-
FP7 ICT-SOCRATES
X-Map Estimation
Michaela Neuland, TUBS Mehdi Amirijoo, Ericsson
-
WWW.FP7-SOCRATES.EU
Outline
Introduction Study overview Current status Challenges
2/15
-
WWW.FP7-SOCRATES.EU
Drive Tests
Primary objectives of drive testing is to identify network
performance using a reasonable sample of locations in the
network
Identify performance in terms of, e.g., Coverage (e.g., pilot
power) Accessibility (e.g., random access) Retainability (e.g.,
hand over) Quality (e.g., throughput and speech quality)
Sampling carried out manually by drive/walk tests
Automation of drive tests has been proposed by NGMN due to
limitations in drive/walk testing
3/15
-
WWW.FP7-SOCRATES.EU
Drive Tests
Only a limited part of network can be analysed
Drive/walk test are costly
Drive tests only capture a snapshot of the conditions in the
field
4/15
-
WWW.FP7-SOCRATES.EU
X-map Estimation
Main principle: Connect UE event/measurements with estimated
position Gather UE reports to build map relating geo reference data
and metric of interest
A map can indicate, e.g. Path loss Interference
Used to detect, e.g. Coverage holes Service quality Traffic
density (used for e.g., site planning)
5/15
-
WWW.FP7-SOCRATES.EU
Study
Aim of study is not to develop positioning mechanisms Quite
siginificant work already done Not within the scope of network
management Positioning is being studied for LTE
We assume that UE positioning is in place
Model accuracy of UE positioning techniques as a function of RAT
radio environment number of measured cells etc.
Model accuracy of UE measurements (RSRP, PL etc.)
Use models to find map accuracy by means of simulations
6/15
-
WWW.FP7-SOCRATES.EU
Study Output
What is the map accuracy that can be obtained using todays and
tomorrows technology?
WCDMA positioning GPS LTE R8/R10
Understand map accuracy as a function of: UE positioning
accuracy UE measurement accuracy Number of measurements taken
Are there other ways of improving accuracy? Can UE measurements
be combined with prediction data to obtain better
accuracy? Can we combine several sources from different RATs,
GPS, prediction data?
7/15
-
WWW.FP7-SOCRATES.EU
Study Output
What is the positioning and measurement accuracy needed to
obtain maps with sufficient accuracy?
Determine requirements on, e.g. UEs and positioning mechanisms
Determine feasibility of map generation
Impact on interfaces, e.g., UE-eNodeB, X2
Impact on UEs
Appropriate triggering of measurement reports Identification of
time + locations in the network
8/15
-
WWW.FP7-SOCRATES.EU
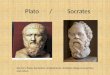
Small realistic scenario of 1.5 km x 1.5 km in Braunschweig
Static and mobile users based on a mobility model
Network information available
Realistic path loss information derived from a prediction
model
Decorated user snapshots
Simulation Scenario
Source: Google Earth 5.0
9/15
-
WWW.FP7-SOCRATES.EU
For LTE three different localisation methods are planned GPS
Observed Time Difference of Arrival (OTDOA) Enhanced cell ID
positioning method
Model for the position error based on the Cramr-Rao lower bound
found in the literature
This model is based on the Geometry of eNodeBs / satellites and
the UE Number of measured signals Standard deviation of the
measurement error
(for GPS: 33.3 ns)
Position Error Modelling
10/15
-
WWW.FP7-SOCRATES.EU
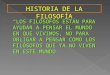
At the moment successive positions are uncorrelated Next step:
applying some kind of filter to get a "flat" route
Position Error Modelling - GPS
11/15
-
WWW.FP7-SOCRATES.EU
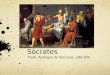
mean error: 7.4 m standard deviation: 4.9 m
Position Error Modelling - GPS
position error in m
dist
ribut
ion
func
tion
12/15
-
WWW.FP7-SOCRATES.EU
How can we find realistic values for the achievable position
accuracy and reliability?
Can we improve the position error modelling?
What are the error sources for localisation methods and how can
we consider them?
Can we benefit from combining different localisation
methods?
Challenges
13/15