Embed Size (px)
Citation preview

Stability Analysis
Fourth Academic Year
Electrical Engineering Department
College of Engineering
Salahaddin University
January 2016

Stability of a System
Stability is the most important system specification.
If a system is unstable, transient response and steady-state errors are moot
points.
An unstable system cannot be designed for a specific transient response or
steady-state error requirement.
Unstable closed-loop, feedback, systems are useless.
Instability causes damage, break down and/or burn out, to the systems.
Instability malfunctions to the system normal operations.
Dr. Fadhil Aula EED at University of Slahaddin 2 of 33

Types of Stability: According to Natural Response
The total time response of a system is given by
𝒄 𝒕 = 𝒄𝒇𝒐𝒓𝒄𝒆𝒅(𝒕) + 𝒄𝒏𝒂𝒕𝒖𝒓𝒂𝒍(𝒕)
The definition of Stability implies that only the Forced Response remains as the
Natural Response approaches zero.
The types of the stability of a system according to the natural response are
1. Stable System (Asymptotically Stable): a system is STABLE if the natural
response approaches zero as time approaches infinity. Thus, the system should
has, on s-plane, negative real poles and/or complex conjugate: Re{pi}<0 the term
decays exponentially.
2. Unstable System: a system is UNSABLE if the natural response approaches
infinity as time approaches infinity. Unstable system, on s-plane, has positive
real poles or repeated jw axis poles.
3. Marginally Stable: a system is marginally stable if the natural response neither
decay nor grows but remains constant or oscillates. Marginally stable has
simple(not repeated) poles on the jw axis.
Dr. Fadhil Aula EED at University of Slahaddin 3 of 33

Types of Stability: Detecting Stable System
Considering on the natural response definition of the stability:
1. Stable systems have closed-loop transfer functions with poles only in the left half
of the s-plane (LHP)
2. If the closed-loop systems poles are in the right half of the s-plane (RHP), or a
positive real part of complex poles, the system is unstable.
Dr. Fadhil Aula EED at University of Slahaddin 4 of 33

Types of Stability
Dr. Fadhil Aula EED at University of Slahaddin 5 of 33

Types of Stability Cont.
Dr. Fadhil Aula EED at University of Slahaddin 6 of 33

Stability Analysis
Feedback is often used to stabilize a system (closed-loop control system).
In some cases, a sufficient high gain can actually destabilize a system.
Dr. Fadhil Aula EED at University of Slahaddin 7 of 33

Stability Analysis: Examples
Example 6.1: What is the type of stability of each of the following open-loop
systems?
Dr. Fadhil Aula EED at University of Slahaddin 8 of 33

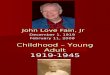
Routh-Hurwitz Criterion
Routh-Hurwitz (Routh, 1905) criterion is used to know how many closed-loop
system poles are in the LHP, in the RHP, and on the jw-axis.
Routh criterion technique gives the number of poles in each section of the s-
plane, but does not give their coordinates.
Re
Im
Unstable RegionRHP
Stable Region
LHP
Marginally Stable Region
Dr. Fadhil Aula EED at University of Slahaddin 9 of 33

Routh-Hurwitz Criterion
This technique requires two steps:
1. Generate a data table called a Routh table, and
2. Interpret the Routh table to tell how many closed-loop system poles are in
the LHP, RHP, and on the jw-axis.
The power of the Routh criterion technique lies in design rather than analysis.
For example, if there is unknown parameters in the denominator of a transfer
function, it is difficult to determine via a calculator the range of this parameter to
yield stability.
Main idea of this technique is the number of roots of the characteristic equation
in the RHP is equal to the number of sign change in the first column of the Routh
table.
Dr. Fadhil Aula EED at University of Slahaddin 10 of 33

Routh-Hurwitz Criterion: Generating a Basic Routh Table
Consider the following closed-loop transfer function
Since in Routh-Hurwitz criterion only system poles are interested, therefore, the
denominator is taken into account.
In order the characteristic equation of the above system does not have roots in RHP,
it is necessary but not sufficient that the following hold:
1. All the coefficient of the polynomial of the characteristic equation have the same
sign.
2. None of the coefficient vanishes.
Dr. Fadhil Aula EED at University of Slahaddin 11 of 33

Routh-Hurwitz Criterion: Generating a Basic Routh Table
First, creating the Routh table:
Dr. Fadhil Aula EED at University of Slahaddin 12 of 33

Routh-Hurwitz Criterion: Generating a Basic Routh Table Cont.
Only first two rows of the array are obtained from
the characteristic equation the remaining are
calculated as follows:
Dr. Fadhil Aula EED at University of Slahaddin 13 of 33

Routh-Hurwitz Criterion: Examples
Example 6.2 Find the stability of the following characteristic equation:
Answer:
Dr. Fadhil Aula EED at University of Slahaddin 14 of 33

Routh-Hurwitz Criterion: Examples
Example 6.3 Find the stability of the following closed-loop system:
Answer:
There are two sign changes in the first column, thus the system is unstable with
two poles in RHP.
Dr. Fadhil Aula EED at University of Slahaddin 15 of 33

Routh-Hurwitz Criterion: Examples
Example 6.4 Find the stability of the following characteristic equation:
𝟐𝒔𝟒+ 𝒔𝟑+ 𝟑𝒔𝟐+ 𝟓𝒔 + 𝟏𝟎 = 𝟎
Answer:
Because the equation has no missing terms and the coefficients are all of the same sign,
it satisfies the necessary conditions.
The Routh table is
The system is unstable because there are two sign changes in the first column, the
equation has roots in the RHP.
Dr. Fadhil Aula EED at University of Slahaddin 16 of 33

Routh-Hurwitz Criterion: Special Cases
There are two special cases may occur:
1. The Routh table may have a zero only in the first column of a row, or
2. The Routh table may have an entire row that consists of zeros.
Dr. Fadhil Aula EED at University of Slahaddin 17 of 33

Routh-Hurwitz Criterion: Special Case: Zero only the First Column
If the first element of a row is zero, a division by zero would be required to form the
next row.
To avoid this phenomenon, an epsilon, , is assigned to replace the zero in the first
column.
The values of is then allowed to approach zero from either the positive or the
negative side, after which the signs of the entries in the first column can be
determined.
Dr. Fadhil Aula EED at University of Slahaddin 18 of 33

Routh-Hurwitz Criterion: Special Case: Zero only the First Column-Example
Example 6.5 Find the stability of the following closed-loop transfer function:
Answer
If is chosen positive, therefore a sign change from the s3 row to the s2 row, and there will be
another sign change from the s2 row to the s1 row. Hence, the system is unstable and has two poles
in RHP.
Alternatively, we could choose negative. There would a sign change from the s4 row to the s3 row.
Another sign change would occur from the s3 row to the s2 row. Our result would be exactly the
same as that for a positive choice for . Thus, the system is unstable, with two poles in the RHP.Dr. Fadhil Aula EED at University of Slahaddin 19 of 33

Routh-Hurwitz Criterion: Special Case: Entire Row is Zero
When the entire row is zero, this indicates that one or more of the following exist:
1. The roots are symmetrical and real,
2. The roots are symmetrical and imaginary, or
3. The roots are quadrantal
Dr. Fadhil Aula EED at University of Slahaddin 20 of 33

Routh-Hurwitz Criterion: Special Case: Entire Row is Zero
To continue with Routh table when a row of zero appears, the following steps are
taken:
1. From the auxiliary equation P(s) = 0 by using the coefficients from the row just
preceding the row of zeros.
2. Take the derivative of the auxiliary equation with respect to s; this gives dP(s)/ds = 0
3. Replace the row of zeros with the coefficients of dP(s)/ds.
4. Continue with Routh table in the usual manner with the newly formed row of the
coefficients replacing the row of zeros.
5. Interpret the change of signs, if any, of the coefficients in the first column of the
Routh table in the usual manner.
Dr. Fadhil Aula EED at University of Slahaddin 21 of 33

Routh-Hurwitz Criterion: Special Case: Entire Row is Zero – Example
Example 6.6
Determine the stability of the following closed-loop transfer function
Answer
Dr. Fadhil Aula EED at University of Slahaddin 22 of 33

Routh-Hurwitz Criterion: Practical Examples
Example 6.7
Find the stability of the following system
Answer
First step is to find the closed-loop transfer function as
Since the system has two RHP poles
and two LHP poles.
Dr. Fadhil Aula EED at University of Slahaddin 23 of 33

Routh-Hurwitz Criterion: Practical Examples
Example 6.8
Find the stability of the following system
Answer
First step is to find the closed-loop transfer function as
There are two sign changes, therefore the
system is unstable with two poles in RHP.
The remaining poles are in the LHP.
Dr. Fadhil Aula EED at University of Slahaddin 24 of 33

Routh-Hurwitz Criterion: Practical Examples
Example 6.9
Find the stability of the following system
Answer
First step is to find the closed-loop transfer function as
The system is unstable!
Dr. Fadhil Aula EED at University of Slahaddin 25 of 33

Routh-Hurwitz Criterion: Practical Examples
Example 6.10
Find the range of fain, K, for the following system, that will cause the system to be
stable, unstable, and marginally stable, assume K> 0.
Answer
First step is to find the closed-loop transfer function as
a) For stable system 0 < K < 1386
b) For unstable system K > 1386
c) For marginally stable system
K = 1386
Dr. Fadhil Aula EED at University of Slahaddin 26 of 33

Routh-Hurwitz Criterion: Practical Examples
Example 6.11
Find the range of fain, K, for the following characteristic equation, that will cause the
system to be stable.
Answer
From s2 row, the condition of stability is K > 0, and from the s1 row, the condition of
stability is
Dr. Fadhil Aula EED at University of Slahaddin 27 of 33

Routh-Hurwitz Criterion: Assignments
HW 6.1
Find the range of K to make the following system stable.
𝒔𝟒 + 𝟓𝒔𝟑 + 𝟓𝒔𝟐 + 𝟒𝒔 + 𝑲 = 𝟎
HW 6.2
Find the range of gain, K, for the following system, that will cause the system to be
stable.
Dr. Fadhil Aula EED at University of Slahaddin 28 of 33

State-Space Stability
Stability of State Space depends on eigenvalues of matrix A.
Because the values of the system’s poles are equal to the eigenvalues of the system
matrix A.
Eigenvalues of matrix A is found by det(λI –A) = 0.
Dr. Fadhil Aula EED at University of Slahaddin 29 of 33

State-Space Stability – Example
Example 6.12
Consider the following state-space model of a control system
Find how many poles are in the LHP, in the RHP, and on the jw-axis.
Answer
Let first form λI-A
Dr. Fadhil Aula EED at University of Slahaddin 30 of 33

State-Space Stability – Example
Example 6.12
Consider the following state-space model of a control system
Find how many poles are in the LHP, in the RHP, and on the jw-axis.
Answer
Second, find the det.(λI –A) :
Since there is only one sign change
in the first column, therefore, the
system has one poles in the RHP
and two poles in the LHP. The
system is, therefore, unstable.
Dr. Fadhil Aula EED at University of Slahaddin 31 of 33

State-Space Stability –Assignments
HW 6.3
The following system in state space represents the forward path of a unity feedback
system. Use the Routh Hurwitz criterion to determine if the closed-loop system is stable.
𝒙 =𝟎 𝟏 𝟎𝟎 𝟏 𝟑−𝟑 −𝟒 −𝟓
𝒙 +𝟎𝟎𝟏𝒖
𝒚 = 𝟎 𝟏 𝟏 𝒙
Dr. Fadhil Aula EED at University of Slahaddin 32 of 33

End of Chapter Six!
Dr. Fadhil Aula EED at University of Slahaddin 33 of 33