-
Lecture Set 1
Some Basic ToolsSome Basic Tools
S.D. Sudhoff
Spring 2010
1
-
Outline
• Time Domain Simulation (ECE546, MA514)• Basic Methods for Time
Domain Simulation• MATLAB• ACSL
• Single and Multi-Objective Optimization (ECE580) (ECE580) •
GOSET
2
-
Time-Domain Simulation
• Resistor-Companion (Circuit) Simulation• The Good
• The Bad
• Languages• SPICE, PSPICE, SABER,PSCAD • SPICE, PSPICE,
SABER,PSCAD
• State-Variable (System) Simulation• The Good
• The Bad
• Languages• Matlab/Simulink, ACSL, EASY5, Dymola, PLECS
3
-
Background: Integration Methods
• Consider
• Forward Euler
( , )dx
f x udt
=
4
-
Background: Basic Integration Methods
• Backward Euler
• Trapezoidal
5
-
Summary
• We have
( )
1
1 1 1
1 1 1
( , )
( , )
( , ) ( , )2
k k k k
x k k k
k k k k k k
x x hf x u
x x hf x u
hx x f x u f x u
+
+ + +
+ + +
= += +
= + +
6
2
-
Convergence of Forward Euler
7
-
Convergence of Backward Euler
8
-
Resistor-Companion Simulation [1]
9
[1] L.O. Chua, P.M. Lin, Computer Aided Analysis of Electric
Circuits:Algorithms & Computation Techniques, Prentice-Hall,
1975.
-
Resistor-Companion Simulation [1]
10
-
Comments on Resistive Companion Simulation
• Good
• Bad
11
-
State Variable Based Simulation
• The Problem
• Solution Methods
f( , )d
pdt
= =x x x u
• Explicit• Forward Euler
• Runga-Kutta
• Implicit • Backward Euler
• Trapezoidal
• Gears 12
-
Forward Euler
• Recall
• Bad Features
1 ( , )k k k kx x hf x u+ = +
• Good Features
13
-
Quick Example
• Suppose we have
• And that122
12211
1.0
1.0
xxpx
uxxpx
+−=++−=
• Find x(t2) where t2=t1+∆t; ∆t=0.1 s
0)(
1)(
5)(
11
12
11
===
tu
tx
tx
14
-
Quick Example (Continued)
15
-
Observations from Euler’s Method
• To predict a future value of state, we needed to find the
present value of the time derivative of the state variables, based
on what we know – that is the present value of state variables and
present value of input variables.and present value of input
variables.
• This is true of all other explicit integration algorithms as
well
16
-
The Runge-Kutta Algorithm
• A practical explicit algorithm for
• The fourth-order implementation (RK4)
1 f( , )n nt=k x
f( , )d
tdt
=x x
17
( )
1
2 1
3 2
4 3
1 1 2 3 4
1
f( , )
1 1f ,
2 2
1 1f ,
2 2
f ,
1( 2 2 )
6
n n
n n
n n
n n
n n
n n
t
t h h
t h h
t h x h
t t h
+
+
=
= + +
= + +
= + +
= + + + +
= +
k x
k x k
k x k
k k
x x k k k k
-
Trapezoidal Predictor-Corrector Method
• Again consider
• Algorithm• Step 1- Initial Guess
f( , )d
tdt
=x x
18
• Step 2 – Iterate
until g=G or
• Step 3 – Finish step
1,1 f( , )n n n nx h t+ = +x xɶ
( )1, 1 1 1,f( , ) f( , )2n g n n n n n gh
x t t+ + + += + +x x xɶ ɶ
, 1 ,n g n g e+ −
-
MATLAB Example
• Lets consider an average-value model of a dc/dc converter
ˆ ˆ
ˆ ˆls o
us L
v dv
i di
=
=
19
0
0
ˆˆ
ˆˆ ˆˆ
ˆ ˆˆ
us L
out
in ls L LL
us out
i di
vi
R
v v r ipi
L
i ipv
C
=
=
− −=
−=
-
dcdc_sim.m% A simple simulation of a dc/dc converter
% model
parametersP.L=5e-3;P.rL=0.5;P.C=1000e-6;P.R=10.0;P.d=0.5;P.vin=300;
% time values where we want the
answertvals=linspace(0,0.2,200);
% grab the waveformsil=x(:,1);vout=x(:,2);
% plot the currentfigure(1)plot(tvals,il)xlabel('t,
s');ylabel('i_L, A');axis([0 0.2 0 400]);title('Fast Average
Inductor Current');
20
% initial condition xic=[0 0];
% maximum time stepmaxt=2e-5;
% peform the
simulation[t,x]=odefsrk(@sdcdc,tvals,xic,P,maxt);
% plot the voltagefigure(2)plot(tvals,vout)xlabel('t,
s');ylabel('v_{out}, A');axis([0 0.2 0 1000]);title('Fast Average
Output Voltage')
-
RK4 (odefsrk.m)function
[t,y]=odefsrk(fhandle,tspan,yic,par,maxt)% This routine solves a
ordinary differential equation% using a 4th order Runga-Kutta
method.% % [t,y] = odefsrk(fhandle,tspan,yic,par,maxt);%% Inputs:%%
fhandle = a handle to the function whose output is the time
derivative% of the system model. The inputs to this function are
time,% state, and parameter vales.% tspan = a vector whose elements
describe at which point in time the% solution is sought
21
% solution is sought% yic = a vector which describes the initial
condition of the system% being simulated% par = a structure which
cointains data or parameters needed to % evaluate the time
derivative of the state variables% maxt = the maximum allowed time
step% % Outputs:%% t = a vector of times at which the state vector
has been found% y = a matrix wherein each row cointains the state
vector at a% given time. Each column is the time history of a
particular% state%%
-
sdcdc.mfunction [varargout]=sdcdc(t,x,P)% This routine contains
the dynamics of an simple dc/dc converter% model% % [px] =
sdcdc(t,x,P);% [il,vout,vls,ius,iout] = sdcdc(t,x,P);%% Inputs:%% t
= time (s)% x = state vector% x(1) = fast average of inductor
current (A)% x(2) = fast average of output voltage (V)
22
% x(2) = fast average of output voltage (V)% P = structure with
parameters% P.L = inductor inductance (H)% P.rL = inductor series
resistance (Ohms)% P.C = capacitor capacitance (F)% P.R = load
resistance (Ohms)% P.vin = input voltage (V)% P.d = duty cycle
(upper switch on / total period)% % Outputs:%% px = time derivative
of state vector% px(1) = time derivative of fast average of
inductor current (A)% px(2) = time derivative of fast average of
output voltage (V)% il = fast average inductor current (A)% vout =
fast average output voltage (V)% vls = fast average lower switch
voltage (V)% ius = fast average current out ot upper switch
(A)%
-
sdcdc.m (continued)% Internal:%% pil = time derivative of il
(A/s)% pvout = time derivative of vout (V/s)%% Written by S.D.
Sudhoff % School of Electrical and Computer Engineering% 1285
Electrical Engineering Building% West Lafayette, IN 47907-1285%
Phone: 765-494-3246% Fax: 765-494-0676% E-mail:
[email protected]
23
% decompose state vectoril=x(1);vout=x(2);
% variables of
interestvls=P.d*vout;ius=P.d*il;iout=vout/P.R;
% compute derivatives of
statepil=(P.vin-P.rL*il-vls)/P.L;pvout=(ius-iout)/P.C;
% pack the state vectorpx=[pil pvout]';
-
sdcdc.m (continued again)
% output variablesif nargout==1
varargout={px};else
varargout={px,vls,ius,iout};end
end
24
-
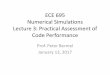
Results
250
300
350
400Fast Average Inductor Current
600
700
800
900
1000Fast Average Output Voltage
Typing ‘dcdc_sim’ from the MATLAB workspace ...
25
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
50
100
150
200
t, s
i L,
A
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
100
200
300
400
500
600
t, s
v out
, A
-
ACSL
• ACSL is • A programming language for simulation of ODEs
• It is a non-sequential language
• Consists of• A builder• A builder
• A translator
• A compiler
• A run time environment
26
-
ACSL - The Bad and Good
• Bad Features• Hard to learn
• Not very forgiving
• Easy to write poor code
• Good Features• Easy to write good code
• Extremely computationally efficient
27
-
Some Things to Know
• ACSL only sees 72 character lines
• ACSL only likes 8 character file names
• ACSL doesn’t distinguish between upper and lower case
• 2 is an integer. 2.0 is real. Watch your types !
28
-
ACSL Files
• Project File: *.PRJ (Created By Builder)
• Source Code: *.CSL (Created By You)
• Command File: *.CMD (Created By You)
• Macros: *.MAC (Created By You)
• Fortran and C Routines: (Created By You)• Fortran and C
Routines: (Created By You)
• Fortran Program *.F (Created By ACSL)
• Data File *.rrr (Created By ACSL at Runtime)
• Log File *.log (Created By ACSL at Runtime)
• Error File *.err (Created By ACSL)
29
-
ACSL Program Structure
PROGRAMINITIAL
Statements executed before run beginsState Variables do not
contain initial conditions yet
END ! InitialDYNAMIC
DERIVATIVEStatements to be integrated continuouslyStatements to
be integrated continuouslyStatements are sorted.
END ! DerivativeDISCRETE
Statements to be executed at discrete points in timeEND !
DISCRETE
Statements to be executed each communication intervalEND !
DynamicTERMINAL
Statements executed after the run terminatesEND ! Terminal
END ! Program
30
-
ACSL Example 1
• Lets consider an average-value model of a dc/dc converter
ˆ ˆ
ˆ ˆls o
us L
v dv
i di
=
=
31
0
0
ˆˆ
ˆˆ ˆˆ
ˆ ˆˆ
us L
out
in ls L LL
us out
i di
vi
R
v v r ipi
L
i ipv
C
=
=
− −=
−=
-
Example 1: sdcdc.csl
PROGRAM SDCDC
DYNAMIC
ALGORITHM IALG=4CINTERVAL CINT=2.0e-4MAXTERVAL
MAXT=2.0e-5MINTERVAL MINT=2.0e-6NSTEPS NSTEP=1
"compute dependent sources" vls=d*voutius=d*il
"compute derivative of inductor
current"piL=(vin-vls-rL*iL)/LiL=INTEG(piL,0.0)
32
NSTEPS NSTEP=1CONSTANT Tstop=0.2TERMT(t .GE.
Tstop-1.5*CINT,'Exit On Tstop');
DERIVATIVE
CONSTANT L=5.0e-3CONSTANT rL=0.5CONSTANT C=1000.0e-6CONSTANT
R=10.0CONSTANT vin=300.0CONSTANT d=0.5
"compute derivative of output
voltage"pvout=(ius-iout)/Cvout=INTEG(pvout,0.0)
"compute output current"iout=vout/r
END ! Derivative
END ! Dynamic
END ! Program
-
ALGORITHM sets the integration algorithmCINTERVAL sets the rate
that data is logged
MAXTERVAL maximum integration interval
Simulation Parameters
MINTERVAL minimum integration interval
NSTEPS number of integration intervals in one cint
TERMT terminates program on logical condition(t.GT.tstop) with
message (Exit on Tstop)
33
-
CONSTANTS sets a variable as a constant
INTEG integrates a variable, for example
Other Statements
INTEG integrates a variable, for examplex=INTEG(px,xic) makes x
equal to the time integral of px,with an initial condition of
xic
34
-
ACSL Integration Algorithms
IALG algorithm step order
1 Adams-Moulton variable varible 2 Gear's Stiff variable
variable
3 Runge-Kutta (Euler) fixed first
4 Runge-Kutta fixed second
5 Runge-Kutta fixed fourth 5 Runge-Kutta fixed fourth
6 none - -
7 user supplied - -
8 Runge-Kutta-Fehlberg variable second
9 Runge-Kutta-Fehlberg variable fifth
10 Diff. Alg. Sys. Solver variable variable
35
-
For fixed step algorithms, MINTERVAL is ignored
To directly set the integration step size and data loggingrate,
set:
Integration Algorithm Time Steps
ALGORITHM ialg=4MAXTERVAL maxt=(desired step size)CINTERVAL
cint=(desired data logging rate)NSTEPS nstep=1
Integration step size will be: min(maxt,cint/nstep)or in this
case: min(maxt,cint)
36
-
For variable step algorithms, set nstep high
For example,
ALGORITHM ialg=2CINTERVAL cint=5e-4
Integration Algorithm Time Steps
CINTERVAL cint=5e-4MAXTERVAL maxt=2e-3MINTERVAL mint=2e-5NSTEPS
nstep=1000
Integration step size starts at: cint/nstepand is bounded by
mint and maxt.If nstep is large, step size will start out small.
37
-
Example 1: sdcdc.cmd
s strplt=.t.s calplt=.f.s hvdprn=.f.
prepare t,vhat,ihatprepare il,vl,pilprepare il,vl,pilprepare
ic,iout,vout
proced dostudy
startplot il,vout
end
38
-
s = set a variable
s weditg = .false. disables the write event discriptorso that
ACSL will not createexcessive .log files.
Runtime & Command File Commands
excessive .log files.s hvdprn = .false. disables high volume
display
so that ACSL does not write highvolume information to the
screen.
s strplt = .true. enables strip plotss calplt = .false. disables
continuous plotss alcplt= .false. disables plot color (all traces
are black)
39
-
1. Start ACSL builder.2. Select New Project from the Project
menu.3. Go to directory where sdcdc.csl
and dcdc.cmd are stored.
Running Example 1
4. Single click on sdcdc.csl5. In the File name box, change the
extension to .prj, and hit ‘save’6. In the Files column, single
click boostavg.csl, and click ‘Add’7. Select Run ACSL on the Tools
menu
40
-
From ACSL runtime environment, type
Running Example 1
dostudy
41
-
• To search for errors when compiling, ACSL creates a error file
(.out). Perform a search on this file with the word error.
• You can change ialg, maxt, mint, cint, and nstps at the
runtime command line (no need to quit ACSL and change the .csl
file).
Random Notes on Running ACSL
change the .csl file).
• For controlling the range on plots use /xlo, /xhi, /lo, and
/hi
• For example: plot
vout/lo=0/hi=1000,il/lo=-200/hi=200/xl=0/xhi=0.0899
• To change the default x-axis variable use /xaxis
• For example: plot vout/xaxis=il 42
-
• If you change the .csl file, you must quit ACSL and re-start
so that ACSL will re-compile.
• You must quit ACSL before you can run ACSL again. If not, you
get a link error.
• If you change the .cmdfile, quit ACSL, and re-start
Random Notes on Running ACSL
• If you change the .cmdfile, quit ACSL, and re-start ACSL, the
program will not recompile. It will simply issue the new
commands.
• For future note: If you change a macro (.mac) file, save a new
copy of the .csl file before running ACSL so it compiles
properly.
43
-
More ACSL Features
• SCHEDULE Operator and DISCRETE Blocks
• IF THEN Constructs
• PROCEDURAL Blocks
• MACRO Facilities
44
-
SCHEDULE Operator and DISCRETE BLOCKS
• Forms:• SCHEDULE block/flag .AT. time-expression
• SCHEDULE block/flag .XZ. real-expression
• SCHEDULE block/flag .XP. real-expression
• SCHEDULE block/flag .XN. real-expression
• Where:• block = optional name of DISCRETE block
• flag = optional flag set true when event occurs
• .AT. = time to schedule event (cannot be in DERIVATIVE
block)
• .XP. = positive zero crossing (used in DERIVATIVE block)
• .XN. = negative zero crossing (used in DERIVATIVE block)
• .XZ. = zero crossing (used in DERIVATIVE block) 45
-
Example 2: A Basketball
• Dynamics:
• Collision:
vpx
gpv
=−=
• Collision:
beforeafter kvv || −=
46
-
Basket.csl Basket.cmd
PROGRAM BASKET
DERIVATIVE
ALGORITHM IALG=4MAXTERVAL MAXT=1.0e-3MINTERVAL
MINT=1.0e-6CINTERVAL CINT=1.0e-3CONSTANT tstop=5.0TERMT(t .GT.
tstop,'Exit on Tstop')
CONSTANT g=9.8 ! acceleration due to gravit y m/sCONSTANT v0=0.0
! initial velocity, m/sCONSTANT x0=2.0 ! initial height m
s weditg=.f.s hvdprn=.f.prepare /all
CONSTANT x0=2.0 ! initial height mCONSTANT k=0.9 ! rebound
coefficient
! dynamic model of
basketballpv=-gv=INTEG(pv,v0)px=vx=INTEG(v,x0)
! the floor is at height 0SCHEDULE HITFLOOR .XN. X
END
DISCRETE HITFLOORv=-k*v
END
END 47
-
Results
48
-
Example 3: Squarewave to RL Load
• Circuit:
• Dynamics: • Dynamics:
Lrivpi /)( −=
49
-
Square.csl
PROGRAM SQUARE
DERIVATIVE
ALGORITHM IALG=4MAXTERVAL MAXT=1.0e-4MINTERVAL
MINT=1.0e-6CINTERVAL CINT=1.0e - 4CINTERVAL CINT=1.0e - 4CONSTANT
tstop=0.5TERMT(t .GT. tstop,'Exit on Tstop')
! dynamic model of rl loadCONSTANT l=10.0e-3 ! Inductance in
HCONSTANT r=1.0 ! Resistance in OhmsCONSTANT i0=0.0 ! Initial
current in Api=(v-r*i)/l ! Time derivative of cu rrent
A/si=INTEG(pi,i0) ! Current, A
50
-
Square.csl (cont.)
! voltage sourceCONSTANT vmag=5.0 ! Voltage magnitudeCONSTANT
freq=10.0 ! FrequencyINITIAL
halfperiod=1.0/(2.0*freq); ! Half-Periodv=vmag ! Inital
Voltagev=vmag ! Inital VoltageSCHEDULE CHNGSGN .AT. t+halfperiod!
Schedule First Sign Change
END
END
DISCRETE CHNGSGNv=-v ! Change sign of voltageSCHEDULE CHNGSGN
.AT. t+halfperiod ! Schedule next c hange
END ! Discrete Block
END ! Program
51
-
Results:
52
-
ACSL MACRO LANGUAGE
• Primary means of constructing well organized code
• Primary means of constructing component model libraries
53
-
Example: DC/DC Converter
ˆ ˆ
ˆ ˆls o
us L
v dv
i di
=
=
54
0
0
ˆˆ
ˆˆ ˆˆ
ˆ ˆˆ
us L
out
in ls L LL
us out
i di
vi
R
v v r ipi
L
i ipv
C
=
=
− −=
−=
-
ADCDC1.CSL
"---------------------------------------------------------------------""
"" Author: S.D. Sudhoff "" Electrical Engineering Building "" 465
Northwestern Avenue "" Purdue University "" West Lafayette, IN
47905-1285 "" (765) 494-3246 "" Date: 7/6/98; Updated 8/16/2010 ""
Version: 1.1 ""
""---------------------------------------------------------------------"
55
INCLUDE 'adcdc.mac'
PROGRAM ADCDC1
DERIVATIVE
ALGORITHM IALG=4MAXTERVAL MAXT=1.0e-4CINTERVAL
CINT=1.0e-4TERMT(t .GE. tstop,'Terminated on Tstop')CONSTANT
tstop=0.2
"ideal power source"CONSTANT vin=300.0
-
ADCDC1.CSL (Cont.)
"no control"CONSTANT d=0.5
"dc/dc converter"ADCDC(con1,d,vin,iout,vout,iin, &
"Lcon1=5.0e-3","rLcon1=0.5","Ccon1=1000.0e-6")
"resistive load on converter"CONSTANT R=10.0iout=vout/R
END ! Derivative
56
END ! Program
-
ADCDC.MAC
"---------------------------------------------------------------------""
"" Author: S.D. Sudhoff "" Electrical Engineering Building "" 465
Northwestern Avenue "" Purdue University "" West Lafayette, IN
47905-1285 "" (765) 494-3246 "" Date: 7/6/98; Updated 8/17/2010. ""
Version: 1.0 ""
""---------------------------------------------------------------------""
---------------------------------------------------------------------
""
---------------------------------------------------------------------
"" "" MACRO: ADCDC "" DESCRIPTION: NLAM model of two quadrant dc/dc
converter "" "" CONCATENATION "" "" z - identifier "" "" INPUTS ""
"" d - duty cycle (upper switch on over total period) "" vin -
input voltage (V) "" iout - current out of output terminal (A) ""
“
57
-
ADCDC.MAC (Cont)
" OUTPUTS "" "" vout - output voltage (V) "" iL - inductor
current (current into input) (A) "" "" PARAMETERS "" "" L&z -
inductance of leg inductor (H) "" rL&z - resistance of leg
inductor (Ohms) "" C&z - output capacitance (F) "" "" INTERNAL
"" "
58
" "" vls - average voltage across lower switch (V) "" ius -
average current out of upper switch (A) "" p&iL - time
derivative of iin (A/s) "" p&vout - time derivative of vout
(V/s) ""
""---------------------------------------------------------------------"
MACRO ADCDC(z,d,vin,iout,vout,iL,par_L,par_rL,par_C)
INITIAL
CONSTANT par_LCONSTANT par_rLCONSTANT par_C
END
-
ADCDC.MAC (Cont.)
MACRO REDEFINE vls,ius
"compute the average voltage across the lower
switch"vls=d*vout
"compute the current out of the upper switch"ius=d*iin
"compute the input
current"p&iL=(vin-vls-rL&z*iL)/L&ziL=INTEG(p&iL,0.0)
59
"compute the output capacitor
current"p&vout=(ius-iout)/C&zvout=INTEG(p&vout,0.0)
MACRO END
-
Important Points
• MACRO REDEFINE
• Concatenation (&)
• Concatenation variable (&z)
• INITIAL Section
• Parameter passing
• MACROS can call MACROS
• Extensive MACRO Language Available
60
-
ADCDC1.CMD"---------------------------------------------------------------------""
"" Author: S.D. Sudhoff "" Electrical Engineering Building "" 465
Northwestern Avenue "" Purdue University "" West Lafayette, IN
47905-1285 "" (765) 494-3246 "" Date: 7/6/98 "" Version: 1.0 ""
""---------------------------------------------------------------------"
61
s hvdprn=.f.prepare /all
proced study1
startplot iin,vout
end
proced study2
action/var=0.1/val=0.75/loc=dstartaction /clearplot iin,vout
end
-
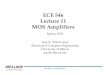
RESULTS
62
study1 study2
-
IF, IF THEN ELSE
IF (lexpr) STATEMENT
IF (lexpr) THEN
• Forms:
IF (lexpr) THENblock1
ELSE block2
END IF
63
-
IF, IF THEN ELSE
• SORTING RULES• Variables on left must be defined for all
possible
cases, or disaster can result
• Material in IF THEN construct moved as a block when sorting
with variables on the right as inputs when sorting with variables
on the right as inputs and variables on the left as outputs
64
-
IF THEN Example
IF (x .GT. 0) THENz=sqrt(x)y=z**2y=z**2
ELSEy=x**2z=2*y
END IF
65
-
ACSL PROCEDURALS
• Allows user to specify order of operations
• Internal sequence not seen or affected by sorter
• Handy for assigning elements of arrays, for iterative
solutions, or situations where you iterative solutions, or
situations where you may want to recompute a variable if it goes
out of range
66
-
PROCEDURAL Constructs
PROCEDURAL(x1,x2,..xn = y1,y2)unsorted statemens
END
• Syntax
END
• ExamplePROCEDURAL(v=i1,i3)
v(1)=3*i1+i3v(2)=i1*i3
END
67
-
PROCEDURAL Constructs
• 2nd Example
PROCEDURAL(y=x,z)y=x*3 - z^2y=x*3 - z^2IF (y .LT. 0.0) THEN
y=-yEND IF
END
68
-
PROCEDURAL Constructs
• 3rd Example
PROCEDURAL(y=x,v,N)PROCEDURAL(y=x,v,N)y=0.0DO L10 i=1,N
y=y+x(i)*v(i)L10.. CONTINUE
END
69