Embed Size (px)
Citation preview

Eur. J. Mech. A/Solids 18 (I 999) 253-269 0 Elsevier. Paris
Stability of viscoelastic beams with variable cross-section
Giuseppe Fadda
Laboratoire de ModtGsation en Mkanique, CNRS-URA 229, Universite’ Pierre et Marie Curie (Paris VI). 4, place Jussieu, 75252 Paris, France
(Received 10 February 1998; revised and accepted 16 July 1998)
Abstract - A theoretical model for viscoelastic beams with variable section is derived using the principle of virtual work; a linearization is then obtained and stationary solutions are numerically studied. This allows a brief study of their stability and an interpretation in terms of damping. In particular an interesting feature of the limit speed is shown, 0 Elsevier, Paris
turbines / Timoshenko model for beams I Kelvin-Voigt body I stability of stationary solutions
1. Foreword
Turbines are today in every corner of our industrial age, from power plants to engines of aircrafts. The study of their stability is of great importance, and particularly in relation with their angular speeds; as a rule of thumb, the more speed they have, the more power they deliver.
Speed is not the only important parameter; others are external damping, due to the friction effect of the driving fluid (for instance, steam in a steam turbine), and viscoelastic behaviour of the shaft.
Recent works (Roseau, 1995; Fadda, 1996a,b; 1997) have been undertaken using a very simple model: a beam with constant cross-section and rigid discs as wheels. While some of its features were interesting, this model suffered several drawbacks; hence the idea of the model described in this paper.
A natural idea, in order to model a turbine, is to consider the following body of revolution (in cylindrical coordinates)
A = { (T, 2) /U(Z) 5 T 5 b(z) and 0 5 z 5 L} (1)
where <J(X) is the internal radius and b(z) the external radius, both functions of the longitudinal coordinate Z, and L the length of the shaft. The turbine is then supposed to be made of a homogeneous, isotropic and viscoelastic material. We shall use, as the constitutive law for this material, the Kelvin-Voigt body, because it is the simplest one and conforms to the principles of thermodynamics of irreversible processes (DeGroot and Mazur, 1962; Haase, 1990).
The assumptions regarding the geometric shape of the turbine force us, however, to take into account shear effects: as a matter of fact, the external radius b(z) is no longer negligible compared to the length; so it can be no longer assumed that cross-sections remain orthogonal to the neutral axis. This will be accounted for using the Timoshenko model for beams.

254 G. Fadda
We shall use the following notations: the neutral axis ,C at rest; any cross-section S, with longitudinal coordinate z at rest; the point C, intersection of S and C; a primed quantity will refer to that quantity after deformation. For example, C’ stands for the intersection between the neutral axis L’ and the cross-section S’. corresponding respectively to L and S after deformation; the Lam& coefficients X and b; the Poisson ratio //; Young’s modulus E; it is well known that
VE x = (1 - 2zI)(1+ 11)’
E 211 = ~
1 + 11 (2)
We shall use a characteristic time tO, called the relaxation time of strain at constant stress (hence the a). It is the only parameter of the Kelvin-Voigt constitutive law. We shall admit a very large range of lo-’ to lo-‘{ s.
All calculations will be done in an orthogonal basis (0, z, y, z) attached to the rotating shaft; e’; represents the unit vector of the i-axis.
2. Equations of motion
2.1. Kinematics
As cross-sections are not orthogonal to the neutral axis (see figure I), the angle in the Ozz plane between the
Oz axis and the vector normal to any cross-section S’ at point C’ is not given by the derivative % (according to the hypothesis of small strains); let us note it by Q.l, (& in the Oyz plane) (Dym and Shamesf3973: Fadda, 1997). According to Jigure I, we have, for a point M’ such as C’ It@ = XC, --
C’H’ = -C’ &? . ?‘,. tan p$., III --z tan 7/j., M --.x ?/I,,
(3)
and the same in the Oyz plane. Let us now consider a point M of a cross-section S. After deformation, M moves to M’, and C to C’: the vector u’ = Cc is therefore the displacement field of the neutral axis. Adding a longitudinal initial strain &a, we obtain
(4)
Boundary conditions will be: no displacement of the neutral axis; no flexion at both extremities, that is
C u,,, = uy = u; = 0
$J.r = ?l+, = 0 (5)
at x = 0 and z = L. The strain tensor e is then calculated using the metric tensors of the natural undeformed and the deformed states.
Each cross-section is further assumed to be a rigid body (this assumption is common to most unidimensional models). Therefore
v’t, f.r.r = Eyy = tsy - -0 (6)

Stability of viscoelastic beams with variable cross-section
Figure 1. Kinematics.
255
This is equivalent to taking a Poisson ratio v equal to zero. Furthermore, using the constitutive law of the Kelvin-Voigt body [see, for instance, Fadda (1997); Germain (1973)]
tr indicating the trace operator, Sij the Kronecker symbol
Sij = {
1, ifi=j 0, ifi#j
(7)
(8) and & the Piola-Kirchhoff stress tensor, we obtain
A ,. fl.,..r = gy,y - - 0 because X = 0 and e,rx = eyy = 0 Vt P-4
i?.ry = 0 because t,ry = 0 Vt (9-b)
Moreover, the other components of the Piola-Kirchhoff stress tensor are
(9-c 1

256 G. Fadda
where k: is the Timoshenko parameter. According to Dym and Shames (1973; p. 190), it can be expressed, for a circular hollow cross-section, as
6(1 + V)(l + 7)?# h; = (7 + 6v)(l + ~1)~ + (20 + 12v)rn’ w’th m = %
v being the real value of the Poisson ratio. Obviously, as m depends on z, so does 6. Finally, using the strain gradient matrix
we are able to compute the Piola-Lagrange stress ‘tensor’
CT;, = F;kG’x.,,
It is well known that (T is not symmetric.
(10)
(11)
(12)
2.2. External forces
We shall completely drop body forces, and introduce only two types of contact forces, depending obviously on z:
- an external damping force F,I, assumed to be proportional but opposite to the velocity of point C’. Denoting o (unit: Pa.s) the coefficient of proportionality, we shall assume in addition that it is positive, constant and uniform;
- the effect 2, of the viscoelastic suspension shown in jgure 2. The suspension is supposed to act as a continuous density of surface forces, with a density per unit length of the shaft
-x . (transverse displacement of C’ ) - L-l . (transverse velocity of C’ ) ( 13)
x being the stiffness (unit: Pa) and p the damping coefficient (unit: Pa.s) per unit length of suspension. Please note that this force does not involve longitudinal motion, but only transverse motion.
Figure 2. Viscoelastic suspension.

Stability of viscoelastic beams with variable cross-section 257
2.3. Principle of virtual work
Starting from the well-known equations of motion
/I being the density of mass per unit volume, ZJI,/~ the acceleration of point AI’ relative to the Earth, considered to be a Galilean system of reference, J the density of body forces per unit volume, and div the divergence operator, it is easy, performing the scalar product with a virtual displacement field u” verifying boundary conditions (5) and integrating by parts the last term, to obtain the principle of virtual work
(15)
where F’ = CJ . G is the density of contact forces per unit area of the frontier &4 of the shaft (n’ being the unit outward normal to ifId).
Let us consider the following virtual displacement 2
the basis (uz., I$, ~2, li/,T.! 1”;) of the virtual space containing ?z* depending on z and verifying the boundary conditions (5).
We introduce next the eccentricity vector { = (77, where G is the centre of mass of S. It can be shown that
Ii = c G = r1.r 5, + q!J c,J --
= C’ G’ + O(ifX) (17)
(remember that a primed quantity refers to that quantity after deformation). We shall consider the products with { negligible in the following. Assuming a constant angular speed
w’A,R = ‘de’,
we easily find the acceleration of point M’
With the definitions of the area A and the geometric moment of inertia 1 (depending on z)
I = I.,.,. = I,, = s
(x - r# da = (y - p/)” dn s J S
(18)
(19)
(20)

258 G. Fadda
and adding (as it is considered negligible)
(21)
to the z-component of the acceleration, we obtain the desired virtual work
(22)
after integration by parts and exploitation of the boundary conditions. The computation of the virtual work of external forces is straightforward; on the contrary, the last computation
is somewhat tedious. Neglecting the eccentricity, we have
(23-a)
and
(23-b)
The second line is derived from the first using the definition (2) of the Piola-Lagrange stress ‘tensor’. We now regroup factors into:
- the terms of degree zero in x or y (factors of A in fine)

Stability of viscoelastic beams with variable cross-section 259
with
- the terms of degree two in II: (in factor of I)
with
- the terms of degree two in y (in factor of I)
with
(24-b)
(24-c)
(24-d)
(24-e)
(24-f)
We shall now only retain the quadratic terms in the last two expressions, because only cubic terms appear in the factors of A, and, in the case of a circular cross-section
I = O(A”) (25)

260 G. Fadda
Finally, it remains only
2.4. Equations of motion
Regrouping all terms appearing in the principle of virtual work, Eq. (15), we are led to the scalar equation
As (uf, UT/; UT, T,!I:, , $,1;) forms a basis of the virtual displacement space defined before, the only way to solve this equation is simply by setting each E;, for i = 1 to 5, equal to zero. These are the equations of motion
b+ + &) 2, _ (a + ,‘j) ($ (2s-a) ,,,) -x’u,,,

with
Stability of viscoelastic beams with variable cross-section 261
a2u- pA+ = -~%+$A(q+t,$)]
- ~~[,,,(,:,(,,.,,~)+~,(~~,.1,~))]
+~[EI(;((~)2+(~)2) +pp+w%))]
PI-- a;? = F(& +t2$) + &[EI(,:, +t2g)]
pI$ = q+,.tq +g[E+,+tg)]
(28-c)
(28-d)
(28-e)
(28-f)
2.5. Linearization about the natural state
The nonlinear equations above are indeed complex and difficult to study, even numerically (Fadda. 1997; ch. 5). To simplify matters, let us proceed to a linearization about the natural undeformed state. The rest of the paper will deal with this important subcase.
The linearization leads to the following system of linear partial differential equations
i3”U, PA dt” ( ’ + 2w% - w2(uv + q,)
(29-a)
2 - %))I --(a+/?)($$ +wu,,)-~~~~~ (29-b)
&l, -%- (29-c)

262 G. Fadda
I (29-d)
(29-e)
The longitudinal motion is now no longer coupled with the transverse motion. If we consider the case of a nonrotating, perfectly elastic shaft (that is, w = 0 and t, = 0), the transverse
motion is governed by the two following independent systems of partial differential equations
(30)
w being the transverse displacement (u,, or u,), and Q the external loading. These equations are exactly those given by Dym and Shames (1973; Eqs 7-54, p. 372).
2.6. Stationary longitudinal motion and stability
We shall prove the following result concerning Eq. (29-c).
Property I: The stationary longitudinal motion is asymptotically stable in absence of external damping.
2.6.1. Stationary solutions
Such solutions must verify the following differential equation
&[EA(g+eo)] =o
equivalent to
(31-a)
(31-b)
C being a constant of integration. Integrating the last equation between 0 and z on the one hand, between 0 and L on the other hand, we obtain
(32-a) u,(z) - u,(O) = u;(z) = c “- & - &OX s U,(L) -U;(O) = 0 = c J’ L dz
- - EOL 0 EA

Stability of viscoelastic beams with variable cross-section 263
according to boundary conditions (5), thus giving the desired stationary solution
t&z) = E() L (32-c)
The solution is equal to zero in two important cases: no initial longitudinal strain (~0 = 0); a constant cross-sectional area (if E is constant along the shaft).
2.6.2. Proof
a) To prove Property I is equivalent to prove that the small deviation d( Z. f). defined as
d(z, t) = u:(.z, t) - &x5 t)
of the solution u_(z, t) of the longitudinal motion is always bounded and converges to zero as time approaches infinity. d(z. 1’) verifies the following equation
(33-a)
with the boundary conditions
d(O) = d(L) = 0 (33-b)
Let us assume that d(x: t) can be written by means of a generalized Fourier series
d(z. t) = c d,,(x, t) /I=1
(34)
and each d, (z, t) is assumed: i) to verify Eqs (33); ii) to be of the form D,, (x)0,, (t). We are then led to
PAD,,@, = [EAD;,]‘(O,, + t&J - oD,,O:~ (35)
’ indicating the derivative with respect to the argument. It is now difficult to separate properly what depends on z and what depends on t, because pA depends on Z.
But the separation is straightforward in two cases: i) there is no external damping (n = 0); ii) the density of mass and the cross-section are constant along the shaft.
While this case is interesting to study the properties of a numerical scheme (as an analytical solution is easy to compute), it has nothing to do with a turbine!
Thus, let us take a = 0. Equations (33) are therefore equivalent to the following infinite system of differential equations indexed by n
[EAD;,]’ + X,,pAD,, = (1 D,,(O) = I&(L) = 0
(36-a)
(36-b)
where A,, is the real constant of separation,

264 G. Fadda
b) X,, is necessarily strictly positive. Equation (36-a) is a peculiar case of the Sturm-Liouville eigenvalue problem
(X-c)
with (a. b) E R”, Z, G EA > 0, r’ E pA > 0 and Q = 0 5 0. Therefore, the problem (11) is a self-adjoint.
positive definite eigenvalue problem. As such, according to the following theorem:
Theorem 1: If the eigenvalue problem
M(y) - AN(y) = 0: ;I/ : [n, b] + R (37)
is self-adjoint and positive definite, then a countable set of positive mutually different eigenvalues of this problem exists.
With, in our case (Rektorys, 1969, theorem 4, p. 807)
it is clear that X,, must be positive. Were it equal to zero that Eq. (36-a) should be written
[EAD;,]’ = 0 (39)
We have seen before that such an equation admits the only solution D,, = 0 (under the ‘no initial longitudinal strain’ case), and d, (z, t) =: 0 too: we shall thus only need those strictly positive eigenvalues X,,.
c) Equation (36-b) admits the obvious solution
8,, = A,,&+’ + B,,e”-
AA,, and f3,, being two constants of integration (completely determined by the initial conditions), and
r* = ;(-A,,,,* &cjGq
Obviously, the real parts of r* are always strictly negative, because X,, is strictly positive. Thus
vn . lim O,, (i’) = 0 t-++x
(40-a)
(40-b)
(41)
d) It remains only to prove that c d,, (x, t) converges uniformly and absolutely towards cl(z, f) in the [O, L]
interval. First, let us quote two theorems.
Theorem 2: If the eigenvalue problem (37) is self-adjoint, then the eigenfunctions IV;(Z), Iq,j(z) corresponding to different eigenvalues Xi, X,; are orthogonal in a generalized sense, i.e.
4
/ y; N(yj) dz = 0 for X; f X, (42)
. c,

Stability of viscoelastic beams with variable cross-section 265
Theorem 3: Let us consider a self-adjoint positive definite eigenvalue problem (37). Let a system of orthogonal eigenfunctions 4;(x) be normalized in a generalized sense, i.e. let
Let ?L(J) be a comparison function and let the numbers
be its generalized Fourier coefficients. Then the series
converges absolutely and uniformly in [n, 61.
(43-a)
(43-b)
(43-c)
(Rektorys, 1969, theorems 2 and 8, pp. 807, 810); a comparison function is a sufficiently regular function, say @([a, 61) . m our case, and verifies the boundary conditions of the eigenvalue problem [see Rektorys (1969), definition 5, p. 804 for further details].
The conditions of the theorems are clearly fulfilled. In our case, the eigenfunctions are the D,, (z); they always can be taken orthonormal. Taking for the function u the function d itself, we are led to
d(z, t) N(D/,.(z)) dz
L D,j N( Dk) dz
(44)
so, c D,,(z)@,(t) is uniformly and absolutely convergent. Therefore the function d(z, t), as we have )I
written it, exists for all (z, t) E [0, L] x Rf and is bounded and converges towards zero as 1; approaches infinity, because every d,, (z, t) does.
2.6.3. Some consequences
We are now interested in the general case (a # 0). It does not seem plausible to claim that the presence of external damping should change anything. The external damping acts indeed always as an attenuating factor for the strain.
To sustain this, a great number of numerical calculations have been made; they all showed that the longitudinal motion is stable. As a consequence, only the transverse motion of the turbine may become unstable.

266 G. Fadda
3. Stationary transverse motion and stability
3.1. Introduction
The transverse motion described by Eqs (29) is complex and unsolvable in the general case, as functions like A and 1 depend on z. We must therefore resort to numerical calculations, not only to solve the governing equations aforementioned, but also in order to find stationary solutions and their stability.
A general method to study stability is the following: given a set of parameters (for instance the angular speed, the relaxation time, the external damping parameter), we have to integrate the equations of motion and observe the solution after a sufficiently ‘long’ time (depending obviously on the parameters). To tell if the motion is stable or not should be straightforward. Such a method is then used repeatedly in the parameter space, according to the following algorithm:
Fix every parameter; choose a step 2Aw; set w = 0
Do
Integrate equations of motion for a speed w + 2Aw
If the motion is stable, then set w = w + 2Aw; continue
Else exit
Loop
Limit speed = (w + Au) f Aw
Obviously, this scheme works because there is only one stationary solution for each set of parameters, and, beyond the limit speed, the motion is definitely unstable.
In order to solve the partial differential equations of motion, we have chosen the finite-difference method, with a scheme closely related to the Crank-Nicholson scheme used for dissipative parabolic equations (Fadda, 1997; pp. 109-l 10). The ideas were mainly: i) to ensure stability of the numerical scheme for any (at least reasonable) space and time steps; ii) to avoid numerical dissipation. The last point is of uttermost importance to study stability.
Sadly, it is impossible to tell in the general case if the retained scheme is a) stable; b) nondissipative. However, comparisons between numerical and analytical results (in the rare cases where they are known) show promising behaviour. We have also compared with success numerical solutions calculated after direct integration of the equations of motion and stationary solutions, as these can be obtained by solving differential equations by shooting or relaxation methods (Press et al., 1994, ch. 17).
3.2. Some numerical results
We have used for our numerical calculations a model of a real gas turbine. It is a four-wheeled machine, with a functional speed about 6 000 rad.s-’ (that is 950 rev.s-r or 57 000 rev.min-r ). The first critical speed is around 3 200 rad.s-‘.
3.2.1. Stationary motion
The stationary motion exhibits a full spectre of critical speeds, that is speeds for which the amplitude of the strain becomes relatively large. We are particularly interested in the first two, as they are relatively low.

Stability of viscoelastic beams with variable cross-section 267
Table I shows the influence of the external damping parameter on the stationary solution.
Table I. Influence of the external damping parameter.
0 (Pa3)
0 5 50 100 250 500 5000
First critical speed (rad.s-’ )
3171fl 3171fl 3171 f 1 3171* 1 3171fl 3171 f 1 3174f 1
147”~ (m) Second critical speed (rads-’ ) ,u;‘~~ (m)
-1.9 X 10-a 7887f 1 -4 x10-l -1.9 x lo-:’ 7887f 1 -4 x lo--’ -1.8 x IO-" 7887f 1 -1.8 x lo-.’ -9.7 x lo-’ 7887f 1 -9.1 x 10-s 4 x lo-’ 7887f 1 -3.7 x 10-l -2 x lo-” 7887f 1 -1.8 x lo-” -2 x lo-" 7934 i 1 -2 x lo-”
Our model predicts correctly the first critical speed and shows in addition that the external damping, as it becomes stronger, attenuates the transverse displacement.
The coefficient of viscosity of the suspension ,0 plays the same mathematical role than the external damping parameter in the equations of motion. It has therefore the same influence regarding strain.
The stiffness x has a real influence only beyond a high threshold. Table ZZ shows it for Q = 500 rad.s-r. Not only the critical speeds are higher, but so are equally the amplitudes of deformation.
Table II. Influence of stiffness
x (Pa) First critical speed (rad.s- ’ ) 7~;“~ (m) Second critical speed (rads-’ ) uTax (m)
0 3171 f 1 -2 x10-1 7887f 1 -1.8 x IO-’ 10; 3245f 1 -2 x lo-” 7930f 1 -2.1 x lo-.;
5x lo7 3518f 1 -2.3 x lo-” 8099 f 1 -3.3 x lo-’ IOX 3821 f I -2.5 x lo-” 8308f 1 -4.6 x lo-
5x IoN 5460f 1 -4.3 x lo-" 9842f 1 -1.5 x lo-’ 10:’ 6729f I -6.1 x 10-I 11422f 1 -2.5 x 10-I
3.2.2. Stability in the absence of suspension
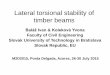
In the parameter space (t, , w , a), Jigure 3 shows the maximal angular speed beyond which stationary solutions are no longer stable, and this for Q equal to 50, 500 and 5 000 Pa.s respectively (from left to right).
We can see three parts in .the curves: 1) the elastic limit (corresponding to t, -+ 0) shows a very high limit speed (8 700 f 100 rad.s-I). It is
neither due to longitudinal motion nor to the second critical speed. It is perhaps caused by shearing effects; 2) the viscous limit (t, -+ +oo) gives a value of 3 150 f 50 rad.s-*, corresponding to the first critical speed.
This is the classical observation since the late nineteenth century (Lord Rayleigh, 1896, ch. VII, VIII); 3) between these two parts a maximum (around 9 550 f 50 rad.s-‘) appears, which value does not depend
on the external damping parameter, but which position along the to-axis does. This suggests the following interpretation: the internal damping (due to the viscoelasticity) assists the external damping to reduce the strain, but only up to a certain limit, clearly depending itself on the value of the external damping parameter. Beyond this, the limit speed falls swiftly, showing the opposite behaviour. A similar reasoning was shown (Bolotin, 1963; pp. 139-154) for a model with one degree of freedom.

268 G. Fadda
Figure 3. Angular speed and stability.
3.2.3. Influence of stij%ess
As before, the influence is noteworthy for strong values only. According to what was said before, we should find: i) higher limit speeds for the elastic and the viscous limits; ii) higher maxima, since the elastic limit is higher.
Table III, established for a = 5 000 Pa.s, confirms plainly these forethoughts.
Table III. Influence of stiffness on stability.
x (Pa) Limit speed (rad.s- ’ )
to - x Maximum
Critical speed (rad,s-’ )
t, * 0 I 2
0 3 I.50150 955oZt50 8700f 100 3 171* 1 7887f I IO7 3250f50 965O~tSO 8900f 100 3 245 It I 7930f I lo* 3850&50 11300f100 9900* 100 3821 f I 8308i I IO!’ 6750650 155ooZ!c 100 11900f100 6729~t I 11422&l
4. Conclusion
The limit speed of stability of the transverse linear motion is shown to depend strongly on the ratio between the internal damping parameter t, (related to the constitutive law of the material) and the external damping coefficient CL The nonlinear model exhibits the same kind of behaviour (with slight quantitative differences).
The stability problem is, as a matter of fact, more significantly affected by fluid film bearing or noncircular section of the shaft; see Roseau (1987) and references therein for an introduction, and technical reports of the European ROSTADYN project (BRITE-EURAM 5463) for up-to-date bibliography and papers on this subject.
References
Bolotin V.V., 1963. Nonconservative Problems of the Theory of Elastic Stability. Pergamon Press, Oxford. DeGroot S.R., Mazur P., 1962, Non-equilibrium Thermodynamics, Dover Publ.. New York. Dym C.L., Shames I.H., 1973. Solid Mechanics. A Variational Approach, McGraw-Hill. New York.

Stability of viscoelastic beams with variable cross-section 269
Fadda G., 1996a, The effect of internal damping on the stability of a rotating shaft fitted with several discs: a numerical investigation, Tech. Rep. ROS 1-7, BRITE-EURAM 5463.
Fadda G., 1996b, The effect of internal damping on the stability of a rotating shaft fitted with discs: second-order Fourier expansion and Hopf bifurcation in first- and second-order models, Tech. Rep. ROS I-12, BRITE-EURAM 5463.
Fadda G., 1997, Aspects theoriques et numeriques des effets de I’amortissement inteme du matetiau sur la stabilite de rotation de I’arbre d’une machine portant un ou plusieurs disques, PhD thesis, Univ. Pierre et Marie Curie, Paris.
Germain P., 1973. Cours de mtcanique des milieux continus, Masson, Paris. Haase R.. 1990, Thermodynamics of Irreversible Processes, Dover Publ., New York, 2nd edn. Strutt J.W., 3rd Baron Rayleigh, 1896, Theory of Sound, Dover Publ.. New York, 2nd edn. Press W.H., Teukolsky S.A., Vettering W.T., Flannery B.P., 1994, Numerical Recipes in C - The Art of Scientific Computing, Cambridge
Univ. Press, Cambridge, 2nd edn. Rektorys K., 1969. Survey of Applicable Mathematics, Iliffe Books, London. Roseau M., 1987. Vibrations of Mechanical Systems: Analytical Methods and Applications, Springer Verlag, Berlin. Roseau M., 1995, Non linear resonance of a rotating shaft with internal damping and fitted with several discs, Tech. Rep. ROS l-6.
BRITE-EURAM 5463.