Embed Size (px)
Citation preview

Spatio-temporal constraints for recognizing 3D objects in videos
http://slipguru.disi.unige.it
Nicoletta Noceti
Università degli Studi di Genova
2
Outline of the presentation
3D object recognition View based approaches Local descriptors for object recognition Our approach
Spatio temporal models for 3D objects recognition Modeling sequences Representation of video sequences w.r.t. the model 2-stage matching procedure
Recognizing objects: experiments and results
3
Object recognition
Localisation means to determine the pose of each object relative to a sensor
Categorization means recognising the class to which an object belongs instead of recognising that particular object
The goal of recognition systems is to identify which objects are present in a scene
Unlike ”merely” perceiving a shape, recognising it involves memory, that is accessing at representations of shapes seen in the past [Wittgenstein73]
4
Object recognition
5
View based object recognition
View based approaches to 3D object recognition gained attention as a way to deal with appearance variation [Murase et al. 95, Pontil et al. 98] no explicit model is required
Local approaches produce relatively compact descriptions of the image content and do not suffer from the presence of cluttered background and occlusions [Mikolajczyk et al. 03 ]
Local object models are often inspired by text categorization [Cristianini et al. 02]
Many view based local approach to recognition have been proposed [Leibe et al. 04, Csurka et al. 04]
6
Our approach to recognition
We observe an object from slightly different viewpoints and exploit local features distinctive in space and stable in time to perform recognition
Our approach shares some similarities with codebook methods but our method extends this concept also in the temporal domain
7
Our approach to recognition
View-based recognition systems do not need explicit computation of 3D object models
Local approaches produce compact descriptions and do not suffer from cluttered background and occlusions
Spatial constraints improve quality of recognition [Ferrari et al. 06]
Biological vision systems gather information by means of motion to include important cues for depth perception and object recognition [Stringer et al.06]
8
Outline of the presentation
3D object recognition View based approaches Local descriptors for object recognition Our approach
Spatio temporal models for 3D objects recognition Modeling sequences Representation of video sequences w.r.t. the model 2-stage matching procedure
Recognizing objects: experiments and results
9
Drawbacks of locality
His eyes would dart from one thing to another, picking up tiny features, individual features, as they had done with my face. A striking brightness, a colour, a shape would arrest his attention and elicit comment – but in no case did he get the scene-as-a-whole. He failed to see the whole, seeing only details, which he spotted like blips on a radar screen. He never entered into relation with the picture as a whole - never faced, so to speak, its physiognomy. He had no sense whatever of a landscape or a scene.
”The Man Who Mistook His Wife For A Hat: And Other Clinical Tales”, by Oliver Sacks, 1970
10
Ideas Obtain a 3D object recognition method
based on a compact description of image sequences
Exploit spatial information on proximity of features appearing contemporaneously
Exploit temporal continuity both on training and test
E. Delponte, N. Noceti, F. Odone and A. Verri Spatio temporal constraints for matching view-based descriptions of 3D objects In WIAMIS 2007
11
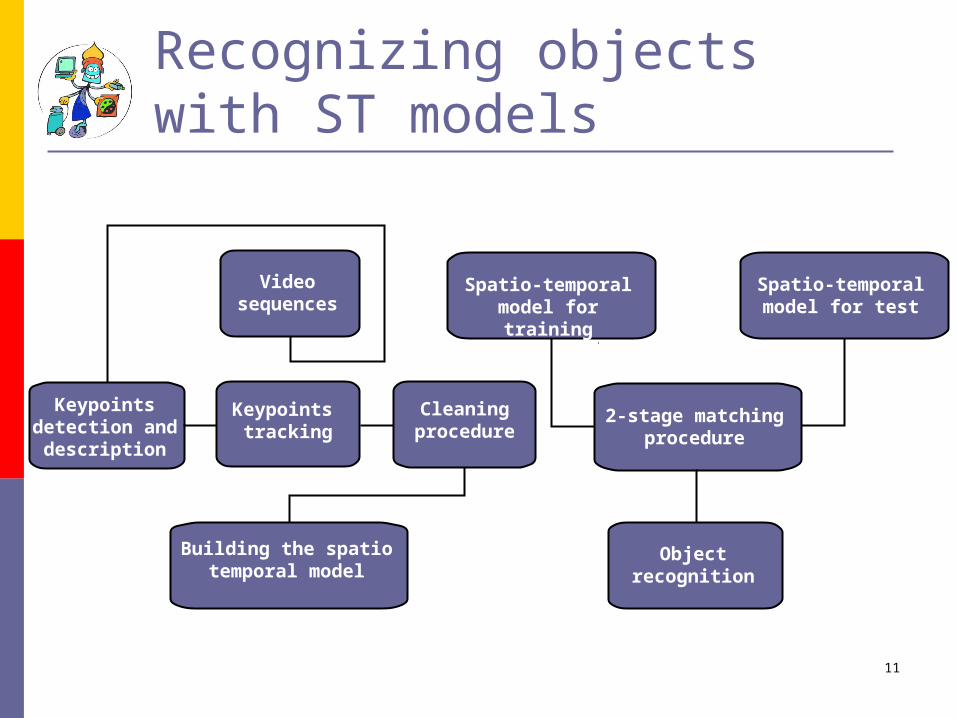
Recognizing objects with ST models
Video sequences
Keypoints detection and
description
Keypoints tracking
Cleaning procedure
Building the spatio temporal model
2-stage matching procedure
Object recognition
Spatio-temporal model for training
Spatio-temporal model for test
12
From sequence to spatio-temporal model
13
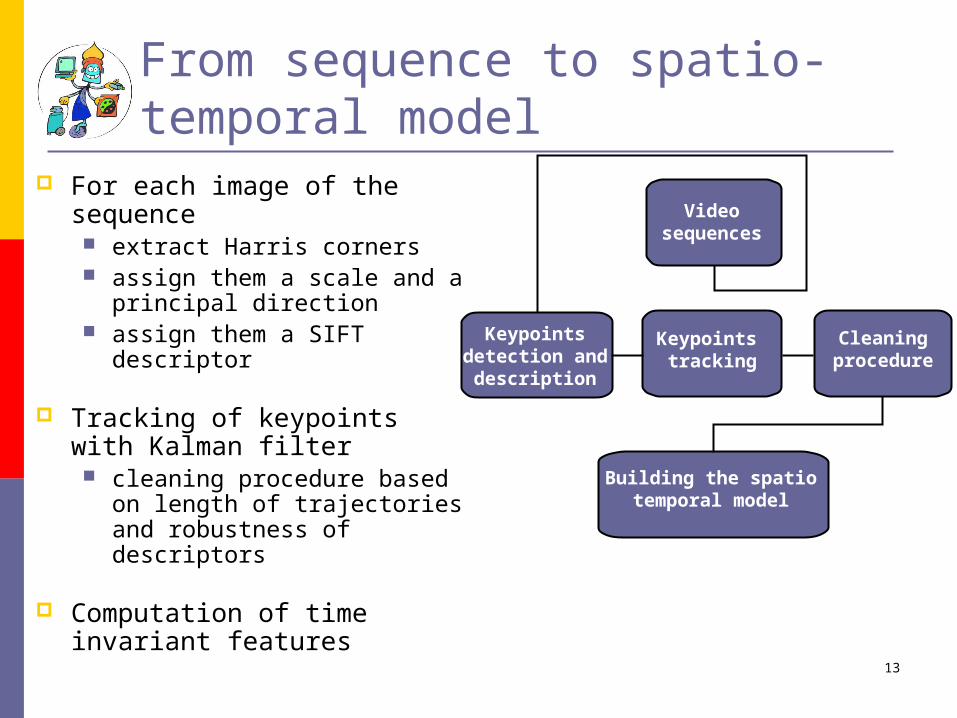
For each image of the sequence extract Harris corners assign them a scale and a
principal direction assign them a SIFT
descriptor
Tracking of keypoints with Kalman filter cleaning procedure based on
length of trajectories and robustness of descriptors
Computation of time invariant features
From sequence to spatio-temporal model
Video sequence
s
Keypoints detection and
description
Keypoints tracking
Cleaning procedure
Building the spatio temporal model
14
From sequence to spatio-temporal model
15
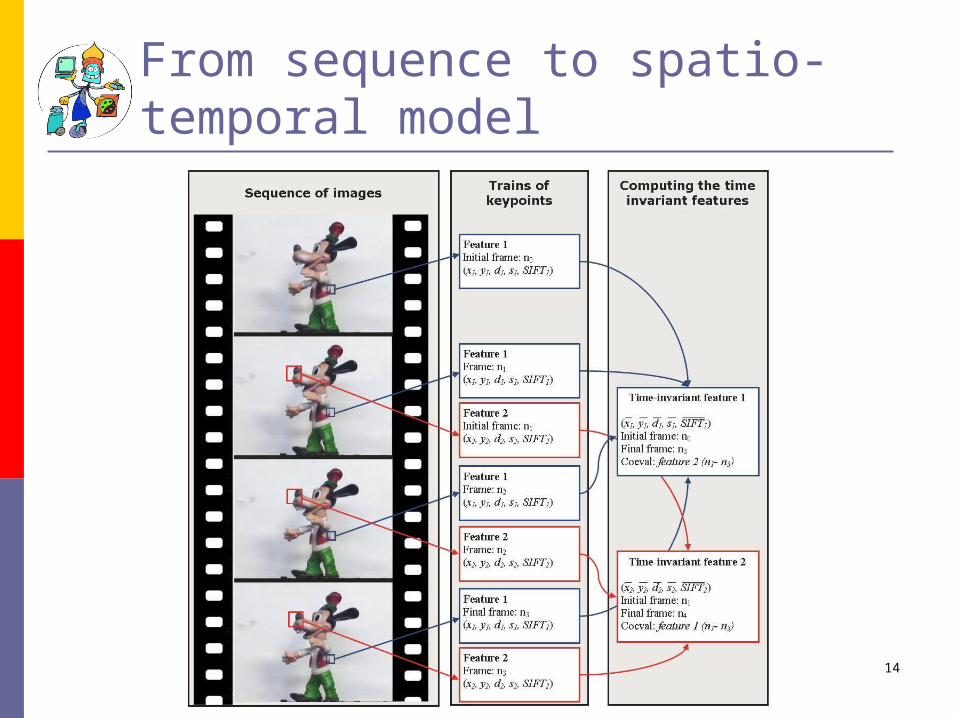
Time invariant feature We obtain a set of time-invariant features:
a spatial appearance descriptor, that is the average of all SIFT vectors of its trajectory
a temporal descriptor, that contains information on when the feature first appeared in the sequence and on when it was last observed
16
The spatio-temporal model
The collection of time-invariant features constitutes a spatio-temporal model that we use to train our system
We emphasise the temporal coherence of the model and we exploit features appearing simultaneously
17
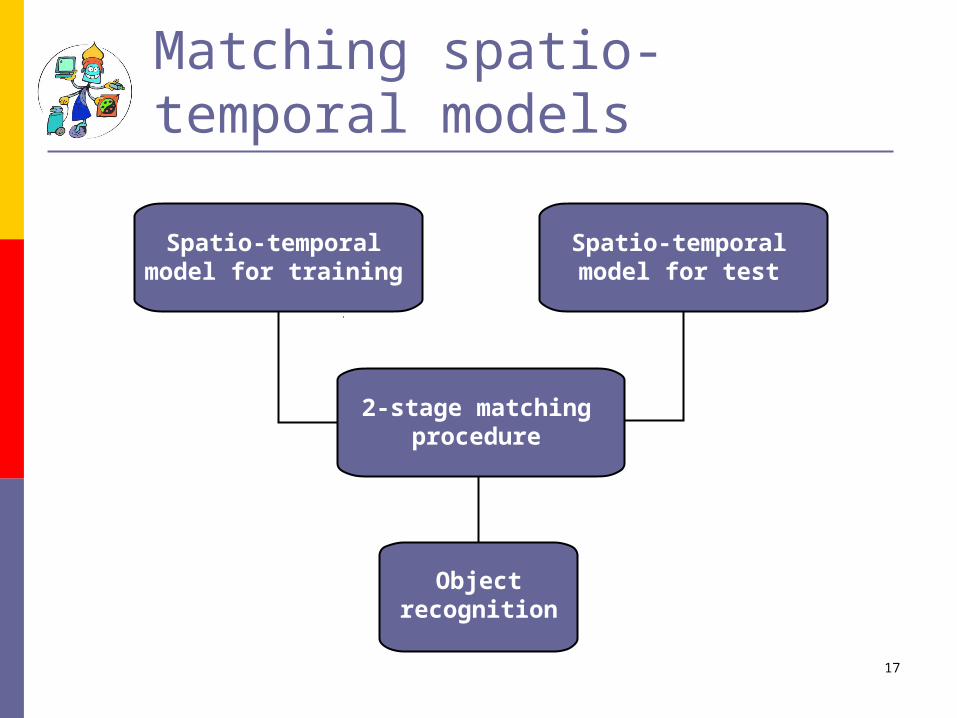
Matching spatio-temporal models
2-stage matching procedure
Object recognition
Spatio-temporal model for training
Spatio-temporal model for test
18
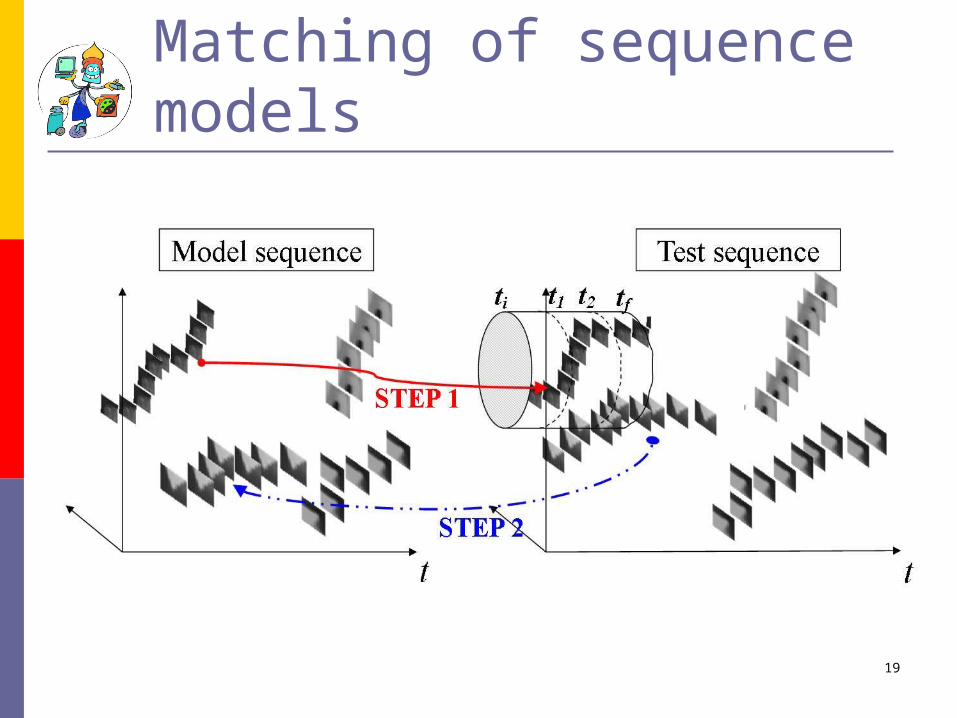
Matching of sequence models
For each video sequence we compute its spatio-temporal model
Given a test sequence, we perform a two stage matching procedure by exploiting spatial and temporal coherence of time-invariant features we compute a first set of matches we reinforce the procedure by analising spatial
and temporal matches neighborhood
19
Matching of sequence models
20
Outline of the presentation
3D object recognition View based approaches Local descriptors for object recognition Our approach
Spatio temporal models for 3D objects recognition Modeling sequences Representation of video sequences w.r.t. the model 2-stage matching procedure
Recognizing objects: experiments and results
21
Experiments and results Matching assessment
Illumination, scale and background changes Changes in motion Increasing the number of objects
Object recognition on a 20 objects dataset
Recognition on a video streaming
22
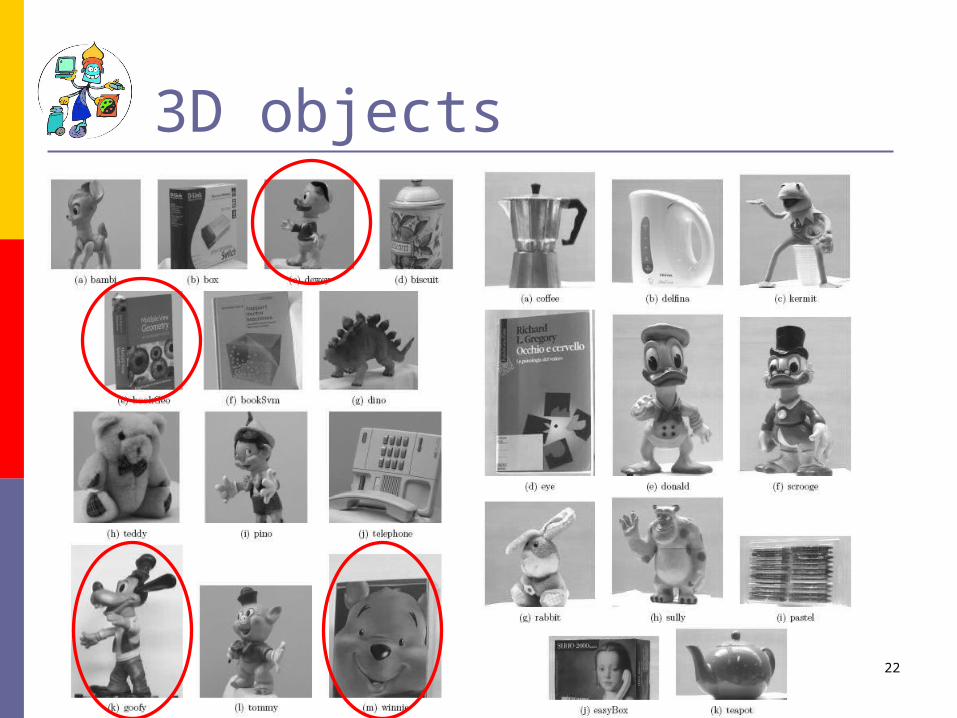
3D objects
23
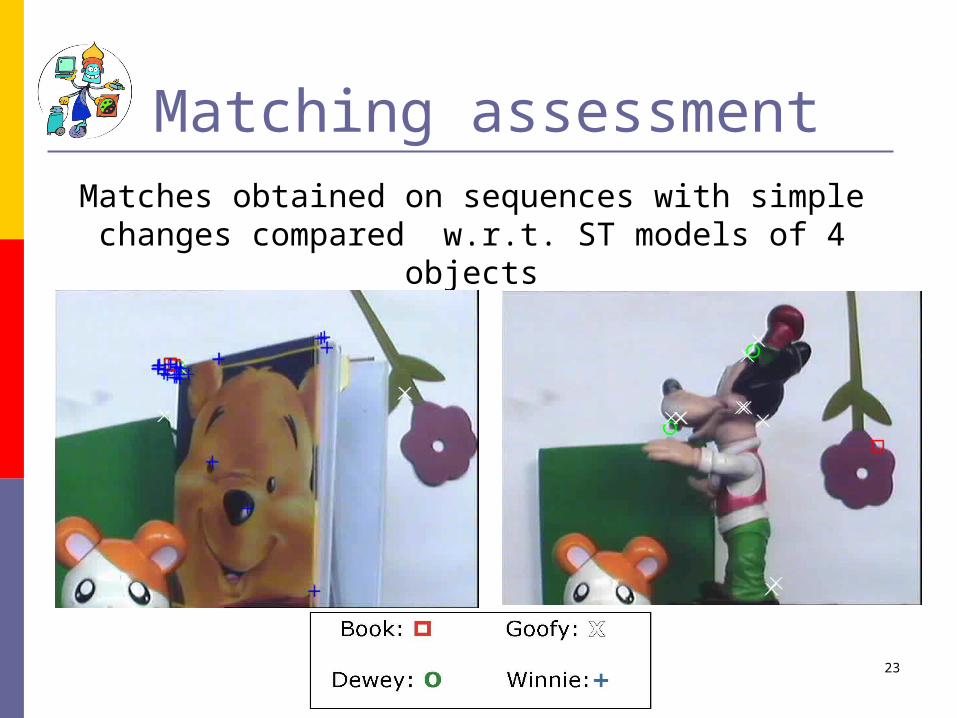
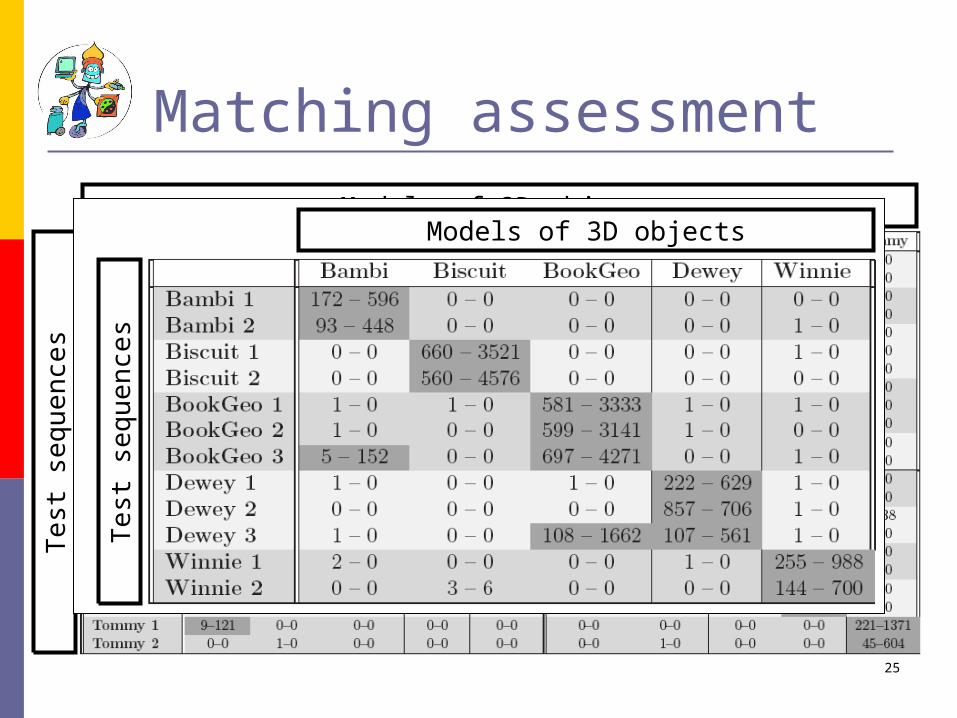
Matching assessmentMatches obtained on sequences with simple
changes compared w.r.t. ST models of 4 objects
24
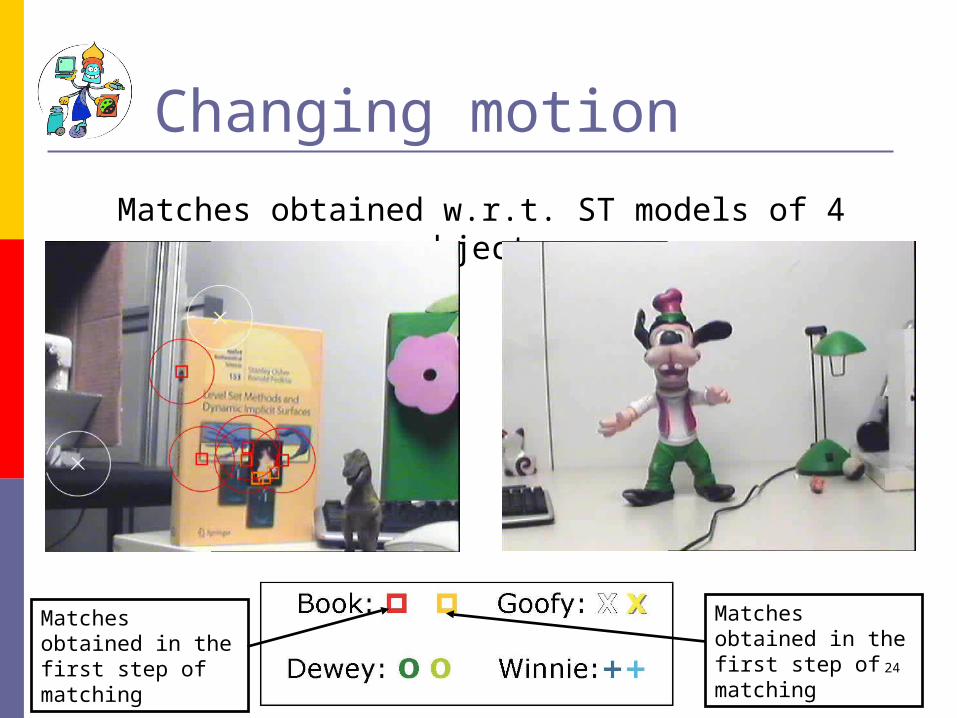
Changing motion
Matches obtained w.r.t. ST models of 4 objects
Matches obtained in the first step of matching
Matches obtained in the first step of matching
25
Models of 3D objects
Test
seq
uen
ces
Matching assessment
Models of 3D objects
Test
seq
uen
ces
26
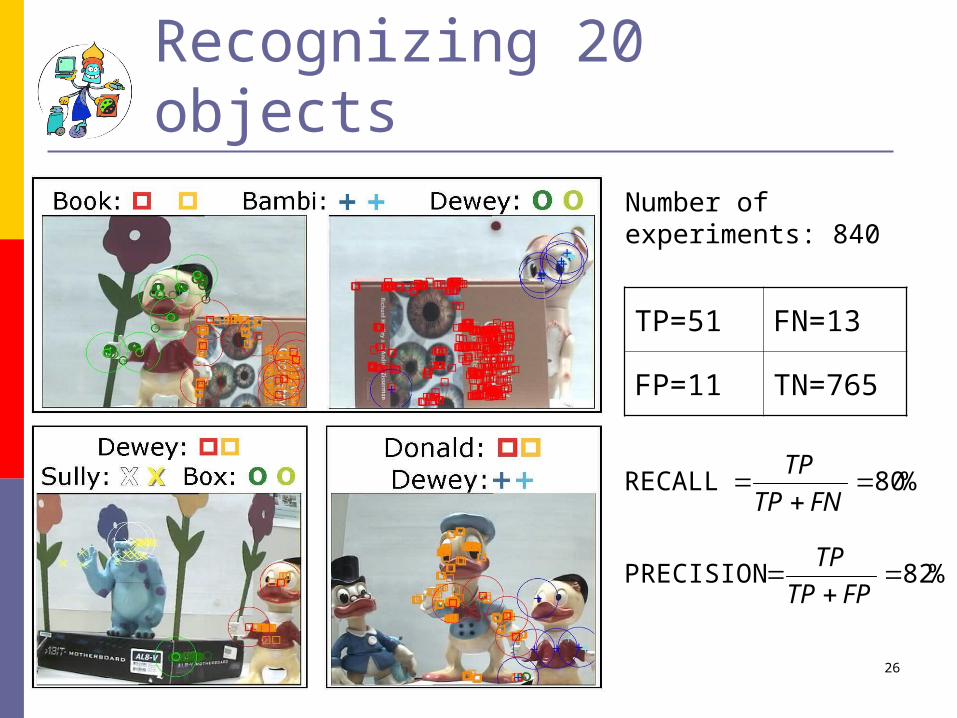
Recognizing 20 objectsNumber of experiments: 840
TP=51 FN=13
FP=11 TN=765
%80RECALL
FNTP
TP
%82PRECISION
FPTP
TP
27
Recognition on a video stream
28
Conclusion and future work
We exploited the compactness and the expressiveness of local image descriptions to address the problem of 3D object recognition
We devised a system based on the use of spatial and temporal information and we have proved how the model of a 3D object benefit of both these information
The system could benefit from adding information on the image context [Tor03]

Thanks for your attention!