Embed Size (px)
DESCRIPTION
Statistical Model Calibration and Validation. C12. Overview. Grey box models and model calibration Data analysis and preprocessing Model parameter and structure estimation: linear-nonlinear static-dynamic Model validation. A Systematic Modelling Procedure. 1. 4. 7. - PowerPoint PPT Presentation
Citation preview

© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Statistical Model Calibration and Validation
C12C12

2
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Overview
Grey box models and model calibration Data analysis and preprocessing Model parameter and structure estimation:
linear-nonlinear static-dynamic
Model validation

3
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
A Systematic Modelling Procedure
Problem definition
Controlling factors
Problem data
Model construction
Model solution
Model verification
Model calibration &
validation
1
2
4 7
5
3 6

4
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Grey-box Models
Process models
developed from first engineering principles (white box part)
part of their parameters and/or structure unknown (black box part)
are called grey-box models

5
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model CalibrationConceptual Problem Statement
Given:
grey-box model calibration data (measured data) measure of fit (loss function) Estimate: the parameter values and/or structural elements

6
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model CalibrationConceptual Steps of Solution
Analysis of model specification Sampling of continuous time dynamic models Data analysis and preprocessing Model parameter and structure estimation Evaluation of the quality of the estimate

7
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Sampling of Continuous Time Dynamic Models
Equi-distant zero-order hold samplinginpu t
t0 t1 t2 t3t4 tim e...
u(0)
u(1)
u(2)
u(4)
Discrete time input signal: u : {u(k)=u(tk) | k=1,2,...}
output signal: y : {y(k)=y(tk) | k=1,2,...}

8
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Sampling of Continuous Time Dynamic Models
Model parameters (1st order approximation))
Discrete time model equations:
model parameters: = I+Ah , = Bh ( ,,C,D)
Continuous time model equations:
model parameters: (A ,B,C,D)
)()()(
)()()1(
kDukCxky
kukxkx
)()()( tButAxtx

9
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Data Analysis and Preprocessing -Data Screening-
gross errors outliers trends
Data visualization Outlier tests Trends, steady state tests Gross error detection
Check measured data for:
Methods to be used include:

10
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
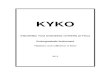
Data Screening - Visualization
Gross errors
0 10 20 30 40 50 60 70 80 900
2
4
6
8
10
12
14
16
18
Time (minutes)
Ton
nage
rat
e
Instrument off-line

11
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
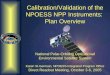
Data Screening - Visualization
Trends and jumps
0 20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (minutes)
Con
cent
ratio
n
Outliers
Instrument recalibration

12
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Experimental Design for Parameter Estimation
Static modelsnumber of measurements test point spacing test point sequencing
Dynamic models (in addition) sampling time selectionexcitation
Pseudo Random Binary Signal (PRBS)

13
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model Parameter and Structure Estimation
Conceptual problem statement Least Squares parameter estimation
- estimation procedure - properties of the estimate - linear and nonlinear models
Parameter estimation for static models Parameter estimation for dynamic models

14
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Problem Statement of Model Parameter Estimation
Given: System model: Set of measured data: Loss function:
Compute: an estimate such that)( of ˆ Mpp
min || || )( )( MyypL
),( )()( MM pxy
kiiyixkD ,...,1|)(),(],1[
)()( MyypL

15
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Problem Statement of Model Structure Estimation
Given: System model:
(not parametrized) Set of measured data: Loss function: Compute: an estimate such that + “candidate structures” in
},...,1|)(,],1[ kiiyx(i)kD {
|| || )( )(MyypL
min )( pL
)()( xy M
of ˆ
DOM

16
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Least Squares (LS) Parameter Estimation
Given: System model:
linear in p, single y(M)
Measured data: Loss function:
Compute: an estimate
such that
n
iii
TM pxpxy1
)(
m
j
Mij
Mm
iWSOS iyiyWiyiypL
1
)()(
1
))()(())()(( )(
min )( pL
)( of Mpp
miixixiyid n ,...,1 , ))(),...,();(()( 1

17
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Properties of LS Parameter Estimation
Estimation:
with Gaussian measurement errors: unbiased: covariance matrix:
)(
...
)2(
)1(
,
)(...)()(
......
)2(...)2()2(
)1(...)1()1(
)(ˆor ˆ)(
21
21
21
1
my
y
y
y
mxmxmx
xxx
xxx
X
yXWXXpWyXpWXX
n
n
n
TTTT
ppE }ˆ{
})ˆ{,(~ˆ ppp COVN
1)(}ˆ{ WXXp TCOV

18
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Assessing the Fit
Residuals are independent and
residual tests correlation coefficient measures
r r r
r
x
x x x
+
+
+
+
+
+ +
+
+
++
++
+++
+
+ ++ +
+
+
+
+
+
+
+
+
++
+
+
+
+
++
+
r andom
non r andom
),0(~ Nr

19
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Confidence Regions and Intervals
Individual confidence intervals:
iippi pssmtpii
}]ˆ{[ , )2
11,(ˆ COV
p 1
p 2p 2(M)
A
B
E
p 2L p 2U
p 1L
p 1(M)
p 1U

20
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
LS Parameter Estimation for Nonlinear Models
Solution Transformation into linear form Solution by (numerical) optimization Properties
has lost its nice properties - non-normally distributed - confidence region and confidence intervals are not symmetric - unbiased
p̂

21
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Confidence Interval for Nonlinear Parameter Estimation
Sum-of-squares as a function of a parameter2
2
)(
1)( )()( iyiyL M
k
ipSOS

22
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Static Models Linear in Parameters
General form
n
i
Mii
MTM pxpxy1
)()()(
Examples
T2
0
)()( ] ... 1[ ,
xpyi
Mi
iM
TAA
M
TAA
RT
E-
A
] CRT
[x ry
][T Cx Ckr
1 1 ,)ln(
' ,e
)(
0

23
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Identification: Model Parameter and Structure Estimation of Dynamic Models
Properties of the estimation problemvariables (y and x) are time dependent
orderedx : present and past inputs and outputs
measurement errors on both y and xSteps 1. sampling continuous time models
2. estimation
)}(),(),...,1(),1();({)( kukyuyux
},...,1|)(),({],1[ kxykD

24
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Parameter Estimation of Dynamic Models Linear in Parameters
General form of the input-output model
LS parameter estimation with
N
i
MSOS iyiyL
1
2)( ))()((
},0;,..,1;,..,1|)(),({)(
)()()(1
)()()(
krkmjuyd
pdpdy
kji
n
i
Mii
MTM

25
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Parameter Estimation of Nonlinear Dynamic Models
Lum ped dynam ic m odel(ODE or DAE withinitial conditions)
)0()( ˆˆ PP k
)0(ˆ
parameters
ofset Initial
P
)ˆ;(
estimates Generates)()( kM Pty
Solve DAE fort = [0,1 ..., T]
Estim ate LS O S
Min LS O S ?
Optim izer chooses)1(ˆ kP
)1()( ˆˆ kk PP
)(ˆ estimates
parameter with EndkP

26
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Statistical Model Validation via Parameter EstimationConceptual Problem Statement
Given: a calibrated model validation data (measured data) measure of fit (loss function)Question: Is the calibrated model “good enough” for the purpose?(Does it reproduce the data well?)

27
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
A Systematic Modelling Procedure
Problem definition
Controlling factors
Problem data
Model construction
Model solution
Model verification
Model calibration &
validation
1
2
4 7
5
3 6