Embed Size (px)
DESCRIPTION
Source term estimation (STE) of hazardous material (HAZMAT) releases is critical for emergency response. Such problem is usually solved with the aid of atmospheric dispersion modelling and inversion algorithms accompanied with a variety of uncertainty, including uncertainty in atmospheric dispersion models, uncertainty in meteorological data, uncertainty in measurement process and uncertainty in inversion algorithms. Bayesian inference methods provide a unified framework for solving STE problem and quantifying the uncertainty at the same time. In this paper, three stochastic methods for STE, namely Markov chain Monte Carlo (MCMC), sequential Monte Carlo (SMC) and ensemble Kalman filter (EnKF), are compared in accuracy, time consumption as well as the quantification of uncertainty, based on which a kind of flip ambiguity phenomenon caused by various uncertainty in STE problems is pointed out. The advantage of non-Gaussian estimation methods like SMC is emphasized.
Citation preview

公共安全研究院INSITITUTE OF PUBLIC SAFETY RESEARCH
Yan Wang1 , Hong Huang1, Wei Zhu2
Stochastic source term estimation of HAZMAT releases:
algorithms and uncertainty
1Institute of Public Safety Research,
Department of Engineering Physics,
Tsinghua University2Beijing Research Center of Urban System Engineering,
Beijing Academy of Science and Technology

清华大学公共安全研究院Institute of Public Safety Research
Outline
Introduction
The Bayesian framework
Description of the three stochastic methods
Simulations and results
Conclusion

清华大学公共安全研究院Institute of Public Safety Research
Introduction (1)
The release of hazardous material is an
enormous threat to public safety.
Natural disaster, accidents, terrorist acts

清华大学公共安全研究院Institute of Public Safety Research
Introduction (2)
Information about the source parameters
plays an important role in decision making
and damage mitigation.
Gas type
Source location
Release rate
Release time

清华大学公共安全研究院Institute of Public Safety Research
Introduction (3)
Requirements for STE Approaches Effective
Quantitative and accurate
Efficient
Provide a solution within given time constraints
Flexible
Adaptable to a variety of classes of observations
Adaptable to problems of various scales
Robust
Can be used in operational or high consequence situations
Quantifies uncertainty
Probabilities are assigned to each possible state or outcome
This page is modified from National Center for Atmospheric Research (NCAR)

清华大学公共安全研究院Institute of Public Safety Research
Introduction (4)
Some popular methods for STE
Forward modelling
Optimization methods + Atmospheric transport and dispersion
(AT&D) model
Thomson et al. (2007), Zheng and Chen (2010)
Bayesian inference + AT&D model
Wade and Senocak (2013) , Hazart et al(2014)
Bayesian inference + Adjoint AT&D model
Keats et al.(2007), Guo et al.(2009)
Backward modelling
Reverse-time CFD (Eulerian)
Bady et al.(2009)
Backward Lagrangian stochastic (bLS) model
Wilson et al.(2012), Wang et al.(2013)

清华大学公共安全研究院Institute of Public Safety Research
Introduction (5)
Uncertainty in atmospheric dispersion
modelling, Rao (2005)
Initial and boundary conditions
Simplified treatment of complex physical or
chemical processes
Turbulent nature of the atmosphere
Approximate numerical solutions
Unpredictable human activities

清华大学公共安全研究院Institute of Public Safety Research
Basic idea
Features Take advantage of prior information
Incorporate model error and observation error
Quantify the uncertainty of estimation results
( ) ( ) 2
(t)2 (t)21 1 , ,
( | ) (X)( | )
(Y)
[ ( ) ]( | ) ( | ) (
| ( )
,
) exp2( )
,
t tm ki i
t i y i f i
denote the source paramet
p Y X pp X Y
p
F Yp Y X p Y T p T F X
ers
denote the observed concentration
concentra
dT
where
X
Y
T denote the true
X
( )
,
tion
concentration withF X denote the predict source parameed ters X
The Bayesian framework (1)

清华大学公共安全研究院Institute of Public Safety Research
The Bayesian framework (2)
The Posterior distribution is difficult to
calculate directly.
Approximate the Posterior distribution by
stochastic sampling
Markov chain Monte Carlo (MCMC)
Sequential Monte Carlo (SMC)
Ensemble Kalman filter (EnKF)

清华大学公共安全研究院Institute of Public Safety Research
Markov chain Monte Carlo
Metropolis-Hasting algorithm

清华大学公共安全研究院Institute of Public Safety Research
Sequential Monte Carlo
Sequential importance resampling (SIR)
1 1
1 1
1 1
( ) ( )( )
( )
j j j
j j j j
j j j
p pw w w p
q
Y X X X
Y XX X

清华大学公共安全研究院Institute of Public Safety Research
Ensemble Kalman filter
Kalman filter
Ensemble Kalman filter
A Monte Carlo approximation of the Kalman Filter.
Applicable to high-dimensional nonlinear system.
All probability distributions involved are Gaussian.

清华大学公共安全研究院Institute of Public Safety Research
Simulations and results (1)
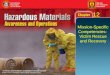
The synthetic experiment
• Observation: add a
maximum of 50% random
noise to the model output.
• Flat prior on the location and
strength of the source:
x ~ U[-10,60], x0=0
y ~ U[-20,30], y0=0
Q ~ U[500,20000],
Q0=10434
Gaussian plume model

清华大学公共安全研究院Institute of Public Safety Research
Simulations and results (2)
Location estimation

清华大学公共安全研究院Institute of Public Safety Research
Simulations and results (3)
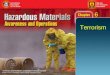
Strength estimation

清华大学公共安全研究院Institute of Public Safety Research
Simulations and results (4)
Efficiency comparison
MCMC SMC EnKF
Convergence step 17325 138 173
Number of running the forward
model per iteration1 100 101
Particle number or ensemble
size per iteration1 100 100
Total running of the forward
model until convergence17325 13800 17473

清华大学公共安全研究院Institute of Public Safety Research
Some further discussion
Simulations and results (5)
Requirements
for STE ApproachesMCMC SMC EnKF
Effective 1 1 1
Efficient Good Faster Faster
Flexible — — —
Robust — — —
Quantifies uncertainty Good Good Limited
Within the scenario in this work

清华大学公共安全研究院Institute of Public Safety Research
Conclusion
Conclusion Three stochastic methods for STE are implemented under a unified
Bayesian framework, and are compared in accuracy, time
consumption as well as the quantification of uncertainty.
MCMC and SMC give similar results while EnKF tends to
overestimate the release rate and fails to capture the non-
Gaussian features of the posterior.
SMC and EnKF are inherently parallel and cost much less time to
convergence.
The flip ambiguity phenomenon is considered to be caused by the
axial symmetry of the experiment setup as well as the random
noise added to the synthetic concentration data.

清华大学公共安全研究院Institute of Public Safety Research
Thank you for your time and attention.
Any questions?