Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSINGInt. J. Adapt. Control Signal Process. 2014; 28:553–561Published online 9 May 2013 in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/acs.2408
State estimation for short-time switched linear systems underasynchronous switching
Weiming Xiang 1,2,*,†, Jian Xiao 2 and Muhammad Naveed Iqbal 2
1School of Transportation and Logistics, Southwest Jiaotong University, Chengdu, 610031, China2School of Electrical Engineering, Southwest Jiaotong University, Chengdu, 610031, China
SUMMARY
In this note, the state estimation problem for a class of short-time switched linear systems is investigated.By incorporating the concept of finite-time stability, an observer is designed to ensure the error dynamicsfinite-time stable in the short-time switching interval under the general asynchronous switching whereas syn-chronous switching mode is its special case. A numerical example is provided to illustrate the effectivenessof our study in this paper. Copyright © 2013 John Wiley & Sons, Ltd.
Received 27 October 2011; Revised 29 January 2013; Accepted 4 April 2013
KEY WORDS: short-time switched systems; state estimation; finite-time stability; asynchronous switching
1. INTRODUCTION
The issue of state estimation has been investigated intensively in both continuous and discretedomains. After Luenberger proposed a method to design an observer for linear time-invariant sys-tems in 1960s [1], numerous results on Luenberger-like observer design were presented. Thereare some results about an observer design for switched systems, and most of them are aboutswitched linear systems and focus on asymptotic observer defined on an infinite time interval [2–8].However, in some practical situations, switching strategies are often designed that switching fre-quently occurs in some certain short-time intervals of interest such as failures and repairs of machinein manufacturing systems, which can be illustrated in Figure 1.
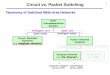
Under this class of switching, the asymptotic stability property is absolutely determined by eachsubsystem, and the boundedness of system state is also of great importance; for example, the statemay reach unacceptable large values due to frequent switching in the short-time interval [9]. Hence,here, we design two types of observers. One class is the asymptotic observer that can be designedindependently for each subsystem. Moreover, another important system property that we are inter-ested in is the boundedness of the error state during the short-time interval, and the second one is theboundedness observer ensuring error state bounded in a prescribed boundary. The generic schemeof the augmented observer is illustrated in Figure 2.
On the other hand, the necessities of considering asynchronous switching have been shown forefficient controller design for practical systems [10, 11], and a few results are available to date forasynchronous switching [12–15]. By introducing the concept of finite-time stability [16–18], themain contribution in this paper is to design boundedness observer for short-time switched systemunder asynchronous switching, whereas the synchronous switching is just a particular case.
*Correspondence to: Weiming Xiang, School of Transportation and Logistics, Southwest Jiaotong University, No.111,Erhuanlu Beiyiduan, Chengdu, 610031, China.
†E-mail: [email protected]
Copyright © 2013 John Wiley & Sons, Ltd.

554 W. XIANG, J. XIAO AND M. N. IQBAL
short time interval short time interval
t
i
Figure 1. An illustrative diagram for switching that only occurs in short intervals.
Switched system
State x
Activated subsystem index i
Output y
Asymptotic observerEstimated state 1̂x
Boundness observerEstimated state 2x̂
Input u
1
2
ˆ No switching occursˆ
ˆ In short-time switching intervalx
x
Estimated state x̂x
Figure 2. Generic scheme of augmented observer for short-time switched system.
2. PRELIMINARIES AND PROBLEM FORMULATION
In this note, the switched discrete-time system † is given as follows:
† W x.kC 1/D A�.k/x.k/CB�.k/u.k/ (1a)
y.k/D C�.k/x.k/CD�.k/u.k/ (1b)
where x.k/ 2Rn is the state with x0 as its initial state, u.k/ 2Rm is the input, and y.k/ 2Rp is themeasured output. �.k/ W ZC ! I WD f1, 2, : : : ,N g is the switching signal, which takes a value inindex set I. N > 0 is the number of subsystems. Ai , Bi , Ci , and Di are constant matrices withappropriate dimensions. The time-interval sequence denoted by NS WD
˚�s1,� l1, : : : ,�sn,� ln, : : :
�,
where �sn WD Œkn0 , kn0 C Tn/ represents the short-time interval in which switching occurs, and� ln WD
�Qkn0 , Qkn0 C QTn
�denotes the relatively long interval in which the system maintains in a fixed
mode. It is assumed that kn0 C Tn D Qkn0 , Qkn0 C QTn D knC10 . There exists an upper bound of Tn as T �such that QTn >> T �. In �sn, the switching sequence is defined as Sn WD
˚kn0 , kn1 , : : : , knm, : : : , knM
�where kn0 , knm, and knM denote the initial instant,mth switching instant, and last instant, respectively.Explicitly, the length of interval �sn can be figured out as Tn D knM � kn0 .
In this note, the Luenberger-type observer †o is in the following form:
†o W Ox.kC 1/D A O�.k/ Ox.k/CB O�.k/u.k/CL O�.k/.y.k/�C O�.k/ Ox.k/�D O�.k/u.k// (2)
where Ox 2 Rn is the estimated state, and O�.k/ W ZC! I is the observer switching signal. MatricesLi 2 Rn�q are observer gains to be designed. When O� coincides � exactly, that is, O�.k/ D �.k/,8k 2 ZC, we say that the switching is synchronous between the observer and the system; otherwisethe switching is asynchronous. The corresponding switching sequence of the observer with respect
to �sn is denoted by OSn WDnOkn0 , Okn1 , : : : , Oknm, : : : , OknM
o.
Letting e.k/D x.k/� Ox.k/, error dynamics †e can be stated as
†e W e.kC 1/D .A O�.k/ �L O�.k/C O�.k//e.k/C .A�.k/ �A O�.k/CL O�.k/C O�.k/ �L O�.k/C�.k//x.k/
C .B�.k/ �B O�.k/ �L O�.k/D�.k/CL O�.k/D O�.k//u.k/(3)
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

STATE ESTIMATION FOR SHORT-TIME SWITCHED LINEAR SYSTEMS 555
If O�.k/ D �.k/, 8k 2 ZC, then one can obtain the error dynamics under synchronousswitching as
e.kC 1/D .A�.k/ �L�.k/C�.k//e.k/ (4)
As well known, frequent switching may lead to large transients [9], so the concept of finite-timestability concerning boundedness of x.k/ is introduced.
Definition 1 ([9, 16])System (1) is said to be finite-time stable with respect to .ı, ",R,M/, where 06 ı < " andM 2 ZC,if xTRx < "2, 8k 2 f1, 2, : : : ,M g whenever xT0 Rx0 < ı
2.If the error state boundedness in �sn WD
�kn0 , knM
�is considered, we can state the following
problem.
Problem 1Given switched system (1) and observer (2), find observer gains Li ensuring the finite-time stabilityof error dynamics (3) with respect to .ı, ",R, Tn/ in �sn.
In practice, the input u is always bounded. Moreover, because state x converges to equilibrium inrelatively long time interval, the state at the initial instant of short-time interval (the same instant atthe end of previous relatively long time interval) is also bounded. Thus, the following assumptionis proposed.
Assumption 1It is assumed that any admissible input u satisfies kuk 6 � , and system state x satisfies
��x �kn0 ��� 6�.
3. MAIN RESULTS
Generally, the switching sequence Sn WD˚kn0 , kn1 , : : : , knm, : : : , knM
�and OSn WD
nOkn0 , Okn1 , : : : , Oknm, : : : ,
OknM
ocannot coincide exactly. Without loss of generality, the observer switching is supposed to lag
behind the switching of physical system. Let �nm D Oknm � k
nm > 0, whereas �nm 6 knmC1 � knm. It
means that observer †o identifies the correct mode during a certain period �nm such as in Figure 3.From Figure 3, we can see each interval
�knm, knmC1
�can be classified into two segments. For the
interval�knm, knmC�
nm
�, the system is working in mode M1 with �.k/¤ O�.k/; during the interval�
knmC�nm, knmC1
�, the system is viewed as working in mode M2 with �.k/ D O�.k/. At instant
knm C�nm, the system switches from M1 to M2, so the switching sequence of overall system can
be expressed as QSn WD˚kn0 , kn0 C�
n0 , kn1 , kn1 C�
n1 , : : : , knm, knmC�
nm, : : : , knM , knM C�
nM
�.
Mode M1: During interval�knm, knmC�
nm
�, we assume �.k/ D j , O�.k/ D i . Augmenting the
error dynamics (3) and system model (1), the mode M1 is governed by
�.kC 1/D AM1
i �.k/CBM1
i u.k/ (5)
Figure 3. An illustrative diagram for asynchronous switching. denotes M1 and stands for M2.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

556 W. XIANG, J. XIAO AND M. N. IQBAL
where
�.k/D�eT .k/ xT .k/
�T,AM1
i D
�Ai �LiCi Aj �Ai CLiCi �LiCj
0 Aj
, and
BM1
i D
�Bj �Bi �LiDj CLiD
Bj
Mode M2: It is assumed that �.k/ D O�.k/ D i and k 2�knmC�
nm, knmC1
�, because only error
state e.k/ is the point of concern, and the error dynamics is governed by
e.kC 1/D AM2
i e.k/ (6)
where AM2
i D Ai �LiCi .Then, the following necessary definitions are required for our main results.
Definition 2For each short-time interval �sn, the average dwell time �nave is defined by �nave D
�knM � k
n0
�=M D
Tn=M . The minimal dwell time �nmin and the maximal dwell time �nmax are defined by �nmin D
infmD1,2,:::,M˚knm � k
nm�1
�and �nmax D supmD1,2,:::,M
˚knm � k
nm�1
�, respectively.
Now, we are in the position to present the following results.
Theorem 1Consider switched system (1) and Assumption 1 holds. If there exist a set of matrices Pi , Qi , andXi and scalars 1 > 0, 2 > 0, > 0, and � > 1 such that
1
�R 0
� R
<
�Pi 0
� Qi
< 2
�R 0
� R
(7)
��Pi PiAi �XiCi� ��Pi
< 0 (8)
266666664
��Pi 0 0 ATi Pi �CTi X
Ti 0
� ��Qi 0 ATj Pi �ATi Pi CC
Ti X
Ti �C
Tj X
Ti ATj Qi
� � �I BTj Pi �BTi Pi CD
Ti X
Ti �D
Tj X
Ti BTj Qi
� � � �Pi 0
� � � � �Qi
377777775< 0 (9)
.2=1/Tn=�nave�Tn2.ı
2C�2/C �2�.1C ˇ/� 1"2 < 0 (10)
where ˛ D ln.2=1/=�nmin C ln � , ˇ D e˛�nmax.1� e˛M�
nmax/=.1� e˛�
nmax/, � D
.1� ��nmax/=.1� �/ � > 1
�nmax � D 1, and �nmax D supmD0,1,2,:::M f�
nmg, then error dynamics (3) with
Li D P�1i Xi is finite-time stable with respect to .ı, ",R, Tn/.
ProofIn mode M1, we choose VM1
i .�/D �TPi� and Pi D diag.Pi ,Qi / for i th subsystem dynamics.Substituting Li D P�1i Xi and from (9), the following result can be easily derived
VM1
i .kC 1/ < �VM1
i .k/C uT .k/u.k/, k 2�knm, knmC�
nm
�(11)
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

STATE ESTIMATION FOR SHORT-TIME SWITCHED LINEAR SYSTEMS 557
For mode M2, we choose VM2
i .e/D eTPie, and using (8), we can obtain
VM2
i .kC 1/ < �VM2
i .k/,�knmC�
nm, knmC1
�(12)
As for the overall system, we let
V.k/DX
i2I M1
i .k/VM1
i .�/CX
i2I M2
i .k/VM2
i .e/
DX
i2I�T
M1
i .k/Pi� CX
i2IeT
M2
i .k/Pie (13)
where M1
i .�/ WZC! f0, 1g, M2
i .�/ WZC! f0, 1g, andPi2I
M1
i .k/CPi2I
M2
i .k/D 1.From (11)–(13) and the fact that kuk6 � , it arrives
V.kC 1/ <
(�V.k/C �2 k 2
�knm, knmC�
nm
��V.k/ k 2
�knmC�
nm, knmC1
� (14)
Hence, we deduce
V.kC 1/ <
(�k�k
nmV
�knm�C �2
PklDknm
� l�knm k 2
�knm, knmC�
nm
��k�k
nm��
nmV
�knmC�
nm
�k 2
�knmC�
nm, knmC1
� (15)
For � > 1, we havePklDknm
� l�knm D 1��k�k
nm
1��6 1���
nm
1��and k 2
�knm, knmC�
nm
�, and as �nm 6
�nmax, we obtainPklDknm
� l�knm 6 1���
nmax
1��. If � D 1, we have
PklDknm
� l�knm 6 k � knm 6 �nmax.
Thus, (15) becomes
V.kC 1/ <
(�k�k
nmV
�knm�C �2� k 2
�knm, knmC�
nm
��k�k
nm��
nmV
�knmC�
nm
�k 2
�knmC�
nm, knmC1
� (16)
where �D
.1� ��
nmax/=.1� �/ � > 1
�nmax � D 1. Then, assuming k 2
�knm, knmC�
nm
�(the results when
k 2�knmC�
nm, knmC1
�can be derived similarly), we can obtain
V.k/ < .2=1/Tn=�nave�k
nM�kn0 V
�kn0�C �2�
�1C
XM
lD1.2=1/
l�knM�knM�l
�(17)
By Definition 2, we have .2=1/l < .2=1/.knM�knM�l/=�
nmin , and by some manipulations, we see
XM
lD1.2=1/
l�knM�knM�l < ˇ
where ˛ D ln.2=1/=�nminCln � and ˇ D e˛�nmax�1� e˛M�
nmax�=�1� e˛�
nmax�. Therefore, (17) arrives
V.k/ < .2=1/Tn=�nave�k
nM�kn0 V
�kn0�C �2�.1C ˇ/ (18)
When k 2�knm, knmC�
nm
�, we can derive
V.k/D �TPi� D �TR1=2QiR1=2�T > infi2I fmin.Qi /g �TR�T
> infi2I fmin.Qi /g eT .t/Re.t/
where Qi DR�1=2PiR�1=2 and RD diag.R, I /. Also,
V�kn0�6 supi2Ifmax.Qi /g �T
�kn0�R�
�kn0�
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

558 W. XIANG, J. XIAO AND M. N. IQBAL
Using the fact��x �kn0 ��� 6 �, we obtain �T
�kn0�R�
�kn0�D eT
�kn0�Re
�kn0�C xT
�kn0�x�kn0�6
ı2C�2, which implies that
V�kn0�D �T
�kn0�Pi�
�kn0�6 supi2Ifmax.Qi /g .ı2C�2/ (19)
Altogether (18), (19), and M < Tn=�ave, Tn D knM � kn0 , the following inequality can be derived
eT .k/Re.k/ <.2=1/
Tn=�nave�Tn supi2I fmax.Qi /g .ı2C�2/infi2I fmin.Qi /g
C�2�.1C ˇ/
infi2I fmin.Qi /g,8k 2 �sn
(20)
Because of (7), we have 1R < Pi < 2R) 1I <R�1=2PiR�1=2 < 2I ) 1I <Qi < 2I ,which implies supi2I fmax.Qi /g 6 2 and infi2I fmin.Qi /g > 1. Therefore, by (10), we haveeT .k/Re.k/ < "2. �
If we consider synchronous switching, that is, �nmax D 0, we have � D 0. Then, the error dynam-ics is governed by M2 regardless of system state x. Thus, we can choose �D 0 in (10). Theorem 1is then reduced to the following corollary.
Corollary 1Consider switched system (1) with average dwell time �nave. If there exist a set of matrices Pi and Xiand scalars 1 > 0, 2 > 0 and � > 1 such that
1R < Pi < 2R (21)
��Pi PiAi �XiCi� ��Pi
< 0 (22)
.2=1/Tn=�aveC1ı2�Tn � "2 < 0 (23)
then error dynamics (4) with Li D P�1i Xi is finite-time stable with respect to .ı, ",R, Tn/.
Remark 1As a critical step to implement the augmented observer composed of asymptotic and boundednessobservers, the classification of time intervals into short-time intervals and relatively long intervalsis required. Thus, the start and end of corresponding short-time and long intervals have to be deter-mined so as to switch on/off the corresponding observers. In practice, parameter Tn may be difficultto obtain. But, it is easy to see that we can choose the upper bound T � to satisfy Theorem 1 orCorollary 1. Thus, if Tn D T �, we can determine kn0 , which is the start time of �sn, and othertimings can also be figured out. In synchronous case, the timings can be exactly determined. Fur-thermore, when asynchronous switching is considered, because there exists a mode-mismatchedtime unit that is always much smaller than T �, the upper bound T � can be enhanced slightly asT �C�max, where �max D sup
˚�nmax
�, to ascertain other timings.
Once the state bound " is not ascertained, we will be interested in observer gains with minimalvalue "min. If we denote 1 D 1 and 2 D �, (7) and (10) become�
R 0
� R
<
�Pi 0
� Qi
< �
�R 0
� R
(24)
"2 > �1CTn=�nave�Tn.ı2C�2/C �2�.1C ˇ/ (25)
Then, the following optimization problem can be constructed
min� s.t. (8), (9), and (24) (26)
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

STATE ESTIMATION FOR SHORT-TIME SWITCHED LINEAR SYSTEMS 559
with optimized gains Li D P�1i Xi and "min D ıp�1CTn=�
nave�Tn.ı2C�2/C �2�.1C ˇ/. On the
basis of (26), we construct the parameter search algorithm as follows:
Algorithm 1
Step 1 Initialize � D 1, set a variation value �� > 0 and termination value N� .Step 2 Setting � D � C�� , solve (26) with a fixed � .Step 3 When (26) is solvable for the first time, record � as �min. Then, if � > �minC N� , terminate
procedure; otherwise, record the parameters .� , "min/ pair-wisely and go back to Step 2.Step 4 Select Q� with smallest "min recorded in Step 3.Step 5 Obtain the local optimal observer gains and "�min near Q� by an unconstrained nonlinear
optimization approach.
Besides Algorithm 1, according to augmented observer idea, the asymptotic observer for eachsystem has to be designed, which can be easily obtained by linear system theory.
4. NUMERICAL EXAMPLES
Consider a switched system with two subsystems without input as follows:
A1 D
��0.6051 0.2615
0.0253 0.7435
,A2 D
��0.1620 0.8613
0.4357 0.0641
,
C T1 D
��1.7273
0.7160
,C T2 D
�0.0366�0.1849
Here, the short-time interval is Œ0, 20�, and the switching sequence is S1 WD f0, 8, 16, 20g.
Let ı Dp2, R D I , Tn D 20, and � D 1 to obtain L1 D
�0.3527 0.1400
�Tand
L2 D��4.6492 0.1320
�Twith "�min D 1.4144 by Corollary 1. The simulation under syn-
chronous switching is shown in Figure 4. Now, we assume the switching signal of observer delaysfor two steps, and the simulation is in Figure 5.
Explicitly, although the design result works efficiently in synchronous case, it is not obtain-able under asynchronous case anymore, because kek is not bounded in the boundary "�min D
1.4144. So, we resort to Theorem 1 to obtain L1 D�
0.1956 0.2733�T
and L2 D��0.1298 0.4493
�Twith "�min D 5.0954, and the simulation result is given in Figure 6.
Figure 4. kek under synchronous switching.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

560 W. XIANG, J. XIAO AND M. N. IQBAL
Figure 5. kek under asynchronous switching.
Figure 6. kek under asynchronous switching.
We can observe that Theorem 1 concerned with asynchronous switching is more general and hasobvious advantages. Moreover, in this example, we choose the system without input; actually if weconsider input u.k/, it is easy to see that although the design result works efficiently in synchronouscase, it is not satisfied under asynchronous case because we can choose u.k/ large enough to breakthe specified boundary in M1, and similar results can be easily obtained.
5. CONCLUSIONS
In this paper, the state estimation problem for short-time switched systems is addressed. By inves-tigating the general asynchronous switching, the finite-time observer is designed. Moreover, thesynchronous switching is only a particular case covered by our approach. An LMI-based designalgorithm is proposed. A numerical example is provided to illustrate our results.
ACKNOWLEDGEMENT
This work is supported by the National Natural Science Foundation of China (51177137 and 61134001).
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs

STATE ESTIMATION FOR SHORT-TIME SWITCHED LINEAR SYSTEMS 561
REFERENCES
1. Luenberger D. Observers for multivariable systems. IEEE Transaction on Automatic Control 1966; 11(2):190–197.2. Alessandri A, Coletta P. Switching observers for continuous time and discrete-time linear systems. In Proceedings
of the American Control Conference, Arlington, VA, 2001; 2516–2521.3. Juloski LA, Heemels WPMH, Weiland S. Observer design for a class of piecewise affine systems. In Proceedings of
the 41st IEEE Conference on Decision and Control, Las Vegas, Nevada, USA, 2002; 2606–2611.4. Juloski LA, Heemels WPMH, Boers Y, Verschure F. Two approaches to state estimation for a class of piecewise
affine systems. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, Hawaii, USA, 2003;143–148.
5. Pettersson S. Observer design for switched systems using multiple quadratic Lyapunov functions. In Proceedings ofthe 2005 IEEE International Symposium on Intelligent Control, Cyprus, 2005; 262–267.
6. Barbot JP, Saadaoui H., Djemai M, Manamanni N. Nonlinear observer for autonomous switching systems withjumps. Nonlinear Analysis: Hybrid System 2007; 1:537–547.
7. Chen W, Mehrdad S. Observer Design for Linear Switched Control Systems. In Proceedings of the American ControlConference, Boston, Massachusetts, USA, 2004; 5796–5801.
8. Xiang W, Xiao J, Iqbal MN. Robust observer design for nonlinear uncertain switched systems under asynchronousswitching. Nonlinear Analysis: Hybrid Systems 2012; 6(1):754–773.
9. Xiang W, Xiao J. H1 finite-time control for switched nonlinear discrete-time systems with norm-boundeddisturbance. Journal of the Franklin Institute 2011; 348(2):331–352.
10. Hetel L, Daafouz J, Iung C. Stability analysis for discrete time switched systems with temporary uncertain switchingsignal. In Proceedings of IEEE 46th Conference on Decision and Control, New Orleans, LA, 2007; 5623–5628.
11. Mhaskar P, El-Farra EH, Christofides PD. Robust predictive control of switched systems: satisfying uncertainschedules subject to state and control constraints. International Journal of Adaptive Control and Signal Processing2008; 22(2):161–179.
12. Xie W, Wen C, Li Z. Input-to-state stabilization of switched nonlinear systems. IEEE Transactions on AutomaticControl 2001; 46(7):1111–1116.
13. Xiang Z, Wang R. Robust control for uncertain switched nonlinear systems with time delay under asynchronousswitching. IET Control Theory Applications 2009; 3(8):1041–1050.
14. Xiang W, Xiao J.H1 filtering for switched nonlinear systems under asynchronous switching. International Journalof Systems Science 2011; 42(5):751–767.
15. Zhang L, Shi P. Stability, L2 gain and asynchronous control of discrete-time switched systems with average dwelltime. IEEE Transactions on Automatic Control 2009; 54(9):2193–2200.
16. Amato F, Ariola M. Finite-time control of discrete-time linear systems. IEEE Transactions on Automatic Control2005; 50(5):724–729.
17. Amato F, Ambrosino R, Ariola M, Cosentino C. Finite-time stability of linear time-varying systems with jumps.Automatica 2009; 45(5):1354–1358.
18. Ambrosino R, Calabrese F, Cosentino C, De Tommasi G. Sufficient conditions for finite-time stability of impulsivedynamical systems. IEEE Transactions on Automatic Control 2009; 54(4):861–865.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Adapt. Control Signal Process. 2014; 28:553–561DOI: 10.1002/acs