Embed Size (px)
Citation preview

Steer-by-Wire Project Presentation
Group 7 ME 462
Sponsor: Dr. Sohel Anwar Spring 2007
Donny FranzenJimmy Huser
Ugo AnyaorahStephen Chittenden

Contents Introduction Customer Requirements Design Targets Design Changes Modeling and Analysis Analysis Results Modeling – Machining Completed Project – Demonstration Acknowledgements

Introduction Steer-by-Wire System
No Mechanical Connection between steering column and the wheels of the vehicle
Common practice in commercial airline industry Convert rotational motion into electrical signal Input electrical signal into motor for torque feedback
Torque Feedback – return to center and future inputof external stimulus (curb, pot-hole, etc.)
Installation into Bench Test System Simulate Mechanical Steering response and feel Portable & Easily Manipulated

Customer Requirements
Measure Turn Angle Conventional Feel
Torque Feedback End Stops Return-To-Center
Reliability
Quiet and Seamless Operation
Size Maintenance Safety Cost

Design Targets
Lock-To-Lock: 1080o
Angle Measurement Resolution: 0.5o
Redundancy: 3 Sensors
Torque Adjustable: 1-15 Nm Max (Endstop): 30 Nm
Return-To-Center Position: +/- 5o
Speed: 800 deg/sec (max)
Maximum Noise: 20 dB Minimum Cycles to Failure:
10 million Smooth Feel To User: 95% Conventional Design
Envelope: 510 in3
Mean Time Between System Maintenance: 50K miles
Minor Cost Differential to Conventional System: $0

Design Changes Sensors Motor End Stop Envelope Configuration Ball Bearing Locations Steve got engaged and Accepted to Law School

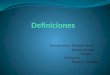
Modeling and Analysis Highest Priority Stress Concerns in End Stop

Analysis Results Results Positive for Proper Function
Torque = 120 in.lb
Force = 3000 lb
Max Deflection = 0.0013 in Max Stress = 12 Ksi Yield Stress = 40 Ksi

Modeling Machined Parts

Completed Project System Demonstration

Special Thanks
John Snodgrass Daniel Aw

Questions