken
whenmore than one manipulator is to be installed.
2. Check that the order numbers of the manipulator and
controller agree. If thenumbers do not match, manipulators may not
perform as expected and causeinjury or damage.
THE MANIPULATOR AND THE CONTROLLERSHOULD HAVE SAME ORDER
NUMBER.
ORDER.NO.THE MANIPULATOR AND THE CONTROLLERTHE MANIPULATOR AND
THE CONTROLLERSHOULD HAVE SAME ORDER NUMBER.SHOULD HAVE SAME ORDER
NUMBER.
ORDER.NO.ORDER.NO.
OR
DE
R.N
O.
OR
DE
R.N
O.
Figure 1-1 Manipulator/Robot Order Number
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 2-1 MOTOMAN
SECTION 2
INSTALLATION2.1 Selecting a Location
CAUTION!Install the manipulator in a location where a fully
extended armwith tool will not reach a side wall or MRC
cabinet.
Installation location can have a profound effect on the
positioning accuracy and lifeof the robot. Locate the robot in an
area that meets the following criteria:
• Ambient temperature is between 0˚C to 45˚C (32˚F to 113˚F)
• No corrosive gases or liquids
• No explosive gases
• No large electrical noise (plasma)
• No excessive vibration
• Enough room to safely operate manipulator
• Level, undamaged floor surface (no cracks or other
defects)
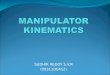
2.2 Positioning the SK16The SK16 can be placed in its final
position by either being lifted with a hoist andcable or sling or
with a forklift. To lift the SK16 with a cable or sling, proceed
asfollows:
1. Ensure all shipping brackets are securely in place, as shown
in Figure 2-1.
WARNING!• The MOTOMAN SK16 weighs approximately 280 kg (618
lbs),
including the shipping bolts and brackets. Use a cable orsling,
that can withstand this weight.
• Eyebolts are designed to support the robot weight. Use
thebolts for lifting the robot ONLY.
2. Ensure that eyebolts are attached securely to the robot.
3. Attach a suitable lifting device securely to the
eyebolts.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INSTALLATION
SK16 Manipulator Instructions 2-2 MOTOMAN
CAUTION!• Crane operations or sling applications must be
performed b y
authorized personnel only, or injury or damage may result.
• Be sure to use a spreader bar to keep dual chains from
pullingagainst the robot assembly and damaging it.
4. Carefully lift the robot, taking care to avoid excessive
vibration/shock orexerting force on the arm or motor unit, and
place in the desired location.
EYEBOLT (M12)
PALLET
4 BOLTS (M18)
EYEBOLT (M12)
3 BOLTS (M6)
SPREADER ATTACHEDTO LIFTING DEVICE
SHIPPING BRACKETS W/BOLTS (M6)
Figure 2-1 Lifting the SK16
To lift the SK16 with a forklift, proceed as follows:
1. Ensure all shipping brackets are securely in place, as shown
in Figure 2-1.
WARNING!The MOTOMAN SK16 weighs approximately 280 kg (618
lbs),including the shipping bolts and brackets. Use a suitable
palletand forklift that can withstand this weight.
2. Attach SK16 to a suitable pallet with shipping bolts (see
Figure 2-1).
CAUTION!Forklift operation must be performed by authorized
personnelonly, or injury or damage may result.
3. Carefully lift the robot, taking care to avoid excessive
vibration or shock orexerting force on the arm or motor unit, and
place in the desired location.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INSTALLATION
SK16 Manipulator Instructions 2-3 MOTOMAN
2.3 Mounting the SK16 on the FloorThe SK16 can be mounted to a
common base, that is secured to the floor, ordirectly to the floor
without a common base.
To mount the robot directly to the floor (see Figure 2-2):
WARNING!The MOTOMAN SK16 weighs approximately 280 kg (618
lbs).Inspect the floor for unevenness, cracks, and other
defects.Correct all defects before mounting the robot.
1. Secure the robot to the floor with four M16 (50 mm length)
anchor bolts,spring washers, and washers. Tighten anchor bolts
securely.
ANCHOR BOLTS (M16)
CONCRETE
150
mm
OR
MO
RE
ANCHOR BOLTS (M16)
Figure 2-2 Mounting SK16 Directly To The Floor
To mount the SK16 to a common base, proceed as follows (see
Figure 2-3):
1. Ensure the common base will be strong enough to support the
robot andwithstand repulsion forces during acceleration and
deceleration. The commonbase must be at least 40mm thick and rugged
enough to prevent the SK16from shifting.
2. Attach the SK16 to the common base with four M16 anchor
bolts, springswashers, and washers. Tighten anchor bolts
securely.
3. Attach the common base to the floor with M18 (60 mm length)
anchor bolts.Tighten anchor bolts securely.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INSTALLATION
SK16 Manipulator Instructions 2-4 MOTOMAN
MANIPULATOR BASE
ANCHOR BOLT (M16)
COMMON BASE
WASHER
MANIPULATOR BASE
COMMON BASE
4 BOLTS (M18)SPRINGWASHER
40mmor more
40mmor more
20mm
Figure 2-3 Manipulator Baseplate Mounting
2.4 Mounting SK16 on the Wall or CeilingThe standard method of
mounting the SK16 is on the floor. However wall-and ceiling-mounted
types are also available with the following differences (seeFigure
2-4):
NOTE: When using wall-mounted or ceiling-mounted types, contact
your MOTOMANrepresentative.
DANGER!The MOTOMAN SK16 weighs approximately 280 kg (618 lbs).
Theceiling or wall must be strong enough to support at least
thismuch weight. Also, for safe operation, always use safety
countermeasures to prevent the manipulator from falling.
NOTE: When the SK16 is mounted on the wall, the S-axis working
range is restricted to + 30˚C.
1. Ensure the mounting (wall or ceiling) can support the weight
of themanipulator.
4 HEX. SOCKET HEADCAP BOLTS (M18)
MANIPULATOR BASE
SUPPORT SUPPORT
Figure 2-4 Wall- and Ceiling-Mounted Variations
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INSTALLATION
SK16 Manipulator Instructions 2-5 MOTOMAN
2. Using adequate supports, attach the SK16 to the wall or
ceiling with fourM18 hexagon socket head cap bolts that have a
tensile strength of 1200N/mm2 or more. Tighten bolts to 29 kgf.m
(210 ft lb).
2.5 Safety Guards
DANGER!Failure to install safety guards may result in injury or
damage.
To ensure maximum safety for your personnel, always install
safety guards aroundthe SK16. The following is quoted from American
National Standard ANSI/RIAR15.06-1986:
"The user of a robot or robot system shall ensure that
safeguards are providedand used in accordance with Sections 6, 7,
and 8 of this standard. The means anddegree of safeguarding,
including any redundancies, shall correspond directly tothe type
and level of hazard presented by the robot system consistent with
therobot application. Safeguarding may include, but not limited to,
safeguardingdevices, barriers, interlock barriers, perimeter
guarding, awareness barriers, andawareness signals."
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 3-1 MOTOMAN
SECTION 3
WIRING
DANGER!Bone Wiring should be performed only by a qualified
electrician.Electrical and grounding connections must comply
withapplicable portions of the national electrical code and/or
localelectrical codes.
WARNING!Bone Before beginning any wiring procedures, ensure the
primaryAC Power Disconnect Switch is in the OFF position and has
beenlocked out and tagged out as specified in ANSI/RIA R15.06
andOSHA, Section 1910.147.
3.1 Connecting the Earth GroundsThe robot and the MRC must each
be connected to an earth ground. An earthground is a ground in
which the equipment is connected to a ground stake driveninto the
earth. The ground stake must be driven a minimum of eight feet into
theearth, and the earth must be treated with chemicals in order to
reduce resistance tothe ground stake. Deeper ground stakes may be
required depending on area soilconditions. A maximum of 100 ohms
ground resistance is recommended.
WARNING!• If proper earth grounds cannot be provided, do not use
the
equipment! Serious injury or death can occur.
• You must use class 3 ground (ground resistance 100 Ω or
less).Failure to observe this warning may result in fire or
electricshock.
NOTE: If the robot and the MRC are within 15 feet of each other,
a common earth ground may beused. Otherwise, separate earth grounds
must be used.
To ground the robot and the MRC:
1. Use a class 3 ground (ground resistance 100Ω or less) with
5.5mm2 or largerground line.
NOTE: • Do not use this line in common with other ground lines
or grounding electrode for otherelectric power, motive power,
welding device, etc.
• Where the metal duct, metallic conduit, or distributing rack
is used for cable laying, groundin accordance with Electric
Equipment Technical Standards.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
WIRING
SK16 Manipulator Instructions 3-2 MOTOMAN
2. Connect one end of the first earth ground cable to the lug
marked EARTHGROUND on the bottom back of the robot (see Figure
3-1).
3. Connect the other end of the first earth ground cable to the
earth ground stake.
4. Connect one end of the second earth ground cable to the
common ground busbar inside the MRC.
5.5mm OR LARGERGROUND LINE
2
GROUNDINGBOLT
Figure 3-1 Grounding the SK16
5. Connect the other end of the second earth ground cable to the
earthground stake.
3.2 Cable ConnectionThere are two power supply cables that run
from the MRC to the SK16; one is asignal cable for detection (IBC)
and the other is a power cable (2BC) (see Figure 3-2). Refer to
Figure 3-3 for cable connection details. To connect the cables to
theSK16, proceed as follows (see Figure 3-2):
1. Carefully connect two power supply cables (labeled 1BC and
2BC), runningfrom the MRC, to the 1BC and 2BC connections on the
back of the SK16.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
WIRING
SK16 Manipulator Instructions 3-3 MOTOMAN
2BC CABLE1BC CABLE
Figure 3-2 SK16 Power Cables
MRC CONNECTIONS
ROBOT CONNECTIONS
BAT - 1
1SV-12CN
BA
T -
1
1SV
-12C
N
1SV-22CN
1SV
-22C
N
1SV-32CN
1SV
-32C
N
2SV-12CN
2SV
-32C
N
2SV-22CN
2SV
-22C
N
2SV-32CN
MTU-6
MT
U-6
CN
6-18
CN
6-20
2SV
32C
N
E
1BC
2BC
CONNECTOR
MAIN KEY POSITION
MAIN KEY POSITION
CONNECTOR
TERMINAL
KEYWAY
SIGNAL CABLE FOR DETECTION (1BC)
POWER CABLE (2BC)
CONNECTOR
MAIN KEY POSITION
CONNECTOR
CONNECTOR
CONNECTOR
Figure 3-3 Cable Connection Details
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
WIRING
SK16 Manipulator Instructions 3-4 MOTOMAN
3.3 Conducting a Safety/Operation CheckBefore installing the
tooling and fixtures for your application, take a few minutes
toperform a safety/operation check. To conduct a safety/operation
check, proceed asfollows:
1. Ensure that the robot and components have been firmly and
properlyanchored.
2. Ensure that all three yellow shipping brackets have been
removed fromthe robot.
3. Ensure that all safety guards, fencing, and mats are in
place.
4. Ensure that all cable connections are tight.
5. Verify that incoming line power matches the input power as
specified on thefront of the MRC.
CAUTION!The SK16 should only be operated by personnel who have
receivedoperator training from Motoman, Inc. and are familiar with
theoperation of the SK16.
Your SK16 is now be ready for power up. Turn the main power ON,
and continuethe safety/operation check.
6. Check all E-STOPS (pendant, op-station, shock sensor,
playback box).
7. Check system Hold buttons.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 4-1 MOTOMAN
SECTION 4
SPECIFICATIONS4.1 Basic Specification
Table 4-1 Basic Specifications for SK16
Description SpecificationOperation Mode Vertically
Articulated
Degree of Freedom 6
Payload 16 kg (35.3 lbs)
Repetitive Positioning Accuracy + 0.1 mm (0.0039 in.)
Motion RangeS-axis (Turning)L-axis (Lower Arm)U-axis (Upper
Arm)R-axis (Rotation)B-axis (Bend)T-axis (Turning)
+ 170°+150° , -90°+150° , -125°
+ 180° + 135° + 350°
Maximum SpeedS-axisL-axisU-axisR-axisB-axisT-axis
2.44 rad/s, 140°/s2.44 rad/s, 140°/s2.44 rad/s, 140°/s5.24
rad/s, 300°/s5.24 rad/s, 300°/s6.98 rad/s, 400°/s
Allowable MomentR-axisB-axisT-axis
31.4 N•m (3.2 kgf•m)31.4 N•m (3.2 kgf•m)15.7 N•m (1.6 kgf•m)
Allowable InertiaR-axisB-axisT-axis
0.7 kg•m2
0.7 kg•m2
0.2 kg•m2
Weight 280 kg (618 lbs)
Temperature 0 to 45°CNoise Level Below 80 dB
Power Capacity 6 kVA
Ambient ConditionsHumidityVibrationOthers
20 to 80% RH (non-condensing)Less than 0.5 G
• Free from corrosive or explosive gases and liquids• Clean and
dry• Free from excessive electrical noise (plasma)
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SPECIFICATIONS
SK16 Manipulator Instructions 4-2 MOTOMAN
4.2 Nomenclature and Working Axes
S-
S+
L- L+
U- R- T-
U+ R+ T+
BASE
ROTARY (S)HEAD
WRIST FLANGE
LOWER (L) ARM
B-
B+
UPPER (U) ARM WRIST
Figure 4-1 SK16 Nomenclature and Working Axes
4.3 Dimensions and Working Ranges510˚
POINT P
POINT PWORKING RANGE
170˚
170˚
R275
R581R1555
R413
(58)
1555
2679
344 581
2653
1940
956
232
28401124
1375
585
152
770200
182
643870
0
713631
60
˚
35
˚
25
˚
90̊
105
BASEPLATE
130 + 0.1
170
+ 0.
1
12
250
3356
0
60330
335 375
4-20 DIAMETER
200 + 0.1
200
+ 0.
1
0.0180
+ DIAMETER
375
0
1185 70
˚
1300
Figure 4-2 SK16 Dimensions and Working Ranges
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SPECIFICATIONS
SK16 Manipulator Instructions 4-3 MOTOMAN
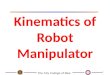
4.4 Working Range of B-axisThe working range of B-axis
maintaining a constant angle to the center of U-axis isshown in
Figure 4-3.
L-AXIS ROTATION CENTER
U-AXIS ROTATION CENTER
B-AXIS ROTATION CENTER
S-AXIS ROTATION CENTER
135˚
135˚
Figure 4-3 SK16 Working Range of B-axis
4.5 Alterable Working RangeThe working range of S-axis can be
altered according to the operating conditions, asshown in Table
4-2. If alteration is necessary, contact your MOTOMANrepresentative
in advance.
Table 4-2 S-axis Working Range
Item SpecificationsS-axisWorkingRange
+ 170˚ (Standard) + 150˚ + 120˚ + 90˚ + 60˚ + 30˚
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 5-1 MOTOMAN
SECTION 5
PRECAUTIONS FORALLOWABLE WRIST LOAD
5.1 Allowable Wrist Load1. The allowable wrist load for the SK16
is 16 kg (35.3 lbs). The following
conditions should be observed.
2. If force is applied to the wrist instead of the load, force
on R-, B-, and T-axesshould be within the value shown in Table 5-1.
Contact your MOTOMANrepresentative for further information or
assistance.
Table 5-1 Moment and Total Inertia
Axis Moment N-m Total Inertia (GD2/4)kg•m2
R-axis 31.4 0.7
B-axis 31.4 0.7
T-axis 15.7 0.2
3. Where the volume of load is small, refer to moment arm rating
(seeFigure 5-1).
LOAD GRAVITYPOSITION
B-AXIS ROTATION CENTER LINE
T-AXIS & R-AXISROTATION CENTER LINE
LB
L T
105mm
200
300
100
0 100 200 300 400
LB (mm)
LT (mm)W=10kg
W=6kg
W=16kg
Figure 5-1 SK16 Moment Arm Rating
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PRECAUTIONS FOR ALLOWABLE WRIST LOAD
SK16 Manipulator Instructions 5-2 MOTOMAN
5.2 Wrist FlangeWrist flange dimensions are shown in Figure 5-2.
In order to see the tram marks,it is recommended that the
attachment be mounted inside the fitting. Fitting depthof inside
and outside fittings must be 5mm (0.2 in.) or less.
45˚ 4 TAPPED HOLES (M6),10mm DEEP
P.C. D40
6 DIAMETER,6mm DEEP
25 DIAMETER0.0210+
6mm
50
D
IAM
ET
ER
0 0.03
9-
0.0120
+
6mm
Figure 5-2 SK16 Wrist Flange
NOTE: Wash out anti-corrosive paint on wrist flange surface with
thinner or light oil before mountingthe tools.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 6-1 MOTOMAN
SECTION 6
ALLOWABLE LOADON U-AXIS
6.1 Mounting EquipmentWhen peripheral equipment is attached to
the U-axis, the following conditionsshould be observed. Never
modify the robot for other mountings.
CAUTION!The maximum allowable load on the U-axis, including the
wristload, is 31 kg (68.3 lbs).
30
20
200 100 100 200 300 400 500 (mm)
10
00
WEIGHT(W2)
(kg)
W1=16*
W1=10
W1=6
DISTANCE BETWEEN U-AXIS ROTATIONCENTER AND LOAD GRAVITY
* WHEN LOAD CAPACITY (W1) EQUALS 16kg UN-BALANCED MOMENT IS NOT
PERMITTED
4-M8P1.0, 10mm DEEP
VIEW A
80
58
190
W1
U-AXIS ROTATIONCENTER
DIMENSIONS ARE IN MILLIMETERS (mm)
W2
A
25ϒ50
W1 = LOAD GRAVITY (kg)
Figure 6-1 Allowable Load on U-axis
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ALLOWABLE LOAD ON U-AXIS
SK16 Manipulator Instructions 6-2 MOTOMAN
6.2 Incorporated Wire and AirductWires and an air line are
incorporated into the robot for user application. Followingare
ratings for sixteen wires and air ducts:
• Allowable current for wires: 6.6 A or below/wire. Total
current value forpins 1 to 16 must be 40 A or less.
• Maximum pressure for air duct: 490 kPa (71.1 psi) or less.
A Air inlet: PT 3/8 tap, with bull plugB S-axis Cable Connector:
Type JL05-2A20-29PC (with cap) Mating plug:
Type JL05-6A20-29S
C Air inlet: PT 3/8 tap, with bull plugD U-axis Cable Connector:
Type JL05-2A20-29SC (with cap) Mating plug:
Type JL05-6A20-29P
A BC
DC
Figure 6-2 Internal Wires, Connectors, and Air Inlet
Locations
PINS USED
INTERNAL WIRES: 0.3 mm2 , 12 WIRES 1.25 mm2, 4 WIRES
12 3
4 5 67 8
9 1011 12
13 14 15 16
12345678910111213 (1.25 mm )14 (1.25 mm )15 (1.25 mm )16 (1.25
mm )
2
2
2
2
Figure 6-3 Connector Pin Detail
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 7-1 MOTOMAN
SECTION 7
ROBOT CONSTRUCTION7.1 Position of Limit Switches
The limit switches are located as shown in Figure 7-1. The
inspection andadjustment of the limit switches should be made after
removing the cover.
S-AXIS OVERRUNLIMIT SWITCH
LU-AXIS INTEREFERENCELIMIT SWITCH(OPTIONAL)
L-AXIS OVERRUNLIMIT SWITCH(OPTIONAL)
Figure 7-1 Limit Switch Locations
7.2 Internal ConnectionsHigh reliability connectors, which can
be easily removed, are used with eachconnector part. For the
numbers and locations of connectors, refer to Figure 7-2.
Nos. 18 TO 25
Nos. 7 TO 17
Nos. 2, 5
Nos. 1, 3, 4, 6
No. 26
INTERNAL WIRE CONNECTOR
1BC 2BC 3BC (FOR INTERNAL WIRE)
Figure 7-2 Connector Numbers and Locations
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ROBOT CONSTRUCTION
SK16 Manipulator Instructions 7-2 MOTOMAN
YASNAC-MRCPOWER CABLE
1-178288-3
MR-20L
MR-20L
MR-20L
MR-20L
MR-20L
MR-20L
1BC (36-74)
1BC-1 PA1-2 *PA1-5 PB1-6 *PB1
PB-2
-12 PC1-13 *PC1 -3 BAT -4 OBT
-10 +5 -1 -19 +5 -1 -11 OV-1 -20 OV-1 -7 FG-1
-8 PA-2 -9 -16
PB-2 -17PB-2 -18PC-2 -25
+5 -2 -26
+5 - 3 -36
-14 -15 -22 -23 -31 -32
+5 - 3 -45OV - 3 -37OV - 3 -46FG 3 -47
+5 - 4 -40+5 - 3 -48OV - 4 -41OV - 4 -49FG 4 -24
PA 3 -21*PA 3 -28PB 3 -29
*PB 3 -30PC 3 -38
*PC 2
PA 4*PA 4PB 4
*PB 4PC 4
*PC 4
-39
+5 -2 -34OV -2 -27OV -2 -35FG 2 -33
*PA-2
BAT-1-2
1 SV- 12CN
1 SV- 22CN
1 SV- 32CN
2 SV- 12CN
2 SV- 22CN
2 SV- 32CN
-1
OBT BATBATTERY
-16-17-18-19
-15-14
-4-5-1-2-20
-16-17-18-19
-15-14
-4-5-1-2-20
-16-17-18-19
-15-14
-4-5-1-2-20
-16-17-18-19
-15-14
-4-5-1-2-20
-16-17-18-19
-15-14
-4-5-1-2-20
-16-17-18-19
-15-14
-4-5-1-2-20
P
P
P
P
P
P
P
P
P
P
P
-42 -51 -59 -60 -61 -67
PA 5*PA 5PB 5
*PB 5PC 5
*PC 5
P
P
P
-54 -55 -62 -63 -64 -70
PA 6*PA 6PB 6
*PB 6PC 6
*PC 6
P
P
P
P
P
P
P
P
P
PP
PP
PP
PP
PP
PP
+5 - 5 -43+5 - 5 -52OV - 5 -44OV - 5 -53FG 5 -50
PP
PP
+5 - 6 -68+5 - 6 -72OV - 6 -69OV - 6 -73FG 6 -71
PP
PP
PP
PP
Figure 7-3 Internal Connection Diagram - 1 of 4
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ROBOT CONSTRUCTION
SK16 Manipulator Instructions 7-3 MOTOMAN
NO 1
1CN-1 PA1-2 *PA1-3 PB1-4 *PB1
-6 PC1-5 PC1
-7 BAT-8 OBT-9 +5V-10 OV
-11 FG-1-12 RST
P
P
P
P
P
P
P
PG S- AXIS
SHIELD
NO 2
2CN-1 PA2-2 *PA2-3 PB2-4 *PB2
-6 PC2-5 PC2
-7 BAT-8 OBT-9 +5V-10 OV
-11 FG-2-12 RST
P
P
P
P
P
PG L- AXIS
SHIELD
NO 3
3CN-1 PA3-2 *PA3-3 PB3-4 *PB3
-6 PC3-5 PC3
-7 BAT-8 OBT-9 +5V-10 OV
-11 FG-3-12 RST
P
P
P
P
P
PG U- AXIS
SHIELD
NO 7
NO 9
NO 8
7CN-1
8CN-1
PA4-2 *PA4-3 PB4-4 *PB4
-6 PC4-5 PC4
-2BAT
-3OBT
-4+5V
-5OVFG-4
-6 RST
P
P
P
P
P
PG S- AXIS
SHIELD
P
P
P
P
P
P
P
P
P
P
P
P
NO 10
9CN-1
10CN-1
PA5-2 *PA5-3 PB5-4 *PB5
-6 *PC5-5 PC5
-2BAT
-3OBT
-4+5V
-5OVFG-5
PG
B- AXIS
T- AXIS
SHIELD
SHIELD
NO 19
NO 18
18CN-1
19CN-1
PA5-2 *PA5-3 PB5-4 *PB5
*PC5-6-5 PC5
-2BAT
-3OBT
-4+5V
-5OVFG-5
-6 RST
NO11
P
P
P
P
NO 12
11CN-1
12CN-1
PA6-2 *PA6-3 PB6-4 *PB6
-6 *PC6-5 PC6
-2
21
21
-3
+5V
PG
SHIELD SHIELD
NO 21
NO 20
20CN-1
21CN-1
PA5-2 *PA5-3 PB5-4 *PB5
-6 *PC5-5 PC5
-2BAT
-3OBT
-4+5V
-5OV
OV
FG-6FG-6
-6 RST
Figure 7-3 Internal Connection Diagram - 2 of 4
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ROBOT CONSTRUCTION
SK16 Manipulator Instructions 7-4 MOTOMAN
MR-20LW
LB1-56
-58
-65
-66
-57+24 V
BC2
SS2OV
MTU-6-15
CN21 (28-21)
CN21-33-36
-8-20-2-11-9-18-14
-1-2-5-6
-11-10
-3-4-7-8-12
P
P
E E
E
E
E E
E
BASE2BC (28-21)
3BC (20-29)
2BC-33 AC1-36 AC2
-1 MU1-2 MV1-5 MW1-6 ME1-10 BA1
-3 MU2-4 MV2-7 MW2-8 ME2-12
-9-14-15-19-20
BA2
-9-14-15-19-20
MU3 MV3MW3ME3BA3
-16-17-18-23-24
-22-26-27-28-32
MU4 MV4MW4ME4BA4
-25
-16-17-18-23-24
MU5 MV5MW5ME5BA5
-22-26-27-28-32
-30-31-34-35-13
MV6MW6
-30-31-34-35-13
-21
BA6
-21
-29 MU6-29
-25 BB4
-11 BB1
-1-2-3-4-5-6-7-8-9-10-11-12-13-14-15-16
-1 -1 -1-2 -2-3-4-5-6
-3-4-5-6
-2-3-4-5-6
-7-8-9-10-11-12-13-14-15-16
No. 26
26 CN-1
-2 SS1
B1
SS1
B1
SS2
B2
-3 BC1 U
-4 LA1
-5 LB1-6 BC2
Figure 7-3 Internal Connection Diagram - 3 of 4
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ROBOT CONSTRUCTION
SK16 Manipulator Instructions 7-5 MOTOMAN
P
P
P
P
P
P
P
P
P
P
4CN-1
AL-1
S-AXIS OVERRUN L.S.
AC-1AC-2
AL-2
MU1
SM S-AXIS
L-AXIS
YB
-2 MV1-3 MW1-4 ME1-5 BA1-6 BB1
5 CN-1 MU2
SM
YB
-2 MV2-3 MW2-4 ME2-5 BA2-6 BB2
No.5
No.6
No.4
U-AXIS
6CN-1 MU3
SM
YB
-2 MV3-3 MW3-4 ME3-5 BA3-6 BB3
No.13
No.14
13CN-1 MU4
SM
YB
-2
14CN-1-2
MV4-3 MW4-4 ME4
BA4BB4
No.15
No.16
R-AXIS
B-AXIS
15CN-1 MU5
SM
YB
-2
16CN-1-2
MV5-3 MW5-4 ME5
BA5BB5
No.22
No.23
22CN-1 MU5-2
23CN-1-2
MV5-3 MW5-4 ME5
BA5BB5
No.17
T-AXIS
17CN-1 MU6
SM
YB
-2 MV6
-3 MW6-4 BA6
No.24
24CN-1 MU6
No.25
25CN-1 BA6
-2 BB6
-2 MV6
-3 MW6-4 ME6
E E
CASING
-12BC
FOR SPARE
-2-3-4-5-6-7-8-9-10-11-12-13-14-15-16
12345678910111213141516
-1 -1-2-3-4
-2-3-4
LU-AXIS L.S. SPECIFICATIONS
L-AXIS OVERRUN L.S.
S-AXIS OVERRUN L.S.
LU-AXIS INTERFERENCE L.S.
For LAMP (OPTION)
For FAN (OPTION)
ALB1LB2
LB1LB2 LB2
LB1LA1
LA2
LB3LA3
A
3BC (20-29)
LB1LB2
LB2 LB2
LB3
LB1LA2
LA3
Figure 7-3 Internal Connection Diagram - 4 of 4
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
ROBOT CONSTRUCTION
SK16 Manipulator Instructions 7-6 MOTOMAN
Table 7-1 Connector Types
Name No. Receptacle Type Plug TypeBase 1BC JL05-2A36-74PC
JL05-6A36-74SC
Connector 2BC JL05-2A28-21PC JL05-6A28-21SC
For Internal Wires
3BC JL05-2A20-29PC JL05-6A20-29S(Optional)
9, 11 172168-1 172160-1
10 1-172168-2 1-172160-2
Intermediate 12, 15 172167-1 172159-1
Connector 16 172165-1 172233-1
17 172167-2 172159-2
4, 5 350715-1 350781-1
Motor 6 172168-1 172160-1
Connectors 13, 22, 24 172167-1 172159-1
14, 23, 25 172165-1 172233-1
Feedback 1,2,3 172170-1 172162-1
Unit 7, 18, 20 172168-1 172160-1
Connector 8, 19, 21 1-178168-2 1-172160-2
Connector
for Internal
Wires
JL05-2A20-29PC JL05-6A20-29SC(Opitonal)
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 8-1 MOTOMAN
SECTION 8
MAINTENANCE8.1 Preventive Maintenance
Proper preventive maintenance is essential to ensure the
equipment will providemany years of trouble-free performance. Table
8-1, Preventive MaintenanceChecks and Service lists when, what, and
how to inspect/service specificcomponents of the SK16. All Item
No.'s correspond to numbered components inFigure 8-1 except for
item 18, Overhaul, which refers to the overall robot.
When performing the procedures in Table 8-1, it is important to
keep the followingguidelines in mind:
WARNING!Only personnel who have been trained in the operation
andmaintenance of the SK16 should perform preventivemaintenance,
checks, and services or personal injury or damageto equipment could
result.
1. Only personnel who have been trained in the operation and
maintenance ofthe SK16 should perform the procedures listed in this
section.
2. Inspection intervals are based on servo power supply ON
time.
3. These inspections/services have been established for arc
welding applications.It will be necessary to re-examine them for
different, or special applications.
4. For axes that are used very frequently (in handling
applications, for example)it is recommended that inspection
intervals be cut-in-half from what islisted in Table 8-1.
5. When using a multimeter to check conductivity on wire harness
leads (items14 and 15), remove detector side connectors for each
axis from the motor.
CAUTION!For overhaul, disassembly, or repair contact MOTOMAN
ServiceDepartment at (937) 847-3200.
6. Wire harnesses (items 14 and 15) are to be replaced at
Overhaul (24000H).
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-2 MOTOMAN
Table 8-1 Preventive Maintenance Checks and Services
ItemNo.
Interval(Daily/Hours)
Item to beInspected Procedure
1 Daily Tram Mark Check for Tram Mark.
2 Daily External Leads Check leads for damage or
deterioration.
3 Daily Robot and WorkArea
• Check robot for cracks or damage.
• Clean work area of dust and/or spatter.
4 Daily L- and U-axesMounting Baseplate
Check for grease leakage.
5 • 1000H
• 6000H
• 12000H
Baseplate MountingBolts
Tighten loose bolts. Replace bolts if necessary.
6 • 1000H
• 6000H
• 12000H
Cover MountingScrews
Tighten loose bolts. Replace bolts if necessary.
7 • 1000H
• 6000H
• 12000H
Base Connectors Check for loose connectors. Tighten connectors,
if necessary.
8 • 6000H
• 12000H
S-axis SpeedReducer
• Check for malfunction. Replace if necessary.
• Grease at 6000H with Molywhite RE No. 00 (see Sec. 8.2.2).
• Replace grease at 12000H with Molywhite RE No. 00 (see Sec.
8.2.2).
9 • 6000H
• 12000H
L- and U-axes SpeedReducer
• Check for malfunction. Replace if necessary.
• Grease at 6000H with Molywhite RE No. 00 (see Section
8.2.3).
• Replace grease at 12000H with Molywhite RE No. 00 (see Sec.
8.2.3).
10 • 6000H R-, B-, and T-axesSpeed Reducers
• Check for malfunction. Replace if necessary.
• Grease every 6000H with Harmonic Grease SK (see Sections 8.2.4
and 8.2.5).
11 • 6000H T-axis Gear • Check for malfunction. Replace if
necessary.
• Grease every 6000H with Harmonic Grease SK-1 (see Sec.
8.2.6).
12 • 6000H L- and R-axes CrossRoller Bearings
• Check for malfunction. Replace if necessary.
• Grease every 6000H with Alvania EP (see Sections 8.2.7 and
8.2.8).
13 • 12000H R-, B-, and T-axesTiming Belt
Check for adequate tension and excessive belt wear.
14 • 12000H Wire Harness Leadsfor S-, L-, U-, R-, B-,and
T-axes
• Check S-, L-, U-, R-, B-, and T-axes leads for conductivity
between base main connector and intermediate connector.
• Check for excessive wear on protective spring and
insulation.
15 • 12000H Wire Harness Leadsfor B- and T-axes
• Check B-, and T-axes leads for conductivity between
terminals.
• Check for excessive wear on protective spring and
insulation.
16 • 12000H L- and U-axes Link • Check for bearing wear
(looseness) by moving L- and U-axes forward, backward, up, and
down.
• Grease every 12000H with Alvania EP Grease 2 (see Sec.
8.2.9).
17 • 12000H Battery • Check voltage. If less than 2.8V, replace
battery (see Sec. 8.2.1).
18 • 6000H
• 24000H
Overhaul Contact the Motoman Service Department at (937)
847-3200.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-3 MOTOMAN
T-AXIS
B-AXIS
T-AXIS
16
14
13
8
13
1
5
12
10
1
1 B-AXIS
13
10
11
2
17
72
44
14
12
14
9
14
1
1
L-AXIS
U-AXIS
16 16
1
U-AXIS 9
S-AXIS
14
Figure 8-1 Inspection Points
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-4 MOTOMAN
8.2 Maintenance Procedures
DANGER!In accordance with ANSI/RIA R15.06, Section 6.13.4 and
6.13.5,use lockout/tagout procedures during equipment
maintenance.Refer also to Section 1910.147 (29CFR, Part 1910),
OccupationalSafety and Health Standards for General Industry
(OSHA).
8.2.1 Replacing the BatteryTo replace the battery, proceed as
follows:
1. Remove the battery unit mounting screws and cover.
2. Remove the pins 1 and 2 on both sides of the battery.
BATTERY DIODE
1 2
3. Remove old battery.
4. Install new battery and connect the pins in correct
direction.
5. Install cover and mounting screws. Tighten securely.
BATTERY
SCREW (M4)
BASE CONNECTOR
BASE
Figure 8-2 Battery Location
8.2.2 S-axis Speed Reducer Lubrication ProcedureTo lubricate the
S-axis speed reducer, proceed as follows:
NOTE: For ceiling-mounted robot, the exhaust port and the grease
fitting locations are reversed.
CAUTION!Be sure to remove So exhaust plug before adding grease
to theS-axis speed reducer or damage to the motor may result.
1. Remove So exhaust plug (see Figure 8-3).
2. Inject 30cc (60cc for the initial lubrication) of Molywhite
RE No. 00 into theSI grease fitting.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-5 MOTOMAN
NOTE: To replace the old grease with new grease, inject 400cc of
Molywhite RE No. 00 into the SIgrease fitting, or until new grease
starts to exit the exhaust port.
S : GREASE FITTING(G NIPPLE A-PT 1/8)
I
S : EXHAUST PLUG(G NIPPLE A-PT 1/8)
O
S-AXIS SPEED REDUCER
Figure 8-3 S-axis Speed Reducer Lubrication
3. Operate the S-axis for 30 minutes to discharge any extra
grease.
4. Install the So plug and wipe the exhaust port with a clean
cloth, if necessary.
8.2.3 L- and U-axes Speed Reducers Lubrication ProceduresTo
lubricate the L- and U-axes speed reducers, proceed as follows:
1. Position U-axis within the angles shown in Figure 8-4.
20˚
10˚
30˚
Figure 8-4 U-axis Lubrication Position
CAUTION!Be sure to remove Lo and Uo exhaust plugs before adding
greaseto the L- and U-axes speed reducers or damage to the motors
mayresult.
2. Remove Lo and Uo exhaust plugs (see Figure 8-5).
3. Inject 30cc (60cc for the initial lubrication) of Molywhite
RE No. 00 into theLI and the UI grease fittings.
NOTE: To replace the old grease with new grease, inject 300cc of
Molywhite RE No. 00 into each LIand UI grease fittings, or until
new grease starts to exit the exhaust ports.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-6 MOTOMAN
U-AXIS SPEED REDUCER
L-AXIS SPEED REDUCER
U :GREASE FITTING(G NIPPLE A-PT 1/8)
L :GREASE FITTING(G NIPPLE A-PT 1/8)
U : EXHAUST PLUG(G NIPPLE A-PT 1/8)
O L : EXHAUST PLUG(G NIPPLE A-PT 1/8)
O
II
Figure 8-5 L- and U-axes Speed Reducers Lubrication
4. Operate L- and U-axes for 30 minutes to discharge the extra
grease.
5. Install the Lo and Uo plugs and wipe exhaust ports with a
clean cloth,if necessary.
8.2.4 R-axis Speed Reducer Lubrication ProcedureTo lubricate the
R-axis speed reducer, proceed as follows:
1. Remove Ro plug (see Figure 8-6).
2. Inject 8cc (16cc for the initial lubrication) of Harmonic
Grease SK-1 into theRI grease fitting.
3. Install Ro plug and wipe exhaust port with a clean cloth, if
necessary.
R-AXIS SPEED REDUCER
R :GREASE FITTING(G NIPPLE A-MT6 x 1 )
I
R : PLUG FOR AIR FLOW(HEXAGON SOCKET HEAD M6)
O
Figure 8-6 R-axis Speed Reducer Lubrication
8.2.5 B- and T-axes Speed Reducers Lubrication ProcedureTo
lubricate the B- and T-axes speed reducers, proceed as follows:
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-7 MOTOMAN
1. Remove U-arm cover (B-axis side) (see Figure 8-7).
2. Remove Bo and To plugs.
3. Inject 10cc (20cc for the initial lubrication) of Harmonic
Grease SK-1into theBI grease fitting.
4. Inject 5cc (10cc for the initial lubrication) of Harmonic
Grease SK-1 into theTI grease fitting.
B-AXIS SPEED REDUCER
T-AXIS SPEED REDUCER
U-ARM COVER(B-AXIS SIDE)
T : PLUG FOR AIR FLOW(HEXAGON SOCKET HEAD M6)
O
T : GREASE FITTING(G NIPPLE A-MT6 x1)
I
B : GREASE FITTING (G NIPPLE A-MT6 x1)
I
B : PLUG FOR AIR FLOW (G NIPPLE A-MT6 x1)
O
Figure 8-7 B- and T-axes Speed Reducer Lubrication
5. Reinstall the Bo and To plugs and wipe exhaust ports with a
clean cloth, ifnecessary.
6. Install the U-arm cover (B-axis side).长沙
工控帮教
育科技有
限公司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-8 MOTOMAN
8.2.6 T-axis Gear Lubrication Procedure1. Remove To plug (see
Figure 8-8).
2. Inject 5cc (10cc for the initial lubrication) of Harmonic
Grease SK into theGEARI grease fitting.
3. Install the To plug and wipe exhaust port with a clean cloth,
if necessary.
GEAR : GREASE FITTING (G NIPPLE A-MT6 x 1)
I
T : PLUG FOR AIR FLOW(HEXAGON SOCKET HEAD M6)
O
Figure 8-8 T-axis Gear Lubrication
8.2.7 L-axis Cross Roller Bearing Lubrication ProcedureTo
lubricate the L-axis cross roller bearing, proceed as follows (see
Figure 8-9):
1. Inject 5cc of Alvania EP Grease 2 into the Lc grease
fitting.
2. Wipe grease fitting with a clean cloth, if necessary.
L-AXIS CROSSROLLER BEARING
L : GREASE FITTING (G NIPPLE A-MT6x1)
C
Figure 8-9 L-axis Cross Roller Bearing
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
MAINTENANCE
SK16 Manipulator Instructions 8-9 MOTOMAN
8.2.8 R-axis Cross Roller Bearing, L- and U-axes Link, and Link
TaperRoller Bearing Lubrication ProceduresTo lubricate the R-axis
cross roller bearings, L- and U-axes link, and the link taperroller
bearing, proceed as follows:
1. Remove plugs 1 through 4 (see Figure 8-10).
1LINK : TAPERROLLER BEARING x 2
2LINK : TAPERROLLER BEARING x 1
2 : PLUG FOR AIR FLOW (LP-M5)
: PLUG FOR AIR FLOW (LP-M5)
4LINK : CROSS ROLLER BEARING
4
LINK : GREASE FITTING(G NIPPLE A-MT6x1)
4
: PLUG FOR AIR FLOW (LP-M5x2)
1
: PLUG FOR AIR FLOW (LP-M5)3
LINK : TAPERROLLER BEARING
3
LINK : GREASE FITTING(G NIPPLE A-MT6x1)
2
LINK : GREASE FITTING(G NIPPLE A-MT6x2)
1
3LINK : GREASE FITTING(G NIPPLE A-MT6x1)
1LINK : TAPERROLLER BEARING x 2
Figure 8-10 R-axis Cross Roller Bearing, L and U-axes Link, and
Link Taper RollerBearing Lubrication
2. Inject 3cc (6cc for the initial lubrication) of Alvania EP
Grease 2 into links 1
through 4 grease fittings.
3. Install plugs 1 through 4 .
4. Wipe grease fittings with a clean cloth, if necessary.
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 9-1 MOTOMAN
SECTION 9
RECOMMENDED SPARE PARTSTable 9-1 lists parts that are
recommended stock as spare parts for the SK16 robotand are ranked
as follows:
Rank A: Expendable and frequently replaced parts
Rank B: Parts for which replacement may be necessary as a result
of frequent operation.
Rank C: Drive unit
NOTE: For replacing parts rank B and C, contact your MOTOMAN
representative.
Table 9-1 Spare Parts for SK16 Robot
No. Rank Part Name Type Manufacturer Qty.Qty.perUnit
Remarks
1 A Limit Switch set HW9470694-A Yaskawa Electric Corp. 1 1
S-axis, lead terminaltreatment completion
2 A Grease Molywhite RENo. 00
Yaskawa Electric Corp. 16 kg
3 A Grease Harmonic GreaseSK-1
Harmonic Drive SystemCo., Ltd.
2.5 kg
4 A Grease Alvania EPGrease 2
Showa Oil Co., Ltd. 16 kg
5 A Battery unit HW8471030-A Yaskawa Electric Corp. 1 1
6 B R-axis timing belt 60S4.5 M441 Mitsuboshi Belting Ltd. 1
1
7 B S-axis speedreducer
HW9280613-A Yaskawa Electric Corp. 1 1
8 B L- and U-axesspeed reducer
HW9280614-A Yaskawa Electric Corp. 1 2
9 B R-axis drive unit HW9370855-A Yaskawa Electric Corp. 1 1
10 C AC servomotor forS-axis
HW9380768-A Yaskawa Electric Corp. 1 2 With brake, with key,lead
terminal treatmentcompletion
11 C AC servo motorfor L- and U-axes
HW9380635-A Yaskawa Electric Corp. 1 1 With brake, with key,lead
terminal treatmentcompletion
12 C AC servo motorfor R-axis
HW9380837-A Yaskawa Electric Corp. 1 1 With brake, with key,lead
terminal treatmentcompletion
13 C Wrist unit HW9171193-A Yaskawa Electric Corp. 1 1
14 C Internal wiring HW9170901-A Yaskawa Electric Corp. 1 1
15 C B- and T-axesinternal wiring
HW9370774-A Yaskawa Electric Corp. 1 1 In U-arm
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Manipulator Instructions 10-1 MOTOMAN
SECTION 10
PARTS LISTThis section provides illustrations and parts lists
for SK16 replacement parts and isbroken down in the following
manner:
• S-axis Driving Unit
• L-, U-axes Driving Unit
• R-axis Driving Unit
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-2 MOTOMAN
10.1 S-axis Driving Unit
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-3 MOTOMAN
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-4 MOTOMAN
10.2 L- and U-axes Driving Unit
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-5 MOTOMAN
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-6 MOTOMAN
10.3 R-axis Driving Unit
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-7 MOTOMAN
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-8 MOTOMAN
10.4 Wrist Unit
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
PARTS LIST
SK16 Manipulator Instructions 10-9 MOTOMAN
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
INDEX
SK16 Manipulator Instructions MOTOMAN
AAllowable Load on U-axis, 6-1Allowable Wrist Load, 5-1Alterable
Working Range, 4-3
BB- and T-axes Speed Reducers
Lubrication Procedure, 8-7Basic Specification, 4-1
CCable Connection, 3-2Conducting a Safety/Operation Check,
3-4Connecting the Earth Grounds, 3-1
DDimensions and Working Ranges, 4-2
IIncorporated Wire and Airduct, 6-2Installation, 2-1Internal
Connections, 7-1
LL- and U-axes Driving Unit, 10-4,L- and U-axes Speed
Reducers
Lubrication Procedures, 8-5L-axis Cross Roller Bearing
Lubrication
Procedure, 8-8List of Figures, iiList of Tables, iii
MMaintenance Procedures, 8-4Maintenance, 8-1Mounting Equipment,
6-1Mounting SK16 on the Wall or Ceiling, 2-4Mounting the SK16 on
the Floor, 2-3
NNomenclature and Working Axes, 4-2
PParts List, 10-1Position of Limit Switches, 7-1Positioning the
SK16, 2-1Precautions for Allowable Wrist Load, 5-1Preventive
Maintenance, 8-1
RR-axis Cross Roller Bearing, L- and U-axes
Link, and Link Taper Roller BearingLubrication Procedures,
8-9
R-axes Driving Unit, 10-6R-axis Speed Reducer Lubrication
Procedure, 8-6Receiving, 1-1Recommended Spare Parts, 9-1Replacing
the Battery, 8-4Robot Construction, 7-1
SS-axis Driving Unit, 10-2S-axis Speed Reducer Lubrication
Procedure, 8-4Safety Guards, 2-5Selecting a Location,
2-1Specifications, 4-1
TT-axis Gear Lubrication Procedure, 8-8
WWiring, 3-1Working Range of B-axis, 4-3Wrist Flange, 5-2Wrist
Unit, 10-8
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
CHAPTER 4
SK16 DUAL MRCINSTRUCTIONS
March 31, 1998
MOTOMAN805 Liberty Lane
West Carrollton, OH 45449TEL: (937) 847-6200 FAX: (937)
847-627724-HOUR SERVICE HOTLINE: (937) 847-3200
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
长沙工控
帮教育科
技有限公
司
工控帮助教小舒QQ:2823408167
-
SK16 Dual MRC Instructions i MOTOMAN
TABLE OF CONTENTS Section Page
LIST OF
FIGURES.............................................................................................................
iii
LIST OF TABLES
...............................................................................................................
v
1
INTRODUCTION.......................................................................................................1-1
1.1 About the SK16 Dual MRC Controller
......................................................... 1-1
1.2 About this
Document..................................................................................1-1
1.3 Reference to Other Documentation
............................................................1-2
1.4 Customer Service
Information....................................................................1-2
2 EQUIPMENT DESCRIPTION
....................................................................................2-1
2.1 External Components
.................................................................................2-1
2.1.1 Playback Box
..................................................................................2-22.1.2
Programming
Pendant....................................................................2-52.1.3
Brake Release
...............................................................................2-14
2.2 Internal Components
................................................................................2-15
2.2.1 Incoming Voltage
.........................................................................
2-152.2.2 Cooling
System.............................................................................
2-152.2.3 Servopacks
...................................................................................2-162.2.4
Contactor Unit
..............................................................................2-172.2.5
I/O Rack
Configuration..................................................................2-182.2.6
CPU Rack Configuration
...............................................................2-19
2.3 Diagnostic Displays
..................................................................................2-20
2.3.1 Input Status
Displays....................................................................2-212.3.2
Output Status Displays
.................................................................
2-222.3.3 RIN Input
Display..........................................................................2-222.3.4
System Monitoring Time Displays
................................................2-232.3.5 Alarm
List Displays
.......................................................................2-242.3.6
Servo
Display................................................................................2-26
2.4 Alarms and Errors
....................................................................................2-28
2.4.1 Error
Messages.............................................................................
2-282.4.2 Minor
Alarms................................................................................2-282.4.3
Major Alarms
................................................................................2-28
2.5 Specifications
...........................................................................................2-29
3 BASIC
OPERATION..................................................................................................3-1
3.1 Using the ENABLE Switch ........