Embed Size (px)
Citation preview

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 1/33
5/2/2013 I/C: Regalla Srinivasa Prakash 1
Ghh-134
MODELING
BASICS

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 2/33
5/2/2013 I/C: Regalla Srinivasa Prakash 2
CHARACTERISTICS SOLID MODELING
• Solids models are known to be complete, valid,and unambiguous representations of objects.
• A complete solid is one which enables a point inspace to be classified relative to the object, if it isinside, outside or on the object.
• This classification is called as spatial addressability or set membership classification.
• A valid solid should not have dangling edges or faces, then only it will allow interference
analysis, mass property calculations, finiteelement modeling and analysis, CAPP, machinevision, and NC part programming.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 3/33
5/2/2013 I/C: Regalla Srinivasa Prakash 3
SOLID MODELING APPROACHES IN CAD PACKAGES
• All commercial CAD packages offer one or both of two different solid modeling
approaches:1) Primitives based
2) Feature based
UNIGRAPHICS (EDS Technologies), CATIA (Dassault Systems), I-DEAS (StructuralDynamics Research Corporation) offer both
approaches.SolidWorks (Dassault Systems), Pro/Engineer
(Parametric Technology Corporation).

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 4/33
5/2/2013 I/C: Regalla Srinivasa Prakash 4
SOLID ENTITIES
APPROACH ENTITIES
Primitives based
approach
Solid primitives (block,
cylinder, cone, sphere,wedge and torus)
Feature based approach Sketches

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 5/33
5/2/2013 I/C: Regalla Srinivasa Prakash 5
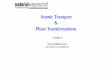
PRIMITIVE BASED SOLID MODELING
• This approach allows designers to use
predefined shapes (primitives) as buildingblocks to create complex solids.
• Designers must use Boolean operations to
combine the primitives• This approach is limited by the restricted
shapes of the primitives.
A
B
C
A, B and C are primitive solids.
A = Block
B = Cylinder
C = Cylinder
A – B – C = D :Boolean operation; Create block A and
subtract two cylinders from it using primitives approach.
D = Final solid

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 6/33
5/2/2013 I/C: Regalla Srinivasa Prakash 6
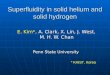
FEATURE BASED SOLID MODELING• This method is more flexible because it allows the construction of more
complicated objects and more elaborate solids more readily than theprimitive based modeling.
• Feature based modeling is in fact a generalization of primitives approach.
Boolean operations are still used, but are hidden from the user. For example, creating a protrusion on the face of a cube is a Boolean unionand creating a cut in the cube is a Boolean subtraction. These operationsare must for creation of the final solid.
* Create a rectangle
* Subtract two circles
* Extrude the resulting feature
* The required solid is obtained
Alternatively,
* Create a rectangle
* Extrude the rectangle to create the block* Selecting the top face of the block as
sketching plane, draw two circles
* Create through cuts by extrusion to
obtain the final solid

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 7/33
5/2/2013 I/C: Regalla Srinivasa Prakash 7
SOLID MODELING
• Geometry and topology
• Solid entities
• Fundamentals of solid modeling
• Half-spaces
• Boundary representation (B-Rep)
• Constructive Solid Geometry (CSG)
• Sweeps• Solid Manipulations

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 8/33
5/2/2013 I/C: Regalla Srinivasa Prakash 8
Geometry and topology
• Geometry is the actual dimensions that define
the entities of the object. It is also sometimescalled as metric information.
• Topology (sometimes called as combinatorial
structure) is the connectivity and associativity of
the object entities.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 9/33
5/2/2013 I/C: Regalla Srinivasa Prakash 9
Solid primitives

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 10/33
5/2/2013 I/C: Regalla Srinivasa Prakash 10

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 11/33
5/2/2013 I/C: Regalla Srinivasa Prakash 11
Desirable properties of solid models:
1) Rigidity: Shape of the solid model is invariant
2) Homogeneous 3-Dimensionality: No danglingportions, no isolated portions, solid boundariesare in contact with the interiors
3) Finiteness and finite describability: The two aredifferent; a (P, R, H) set describe a finitecylinder but may have infinite faces to describe
4) Closure under rigid motion and Booleanoperations: Should produce valid solids
5) Boundary determinism: Boundary must clearlydetermine the solid

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 12/33
5/2/2013 I/C: Regalla Srinivasa Prakash 12
Most commonly used representation schemes:
1) Half-Spaces
2) B-Rep (boundary representation)
3) CSG (Constructive Solid Geometry)
4) Sweeping
5) Analytic Solid Modeling
6) Cell decomposition
7) Octree Encoding8) Spatial Enumeration
9) Primitive instancing

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 13/33
5/2/2013 I/C: Regalla Srinivasa Prakash 13
HALF SPACE – FORMAL DEFINITION
A half-space is that portion of
an n-dimensional space
obtained by removing that
part lying on one side of an
(n-1)-dimensional hyperplane.
For example, half a Euclideanspace is given by the three-
dimensional region satisfying
x >0, ;
while a half-plane is given bythe two-dimensional region
satisfying x >0 ,

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 14/33
5/2/2013 I/C: Regalla Srinivasa Prakash 14
BOUNDARY REPRESENTATION (B-Rep)
• One of the two most popular and widely usedschemes (the other being CSG)
• Based on the concept that a solid is made of aset of faces, which are subsets of closed andorientable surfaces
• A closed surface is one that is continuouswithout breaks.
• An orientable surface is one where it ispossible to distinguish two sides by using thedirection of the surface normal to point inside or outside the solid model.
• Each face is bounded by edges and each edgeis bounded by vertices

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 15/33
5/2/2013 I/C: Regalla Srinivasa Prakash 15
Euler Operations and Euclidean
Calculations:
• Topology is created by Euler operations – Euler operations can be used to create, manipulate,
edit the faces, edges, and vertices of a boundarymodel
– Euler operations, similar to Boolean operations,ensure the validity (closedness, no dangling faces or edges etc.) of B-rep models
• Geometry is created by the Euclidean
calculations – Geometry includes coordinates of vertices, rigid
motion and transformation

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 16/33
5/2/2013 I/C: Regalla Srinivasa Prakash 16
Elements of B-Rep models: Types of Objects
• Two types of objects:
1) Polyhedral objects
• Consist of plane faces and straight edges
2) Curved objects
• Consist of curvilinear general surfaces andgeneral curvilinear edges

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 17/33
5/2/2013 I/C: Regalla Srinivasa Prakash 17
Elements of B-Rep models:• Faces: Face is a closed, orientable and bounded
(by edges) surface.• Edges: It is finite, non- self intersecting directed
space curve bounded by two vertices
• Vertices: Vertex is a point in space.
• Loops: It is an ordered alternating sequence of vertices and edges
• Boundary Hole: A blind hole
• Interior Hole: A hole lying inside and having no
boundary on the surface of the solid• Handles: Handle is a through hole in the solid. Itmay be termed as a 3-D hole. The number of handles in a solid is called as genus.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 18/33
5/2/2013 I/C: Regalla Srinivasa Prakash 18
POLYHEDRAL OBJECTS
• Four different classes:
1. Simple polyhedra
2. Polyhedra having loops
3. Polyhedra having boundary (blind) holes
and interior holes
4. Polyhedra having through holes or handles

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 19/33
5/2/2013 I/C: Regalla Srinivasa Prakash 19
A DISJOINT SOLID
• A solid having more than one body is
called as disjoint solid. Thus a hollow
sphere, a cuboid with internal hole, a solid
having two pieces that are completelydisconnected etc. are examples of disjoint
solids.
• Can you create a disjoint solid inPro/Engineer?

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 20/33
5/2/2013 I/C: Regalla Srinivasa Prakash 20

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 21/33
5/2/2013 I/C: Regalla Srinivasa Prakash 21
EULER OPERATIONS• Euler in 1752 proved that polyhedra that are
homomorphic to a sphere, that is their faces arenon self-intersecting and belong to closedorientable surfacse, are topologically valid if theysatisfy the following Euler-Poincare Lawequation:
F – E + V – L= 2(B – G)F= Number of faces
E= Number of edges
V= Number of vertices
L = Inner loops on facesB= bodies
G = genus (handles)

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 22/33
5/2/2013 I/C: Regalla Srinivasa Prakash 22
SIMPLE POLYHEDRA
• When L=B=G=0, then the solid satisfies
the following equation and is called as
simple polyhedron.
F – E + V = 2

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 23/33
5/2/2013 I/C: Regalla Srinivasa Prakash 23
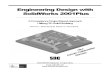
A tetrahedron is the simplest:
F = 4
E = 6
V = 4
In this case F + V - E = 2.
A cuboid is a simple solid:
F = 6
E = 12
V = 8In this case F + V - E = 2.
The given solid is simple:F = 8
E = 18
V = 12
In this case F + V - E = 2.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 24/33
5/2/2013 I/C: Regalla Srinivasa Prakash 24
SOLIDS THAT ARE NON-HOMOMORPHIC
TO A SPHERE (OPEN SOLIDS)
• Open solids satisfy the following version of
Euler law:
F – E + V – L = B – G
In this equation B refers to an open body
which can be a wire, an area or a volume.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 25/33
5/2/2013 I/C: Regalla Srinivasa Prakash 25
Open solids
WIRE OPEN POLYDRALAMINA OPEN POLYDRA
SHELL OPEN POLYDRA OPEN POLYDRA (OBJECTS)
HAVING NO TOP FACE

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 26/33
5/2/2013 I/C: Regalla Srinivasa Prakash 26
CURVED POLYHEDRA
• Simplest curbed polyhedra are cylinder
and sphere.
F = 3; E = 3; V = 2
F = 1; E = 0; V = 1

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 27/33
5/2/2013 I/C: Regalla Srinivasa Prakash 27
CURVED POLYHEDRA• If the curved objects are represented by storing
the equations of curves and surfaces of edgesand faces, the resulting boundary scheme iscalled as exact B-Rep scheme.
• Alternatively, one may use faceted B-Rep (also
called as tesselated representation), in whicheach curved face is divided into planar facets.Increasing the number of facets increasesaccuracy of display but takes more time.
• Faceted representation is not good for CNCmachining because the machine hardware willdo one more level of interpolation resulting inerrors.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 28/33
5/2/2013 I/C: Regalla Srinivasa Prakash 28
DATA STRUCTURE FOR B-Rep SOLIDS
TOPOLOGY GEOMETRY
ModelBody
Genus
Face Underlying surface equation
Loop
Edge Underlying curve equation
Vertex
CONSTRUCTIVE SOLID GEOMETRY (CSG)

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 29/33
5/2/2013 I/C: Regalla Srinivasa Prakash 29
CONSTRUCTIVE SOLID GEOMETRY (CSG)
• Principle: A physical object can be divided into a
set of primitives that can be combined in a
certain order following a set of rules (Booleanoperations) to form the object.
• Primitives themselves are valid CSG models.
Each primitive is also a solid considered to have
been built by a B-Rep process of combiningfaces from edges, edges from vertices.
• Database contains both topology and geometry
• Validity check for CSG solids is much simpler than B-Rep solids because each primitive is
already a valid solid.

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 30/33
5/2/2013 I/C: Regalla Srinivasa Prakash 30
Data structures of CSG
representation
• Graph
Diagraph
• Tree
Binary tree
Inverted Binary tree

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 31/33
5/2/2013 I/C: Regalla Srinivasa Prakash 31
Data Structure for CSG Solids:
CSG Trees
D t St t f CSG S lid CSG T

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 32/33
5/2/2013 I/C: Regalla Srinivasa Prakash 32
Data Structure for CSG Solids: CSG Trees
How to divide a given solids into primitives?OP7
OP7
OP3
P1
P4
OP1
P2
P3
OP7
OP3
P1
P5
OP1
P2
P3
nL + nR = 2n – 2
Perfect Tree:
nL = nR = n – 1
n = Total nodes

7/28/2019 Solid Modeling134
http://slidepdf.com/reader/full/solid-modeling134 33/33
5/2/2013 I/C: Regalla Srinivasa Prakash 33
SWEEPING
• A “point set” is swept along a directrix.
1. Translational sweep: Along a straightline
directrix
2. Rotational sweep: axi-symmetric rotation
3. Non-linear sweep: along a curve directrix
4. Hybrid sweep: More than one directrix5. Invalid Sweep: Produces dangling faces