Embed Size (px)
DESCRIPTION
86. PETRESCU I., PETRESCU V., Some Elements in Engineering Design. Annals of the “Constantin Brâncuşi” University, Engineering Series, ISSUE 2/2009, CNCSIS 718 C, Târgu-Jiu, November 2009, “ACADEMICA BRÂCUŞI” PUBLISHER, ISSN 1842-4856, Vol. 3, nr. 2, 2009, p. 13-21, CNCSIS 255, 2009, JIF=0.845.
Citation preview

SOME ELEMENTS IN ENGINEERING DESIGN
Ion PETRESCU, PhD. Eng. Lecturer at TMR, UPB Victoria PETRESCU, PhD. Eng. Lecturer at GDGI, UPB
ABSTRACT: The paper presents first the MP-3R inverse kinematics solved directly by an original method. Second one presents the V engine kinematics and dynamics design by an original method. Third one trate shortly the dynamics design of geared transmission. Fourth one presents the cams design. Last it presents the Otto Engine Design. 1. The MP-3R Inverse Kinematics
One presents shortly an original method to solve the robot inverse kinematics exemplified at the 3R-Robots (MP-3R).
The system which must be solved (1.4) has three equations (1.1-1.3) and three
independent parameters ( ) to determine. See the figure 1 and [1]. 302010 ,, ϕϕϕ
x1
y1
z0, z1
O1
O0
x0
y0
ϕ10
a1
d1
y2
x2
O2
z2
a2
d3
d2
ϕ20
A
z3
x3
y3
O3Ba3 M
ϕ30 ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
M
M
M
zyx
203032
2021
1010
ϕϕϕϕϕϕϕ
−===
Figure 1: The geometry of 3R Robot (MP)
⎪⎩
⎪⎨
⎧
⋅+⋅+=⋅⋅+⋅+⋅⋅+⋅+⋅=⋅⋅+⋅−⋅⋅+⋅−⋅=
)3.1(sinsin)2.1(sincoscossincoscossin)1.1(coscossincoscossincos
3032021
1030310310202102101
1030310310202102101M
ϕϕϕϕϕϕϕϕϕϕϕϕϕϕϕϕ
ddazdadadydadadx
M
M (1.4)
We aim to solve the system directly obtaining accurate solutions. At first step one
multiplies the equation (1.1) with 10sinϕ− 10cosϕ and the relation (1.2) with , then add the two resulting relations and one obtains the relation (1.5) with solutions (1.6) for the first independent parameter 10ϕ .
321010 cossin aayx MM +=⋅+⋅− ϕϕ (1.5)

⎪⎪
⎩
⎪⎪
⎨
⎧
++−+⋅±⋅+−
=
++−+⋅±⋅+
=
22
232
2232
10
22
232
2232
10
)()(sin
)()(cos
MM
MMMM
MM
MMMM
yxaayxyxaa
yxaayxxyaa
ϕ
ϕ (1.6)
10cosϕ 10sinϕNow one multiply the equation (1.1) with and the relation (1.2) with , one add the two resulting relations and obtains the relation (1.7), which form with (1.3) a new
system (1.8) who generate the last two independent parameters . 3020 ϕϕ and
⎪⎪⎩
⎪⎪⎨
⎧
⋅+⋅=−
⋅+⋅=−⋅+⋅
)3.1(sinsin
)7.1(coscossincos
3032021
30320211010
ϕϕ
ϕϕϕϕ
ddaz
dddyx
M
MM (1.8)
One use the notations (1.9) and it obtains for the system (1.8) the exactly solutions
(1.10).
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⋅−=
⋅+⋅−⋅⋅+⋅⋅⋅±⋅
=
⋅+⋅−⋅⋅+⋅⋅⋅±⋅
=
3
202130
222
21
222
22
22
2112
20
222
21
222
22
22
2121
20
coscos
)(244
sin
)(244
cos
ddC
dCCkdCdCCCk
dCCkdCdCCCk
ϕϕ
ϕ
ϕ
⎪⎩
⎪⎨
⎧
−++=
−=−⋅+⋅=
23
22
22
21
12
110101 sincos
ddCCk
azCdyxC
M
MM ϕϕ(1.9) (1.10)
Finally one keeps the three solutions (1.11):
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⋅−=
⋅+⋅−⋅⋅+⋅⋅⋅±⋅
=
++−+⋅±⋅+
=
3
202130
222
21
222
22
22
2121
20
22
232
2232
10
coscos
)(244
cos
)()(cos
ddC
dCCkdCdCCCk
yxaayxxyaa
MM
MMMM
ϕϕ
ϕ
ϕ
(1.11)
2. The V Engine Design
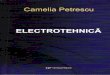
One just remembers about an original method to solve the kinematics and dynamics of V engines. The calculations can be seen in [2] and the issues in [3]. The geometry of V engine is presented in figure 2.
The V Motors’ kinematics and dynamics synthesis can be made optimally by the value of constructive angle (α).
For this reason, as generally constructive value angle was chosen randomly, after various

technical requirements constructive or otherwise, inherited or calculated by various factors (more or less essential), but never got to discuss crucial factor (which takes account of the intimate physiology of the mechanism) angle that is constructive with his immediate influence on the overall dynamics of the mechanism, the actual dynamics of the mechanism with the main engine in the V suffered, the noise and vibration are generally higher compared with the similar engines in line. This paper aims to make a major contribution to remedy this problem so that the engine in V can be optimally designed and its dynamic behavior in the operation to become blameless, higher than that of similar engines in line.
In the picture number 2 one can see the kinematics schema of the V Engine. The crank 1 has a trigonometric rotation (ω) and actions the connecting-rod 2 which moves the piston 3 along the slide bar ΔB and actions the second connecting-rod 4, which moves the second piston 5 along the slide bar ΔD. There is a constructive angle α between the two axes ΔB and ΔD.
β
ϕ
γ
γ+β
αα
α-β
O
B
D
A
C
Fm
FBm
FCmFBm
FB
FCm
FCn
FCn
FD
π/2-ϕ-β
π/2+ϕ+β-α
© 2006 Florian PETRESCUThe Copyright-LawOf March, 01, 1989,U.S. Copyright OfficeLibrary of CongressWashington, DC 20559-6000202-707-3000
V Motors’ Kinematics and Dynamics Synthesis by the Constructive Angle Value (α);Forces Distribution, Angles, Elements and Couples (Joints) Positions; a+b=l
1
24
35
ω
r
l
a
b
α/2 α/2
ΔBΔD
||ΔB
Figure 2: The geometry of V engine
The same constructive angle (α) is formed by the two arms of the connecting-rod 2; first
arm has the length l, and the second (which transmits the movement to the second connecting-rod 4) has the length a; this length a, add with the length b of the second connecting-rod 4 must gives the length l of the first connecting-rod. The crank motor force Fm is perpendicular at the crank length r, in A. A part of it (FBm) is transmitted to the first arm of connecting-rod 2 (along l) towards the first piston 3. Another part of the motor force, (FCm) is transmitted towards the second piston 5, by (along) the second arm of first connecting-rod 2 (a).
A percent (of motor force Fm) x is transmitted towards the first piston (element 3) and the percent y is transmitted towards the second piston (element 5); the sum between x and y is 1 or 100%. The dynamic velocities have the same direction like forces. From the element 2 (first arm) to the first piston (element 3) one transmits the force FB and the dynamic velocity vBD.
To force the first piston velocity equalises the dynamic value, one introduces a dynamic coefficient D . B
The second Motor’ outline can be solved now. In C, FCm and vCm are projected in FCn and

v . The transmitted force along of the second connecting-rod (FCn Cn) is projected in D on the ΔD axe in FD. One determines the dynamic coefficient in D, DD. One put the condition to have a single dynamic coefficient of the mechanism, D=D =DB D. The value of x was determined from the imposed condition to have a single dynamic coefficient for the mechanism.
The dynamic analysis made with the presented systems indicates some good values for the constructive angle (α), which allow the motor in V works normally without vibrations, noises and shocks (see the table 1):
Table 1: The alfa angle values in grad α [grad] α [grad]
0 – 8 155 – 156 12 – 17 164 – 167 23 – 25 173 – 179
With α indicate in the table 1 one can make V Engine work without vibrations. The values
presented in the table are not convenient for the motor makers; one can correct them with the relations presented in [2].
3. Geared Transmissions Design
One just remembers about an original method to solve the kinematics and dynamics of geared transmissions (see [4], figure 3, and the relation 3.1). In this paper one makes a brief presentation of an original method to obtain the efficiency of the geared transmissions in function of the cover grade. With the presented relations one can make the dynamic synthesis of the geared transmissions having in view increasing the efficiency of gearing mechanisms in work [4].
αi
O1
O2
K1
K2
j
A
rb1
rb2
i
αj
kl
ri1rj1
rl1
rk1
Fτl, vτl
Fml, vml Fτi, vτi
Fmi, vmi
© 2005 Florian Ion PETRESCUThe Copyright – LawOf March 01, 1989U.S. CopyrightLibrary of CongressWashington, DC 20559-6000202-707-3000
Figure 3: Four pairs of teeth in contact concomitantly

)1(2)12()1(321
1
121
012122
1
2
02 −⋅
⋅±−⋅⋅−⋅
⋅++
=εαπεεπα
η
ztg
ztg
m (3.1)
4. Cams Design
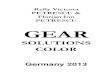
In the figure 4 one presents shortly four models of cams mechanisms [5].
τ
O
A
r0
s
s’
rA
1vr2vr
12vrB
C
Dτ
ω
δ
δ
δ
ψFr mF
rcFr F
E
© 2002 Florian PETRESCUThe Copyright-Law Of March, 01, 1989U.S. Copyright OfficeLibrary of CongressWashington, DC 20559-6000202-707-3000
α0αA
ϕθA
θB
δ
μ
γ
αA-δ
Fn, vn
Fm, vm
Fa, va
Fi, viFn, vn
Fu, v2
B
B0
A0
A
O
x
e
s 0
r0
rA
rB
s
n
C
rb
© 2002 Florian PETRESCUThe Copyright-Law Of March, 01, 1989U.S. Copyright OfficeLibrary of CongressWashington, DC 20559-6000202-707-3000
a-Cam with plate translated follower b-Cam with translated follower with roll
α0
αA
ϕθA
ψ2
μ
αB
Fn, vn
Fm, vmFa, va
Fc, vc
Fn, vn
Fu, v2
B
B0
A0
x
rbr0
rA
rB
Aδ
α B
γ
O D
ψ
ψ0d
b
b
© 2002 Florian PETRESCUThe Copyright-Law Of March, 01, 1989U.S. Copyright OfficeLibrary of CongressWashington, DC 20559-6000202-707-3000
r0
G δ
B
O D
d
A
A0
B0
H
I
ρ l
bG0
l.ψ’
ρ.ψ’
r
τ
ψ
ψ
θ
β
αMαm
xϕ
γ ψ
1
2
Fm;vm
Fa;va
Fn;vn
τ
α
© 2002 Florian PETRESCUThe Copyright-Law Of March, 01, 1989U.S. Copyright OfficeLibrary of CongressWashington, DC 20559-6000202-707-3000
c-Cam and rocking follower with roll d-Cam and general plate rocking follower
Figure 4: Cams’ kinematics and dynamics
The cams design (geometry, efficiency, forces, dynamics) can be followed in the paper [5]. 5. Otto Engine Design
In the figure 5 one presents shortly the Otto Engine Design [6].
(c)
2
222 )cos(1cossin
sin1)sin(
)sin(sin
lre
rF
rFPP
m
m
c
ui
ϕαψ
ψϕψω
ϕψψωη
⋅+−===
=⋅−⋅⋅⋅
−⋅⋅⋅⋅==
(5.1) (d)
2
222
22
]sin)cos(cos)cos([
)(sin)(sin
l
rerel
rFrF
PP
m
m
c
ui
ϕϕϕϕ
ϕψω
ϕψωη
⋅⋅++⋅⋅+−=
=−=⋅⋅
−⋅⋅⋅== (5.2)

0
0
O
A
B
l
r
e
yB
x
y
P
1
2
3
ϕ
α
ψ
ω
1
y
0
0
O
AI
BI
l
r
eP
1
2
3
ϕI
αI ψI
ω
y
0
0
O
AII
BII
l
reP
2
3
ϕII
ψII
ωl-r
xx
l+r
αII
l
near dead point
distant dead point
a - the crank is in prolonging with the connecting-rod
b - the crank is overlapped on the connecting-rod
a-The kinematical schema of Otto b-Extremely positions.
0
O
A
B
l
r
e
yB
x
y
P
ϕ
α
ψ
ω
ψ-ϕα
α
Fm
Fn
Fτ
Fn
ϕ
Fu
Fc ψ-ϕψ-ϕ
0
O
A
B
l
r
e
yB
x
y
P
ϕ
α
ψ
ω
ψ-ϕα
α
Fm
Fn
Fτ
Fn
ϕ
Fu
Fr
ψ-ϕ
ψ-ϕ
α
c-The forces of Otto-mechanism, when the d-The forces of Otto-mechanism, piston works like a motor mechanism when piston works like a steam roller
Fig. 5. The Otto Engine Design
6. Conclusions
Today industrial machines construction requires new technologies of manufacturing which require a permanently renewed fundamental research. The presented elements of industrial machines (mechanical) design are trying to fit these requirements. BIBLIOGRAPHY [1] Antonescu P.: Mecanisme şi manipulatoare, Editura Printech, Bucharest, 2000, p. 103-
104. [2] Petrescu F.I., Petrescu R.V.: V Engine Design, ICGD2009, Vol. Ib, p. 533-536, ISSN
1221-5872, Cluj-Napoca, 2009. [3] Petrescu F.I., Petrescu R.V.: Designul motoarelor în V, Revista Ingineria
Automobilului, Nr. 11, iunie 2009, p. 11-12, ISSN 1842-4074, 2009. [4] Petrescu R.V., Petrescu F.I.: Geared Transmissions Design, ICGD2009, Vol. Ib, p.
541-544, ISSN 1221-5872, Cluj-Napoca, 2009. [5] Popescu N., Petrescu R.V., Petrescu F.I.: Cam Gear Design, ICGD2009, Vol. Ia, p.
215-220, ISSN 1221-5872, Cluj-Napoca, 2009. [6] Petrescu R.V., Petrescu F.I.: Otto Engines Design, ICGD2009, Vol. Ib, p. 537-540,
ISSN 1221-5872, Cluj-Napoca, 2009.