Embed Size (px)
Citation preview

Stochastic Euler-Bernoulli beam driven by additive white noise:
global random attractor and global dynamics
Huatao Chena , Juan Luis Garcıa Guiraob, Dengqing Caoc, Jingfei Jiang a andXiaoming Fand
a Division of Dynamics and Control, School of Mathematics and Statistics,Shandong University of Technology, 255000, Zibo,China
b Departamento de Matematica Aplicaday Estadıstica, Universidad Politecnica de Cartagena,30203-Cartagena, Spain
c Division of Dynamics and Control, School of Astronautics, Harbin Institute of Technology,150001, Harbin,China
d School of Mathematics, Southwest Jiaotong University, 610031, Chengdu, China
ARTICLE HISTORY
Compiled December 10, 2018
ABSTRACTBy verifying the existence of absorbing set and obtaining the stabilization estimationwhich plays mythical role in achieving the asymptotical compact of the stochasticEuler-Bernoulli beam equation, the existence of global random attractors that at-tracts all bounded sets in phase space are proved. Furthermore, the finite Hausdorffdimension for the random attractors is attained. In light of the relationship betweenglobal random attractor and random invariant probability measure, the global dy-namics of the beam are analyzed according to numerical simulation on global randombasic attractor and global random point attractor.
KEYWORDSStochastic Euler-Bernoulli; global random attractors; Hausdorff dimension; globaldynamics
1. Introduction
Global attractor can capture the long-time behavior of dynamical systems, for the au-tonomous case, see [1, 2]. Refs [3, 4] was dedicated to the nonautonomous circumstance.Crauel and Flandoli [5, 6], Schmalfuss [7] developed the concept of global random at-tractor for random dynamical system (RDS)[8] which cover some of the most commonclasses of systems involving randomness and time evolution and proved that the ran-dom attractor satisfies most of the properties satisfied by the usual attractor in thetheory of deterministic dynamical systems. When the global attractors exist, what isthe structure of these global invariant set is an fascinating topic in the investigationson the behavior of the dynamical systems. From the analytical view, it is a pity thatthe global attractors may be a very complicated set, sometimes with fractal structure.Essentially, the Hausdorff dimension is one of the few pieces of information which
Email address:[email protected](HC);[email protected](DC);[email protected](JLG);
[email protected](JF);[email protected](XF).

is associated the global attractors. Temam[1] proposed the approaches to attain theHausdorff dimension estimations of global attractor for autonomous infinite dynami-cal systems, the methods to estimate the Hausdorff dimension of global attractors innonautonomous case were due to [3, 9]. The approach derived by Debussche [10] ispowerful to estimate the Hausdorff dimensions for random attractors. Invoking thesemethods, a plenty of mathematical physics problems which can generate a RDS havebeen studied by many researchers, various and wonderful phenomenon about long-timebehavior are attained, such as [11, 12, 13, 14, 15, 16, 17, 18] and the references therein.From practical standpoint, numerical method is the predominant approach to capturethe structure of the global attractors. Relying on pullback technique [8], Keller andOchs [19] extended the subdivision algorithm accomplished by Dellnitz and Hohmann[20] to achieve numerical simulation on random attractors. On the other hand, thestudy on global dynamics of nonlinear oscillations arose from the practical problemswhich can reveal more dynamic information than local dynamics is the frontier topicin engineering applications. Once global attractor exists, the assertion that importantinformation on global behavior is captured by the global attractor indicates the in-vestigation on global dynamics can be realized by analysing the structure of globalattractor.
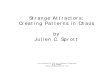
The vibration of Euler-Bernoulli beam described by Figure 1 can be modeled byequation (1),
Q
P
o x
y
Figure 1. The model for vibration of Euler-Bernoulli beam
EI∂4U
∂X4+ δ
(∂U
∂T
)+
[P − EA
2L
∫ L
0
(∂U
∂X
)2
dX
]∂2U
∂X2= Q− ρA∂
2U
∂T(1)
where E is the elastic modulus, I denotes the moment of inertia, A is the area of thesection of the beam, H represents the thickness, L is the length of the beam, P is theaxial loading, Q is the external force, U is the lateral displacement, X is the location ofthe beam, T denotes the time, δ(U t) represents the damping, ρ is the density. Accord-ing to nondimensionalized process, the following dimensionless dynamical equation ofvibration of Euler-Bernoulli beam can be got
utt + α(ut) + ∆2u+
[f2 − β
∫ L
0|∇u|2 dx
]∆u = f1, (2)
with the boundary condition
x = 0 : u = ux = 0;x = L : u = uxx = 0. (3)
Euler-Bernoulli beam is a momentous topic in engineering applications, practical mod-els of these are railroad tracks, continuously supported piles, slender wings of aircraft.
2

For more detail about the modeling and application in engineering, we refer to Ref[21].
The investigations focus on existence and uniqueness of solution, stability for Euler-Bernoulli beam can refer to [22, 23, 24] and the references therein. Morgu [25] andGuo et.al [26] addressed the boundary control of Euler-Bernoulli beam. In some situ-ations, the Euler-Bernoulli beam equations can generates infinite dynamical systems,there exist extensive achievements on the long-time behavior, see Ref [27, 28, 29, 30]and the references therein. It is mentioned here the Euler-Bernoulli beams dealt within most of the aforementioned investigations often possess a nonlinear source whichmainly derived from the control theory for beams, as for the study on vibration ofbeams, this term hardly exist. Motivated by problems to model the large amplitudevibrations of an elastic panel excited by aerodynamic forces, Chow and Menaldi in [31]considered a beam described by the equation (2) and subjected to a force includingrandom fluctuations, which means f2 is a constant, f1 denotes white noise or otherstochastic process, then system (2) can induce a RDS in certain status. Brzezniak [32]have addressed the problems related to solution for the beam. To our best knowledge,there exists few results on global random attractor for this kinds stochastic system.
Recently, abundant literatures handled the local dynamics for Euler-Bernoulli beam,for instance, Ref [21, 33] and the references therein. Compared with the compositionsfor local dynamics, the investigations on global dynamics of Euler-Bernoulli beams arenot enough. Wiggins [34] studied the global dynamics of four-dimensional perturbedHamiltonian systems by the Melnikov method. Following the same manner, the studytackled global dynamics for parametrically forced mechanical systems was institutedby Feng and Wiggins [35]. the global bifurcation and chaos for parametrically ex-cited Euler-Bernoulli beam have be dealt by Zhang [36]. Invoking Cell to cell mappingmethod [37], Xu et.al [38] concerned with global stochastic bifurcation in Duffing sys-tem. As for the study on behavior of dynamical system, there exist two views, one isthe ”static” standpoint, the other is the ”dynamical” standpoint. In the deterministiccase, the two considerations are the same, however, there do not generally exist con-nection between the two views in the stochastic status. for more detail, we refer to[8, 39]. In term of the relationship between global random attractor which attracts allbounded sets in phase space and probability Invariant measure proposed by Crauelin Ref [40, 41], this paper analyzes the global ”dynamical” dynamics for a stochasticEuler-Bernoulli numerically. The motivation comes from the literature [42, 43].
Some spaces are introduced here to formulate the model in abstract form. Let‖u‖ ≡ ‖u‖L2(D),‖u‖s ≡ ‖u‖Hs
0 (D),(u, v) ≡ (u, v)L2(D),(u, v)s = (u, v)Hs0 (D), where
Hs(D), Hs0(D), s ∈ R are the usual Sobolev Spaces. H2
l (D) denotes space spaceof H2(D) functions subjected to boundary condition (3), let ‖u‖l,2 = ‖u‖2, interm of Section 1.4, Charpter II in Temam [1], it can be verified that the spaceH2l (D) equipped with norm ‖u‖l,2 is a Banach space. Furthermore, set (·, ·)l,2 be
the inner product induced by norm ‖u‖l,2, then H2l (D) is a Hilbert space. Let
A := ∆2 : (H4⋂H2l )(D) ⊂ L2(D) → L2(D), then A is self-adjoint, positive, un-
bounded linear operators and A−1 ∈ L (L2(D)) is compact. So, their eigenvaluesΛii∈N satisfy 0 < Λ1 ≤ Λ2 ≤ · · · → ∞ and the corresponding eigenvalues ei∞i=1forms an orthonormal basis in L2(D). So, we can interpret the power of As, s ∈ Rby the method in [1]. Thus the abstract Euler-Bernoulli beam equation with stronglydamping driven by additive white noise is as follow
utt + αA1
2ut +Au+[β ‖∇u‖2 − f2
](−∆)u = σq(x)W , (4)
3

with the boundary condition (3), where α > 0, β > 0 are constants, A1
2ut is referred asdamping with strongly form, W is the one dimensional two-sided real-valued standardWiener process, then W represents the with noises. This paper concerns with thedynamical behavior for system (4). the existence and estimation of expectation ofthe radius for random attractor are derived. Secondly, following the manner exploitedin [10], the finite Hausdorff dimensions estimations of random attractors is obtained.Finally, Merging the above theoretical results with the support relationship betweenrandom attractors and probability Invariant measures, the global dynamics of thebeam are studied numerically.
The rest of this paper is organized as follows. In Section 2, some notations and themain results on dynamical behavior for system (4) are listed. Section 3 is devoted topresent some basic theory for RDS and prove some Lemmas which are used in mainproofs given in Section 4.
2. Notations and main results
2.1. Notations
For the sake of expressing the main results, some notations and assumptions are pro-vided.
In term of the compactness of A, the Hilbert space D(As), s ∈ R with norm ‖ · ‖sand (·, ·)s can be defined as the mechanism in [1]p55, especially, D(A
1
2 ) = H2l (D).
Moreover, for any s1, s2 ∈ R, s1 > s2, D(As1) can be compact imbedding in D(As2),and the following holds
‖u‖s1≥ Λ
s1−s22
1 ‖u‖s2, ∀u ∈ D(As1). (5)
Let E1+2s = D(A1
2+s)×D(As), 0 ≤ s ≤ 1
2 equipped with Graph norm and the induced
inner product, then they are all Hilbert spaces. Specifically, ‖A1
4u‖ = ‖∇u‖, ‖A1
2u‖ =
‖∆u‖, ∀u ∈ D(A), however, it is mentioned here that A1
2 6= −∆, A1
4 6= ∇. In fact, theoperator A1 := −∆ with boundary condition (3) is a self-adjoint, positive, unboundedlinear operators from L2(D) to L2(D) and A−1 ∈ L (L2(D), L2(D)) is compact. Thus,following the the mechanism in [1]p55, the power of (−∆)s, s ∈ R can also be defined,furthermore, ‖As1u‖ ≤ ‖A
s
2u‖, ∀s ∈ [0, 1], u ∈ D(A).Let (X, ‖ · ‖X) be a separable space with Borel σ− algebra B(X) and (Ω,F , P ) be
a probability space. θt : Ω→ Ω, t ∈ R is a family of measure preserving transforma-tions such that (t, ω)→ θtω is measurable, θ0 = id, θt+s = θt θs for all s, t ∈ R. Thenthe flow θt together with the probability space (Ω,F , P, θtt∈R) is called a metric dy-namical system. For the particular applications in this paper, the metric dynamical sys-tems generated by a one dimensional two-sided standard Wiener process defined on aProbability space (Ω,F ,P) is introduced there. Let Ω = ω|ω(·) ∈ C(R,R), ω(0) = 0,F is the σ− algebra induced by the compact open topology for this set and P is theWiener measure on F . Set
θtω(·) = ω(·+ t)− ω(·), ∀t ∈ R, (6)
then according to Ref [8], we have P is ergodic with respect to the flow θtt∈R. Thus,the (Ω,F ,P, θt∈R) is the metric dynamical systems employed in this paper.
4

In order to implement the metric dynamical systems employed in this paper, weintroduce Ornstein-Uhlenbeck Process in the following
dz + µzdt = dW,z(−∞) = 0.
(7)
the general form for the solution of (7) is
z(t) =
∫ t
−∞e−µ(t−s)dW.
Let
z(θtω) := −µ∫ 0
−∞eµτ (θtω)(τ)dτ. (8)
By merging with integration by parts, z(θtω) is the solution for system (7).The following definition of RDS was inaugurated by Arnold [8].
Definition 2.1. [8] A random dynamical system (RDS) on Polish space (X, d) withBorel σ− algebra B(X) over a metric dynamical system (Ω,F , P, θtt∈R) is a (B(R+)×F × B(X),B(X))measurable mapping
φ : R+ × Ω×X → X, (t, ω, x) 7→ φ(t, ω)x
such that, for P − a.s.ω ∈ Ω,(i). φ(0, ω) = id on X.(ii). φ(t+ s, ω) = φ(t, θsω) φ(s, ω) for all s, t ∈ R+.
A RDS is continuous or differential if φ(t, ω) : X → X is continuous or differential.Furthermore, it is emphasized that RDS φ(t, θ−tω) can be understood as the solutionstart from −t to 0.
The coming definitions related to random attractors for RDS was established byCrauel and Flandoli [5, 40].
Definition 2.2. A random set K(ω) is said to absorb the set B ⊂ X for a RDS φ, ifP − a.s. there exists tB(ω) such that
φ(t, θ−tω)B ⊂ K(ω) for all t ≥ tB(ω)
Definition 2.3. Let B ⊂ 2X is a collection of subsets of X, then a closed random setA(ω) is called B-random attractor associated with the RDS φ, if P − a.s.
(i). A(ω) is a random compact set.(ii). A(ω) is invariant i.e. φ(t, ω)A(ω) = A(θtω) for all t ≥ 0(iii). For every B ∈ B,
limt→∞
dist(φ(t, θ−tω)B,A(ω)) = 0
5

where dist denotes the Hausdorff semidistance:
dis(A,B) = supx∈A
infy∈B
d(x, y), A,B ⊂ X.
When B is composed of all bounded set of X, thenA(ω) is the global random attractorsfor φ. If B = x : x ∈ X, A(ω) is said to be global random point attractor.
As for the system (4), we make some assumptions and transformations. Suppose f2
is a constant, β > 0 is a constant and
q(x) ∈ H2l (D). (9)
Set v = ut and
Tε : [u, v]T → [u, v + εu] ≡ [u, v]T , (10)
N(u) =[β ‖∇u‖2 − f2
](−∆)u. (11)
here [·, ·]T means the transpose of [·, ·]T , ε is a positive constant, moreover, the trans-formation Tε is invertible. Then equation (4) can be casted in the form of evolutionequation
dU
dt= AU + F1(ω,U) (12)
where U = [U1, U2]T = [u, v]T ,
A =
(−εI, I
−A+ ε(αA1
2 − ε), −(αA1
2 − ε)I
),
F1(ω,U) =
(F11(ω,U)F12(ω,U)
)=
(0
−N(U1) + σq(x)W
).
Then system (4) and system (12) are equivalent.
Let U(1) = [U(1)1 , U
(1)2 ] = [u1, v1],U(2) = [U
(2)1 , U
(2)2 ] = [u2, v2] are two solutions of
(12), then
dU(1) −U(2)
dt= A
(U(1) −U(2)
)+ F1(ω,U(1))− F1(ω,U(2)). (13)
System (13) can be used to obtain the stabilization estimation for the solution ofsystem (12).
In order to estimate the Hausdorff dimensions of the random attractors for system(12), the following equations is needed,
dU
dt= AU + F(U)U, (14)
6

where
F(U) =
(F1(U), F3(U)
F2(U), F4(U)
)=
(0, 0
−Nu(U1), 0
)On the other hand, let v = v − σq(x)z(θtω), defining
T (θtω) : [u, v]T → [u, v − σq(x)z(θtω)]T ≡ [u, v], (15)
where z(θtω) is the solution of system (7), then, T (θtω) is a diffeomorphism [44]. Interm of T (θtω) and Ito formula, the next system can be got,
dΦ
dt= AΦ + F2(θtω) + F3(Φ), (16)
where Φ = [Φ1,Φ2]T = [u, v]T ,
F2(θtω) =
(F21(θtω)F22(θtω)
)=
(σq(x)z(θtω)
σ(µ− αA1
2 + ε)q(x)z(θtω)
),
F3(Φ) =
(F31(Φ)F32(Φ)
)=
(0
−N(Φ1)
).
Obviously, system (16) is a system in deterministic form with coefficient ω, which canbe studied ω by ω, as if it is a non-autonomous deterministic system. However, it ismentioned that system (16) are not equivalent to system (12).
Based on the equivalent between system (4) and system (12), it is enough to onlyaddress the dynamical behavior of system (12).
2.2. Main results
This subsection is used to list the main results of this paper. Let
ε0 = min
Λ
1
2
1 ,Λ
1
2
1α
8(Λ1 + α2)
, 0 < ε ≤ ε0, (17)
the following theorem concern with the existence and uniqueness for solution of system(16).
Theorem 2.4. For any τ ∈ R and initial value Φτ ∈ E1, system (16) possessesuniqueness(mild)solution Φ(t, τ, ω; Φτ ) ∈ C([τ, τ + T ], E1), t ∈ [τ, τ + T ], ∀T > 0.Furthermore, set Φ(t, τ, ω; Φτ ) = ϕ(t, τ, ω)Φτ , it means ϕ(t, τ, ω) is the solution map-ping induced by system (16), then
ϕ(t− τ, 0, θτω) = ϕ(t, τ, ω), ϕ(τ, τ, ω) = id.
Let
Sε(t, ω) = ϕ(t, 0, ω) = ϕ(0,−t, θtω),∀t ≥ 0,∀ω ∈ Ω.
7

Combining with Definition (2.1), Theorem 2.4 reveals that Sε(t, ω), ω ∈ Ω, t ∈ R+ isthe RDS generated by system (16), in short, denoted by Sε(t, ω). Moreover, system(12) can also induce a RDS S(t, ω) with the following from
S(t, ω) = T (θtω)−1Sε(t, ω)T (ω) : E1 → E1. (18)
Let φ(t, τ, ω) be solution mapping determined by system (12), thus
S(t, ω) = φ(t, 0, ω) = φ(0,−t, θtω), ∀t ≥ 0,∀ω ∈ Ω.
Before giving the main results on random attractors, we give some quantities. Letb ∈ R+, s0 ∈ [0, 1],
µ > µ0 =
(8√
2β|σ|‖q(x)‖)2
πε2, m0 =
ε(1 + b)2
8b, b > 0, (19)
K =
(2σ2(2α2 + 1)
ε‖A
1
2 q(x)‖2 +4σ2(µ+ ε)2
ε‖q(x)‖2
), (20)
ρ(s0, ω) = σ2‖q(x)‖2|z(θs0ω)|2 + εe−
ε
2s0
∫ s0
−∞eε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dk|z(θsω)|2Kds
+εe−ε
2s0
4εf22
7β
∫ s0
−∞eε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dkds+ δ0, (21)
ρ(s0, ω) =1
(1 + r)mr0
[ε1e− (1+b)ε
4s0
∫ s0
−∞eε(1+b)
4s+(1+b)
∫ 0
s
√2β|σz(θkω)|‖q(x)‖dk|z(θsω)|2Kds
+ε1e− (1+b)ε
4s0
(4εf2
2
7β
)1+b ∫ s0
−∞eε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dkds
]+(σ2‖q(x)‖2|z(θs0
ω)|2)1+b
+ δ0, (22)
r(s0, ω) =√ρ(s0, ω), r(ω) = max
s0∈[0,1]
√ρ(s0, ω), r(ω) =
√ρ(ω), (23)
where ρ(ω) ≡ ρ(s0, ω).
M(s0) = M0(s0) +M1(s0) +σ2‖q(x)‖2
2µ+ δ0, (24)
M(s0) = M0(s0) +M1(s0) +(σ2‖q(x)‖2)1+bΓ( b+2
2 )√πµ1+b
+ δ0, (25)
Mmax = maxs0∈[0,1]
M(s0), M b,max = maxs0∈[0,1]
M(s0), Mmax = M1,max, (26)
8

here
M0(s0) = εe−ε
2s0K
( Γ(52)
µ2√π
) 1
2 ∫ s0
T 1
eε
2s−√
2β|σ|‖q(x)‖s√µ ds+
1
2εµeεT 1
, (27)
M1(s0) = εe−ε
2s0
(4εf2
2
7β
∫ 0
T1
eε
2s−√
2β|σ|‖q(x)‖s√µ ds+ eεT 1
4εf22
7εβ
), (28)
M0(s0) = ε1e− (1+b)ε
4s0
(KΓ(52)
µ2√π
) 1+b
2 ∫ s0
T 1
e(1+b)ε
4s− (1+b)
√2β|σ|‖q(x)‖s√µ ds+
1
2ε1µeεT 1
, (29)
M1(s0) = ε1e− (1+b)ε
4s0
((4εf2
2
7β
)1+b ∫ 0
T 1
e(1+b)ε
4s− (1+b)
√2β|σ|‖q(x)‖s√µ ds+ eεT 1
4εf22
7ε1β
), (30)
where ε = ε2 −
2√
2β|σ||‖q(x)‖√πµ , ε1 = (1 + b)
(ε4 −
2√
2β|σ||‖q(x)‖√πµ
), Γ(·) is Γ function, T 1 is
a constant.The next Theorem assert the existence of global random attractor for S(t, ω) and
attain the estimation of expectation of the radius for random attractors which isindispensable to estimate Hausforff dimension.
Theorem 2.5. The S(t, ω) possesses random attractors A (ω) ⊂ E1, ω ∈ Ω, in short,denoted by A (ω),
A (ω) ⊂ B(0, r(ω)), P− a.s.
and
A (θs0ω) ⊂ B(0, r(s0, ω)), s0 ∈ [0, 1]. P− a.s.
where B0(0, r(s0, ω)) indicates the open ball centered at the origin with radius
r(s0, ω) =√ρ(s0, ω). Furthermore, E(r2(ω)) ≤Mmax,E(r2(1+b)(ω)) ≤M b,max.
Let dH(A (ω)) be the Hausdorff dimension of A (ω), according to the manner inDebussche [10], the estimation of Hausdorff dimension of global random attractors ofsystem S(t, ω) can be derived.
Theorem 2.6. Let
d = min
m ∈ Z+
∣∣∣∣∣∣∣∣1
m
m∑i=1
Λ− 1
2
i <ε
4
(βMmax
α + β2Mmax
Λ121 (Λ
121 α−ε)
) , (31)
then
dH(A (ω)) < d.
9

Specifically, if Λ− 1
2
1 ≤ ε
4
(βMmax
α+ β2Mmax
Λ
121
(Λ
121α−ε)
) , then dH(A (ω)) = 0, which reveals that
the random attractors comprise almost surly global asymptotically stable random fixedpoint [45].
The global dynamics in this paper are understood as the change in the pattern ofexisting probability invariant measures of RDS. The following assertion summarizedby Chen et.al [46] is important to expound the global dynamics for RDS.
Proposition 2.7. When the RDS ϕ possesses global random attractor comply withDefinition 2.3, by the Corollary 4.4 in Crauel [41], this attractors supports every in-variant measures. The random point attractor of ϕ given by Definition 2.3 always sup-ports at lest one invariant measure which even is a invariant Markov measure (Crauel[40],P423; Arnold [8], Theorem 1.6.13 and Theorem 1.7.5). When ϕ is a white noiseRDS, together with the Theorem 3.6 in Crauel [40], it can be asserted that every in-variant Markov measure is supported by the global point attractor. On the other hand,if the global random attractors for ϕ exists, then ϕ also has the global point attractor.For any fixed ω ∈ Ω, taking advantage of pullback mechanism [8], follow the proof ofTheorem 5.2 in Birnir [47], the global random attractor can be decomposed into twoingredients, one is random basic attractor which supports all stable invariant Markovmeasures of white noise RDS, the other is random remainder. For the definition ofbasic and remainder, we refer to Birnir [47].
The rest of this subsection is dedicated to study the global dynamics of the beam,which is accomplished by deriving the components of global random attractor numer-ically. In term of Proposition 2.7, the useful components of global random attractorsare global random point attractor and global random basic attractor.
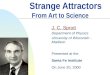
Let L = 4.5, k1 = 2, k2 = 2 in Appendix A, the eigenvalues λ4i=1 and eigenvectorswi4i=1 of operator A and integration with respect to space variable in (A2) given inAppendix A can be performed by utilizing COMSOL with Matlab [48], then, accordingto inertial manifold with delay [49] and nonlinear Gakerlin method[50], model equa-tions associated with system (4) which is displayed as equations (A1) in Appendix Acan be got. Set α = 0.4, β = 0.5, q(x) = σΛ1(0.5w1+0.2w2+0.1w3+0.05w4), f1(t) = γ1,where γ1, σ are undetermined parameters, fixed any sample ω of one dimensional two-sided real-valued standard Wiener process. Thus, solution of model equations can beobtained numerically by stochastic Runge-Kutta method[51]. The dynamics of theEuler-Bernoulli beam is signified by the motion of the position x = 2.2.
Case I: let σ = 0, γ1 = 0.5, the system (4) is a autonomous system. The globalbasic attractors, global point attractors and global attractor are coincident, which isshown by Figure 2. Moreover, Figure 2 indicates that the system possesses an invariantmeasure denoted by δ0 is global stability.
Case II: set σ = 0, γ1 = 1, the system still an autonomous system. By the globalbasic attractor (see Figure 3a) , we have there exist two local stability invariant mea-sures for system (4), marked by δ−x1
and δx1. In addition, merging with the numerical
results expressed by Figure 3b, we have the system owns another invariant measureδ0 that is not stability. The Figure 3c shows the global attractor for system (4), whichcan give litter messages on the global dynamics of the considered system. Therefore,Unless necessary, the figure for global attractor is not given any more in the followingcircumstances.
Case III: when σ = 0.2, γ1 = 1, the system (4) is a stochastic system. The sec-
10

−0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.04−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
u
u
δ0
Figure 2. Invariant measure and global attractor in Case I
−0.1 −0.05 0 0.05 0.1 0.15−0.1
−0.05
0
0.05
0.1
u
u
δx
1
δ−x
1
(a) Invariant measures and global basicattractor.
−0.1 −0.05 0 0.05 0.1 0.15−0.1
−0.05
0
0.05
0.1
u
u
δ−x
1
δx
1δ
0
(b) Invariant measures and globalpoint attractor
−0.1 −0.05 0 0.05 0.1 0.15−0.1
−0.05
0
0.05
0.1
u
u
(c) Invariant measures and global pointattractor
Figure 3. Invariant measures and attractor in Case II.
tion of global random basic attractor (see Figure 4a) indicates the system possesses aglobal stable invariant measure δ0(ω) which is a invariant Markov measure actually.In addition, global random basic attractor, global random basic attractor and globalrandom basic attractor for the system are the same, which is a random fixed pointshown in Figure 4b.
Case IV: let σ = 0.2, γ1 = 1.4, the section of global random basic attractor de-scribed by Figure 5 demonstrates the existence of two local stability invariant Markovmeasures for the Euler-Bernoulli beam driven by additive white noise, denoted byδ−x1(ω) δx1(ω). Moreover, the global basic attractors and global point attractors arecoincident in this situation.
Case V: let σ = 1, γ1 = 1, by numerical results about the global random basic at-tractor illustrated by Figure 6, the system possesses a global stable invariant Markov
−0.5 −0.4 −0.3 −0.2 −0.1 00
0.01
0.02
0.03
0.04
0.05
0.06
u
u
δ0(ω)
(a) Invariant measure and section of
global random attractor.
−0.3 −0.2 −0.1 0 0.1−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
u
u
(b) Global random attractor
Figure 4. Invariant measure and global random attractor in Case III.
11

−1 −0.5 0 0.5 10.046
0.0465
0.047
0.0475
0.048
0.0485
0.049
0.0495
0.05
u
u
δ−x
1(ω)
δx
1(ω)
(a) Invariant measures and section of
global random basic attractor.
−1 −0.5 0 0.5 1−0.1
−0.05
0
0.05
0.1
0.15
u
u
−0.85−0.8−0.05
0
0.05
0.7 0.75 0.8−0.05
0
0.05
(b) Global random basic attractor
Figure 5. Invariant measures and attractors in Case IV.
−1 −0.98 −0.96 −0.94 −0.92 −0.9 −0.88 −0.86 −0.84 −0.82 −0.80.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.26
0.28
u
ut
(a) Invariant measures and section of
global random basic attractor.
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
u
ut
(b) global random basic attractor
Figure 6. Invariant measures and attractor in Case V.
measure δ0(ω) which is supported by a random fixed point. Furthermore, the globalbasic attractors and global point attractors and global attractor are with the sameform in this state.
In light of the aforementioned numerical results, some statements can be derived.Fixed σ = 0, let the value of γ1 change from 0.5 to 1, the global bifurcation occursin motion of the autonomous Euler-Bernoulli beam. Subsequently, frozen the value ofγ1, let σ = 0.2, then the phenomenon of global bifurcation disappears, the stationarymotion of system can be described by a random fixed point. When the value of γ1 goesfrom 1 to 1.4, there exists global D-bifurcation [8] in the motion of Euler-Bernoullibeam. Fixed γ1 = 1, let value of σ goes from 0.2 to 1, the global random attractor ofthe Euler-Bernoulli beam only comprises one random fixed point which means thatthe global D-bifurcation in motion of the Euler-Bernoulli beam is eliminated.
3. Preliminaries results and main Lemmas
This section is intended to provided some preliminaries and derived certain estimatesfor solution of system (12), which play prominent role in proving Theorem 2.5 andTheorem 2.6.
The Next proposition pertinent to z(θtω) is due to Ref [16].
Proposition 3.1. z(θtω) defined by (8) satisfies
E[z(θtω)] = 0, D[z(θtω)] =1
2µ.
12

and z(θtω) is a stationary Gauss Process and Markov Process, its probability-distribution function induce a Markov semigroup. Furthermore
limt→±∞
1
t
∫ t
0|z(θτω)|2dτ = E[|z(ω)|2] =
1
2µ, (32)
limt→±∞
1
t
∫ t
0|z(θτω)|dτ = E[|z(ω)|] =
1√πµ
, (33)
and
limt→±∞
z(θtω)
t= 0.
The sets z(ω) is tempered with respect to θtt∈R. Moreover If µ ≥ 2β, β > 0, then
E(eβ∫ s+ts|z(θτω)|2dτ
)≤ e
βt
µ , ∀s ∈ R, t ≥ 0. (34)
When µ3 ≥ r2, r ≥ 0, the following holds
E(er∫ s+ts|z(θτω)|dτ
)≤ e
rt√µ , ∀s ∈ R, t ≥ 0. (35)
Moreover
E (|z(θsω)|r) =Γ( r+1
2 )√πµr
, r ∈ R+. (36)
Where Γ(·) is usual Γ function.
The following theorem dedicated to verify the existence of random attractors forsystem (12) directly can be derived from Proposition 3.6 and Theorem 3.11 in Craueland Flandoli [5].
Theorem 3.2. Suppose S(t, ω) is a RDS on connected Polish space (X, d), and Sup-pose that φ possesses an absorbing set in X and for any nonrandom bounded setB ⊂ X, lim
t→+∞S(t, θ−tω)B is relative compact P-a.s.. Then φ possesses uniqueness
global random attractors defined by the following
A(ω) =⋃B⊂X
ΛB(ω)
where union is taken over all bounded B ⊂ X ,and ΛB(ω) given by
ΛB(ω) =⋂s≥0
⋃t≥s
φ(t, θ−tω)B
Furthermore, A (ω) is measurable with respect to F and connected.P− a.s..
Instead of splitting method, the stochastic version of approach proposed byChueshov and Lasiecka [2], which is depended on the stabilization estimation of the
13

system (12), is utilized to verify the condition that ”for any nonrandom bounded setB ⊂ X, lim
t→+∞S(t, θ−tω)B is relative compact P-a.s..” in Theorem (3.2).
The following Propositions of Kuratowski’s α-measure of non-compactness is veryimportant to attained the stabilization estimation of the system (12).
Proposition 3.3. [2] Suppose B ⊂ X is any bounded set, let
α(B) = inf d : B has a finite cover of diameter < d (37)
then α(B) is known as the Kuratowski’s α-measure of non-compactness of B, in short,α− measure of B, which have the following properties.
(i) α(B) = 0 if and only if B is precompact.(ii) α(A ∪B) ≤ max α(A), α(B).(iii) α(A+B) ≤ α(A) + α(B).(iv) α(coB) = α(B), where α(coB) is the closed convex hull of B.(v) If B1 ⊃ B2 ⊃ B3 ⊃ · · · are nonempty closed sets in X such that α(Bn)→ 0 as
n→∞, then ∩n≥1Bn is nonempty and compact.
We turn to derive some estimates of the solution of system (12). With respect tothe operator A in (12), we can obtain the next two Lemmas which are frequently usedin the rest paper.
Lemma 3.4. For any given U = [U1, U2]T ∈ E1, the following holds
(AU,U)E1≤ −ε
2‖Φ‖2E1
− (Λ
1
2
1α
2− ε
2)‖U2‖2 −
α
4‖A
1
4U2‖2, (38)
here ε satisfies (17).
Proof. Since
(−εU1 + U2, U1)2,l +(−AU1 + ε(αA
1
2 − ε)U1, U2
)− ((αA
1
2 − ε)U2, U2)
= −ε‖U1‖22,l + (U2, U1)2,l − (A1
2U1, A1
2U2) + εα(A1
2U1, U2)
−ε2(U1, U2)− α(A1
2U2, U2) + ε‖U2‖2
≤ −ε‖U1‖22,l + ε‖U2‖2 + εα‖A1
2U1‖‖U2‖ − ε2‖U1‖‖U2‖ − α‖A1
4U2‖2
≤ −3ε
4‖U1‖22,l + ε‖U2‖2 + εα2‖U2‖2 − ε2‖U1‖‖U2‖ − α‖A
1
4U2‖2
≤ −ε2‖U1‖22,l + ε‖U2‖2 +
ε3
Λ1‖U2‖2 + εα2‖U2‖2 − α‖A
1
4U2‖2.
= −ε2‖U‖2E1
− (Λ
1
2
1α
2− ε
2)‖U2‖2 +
(ε+
ε3
Λ1+ εα2 − αΛ
1
2
1
4
)‖U2‖2 −
α
4‖A
1
4U2‖2.
along with (17), we have (ε+
ε3
Λ1+ εα2 − αΛ
1
2
1
4
)≤ 0. (39)
14

Then, (38) holds.
Lemma 3.5.
−A ∈ L (E2, E1), (−A)−1 ∈ L (E1, E1), (40)
and the eigenvalues of A are as follows.
λ(+)k =
−αΛ1
2
k +√α2Λk − 4Λk2
, λ(−)k =
−αΛ1
2
k −√α2Λk − 4Λk2
,
k = 1, · · · , n, · · · . (41)
Proof. Similar to the proof of Lemma 7 in [46], the Lemma can be validated.
Let M > 0, τ ∈ R are given constant, for ∀T > 0, by the definition of z(θtω), wehave z(θtω) is continuous in [τ, τ+T ]. then, for ∀U,V ∈ E1, ‖U‖E1
≤M, ‖V‖E1≤M ,
there exists a positive constant C1(T, τ, ω,M) such that
‖N(t, U1)−N(t, V1)‖
=
∥∥∥∥(β ∥∥∥A 1
4U1
∥∥∥2− f1(t)
)(A
1
2U1 −A1
2V1
)+
(β∥∥∥A 1
4U1
∥∥∥2− β
∥∥∥A 1
4V1
∥∥∥2)A
1
2V1
∥∥∥∥≤
∣∣∣∣β ∥∥∥A 1
4U1
∥∥∥2− f1(t)
∣∣∣∣ ∥∥∥A 1
2U1 −A1
2V1
∥∥∥+β(∥∥∥A 1
4U1
∥∥∥+ β∥∥∥A 1
4V1
∥∥∥)∥∥∥A 1
2V1
∥∥∥×∥∥∥A 1
2U1 −A1
2V1
∥∥∥≤ C(T, τ,M)‖U−V‖E1
. (42)
Therefore, there exists a positive constant C2(T, τ, ω,M) satisfies
‖F3(U)− F3(V)‖E1≤ C2(T, τ, ω,M)‖U−V‖E1
, (43)
which expounds F3(U) : E1 → E1 satisfies Lipschtiz condition.Driving the absorbing set for system (12) needs the following estimates.
2(σA
1
2 q(x)z(θtω), A1
2u)≤ ε
2‖A
1
2u‖+2σ2|z(θtω)|2
ε‖A
1
2 q(x)‖2, (44)
2(σ(µ− αA
1
2 + ε)q(x)z(θtω), v)
≤ ε
2‖v‖2 + 4|z(θtω)|2
(σ2(µ+ ε)2
ε‖q(x)‖2 +
(σα)2
ε‖A
1
2 q(x)‖2)
(45)
15

and
2
(−[β∥∥∥A 1
4u∥∥∥2− f2
]A
1
2u, v
)≤ − 1
2β
d
dt
[β∥∥∥A 1
4u∥∥∥2− f2
]2
− ε
4β
[β∥∥∥A 1
4u∥∥∥2− f2
]2
+4εf2
2
7β+ 2
([β∥∥∥A 1
4u∥∥∥2− f2
]A
1
2u, σz(θtω)q(x)
)≤ − 1
2β
d
dt
[β∥∥∥A 1
4u∥∥∥2− f2
]2
− ε
4β
[β∥∥∥A 1
4u∥∥∥2− f1(t)
]2
+4εf2
2
7β
+√
2β|σz(θtω)|‖q(x)‖
(1
2β
[β[A
1
4u]2− f2
]2
+ ‖A1
2u‖2)
≤ − 1
2β
d
dt
[β∥∥∥A 1
4u∥∥∥2− f2
]2
− ε
4β
[β∥∥∥A 1
4u∥∥∥2− f1(t)
]2
+4εf2
2
7β
+√
2β|σz(θtω)|‖q(x)‖
(1
2β
[β[A
1
4u]2− f2
]2
+ ‖A1
2u‖2 + ‖v‖2). (46)
The next lemma shows S(t, ω) possesses global absorbing set in E1, moreover, theexpectation for radius of the absorbing set is finite.
Lemma 3.6. For any given deterministic bounded set B ⊂ E1, there exists TB(ω) ≥ 0such that
‖S(t, θ−tω)B‖E1≤ r(ω), ∀t ≥ TB(ω).
Furthermore,
E(r2(ω)) ≤Mmax,E(r2(1+b)(ω)) ≤M b,max. (47)
where r(ω), r(ω),Mmax,M b,max satisfy (23) and (26).
Proof. Taking the inner product of (16) by Φ = [u, v]T in E1, we get
d
dt‖Φ‖2E1
= 2(AΦ,Φ)E1+ 2
(σA
1
2 q(x)z(θtω), A1
2u)
2(σ(µ− αA
1
2 + ε)q(x)z(θtω), v)
+2
(−[β∥∥∥A 1
4u∥∥∥2− f2
]A
1
2u, v
). (48)
Let
E(t, τ, ω) = E(u, v) =
(1
2β
[β∥∥∥A 1
4u∥∥∥2− f2
]2
+ ‖A1
2u‖2 + ‖v‖2). (49)
16

Substituting(44),(45) and (46) into (48), along with Lemma 3.4, we have
d
dtE(u, v) ≤ −ε
2E(u, v) +
√2β|σz(θtω)|‖q(x)‖E(u, v) +
4εf22
7β+ |z(θtω)|2K. (50)
Multiplying both sides of (50) by E(u, v)b, b > 0, we find
d
dtE(u, v)1+b ≤ −ε(1 + b)
2E(u, v)1+b + (1 + b)
√2β|σz(θtω)|‖q(x)‖E(u, v)1+b
+(1 + b)4εf2
2
7βE(u, v)b + (1 + b)|z(θtω)|2KE(u, v)b.
≤ −ε(1 + b)
4E(u, v)1+b + (1 + b)
√2β|σz(θtω)|‖q(x)‖E(u, v)1+b
+1
(1 + b)mb0
((4εf2
2
7β
)1+b
+ (|z(θtω)|2K)1+b
). (51)
where m0,K are defined by (19) and (20) correspondingly.For ∀s0 ∈ [0, 1],∀t ∈ R−, by (49) and (50), it is found
E(s0, t, ω) ≤ e−ε
2(s0−t)+
∫ s0t
√2β|σz(θsω)|‖q(x)‖dsE(t, t, ω)
+4εf2
2
7β
∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dkds
+
∫ s0
te−ε(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds.
Since v = ut + εu− σq(x)z(θtω), we have(‖A
1
2u‖2 + ‖ut + εu‖2)
(s0, t, ω)
≤ e−ε
2(s0−t)+
∫ s0t
(√
2β|σz(θsω)|‖q(x)‖)ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds
+4εf2
2
7β
∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dkds
+e−ε
2(s0−t)+
∫ s0t
√2β|σz(θsω)|‖q(x)‖dsσ2‖q(x)‖2|z(θtω)|2
+σ2‖q(x)‖2|z(θs0ω)|2. (52)
17

Similarly, invoking (51), we have
E(s0, t, ω)1+b
≤ e−ε(1+b)
4(s0−t)+
∫ s0t
(1+b)√
2β|σz(θsω)|‖q(x)‖dsE(t, t, ω)1+b
+1
(1 + r)mr0
[(4εf2
2
7β
)1+b ∫ s0
te−
ε(1+b)
4(s0−s)+
∫ s0s
(1+b)√
2β|σz(θkω)|‖q(x)‖dkds
+
∫ s0
te−
ε(1+b)
4(s0−s)+
∫ s0s
(1+b)√
2β|σz(θkω)|‖q(x)‖dk(|z(θsω)|2K)1+bds
]+e−
ε(1+b)
4(s0−t)+
∫ s0t
(1+b)√
2β|σz(θsω)|‖q(x)‖ds(σ2‖q(x)‖2|z(θtω)|2)1+b
+(σ2‖q(x)‖2|z(θs0ω)|2)1+b. (53)
the second term of left part of (52) can be rewritten as∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds
= e−ε
2s0
∫ s0
te∫ s00
√2β|σz(θkω)|‖q(x)‖dke
ε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dk|z(θsω)|2Kds.
Since s0 ∈ [0, 1], we have there exists a constant ε ≥ 0 independent of β, ‖q‖ such that∫ s0
0
√2β|σz(θkω)|‖q(x)‖ds ≤ ε.
when s0 = 0, then ε = 0. Thus, we have∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds
≤ eεe−ε
2s0
∫ s0
teε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dk|z(θsω)|2Kds
Similarly, we get
e−ε
2(s0−t)+
∫ s0t
(√
2β|σz(θsω)|‖q(x)‖)ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)
≤ εe−ε
2s0e
ε
2t+∫ 0
t(√
2β|σz(θsω)|‖q(x)‖)ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)
4εf22
7β
∫ s0
te−
ε
2(s0−s)+
∫ s0s
(√
2β|σz(θkω)|‖q(x)‖)dkds
≤ εe−ε
2s0
4εf22
7β
∫ s0
teε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dkds
e−ε
2(s0−t)+
∫ s0t
(√
2β|σz(θsω)|‖q(x)‖)dsσ2‖q(x)‖2|z(θtω)|2
≤ εe−ε
2s0e
ε
2t+∫ 0
t(√
2β|σz(θsω)|‖q(x)‖)dsσ2‖q(x)‖2|z(θtω)|2
On the other hand, we obtain there exists a constant ε1 ≥ 0 independent of β, ‖q‖
18

such that
e−ε(1+b)
4(s0−t)+
∫ s0t
(1+b)√
2β|σz(θsω)|‖q(x)‖ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)1+b
≤ ε1e− ε(1+b)
4s0e
ε(1+b)
4t+∫ 0
t(√
2β|σz(θsω)|‖q(x)‖)ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)1+b(4εf2
2
7β
)1+b ∫ s0
te−
(1+b)ε
4(s0−s)+
∫ s0s
(1+b)√
2β|σz(θkω)|‖q(x)‖dkds
≤ εe−(1+b)ε
4s0
(4εf2
2
7β
)1+b ∫ s0
te
(1+b)ε
4s+∫ 0
s(1+b)
√2β|σz(θkω)|‖q(x)‖dkds
e−ε(1+b)
4(s0−s)+
∫ s0t
(1+b)√
2β|σz(θsω)|‖q(x)‖ds(σ2‖q(x)‖2|z(θtω)|2)1+b
≤ εe−ε(1+b)
4s0e
(1+b)ε
4t+∫ 0
t(1+b)
√2β|σz(θsω)|‖q(x)‖ds(σ2‖q(x)‖2|z(θtω)|2)1+b
In term of (32), we have there exists T 1 < 0 such that
−1
t
∫ t
0
√2β|σz(θsω)|‖q(x)‖ds ≥ −2
√2β|σ|‖q(x)‖√πµ
, ∀t < T 1,
which along with (19) implies ε ≡ ε2 −
2√
2β|σ||‖q(x)‖√πµ > 0, then
(ε
2− 1
t
∫ t
0
√2β|σz(θsω)|‖q(x)‖ds
)t ≤ εt, ∀t < T1. (54)
Since the random variable z(ω) is tempered, we get
εe−ε
2s0e
ε
2t+∫ 0
t(√
2β|σz(θsω)|‖q(x)‖)ds(‖A
1
2u‖2 + ‖ut + εu‖2)
(t, t, ω)→ 0, t→ −∞, (55)
and
εe−ε
2s0e
ε
2t+∫ 0
t(√
2β|σz(θsω)|‖q(x)‖)dsσ2‖q(x)‖2|z(θtω)|2 → 0, t→ −∞. (56)
According to (54), we have
εe−ε
2s0
∫ s0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds
≤ εe−ε
2s0
∫ s0
T 1
eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds
+εe−ε
2s0
∫ T 1
−∞eεs|z(θsω)|2Kds.
Since z(ω) is tempered, we find εe−ε
2s0∫ T 1
−∞ eεs|z(θsω)|2Kds is bounded.
19

On the other hand, we can obtain
εe−ε
2s0
4εf22
7β
∫ 0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dkds
≤ εe−ε
2s0
4εf22
7β
∫ s0
T 1
eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dkds+ εe−ε
2s0eεT 1
4εf22
7εβ.
hence, ρ(s0, ω) defined by (21) is a bounded (P-a.s.). Similarly, we can get ρ(s0, ω)satisfies (22) is bounded (P-a.s.).
Employing (35) and Cauchy inequality, we have
E(eε
2s+∫ 0
s
√2β|σz(θkω)|‖q(x)‖dk|z(θsω)|2K
)≤ Ke
ε
2s−√
2β|σ|‖q(x)‖s√µ
(Γ(5
2)
µ2√π
) 1
2
,
which combine with (36) gives
E(εe−
ε
2s0
∫ s0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds)
≤ εe−ε
2s0K
( Γ(52)
µ2√π
) 1
2 ∫ s0
T 1
eε
2s−√
2β|σ|‖q(x)‖s√µ ds+
1
2µ
∫ T 1
−∞eεsds
≤ εe−
ε
2s0K
( Γ(52)
µ2√π
) 1
2 ∫ s0
T 1
eε
2s−√
2β|σ|‖q(x)‖s√µ ds+
1
2εµeεT 1
. (57)
Since 0 ≤ M0(s0) < ∞, ∀s0 ∈ [0, 1], here M0(S0) is defined by (27), together with(57), we have
E(εe−
ε
2s0
∫ 0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dk|z(θsω)|2Kds)≤M0(s0). (58)
Analogously, we have
E(εe−
ε
2s0
4εf22
7β
∫ 0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dkds
)≤ εe−
ε
2s0
4εf22
7β
∫ 0
T 1
eε
2s−√
2β|σ|‖q(x)‖s√µ ds+ εe−
ε
2s0eεT 1
4εf22
7εβ. (59)
Since 0 ≤ M1(s0) < ∞, ∀s0 ∈ [0, 1], where M1(s0) satisfies (28), along with (59), weget
E(εe−
ε
2s0eεT1
4εf22
7β
∫ 0
−∞eε
2s+∫ 0
s(√
2β|σz(θkω)|‖q(x)‖)dkds
)≤M1(s0). (60)
20

By (32), we have
E(σ2‖q(x)‖2|z(θs0
ω)|2)
=σ2‖q(x)‖2
2µ<∞. (61)
Taking the expectation of both sides of (21), together with (24), (58), (60) and (61),we find
E(ρ(s0, ω)) ≤ M(s0), s0 ∈ [0, 1]. (62)
Similarly, we can also obtain
E(ρ(s0, ω)) ≤ M(s0), s0 ∈ [0, 1]. (63)
By (55), (56) and (21), we catch that there exists TB(ω) < 0 such that for ∀t ≤TB(ω) (
‖A1
2u‖2 + ‖ut + εu‖2)
(s0, t, ω) ≤ ρ(s0, ω).
Since (‖A
1
2u‖2 + ‖ut + εu‖2)
(s0, t, ω) =(‖A
1
2u‖2 + ‖ut + εu‖2)
(s0 − t, θtω).
let t = −t, TB(ω) = −TB(ω), we can conclude that for any given bounded set B ⊂ E1,there exists TB(ω) > 0 such that (P-a.s.)
‖S(s0 + t, θ−tω)B‖E1≤ r(s0, ω), ∀t > TB(ω), ∀s0 ∈ [0, 1]. (64)
Especially, when s0 = 0,
‖S(t, θ−tω)B‖E1≤ r(ω). (65)
where r(s0, ω), r(ω) satisfy (23). On the other hand, by (62) and (63), we find (47)holds.
Following the treatment in Khanmamedov [52], we can drive the next two Lemmaswhich are utilized to get the stabilization estimate of system (12).
Lemma 3.7. Suppose u ∈ L∞((τ, t), H2l (D)), ut ∈ L∞((τ, t), L2(D)). Then∫ t
τ
([β ‖∇u‖2 − f2
]((−∆)u, ut)
)(s)ds
=
(β
4‖∇u‖4 − f2
2‖∇u‖2
)(t)−
(β
4‖∇u‖4 − f2
2‖∇u‖2
)(τ) (66)
Proof. Since
u ∈ L∞((τ, t), H2l (D), ut ∈ L∞((τ, t), L2(D)),
21

by Theorem 1.1.8 in Ref [2], we have
u ∈ Lp([τ, t],D(As)), 1 ≤ p < +∞, 0 ≤ s < 1
2,
furthermore, u ∈ C([τ, t],D(A1
4 )). Applying the Lemma 8.1 in Ref [53], we obtain
u ∈ Cs([τ, t];D(A1
2 )). Suppose sn, s ∈ [τ, t], sn → s, then u(sn) → u(s) weakly inH2l (D). According to the compact embedding theorem, we derive
u(sn)→ u(s), n→ +∞, strongly in D(A1
4 ).
then β ‖∇un‖2 − f2 ∈ C([τ, t]).Since C∞([0, T ] × D) is dense in Lp([τ, t], H2
l (D)), 1 ≤ p < ∞, let un∞n=1 ∈C∞([0, T ]×D) such that
un → u, n→∞, strongly in Lp([τ, t], H2l (D)),
unt → ut, n→∞, strongly in Lp([τ, t], L2(D)).
Thus
β ‖∇un‖2 − f2 → β ‖∇u‖2 − f2, n→∞, strongly in L2([τ, t]),
and([β ‖∇un‖2 − f2
](−∆)un, unt
)→([β ‖∇u‖2 − f2
](−∆)u, ut
), n→∞,
strongly in L1([τ, t]). (67)
On the other hand, since un∞n=1 ∈ C∞([τ, t]×D), along with the properties of A,we have ∫ t
τ
[β ‖∇un‖2 − f2
]((−∆)un, unt ) ds
=
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(t)−
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(τ). (68)
By (67), we catch(β
4‖∇un‖4 − f2
2‖∇un‖2
)(t)→
(β
4‖∇u‖4 − f2‖∇u‖2
)(t), n→∞, (69)(
β
4‖∇un‖4 − f2
2‖∇un‖2
)(τ)→
(β
4‖∇u‖4 − f2‖∇u‖2
)(τ), n→∞. (70)
Let n→∞ in both sides of (68), incorporate with (67), we find∫ t
τ
[β ‖∇un‖2 − f1
]((−∆)un, unt ) ds→
∫ t
τ
[β ‖∇u‖2 − f1
]((−∆)u, ut) ds, (71)
22

together with (69) and (70), we have
the right of equal in (68) →(β
4‖∇u‖4 − f1
2‖∇u‖2
)(t)
−(β
4‖∇u‖4 − f1
2‖∇u‖2
)(τ) (72)
Taking advantage of (71) and (72), we can conclude (66) holds.
Lemma 3.8. Suppose un+∞n=1 is weakly star convergent to u in L∞((τ, t), H2l (D) and
unt +∞n=1 is weakly star convergent to ut in L∞((τ, t), L2(D), let n,m ∈ N. Then
limn→∞
limm→∞
∫ t
τ
([β ‖∇un‖2 − f2
](−∆)un −
[β ‖∇um‖2 − f2
](−∆)um,
unt − umt ) (s)ds = 0, (73)
limn→∞
limm→∞
∫ t
τ
([β ‖∇un‖2 − f2
](−∆)un −
[β ‖∇um‖2 − f2
](−∆)um,
un − um) (s)ds = 0. (74)
Proof. Since un+∞n=1 is weakly star convergent to u in L∞((τ, t), H2l (D)) and unt +∞n=1
is weakly star convergent to ut in L∞((τ, t), L2(D)), therefore, un∞n=1 is weakly
convergent in C([τ, t],D(A1
4 )), which together with Lemma 8.1 in Ref [53] gives un ∈Cs([τ, t], H
2l (D)). For any s ∈ [τ, t], similar to the argument of Lemma 3 in Ref [52],
we have
un(s)→ u(s), n→∞,weakly in D(A1
2 ).
Moreover, by the compact embedding theorem, we obtain
un(s)→ u(s), n→∞, strongly in D(A1
4 ). (75)
On the other hand, let 1 ≤ p < +∞, by the Theorem 1.1.8 in Ref [2], we attain
un → u, n→∞, Strongly in Lp([τ, t],D(As)), 0 ≤ s < 1
2. (76)
Therefore
‖∇un‖ → ‖∇u‖, n→∞, strongly in Lp([τ, t]), (77)
and (β ‖∇un‖2 − f2
)→(β ‖∇u‖2 − f2
), n→∞, strongly in L1[τ, t].
23

In addition, for any given φ ∈ L1(τ, t;L2(D)), we have∫ t
τ
∫D
[(β ‖∇un‖2 − f2
)−(β ‖∇u‖2 − f2
)]φdxds
≤∫ t
τ
∣∣∣β ‖∇un‖2 − β ‖∇u‖∣∣∣ ‖φ‖ds.along with (77), we find that(β ‖∇un‖2 − f2
)φ→
(β ‖∇un‖2 − f2
)φ, n→∞, strongly in L1(τ, t;L2(D)).
Since
un → u weakly star in L∞([τ, t], H2l (D)),
we have
limn→∞
∫ t
τ
(β ‖∇un‖2 − f2
)(φ, (−∆)un) ds =
∫ t
τ
(β ‖∇u‖2 − f2
)(φ, (−∆)u) ds. (78)
The arbitrary of φ ∈ L1(τ, t;L2(D)), which together with (78) implies(β ‖∇un‖2 − f2
)(−∆)un →
(β ‖∇u‖2 − f2
)(−∆)u,
n→∞,weakly star in L∞([τ, t);L2(D)). (79)
Since
unt → ut weakly star in L∞([τ, t], H2l (D)),
combing with (79), we get
limm→∞
limn→∞
∫ t
τ
[β ‖∇un‖2 − f2
]((−∆)un, umt ) ds
=
∫ t
τ
[β ‖∇u‖2 − f2
]((−∆)u, ut) ds. (80)
On the other hand,([β ‖∇un‖2 − f2
]A
1
2un −[β ‖∇um‖2 − f2
](−∆)um, unt − umt
)=
[β ‖∇un‖2 − f2
]((−∆)un, unt )−
[β ‖∇un‖2 − f2
]((−∆)un, umt )
−[β ‖∇um‖2 − f2
]((−∆)um, unt ) +
[β ‖∇um‖2 − f2
]((−∆)um, umt ) (81)
24

By Lemma 3.7, we have∫ t
τ
[β ‖∇un‖2 − f2
]((−∆)un, unt ) ds
=
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(t)−
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(τ), (82)
which merge with (81) gives∫ t
τ
([β ‖∇un‖2 − f2
](−∆)un −
[β ‖∇um‖2 − f2
](−∆)um, unt − umt
)ds
=
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(t)−
(β
4‖∇un‖4 − f2
2‖∇un‖2
)(τ)
+
(β
4‖∇um‖4 − f2
2‖∇um‖2
)(t)−
(β
4‖∇um‖4 − f2
2‖∇um‖2
)(τ)
−[β ‖∇un‖2 − f2
]((−∆)un, umt )−
[β ‖∇um‖2 − f2
]((−∆)um, unt ) . (83)
Combining with (75), (80) and (83), we obtain
limn→∞
limm→∞
∫ t
τ
([β ‖∇un‖2 − f2
](−∆)un
−[β ‖∇um‖2 − f2
](−∆)um, unt − umt
)ds
=
(β
2‖∇u‖4 − f2‖∇u‖2
)(t)−
(β
2‖∇u‖4 − f2‖∇u‖2
)(τ)
−2
∫ t
τ
[β ‖∇u‖2 − f2
]((−∆)u, ut) . (84)
By Lemma 3.7 with (84), we find the (73) holds. Similarly, it can be verified that (74)holds.
Lemma 3.6 reveals that for any nonrandom bounded set B ⊂ E1, there existsTB(ω) > 0 such that for ∀T1 ≥ TB(ω),
S(T1, θ−T1ω)B ⊆ K(ω).
where K(ω) = B(0, r(ω)). Employing this fact, we accomplish the next Lemma whichis so-called stabilization estimation in Control theory. This Lemma is to derive theasymptotical compactness of S(t, ω).
Lemma 3.9. For any nonrandom bounded B ⊂ E1, suppose U(0)n +∞n=1 ∈ B is any
bounded sequences, T0 ∈ [0,∞)is arbitrary given, n,m ∈ N. Then, for ∀ε > 0, thereexists TB(ω, ε) ≥ TB(ω), let T = max TB(ω, ε), T0, such that
‖S(T, θ−Tω)U(0)m − S(T, θ−Tω)U(0)
n ‖E1≤ ε+Kε,B,T,ω(U(0)
m ,U(0)n ), (85)
25

and
lim infn→+∞
lim infm→+∞
Kε,B,T,ω(U(0)m ,U(0)
n ) = 0.
Proof. For ∀t ≥ 0, let
Un+∞n=1 = [un, vn]T +∞n=1 = φ(τ,−t, ω)U(0)n +∞n=1, ∀τ ∈ [−t, 0],
By Lemma 3.6, there exists subsequence of Un+∞n=1 which is weakly star convergencein L∞([−t, 0], E1), still denoted by Un+∞n=1.
Taking the inner product of (13) by Un − Um in E1, which along with (38) andv = ut + εu attain
d
dt‖Un −Um‖2E1
≤ −ε‖Un −Um‖2E1+ 2K(Um,Un),
where
K(Um,Un)(s)
=([β ‖∇un‖2 − f2
](−∆)un −
[β ‖∇um‖2 − f2
](−∆)um, unt − umt
)+
([β ‖∇un‖2 − f2
](−∆)un −
[β ‖∇um‖2 − f2
](−∆)um, ε(un − um)
)(86)
Since φ(0,−t, ω) = S(t, θ−tω), ∀t ∈ R+, ω ∈ Ω, then
‖Un −Um‖2E1(t, θ−tω) ≤ e−εt‖U(0)
n −U(0)m ‖2E1
+ 2
∫ 0
−teεsK(Um,Un)(s)ds.
Taking into account U(0)n ,U
(0)m ∈ B, thus e−εt‖U(0)
n −U(0)m ‖2E1
→ 0, (t→∞). Let
TB(ε) = max
−1
εlog
(ε
2‖B‖2E1
), TB(ω)
.
for ∀ε > 0, there exists
T = max TB(ε), T0 ,
such that
‖Un −Um‖2E1(T, θ−Tω) ≤ ε+ 2
∫ 0
−TeεsK(Um,Un)(s)ds.
Let
Kε,B,T,ω(U(0)m ,U(0)
n ) = 2
∫ 0
−TeεsK(Um,Un)(s)ds,
26

Since eεs ∈ L∞([−T, 0]), Combing with (86), Lemma 3.6 and Lemma 3.8, we obtain
lim infn→+∞
lim infm→+∞
Kε,B,T,ω(U(0)m ,U(0)
n ) = 0,
Since F2(U), F12(ω,U) is independent to v, when no ambiguity is possible, indicated
by F2(u), F12(ω, u). In order to estimate the Hausdorff dimension of the global randomattractors for system (12), the first step is to verify the uniformly quasidifferentiableof S(t, ω), which will use the next Lemma.
Lemma 3.10. For ∀u1, u2 ∈ D(A1
2 ), ‖u1‖D(A12 )≤ r(ω), ‖u2‖D(A
12 )≤ r(ω), where r(ω)
is introduced in Theorem 2.5. Then, there exist constants
c1(ω) = max
1,
2βr(ω)(1 + Λ1
4
1 )
Λ1
2
1
(87)
and
c2(ω) = max
1,
2βr(ω)(1 + Λ1
2
1 )
Λ1
2
1
(88)
such that
‖F2(u1)− F2(u2)‖L (D(A
12 ),L2(D))
≤ c1(ω)‖A1
2u1 −A1
2u2‖, (89)
‖F2(u1)‖L (D(A
12 ),L2(D))
≤ c2(ω). (90)
Furthermore, E(c1(ω)) <∞,E(c2(ω)) <∞.
Proof. For ∀% ∈ D(A1
2 ), we find
‖(F2(u1)− F2(u2)
)%‖
≤ β (‖∇u1‖ − ‖∇u2‖) (‖∇u1‖+ ‖∇u2‖) ‖(−∆)%‖+2β |(∇u1,∇%)| ‖(−∆)u1 − (−∆)u2‖+ 2β |(∇u1 −∇u2,∇%)| ‖(−∆)u2‖
≤ β (‖∇u1‖ − ‖∇u2‖) (‖∇u1‖+ ‖∇u2‖) ‖(−∆)%‖+2β‖∇u1‖‖∇%‖‖(−∆)u1 − (−∆)u2‖+ 2β‖∇u1 −∇u2‖‖∇%‖‖(−∆)u2‖
Since ∀u1,∀u2 ∈ D(A1
2 ), ‖u1‖D(A12 )≤ r(ω), ‖u2‖D(A
12 )≤ r(ω), merging with (87), we
have
‖(F2(u1)− F2(u2)
)%‖ ≤ c1(ω)‖∆u1 −∆u2‖‖∆%‖
Hence
‖(F2(u1)− F2(u2)
)‖
L (D(A12 ),H)
≤ c1(ω)‖A1
2u1 −A1
2u2‖
27

On the other hand, since
‖F2(u)‖ ≤∣∣β‖∇u‖2 − f1(t)
∣∣ ‖∆%‖+ 2β‖∇u‖‖∇%‖∆u‖
according to Theorem 2.5, we get∣∣∣β‖A 1
4u‖2 − f1(t)∣∣∣ ≤ r,
which together with (88) give
‖F2(u)‖L (D(A
12 ),H)
≤ c2(ω).
Then, (90) is satisfied. Moreover, according to the Theorem 2.5, E(c1(ω)) <∞,E(c2(ω)) <∞ can be derived obviously.
Let S(ω) := S(t, ω), the uniformly qusidifferentiable of S(ω) can be accomplishedin the following manner.
Suppose U(1) = [u1, v1],U(2) = [u2, v2] are the solution of SEBT2 with initial values
U(1)0 ∈ K (τ),U
(2)0 ∈ K (τ), where U
(2)0 = U
(1)0 +h, h = [h1, h2] ∈ E1, then U(1)−U(2)
satisfies (13). Let U = [U1, U2] be the solution of system (14) in which U = U(1) with
initial value t = 0 : U0 = h. In addition, set Ψ = [Ψ1,Ψ2]T = U(1) −U(2) − U.We take the inner product of (13) by U(1) −U(2) in E1. This gives
1
2
d‖U(1) −U(2)‖2E1
dt=
(A(U(1) −U(2)),U(1) −U(2)
)E1
+ (F12(ω, u1)− F12(ω, u2), v1 − v2) . (91)
Since
F12(ω, u1)− F12(ω, u2) =
∫ 1
0F12(su1 + (1− s)u2)(t)(u1 − u2)(t)ds,
merging with (90) in Lemma 3.10, we have
‖F12(ω, u1)− F12(ω, u2)‖ ≤ c2‖A1
2 (u1 − u2)‖.
Furthermore, by Cauchy inequality and Young inequality, we obtain
(F12(ω, u1)− F12(ω, u2), v1 − v2) ≤ c2(ω)(‖A
1
2 (u1 − u2)‖2 + ‖v1 − v2‖)
≤ c2(ω)‖U (1) − U (2)‖2E1. (92)
Substituting (92) into (91), together with (38) gives
d‖U(1) −U(2)‖2E1
dt≤ −ε‖U(1) −U(2)‖2E1
+ 2c2(ω)‖U(1) −U(2)‖2E1
≤ 2c2(ω)‖U(1) −U(2)‖2E1. (93)
28

When no ambiguity is possible, the value of U(1),U(2) at t = 1 are still denoted byU(1),U(2) accordingly, Hence
‖U(1) −U(2)‖2E1≤ e2c2(ω)‖h‖2E1
. (94)
Since U(1) ∈ A (ω), according to Theorem 2.5, we have ‖U(1)(θsω)‖E1≤ r(s, ω), s ∈
[0, 1]. On the other hand
(AU, U
)E1
≤ −ε2‖U‖2E1
− Λ1
2
1α− ε2
‖U2‖2 −α
4‖A
1
4 U2‖2 (95)
and(F(U(1))U, U
)E1
= −([β ‖∇u‖2 − f2
](−∆)U1 + 2β(∇u,∇U1)(−∆)u, U2
)≤ α
4‖A
1
4 U2‖2 +2βr2(ω)
α‖A
1
4 U1‖2
+2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)‖A
1
4 U1‖2 +Λ
1
2
1α− ε2
‖U2‖2 (96)
By (95) and (96), along with Lemma 3.4, we have
1
2
d‖U‖2E1
dt≤ 2βr2(ω)
α‖A
1
4 U1‖2 +2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)‖A
1
4 U1‖2
≤ p(ω)‖U‖2E1, (97)
where
p(ω) = max
1,
4βr2(ω)
α,
4β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)
.
Merging with Theorem 2.5, we find
p(ω) ≥ 1,E (p(ω)) <∞. (98)
Invoking (97), we obtain
‖U‖E1≤ ep(ω)‖h‖E1
. (99)
When no ambiguity is possible, the value of U at t = 1 is still denoted by U. Define
U(1) = DS(ω,U(1))h, then DS(ω,U(1)) is the linear solution mapping associatedwith system (14). Let C1(ω) = ep(ω), according to (98) and (95), we get
‖DS(ω,U(1))‖L (E1,E1) ≤ C1(ω), (100)
29

and
C1(ω) ≥ 1, E (ln(C1(ω))) <∞. (101)
On the other hand, Ψ satisfies
dΨ
dt= AΨ + F1(U(1))Ψ + l, (102)
the initial of Ψ is 0, here l = [0, l1],
l1 =
∫ 1
0
(F12(su2 + (1− s)u1)
−F12(u1))
(u1 − u2)ds.
It follows from Lemma 3.10 that there exists a constant c3 > 0 such that
‖l1‖ ≤ c1(ω)‖A1
2u1 −A1
2u2‖2. (103)
Taking the inner product of (102) by Ψ in E1, along with (38), we have
d‖Ψ‖2E1
dt≤ −ε‖Ψ‖2E1
+ 2(F1(U(1))Ψ,Ψ)
+2(l,Ψ)
= −ε‖Ψ‖2E1+ 2(F12(u1)Ψ2,Ψ2)
+2(l1,Ψ2). (104)
Invoking Lemma 3.10, we have
(F (U(1))Ψ,Ψ) ≤ c2(ω)‖Ψ‖2. (105)
By (103), it can be found
(l1,Ψ2) ≤ c1(ω)(‖A
1
2u1 −A1
2u2‖4 + ‖Ψ2‖2). (106)
Substituting (105) and (106) into (104), we attain
d‖Ψ‖2E1
dt≤ 2(c1(ω) + c2(ω))‖Ψ‖2E1
+ 2c1(ω)‖A1
2u1 −A1
2u2‖4,
taking into account the initial value t = 0 : Ψ = 0, we have
‖Ψ(1, ω)‖2E1≤ 2c1(ω)
∫ 1
0e2(c1(ω)+c2(ω))(1−s)‖A
1
2u1 −A1
2u2‖4(s)ds.
Since c1(ω) > 0, c2(ω) > 0, we find
‖Ψ(1, ω)‖2E1≤ 2c1(ω)e2(c1(ω)+c2(ω))
∫ 1
0‖A
1
2u1 −A1
2u2‖4(s)ds,
30

merging with (94), it can be derived that there exist a bounded random variablec3(ω) ≥ 1, c4(ω) ≥ 1 such that
‖Ψ(1, ω)‖E1≤ c4e
c3‖h‖2E1. (107)
where
c3(ω) = max1, 3c1(ω) + c2(ω), c4(ω) = max
1,
√c1(ω)
2c2(ω)
(108)
Combing (87) with (88), we have c1(ω) ≥ 1, c2(ω) ≥ 1 and E(c1(ω)) <∞,E(c2(ω)) <∞, therefore
E(c3(ω)) <∞,E(c4(ω)) <∞. (109)
Since S(ω) := S(1, ω), merging with (107) and (108), we can conclude that S(ω) isalmost surly uniform differentiable on A (ω).
4. Main proofs
In light of the Preliminaries results and main Lemmas proved in Section 3, this Sectionis committed to prove the main results given in subsection 2.2.
4.1. Proof of Theorem 2.4
Invoking (38), (40) and (41), it follows from the Lemma 2.2.3 in Ref [54] that Acan induce a linear semigroup of contractions formulated by eAt, t ∈ R+. Moreover,(43) shows that F3(U) : E1 → E1 satisfies Lipschtiz condition, together with z(θtω)is continuous in [τ, t] and Theorem 2.5.1 in Ref [54], we conclude that system (16)possesses uniqueness (mild) solution with the form
Φ(t, τ, ω; Φτ ) = eA(t−τ)Φτ +
∫ t
τeA(t−s) (F2(θsω) + F3(Φ)(s)) ds.
where,t ≥ τ, t, τ ∈ R.Let Φ(t, τ, ω; Φτ ) = ϕ(t, τ, ω)Φτ , following the argument in the Proof of Theorem
1 in [46], we can get
ϕ(t− τ, 0, θτω) = ϕ(t, τ, ω), ϕ(τ, τ, ω) = id.
Thus complete the proof.
4.2. Proof of Theorem 2.5
The Lemma 3.6 shows that the RDS S(t, ω) possesses global absorbing set in E1, more-over, by (24), we have the estimation of expectation of radius of the global absorbingset.
In light of Lemma 3.9, following the proof of Theorem 2 in [46], we can derive that
31

for any nonrandom bounded set B ⊂ X, limt→+∞
S(t, θ−tω)B is relative compact (P-a.s.),
where S(t, ω) is the RDS induced by system (12).As indicated above, according to the Theorem 3.2, it can be find that the S(t, ω)
possesses random attractors A (ω) ⊂ E1, ∀ω ∈ Ω defined by
A (ω) =⋃
B⊂E1
ΛB(ω).
where union is taken over all bounded B ⊂ X ,and ΛB(ω) given by
ΛB(ω) =⋂s≥0
⋃t≥s
φ(t, θ−tω)B.
4.3. Proof of Theorem 2.6
We follow the approach introduced by Theorem 2.4 in [10] to attain the Hausdorffdimensions estimation for random attractors.
Since S(ω) = S(1, ω), employing the (i) in Definition 2.3, we have S(ω)A (ω) =A(θω), then the condition (2.1) in Theorem 2.4 in [10] is satisfied. For any U ∈ A (ω),
the system (14) with initial t = 0 : U = U0 ∈ E1 possesses uniqueness solution U,the associated solution mapping denoted by DS(t, ω,U). Furthermore, let DS(ω,U) =DS(1, ω,U). By (107) and (108), we attain S(ω) is almost surely uniform differentiableon A (ω), which means the conditions (2.3), (2.4), (2.5) and (2.11) in Theorem 2.4 in[10] hold. According to (100) and (101), we can derive (2.8), (2.9) and (2.10) and (2.11)in Theorem 2.4 in [10] are satisfied.
The rest proof is devoted to estimate the Hausdorff dimension of A (ω) via (2.6)and (2.7). By the Chapter V in Temam [1], we have
$m(DS(ω,U)) = sup‖U(i)
0‖<1
i=1,··· ,m
exp
(∫ 1
0Tr(A + F(U)) Qm(s)ds
)(110)
Qm(s) = Qm(s, τ,Uτ ; U01, · · · , U0m)is the orthogonal projector in E1 onto the space
spanned by U1(t), · · · , Um(t). where U = Sw(t, τ)Uτ and U1, · · · , Um are the solution
of (14) with initial values U = U01, · · · , U0m respectively. For any given time s, letΦi(s) = ξi(s), ζi(τ), i = 1, · · · ,m denote an orthonormal basis of Qm(s)E1, then
Tr(A + F(U)) Qm(s) =
m∑i=1
((A + F(U))Φi(s),Φi(s)
)E1
.
Omitting s in the sequel, since
(AΦi,Φi)E1≤ −ε
2‖Φi‖2E1
− Λ1
2
1α− ε2
‖ζi‖2 −α
4‖A
1
4 ζi‖2
32

and (F(U)Φi,Φi
)E1
= −([β ‖∇u‖2 − f2
](−∆)ξi + 2β(∇u,∇ξi)(−∆)u, ζi
)≤
√2βr(ω)‖∇ξi‖‖∇ζi‖+
2βr2
Λ1
4
1
‖∇ξi‖‖ζi‖
≤ α
4‖A
1
4 ζi‖2 +2βr2(ω)
α‖A
1
4 ξi‖2 +2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)‖A
1
4 ξi‖2
+Λ
1
2
1α− ε2
‖ζi‖2,
hence,
Tr(A + F(U)) Qm(s) ≤ −ε2m+
(2βr2(ω)
α+
2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)
)m∑i=1
Λ− 1
2
i .
On the other hand, by the Lemma 6.3, Chapter VI in [1] and the compactness of A,we have
limn→∞
1
m
m∑i=1
Λ− 1
2
i = 0. (111)
Let
ωm(ω) = exp
(−ε
2m+
(2βr2(ω)
α+
2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)
)m∑i=1
Λ− 1
2
i
),
then
E ($m(DS(ω,U))) ≤ E ((ωm(ω))) ,
E (lnωm(ω)) ≤ −ε2m+ E
(2βr2(ω)
α+
2β2r4(ω)
Λ1
2
1 (Λ1
2
1α− ε)
)m∑i=1
Λ− 1
2
i , (112)
which together with (26) give
E
(2βr2
α+
2β2r4
Λ1
2
1 (Λ1
2
1α− ε)
)≤ 2βMmax
α+
2β2Mmax
Λ1
2
1 (Λ1
2
1α− ε)< +∞,
along with (111), we have the d defined by (31) is finite. Moreover, replace m in (112)by d, we find the (2.7) of Theorem 2.4 in [10] is satisfied.
Therefore, By the Theorem 2.4 in [10], we have dH(A (ω)) < d. Especially, if Λ− 1
2
1 ≤ε
4
(βMmax
α+ β2Mmax
Λ
121
(Λ
121α−ε)
) , we get d = 1, thus dH(A (ω)) = 0 which reals that the random
attractor comprise one random fixed point which is global asymptotical stable.
33

5. Conclusions
According to the Theorem 2.4 and Theorem 2.5, the Euler-Bernoulli beam equationdealt in this paper can generate a RDS which possesses global random attractorsattracting all bounded set in phase space. Actually, the proof to achieve the globalrandom absorbing set (Lemma 3.6) and verify the asymptotical compactness of theRDS (Lemma 3.9 and Proof of Theorem 2.5) induced by system (12) are indepen-dent to the strongly damping of the system, which indicates that if the damping isweakly form, such as, αut, the system (12) also possesses global random attractor. ByTheorem 2.6, the Hausdorff dimension of the attractor always be finite, in addition,the finite Hausdorff dimension estimation is rely on the strongly damping. In anotherwords, if the damping is too weak, maybe we can not obtain the finite estimationsof Hausdorff dimension for global random attractor. Furthermore, the Hausdorff di-mension estimation and the expectation of radius of global random attractor have adirect proportional relationship, which together with Theorem 2.5 gives that Haus-dorff dimension of the attractor is direct proportional to f2 which represent the axialforce. Alternatively, the large axial force lead to increase of the Hausdorff dimensionestimations.
From the engineering views, invoking the results on global dynamics, we find thatthere exists global (D-) bifurcation in the motion of the Euler-Bernoulli beam withincreasing the axial force in either autonomous situation or stochastic circumstance.However, the additive noise with certain intensity pushes the global bifurcation inautonomous situation to a random fixed point. Therewith, the global D-bifurcationoccurs in the motion of the Euler-Bernoulli beam with increasing the value of axialforce. Alternatively, the additive white noise with certain intensity delays the ap-pearance of global (D-) bifurcation in the motion of the Euler-Bernoulli beam. Thisphenomenon is different from the affect of additive noise in one-dimensional systemstudied by the Crauel [39], which asserted that the additive noise destroy the globalbifurcation.
Furthermore, the dynamics indicated above can set forth how does the randomsnap-through [55] which is a very important dynamical behavior in engineering appli-cation occurs in motion of the Euler-Bernoulli beam in the following manner. Whenthe dynamics of autonomous Euler-Bernoulli beam produce global bifurcation, thestationary response of Euler-Bernoulli beam is in one of the position described by theglobal point attractor for any given initial value. Since the additive white noise withcertain intensity perturbes global bifurcation to a fixed random point which dependon chance and move with time, moreover, for any fixed time, the fixed random pointis one point set, from the overall view, the fixed random point is distributed by lots ofpoints. Therefore, the stationary dynamics of Euler-Bernoulli beam in this case lookslike make a random motion between the position given by global basic attractor inautonomous case. This dynamical behavior is essentially the phenomenon of randomsnap-through. Intuitively speaking, the random snap-through seems to be a complexdynamics. Essentially, it is a simple dynamical behavior. Moreover, according to in-creasing the value of axial force and intensity of additive white noise loading, theglobal D-bifurcation in response of Euler-Bernoulli beam occurs, thus, the dynamicalbehavior of random snap-through can be eliminated.
In addition, less information about the more complex dynamical behavior (for in-stance, interpret the kinds of global D− bifurcation, chaotic behavior) is introduced inthis paper, we will pursue this work in another work by calculating global Lyapunovexponent [1] of the system. On the other hand, this manuscript dealt with global dy-
34

namics of Euler-Bernoulli beam under additive white noise loading, how about theEuler-Bernoulli beam driven by multiplicative with noise? it is another problem con-sidered in the further.
Appendix A. The model equation
Suppose u =k∑i=1
li(t)wi, k = k1 + k2, k1, k2 ∈ N, the following model equations associ-
ated with EBS with the following form
dm = (M1m + M2(m,m)) dt+ σM3dW,dm =
(M2m + M2(m,m)
)dt+ σM3dW, t ∈ (τh− h, τh];
m = mτh−h, t 6∈ (τh− h, τh](A1)
where l = (l1, · · · , lk1)T = (l1, · · · , lk1
)T which represent the low-frequency modal and
the other is high-frequency modal l = (l1, · · · , lk2)T = (lk1
, · · · , lk1+k2)T , li is the value
of l at time i. g = lt,g = lt,m = [l1, g1, · · · , lk, gk1
]T ,m = [l1, g1, · · · , lk, gk2]T . h is
step size of numerical integration, τ ∈ N is an undetermined constant.
M1 =
0 1 0 0 0
−Λ1 −αΛ1
2
1 0 0 0
0 0. . . 0 0
0 0 0 −Λk1−αΛ
1
2
k1
,
M2(m,m) = −
0
F1(l)...0
Fk1(l)
,M3(m) =
0
(q(x), w1)...0
(q(x), wk1)
and
M1 =
0 1 0 0 0
−Λk1+1 −αΛ1
2
k1+1 0 0 0
0 0. . . 0 0
0 0 0 −Λk −αΛ1
2
k
,
M3(m) = −
0
Fk1+1(l)...0
Fk(l)
,M3(m) =
0
(q(x), wk1+1)...0
(q(x), wk)
,
35

in which
F =
F 1...F k
=
(σq(x)W , w1
)...(
σq(x)W , wk
) ,
F(l) =
F1(l)...
Fk(l)
=
([β
∥∥∥∥∇ k∑i=1
liwi
∥∥∥∥2
− f2
](−∆)
k∑i=1
liwi, w1
)...([
β
∥∥∥∥∇ k∑i=1
liwi
∥∥∥∥2
− f2
](−∆)
k∑i=1
liwi, wk
)
(A2)
References
[1] Temam R. Infinite-dimensional dynamical systems in mechanics and physics. Springer-Verlag: New York, 1997.
[2] Chueshov I, Lasiecka I. Von Karman Evolution Equations: Well-posedness and Long TimeDynamics. Springer Science & Business Media, 2010.
[3] Chepyzhov V, Vishik M. A hausdorff dimension estimate for kernel sections ofnon-autonomous evolution equations. Indiana University Mathematics Journal 1993;42(3):1057–1076.
[4] Caraballo T, Langa J, Valero J. The dimension of attractors of nonautonomous partialdifferential equations. The ANZIAM Journal 2003; 45(2):207–222.
[5] Crauel H, Flandoli F. Attractors for random dynamical systems. Probability Theory andRelated Fields 1994; 100(3):365–393.
[6] Crauel H, Debussche A, Flandoli F. Random attractors. Journal of Dynamics and Dif-ferential Equations 1997; 9(2):307–341.
[7] Schmalfuss B. Measure attractors and stochastic attractors, institut for dynamische sys-teme. Technical Report, Bermen University 1995.
[8] Arnold L. Random dynamical systems. Springer-Verlag: Berlin, 1998.[9] Langa JA, Robinson JC. Fractal dimension of a random invariant set. Journal de
mathematiques pures et appliquees 2006; 85(2):269–294.[10] Debussche A. Hausdorff dimension of a random invariant set. Journal de mathematiques
pures et appliquees 1998; 77(10):967–988.[11] Bates PW, Lu K, Wang B. Random attractors for stochastic reaction–diffusion equations
on unbounded domains. Journal of Differential Equations 2009; 246(2):845–869.[12] Wang B. Random attractors for non-autonomous stochastic wave equations with multi-
plicative noise. Discrete & Continuous Dynamical Systems-A 2014; 34(1):269–300.[13] Zhou S, Yin F, Ouyang Z. Random attractor for damped nonlinear wave equations with
white noise. SIAM Journal on Applied Dynamical Systems 2005; 4(4):883–903.[14] Carvalho A, Langa JA, Robinson J. Attractors for infinite-dimensional non-autonomous
dynamical systems. Springer Science & Business Media, 2012.[15] Fan X, Chen H. Attractors for the stochastic reaction–diffusion equation driven by linear
multiplicative noise with a variable coefficient. Journal of Mathematical Analysis andApplications 2013; 398(2):715–728.
[16] Fan X. Attractors for a damped stochastic wave equation of sine–gordon type with sub-linear multiplicative noise. Stochastic Analysis and Applications 2006; 24(4):767–793.
[17] Wang B. Existence, stability and bifurcation of random complete and periodic solutionsof stochastic parabolic equations. Nonlinear Analysis: Theory, Methods & Applications2014; 103:9–25.
[18] Yin F, Li X. Fractal dimensions of random attractors for stochastic benjamin–bona–mahony equation on unbounded domains. Computers & Mathematics with Applications2017; .
36

[19] Keller H, Ochs G. Numerical approximation of random attractors. Stochastic dynamics.Springer, 1999; 93–115.
[20] Dellnitz M, Hohmann A. A subdivision algorithm for the computation of unstable mani-folds and global attractors. Numerische Mathematik 1997; 75(3):293–317.
[21] Shen HS. A two-step perturbation method in nonlinear analysis of beams, plates and shells.John Wiley & Sons: Hoboken, 2013.
[22] Ball J. Stability theory for an extensible beam. Journal of Differential Equations 1973;14(3):399–418.
[23] Ball J. Initial-boundary value problems for an extensible beam. Journal of MathematicalAnalysis and Applications 1973; 42(1):61–90.
[24] Patcheu SK. On a global solution and asymptotic behaviour for the generalized dampedextensible beam equation. Journal of Differential Equations 1997; 135(2):299–314.
[25] Morgul O. Dynamic boundary control of a euler-bernoulli beam. IEEE Transactions onautomatic control 1992; 37(5):639–642.
[26] Guo BZ, Yang KY. Dynamic stabilization of an euler–bernoulli beam equation with timedelay in boundary observation. Automatica 2009; 45(6):1468–1475.
[27] Bloch AM, Titi ES. On the dynamics of rotating elastic beams. New trends in systemstheory. Springer, 1991; 128–135.
[28] Ma TF, Narciso V. Global attractor for a model of extensible beam with nonlineardamping and source terms. Nonlinear Analysis: Theory, Methods & Applications 2010;73(10):3402–3412.
[29] Yang Z. On an extensible beam equation with nonlinear damping and source terms.Journal of Differential Equations 2013; 254(9):3903–3927.
[30] Kang JR. Uniform attractor for non-autonomous extensible beam equation. AsymptoticAnalysis 2012; 80(1-2):79–92.
[31] Chow P, Menaldi J, et al.. Stochastic pde for nonlinear vibration of elastic panels. Dif-ferential and Integral Equations 1999; 12(3):419–434.
[32] Brzezniak Z, Maslowski B, Seidler J. Stochastic nonlinear beam equations. Probabilitytheory and related fields 2005; 132(1):119–149.
[33] Awrejcewicz J, Krysko A, Zagniboroda N, Dobriyan V, Krysko V. On the general theoryof chaotic dynamics of flexible curvilinear euler–bernoulli beams. Nonlinear Dynamics2015; 79(1):11–29.
[34] Wiggins S. Global bifurcations and chaos: analytical methods, vol. 73. Springer Science &Business Media: Heidenburg, 2013.
[35] Feng Z, Wiggins S. On the existence of chaos in a class of two-degree-of-freedom, damped,strongly parametrically forced mechanical systems with brokeno (2) symmetry. Zeitschriftfur angewandte Mathematik und Physik ZAMP 1993; 44(2):201–248.
[36] Zhang W, Wang F, Yao M. Global bifurcations and chaotic dynamics in nonlinear non-planar oscillations of a parametrically excited cantilever beam. Nonlinear Dynamics 2005;40(3):251–279.
[37] Hsu C. A theory of cell-to-cell mapping dynamical systems. Journal of Applied Mechanics1980; 47(4):931–939.
[38] Xu W, He Q, Fang T, Rong H. Stochastic bifurcation in duffing system subject to har-monic excitation and in presence of random noise. International Journal of Non-LinearMechanics 2004; 39(9):1473–1479.
[39] Crauel H, Flandoli F. Additive noise destroys a pitchfork bifurcation. Journal of Dynamicsand Differential Equations 1998; 10(2):259–274.
[40] Crauel H. Random point attractors versus random set attractors. Journal of the LondonMathematical Society 2001; 63(2):413–427.
[41] Crauel H. Global random attractors are uniquely determined by attracting deterministiccompact sets. Annali di Matematica pura ed applicata 1999; 176(1):57–72.
[42] Chekroun MD, Simonnet E, Ghil M. Stochastic climate dynamics: Random attrac-tors and time-dependent invariant measures. Physica D: Nonlinear Phenomena 2011;240(21):1685–1700.
[43] Schenk-Hoppe KR. Random attractors–general properties, existence and applications tostochastic bifurcation theory. Discrete & Continuous Dynamical Systems-A 1998; 4(1):99–130.
[44] Elworthy K. Stochastic dynamical systems and their flows. Stochastic analysis 1978; :79–95.
37

[45] Arnold L, Schmalfuss B. Fixed points and attractors for random dynamical systems.IUTAM Symposium on Advances in Nonlinear Stochastic Mechanics, Springer, 1996; 19–28.
[46] Chen H, Cao D, Jiang J, Fan X. Long time behavior and global dynamics of simplified vonkarman plate without rotational inertia driven by white noise. Symmetry 2018; 10(8):315.
[47] Birnir B. Basic Attractors and Control. Springer-Verlag: New York, 2015.[48] Multiphysics A. COMSOL Multiphysics 3.5 a Reference Manual, PDE mode equation
based modeling. Multiphysics Ltd: Stohkholm,Sweden, 2008.[49] Debussche A, Temam R. Some new generalizations of inertial manifolds. Discrete & Con-
tinuous Dynamical Systems-A 1996; 2(4):543–558.[50] Marion M, Temam R. Nonlinear galerkin methods. SIAM Journal on Numerical Analysis
1989; 26(5):1139–1157.[51] Kloeden P, Eckhard P. Numerical solution of stochastic differential equations. Springer-
Verlag: Berlin, 1992.[52] Khanmamedov AK. Global attractors for von karman equations with nonlinear interior
dissipation. Journal of mathematical analysis and applications 2006; 318(1):92–101.[53] Lions JL, Magenes E. Non-homogeneous boundary value problems and applications.
Springer Science & Business Media: Paris, 2012.[54] Zheng S. Nonlinear evolution equations. CRC Press: Florida, 2004.[55] Crisfield M. A fast incremental/iterative solution procedure that handles ”snap-through”.
Computational Methods in Nonlinear Structural and Solid Mechanics. Elsevier, 1981; 55–62.
38