Embed Size (px)
Citation preview

This article was downloaded by: [Eastern Michigan University]On: 29 October 2014, At: 10:38Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Systems SciencePublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tsys20
Stabilisation and control synthesis of switching systemssubject to actuator saturationAbdellah Benzaouia a , Ouassima Akhrif b & Lahcen Saydy ca Faculty of Science Semlalia , EACPI, University Cadi Ayyad , BP 2390, Marrakech, Moroccob Département de Génie Electrique , Ecole de Technologie Supérieure , 1100, Rue Notre-Dame Ouest, Montréal, Québec, Canada H3C 1K3c Electrical Engineering Department , Ecole Polytechnique de Montréal , P.O. Box 6079,Montréal, Québec, Canada H3C 3A7Published online: 16 Mar 2010.
To cite this article: Abdellah Benzaouia , Ouassima Akhrif & Lahcen Saydy (2010) Stabilisation and control synthesisof switching systems subject to actuator saturation, International Journal of Systems Science, 41:4, 397-409, DOI:10.1080/00207720903045791
To link to this article: http://dx.doi.org/10.1080/00207720903045791
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

International Journal of Systems ScienceVol. 41, No. 4, April 2010, 397–409
Stabilisation and control synthesis of switching systems subject to actuator saturation
Abdellah Benzaouiaa*, Ouassima Akhrif b and Lahcen Saydyc
aFaculty of Science Semlalia, EACPI, University Cadi Ayyad, BP 2390, Marrakech, Morocco; bDepartement de GenieElectrique, Ecole de Technologie Superieure, 1100, Rue Notre-Dame Ouest, Montreal, Quebec,Canada H3C 1K3; cElectrical Engineering Department, Ecole Polytechnique de Montreal,
P.O. Box 6079, Montreal, Quebec, Canada H3C 3A7
(Received 18 December 2007; final version received 28 November 2008)
This article presents sufficient conditions for the stabilisation of switching discrete-time linear systems subject toactuator saturations. These conditions are obtained by using successively state and output feedback control laws.The obtained results are formulated in terms of linear matrix inequalities (LMIs). The saturating and non-saturating controllers are synthesised for both cases in this work. Three sets of LMIs are presented for outputfeedback case. Numerical examples are used to illustrate these techniques by using a linear optimisation problemsubject to LMI constraints.
Keywords: switching systems; actuator saturations; state feedback control; output feedback control; multipleLyapunov functions; LMIs
1. Introduction
Switched systems are a class of hybrid systems
encountered in many practical situations, which involve
switching between several subsystems depending on
various factors. Generally, a switching system consists
of a family of continuous-time subsystems and a rule
that supervises the switching between them. This class
of systems has numerous applications in the control of
mechanical systems, the automotive industry, aircraft
and air traffic control (Zhu, Akhrif and Hentabli 2000),
switching power converters and many other fields.
Although this class of systems can be seen as a
particular case of linear parameter varying (LPV)
systems, it has specific characterisations: the first is
that the switch occurs between a finite number of
subsystems; the second is that the switching sequence,
which plays an important rule in the problem, has to be
taken into account as is the case in practical situations.
For instance, one can only act on this sequence to
stabilise the switched system. For these reasons, this
subject constitutes an important area of research
independently of LPV systems. Hence, two main
problems are widely studied in the literature according
to the classification given in Blanchini and Savorgnan
(2006): the first one deals with the obtention of testable
conditions that guarantee the asymptotic stability of a
switching system under arbitrary switching rules, while
the second is to determine a switching sequence that
renders the switched system asymptotically stable
(Liberzon and Morse 1999 and the reference therein).Also, for hybrid systems described by switched lineardifference equations, Bemporad (2004) proposes algo-rithms for transforming such systems described inmixed logical dynamical form into an equivalentpiecewise affine form.
A main problem that is always inherent to alldynamical systems is the presence of actuators satura-tions. Even for linear systems this problem has been anactive area of research for many years. Two mainapproaches have been developed in the literature: thefirst is the so-called positive invariance approach thatis based on the design of controllers, which work insidea region of linear behaviour where saturations do notoccur (Benzaouia and Burgat 1988; Benzaouia andHmamed 1993; Blanchini 1999 and the referencestherein). This approach was applied to a class of hybridsystems involving jumping parameters (Boukas andBenzaouia 2002). It was also used to design controllersfor switching systems with constrained control givenunder complete modelling as reset functions anddifferent system’s dimension (Benzaouia, DeSantis,Caravani and Daraoui 2007). The second approach,however, allows saturations to take effect whileguaranteeing asymptotic stability (Nguyen andJabbari 1999, 2000; Tarbouriech, Prieur and Gomesda Silva 2006; Hu, Lin and Chen 2002a; Hu andLin 2002; Benzaouia, Tadeo and Mesquine 2006; Caoand Lin 2003 and the references therein). The mainchallenge in these two approaches is to obtain a large
*Corresponding author. Email: [email protected]
ISSN 0020–7721 print/ISSN 1464–5319 online
� 2010 Taylor & Francis
DOI: 10.1080/00207720903045791
http://www.informaworld.com
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

enough domain of initial states, which ensures asymp-
totic stability for the system despite the presence of
saturations (Gilbert and Tan 1991; Benzaouia and
Baddou 1999; Benzaouia, Baddou and Elfaiz 2002; Hu,
Lin and Chen 2002b).The objective of this article is to study a switching
system subject to actuator saturations by following two
methods: the first concerns the synthesis of non-
saturating controllers (controllers working inside alarge region of linear behaviour where the saturations
do not occur), while the second extends the resultsobtained for unsaturated switching systems by
Mignone, Ferrari-Trecate and Morari (2000), Ferrari-Trecate, Cuzzola, Mignone and Morari (2001) and
Daafouz, Riedinger and Iung (2001, 2002) leading tosaturating controllers (controllers tolerating saturations
to take effect). The second method was firstly used in
Benzaouia, Saydy and Akhrif (2004) with the use of acomposite Lyapunov function Vðt, xÞ ¼ xTðtÞ
ðPN
i¼1 �iðtÞPiÞxðtÞ. However, only the intersection of allthe corresponding level sets of the functions Viðt, xÞ ¼
xTðtÞ � PixðtÞ, i ¼ 1, . . . ,N was considered as a regionof asymptotic stability of the switching system. This
drawback was improved in Benzaouia, Akhrif andSaydy (2006) by considering a large set of asymptotic
stability composed by the union of all the level sets. Inthis work, the main contribution is to prove that the
same conditions also allow that the union of all the
corresponding level sets of functions Viðt, xÞ ¼xTðtÞPixðtÞ, i ¼ 1, . . . ,N constitutes a large region of
asymptotic stability of the switching system for bothstate feedback control and output feedback control.
In this context, two main different sufficient
conditions of asymptotic stability are obtained forswitching systems subject to actuator saturations.
Furthermore, these conditions are presented in theform of three sets of linear matrix inequalities (LMIs)
for the state feedback control case.A particular attention is given to the output
feedback case, which has an additive complexity due
to the output equation. For this class of switchingsystems, the problem has already been studied in
Daafouz et al. (2001, 2002) and extended to positiveswitching systems by Benzaouia and Tadeo (2008).
Recently, Bara and Boutayeb (2006) has presented a
promising technique based on a certain decompositionof the input-to-state matrix B. In this sense, three
different LMIs are presented for this case. It is alsoshown that the LMIs obtained for computing con-
trollers working inside a large region of linear behav-iour are less conservative.
The article is organised as follows: the second
section deals with the problem formulation while thethird section presents some preliminary results.
The main results of this work together with numerical
examples are presented in the fourth section.
2. Problem formulation
In this section, we give a more precise problemstatement for the class of systems under consideration,namely, discrete-time switching linear systems withinput saturation and state or output feedback. Anequivalent description of such systems, based on theindicator function is also used in this work.
Thus, we consider systems described by:
xðtþ 1Þ ¼ A�xðtÞ þ B� satðuðtÞÞ
yðtÞ ¼ C�xðtÞ ð1Þ
where x2Rn is the state, u2R
m is the control, y2Rp is
the output, sat(�) is the standard saturation functionand � a switching rule, which takes its values in thefinite set I :¼ f1, . . . ,Ng, t2Z+. The saturation func-
tion is assumed here to be normalised, i.e.(jsat(u)j ¼min{1, juj}).
Definition 2.1: (Lygeros, Tombin and Sastry 1999) Ahybrid time basis � is an infinite or finite sequence ofsets Is ¼ t 2 N : ts � t � �ts
� �, with �ts ¼ tsþ1 for
s 2 L ¼ 0, . . . ,Lf g, and if cardð�Þ ¼ Lþ 151 then�tL can be finite or infinite.
It is assumed that:
. the switching system is stabilisable;
. matrices C� are of full rank;
. tsþ1 � ts þ 1, 8s 2 L;
. the switching rule is not known a priori but�(t) is available at each t.
The second assumption ensures that at each time only
one subsystem is active. The fourth assumptioncorresponds to practical implementations where theswitched system is supervised by a discrete-eventsystem or operator allowing for �(t) to be known inreal time.
In this work, we are interested by the synthesis ofstabilising controllers for this class of hybrid systemssubject to actuator saturation. We use a feedbackcontrol law as:
uðtÞ ¼ F�xðtÞ ¼ K�yðtÞ, ð2Þ
and write the closed-loop system as
xðtþ 1Þ ¼ A�xðtÞ þ B� satðF�xðtÞÞ:
¼ A�xðtÞ þ B� satðK�yðtÞÞ ð3Þ
Upon introducing the indicator function:
�ðtÞ ¼ ½�1ðtÞ, . . . , �NðtÞ�T ð4Þ
398 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

where �i(t)¼ 1 if the switching system is in mode i and�i(t)¼ 0 if it is in a different mode, one can write theclosed-loop system (3) as follows:
xðtþ 1Þ ¼XNi¼1
�iðtÞ½AixðtÞ þ Bi satðFixðtÞÞ�:
¼XNi¼1
�iðtÞ½AixðtÞ þ Bi satðKiCixðtÞÞ� ð5Þ
3. Preliminary results
In this section, we recall two results on which our workis based. Let � be fixed. Then system (3) becomes alinear time-invariant system with input saturationgiven by:
xðtþ 1Þ ¼ AxðtÞ þ B satðFxðtÞÞ ð6Þ
Define the following subsets of Rn:
"ðP, �Þ ¼ fx 2 RnjxTPx � �g, ð7Þ
LðF Þ ¼ fx 2 Rnjj flxj � 1, l ¼ 1, . . . ,mg, ð8Þ
with P a positive definite matrix, �4 0 and fl the l-throw of the matrix F2R
m�n. Thus "(P, �) is an ellipsoidwhile LðF Þ is a polyhedral consisting of states forwhich the saturation does not occur.
Lemma 3.1: (Hu et al. 2002b) For all u2Rm and
�2Rm such that j�lj5 1, l2 [1, m]
satðuÞ 2 cofDsuþD�s v, s 2 ½1, ��g ; � ¼ 2m ð9Þ
where co denotes the convex hull.
Consequently, there exists �1� 0, . . . , ��� 0 withP�s¼1 �s ¼ 1 such that,
satðuÞ ¼X�s¼1
�s½DsuþD�s v� ð10Þ
Here, Ds is an m�m diagonal matrix with elementseither 1 or 0 and D�s ¼ Im �Ds: There are 2m possiblesuch matrices. One can also consult the work ofBenzaouia et al. (2006) for more details and otherextensions to linear systems with both constraints onthe control and the increment or rate of the control.
Consider the following autonomous switchingsystem:
xðtþ 1Þ ¼XNi¼1
�iðtÞAixðtÞ ð11Þ
The use of the Lyapunov functions revealed twoways:
. The existence of a common Lyapunov func-tion to the various subsystems guarantees the
asymptotic stability of the switching system.
In general, the search for such a function is
not always obvious (Shorten and Narenda,
1997, 1998).. The Lyapunov-like functions or multiple
Lyapunov functions were introduced in
Branicky (1998). They are considered as a
strong tool in the analysis of the stability of
the hybrid systems and in particular the
switching systems.
Proposition 3.1: (Branicky 1998) If there exists a
Lyapunov-like function V(t, x),2 Is, with V :N�Rn!
R+, such that the following hold:
. DV(t, x(t))5 0, for any time t2 Is
. Vðtk, xðtkÞÞ5Vðtk�1, xðtk�1Þ, 8k 2 L
then, the switching autonomous system (11) is asympto-
tically stable.
We now recall a useful stability result for switching
systems with no input saturations presented by many
authors (see Mignone et al. 2000 and Daafouz et al.
2001, 2002) firstly used for linear time-varying systems
(Daafouz and Bernussou 2001).
Theorem 3.1: The closed-loop switching system (11) is
asymptotically stable at the origin if there exist N
symmetric and definite positive matrices P1, . . . ,PN
satisfying,
ATi PjAi � Pi 5 0, 8 ði, j Þ 2 I � I ð12Þ
A corresponding Lyapunov function for the system is
then given by:
Vðt, xÞ ¼ xTðtÞ
�XNi¼1
�iðtÞPi
�xðtÞ ð13Þ
It is worth noting that function V(t, x), which is a
Lyapunov-like function candidate involving matrices
Pi, can be seen as a standard Lyapunov function
candidate. It was the way followed by Daafouz et al.
(2001, 2002). Further, condition (12) is equivalent, by
using Schur complement to,
Pi ATi Pj
� Pj
" #4 0, 8 ði, j Þ 2 I � I ð14Þ
where * denotes the transpose of the off diagonal
element of the LMI. Subsequently, we will need the
following equivalent LMI representation of (14):
Xi XiATi
� Xj
" #4 0, 8 ði, j Þ 2 I � I ð15Þ
International Journal of Systems Science 399
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

where Xi ¼ P�1i . The LMI (15) is also in turn equiv-
alent to the following LMI, generally used to relax the
previous one (Daafouz et al. 2001):
Gi þ GTi � Xi GT
i ATi
� Xj
" #4 0, 8 ði, j Þ 2 I � I ð16Þ
where matrices Gi called slack variables are
non-singular matrices and Xi the positive definite
matrices.It is worth noting that condition (12) has to be
satisfied 8 ði, j Þ 2 I � I , in particular for i¼ j. This
means that each mode is necessarily asymptotically
stable and Vi(t,x)¼ xT(t)Pix(t) is the associated
Lyapunov function.Recall that a level set of the Lyapunov function
V(t,x) given by (13) and associated to the switching
system (11) is given by the set "(P, �) defined by (7)
with P ¼PN
i¼1 �iðtÞPi. This region of asymptotic sta-
bility is very difficult to construct. Nevertheless, an
estimate can be obtained as large as possible as
presented in the next section based on the union of
the sub-level ellipsoid sets "(Pi, 1). Other type of level
sets obtained with different Lyapunov functions for
switched systems can be found in Hu, Ma and
Lin (2006).
4. Main results
In this section, the region of local asymptotic stability
associated to the saturated switching system is firstly
studied. The design of a stabilising controller for the
class of switching system with actuator saturation is
then presented in the following two ways: the first
concerns controllers working inside the region of linear
behaviour where the saturations do not occur while the
second is based on Lemma 3.1 tolerating saturations to
occur.
4.1. Region of asymptotic stability
The link between the result of Theorem 3.1 and the
level set (7) is not mentioned in Mignone et al. (2000)
nor in Daafouz et al. (2001, 2002). The absence of
saturation on the control of the switching systems in
these works does not necessitate to take care with the
level sets since the asymptotic stability is global. We
present here after an interesting result on this subject
inspired from the general class studied in Benzaouia
et al. (2007).
Theorem 4.1: If there exists N symmetric matrices
P1, . . . ,PN such that the inequalities (12) are satisfied
then the set given by,
� ¼[Ni¼1
"ðPi, 1Þ ð17Þ
is a level set of the Lyapunov-like function V(t, x) given
by (13) with respect to the trajectories of the autonomous
switching system (11).
Proof: Note that condition (12) for i¼ j ensures that
DV(t,x)5 0, for t 2 Is, s 2 L (Daafouz et al. 2001,
2002). Now let xð�tk�1Þ 2 "ðPi, 1Þ. What happens at the
switching time �tk�1?For this, compute x(tk). With an identity reset
function we have,
xðtkÞ ¼ xð �tk�1Þ ð18Þ
The switch to the next region "(Pj, 1) will be seen an
unit time after,
xðtk þ 1Þ ¼ xð �tk�1 þ 1Þ
¼ Aixð�tk�1Þð19Þ
We have,
xTðtk þ 1ÞPjxðtk þ 1Þ ¼ xTð�tk�1Þ ATi PjAi
� �xð�tk�1Þ ð20Þ
According to condition (12), one can obtain,
xTðtk þ 1ÞPjxðtk þ 1Þ5 xTð�tk�1ÞPixð�tk�1Þ ð21Þ
Since xð �tk�1Þ 2 "ðPi, 1Þ, then, xðtk þ 1Þ 2 "ðPj, 1Þ,
8i, j 2 I � I . This proves that V(tk, x(tk))5V(tk�1,
x(tk�1)), 8k 2 L. Consequently, function V(t, x) is a
Lyapunov-like function of the switching system
according to Proposition 3.1 and the set � is a level
set associated to this function. œ
Note that an important remark is to be made at this
level: since the studied system is a switching one
composed of N subsystems (modes), the switching
system can be initialised inside any level set "(Pi, 1);
however, the initial mode to be selected is the
corresponding mode i.
4.2. State feedback control
We assume that the state is available, so a state
feedback control can be performed. The first result we
present is a simple extension of the known result given
by Gutman and Hagandar (1985) for linear systems
and concerns the synthesis of non-saturating control-
lers ensuring that a large region of linear behaviour is a
region of asymptotic stability.
400 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Theorem 4.2: If there exists N symmetric matrices
X1, . . . ,XN and N matrices Y1, . . . ,YN solutions of the
following LMIs:
Xi ðAiXi þ BiYiÞT
� Xj
" #4 0, ð22Þ
1 yli
� Xi
� 4 0,
8 ði, j Þ 2 I � I , 8l 2 ½1,m�
ð23Þ
where yli is the l-th row of matrix Yi ; then the switching
system with saturations in closed loop (3), with,
Fi ¼ YiX�1i , Pi ¼ X�1i ð24Þ
is asymptotically stable at the origin 8x02� and for any
sequences of switching �(t).
Proof: In order to guarantee that the control by state
feedback is always admissible, each sub-level set of
the Lyapunov function has to be contained inside the
polyhedral set where the saturations do not occur
"ðPi, 1Þ LðFiÞ, 8i 2 I (Gutman and Hagandar 1985).
Using Boyd, El Ghaoui, Feron and Balakrishnan
(1994), this inclusion condition can also be trans-
formed to the equivalent LMI (23) by letting Xi ¼ P�1i
and FiXi¼Yi. Let x(t)2�, 8t2 Is. According to
condition (23), the system in closed loop (5) can be
equivalently written as,
xðtþ 1Þ ¼XNi¼1
�iðtÞAcixðtÞ: ð25Þ
with, Aci¼AiþBiFi. The proof follows from the
asymptotic stability conditions of the switching
system given by Theorem 3.2, which is expressed
equivalently by (15), with matrix Aci instead of Ai.
Further, Theorem 4.1 ensures that the set � is a set
of asymptotic stability of the switching system with
saturations in closed loop (3). œ
To achieve a domain of attraction as large as
possible, we can solve the following optimisation
problem:
ðPb:1Þ :
supðXi,YiÞTraceðXiÞ
s:t: ð22Þ, ð23Þ,
i ¼ 1, . . . ,N
8><>:
When this optimisation problem is feasible, the
obtained ellipsoid volumes are maximum with respect
to the data of the system.The obtained LMIs (22) of Theorem 4.2 are similar
to those obtained in Mignone et al. (2000) and Ferrari-
Trecate et al. (2001) for non-saturated switching
systems. The presence of saturation on the control in
our problem leads to the additional LMIs (23), which
will obviously restrict the set of solutions.
Nevertheless, the associated large region of asymptotic
stability � for the saturated switching system enables
one to conclude that these LMIs are not conservative.The second result we present concerns the synthesis
of saturating controllers tolerating saturations to take
effect inside a large region of asymptotic stability.
Theorem 4.3: If there exist symmetric matrices
P1, . . . ,PN2Rn�n and matrices H1, . . . ,HN2R
m�n
such that,
Pi ½Ai þ BiðDisFi þD�isHiÞ�TPj
� Pj
" #4 0,
8 ði, j Þ 2 I � I , 8s 2 ½1, �� ð26Þ
and,
"ðPi, 1Þ LðHiÞ, 8i 2 I ð27Þ
then, the closed-loop switching system (3) is asymptoti-
cally stable at the origin 8x02� and for all sequences of
switching �(t).
Proof: Assume that there existsNmatricesH1, . . . ,HN
and N symmetric matrices P1, . . . ,PN such that condi-
tion (26) and (27) are satisfied. Using the expression in
(10) and rewriting System (3) as in (5) yields that:
satðFixðtÞÞ ¼X�s¼1
�siðtÞ½DisFi þD�isHi�xðtÞ; ð28Þ
�siðtÞ � 0,X�s¼1
�siðtÞ ¼ 1 ð29Þ
and, subsequently:
xðtþ 1Þ ¼X�s¼1
XNi¼1
�iðtÞ�siðtÞAcisxðtÞ;
Acis :¼ Ai þ BiðDisFi þD�isHiÞ, s 2 ½1, �� ð30Þ
The rate of change of the Lyapunov function candidate
(13) along the trajectories of (30) is given by:
DVðt,xðtÞÞ ¼ xTðtþ 1Þ
�XNj¼1
�j ðtþ 1ÞPj
�xðtþ 1Þ
� xTðtÞ
�XNi¼1
�iðtÞPi
�xðtÞ
¼ xTðtÞX�s¼1
XNi¼1
�iðtÞ�siðtÞAcis
!T24
�XNj¼1
�j ðtþ 1ÞPj
! X�s¼1
XNi¼1
�iðtÞ�siðtÞAcis
!
�XNi¼1
�iðtÞPi
#xðtÞ ð31Þ
International Journal of Systems Science 401
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Let condition (26) be satisfied. At this level, for each i,
multiply the j¼ 1, . . . ,N inequalities (26) by �j(tþ 1)
and sum. Multiply the resulting i¼ 1, . . . ,N inequal-
ities by �i(t) and sum. Multiply again the resulting
s¼ 1, . . . , � inequalities by �s(t) and sum. AsPNi¼1 �iðtÞ ¼
PNj¼1 �j ðtþ 1Þ ¼
P�s¼1 �siðtÞ ¼ 1, one gets:
PNi¼1 �iðtÞPi �
PNj¼1 �j ðtþ 1ÞPj
�PN
j¼1 �j ðtþ 1ÞPj
" #4 0, ð32Þ
with � ¼ ½P�
s¼1
PNi¼1 �iðtÞ�siðtÞAcis�
T. The use of Schur
complement allows us to write condition (32) under the
equivalent form,
X�s¼1
XNi¼1
�iðtÞ�siðtÞAcis
!T XNj¼1
�j ðtþ 1ÞPj
!
�X�s¼1
XNi¼1
�iðtÞ�siðtÞAcis
!�XNi¼1
�iðtÞPi 5 0,
8 ði, j Þ 2 I � I , 8s 2 ½1, �� ð33Þ
Letting be the largest eigenvalue among all the above
matrices, we obtain that
DVðt, xðtÞÞ � xTðtÞxðtÞ5 0: ð34Þ
which ensures the desired result. Noting that condition
(26) is also satisfied for i¼ j, this implies that each set
"(Pi, 1) is a contractively invariant set for the corre-
sponding subsystem. Further, by taking account of
condition (27), one can guarantee that for every
xo 2 "ðPi, 1Þ LðHiÞ, each subsystem is asymptotically
stable at the origin. Besides, following Theorem 4.1,
conditions (26) and (27) also allow for a state
belonging, before the switch, to a set "ðPi, 1Þ LðHiÞ,
if a switch occurs at any time tk, that the switch will
handle the state to the desired set "ðPj, 1Þ LðHj Þ.
That means that the set � is a set of asymptotic
stability of the switching system. œ
This stability result can be used for control
synthesis as follows.
Theorem 4.4: If there exists N symmetric matrices
X1, . . . ,XN and 2N matrices Y1, . . . ,YN and Z1, . . . ,ZN
solutions of the following LMIs:
Xi ðAiXi þ BiDisYi þ BiD�isZiÞ
T
� Xj
" #4 0, ð35Þ
1 zli
� Xi
� 4 0,
8 ði, j Þ 2 I � I , 8s 2 ½1, ��, 8l 2 ½1,m�
ð36Þ
then the switching system with saturations in closed loop
(3), with,
Fi ¼ YiX�1i , Hi ¼ ZiX
�1i , Pi ¼ X�1i ð37Þ
is asymptotically stable at the origin 8x02� and for any
sequences of switching �(t).
Proof: The Inequalities (26) can be transformed
equivalently by Schur complement to the following:
Pj Ai þ BiðDisFi þD�isHiÞ �� P�1i Ai þ BiðDisFi þD�isHiÞ
�TPj � Pj 5 0 ð38Þ
By pre and post-multiplying the latter by P�1j , it
follows:
Ai þ BiðDisFi þD�isHiÞ �� P�1i Ai þ BiðDisFi þD�isHiÞ
�T�P�1j 5 0 ð39Þ
Pose Xi ¼ P�1i , inequality (39) can then be rewritten as,
Ai þ BiðDisFi þD�isHiÞ �� Xi Ai þ BiðDisFi þD�isHiÞ
�T�Xj 5 0,
that is
AiXi þ BiðDisFiXi þD�isHiXiÞ �� X�1i AiXi þ BiðDisFiXi þD�isHiXiÞ
�T�Xj 5 0:
The use of the Schur complement a second time
leads to:
Xi ðAiXi þ BiDisFiXi þ BiD�isHiXiÞ
T
� Xj
" #4 0 ð40Þ
By letting FiXi¼Yi and HiXi¼Zi, the LMI (35)
follows readily. Using Boyd et al. (1994), the inclusion
condition (27) can also be transformed to the equiv-
alent LMI (36). œ
To obtain larger ellipsoid domains "(Pi, 1), we can
apply the following optimisation problem:
ðPb:2Þ :
supðXi,Yi,ZiÞTraceðXiÞ
s:t: ð35Þ, ð36Þ,
i ¼ 1, . . . ,N
8><>:
When this optimisation problem is feasible, the
obtained ellipsoid volumes are maximum with respect
to the data of the system.
Remark 4.1: The results presented in this section can
be extended easily to level sets "(Pi, �i) where the
scalars �i, i¼ 1, . . . ,N can be priori fixed, by using
the variables Xi¼Pi/�i in the LMIs (22)–(23) and
(35)–(36).
402 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Comment 4.1: The resolution of the LMIs (35) for
s2 [1, �] may be very restrictive. One can relax this
resolution by accepting controllers working in a region
of linear behaviour where the saturations do not occur.The obtained results in this work, where the switching
system is with saturated control, are a set of
(2m�N2þNm) LMIs for computing stabilising con-
trollers working inside the saturated regions LðHiÞ or
only a set of (N2þNm) LMIs for computing stabilising
controllers working inside regions of linear behaviour
LðFiÞ. Note also that the LMIs of Theorem 4.2 can beobtained from LMIs of Theorem 4.4 by letting Dis ¼ I
and D�is ¼ 0.
Example 4.1: Consider a numerical switching dis-
crete-time system with saturation specified by the two
subsystems:
A1 ¼�0:7 1
�0:5 �1:5
� ; B1 ¼
1
0
� ;
A2 ¼0:9 �1
1:7 �1:5
� ; B2 ¼
0
�1
� :
We have to solve 5 LMIs with 4 variables to computecontrollers working inside a region of linear behavior.
The use of the Matlab LMI Toolbox to check our
conditions leads to the following results without usingthe optimisation problem (Pb.1).
P1 ¼7:3328 18:7125
18:7125 55:9711
" #; F1 ¼ 1:2244 0:7535
�;
Ac1 ¼0:5244 1:7535
�0:5000 �1:5000
" #;
P2 ¼4:8237 �5:1001
�5:1001 5:6715
� ; F2 ¼ 1:7559 �1:5699
�;
Ac2 ¼0:9000 �1:0000
�0:0559 0:0699
� ;
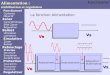
Figure 1 presents the two ellipsoid sets of invariance
and contractivity "(Pi, 1) together with the sets oflinear behaviour LðFiÞ computed with LMIs (22)–(23).
For the same example, the use of the Matlab LMI
Toolbox to check conditions (35)–(36) leads to the
following results by using the optimisation problem(Pb.2) with 10 LMIs and 6 variables.
P1 ¼7:4032 18:1841
18:1841 56:6345
" #; H1 ¼ 1:2534 0:8569
�;
F1 ¼ 1:2641 0:8526 �
; Ac1 ¼0:5641 1:8526
�0:5000 �1:5000
" #;
P2¼4:5202 �4:3908
�4:3908 6:5909
� ; H2¼ 1:7693 �1:5845
�;
F2¼ 1:7697 �1:5836 �
; Ac2¼0:9000 �1:0000
�0:0697 0:0836
� ;
Note that the optimal values of the optimisation
problem (Pb.2) are given by TraceðP�11 Þ ¼ 0:7227 and
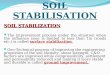
TraceðP�12 Þ ¼ 1:0568.Figure 2 presents the two ellipsoid sets of invar-
iance and contractivity "(Pi,1) together with the set of
saturations LðHiÞ computed with (Pb.2).Comparing the results obtained by LMIs (35)–(36)
and LMIs (22)–(23), one can note that the matrices Hi
–3 –2 –1 –0 1 2 3–4
–3
–2
–1
0
1
2
3
4
x1
x 2
Figure 1. The ellipsoids sets of invariance and contractivityfor the switching discrete-time linear system computed withLMIs (22)–(23).
–1.5 –1 –0.5 0 0.5 1 1.5–4
–3
–2
–1
0
1
2
3
4
Figure 2. The ellipsoids sets of invariance and contractivityfor the switching discrete-time linear system computed withLIMI’s (35)–(36) and (Pb.2).
International Journal of Systems Science 403
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

are very closed up to matrices Fi obtained with LMIs(35)–(36), that is, LðHiÞ ffi LðFiÞ. This means that in thecase of this example, the saturations allowed by thistechnique are not very important. Recall that insidethe sets LðFiÞ no saturations occur. Furthermore, theresults obtained with LMIs (22)–(23) are less con-servative. This is due to the fact that among the numberof LMIs to be solved in (35)–(36), one find the LMIs(22)–(23). In conclusion of the study of this example,a compromise has to be taken between a less conser-vative synthesis of non-saturating controllers and amore conservative synthesis of saturating controllers.
4.3. Output feedback control
Static output-feedback control plays a very importantrole in control applications: the purpose is to designcontrollers such that the resulting closed-loop system isasymptotically stable without using any reconstructionmethod of the unavailable states. In this section, webegin by the synthesis of the saturating controllerssince the non-saturating ones can be derived as aparticular case.
The synthesis of the stabilising controller by outputfeedback control for the class of switching system withactuator saturation is presented by applying the resultsof Theorem 4.3.
Theorem 4.5: If there exist symmetric matrices Xi,matrices Vi, Yi and Zi solutions of the following LMIs:
Xi ðAiXi þ BiDisYiCi þ BiD�isZiÞ
T
� Xj
" #4 0, ð41Þ
1 Zil
� Xi
� 4 0, ð42Þ
ViCi ¼ CiXi
8 ði, j Þ 2 I2, 8s 2 ½1, ��, 8l 2 ½1,m�ð43Þ
then the closed-loop saturated switching system (3) with
Ki ¼ YiV�1i , Hi ¼ ZiX
�1i , Pi ¼ X�1i ð44Þ
is asymptotically stable 8x02� and for all switchingsequences �(k).
Proof: The same development as (38)–(40) whilereplacing Fi by KiCi, can be followed to obtain,
Xi ðAiXi þ BiDisKiCiXi þ BiD�isHiXiÞ
T
� Xj
" #4 0:
According to Equation (43), we have KiCiXi¼KiViCi.By letting KiVi¼Yi and HiXi¼Zi, the LMI (41)follows together with relations (44). Similarly, the
inclusion condition (27) can also be transformed to the
equivalent LMI (42). Finally, the inequality (41)
ensures that the obtained solutions Xi are positive
definite while equalities (43) guarantee that matrices Vi
are non-singular.It is worth noting that the state feedback follows
readily from Theorem 4.5 by letting Ci ¼ Im. In this
case, Vi¼Xi.The LMI (41), relating matrices Ci to matrix Xi by
means of Equation (43), can be relaxed by using the
LMI (16), where the new variables Gi are related to
matrices Ci instead of the matrix Xi. œ
Corollary 4.1: If there exist symmetric matrices Xi,
matrices Gi,Vi,Yi and Zi solutions of the following
LMIs:
Gi þ GTi � Xi �T
is
� Xj
" #4 0, ð45Þ
1, Zil
� Gi þ GTi � Xi
� 4 0, ð46Þ
ViCi ¼ CiGi ð47Þ
8 ði, j Þ 2 I2, 8s 2 ½1, ��, 8l 2 ½1,m�
where �is ¼ ðAiGi þ BiDisYiCi þ BiD�isZiÞ, then the
closed-loop saturated switching system (3) with
Ki ¼ YiV�1i , Hi ¼ ZiG
�1i , Pi ¼ X�1i ð48Þ
is asymptotically stable 8x02� and all switching
sequences �(k).
Proof: The proof uses the equivalent LMI (16) and
is similar to that of Theorem 4.5. However, the
inclusion condition "ðPi, �Þ LðHiÞ 8i 2 I holds if
1�HilXiHTil 4 0, 8l 2 ½1,m�, which is equivalent to,
1� ðHiGiÞl ðGTi X�1i GiÞ
�1ðHiGiÞ
Tl 4 0. That is, by virtue
of (48) 1� ðZilÞðGTi X�1i GiÞ
�1ðZilÞ
T 4 0. Since,
ðGi � XiÞT X�1i ðGi � XiÞ � 0, then GiX
�1i GT
i � Giþ
GTi � Xi. It follows that 1� ZilðGi þ GT
i � XiÞ �
ZTil 4 0. By Schur complement, the LMI (46) is
obtained. œ
To achieve a domain of attraction as large as
possible, we can solve a similar optimisation problem
as for state feedback control.Another way to deal with the problem by relaxing
the more constraining relations (43) of Theorem 4.5,
especially in MIMO case, is presented by the following
result which uses the same idea as in El Ghaoui, Oustry
and AitRami (1997) and Chadli, Maquin and Ragot
(2002).
404 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Theorem 4.6: If there exist symmetric matrices Xi and
Si, matrices Yi and Zi solutions of the following LMIs:
Xi ðAi þ BiDisYiCi þ BiD�isZiÞ
T
� Sj
" #4 0, ð49Þ
1 Zil
� Xi
� 4 0, ð50Þ
Xi, I
� Si
� � 0 ð51Þ
8 ði, j Þ 2 I2, 8s 2 ½1, ��, 8l 2 ½1,m�
such that Trace (XiSi)¼ n, then the closed-loop saturatedswitching system (3) with
Ki ¼ Yi, Hi ¼ Zi, Pi ¼ Xi ð52Þ
is asymptotically stable 8x02� and all switchingsequences �(t).
Proof: The inequality (26) can be equivalently trans-formed via the Schur Complement to the following:
Ai þ BiðDisKiCi þD�isHiÞ �T� Pj Ai þ BiðDisKiCi þD�isHiÞ
�� Pi 5 0 ð53Þ
The use of the Schur complement a second time leadsto
Pi ðAi þ BiDisKiCi þ BiD�isHiÞ
T
� P�1j
" #4 0 ð54Þ
By letting Xi¼Pi, Sj ¼ P�1j , Yi¼Ki and Zi¼Hi, theLMI (49) follows together with relations (52). The
inclusion condition (27) can also be transformed to theequivalent LMI (50) (Boyd et al. 1994): HilP
�1i HT
il � 1can be rewritten by Schur complement, while usingZi¼Hi as (50). Note that the LMI (49) ensures that the
obtained solutions Xi and Si are positive definite.Finally, the LMI (51) is equivalent to SiXi � I. œ
This result presents the advantage of computingdirectly the matrices Ki and Hi. Nevertheless, an
optimisation problem must be solved to achieveXiSi ’ I by minimizing iteratively the trace of matrixXiSi using an algorithm presented in El Ghaoui et al.(1997). This heuristic is based on a linear approxima-tion of Trace(XiSi) by Trace(X0Si+S0Xi) where X0
and S0 are particular solutions of the LMI constraints(49), (50) and (51).
ðPb:3Þ :
minðSj,Xi,Yi,ZiÞ TraceðXiSiÞ
s:t: ð49Þ, ð50Þ, ð51Þ
i, j ¼ 1, . . . ,N
8><>:
An output feedback non-saturating controller canbe obtained, as noted in Comment 4.1, as a particularcase of the saturating controller results by lettingDis ¼ I and Dþis ¼ 0. It is also obvious that the
inclusion condition becomes "ðPi, 1Þ LðKiCiÞ. Thefollowing results are then directly obtained.
Corollary 4.2: If there exist symmetric matrices Xi,matrices Vi and Yi solutions of the following LMIs:
Xi ðAiXi þ BiYiCiÞT
� Xj
" #4 0, ð55Þ
1 ðYiCiÞl
� Xi
� 4 0, ð56Þ
ViCi ¼ CiXi ð57Þ
8 ði, j Þ 2 I 2, 8l 2 ½1,m�
then the closed-loop saturated switching system (3) with
Ki ¼ YiV�1i , Pi ¼ X�1i ð58Þ
is asymptotically stable 8x02� and for all switchingsequences �(t).
Proof: This proof can be obtained easily by lettingDis ¼ I and D�is ¼ 0 in Theorem 4.5. However, theinclusion condition "ðPi, 1Þ LðKiCiÞ leads toðKiCiÞlP
�1i ðKiCiÞ
Tl � 1 which is equivalent to,
ðKiCiP�1i ÞlPiðKiCiP
�1i Þ
Tl � 1,
by using (57), ðKiViCiÞlX�1i ðKiViCiÞ
Tl � 1, can be
rewritten by Schur complement, while using Yi¼KiVi
as (56). œ
In a similar way, the result of Theorem 4.6 can beapplied for designing non-saturating controls by lettingDis ¼ I and D�is ¼ 0. Finally, one can cite a recent work(Bara and Boutayeb 2006) where the authors claimthat they present a less conservative sufficient condi-tion of stabilizability than the one of Daafouz et al.(2002) on which our work is based, but only appliedfor a class of switching linear systems. This newdirection, using the congruence transformation, hasalso to be explored for saturated switching systems.
Example 4.2: In order to illustrate our results, con-sider a single-input single-output (SISO) saturatedswitching discrete-time system with two modes givenby the following matrices:
A1 ¼1 1
0 1
� ; B1 ¼
10
5
� ; C1 ¼ 1 1
�
A2 ¼0 �1
0:0001 1
� ; B2 ¼
0:5
�2
� ; C2 ¼ 2 3
�
International Journal of Systems Science 405
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

For this example with n¼ 2, m¼ p¼ 1 and N¼ 2, we
have to solve 13 LMIs with 9 variables by using the
LMIs of Corollary 4.1. Let the scalar �¼ 1. The use of
the Matlab LMI Toolbox yields the following results:
P1 ¼0:0016 0:0006
0:0006 0:0025
� ; H1 ¼ �0:0196 �0:0479
�;
K1 ¼�0:0743; Ac1 ¼0:2574 0:2574
�0:3713 0:6287
� ;
P2 ¼0:0010 0:0004
0:0004 0:0027
� ; H2 ¼ 0:000007 0:0483
�;
K2 ¼ 0:0347; Ac2 ¼0:0615 �0:9077
�0:2460 0:6309
�
The main conditions (12) are also satisfied:
AcT1P2Ac1 � P1 ¼ 10�3�0:0012 �0:0011
�0:0011 �0:0013
" #;
AcT2P1Ac2 � P2 ¼ 10�3�0:0008 �0:0007
�0:0007 �0:0011
" #
Figure 3 shows the level set as the union of two
ellipsoid sets of invariance and contractivity for the
switching discrete-time linear system obtained by
Corollary 4.1. Each ellipsoid set is contained inside
the set of admissible saturations LðHiÞ. Inside this set,
the asymptotic stability of the saturated switching
system is guaranteed for any arbitrary switch
from any linear subsystem to another. This SISO
example is studied only in order to illustrate the results
of this work by plotting the level set in the plane. The
use of Theorem 4.6 leads to the following results
for �¼ 1:
P1 ¼1:0961 0:0848
0:0848 1:0290
" #; P2 ¼
1:5366 0:1255
0:1255 1:4821
" #;
S1¼0:6553 �0:0555
�0:0555 0:6794
" #; S2¼
0:9182 �0:0756
�0:0756 0:9781
" #;
H1 ¼ �0:0786 �0:1208 �
; K1 ¼¼ �0:1007;
H2 ¼ 0:00004 0:5473 �
; K2 ¼ 0:1812
The level set obtained with this approach is
plotted in Figure 5 together with few trajectories.
The use of Corollary 4.2 leads to the following results
2 4 6 8 10 12 14 16 18 20
0
0
5 10 15 20–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–1 –0.8 –0.6 –0.4 –0.2 0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
0
0.5
1
1.5
2
2.5
3
Figure 4. The level set as the union of two ellipsoid sets of invariance and contractivity for the switching discrete-time linearsystem obtained by Corollary 4.2 and the corresponding switching sequences.
–40 –30 –20 –10 0 10 20 30 40–40
–30
–20
–10
0
10
20
30
40
x1
x 2
Figure 3. The level set as the union of two ellipsoid sets ofinvariance and contractivity for the switching discrete-timelinear system obtained by Corollary 4.1.
406 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

for �¼ 1:
P1 ¼1:0000 �0:0000012
�0:0000012 1:0000
� ;
P2 ¼2:2750 �0:0373
�0:0373 1:1188
� ;
K1 ¼ �0:0998; K2 ¼ 0:2234
The level set obtained with this approach is plotted inFigure 4 together with few trajectories.
One can notice that the obtained level sets withCorollary 4.1 are the most larger while the onesobtained with Corollary 4.2 are similar to thoseobtained with Theorem 4.6 with an important reductionof the number of LMIs. One can conclude, via thisexample, that the result of Corollary 4.1 is the lessconservative among all the other results due to theintroduced slack variables Gi. Combining the compar-isons made for state feedback control and outputfeedback control, one can expect that the introductionof slack variables in the Corollary 4.2 can lead to themore less conservative results.
5. Conclusion
In this work, two main different sufficient conditions ofasymptotic stability are obtained for switching discrete-time linear systems subject to actuator saturations foreach case: state feedback and output feedback control.The first allows the synthesis of stabilising controllersinside a large region of linear behaviour while thesecond applies the idea of Lemma 3.1 which rewrites thesaturation function under a combination of 2m elementsto obtain stabilising controllers tolerating saturations totake effect. Particular attention is given to the output
feedback case, which has additive complexity due to theoutput equation. In this sense, three different LMIs arepresented for this case. Also, the last one recentlypresented in Bara and Boutayeb (2006) is cited to beexplored in a future work. The main results of thisarticle are given under LMIs formulation leading to thedesign of the stabilising state feedback and outputfeedback controllers for the system. Even the dynamicalsystem is a switching system; it is shown that the set� formed by the union of all the ellipsoid level setsassociated to each subsystem constitutes a set ofasymptotic stability. It is the first time that thisimportant result is established for saturated switchingsystems. Two illustrative examples are studied by usingthe solution of the proposed LMIs. A comparison of theobtained solutions is also given.
Acknowledgement
The authors would like to thank the anonymous reviewersfor their valuable comments and suggestions, which helpedimproving the quality of the article.
References
Bara, G.I., and Boutayeb, M. (2006), ‘Switched Output Feed
Back Stabilisation of Discrete-time Switched Systems’, in
45th Conference on Decision and Control, December 13–15,
San Diego, pp. 2667–2672.Bemporad, A. (2004), ‘Efficient Conversion of Mixed Logical
Dynamical Systems Into an Equivalent Piecewise Affine
Form’, IEEE Transactions on Automatic Control, 49(5),
832–838.
Benzaouia, A., and Burgat, C. (1988), ‘Regulator Problem
for Linear Discrete-time Systems with Non-symmetrical
0 2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
0
0.5
1
1.5
2
2.5
3
–1 –0.8 –0.6 –0.4 –0.2 0 0.2 0.4 0.6 0.8 1–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
Figure 5. The level set as the union of two ellipsoid sets of invariance and contractivity for the switching discrete-time linearsystem obtained by Theorem 4.6 and the corresponding switching sequences.
International Journal of Systems Science 407
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Constrained Control’, International Journal of Control,
48(6), 2441–2451.Benzaouia, A., and Hmamed, A. (1993), ‘Regulator Problem
for Linear Continuous Systems with Nonsymmetrical
Constrained Control’, IEEE Transactions on Automatic
Control, 38(10), 1556–1560.Benzaouia, A., and Baddou, A. (1999), ‘Piecwise Linear
Constrained Control for Continuous Time Systems’, IEEE
Transactions on Automatic Control, 44(7), 1477–1481.
Benzaouia, A., Baddou, A., and Elfaiz, S. (2002), ‘Piecewise
Linear Constrained Control for Continuous-time Systems:
The Maximal Admissible Domain’, 15th World Congress
IFAC, Barcelona: Elsevier.
Benzaouia, A., Saydy, L., and Akhrif, O. (2004), Stability
and Control Synthesis of Switched Systems Subject to
Actuator Saturation, in American Control Conference,
June 30 to July 2, Boston.Benzaouia, A., Akhrif, O., and Saydy, L. (2006), Stability
and Control Synthesis of Switched Systems Subject to
Actuator Saturation by Output Feedback, in 45th
Conference on Decision and Control, December 13–15,
San Diego.Benzaouia, A., Tadeo, F., and Mesquine, F. (2006), ‘The
Regulator Problem for Linear Systems with Saturations
on the Control and its Increments or Rate: An LMI
Approach’, IEEE Transactions on Circuit and Systems Part
I, 53(12), 2681–2691.Benzaouia, A., DeSantis, E., Caravani, P., and Daraoui, N.
(2007), ‘Constrained Control of Switching Systems: A
Positive Invariance Approach’, International Journal of
Control, 80(9), 1379–1387.Benzaouia, A., and Tadeo, F. (2008), ‘Output Feedback
Stabilisation of Positive Switching Linear Discrete-time
Systems’, in 16th Mediterranean Conference, Ajaccio,
France, June 25–27.
Blanchini, F. (1999), ‘Set Invariance in Control – a Survey’,
Automatica, 35(11), 1747–1768.Blanchini, F., and Savorgnan, C. (2006), Stabilizability of
Switched Linear Systems Does not Imply the Existence of
Convex Lyapunov Functions, in 45th Conference on Decision
and Control, December 13–15, San Diego, pp. 119–124.Boukas, E.L., and Benzaouia, A. (2002), ‘Stability of
Discrete-time Linear Systems with Markovian Jumping
Parameters and Constrained Control’, IEEE Transactions
on Automatic Control, 47(3), 516–520.
Boyd, S.P., El Ghaoui, E.L., Feron, E., and Balakrishnan, V.
(1994), Linear Matrix Inequalities in System and Control
Theory, Philadelphia, PA: SIAM.Branicky, M.S. (1998), ‘Multiple Lyapunov Functions and
Other Analysis Tools for Switched and Hybrid Systems’,
IEEE Automatatic Control, 43, 475–482.Cao, Y.Y., and Lin, Z. (2003), ‘Stability Analysis of Discrete-
time Systems with Actuator Saturation by a Saturation
Dependent Lyapunov Function’, Automatica, 39(7),
1235–1241.
Chadli, M., Maquin, D., and Ragot, J. (2002), ‘An LMI
Formulation for Output stabilisation in Multiple Model
Approach’, in Proccedings of the 41st IEEE Conference on
Decision and Control, Las Vegas, USA.Daafouz, J., and Bernussou, J. (2001), ‘Parameter Dependent
Lyapunov Functions for Discrete-time Systems with Time
Varying Parametric Uncertainties’, Systems and Control
Letters, 43(5), 355–359.
Daafouz, J., Riedinger, P., and Iung, C. (2001), ‘Static
Output Feedback Control for Switched Systems’,
in Procceding of the 40th IEEE Conference on Decision
and Control, Orlando, USA.Daafouz, J., Riedinger, P., and Iung, C. (2002),
‘Stability Analysis and Control Synthesis for Switched
Systems: A Switched Lyapunov Function Approach’,
IEEE Transactions on Automatic Control, 47(11),
1883–11887.El Ghaoui, L., Oustry, F., and AitRami, M. (1997), ‘A Cone
Complementary Linearisation Algorithm for Static output
Feedback and Related Problems’, IEEE Transactions on
Automatic Control, 42(8), 1171–1176.Ferrai-Trecate, G., Cuzzola, F.A., Mignone, D., and Morari,
M. (2001), ‘Analysis and Control with Performanc of
Piecewise Affine and Hybrid Systems’, in Procceding of the
American Control Conference, Arlington, USA.Gilbert, E.G., and Tan, K.T. (1991), ‘Linear Systems
with State and Control Constraints: The Theory
and Application of Maximal Output Admissible sets’,
IEEE Transactions on Automatic Control, 36(11),
1008–1020.Gutman, P., and Hagandar, P. (1985), ‘A New Design of
Constrained Controllers for Linear Systems’, IEEE
Transactions on Automatic Control, AC–30, 22–33.Hu, T., Lin, Z., and Chen, B.M. (2002a), ‘Analysis and
Design forDiscrete-timeLinear Systems Subject toActuator
Saturation’, Systems and Control Letters, 45, 97–112.Hu, T., Lin, Z., and Chen, B.M. (2002b), ‘An Analysis
and Design Method for Linear Systems Subject to
Actuator Saturation and Disturbance’, Automatica, 38,
351–359.
Hu, T., and Lin, Z. (2002), ‘The Equivalence of Several Set
Invariance Conditions Under Saturations’, in Procceding
of the 41st IEEE Conference on Decision and Control,
Las Vegas, USA.Hu, T., Ma, L., and Lin, Z. (2006), On Several Composite
Quadratic Lyapunov Functions for Switched Systems, in
Procceding of the 45th IEEE Conference on Decision and
Control, San Diego, USA, pp. 113–118.
Liberzon, D., and Morse, A.S. (1999), ‘Basic Problems in
Stability and Design of Switched Systems’, IEEE Control
Systems Magazine, 19(5), 59–70.Lygeros, J., Tomlin, C., and Sastry, S. (1999), ‘Controllers
for Reachability Specifications for Hybrid Systems’,
Automatica, 35, 349–370.
Mignone, D., Ferrari-Trecate, G., and Morari, M. (2000),
‘Stability and Stabilisation of Piecwise Affine and Hybrid
Systems: An LMI Approach’, in Procceding of the 39th
IEEE Conference on Decision and Control, Sydney,
Australia.
408 A. Benzaouia et al.
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014

Nguyen, T., and Jabbari, F. (1999), ‘DisturbanceAttenuation for Systems with Input Saturation: An LMI
Approach’, IEEE Transactions on Automatatic Control,44(4), 852–857.
Nguyen, T., and Jabbari, F. (2000), ‘Output FeedbackControllers for Disturbance Attenuation with Actuator
Amplitude and Rate Saturation’, Automatica, 36(9),1339–1346.
Zhu, G., Akhrif, O., and Hentabli, K. (2000),
‘Robustness Augmentation of Fixed Structure FlightControl Systems via ’, in Proceeding of the AIAAConference on Guidance, Navigation and Control, August
14–17, Denver.
Shorten, R.N., and Narendra, K.S. (1998), ‘On the Existenceof a Commun Lyapunov Function for Linear Stable
Switching Systems’, Proceedings of 10th, Yale Workshopon Adaptive and Learning Systems, pp. 130–140.
Shorten, R.N., and Narendra, K.S. (1997), ‘A SufficientCondition for the Existence of a common Lyapunov
Function for Two Second-order liinear Systems’,in Proceedings 36th Conference Decision and Control,pp. 3521–3522.
Tarbouriech, S., Prieur, C., and Gomes da Silva, J.M. (2006),‘Stability Analysis and Stabilization of Systems PresentingNested Saturations’, IEEE Transactions on automatic
Control, 51(8), 1364–1371.
International Journal of Systems Science 409
Dow
nloa
ded
by [
Eas
tern
Mic
higa
n U
nive
rsity
] at
10:
38 2
9 O
ctob
er 2
014