Embed Size (px)
Citation preview

ATTITUDE CONTROLLER DESIGN FOR SPINNING SOLAR SAIL USING ANALYTICAL FIRST-ORDER OSCILLATION MODEL AND
NUMERICAL MULTI-PARTICLE MODEL
Osamu Mori (1), Ryu Funase (1), Yuichi Tsuda (1) (1) JAXA Space Exploration Center, 3-1-1 Yoshinodai, Sagamihara, Kanagawa, Japan 229-8510,
+81-(0)42-759-8747, [email protected] +81-(0)42-759-8746, [email protected] +81-(0)42-759-8625, [email protected] ABSTRACT In this paper, the attitude motion and attitude control strategy of spinning solar sail are discussed. As the spinning type solar sail does not have any rigid structure to support its membrane, the impulsive torque by the RCS can introduce oscillatory motion of the membrane. Thus, an “oscillation free” attitude controller is needed, which takes into account the flexibility of the membrane and avoid unnecessary oscillatory motion. First, the dynamics model and numerical model were introduced, and the validity of these models and dominant out-of-plane membrane vibration mode is examined by membrane vibration experiment and comparison between both models. Then, based on the analysis of the dynamics of torque-free motion, it was shown that a spinning solar sail has three oscillation modes of nutation, one of which is equal to the spinning rate of the spacecraft. The dominancy of each nutation mode was analytically and numerically discussed. Then, we discussed the spin axis maneuver control using conventional RCS. It was analytically shown that continual impulsive torque synchronizing the spin rate can excite nutation velocity and that a controller is needed to damp the nutation while controlling the spin axis at the same time. The authors proposed new controller named Flex-RLC and improved one. Their effectiveness was verified by numerical simulations using precise multi-particle numerical model which can express higher order oscillatory motion of the flexible membrane, and it was found that the proposed method can control the attitude of spinning solar sail while drastically reduces the nutation velocity compared with conventional control logic. So, it can be said that the proposed method is promising fast and stable controller for spinning solar sail. 1. INTRODUCTION The Japan Aerospace Exploration Agency (JAXA) has been studying the “solar sail” propulsion system as a promising way of orbital control for future deep space explorations. An interplanetary solar sail mission is being planned by JAXA in 2010s. The mission is to demonstrate the solar sailing technology and other various technologies required for future interplanetary explorations. A spinning type solar sail has been proposed for the mission, where the sail equipped around the spacecraft hub is to be deployed and extended by centrifugal force. This type of mechanism has the advantage in its simple and lightweight structure. As to the development of the spinning solar sail, the mechanism to deploy huge and flexible membrane has been extensively investigated by ground experiments or experiments using balloons and sounding rockets [1,2]. However, the attitude control system of the solar sail, which controls the direction of the sail and the spacecraft, has not been much studied, although this is necessary for the control of solar radiation propulsive force by the sail. Several methods of attitude control for solar sail have been proposed so far, such as the heliogyro or the control vanes, but most of them require some kind of mechanical structure which is not verified for long-term interplanetary mission over years. Alternatively, this paper introduces a control method which uses conventional reaction control system (RCS) equipped on the center spacecraft hub. Here, the reaction control device is conventional chemical jet propulsion system. As the spinning type solar sail does not have any rigid structure to support its membrane, the impulsive

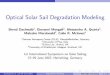
torque by RCS can introduce oscillatory motion of the membrane. Thus, an oscillation free attitude controller is needed to take into account the flexibility of the membrane. This paper first introduces two dynamics model of spinning solar sail in Section 2. The first one is a simplified analytical model which is to be used for the controller design. The other one is a precise numerical model incorporating the flexibility of the membrane and is to be used for performance verification of the controller. In section 3, constructed analytical model and numerical model are verified by comparing both models in membrane vibration experiments to show that the constructed models can express the vibration of the membrane. In section 4, several attitude controllers are designed using the analytical model. In designing the attitude control system, flexibility of the large membrane is taken into consideration. The performance of the controllers is verified by numerical simulations using the precise numerical model. Finally, conclusions are given in Section 5. 2. DYNAMICS MODEL OF SPINNING SOLAR SAIL This section introduces two dynamics model of spinning solar sail. The first one is a simplified analytical model (section 2.1) and the other one is a precise numerical model incorporating the flexibility of the membrane (section 2.2). 2.1 Analytical dynamics model considering first mode of oscillation In this section, an analytical dynamics model of the sail is derived considering first mode of oscillation of the membrane. Here we consider circular spinning solar sail configuration shown in Fig. 1. The spinning solar sail consists of a center spacecraft hub and a large membrane connected with the hub, which rotate around the Z-axis at a rate of Ω. In this research, we adopted the dynamic model considering the first mode of membrane oscillation proposed by Nakano, et al [3]. The conservation laws of angular momentum and the equations of motion are as follows. 2
2 1 1( ) 0y xI I Iφ φ ω ω+ Ω + Ω + =&& & (1)
22 1 1( ) 0x yI I Iψ ψ ω ω+ Ω + −Ω + =&& & (2)
22
1( ) ( ) 02x yI J I Iω ω φ φ+ − Ω + + Ω =&&& (3)
22
1( ) ( ) 02y xI J I Iω ω ψ ψ− − Ω + + Ω =& && (4)
where
I1: moment of inertia (MOI) of membrane Ix: MOI of center spacecraft around X, Y-axis Iz: MOI of center spacecraft around Z-axis I: MOI of overall spacecraft around X, Y-axis (=Ix+I1/2) J: MOI of overall spacecraft around Z-axis (=Iz+I1) ωx, ωy, Ω: angular velocity around three axes
and I2 is defined as
22 2 ( )b
a
r
arI h r r r drπρ= −∫ (5)
where
ρ: density of membrane [kg/m3] h: thickness of membrane [m] ra: inner radius of membrane [m]

rb: outer radius of membrane [m]
For the condition of numerical simulation, we adopt a value 1.4g/cm3 for ρ and 7.5x10-6m for h, referring to the typical polyimide film. φ and ψ constitutes the first-order mode of the out-of-plane membrane deformation w as follows. ( , , ) ( ) ( )sin ( ) ( ) cosa aw r t r r t r r tθ φ θ ψ θ= − − − (6) where θ corresponds to the phase of the spin motion of the center spacecraft hub.
ZB
ZI
YB
XB
XI
YI
Ω Fig. 1. Configuration of solar sail spacecraft
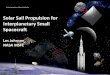
2.2 Multi particle model When a numerical modeling method which can analyze the dynamics of spinning solar sail considering the thin membrane is required, the useful model includes Finite Element Method (FEM). However, when the FEM is applied for the analysis of the dynamics of solar sail, it is thought that it takes huge time to achieve the valuable information about the attitude motion of solar sail if a lot of parameters are varied. So, Multi Particle Model (MPM) is used for the numerical model in this study [4]. The characteristics of MPM are that it takes less time for dynamics simulation and can perform more stable analysis than FEM because MPM is a model which substitutes the elements of membrane for particles connected by springs. The configuration of particles we adopted is shown in Fig. 2. Fig. 2(a) shows the layout of mass, dampers, and springs in MPM. As Fig. 2(a), the springs which express the inplane shaft stiffness and inplane shear stiffness are arranged in MPM in this study. The springs which express the out-of-plane stiffness are not arranged because it is assumed that the influence by out-of plane stiffness is minute due to the thinness of the membrane. The circular membrane is approximated by decagon that is constructed by 200 mass points. The membrane is connected to the center spacecraft hub with 10 tethers. The parameters used in the model are shown in Table 1, which are calculated based on [5], assuming typical polyimide film. Unless otherwise stated, these parameters are used in this paper.
(a) Configuration of MPM (b) Modeling of solar sail by MPM Fig. 2. Multi particle model by MPM

Table 1. Parameters of MPM (Parameters of membrane)
Item Value Shape of membrane decagon Spring constant of membrane (longer element) 4804.7N/m(shorter element) 129.8N/mSpring constant of tether 50000N/mDamping factor of membrane 0.01 Damping factor of tether 0 Number of mass points 200 Inner radius of membrane 1.0m Outer radius of membrane 7.0m I2/I1 1.11 I1 164.9kgm2
(Parameters of center spacecraft hub) Item Value
Ix, Iy 50kgm2 Iz 80kgm2 Radius 0.75m
3. VERIFICATION OF THE MODELS There are a lot of advantages to use MPM for the analysis of spinning solar sail, but it is undeniable that MPM uses the bold approximation. In addition, few researches using MPM which study the dynamic motion of deformation of the thin film by comparison with dynamic experiment are reported, however some researches using MPM which study the static deformation of a thin film which is subject to the deformation force are reported [6,7]. So, the validation of the applicability of MPM for the dynamic motion of thin film by comparison with dynamic experiment is beneficial. In this section, the validity of MPM which can express the oscillation of membrane is shown by comparing the membrane vibration experiments and numerical simulation using MPM. In addition, the dominant vibration mode of membrane of solar sail is explained by comparing the analytical model and MPM. 3.1 Membrane vibration experiments in vacuum chamber To show the validity of MPM which can express the oscillation of membrane, the membrane vibration experiments are performed in vacuum chamber. A brief overview of experimental setup is shown is Fig. 3. This experimental setup substitutes the centrifugal force for gravity force. Using this motor, membrane of 7.5μm polyimide which is considered as the membrane material of solar sail is oscillated in out-of-plane direction. Two video cameras are used for measurement of the displacement of measure points 1-3. In this study, out-of-plane displacements of each measure point of fundamental and second vibration mode are compared with numerical simulation results using the same configuration numerical model constructed by MPM. The experimental conditions are shown in Table 2. In this configuration, the membrane natural frequency of fundamental and second vibration mode is calculated as each 9.1Hz and 2.05Hz by numerical simulation, but in these experiments, experimental frequency is shifted from the resonance frequency to preferably reduce the damping effects. Figs. 4 and 5 show the results of membrane vibration experiment and numerical result of MPM in the fundamental vibration mode. In addition, Figs. 6 and 7 show the results of membrane vibration experiment and numerical result of MPM in the second vibration mode, and Fig. 8 shows the comparison between experimental out-of-plane displacement at measure points 1 and 3 in second vibration mode. Focused on Fig.8, points 1 and 3 move in opposite phase. As this result, we can see the second vibration mode when the vibration frequency of motor is 1.8Hz. Furthermore, focused on Figs. 4-7, it seems that these results almost correspond with each other. As these result, it

becomes clear that MPM can explain not only the fundamental out-of-plane vibration mode of membrane, but also second vibration mode of it.
450mm
20mm
440mm
225mm
(a) Brief overview of membrane vibration experiment (b) Experimental setup Fig. 3. Experimental setup of membrane vibration experiment
Table 2. Parameters of membrane vibration experiments
(Parameters of membrane vibration experiment) Item Value
Degree of vacuum in vacuum chamber 0.7kPa Vibration frequency of motor (fundamental mode) 0.75Hz, sine Vibration frequency of motor (second mode) 1.8Hz, sine Angle amplitude of motor (fundamental mode) 7.0deg Angle amplitude of motor (second mode) 4.0deg
-0.008
-0.004
0
0.004
0.008
0 2 4 6 8 10 12 14
Time [sec]
Z [m
]
Numerical ResultExperimental Result
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 2 4 6 8 10 12 14
Time [sec]
Z [m
]
Numerical ResultExperimental Result
Fig. 4. Out-of-plane displacement at measure point 1 (fundamental mode)
Fig. 5. Out-of-plane displacement at measure point 3 (fundamental mode)
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0 2 4 6 8 10
Time [sec]
Z [m
]
Numerical ResultExperimental Result
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0.01
0 2 4 6 8 10
Time [sec]
Z [m
]
Numerical ResultExperimental Result
Fig. 6. Out-of-plane displacement at measure point 1 (second mode)
Fig. 7. Out-of-plane displacement at measure point 3 (second mode)

-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0 2 4 6 8 10
Time [sec]
Z [m
]
Point 1Point 3
Fig. 8. Comparison between experimental out-of-plane displacement at measure points 1 and 3
(second mode) 3.2 Comparison between analytical model and numerical model In the face of the membrane oscillation of solar sail, it can be thought that fundamental vibration mode is dominant because the rigidity of membrane increases due to the centrifugal force of membrane. In this section, dominant mode of membrane oscillation and the validity of both analytical and numerical models are discussed by comparison between both models. In this study, analytical model and numerical model are compared by comparison between the transfer function between the nutation and thruster torque. In the analytical model, if the thruster torque is applied to center spacecraft hub, the transfer function between the nutation and thruster torque can be described as Eq. 26 which is detailed in section 4. On the other hand, the transfer function of numerical model between the nutation and thruster torque can be derived using system identification. In this paper, system identification is performed by which it is assumed that the relationship of input (thruster torque) and output (nutation angular velocity) can be described as Auto-Regressive eXogeneous model (ARX model). When white noise is determined using ω(k) and discrete time is k, it is assumed that identification target is described as that the relation of input and output of
1
1
( ) ( 1) ( )
( 1) ( ) ( )a
b
n a
n b
y k a y k a y k n
b u k b u k n kω
+ − + + −
= − + + − +
L
L (7)
Following approximations are introduced 1
1( ) 1 a
a
nnA q a q a q−−= + + ⋅⋅⋅ + (8)
11( ) 1 b
b
nnB q b q b q−−= + + ⋅⋅⋅ + (9)
Then, Eq. 7 is described as ( ) ( ) ( ) ( ) ( )A q y k B q u k kω= + (10) A model which can be described like this is called ARX model. Using this model, the transfer function of numerical model can be derived. Fig. 9 shows the input and output used for the system identification. These values are numerical simulated by MPM. The input uses frequency sweep input because it contains various frequency components. Fig. 10 shows the comparison between the output by numerical simulation result of MPM and estimated output which uses transfer function derived by system identification. Focused on Fig. 10, the simulated output and estimated output almost correspond with each other. Therefore, it is clear that transfer function by system identification precisely express the relationship between the nutation and thruster torque calculated by MPM. Then, the constant terms which determine the transfer function of analytical model and numerical model are shown in Table 3. Focused on Table 3, each parameter is almost corresponds with each other. As these result, both models are quite similar model seen from the relationship between thruster torque and nutation angular velocity. And thus, because analytical model limits the membrane oscillation as only out-of-plane fundamental vibration occurs, it is shown that when the out-of-plane membrane oscillation of solar sail is discussed, fundamental vibration mode is dominant.

Fig. 9. Input (thruster torque) and output (nutation angular velocity) used
for system identification
Fig. 10. Comparison between simulated output and estimated output
Table 3. Constant terms of transfer function
Constant terms Analytical model Numerical model Ω2 100 98.6
βΩ2 129 124.8 B1
2Ω2 452 458.9 B2
2Ω2 1303 1248 4. SPIN AXIS MANEUVER WITH CONVENTIONAL REACTION CONTROL SYSTEM In this section, dynamical property of the solar sail is discussed (sections 4.1). Based on the results, several attitude controllers are designed in section 4.2. In section 4.3, performance of the controllers is verified by numerical simulations using MPM. 4.1 Dynamical property of the sail Here, we analyze the attitude dynamics of the solar sail. State equations of the system (Eqs. 1-4) can be described as the following equation.
d Adt
=x x (11)
Where
T
x yφ ψ φ ψ ω ω⎡ ⎤= ⎣ ⎦x & & (12)
1
2
1
2
2
1
2
1
2
2
2
2
0 0 0 0 ( 1)
0 0 0 ( 1) 0
1 0 0 0 0 00 1 0 0 0 00 0 ( 1) 0 0
0 0 0 ( 1) 0
IscI
IscI
IscI
IscI
N
N
A
N
N
β
β
β
β
⎡ ⎤− Ω − Ω⎢ ⎥
− Ω − − Ω⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥
− Ω − Ω⎢ ⎥⎢ ⎥− Ω Ω⎢ ⎥⎣ ⎦
(13)
2 x
IIβ ′= (14)
11 22 ( )xI I I I′ = + − (15)
1z
x
Isc IN = − (16)

It can be said that the dynamical property of the system is determined by the following three parameters which can be calculated by the moment of inertia of the center spacecraft hub and the membrane.
1
2
, , scI NI
β
The characteristic equation of the system can be derived as the following equation.
1
2
2 2 2 2
2 2 2 2
det( ) ( )
( ( ( 1)) )
0
Isc scI
sI A s s
N s N
β
β
− = + Ω
+Ω + Ω + −
=
(17)
Here, supposing that I1/I2 is close to 1.0, the characteristic equation is simplified to the following expression. This assumption is appropriate for the typical solar sail that have large membrane relative to a center hub.
2 2 4 2 2 2
2 4
det( ) ( ){ ( 2 1)
( 1) }0
sc
sc
sI A s s N s
N
β
β
− = + Ω + + − Ω
+ + − Ω
= (18)
Finally, it is found that the following three modes of oscillation constitute the nutation of the solar sail. 1 2, ,B BΩ Ω Ω (17) where
21 ( 1) 4( 1)2
1 2( 1) sc scN NscB N ββ + − + + −− = − − − (18)
21 ( 1) 4( 1)2
2 2( 1) sc scN NscB N ββ + + + + −− = − − − (19)
This means that the nutation angular velocity of the spacecraft has three oscillation modes as in Eq. 19. The numerical expression of B1 and B2 is illustrated in Figs. 11 and 12, where β and Nsc are independent parameters. For a practical range of β and Nsc, B1 is larger than 1 and B2 can be both larger and less than 1. Laplace transform of nutation angular velocity of the center spacecraft hub ωx(t) with respect to initial condition ωx(0) can be obtained from the state Eq. 11 and the amplitude of each oscillation mode is given by factorization to partial fraction of the Laplace transform, which is expressed as
2
2 2 2 21 2
2 21
2 2 2 2 2 21 1 2 1
2 22
2 2 2 2 2 22 2 1 2
( 1)(0) ( 1)( 1)
( )( 1)( )
( )( 1)( )
x
x
W sB B s
B sB B B s B
B sB B B s B
βω
β
β
−=
− − + Ω
−+
− − + Ω
−+
− − + Ω
(20)
The attitude motion of spinning spacecraft with large membrane has three modes of oscillation in contrast to the rigid spacecraft which has only one mode of nutation motion. In particular, there exists a mode equivalent to the spin rate of the spacecraft, which represents the relative motion of membrane itself. By numerically evaluating the amplitude of each oscillation mode, mode B1Ω is always smaller than the other two modes, and the relation of the magnitude of Ω mode and B2Ω mode depends on β and Nsc. β is a parameter that expresses the mass property of the sail relative to the center spacecraft. If β is extremely small, for example its theoretical minimum value 1, nutation frequency becomes that of rigid spacecraft. In this case, β is 1 and then B2 becomes equal to Nsc. So the dominant nutation mode will be B2Ω (= Nsc Ω; nutation mode of rigid spacecraft). On the other hand, if β is large, that is, the sail is extremely large or heavy, the nutation motion of the center spacecraft hub becomes equal to the spin rate Ω, so in this case Ω mode will be dominant. Fig. 13 shows the ratio

of the amplitude of each oscillation mode and the area where each oscillation mode is dominant compared with the other mode. Fig. 14 shows an example of comparison between above analysis and the numerical simulation results using MPM, where β is 1.23 and Nsc is 0.60. In this configuration, B2Ω mode is dominant (see Fig. 12) and analytical model and MPM agrees very well with each other.
1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
beta
1.2
1.2
1.2
1.4
1.4
1.4
1.6
1.6
1.6
1.8
1.8
1.8
2
2
22.
2
β1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
beta
1.2
1.2
1.2
1.4
1.4
1.4
1.6
1.6
1.6
1.8
1.8
1.8
2
2
22.
2
β 1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
beta
0.2
0.4 0.6
0.6
0.8
0.8
0.8
1
1
11.2
1.2
1.2
1.4
1.4
1.4
1.6
1.6
1.8
β1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
beta
0.2
0.4 0.6
0.6
0.8
0.8
0.8
1
1
11.2
1.2
1.2
1.4
1.4
1.4
1.6
1.6
1.8
β
Fig. 11. Value B1 for β and Nsc Fig. 12. Value B2 for β and Nsc
Ampl.(Ω) / Ampl.(B2Ω)
Nsc
1
βLargeMembrane
SmallMembrane
Ω mode is dominant
Β2Ω mode is dominant
410
-0.00020
-0.00015
-0.00010
-0.00005
0.00000
0.00005
0.00010
0.00015
0.00020
0 2 4 6 8 10 12
Time [s]
Nuta
tion
velo
city
[ra
d/s]
MPM analytical model B2Omega mode (analytical model)
Fig. 13. Dominant oscillation mode with respect to β and Nsc
Fig. 14. Comparison between mathematical model and numerical simulation
4.2 Controller design The most important operation regarding attitude control of a solar sail is the spin axis maneuver, which is required for the control of solar radiation propulsive force by the sail. For attitude control device, we suppose the use of typical Reaction Control System (RCS). First, we investigate the motion when external torque is applied on the center spacecraft in order to maintain or change the attitude. When torque ux is applied, the transfer function is given by

( )( )2 2
2 2 2 2 2 21 2
21
2 2 2 2 22 1 1
22
2 2 2 2 21 2 2
x
x
W sU s B s B
B sB B s B
B sB B s B
β
β
β
+ Ω=
+ Ω + Ω
−=
− + Ω
−+
− + Ω
(21)
According to numerical evaluation, the amplitude of B2Ω mode is dominant compared with that of B1Ω mode. Fig. 15 shows an example of numerical simulation when external torque is applied at t=4.0s. At first the mode Ω is dominant, and after the external torque is applied, the mode B2Ω becomes larger. In addition, we can conclude from the transfer function that the RCS system mounted on the spacecraft hub is almost unable to decrease the rotating motion at the rate of Ω and it should be considered to adopt some damper to reduce the oscillation of mode Ω. Impulsive control input excites B2Ω nutation mode. In order to control the spin axis direction in the inertial frame, impulsive torque should be periodically applied synchronizing with the spin rate Ω, so that the direction of total angular momentum gradually tilted towards the target direction. If B2Ω is close to Ω (this situation can possibly happen), the impulse timing and nutation motion can synchronize and the controller can continually excite the nutation. Therefore, the controller is needed that does not excite nutation and also actively damps it in order to keep suppressing the nutation as much as possible. Spin axis direction of conventional spinning rigid spacecraft is generally controlled by Rhumb Line Controller (RLC). However, applying RLC to spinning spacecraft with large membrane requires consideration into the disturbance of the flexible membrane. As an efficient controller, the authors have developed a control logic “Flex-RLC” for spinning solar sail which can control the spin axis while damping the nutation. Flex-RLC is a logic in which the impulsive torque around X-axis is applied when the sign of angular velocity about the X-axis is negative [8]. The upper part of Fig. 16 illustrates the control logic. As is imagined from the governing equations, applying the torque at that situation enables more stable reorientation of a spacecraft compared with simple RLC. In this paper, we newly propose an improved version of Flex-RLC logic. In contrast to the conventional Flex-RLC logic where the duration of the applied impulsive torque is constant, the improved method adopts time-variant duration to enable faster and more stable attitude control. When B2Ω mode is assumed to be dominant, the Laplace transform of nutation angular velocity is calculated as the following equation.
2 22
2 2 2 2 2 22 1 2 2
22
2 2 2 2 21 2 2
2 22
2 2 2 2 2 22 1 2 2
( )( ) ( )( )( 1)
( ) ( )( )( 1)
x x
x
y
B sW T t TB B B s B
B s UB B s B
B TB B B s B
β ω
β
β ω
−+ Δ =
− − + Ω
−+
− + Ω
− Ω+
− − + Ω
(22)
where Δt is the duration of the thruster impulse. The inverse Laplace transform is given by
2 22 2
22 2 22 1 2
2 22
22 2 22 1 2
( )( ) ( ) cos( ) 1
( ) ( )sin( )( 1)
x x x
y
B BT t T U B tB B B
B T B tB B B
β βω ω
β ω
⎛ ⎞− −+ Δ = − ΩΔ⎜ ⎟− −⎝ ⎠
−+ ΩΔ
− −
(25)
The second term is negligible under the condition where Δt << 1, and then the optimal angular impulse that makes the nutation angular velocity zero can be calculated as the following equation.
22
21 ( )Bx xBU Tβ ω−
−= − (26)

angu
lar v
eloc
ity [r
ad/s
]
Flex-RLC
RLC
Fig. 15. Time response when external torque is applied
Fig. 16. Control logic of Flex-RLC (upper) and improved Flex-RLC (lower)
4.3 Simulation results and discussions Figs. 17-22 are the results of numerical simulation of each control logic where nutation velocity and precession angle of the Z-axis of the center spacecraft hub are described. The spin rate of the spacecraft was 2.5rpm and the torque generated by the thruster was 0.05Nm. It is assumed that the center spacecraft hub and the membrane are initially spinning at the same spin rate and no deformation of the membrane exists. These figures show that the nutation velocity initially increases for all control logics but quickly decreases for Flex-RLC method and improved Flex-RLC method, and the nutation level keeps the same level until the control goal is achieved. On the other hand, the conventional RLC logic shows much larger nutation velocity and spin axis precession angle. In some other cases, Flex-RLC or improved Flex-RLC could change the spin axis smoothly while the simple RLC method caused the divergence of nutation motion. As to the control speed, conventional Flex-RLC requires longer time than simple RLC. This is because Flex-RLC does not necessarily apply control torque for every spin while simple RLC blindly utilizes every chance of control input. Compared with conventional Flex-RLC, the proposed improved Flex-RLC can achieve the control goal in shorter time, and it also shows comparable performance in the control time compared with simple RLC. Therefore, it can be said that the improved Flex-RLC can achieve fast control while suppressing nutation motion at the same time. Focused on Figs. 20-22, even when Flex-RLC and improved Flex-RLC are applied for attitude maneuver, it found that long-term spin axis oscillation remains. This phenomenon is undesirable for attitude motion of spinning solar sail, so, this phenomenon is considered here. Figs. 23-31 shows the angular velocity of X-axis, Fast Fourier Transformation (FFT) results of angular velocity of X-axis, angle of Z-axis, and FFT results of angle of Z-axis when Flex-RLC is applied for spin axis maneuver. Each condition is that the spin rate of solar sail is 10rpm and thruster torque is 0.5Nm (condition 1), and the spin rate of solar sail is 10rpm and thruster torque is 0.05Nm (condition 2), and the spin rate of solar sail is 1.0rpm and thruster torque is 0.5Nm (condition 3). Focused on the angular velocity of X-axis (Figs. 23, 27, 31) and FFT results of angular velocity of X-axis (Figs. 24, 28, 32), it is found that two nutation mode is excited. These modes are correspond with the Ω and B2Ω which were derived by Eq. 19. This result means that the analytically derived nutation mode can be expressed by MPM. Also, focused on the angle of Z-axis (Figs. 25 and 29) and FFT results of angle of Z-axis (Figs. 26 and 30) under condition 1 and 2, if the amplitude of nutation become large, the amplitude of the long-term spin axis oscillation become large, however their frequency are not varied. In addition, focused on the angle of Z-axis (Figs. 25 and 33) and FFT results of angle of Z-axis (Figs. 26 and 34) under condition 1 and 3, it is found that the frequency of the long-term spin axis oscillation under condition 1 is smaller than that in

condition 3. For all of these reasons, it is found that if the thruster torque is large and nutation is excited, the amplitude if the long-term spin axis oscillation becomes large. In other words, the amplitude if the long-term spin axis oscillation depends on the amplitude of the nutation. In addition, it is shown that the frequency of the long-term spin axis oscillation depends on the spin rate of solar sail. So, in the case that a stable attitude control is required, a slow attitude maneuver using low torque thruster is needed.
0 200 400 600 800 1000
-0.004
-0.002
0
0.002
0.004
Time [s]Ang
ular
Vel
ocity
abo
ut th
e A
-axi
s [ra
d/s]
0 1000 2000 30000
0.5
1
1.5
2 Angle of Z-axis Angle of Angular Momentum Vector
Time [s]
Ang
le [d
eg]
Fig. 17. Angular velocity (RLC) Fig. 18. Angular momentum direction and oscillation of spin axis direction (RLC)
0 200 400 600 800 1000
-0.004
-0.002
0
0.002
0.004
Time [s]Ang
ular
Vel
ocity
abo
ut th
e A
-axi
s [ra
d/s]
0 1000 2000 30000
0.5
1
1.5
2 Angle of Z-axis Angle of Angular Momentum Vector
Time [s]
Ang
le [d
eg]
Fig. 19. Angular velocity (Flex-RLC) Fig. 20. Angular momentum direction and oscillation of spin axis direction (Flex-RLC)
0 200 400 600 800 1000
-0.004
-0.002
0
0.002
0.004
Time [s]Ang
ular
Vel
ocity
abo
ut th
e A
-axi
s [ra
d/s]
0 1000 2000 30000
0.5
1
1.5
2 Angle of Z-axis Angle of Angular Momentum Vector
Time [s]
Ang
le [d
eg]
Fig. 21. Angular velocity (improved Flex-RLC)
Fig. 22. Angular momentum direction and oscillation of spin axis direction
(improved Flex-RLC)

-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0 1000 2000 3000 4000Time [sec]
Ang
ular
Vel
ocity
[rad
/sec
]
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 23. Angular velocity (10rpm, thruster torque: 0.5Nm)
Fig. 24. FFT result of angular velocity (10rpm, thruster torque: 0.5Nm)
0
0.4
0.8
1.2
1.6
2
0 1000 2000 3000 4000
Time [sec]
Ang
le [d
eg]
Angle of Z-Axis
Angle of Angular Momentum Vector
0
2
4
6
8
10
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 25. Attitude angle of Z-axis (10rpm, thruster torque: 0.5Nm)
Fig. 26. FFT result of attitude angle (10rpm, thruster torque: 0.5Nm)
-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0 1000 2000 3000 4000Time [sec]
Ang
ular
Vel
ocity
[rad
/sec
]
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 27. Angular velocity
(10rpm, thruster torque : 0.05Nm) Fig. 28. FFT result of angular velocity
(10rpm, thruster torque : 0.05Nm)
0
0.4
0.8
1.2
1.6
2
0 1000 2000 3000 4000
Time [sec]
Ang
le [d
eg]
Angle of Z-Axis
Angle of Angular Momentum Vector
0
2
4
6
8
10
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 29. Attitude angle of Z-axis
(10rpm, thruster torque: 0.05Nm) Fig. 30. FFT result of attitude angle (10rpm, thruster torque: 0.05Nm)

-0.0015
-0.001
-0.0005
0
0.0005
0.001
0.0015
0 1000 2000 3000
Time [sec]
Ang
ular
Vel
ocity
[rad
/sec
]
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 31. Angular velocity
(1.0rpm, thruster torque: 0.5Nm) Fig. 32. FFT result of angular velocity
(1.0rpm, thruster torque: 0.5Nm)
0
0.4
0.8
1.2
1.6
2
0 500 1000 1500 2000 2500 3000 3500Time [sec]
Ang
le [d
eg]
Angle of Z-axisAngle of Angular Momentum Vector
0
20
40
60
80
100
0 0.2 0.4 0.6 0.8 1Frequency [Hz]
Am
p.
Fig. 33. Attitude angle of Z-axis (1.0rpm, thruster torque: 0.5Nm)
Fig. 34. FFT result of attitude angle (1.0rpm, thruster torque: 0.5Nm)
5. CONCLUSION In this paper, the attitude motion and attitude control strategy of spinning solar sail are discussed. As the spinning type solar sail does not have any rigid structure to support its membrane, the impulsive torque by the RCS can introduce oscillatory motion of the membrane. Thus, an “oscillation free” attitude controller is needed, which takes into account the flexibility of the membrane and avoid unnecessary oscillatory motion. First, the dynamics model and numerical model were introduced, and the validity of these models and dominant out-of-plane membrane vibration mode is examined by membrane vibration experiment and comparison between both models. Then, based on the analysis of the dynamics of torque-free motion, it was shown that a spinning solar sail has three oscillation modes of nutation, one of which is equal to the spinning rate of the spacecraft. The dominancy of each nutation mode was analytically and numerically discussed. Then, we discussed the spin axis maneuver control using conventional RCS. It was analytically shown that continual impulsive torque synchronizing the spin rate can excite nutation velocity and that a controller is needed to damp the nutation while controlling the spin axis at the same time. The authors proposed new controller named Flex-RLC and the improved one. Their effectiveness was verified by numerical simulations using precise multi-particle numerical model which can express higher order oscillatory motion of the flexible membrane, and it was found that the proposed method can control the attitude of spinning solar sail while drastically reduces the nutation velocity compared with conventional control logic. In addition, it was shown that the long-term spin axis oscillation which is occurred while attitude maneuver is performed is caused by the nutation motion, and its amplitude and frequency depend on the amplitude of the nutation and the spin rate of solar sail. According to above consideration, it is shown that if the amplitude of the nutation becomes smaller, the long-term spin axis oscillation becomes smaller. So, it can be said that the proposed method is promising fast and stable controller for spinning solar sail. In this paper, the phenomenon

and its solution approach of the long-term spin axis oscillation were discussed qualitatively, but the relationship between the nutation and that phenomenon has to be considered quantitatively for future work. 6. REFERENCES [1] Mori, O., Nishimaki, S., Matsumoto, M. et al.: Asymmetric Deployment Dynamics of Large Membrane, Proceedings of 16th JAXA Workshop on Astrodynamics and Flight Mechanics, pp.344-349, 2006. [2] Tsuda. Y., Mori, O., Takeuchi, S. and Kawaguchi, J.: Flight Result and Analysis of Solar Sail Deployment Experiment Using S-310 Sounding Rocket, Space Technology, 26 (2006), pp.33-39. [3] Nakano, T., Mori, O. and Kawaguchi, J.: Stability of Spinning Solar Sail-craft Containing A Huge Membrane, AIAA Guidance, Navigation and Control Conference and Exhibit, AIAA-2005-6152, 2005. [4] Tsuda, Y.: Improved Multi-Particle Model for Dynamics Analysis of Arbitrary-Shaped Thin Flexible Structure, Proceedings of 14th JAXA Workshop on Astrodynamics and Flight Mechanics, 2004. [5] Murakami, T.: Research on Deployment Motion of Membrane Structure in Centrifugal Force Field, Master thesis, University of Tokyo, March 2003 (in Japanese). [6] Yamada, K., Suzuki K., Hongo, M.: Fundamental Study on the Characteristics of a Rectangular Elastic Membrane in supersonic Flow, JSASS Paper, Vol. 52, No. 600, pp.30-37, 2004 (in Japanese). [7] Yamada, K., Suzuki K.: A Particle-Based Model and Its Validation for Deformation Analysis of Membrane Aeroshell, JSASS Paper, Vol. 53, No. 613, pp.51-60, 2005. [8] Tsuda, Y.: Dynamic Analysis of Spinning Solar Sail, Proceedings of 16th JAXA Workshop on Astrodynamics and Flight Mechanics, pp.350-355, 2006.
BACK TO SESSION DETAILED CONTENTS BACK TO HIGHER LEVEL CONTENTS