Embed Size (px)
Citation preview

11© 2020 Xylem
SonTek RiverSurveyor-M9 リバーサーベイヤーM9システムリバーサーベイヤーM9システム 3次元超音波ドップラー流向流速分布・流量/水底地形探査装置
河川・水路・水域調査のイノベーション
RiverSurveyor-M9 システムは、ドップラーメソッドによる3次元流向流速分布・ 流量計測に加え、トータル5素子
(スワフ50°)による深浅測量が可能です。 特に深浅測量では機器の傾斜・揺動補正および時空間的音速補正により、 極めて高精度な水底地形探査を実現します。
センサーの傾斜・揺動の状態をリアルタイムにモニターし、測地点座標及び 測深値への補正を行う機能を有します。また、標準添付のソフトウェアにより、リアルタイムに等深浅図、3Dグラフィッ ク地形の作図を可能とします。
更に運用方法に応じて、KATANA動力アッタチメント付ハイドロボードⅡ、ハイ ドロボード曳航体、舷側固定冶具などのプラットフォームをご選択できます。
RiverSurveyor-M9 RiverSurveyor-M9 (型式RS-M9)(型式RS-M9)
0.5MHz垂直ビーム (水深計測)
4つの3.0MHzビーム 水深&流速検知
4つの1.0MHzビーム 水深&流速検知

22© 2020 Xylem
深浅測量 左)リアルタイムでグリッド処理と等深浅区作成
右)クリック1回で3次元地形グラフィック
3次元流速計測、正確な地形調査、流量計算を 同時に実施
河川横断による,河床地形取得と流量観測
特徴 効果
水深計測用鉛直ビームの搭載 ボトムの断面形状のより正確な把握と、より広い面積での流速計測
周波数自動切り替え 高い解像度とより幅広い水深への対応を可能にするため、2種類の周波数の音波を 自動的に選択、切り替えを行います。
パルスタイプの自動設定 音波のパルスタイプ(コヒーレント、パルス・コヒーレント)モードを自動で切り替えるこ とにより、状況に応じ適切な計測方法を選択
流速動態観測と深浅測量への ハイブリッド運用が可能
HydroSurveyor-M9は流速動態観測と同時に、トータル5素子(スワフ50°)による 深浅測量が可能であり、機器の傾斜・揺動補正に加え、時空間的音速補正も可能で あり、極めて高精度な水底地形探査を実現します
コンパス・二軸傾斜計 標準装備 計測時の装置の向きや傾き補正を流速及び測深値に対して適用
最適なピングレートの選択 ピングレート(音波発射頻度)の最適化、データを高精度化(最大70Hz)。
RTK-GPS 機器位置座標は高精度RTKGPSとのシステム連動にてリアルタイム取得。
ボトムトラック GPSを使用することな<、装置の移動状況と水深を正確に把握します。

33© 2020 Xylem
1 River Surveyor-M9:型式RS-M9 River Surveyor M9 Systemの超音波発信センサー 本体部となります。
2 3 4 RTK-GPS型PCMモデュール:型式PCM-RTK RTK-GPSタイプのPCMモデュールは、②③④) 構成されます。 ② ローバ側PCMモデュール(GPS/電源/通信) RTKGPSモデュールを
内蔵し、また2.4GHz無線によりPCとの遠隔データ通 信を行い、PC上でリアルタイムにデータの確認が可能です。
③ ローバー側GPSアンテナ ④ RTK GPSベース側PCMモデュール(トライポッド付属)
* DG P SタイプのPCMモデュールには、④は含まれません
KATANA動力アタッチメント付 ハイドロボードII ハイドロボードII浮体
舷側艤装治具
⑤ 専用ソフトウエア 流量・流況解析ソフトウェア (River Surveyor Live / 標準) 深浅測量・流況ソフトウェア (HydroSurveyor-M9 /オプション)
⑥ CastAway(型式CastaWay-CTD)(オプション) 超音波の水中音速の補正器であり、特に深浅測量精度の向上には 不可欠なシステムコンポーネントとなります。
⑦ ラジコンノ自律航行動力アッタチメント:型式KATANA (オプション) KATANAを取付けることにより、ハイドロボードⅡを動力船として使用可能です。ラジコン、または予めGPS座標によるウェイポイントの設定により自律航行することも可能です。
1
4 6
2
44 77
3322
RiverSurveyor-M9 システムコンポーネント

44© 2020 Xylem
● 1台3役!! 流量観測/流況分布/深浅測量 ソフトウェアを使い分けることにより、ハードウェア性能を最大限に引出します。 多目的な計測運用が可能で、機器稼働率を高めます
RiverSurveyor Live (標準添付ソフト)
RiverSurveyor M9
CastAway CTD
GPS
HydroSurveyor(オプションソフト)
● 音速補正による高精度化 CastAway-CTD (水温・塩分プロファイラ)で得られる水中音速プロファイルにより、時空間的に補正処理を施し、取得データの高精度化を実現
流量観測・流況断面調査 深浅測量・流況調査
・ 流量 ・ 3次元流況 ・ 断面地形
・ 3次元地形 ・ 3次元流況
水温・電導度鉛直分布 塩分・密度・音速鉛直分布
音速補正機能による 高精度化を実現
M9の多目的運用 及び 時空間的音速補正によ る計測の高精度化‼

55© 2020 Xylem
3次元断面における流速・地形計測から流量計算をリアルタイムに実施、不感領域における流量も、実証済みの水理公式(Chen' s Power Law)により外挿補完します。
河口域成層流(塩水楔)解析
ソフトウェア画面
塩水遡上による成層流のデータ取得例です。約1.6m程度の水深をセル 層厚0.05mの高解像で分割。成層境界を極めて明瞭に捉えています。
Chen’s Equation - 1/6 Power Law
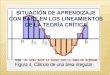
流量観測結果一覧
River Surveyor Liveによる流量観測では 境界領域Left/Right 及び不感領 域Top/Bottom における流量は、Chenの指数則により自動的に外挿補完が行われます。 上表では、2 回の観測を行った結果であ り、トータル流量の変動誤差は、1%以内(COV)で推移しており、極めて高い再現性が得られていることが判ります。
Transect File nameStart Edge
Start Date Start Time Duration
Temp (ºC)
Track (m)
DMG (m)
Width (m)
Area (m2)
Boat Speed (ms)
Mean Speed (ms)
Left Q (m3/s)
Right Q (m3/s)
Top Q (m3/s)
Middle Q
(m3/s)
Bottom Q
(m3/s)Total Q (m3/s)
Measured (%)
1 20111018140614rtv Right Bank 10/18/2011 2:06:15 PM 0:04:53 19.9 24.54 19.39 21.39 10.6 0.064 0.621 0.04 0.09 1.53 4.02 0.88 6.555 61.3
2 20111018140607rtv Left Bank 10/18/2011 2:16:08 PM 0:06:22 19.1 27.77 19.48 21.48 10.2 0.055 0.649 0.03 0.08 1.58 4.11 0.85 6.648 61.8
Mean 0:06:37 19.5 26.16 19.44 21.44 10.4 0.07 0.635 0.04 0.09 1.55 4.06 0.87 6.601 61.5
Std Dev 0:01:45 04 1.62 0.05 0.05 0.2 0.014 0.014 0 0.01 0.02 0.06 0.02 0.046 0.3
COV 0 0 0.062 0.002 0.002 0.016 0.204 0.023 0.053 0.066 0.015 0.011 0.018 0.007 0.004
River Surveyor Live 流量観測・流況解析ソフトウエア
潮汐による河川流速分布の挙動解析

66© 2020 Xylem
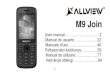
トータル5素子(スワフ50°)による深浅測量が可能で、機器の傾斜・揺動補正および時空間的音速補正により、極めて高精度な水底地形探査を 実現します。また同時に流速マッピングも行い、全てのデータ要素に対して、HydroSurveyor-M9 ソフトウェア上のGIS機能によりレイヤリング処理が可能です。
スワフ 50°より5点の測深点は、概ね水深と等しい直径の円周上と円心に位置する
サロマ湖外海接続部 各水深の流速マッピング
17:10
17:15
17:28
17:34
17:57
18:10
18:19
18:23
09:13
09:45
09:19
09:51
10:11
10:47
10:16
10:54
上げ潮 下げ潮
トータル5素子(スワフ50°)による深浅測量が可能で、機器の傾斜・揺動補正および時空間的音速補正
により、極めて高精度な水底地形探査を実現します。また同時に流速マッピングも行い、全てのデータ要
素に対して、HydroSurveyorソフトウェア上のGIS機能によりレイヤリング処理が可能です。
スワフ50°より5点の測深点は、概ね水深と等
しい直径の円周上と円心に位置する
50°
測深測深測深測深
流速分布流速分布流速分布流速分布
17:10
17:15
17:28
17:34
17:57
18:10
18:19
18:23
09:13
09:45
09:19
09:51
10:11
10:47
10:16
10:54
上げ潮 下げ潮
トータル5素子(スワフ50°)による深浅測量が可能で、機器の傾斜・揺動補正および時空間的音速補正
により、極めて高精度な水底地形探査を実現します。また同時に流速マッピングも行い、全てのデータ要
素に対して、HydroSurveyorソフトウェア上のGIS機能によりレイヤリング処理が可能です。
スワフ50°より5点の測深点は、概ね水深と等
しい直径の円周上と円心に位置する
50°
測深測深測深測深
流速分布流速分布流速分布流速分布
ソフトウェア画面
3Dジオグラフィ
測深点ジオメトリー
河口域調査
調査航跡
流速分布
河口地形
流速ベクトル
HydroSurveyor-M9 深浅測量・流況解析ソフトウエア
表層
中層
下層

77© 2020 Xylem
PCMモジュール
RiverSurveyor M9
CastAway
(1) 計測運用方法 ボトムトラッキング計測GPS補完による航行計測
(2) 流速計測用 3.0MHz×4基/1.0HMz×4基 トランスデューサ (周波数自動切替)(3) 流速計測性能 -計測範囲(水深) 0.06m ~ 40m -計測範囲(流速) +/- 20 m/ s -計測精度 +/- 0.25% または +/- 0.2cm/s
(4) セルサイズ -セル数(層数) 最大128 -セルサイズ 0.02m ~ 4m (オートセルサイズ)(5) 水深計測 0.5MHz×1基 及び -水深計測用ビーム 3.0 or 1.0MHz ×4基(計5基)
(6) 内部ピンレート Max70Hz
(7) データ出力レート 1Hz
(8) 流量計測 -計測可能水深 0.3m ~ 40m(ボトムトラッキング法) -計測可能水深 0.3m ~ 80m (GPS法) -流量計算 0.3m ~ 80m (GPS法)
(9) 寸法・重量 12.8cm×25.9cm2.3kg(空中) -0.6kg(水中)
(10) 温度センサ ‐分解能 0.01℃ ‐精度 ±0.1℃(11) コンパス/傾斜計 ‐範囲 360° ‐向き ±2° ‐ピッチ/ロール ±1°
(12) メモリ 8GB
(13) 電源 12-18VDC
(14) 通信 RS232C
(15) 耐水深 50m
(16) 運用温度 -5 ~45℃
(17) 保管温度 -10~70℃
(1) 電源 ‐種類:単3型アルカリ電池 or NIMH ‐連続稼動時間:連続使用8時間 (RTKGPS連動時6時間)(2) GPSオプション SBAS GPS < 1m RTK GPS < 0.03m(3) Radio 周波数 :2.4GHz Radio到達距離 Power Low/High) PC-Rover間 :450m/1500m RTK/Base-Rover間 :1000m/3000m
(1) 重量 ‐重量: 約 0.45kg(2) 電気電導度 ‐範囲:0~100,000 μS/cm 精度:0.25%±5(3) 温度 - 範囲:-5~45℃ 精度:0.05℃(4) 圧力 - 範囲:0~100m 精度:0.25%FS(5) 塩分 - 範囲:0~50ppt 精度:0.1ppt(6) 音速 - 範囲:1400~1500m/s 精度:0.15m/s(7) GPS - 精度:10m
RiverSurveyor-M9 システム仕様

88© 2020 Xylem
ザイレム ジャパン (ワイエスアイ・ナノテツク株式会社)〒210-0023神奈川県川崎市川崎区小川町14-19浜屋八秀ビル3階TEL 044-222-0009 FAX [email protected]
KATANA動力アタッチメント搭載ハイドロボードII
ハイドロボードII(曳航浮体)
ベッセル/トウフロート
寸法: 130L x 68W cm 150L x 68W cm重量: 9kg 約15kg
(バッテリー込み、ハイドロボードⅡへ装着時)
対応流速: 5m/sec TBD航法: 曳航 ラジコン or 自律航行 切替航行速度: TBD航続時間: 1.5時間(1.4km/h静水航行)
*航行速度・条件によるバッテリー: Li-Feリチウムフェライト(13.2V 12Ah 158Wh)