Embed Size (px)
Citation preview
Small-scale Structural Health
Monitoring in the Cloud
DDDAS PI Meeting Dec 1-3 2014 1
Tom Henderson, PI
DDDAS PI Meeting
Yorktown Heights, NY
1-3 December 2014

Colleagues
Dan Adams V. John
Mathews
Sabita
Nahata Jingru
Zhou
Sungwon
Kim Bibhisha
Uprety
Anshul
Joshi
Tom Henderson Eddie Grant
Wenyi
Wang
DDDAS PI Meeting Dec 1-3 2014 2

2020 Vision for SHM http://www.cs.wright.edu/~jslater/SDTCOutreachWebsite/pic13.pdf
DDDAS PI Meeting Dec 1-3 2014 3
Mid-Year Results
• “A Comparative Evaluation of Piezoelectric Sensors for Acoustic Emission-
Based Impact Location Estimation and Damage Classification in Composite
Structure,” B. Uprety, S. Kim, D.O. Adams, and V.J. Mathews, 41st Annual
Review of Progress in Quantitative NDE, Boise, ID, July, 2014.
• “Numerical Simulation and Experimental Validation of Lamb Wave
Propagation Behavior in Composite Plates,” S. Kim, B. Uprety, D.O. Adams,
and V.J. Mathews, 41st Annual Review of Progress in Quantitative NDE,
Boise, ID, July, 2014.
• “Impact Location Estimation in Anisotropic Structures,” J. Zhou and V.J.
Mathews, 41st Annual Review of Progress in Quantitative NDE, Boise, ID,
July, 2014.
• “Damage Mapping in Structural Health Monitoring Using a Multi-Grid
Architecture,” V.J. Mathews, 41st Annual Review of Progress in Quantitative
NDE, Boise, ID, July, 2014.
DDDAS PI Meeting Dec 1-3 2014 4
Mid-Year Results (cont’d)
• “SLAMBOT: Structural Health Monitoring using Lamb Waves,'' W. Wang,
T.C. Henderson, A. Joshi and E. Grant, IEEE Conference on Multisensor
Fusion and Integration for Intelligent Systems, Beijing, Sept. 28-30, 2014.
• “Generative Cognitive Representation for Embodied Agents,'' A. Joshi
and T.C. Henderson, IEEE Conference on Multisensor Fusion and
Integration for Intelligent Systems, Beijing, Sept. 28-30, 2014.
• “Symmetry Based Semantic Analysis of Engineering Drawings,'' T. C.
Henderson, N. Boonsirisumpun and A. Joshi, IEEE Conference on
Multisensor Fusion and Integration for Intelligent Systems, Beijing, Sept.
28-30, 2014.
DDDAS PI Meeting Dec 1-3 2014 5
Goal: Replace Schedule-based Maintenance
with Condition-based Maintenance
Schedule-based
• Structural design
• Perform full-scale fatigue testing
and identify problem areas
• Construct inspection schedule
Condition-based
• Monitor aircraft continuously for
problems
• Do maintenance based on the
state of the structure as need
arises
Increases availability
Reduces maintenance costs
Increases reliability
DDDAS PI Meeting Dec 1-3 2014 6

SHM Needs in New Composite Airplanes
• Assess the flightworthiness of airplanes
each time before they take off
http://www.stanford.edu/~gorin/papers/IWSHM2007OptEst.pdf DDDAS PI Meeting Dec 1-3 2014 7
Advantages of DDDAS Approach
for Lamb Wave SHM
• The multimodal and dispersive characteristics of
Lamb waves may change due to changes in
environmental conditions and structural properties.
• This may result in failure of models (used to locate
and characterize damage) based on previous
knowledge of the medium.
• In the data driven approach, the models are
developed based on the data collected from the
experiments.
• The inference about the location, type and extent of
damage is drawn based on these models.
DDDAS PI Meeting Dec 1-3 2014 8
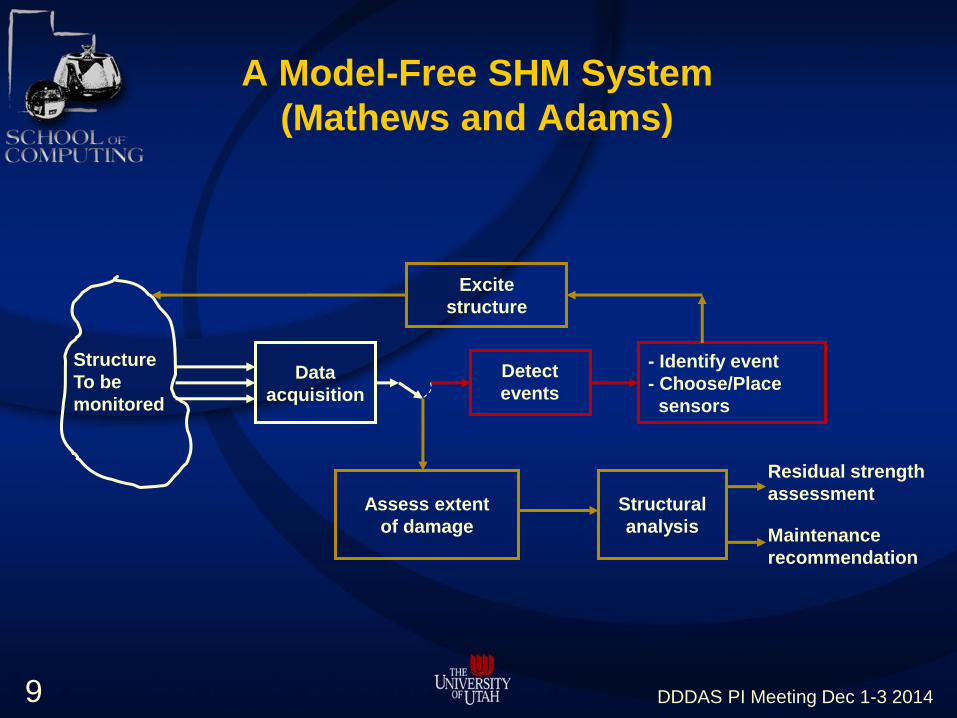
A Model-Free SHM System
(Mathews and Adams)
Data
acquisition
Structure
To be
monitored
Detect
events
- Identify event
- Choose/Place
sensors
Excite
structure
Assess extent
of damage
Structural
analysis
Residual strength
assessment
Maintenance
recommendation
DDDAS PI Meeting Dec 1-3 2014 9
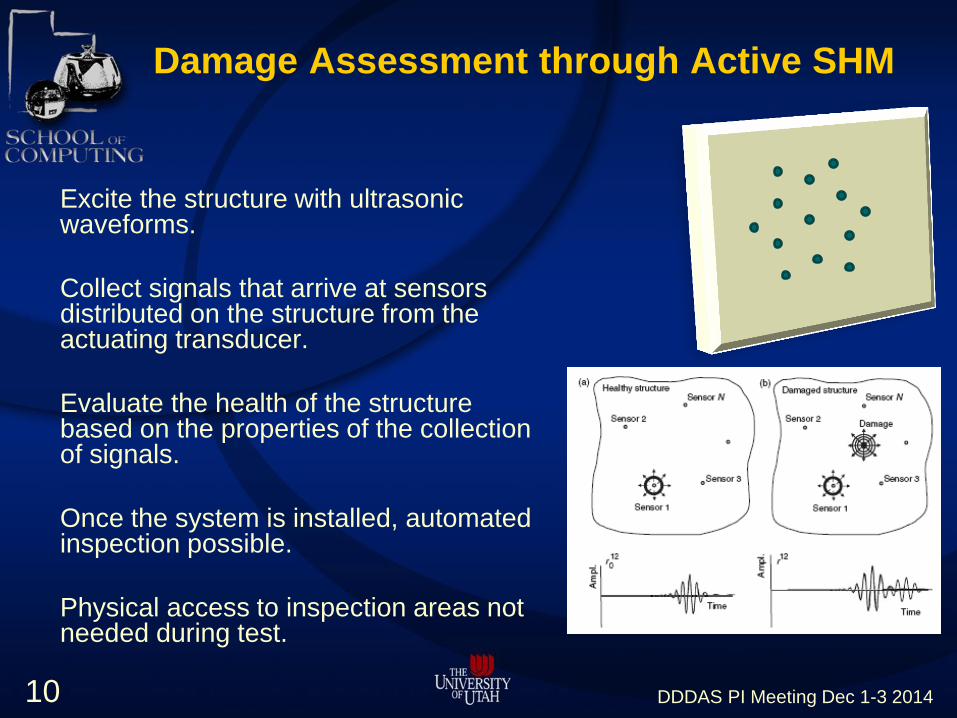
Damage Assessment through Active SHM
Excite the structure with ultrasonic waveforms.
Collect signals that arrive at sensors distributed on the structure from the actuating transducer.
Evaluate the health of the structure based on the properties of the collection of signals.
Once the system is installed, automated inspection possible.
Physical access to inspection areas not needed during test.
DDDAS PI Meeting Dec 1-3 2014 10
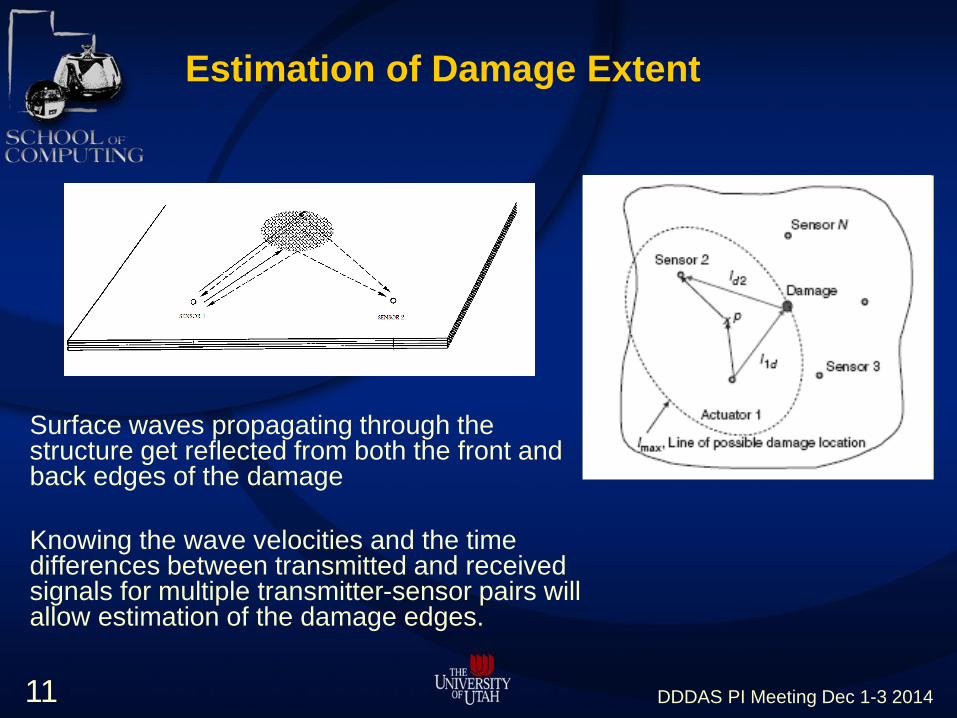
Estimation of Damage Extent
Surface waves propagating through the structure get reflected from both the front and back edges of the damage
Knowing the wave velocities and the time differences between transmitted and received signals for multiple transmitter-sensor pairs will allow estimation of the damage edges.
DDDAS PI Meeting Dec 1-3 2014 11
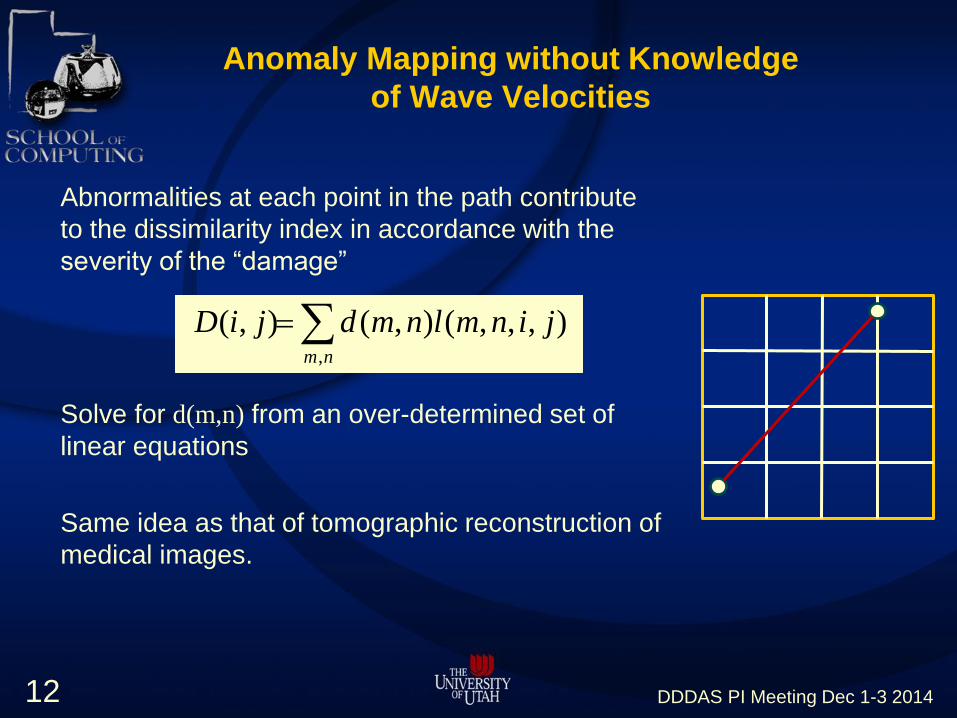
Anomaly Mapping without Knowledge
of Wave Velocities
Abnormalities at each point in the path contribute
to the dissimilarity index in accordance with the
severity of the “damage”
Solve for d(m,n) from an over-determined set of
linear equations
Same idea as that of tomographic reconstruction of
medical images.
nm
jinmlnmdjiD,
),,,(),(),(
DDDAS PI Meeting Dec 1-3 2014 12
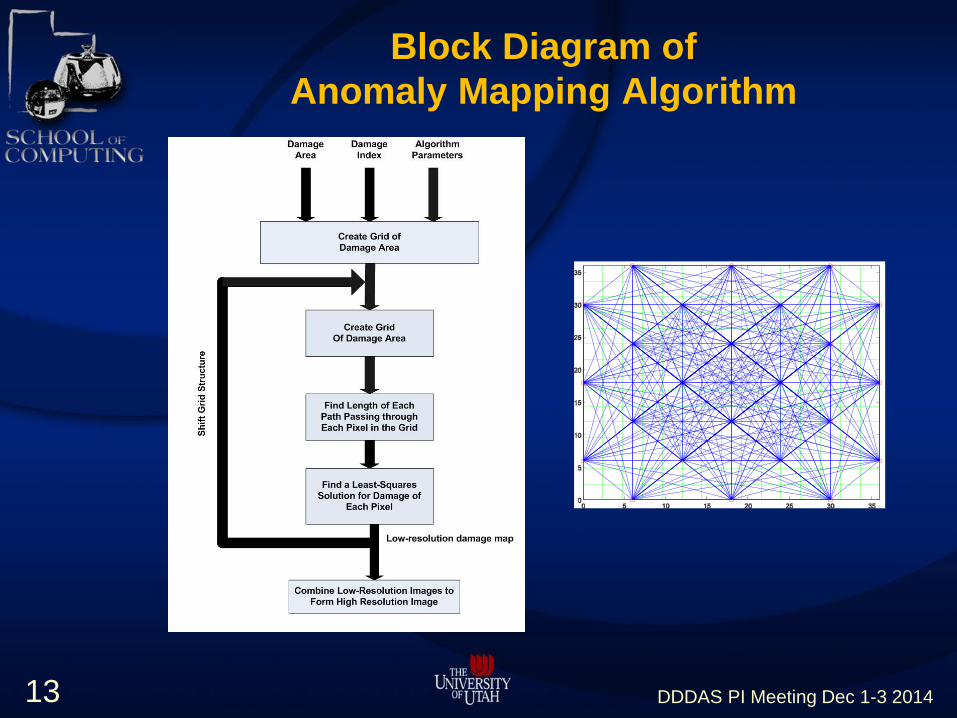
Block Diagram of
Anomaly Mapping Algorithm
DDDAS PI Meeting Dec 1-3 2014 13
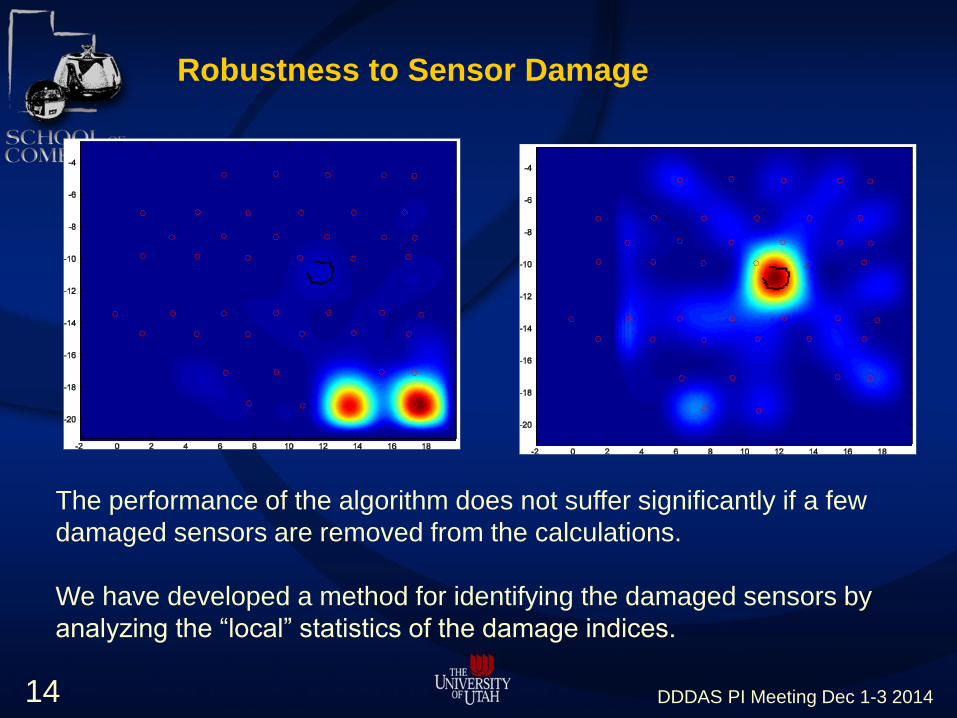
Robustness to Sensor Damage
The performance of the algorithm does not suffer significantly if a few
damaged sensors are removed from the calculations.
We have developed a method for identifying the damaged sensors by
analyzing the “local” statistics of the damage indices.
DDDAS PI Meeting Dec 1-3 2014 14
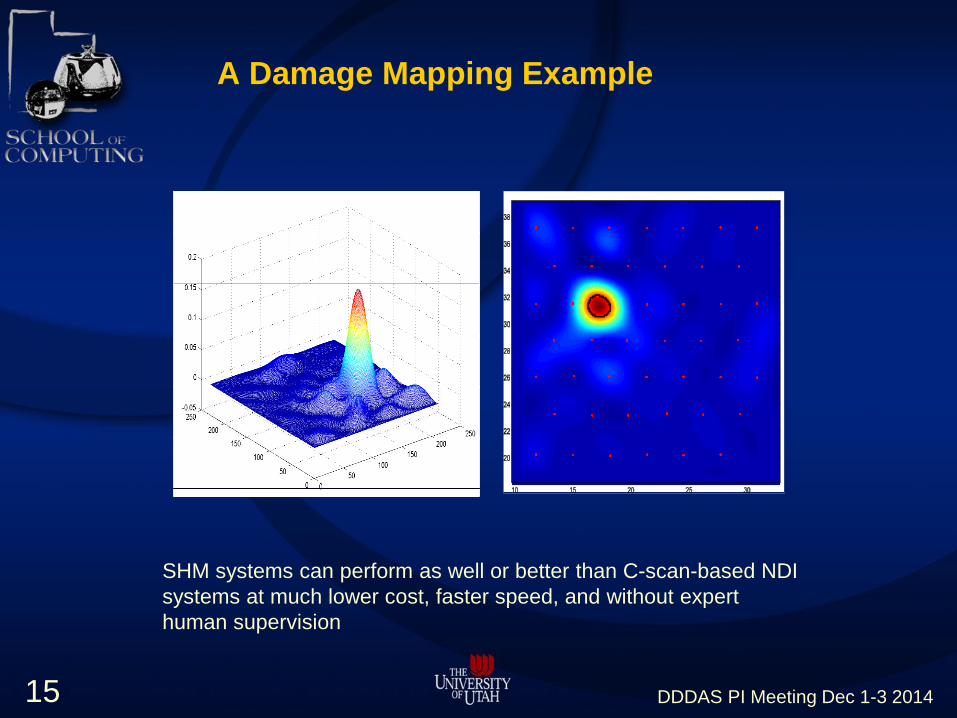
A Damage Mapping Example
SHM systems can perform as well or better than C-scan-based NDI
systems at much lower cost, faster speed, and without expert
human supervision
DDDAS PI Meeting Dec 1-3 2014 15
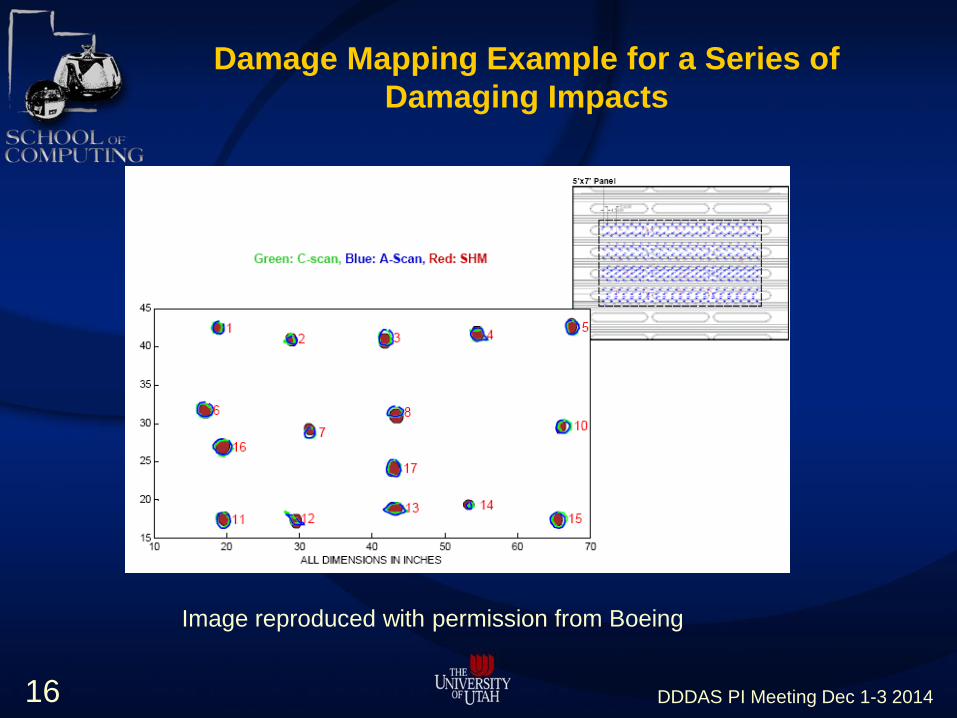
Damage Mapping Example for a Series of
Damaging Impacts
Image reproduced with permission from Boeing
DDDAS PI Meeting Dec 1-3 2014 16
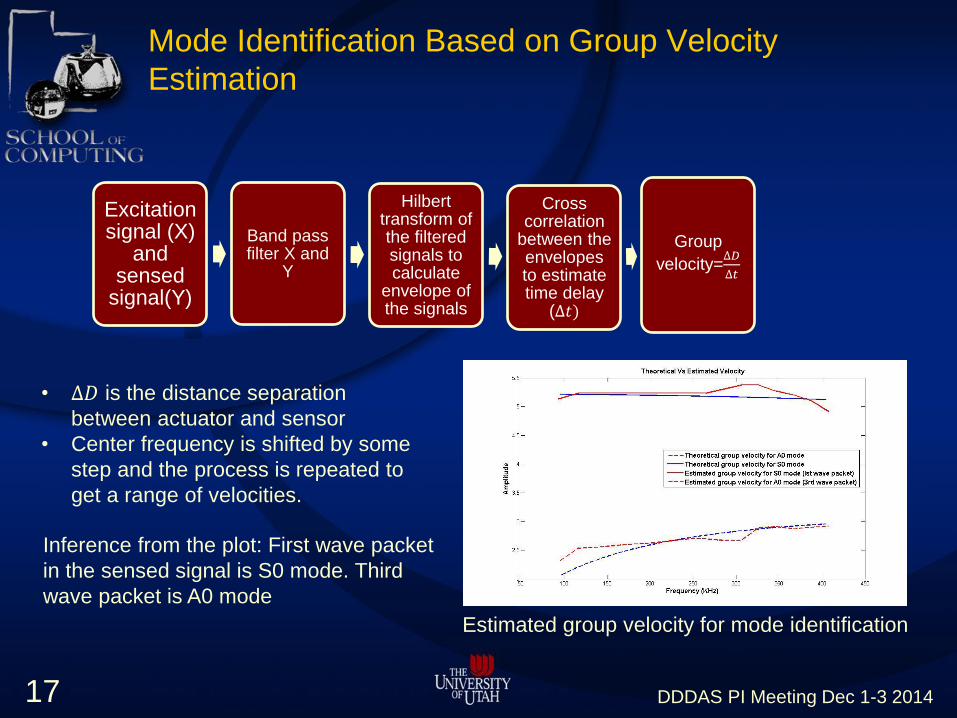
Mode Identification Based on Group Velocity
Estimation
Excitation signal (X)
and sensed
signal(Y)
Band pass filter X and
Y
Hilbert transform of the filtered signals to calculate
envelope of the signals
Cross correlation
between the envelopes to estimate time delay
(∆𝑡)
Group
velocity=∆𝐷
∆𝑡
• ∆𝐷 is the distance separation
between actuator and sensor
• Center frequency is shifted by some
step and the process is repeated to
get a range of velocities.
Inference from the plot: First wave packet
in the sensed signal is S0 mode. Third
wave packet is A0 mode
Estimated group velocity for mode identification
DDDAS PI Meeting Dec 1-3 2014 17
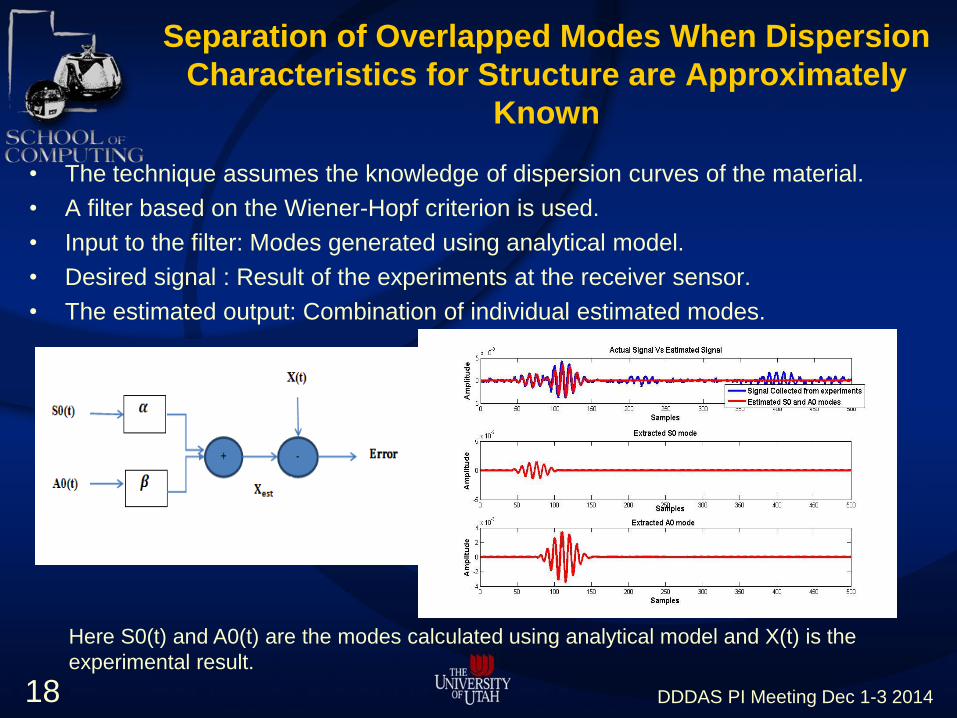
Separation of Overlapped Modes When Dispersion
Characteristics for Structure are Approximately
Known
• The technique assumes the knowledge of dispersion curves of the material.
• A filter based on the Wiener-Hopf criterion is used.
• Input to the filter: Modes generated using analytical model.
• Desired signal : Result of the experiments at the receiver sensor.
• The estimated output: Combination of individual estimated modes.
Here S0(t) and A0(t) are the modes calculated using analytical model and X(t) is the
experimental result.
DDDAS PI Meeting Dec 1-3 2014 18
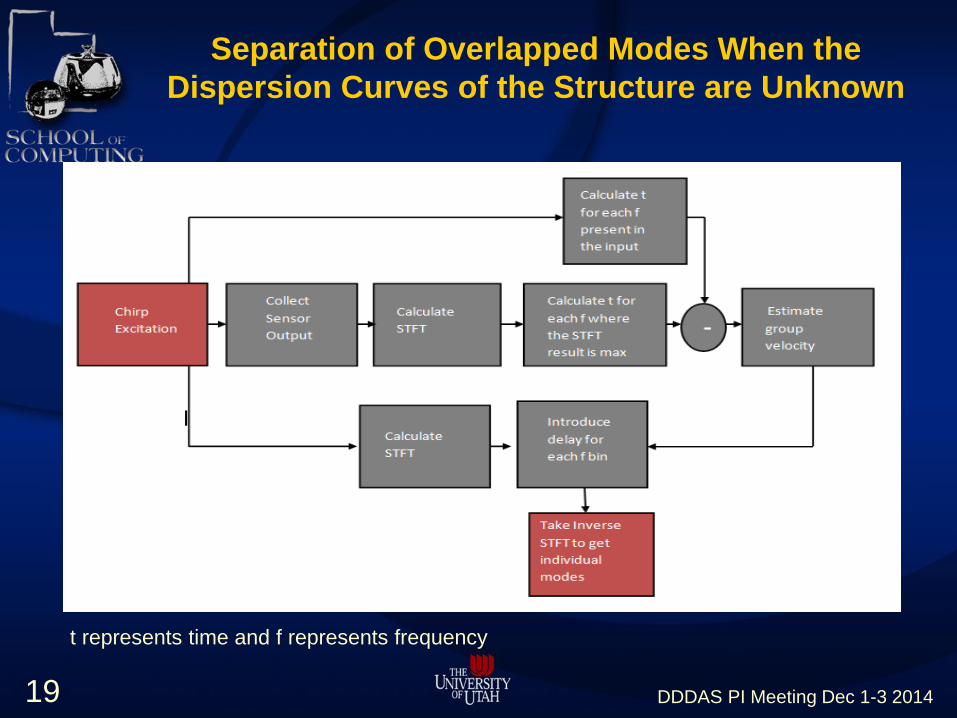
Separation of Overlapped Modes When the
Dispersion Curves of the Structure are Unknown
t represents time and f represents frequency
DDDAS PI Meeting Dec 1-3 2014 19
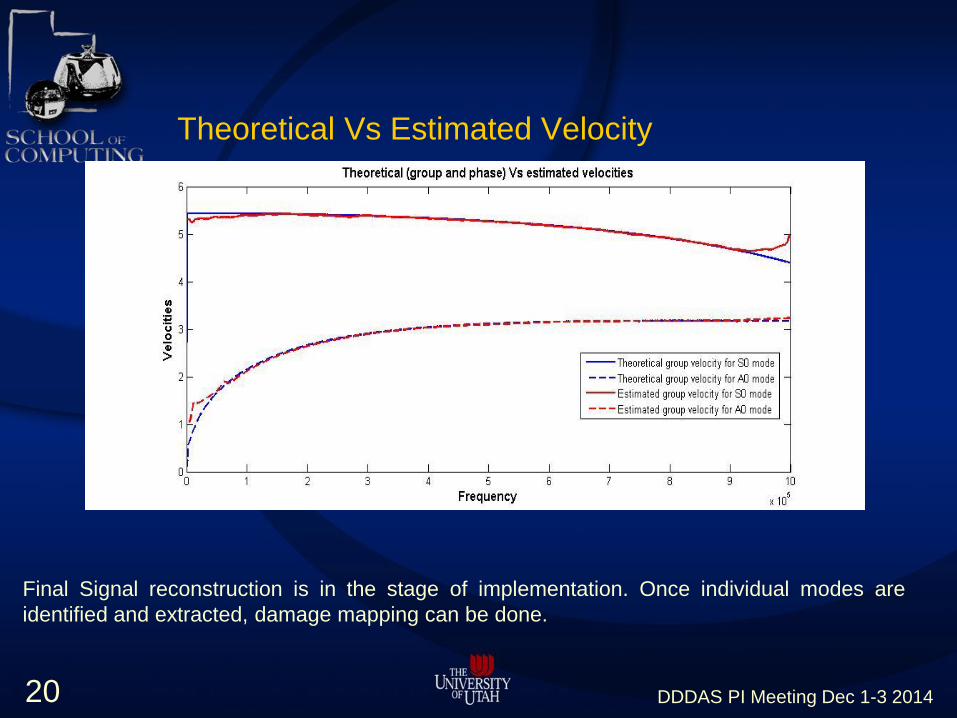
Theoretical Vs Estimated Velocity
Final Signal reconstruction is in the stage of implementation. Once individual modes are
identified and extracted, damage mapping can be done.
DDDAS PI Meeting Dec 1-3 2014 20
Wave Propagation using
Lamb Waves and Born
Linearization (Wenyi Wang)
DDDAS PI Meeting Dec 1-3 2014 21
• Imaging using Kirchoff migration
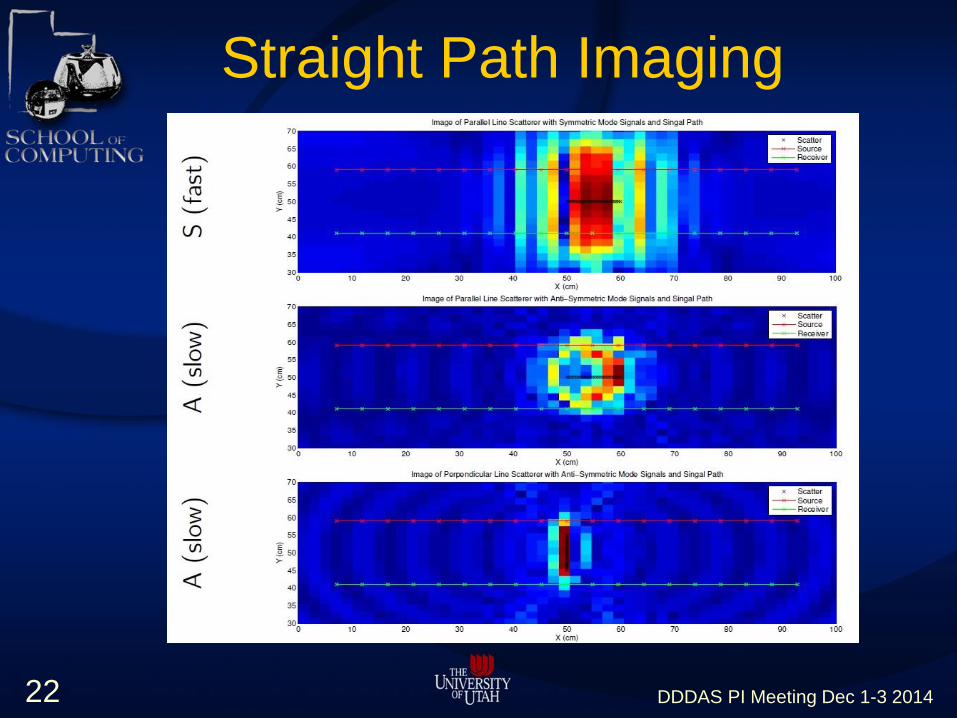
Straight Path Imaging
DDDAS PI Meeting Dec 1-3 2014 22
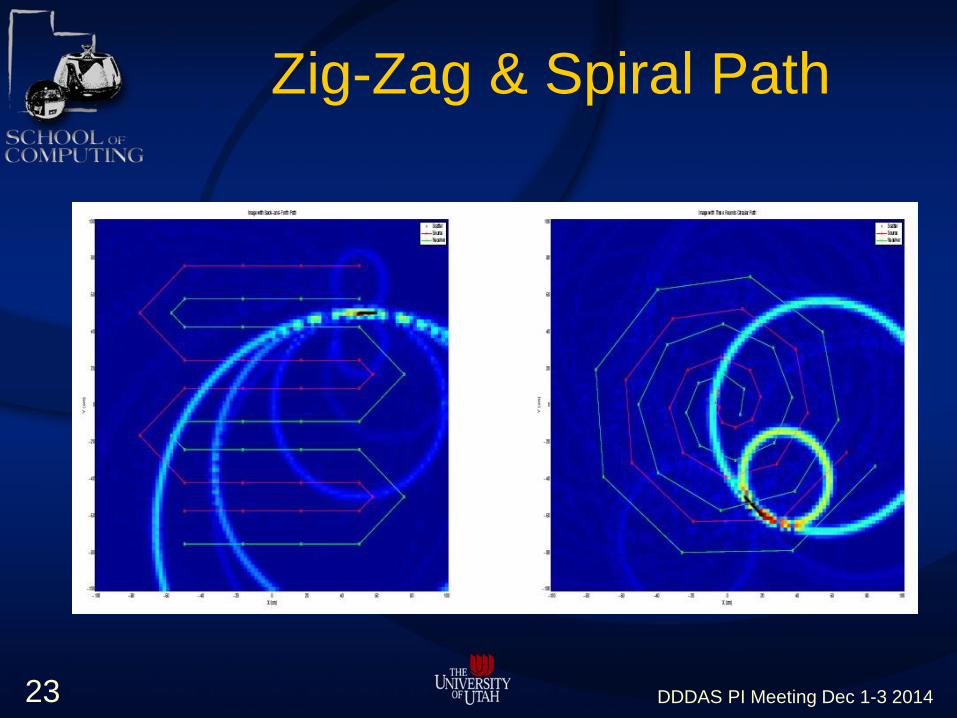
Zig-Zag & Spiral Path
DDDAS PI Meeting Dec 1-3 2014 23
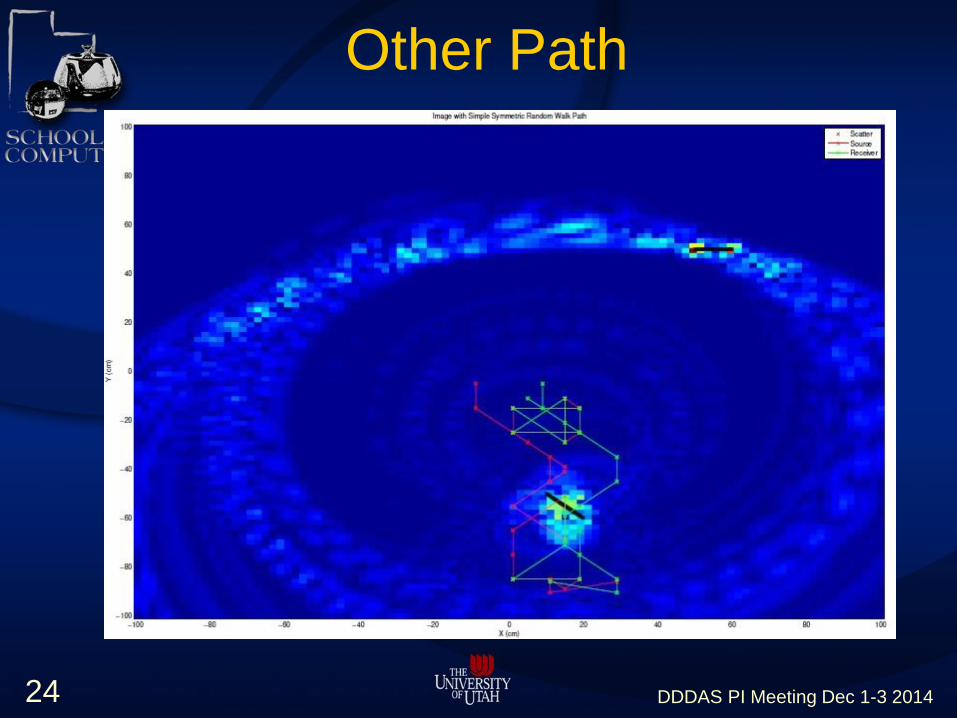
Other Path
DDDAS PI Meeting Dec 1-3 2014 24
Remaining Issues
• Quantify resolution of image given
robot path
• Quantify resolution of image with
randomly generated robot path
• Find best next move of the robot
given observed data
• Propagation of robot position
uncertainties
DDDAS PI Meeting Dec 1-3 2014 25
DDDAS Major Objectives
1. Bayesian Computational Sensor
Networks
• Detect & identify structural damage
• Quantify physical phenomena and
sensors
• Characterize uncertainty in calculated
quantities of interest (real and Boolean
– i.e., logical statements)
DDDAS PI Meeting Dec 1-3 2014 26
Major Objectives (cont’d)
2. Active feedback methodology using
model-based sampling regimes
• Embedded and active sensor placement
• On-line sensor model validation
• On-demand sensor complementarity
DDDAS PI Meeting Dec 1-3 2014 27
Major Objectives (cont’d)
3. Rigorous uncertainty models of:
• System states
• Model parameters
• Sensor network parameters (e.g., location,
noise)
• Material damage assessments
DDDAS PI Meeting Dec 1-3 2014 28
Major Objectives (cont’d):
4. Exploit Grid or Cloud Resources:
• Real-time Data Storage
• Real-time On-line Sensor Reading
• Model Simulation and Calibration
• Information Feedback
DDDAS PI Meeting Dec 1-3 2014 29
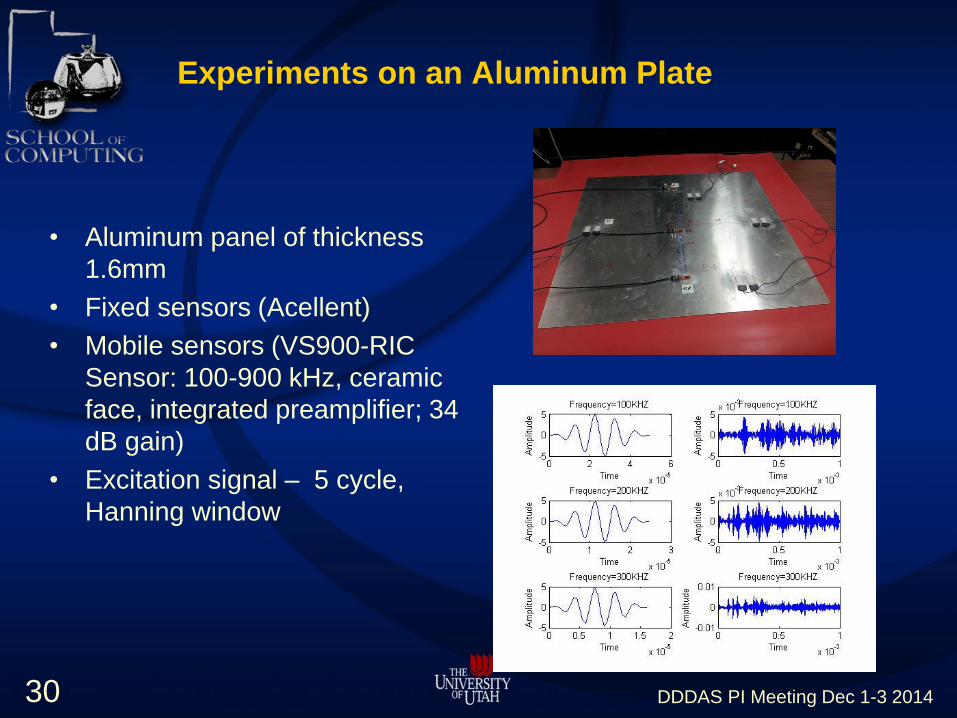
Experiments on an Aluminum Plate
• Aluminum panel of thickness
1.6mm
• Fixed sensors (Acellent)
• Mobile sensors (VS900-RIC
Sensor: 100-900 kHz, ceramic
face, integrated preamplifier; 34
dB gain)
• Excitation signal – 5 cycle,
Hanning window
DDDAS PI Meeting Dec 1-3 2014 30
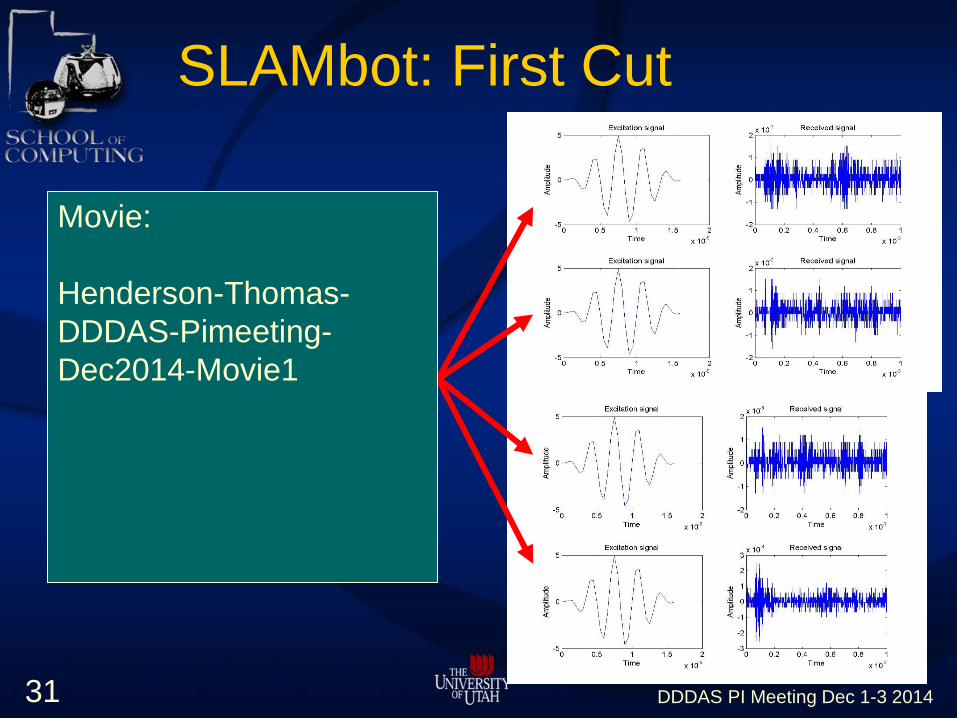
SLAMbot: First Cut
DDDAS PI Meeting Dec 1-3 2014 31
Movie:
Henderson-Thomas-
DDDAS-Pimeeting-
Dec2014-Movie1
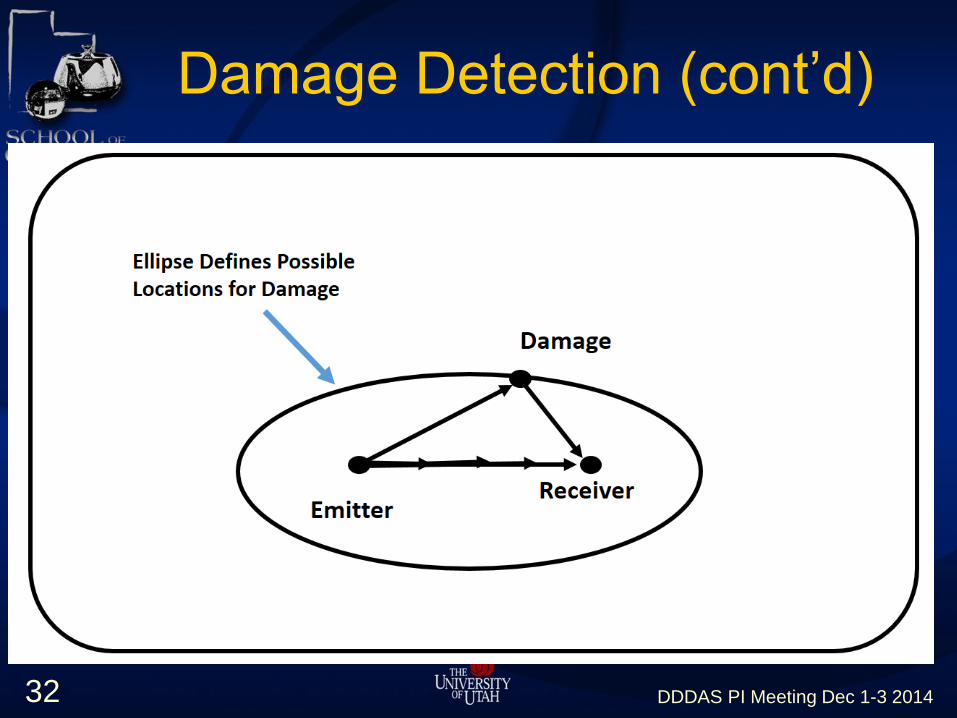
Damage Detection (cont’d)
DDDAS PI Meeting Dec 1-3 2014 32
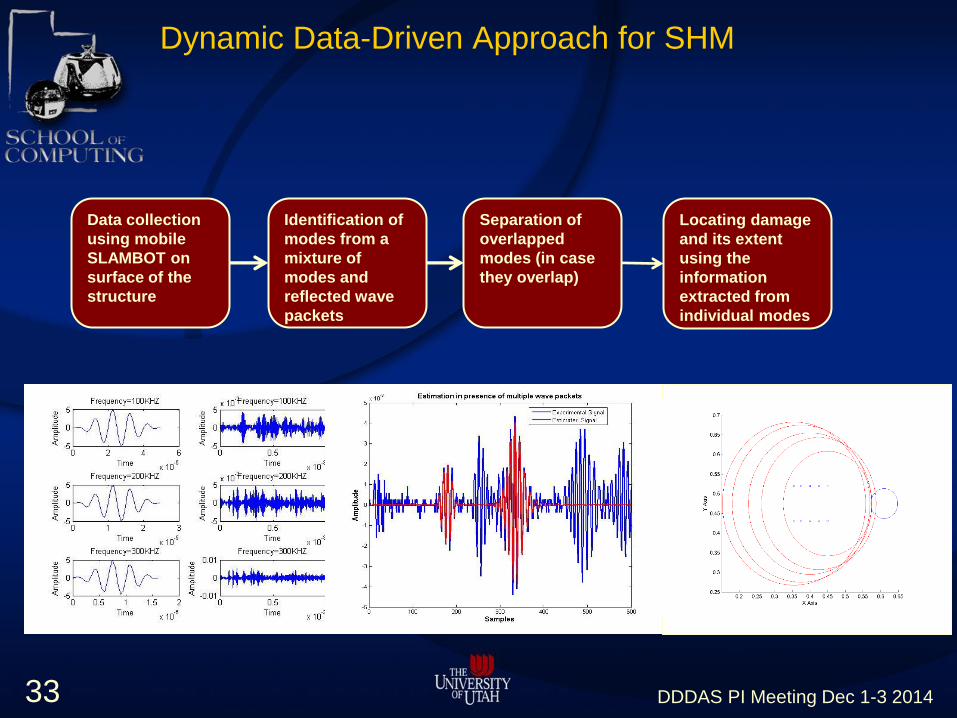
Dynamic Data-Driven Approach for SHM
Data collection
using mobile
SLAMBOT on
surface of the
structure
Identification of
modes from a
mixture of
modes and
reflected wave
packets
Separation of
overlapped
modes (in case
they overlap)
Locating damage
and its extent
using the
information
extracted from
individual modes
DDDAS PI Meeting Dec 1-3 2014 33
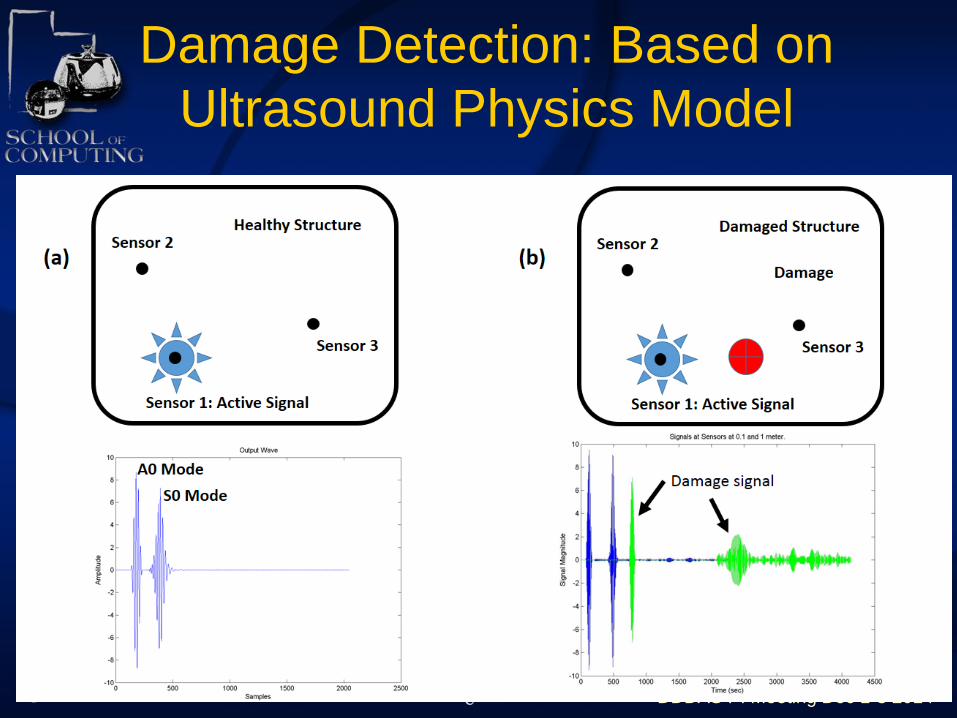
Damage Detection: Based on
Ultrasound Physics Model
DDDAS PI Meeting Dec 1-3 2014 34
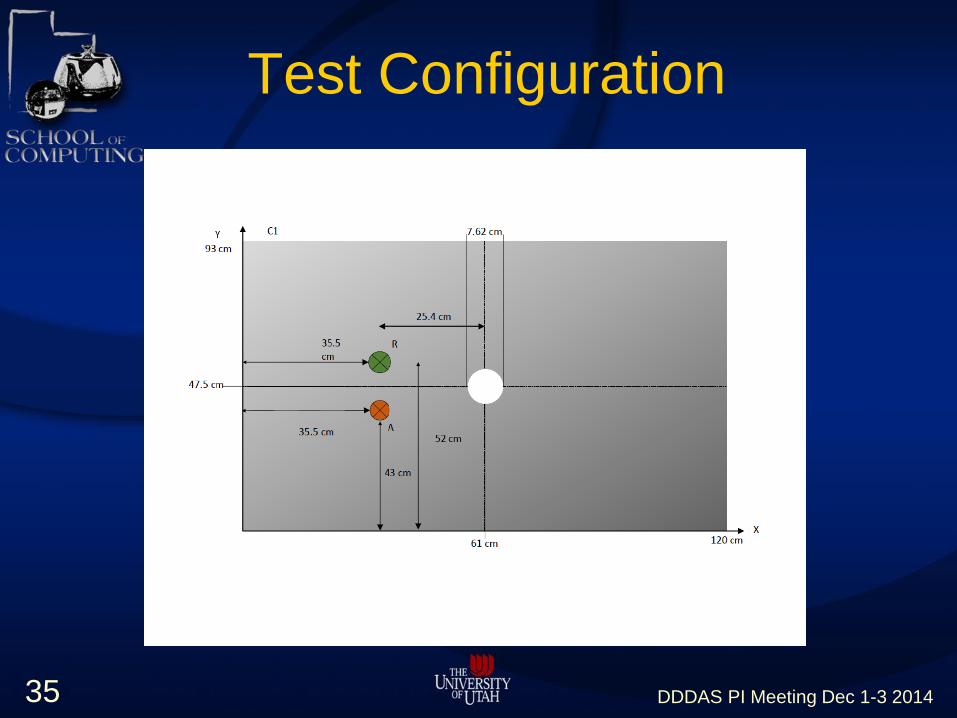
Test Configuration
DDDAS PI Meeting Dec 1-3 2014 35
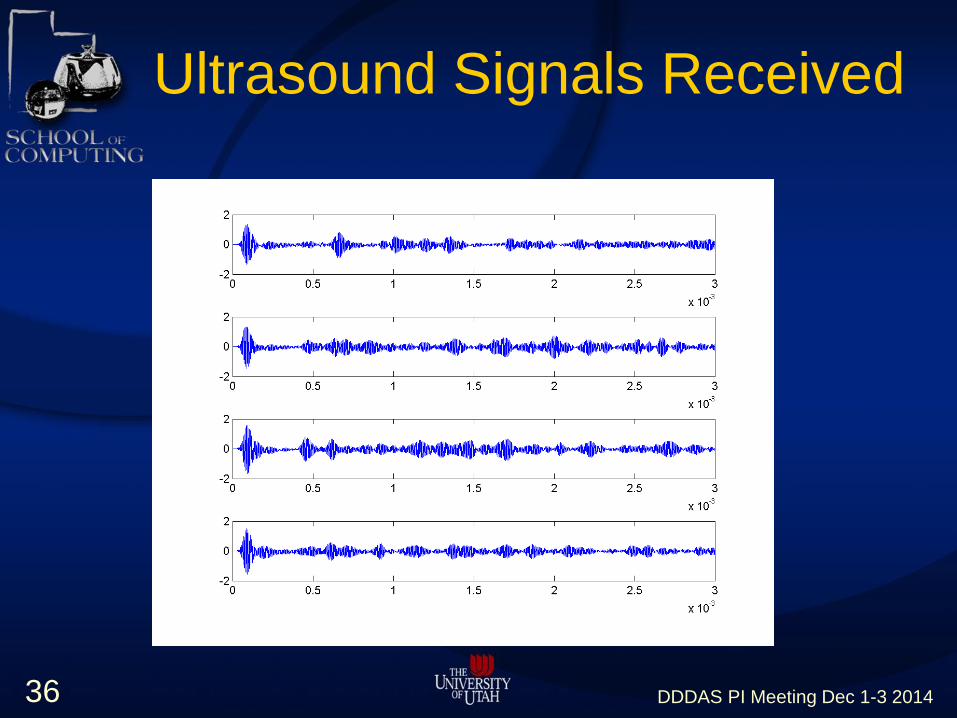
Ultrasound Signals Received
DDDAS PI Meeting Dec 1-3 2014 36
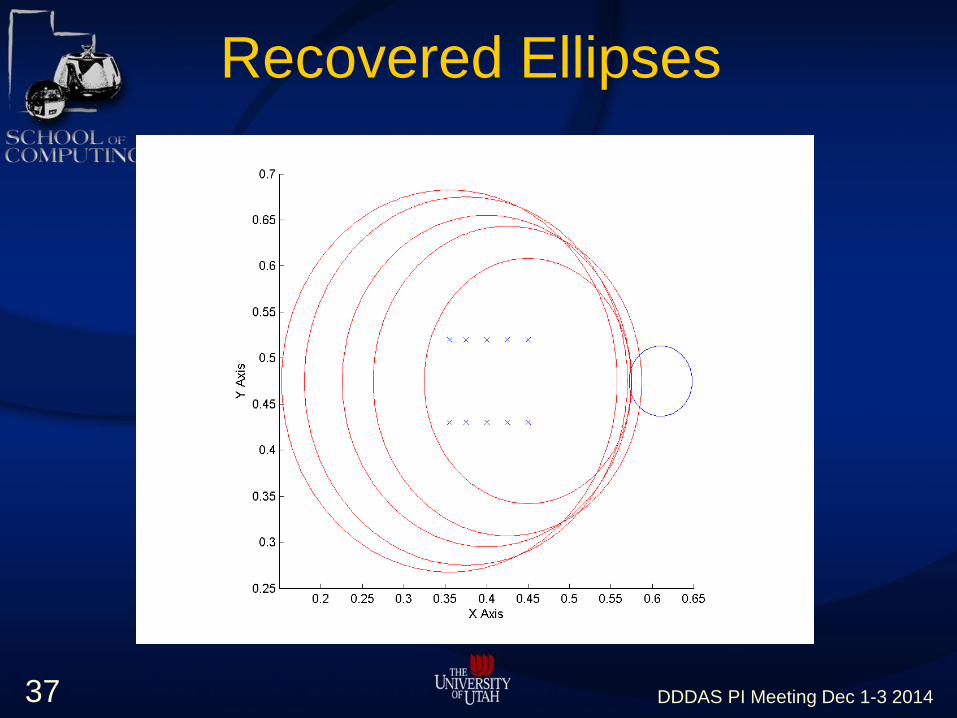
Recovered Ellipses
DDDAS PI Meeting Dec 1-3 2014 37
SLAM Exploitation
• Lamb Wave Data (ellipses) provide
landmarks that are incorporated into
SLAM algorithm
• Robot Motion Model based on standard 2-
track model
• Uncertainties characterized by Lamb wave
properties and motion error
DDDAS PI Meeting Dec 1-3 2014 38
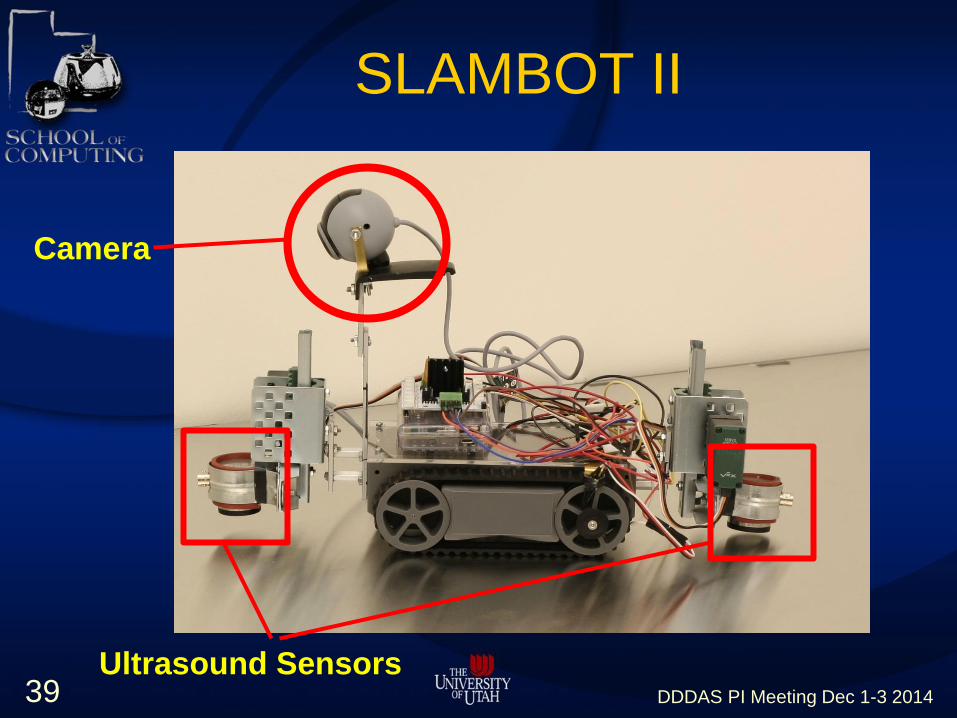
SLAMBOT II
DDDAS PI Meeting Dec 1-3 2014 39
Camera
Ultrasound Sensors
EKF SLAM
• Estimate 𝑝(𝑥𝑡, 𝑚|𝑧 1:𝑡 , 𝑢 1:𝑡 )
where
𝑥𝑡: robot’s pose at time t
𝑚: map of environment
𝑧 1:𝑡 : sensor measurements
𝑢 1:𝑡 : control values
DDDAS PI Meeting Dec 1-3 2014 40
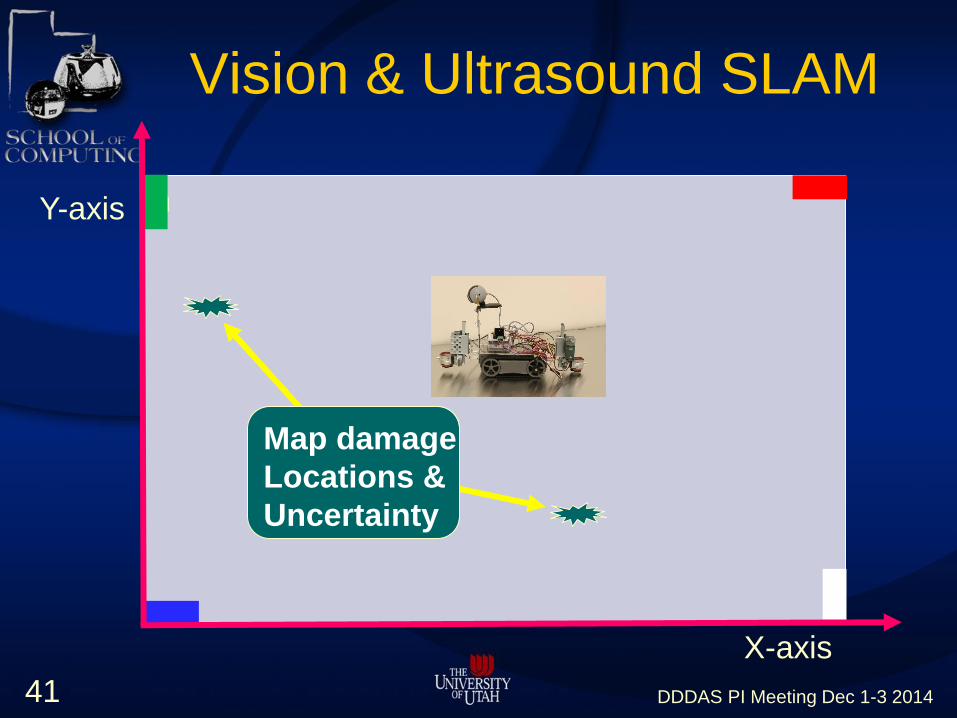
Vision & Ultrasound SLAM
DDDAS PI Meeting Dec 1-3 2014 41
h
X-axis
Y-axis
Map damage
Locations &
Uncertainty
Broader SHM Issues
• Update the wave propagation model (i.e.,
parameter calibration of physical properties)
• Perform optimal sensor placement (i.e.,
robot motion control)
• Store image and ultrasound data off-line
• Exploit other possible localization
possibilities (e.g., RSS from wireless)
• Use structure-based sensor/actuators
DDDAS PI Meeting Dec 1-3 2014 42
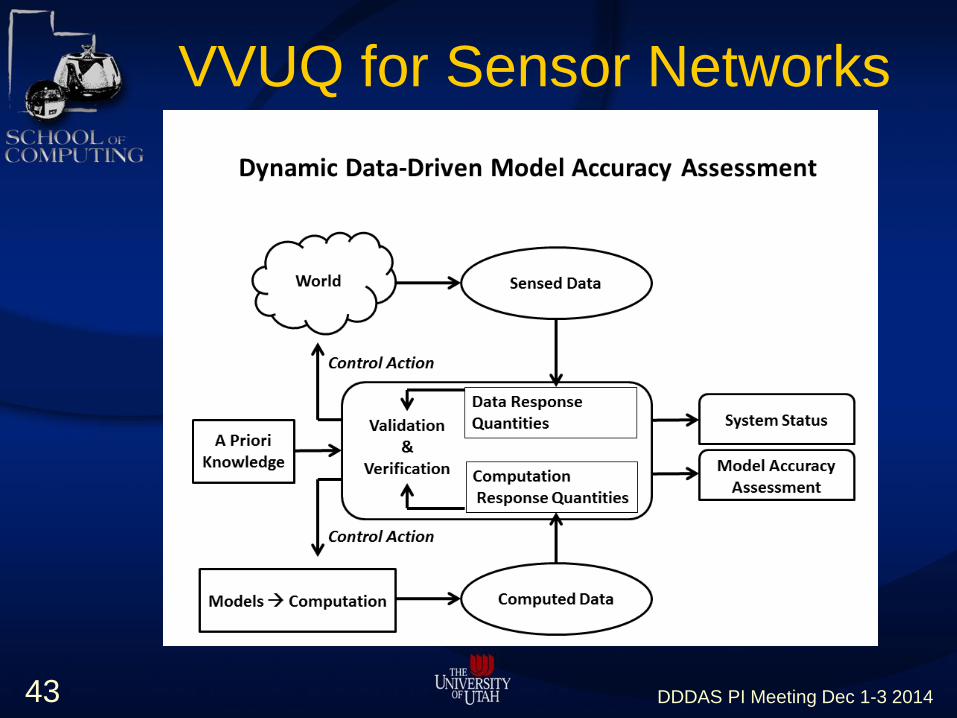
VVUQ for Sensor Networks
DDDAS PI Meeting Dec 1-3 2014 43
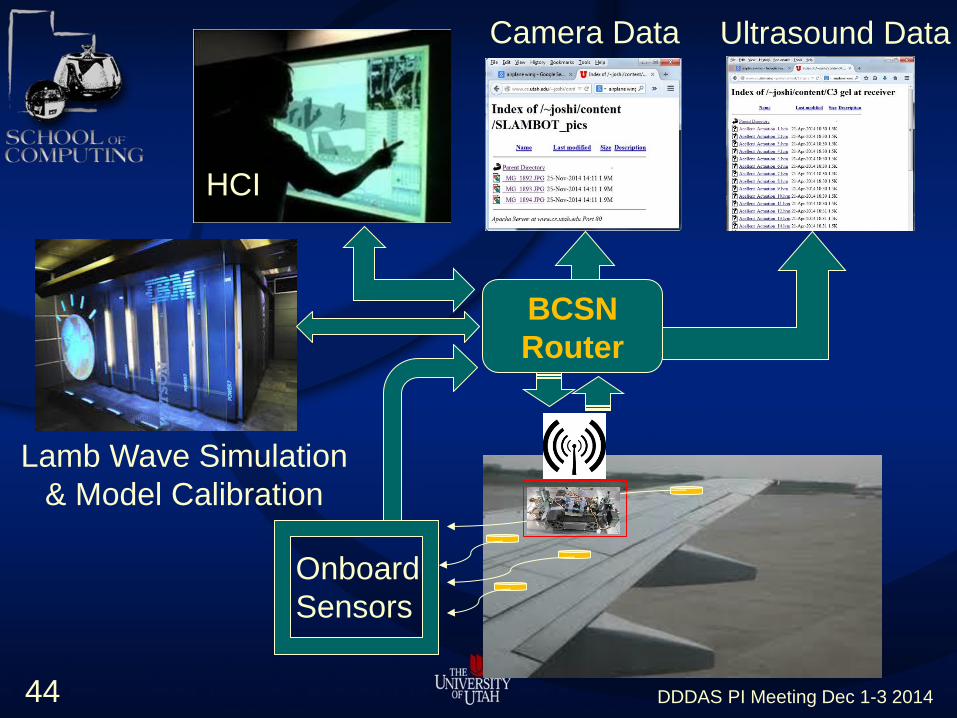
DDDAS PI Meeting Dec 1-3 2014 44
BCSN
Router
Ultrasound Data Camera Data
Onboard
Sensors
Lamb Wave Simulation
& Model Calibration
HCI
Data Routing Model
for Cloud Computing (developed with Nishith Tirpankar)
• Data sharing model
• Highly customizable
• Low latency between sensing and
computational resources
• Optimized socket applications
• Dynamic routing
DDDAS PI Meeting Dec 1-3 2014 45
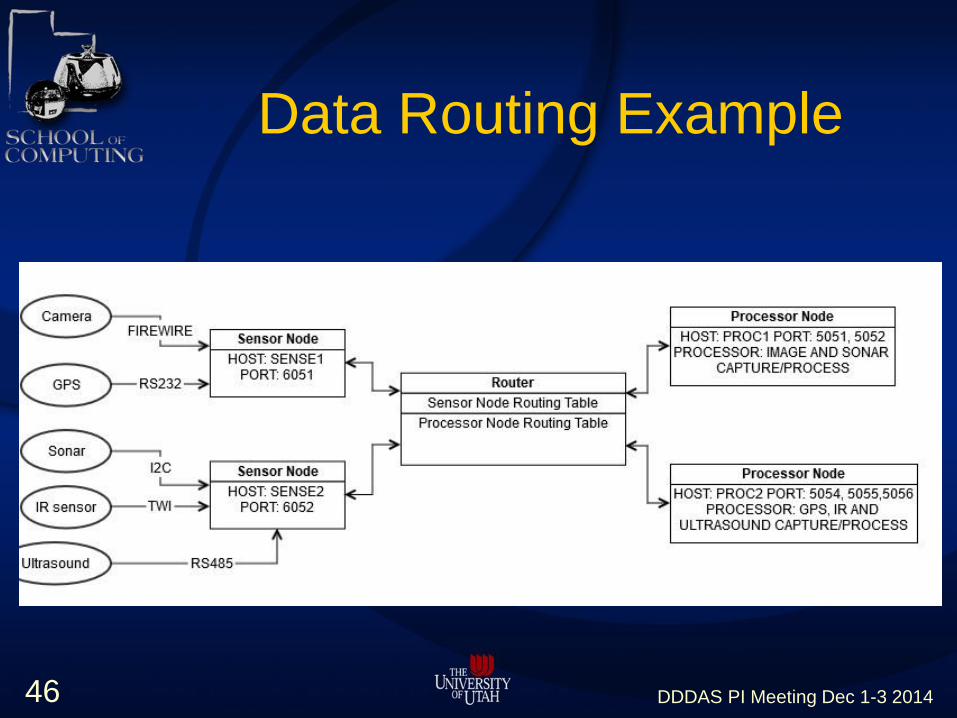
Data Routing Example
DDDAS PI Meeting Dec 1-3 2014 46
Sensor Nodes
• Sensors on individual devices communicate with network
connected sensor nodes over preferred sensor protocol
• E.g., GPS sensors can exchange data over I2C or RS-232(serial)
interconnects
• Sensor nodes are applications running on host devices that have
the capability of talking with the Router over socket connections
• Gather and serialize files, configuration and other data
• Must be registered in the Router tables
• Each data message (a single message can consist of multiple packets)
can be sent independently to any processor node.
• E.g., a single sensor node that accepts camera and GPS data can
send data to 2 different processor nodes.
DDDAS PI Meeting Dec 1-3 2014 47
Router
• Can be running on a remote machine responsible for mapping
the sensor data to the relevant processor.
• Refers to a routing table that tells it to listen on the relevant
sockets for sensor nodes
• Has a list of the processor node responsibilities. The incoming
message contains the processor type requested by the sensor
node.
• Since the router spawns new threads to handle the
communication channel between sensor and processor, the
connection is quick and reliable.
• The log data from the entire system can be collected in a single
location and analyzed if required.
DDDAS PI Meeting Dec 1-3 2014 48
Processor Node
• Application runs on a remote machine that has a
good computing capability.
• Generally handles singular responsibilities but can
also be used to consolidate data from multiple
sensors and take a decision based upon the
multiple data points.
• Can communicate on multiple sockets with each
socket having distinct responsibilities.
DDDAS PI Meeting Dec 1-3 2014 49
Decision Maker Support
• Argumentation System
• Bayesian Framework
• Make weaknesses of models and
uncertainties of results evident to
human
DDDAS PI Meeting Dec 1-3 2014 50
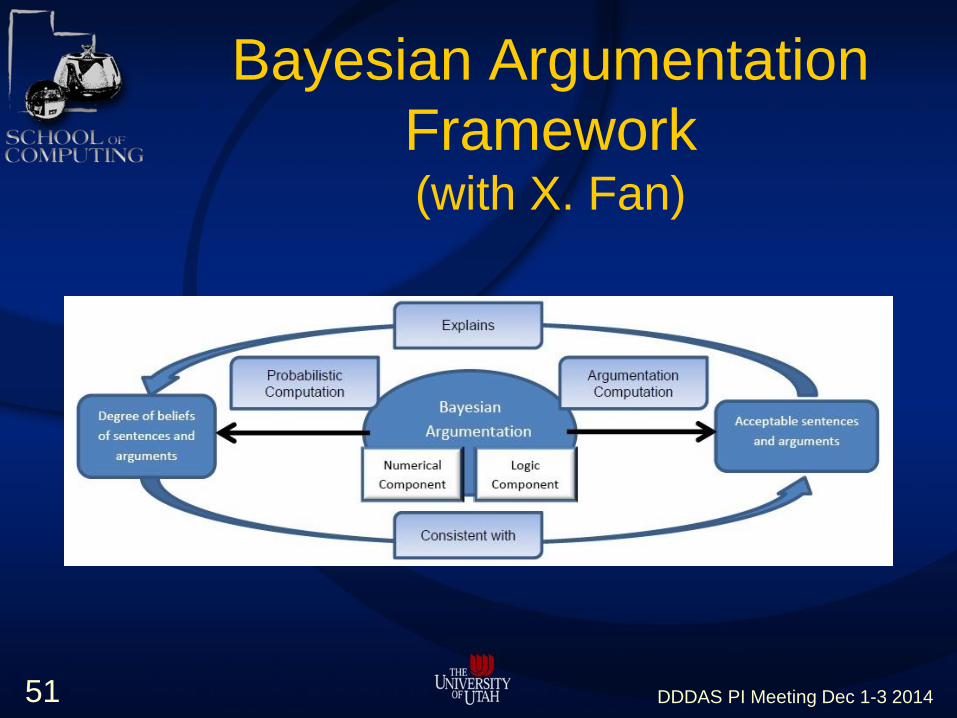
Bayesian Argumentation
Framework (with X. Fan)
DDDAS PI Meeting Dec 1-3 2014 51
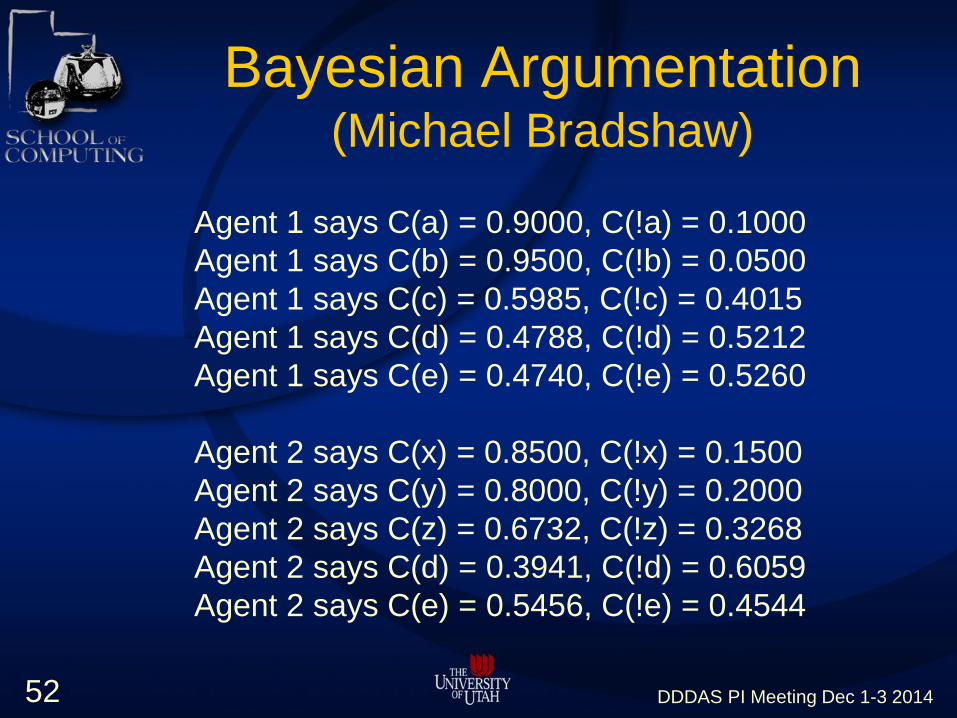
Bayesian Argumentation (Michael Bradshaw)
DDDAS PI Meeting Dec 1-3 2014 52
Agent 1 says C(a) = 0.9000, C(!a) = 0.1000
Agent 1 says C(b) = 0.9500, C(!b) = 0.0500
Agent 1 says C(c) = 0.5985, C(!c) = 0.4015
Agent 1 says C(d) = 0.4788, C(!d) = 0.5212
Agent 1 says C(e) = 0.4740, C(!e) = 0.5260
Agent 2 says C(x) = 0.8500, C(!x) = 0.1500
Agent 2 says C(y) = 0.8000, C(!y) = 0.2000
Agent 2 says C(z) = 0.6732, C(!z) = 0.3268
Agent 2 says C(d) = 0.3941, C(!d) = 0.6059
Agent 2 says C(e) = 0.5456, C(!e) = 0.4544
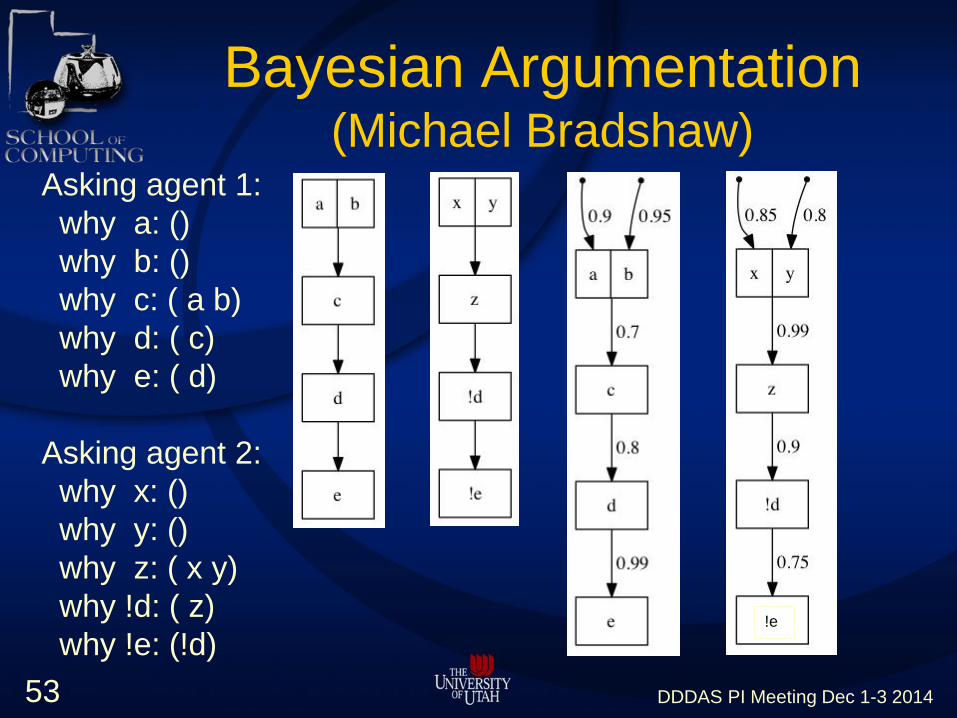
Bayesian Argumentation (Michael Bradshaw)
DDDAS PI Meeting Dec 1-3 2014 53
Asking agent 1:
why a: ()
why b: ()
why c: ( a b)
why d: ( c)
why e: ( d)
Asking agent 2:
why x: ()
why y: ()
why z: ( x y)
why !d: ( z)
why !e: (!d) !e
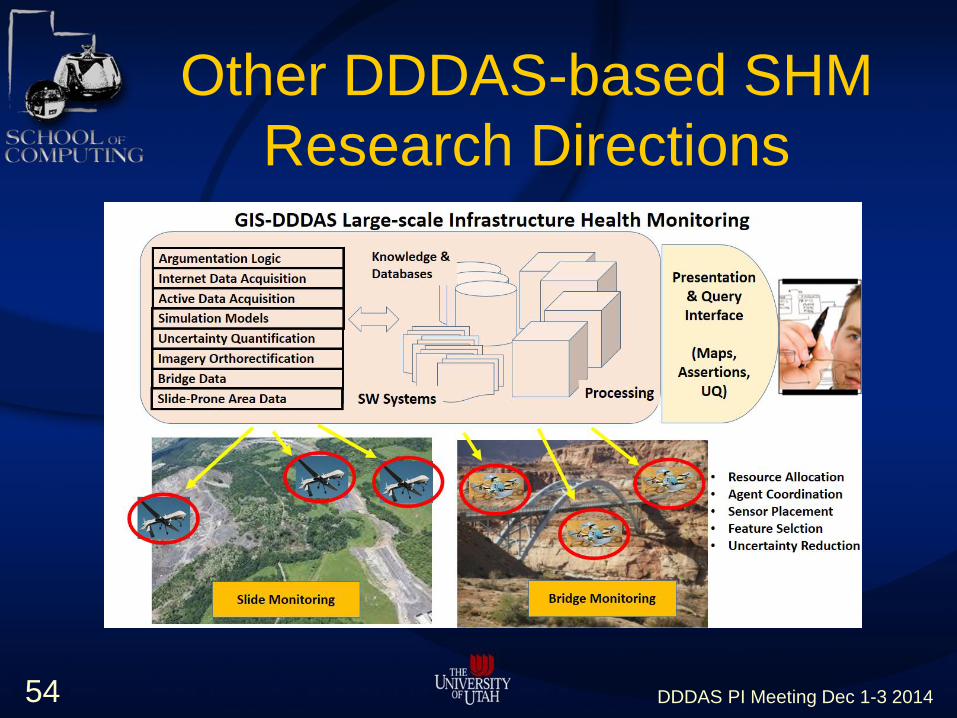
Other DDDAS-based SHM
Research Directions
DDDAS PI Meeting Dec 1-3 2014 54
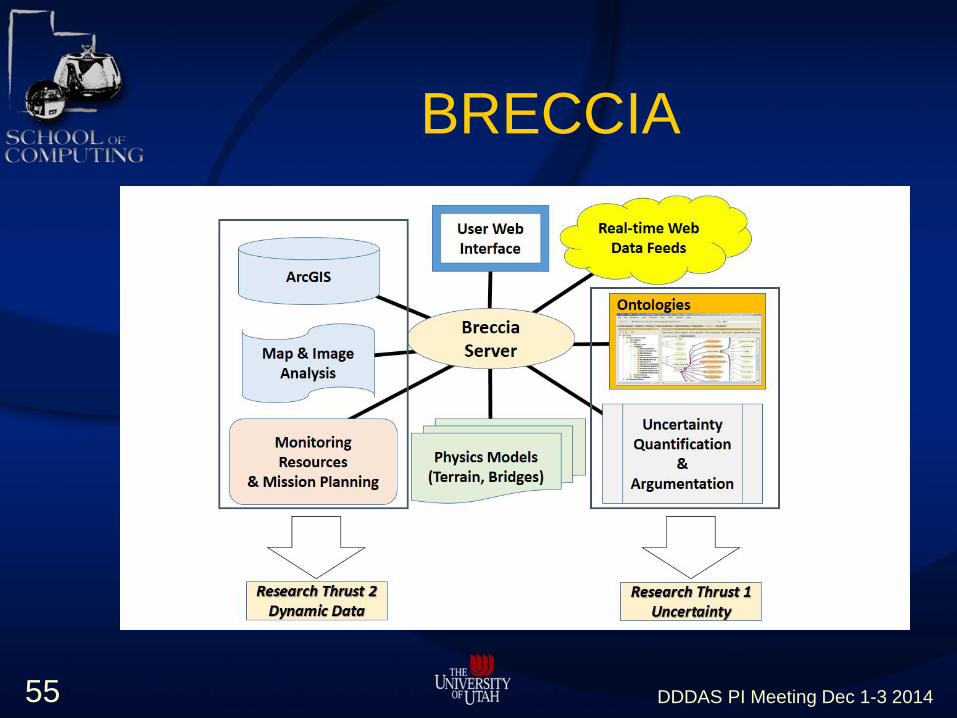
BRECCIA
DDDAS PI Meeting Dec 1-3 2014 55

IEEE
MFI 2015
San Diego
DDDAS PI Meeting Dec 1-3 2014 56
Special Session: DDDAS
Keynote Speaker:
Frederica Darema
Questions?
DDDAS PI Meeting Dec 1-3 2014 57
Sensor
• VS900-RIC Sensor: 100-900 kHz,
ceramic face, integrated
preamplifier (34 dB gain)
Acoustic Technology Group, Inc
DDDAS PI Meeting Dec 1-3 2014 58