Embed Size (px)
DESCRIPTION
Revista Somim Marzo
Citation preview

Ingeniería Mecánica
TECNOLOGÍA Y DESARROLLO
Revista de la SociedadMexicana de Ingeniería Mecánica
INGENIERÍA MECÁNICA
ISSN 1665 - 7381
vol. 4núm. 4año. 12Marzo 2013

Revista de la Sociedad Mexicana de Ingeniería Mecánica, Ingeniería MecánicaTecnología y Desarrollo. Vol. 4, Núm. 4, Año 12, Marzo 2013. ISSN 1665 - 7381.Publicación indizada en Périodica(Índice de Revistas Latinoamericanas en Ciencias), Latindex (Sistema Regional de Información en Línea para Revistas Científícas de América Latina, el Caribe, España y Portugal), Índice de Revistas Mexicanas de Investigación Científica y Tecnológica del CONACYT, Índice Electrónico Red AL y C (Red de Revistas Científicas de América Latina y el Caribe, España y Portugal) y SciELO México (Scientific Electronic Library Online México).Certificado de Reserva al Uso Exclusivo del Título:No. 04 - 2006 - 090812453800 - 102,expedido por el Instituto Nacional del Derecho de Autor el 9 de septiembre de 2006.Certificados de Licitud de Título y de Contenido, Secretaría de Gobernación: 11182 y 13609, respectivamente.Editor: Dr. Francisco J. Solorio Ordaz. Dirección: Departamento de Termoenergía, Facultad de Ingeniería, UNAM. Ciudad Universitaria, 04510, Coyoacán, México D. F. Tel: (55) 56 22 81 03, Fax: (55) 56 22 81 06, e-mail: [email protected]ón: Ing. Gerardo Guevara Flores.Es una publicación editada por la Sociedad Mexicana de Ingeniería Mecánica, SOMIM. Publicación Semestral.El contenido de los artículos firmados es responsabilidad de los autores. Prohibida la reproducción total o parcial sin previa autorización del editor. Tiraje 1000 ejemplares.Impresor: Christian Pérez HuertaIsabel la Catolica 1009 Col. Niños Heroes. C. P. 03440. México, D. F., Tel: 5842-2441Distribuidor: Sociedad Mexicana de Ingeniería Mecánica A. C.
EDITORDr. Francisco J. Solorio Ordaz
SECRETARIO TÉCNICO
Dr. Victor Hugo Jacobo A.
COMITÉ EDITORIALDr. Alfonso Feria KaiserNacional Aeronautics and Space Administration, EUA
Dr. Antonio Lozano FantobaUniversidad de Zaragoza, España
Dr. Arturo Lara LópezUniversidad de Guanajuato
Dr. Dariusz Szwedowicz WasikCentro Nacional de Investigación y Desarrollo Tecnológico
Dr. Enrique Chicurel UzielUniversidad Nacional Autónoma de México
Dr. Federico Méndez LavielleUniversidad Nacional Autónoma de México
Dr. Guillermo Aguirre EspondaConsultor Privado
Dr. Jaime Cervantes de GortariUniversidad Nacional Autónoma de México
Dr. Jesús Benajes Calvo Universidad Politécnica de Valencia, España
Dr. Jesús Razo GarcíaUniversidad de Guanajuato
Dr. Gabriel Ascanio GascaUniversidad Nacional Autónoma de México
Dr. Mihir Sen University of Notre Dame, EUA
Dr. Ricardo Chicurel UzielUniversidad Nacional Autónoma de México
Dr. Salvador Aceves SaboríoLawrence Livermore Nacional Laboratory, EUA
Dr. Yvan Houbaert IrmenUniversidad de Gante, Bélgica

EDITORIAL
Como resultado del trabajo de todos, Comité Editorial, árbitros, Consejo Directivo de la SOMIM, grupo de apoyo editorial, y por supuesto de los autores, la revista INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO ha sido aprobada para su permanencia en el Índice de Revistas Mexicanas de Investigación Científica y Tecnológica del Conacyt hasta el 2017. Con este dictamen la revista se ve fortalecida, ya que de esta manera se reconoce su nivel y liderazgo, al ser la única que aparece en dicho índice, específicamente de nuestra especialidad. Además se premia su aparición semestral ininterrumpida desde el 2002, año que la vio nacer.
Si bien esto representa un aliciente para todos los que colaboramos en la revista, también representa un compromiso que nos obliga a mantener lo alcanzado y a contemplar nuevas metas. Su inclusión en los principales índices internacionales se ha venido retrasando por diferentes razones y tendremos que hacer un esfuerzo por atender este punto. También tendremos que plantearnos la conveniencia de que la revista transite de impresa a electrónica, por sus posibles ventajas en costo, facilidad de acceso para los socios y para el público en general, incluso a nivel internacional, entre otras.
De esta manera, con este número iniciamos una nueva etapa de retos y responsabilidades, que sin duda se podrán afrontar con el apoyo de todos, principalmente de los académicos, investigadores e ingenieros en el ejercicio de la profesión que nos favorecen sometiendo a la revista los resultados de sus trabajos.
Marzo 2013
El editor

PORTADA
Balanceo automático de un rotor mediante bolas libres que cambian su posición bajo la acción de fuerzas vibratorias.
COVER
Automatic balancing of a rotor with free balls that change their position under the action of vibratory forces.

CONTENIDO
ARTÍCULOS
Vibratory Forces and Synchronization in Physical SystemsTadeusz Majewski
Departamento de Ingeniería Industrial y Mecánica, Universidad de las Américas-Puebla,Sta. Catarina Martir, Cholula, 72810 Puebla, México
Teléfono: 01 46 (222) 229 26 [email protected]
Prospectiva del Programa de Ahorro Sistemático Integral en Mexicali, Baja California, México
José A. Suástegui Macías1, Carlos Pérez Tello1
H. Enrique Campbell1, Hernán D. Magaña Almaguer2
1 Instituto de Ingeniería, Universidad Autónoma de Baja California,2 Instituto Tecnológico de Mexicali, México
119
Revista de la SociedadMexicana de Ingeniería Mecánica
INGENIERÍA MECÁNICATECNOLOGÍA Y DESARROLLO
129

INGENIERÍA MECÁNICATECNOLOGÍA Y DESARROLLO
Revista de la SociedadMexicana de Ingeniería Mecánica
Aplicación del Software SOLEEC para DiseñarColectores Solares de Canal ParabólicoErnesto Enciso Contreras, Juan Gabriel Barbosa SaldañaClaudia del C. Gutiérrez Torres, Pedro Quinto Diez, José A. Jiménez Bernal
Instituto Politécnico Nacional, SEPI-ESIME-Zacatenco. Av. Instituto Politécnico Nacional s/N, Laboratorios Pesados 3, LABINTHAPCol. Lindavista. C.P. 07738, México, D.F.Teléfono (55) 5729 – 6000 Ext. 54882E-mail: [email protected]
Effect of steering wheel acceleration frequency distribution on detection of road typeT.P. Berber-Solano1, J.A. Giacomin2, M. Ajovalasit2
1Facultad de Ingeniería Mecánica y Eléctrica, Universidad Autónoma de Nuevo LeónAv. Universidad S/N, Ciudad Universitaria, C.P. 66451, Apartado Postal 076 Suc. “F” San Nicolás de los Garza, N.L., México. 2Brunel University, School of Engineering and Design, Uxbridge, Middlesex, UB8 3PHUnited Kingdom.
135
145

Ingeniería Mecánica
119
Tadeusz MajewskiDepartamento de Ingeniería Industrial y Mecánica, Universidad de las Américas-Puebla,
Sta. Catarina Martir, Cholula, 72810 Puebla, MéxicoTeléfono: 01 46 (222) 229 26 73
INGENIERÍA MECÁNICA
TECNOLOGÍA Y DESARROLLO
Resumen
En este trabajo se estudian las fuerzas vibratorias generadas en los sistemas mecánicos así como el fenómeno de sincronización en algunos sistemas físicos. Estas fuerzas son responsables del movimiento síncrono en diferentes sistemas mecánicos. Dependiendo de la razón de frecuencia de excitación y de la frecuencia natural es posible transmitir la potencia de un lugar a otro o eliminar las vibraciones. La fase del movimiento síncrono entre dos o más objetos depende de los parámetros del sistema. Se presentan algunos ejemplos en los cuales se ilustra el uso de las ecuaciones del sistema; define las fuerzas vibratorias, se describe el com-portamiento síncrono y algunas de sus propiedades.
Abstract
In this paper vibratory forces are studied. The paper presents some physical systems in which synchronization occurs. This phe-nomenon is a result of vibratory forces. Depending on the ratio of the frequency of excitation to the natural frequency, one can obtain contactless transmission of power or the elimination of vibration. The phase angle between two or more objects that move in unison depends on the parameters of the system. For some systems mathematical models, results of simulation, and properties are presented. It is shown that in each system with vibration there are inertial forces that can change the properties of the system, generate continuous angular or rectangular motion or can give an effect of synchronization.
Vol. 4 No. 4 (2013) 119 - 128
Vibratory Forces and Synchronization in Physical Systems
Fecha de recepción: 24-10-2012Fecha de aceptación: 10-01-2013
Introduction
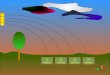
It has been observed by clock-makers that two clocks on an elastic beam or wall will start to move with the same rhythm but will move with distinct rhythms when separate. This phenomenon of synchronization was described by Huygens in the 17th century [1]. His explanation was unexpected. We now know that such behavior is a result of weak constraints between two clocks due to small vibrations that are trans-mitted between them. Very small vibrations of one clock are transmitted to the other resulting in the same rhythm in both clocks. When the difference between their rhythms is not great, after some time, the clocks move with the same frequency and the stable phase angle between them is zero or π. Fig. 1 presents two pendulum clocks and the connec-tion between them, Fig. 2 presents the difference in their frequencies when they move in unison or independently.
In nature there are many examples of this phenomenon. Howe-ver, engineers are more interested in the behavior of machines and this paper presents some examples from this area along with explanations as to why these effects take place, when syn-chronization takes place and what other effects can be obtained.
There are a few books and many articles on synchronization in different areas: nature, physics, mechanics, electronics, biology, and now also in society.
Fig.1. Two pendulum clocks on an elastic beam
Fig.2. Nonsynchronous and synchronous motion of two pendulum clocks
Palabras clave: Sincronización, fuerzas vibratorias, sistemas mecánicos, sistemas autobalanceados
Keywords: Synchronization, vibratory forces, mechanical systems, selfbalancing systems

Marzo 2013, Vol. 4
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
120
I. I. Blekhman, in his papers and books [2-4], showed many mechanical systems where synchronization takes place and also mentioned other systems with similar effects.
When objects are coupled by very rigid constrains the ob-jects can move with any frequencies and any phase angles between them, e.g. two or more gears with different num-bers of teeth – Fig.3.
When the objects are connected by weak constraints (elastic elements in mechanical systems) they are able to move with the same frequency or different frequencies, the some or opposite shift angles between them depending on the work conditions.
Two Rotors on the same Plate
One classic example is the case of two unbalanced rotors on the same vibrating base - Fig.4. Initially they have di-fferent spin velocities ω1 and ω2. When the difference bet-ween them is not great they eventually start to rotate with the same velocity ω1<ω<ω2. The resultant spin velocity ω depends on the inertia of the objects and it is closer to the spin velocity of the object with greater inertia. The rotors may move in unison with the same or opposite phase angle.
W. Bogusz and Z. Engel [5, 6] described their experiments with two rotors. One rotor is driven by a motor and the second one is connected to a current generator. After the action of the vibration of the base x(t) the second rotor starts to rotate with the same velocity as the first one and drives a generator which produces electrical power to the order of kW. In the experi-ments they had to give the second rotor an initial velocity to obtain its synchronous motion with the first rotor.
The vibration of the base x(t) is dependent on the forces ge-nerated by both rotors. The parameters of the system: mas-ses of the rotor’s unbalance -m1, m2, the mass of the base with two rotors – M, the eccentricity of the rotors– R1, R2.
When two rotors move with the same speed ω1=ω2=ω (syn-chronous motion) then the vibration of the base is defined by the equation
Mx cx kx m R t m R t&& &+ + = + +( )1 12
2 22ω ω ω ω αcos cos ' (1)
where α is an angle that defines the position of the second rotor with respect to the first one.
The vibration of the base can be taken as
x t a t a t( ) ≅ −( ) + + −( )1 2cos cosω ϕ ω α ϕ (2)
where φ is the shift angle between the excitation acting on the base and its response.
The motion of the second rotor (passive one) is a result of the inertial force acting on it from the base vibration – Fig.5. Its position with respect to the first rotor defines the equation
m R m R x t c R T c R2 22
2 2 2 2 2 2&& && & &α ω α α α= ⋅ +( ) − = −sin *
(3)
where c2 is a coefficient of the viscous resistance and
T F R m R x t* sin= ⋅ = +( )2 2 2&& ω α
is a vibratory moment acting on the second rotor.
The right side of Eq.3 presents the moment T * given by the inertial force acting on the mass m2. The vibratory moment can be taken as the average during a period of vibration τ=2π/ω and the moment has a form
T m R x t dt
m R a a
= ⋅ +( ) =
≅ − +( ) + ( )
∫1
0 5
2 20
2 22
1 2
τω α
ω α ϕ ϕ
τ
&& sin
. sin sin
(4)
Fig.6 presents vibratory moment T as a function of the posi-tion of the second rotor with respect to the first one. It can be seen that the stable angle α for the second rotor is very close to zero - α≈0o. The passive rotor should deliver torque T1 to the current generator so the passive rotor moves with delay with the active rotor (Fig.6).
The two rotors move with almost the same phase if T1≈0 or with a shift angle for T1≠0. The vibratory moment T depends on the amplitudes of vibration a1, a2 generated by both rotors.
Tadeusz Majewski
Fig.5. Forces acting on the rotor unbalance
Fig.3. Strong synchronization
Fig.4. Two unbalanced rotors on a common base

Ingeniería Mecánica
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
Vibratory Forces and Synchronization in Physical Systems 121
For the system (Fig.4) with the parameters: m1=1 kg, m2=0.7 kg, R1=R2=0.1 m, ω=70 rad/s, ω/ω0=0.7 the maximum vi-bratory torque is Tmax≈8 Nm (Fig.6). Of course only a part of it can be used for driving the generator.
It was shown that power may be transmitted from one rotor to another through the vibration of the base on which they are placed – this is considered contactless transmission of power because the rotors are not connected directly.
Selfbalancing System
The author of this paper worked with automatic balancing of the rotors where synchronization took place [7, 8]. An unba-lanced rotor has free elements in the form of balls, rollers or liquid inside the rotor or in a special drum fixed to the rotor. Under the action of vibratory forces, the free elements can change their position with respect to the rotor and changes in the rotor’s unbalance. The behavior of a mechanical system depends on the forces that act on it. The rotor’s unbalance generates vibrations and these then generate inertial forceswhich act on the free elements. Fig.7 presents an unbalanced rotor with a single degree of freedom and some free balls.
The rotor’s vibration in x direction is governed by the equationMx c x kx Me t
mR t
x
i ii
N
&& &
&
+ + = +
+ +( ) +( )=∑
ω ω
ω α ω α
2
2
1
cos
cos
(5)
A relative motion of a ball with respect to the rotor
mR c mR mx ti N
i i i i&& & &&α α ω α+ = +( )=sin ,,..., ,1
(6)
where N is the number of the balls.The balls move inside the drum at low velocity.The vibration of the rotor can be taken as
x t a t a t iii
N
( ) ≅ −( ) + + −( )=∑01
cos cosω ϕ ω α ϕ
and the rotor acceleration&&x x≅ −ω 2 .The vibratory force acting on the ball
F mx ti i* sin .= +( )&& ω α (7)
And the average inertial force acting on ith ball
F m x t dt
Fi m a
a
i i
x i x
jx
= − +( )
= − +( ) +
+
∫ωτ
ω α
ω α ϕ
τ2
02
00 5
sin ,
. [ sin
sin(αα α ϕi j xj
N
− +=∑ )]1
(8)
The vibratory force is the result of vibrations generated by the rotor’s unbalance and all balls
F F Fi i ijj
N
= +=∑01
(9)
where Fi0=-0.5mω2a0xsin(ai+φx),
is the vibratory force generated by the rotor’s unbalance and Fij=-0.5mω2ajxsin(αi-αj-φx)
is the vibratory force from jth ball.
The vibratory force for balancing with only one ball is presen-ted in Fig.8. Depending on the rotor speed the position of equi-librium of the ball can be at αf≈0 or αf=π. For αf=π the system will be balanced if the static moment of the ball is mR=Me.
It is seen that only for ω>ωo does the ball occupy the posi-tion opposite the rotor’s unbalance thus compensating for the unbalance. The ball’s position α=π is stable for ω>ωo
Fig.6. Vibratory moment for ω/ωo<1
Fig.7. Rotor with balancing balls Fig.8. Vibratory force for one ball

Marzo 2013, Vol. 4
122
and unstable for ω<ωo. If the rotor has at least two balls then the balls can compensate an unbalance from the range 0≤Me<2mR and the balls occupy the positions defined by
a a1 2 2= − = −( )arccos /Me mR (10)
The behavior of the balls during the balancing is presented in Fig.9.
The balls start from any initial positions and, under the ac-tion of vibratory forces, go to the final positions in which they compensate rotor unbalance and eliminate vibration. Fig.10 presents the position of two balls for two different unbalance of the rotor. If there is no unbalance then the balls occupy the position of the same diameter-Fig.9a.
If the rotor has some degrees of freedom, then each compo-nent of vibrations generates a vibratory force. So, for rotors with two degrees of freedom with components vibrations x(t) and y(t), the vibratory force is
F F Fi ix iy= + ' (11)
where Fix is a component force of the vibration x(t) and Fiy of vibration y(t) [9].
Balancing a Washing Machine
This method of balancing is especially suitable for washing machines and centrifuges where the unbalance changes with every use and also during the extraction of water from clothes. The free elements (balls, rollers or liquid) can be located in one or two rings - Fig.11. A rotating basket with one ring is only able to compensate static unbalance and a basket with two rings can compensate both static and dyna-mic unbalance [10, 11].
The principle of self-balancing can be presented as is shown in Fig.12. Vibrations generate the vibratory forces and they push the balls to new positions in which they compensate for the rotor’s unbalance.
In a self-balancing system there is one frequency and only the angle between the ball and unbalance changes – phase synchronization.
Dynamic Eliminator of Vibrations
If the balls are able to compensate the excitation from the rotor’s unbalance then they should also compensate any ex-citation [12 - 15], e.g. from the base vibration z(t)=zosin(Ωt) – Fig.13. The rotating drum with free balls is mounted on an object which is separated from the vibrating base by a viscous-elastic element. The frequency of excitation is Ω and the spin velocity of the drum is ω.
The behavior of the object and the balls is governed by the following equations
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 081 - 088
Tadeusz Majewski
Fig.9. Behavior of the balls during balancing with Time=ωt
Fig.10. Position of the balls with respect to the unbalance a) without the unbalance Me=0,
b) for maximum rotor’s unbalance Me=2mR
Fig.11. Balancing system for the washing machine
Fig.12. Principle of the method
Fig.13. Synchronous eliminator of vibration

Ingeniería Mecánica
123
Mx cx kx F t kz t cz t
m R ti i i ii
N
&& & &
&
+ + = + + +
+ +( ) +( )=∑
( ) ( ) ( )
cosω α ω α2
1
(12)
I m R x t Vi i i i i&& &&α ω α= +( ) −sin (13)
For a synchronous motion of the balls their position with respect to the rotor changes as
α ω δi it t( ) = −( ) +Ω (14)
The vibratory force is defined by an equation similar to Eq.8. The ball starts to move with respect to the drum with velocity Ω-ω and goes to the position opposite the object’s excitation, as such they eliminate the object’s vibration. The behavior of one ball is presented in Fig.14 and Fig.15.
The behavior of the system with two balls is shown in Fig.16.
If the difference between two spin velocities Ω-ω is great, then the balls do not move synchronously with excitation 0 ai =0 and they occupy positions in which they compensate each other (Fig.10a) – the balls do not eliminate vibrations but also do not increase them.
Dynamic Eliminators of Vibrations for Complex Systems
The method can be applied to a more complicated system in which many objects are connected by viscous-elastic ele-ments, as shown in Fig.17. Each object has two free elements as pendulums. The harmonic excitation can enter at any po-int of the system. It is interesting that such a system can
organize itself and compensate the excitation. It was shown that depending on the amplitude of the excited force it can be compensated by the free elements of the first object or for greater excitation a part of it is compensated by the first object and the rest of excitation is compensated by neighbor objects [14]. The motion of ijth object in X direction and its pendulums is governed by equations (15)
Fig.17 presents the behavior of the first object with its free elements which are not able to compensate for the excitation (Foij>2mRω2). Fig.18 presents the neighboring object whichcompensates for the rest of the excitation.
The greater the magnitude of the excitation, the deeper it enters into the system.
Pendulum with Vibrating Pivot
A lower equilibrium position of the pendulum becomes uns-table and the upper position (inverse position) may be stable with a vibrating axis of rotation O [16]. Stability depends on the magnitude and frequency of the axis’ vibrations ζ(t) – Fig.20.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
.
Vibratory Forces and Synchronization in Physical Systems
Fig.14. Behavior of the ball for Ω-ω>0
Fig.15. Behavior of the ball for Ω-ω<0
a)
b) Fig.16. Behavior of the object (a) and two balls over time (b) for Ω-ω>0
Fig.16. Synchronous eliminator of vibrations

Marzo 2013, Vol. 4
124
If the axis O vibrates vertically in a harmonic way with am-plitude A then the motion of the pendulum is defined by the Mathieu’s equation
&&ψ τ+ − ( ) =a q2 2 0sin (16)
where the coefficients a and q depend on the system para-meters.
a med J q meA J t= = =4 2 22/ , / , ,ω τ ω
J is a mass moment of the pendulum’s inertia.
The lower position of the pendulum is unstable for a=1 and inverse position is stable for the frequency of excitation
ω > 1 2A
Igme
(17)
This behavior can be explained using vibratory forces. The vibration of the pendulum’s pin is taken to be harmonic with a direction defined by the angle β.
ς ( ) sint A t= ⋅ ( )Ω (18)
As a result of vibration there are inertial forces
I mA t
I mA tx
y
= ( )= ( )
Ω Ω
Ω Ω
2
2
sin cos .
sin sin .
β
β (19)
A small vibration of the pendulum with respect to its posi-tion of equilibrium defines the equation
J c F P t&& &ψ ψ ψ ψ+ = ( ) + ( )' ,Ω (20)where
F mgeψ ψ( ) = − sin
P t me A t' , sin sinψ ψ βΩ Ω Ω( ) = −( )2
(21)
The force F(ψ) changes slowly in time but the force Q’(ψ, Ωt) depends on the frequency Ω and changes very quickly in time. They have different influences on the behavior of the pendulum. A slowly changing force F(ψ) generates a displacement ao+a(t) while a fast force P'(ψ ,Ωt) generates vibration θ(Ωt). The solution of Eq. (15) can be presented as
ψ α α θ≈ + + ( )0 ( )t tΩ (22)
where ao - defines the position of equilibrium, a(t) - slow vibration, Θ(Ωt) - fast vibration.Each competent of vibration is defined by the following equations
J c F Q&& &a a a a a a+ = +( ) + +( )0 0' (23)
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
Tadeusz Majewski
a)
b)Fig.17. Vibration of the first object (a) and
the position of its pendulums (b)
a)
b)Fig.18. Vibration of the neighboring object (a) and the position of its
pendulums (b)
Fig.20. Pendulum with vibrating axisa) forces, b) component displacements

Ingeniería Mecánica
125
J c P tmeA t
Θ Θ Θ ΩΩ
+ = == + + −( )
α
α α θ β
, ,sin sin2
0 (24)
where Q Q Q´ , , ´ , ´α α θ α α
θθ0 0( ) ≅ ( ) + ∂
∂For Ω >> mge J/ the solution of (19) has the form
θ θ α α β≅ − + −( ) ( )0 0sin sin Ωt (25)
where θ0 ≅ meA J/ .The amplitude of fast vibration depends on θo, direction of the pivot’s vibration β and the position of the pendulum’s equilibrium αo.
θ α α β0 0*sin + −( ) (26)
The influence of the fast vibration on the slow vibration can be taken as
QtQ dt
meA
T
≅ =
= − + −( )( )∫1
0 25 20
20 0
´
. sinΩ θ α α β
(27)
It is a vibratory moment generated by fast vibration θ(Ωt).
The resultant vibratory W moment for slow vibration con-sists of the moment from the gravitational force F(αo, α) and the fast vibration Q(αo, α, β).
W F Q= ( ) + ( )α α α α β0 0, , , (28)
where
F mega a a a0 0, sin( ) = − +( )At the equilibrium position of the pendulum the resultant moment is zero
W F Qα α α β0 0 0 0( ) = ( ) + ( ) =, (29)
The position of equilibrium αo defines the equation (29) and it depends on the frequency Ω, amplitude of pivot’s vibra-tion A, and its direction β.
Fig. 21 presents the behavior of the pendulum at its lower position when the frequency of excitation is close to the fre-quency of parametric resonance.
Fig. 22 presents the behavior of the pendulum with respect to its upper stable position αo= 4 rad. For the angle β=0 the amplitude of fast vibration is zero and for β≠0 the amplitude of fast vibration is
θ θ α α βF o o= + −( )sin
The vibratory moment is responsible for the equilibrium position of the pendulum and the frequency of its free vi-bration.
The change of vibratory moment when the pendulum chan-ges its position α with respect to the position of equilibrium αo is shown in Fig.23.
Vibratory forces can change the properties of the pendulum. The static lower equilibrium may become unstable and the unstable upper position may become dynamically stable due to vibratory forces.
Vibratory Transport
Vibration of the plane can generate continuous motion of the elements which are on it. This is vibratory transport [17]. The vibration of the plane generates vibratory forces Ix, Iy that push an element – Fig. 24. Direction and velocity of the element are functions of the components of vibration of the plane, their amplitude and their frequency.
This kind of transport is popular for ensemble line of small elements and the vibratory feeder is used – Fig.25. The track of the feeder has to have a component of vibration perpen-
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 118 - 128
Vibratory Forces and Synchronization in Physical Systems
Fig.21. Vibration of the pendulum about itslower position of equilibrium
Fig.22. Behavior of the inverted pendulum for Ω=150 rad/s and β=0.5 rad
Fig.23. Vibratory moment for αo=π, Ω=200 rad/s, β=0o.

Marzo 2013, Vol. 4
126
dicular to the track and another tangent to the track. To ob-tain these vibrations with one excitation force the bowl is suspended on three inclined flat springs as shown in Fig. 26.
The vibratory forces can also be used to decrease friction force (e.g. in bearings) [22].
Vibromotors
Vibromotors are used in mechatronics and robotics for very small and exact linear or angular displacement [18]. A vi-bromotor is a mechanism which converts high frequency vibrations into a continuous or stepping motion.
The vibratory motion is imparted to the member using a mag-netostrictive or piezoelectric converter. Contact between the-se and a friction force generates continuous motion.
Fig.27 presents a vibromotor with oblique collisions. A two-coordinate motion of the vibrating member defines the nor-mal and the tangential components of the impact velocity.
In the other solution (Fig.28) there are two active elements in the contact zone and the normal and tangential components of the impact velocity are formed by separate converters.
Vibratory pumps have very similar principles of action.
Vibratory Finishing
In vibratory finishing (Fig.30), a container vibrates with small elements inside abrasive material. The vibratory forces push the elements and they oscillate with respect to the abrasive material. The friction force and small impacts between the elements result in finishing their surfaces. Vibratory finishing is widely used in a large-scale production for debarring, roun-ding and brightening elements [19].
Other Mechanical Examples where Vibratory Forces and Synchronization Apper
Vibratory rammer or sledgeThe motor of the rammer generates vibration of one part and when it rams down it packs soil while the rammer slowly moves forward [20].
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
Tadeusz Majewski
Fig.25. Vibratory feeder with orientation of elements
Fig.26. Suspension of the bowl
Fig.27. Operating principle of vibromotor with oblique collision: 1) rotor; 2) vibrating element or converter [18]
Fig.28. Vibromotor with two active elements in contact zone: 1) movable; 2) stationary member [18]
Fig.29. Vibratory pump [4]
Fig.24. Element of vibrating track

Ingeniería Mecánica
Vibratory mole - inside a mechanical mole there is a vibration generator and the mole generates higher force in one direction than the other and it allows making tunnels in earth.
It is well-known that with vibrations the friction force decreases and dry friction changes into viscous friction [21-22].
In acoustics it is observed that two pipe organs with close frequencies can produce sound in unison or mute each other.
Synchroniation in Nature
An interesting example of synchronization in nature is the behavior of Asian firelies. At dusk, the flies begin to flash at random. As night falls, the flies begin to synchronize their flashing. After some time all the fireflies within an area be-gin to flash in unison. Between them there are some cons-trains through which a periodic signal is transmitted. There are other type of “vibratory forces“ between flies. As they begin to flash simultaneously they become synchronized in phase.
Initially audience applause is random but after some time clapping and stomping comes to occur in unison. Groups of soldiers also march in unison.
Synchronization is a kind of selforganization in some sys-tems. The elements of the system influence each other and
make a specific arrangement in their behavior. Some exam-ples were given in this paper (automatic balancing or dy-namic elimination of vibrations) but such examples can be found in any system (e.g, biology, social systems, etc.).
Neural oscillations refer to rhythmic or repetitive neural activity in the central nervous system. Synchronization of neuron activity is the main mechanism here. The frequency of the operation of organs is controlled by various forms of central memory organized in the neural system. Neural activity often oscillates at specific frequencies or frequency bands. The most well-known frequency band is alpha activi-ty (8-12 Hz). Neural oscillations may have different functio-nal roles in different brain areas. The system is healthy as long as it communicates properly and the subsystems per-form their operations at the right moments in time.
The self-organization of different systems can be observed from atoms or cells to the cosmos.
If telepathy really exists it could be explained by transmis-sion of waves from one person to another. If they work on similar frequencies to those of the other person, they may obtain sufficiently strong signals to decode this information.
Conclusions
It has been shown that in mechanical systems vibratory for-ces exist which can account for special behavior; synchro-nous motion (unison motion with the same or opposite pha-se), it is possible to transmit power from one rotor to another without direct connection, automatic compensation of dyna-mic forces. In other physical systems weak constraints also exist between objects which result in their synchronization.
References
[1] Christiaan Huygens, Letter to the Royal Society of Lon-don, 1673
[2] I.I. Blekhman, Synchronization of Mechanical Systems (in Russian), Nauka 1971, Moscu
[3] I.I. Blekhman, What can do vibrations (in Russian), Nauka, Moscou 1988
[4] I.I. Blekhman, Vibrational Mechanics, Nonlinear Dyna-mic Effects. World Scientic, 2000, Singapore
[5] W. Bogusz, Z. Engel. Investigation of a system for con-tactless transmission of power (in Polish). Science-technical information, HPR 20, 1965
[6] W. Bogusz, Z. Engel. Experimental investigation of self-synchronization systems. Overview of Mechanical Enginee-ring (in Polish), 1965, No.8, pp.230-232
[7] T. Majewski, R. Domagalski, M. Meraz. Dynamic com-pensation of dynamic forces in two planes for the rigid ro-tor. Journal of Theoretical and Applied Mechanics, No 2, Vol. 45, 2007, pp.379 – 403
Vibratory Forces and Synchronization in Physical Systems 127
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 4 (2013) 119 - 128
Fig.30. Vibratory finishing
Fig.31. Synchronous flashing of fireflies

Marzo 2013, Vol. 4
[8] T. Majewski, D. Szwedowicz, A. Herrera, Automatic elimination of vibrations for a centrifuge. Mechanism and Machine Theory, Volume 46(3), March 2011, pp.344-357
[9] L. Sperling, B. Ryzhik, Ch. Linz, H. Duckstein, Simu-lation of two-plane automatic balancing of a rigid a rotor, Mathematics and Computers in Simulation, Vol.58, Issues 4-6, 2002
[10] T. Majewski, Compensation system of the dynamic forces in the clothes washer, XVI Congreso Internacional Anual de la SOMIM, 2010, Monterey
[11] T. Majewski, I. Valenzuela, Fluid automatic balancer for a washing machine, XVI Congreso Internacional Anual de la SOMIM, 2010, Monterey
[12] T. Majewski, Synchronous vibration eliminator for an object having one degree of freedom, Journal of Sound and Vibration, 112(3), 1987, pp.401 - 413
[13] T. Majewski, Synchronous vibration elimination in the plane. Journal of Sound and Vibration, 232(2), 2000, pp.553-570, pp.571-584
[14] T. Majewski, Synchronous Eliminator of Vibration in 3-D, 14th US National Congress of Theoretical and Applied Mechanics, June 23-28, 2002, Blacksburg, USA
[15] T. Majewski, The properties of a dynamic eliminator for a car s vibrations, Mechanism and Machine Theory, 45 (10), (2010) , pp.1449-1461
[16] T. Majewski, R. Sokolowska, Vibrational mechanics for the pendulum with oscillating pivot, International Con-ference MECHATRONICS2004, Warsaw, Poland, 2004, pp.187-190
[17] T. Majewski, O. Paleta, Modelado de movimiento vi-bratorio. Computación Aplicada a la Industria de Procesos CAIP2003, pp.337 -340, UDLA, 2003
[18] K. Ragulskis, R. Bansevicius, R. Barauskas, G. Kul-vietis, Vibromotors for Precision Microrobots, Hemisphere Publishing Corporation, New York 1998
[19] T. Majewski, R. Sokolowska, Analysis of viscous-elas-tic model in vibratory processing, Springer Berlin Heidel-berg New York, 2007, pp.490-494
[20] T. Majewski, R. Bravo. Análisis de una compactado-ra de placa vibratoria, Congreso Internacional Anual de la SOMIM, Puebla, 2008
[21] T. Majewski, J. Saenz, R. Sokolowska. Friction bet-ween a body with an elastic layer and vibrating plane. Ma-chine Dynamics Problems 2006, vol.30, No.2, pp. 103-112
[22] T. Majewski, Resultant friction for a system with vibra-tion. Machine Dynamics Problems 2008, Vol.32, No.2, pp. 38 – 48
Tadeusz Majewski128

Ingeniería Mecánica
129
José A. Suástegui Macías1, Carlos Pérez Tello1, H. Enrique Campbell1, Hernán D. Magaña Almaguer2
1 Instituto de Ingeniería, Universidad Autónoma de Baja California,2 Instituto Tecnológico de Mexicali, México
INGENIERÍA MECÁNICA
TECNOLOGÍA Y DESARROLLO
Resumen
El propósito de este trabajo es brindar información actualizada que permita elaborar una prospectiva del programa impulsado por el gobierno federal mexicano bajo el nombre de Programa de Ahorro Sistemático Integral (ASI) para el ahorro y uso eficiente de energía en el sector vivienda de Mexicali, Baja California. El presente estudio se realiza utilizando datos históricos del programa desde 1990 a la fecha e históricos de consumo de usuarios del servicio eléctrico.
Se analiza la evolución del programa; el efecto del consumo eléctrico en el sector doméstico durante su gestión, su impacto en la emisión de gases de efecto invernadero y se analizan comparativamente las modalidades del programa para determinar su trascendencia y proyección hacia el año 2017 disgregando información y evaluando indicadores energéticos.
Con base en los hallazgos de este estudio se plantean conclusiones y recomendaciones.
Abstract
The scope of this work is to provide updated information that helps to make a foresight of an energy efficiency program promot-ed by the Mexican Federal Government developed for household use in Mexicali, Baja California, named Programa de Ahorro Sistemático Integral (ASI). This study analyzes historical data from 1990 to present date.
The evolution of the program is analyzed from historical information available and evaluates energy indicators. The effects on electricity consumption on the household sector during the development of the program are calculated. The impact over emis-sion of greenhouse gases (GHG) and a comparative analysis of the different subprograms is made to determine its importance and projection towards 2017. Based on the results obtained, conclusions and recommendations are stated.
Vol. 4 No. 4 (2013) 129 - 134
Prospectiva del Programa de Ahorro Sistemático Integral en Mexicali, Baja California, México
Fecha de recepción: 02-10-2012Fecha de aceptación: 15-01-2013
Palabras clave: uso eficiente de energía, consumo eléctrico, gases de efecto invernadero, indicadores energéticos
Keywords: efficient use of energy, energy consumption, greenhouse gas, energy indicators
Introducción
El uso eficiente de la energía es un tema que ha cobrado relevancia para enfoques económicos, políticos, ecológicos y sociales desde hace más de 20 años, es por ello que los go-biernos alrededor del mundo han generado políticas orienta-das a la creación de programas que apoyen el logro de dicho fin. Muchos países incluido México, han utilizado paquetes de estímulos fiscales para invertirlos en programas destina-dos al uso eficiente de energía en el sector vivienda de las ciudades que presentan un consumo eléctrico muy elevado, ya que dicho sector representa el 25.82% del consumo total de electricidad en el país (CFE, 2012).
Particularmente en la ciudad de Mexicali, B. C. que cuenta con temperaturas que alcanzan los 50˚C en el verano, el con-sumo promedio mensual anual es de 390 kWh/hab, lo cual resulta ser más del doble del promedio nacional que es de tan sólo 154 kWh/hab (Campbell R. H., Pérez T. C., Palacios B. R., Montero A. G. y Benítez Z. J., 2006). Lo anterior ha
ocasionado una fuerte demanda social, por lo que en 1990 se creó por parte del gobierno federal, el fideicomiso No. 728 Fideicomiso para el Aislamiento Térmico de la Vivienda (FIPATERM) como un fondo retornable de financiamiento para el aislamiento térmico de los techos de las viviendas de la ciudad.
En 1990 a través del FIPATERM se contemplaba como meta el aislamiento de 25 mil viviendas, las cuales se aislaron en un periodo de tres años. El programa siguió funcionando sin cambios significativos hasta enero de 1997, cuando se firmó un convenio para la modificación del fideicomiso (Gómez R. A., 2005). En el convenio se agregaron tres nuevos subpro-gramas para el ahorro de energía; la sustitución de equipos de aire acondicionado, la sustitución de focos incandescen-tes por lámparas fluorescentes compactas y el sellado de puertas, este último descontinuado poco tiempo después.
Para poseer un título de registro de marca, en noviembre de 2003 se presentó ante el Instituto Mexicano de la Propiedad

Marzo 2013, Vol. 4
Industrial el logotipo del Programa de Ahorro Sistemático Integral (ASI), el cual finalmente se aprobó en febrero de 2004 y es así como se le conoce a la fecha. Los subprogra-mas que actualmente operan, cuentan con financiamiento de 36 a 48 meses a una tasa de interés de 12% sobre saldos inso-lutos y con techo financiero diferente para cada subprograma (Gómez R. A., 2005).
De 2007 a 2010 se incrementaron de manera muy significa-tiva las acciones realizadas de cada uno de los subprogramas del programa ASI, lo cual mostró la buena respuesta de los usuarios del servicio eléctrico mexicalense hacia los progra-mas de ahorro y uso eficiente de energía (véanse tabla 1).
Tabla 1. Histórico de acciones del programa ASI
Año Viviendas Aisladas
Refrigeradores Sustituidos
Unidades Tipo Central
Unidades Tipo Ventana o Mini
Split
2007 2747 25 12 20
2008 2442 264 159 1002
2009 2649 1247 143 5562
2010 3714 2622 279 13255Historial de acciones de aislamiento térmico, refrigeradores, aire acondicionado central y aire acondicionado de tipo ventana o mi-nisplit realizadas por parte del programa ASI en Mexicali, B. C. (Programa ASI, 2010).
Desarrollo
Con el fin de realizar un estudio que evalúe el impacto de cada subprograma del programa ASI en cuanto al ahorro y uso eficiente de energía en los hogares mexicalenses, la me-todología empleada se expone en los siguientes puntos:
• Se obtuvo información acerca de la red eléctrica de Baja California.
• Se recabó información de 100 viviendas mexicalenses para determinar sus dimensiones, materiales constructi-vos, orientación, hábitos de uso eléctrico, cantidad y tipo de electrodomésticos e historial de consumo eléctrico.
• Mediante el simulador de cargas térmicas proporciona-do por el instituto de ingeniería de la Universidad Autó-noma de Baja California (UABC) se simuló cada una de
las viviendas para reproducir el comportamiento ener-gético real en su estado actual e identificar las posibles acciones de ahorro y uso eficiente de energía.
• Se generaron diferentes escenarios y sus porcentajes de ahorro en el consumo eléctrico para cada uno de los subprogramas del programa ASI.
• Se proyectó el desempeño por parte del programa ASI en cuanto acciones realizadas hasta el año 2017.
• Se determinaron los beneficios en cuanto ahorro de energía y su respectivo impacto en los costos de produc-ción energética.
• Se cuantificaron los gases de efecto invernadero (GEI) evitados por cada subprograma para los próximos años.
Dada la distribución de los valores se utilizó un ajuste por re-gresión lineal de la tendencia esperada de acciones realizadas a través del tiempo hasta el año 2017 para cada uno de los subpro-gramas del programa ASI. Donde x es el año evaluado, y P es la cantidad de acciones para ese año. Se indica también el grado de correlación R² de cada una de las ecuaciones de ajuste (véase tabla 2).
Dicha proyección se usó como referencia para la obtención del costo de producción de energía eléctrica que se espera evitar en los próximos años, así como los GEI que se dejarán de emitir a la atmósfera en el mismo período.
Tabla 2. Ecuaciones de ajuste para la proyección de acciones de ahorro energético
Subprograma Correlación
Casas Aisladas P1=(330.7)*(x)-663737.7R²=0.96
Unidades Centrales Sustituidas P2=(78.5)*(x)-157519R²=0.86
Unidades de Ventana o mini-split Sustituidas
P3=(4426.5)*(x)-8885667R²=0.90
Refrigeradores Sustituidos P4=(867.4)*(x)-1741108R²=0.93
Se validó el simulador de cargas térmicas mediante un com-parativo de las simulaciones de consumo eléctrico hechas a las 100 viviendas encuestadas contra el consumo eléctrico
130
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 129 - 134
SuáStegui MacíaS J. a., Pérez tello c., caMPbell H. e., Magaña alMaguer H. D.
Figura 1. Comparativo anual de los consumos eléctricos simulados contra los registrados en el recibo eléctrico de las viviendas encuestadas.

Ingeniería Mecánica
reportado por la compañía eléctrica en períodos anuales y durante los meses de verano (mayo a octubre), lo anterior se observa en las figuras 1 y 2.
Una vez validado el simulador de cargas térmicas, se utilizó para reproducir el comportamiento eléctrico de los escenarios que corresponden al aplicar los subprogramas del programa ASI. Se promedió un consumo eléctrico acumulado anual para la ciudad de Mexicali, B. C. de 8550 kWh/vivienda con una desviación estándar en el resultado de 3% respecto a los históricos de consumo reportados por la compañía eléctrica. Basados en lo anterior, se obtuvo que el consumo eléctrico mensual que se da en la ciudad es de 712.5 kWh/vivienda.
Con los resultados mencionados anteriormente, se pudo obte-ner los porcentajes de ahorro en el consumo eléctrico que se esperan para cada subprograma vigente del programa ASI con respecto a las viviendas encuestadas en un escenario en don-de no se aplica acciones de ahorro y uso eficiente de energía.
131
Dicha evaluación se dio para periodos anuales y durante los meses de verano. Los resultados se observan en la figura 3.
En cuanto a la prospectiva de acciones del programa ASI, se comprobó que para el aislamiento térmico existe una correla-ción muy cercana a 1, lo que indica una relación muy fuerte entre el pasar de los años y las acciones de aislamiento de viviendas, resultando evidente pocas acciones de aislamiento a una tasa de crecimiento muy pequeña. Para las unidades de aire acondicionado sustituidas la correlación tuvo resultados mixtos 0.86 y 0.90 para unidades centrales y de ventana o mini split respectivamente, por esa razón existe un poco de incertidumbre en la cantidad de acciones esperadas en cuan-to sustitución de unidades centrales y caso contrario, la sus-titución de aire acondicionado de tipo ventana o mini split se espera una tasa de crecimiento elevada con una certidumbre aceptable. Para la sustitución de refrigeradores existió una gran relación de las unidades sustituidas con respecto al paso de los años, ya que el coeficiente de correlación fue de 0.93 y
ProSPectiva Del PrograMa De aHorro SiSteMático integral en Mexicali, baJa california, México
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 129 - 134
Figura 2. Comparativo para los meses de verano de los consumos eléctricos simulados contra los registrados en el recibo eléctrico de las viviendas encuestadas.
Figura 3. Porcentajes de ahorro de energía eléctrica para cada subprograma del programa ASI.

Marzo 2013, Vol. 4
132
su tasa de crecimiento resulta elevada por lo que se espera una gran cantidad de acciones para el año 2017 (véase figura 4). Por otra parte, mediante los escenarios de simulación se pudo identificar el promedio de ahorro mensual anualizado de consumo eléctrico que se da al aplicar cada subprograma del programa ASI (véase tabla 3).
Tabla 3. Ahorro energético promedio por subprograma.
Subprograma Ahorro por Acción (kWh/mes)
Aislamiento en Techo 88.49
Aire Acondicionado Central 233.56
Aire Acondicionado Tipo Ventana o Minisplit 224.87
Refrigerador 47.67
Se aplicó un análisis comparativo de cada subprograma acerca de su ahorro de energía eléctrica para demostrar cuál genera mayor impacto en la reducción de consumo eléctrico, GEI evitado e inversión para generación eléctrica evitada. Se calcularon los MWh/año de energía eléctrica que se espera ahorrar por el total de acciones realizadas del programa ASI en los próximos años a través de cada uno de sus subpro-gramas vigentes, tomando en cuenta la cantidad de kWh ahorradas por acción de cada uno de ellos (véanse tabla 4).
A partir de la tabla 5, se calculó el ahorro económico que se espera obtener por subprograma en cuanto a costo de gene-ración eléctrica. Se tomó como referencia a la red eléctrica de Baja California en donde el costo de generación es de 0.90 pesos/kWh (CFE, 2011) (véase tabla 5).
Tabla 4. Prospectiva de Ahorro de Energía
Prospectiva de Ahorro de Energía Eléctrica por Subprograma(Mwh/año)
Año Aislamiento Térmico
A/C Central A/C Ventana o Mini split
Refrigeradores
2012 1,732 1,186 55,189 2,3452013 2,083 1,406 67,133 2,8422014 2,434 1,626 79,077 3,3382015 2,785 1,846 91,022 3,8342016 3,136 2,066 102,966 4,3302017 3,488 2,286 114,911 4,826Total 15,658 10,413 510,297 21,515
Tabla 5. Prospectiva de Ahorro Económico
Ahorro de Económico por Subprograma(Pesos/año)
Año AislamientoTérmico A/C Central A/C Ventana Refrigeradores
2012 1,564,170.81 1,070,872.65 49,850,773.92 2,118,560.41
2013 1,881,378.93 1,269,604.33 60,639,892.64 2,566,721.39
2014 2,198,587.05 1,468,336.02 71,429,011.37 3,014,882.37
2015 2,515,795.18 1,667,067.70 82,218,130.10 3,463,043.36
2016 2,833,003.30 1,865,799.39 93,007,248.82 3,911,204.34
2017 3,150,211.42 2,064,531.07 103,796,367.55 4,359,365.33
Total 14,143,146.68 9,406,211.16 460,941,424.41 19,433,777.20
La tabla 5 muestra claramente que el subprograma de sustitución de aire acondicionado de ventana o mini split de 2012 a 2017 logrará un ahorro económico en cuanto a generación eléctrica de 460 millones de pesos; más de 20 veces el ahorro económico en generación eléctrica logrado por cualquier otro subprograma.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 129 - 134
SuáStegui MacíaS J. a., Pérez tello c., caMPbell H. e., Magaña alMaguer H. D.
Figura 4. Proyección de acciones realizadas por el programa ASI hasta el año 2017.

Ingeniería Mecánica
133
Conociendo el ahorro de energía por acción de cada subpro-grama y la cantidad de acciones esperadas para el programa ASI hasta el 2017, se determinaron los GEI evitados (véase tabla 6). Para su efecto, se utilizaron los factores de emisión de la red eléctrica de Baja California propuestos por Cam-pbell R. H., Samaniego R. M., Montero A.G. y Lambert A. A. (2010) y un listado de centrales generadoras de la red eléctrica de Baja California, en donde la capacidad de gene-ración efectiva para dicha red es de 2266 MW de la cual 14% corresponde a plantas de generación de tipo termoeléctrico, 28% de tipo geotérmico, 14% de turbo gas y 43% de ciclo combinado (CFE, 2011).
Tabla 6. Factores de emisión de la red eléctrica de Baja California
Tipo de GEI Factor de Emisión(kg/MWh)
CO2 155.46
SO2 0.58
NOx 0.27
Las tablas anteriores sirvieron de base para calcular una prospectiva hasta el 2017 de algunos tipos GEI evitados por subprograma del programa ASI para la red eléctrica de Baja California (véase figura 4 y 6).
De las figuras 5 y 6 se pudieron identificar que la sustitu-ción de aire acondicionado de tipo ventana o mini split es el subprograma que más evitará emisiones de GEI (CO2 y NOx) hasta el año 2017. Dicha prospectiva se hace con una gran certidumbre en los datos pues la correlación en la cual se basó la proyección fue de las más elevadas.
Conclusiones y Recomendaciones.
En este estudio se llegaron a las siguientes conclusiones.
1. En todos los subprogramas existe una tendencia positiva en cuanto a las acciones realizadas a través del tiempo, por lo que el gobierno ha acertado en la elección y man-tenimiento de los mismos
2. Con la sustitución de aire acondicionado en la vivienda se pueden obtener más del 30% de ahorro en el consumo eléctrico anual, lo cual lo coloca como el subprograma mas viable debido a los bajos costos de inversión y a los altos beneficios económicos y ambientales.
3. La sustitución de aire acondicionado tipo ventana o mini split es el subprograma que más potencial tiene para el ahorro de energía, debido al número de acciones de sustitución que se proyectan realizar por parte del programa ASI.
4. Al aplicar los dos subprogramas con mayor impacto por acción (aislamiento térmico y sustitución de aire acon-dicionado central), se obtiene un ahorro superior al de 50% en el consumo eléctrico de la vivienda.
5. Con base en el análisis del ahorro de energía eléctrica total se puede concluir que de 2012 a 2017 los ahorros económicos acumulados por el programa ASI serán su-periores a los 50 millones de dólares. Dicho ahorro es comparable a la inversión que se requiere para la cons-trucción de una planta 125 Mw de ciclo combinado, por lo que con el programa ASI la Comisión Federal de Electricidad ha evitado grandes inversiones en cuanto a generación y distribución eléctrica.
Para futuras investigaciones para este tema se recomienda.
1. La proyección realizada para el subprograma de sustitu-ción de refrigeradores está limitada por los pocos datos históricos disponibles. Por lo tanto, es necesario consi-derar ese aspecto en los estudios futuros.
2. Para utilizar los resultados de este trabajo para evaluar la viabilidad del programa ASI, se deben considerar también la inversión y ahorro económicos que se gene-raron por programas que se descontinuaron. Así como, la inversión y ahorro que podrían generar los subprogra-mas que se tenga previsto crear.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 129 - 134
ProSPectiva Del PrograMa De aHorro SiSteMático integral en Mexicali, baJa california, México
Figura 5. Prospectiva de las emisiones de CO2 evitadas hasta el año 2017.

Marzo 2013, Vol. 4
Agradecimientos
Se agradece sinceramente a todas las personas que apoyaron en el desarrollo de esta investigación, los sujetos de estudio que desinteresadamente aportaron sus datos y a los coautores que mediante sus contribuciones fue posible que se llevara a buen término el presente estudio.
Referencias
[1] Campbell R. H., Pérez T. C., Palacios B. R., Montero A. G., Benítez Z. J. Adaptación de Metodologías en Prospecti-vas del Sector Eléctrico a Nivel Regional. Caso: Baja Cali-fornia, México. Biblioteca Virtual de las Ciencias en Cuba, 2006.
[2] Campbell R. H., Samaniego R. M., Montero A.G., Lam-bert A. A. Emisión de Gases a la Atmósfera por la Genera-ción de Electricidad, Memorias del XXXI Encuentro Nacio-nal de la AMIDIQ, 2010.
[3] Comisión Federal de Electricidad (CFE). Costo de Gene-ración por Tecnología, 2011, pp. 1-2.
[4] Comisión Federal de Electricidad (CFE). Listado de Cen-trales Generadoras, Unidad de Control de Gestión, 2011.
[5] Comisión Federal de Electricidad (CFE). Ventas Directas al Publico, Por Sector, 2012.
[6] Gómez R. A. Resultados de la Aplicación del Programa ASI, 2005, pp.19-27.
[7] Programa de Ahorro Sistemático Integral (ASI).Historial de Acciones realizadas por subprograma, 2010.
134
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 129 - 134
SuáStegui MacíaS J. a., Pérez tello c., caMPbell H. e., Magaña alMaguer H. D.
Figura 6. Prospectiva de las emisiones de NOx evitadas hasta el año 2017.

Ingeniería Mecánica
FR Factor de flujo del concentrador solar
Gb Irradiación solar directa (W⁄m2 )
ha Coeficiente convectivo del aire del medio ambiente (W⁄(m2 K))
L Longitud del concentrador solar (m)
m Flujo másico (kg⁄s)
Qp1 Flujo de calor perdido desde el tubo absorbedor al tubo transparente (W)
Qp2 Flujo de calor perdido del tubo trasparente al ambiente (W)
Nomenclatura
a Apertura de la parábola del concentrador solar (m)
Aa Área de apertura del concentrador solar (m2)
Af Factor de pérdidas de área en el concentrador solar (m2)
Ar Área externa del tubo absorbedor (m2)
Cp Capacidad calorífica del fluido de trabajo (J⁄(kg K))
Dci Diámetro interno del tubo transparente (m)
Dco Diámetro externo del tubo transparente (m)
Dre Diámetro externo del tubo absorbedor (m)
f Distancia focal de la parábola del concentrador solar (m)
135
Ernesto Enciso Contreras, Juan Gabriel Barbosa Saldaña, Claudia del C. Gutiérrez TorresPedro Quinto Diez, José A. Jiménez Bernal
Instituto Politécnico Nacional, SEPI-ESIME-Zacatenco. Av. Instituto Politécnico Nacional s/N, Laboratorios Pesados 3, LABINTHAP
Col. Lindavista. C.P. 07738, México, D.F.Teléfono (55) 5729 – 6000 Ext. 54882
E-mail: [email protected]
INGENIERÍA MECÁNICA
TECNOLOGÍA Y DESARROLLO
Resumen
En el presente trabajo se muestran las aplicaciones del programa SOLEEC el cual proporciona las características geométricas de diseño para Concentradores Solares de Canal Parabólico (PTC) basados en el diámetro del tubo absorbedor. Se puede elegir entre diferentes materiales que se utilizan en la construcción de este tipo de concentradores y realizar combinaciones entre ellos. La evaluación térmica se basa en la irradiación solar para un lugar específico utilizando el modelo ideal de Hottel o bien introducien-do los datos de irradiación solar, latitud y longitud del lugar en cuestión. Los resultados que se obtienen son datos geométricos del concentrador como, apertura, distancia focal y longitud del concentrador, características térmicas como flujo de calor útil, pérdidas hacia el ambiente, flujo másico, temperaturas de los tubos absorbedor y transparente, eficiencia térmica y óptica. Se realizó un estudio para la Ciudad de Monterrey demostrando la versatilidad del software diesñado.
Abstract
The present work shows some applications of the software SOLEEC, which is used to get the best geometric designing features for Parabolic Trough Collectors (PTC) based on the receiver tube external diameter. Users can choose different manufacturing materials among the most used for these collectors and then make a thermal evaluation for a PTC design. Thermal evaluation is based on solar radiation for a specific place on Earth computed by Hottel’s model or providing solar radiation measured data, the latitude and longitude of the place in question. Results of goemetrical features such as aperture, focal distance and colector’s length, as well as thermal caracteristics such as heat gain, heat lost, mass flow rate, reciever and glazing tube temperatures and thermal and optical efficiences are presented in a friendly interface of the software. An studio was carried out for Monterrey and the versatility of the software was proved.
Vol. 4 No. 4 (2013) 135 - 143
Aplicación del Software SOLEEC para DiseñarColectores Solares de Canal Parabólico
Fecha de recepción: 13-11-2012Fecha de aceptación: 25-01-2013
Palabras clave: Irradiación solar, concentrador solar de canal parabólico, programa de cómputo, SOLEEC
Keywords: Solar radiation, parbolic through collector, software, SOLEEC
.

Marzo 2013, Vol. 4
Qu1 Flujo de calor obtenido por el fluido de trabajo (W)
Qu2 Flujo de calor entregado por el concentrador solar (W)
S Irradiación solar que llega al tubo absorbedor (W⁄m2)
Ta Temperatura ambiente (OC)
Tal Temperatura de los alrededores (OC)
Tco Temperatura externa del tubo transparente (OC)
Tci Temperatura interna del tubo transparente (OC)
Tfe Temperatura del fluido de trabajo al salir del concentrador (OC)
Tfi Temperatura del fluido de trabajo al ingresar al concentrador (OC)
Tre Temperatura dela pared externa del tubo absorbedor (OC)
UL Coeficiente de pérdidas totales del concentrador solar (W⁄(m2 K))
α Absortividad de la superficie selectiva en el tubo absorbedor
γ Factor de intercepción
εc Emisividad del material del tubo transparente
εr Emisividad de la superficie selectiva en el tubo absorbedor
ηo Eficiencia óptica
ηt Eficiencia térmica
θ Ángulo de incidencia de la irradiación solar (°)
σ Constante de Stefan-Boltzmann (W⁄(m2 K4 ))
τ Transmisividad del tubo transparente
Introducción
En la actualidad existen muchos países en el mundo que se están sumando a la generación de energía mediante concen-tradores solares de concentración de canal y disco parabó-lico, así como tecnologías de torre de helióstatos. Por men-cionar algunos ejemplos, en 2009 se anunciaron los planes para construir una planta solar en la región central de China que generará 2 GW de energía y ocupará una extensión de 64 km2 utilizando concentradores solares de canal parabó-lico para concentrar la radiación solar.1 Una vez terminada, la planta producirá el equivalente a dos plantas termoeléc-tricas de carbón y será capaz de dar energía a 3 millones de hogares. Por otro lado, Sudáfrica ha dado a conocer los planos de una planta solar que utilizará espejos y paneles solares de gran capacidad que generará alrededor de 5 GW 1 http://www.gstriatum.com/energiasolar/blog/2011/01/05/first-solar-cons-truye-en-china-la-planta-solar-mas-grande-del-mundo/
de energía eléctrica. El proyecto inicial ocupará un área de 9,000 hectáreas2. El desarrollo comercial con la tecnología solar más eficiente del mundo será construido en Phoenix, con 60 unidades de discos parabólicos de concetración de la empresa Stirling Energy Systems, y que generarán cada una la cantidad de 1.5 MW3.
De los países de Iberoamérica, España es sin duda el que más ha desarrollado la energía solar ya que ha adoptado agresivas políticas a favor del uso de las energías renovables. Cuenta con 6 plantas que utilizan concentrador de canal parabólico de 50 MW cada una y dos plantas con torre solar con ca-pacidad de 20 y 11 MW respectivamente, y actualmente se encuentran en construcción 16 plantas más para cuadruplicar su capacidad en energía solar térmica4.
En México actualmente no se cuenta con una planta de ener-gía solar térmica, sin embargo, CFE tiene un proyecto que se inició en diciembre de 2010 para la construcción de un campo solar en Agua Prieta Sonora que tendrá una capacidad de 12 MW5.
Por otra parte, en la epóca actual las herramientas computa-cionales se han convertido en un gran apoyo para el desarro-llo tecnológico mundial ya que permiten analizar y diseñar de manera rápida y económica los sistemas o equipos que se usan en la ingeniería. Dentro de las principales caracte-rísticas que deben reunir estas herramientas, es tener un alto grado de confiabilidad para obtener resultados óptimos al ser aplicados a una tarea específica, así como la de proporcionar un manejo simple que permita una sencilla interacción entre el usuario y la herramienta computacional. Con las herra-mientas de cómputo se tiene la ventaja de ofrecer resultados confiables sin la necesidad de hacer dispositivos complejos que requieran la inversión de cantidades fuertes de dinero. En la actualidad existen algunas empresas que ofrecen sis-temas solares térmicos para calentamiento de agua en ca-sas, conjuntamente con un software que permiten el diseño y configuración de los equipos para conseguir resultados óptimos según las necesidades de cada instalación en parti-cular, como VELUX6 Solar. De forma análoga, el software CENSOL7, desarrollado en España, ofrece datos de diseño de captadores solares térmicos planos en función de la zona geográfica, época del año y la aplicación o uso final. Para el análisis de colectores de concentración tipo PTC se han desarrollado herramientas computacionales con tareas específicas como es el caso del software Dymola/Modelica (Birnbaum et al., 2011) utilizado para modelar y simplificar 2 http://www.gstriatum.com/energiasolar/blog/2010/10/28/sudafrica-anun-cia-el-parque-solar-mas-grande-del-mundo/3 http://www.gstriatum.com/energiasolar/blog/2009/09/14/la-tecnologia-solar-mas-eficiente-en-el-2010/4 http://www.gstriatum.com/energiasolar/blog/2009/06/15/energia-solar-en-espana/5 http://www.cfe.gob.mx/proveedores/licitaciones/Paginas/Licitaciondel-primercamposolar.aspx6 http://www.soloarquitectura.com/productos/producto2009011504.html. 20097 http://fotovoltaica.com/cen_fchart/cen_fchart.htm. 2009
136
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
Enciso Contreras E., Barbosa Saldaña J. G., Gutiérrez Torres C. del C., Quinto Diez P., Jiménez Bernal José A.

Ingeniería Mecánica
un campo de concentradores solares para generación directa de vapor. Ésta se obtiene en dos etapas: una de calentamiento, dónde el agua es llevada a las condiciones de saturación y posteriormente el vapor saturado es trasportado a la sección de sobrecalentamiento, la cual consta de otro campo de con-centradores solares del mismo tipo. Otra aplicación de soft-ware de diseño es la que realiza el programa de cómputo PTCDES el cuál optimiza y calcula la cantidad de vapor en un sistema de generación directa que consta de una combina-ción de un concentrador solar acoplado a un tanque separa-dor (Kalogirou et al., 1997). Este software utiliza valores de irradiación solar directa para una superficie horizontal con-siderando el día representativo de cada mes y la temperatura del aire ambiente usando como referencia los datos anuales para Nicosia, Chipre. Utilizando la diferencia de entalpías entre el agua caliente y el agua en el tanque separador se calcula la producción de vapor en el sistema.
Otro ejemplo de aplicación de software para el diseño de equipos termosolares es el IPSE-pro (Eck et al., 2006), cuyo principal objetivo es la simulación de los componentes para una planta de potencia convencional.
Con un próposito similar y siguiendo las estrategias naciona-les para el desarrollo de tecnología sustentable, en el Instituto Politécnico Nacional se hizo el desarrollo de un software de-nominado SOLEEC (SOLEEC, 2012), el cual es una herra-mienta computacional que permite el diseño de concentra-dores solares de canal parabólico (PTC) y que proporciona las mejores alternativas de construcción considerando cinco configuraciones geométricas diferentes, así como la evalua-ción del recurso solar en el lugar donde se pretenda instalar. Lo anterior cumple con el objetivo de desarrollar investiga-ción encaminada al desarrollo de concentradores solares de alta eficiencia y elevada temperatura a bajos costos. A conti-
nuación en las secciones posteriores se hace una descripción de la metodología y modelo sobre el que trabaja la herra-mienta numérica desarrollada, así como la validación de la misma y se presenta un ejemplo de aplicación.
Metodología
El programa SOLEEC determina las características geomé-tricas de un concentrador solar de canal parabólico a partir del diámetro externo del tubo absorbedor considerando un ángulo de borde de 90°; ya que con este valor se tiene la re-lación de concentración máxima (Kalogirou, 2009). A partir del diámetro del absorbedor, se pueden conocer la apertura de la parábola, la distancia focal y la longitud mínima del concentrador considerando la pérdida de área efectiva del 20%, de tal manera que con estos datos se tienen todos los parámetros geométricos de un concentrador solar como el que se muestra en la figura (1).
El flujo de calor ganado por el fluido de trabajo que pasa por el concentrador se calcula con la ecuación (1) mientras que el calor entregado por el concentrador solar se representa por la ecuación (2). Finalmente, la ecuación (1) y (2) representan el mismo concepto visto desde el fluido de trabajo y desde la operación del concentrador, respectivamente.
Qu fe f imCp T T1 = −( )& (1)
Qu R ar
aL f i aF A S A
AU T T2 = − −( )
(2)
La ecuación (1) representa el calor ganado por el fluido de trabajo bajo las condiciones de operación de diseño, es de-cir, la temperatura de entrada y salida del fluido de trabajo
Figura 1. Diagrama esquemático de la geometría del concentrador tipo PTC.
137
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
aPlicación Del Software Soleec Para DiSeñar colectoreS SolareS De canal Parabólico

Marzo 2013, Vol. 4
y el flujo másico requerido para alcanzarlas (Incropera et al., 2007). En la ecuación (2) el parámetro S representa la cantidad de irradiación solar que es aprovechada dentro del tubo absorbedor, es decir, la cantidad de irradiación solar que incide en el concetrador (Gb) multiplicado por la eficiencia óptica del mismo (h0); la cual se calcula con la ecuación (3).
η ρταγ θ θ0 1= − ( ) ( ) Af tan cos (3)
La ecuación (3) involucra las propiedades ópticas de los ma-teriales de construcción de la parábola (términos del lado de-recho de la ecuación fuera de los corchetes). Por cuestiones de diseño para un concentrador ideal, el factor de intercep-ción es igual a la unidad ( γ=1).
El parámetro Af es una área que se pierde debido a las som-bras, bloqueos de la irradiación solar y pérdidas debidas a la reflexión hacia la orilla del absorbedor provocadas por el ángulo de incidencia de la irradiación solar que se representa con θ. Este parámetro se calcula por medio de la ecuación (4)
Aah fa a
fAf
p
a
=+ +
23
148
2
2
(4)
En donde hp es la altura de la parábola, que para concentra-dores con ángulo de borde de 90° se debe cumplir con: hp=f (Kalogirou, 2009).
Las pérdidas del concentrador se obtienen por medio de un proceso iterativo que involucra las ecuaciones (5) y (6) y que debido a que no hay una acumulación de calor, ambas deben tener el mismo valor. La ecuación (5) representa las pérdidas de calor del tubo absorbedor al tubo transparente mientras que la ecuación (6) representa las pérdidas de éste último hacia al medio ambiente.
Q pre re ci
r
c
c
re
ci
D L T T
DD
1
4 4
1 1=
−( )+ −
π σ
εεε
(5)
Q p CO a CO a c CO CO alD Lh T T D L T T24 4= −( ) + −( )π ε π σ (6)
Finalmente, la ecuación (7) representa el calor perdido en el tubo absorbedor en relación al área del concetrador.
Q p
rL r aA
U T T1 = −( )
(7)
De esta última ecuación se obtiene el término UL que repre-senta las pérdidas de calor en el concetrador debidas a las condiciones de trabajo, así como las características y pro-piedades ópticas de los materiales de construcción y de la geometría del mismo (Duffie et al., 2006).
Al igualar las ecuaciones (1) y (2), si en la ecuación (2) los términos del lado derecho se asocian a la radiación solar in-
cidente y a las características geométricas del concentrador y por tanto son conocidas, entonces para mantener la igualdad se pueden proponer diferentes cantidades de flujo másico del fluido de trabajo para alcanzar la temperatura final a la salida del concentrador cuando se proporciona la temperatura de entrada del fluido de trabajo a la entrada del concentrador. En el programa SOLEEC, dicha condición se obtuvo por medio de un proceso iterativo iniciando con un valor de flujo má-sico de 0.003 kg⁄s y aumentándolo en intervalos de 0.0001 kg⁄s hasta encontrar la condición requerida de Qu2-Qu1≈0. (Enciso, 2012)
De esta manera, una vez calculado el dato de flujo másico para una configuración geométrica y así calcular los flujos de calor en el concentrador, el software SOLEEC propone otra configuración y así sucesivamente, hasta obtener las características de operación de 5 configuraciones y de esta manera porporcionar la información al usuario para que pue-da evaluar y analizar la misma y lograr el diseño óptimo del concentrador tipo PTC para satisfacer la demanda de energía requerida.
Una vez calculando el flujo de calor útil, la eficiencia térmica del concentrador se determina con la ecuación (8).
h = Qu
b aG A1
(8)
En el apartado siguiente se muestran la validación y la apli-cación del software.
Descripción del software
El programa SOLEEC está codificado en una plataforma MATLAB 2009a. Cuenta con una interfaz gráfica que per-mite al usuario una interacción más manejable y compren-sible para la introducción de los datos y la visualización de resultados. Consta de un archivo ejecutable que permite la ejecución del software desde cualquier computadora y su in-teracción es por medio de interfaces y máscaras que permi-ten al usuario una comunicación sencilla y una interpretación de resultados simple, ya que para la evaluación del recurso solar muestra gráficas para interpretación de los resultados y para la evaluación térmica del concentrador, muestra tablas de resultados debidamente organizadas.
El programa se divide en dos etapas. La primera se enfoca en la evaluación del recurso de energía solar que incide en un lugar específico; de esta manera se puede evaluar la rentabi-lidad de la instalación de un concentrador o en que épocas del año habría suficiente energía para ser aprovechada por este medio. Se pueden elegir 3 opciones para la evaluación del recurso solar; la primera comprende los datos para un día específico del año, la segunda entrega datos promedio para un mes específico y la tercera opción proporciona valores promedios para cada mes del año.
La segunda fase del programa permite la evaluación térmica de concentradores tipo PTC. El programa ofrece la opción
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
138 Enciso Contreras E., Barbosa Saldaña J. G., Gutiérrez Torres C. del C., Quinto Diez P., Jiménez Bernal José A.

Ingeniería Mecánica
de evaluar 5 configuraciones diferentes de concentradores, considerando diferentes relaciones geométricas del mismo (figura 1). En ambos casos el desarrollo se basa en función de la irradiación solar incidente, la ubicación del concentrador, su geometría, los materiales utilizados para su fabricación y las condiciones ambientales y de operación a las que estará sometido.
La estructura general del programa SOLEEC se muestra en un diagrama de bloques en la figura (2).
Figura 2.- Diagrama de flujo del programa SOLEEC.
La validación del programa SOLEEC en lo que respecta al diseño del PTC, se llevó a cabo haciendo una comparación entre los resultados que éste entrega y los resultados de un análisis experimental realizado en Sandia National Labora-tories y un análisis numérico realizado en el Centro de In-vestigación en Energía de la UNAM (García-Valladares et al., 2008). El proceso de validación consistió en ejecutar el programa SOLEEC para simular 9 pruebas; la primera uti-lizando agua como fluido de trabajo y las otras 8 utilizando aceite térmico Syltherm-800, reproduciendo las condiciones descritas en la tabla (1).
Tabla 1.- Condiciones de las pruebas realizadas en el PTC
Casos Irradiación solar (W⁄m2)
Velocidad del aire ambiente
(m⁄s)
Temperatura ambiente (oC)
Temperatura al ingresar al
tubo absorbe-dor (oC)
Temperatura al salir del
tubo absor-bedor (oC)
1 807.9 1 15.8 18.3 36.1
2 933.7 2.6 21.2 102.2 124
3 968.2 3.7 22.4 151.0 173.3
4 982.3 2.5 24.3 197.5 219.5
5 909.5 3.3 26.2 250.7 269.4
6 937.9 1 28.8 297.8 316.9
7 880.6 2.9 27.5 299.0 317.2
8 903.2 4.2 31.1 355.9 374
9 920.9 2.6 29.5 379.5 398
Los resultados comparativos de las referencias mencionadas y el software SOLEEC se indican en la tabla (2). En esta tabla se muestra la eficiencia térmica obtenida experimental-mente y numéricamente por García-Valladares y Velázquez y la eficiencia calculada por el software SOLEEC, así como la diferencia porcentual (error %) entre ambos datos.
De los resultados anteriores se puede observar que el error con respecto a los resultados experimentales se encuentra en-tre 0.14% y 6.7%, lo cual es un resultado aceptable.
Con los resultados obtenidos anteriormente se comprueba que el programa SOLEEC puede utilizarse como una he-rramienta auxiliar para que el usuario pueda obtener datos confiables en el diseño geométrico de un PTC, considerando los materiales de construcción y su ubicación con respecto al Sol y a partir de ellos hacer un análisis más completo y de esta manera decidir el lugar y el tamaño del concentrador, de acuerdo con las necesidades de la aplicación.
Una vez demostrada la correcta ejecución del software SO-LEEC para la evaluación y diseño de concentradores tipo PTC, el siguiente apartado se destina a mostrar la aplicabili-dad del mismo para diferentes condiciones y determinar así su potencialidad como herramienta de cálculo y diseño de sistemas solares tipo PTC.
Resultados
El menú principal del software SOLEEC se muestra en la figura (3). Se divide en la evaluación del recurso solar y la sección del diseño de concentradores PTC. Los íconos indi-can claramente su descripción y función.
Figura 3.- Menú principal del programa SOLEEC.
Para poner a prueba el funcionamiento del software SO-LEEC se realizaró un ejemplo utilizando los datos de la Ciudad de Monterrey, Nuevo León. La ciudad se encuentra situada a una Latitud Norte de 25.66°, una Longitud Oeste de
139
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
aPlicación Del Software Soleec Para DiSeñar colectoreS SolareS De canal Parabólico

Marzo 2013, Vol. 4
100.3°, reporta una temperatura diaria promedio de 23°C y está a una altura de 530m SNM. La aplicación propuesta pre-tende definir un diseño que proporcione las dimensiones del concentrador solar PTC para que la temperatura del fluido de trabajo alcance a la salida del concentrador una temperatura de 250°C y el sistema de seguimiento solar que se utilice sea de 2 ejes; por lo tanto, el ángulo de incidencia de la irradia-ción solar tiene un valor de cero para cualquier hora del día. Se deben de conocer los datos de irradiación solar en la su-perficie terrestre para la localidad en cuestión, los cuales se calculan con el software SOLEEC utilizando el modelo aproximado de Hottel (Hottel, 1976).
La figura (4) muestra la interfaz donde se relizan estos cál-culos. Los valores de irradiación van desde 359 W⁄m2 en los meses más fríos hasta 601 W⁄m2 en Verano. Es evidente que la cantidad de energía solar disponible es elevada, por lo tanto este sitio se puede considerar como privilegiado para llevar a acabo instalaciones con concentradores solares PTC. También se observan otras gráficas que muestran datos como el valor de la constante solar y la declinación terrestre para la latitud estudiada a lo largo de todo el año. Las horas de inso-lación que se tienen a lo largo del año y las horas de puesta y salida del Sol en función del tiempo solar son datos funda-mentales para la evaluación y factibilidad de la instalación
Tabla 2.- Resultados de los análisis realizados para la validación del programa
Pruebas 1 2 3 4 5 6 7 8 9
Gasto volumétrico (l⁄min)
Experimental 18.4 47.7 47.8 49.1 54.7 55.5 55.6 56.3 56.8
Numérico 18.4 47.7 47.8 49.1 54.7 55.5 55.6 56.3 56.8
SOLEEC 18 45.66 46.52 48.28 53.27 54.70 53.47 56.91 58.08
Error (%)* 2.17 4.28 2.68 1.67 2.61 1.44 3.83 1.08 2.25
Flujo de calor útil (W)
Experimental 22884.33 26404.01 26771.70 26881.92 24918.03 24865.79 23669.47 22480.47 22389.47
Numérico 22808.71 25741.27 26480.95 26556.28 24212.16 24653.64 23037.55 22963.05 22928.20
SOLEEC 22243.60 24889.34 25510.32 25563.21 23247.50 23531.98 21901.70 21992.24 22355.62
Error (%)* 2.80 5.74 4.71 4.91 6.70 5.36 7.47 2.17 0.15
Eficiencia térmica (%)
Experimental 72.63±1.91 72.51±1.95 70.90±1.92 70.17±1.81 70.25±1.90 67.98±1.86 68.92±2.06 63.82±2.36 62.34±2.41
Numérico 72.39 70.69 70.13 69.32 68.26 67.40 67.08 65.19 63.84
SOLEEC 70.60 68.35 67.56 66.73 65.54 64.33 63.77 62.43 62.25
Error (%)* 2.79 5.74 4.71 4.90 6.70 5.37 7.47 2.18 0.14
*El error se presenta al comparar los resultados del programa SOLEEC contra los resultados experimentales.
Figura 4.- Datos característicos de la latitud que corresponde a la Ciudad de Monterrey.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
140 Enciso Contreras E., Barbosa Saldaña J. G., Gutiérrez Torres C. del C., Quinto Diez P., Jiménez Bernal José A.

Ingeniería Mecánica
solar. Para la Ciudad de Monterrey los valores más bajos de insolación son de alrededor de 10.5 horas y los máximos de 13.5 horas, por lo tanto se tienen muchas horas disponibles a lo largo del año para aprovechar el recurso solar.
Los datos de irradiación solar que se calcularon en la figu-ra (4) se utilizan en el recuadro de ingreso de datos de la interfaz donde se calculan los parámetros de diseño para el concentrador PTC (figura 5). Los materiales selecciona-dos para la construcción del concentrador se seleccionan en las opciones que proporciona el software SOLEEC. Para este caso de estudio se seleccionaron los materiales mostrados en la tabla (3). Las condiciones ambientales de la Ciudad de Monterrey y los datos de temperatura del fluido de trabajo al ingresar y al salir del concentrador también deben de ingresarse para iniciar el cómputo de las geometrías y evaluación térmica del concentrador. Si alguno de los datos mostrados falta, no es posible la eje-cución del software SOLEEC, ya que todos van ligados en las subrutinas del software y son de gran importancia para el diseño del concentrador.
Tabla 3.- Materiales utilizados para el concentrador.
Superficie reflectiva Aluminio anodizado
Superficie selectiva Pintura de sulfato de plomo
Tubo absorbedor Cobre
Tubo transparente Borosilicato
Fluido de trabajo Aceite térmico syltherm-800
Al llevar a cabo la ejecución del software SOLEEC se ob-tienen las tablas de resultados que representan los datos de diseño del concentrador solar para cada configuración pro-
puesta (figura 5). Algunas de las tablas con los resultados de la interfaz de la figura (5) se muestran completas en las tablas (4), (5), (6) y (7).
La tabla (4) correspondiente a la sección Geometría del Con-centrador Solar de la interfaz indica las dimensiones pro-puestas para el concentrador. Los tamaños van aumentando conforme el diámetro del tubo absorbedor aumenta y por lo tanto se tiene una variedad de diseños propuestos para cubrir la necesidad de energía requerida.
Tabla 4.- Características geométricas del concentrador.
CONFIGURACIONES1 2 3 4 5
Diámetro nominal del tubo absorbedor (plg)
0.75 1 2 3 4
Apertura (m) 2.44 3.35 6.37 9.60 12.62Longitud focal (m) 0.61 0.84 1.59 2.40 3.15Longitud del concentrador (m)
6.28 8.58 16.19 24.35 31.96
Diámetro interno del tubo transparente (m)
0.062 0.07 0.095 0.125 0.151
Espesor del tubo transparente (m)
0.004 0.005 0.005 0.005 0.007
El funcionamiento del concentrador solar está en función de la cantidad de irradiación solar disponible que se apro-vechará en el fluido de trabajo. Por tal razón, el software SOLEEC realiza una evaluación para cada configuración y para cada valor de irradiación solar mensual, de tal manera que se pueda definir los meses en los cuales cualquiera de las configuraciones de diseño presenta mejores características de comportamiento o en su caso proponer un nuevo diseño con materiales y geometría diferentes.
Figura 5.- Interfaz que muestra las características de diseño del concentrador PTC para evaluación anual.
141
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
aPlicación Del Software Soleec Para DiSeñar colectoreS SolareS De canal Parabólico

Marzo 2013, Vol. 4
Se observa en la tabla (5), correspondiente a la sección Flujo másico en la interfaz, el aumento en el mismo conforme au-menta el tamaño del concentrador. Esta situación se atribuye a que el calor útil que se obtiene es mayor si el tamaño del concentrador se incrementa y por tanto el fluido requiere me-nor o mayor tiempo de residencia para alcanzar la tempertura deseada. El gasto volumétrico se modifica para cada valor de irradiación con el fin de garantizar la condición de tempera-tura del fluido de trabajo requerida y que no ocurra el cambio de fase como se indicó en el proceso de metodología.
Tabla 5.- Gasto volumétrico (lt⁄min) necesario para llegar a la condición de temperatura establecida.
MesCONFIGURACIONES
1 2 3 4 5
Enero 0.7123 1.2850 4.0607 8.0774 12.6888
Febrero 0.8591 1.5714 4.9859 9.9719 15.7289
Marzo 1.0354 1.8945 6.0507 12.1675 19.2756
Abril 1.0133 1.8505 5.8965 11.8517 18.7689
Mayo 1.0868 1.9826 6.3371 12.7549 20.2302
Junio 1.1088 2.0193 6.4619 13.0119 20.6414
Julio 1.0941 1.9973 6.3811 12.8430 20.3697
Agosto 1.0354 1.8945 6.0507 12.1675 19.2829
Septiembre 0.9252 1.6889 5.3604 10.7503 16.9845
Octubre 0.9105 1.6669 5.2870 10.5961 16.7349
Noviembre 0.7417 1.3511 4.2663 8.5106 13.3791
Diciembre 0.6609 1.2043 3.7890 7.5267 11.8077 La tabla (6) muestra los datos de Flujo de Calor Útil que proporciona la interfaz. El aumento en el tamaño del con-centrador provoca que el calor útil aumente, por que la ra-diación captada es mayor. Lo anterior provoca que el caudal del fluido de trabajo se incremente y por tanto es requerida una mayor potencia de bombeo para alcanzar el flujo corres-pondiente.
Por otra parte, la mayoría de las pérdidas hacia el ambien-te se producen por radiación debido a las altas temperaturas que se presentan en el tubo absorbedor (Flujo de pérdidas de calor en la interfaz de la figura 5), y conforme aumenta la longitud del tubo absorbedor del concentrador, también aumentan las pérdidas, lo que ocasiona una disminución en la eficiencia térmica del concentrador solar (tabla 7 y sección Eficiencia térmica en la interfaz de la figura 5).
También en la interfaz se muestra la temperatura del tubo transparente con el fin de considerar cambios en las propie-dades mecánicas y ópticas del material, y así poder conside-rar si es el material propuesto es adecuado o se requiere de otra elección.
Los resultados que proporciona el software SOLEEC y que se resumen en las tablas anteriores permiten definir el tipo de aplicación que podría tener cada configuración, basados en el flujo de calor útil, la eficiencia, las pérdias de calor y el flujo másico requerido.
Tabla 6.- Flujo de calor útil (W).
MesCONFIGURACIONES
1 2 3 4 5
Enero 4057.0 7319.4 23129 46008 72274
Febrero 4893.5 8950.6 28399 56798 89589
Marzo 5897.3 10791 34464 69304 109790
Abril 5771.9 10540 33586 67506 106900
Mayo 6190.1 11293 36095 72650 115230
Junio 6315.6 11502 36806 74114 117570
Julio 6231.9 11376 36346 73152 116020
Agosto 5897.3 10791 34464 69304 109830
Septiembre 5270.0 9619.8 30532 61232 96741
Octubre 5186.3 9494.3 30114 60354 95319
Noviembre 4224.3 7695.8 24300 48475 76205
Diciembre 3764.3 6859.3 21582 42871 67255
Tabla 7.- Eficiencia térmica del concentrador (%).
MesCONFIGURACIONES
1 2 3 4 5
Enero 68.81 66.22 58.31 51.12 46.57
Febrero 68.08 66.42 58.74 51.77 47.35
Marzo 68.11 66.48 59.17 52.44 48.17
Abril 68.30 66.52 59.08 52.33 48.06
Mayo 68.41 66.57 59.30 52.60 48.38
Junio 68.53 66.57 59.37 52.69 48.47
Julio 68.43 66.64 59.33 52.63 48.41
Agosto 68.10 66.47 59.16 52.43 48.19
Septiembre 68.32 66.52 58.84 52.01 47.65
Octubre 68.15 66.55 58.83 51.96 47.59
Noviembre 68.22 66.29 58.34 51.29 46.75
Diciembre 68.25 66.34 58.17 50.93 46.33
Las configuraciones 4 y 5, considerando el flujo de calor ga-nado y el tamaño del concentrador, se pueden utilizar para generación de energía para aplicaciones en plantas de po-tencia y generación eléctrica. Las configuraciones 2 y 3 se podrían utilizar para generar calor de proceso en industrias y servicios turisticos y/o hospitalarios, mientras que la confi-guración 1 puede servir para calentamiento de agua en casas habitación.
Conclusiones
En el presente trabajo se presentó la descripción y la apli-cación del programa SOLEEC, cuyo principal objetivo es ayudar en el diseño de concentradores solares de canal para-bólico, que también ofrece la opción de conocer información del recurso solar para el lugar donde se pretende instalar el sistema. El programa da la opción de elegir algunos de los materiales más utilizados para la construcción del concentra-dor o se pueden ingresar libremente en el caso de contar con un concentrador ya construído que se desea evaluar. Dentro de las limitaciones del software están la del ángulo de borde que se limita a los 90° y que el fluido de trabajo no presenta cambio de fase.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
142 Enciso Contreras E., Barbosa Saldaña J. G., Gutiérrez Torres C. del C., Quinto Diez P., Jiménez Bernal José A.

Ingeniería Mecánica
El programa proporciona 5 configuraciones basados en el diámetro del tubo absorbedor. Por lo tanto, al obtener los resultados, el usuario elegirá el que mejor se acople a sus ne-cesidades. Las configuraciones 1, 2 y 3 muestran una buena eficiencia térmica y pocas pérdidas hacia el ambiente, aun-que su flujo de calor útil no es tan alto, por lo que se pueden utilizar a pequeña escala como es la generación de calor de proceso para industrias, calentamiento de agua para hos-pitales y hoteles y para agua sanitaria en casas habitación, mientras que las configuraciones 4 y 5 muestran una gran cantidad de calor útil y se pueden utilizar para aplicaciones mayores, como es la generación eléctrica, aunque tienen la desventaja de poseer grandes pérdidas, lo que les afecta di-rectamente en la eficiencia térmica.
Finalmente se puede concluir que a pesar de que el programa SOLEEC es una herramienta útil, versátil y confiable para el diseño de sistemas con concentradores solares PTC, el usuario será el encargado de interpretar los resultados que se muestren y de esta manera decidir sobre la mejor opción para llevar a cabo un proyecto que cubra las necesidades de energía requeridas.
Agradecimientos
Al Consejo Nacional de Ciencia y Tecnología por los apo-yos proporcionado a los estudiantes de posgrado de la SEPI-EZIME Zacatenco.
Referencias
Birnbaum J., Feldhoff J., Fitchner M., Hirsch T., Jöcker M., Pitz-Paal R., and Zimmermann G., “Steam temperature sta-bility in a direct steam generation solar power plant”, Solar Energy Vol 85, 2011, 660 - 668.
Duffie A. J., Beckman A. W., Solar Engineering of Thermal Processes, 3rd edition, John Wiley and Sons, Inc., Wiscon-sin, 2006.
Eck M., Zarza E., “Saturated steam process with direct steam generating parabolic troughs”, Solar Energy, Vol. 80, 2006, 1424 - 1433.
Enciso Contreras E., Desarrollo de un software para el di-seño de concentradores solares de canal parabólico, tesis de maestría, SEPI - ESIME Zacatenco, Instituto Politécnico Nacional, Ciudad de México, 2012.
García-Valladares O., Velázquez N., “Numerical simula-tion of parabolic trough solar collector: Improvement using counter flow concentric circular heat exchangers”, Interna-tional Journal of Heat and Mass Transfer, Vol. 52, 2008, 597 - 609.
Hottel H. C., “A simple Model for estimating the transmittan-ce of direct solar radiation through clear atmospheres”, So-lar Energy, Vol. 18, 1976, 129 - 134.
Incropera F. P., DeWitt D.P., Fundamentals of Heat and Mass Transfer, 6th edition, John Wiley and Sons, New York, 2007.
Kalogirou S., Solar Engineering Processes and Systems, 1st. edition, Elsevier Inc., New York, 2009.
Kalogirou S., Lloyd S., Ward J., “Modelling, optimisation and performance evaluation of a parabolic trough solar co-llector steam generation system”, Solar Energy, Vol. 60, 1997, 49 - 59.
SOLEEC, software de cómputo. Número de registro ante el Registro Público de Derechos de Autor 03-2012-070510302900-01.
143
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 135 - 143
aPlicación Del Software Soleec Para DiSeñar colectoreS SolareS De canal Parabólico

Marzo 2013, Vol. 4
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013)
144

Ingeniería Mecánica
Notation
r.m.s. Root mean square (m/s2)BS British StandardsCF Crest FactorLMS Leuven Measurement SystemsLTM Long-Term Memory PES Perception Enhancement SystemsPSD Power Spectral DensitySTD Standard Deviation
Introduction
The steering wheel is commonly considered the most impor-tant source of haptic feedback information for the automobile driver. This is due to the great sensitivity of the skin tactile receptors of the hand [1] as well as the lack of intermediate structures such as shoes and clothing, which can attenuate
the transmission of vibrational stimuli to the driver. How-ever, the achievement of higher levels of comfort in modern automobiles has sometimes come at the expense of a lack of driver involvement [2]. The issue of driver involvement can become critical in the case of steer by wire systems [3]. Since these systems do not necessarily have a predetermined path, or transfer mechanism, for carrying stimuli to the driv-er. The question of what stimuli should reach the driver has therefore assumed great importance.
People have a notable ability to recognise things and to un-derstand aspects of the current state of the world combining all their sensory systems [4, 5]. Among the sources of the cognitively-relevant information used by automobile drivers, vibrational stimuli help in the understanding of many things, such as: the type of road surface, the presence of water or
145
T.P. Berber-Solano1, J.A. Giacomin2, M. Ajovalasit21Facultad de Ingeniería Mecánica y Eléctrica, Universidad Autónoma de Nuevo LeónAv. Universidad S/N, Ciudad Universitaria, C.P. 66451, Apartado Postal 076 Suc. “F”
San Nicolás de los Garza, N.L., México. 2Brunel University, School of Engineering and Design, Uxbridge, Middlesex, UB8 3PH, United Kingdom.
INGENIERÍA MECÁNICA
TECNOLOGÍA Y DESARROLLO
Resumen
Esta investigación estudia el efecto de la vibración en el volante basado en la detección humana del tipo de carretera, con el fin de identificar que banda de energía es la más utilizada por los conductores para detectar el tipo de superficie de la carretera. Tres superficies de carretera han sido empleadas en el experimento. Cada estímulo de carretera fue manipulado por medio de filtros digitales Butterworth, eliminando cinco bandas de frecuencia del espectro de aceleración lo que se considera una subdivisión importante de la energía de vibración del vehículo. Los resultados sugieren que los mecanismos perceptivos y cognitivos utiliza-dos por los sujetos de prueba requieren información de la vibración que esta contenido en la banda de frecuencias que contiene el nivel de energía más alto. Estos resultados proporcionan una clara indicación de la banda de frecuencia utilizada por los seres humanos para juzgar tipo de superficie de la carretera al conducir automóviles de producción actual. Por lo tanto, cualquier re-ducción de la energía de vibración en el volante en este intervalo de frecuencia podría ser perjudicial para la detección humana, y cualquier otra medida de información que pueden ser desarrollados para el sistema de dirección del automóvil.
Abstract
A laboratory-based experiment was conducted to evaluate the effect of the vibrational energy distribution on the human detection of road surface type by means of steering wheel vibration. The study used steering wheel tangential direction acceleration time histories which had been measured in a mid-sized European automobile that was driven over three different types of road surface. The steering acceleration stimuli were manipulated by means of digital Butterworth filters which were used to eliminate five selected frequency ranges from the steering wheel vibration spectrum in the interval from 0 to 150 Hz. The experiment was per-formed in three parts, one for each road surface studied in which a photograph of one of the three road surfaces was shown. The photograph shown was an image approximately similar to what a driver sees of the road during driving. Fifteen test participants were exposed to both unmanipulated and manipulated steering wheel tangential vibration stimuli, and were asked to indicate, by either “yes” or “no”, whether the actuated acceleration stimulus was from the road surface whose photograph was shown on the board directly in front of the test bench. The findings suggest that the frequency band from 20 to 60 Hz, which is most often as-sociated with specific resonances of the steering system such as the column and tyres, plays a key role in the human detection of road surface type in driving situations.
Vol. 4 No. 4 (2013) 145 - 151
Effect of steering wheel acceleration frequency distribution on detection of road type
Fecha de recepción: 11-12-2012 Fecha de aceptación: 15-02-2013
Palabras clave: Percepción, Información, Detección, Vibración, Volante de automóvil.
Keywords: Perception, information, road detection, vibration, automo-bile steering wheel

Marzo 2013, Vol. 4
the study presented here investigated the effect of vibration energy distribution on the human detection of road surface type. The study was performed by means of laboratory-based experiments involving human participants, and involved digital manipulation of steering wheel tangential accelera-tion signals, which were measured during road testing of a mid-sized European automobile.
Experimental tests of road surface detection
Test Facility
The experiments used tangential direction acceleration time histories measured in a mid-size European saloon automo-bile when driving over three road surfaces using the speeds allowed for the Department of Transport (2006) in the UK for each driving condition. The road surfaces that were mea-. The road surfaces that were mea-sured were a motorway surface, a broken concrete surface and a broken lane surface. Figure 2 presents the three road surfaces, as viewed from directly above, and as seen from a distance as when driving. A 10-second segment extracted from the original acceleration time histories of the three base stimuli are presented in Figure 3, while the global statistical properties determined from the data of each of the road sur-faces are presented in Table 1. The vibration at the steering wheel achieved root mean square (r.m.s.) acceleration values from a minimum of 1.15 m/s2 (for the motorway surface) to a maximum of 2.36 m/s2 (for the broken lane surface). The kurtosis values were close to 3.0, while the skewness values were close to 0.0 suggesting a Gaussian distributed process for the three road surfaces. The broken lane surface had the highest crest factor (CF) at approximately 4.40.
Figure 2: Road surfaces whose stimuli chosen for use in the laboratory test.
snow, tyre slip, and the dynamic states of subsystems such as the engine, the steering and the brakes. When a processed sensory information match with models stored in the long-term memory (LTM) the recognition of an event is taking part [6]. The degree of the match may determine whether the stimulus is interpreted or not, with the consequent interpreta-tion then influencing decision taking.
One means of improving the flow of information to the driver, and thus of making the driving task easier, is to in-corporate a perception enhancement system (PES) into the design of the automobile steering (as shown in Figure 1). Such an electromechanical system would have the function of identifying the significant vibrational stimuli, which origi-nate from the road, the tyres and the suspensions. It would also have the function of transforming the stimuli in order to optimize detection and awareness.
An example of research in this direction is the study by Giacomin and Woo [2], which investigated driver detec-tion of road surface type by measuring the sensitivity of the human detection task to changes in the primary char-acteristics (scale and bandwidth) of the vibration stimuli. Another example of a research in this direction is the study by Berber-Solano and Giacomin [8], which investigated the problem of features [9] in terms of the number and the scale of the transient events.
Recent research [10] has found that an amplification of se-lected time domain features or selected frequency bands of the steering wheel vibration signal facilitates road surface type detection. During driving, steering wheel power spec-tral densities can reach frequencies of up to 350 Hz with vibrational energy mostly present in the range between 10 and 60 Hz [11]. They are typically characterised by low fre-quency excitation in the range from 8 to 20 Hz due to 1st order tyre non-uniformity forces and tyre-wheel unbalance, and due to 2nd order engine and mechanical unbalance in the frequency range from 20 to 200 Hz [12].
In the case of information a scientific question immediately arises: What frequency regions of the vibration spectra are sources of information about the dynamic state of the vehi-cle? Could the elimination of vibration energy have an effect on the detection of surface type? To answer this question,
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No. 4 (2013) 145 - 151
146 Berber-Solano T.P., Giacomin J.A., Ajovalasit M.

Ingeniería Mecánica
Figure 3: 10 second segments which were extracted from the original steering wheel acceleration time histories to create the laboratory test
stimuli.
Table 1: Global statistics of the original three base stimuli used for pro-ducing the laboratory test stimuli
Values Motorway Concrete Lane Broken Lane
r.m.s. (m/s2) 1.15 2.03 2.36
Skewness(dimensionless) 0.20 0.09 -0.01
Kurtosis(dimensionless) 3.49 3.95 3.39
Crest Factor(dimensionless) 3.86 4.49 4.18
Speed (kph) 1.10 50 40
Figure 4 presents the power spectral densities (PSD) of the experimentally acquired steering wheel acceleration signals, along with the frequency bands, which were judged to con-tain the dominant energy features in the overall distribution. These signals were chosen from a large database of steering wheel measurement such that the stimulus data sent con-tained steering vibrations which varied across the following logical categories: road surface typology and energy distri-bution as determined from the power spectral density.
In order to investigate the possible effect of the vibrational energy distribution of the acceleration stimuli on the human cognitive detection of road surface type, individual bands
were eliminated from the overall steering wheel signal. By identifying which bands most inhibited to the human detec-tion task when eliminated it would be possible to isolate the most important energy regions.
Figure 4 : Power spectral densities of the experimentally acquired steeri wheel acceleration signals, along with the frequency regions which were
selected for manipulation.
The selection of the bands to be eliminated was based on the approximate locations of the higher peaks of vibrational energy. The assumption was made that the highest peaks of vibrational energy would most likely have been the re-sult of resonances in the automobile’s systems, and that the elimination of information from one of the most important subsystems might deny the driver an important source of in-formation about the road. Each of the three original steering
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 145 - 151
Effect of steering wheel acceleration frequency distribution on detection of road type 147

Marzo 2013, Vol. 4
wheel time histories was high-pass filtered and band-pass filtered [14] by means of digital Butterworth filters which were constructed in the LMS® TMON software [15] and applied to each original stimulus. Figure 4 presents the five selected frequency ranges from the steering wheel vibration spectrum for each of the original base stimuli. Selected fre-quency ranges are from 0-6, 6-13, 13-27, 27-60 and 60-150 Hz for the motorway stimuli, 0-6, 6-12, 12-27, 27-53 and 53-150 Hz for concrete stimuli and 0-6, 6-9, 9-22, 22-58 and 58-150 Hz for broken lane stimuli. Each band can be con-Each band can be con-sidered an important subdivision of the automobile’s vibra-tional energy, which is dominated by either one, or a small number, of specific frequencies. Energy bands are also asso-ciated with specific automobile subsystems. As an example of the high-pass filtering and band-pass, Figure 5 presents power spectral density (PSD) graphs of the un-manipulated and manipulated motorway stimuli. The r.m.s. acceleration values (m/s2) for the eighteen test stimuli obtained are pre-for the eighteen test stimuli obtained are pre-sented in Table 2.
Test Facility
Figure 6 presents the steering wheel test rig that was used. The vertical system consisted of a 325mm diameter alumin-vertical system consisted of a 325mm diameter alumin-system consisted of a 325mm diameter alumin-alumin-ium wheel, which had an F1 style shape. It was attached to a steel shaft, which was in turn mounted to linear bearings and connected to an electrodynamic shaker. Table 3 presents the main geometric dimensions of the test rig, which were cho-
sen based on data from a small European automobile. The seat was fully adjustable in terms of horizontal position and back-rest inclination as in the original automobile. Vertical vibration was applied by means of a G&W V20 electrody-namic shaker driven by a PA100 amplifier [16].
Figure 6: Steering wheel vertical vibration test facility.
The steering wheel vertical acceleration was measured by means of an Entran EGAS-FS-25 accelerometer attached to the top left side of the wheel. The accelerometer signal was amplified by means of an Entran MSC6 signal conditioning
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No. 4 (2013) 145 - 151
148
Figure 5: Laboratory test stimuli for the Motorway stimuli that were produced by means of digital Butterworth filters.
Table 2: The r.m.s. values (m/s2) of the six base stimuli used for producing the laboratory test stimuli.
Road Surface Type Original
1st Highenergy
frequencyrange
eliminated
2nd Highenergy
frequencyrange
eliminated
3rd Highenergy
frequencyrange
eliminated
4th Highenergy
frequencyrange
eliminated
5th Highenergy
frequencyrange
eliminated
Motorway (M) 1.15 1.09 1.07 1.04 0.83 0.99
Concrete (C) 2.03 1.91 1.87 1.73 1.26 1.83
Broken Lane (BL) 2.36 2.13 2.50 1.88 1.95 2.42
Berber-Solano T.P., Giacomin J.A., Ajovalasit M.

Ingeniería Mecánica
unit [17]. Vibration control and data acquisition was per-formed by means of the LMS® TMON software [15] system coupled to a DIFA SCADASIII electronic front-end unit. The safety features of the rig and the acceleration levels used conform to the health and safety recommendations outlined by British Standards Institution BS 7085 (1989).
Table 3: Geometric dimensions of the steering wheel vertical vibration test ring.
Geometric Parameter Value
Steering column angle (H18) 23o
Steering wheel hub centre height above floor (H17) 770 mm
Steering wheel diameter (W9) 324 mm
Steering wheel tube diameter 25 mm
Horizontal distance from H point to steering wheel hub centre (d=L11-L53) 390-450 mm
Seat H point height from floor (H30) 310 mm
Test Subjects
Fifteen university staff and students participated in the labo-ratory experiments (8 males and 7 females). All participants tested were requested to be experienced drivers. A consent form and a short questionnaire were presented to each par-ticipant prior to testing and information was gathered regard-ing their anthropometry and health. The mean age for the group was 28.13 years (STD= 4.5), while the mean height was 1.69 cm (STD= 0.067) and the mean mass was 71.9 kg (STD= 7.8). The mean values and the standard deviation of the height and weight of the test participants were near the 50 percentile values for the U.K. population [19] except in the case of age, which was somewhat lower than the UK national statistics. No test participant declared a physical or a cognitive condition which might affect the perception of hand-arm vibration. All subjects declared themselves to be in good physical and mental health and none declared having smoked or ingested coffee prior to arriving in the laboratory. All had more than two years of driving experience.
Test Protocol
Upon arriving in the laboratory, each subject was asked to sit in the test bench and to adjust the seat so as to achieve a re-alistic driving posture. He or she was then asked to look at on a board directly in front of the bench, which displayed a picture of a road surface. Before commencing testing, each participant was asked to remove any articles of heavy cloth-ing such as coats, and to remove watches or jewellery. He or she was asked to sit in the test rig and to adjust the seat so as to achieve a realistic driving posture. Since grip type and grip strength [20] are known to effect the transmission of vibra-[20] are known to effect the transmission of vibra- are known to effect the transmission of vibra-tion to the hand-arm system, the participants were asked to maintain a constant palm grip on the steering wheel using both hands. The participants were also asked to wear ear protec-tors to avoid any auditory cues [5]. Room temperature was maintained within the range from 20°C to 25°C so as to avoid significant environmental effects on the skin sensitivity [21].
The detection task was to state, by means of “yes” or “no”, whether each vibration stimulus that was actuated during the course of the experiment was from the road surface that
was illustrated by the picture. When the actuated vibration had been produced using the base stimuli from the displayed road surface, the response was taken to be a correct detec-tion. False alarms, on the other hand, were taken to be those situations when the participant responded “yes” to a stimulus which was not derived from the displayed road surface. No feedback was provided to the test participant.
Three laboratory experiments were performed. In the three experiments the test stimuli consisted of 3 repetitions of each of the 5 band-pass filtered stimuli and of the original base stimuli for each type of road. Each participant performed 18 identifications for each road type, and a total of 54 identifica-tions in a complete experiment. Each stimulus was separated from each other stimulus by a 5 second gap in which the par- stimulus by a 5 second gap in which the par-ticipant was asked to state his/her judgment of road surface type. The order of stimuli presentation was fully randomised for each participant in each experiment.
Results
Figure 7 presents the results obtained from the experiment in terms of percent correct detection (from 0 to 100 percent). De-tection rate is presented along the ordinate while the five dif-ferent frequency ranges for each road are presented along the abscissa. The original base stimuli are labelled as O. For each frequency range, the hit rate was taken to be the proportion of “yes” responses obtained from the stimuli which were actually from the presented road surface. The false alarm rate was taken to be the proportion of “yes” responses obtained from the stim-uli which were not derived from the road surface which was be-ing presented. The percentage of correct detection responses for the three road surfaces were analysed in a between/within-sub-jects by means of the one factor repeated measures ANOVA. Statistical significance effect in the responses were found in all surfaces tested at a p=0.01 of significance level.
As shown in Figure 7 the percentage of correct detection for the original base stimuli was approximately 58% for the motorway stimuli, 86% for the concrete stimuli and 90% for the broken lane stimuli. The curves of correct detection for the concrete and bro-ken lane stimuli presented in Figure 7 showed similar qualitative behaviour, achieving their optimal detection at the original base stimuli (O), then decreasing in detection until the elimination of the frequency range from 27Hz to 53Hz for the concrete stimuli and from 22Hz to 58Hz for the broken lane stimuli. Qualitatively, the results from the motorway steering stimuli showed a very dif-ferent behaviour from that of the other two test stimuli, suggest-ing important differences in the underlying energy content.
Results suggest that the LTM model used by average drivers to judge all three road surface types contains information at the fre-quency range approximately from 20 to 60Hz. The results suggest that this frequency range where the automobile has its column reso-nances, steering wheel resonances and chassis resonances seems critical to detection. Elimination of vibrational energy in the range from approximately 20 to 60 Hz made it almost impossible to cor-rectly detect broken surfaces (concrete and asphalt lane) while it dramatically improved detection of the smooth surface (motor-way). Clearly, the energy in this band is very important towards determining the surface type
149
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 145 - 151
Effect of steering wheel acceleration frequency distribution on detection of road type

Marzo 2013, Vol. 4
Figure 7: Results of the laboratory experiments regarding the effect of the elimination of vibrational energy on the human detection of road surface type.
Discussion
The detection rate of less than 100 percent for all three road surface types suggests the difficulty of achieving fully ac-curate detection in a laboratory task in which several key stimuli, notably the acoustical stimuli, are absent. Not with-standing the less than perfect environmental reproduction, the current results suggest that the frequency range from ap-proximately 20 Hz until 60 Hz played a key role in the hu-man cognitive detection of the road surface type for all three surfaces. The current results show some qualitative simi-larities to previous bandwidth experiments [2, 10] in which
the elimination of high frequency energy from the steering wheel vibration signal was found to have a detrimental effect on road surface type detection. The authors of the previous study stated that the LTM model used by average drivers to judge road surface type appeared to contain information to oscillatory frequencies in excess of 60 Hz. The current results suggest that the elimination of the energy contained in the frequency band from 20 to 60 Hz increases the road detection of the types of roads which contain little energy in the band, but decrease the road detection of the types of roads which contain significant energy in the band.
Considering no a-priori knowledge of the possible meaning of the vibration energy in the 20 to 60 Hz band, it would ap-pear from the results that eliminating one of the frequency bands which contains the greatest amount of vibration ener-gy in current production automobiles can be said to deprive the driver an important source of driving information, and thus an important source of steering feel.
A-prior information about this frequency band includes, however, the knowledge that it normally contains more than one resonance of the steering system (tyres, front suspen-sions, steering column, steering wheel, etc.) thus elimination of this band would appear to remove important feedback to the driver about the dynamic state of those subsystems. Given the resonance behaviours of the automobile in the 20 to 60 Hz frequency band, it may be the case that in current production automobiles the frequency band provides a focus and a principal source of driver perception.
Conclusion
This study performed three tests in which human subjects were exposed to vertical steering wheel vibration stimuli in a laboratory test rig from three different road surfaces. The objective was to establish if the elimination of vibrational energy in any of the main energy regions from 0 to 150 Hz might affect the human detection of road surface type. Five frequency bands from the steering wheel vibration spectrum were selected for each road surface stimulus. The findings suggest that the elimination of vibrational energy in the fre-quency band from 20 to 60 Hz can be highly detrimental to human detection of road surface type. The findings may be interpreted as suggesting that road surface, steering and suspension in the 20 to 60 Hz frequency band provide vital clues to automobile drivers regarding the roads over which they drive and the dynamic response of the vehicle. Steering feel may be compromised by any reductions in vibrational energy at the steering wheel in this band.
Acknowledgements
The authors would like to thank the CONACyT for their eco-nomic support of the research.
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No. 4 (2013) 145 - 151
150 Berber-Solano T.P., Giacomin J.A., Ajovalasit M.

Ingeniería Mecánica
References
1. Lee, S. I. Human sensitivity responses to vibrotac-tile stimulation on the hand: measurement of absolute thresholds. J. Ergonomics Soc. South Korea, 1998, 17(2): p. 1–10.
2. Giacomin, J. and Woo, Y.J. A study of the human abil-ity to detect road surface type base on steering wheel vibration feedback, Submitted to The Proceedings of the IMechE, Part D - Journal of Automobile Engineering, 2004.
3. Jurgen, R. K. Electronic Steering and Suspensions Sys-tems, S.A.E. International, Warrendale Pennsylvania, 1999.
4. Atkinson, R. C. and Shiffrin, R. M. Human memory: A proposed system and its control processes. In press on the psychology of learning and motivation: Advances in research and theory. New York: Academic Press, by K.W. Spence, 1968.
5. Bregman, A.S. Auditory Scene Analysis: The Percep-tual Organization of Sound. MIT Press, 1999.
6. Miller, G. A. The magical number seven, plus or minus two: Some limits of our capacity for processing infor-mation. Psychological Review, 1956, 63, 81-97.
7. Giacomin, J. and Woo, Y.J. Beyond comfort: informa-tion content and perception enhancement, Engineering Integrity, 2004, Vol. 16 (July), 8-16.
8. Berber-Solano, T. P. and Giacomin, J.A. Perception enhancement system for automotive steering, Annual Conference of the European Association of Cognitive Ergonomics (EACE 2005), Chania, Crete, Greece, Sept. 29 to Oct. 1.
9. Giacomin, J. Perception enhancement for steer-by-wire systems, ATA Ingegneria dell’ Automobile, Vol. 58, No 8/9, Sept-Oct, 2005.
10. Berber-Solano, T. P., Ajovalasit, M., Giacomin, J. Fa-cilitating the driver detection of road surface type by selective manipulation of the steering wheel accelera-tion signal. Proceedings of the IMechE, Part D - Journal of Automobile Engineering, 2010, Vol. 224, pp. 1321-1333.
11. Fujikawa, K. Analysis of steering column vibration.Mo-tion & Control, 1998, 4, 37-41.
12. Ajovalasit, M. and Giacomin, J. Analysis of variations in diesel engine idle vibration. Proceeding of the Institu-tion of Mechanical Engineers Part D, 2003, 217, 921-933.
13. Department of Transport. Speed Leaflet 2006. http://www.dft.gov.uk.
14. Hamming, R. W. Digital filters, 3rd Ed., Prentice Hall signal processing series, c1989.
15. LMS International. LMS Cada-X Fourier Monitor Man-LMS Cada-X Fourier Monitor Man-ual. Revision 3.5E, 2002. Leuvan.
16. Gearing & Watson Electronics Ltd. Manual of G&W V20 electrodynamic shaker, 1995.
17. Entran Devices Inc. Manual of Entran MSC6, 1991.
18. British Standards Institution. Safety aspects of experi-ments in which people are exposed to mechanical vibra- mechanical vibra-mechanical vibra-tion and shock. BS 7085, 1989. London.
19. Pheasant, S. and Haslegrave, C.M. Bodyspace: An-thropometry, Ergonomics and the Design of work, 3rd Edition,U.S.A., Taylor & Francis, 2005.
20. Reynolds, D.D. and Keith, R.H., Hand-arm vibration, Part 1: Analytical model of the vibration response char-acteristics of the hand. Journal of Sound and Vibration, 1977. 51(2): p. 237-253.
21. International Organization for Standardization. Me-chanical Vibration - Measurement and assessment of human exposure to hand-transmitted vibration - Part 1: General guidelines. ISO 5349-1, 2001. Geneva.
151Effect of steering wheel acceleration frequency distribution on detection of road type
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol.4 No.4 (2013) 145 - 151

Marzo 2013, Vol. 4
INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO Vol. 4 No. 3 (2012)
152

INSTRUCCIONES PARA LOS AUTORESLa revista Ingeniería Mecánica, Tecnología y Desarrollo invita a profesionales de la Ingeniería Mecánica y a las personas interesadas en este campo del conocimiento a colaborar con artículos téc-nicos, originales e inéditos, de alguna de las siguientes áreas:
Diseño y ManufacturaMecánica experimentalMecánica teóricaFluidos y TérmicaOtros temas afines
Las normas que deben seguir para la presentación de los trabajos son las siguientes:
PREPARACIÓN DEL ARTÍCULO
IDIOMAS OFICIALES: Los artículos se podrán recibir tanto en inglés como en españolTÍTULO. El título deberá informar acerca del contenido del trabajo, y no debe exceder 12 palabras. Se presenta encabezando el trabajo.AUTOR (ES). Después del título se anotará el nombre completo del autor o autores y su filiación. En una hoja anexa se proporcionarán los siguientes datos: nombre, grado, categoría o puesto, institución, departamento, dirección, teléfono, fax y correo electrónico. No se debe imprimir en cada una de las hojas del artículo (encabezados o pies de página) el nombre del autor o autores. RESUMEN. Deberá ser conciso y proporcionar un amplio panorama de la investigación (problema, objetivo, método, resultados y conclusiones), sin que sobrepase las 250 palabras. ABSTRACT. Se debe contar con un resumen en inglés con una extensión máxima de 250 palabrasPALABRAS CLAVE. Se debe proporcionar una relación de cinco palabras o frases clave redactadas en inglés y en español, para facilitar la búsqueda en bancos de información. PIES DE PÁGINA. No se admiten. Las notas o citas deberán incorporarse al texto. ILUSTRACIONES. Deben ser claras con el suficiente nivel de nitidez y dimensiones para su fácil inter-pretación. Las ilustraciones pueden ser figuras, gráficas, fotografías, tablas, diagramas, cuadros, etc. Deberán ser numeradas progresivamente en el orden en que sean mencionadas en el texto, y deben estar insertadas en la parte que les corresponda dentro del artículo.EXPRESIONES MATEMÁTICAS. Deberán ser escritas claramente, cuidando que sea entendible la dife-renciación entre símbolos.EXTENSIÓN y FORMATO. El documento para revisión no deberá exceder de veinticinco páginas, incluyendo ilustraciones. El texto se debe presentar a doble espacio en letra Times New Roman de 12 puntos. Los márgenes deberán ser de 3 cm. por cada lado.REFERENCIAS. Se citarán las referencias de la literatura utilizada para elaborar el documento, por el apellido del autor y fecha entre paréntesis, por ejemplo (Basar, 2000). Deberán ordenarse alfabética-mente, por apellido, asegurándose que estén completas. Las referencias se deberán presentar en la siguiente forma: LibroApellido del autor, nombre, título del libro en mayúsculas y minúsculas y en cursivas, editor, edición, casa editorial, ciudad (sólo se agrega el país si existe confusión o no se sabe a ciencia cierta en donde se ubica tal ciudad), fecha, páginas. Artículo en revista Apellido del autor, nombre, título del artículo en mayúsculas y minúsculas entrecomillado, nombre de la revista en cursivas, año, volumen, número, mes o meses, ciudad (solo se agrega el país si existe confusión o no se sabe a ciencia cierta en donde se ubica tal ciudad), fecha, páginas. Informe técnico Apellido del autor, nombre, título del informe en mayúsculas y minúsculas y en cursivas, la frase «informe técnico», siglas de agencia u organización, ciudad (solo se agrega el país si existe confusión o no se sabe a ciencia cierta en donde se ubica tal ciudad), fecha, páginas. Congreso Apellido del autor, nombre, título de la ponencia en mayúsculas y minúsculas y en cursivas, nombre del congreso, fecha en que se llevó a cabo, ciudad (solo se agrega el país si existe confusión o no se sabe a ciencia cierta en donde se ubica tal ciudad).

Tesis Apellido del autor, nombre, título de la tésis en mayúsculas y minúsculas y en cursivas, la frase «tesis de...», centro de educación superior, ciudad (sólo se agrega el país si existe confusión o no se sabe a ciencia cierta en donde se ubica tal ciudad), fecha, páginas.
CONTENIDO. El artículo deberá presentar aportes significativos al campo de acción de la Ingeniería Mecánica; se podrán presentar trabajos terminados o que hayan cumplido alguna etapa de su ciclo de desarrollo; y estarán respaldados por una revisión bibliográfica adecuada. Las secciones y subseccio-nes deberán estar claramente diferenciadas y no numeradas. La estructura básica del artículo deberá seguir el siguiente orden: Título, abstract, resumen, nomenclatura, introducción (deberá explicar la naturaleza y propósito del trabajo), el desarrollo (contendrá el mensaje principal del artículo or-denado de manera lógica y sencilla e integrado por subsecciones) y conclusiones (aportaciones del trabajo, alcances, limitaciones y aplicaciones). Posteriormente se presentan agradecimientos (breves y concisos), referencias y apéndices. Envío del artículoEl artículo debe ser escrito en procesador de palabras Word. Para obtener una mayor calidad de im-presión, las ilustraciones se recibirán en formato TIFF o eps, con una resolución de 300 dpi. Estás deberán estar insertadas en el lugar que les corresponde dentro del texto, pero es muy importante que también se anexen en archivos magnéticos (1 archivo por cada ilustración). Los artículos podrán ser enviados en cualquiera de las dos siguientes formas:
- Por correo electrónico Los archivos del trabajo e ilustraciones serán enviados a la siguiente dirección:[email protected]
- Por correo ordinarioDeberán enviarse 3 copias a doble espacio y en tamaño carta al Dr. Francisco Solorio Ordaz, editor de la revista Ingeniería Mecánica, Tecnología y Desarrollo, a la siguiente dirección: Departamento de Termoenergía, Facultad de Ingeniería UNAM, Ciudad Universitaria, 04510, Coyoacán, México D. F. El artículo se enviará en diskette de 3 ½ o en CD. Es importante que la etiqueta del disco contenga el nombre del autor o autores, y la versión del procesador. El archivo deberá corresponder a la impresión enviada.
- Por Internet: http://www.revistasomim.net
INFORMACIÓN GENERALRecibido el material, se enviará notificación de recepción.Proceso de arbitrajeEn este proceso participan reconocidos especialistas de alto nivel con la capacidad de identificar ampliamente la literatura relevante publicada en su ámbito profesional, así como con la habilidad para evaluar, de manera confiable y expedita, tanto el grado de novedad como el mérito de contenido.Los artículos serán revisados por 3 árbitros, quienes los evaluarán siguiendo criterios de calidad, originalidad y relevancia; y darán su opinión sobre su publicación. Únicamente se requerirá de un cuarto revisor cuando los dictámenes se contrapongan o resulten poco consistentes. El proceso de arbitraje se desarrollará de tal manera que tanto los autores como los revisores no conozcan el nombre de su contraparte. De acuerdo con las opiniones de los árbitros el Comité Editorial notificará a los autores el resultado de la evaluación, existiendo 4 posibilidades
· Su aceptación · Su aceptación con cambios menores · Su aceptación con cambios mayores · Su rechazo
Pruebas de galeraLos autores recibirán las pruebas de galera, forma de autoría, aprobación de sobretiros y cesión de derechos de autor. Con base en las pruebas de galera los autores deberán realizar la revisión final del documento para así proceder a su publicación.SobretirosPor cada artículo se tendrá derecho a 10 ejemplares de la revista en forma gratuita.

CONVOCATORIA
La Sociedad Mexicana de Ingeniería Mecánica convoca a su XIX Congreso Internacional Anual, a celebrarse los días 25, 26 y 27 de septiembre de 2013 en la Ciudad de Pachuca, Hidalgo, México.
Sede: Instituto Tecnológico de Pachuca
Límite para la recepción de artículos:12 de mayo de 2013
Temas
Los temas a compartir son:• Diseño Mecánico• Termofluidos• Mecánica teórica• Robótica• Mecanismos• Automatización• Materiales• Procesos de manufactura• Educación en ingeniería• yáreasafines
Los trabajos deberán presentar resultados sobre in-vestigaciones, desarrollos e innovaciones tecnológicas que representen un aporte a la Ingeniería Mecánica.
Recepción de artículos
Para registrar su(s) artículo(s) ponemos a su disposi-ción el Sistema de Registro de Artículos de la SOMIM al cual puede ingresar a partir de la página Web de la SOMIM
BASES
Los artículos deberán tener una extensión máxima de 10cuartillasincluyendotextoadoblecolumna,figuras,tablas, nomenclatura y apéndices. Se podrán presen-tar en los siguientes idiomas: español, portugués o in-glés. Deberán ser elaborados con tipo de letra Times New Roman tamaño 10 y enviados en formato pdf in-cluyendo los siguientes apartados:
1. Titulo del trabajo (10 palabras máximo).2. Para registro del artículo no deberá contener nom-
bre de los autores (El nombre deberá incluirse sólo en la versión final del artículopreviamenteapro-bada por el Comité de la Arbitraje del Congreso), direcciones y correos electrónicos.
3. Resumen (150 palabras máximo en español).4. Abstract (150 palabras máximo en inglés).5. Nomenclatura.6. Introducción.7. Cuerpo del trabajo.8. Conclusiones.9. Reconocimientos (opcional).10. Referencias.11. Apéndices (opcional).
Los mejores trabajos serán sometidos al arbitraje adi-cional del comité editorial de la revista SOMIM “Inge-niería Mecánica, Tecnología y Desarrollo” para su pu-blicación en los números correspondientes al periodo 2013-2014.
Notificación de los autores (junto con las indicacio-nesparalapreparacióndelaversiónfinal):16deJuniode 2013.
Recepción de la versión final:21deJuliode2013
Mayores informes en: www.somim.org.mx
Instituto Tecnológico de Pachuca
VinculaciónInnovacióne
Soluciones para elavance tecnológico

La solicitud para ingreso a SOMIM se encuentra abierta a todos los profesionales, educadores y estudiantes que satisfagan los requisitos correspondientes a alguna categoría.
La afiliación a la SOMIM no únicamente lo mantendrá en contacto con profesionales lideres en el campo de la Ingeniería Mecánica y con nuevos desarrollos en campos relacionados, sino que le proporcionará un espacio en el cual pueda mostrar habilidad técnica y de organización.
REQUISITOS DE ADMISIÓN
El solicitante debe estar activo en el área de Ingeniería Mecánica en el momento de su admi-sión, ya sea en la investigación y docencia o en el ejercicio profesional.
Para miembro titular
Se requiere :
1. Tener un titulo profesional en Ingeniería Mecánica o equivalente, o bien presentar los documentos que acrediten una aportación significativa a la Ingeniería Mecánica.
2. Haber estado activo en el ejercicio de la profesión durante los cinco años previos a su admisión.
Para miembro asociado
Se requiere:
Tener un titulo profesional en Ingeniería Mecánica o Equivalente, o bien presentar los docu-mentos que acrediten una aportación significativa a la Ingeniería Mecánica.
Para miembro estudiante
Se requiere:
Estar matriculado como estudiante en el área de Ingeniería Mecánica, en un programa de estudios de licenciatura reconocido por la SOMIM para este fin. Dicha reconocimiento se llevará a cabo por un comité ad hoc designado por el presidente.
FORMATO DE INSCRIPCIÓNSi usted desea afiliarse a la SOMIM visite la página:
http://www.somim.org.mx/
SOCIEDAD MEXICANA DE INGENIERÍA MECÁNICA A.C. (SOMIM)
SOLICITUD DE INGRESO

Campos del Conocimiento
Mayo 2003, Vol.1
Para el Programa de Doctorado, además de lo señalado, se requiere
Requisitos mínimos para el Programa de Maestría en Ingeniería
Para mayores informes; consulta la página electrónica:http://ingenieria.posgrado.unam.mx
El campo de conocimiento de Ingeniería Mecánica del Programa de Maestría y Doctorado en Ingeniería de la UNAM cuenta con ocho campos disciplinarios: Diseño Mecánico, Mecánica Aplicada, Metalmecánica, Termofluidos, Mecatrónica e Ingeniería Automotríz. Se sustenta en las áreas afines de desarrollo académico de las siguientes entidades de la UNAM: Facultad de Ingeniería, Instituto de Ingeniería, Centro de Ciencias Aplicadas y
Desarrollo Tecnológico, Centro de Investig-ación en Energía y la Facultad de Estudios Superiores Aragón. Su princi-pal objetivo es formar académicos y profesionales del más alto nivel en Ingeniería Mecánica, que contribuyan a la solución de problemas nacionales, mediante la generación de nuevos conocimientos, métodos y criterios de
ingeniería, así como con el desarrollo de tecnología.
La Secretaría de Posgrado e Investigación de la Facultad de Ingeniería de la UNAM invita a los interesados en el campo de Ingeniería Mecánica con estudios de licenciatura y maestría, provenientes de Instituciones de
Educación Superior nacionales o extranjeras, a continuar sus estudios de posgrado en la UNAM
• Poseer un título en una licenciatura en el área de las Ciencias Físico Matemáticas y de las Ingenierías.
• Presentar y aprobar un examen de conocimientos y otro de aptitudes.
• Presentarse a una entrevista con el Subcomité de Admisión (SA).
• Presentarse a una entrevista con el Subcomité Académico por Campo de Conocimiento (SACC), previa al proceso de ingreso a fin de orientar al alumno en el campo de conocimiento y en el disciplinario, y otra después de los exámenes de ingreso.
• Demostrar la comprensión de un idioma diferente del español, de entre los señalados en las normas operativas.
• Demostrar un conocimiento suficiente del idioma español, cuando éste no sea la lengua materna del aspirante.
• Establecer el compromiso de dedicar tiempo completo a los estudios de maestría. En casos excepcionales debidamente justificados, el Comité Académico (CA) podrá admitir alumnos de tiempo parcial.
• Poseer el grado de maestro en ingeniería o en cualquier otra maestría afín en el área de las Ciencias Físico Matemáticas y de las Ingenierías
• Ser propuesto por escrito por un profesor o investigador acreditado como tutor de doctorado que acepta ser su tutor principal.• Ser recomendado para ingresar al doctorado, por el Subcomité de Admisión y el Subcomité Académico por Campo de Conocimiento.
• Se recomienda revisar en las Normas Operativas los requisi-tos adicionales para las diferentes modalidades de ingreso, así como los aspectos propios del proceso de ingreso que aparecen en otros apartados de esta.
El doctorado se realiza mediante un trabajo de investigación que se define desde el ingreso al programa, y puede ser complemen-tado con temas selectos, asignaturas y otras actividades académicas que se impartan en cualquier programa de estudios de la UNAM u otra universidad, a criterio del tutor y del comité tutoral del alumno.

Esta obra se terminó de imprimir en el mes de marzo de 2013.
Se imprimieron 1,000 ejemplares mássobrantes de reposición.

CONSEJO DIRECTIVO DE LA SOMIM 2012-2014
DR. HECTOR PLASCENCIA [email protected]
DR. JOSÉ MANUEL RIESCO Á[email protected]
DR. ELIAS RIGOBERTO LEDESMA [email protected]
DR. SAÚL DANIEL SANTILLÁN GUTIÉRREZ [email protected]
DRA. MAGDALENA TRUJILLO BARRAGÁ[email protected]
DR. ANDRÉS LÓPEZ VELÁZQUEZ [email protected]
Dr. LEOPOLDO GONZÁLEZ GONZÁ[email protected]
DR. ARTURO BARBA PINGARRÓ[email protected]
DR. VICTOR HUGO RANGEL HERNÁ[email protected]
Dr. ADRIÁN ESPINOSA [email protected]
Presidente
Vicepresidente de Termofluidos
Vicepresidente de Mecánica Teórica
Vicepresidente de Diseño Mecánico
Vicepresidente de Manufactura y Materiales
Secretario
Tesorero
Vocal de educación
Vocal de asuntos estudiantiles
Vocal de difusión

VinculaciónInnovacióne
Soluciones para elavance tecnológico
Congreso Internacional Anual de
Ingeniería MecánicaXIX
25, 26 y 27 de septiembre de 2013
Pachuca, Hidalgo
Información:www.somim.org.mx
www.itpachuca.edu.mx
Organizan:SOMIM
Sociedad Mexicana de Ingeniería Mecánica
Instituto Tecnológico de Pachuca
Recepción de trabajos mayo 12 de 2013
Notificación a los autores junio 16 de 2013
Recepción de artículos definitivos julio 21de 2013
Temas:Diseño Mecánico
TermofluidosMecánica teórica
Robótica Mecanismos
Automatización Materiales
Procesos de manufactura Educación en ingeniería
y áreas afines
Dirigido a:
Estudiantese Industriales
Profesionales, Investigadores Docentes,
CONACYT
Frag
men
to d
el m
ural
: “La
ave
ntur
a de
la c
ienc
ia”
Aut
or: J
orge
Lui
s D
omín
guez
Che
quer