Embed Size (px)
Citation preview

Solitary Waves in Layered Nonlinear Media
Randall J. LeVequeDepartment of Applied Mathematics
University of Washington
−5 0 5 10 15 20
−0.1
−0.05
0
0.05
0.1
0.15
PSfrag replacements

One-dimensional Elasticity
Notation:
X(x, t) = location of particle indexed by x in thereference (unstrained) configuration
X(x, 0) = x if initially unstrained
ε(x, t) = Xx(x, t) − 1 = strain
u(x, t) = velocity of particle indexed by x
ρ(x) = density

Constitutive relation
stress = σ(ε, x), where ε = strain
Heterogeneous =⇒ explicit dependence on x.
Linear elasticity: (Hooke’s law)
σ(ε, x) = K(x)ε
where K is the bulk modulus of compressibility.
PSfrag replacementsε
σ
linear
nonlinear

System of two conservation laws:
εt − ux = 0
(ρu)t + σx = 0
or qt + f(q, x)x = 0 with
q =[
ερu
]
=
[
q1
q2
]
, f(q, x) =
[
q2/ρ(x)−σ(q1, x)
]
Quasi-linear hyperbolic form:
qt + fq(q, x)qx = −fx(q, x)
Jacobian: fq(q, x) =
[
0 −1/ρ(x)−σε(ε, x) 0
]
Eigenvalues (wave speeds): ±√
σε/ρ.

Wave-propagation algorithms for spatially-varying fluxes
qt + f(q, x)x = 0
Work with Derek Bale, Sorin Mitran, and James Rossmanith,
A wave-propagation method for conservation laws and balance laws withspatially varying flux functions, SISC 24 (2002), pp. 955-978
Connections to relaxation schemes (Jin and Xin):Work with Marica Pelanti,
A Class of Approximate Riemann Solvers and Their Relation to RelaxationSchemes, J. Comput. Phys., 172 (2001), pp. 572-591.
Applications:• Wave propagation in heterogeneous nonlinear media• Flow in heterogeneous porous media• Traffic flow with varying road conditions• Solving conservation laws on curved manifolds

CLAWPACK
http://www.amath.washington.edu/˜claw/
• Fortran codes with Matlab graphics routines.• Many examples and applications to run or modify.• 1d, 2d, and 3d.
User supplies:• Riemann solver, splitting data into waves and fluctuations
(Need not be in conservation form)
• Boundary condition routine to extend data to ghost cellsStandard bc1.f routine includes many standard BC’s
• Initial conditions — qinit.f

Linear case: σ = Kε
qt + Aqx = 0 with q =[
εm
]
, A =
[
0 −1/ρ−K 0
]
.
Diagonalize A: R−1AR = Λ where Λ =[ −c 0
0 c
]
, c =√
K/ρ,
R =[
1 1Z −Z
]
, R−1 = 12Z
[
Z 1Z −1
]
Z = impedance = ρc =√
Kρ.
System can be written as
R−1qt + R−1AR R−1qx = 0 or wt + Λwx = 0.

Linear case
With w = R−1q,wt + Λwx = 0.
This is a decoupled pair of advection equations for thecharacteristic variables:
w1t − cw1
x = 0 =⇒ w1(x, t) = w1(x + ct, 0)
w2t + cw2
x = 0 =⇒ w2(x, t) = w2(x − ct, 0)
q(x, t) is a linear comb. of left-going and right-going waves:
q(x, t) = Rw(x, t) = w1(x, t)[
1Z
]
+ w2(x, t)[
1−Z
]
.

Example: q(x, 0) =
[
H(x)
0
]
Then
w(x, 0) = R−1q(x, 0) =1
2
[
H(x)
H(x)
]
q(x, t) = Rw(x, t) = w1(x, t)
[
1
Z
]
+ w2(x, t)
[
1
−Z
]
=1
2H(x + ct)
[
1
Z
]
+1
2H(x − ct)
[
1
−Z
]

Example: q(x, 0) =
[
H(x)
0
]
Then
w(x, 0) = R−1q(x, 0) =1
2
[
H(x)
H(x)
]
q(x, t) = Rw(x, t) = w1(x, t)
[
1
Z
]
+ w2(x, t)
[
1
−Z
]
=1
2H(x + ct)
[
1
Z
]
+1
2H(x − ct)
[
1
−Z
]

Example: q(x, 0) =
[
H(x)
0
]
Then
w(x, 0) = R−1q(x, 0) =1
2
[
H(x)
H(x)
]
q(x, t) = Rw(x, t) = w1(x, t)
[
1
Z
]
+ w2(x, t)
[
1
−Z
]
=1
2H(x + ct)
[
1
Z
]
+1
2H(x − ct)
[
1
−Z
]

Example: q(x, 0) =
[
H(x)
0
]
Then
w(x, 0) = R−1q(x, 0) =1
2
[
H(x)
H(x)
]
q(x, t) = Rw(x, t) = w1(x, t)
[
1
Z
]
+ w2(x, t)
[
1
−Z
]
=1
2H(x + ct)
[
1
Z
]
+1
2H(x − ct)
[
1
−Z
]

Example: q(x, 0) =
[
H(x)
0
]
Then
w(x, 0) = R−1q(x, 0) =1
2
[
H(x)
H(x)
]
q(x, t) = Rw(x, t) = w1(x, t)
[
1
Z
]
+ w2(x, t)
[
1
−Z
]
=1
2H(x + ct)
[
1
Z
]
+1
2H(x − ct)
[
1
−Z
]

Waves in a homogeneous linear medium
0 5 10 15 20 25 30 35 40 45 50−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
PSfrag replacements
strain
0 5 10 15 20 25 30 35 40 45 50−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
PSfrag replacementsstrain
stress
0 5 10 15 20 25 30 35 40 45 50
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
PSfrag replacementsstrainstress
velocity
0 5 10 15 20 25 30 35 40 45 50−0.4
−0.3
−0.2
−0.1
0
0.1
PSfrag replacementsstrainstress
velocity
w1
c ≡ 1, Z ≡ 1
At t = 40 the leading edge of wave is at x = 40.

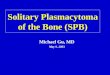
Waves in a layered elastic plate
−5 0 5 10 15 20
−0.1
−0.05
0
0.05
0.1
0.15time t = 10
−5 0 5 10 15 20
−0.1
−0.05
0
0.05
0.1
0.15time t = 15
−5 0 5 10 15 20
−0.1
−0.05
0
0.05
0.1
0.15time t = 20

Waves in a heterogeneous linear medium
0 5 10 15 20 25 30 35 40 45 50−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacements
strain
0 5 10 15 20 25 30 35 40 45 50−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacementsstrain
stress
0 5 10 15 20 25 30 35 40 45 50
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
PSfrag replacementsstrainstress
velocity
0 5 10 15 20 25 30 35 40 45 50−2
−1.5
−1
−0.5
0
0.5
PSfrag replacementsstrainstress
velocity
w1
c ≡ 1 but Z is different in the layers.
At t = 40 the leading edge of wave is at x ≈ 32.

Waves in a heterogeneous linear medium, t = 400
260 270 280 290 300 310 320 330−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacements
strain
260 270 280 290 300 310 320 330−0.1
0
0.1
0.2
0.3
0.4
0.5
stress at t = 400
PSfrag replacementsstrainstress
260 270 280 290 300 310 320 330
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
PSfrag replacementsstrainstress
velocity
260 270 280 290 300 310 320 330−2
−1.5
−1
−0.5
0
0.5
PSfrag replacementsstrainstress
velocity
w1

Waves in layered medium
Note: Form of wave depends on impedance Z.
If Z varies with x then we expect reflection at interfaces
PSfrag replacements
c
1
Zl
α
1
−Zl
β
1
Zr

Waves in layered medium
Note: Form of wave depends on impedance Z.
If Z varies with x then we expect reflection at interfaces
5 10 15 20 25 300
2
4
6
8
10
12
14
16
18
20

Nonlinear materials
εt − ux = 0
(ρu)t + σx = 0
where
σ(ε, x) = K(x)ε + βK2(x)ε2
orσ(ε, x) = eK(x)ε − 1 ≈ K(x)ε + 1
2K2(x)ε2
Layered medium can be related to Toda lattice
The wave speed increases with ε:
c(ε, x) =
√
σε(ε, x)
ρ(x)≈√
K(x)(1 + ε)
ρ(x)
Leads to shock formation in a homogeneous medium.

Nonlinear materials
εt − ux = 0
(ρu)t + σx = 0
where
σ(ε, x) = K(x)ε + βK2(x)ε2
orσ(ε, x) = eK(x)ε − 1 ≈ K(x)ε + 1
2K2(x)ε2
Layered medium can be related to Toda lattice
The wave speed increases with ε:
c(ε, x) =
√
σε(ε, x)
ρ(x)≈√
K(x)(1 + ε)
ρ(x)
Leads to shock formation in a homogeneous medium.

Nonlinear homogeneous medium
0 20 40 60 80 100 120−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3stress at time t = 40
0 20 40 60 80 100 120−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3stress at time t = 80
20 40 60 80 100 120 140−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3stress at time t = 120

Nonlinear with constant linearized impedance
Z(x) = ρ(x)c(x) =√
ρ(x)K(x)(1 + ε)
→√
ρ(x)K(x) as ε → 0
Layered medium with ρ(x)K(x) ≡ constant:
75 80 85 90 95 100 105 110 115 120
0
0.1
0.2
0.3
0.4
strain at time t = 1000

Layered nonlinear medium with ZA 6= ZB
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 30
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 60
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 100
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 250
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 450
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 600
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 750
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 950

Layered nonlinear medium with ZA 6= ZB
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 30
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 60
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 100
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 250
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 450
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 600
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 750
0 50 100 150−0.2
0
0.2
0.4
0.6
0.8stress at time t = 950

Zoomed view of 3 “stegotons”
100 105 110 115 120 125 130 135 140−0.2
0
0.2
0.4
0.6
0.8
PSfrag replacements
Stress
100 105 110 115 120 125 130 135 140−0.2
0
0.2
0.4
0.6
PSfrag replacements
Strain

Propagation of a stegoton
0 5 10 15 20 25 30−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacements
t = 20
215 220 225 230 235 240 245−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacementst = 20
t = 270
500 505 510 515 520 525 530−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacementst = 20
t = 270
t = 600

Collision of two stegotons
0 5 10 15 20 25 30−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacements
t = 20
215 220 225 230 235 240 245−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacementst = 20
t = 270
500 505 510 515 520 525 530−0.1
0
0.1
0.2
0.3
0.4
0.5
PSfrag replacementst = 20
t = 270
t = 600

Collision of two stegotons
Movie:

Solution at fixed point x0
660 680 700 720 740 760 780−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
sigma and u
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−1
−0.5
0
0.5
1
1.5
2
On the right we plot
1
aσ(x0, τ) and
1
au(x0, τ)
as functions ofτ =
√a(t − tm)
and tm is the time the velocity reaches its peak value −a.

Plot of speed vs. amplitude
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.75
0.8
0.85
0.9
amplitude
spee
d
v = 0.8 + 0.142a.

Soliton behavior?
• Relation of layered medium to Toda lattice.
Discrete nonlinear mass-spring system with soliton solutions.
• Nonlinear homogenization theory.
Reduction to higher order nonlinear PDE with constantcoefficients.

Lattice model for vibration of solids
Discrete particles coupled with springs:
Xk(t) = location of kth particle, with mass mk
Xk(0) = k∆x undisturbed configuration (∆x = 1)
Strain of spring between particle k and k + 1:
εk+1/2(t) =Xk+1(t) − Xk(t)
∆x− 1
= 0 if unstretched
Restoring force (= stress): σ(εk+1/2)
or σk+1/2(εk+1/2) if heterogeneous
Velocity: Uk(t) = X ′
k(t)

Lattice model for vibration of solids
With mk = ∆x ρk, the equations of motion are
ε′k+1/2(t) =Uk+1(t) − Uk(t)
∆x
ρkU ′
k(t) =σ(εk+1/2(t)) − σ(εk−1/2(t))
∆x
These can be viewed as a discretization of the continuum equations
εt = ux
ρut = σx
Linear springs: Hooke’s law, σ(ε) = Kε.

Toda Lattice
Layered Medium
PSfrag replacements
AAAAA BBBB
“particle layers:” ρA = O(1/wA), KA � 1
“spring layers:” ρB � 1, KB = O(1),
σB(ε) = exp(KBε) − 1
Take cA, cB � c̄ so that states equilibrate quickly within layers.

Comparison of layered medium with Toda lattice
200 210 220 230 240 250 260
0
0.05
0.1
0.15
0.2
0.25
0.3
t = 250
940 960 980 1000 1020 1040
0
0.05
0.1
0.15
0.2
0.25
0.3
t = 1000

Homogenization theory
for long wavelengths (relative to layer width)
εt − ux = 0
ρ(x)ut − σx = 0
Rewrite as equations for σ and u since these are continuous.
σt = K(x)εt
Obtain
1
K(x)σt − ux = 0
ρ(x)ut − σx = 0

Homogenization theoryAverage over distance long relative to variation in K, ρ,but short relative to variation in u, σ:
⟨
1
K(x)
⟩
σt − ux = 0 + O(δ2)
〈ρ(x)〉ut − σx = 0 + O(δ2)
or
σt − K̂ux = 0 + O(δ2)
ρ̄ut − σx = 0 + O(δ2)
where ρ̄ = 〈ρ〉, K̂ =⟨
K−1⟩
−1= harmonic average of K.
Wave speeds ±c̄ = ±√
K̂/ρ̄.

Linear periodic layered medium
PSfrag replacementsρAρA
σA(ε)σA(ε)
ρBρB
σB(ε)σB(ε)
σA = KAε, σB = KBε.
Averaged parameters: ρ̄ = 〈ρ〉 = wAρA + wBρB
K̂ =
⟨
1
K
⟩
−1
=
(
wA
KA
+wB
KB
)
−1
Effective wave speed: c̄ =
√
K̂/ρ̄.
Ex: (Santosa & Symes SIAP 51 (1991) p. 984)
ρA = KA = 4, ρB = KB = 1, wA = wB = 1/2.
Then c ≡ 1 everywhere but c̄ = 0.8.

Linear periodic layered medium
5 10 15 20 25 300
2
4
6
8
10
12
14
16
18
20
Also dispersive, with dispersion relation
ω(ξ) = c̄ξ + dξ3 + · · ·
Ref: Santosa & Symes SIAP 51 (1991) p. 984

Nonlinear homogenization theory
Work of Darryl Yong, based on his thesis with J. Kevorkian.
For the nonlinear stress strain relation
σ(ε, x) = K(x)ε + βK2(x)ε2
and layers of equal width δ/2, small relative to the wavelength.
ρ̄ut − σx = δ2
(
(ρA − ρB)(Z2A − Z2
B)
24(KA + KB)(ρA + ρB)2
)
σxxx + O(δ3)
σt − K̂ux = 2K̂(βσ − β2σ2)ux
+ δ2
(
K̂(KA − KB)(Z2A − Z2
B)
24(KA + KB)2(ρA + ρB)
)
uxxx + O(δ3).
Z =√
Kρ = impedance
• β = 0 =⇒ linear result of Santosa-Symes,• ZA = ZB =⇒ dispersive terms vanish.

Homogenized equations for exponential stress-strain
σ(ε, x) = eεK(x) − 1
ρA = KA = 4, ρB = KB = 1, wA = wB = 1/2.
ut =2σx
5+
3δ2σxxx
500+ δ4
(
3σxxxσ2x
15625(σ + 1)2−
72u2xxσx
15625(σ + 1)−
12σxxxxσx
15625(σ + 1)
−96uxxuxxx
15625−
12σxxσxxx
15625(σ + 1)−
357σxxxxx
1000000
)
+ O(δ6)
σt =8(σ + 1)ux
5+ δ2
(
3(σ + 1)uxxx
125+
3uxxσx
50
)
+ δ4
(
48uxu2xx
15625−
48σxσxxuxx
15625(σ + 1)−
4761σxxxuxx
500000−
72uxxxσ2x
15625(σ + 1)
−357(σ + 1)uxxxxx
250000−
3543uxxxxσx
500000−
3891uxxxσxx
500000
)
+ O(δ6).

Comparison of homogenized solution to DNS
-30 0 30
0
0.1
0.2
0.3
0.4 velocity at t = 0
-30 0 30
0
0.2
0.4
0.6
0.8
1 stress at t = 0
-30 0 30
0
0.1
0.2
0.3
0.4 velocity at t = 20
-30 0 30
0
0.2
0.4
0.6
0.8
1 stress at t = 20
-110 -100 -90 -80 -70 -60
0
0.1
0.2
0.3
0.4 velocity at t = 100
-110 -100 -90 -80 -70 -60
0
0.2
0.4
0.6
0.8
1 stress at t = 100
-450 -440 -430 -420 -410 -400
0
0.1
0.2
0.3
0.4 velocity at t = 500
-450 -440 -430 -420 -410 -400
0
0.2
0.4
0.6
0.8
1 stress at t = 500

Summary
• Elastic wave equations in one dimension• Hyperbolic in homogeneous medium• Layered medium with impedance mismatch leads to
dispersion• Dispersion plus nonlinearity leads to solitary waves• Relation to discrete solitons in Toda lattice• Homogenized equations can be derived
Many open questions, e.g.,• Are there exact “solitons” for the layered media equations for
particular choice of σ(ε, x)?• Behavior with other layer parameters, smooth periodic,
random media, ...• Multidimensional

Summary
• Elastic wave equations in one dimension• Hyperbolic in homogeneous medium• Layered medium with impedance mismatch leads to
dispersion• Dispersion plus nonlinearity leads to solitary waves• Relation to discrete solitons in Toda lattice• Homogenized equations can be derived
Many open questions, e.g.,• Are there exact “solitons” for the layered media equations for
particular choice of σ(ε, x)?• Behavior with other layer parameters, smooth periodic,
random media, ...• Multidimensional