Embed Size (px)
Citation preview

Source Term Estimation via SMC
SAMSI Undergraduate Workshop
31/10/08
Dr Nathan Green, UK MOD

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Contents
• Introduction
• Background
• Solutions…
• Technical details
• Application
• Toy model, R implementation

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Introduction
• I’m going to concentrate on one particular application of SMC methodology
• This is a
– real-life
– important problem
• Hopefully, highlight the practicality of using an SMC approach and demonstrate its use in the real world

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Me
• Brief history
• Skills and knowledge
• Current role and responsibilities

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Who are DSTL?
Part of the Ministry of Defence

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Who are we?
• Not in the Army, Navy or Air Force
• Civil servants – civilians who work for the government
• Our job is to:
– Carry out research for the Ministry of Defence
– Help the MoD to buy our forces the best equipment
– Keep our forces safe

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Covert Hazardous Releases

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
The Problem:Source Term Estimation
• In order to protect UK forces in the event of a CBRN event it will be necessary to make a hazard prediction
• Accurate hazard prediction requires knowledge of a source term
• Source term estimation provides the ability to take sensor readings and provide a source term and therefore a hazard prediction
• This allows commanders to protects their forces and plan counter measures

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Aim• Develop a Real-time Source-Term Estimation capability
– To make best estimates of the parameters of the release
– From low resolution alarms or high resolution time series data
– Produce results in a timely fashion, i.e. Under 5 minutes

Example Problem

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
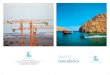
Release Modelled
• Release Mass– 60 kg
• Agent– GB
• Location of Release– 30UXC759083 (MGRS)
– 51°29’54.4”N 0°27’26.8”W (Lat Lon)
• Time of Release– 011200ZNOV2007
• Basic Met
– Wind speed 18kmh
– Easterly Wind Direction
– Neutral Conditions

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Sensor Configuration

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Current solution

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Current Solution (with troops)

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Current Solution and source term estimation from SMC

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
The Model
• We want to estimate the (static) source term parameters
• The only information we have about a release is through sensor measurements downwind, y
• So we want to estimate on-line the source term parameters as more data arrives
• Use a Bayesian approach!

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Bayes Theorem
Posterior
Likelihood
Prior

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Method of Solution
• How can we address this problem?
– MCMC?
– Kalman Filter?
– Particle Filter?
• Advantage/Drawbacks

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Prior Knowledge
• We know that given a positive sensor measurement the release time will have been in the past!
• We can have an idea of where is likely to be attacked/protected
• Previous scenario information can be used, perhaps through an MCMC approach

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Likelihood Function
• The likelihood is a way in which the data can be incorporated into our analysis
• It can be thought of as supplying the evidence in support of a given model
• In our case, the data (sensor measurements) tell use about the source term via an unobserved concentration

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Unobserved Concentration
•Assume that the concentration at some point in time and space has a Clipped Gaussian distribution

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Clipped Gaussian Curve

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Sensors
• Many different sensors to model:
– Chemical Releases
• Bar sensor
• Threshold sensor
• Concentration realisation sensor
– Biological Releases
• Particle Detector / Resonant Mirror
– Radiological Releases
• Long Range Gamma Sensor

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Key Elements
• Generate a ‘cloud’ of source term hypotheses (particles)
• A dispersion model produces concentration probability distributions at each sensor location and time point for every hypothesis
• Sensor models use these probabilities to create likelihood values for these hypotheses
• The hypotheses are updated in light of in-coming sensor measurement

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Particle Diversity
• Unfortunately, the initial source term estimates may not prove to be very good guesses
• In this case, we may be left with just a single decent particle
• To remedy this problem a ‘diversifying’ step is included
– New particles are probabilistically generated and accepted
– A Metropolis-Hastings MCMC step

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Algorithm Description

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Chemical Release Example Video
• Video

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
R code

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
R code

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
R code

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Example Output

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Marginals

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Trace Plots

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
Dispersion Model Output

© Dstl 2008
31 October 2008Dstl is part of the Ministry of Defence
UNCLASSIFIED
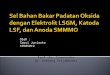
Note on Estimation Bias
• A small release mass close to the sensor array and a large release mass further away from the sensors produce comparable concentration measurements at the sensors
– The release location estimate is likely to be over-predicted (i.e. further away)
– In terms of warning and reporting, will err on the side of safety and predict a larger affected hazard area
y coordinate
Close to sensors Further from
sensors
Co
nce
ntr
atio
n
Sensor y location