Embed Size (px)
Citation preview

Squeeze film damping effect on the dynamic response of a MEMS torsion mirror
This article has been downloaded from IOPscience. Please scroll down to see the full text article.
1998 J. Micromech. Microeng. 8 200
(http://iopscience.iop.org/0960-1317/8/3/005)
Download details:
IP Address: 66.194.72.152
The article was downloaded on 28/08/2013 at 10:55
Please note that terms and conditions apply.
View the table of contents for this issue, or go to the journal homepage for more
Home Search Collections Journals About Contact us My IOPscience

J. Micromech. Microeng. 8 (1998) 200–208. Printed in the UK PII: S0960-1317(98)89945-2
Squeeze film damping effect on thedynamic response of a MEMS torsionmirror
Feixia Pan †, Joel Kubby †, Eric Peeters †, Alex T Tran † andSubrata Mukherjee ‡
† Xerox Wilson Research Center, 800 Phillips Road, Webster, NY 14580, USA‡ Department of Theoretical and Applied Mechanics, Cornell University, Ithaca,NY 14850, USA
Received 9 December 1997, accepted for publication 13 May 1998
Abstract. This paper presents analytical solutions for the effect of squeeze filmdamping on a MEMS torsion mirror. Both the Fourier series solution and thedouble sine series solution are derived for the linearized Reynold equation which isobtained under the assumption of small displacements. Analytical formulae for thesqueeze film pressure variation and the squeeze film damping torque on thetorsion mirror are derived. They are functions of the rotation angle and the angularvelocity of the mirror. On the other hand, to verify the analytical modeling, theimplicit finite difference method is applied to solve the nonlinear isothermal Reynoldequation, and thus numerically determine the squeeze film damping torque on themirror. The damping torques based on both the analytical modeling and thenumerical modeling are then used in the equation of motion of the torsion mirrorwhich is solved by the Runge–Kutta numerical method. We find that the dynamicangular response of the mirror based on the analytical damping model matchesvery well with that based on the numerical damping model. We also performexperimental measurements and obtain results which are consistent with thoseobtained from the analytical and numerical damping models. Although theanalytical damping model is derived under the assumption of harmonic response ofthe torsion mirror, it is shown that with the air spring effect neglected, this dampingmodel is still valid for the case of nonharmonic response. The dependence of thedamping torque on the ambient pressure is also considered and found to beinsignificant in a certain regime of the ambient pressure. Finally, the convergenceof the series solutions is discussed, and an approximate one term formula ispresented for the squeeze film damping torque on the torsion mirror.
1. Introduction
In our torsion mirror design [4], the dynamic tilting motionof the mirror under certain excitation conditions needs to bepredicted. An important issue involved in this prediction isto determine the squeeze film damping effect due to the airgap between a movable mirror and a fixed substrate. Thispaper uses both the Fourier series technique and the doublesine series technique to derive analytical formulae for thesqueeze film pressure variation, and thus the squeeze filmdamping torque, on a torsion mirror.
The squeeze film damping effect on the dynamics ofmicrostructures has been extensively studied in the MEMSarea, for example, in the work done by Starr [5], Andrewset al [6, 7], and Yang and Senturia [8]. Prior to the advent ofmicrostructures, there had been a lot of success in the studyof squeeze film damping related to gas film lubrication. Adetailed review is available in [6]. However, most of theprevious research on the squeeze film damping effect hasbeen concerned with the squeeze film damping due to the
normal motion between two parallel or substantially parallelsurfaces. There have been only a few investigations of thesqueeze film damping generated by the rotation betweentwo very closely spaced surfaces. The tilting motion ofthin annuli was discussed by Blech [9] in order to findthe squeeze film cutoff frequency. In a recent paper byDarling et al [10], a Green function method is used tofind the solution of the linearized Reynold equation, and aformula for the damping torque on a tilting rectangular plateis given byτ(t) = 6m,n=odd(32a2bPa/π
4m2n2)(k2mn/α
2 +jω)−1(−jωη)H0ejωt . This formula is very close to theformula derived in the present paper through the double sineseries scheme. The main difference is that the summationparametersm and n are both odd in the above formula,but one is odd and the other is even in the formuladeveloped in the present paper. In another recent paperby Dotzel et al [11], a formula for the damping coefficientof the rotatory movement of a MEMS mirror is given bycrot = Krotµ lmw5
m/(d + w)3. This formula is very similarto the approximate formula presented in this paper based on
0960-1317/98/030200+09$19.50 c© 1998 IOP Publishing Ltd

Squeeze film damping effect on MEMS torsion mirror
the first term of the double sine series solution. However,there is discrepency in the value of the coefficientKrotbetween this formula and the formula developed in ouranalysis.
The organization of this paper is as follows. We startin section 2 by considering the equation of motion ofthe torsion mirror and the nonlinear isothermal Reynoldequation [3] for the squeeze film damping. The squeezefilm damping torque in the equation of motion is determinedby solving the Reynold equation. In section 3, wederive an analytical solution of the linearized Reynoldequation [9, 12] based on both the Fourier series techniqueand the double sine series technique. The derivation iscarried out under the assumption of small displacement andharmonic dynamic response of the mirror. In section 4,in order to verify our analysis, we use the implicit finitedifference method [1, 2] to solve the nonlinear isothermalReynold equation, and thus numerically determine thesqueeze film damping. Both the analytical and numericalsolutions for the damping forces are then used in section 5to determine the dynamic response of the mirror underharmonic excitation. The result, based on the analyticaldamping model, is compared with and found to be veryclose to that based on the numerical solution of thenonlinear Reynold equation. However, solution of the samedynamic response problem takes only a few minutes ofcomputing time on aSun Ultra 1 workstation when theanalytical linear damping model is used, but more than halfa day if the numerical nonlinear damping model is usedinstead. With the aid of the numerical calculation of theanalytical damping torque, we confirm that the air springeffect on the damping torque is extremely small relative tothe dissipative damping effect, and thus can be consideredto be negligible, as long as the value of the squeeze numberσ is small [3, 5] In section 6, we show that with the airspring effect neglected, the analytical damping model isnot only valid for harmonic response, but is also validfor nonharmonic response, and that the dependence of thedamping torque on the ambient pressure is not significant ina certain regime of the ambient pressure. The convergenceof our series solutions is also discussed in this section.Finally, we discuss our conclusions in section 7.
2. Governing equations of a torsion mirror
Figure 1 shows a schematic diagram of the rotation of aMEMS torsion mirror.
Under the assumption that the mirror surface is rigid,the equation of motion of the mirror is given by:
I θ +Kθ = Te + Td (1)
whereθ is the rotation angle of the mirror,I is the polarmoment of inertia of the mirror,K is the torsional stiffnessof the torsion rods,Te is the external torque,Td representsthe squeeze film damping torque, and a superposed dotdenotes a time derivative.
The damping is mainly from the air that is squeezedunderneath the mirror, in the small gap between the tiltingmirror and the substrate. The squeeze film damping torque
Figure 1. Schematic diagram of the rotation of a MEMSmirror.
comes from the pressure distribution on the mirror surface.To determine the air pressure distribution in the squeezefilm, we need to solve the nonlinear isothermal Reynoldequation [3]
∂
∂X
(H 3P
∂P
∂X
)+ ∂
∂Y
(H 3P
∂P
∂Y
)= σ ∂(PH)
∂T(2)
whereP is the normalized pressure,P = p/pa, X andY denote the normalized spatial coordinates,X = x/lm,Y = y/lm, with lm representing the mirror length,H isthe normalized squeeze film thickness,H = h/h0, withh0 representing the initial squeeze film thickness,σ is thesqueeze number,σ = 12µωl2m/pah
20, µ is the air viscosity,
ω is a typical frequency of the squeeze component,pa is theambient air pressure andT is a scaled time,T = ωt . Theviscosityµ is a function of pressure: at room temperature,µ = 1.79× 10−5 Pa s whenpa = 1.013× 105 Pa (1 atm).
In general, the squeeze film damping force includesthe air spring effect and the dissipative damping effect. Ithas been pointed out by Langlois [3] and Starr [5] that forsmall values ofσ , the film behaves as though the fluidswere incompressible, while for very large values ofσ ,the film essentially acts as an air spring and exhibits littledissipation. In our design, for any frequencyω below oraround the first natural frequency of the mirror,σ is a verysmall value, and thus the dissipative damping force shouldbe dominant. At the beginning of our analysis, however,we consider both the dissipative damping force and the airspring force. We then find through numerical calculation ofthe damping torque that the air spring effect is very smalland thus is negligible. We shall return to this later for moredetails.
3. Analytical modeling of squeeze film damping
To perform analytical modeling analysis, we first simplifythe nonlinear isothermal Reynold equation (2) by assumingthat the motion of the mirror is restricted to be small andtherefore the pressure variation from ambient in the squeezefilm is also small. Upon introducing a small perturbationparameterδ such that
H = 1+ δH1 P = 1+ δ5 (3)
201

F Pan et al
we obtain the following linearized Reynold equation [9, 12]
∂25
∂X2+ ∂
25
∂Y 2= σ
(∂5
∂T+ ∂H1
∂T
). (4)
The relationship between the normalized squeeze filmthicknessH and the tilting angle of the mirrorθ is governedby:
H = h
h0= 1+ yθ
h0= 1+ Y lm
h0θ. (5)
To begin, we assume that the angular displacement ofthe mirror is a harmonic function of time:
θ(t) = 20 sin(ωt + φ) = 20 sin(T + φ) (6)
where20 represents the amplitude of the angle, andφis a constant phase delay. This assumption is obviouslyvery restrictive since even under harmonic excitation,the transient response is not harmonic, but this transientresponse is an important aspect of the mirror’s behavior thatmust be predicted in our design. We will show in section 6,however, that the analytical formula for the damping torque,derived under this assumption, is actually valid even ifthe dynamic response of the torsion mirror is an arbitraryfunction of time, as long as the squeeze numberσ is small.
Under this harmonic response assumption, equation (5)becomes
H = 1+ δY sin(T + φ) with δ ≡ lm20
h0(7)
where the definition ofδ shows that it will be a smallquantity when the amplitude of the tilting angle is small,which it is in our mirror design (tilting angle around±1◦).
Comparing (7) with (3), we see that
H1 = Y sin(T + φ). (8)
Use of (8) in (4) leads to
∂25
∂X2+ ∂
25
∂Y 2= σ
[∂5
∂T+ Y cos(T + φ)
]. (9)
Since the normalized pressure is unity on all outside edgesof the mirror, the boundary conditions associated with (9)are given by:
5(± 1
2, Y, T) = 5(X,± b
2, T) = 0 (10)
whereb is the ratio of the mirror width to the mirror length,that is,b = wm/lm.
Under the assumption that the solution of (9) has thefollowing form
5(X, Y, T ) = 51(X, Y ) sin(T + φ)+52(X, Y ) cos(T + φ) (11)
the above boundary value problem becomes:
∂251
∂X2+ ∂
251
∂Y 2= −σ52 (12)
∂252
∂X2+ ∂
252
∂Y 2= σ(51+ Y ) (13)
5i
(± 12, Y
) = 5i
(X,± b
2
) = 0 (i = 1, 2). (14)
Upon introducing a complex variable
8(X, Y ) = 51(X, Y )+ i52(X, Y ) (15)
this problem can further be simplified to the followingboundary value problem:
∂28
∂X2+ ∂
28
∂Y 2− iσ8 = iσY (16)
8(± 1
2, Y) = 8(X,± b
2
) = 0. (17)
We next derive both the Fourier series solution and thedouble sine series solution to this boundary value problem.
3.1. Fourier series solution
To begin, we notice thatY can be expanded into a Fouriersine series:
Y =∞∑n=1
bn sin2nπY
b− b
2< Y <
b
2(18)
where
bn = 4
b
∫ b2
0Y sin
2nπY
bdY = b
nπ(−1)n−1. (19)
In accordance with this expansion, we assume
8(X, Y ) =∞∑n=1
fn(X) sin2nπY
b(20)
which identically satisfies the trivial boundary condition atY = ± b
2. Substitution of (18) and (20) into (16) yields
d2fn
dX2−[
iσ +(
2nπ
b
)2]fn = iσbn (n = 1, 2, 3, . . .).
(21)Keeping in mind the boundary conditionfn(± 1
2) = 0, wehave found the following solution of (21):
fn(X) =(C1n cosr2nX coshr1nX
−C2n sinr2nX sinhr1nX − C3n)
+i(C2n cosr2nX coshr1nX
+C1n sinr2nX sinhr1nX − C4n)
(22)
wherer1n and r2n are the real and imaginary parts of thepositive characteristic root of (21), respectively. They aregiven by
r1n =
√√√√√√(
2nπ
b
)2
+√(
2nπ
b
)4
+ σ 2
2
r2n =
√√√√√√−(
2nπ
b
)2
+√(
2nπ
b
)4
+ σ 2
2.
(23)
202

Squeeze film damping effect on MEMS torsion mirror
The coefficientsC1n, C2n, C3n and C4n are defined asfollows:
C1n ≡bn
[σ 2 cos
r2n
2cosh
r1n
2+ σ
(2nπ
b
)2
sinr2n
2sinh
r1n
2
][(
2nπ
b
)4
+ σ 2
] [cos2
r2n
2+ sinh2 r1n
2
](24)
C2n ≡bn
[σ
(2nπ
b
)2
cosr2n
2cosh
r1n
2− σ 2 sin
r2n
2sinh
r1n
2
][(
2nπ
b
)4
+ σ 2
] [cos2
r2n
2+ sinh2 r1n
2
](25)
C3n ≡ σ 2bn(2nπ
b
)4
+ σ 2
C4n ≡σbn
(2nπ
b
)2
(2nπ
b
)4
+ σ 2
. (26)
Therefore, recalling (20), we see that
8(X, Y ) =∞∑n=1
[(C1n cosr2nX coshr1nX
−C2n sinr2nX sinhr1nX − C3n)
+i(C2n cosr2nX coshr1nX
+C1n sinr2nX sinhr1nX − C4n)] sin2nπY
b. (27)
We next compare (27) with the definition of8(X, Y ) (15)to obtain
51 =∞∑n=1
(C1n cosr2nX coshr1nX
−C2n sinr2nX sinhr1nX − C3n)
sin2nπY
b(28)
52 =∞∑n=1
(C2n cosr2nX coshr1nX
+C1n sinr2nX sinhr1nX − C4n)
sin2nπY
b. (29)
On the other hand, use of (6), (7) and (11) in (3) determinesthe pressure variation:
4P = δ5 = lm
h0
(51θ +52
1
ωθ
). (30)
The damping torque is thus determined by integratingthe contribution of the pressure variation over the mirrorsurface:
Td =∫A
4PpaydA = l4mpa
h0
[θ
∞∑n=1
C9nb2
2nπ(−1)n+1
+ 1
ωθ
∞∑n=1
C10nb2
2nπ(−1)n+1
](31)
where we define
C9n ≡ C3nC7n − C4nC8n
C10n ≡ C4nC7n + C3nC8n (32)
C5n ≡ r1n
r21n + r2n2
C6n ≡ −r2nr2
1n + r2n2(33)
C7n ≡ C5n sinhr1n − C6n sinr2n
cos2r2n
2+ sinh2 r1n
2
− 1
C8n ≡ C6n sinhr1n + C5n sinr2n
cos2r2n
2+ sinh2 r1n
2
. (34)
3.2. Double sine series solution
In accordance with the boundary condition (17), we assume
8(X, Y ) =∞∑m=1
∞∑n=1
Cmn sinmπ(X + 12) sin
nπ
b(Y + b
2).
(35)Use of this assumption in (16) leads to
−∞∑m=1
∞∑n=1
Cmn
[(mπ)2+
(nπb
)2+ iσ
]sinmπ
(X + 1
2
)sin
nπ
b(Y + b
2) = iσY. (36)
From this equation we can determine the coefficientsCmn.They are given by
Cmn = 8bσ
mnπ2
σ + i
[(mπ)2+
(nπb
)2]
[(mπ)2+
(nπb
)2]2
+ σ 2
m = 1, 3, 5, . . . , n = 2, 4, 6, . . . , (37)
Cmn = 0 otherwise. (38)
Therefore, we obtain
8(X, Y ) =∑
odd m
∑even n
8bσ
mnπ2
σ + i
[(mπ)2+
(nπb
)2]
[(mπ)2+
(nπb
)2]2
+ σ 2
sinmπ(X + 1
2
)sin
nπ
b(Y + b
2) (39)
51 =∑
odd m
∑even n
8bσ 2
mnπ2
1[(mπ)2+
(nπb
)2]2
+ σ 2
sinmπ(X + 1
2
)sin
nπ
b(Y + b
2) (40)
52 =∑
odd m
∑even n
8bσ
mnπ2
(mπ)2+(nπb
)2
[(mπ)2+
(nπb
)2]2
+ σ 2
sinmπ(X + 1
2
)sin
nπ
b(Y + b
2) (41)
and
203

F Pan et al
Td = − 16lmw3mpa
π4h0
×
θ∑
odd m
∑even n
σ 2
m2n2
1[(mπ)2+
(nπb
)2]2
+ σ 2
+ 1
ωθ∑
odd m
∑even n
σ
m2n2
(mπ)2+(nπb
)2
[(mπ)2+
(nπb
)2]2
+ σ 2
.(42)
This concludes our analytical modeling of the squeezefilm damping on a MEMS torsion mirror.
4. Numerical modeling of squeeze film damping
In this section, we apply the implicit (backward) finitedifference method [1, 2] to solve the nonlinear Reynoldequation (2). For a node (i, j ) on the mirror, we use thefollowing approximate formulae:
∂P
∂T
∣∣∣∣i,j
= Pi,j − P−i,j4T (43)
∂P
∂X
∣∣∣∣i,j
= P(i+1),j − P(i−1),j
24X (44)
∂P
∂Y
∣∣∣∣i,j
= Pi,(j+1) − Pi,(j−1)
24Y (45)
∂2P
∂X2
∣∣∣∣i,j
= P(i+1),j − 2Pi,j + P(i−1),j
(4X)2 (46)
∂2P
∂Y 2
∣∣∣∣i,j
= Pi,(j+1) − 2Pi,j + Pi,(j−1)
(4Y )2 (47)
in the Reynold equation (2) and thus obtain
Pi,j = P−i,j +4TσHj
2
[(∂P
∂X
∣∣∣∣i,j
)2
+ Pi,j ∂2P
∂X2
∣∣∣∣i,j
+(∂P
∂Y
∣∣∣∣i,j
)2
+ Pi,j ∂2P
∂Y 2
∣∣∣∣i,j
]+3Hj
4Tσ
lm
h0Pi,j
∂P
∂Y
∣∣∣∣i,j
θ − Pi,j YjHj
lm
h0ωθ (48)
where Pi,j and P−i,j represent the averaged normalizedpressure at node(i, j) at the current time step and atthe previous time step, respectively,Hj represents thenormalized film thickness at node(i, j), Hj = 1 +(lm/h0)Yj θ .
We see from (48) as well as (44) through (47) that thisfinite difference scheme is implicit. Every time step, we usethe Newton–Raphson algorithm to solve a set of nonlinearalgebraic equations for the new pressure distribution giventhe pressure distribution in the previous time step. Thedamping torque is calculated by averaging the pressure onthe nodes of an element and then summing the contributionsof all the elements over the mirror surface.
5. Dynamic response of an example mirror underharmonic excitation—comparison of simulationand experiment
We present in this section numerical results for the tiltingangle versus time of an example mirror under harmonicexcitations. We also show some experimental results andcompare them with the corresponding numerical results.
The analytical damping model and the numericaldamping model discussed in section 3 and section 4 areapplied in determining the damping torqueTd to be used in(1), the equation of motion of the mirror. The parameters ofthis example mirror are:lm = 1500µm, wm = 1400µm,h0 = 42 µm, I = 5.51× 10−15 kg m2, K = 4.49×10−7 N m rad−1, fn = 1.44 kHz. Herewm denotes themirror width, andfn is the first natural frequency of thesystem. We use the Runge–Kutta numerical method tosolve the equation of motion and thus obtain the dynamicresponse of the mirror.
Assume that the external torqueTe = 4.84 ×10−9 sin(2πf t) N m, where we choosef = 10 Hz, 1 kHzand 1.44 kHz in turn. The dynamic response of the mirrorunder these excitations is shown in figure 2 through figure 4.There are three curves shown in each figure. The solidline curve denotes the excitation torque, the dashed line isobtained from the analytical damping model based on theFourier series solution, and the dot–dashed line curve isobtained from numerically solving the nonlinear Reynoldequation in order to obtain the damping torque. The resultcorresponding to the double sine series damping model isnot shown in these figures. This is because we have foundthat the Fourier series solution and the double sine seriessolution of the squeeze film damping yield almost identicalresults for the dynamic response. Therefore, to make thingsmore simple, and to keep the figures clear, we only showthe result associated with the Fourier series solution.
From these figures, we see that the analytical dampingmodel matches well with the numerical damping model.Under f = 10 Hz andf = 1 kHz, the two sets of theresponse curves are so close that it is difficult to distinguishthem from each other. Even at the resonant frequencyf = 1.44 kHz, the response curves are still close. We canonly observe a small difference at the peak of the curves,where the displacement is the maximum.
An important point, however, is that the analyticaldamping model significantly reduces the amount ofcomputing time. With the aid of the analytical dampingmodel, it takes only a few minutes to solve the samedynamic response problem that requires more than halfa day using the numerical damping model. Comparedto the explicit finite difference method [13], the implicitfinite difference scheme increases the time increment bya factor of up to several orders of magnitude, and thussignificantly reduces the computing time. However, thisimplicit numerical method suffers from having to solve asystem of a large number of nonlinear algebraic equationsfor the pressure distribution at each node at each time step,and thus still requires a large amount of computing time.It is the analytical modeling of squeeze film damping thateliminates this problem.
204

Squeeze film damping effect on MEMS torsion mirror
Figure 2. Dynamic tilting response of the mirror atf = 10 Hz harmonic excitation.
Figure 3. Dynamic tilting response of the mirror atf = 1 kHz harmonic excitation.
Figure 4. Dynamic tilting response of the mirror atf = 1.44 kHz (resonant frequency) harmonic excitation.
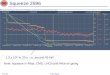
Using the analytical damping model, we have foundthe displacement frequency response function of the torsionmirror, as shown in figure 5. From this figure, we seethat due to the damping effect, the maximum responseoccurs atfm = 1.36 kHz, a little bit smaller than theresonant frequencyfn = 1.44 kHz. The quality factor of
50. 100. 500. 1000.
Frequency (Hz)
0.2
0.3
0.5
0.7
1
1.5
2
Am
plit
ude
gain
Modeling results
Experimental results
Figure 5. Frequency response function of the torsionmirror.
the torsion mirror isQ = 2.20. Using the relationQ = 12ξ
or fm =√
1− 2ξ2fn, we find ξ = 0.22, whereξ is thedamping ratio. Sinceξ < 1, the system is underdamped.
Also shown in figure 5 are the experimentalmeasurement data of the displacement frequency responsefunction of the mirror. From these experimental results, themaximum frequency occurs atfm = 1.59 kHz, the quantityfactorQ = 2.58 and the damping ratioξ = 1
2Q = 0.19.We see from figure 5 that although the modeling results
are fairly close to the experimental results, the differencebetween these results is not very small. Recalling (1),the equation of motion of the mirror, we here figure outthe following potential reasons for the mismatch betweenthe modeling results and the experimental results. First ofall, this equation is associated with the assumption that themirror surface is a rigid body. As a result, the neglectedelastic deformation effect may make a contribution to themismatch. Second, regarding the damping model, weclaim that in the range of interest of our analysis, theanalytical damping model matches well with the numericaldamping model. These damping models, however, areboth based on the nonlinear isothermal Reynold equation.This Reynold equation is derived under certain assumptions[3], and thus may not be able to capture the squeeze filmdamping behavior very well. Third, the torsion rod stiffnessdetermined by the analytical formula [4]K = 2GJ/T Lmay not be very close to the real torsion rod stiffness.Fourth, experimental measurements may have errors. Forexample, it is very difficult to accurately measure the gapbetween the electrodes and the reflecting mirror.
6. Advanced investigations
As mentioned before, the squeeze film damping torqueincludes contributions from both the air spring effect andthe dissipative damping effect. However, modeling resultsshow that the air spring effect is negligible in our analysis.This is consistent with the results found by Langlois [3]and Starr [5], since the squeeze numberσ is a very smallquantity in the range of interest of our study. Therefore, inthe discussion that follows, we neglect the terms due to theair spring effect in the expression of the damping torque.
205

F Pan et al
This leads to a number of new observations about thebehavior of squeeze film damping. We shall discuss theseobservations using the double sine series solution which ismore convenient for qualitative analysis. In addition, atthe end of this section, we present a one term approximateformula for the squeeze film damping torque based on aconvergence study of the series solutions.
6.1. The damping torque is insensitive to changes inthe ambient pressure
After neglecting the terms due to the air spring effect, whichis a function ofθ , and recalling thatσ = 12µωl2m/pah
20,
we see from (42) that
Td = −192l3mw3mµ
π4h30
θ
∑odd m
∑even n
1
m2n2
(mπ)2+(nπb
)2
[(mπ)2+
(nπb
)2]2
+ σ 2
. (49)
In this formula, the damping torque does not explicitlydepend on the ambient pressure, but only on the dynamicviscosity µ and the squeeze numberσ which bothdepend on the ambient pressure. The damping torque isproportional to the dynamic viscosity, but the viscosity isnot sensitive to changes in the ambient pressure. As anexample, for air at 1 atm,µ = 1.79× 10−5 Pa s, at12 atm,µ = 1.61× 10−5 Pa s. On the other hand, as far as (49) isconcerned, the effect of the change ofσ (with ambientpressure) on the damping torque is negligible, providedthat σ is a small quantity. Therefore, we conclude thatthe damping torque is not very sensitive to changes in theambient pressure. This is consistent with our experimentalobservations. It should be pointed out, however, that theabove discussion is for ambient pressure greater than acertain value. As the pressure decreases and becomessmaller than that critical value, the damping behaviorchanges because of the slip flow condition. The mean freepath of the molecules increases as the pressure decreases.According to Starr [5], when the mean free path of theambient gas molecules within the film is about 1% of thefilm thickness, the slip flow phenomenon occurs, and thisreduces the effectiveness of the damping. For our problem,the film thickness is around 42µm, therefore if the pressuredecreases to 0.12 atm, the mean free path of the gas (air)reduces to about 1% of the film thickness. As a result, thedamping will be affected by the slip flow condition and willbe significantly reduced. Veijolaet al [14] have discussedthe modification of the Reynold equation to account for theeffect of the slip flow condition. We shall not discuss thissubject further in the present paper.
6.2. The analytical damping model is still valid for thecase of nonharmonic dynamic response
Although our analytical damping model is derived basedon the harmonic dynamic response assumption, we hereshow that this damping model is still valid for the case ofnonharmonic response.
1 2 3 4 5 6 7 8
Time t (milliseconds)
0
0.0025
0.005
0.0075
0.01
0.0125
0.015
0.0175
0.02
Til
ting
ang
le
(r
adia
n)
Using analytical damping model
Using numerical damping model
Figure 6. Dynamic tilting response of the mirror to a stepload excitation, Te = 4.84× 10−9 N m.
From (49), we see that the dependence of the dampingtorque on the harmonic response frequencyω is negligible.This is because the only parameter in (49) which dependson ω is the squeeze numberσ , but for a reason similarto that mentioned previously, the effect of a change inσ(as a result of a change ofω) on the damping torque isnegligible. Therefore, for the case in which the tiltingangle is a general function of time, we can imagine thatthis function is a superposition of many harmonic functionsof time (e.g. we can expand this response function intoa Fourier sine series over a certain range of time). Onthe other hand, for the linearized Reynold equation, theprinciple of superposition works, and thus we can combinethe damping torque components due to different harmonicresponse functions, and obtain a formula which is the sameas formula (49). Therefore, we have shown that when theair spring effect is neglected, the analytical damping modelis valid even if the dynamic response of the mirror is anarbitrary function of time. This result is remarkable, sincein general, even under harmonic excitation, the transientresponse of a device is not harmonic. However, thistransient response is an essential aspect of the mirror’sbehavior that must be determined in our design process.
As an example, figure 6 shows the numerical results ofthe time response of the mirror to a step load excitationbased on the analytical damping model and the numericalsolution to the nonlinear Reynold equation. The two sets ofthe results shown in this figure match very well. Moreover,figure 7 shows the experimentally measured results for thetime response of the mirror to a rectangular wave excitation.The damping coefficientξ obtained from figure 6 is equalto 0.22, and that from figure 7 is equal to 0.19. Theseresults are consistent with the results determined from thefrequency response function. We see that the analyticalmodeling is able to capture the effect of squeeze filmdamping even in the case of non-harmonic excitation.
6.3. The series solutions converge very fast
Through the numerical calculation by computer, we findthat both the Fourier series solution and the double sineseries solution converge rapidly. It should be pointed outthat this property of convergence will also be observed ifthe air spring effect is not neglected.
206

Squeeze film damping effect on MEMS torsion mirror
Figure 7. Experimental measurement results for thedynamic tilting response of the mirror to a rectangular waveexcitation.
0.5 1 1.5 2 2.5 3 3.5 4
Time t (millisecond)
-8-1. 10
-9-5. 10
0
-95. 10
-81. 10
Dam
ping
torq
ue (
N.m
)
Fourier series solution, 1 termFourier series solution, 100 termsDouble sine series solution, 1 termDouble sine series solution, 100 terms
Figure 8. Damping torque on the mirror under resonantfrequency harmonic excitation, based on the Fourier seriessolution and the double sine series solution.
Figure 8 shows the damping torque versus timeobtained by keeping either 1 or 100 terms in either theFourier series solution or the double sine series solution.From this figure, we see that both the series solutionsconverge very rapidly. In the range of interest of ouranalysis, even the first term in each of the series solutionsprovides sufficient accuracy for the prediction of thedamping torque. The Fourier series solution convergesfaster than the double sine series solution, and the first termof this solution provides a somewhat better approximationthan the double sine series solution. However, the formerhas a much more complicated expression than the latter.We thus prefer to present an approximate formula for thedamping torque based on the first term of the double sineseries. It is given by
Td = − 48
π6(b2+ 4)
µlmw5m
h30
θ . (50)
This formula is very similar to the formula given by Dotzelet al [11]: Td = Krotη[lmw5
m/(d + w)3]α. However,according to (50), forb = lm/wm = 1, the correspondingcoefficientKrot = 9.99× 10−3, which is different from the
valueKrot = 1.764×10−2 provided in [11] for the case oflm/wm = 1.
We expect that in the cases where the squeeze numberσ is small, the very simple equation (50) for the dampingtorque is accurate enough to predict the effect of squeezefilm damping on a torsion mirror.
7. Conclusion
Analytical models for the influence of squeeze film dampingon a MEMS torsion mirror have been developed by solvingthe linearized Reynold equation using both the Fourierseries technique and the double sine series technique.These analytical models have been verified by numericallysolving the nonlinear Reynold equation by an implicit finitedifference method. It is seen that the dynamic response ofthe torsion mirror obtained from our analytical dampingmodel is consistent with the dynamic response obtainedby numerically solving the nonlinear isothermal Reynoldequation. Although the analytical model is developedunder the assumption of harmonic dynamic response,it has been shown that when the air spring effect isnegligible, this analytical model can be extended to predictany nonharmonic dynamic response of the mirror underarbitrary excitation, such as step load excitation. Thisextension is very important since in our application, weare most interested in predicting the nonharmonic transientresponse of the mirror. The sensitivity of the dampingtorque to changes in the ambient pressure is discussedand found to be insignificant in a certain regime of theambient pressure. The damping torque is proportional tothe dynamic viscosity of the squeeze film which is a weakfunction of the ambient pressure. The convergence ofthe series solutions is also discussed, and an approximateformula obtained from the first term of the double sineseries solution is presented. This formula is expected tobe good enough to predict the damping torque from thesqueeze film on a torsion mirror, in a general case.
On the other hand, experimental measurements havebeen performed to verify the modeling results. The qualityfactor and the damping ratio obtained from experimentalmeasurements on the frequency response function, and onthe dynamic response of the mirror to rectangular waveexcitation, are close to those of the modeling results.
Through our analysis, we get different results from theresults presented by Darlinget al [10] where they found thatthe frequency response function for the tilting motion of aplate is the same as that for the uniform normal motion ofthe plate. In formula (9) of [10] for the damping torque on atilting plate, we have shown that the summation parameterm should be even instead of odd.
Acknowledgments
The authors of this paper would like to thank ProfessorS D Senturia at MIT for discussing the Reynold equation,Bob Lufthus at Xerox WCR&T for providing experimentaldata, Gregory Zack at Xerox Design Research Institutefor discussing the double sine series analytical model and
207

F Pan et al
Michael Cavanaugh at Xerox Design Research Institute andFrank Adelstein at Cornell University for their help with thecomputational aspects of this research.
References
[1] Michael W A 1961 Approximate solution oftime-dependent gas film lubrication problemsIBMResearch ReportRJ-205
[2] Bellman A 1972Dynamic Programming and PartialDifferential Equations(New York: Academic)
[3] Langlois W E 1962 Isothermal squeeze filmsQ. Appl.Math. 20 131–50
[4] Pan F, Kubby J, Peeters E, Vitomirov O, Taylor D andMukherjee S 1997 Design, modeling and verification ofMEMS silicon torsion mirrorSPIE Conf. (Austin, TX,1997)
[5] Starr J B 1990 Squeeze-film damping in solid-stateaccelerometersTech. Digest IEEE Solid State Sensor andActuator Workshop (Hilton Head Island, SC, 1990)pp 44–7
[6] Andrews M, Harris I and Turner G 1993 A comparison ofsqueeze-film theory with measurements on amicrostructureSensors ActuatorsA 36 79–87
[7] Andrews M, Turner G, Harris P and Harris I 1993 Aresonant pressure sensor based on a squeeze film of gasSensors ActuatorsA 36 219–26
[8] Yang Y J and Senturia S D 1996 Numerical simulation ofcompressible squeeze-film dampingTech. Digest SolidState Sensor and Actuator Workshop (Hilton HeadIsland, SC, 1996)pp 76–9
[9] Blech J J 1983 On isothermal squeeze filmsJ. LubricationTechnol.105 615–20
[10] Darling R B, Hivick C and Xu J 1997 Compact analyticalmodels for squeeze film damping with arbitrary ventingconditions1997 Int. Conf. on Solid-State Sensors andActuators, Transducers ’97vol 2, pp 1113–6
[11] Dotzel W, Gessner T, Hahn R, Kaufmann C, Kehr K,Kurth S and Mehner J 1997 Silicon mirrors andmicromirror arrays for spatial laser beam modulation1997 Int. Conf. on Solid-State Sensors and Actuators,Transducers ’97vol 1, pp 81–4
[12] Griffin W S, Richardson H H and Yamanami S 1996 Astudy of squeeze film dampingASME J. Basic Eng.88451–6
[13] Gross 1962Gas Film Lubrication(New York: Wiley)[14] Veijola T, Kuisma H, Lahdenpera J and Ryhanen T 1995
Equivalent-circuit model of the squeeze film in a siliconaccelerometerSensors ActuatorsA 48 239–48
208