Embed Size (px)
Citation preview
Stokastisk Adaptiv ReguleringStokastiske systemer, Identikation og Regulering.
Niels Kjølstad PoulsenInformatik og Matematisk ModelleringDanmarks Tekniske UniversitetVersion: 15. januar 2007
2

3ForordNærværende note er fremstillet med henblik på anvendelse i forbindelse med undervisningeni faget, Stokastisk Adaptiv Regulering 02421 (tidligere 0414 og 04342), der gives vedInformatik og for Matematisk Modellering (IMM), Danmarks Tekniske Universitet.Indholdet af disse noter svarer til udvalgte emner indenfor fagområdet stokastisk kontrol-teori, der er relevant for adaptiv regulering. Disse emner er:• Beskrivelse og analyse af stokastiske systemer• Bestemmelse af reguleringsstrategier til stokastiske systemer• Systemidentikation, dvs. modellering af stokastiske systemer• Adaptiv reguleringDisse noter indeholder den nødvendige basis for at kunne behandle stokastiske systemer,d.v.s. dynamiske systemer påvirket af stokastiske forstyrrelser. I dette fag behandles (somnavnet antyder) både metoder til regulering og til modellering (identikation) af stokastiskesystemer. En sammenkobling af to sådanne metoder udgør en adaptiv regulator, der kantilpasse sig til det aktuelle system.Noten indeholder naturligvis først og fremmest pensum til faget (0414) Stokastisk Adap-tiv Regulering. Men derudover indeholder noterne emner og metoder som ikke gennemgås ikurset, men som kan danne grundlag for videre anvendelser f. eks. i forbindelse med individu-elle kurser og eksamensarbejder indenfor fagområdet stokastisk kontrolteori (dvs. stokastiskesystemer, identikation og regulering).Der rettes en tak til alle der har medvirket til at disse noter har fået den nuværende udform-ning. Spe ielt rettes en tak til Jens Parkum, Torben Knudsen, Bent Georg Thygesen, An aPetrov Hansen, Ma Xin, Morten Rostgaard Jensen, Henrik Be hmann, Lars Henrik Hansen,Morten Lauritsen og Ue H. Thygesen for deres værdifulde kommentarer og rettelser.
4
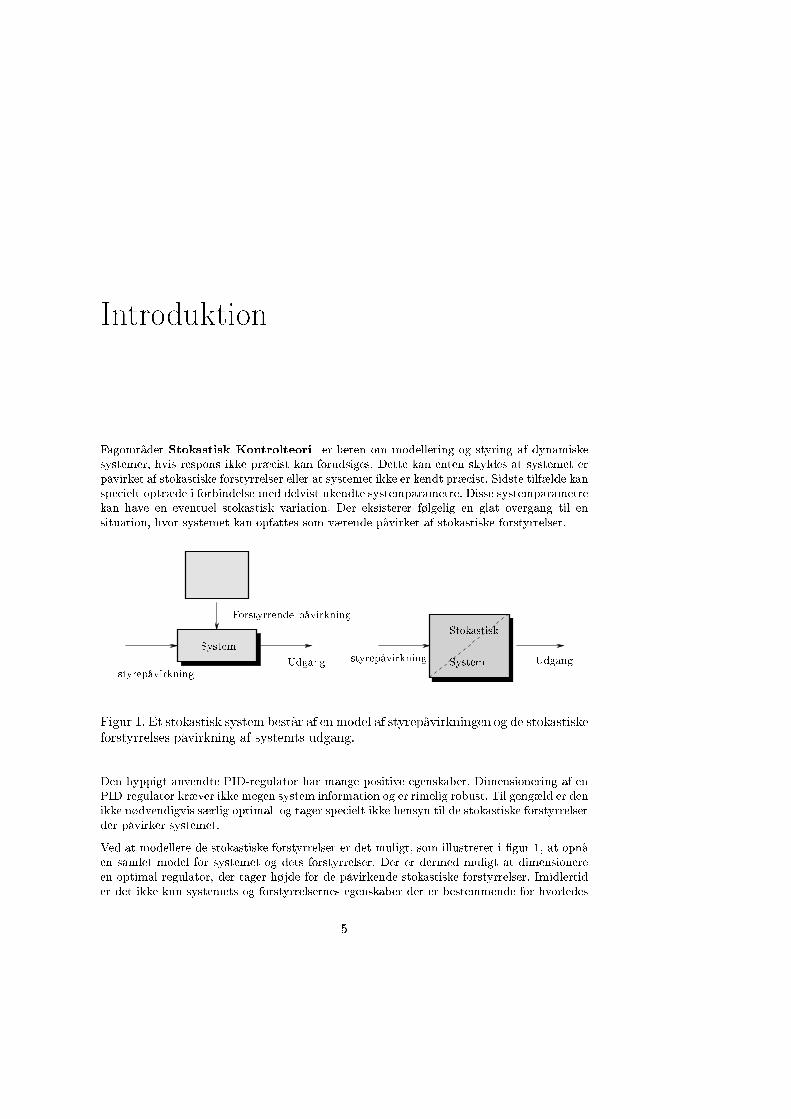
IntroduktionFagområdet Stokastisk Kontrolteori er læren om modellering og styring af dynamiskesystemer, hvis respons ikke præ ist kan forudsiges. Dette kan enten skyldes at systemet erpåvirket af stokastiske forstyrrelser eller at systemet ikke er kendt præ ist. Sidste tilfælde kanspe ielt optræde i forbindelse med delvist ukendte systemparametre. Disse systemparametrekan have en eventuel stokastisk variation. Der eksisterer følgelig en glat overgang til ensituation, hvor systemet kan opfattes som værende påvirket af stokastiske forstyrrelser.
Forstyrrende påvirkningUdgangSystem UdgangStokastiskstyrepåvirkningstyrepåvirkning SystemFigur 1. Et stokastisk system består af en model af styrepåvirkningen og de stokastiskeforstyrrelses påvirkning af systemts udgang.Den hyppigt anvendte PID-regulator har mange positive egenskaber. Dimensionering af enPID-regulator kræver ikke megen system information og er rimelig robust. Til gengæld er denikke nødvendigvis særlig optimal og tager spe ielt ikke hensyn til de stokastiske forstyrrelserder påvirker systemet.Ved at modellere de stokastiske forstyrrelser er det muligt, som illustreret i gur 1, at opnåen samlet model for systemet og dets forstyrrelser. Der er dermed muligt at dimensionereen optimal regulator, der tager højde for de påvirkende stokastiske forstyrrelser. Imidlertider det ikke kun systemets og forstyrrelsernes egenskaber der er bestemmende for hvorledes5
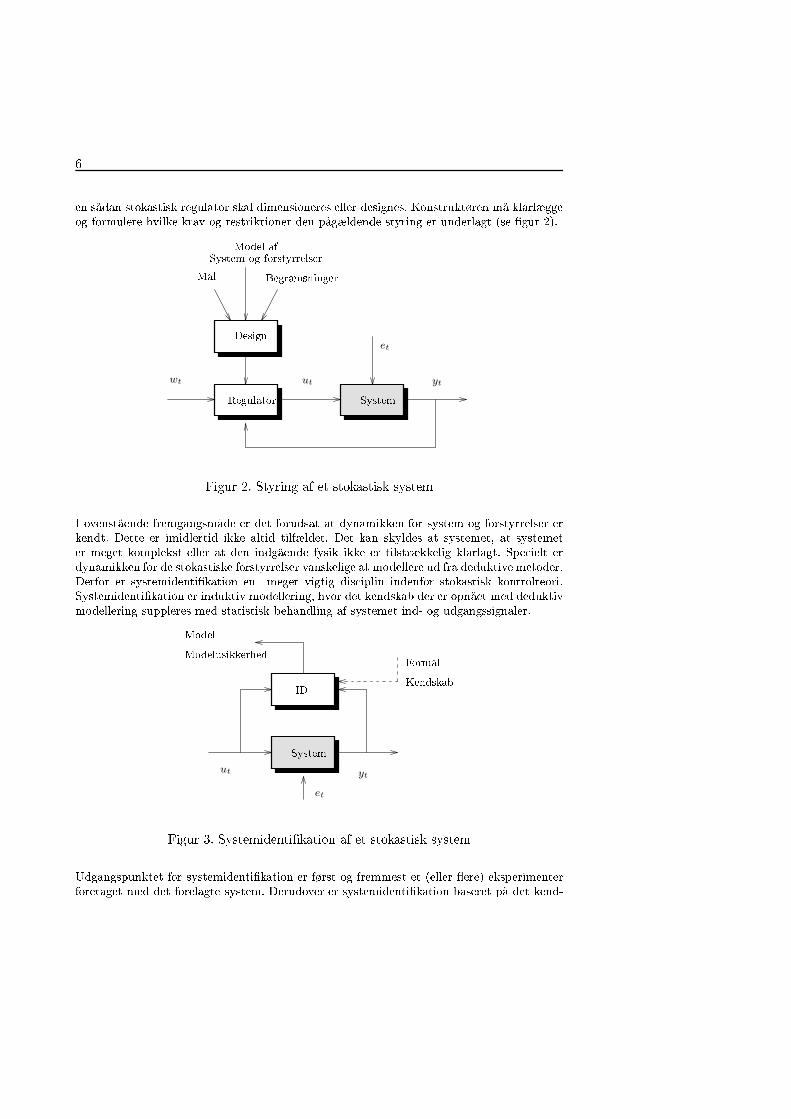
6en sådan stokastisk regulator skal dimensioneres eller designes. Konstruktøren må klarlæggeog formulere hvilke krav og restriktioner den pågældende styring er underlagt (se gur 2).wt
Designyt
et
ut
System og forstyrrelserModel afMål BegrænsningerSystemRegulator
Figur 2. Styring af et stokastisk systemI ovenstående fremgangsmåde er det forudsat at dynamikken for system og forstyrrelser erkendt. Dette er imidlertid ikke altid tilfældet. Det kan skyldes at systemet, at systemeter meget komplekst eller at den indgående fysik ikke er tilstrækkelig klarlagt. Spe ielt erdynamikken for de stokastiske forstyrrelser vanskelige at modellere ud fra deduktive metoder.Derfor er systemidentikation en meget vigtig dis iplin indenfor stokastisk kontrolteori.Systemidentikation er induktiv modellering, hvor det kendskab der er opnået med deduktivmodellering suppleres med statistisk behandling af systemet ind- og udgangssignaler.ModelModelusikkerhed ID FormålKendskabyt
et
ut
SystemFigur 3. Systemidentikation af et stokastisk systemUdgangspunktet for systemidentikation er først og fremmest et (eller ere) eksperimenterforetaget med det forelagte system. Derudover er systemidentikation baseret på det kend-

7skab, der er opnået med deduktiv modellering. Derudover spiller den konkrete anvendelse enbetydelig rolle i forbindelse med f.eks. valg at modelstruktur. Resultatet af en systemidenti-kation er først og fremmest en model af det forelagte system. Dvs. en model af selve systemetsamt en model af de stokastiske forstyrrelser. Derudover resulterer systemidentikationen iet kvalitetsmål for modellen, dvs. et estimat over modelusikkerheden.En regulator til et stokastisk system kan således designes ud fra en model, der er opnåetved hjælp af systemidentikation. Hvis systemet undergår langsomme ændringer, f.eks. pågrund af ælde eller slitage, kan eksperimentet og systemidentikationen udføres ved passendemellemrum, således der kan designes en regulator, der svarer til den aktuelle dynamik.IDwt Regulator SystemDesign
et
ut
yt
Figur 4. Adaptiv regulering af et stokastisk systemEr tidsvariationen i dynamikken hurtigere kan systemidentikationen udføres i real tid ogsimultant med reguleringen. Derved fremkommer en adaptiv regulator (af den type derbetegnes som en selvindstiller) der er i stand til at tilpasse reguleringen efter det aktuellesystem og dets variationer.Dette kursus, stokastisk adaptiv regulering, har et redelt formål som kan illustreres i gur5. Først gennemgås metoder til beskrivelse og analyse af stokastiske systemer. Disse metoderStokastiske Systemer
Adaptiv regulering
Regulering Systemidentifikation
Figur 5. Stokastisk adaptiv regulering har re måldanner basis for hvorledes disse systemer skal styres (reguleres) og hvorledes de modelleres(identi eres ud fra målinger af indgangs- og udgangssignaler). Det er klart at en adaptiv

8regulator, der består af en kombination af en regulator, en designalgoritme og en identi-kations metode, bygger på netop sådanne metoder. Noternes opbygning afspejler dennesammenhæng på følgende måde som illustreret i gur 6. Alle re hovedområder er baseretIndledning og Basis
Del I
Appendix
Del V
Del II
Stokastiske Systemer
Del II
Systemidentifikation
Del III
Adaptive Systemer
Del IV
Regulering og Filtrering
Figur 6. Opbygning af noterpå resultater, der er præsenteret i basis og i appendix.Faget har naturligvis relationer til den deterministiske reguleringsteori og de øvrige kurserindenfor fagområdet styring og regulering. Der er derfor af spe ielt pædagogiske grundemedtaget et afsnit således en sammenligning mellem regulatorer baseret på stokastiske- ogdeterministiske metoder let kan foretages.Indenfor spe ielt beskrivelsen af stokastiske systemer og systemidentikation har faget til-knytning til statistik fagene, spe ielt tidsrækkeanalyse og stokastiske pro esser. Faget hardeslige en knytning til dynamisk optimering fra operationsanalysen.

IndholdI Del 1: Basis 191 Systemteori 211.1 Systemrepræsentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.2 Sampling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361.2.1 Sampling af tidskontinuert signal . . . . . . . . . . . . . . . . . . . . . 371.2.2 Digitalt styresignal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391.2.3 Sampling af målbar påvirkning . . . . . . . . . . . . . . . . . . . . . . 411.2.4 Valg af samplingsfrekvens . . . . . . . . . . . . . . . . . . . . . . . . . 441.3 Tidsdiskrete Systemer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461.4 Tilstandstransformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521.4.1 Similartransformationer . . . . . . . . . . . . . . . . . . . . . . . . . . 521.4.2 Diagonalform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531.4.3 Regulatorkanonisk form . . . . . . . . . . . . . . . . . . . . . . . . . . 541.4.4 Observerkanonisk form . . . . . . . . . . . . . . . . . . . . . . . . . . . 551.4.5 Styrbarhedskanonisk form . . . . . . . . . . . . . . . . . . . . . . . . . 561.4.6 Observerbarheds kanonisk form . . . . . . . . . . . . . . . . . . . . . . 561.4.7 Relation mellem kanoniske former . . . . . . . . . . . . . . . . . . . . 571.4.8 Generelle transformationer . . . . . . . . . . . . . . . . . . . . . . . . 571.4.9 Den direkte realisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 581.5 Poler og nulpunkter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 599

10 INDHOLD1.5.1 Poler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 611.5.2 Nulpunkter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 631.5.3 Referen emodeller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671.6 Stabilitet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671.6.1 Stabilitet af lineære, tidsinvariante systemer . . . . . . . . . . . . . . . 711.6.2 Lyapunov stabilitet for Lineære, tidsinvariante Systemer . . . . . . . . 721.7 Styrbarhed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 731.8 Observerbarhed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 801.9 Dekomposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 861.10 Sensitivitet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 902 Deterministisk Regulering 952.1 Tilstandstilbagekobling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952.2 Polpla ering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 962.2.1 Regulering af system på kanonisk form . . . . . . . . . . . . . . . . . . 972.2.2 Polpla ering for skalart system . . . . . . . . . . . . . . . . . . . . . . 982.3 Optimal tilstandstilbagekobling . . . . . . . . . . . . . . . . . . . . . . . . . . 982.3.1 Det Basale LQ-Problem . . . . . . . . . . . . . . . . . . . . . . . . . . 1002.4 Observer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1022.4.1 Observer for system på kanonisk form . . . . . . . . . . . . . . . . . . 1042.4.2 Observer for skalart system . . . . . . . . . . . . . . . . . . . . . . . . 1042.5 Observerbaseret regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052.6 Eksterne regulatorer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052.7 Digital PID-regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1072.8 Generel Polpla ering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1102.9 PZ-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152.10 Polpla ering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1163 Statistisk Basis. 1193.1 Stokastiske Skalære Variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1193.2 Momenter og Forventning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1223.2.1 Den skalære normalfordeling . . . . . . . . . . . . . . . . . . . . . . . 124
INDHOLD 113.2.2 χ2-fordelingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1263.2.3 F-fordelingen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273.2.4 Student`s t-fordelingen . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273.3 Afhængighed mellem Stokastiske Skalære Variable . . . . . . . . . . . . . . . 1283.4 Stokastiske Vektorer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1313.5 Afhængighed mellem Stokastiske Vektorer . . . . . . . . . . . . . . . . . . . . 1353.6 Den Vektorielle Normalfordeling . . . . . . . . . . . . . . . . . . . . . . . . . 1423.7 Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1533.7.1 LS-estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1573.7.2 Egenskaber for LS-estimatoren . . . . . . . . . . . . . . . . . . . . . . 1593.8 ML-Estimation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1633.9 Bayes Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167II Del 2: Stokastiske systemer og regulering 1714 Stokastiske systemer og pro esser 1734.1 Stokastiske Pro esser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1764.2 Beskrivelse af stokastiske pro esser . . . . . . . . . . . . . . . . . . . . . . . . 1784.3 Basale Egenskaber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1814.3.1 Andenordens Pro esser . . . . . . . . . . . . . . . . . . . . . . . . . . 1814.3.2 Normale Pro esser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1814.3.3 Pro esser med uafhængige inkrementer . . . . . . . . . . . . . . . . . . 1824.3.4 Stokastisk Stationaritet . . . . . . . . . . . . . . . . . . . . . . . . . . 1824.3.5 Ergodiske Pro esser. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1854.3.6 Markov Pro esser. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1864.3.7 Fordelingsudvikling for en Markovpro es . . . . . . . . . . . . . . . . . 1874.4 Kovariansfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1904.5 Spektralegenskaber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1934.6 Konvergens af stokastiske Pro esser. . . . . . . . . . . . . . . . . . . . . . . . 1995 Stokastiske Pro esmodeller. 2035.1 Interne Pro esmodeller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
12 INDHOLD5.2 Fordelingsudvikling for en markovpro es . . . . . . . . . . . . . . . . . . . . . 2055.3 Lineære Gaussiske Pro esser. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2065.4 Lineære Tidsinvariante Pro esser. . . . . . . . . . . . . . . . . . . . . . . . . . 2095.5 Eksterne Pro esmodeller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2165.6 Spektralfaktorisering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2236 Dynamiske Systemer påvirket af Støj 2296.1 Intern Systembeskrivelse. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2306.1.1 Analyse af interne stokastiske systemer . . . . . . . . . . . . . . . . . . 2366.2 Similartransformationer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2396.3 Ekstern Systembeskrivelse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2406.3.1 Stationære Pro esser . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2436.3.2 Modelstrukturer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2457 Filterteori - Intern Beskrivelse 2497.1 Tilstandsestimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2517.1.1 Kalmanlter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2567.1.2 Det Prædiktive Kalmanlter . . . . . . . . . . . . . . . . . . . . . . . 2597.2 Korrelation mellem måle- og pro esstøj . . . . . . . . . . . . . . . . . . . . . 2607.3 Estimationsfejlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2657.4 Prædiktionsfejlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2657.5 Stationære forhold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2697.6 Prædiktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2737.7 Kalmanlter for ulineære systemer . . . . . . . . . . . . . . . . . . . . . . . . 2758 Filterteori - Ekstern beskrivelse 2778.1 Prædiktion i ARMA-strukturen . . . . . . . . . . . . . . . . . . . . . . . . . . 2788.2 Prædiktion i ARMAX-strukturen . . . . . . . . . . . . . . . . . . . . . . . . . 2828.3 Prædiktion i L-strukturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2849 Stokastisk Regulering - Intern Beskrivelse 2879.1 Stokastisk Statisk Optimering . . . . . . . . . . . . . . . . . . . . . . . . . . . 2949.2 PC-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
INDHOLD 139.3 GPC-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3039.4 Stokastisk Dynamisk Optimering . . . . . . . . . . . . . . . . . . . . . . . . . 3059.4.1 Bellmans ligning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3059.5 Fuldstændig Tilstandsinformation . . . . . . . . . . . . . . . . . . . . . . . . . 3089.6 Ufuldstændig Tilstandsinformation I . . . . . . . . . . . . . . . . . . . . . . . 3159.6.1 Lukketsløjfe egenskaber I . . . . . . . . . . . . . . . . . . . . . . . . . 3199.7 Ufuldstændig Tilstandsinformation II . . . . . . . . . . . . . . . . . . . . . . . 3209.7.1 Lukketsløjfe egenskaber II . . . . . . . . . . . . . . . . . . . . . . . . . 32410 Stokastisk regulering - Ekstern beskrivelse 32710.1 Problemformulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32710.1.1 Systemdynamik og omgivelsers påvirkninger . . . . . . . . . . . . . . . 32810.1.2 Kriterium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32910.1.3 Restriktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33010.2 Minimalvariansregulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33110.3 MV0-Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33610.4 Stokastisk PZ-Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34110.5 Generel Stokastisk Polpla ering . . . . . . . . . . . . . . . . . . . . . . . . . . 34410.6 Generaliseret Minimalvarians Regulering . . . . . . . . . . . . . . . . . . . . . 34710.6.1 MV1-Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35210.6.2 MV3-Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35210.7 GPC-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35310.8 LQG - Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35510.8.1 Spe ialtilfælde af LQG-regulering . . . . . . . . . . . . . . . . . . . . . 35710.9 Oversigt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358III Del 3: System identikation 36111 Systemidentikation 36312 Ikke-parametriske metoder 36712.1 Transientanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367

14 INDHOLD12.2 Frekvensresponsmetoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36912.3 Korrelationsmetoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37112.4 Spektralanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37213 Parameterestimation - Eksterne Modeller 37513.1 ARX-Strukturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37613.1.1 LS-Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37713.1.2 OE-metoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38213.1.3 IV-Estimation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38313.1.4 ML-Estimation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38513.1.5 Bayes Estimation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38813.2 ARMAX-Strukturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39013.2.1 ELS-Estimastion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39113.2.2 ML-Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39313.3 L-strukturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39613.3.1 PEM-estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39814 Parameterestimation - Interne modeller 40314.1 LS-metoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40414.2 ML-metoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40414.3 EKF-metoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40515 Modelvalidering 40715.1 Modelverikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40815.1.1 Marginale test i parametre . . . . . . . . . . . . . . . . . . . . . . . . 40815.1.2 Modelreduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40915.1.3 Singulærværdianalyse af variansmatri en P . . . . . . . . . . . . . . . 41015.1.4 Konditionstal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41115.1.5 Sammenfaldende Nulpunkter og Poler . . . . . . . . . . . . . . . . . . 41215.2 Residualanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41415.2.1 Test i middelværdi og varians . . . . . . . . . . . . . . . . . . . . . . . 41715.2.2 Fortegnstest . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418

INDHOLD 1515.2.3 Test i kovariansfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . 41915.3 Test i krydskovariansfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . 42115.3.1 Test i spektraltæthed . . . . . . . . . . . . . . . . . . . . . . . . . . . 42315.3.2 Test i fordeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42315.4 Test mellem modeller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42415.4.1 Forklaringsgrad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42415.4.2 F-testen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42415.4.3 Informationskriterier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42616 Rekursiv Estimation 42916.1 RLS-algoritmen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42916.2 RELS- og RML-algoritmerne . . . . . . . . . . . . . . . . . . . . . . . . . . . 43216.2.1 RELS-algoritmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43216.2.2 RML-algoritmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43316.3 RPLR- og RPEM-algoritmerne . . . . . . . . . . . . . . . . . . . . . . . . . . 43316.3.1 RPLR-algoritmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43416.3.2 RPEM-algoritmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43416.4 STA-algoritmer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43417 Tidsvariende Systemer 43717.1 Glemselsmetoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43717.1.1 Resetting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43717.1.2 Konstant Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43817.1.3 Eksponentiel glemsel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43817.1.4 Fortes ues metode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44117.2 Modelestimatorer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44217.2.1 Stokastiske Modeller . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442IV Del 4: Adaptive systemer 44518 Adaptiv Regulering. 44718.1 Indledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447
16 INDHOLD18.2 Adaptiv Regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44819 Den Basale Selvindstiller 45319.1 Ekspli it version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45419.2 Impli it version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45719.2.1 Basal impli it selvindstiller for ARX-system . . . . . . . . . . . . . . . 45819.2.2 Basal impli it selvindstiller for ARMAX-system . . . . . . . . . . . . . 46020 Ekspli itte Selvindstillere. 46320.1 Ekspli it MV0-regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46420.1.1 Identikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46420.1.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46520.1.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46520.2 Ekspli it Polpla ering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46520.2.1 Identikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46620.2.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46620.2.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46720.3 Ekspli it GMV-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46720.3.1 Identikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46720.3.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46820.3.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46920.4 Ekspli it LQG-regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46920.4.1 Identikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46920.4.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47020.4.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47021 Impli itte Selvindstillere. 47121.1 Impli it MV0-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47221.2 Impli it PZ-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47321.3 Impli it GMV-regulering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475
INDHOLD 17V Del 5: Appendi es 477A Transformationer 479A.1 Fouriertranformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479A.1.1 Egenskaber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481A.1.2 Tidsdiskrete signaler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484A.2 Lapla etransformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484A.2.1 Egenskaber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485A.2.2 Tidsdiskret signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486A.3 Z-Transformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487A.3.1 Egenskaber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 488A.3.2 Spe ielle Funktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . 488B Samplede Systemer 489C Matri er 491C.1 Transponering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492C.2 Sporet af en kvadratisk matrix . . . . . . . . . . . . . . . . . . . . . . . . . . 492C.3 Determinant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492C.4 Inversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493C.5 Afhængighed og ortogonalitet . . . . . . . . . . . . . . . . . . . . . . . . . . . 494C.6 Linære afbildninger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495C.7 Lineære ligningssystemer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496C.7.1 Tilfældet n = m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496C.7.2 Tilfældet n > m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497C.7.3 Tilfældet n < m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497C.8 Basisskifte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498C.9 Egenværdier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498C.10 Cayley-Hamiltons sætning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499C.11 Partitionerede Matri er . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 500C.12 Blokmatri er . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501C.13 Positive denitte matri er . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502
18 INDHOLDD Kvadratiske former 503E Diophantineligningen 509E.1 Sylvestermetoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510E.1.1 Impulsresponsmetoden . . . . . . . . . . . . . . . . . . . . . . . . . . . 511F Spektralfaktorisering 513G Vektor og Matrix dierentiation 517H Trinrespons for et andenordens system 521I Minimerings Algoritmer 525I.1 Additive Tabsfunktioner. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526I.2 Rekursive metoder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527

Del IDel 1: Basis
19


Kapitel 1SystemteoriI dette kapitel skal vi meget kort diskutere nogle elementer fra den deterministiske system-teori. Vi vil indledningsvis beskæftige os med forskellige metoder til at beskrive determi-nistiske dynamiske systemer. Der vil først blive taget udgangspunkt i en intern beskrivelse(state spa e beskrivelse, tilstandsbeskrivelse), hvor den interne dynamik spiller en betyde-lig rolle. Derefter vil beskæftige os med en ekstern beskrivelse, hvor kun den dynamiskesammenhæng mellem ind- og udgangssignaler beskrives. Tyngdepunktet ligger på systemerbeskrevet i diskret tid, fordi de følgende kapitler hovedsagelig vil omhandle tidsdiskrete sto-kastiske systemer. Dette kapitel afsluttes med en omtale af vigtige begreber så som stabilitet,observerbarhed og styrbarhed.1.1 SystemrepræsentationSystembegrebet tager udgangspunkt i en afgrænsning i det vi iagttager, dvs. systemet, og detsom vi henregner til systemets omgivelser. Et system er med andre ord deneret ved dets af-grænsning og hvorledes det kommunikerer med omgivelserne. Vi karakteriserer et dynamisksystems tilstand ved værdien af nogle størrelser som vi betegner som systemets tilstands-variable. Disse kan arrangeres i en vektor, x(t), der betegnes som systemets tilstandsvektoreller blot systemets tilstand. Disse tilstandsvariable undergår visse forandringer eller pro- esser. Udviklingen af et systems tilstande er afhængig af ere størrelser. For det første erudviklingen bestemt af systemets nuværende tilstand og vi taler i den forbindelse om internetilbagekoblinger. Dernæst kan omgivelsernes påvirkning(er) opdeles i tre forskellige typer,nemlig i styresignaler, målbare forstyrrelser og endelig i ikke målbare forstyrrelser (jvf. gur1.1). Vi vil behandle disse tre typer under et og betegner dem i det følgende som u(t), dergenerelt kan være en vektor indeholdende de tre typer af påvirkninger. For mange dynami-ske systemer er det muligt at beskrive udviklingen af systemets tilstandsvariable med pro es21

22 1.1 SystemrepræsentationSystemOmgivelserStyreindgreb x(t)
ForstyrrelserFigur 1.1. Et system er deneret ved dets afgrænsningligning af formen:
d
dtx(t) = f(x(t), u(t), t) x(t0) = x0 (1.1)altså af n koblede ulineære dierentialligninger. Her er n antallet af variable i x og systemets(egentlig beskrivelsens) orden. Det må bemærkes at hverken valget at tilstandsvariable ellervalget af antal tilstandsvariable er entydigt. For antallet af tilstandsvariable eksisterer ennedre grænse og en beskrivelse der består af dette minimale antal tilstandsvariable, betegnesderfor også som en minimal beskrivelse.Eksempel: 1.1 Lad os betragte en styret tank, hvor de to tilstrøminger F1(t) og F2(t) medkon entrationerne c1(t) og c2(t) bliver blandet i en tank. Det antages at blandingen er ideel og at
c, F = k
q
VA
c1
F1 F2
c2
V , cFigur 1.2. En styret tankudløbet fra tanken, F (t), har kon entrationen c(t). Opstilles massebalan en for systemet gælder derat:dV (t)
dt= V (t) = F1(t) + F2(t) − F (t) (1.2)
d
dt(c(t)V (t)) = c1(t)F1(t) + c2(t)F2(t) − c(t)F (t) (1.3)Udstrømningen fra tanken antages at følge blændeudtrykket:
F (t) = k√
h = k
r
V (t)
A(1.4)
23hvor h er væskestanden i tanken og hvor A er tankens tværsnitsareal. Til at karakterisere systemetstilstand vælges her tankvolumen (eller rettere det af væsken optagne volumen) V (t) og tankkon- entrationen c(t). Systemet påvirkes gennem variationerne i indstrømninger samt af variationer iindløbskon entrationerne. Da nu:d
dt(c(t)V (t)) =
dc(t)
dtV (t) + c(t)
dV (t)
dt(1.5)kan beskrivelsen let bringes på formen (1.1) dvs.:
V (t) = F1(t) + F2(t) − k
r
V (t)
A(1.6)
c(t) = (c1 − c(t))F1
V (t)+ (c2 − c(t))
F2
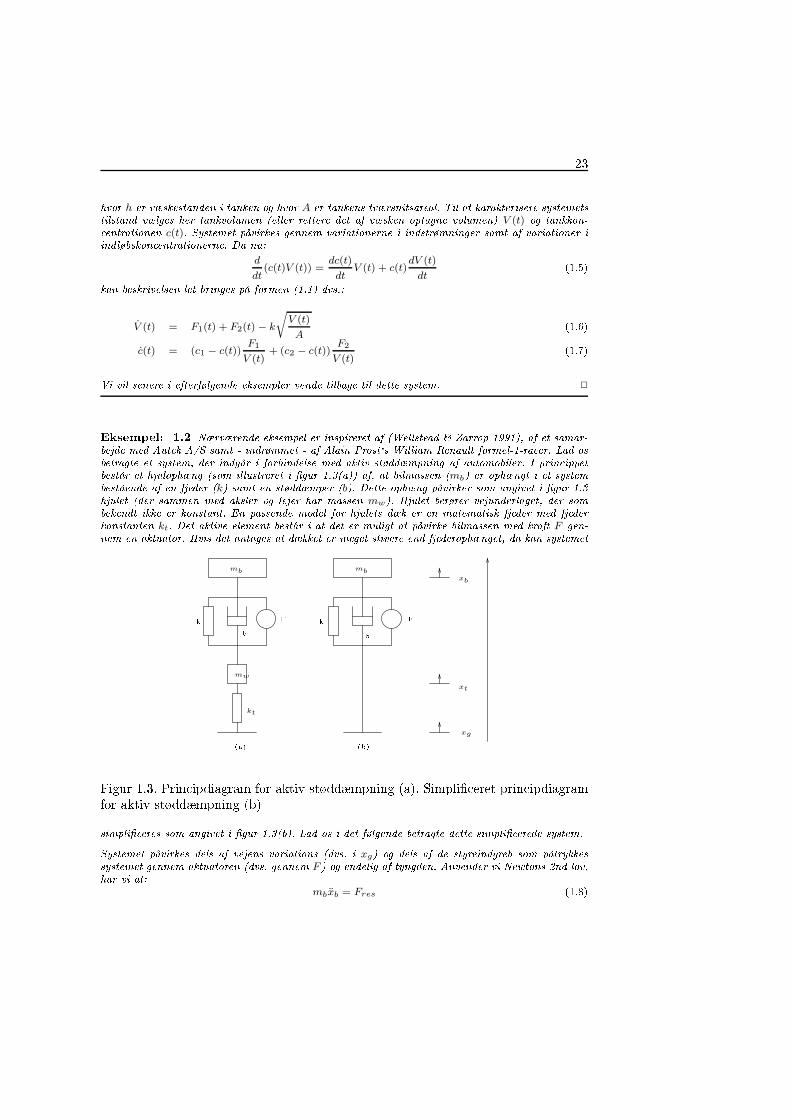
V (t)(1.7)Vi vil senere i efterfølgende eksempler vende tilbage til dette system. 2Eksempel: 1.2 Nærværende eksempel er inspireret af (Wellstead & Zarrop 1991), af et samar-bejde med Autek A/S samt - indrømmet - af Alain Prost`s William Renault formel-1-ra er. Lad osbetragte et system, der indgår i forbindelse med aktiv støddæmpning af automobiler. I prin ippetbestår et hjulophæng (som illustreret i gur 1.3(a)) af, at bilmassen (mb) er ophængt i et systembestående af en fjeder (k) samt en støddæmper (b). Dette ophæng påvirker som angivet i gur 1.3hjulet (der sammen med aksler og lejer har massen mw). Hjulet berører vejunderlaget, der sombekendt ikke er konstant. En passende model for hjulets dæk er en matematisk fjeder med fjederkonstanten kt. Det aktive element består i at det er muligt at påvirke bilmassen med kraft F gen-nem en aktuator. Hvis det antages at dækket er meget stivere end fjederophænget, da kan systemet
(a)k b Fmb
xb
xg
mbk b Fkt
xt
mw (b)Figur 1.3. Prin ipdiagram for aktiv støddæmpning (a). Simpli eret prin ipdiagramfor aktiv støddæmpning (b)simpli eres som angivet i gur 1.3(b). Lad os i det følgende betragte dette simpli erede system.Systemet påvirkes dels af vejens variations (dvs. i xg) og dels af de styreindgreb som påtrykkessystemet gennem aktuatoren (dvs. gennem F ) og endelig af tyngden. Anvender vi Newtons 2nd lov,har vi at:mbxb = Fres (1.8)

24 1.1 Systemrepræsentationmb = 275 b=657 k=9810l0 = 0.75 xg = 0 xb = 0.475Tabel 1.1. Numeriske værdier for eksempel 1.2 for F0 = 0.hvor Fres er den resulterende kraft virkende på bilens karosseri. Deformationen af fjedersystemeter xb − xg − l0 hvor l0 er egenlængden af hele ophænget (eller den ubelastede fjederlængde). Denresulterende kraft består da af følgende bidrag:
Fres = F aktuatorpåvirkning−mbg tyngdevirkning−k(xb − xg − l0) fjederkraften−b(xb − xg) dæmpninghvorved
mbxb + bxb + kxb = F − mbg + bxg + k(xg + l0) (1.9)Det ses heraf, at hvis den påvirkende kraft er konstant lig F0 og hvis vejbanens position er konstantxg = xg, da vil (for de i tabel 1.1 angivne systemparametre) vognens position xb asymptotisk nærmesig værdien:
xb =F0 − mbg
k+ xg + l0 (1.10)Vi vælger derfor at beskrive systemet og dets afvigelser fra denne stationære tilstand, dvs. viindfører størrelserne zb og zg hvor:
zb = xb − xb F = F0 + k1u xg = xg + zg (1.11)(her er F0 og xg af os valgte konstanter, mens xb er givet ved (1.10)). Størrelsen k1 er en forstærk-ning i aktuatoren. Den er i dette eksempel valgt til at være lig k, hvorved en DC-forstærkning (på1) gennem systemet er sikret. Dermed kan systemet beskrives ved:
mbzb + bzb + kzb = k1u + bzg + kzg (1.12)Det antages nu (lidt urealistisk), at vejbanen er helt jævn, dvs, zg = zg = 0. Til beskrivelse afsystemets tilstand vælges her:x1 = zb x2 = zb x =
„
x1
x2
« (1.13)Dermed er:x1 = zb = x2 (1.14)x2 = zb = − k
mb
zb − b
mb
zb +k1
mb
u (1.15)= − k
mb
x1 − b
mb
x2 +k1
mb
u (1.16)hvilket samlet kan angives på formen (1.1), dvs. på formen:x =
0 1
− kmb
− bmb
!
x +
0k1mb
!
u (1.17)Bemærk, at denne beskrivelse er på formen, (1.1). 2

25I forbindelse med regulering optræder ere kategorier af systemer. Umiddelbart eksistererder klassen af systemer, der er egentlige regulerings objekter. Dvs. de dynamiske systemerder bliver udsat for en styring eller en regulering. Regulatoren er imidlertid også et systemmed indgange, udgange og interne tilstande. Lukketsløjfe systemet, bestående af regulator ogreguleringsobjekt er også et system. I visse tilfælde dimensioneres regulatoren således at denlukkede sløjfe er et system med en ganske bestemte egenskaber. Der tales i den forbindelseom et referen esystem eller referen emodel. Filtre og aktuatorer er andre eksempler pådynamiske systemer.For at kontrollere eller overvåge visse af systemets størrelser er det strategisk rigtigt atpla ere sensorer, der registrerer størrelser, der er relateret til systemets tilstande. Dissemålinger, y(t), er relateret til systemets tilstande.y(t) = g(x(t), u(t), t) (1.18)Man betegner ovenstående (1.1), (1.18) som en intern beskrivelse, idet den angiver hvorledesde interne tilstandsvariable udvikler sig og hvorledes de kommunikerer med omgivelserne.Dette er i modsætning til beskrivelser, hvor det kun er den dynamiske sammenhæng mellempåvirkninger, u(t), og udgang, y(t), der beskrives.Bemærk, at systemets tilstandsvariable, x(t), for t ≥ t0 både afhænger af styresignalet,
u(t), t ≥ t0, og af initialtilstanden, x0. Systemets forhistorie (påvirkninger, u(t) for t < t0)er således samlet i initialtilstanden, x0. Dette kan anvendes som en denition af et systemetstilstandsvariable, nemlig som den information om systemets forhistorie som behøves for atforudsige systemets fortsatte opførsel.Det bemærkes at ovenstående beskrivelse, (1.1) og (1.18), er en beskrivelse ved hjælp afordinære dierentialligninger (ODE, Ordinary Dierential Equation). Dette betyder spe ieltat beskrivelsen er af endelig orden (dvs. vektoren x(t) har et endeligt antal elementer).En mere detaljeret beskrivelse af mange tekniske systemer vil ofte kræve en beskrivelsemed partielle dierentialligninger (PDE, Partial Dierential Equation). Ved at anvende enbeskrivelse af ODE typen, der har en endelig orden, har vi således i visse tilfælde valgtat anvende en approximation. Relevansen af en sådan approximation skal naturligvis ses irelation til den konkrete anvendelse. Som et typisk eksempel på et system med en beskrivelseaf uendelig orden kan nævnes den i tekniske sammenhænge ret relevante tidsforsinkelse, derhar overføringsfunktionen e−sTd . I kontinuert tid vil en tidsforsinkelse give anledning til enbeskrivelse af uendelig orden. I diskret tid optræde dette problem ikke fordi tidsforsinkelsener en naturlig operator (men mere herom i afsnit 1.3).I disse noter vil vi hovedsagelig beskæftige os med systemer, hvor f og g er lineære. Vi vilbetragte (endeligt dimensionale) lineære systemer med en beskrivelse på formen:x(t) = Ax(t) +Bu(t); x(t0) = x0 (1.19)y(t) = C
⊤x(t) +Du(t) (1.20)Hvis matri erne A,B,C og D er konstante betegnes systemet som tidsinvariant. Hvis syste-met er skalært, dvs. har en indgang og en udgang, da er B og C vektorer og D er en skalar.
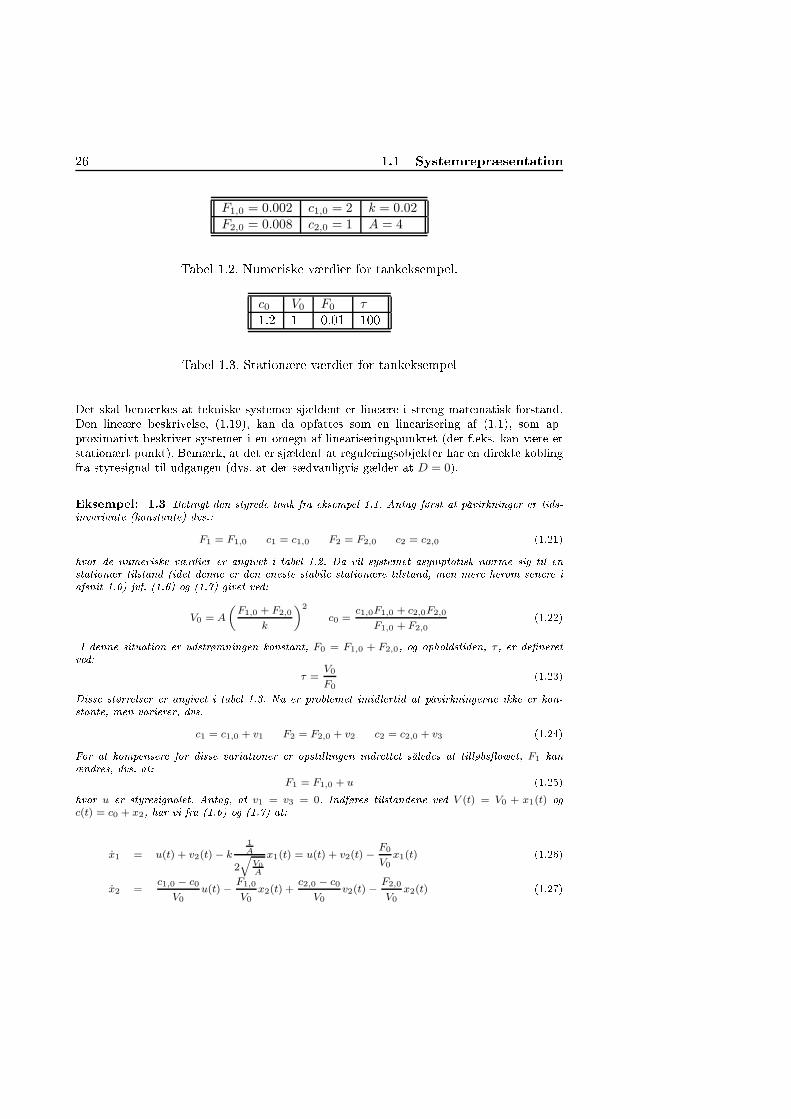
26 1.1 SystemrepræsentationF1,0 = 0.002 c1,0 = 2 k = 0.02F2,0 = 0.008 c2,0 = 1 A = 4Tabel 1.2. Numeriske værdier for tankeksempel.
c0 V0 F0 τ1.2 1 0.01 100Tabel 1.3. Stationære værdier for tankeksempelDet skal bemærkes at tekniske systemer sjældent er lineære i streng matematisk forstand.Den lineære beskrivelse, (1.19), kan da opfattes som en linearisering af (1.1), som ap-proximativt beskriver systemet i en omegn af lineariseringspunktet (der f.eks. kan være etstationært punkt). Bemærk, at det er sjældent at reguleringsobjekter har en direkte koblingfra styresignal til udgangen (dvs. at der sædvanligvis gælder at D = 0).Eksempel: 1.3 Betragt den styrede tank fra eksempel 1.1. Antag først at påvirkninger er tids-invariante (konstante) dvs.:F1 = F1,0 c1 = c1,0 F2 = F2,0 c2 = c2,0 (1.21)hvor de numeriske værdier er angivet i tabel 1.2. Da vil systemet asymptotisk nærme sig til enstationær tilstand (idet denne er den eneste stabile stationære tilstand, men mere herom senere iafsnit 1.6) jvf. (1.6) og (1.7) givet ved:
V0 = A
„
F1,0 + F2,0
k
«2
c0 =c1,0F1,0 + c2,0F2,0
F1,0 + F2,0(1.22)I denne situation er udstrømningen konstant, F0 = F1,0 + F2,0, og opholdstiden, τ , er deneretved:
τ =V0
F0(1.23)Disse størrelser er angivet i tabel 1.3. Nu er problemet imidlertid at påvirkningerne ikke er kon-stante, men varierer, dvs.
c1 = c1,0 + v1 F2 = F2,0 + v2 c2 = c2,0 + v3 (1.24)For at kompensere for disse variationer er opstillingen indrettet således at tilløbsowet, F1 kanændres, dvs. at:F1 = F1,0 + u (1.25)hvor u er styresignalet. Antag, at v1 = v3 = 0. Indføres tilstandene ved V (t) = V0 + x1(t) og
c(t) = c0 + x2, har vi fra (1.6) og (1.7) at:x1 = u(t) + v2(t) − k
1A
2q
V0A
x1(t) = u(t) + v2(t) −F0
V0x1(t) (1.26)
x2 =c1,0 − c0
V0u(t) − F1,0
V0x2(t) +
c2,0 − c0
V0v2(t) − F2,0
V0x2(t) (1.27)
27Vi har da under antagelse af variationerne er små den approximative beskrivelse:x1 = u(t) + v2(t) − 1
2τx1(t) (1.28)
x2 =c1,0 − c0
V0u(t) − 1
τx2(t) +
c1,0 − c0
V0v2(t) (1.29)der på kompakt form er:
x =
„
− 12τ
0
0 − 1τ
«
x(t) +
1c1,0−c0
V0
!
u(t) +
1c2,0−c0
V0
!
v2(t) (1.30)2Eksempel: 1.4 Betragt den styrede tank fra eksempel 1.3. Antag, at opgaven består i at redu ereforstyrrelsernes indydelse på kon entrationen, c(t), i udløbet. Dvs. at systemets udgang er c(t) ogsystemets samlede beskrivelse er:
x =
„
− 12τ
0
0 − 1τ
«
x(t) +
1c1,0−c0
V0
!
u(t) (1.31)+
1c2,0−c0
V0
!
v2(t) (1.32)y(t) =
`
0 1´
x(t) (1.33)2Eksempel: 1.5 Lad os vende tilbage til eksempel 1.2. Formålet med en aktiv støddæmpning er atdæmpe påvirkningerne fra vejunderlagets ujævnheder eller formuleret anderledes at holde vognenshøjde over vejen så konstant som mulig. En varierende vognhøjde vil være ubehagelig, men vigtigereer at vognens vejgreb dermed forringes. Hvis dækkenes tryk mod vejen kommer under en bestemtgrænse mister dækkene vejgrebet.Antag derfor at der på vognen er pla eret en sensor, der er i stand til at måle afvigelsen mellemvognens højde xb og xb, dvs. målingen y = x1. System kan altså beskrives som i (1.18) med:
x =
0 1
− kmb
− bmb
!
x +
0k1mb
!
u (1.34)y =
`
1 0´
x (1.35)2Eksempel: 1.6 Betragt forholdene i eksempel 1.2 og 1.5. Antag at sensoren, der er pla eret påvognen er et a elerometer, der måler zb. Fra eksempel 1.2 har vi at:
y = zb = − k
mb
x1 − b
mb
x2 +k1
mb
u (1.36)
28 1.1 SystemrepræsentationSystemet kan altså dette tilfælde beskrives som i (1.18) med:x =
0 1
− kmb
− bmb
!
x +
0k1mb
!
u (1.37)y =
“
− kmb
− bmb
”
x +k1
mb
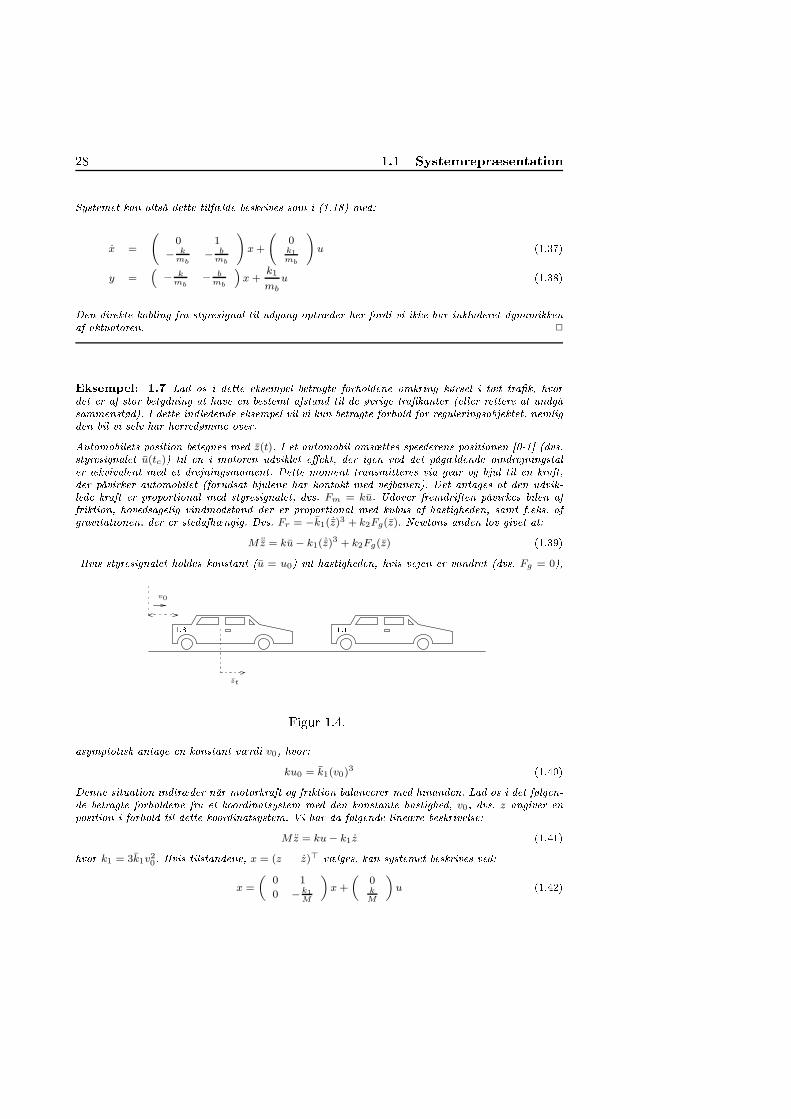
u (1.38)Den direkte kobling fra styresignal til udgang optræder her fordi vi ikke har inkluderet dynamikkenaf aktuatoren. 2Eksempel: 1.7 Lad os i dette eksempel betragte forholdene omkring kørsel i tæt trak, hvordet er af stor betydning at have en bestemt afstand til de øvrige trakanter (eller rettere at undgåsammenstød). I dette indledende eksempel vil vi kun betragte forhold for reguleringsobjektet, nemligden bil vi selv har herredømme over.Automobilets position betegnes med z(t). I et automobil omsættes speederens positionen [0-1 (dvs.styresignalet u(tc)) til en i motoren udviklet eekt, der igen ved det pågældende omdrejningstaler ækvivalent med et drejningsmoment. Dette moment transmitteres via gear og hjul til en kraft,der påvirker automobilet (forudsat hjulene har kontakt med vejbanen). Det antages at den udvik-lede kraft er proportional med styresignalet, dvs. Fm = ku. Udover fremdriften påvirkes bilen affriktion, hovedsagelig vindmodstand der er proportional med kubus af hastigheden, samt f.eks. afgravitationen, der er stedafhængig. Dvs. Fr = −k1( ˙z)3 + k2Fg(z). Newtons anden lov givet at:M ¨z = ku − k1( ˙z)3 + k2Fg(z) (1.39)Hvis styresignalet holdes konstant (u = u0) vil hastigheden, hvis vejen er vandret (dvs. Fg = 0),1.1
zt
v0 1.8Figur 1.4.asymptotisk antage en konstant værdi v0, hvor:
ku0 = k1(v0)3 (1.40)Denne situation indtræder når motorkraft og friktion balan erer med hinanden. Lad os i det følgen-de betragte forholdene fra et koordinatsystem med den konstante hastighed, v0, dvs. z angiver enposition i forhold til dette koordinatsystem. Vi har da følgende lineære beskrivelse:Mz = ku − k1z (1.41)hvor k1 = 3k1v2
0. Hvis tilstandene, x = (z z)⊤ vælges, kan systemet beskrives ved:x =
„
0 1
0 − k1M
«
x +
„
0kM
«
u (1.42)

29τ κ κv100 80 -20Tabel 1.4. Parametre i den eksterne beskrivelse af tanksystem
y =`
1 0´
x (1.43)For værdierne M = 1100kg, k = 1.63× 104 og k1 = 90.5 (svarende til en tophastighed på 180 km/hog en a eleration fra 0-100 km/h på 10.8 sek) er beskrivelsen givet ved:»
A BC⊤ D
–
=
2
4
0 3.6 | 00 −8.23 × 10−2 | 14.81 0 | 0
3
5 (1.44)2Ved at eliminere x(t) i (1.19), kan vi få en ekstern beskrivelse eller model for systemet,nemlig en dierentialligning af formen:
dn
dtny(t) + a1
dn−1
dtn−1y(t) + ...+ any(t) = b0
dn
dtnu(t) + ... + bnu(t) (1.45)Denne dierentialligning sammenknytter kun dynamiske egenskaber mellem styre- og ud-gangssignaler. Denne beskrivelse betegnes som en ekstern beskrivelse, fordi den ikke inde-holder information om de interne pro esser.Eksempel: 1.8 Betragt den styrede tank fra eksempel 1.4. Med anvendelse af at udgangen y(t) =
x2(t) kan vi let bestemme en ekstern beskrivelse af systemet. Ud fra systembeskrivelsen (1.32) og(1.33) er:y = − 1
τy(t) +
c1,0 − c0
V0u(t) +
c2,0 − c0
V0v2(t) (1.46)eller:
y(t) + τ y(t) = κu(t) + κvv2(t) (1.47)hvor:κ = τ
c1,0 − c0
V0κv = τ
c2,0 − c0
V0(1.48)der er angivet i tabel 1.8. Bemærk, at systembeskrivelsen (1.47) kun er af første orden, mensden oprindelige interne beskrivelse (1.32) og (1.33) er af anden orden. Dette skyldes at (1.32) og(1.33) ikke er en minimal repræsentation for den eksterne beskrivelse (1.47), men som tilgengældindeholder information om dynamikken for V (t). 2Eksempel: 1.9 Betragt igen forholdene i eksempel 1.2 og 1.5. Vi vil i dette eksempel illustrerehvordan vi direkte kan eliminere systemtilstanden, og beskrive den dynamiske sammenhæng mellemind- og udgang. Matlab routinen ss2tf omsætter generelt en intern beskrivelse dvs. en tilstands-beskrivelse til en ekstern beskrivelse dvs. en overføringsfunktion. Fra eksempel 1.5 har vi direkteat:
x1 = x2 (1.49)x2 = − k
mb
x1 − b
mb
x2 +k1
mb
u (1.50)y = x1 (1.51)
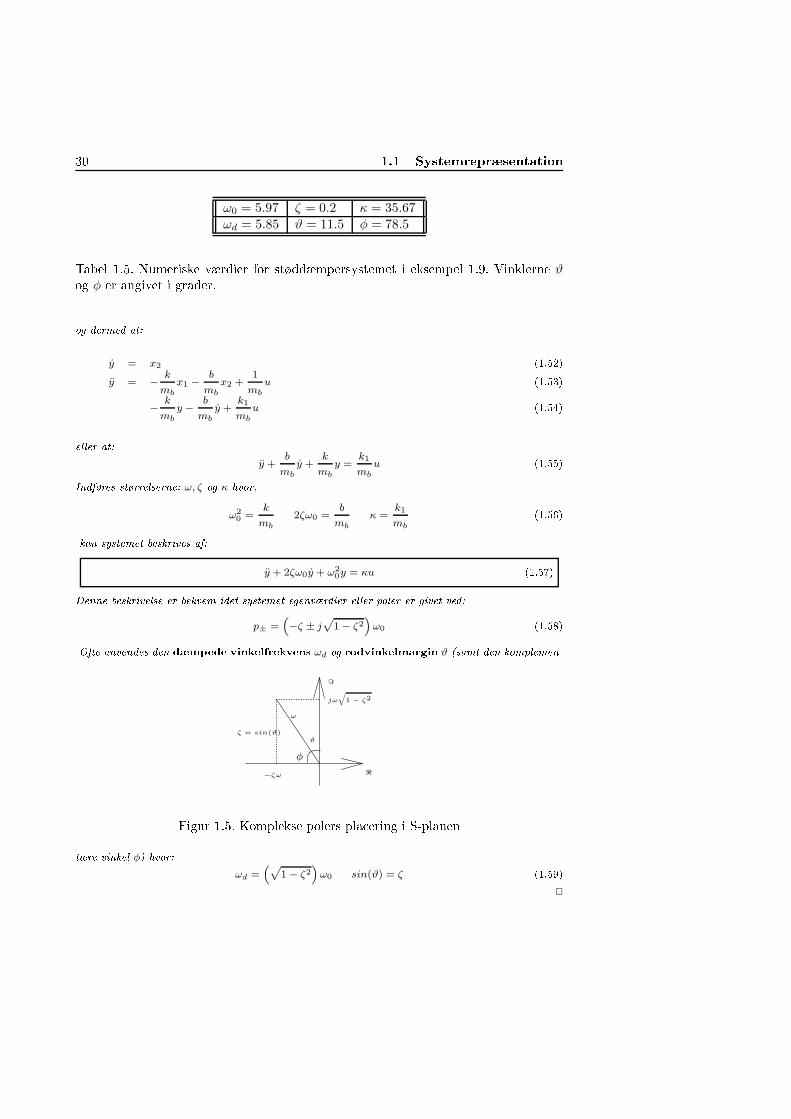
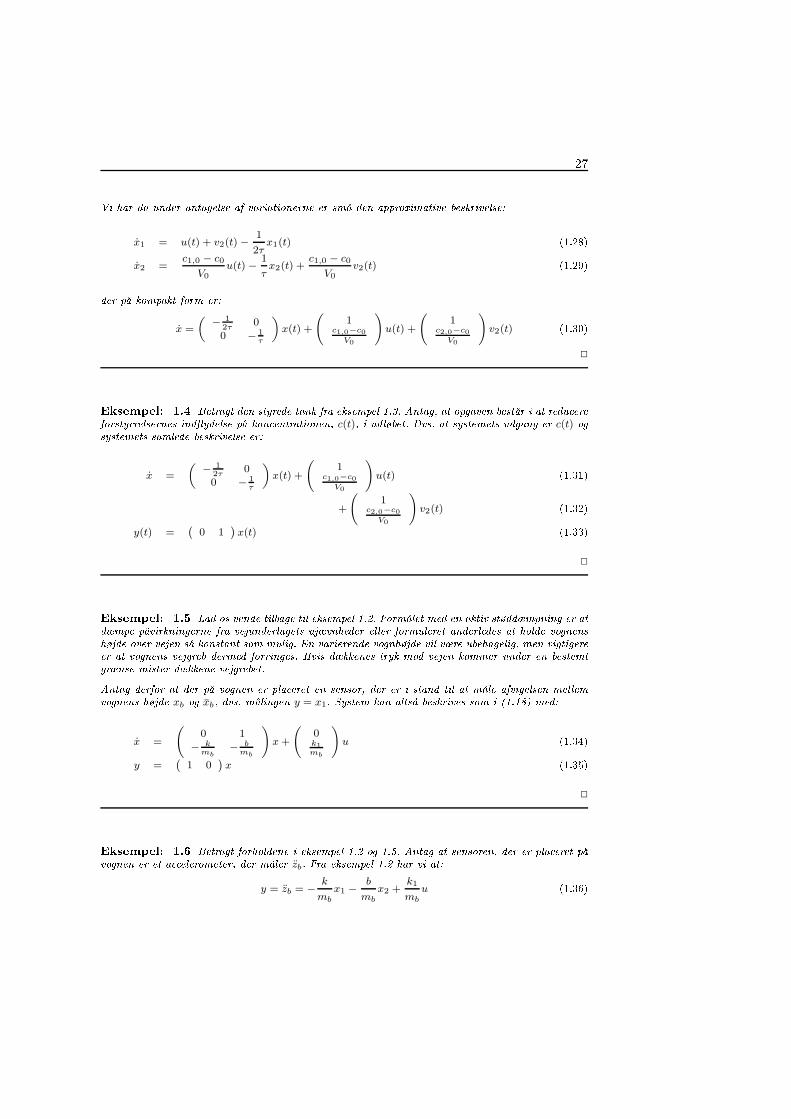
30 1.1 Systemrepræsentationω0 = 5.97 ζ = 0.2 κ = 35.67ωd = 5.85 ϑ = 11.5 φ = 78.5Tabel 1.5. Numeriske værdier for støddæmpersystemet i eksempel 1.9. Vinklerne ϑog φ er angivet i grader.og dermed at:
y = x2 (1.52)y = − k
mb
x1 − b
mb
x2 +1
mb
u (1.53)− k
mb
y − b
mb
y +k1
mb
u (1.54)eller at:y +
b
mb
y +k
mb
y =k1
mb
u (1.55)Indføres størrelserne: ω, ζ og κ hvor,ω2
0 =k
mb
2ζω0 =b
mb
κ =k1
mb
(1.56)kan systemet beskrives af:y + 2ζω0y + ω2
0y = κu (1.57)Denne beskrivelse er bekvem idet systemet egenværdier eller poler er givet ved:p± =
“
−ζ ± jp
1 − ζ2”
ω0 (1.58)Ofte anvendes den dæmpede vinkelfrekvens ωd og rodvinkelmargin ϑ (samt den komplemen-ζ = sin(ϑ)
ℑ
φ
jω
q
1 − ζ2
ω
ϑ
ℜ−ζωFigur 1.5. Komplekse polers pla ering i S-planentære vinkel φ) hvor:ωd =
“
p
1 − ζ2”
ω0 sin(ϑ) = ζ (1.59)2

31-15 -10 -5 0
-10
-8
-6
-4
-2
0
2
4
6
8
10
Figur 1.6. Pla ering af poler for støddæmpersystem (1.57).Det kan vises (se f.eks. (Kwakernaak & Sivan 1972) side 12), at den analytiske løsning tilligningen (1.19) er givet ved:x(t) = e
A(t−t0)x(t0) +
Z t
t0
eA(t−s)
Bu(s)ds (1.60)hvor eksponentialfunktionen af en matrix, M , er (under forudsætning af at rækken er kon-vergent) deneret ved sin rækkeudviklinge
M =∞X
k=0
1
k!M
k = I +M +1
2M
2 + ... (1.61)(der eksister en lang række numeriske metoder og matematiske teknikker til beregning afmatrixexponentialfunktionen). t0 angiver initialtidspunktet. I umiddelbar forlængelse herafhar vi for udgangen at:y(t) = C
⊤x(t) +Du(t) (1.62)
= C⊤e
A(t−t0)x(t0) +
Z t
t0
C⊤e
A(t−s)Bu(s)ds+Du(t) (1.63)Af ovenstående ses at et systems impulsrespons (dvs. y(t) for u(t) = δ(t) og x(t0) = 0) ergivet ved:
h(t) =
C⊤eAtB +Dδ t ≥ 00 t < 0
(1.64)At et system er kausalt betyder, at en respons ikke tidsmæssigt optræder før en påvirk-ning (at påvirkningen er årsag til responsen og ikke omvendt). Dette betyder spe ielt forimpulsresponsen, at h(t) = 0 for t < 0.Eksempel: 1.10 En måde at karakterisere et dynamisk system er at angive dets impulsrespons,dvs. (1.64). Imidlertid er det sædvanligvis integralet heraf, nemlig trinresponset, der angives. Dettehænger bl.a. sammen med at det eksperimentelt er langt enklere at udføre en trinpåvirkning af etdynamisk system. I gur 1.7 er tanksystemets og støddæmpersystemets trinrespons angivet. 2
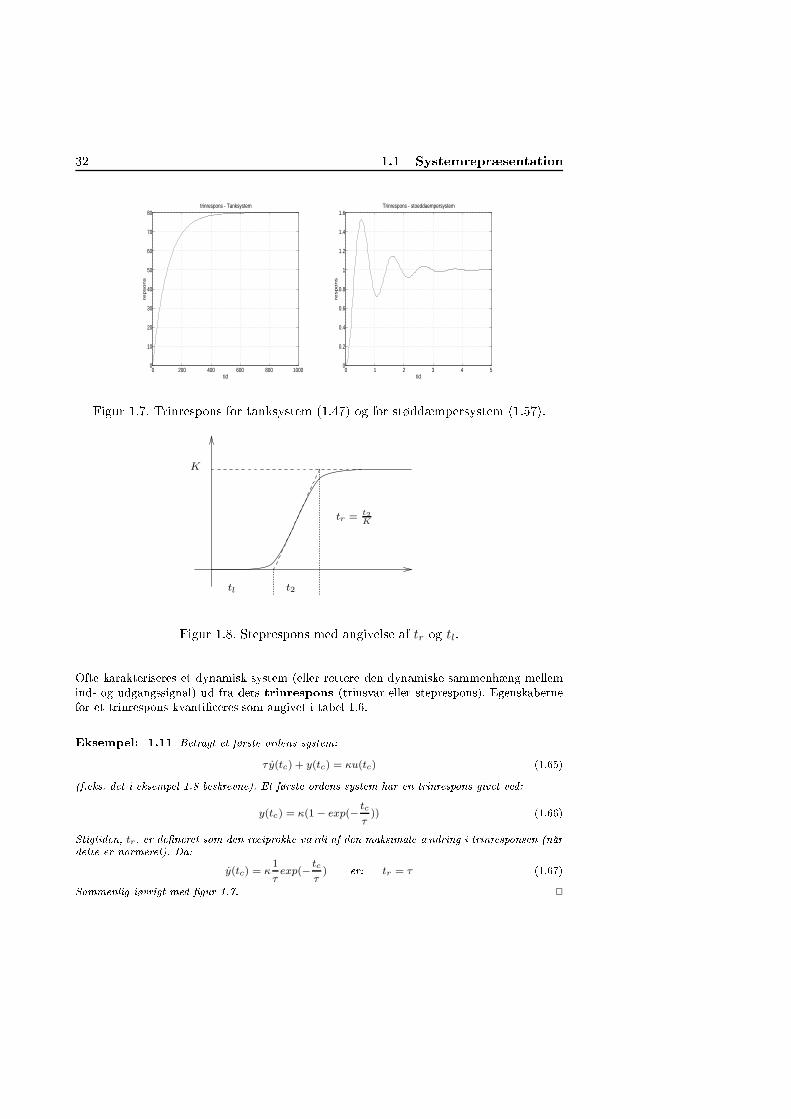
32 1.1 Systemrepræsentation
0 200 400 600 800 10000
10
20
30
40
50
60
70
80trinrespons - Tanksystem
rep
so
ns
tid0 1 2 3 4 5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Trinrespons - stoeddaempersystem
resp
on
s
tidFigur 1.7. Trinrespons for tanksystem (1.47) og for støddæmpersystem (1.57).tr = t2
K
K
tl t2Figur 1.8. Steprespons med angivelse af tr og tl.Ofte karakteriseres et dynamisk system (eller rettere den dynamiske sammenhæng mellemind- og udgangssignal) ud fra dets trinrespons (trinsvar eller steprespons). Egenskabernefor et trinrespons kvanti eres som angivet i tabel 1.6.Eksempel: 1.11 Betragt et første ordens system:τ y(tc) + y(tc) = κu(tc) (1.65)(f.eks. det i eksempel 1.8 beskrevne). Et første ordens system har en trinrespons givet ved:y(tc) = κ(1 − exp(− tc
τ)) (1.66)Stigtiden, tr, er deneret som den re iprokke værdi af den maksimale ændring i trinresponsen (nårdette er normeret). Da:
y(tc) = κ1
τexp(− tc
τ) er: tr = τ (1.67)Sammenlig iøvrigt med gur 1.7. 2

33Reaktionsrate r maximal rate normeret med responsensstationære værdiStigetid tr re iprok værdi af maximal reaktionsrate for en enheds påvirkning.Er ofte også deneret som perioden mellem 10% og 90%af stationær værdi.Reaktionstid tl periode til reaktionstangentens1 skæring aftidsaksen. Er ofte deneret som periode tilresponsen har antaget 10% af stationær værdiOpvoksningstid to periode til første gang stationær værdi antagespeak time tp periode til maksimalværdi antagesOversving mp maksimalværdi minus stationære værdiSetling time tset periode til trinresponsen er begrænsettil en omegn til ± 5% af stationær værdi.Tabel 1.6. Parametre til beskrivelse af trinrespons.Eksempel: 1.12 Betragt et anden ordens system:y(tc) + 2ζω0y(tc) + ω2
0y(tc) = ω20u(tc) (1.68)(f.eks. fra eksempel 1.9 med en forstærkning der er justeret således DC-forstærkningen er 1). Trin-responsen kan let ndes (f.eks. ved anvendelse af Lapla eteknikken, se f.eks. appendix A). Medstørrelserne:
tan(φ) =
p
1 − ζ2
ζζ = cos(φ) (1.69)fra eksempel 1.9 (se f.eks. gur 1.5) kan vi jvf. appendix H bestemme stigtiden, tr , til at være:
tr =
p
1 − ζ2
ω0eζω0tm
1
sin(ωdtm)(1.70)
=1
ω0
p
1 − ζ2
ζ
cos(φ)
sin(φ)exp
ζp
1 − ζ2φ
! (1.71)=
1
ω0exp
„
φ
tan(φ)
« (1.72)2Hvis t0 → −∞ kan vi under passende forudsætninger (systemet er asymptotisk stabilt) udfra (1.64) skrive at:
y(t) =
Z ∞
−∞h(t− s)u(s)ds =
Z ∞
−∞h(s)u(t− s)ds (1.73)eller at udgangen er en foldning mellem systemets impulsrespons og påvirkningen. Det kanogså fortolkes som at udgangen er en vægtet sum (integral) af historiske påvirkninger. Im-pulssvaret betegnes også som systemets vægtfunktion af ovennævnte årsag.1tangent gennem punkt hvor maximal rate indtræder

34 1.1 SystemrepræsentationVi vil ofte være interesseret i at angive frekvensindholdet i et signal, og spe ielt hvorledesfrekvensindholdet af udgangen er relateret til systemets egenskaber og frekvensindholdet iindgangs- eller styresignal. Når vi taler om lineære tidsinvariante dynamiske systemer, da erdet netop en systemegenskab (dvs. afhænger kun af systemet), hvorledes systemet transfor-merer de enkelte frekvenser. Dette er i modsætning til ulineære systemer, hvor forstærknin-gen både afhænger af system og påvirkning. Idet udgangen er en foldning mellem styresignalog systemets impulsrespons, da følger det af egenskaberne for Fouriertransformationen, at:y(ω) = HF (ω)u(ω) (1.74)hvor y(ω), u(ω) og HF (ω) er de fouriertransformerede af y(t), u(t) og h(t), henholdsvis.(Bemærk, den sædvanlige, men noget ustringente notation). Det vil f.eks. sige at:HF (ω) = F(h(t)) (1.75)Det følger direkte af egenskaberne for Fouriertransformationen at HF (ω) kan ndes fra deninterne (1.19), henholdsvis den eksterne beskrivelse, (1.45), ved:
HF (ω) = C⊤(jωI − A)−1
B +D =b0(jω)n + b1(jω)n−1 + ...+ bn
(jω)n + a1(jω)n−1 + ...+ an
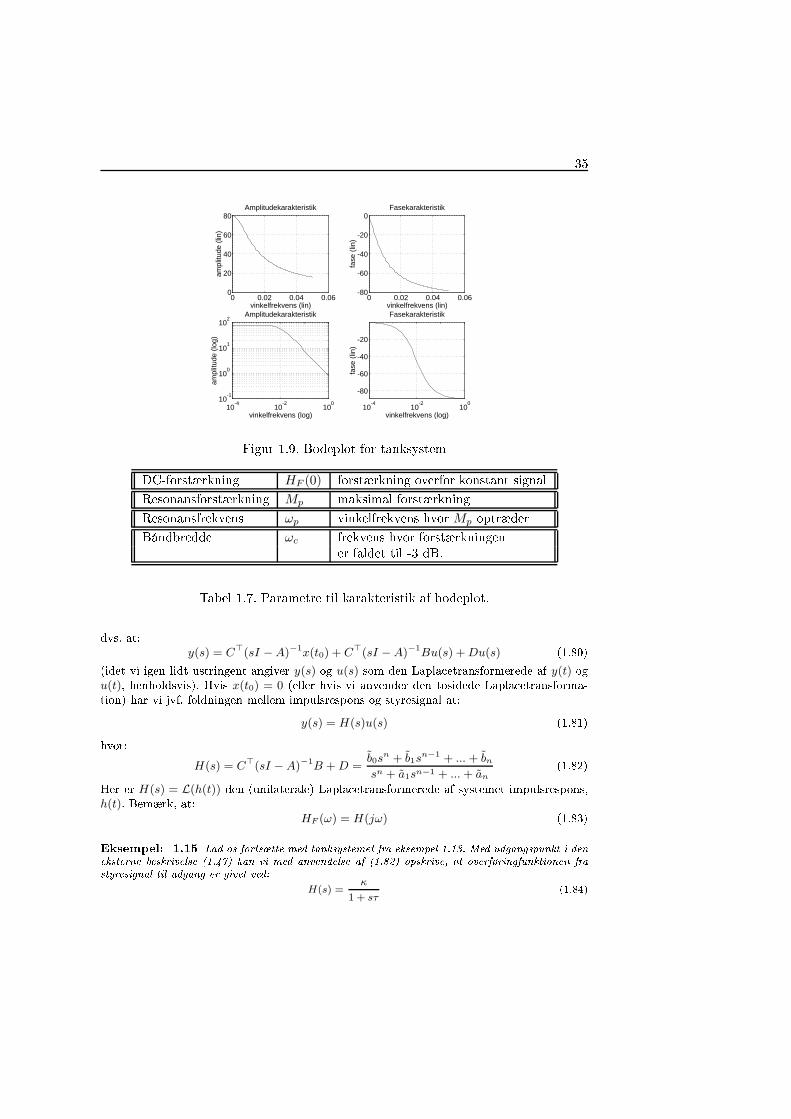
(1.76)Et (tidsinvariant, lineært) dynamisk system karakteriseres derfor ofte grask ved, hvorledesden komplekse størrelse, HF (ω) afhænger af frekvensen eller vinkelfrekvensen. Et Bodeplotbestår af en grask afbildning af amplituden (modus afHF ) og fasedrejningen (argumentet afHF ). I frekvensanalytisk sammenhæng karakteriseres et dynamisk system af et sæt nøgletalsom angivet i tabel 1.7.Eksempel: 1.13 Lad os fortsætte eksempel 1.8. Fra (1.76) og (1.47) har vi at:
HF (ω) =κ
1 + jωτ(1.77)der er angivet i gur 1.9 i både lineær og logaritmisk skala. 2Eksempel: 1.14 Lad os fortsætte eksempel 1.9 og bestemme Fouriertransformationen HF (ω).Ved at kombinere (1.57) med (1.76) nder vi at:
HF (ω) =κ
ω20 + 2jζω0ω − ω2
(1.78)Bodeplottet for støddæmpersystemet er angivet i gur 1.10. 2En anden meget vigtig transformation er Lapla etransformation. Denne eksister både i bi-lateral og en unilateral version. Forholdene for den tosidede Lapla etransformation er stortset identiske med Fouriertransformation, blot er jω (formelt) erstattet af den kompleksefrekvens s = σ + jω. Hvis vi benytter (den unilaterale) Lapla etransformation gælder derat:sx(s) − x(t0) = Ax(s) +Bu(s) (1.79)
350 0.02 0.04 0.06
0
20
40
60
80Amplitudekarakteristik
vinkelfrekvens (lin)
ampl
itude
(lin
)
0 0.02 0.04 0.06-80
-60
-40
-20
0Fasekarakteristik
vinkelfrekvens (lin)
fase
(lin
)
10-4
10-2
100
10-1
100
101
102
Amplitudekarakteristik
vinkelfrekvens (log)
ampl
itude
(lo
g)
10-4
10-2
100
-80
-60
-40
-20
Fasekarakteristik
vinkelfrekvens (log)
fase
(lin
)
Figur 1.9. Bodeplot for tanksystemDC-forstærkning HF (0) forstærkning overfor konstant signalResonansforstærkning Mp maksimal forstærkningResonansfrekvens ωp vinkelfrekvens hvor Mp optræderBåndbredde ωc frekvens hvor forstærkningener faldet til -3 dB.Tabel 1.7. Parametre til karakteristik af bodeplot.dvs. at:y(s) = C
⊤(sI −A)−1x(t0) + C
⊤(sI − A)−1Bu(s) +Du(s) (1.80)(idet vi igen lidt ustringent angiver y(s) og u(s) som den Lapla etransformerede af y(t) og
u(t), henholdsvis). Hvis x(t0) = 0 (eller hvis vi anvender den tosidede Lapla etransforma-tion) har vi jvf. foldningen mellem impulsrespons og styresignal at:y(s) = H(s)u(s) (1.81)hvor:
H(s) = C⊤(sI − A)−1
B +D =b0s
n + b1sn−1 + ...+ bn
sn + a1sn−1 + ...+ an
(1.82)Her er H(s) = L(h(t)) den (unilaterale) Lapla etransformerede af systemet impulsrespons,h(t). Bemærk, at:
HF (ω) = H(jω) (1.83)Eksempel: 1.15 Lad os fortsætte med tanksystemet fra eksempel 1.13. Med udgangspunkt i deneksterne beskrivelse (1.47) kan vi med anvendelse af (1.82) opskrive, at overføringfunktionen frastyresignal til udgang er givet ved:H(s) =
κ
1 + sτ(1.84)
36 1.2 Sampling.
10-2
100
102
10-3
10-2
10-1
100
101
Amplitudeforst.
mag
vinkelfrekvens10
-210
010
2
-160
-140
-120
-100
-80
-60
-40
-20
Fasedrejning
phas
e
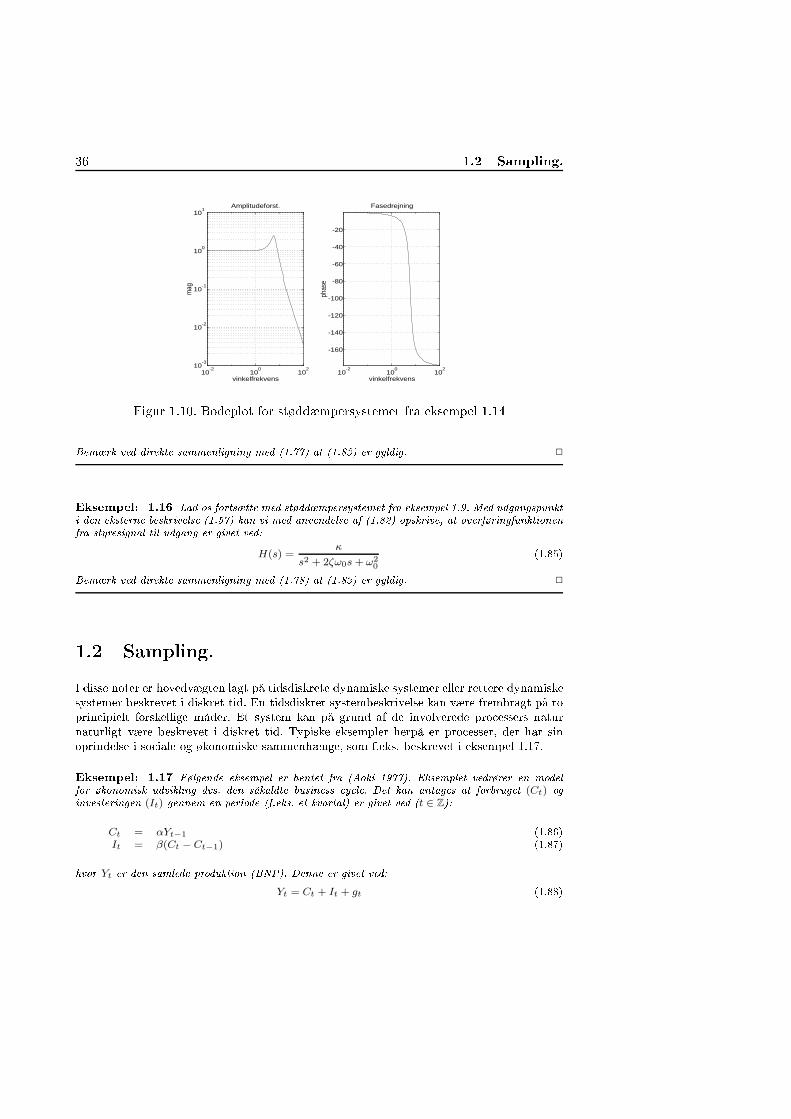
vinkelfrekvensFigur 1.10. Bodeplot for støddæmpersystemet fra eksempel 1.14Bemærk ved direkte sammenligning med (1.77) at (1.83) er gyldig. 2Eksempel: 1.16 Lad os fortsætte med støddæmpersystemet fra eksempel 1.9. Med udgangspunkti den eksterne beskrivelse (1.57) kan vi med anvendelse af (1.82) opskrive, at overføringfunktionenfra styresignal til udgang er givet ved:H(s) =
κ
s2 + 2ζω0s + ω20
(1.85)Bemærk ved direkte sammenligning med (1.78) at (1.83) er gyldig. 21.2 Sampling.I disse noter er hovedvægten lagt på tidsdiskrete dynamiske systemer eller rettere dynamiskesystemer beskrevet i diskret tid. En tidsdiskret systembeskrivelse kan være frembragt på toprin ipielt forskellige måder. Et system kan på grund af de involverede pro essers naturnaturligt være beskrevet i diskret tid. Typiske eksempler herpå er pro esser, der har sinoprindelse i so iale og økonomiske sammenhænge, som f.eks. beskrevet i eksempel 1.17.Eksempel: 1.17 Følgende eksempel er hentet fra (Aoki 1977). Eksemplet vedrører en modelfor økonomisk udvikling dvs. den såkaldte business y le. Det kan antages at forbruget (Ct) oginvesteringen (It) gennem en periode (f.eks. et kvartal) er givet ved (t ∈ Z):Ct = αYt−1 (1.86)It = β(Ct − Ct−1) (1.87)hvor Yt er den samlede produktion (BNP). Denne er givet ved:
Yt = Ct + It + gt (1.88)
1.2.1 Sampling af tidskontinuert signal 37hvor gt er oentlige udgifter i den pågældende periode. Indføres en tilstandsvektor med:xt =
»
Yt
Ct
– (1.89)kan dette system beskrives ved den interne beskrivelse:xt+1 =
»
α(1 + β) −βα 0
–
xt +
»
10
–
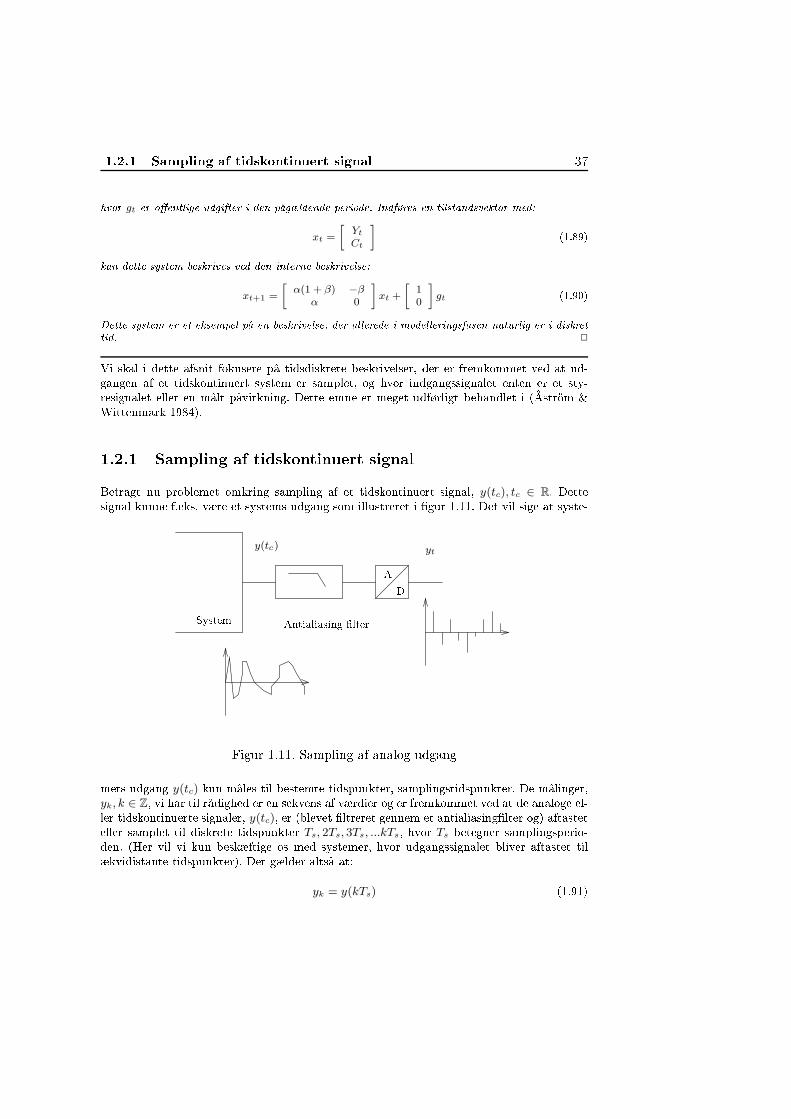
gt (1.90)Dette system er et eksempel på en beskrivelse, der allerede i modelleringsfasen naturlig er i diskrettid. 2Vi skal i dette afsnit fokusere på tidsdiskrete beskrivelser, der er fremkommet ved at ud-gangen af et tidskontinuert system er samplet, og hvor indgangssignalet enten er et sty-resignalet eller en målt påvirkning. Dette emne er meget udførligt behandlet i (Åström &Wittenmark 1984).1.2.1 Sampling af tidskontinuert signalBetragt nu problemet omkring sampling af et tidskontinuert signal, y(tc), tc ∈ R. Dettesignal kunne f.eks. være et systems udgang som illustreret i gur 1.11. Det vil sige at syste-System Antialiasing lter D ytAy(tc)
Figur 1.11. Sampling af analog udgangmets udgang y(tc) kun måles til bestemte tidspunkter, samplingstidspunkter. De målinger,yk, k ∈ Z, vi har til rådighed er en sekvens af værdier og er fremkommet ved at de analoge el-ler tidskontinuerte signaler, y(tc), er (blevet ltreret gennem et antialiasinglter og) aftasteteller samplet til diskrete tidspunkter Ts, 2Ts, 3Ts, ...kTs, hvor Ts betegner samplingsperio-den. (Her vil vi kun beskæftige os med systemer, hvor udgangssignalet bliver aftastet tilækvidistante tidspunkter). Der gælder altså at:
yk = y(kTs) (1.91)

38 1.2 Sampling.Bemærk, at dynamikken i sensorer og ltre (hvis ikke den negligeres) henregnes til syste-mets totale dynamik. Der tales i den forbindelse om samplingsfrekvensen, fs, og samplings-vinkelfrekvensen, ωs, hvor:fs =
1
Ts
ωs =2π
Ts
(1.92)I forbindelse med sampling af tidskontinuerte signaler gælder en meget vigtig sætning; nemligShannon's sætning.Sætning: 1.1 (Shannon) Et tidskontinuert signal hvis fouriertransformerede er identisk nuludenfor intervallet [−ω0, ω0] er entydigt givet ved den samplede version såfremt ωs > 2ω0. Dettidskontinuerte signal, y(tc) kan bestemmes ud fra det samplede signal, yk, ud fra:y(tc) =
∞X
k=−∞yk
sinωs(tc−kTs)
2ωs(tc−kTs)
2
(1.93)2Bevis: se (Åström & Wittenmark 1984) side 22. 2Bemærk at en rekonstruktion af et tidskontinuert signal ud fra et samplet signal (dvs.tidsdiskret) efter (1.93) ikke egner sig til realtidsoperationer. I praktiske sammenhænge vilman ofte vælge at anvende et nulteordens holdenetværk evt. efterfulgt af en lavpasltrering.Eksempel: 1.18 Betragt en rent sinussignal, dvs.
y(tc) = Asin(ω0tc) (1.94)hvorω0 = 2πf0 =
2π
T0(1.95)Shannon's sætning angiver at fs skal vælges således at fs ≥ 2f0. I dette tilfælde er stigetiden (risetime) tr = ω−1
0 og antallet af samples pr stigetid er:Nr ≡ tr
Ts
=1
2πfo
fs ≥ 1
π≃ 0.32 (1.96)
2Nu er det imidlertid sjældent at udgangssignalet for et dynamisk system har en fouriertrans-formeret der er identisk nul udenfor et givet interval. På grund af den endelige ordlængde i omputere vil valget af Ts være et kompromis mellem rekonstruktion af det underliggendetidskontinuerte signal (høj samplingsfrekvens) og ikke at introdu ere for megen numerisk støj(lav samplingsfrekvens). Valget vil naturligvis være afhængig af den aktuelle sammenhæng,og senere følger nogle håndregler for valg af samplingsfrekvens i forbindelse med digitalereguleringssystemer.Bemærk, at Shannons sætning resulterer i at for en valgt samplingsfrekvens (vinkelfrekvens),fs(ωs) kan kun signalindhold indenfor intervallet [− 1
2fs,
12fs] rekonstrueres. Denne frekvens( 1
2fs) betegnes som Nyquistfrekvensen, fn, hvor
fn =1
2fs ωn =
1
2ωs (1.97)

1.2.2 Digitalt styresignal 39Sætning: 1.2 Samples udgangen af et (autonomt) system:x(tc) = Ax(tc) x(t0) = x0 (1.98)y(tc) = C
⊤x(tc) (1.99)kan systemet i diskret tid beskrives af:
x((k + 1)Ts) = Φx(kTs) x(t0) = x0 (1.100)y(kTs) = ϕ
⊤x(kTs) (1.101)hvor:
Φ = eATs ϕ = C (1.102)under forudsætning af at systemet er tidsinvariant. 2Bevis: Sætningen følger direkte af (1.60). 2Bemærk, at systembeskrivelsen i de to domæner har samme orden.1.2.2 Digitalt styresignalBeslutningerne om hvordan systemet skal påvirkes eller styres udmøntes i en sekvens afstyreindgreb, dvs. et tidsdiskret signal, ut. Dette tidsdiskrete signal omsættes via en D/A-omsætter (Digital til Analog) til det egentlige tidskontinuerte styresignal, u(tc), der (igen) erindgangen til aktuatoren, som fysisk realiserer påvirkningen af reguleringsobjektet. Bemærk,aktuatoren dynamik normalt (regneteknisk) henregnes til systemets samlede dynamik. An-vendes et nulteordens holdenetværk, holdes det analoge styresignal u(tc) konstant mellemsamplingstidspunkterne, dvs.:
u(tc) = uk for kTs ≤ tc < (k + 1)Ts (1.103)SystemD A Aktuator
Figur 1.12. Ved digital regulering holde styresignalet normalt konstant gennem sam-plingsperioden
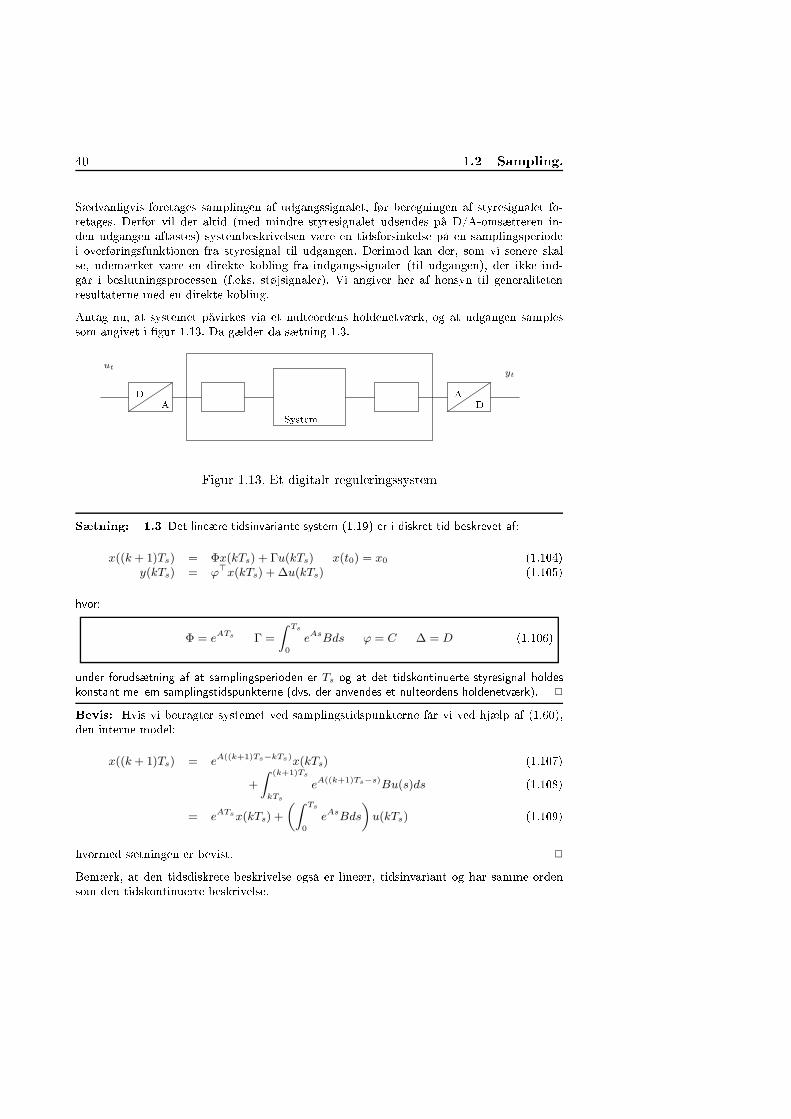
40 1.2 Sampling.Sædvanligvis foretages samplingen af udgangssignalet, før beregningen af styresignalet fo-retages. Derfor vil der altid (med mindre styresignalet udsendes på D/A-omsætteren in-den udgangen aftastes) systembeskrivelsen være en tidsforsinkelse på en samplingsperiodei overføringsfunktionen fra styresignal til udgangen. Derimod kan der, som vi senere skalse, udemærket være en direkte kobling fra indgangssignaler (til udgangen), der ikke ind-går i beslutningspro essen (f.eks. støjsignaler). Vi angiver her af hensyn til generalitetenresultaterne med en direkte kobling.Antag nu, at systemet påvirkes via et nulteordens holdenetværk, og at udgangen samplessom angivet i gur 1.13. Da gælder da sætning 1.3.ytD A A DSystemut
Figur 1.13. Et digitalt reguleringssystemSætning: 1.3 Det lineære tidsinvariante system (1.19) er i diskret tid beskrevet af:x((k + 1)Ts) = Φx(kTs) + Γu(kTs) x(t0) = x0 (1.104)
y(kTs) = ϕ⊤x(kTs) + ∆u(kTs) (1.105)hvor:
Φ = eATs Γ =
Z Ts
0
eAsBds ϕ = C ∆ = D (1.106)under forudsætning af at samplingsperioden er Ts og at det tidskontinuerte styresignal holdeskonstant mellem samplingstidspunkterne (dvs. der anvendes et nulteordens holdenetværk). 2Bevis: Hvis vi betragter systemet ved samplingstidspunkterne får vi ved hjælp af (1.60),den interne model:
x((k + 1)Ts) = eA((k+1)Ts−kTs)
x(kTs) (1.107)+
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
Bu(s)ds (1.108)= e
ATsx(kTs) +
„Z Ts
0
eAsBds
«
u(kTs) (1.109)hvormed sætningen er bevist. 2Bemærk, at den tidsdiskrete beskrivelse også er lineær, tidsinvariant og har samme ordensom den tidskontinuerte beskrivelse.

1.2.3 Sampling af målbar påvirkning 41Eksempel: 1.19 Betragt den interne beskrivelse (1.32) og (1.33) af tanksystemet fra eksempel1.4. Antag, at forstyrrelsen v2 = 0 og at styresignalet er konstant i samplingsperioden. Vælgesen samplingsperiode på Ts = τ/3 = 33.3sek (dette valg kommenteres senere) fås en tidsdiskretbeskrivelse med:Φ =
„
0.847 00 0.717
«
Γ =
„
30.722.7
« (1.110)ϕ⊤ =
`
0 1´
∆ = 0 (1.111)Den tidsdiskret beskrivelse ndes let med Matlab routinen 2d, men kan i dette simple tilfælde (let)beregnes analytisk (fordi A-matri en er på diagonalform). 2Eksempel: 1.20 Hvis støddæmpersystemet fra eksempel 1.2 samples med en periode på Ts =0.0738sek (dette valg kommenteres senere) vil systemet være beskrevet af:
»
Φ Γϕ⊤ ∆
–
=
2
4
0.9098 0.0655 | 0.092−2.365 0.7533 | 2.382
1 0 | 0
3
5 (1.112)2Hvis udgangspunktet er en ekstern beskrivelse, som f.eks. (1.45) eller en overføringsfunktioni Lapla edomænet (1.82) da er det naturligvis muligt at vælge en intern beskrivelse, derhar samme overføringsfunktion. Denne interne beskrivelse kan så anvendes til bestemmelseaf en intern beskrivelse i det tidsdiskrete domæne. Endelig er det muligt at eliminere til-standene med en ekstern beskrivelse som resultat. Det er dog muligt at anvende en meredirekte metode. Lad Hc(s) betegne det tidskontinuerte systemets overføringsfunktion i La-pla edomænet og lad H(z) være det tidsdiskrete systems overføringsfunktion i Z-domænet.Det kan vises (se f.eks. (Andersen 1978) eller (Åström & Wittenmark 1984)) at hvis Hc(s)har et poloverskud og ikke har multiple poler gælder der at (når der anvendes et nulteordensholdenetværk):
H(z) = (1 − z−1)Z
„
Hc(s)
s
«
= (1 − z−1)
X
pi
Res
G(s)
s
1
1 − z−1esTs
ff (1.113)hvor i ∈ [1;n]. Her symboliserer Z(f(s)) den Z−transformerede af f(s), hvor f(s) tilhørerLapla edomænet. Størrelsen, pi, er pol i G(s)s
. I Appendix B er der angivet sammenhængendeoverføringsfunktioner i Lapla e- og Z-domænet, når der anvendes et nulteordens holdenet-værk.1.2.3 Sampling af målbar påvirkningHvis påvirkningen af systemet ikke er et styresignal, men er det, der betegnes som en målbarforstyrrelse, kan vi ikke generelt anvende resultatet fra det forrige afsnit (med mindre dennepåvirkning af en eller anden grund holdes konstant mellem samplingstidspunkterne). I detteafsnit skal vi se, hvorledes vi i diskret tid kan beskrive et dynamisk system, der har enpåvirkning, der udvikles lineært mellem samplingstidspunkterne. (Denne situation betegnes

42 1.2 Sampling.ofte i litteraturen som en anvendelse af et første ordens holdenetværk). Dette er i realtid naturligvis et ret akademisk tilfælde, men det kan i o line tilfældet anvendes som enapproximation for det generelle tilfælde, hvor påvirkningen har en af os ukendt udvikling.Det antages at det tidskontinuerte påvirkningssignal u(tc) har en lineær udvikling mellemu(tc)A D
uk
Systemy(tc)
yk
DAFigur 1.14. Sampling af målbar forstyrrelsesamplingstidspunkterne, dvs.:
u(tc) = uk +uk+1 − uk
Ts
(tc − kTs) (1.114)= uk[1 − tc − kTs
Ts
] + uk+1tc − kTs
Ts
(1.115)hvor uk og uk+1 er samplingen af u(tc) dvs. uk = u(kTs) og uk+1 = u((k + 1)Ts).Sætning: 1.4 Antag, at systemet beskrevet af (1.19) er påvirket af et signal, der udvikles li-neært mellem samplingstidspunkterne og at systemudgangen samples til samplingstidspunkterne.Da kan systemet i diskret tid beskrives af:zk+1 = Φzt + Γut (1.116)yk = ϕ
⊤zt + ∆uk (1.117)hvor:»
Φ Γ
ϕ⊤ ∆
–
=
»
eATs Φ(Γ0 − Γ1) + Γ1
C⊤ D +C⊤(Γ0 − Γ1)
– (1.118)og:Γ0 =
Z Ts
0
eAxBdx Γ1 =
1
Ts
Z Ts
0
eAxBxdx (1.119)Systemtilstandene er givet ved:
xk = zk + (Γ0 − Γ1)uk (1.120)2

1.2.3 Sampling af målbar påvirkning 43Bevis: Anvender vi igen (1.60) til bestemmelse af systemtilstandene til samplingstidspunk-terne har vi at:x((k + 1)Ts) = e
A((k+1)Ts−kTs)x(kTs) (1.121)
+
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
Bu(s)ds (1.122)= e
ATsx(kTs) (1.123)+
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
Buk[1 − s− kTs
Ts
]ds (1.124)+
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
Buk+1s− kTs
Ts
ds (1.125)= Φx(kTs) + Γ1u(kTs) + Γ2u((k + 1)Ts) (1.126)Indføres matri en:
Γ0 =
Z Ts
0
eAxBdx (1.127)(kendt fra (1.106)) resulterer en mindre variabelsubstitution (s = (k + 1)Ts − x) i at:
Γ1 =
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
B[1 − s− kTs
Ts
]ds (1.128)=
1
Ts
Z Ts
0
eAxBxdx (1.129)
Γ2 =
Z (k+1)Ts
kTs
eA((k+1)Ts−s)
Buk+1s− kTs
Ts
ds (1.130)=
Z Ts
0
eAxB
„
1 − x
Ts
«
dx (1.131)= Γ0 − Γ1 (1.132)kan systemet beskrives ved:
xk+1 = Φxt + Γ1uk + Γ2uk+1 (1.133)yk = C
⊤xk +Dut (1.134)Indføres nu vektoren zt ved:xk = zk + Γ2uk ( dvs. at xk+1 = zk+1 + Γ2uk+1) (1.135)gælder der at:
zk+1 = Φxk + Γ1uk = Φ(zk + Γ2uk) + Γ1uk (1.136)= Φzk + (ΦΓ2 + Γ1)uk (1.137)
yk = ϕ⊤xk + ∆0uk (1.138)
= ϕ⊤zt + (D +C
⊤Γ2)uk (1.139)2

44 1.2 Sampling.Bemærk, at en tidsdiskret beskrivelse af (1.19) er en lineær tidsinvariant beskrivelse medsamme orden som (1.19). Det skal bemærkes at Γ0 og Γ1 (samt Φ og Γ) let kan bestemmesf.eks. ved hjælp af Matlab pro eduren 2dm.Eksempel: 1.21 Betragt nu fortsættelse af eksempel 1.19 den interne beskrivelse (1.32) og(1.33) af tanksystemet fra eksempel 1.4. Antag i dette eksempel at v2 (owvariationer i sekundæreindløb) er en målbar forstyrrelse og at denne er lineært varierende mellem samplingtidspunkterne(hvilket selvfølgelig er en approximation). Vælges en samplingperiode på Ts = τ/3 = 33.3sek ndesmed hjælp af Matlab`s 2dm at:»
Φv Γv
ϕ⊤v ∆v
–
=
2
4
0.847 0 | 28.30 0.717 | −4.820 1 | −2.99
3
5 (1.140)Dermed kan tanksystemet (under de nævnte antagelser) beskrives ved:zt+1 =
»
0.847 00 0.717
–
zt +
»
30.722.7
–
ut (1.141)+
»
28.3−4.82
–
v2(t) (1.142)yt =
ˆ
0 1˜
zt − 2.99v2(t) (1.143)21.2.4 Valg af samplingsfrekvensValget af samplingsfrekvens er naturligvis relateret til den aktuelle aktivitet. I forbindelsemed systemidentikation vil valget være relateret til systemets dynamik, mens det i forbin-delse med regulering vil være relateret til dynamikken af den (ønskede) lukkede sløjfe.Som tidligere nævnt er valget resultatet af et kompromis. En lav samplingsfrekvens vilbevirke et lavt informationsindhold i det samplede signal. En høj samplingsfrekvens vil kræveøgede omputer ressour er. Desuden kan en høj samplingsfrekvens introdu ere numerisk støjsamt udslette informationen om systemets dynamik. Dette kan spe ielt være et problem iforbindelse med systemidentikation.Håndregler til bestemmelse af Ts kan have forskellige iklædninger. Den her valgte tagerudgangspunkt i (Åström & Wittenmark 1984) og er baseret på en angivelse af Nr, antalletaf samples pr. stigetid (tr, rise time, deneret som den re iprokke af maksimum til denaedet af trinresponsen normeret til 1) hvor:
Nr =tr
Ts
(1.144)Fra eksempel 1.18 ved vi at den nedre grænse Nr = 1π
≃ 0.32 optræder for en ren sinus-svingning (der opfylder kravet i Shannons sætning). I praktiske sammenhæng vælges ofteNr ∈ [2; 4] (1.145)

1.2.4 Valg af samplingsfrekvens 45Eksempel: 1.22 Betragt første ordens systemet fra eksempel 1.11. Her er:Tr = τ (1.146)Dvs. valget af samplingperiode efter håndreglen (1.145) opfylder:
fs = Nr1
τ(1.147)Dette er baggrunden for at Ts er valgt som τ/3 i eksempel 1.19. 2Eksempel: 1.23 Betragt andenordens systemet fra eksempel 1.12. Her gælder at stigtiden, tr(jvf. appendix H) er givet ved:
tr =1
ω0exp
„
φ
tan(φ)
« (1.148)Dvs. at:Ts =
1
ω0exp
„
φ
tan(φ)
«
1
Nr(1.149)Det bemærkes at for 0 ≤ ζ < 1 er faktoren, exp
“
φtan(φ)
”, bundet til intervallet [1; e[. Spe ielt gælderat for φ = π/4 (ζ =√
22) giver håndreglen at:
ω0Ts ∈ [0.5; 1] (1.150)Valget af samplingperiode i eksempel 1.20 fremkommer med Nr = 3 og med φ og ω0 fra tabel 1.5.2Eksempel: 1.24 Betragt to systemer der i kontinuert tid er beskrevet ved deres overføringsfunk-tioner:
G1(s) =1
s + 1G2(s) =
1
s(1.151)Disse har i diskret tid en beskrivelse:
H1(z) =b
z − aH2(z) =
z
z − 1(1.152)Det bemærkes fra tabel 1.8 af for Ts < 0.01 skal a-parameteren være bestemt ret præ ist for atkunne adskille de to systemers poler. 2
Ts a b0.25 0.779 0.22120.1 0.905 0.095220.05 0.951 0.04880.01 0.990 0.01000.005 0.995 0.0050Tabel 1.8. Parameter i tidsdiskret beskrivelse (1.152) i eksempel 1.24

46 1.3 Tidsdiskrete Systemer1.3 Tidsdiskrete SystemerI det følgende vil vi betragte systemer, der er beskrevet i diskret tid. Vi vil af bekvemmelig-heds hensyn arbejde i normeret tid, dvs. at den uafhængige variable tc eller tiden er normeretmed samplingperioden, således at t ∈ [... − 1, 0, 1, ...]. Lad os starte med to eksempler.Eksempel: 1.25 Betragt tanksystemet beskrevet i diskret tid, dvs. eksempel 1.19. Dette systemkan jvf. eksempel 1.19 beskrives af:xt+1 =
»
0.847 00 0.717
–
xt +
»
30.722.7
–
ut (1.153)yt =
ˆ
0 1˜
xt (1.154)2Eksempel: 1.26 Lad os betragte støddæmpersystemet fra eksempel 1.20 beskrevet i diskret tid.Dette kan jvf. eksempel 1.20 beskrives ved:
xt+1 =
»
0.9098 0.0655−2.365 0.7533
–
xt +
»
0.0922.382
–
ut (1.155)yt =
ˆ
1 0˜
xt (1.156)2Af hensyn til generaliteten vil vi i det følgende betragte systemer der også indeholder endirekte overføring, dvs. intern system beskrivelser:
xt+1 = Φxt + Γut xt0 = x0 (1.157)yt = ϕ
⊤xt + ∆ut (1.158)For at opnå den eksterne beskrivelser af systemet kan vi anvende præ is samme fremgangs-måde som i forbindelse med tidskontinuerte systemer, nemlig ved at eliminere systemtilstan-dene. Vi får følgende systembeskrivelse:
yt+n + a1yt+n−1 + ...+ anyt = b0ut+n + b1ut+n−1 + ...+ bnut (1.159)eller:yt + a1yt−1 + ...+ anyt−n = b0ut + b1ut−1 + ...+ bnut−n (1.160)der kun knytter de dynamiske sammenhænge mellem styresignalet, ut, og udgangssignalet
yt.Eksempel: 1.27 Lad os fortsætte eksempel 1.25. Direkte regninger giver os at den dynamiskesammenhæng mellem kon entration i udløbet og styresignalet (in ow F1) er givet ved:yt+1 − 0.717yt = 22.7ut (1.161)

47eller ved:yt − 0.717yt−1 = 22.7ut−1 (1.162)Bemærk, at dette er en første ordens beskrivelse, hvilket skyldes at den interne beskrivelse i eksempel1.25 ud over den dynamiske sammenhæng mellem yt og ut også indeholder information om andredynamiske sammenhænge (om volumenets størrelse). Omvendt er den interne beskrivelse i eksempel1.25 ikke en minimal realisering af den eksterne beskrivelse (1.162). 2Eksempel: 1.28 Lad os betragte støddæmpersystemet fra eksempel 1.26. Dette system kan ek-sternt beskrives af:
yt+2 − 1.66yt+1 + 0.83yt = 0.90ut+1 + 0.085ut
yt − 1.66yt−1 + 0.83yt−2 = 0.90ut−1 + 0.085ut−2
(1 − 1.66q−1 + 0.83q−2)yt = q−1(0.90 + 0.085q−1)ut
2Lad x0 være systemets tilstande til initialtidspunktet t0. Det kan let vises (f.eks. ved simpeliteration), at for t ≥ t0 gælder der at:xt = Φt−t0x0 +
t−1X
s=t0
Φt−s−1Γus (1.163)eller at:xt = Φt−t0x0 + Wc(t− t0)U t−1 (1.164)hvor den udvidede styrbarheds matrix:
Wc(τ ) =`
Γ,ΦΓ, ...,Φτ−2Γ,Φτ−1Γ,´
=
» ... ... ... – (1.165)og:U t−1 = (ut−1, ut−2, ..., ut0+1, ut0 , )
⊤ (1.166)Udgangen kan for t > t0 skrives som:yt = ϕ
⊤Φt−t0x0 +t−1X
s=t0
ϕ⊤Φt−s−1Γus + ∆ut (1.167)Det ses heraf at systemets impulsrespons (impulssvar) er givet ved:
ht =
8
<
:
ϕ⊤Φt−1Γ for t > 0∆ for t = 00 for t < 0
(1.168)Generelt (dvs. også for tidskontinuerte systemer) betegnes ϕ⊤ΦiΓ som systemets Markovparametre. I det multivariate tilfælde er disse ikke skalare men matri er.

48 1.3 Tidsdiskrete SystemerVi kan ligeledes skrive udgangen som:yt = ϕ
⊤Φt−t0x0 + ϕ⊤Wc(t− t0)U t−1 + ∆ut (1.169)Lad
Ut−1 = (ut0 , ut0+1, ..., ut−2, ut−1)⊤ (1.170)(rækkefølgen i U og U er byttet om). Arrangerer vi fremtidige udgangssignalerne i en vektor,
Yt = (yt0 , ..., yt−1, yt)⊤ (1.171)gælder der at:
Yt = Wo(t− t0)x0 + Πt−t0Ut (1.172)hvor den udvidede observerbarheds matrix:Wo(τ ) =
2
6
6
6
4
ϕ⊤
ϕ⊤Φ...ϕ⊤Φτ−1
3
7
7
7
5
=
2
4
...
...
...
3
5 (1.173)ogΠt =
2
6
6
6
6
6
6
6
4
h0 0 0 0 ... 0h1 h0 0 0 ... 0h2 h1 h0 0 ... 0h3 h2 h1 h0 ... 0... ... ... ... . . . ...ht ht−1 ht−2 ht−3 ... h0
3
7
7
7
7
7
7
7
5
(1.174)For t0 → −∞ kan vi under passende forudsætninger (at systemet er asymptotisk stabilt)skrive:yt =
∞X
s=−∞ht−sus =
∞X
s=−∞hsut−s = ht ∗ ut (1.175)Dette er en præsentation af systemet ved hjælp af vægtfunktionen, ht. Denne er (i dettidsdiskrete tilfælde) identisk med systemets impulsrespons.Også i forbindelse med tidsdiskrete systemer er det interessant at beskrive hvorledes syste-mets forstærkning er fordelt over frekvensområdet. Der gælder ikke overaskende at:
y(ω) = HF (ω)u(ω) (1.176)hvor igen (noget ustringent) y(ω), u(ω) og HF (ω) betegner fouriertransformationen af yt, utog impulsresponsen, ht. F.eks. er:F(ht) = HF (ω) (1.177)Der gælder, at HF kan ndes ud fra både den interne og eksterne systembeskrivelse, idet:
HF (ω) = ϕ⊤(ejωT
I − Φ)−1Γ + ∆ =b0e
jnωT + b1ej(n−1)ωT + ...+ bn
ejnωT + a1ej(n−1)ωT + ...+ an
(1.178)

49Det bemærkes, at DC-forstærkningen (dvs. forstærkningen for ω = 0) gennem et tidsdiskretdynamisk system er (forudsat den eksisterer) givet ved:HF (0) = ϕ
⊤(I − Φ)−1Γ + ∆ =
Pn
i=0 bi
1 +Pn
i=1 ai
(1.179)Eksempel: 1.29 Lad os forsætte eksempel 1.27. Ud fra (1.178) har vi at:HF (ω) =
22.7
ejωT − 0.717(1.180)Bemærk, at HF (ω) er periodisk med perioden 1
T. Derfor angives tidsdiskrete systemers Fourier-transform ofte i intervallet [−ωn, ωn] (svarende til ωT ∈ [−π, π]). Bemærk, at DC-forstærkningengennem dette system er:
HF (0) =22.7
1 − 0.717(1.181)
2Eksempel: 1.30 For støddæmpersystemet fra eksempel 1.28 gælder jvf. (1.163) og (1.178) at:HF (ω) =
0.90ejωTs + 0.085
ej2ωTs − 1.66ejωTs + 0.83(1.182)
2En anden meget vigtig transformation i forbindelse med beskrivelsen af tidsdiskrete systemerer Z-transformationen, der kan opfattes som blot et spe ialtilfælde af Lapla etransforma-tionen. Z-transformationen eksisterer både i bilateral og en unilateral version. Anvender viden unilaterale Z-transformation gælder der:zx(x) − x0 = Φx(z) + Γu(z) (1.183)og dermed at:
y(z) = ϕ⊤(zI − Φ)−1
x0 + ϕ⊤(zI − Φ)−1Γu(z) + ∆u(z) (1.184)hvor y(z) og u(z) betegner den Z-transformerede af yt henholdsvis ut. Hvis x0 = 0 (eller hvisder anvendes den bilaterale Z-transformation) gælder der jvf. foldningen mellem styresignalog impulsrespons at:
H(z) = ϕ⊤(zI − Φ)−1Γ + ∆ =
ϕ⊤adjzI − ΦΓDet(zI − Φ)
+ ∆ (1.185)=
B(z)
A(z)=b0z
n + b1zn−1 + ...+ bn
zn + a1zn−1 + ...+ an
(1.186)hvor H(z) = Z(ht) er den unilaterale Z-transformation af systemets impulsrespons. Be-mærk, at HF (ω) = H(ejωTs).Ovenstående knytter relationen mellem overføringsfunktion, intern og ekstern beskrivelse.Systemets stabilitet er (jvf. afsnit 1.6) bestemt af rødderne til det karakteristiske polynomi-um:C(z) = Det(zI − Φ) = A(z) = z
n + a1zn−1 + ...+ an (1.187)
50 1.3 Tidsdiskrete SystemerEksempel: 1.31 Lad os forsætte eksempel 1.27. Ved indsættelse i (1.161) fås at overføringfunk-tionen fra styresignal (in ow F1) til udgang (kon entration) er givet ved:H(z) =
22.7
z − 0.717(1.188)
2Eksempel: 1.32 Lad os betragte støddæmpersystemet fra eksempel 1.26 og 1.28. Dette systemkan i Z-domainet beskrives af:H(z) = z−1 0.90 + 0.085z−1
1 − 1.66z−1 + 0.83z−2(1.189)
=0.90z + 0.085
z2 − 1.66z + 0.83(1.190)
2I tidsdomænet kan vi endvidere arbejde med operatorer. Hvis ft er et tidsdiskret signal er(fremad) skifteoperatoren deneret ved:qft = ft+1 (1.191)Da har vi direkte fra den interne beskrivelse (1.19) at:
xt = (qI − Φ)−1Γut (1.192)og dermed at:yt = ϕ
⊤ (qI − Φ)−1 Γut + ∆ut = H(q)ut (1.193)hvor H(q) er systemets pulsoverføringsoperator. Bemærk, den store lighed mellem operato-ren q og den komplekse variable z fra Z-transformationen.En anvendelse af fremadskifteoperatoren i den eksterne systembeskrivelse (1.159) resultereri:(qn + a1q
n−1 + ...+ an)yt = (b0qn + b1q
n−1 + ...+ bn)ut (1.194)eller med en mere kompakt betegnelseA(q)yt = B(q)ut (1.195)hvor:
A(q) = qn + a1q
n−1 + ...+ an (1.196)B(q) = b0q
n + b1qn−1 + ...+ bn (1.197)Omvendt kan vi arbejde i dierensligningen med bagud skiftoperatoren, q−1 der for etvilkårligt tidsdiskret signal, ft, er deneret ved:
q−1ft = ft−1 (1.198)

51Mellem de to skifteoperatorer gælder følgende regneregel:q−1q = 1 (1.199)Anvendes denne operator i den eksterne beskrivelse for vi at:
(1 + a1q−1 + ...+ anq
−n)yt = (b0 + b1q−1 + ...+ bnq
−n)ut (1.200)eller:A(q−1)yt = B(q−1)ut (1.201)hvor:
A(q−1) = 1 + a1q−1 + ...+ anq
−n (1.202)B(q−1) = b0 + b1q
−1 + ...+ bnq−n (1.203)Sædvanligvis (når beregningen af styresignalet foretages tidsmæssigt efter samplingen afudgangen af reguleringsobjektet) er der altid en tidsforsinkelse på mindst en samplingperiodei et reguleringsystem. For ekspli it at markere denne tidsforsinkelse (på k samplingperioder)indføres betegnelsen:
B(q−1) = q−kB(q−1) (1.204)og eksterne systembeskrivelser skrives ofte på formen:
A(q−1)yt = q−kB(q−1)ut (1.205)Generelt er k ≥ 0, mens der for reguleringsobjekter normalt gælder at k ≥ 1.Eksempel: 1.33 Lad os fortsat betragte støddæmpersystemet fra eksempel 1.28. Dette systemkan eksternt beskrives med (1.163) eller med notationen fra (1.205):
B(q−1) = 0.90 + 0.085q−1 (1.206)A(q−1) = 1 − 1.66q−1 + 0.83q−2 (1.207)hvor tidsforsinkelsen, k, er 1. 2Mellem polynomierne i fremadskifte- og tilbageskifteoperatoren samt det karakteristiskepolynomium, C, gælder der:
qnA(q−1) = A(q) = C(q) (1.208)Sluttelig har vi at:
yt = H(q)ut (1.209)hvor:H(q) =
B(q)
A(q)(1.210)
=b0q
n + b1qn−1 + ...+ bn
qn + a1qn−1 + ...+ an
(1.211)

52 1.4 Tilstandstransformationeller:H(q) =
B(q−1)
A(q−1)(1.212)
=b0 + b1q
−1 + ...+ bnq−n
1 + a1q−1 + ...+ anq−n(1.213)
= q−k b0 + b1q
−1 + ...+ bn−kqk−n
1 + a1q−1 + ...+ anq−n(1.214)Eksempel: 1.34 Lad os forsætte eksempel 1.31. Ved hjælp af operator beskrivelsen kan tanksy-stemet (eller rettere overføringen fra styresignal til udgang) beskrives med:
(q − 0.717)yt = 22.7ut (1.215)eller med:(1 − 0.717q−1)yt = q−122.7ut (1.216)Pulsoverføringsoperatoren, H(q), er givet ved:
H(q) = q−1 22.7
1 − 0.717q−1=
22.7
q − 0.717(1.217)
21.4 TilstandstransformationFor et dynamisk system gælder det at indgangsignalet, u og udgangsignalet y er entydigefysiske størrelser. Tilstandende, dvs. elementerne i vektoren x er derimod ikke entydige, menafhænger af det koordinatsystem vi har valgt til at repræsentere systemet i. Sagt med andreord kan vi (under visse begrænsninger) selv vælge hvilke størrelser, der skal repræsentere etgivet systems tilstand. Hvis modellen repræsenterer et fysisk system vil sandsynligvis vælgefysiske størrelser som tilstande, men det er dog ikke nødvendigt.Antag, at vi har givet en beskrivelse af systemet:xt+1 = Φxt + Γut (1.218)yt = ϕ
⊤xt + ∆ut (1.219)1.4.1 SimilartransformationerVi vil i dette afsnit beskæftige os med beskrivelser, der er relateret ved en lineær trans-formation mellem beskrivelserne. Vi kan indføre nye tilstande, z, ved hjælp af den lineæretransformationsmatrix, Υ. Antag, at Υ er regulær og lad:
zt = Υxt (1.220)(se iøvrigt appendix C vedrørende basisskifte.) I det ny koordinatsystem kan vi derfor be-skrive systemet ved:zt+1 = ΥΦΥ−1
zt + ΥΓut (1.221)

1.4.2 Diagonalform 53yt = ϕ
⊤Υ−1zt + ∆ut (1.222)Det vil sige at systembeskrivelsen har præ is samme struktur som (1.218) blot er:
»
Φz Γz
ϕ⊤z ∆z
–
=
»
ΥΦΥ−1 ΥΓϕ⊤Υ−1 ∆
– (1.223)Matri erne Φ,Γ og ϕ afhænger altså af det koordinatsystem vi har valgt til at repræsenteresystemets tilstande. Derimod er den dynamiske relation mellem styresignal, ut, og udgangs-signal, yt, uforandret, idet:yt = ϕ
⊤Υ−1(qI − ΥΦΥ−1)−1ΥΓut + ∆ut = ϕ⊤(qI − Φ)−1Γut + ∆ut (1.224)For et lineært, tidsinvariant system er den karakteristiske ligning og dermed egenværdierneinvariant overfor tilstandstransformationer. Der gælder
Det(λI − ΥΦΥ−1) = Det[Υ(λΥ−1Υ − Φ)Υ−1] (1.225)= Det(Υ)Det(λI − Φ)Det(Υ−1) (1.226)= Det(λI − Φ) (1.227)Yderligere er koe ienterne (og funktioner heraf) i den karakteristiske ligning for Φ ogsåinvariant overfor transformationen:
Φ → ΥΦΥ−1 (1.228)Bemærk, at præ ist de samme overvejelser er gældende for tidskontinuerte systemer.Antag, i det følgende at den dynamiske relation mellem styre- og udgangssignal er givet vedden eksterne beskrivelse:yt + a1yt−1 + ...+ anyt−n = b0ut + b1ut−1 + ...+ bnut−n (1.229)eller at pulsoverføringsoperatoren er givet ved:
H(q) =b0 + b1q
−1 + ...+ bnq−n
1 + a1q−1 + ...+ anq−n=
∞X
i=0
hiq−i (1.230)Vi har i det ovenstående set, at der eksisterer en lang række interne system beskrivelser, hviseksterne beskrivelse er identiske. Med andre ord, hvis vi kun interesserer os for de eksterneforhold kan vi vælge en intern beskrivelse frit blot dens overføringsfunktion er korrekt. Iresten af dette kapitel skal vi betragte nogle vigtige interne beskrivelser bl. a. de såkaldtekanoniske former.1.4.2 DiagonalformBetragt først et tilfælde hvor Φ har forskellige egenværdier. Der ndes da en transforma-tionsmatrix, Υ , (der er regulær) sådan at
ΥΦΥ−1 =
2
6
6
6
4
λ1 0 ... 00 λ2 ... 0... ... . . . ...0 0 ... λn
3
7
7
7
5
ΥΓ =
2
6
6
6
4
β1
β2...βn
3
7
7
7
5
(1.231)

54 1.4 TilstandstransformationDe transformerede tilstandsvariable zi kaldes for modes (svingningstilstande). Hvis systemeter skalart (dvs. kun har et styresignal og et udgangsignal) kan systemligningerne angives påformen:z1(t+ 1) = λ1z1(t) + β1ut (1.232)z2(t+ 1) = λ2z2(t) + β2ut (1.233)... (1.234)zn(t+ 1) = λnzn(t) + βnut (1.235)
yt = c1z1(t) + c2z2(t) + ...+ cnzn(t) + ∆ut (1.236)Denne form kaldes af åbenlyse grunde for diagonalformen.Bemærk, at denne form ikke er entydig idet vi f.eks. kan dividere βi og multipli ere ci meden fælles størrelse og bibeholde den samme relation mellem styre- og udgangsignal. Vi kanf.eks. (for et styrbart system) ksere koe ienterne således atβ1 = β2 = ... = βn = 1 (1.237)Bemærk, at for et n-te ordens system er det mindste antal parametre der skal til at beskri-ve relationen mellem styre- og udgangsignal givet ved 2n + 1 parametre (hvoraf nogle afstrukturgrunde, f.eks. ∆, er nul).I det følgende angives nogle standard eller kanoniske former.1.4.3 Regulatorkanonisk formSom angivet tidligere eksisterer der for en given overføringsfunktion en klasse af internebeskrivelser, der netop har denne overføringfunktion. Hver klasse kan således præsenteresaf en bestemt beskrivelse eller form. Denne beskrivelse betegnes som en kanonisk form. Derer selvfølgelig ere måder at udvælge en sådan kanonisk form og vi skal her i det følgendeangive de 4 mest kendte.Den regulatorkanoniske form (eller C-formen) er meget behagelig ved konstruktion af regu-latorer baseret på tilstandstilbagekobling (se afsnit 2.2.1). Den regulatorkanoniske form ergivet ved (se også gur 1.15):
Φc =
2
6
6
6
4
−a1 ... −an−1 −an
1 ... 0 0. . . ...0 ... 1 0
3
7
7
7
5
Γc =
2
6
6
6
4
10...0
3
7
7
7
5
(1.238)ϕ
⊤c = (b1 − b0a1, b2 − b0a2, ..., bn − b0an) ∆c = b0 (1.239)Bemærk spe ielt den simple struktur i tilfældet uden direkte overføring (dvs. med b0 = 0).

1.4.4 Observerkanonisk form 55x2(t)
ut
yt
b1 b2 b3
x1(t)
x3(t)
−a1 −a2 −a3
Figur 1.15. Regulatorkanonisk form1.4.4 Observerkanonisk formDen observerkanoniske form (eller O-formen) er givet ved:Φo =
2
6
6
6
4
−a1 1 ... 0... . . .−an−1 0 ... 1−an 0 ... 0
3
7
7
7
5
Γo =
2
6
6
6
4
b1 − b0a1
b2 − b0a2...bn − b0an
3
7
7
7
5
(1.240)ϕ
⊤o = (1, 0, ..., 0) ∆o = b0 (1.241)Som i forbindelse med den regulatorkanoniske form udgør tilfældet uden direkte overføring
b2
ut
x3(t)x2(t) x1(t)
yt
−a2−a3 −a1
b3 b1
Figur 1.16. Observerkanonisk form(b0 = 0) en spe iel simpel form. Denne kanoniske form er særdeles velegnet ved konstruktionaf observere (se f.eks. afsnit 2.4.1).
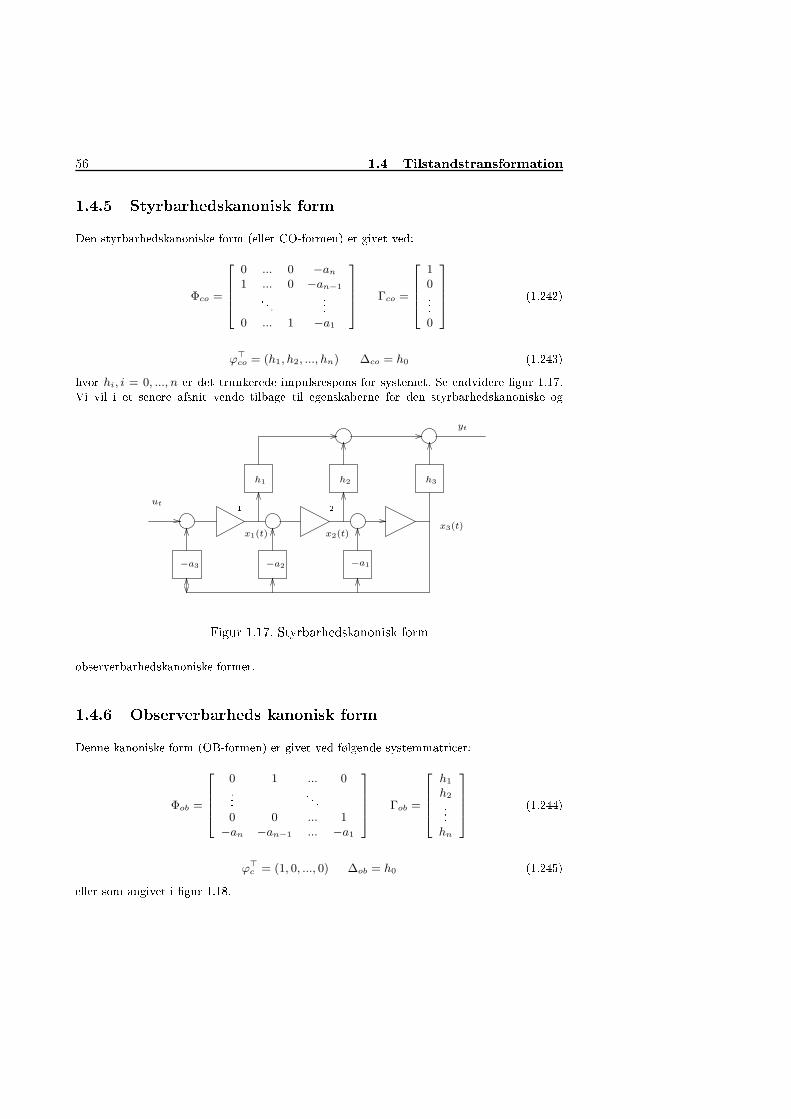
56 1.4 Tilstandstransformation1.4.5 Styrbarhedskanonisk formDen styrbarhedskanoniske form (eller CO-formen) er givet ved:Φco =
2
6
6
6
4
0 ... 0 −an
1 ... 0 −an−1. . . ...0 ... 1 −a1
3
7
7
7
5
Γco =
2
6
6
6
4
10...0
3
7
7
7
5
(1.242)ϕ
⊤co = (h1, h2, ..., hn) ∆co = h0 (1.243)hvor hi, i = 0, ..., n er det trunkerede impulsrespons for systemet. Se endvidere gur 1.17.Vi vil i et senere afsnit vende tilbage til egenskaberne for den styrbarhedskanoniske og
−a1
1 2yt
h1 h2 h3
ut
x1(t) x2(t)x3(t)
−a3 −a2Figur 1.17. Styrbarhedskanonisk formobserverbarhedskanoniske former.1.4.6 Observerbarheds kanonisk formDenne kanoniske form (OB-formen) er givet ved følgende systemmatri er:Φob =
2
6
6
6
4
0 1 ... 0... . . .0 0 ... 1
−an −an−1 ... −a1
3
7
7
7
5
Γob =
2
6
6
6
4
h1
h2...hn
3
7
7
7
5
(1.244)ϕ
⊤c = (1, 0, ..., 0) ∆ob = h0 (1.245)eller som angivet i gur 1.18.

1.4.7 Relation mellem kanoniske former 57−a3
x1(t) = yt
ut
h2 h1
x2(t)x3(t)
h3
−a1 −a2
Figur 1.18. Obserserverbarheds kanonisk form1.4.7 Relation mellem kanoniske formerFra de tidligere re afsnit kan relativt enkelt konstateres at:Φo = Φ⊤
c Γo = ϕc ϕo = Γc (1.246)Φob = Φ⊤
co Γob = ϕco ϕob = Γco (1.247)∆c = ∆o = ∆co = ∆ob = b0 = h0 (1.248)Vi vil i senere afsnit (1.7 og 1.8 om styr- og observerbarhed) angive udtryk for transforma-tionsmatri en Υ.1.4.8 Generelle transformationerVi har nu set forskellige interne beskrivelser, der er indbyrdes forbundet med en lineær (ikkesingulær) transformation (dvs. en similartransformation). Disse former er karakteriseret vedat have samme overføringsfunktion. Det er tilfældet at for enhver overføringsfunktion (ek-stern beskrivelse) eksisterer en underliggende tilstandsbeskrivelse (intern beskrivelse) medden på gældende overføringsfunktion. Man siger at tilstandsbeskrivelsen er en realisering afoverføringsfunktionen. I den forbindelse er det selvfølgelig interessant hvor høj orden derskal til for at repræsentere en given overføringsfunktion.Denition: 1.1 En tilstandsbeskrivelse siges at være en minimal repræsentation foren given overføringsfunktion, hvis den indeholder et minimalt antal tilstande. 2De tidligere nævnte kanoniske former er karakteriseret ved at antallet af tilstande er mini-malt (forudsat at A og B ikke har fælles faktorer). Der eksisterer former med samme over-føringsfunktion, der ikke er minimale. Vi skal i det følgene betragte en, der er meget vigtigi forbindelse med bl.a. systemidentikation.
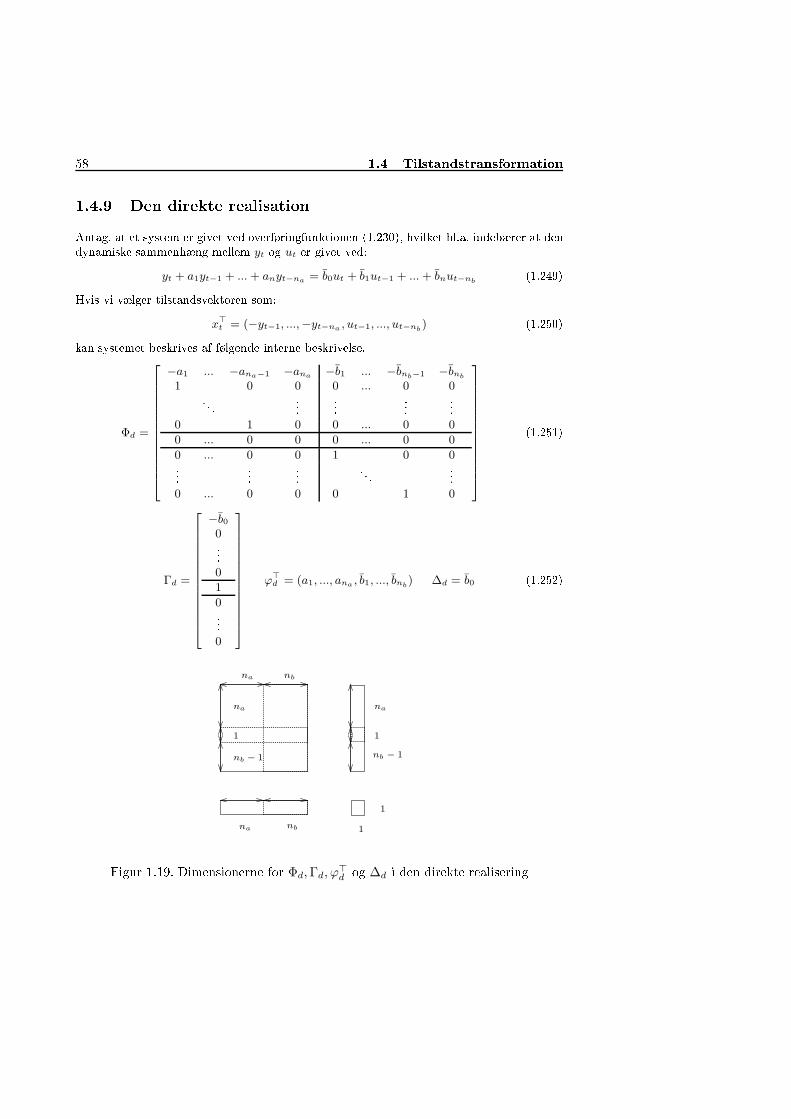
58 1.4 Tilstandstransformation1.4.9 Den direkte realisationAntag, at et system er givet ved overføringfunktionen (1.230), hvilket bl.a. indebærer at dendynamiske sammenhæng mellem yt og ut er givet ved:yt + a1yt−1 + ...+ anyt−na = b0ut + b1ut−1 + ...+ bnut−nb
(1.249)Hvis vi vælger tilstandsvektoren som:x⊤t = (−yt−1, ...,−yt−na , ut−1, ..., ut−nb
) (1.250)kan systemet beskrives af følgende interne beskrivelse.Φd =
2
6
6
6
6
6
6
6
6
6
6
6
6
6
4
−a1 ... −ana−1 −ana −b1 ... −bnb−1 −bnb
1 0 0 0 ... 0 0. . . ... ... ... ...0 1 0 0 ... 0 0
0 ... 0 0 0 ... 0 0
0 ... 0 0 1 0 0... ... ... . . . ...0 ... 0 0 0 1 0
3
7
7
7
7
7
7
7
7
7
7
7
7
7
5
(1.251)Γd =
2
6
6
6
6
6
6
6
6
6
6
6
6
6
4
−b00...0
1
0...0
3
7
7
7
7
7
7
7
7
7
7
7
7
7
5
ϕ⊤d = (a1, ..., ana , b1, ..., bnb
) ∆d = b0 (1.252)
1
na nb
1
na
nb − 1
nbna
na
1
nb − 1
1Figur 1.19. Dimensionerne for Φd, Γd, ϕ⊤d og ∆d i den direkte realisering

59Eksempel: 1.35 Betragt en direkte realisering af overføringsfunktionen:yt =
1
3(1 + q−1 + q−2)ut (1.253)dvs. den interne beskrivelse givet ved:
»
Φd Γd
ϕTd ∆d
–
=
2
4
− 13
− 13
| − 13
1 0 | 013
13
| 13
3
5 (1.254)2Eksempel: 1.36 Betragt overføringen:
H(q) = q−1 b1 + b2q−1
1 + a1q−1(1.255)Den direkte realisering af denne overføring (eksterne beskrivelse) er givet ved:
»
Φd Γd
ϕTd ∆d
–
=
2
6
6
4
−a1 −b1 −b2 | 00 0 0 | 10 1 0 | 0a1 b1 b2 | 0
3
7
7
5
(1.256)21.5 Poler og nulpunkterSystemer med rationelle overføringsfunktioner er ofte karakteriserede ved pla eringen afpoler og nulpunkter. Bl.a. er polernes pla ering bestemmende for et system stabilitetsegen-skaber. I dette afsnit vil vi kort beskrive relationen mellem poler og nulpunkter for et systembeskrevet i kontinuert tid henholdsvis i diskret tid. Vi indleder med denitionen af nulpunk-ter og poler for tidsdiskrete systemer.Denition: 1.2 Ved et nulpunkt for et (skalart) tidsdiskret system forstås zi ∈ C såledesat:
H(zi) = 0 (1.257)hvor:H(z) =
B(z)
A(z)=B(z−1)
A(z−1)H(z) = ϕ
T (zI − Φ)−1Γ + ∆ (1.258)Ved en pol forstås pi ∈ C således at:H
−1(pi) = 0 (1.259)2

60 1.5 Poler og nulpunkterBemærk, at polerne er betstemt af:C(z) = A(z) = Det(zI − Φ) = z
n + a1zn−1 + ...+ an (1.260)og at nulpunkterne er bestemt af:
B(z) = ϕTadjzI − ΦΓ + ∆A(z) = b0z
n + ...+ bn (1.261)Dvs. at overføringsfunktionen for et dynamisk system kan skrives som:H(z) =
B(z)
A(z)= b0
(z − z1)(z − z2) · · · (z − zn)
(z − p1)(z − p2) · · · (z − pn)(1.262)For et sædvanligt reguleringsobjekt (dvs. når der anvendes et nulteordens holdenetværk ognår styreaktionen eektueres efter målingen af udgangssignalet) er der et poloverskud påmindst en. Dvs. at ordenen af B polynomiet er lavere end ordenen af A (bi, i = 0, ...).Dette kan ses direkte af (1.261) idet ∆ = 0 under den beskrevne situation. Det vil igensige at tidsforsinkelsen gennem systemet er mindst en samplingperiode. Idet koe ienternei B og A er reelle er et systems nulpunkter og poler enten komplekse eller reelle. Hvis dereksisterer en kompleks pol (eller nulpunkt) eksisterer den komplex konjugerede også sompol (eller nulpunkt).I kontinuert tid gælder analoge denitioner og en overføringsfunktion for en tidskontinuertbeskrivelse kan bringes på formen:
Hk(s) = K0(s− z1)(s− z2) · · · (s− zmk
)
(s− p1)(s− p2) · · · (s− pnk)
(1.263)hvor zi og pi er nulpunkter og poler for den tidskontinuerte beskrivelse. Sædvanligvis harreguleringsobjekter et poloverskud, dvs. der gælder at mk < nk (hvorved systemet har enforsvindende højfrekvensforstærkning, dvs. reguleringsobjektet har en forstærkning, der gårmod nul for ω → ∞). I visse situationer vil det være tilfældet at mk = nk. I så tilfældesiges systemet at være propert, ellers (for mk < nk) siges systemet at være strengt (ellerægte) propert. Bemærk, at en tidforsinkelse beskrevet i kontinuert tid giver anledning til etikke rationelt element i overføringsfunktionen, hvorimod en tidsforsinkelse i diskret tid påen mere naturlig måde indgår i systembeskrivelsen.Bemærkning: 1.1 De tidligere udtryk knytter sig hovedsageligt til en beskrivelse af etreguleringsobjekt, der har rod i en intern beskrivelse. Hvis udgangspunktet for analysen eren ekstern beskrivelse vil beskrivelsen typisk være af formen:H(q) = q
−k b0 + b1q−1 + ... + bnb
q−nb
1 + a1q−1 + ...+ anaq−na
(1.264)hvor k er tidsforsinkelsen gennem systemet. (Denne modelform er typisk resultatet af ensystemidentikation (se del III)). I dette tilfælde er systemordenen:n = maxk + nb, na (1.265)og der gælder for B og A at:
H(z) =B(z)
A(z)=b0z
n−k + ...+ bnbzn−k−nb
zn + ...+ ana
for n = na > nb + k (1.266)

1.5.1 Poler 61H(z) =
B(z)
A(z)=
b0znb + ...+ bnb
zn + ...+ anazn−na
for n = nb + k > na (1.267)2Eksempel: 1.37 Den tidsdiskrete beskrivelse af systemet:
H(q) = q−3 1 + 0.3q−1
(1 − 0.95q−1)(1 − 0.45q−1)(1.268)har således ordenen 4, en tidsforsinkelse på 3, et nulpunkt i -0.3, poler i 0.95 og i 0.45 samt endobbelt pol i origo. 2Bemærk, at en overføringsfunktion er en ekstern beskrivelse og et givet system kan havesammenfaldende poler og nulpunkter. Det betyder ikke at de pågældende nulpunkter ogpoler ikke har nogen betydning, men blot at de ikke kan ses i den dynamiske sammenhængmellem indgangs - og udgangssignal. En systembeskrivelse givet ved A og B (eller A og
B) kan have sammenfaldende nulpunkter og poler. Hvis zi er en sådan sammenfaldende polog nulpunkt, da vil A(z) og B(z) (eller A(q−1) og B(q−1)) have en fælles faktor af typen(z − zi) (eller af typen (1 − ziq
−1).Denition: 1.3 Hvis en systembeskrivelse givet ved A og B (eller A og B) ikke har fællesfaktorer (dvs. igen sammenfaldene poler og nulpunkter) siges beskrivelsen at være irredu i-bel (eller primisk). 2Hvis en beskrivelse H har sammenfaldende nulpunkter og poler kan beskrivelsen redu erestil H1 og der gælder at H(z) = H1(z) næsten overalt i C (dvs. overalt i C undtagen isystemets poler). Vi vender senere (i forbindelse med observerbarhed og styrbarhed) tilbagetil problemet om fælles faktorer og fortsætte med relationen mellem poler og nulpunkter ide to tidsdomainer, tidskontinuert og tidsdiskret.1.5.1 PolerTidsdiskrete beskrivelser kan som tidligere nævnt være frembragt på forskellig vis. Systemer,der er reguleringsobjekter, er oftest samplet som beskrevet i afsnit 1.2 og relationerne mellemde beskrivelser er som angivet i (1.106) eller i (1.113). Relationen mellem poler i en kontinuertog en tidsdiskret beskrivelse er lettest at etablere. Antag, at det forelagte system er givetved (1.263) hvor mk angiver antallet af nulpunkter (samt ordenen af Bk og hvor nk angiverantallet af poler, dvs. systemordenen eller ordenen af Ak. Systemet kan f.eks. være påintern form, dvs. givet ved (1.19). Overføringsfunktionen er da givet ved (1.82). Bemærk, atmk ≤ nk og at der sædvanligvis er et poloverskud (mk < nk). Vi har følgende sætning.Sætning: 1.5 Relationen mellem en pol, λ, i en tidskontinuert beskrivelse og en pol i endiskrettids beskrivelse, λΦ, (karakteriseret af en samplingperiode på Ts) af et dynamisk systemer givet ved:
λΦ = eλTs (1.269)
2

62 1.5 Poler og nulpunkterBevis: Beviset er lettest at udføre for interne beskrivelser. Det erindres først at overvejel-serne omkring tilstandstransformationer er gyldige for såvel tidskontinuerte som diskrettidsbeskrivelser. Vi tager (for en nemheds skyld) udgangspunkt i en beskrivelse af en tidskon-tinuert system på diagonalform (poler, dvs. egenværdier til systemmatri en er invarianteoverfor en similar transformation). Med:A =
8
>
>
>
<
>
>
>
:
λ1 0 ... 00 λ2 ... 0... ... . . . ...0 0 ... λn
9
>
>
>
=
>
>
>
;
(1.270)har vi at:Φ = e
ATs = I + ATs +1
2A
2T
2s + ... (1.271)
=
8
>
>
>
<
>
>
>
:
eλ1Ts 0 ... 0
0 eλ2Ts ... 0... ... . . . ...0 0 ... eλnTs
9
>
>
>
=
>
>
>
;
(1.272)der har eλTs som egenværdier. Hvis systemet ikke har forskellige egenværdier og dermed ikkekan similartransformeres til en diagonalform, kan man gennemføre ovenstående argumenta-tion via en transformation til en Jordan form. 2Bemærk, at antallet af poler er uforandret ved sampling, hvilket ikke i almindelighed ertilfældet for antallet af nulpunkter.Reel Pol Lad spe ielt:λ = −σ (1.273)hvor σ ∈ R. Det ses heraf at en pol (eller egenværdi) på den reelle akse afbildes på den reelleakse, idet:
λΦ = e−σTs (1.274)Spe ielt gælder, at en stabil reel pol (i en kontinuert tids beskrivelse) afbildes i intervalletmellem origo og 1 på den reelle akse.Kompleks Pol En kompleks pol (i den tidskontinuerte beskrivelse) kan f.eks. beskrives veddæmpningen ζ og pollængden ω0 (se gur 1.21).
λ = −ζω0 + jω0
p
1 − ζ2 (1.275)dvs. er rod i:C(s) = s
2 + 2ζω0s+ ω20 (1.276)I den tidsdiskrete beskrivelse afbildes en kompleks pol i (se gur 1.20):
λΦ = eλT = e
−ζω0T+jω0T√
1−ζ2 (1.277)eller i:λΦ = e
−ζω0T“
cos(ω0Tp
1 − ζ2) + jsin(ω0Tp
1 − ζ2)” (1.278)

1.5.2 Nulpunkter 63Bemærk, at i diskret tid er pollængde, ρ, og vinkel, θ,givet ved:ρ = e
−ζω0Tθ = ω0T
p
1 − ζ2 (1.279)
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Steprespons
y
tFigur 1.20. Trinrespons for system med et sæt komplekse poler ζ varierer over0, 0.1, ...0.9, 1, 2
ζ = sin(ϑ)
ℑ
φ
jω
q
1 − ζ2
ω
ϑ
ℜ−ζωFigur 1.21. Polers pla ering i s-planenSammenhængen mellem poler i kontinuert og diskret tid er overordentlig vigtig, fordi kravenetil digitale regulatorer ofte formuleres som et krav til pla eringen af polerne for den lukkedesløjfe. Traditionelt er polpla eringen beskrevet i kontinuert tid (dvs. i s-planen) fordi derdermed er knyttet en relation til trinrespons (jvf. gur 1.20).1.5.2 NulpunkterI det generelle tilfælde er det ikke enkelt at give et simpelt udtryk for relationen mellem etsystems nulpunkter i de to domainer. Det er dog muligt at give en approximativ relation,der er gyldig i grænsen Ts → 0. Der gælder (jvf. (Åström & Wittenmark 1984)).

64 1.5 Poler og nulpunkter
-1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.10.2 0.3
0.7
0.2
0.4
0.6
0.8
1.0
3.0
2.8
2.6
2.4
2.0
Z-planIm
ag
ReelFigur 1.22. Polers pla ering i z-planen. ζ er angivet fra 0.1 til 0.7, mens ωTs er angivetfra 0.2 til 3.0Sætning: 1.6 Antag, at et system i kontinuert tid er givet ved (1.263) og at der er etpoloverskud (dvs. mk < nk). Antag, at der anvendes et nulteordens holdenetværk og atstyreindgrebene eektueres efter målingen af udgangen. Da gælder, at mk nulpunkter for H gårmod 1 som exp(ziTs) for Ts → 0. De resterende nk − 1−mk nulpunkter går mod nulpunkternefor B⋆nk−mk
, hvor:B
⋆j (z) = b
j1z
j−1 + bj2z
j−2 + · · · + bjj (1.280)
bji =
iX
l=1
(−1)i−llj
„
j + 1i− l
«
, i = 1, ..., j (1.281)2Bevis: Se (Åström & Hägglund 1984) . 2Bemærkning: 1.2 Det kan vises (se (Åström & Wittenmark 1984)) at den tidsdiskreteoverføringsfunktion for
Hk(s) =1
sn(1.282)(eksakt, for Ts > 0) er givet ved:
H(z) =Tn
s
n
B⋆n
(z − 1)n(1.283)når der anvendes et nulteordens holdenetværk. 2Bemærkning: 1.3 I tabel 1.9 er B⋆
n samt de ustabile nulpunkter for B⋆n angivet. Anven-delsen af sætning 1.6 sammenholdt med tabel 1.9 er at et (eventuelt skikkeligt minimumsfase)system beskrevet i kontinuert tid med et poloverskud på mindst 2 vil have ustabile nulpunkteri den tidsdiskrete beskrivelse, hvis samplingsfrekvensen er tilstrækkelig høj. Systembeskrivel-ser med ustabile invers er med andre ord langt hyppigere i diskret tid og er relateret til enhøj sampling frekvens. 2

1.5.2 Nulpunkter 65n B⋆
n(z) ustabile nulpunkter i B⋆n(z)1 12 z + 1 -13 z2 + 4z + 1 -3.7324 z3 + 11z2 + 11z + 1 -1, -9.8995 z4 + 26z3 + 66z2 + 26z + 1 -2.322, -23.26 z5 + 57z4 + 302z3 + 302z2 + 57z + 1 -1, -4.5542,-51.22Tabel 1.9. Tabel over B⋆
n(z) og ustabile nulpunkter i B⋆n(z)Eksempel: 1.38 Betragt systemet, der i Lapla edomainet er givet ved overføringsfunktionen:
G(s) =1
s3(1.284)hvilket er en beskrivelse der har en stabil invers. I diskret tid er beskrivelsen i Z-domainet givet ved:
H(z) =T 3
s
6
z2 + 4z + 1
(z − 1)3(1.285)Denne beskrivelse har et nulpunkt i z1 = −3.732, hvilket klart er udenfor stabilitetsområdet. Be-mærk, at udsagnet her gælder eksakt uafhængigt af samplingfrekvensen jvf. bemærkning 1.2. 2Eksempel: 1.39 Lad os betragte støddæmpersystemet fra eksempel 1.26 og 1.28. Til bestemmelseaf dette systems nulpunkter har vi (jvf. f.eks. (1.189))
B(z) = 0.0902z + 0.0851 (1.286)dvs. et nulpunkt i -0.9426. Bemærk, at nulpunktets pla ering (i beskrivelsen) er meget følsom overforpræ isionen i angivelsen af koe ienterne i B polynomiet. Bemærk ligeledes at nulpunktet (jvf.diskussionen i afsnit 1.4.2) er beliggende i kort afstand til stabilitets grænsen (her -1) p.gr.a. etpoloverskud på 2. Systemets poler kan bestemmes af:A(z) = z2 − 1.66z + 0.83 (1.287)hvormed disse er beliggende i:
pi = 0.8315 ± j0.3833 (1.288)hvilket er klart indenfor stabilitetsgrænsen. 2Ovenstående diskussion omhandler problemer omkring hurtig sampling; nemlig at nulpunk-terne under visse betingelser er beliggende udenfor stabilitetsområdet og at polerne sam-menklumpes omkring 1. Dette kapitel afsnit afsluttes med en diskussion af det modsatte;nemlig forholdene omkring langsom sampling.Sætning: 1.7 Lad Hk(s) være en rationel overføringsfunktion med et poloverskud og medstabile poler (Repi < 0) samt en ikke forsvindende DC-forstærkning (Hk(0) 6= 0). Da vil allenulpunkter i den tidsdiskrete overføringsfunktion gå mod origo med Ts → ∞. 2

66 1.5 Poler og nulpunkterBevis: Se (Åström & Wittenmark 1984)) 2Modsat sætning 1.6 udsiger sætning 1.7 at et system, der i kontinuert tid er et ikke mini-mumfasesystem, i diskret tid kan have en beskrivelse der har en stabil invers (alle nulpunkterligger indenfor enheds irklen) forudsat at samplingfrekvensen er tilstrækkelig lav.Eksempel: 1.40 (Fra (Åström & Wittenmark 1984)) Betragt et system, der i kontinuert tid ergivet ved:Hc(s) = 6
1 − s
(s + 2)(s + 3)(1.289)Bemærk, at dette system har et nulpunkt klart udenfor stabilitetsområdet (dvs. har et nulpunkti højre halvplan). Systemet har således ikke en stabil invers eller er det vi betegner som et ikkeminimumfase system. Systemets trinrespons er skitseret i gur 1.23. Bemærk den for denne klasseaf systemer så karakteristiske respons (svinger ud modsat asymptotiske værdi). Samples dette systemvil beskrivelsen i diskret tid være af formen:
H(z) =b1z + b2
z2 + a1z + a2(1.290)For Ts = 1.2 er det tidsdiskrete nulpunkt beliggende i −1.199 og altså udenfor enheds irklen. Dette erogså tilfældet for hurtigere samplinger. For Ts = 1.3 er det tidsdiskrete nulpunkt beliggende i −0.84,hvilket klart ligger indenfor enheds irklen. Dette er endvidere tilfældet for langsommere samplings-frekvenser. Noter, at for de lave samplingsfrekvenser (svarende til Ts > 0.9) ses det karakteristiskeudsving ikke. Der eksisterer et frekvensområde, hvor nulpunktet ligger udenfor stabilitetsområdet,men hvor trinresponsen ikke har det karakteristisk udseende. 2
0 1 2 3 4 5 6 7 8 9 10−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Figur 1.23. Trinrespons for ikke minimumfasesystem i kontinuert tid (optrukken), forsamplet system når Ts=1.2 (+) og Ts=1.3 (∗), henholdsvisAfsluttende kan det bemærkes at polers pla ering i forhold til stabilitets området (dvs. omde ligger indenfor eller udenfor stabilitetsområdet) er entydigt bestemt af det underliggendetidskontinuerte systems poler. Modsat gælder systemnulpunkternes beliggenhed i forhold tilstabilitets området. Deres beliggenhed afhænger bl.a. af samplingfrekvensen og af polover-skuddet.

1.5.3 Referen emodeller 671.5.3 Referen emodellerEn måde hvorpå kravspe ikationen til et reguleringssystem (lukketsløjfesystem) kan angivespå er ved at angive en model (en såkaldt referen emodel) for hvordan system skal responderepå en given påvirkning i f.eks. referen en.En referen emodel kan f.eks. være af formenHr(q) =
1 − α
1 − αq−1(1.291)dvs. et første ordenssystem med en DC-forstærkning på 1. Her vælges α normalt såledesat dynamikken i referen emodellen er hurtigere end reguleringsobjektets. Dvs. man vælger
α tættere på origo end systems poler. Man skal i denne sammenhæng huske på den tætteknytning der eksisterer mellem Ts og polers pla ering (jvf. tidligere afsnit).Man kan også anvende en referen emodel af anden orden, f.eks. givet på formen:Hr(q) =
b0 + b1q−1
1 + a1q−1 + a2q−2(1.292)Har man et ønske om pollængde ω og dæmpning ζ kan man vælge
a1 = −e−ζωTscos“
ωTs
p
1 − ζ2”
a2 = e−ζωTs (1.293)Et passende valg af tællerpolynmium kan være
b0 = 1 + a1 + a2 b1 = 0 (1.294)der ligeledes sikrer en DC-forstærkning på 1.Imidlertid er referen emodeller ikke begrænset til første og anden orden. Man ser desudenreferen emodeller spe i eret som Butterworthltre.1.6 Stabilitet.Stabilitet er nok et af de mest vigtige begreber indenfor kontrolteori, idet stabilitet er ennødvendig betingelse for at et reguleringsystem er tilfredsstillende. Derudover kan der f.eks.stilles krav til lukketsløjfe systemets hurtighed og evt. til den af styringen krævne eekt.Vi betragter i det følgende et dynamisk system beskrevet på intern form (eller angivet meden tilstandsbeskrivelse), der ikke nødvendigvis er lineær eller tidsinvariant.xt+1 = f(xt, ut, t) x(tc) = f
c(x(tc), u(tc), tc) (1.295)hvor t ∈ Z (og hvor tc ∈ R). Påvirkningen eller styringen, ut, kan både afhænge af systemetstilstande, xt, samt af (deterministiske) eksterne påvirkninger (tidsfunktioner). Dvs. at:
ut = g(xt, t) u(t) = gc(x(t), t) (1.296)For en given ekstern påvirkning kan analysen således redu eres til en analyse af ligningerne:xt+1 = f(xt, t) x(tc) = fc(x(tc), tc) (1.297)

68 1.6 Stabilitet.der beskriver den lukkede sløjfe. Resultatet af en sådan analyse er således en egenskab fordels systemet og dels påvirkningerne. Vi skal senere se at for lineære systemer er stabiliteten systemegenskab, der er uafhængig af påvirkningens egenskaber. Dette er imidlertid ikkerigtigt i al almindelighed.En løsning til dierensligningen (dierentialligningen) er (under passende kontinuitetsanta-gelser for f) entydigt bestemt af initialbetingelsen:xt0 = x0 x(tc0) = x0 (1.298)Vi skal indledningsvis indføre begreber såsom stationære punkter.Denition: 1.4 (Stationær punkt) Et stationært punkt, xs, for (1.297) er deneretved at:
xs = f(xs, t) 0 = fc(xs, t) (1.299)2Hvis systemet er et lineært tidsinvariant system, dvs. f(x, t) = Φx (eller f(x, t) = Acx),eksisterer der kun et stationært punkt såfremt Φ−I (eller Ac) ikke er singulær. Hvis Φ−I ersingulær eksisterer uendeligt mange stationære punkter. Stationære punkter er interessantei den henseende at de er tænkelige konvergenspunkter for løsninger til (1.297). Hvis eninitialtilstand er identisk (i matematisk forstand) med et stationært punkt vil løsningenvære konstant identisk med initialbetingelsen (og det stationære punkt). Det interessanteer nu hvad der sker hvis initialtilstanden ikke er identisk med det stationære punkt, men ermeget tæt på. Inden vi behandler dette problem, vil vi angribe problemet lidt mere generelt.I det følgende skal vi beskæftige os med en løsning, x0
t , til (1.297), der givet ved initialbetin-gelsen x0t0. Denne kan spe ielt være et af de før omtalte stationære punkter. Det interessanteer nu hvorledes en anden løsning, xt, (givet ved en initialbetingelse der ligger i nærheden af
x0t0) er relateret til x0
t . Lad xt være en løsninger til ligningen (1.297) med initial betingel-serne xt0 . Lad yderligere ‖x‖ betegne en norm af x. Vi denerer stabilitet af en løsning x0som følger.Denition: 1.5 (Stabilitet) Løsningen, x0t er stabil, hvis der for givet ǫ eksisterer et δsåledes at der for alle løsninger med ‖xt0 − x0
t0‖ < δ gælder at ‖xt − x0t‖ < ǫ for alle t > t0.
2Bemærk, at denitionen verbalt siger at x0t er stabil såfremt vi ved at vælge en initialtilstandpassende tæt på x0
t0 kan få en løsning vilkårligt tæt på x0t . Bemærk, at stabilitet er enkontinuitets egenskab.Denition: 1.6 (Asymptotisk Stabilitet) Løsningen, x0
t er asymptotisk stabil, hvisden er stabil og der for ethvert t0 eksisterer et δ således at der for alle løsninger med ‖xt0 −x0
t0‖ < δ gælder at ‖xt − x0t‖ → 0 for t → ∞. 2

69Denition: 1.7 (Eksponentiel Stabilitet) Løsningen, x0t er eksponentiel stabil, hvisder for ethvert t0 eksisterer et c > 0 og et λ > 0 således at der for alle løsninger gælder at
‖xt − x0t‖ < c‖xt0 − x
0t0‖e
−λ(t−t0) (1.300)for alle t > t0. 2Som tidligere nævnt knytter stabilitets egenskaben sig dels til systemet og dels til karakterenaf påvirkningen (ut). For en bestemt påvirkning, ut, er det enkelt at transformere problemetomkring en nominel løsning til et studie i stabilitetsforholdene for:xt+1 = f(xt, t) ˙x(tc) = fc(x(tc), tc) (1.301)hvor:xt = xt − x
0t x(tc) = x(tc) − x
0(tc) (1.302)Dette betyder bl.a. at:f(0, t) = 0 fc(0, tc) = 0 (1.303)altså at origo svarer til den nominelle løsning, idet x er afvigelsen mellem nominel og aktuelløsning. Det betyder spe ielt også at origo er et stationært punkt.Lad S(δ) betegne området med en afstand mindre en δ til origo, altså:S(δ) = x| ‖x‖ < δ (1.304)Da er origo et stabilt stationært punkt, såfremt der for hver S(ǫ) eksisterer en S(δ) således atbanekurverne startende i S(δ) ikke forlader S(ǫ) på noget tidspunkt. Bemærk, at ǫ meget velkan være større end δ. Hvis δ ikke afhænger af t0 siges origo at være ligelig stabil (uniformtstabilt). Det stationære punkt (origo) er asymptotisk stabilt såfremt enhver banekurve,startende i S(δ), konvergerer mod det stationære punkt (origo). Hvis et stationært punkter konvergenspunkt for banekurver med en vilkårligt initialbetingelse siges det stationærepunkt at være asymptotisk stabilt overalt. En nødvendig betingelse for at et stationærtpunkt er asymptotisk stabilt overalt er at det stationære er det eneste. Det største områdefor hvilket en banekurve konvergerer asymptotisk til det stationære punkt kaldes for punktetsattraktionsområde.Det kommer langt ud over denne bog's rammer at gøre rede for de mange forskellige metodertil bestemmelse af stabilitet for ulineære systemer. Vi vil dog nævne Lyapunov's anden meto-de, der er et velegnet redskab til bestemmelse af stabilitet for ulineære dynamiske systemer.Lyapunov udviklede oprindeligt teorien for dierentialligninger (tidskontinuert beskrivelse)men en tilsvarende teori er udviklet for dierensligninger (tidsdiskret beskrivelser). Vi de-nerer først en Lyapunov funktion for det tidsinvariante tilfælde i den åbne mængde Ωindeholdende origo.Denition: 1.8 (Lyapunovfunktion I) En skalar funktion,V (x), er en Lyapunov funk-tion i Ω for:
xt+1 = f(xt) f(0) = 0 eller x(tc) = fc(x(tc)) fc(0) = 0 (1.305)hvis:

70 1.6 Stabilitet.• V (x) er C1 i Ω
• V (0) = 0
• V (x) > 0 for alle x ∈ Ω\0og hvis:∆V (xt) = V (xt+1) − V (xt) ≤ 0 eller V (x(tc)) =
∂V
∂x
⊤fc(x(tc)) ≤ 0 (1.306)for alle x ∈ Ω. 2Sætning: 1.8 Hvis der i en omegn, Ω, af det stationære punkt eksisterer en Lyapunovfunk-tion, V (x), da er det stationære punkt stabilt. Hvis der gælder at:
∆V (xt) = V (xt+1) − V (xt) < 0 eller V (x(tc)) =∂V
∂x
⊤fc(x(tc)) < 0 (1.307)da er det stationære punkt asymptotisk stabilt. Hvis Ω = R
n og V (x) → ∞for‖x‖ → ∞ da erdet stationære punkt stabilt overalt. 2Det er muligt at give en simpel geometrisk tolkning af ovenstående denition og sætningsom V (x) værende en potentialfunktion. Lad os nu vende os mod det tidsvariende tilfælde.Denition: 1.9 (Lyapunov funktion II) Lad W (x) være en i Ω positiv denit funk-tion, dvs.W (x) er C1 i Ω
W (0) = 0
W (x) > 0 for alle x ∈ Ω\0En skalar funktion,V (x, t), er en Lyapunov funktion i Ω for:xt+1 = f(xt, t) f(0, t) = 0 eller x(tc) = fc(x(tc), tc) fc(0, tc) = 0 (1.308)hvis:• V (x, t) eksisterer i Ω for alle t ≥ t0
• V (0, t) = 0 for alle t ≥ t0
• Der eksisterer en positiv denit funktion, W (x), således at V (x, t) > W (x) for allex ∈ Ω og alle t ≥ t0og hvis:
∆V (xt, t) = V (xt+1, t+ 1) − V (xt, t) ≤ 0 (1.309)ellerV (x(tc), tc) =
∂V
∂t+∂V
∂x
⊤fc(x(tc)) ≤ 0 (1.310)for alle x ∈ Ω. 2

1.6.1 Stabilitet af lineære, tidsinvariante systemer 71Sætning: 1.9 Hvis der i en omegn, Ω, af det stationære punkt eksisterer en Lyapunovfunk-tion, V (x, t), da er det stationære punkt stabilt. Hvis der gælder at:∆V (xt, t) = V (xt+1, t+ 1) − V (xt, t) < 0 (1.311)ellerV (x(tc), tc) =
∂V
∂t+∂V
∂x
⊤fc(x(tc)) < 0 (1.312)da er det stationære punkt asymptotisk stabilt. Hvis Ω = R
n og V (x, t) → ∞ for ‖x‖ → ∞, daer det stationære punkt stabilt overalt. 2Hovedproblemet i at bruge Lyapunovteorien er at nde en passende Lyapunovfunktion,hvilket i det generelle tilfælde ingen lunde er enkelt.Vi har nu beskæftiget os med det, man ud fra denitionen vil kalde løsningsstabilitet. Mankan imidlertid hurtigt indse at stabilitet overfor forstyrrelser i initialbetingelsen er identiskmed løsningstabilitet. Der eksisterer naturligvis andre interessante stabilitets begreber. En afdem er BIBO-stabilitet (bounded input bounded output). Et signal siges at være begrænset,hvis der eksisterer en konstant C <∞ således at der for alle t gælder at |ut| < C.Denition: 1.10 (BIBO-stabilitet) Et system er BIBO stabilt hvis der for alle be-grænsede indgangssignaler gælder at udgangen er begrænset. 21.6.1 Stabilitet af lineære, tidsinvariante systemerHvis vi begrænser os til lineære tidsinvariante systemer, gælder det imidlertid at stabiliteter en systemegenskab, d.v.s. en egenskab der kendetegner systemet alene og ikke afhængeraf en eventuel påvirknings natur.For et lineært, tidsinvariant system kan analysen, som i det tidligere, begrænses til en analyseaf den autonome ligning, dvs. af:xt+1 = Φxt xt0 = x0 x(t) = Acx(t) x(t0) = x0 (1.313)Sætning: 1.10 Et lineært tidsdiskret [tidskontinuert system er asymptotisk stabilt hvis ogkun hvis alle egenværdier ligger indenfor enhed irklen [i venstre halvplan). Hvis en egenværdiligger udenfor stabilitetsområdet er systemet ustabilt. Hvis en simpel egenværdi (dvs. med mul-tipli iteten en) ligger på stabilitetsgrænsen er systemet stabilt (men ikke asymptotisk stabilt).Hvis der ligger en egenværdi på stabilitetsgrænsen med en algebraisk multipli itet større dengeometriske multipli itet er systemet ustabilt. 2

72 1.6 Stabilitet.Bemærkning: 1.4 Ved en egenværdis algebraiske multipli itet forstå den multipli itet idet karakteristiske polynomium C(z) = Det(zI − Φ). Ved den geometriske multipli itet for-stå antallet af lineært uafhængige egenvektorer hørende til egenværdien. Den geometriskemultipli itet er altid mindre end eller lig den algebraiske multipli itet. 2Bevis: Antag, at t0 = 0. Beviset gennemføres kun for diagonaliserbare tidsdiskrete syste-mer, hvor løsningen til dierensligningen er:xt = Φt
x0 (1.314)Hvis systemet er diagonaliserbart, består løsningen af en linear kombination af λti, hvor
λi, i = 1, ..., n er egenværdierne til Φ. Generalt, er løsningen en linear kombination af pi(t)λti,hvor pi(t) er polynomier i t med en orden en mindre end multipli iteten af den tilsvarendeegenværdi. For asymptotisk stabilitet må alle løsninger gå mod nul for t → ∞, hvilketkræver, at for der alle egenværdier gælder at |λi| < 1. 2Et systems poler eller egenværdier kan ndes som nulpunkter til den karakteristisk ligning:
C(z) = Det(zI − Φ) = A(z) Cc(s) = Det(sI −Ac) = Ac(s) (1.315)hvor A-polynomiet er nævner i den eksterne beskrivelse, dvs. overføringsfunktion:H(q) =
B(q−1)
A(q−1)=B(q)A(q)
Hc(s) =Bc(s)Ac(s)
(1.316)Ekspli it gælder der for tidsdiskrete systemer:A(z) = znA(z−1) B(z) = z
nB(z−1) (1.317)hvor n er systemordenen.Det fremgår af denitionerne, at asymptotisk stabilitet er det strengeste begreb. Følgendesætning angives uden bevis:Sætning: 1.11 For et lineært, tidsinvariant system gælder at asymptotisk stabilitet medførerstabilitet, exponentiel stabilitet og BIBO stabilitet. 21.6.2 Lyapunov stabilitet for Lineære, tidsinvariante SystemerBetragt følgende lineære tidsinvariante system:
xt+1 = Φxt xt0 = x0 eller x = Acx x(tc0) = x0 (1.318)Det antages at Φ − I (og Ac) er regulær, hvilket medfører at origo er det eneste stationærepunkt. Vi vil nu undersøge systemets stabilitet med Lyapunov's anden metode. Der forsøgesmed:V (x) = x
⊤Px (1.319)

73hvor P er positiv denit matrix. Videre har vi for inkrementet at:∆V (x) = V (Φx) − V (x) = x
⊤Φ⊤PΦx− x
⊤Px (1.320)
= x⊤Φ⊤
PΦ − Px = −x⊤Qx (1.321)der er negativ denit hvis og kun hvis Q er positiv denit. Vi har nu følgende sætning.Sætning: 1.12 Det lineære, tidsinvariante system (1.318) er asymptotisk stabilt overalt hvisog kun hvis der eksisterer to positive denitte matri er, P og Q, således at:
Φ⊤PΦ +Q = P A
⊤c P + PAc = −Q (1.322)hvor Q er positiv denit. 2Ovenstående ligning, (1.322), kaldes for Lyaponovligningen. Det kan vises at denne ligningfor givet arbitrært Q har og kun har en positiv denit løsning P , hvis og kun hvis Φ [eller
Ac har alle egenværdier strengt indenfor stabilitetområdet.1.7 StyrbarhedNæst efter stabilitet er styrbarhed nok et af de vigtigste begreber i forbindelse med styring afdynamiske systemer. Vi indleder med en mere præ is denition af styrbarhed. Først fokuserervi på reguleringsproblemet, dvs problemstillingen omkring at fastholde systemets tilstandei origo (dvs. fokuserer på muligheden for at bringe systemet tilbage til origo).Denition: 1.11 ( ontrolabillity) Et system er regulerbart, hvis og kun hvis dereksisterer en endelig sekvens af styresignaler, der bringer systemet fra en vilkårlig tilstandtil origo. 2Den regulerbare del af tilstandsrummet udgør de punkter, hvorfra det over endlig tid ermuligt at styre systemet til origo. Styrbarhed kan også relateres til problemer omkringservoproblemet, hvor hovedmålet er at følge en bestemt referen e. Problemet er i dettetilfælde om hvorvidt man styre systemet over hele tilstandsrummet.Denition: 1.12 (rea hablillity) Et system er styrbart, hvis og kun hvis der eksistereren endelig sekvens af styresignaler, der bringer systemet fra en vilkårlig tilstand til en andenvilkårlig tilstand. 2I lighed med regulerbarhed er den styrbare del af tilstandsrummet den del, hvorfra det overet endeligt tidsrum er muligt at styre systemet til et vilkårligt punkt. Man bør være klar overat ovenstående denition af rea hablillity og ontrolabillity ndes i en del af litteraturen.De omvendte denitioner eksisterer imidlertid også. Der eksisterer ere måder at afgøre omhele tilstandsrummet er styrbart. Den mest almindelige er anført i nedenstående sætning1.13.

74 1.7 StyrbarhedStyrbarhedx2
Regulerbarhed x1
Sætning: 1.13 Lad Wc(Φ,Γ), hvor:Wc(Φ,Γ) = (Γ,ΦΓ, ...,Φn−1Γ) (1.323)betegne systemets styrbarhedsmatrix. Det lineære tidsinvariante system (ϕ,Φ,Γ,∆) er styrbart(rea hable), hvis og kun hvis Wc har fuld rang (dvs. n). Den styrbare (rea hable) del af tilstan-drummet er identisk med billedrummet for Wc. 2Bevis: Lad τ > n. Det følger direkte af (1.164)) at systemet er styrbart hvis (og kunhvis) Wc(τ ) har fuld rang. Yderligere er den styrbare del af tilstandsrummet givet vedbilledrummet af Wc(τ ). Det følger direkte af Cayley-Hamilton`s sætning (se appendix C.10)at rangen og billedrum af Wc(τ ) og Wc(Φ,Γ) er identiske. 2Bemærkning: 1.5 Bemærk, at:
Wc(Φ,Γ) = Wc(n) (1.324)2Bemærkning: 1.6 Det kan vises at den ikke styrbare del af tilstandsrummet er (jvf. ap-pendix C) identisk med nulrummet N (W⊤
c ) for W⊤c . 2Bemærkning: 1.7 Der er andre metoder til at afgøre om hvorvidt et system er styrbart.Nedenstående metoder er beskrevet i (Kailath 1980) og (Middleton & G. Goodwin 1990)og betegnes som PBH (Popov-Belevit h-Hautus) egenvektor - og rangtest (for styrbarhed).PBH-egenvektortest: Det kan vises at et system er fuldt styrbart, hvis (og kun hvis) derikke eksisterer en vektor, v 6= 0 således at:
Φ⊤v = λv v
⊤Γ = 0 (1.325)Systemet er således ikke styrbart, hvis (og kun hvis) en af egenvektorene til Φ⊤ og Γ erortogonale. PBH-rangtest: Det kan ligeledes vises at et system (Φ,Γ) er styrbart hvis (ogkun hvis):ranksI − Φ Γ = n for alle s ∈ C (1.326)Bemærk, at kravet er trivielt opfyldt for værdier af s ∈ C der ikke er egenværdier til Φ,idet detsI − Φ 6= 0. Kravet skal således spe ielt være opfyldt for de værdier af s, der eregenværdier til Φ. 2

75Et dynamisk system indeholdende en model for forstyrrelserne er et typisk eksempel på etsystem der ikke er fuldt styrbart (fra styresignalet).Det er en simpel følge af denitionerne af styrbarhed medfører regulerbarhed. Derimod erdet modsatte ikke tilfældet i al almindelighed. Det følger af (1.164) at hvis Φ er regulær damedfører regulerbarhed styrbarhed. Vi vil senere vende tilbage til problemet om hvornår etsystem er regulerbart.Vi har nu diskuteret kvalitative aspekter omkring styrbarhed. Styrbarhedsmatri en, Wc, ogspe ielt rangen af denne indeholder vigtig information om hvorvidt systemet er styrbartover hele tilstandsområdet. Det er klart at hvis rangen af Wc er mindre end n er der endel af tilstandsrummet der ikke er styrbart. I praksis kan det være problematisk at styre etsystem ud i visse dele af tilstandsrummet selv omWc har fuld rang. I sådanne problematisketilfælde vil determinanten af Wc være numerisk ret forsvindende (eller konditionstallet forWc vil være stort). Vi vil derfor nu fokusere på et andet kvantitativt mål for styrbarhed,nemlig omkostningerne ved at styre systemet.Antag at det aktuelle system er styrbart og lad os betragte problemet bestående i at styresystemet fra x0 til xt i tidsrummet [t0; t]. Lad endvidere τ = t − t0 betegne længden afhorisonten. Vi har fra (1.164) at:
xt = Φτx0 + Wc(τ )Ut−1 (1.327)hvor:
Wc(τ ) =`
Γ,ΦΓ, ...,Φτ−1Γ´ (1.328)
U t−1 = (ut−1, ut−2, ..., ut0)⊤ (1.329)For τ = t− t0 > n− 1 eksisterer der uendeligt mange løsninger til ligningen:xt = xt − Φτ
x0 = Wc(τ )Ut−1 (1.330)Denne frihed kan udnyttes til at vælge en spe iel løsning. Der kan f.eks. vælges den løsningder kræver mindst energi.Sætning: 1.14 Lad den n× n og positive semidenite styrbarhedsgramian være givet ved:Σc
τ = Wc(τ )W⊤c (τ ) (1.331)Det dynamiske system, (1.19), er styrbart, hvis og kun hvis Σc
τ er regulær for τ > n. Denstyresekvens, U t−1, der bringer systemet fra x0 til xt i tidsrummet [t0; t] (τ = t− t0 > n) underanvendelse af mindst energi, dvs. som minimerer:J = U
⊤t−1U t−1 (1.332)er givet ved:
U⋆t−1 = W⊤
c (τ ) (Σcτ )−1
xt (1.333)hvor xt er givet (1.330). Den anvendte minimale energi er givet ved:J
⋆ = x⊤t (Σc
τ )−1xt (1.334)
2

76 1.7 StyrbarhedBevis: Vi skal først vise at gramianen i (1.331) har fuld rang hvis og kun hvisWc(τ ) har fuldrang. Dermed er gramianen regulær, hvis og kun hvis styrbarhedsmatri en har fuld rang.Hvis Wc(τ ) har fuld rang har Wc(τ )x = 0 og dermed Σcτx = 0 kun uegentlige løsninger.Omvendt hvis Σc
τ har fuld rang har x⊤Σcτx = 0 og dermed Wc(τ )x = 0 kun uegentligeløsninger.Det bemærkes (idet vi undlader tidsargumentet i beviset) først at U⋆ opfylder (1.330), fordi:
WU⋆ = WW⊤(WW⊤)−1
x = x (1.335)Det skal nu bevises at den fundne styrestrategi er optimal. Lad U = U⋆ +µ være en løsningtil (1.330), dvs. at:x = WU = WU
⋆ + Wµ (1.336)Følgelig ligger µ i N (W), dvs. at Wµ = 0. Videre er:J = (U⋆ + µ)⊤(U⋆ + µ) = U
⋆⊤U
⋆ + µ⊤U
⋆ + U⋆⊤µ+ µ
⊤µ (1.337)Da nu:
U⋆⊤µ =
“
W⊤(W⊤W)−1”⊤
µ =“
W⊤W”−1
Wµ = ′ (1.338)er:J = J
⋆ + µ⊤µ ≥ J
⋆ (1.339)hvor:J
⋆ = U⋆⊤U
⋆ = x⊤ (Σc
τ )−1x (1.340)Dermed er U⋆ den optimale strategi. Da J⋆ > 0 og er endelig (for ethvert x) er Σc
τ positivdenit for et styrbart system. 2Bemærkning: 1.8 Ud fra tabsfunktionen i (1.340) kan vi se at Σcτ er et mål for omkost-ningerne ved at styre systemet fra x0 til xt over perioden τ = t − t0. En egenværdianalysekan afsløre hvilke retninger i tilstandsrummet, der f.eks. er spe ielt omkostningskrævende.En egenværdi til Σc
τ er et udtryk for systemets styrbarhed i retningen af den tilsvarendeegenvektor. 2Det kan relativt let indses at styrbarhedsgramianen:Σc
τ = Wc(τ )W⊤c (τ ) = Φτ−1ΓΓ⊤(Φτ−1)⊤ + ... + ΦΓΓ⊤Φ⊤ + ΓΓ⊤ (1.341)
=
τ−1X
i=0
Φi−1ΓΓ⊤(Φi−1)⊤ (1.342)opfylder rekursionen:Σc
τ+1 = ΦΣcτ Φ⊤ + ΓΓ⊤ Σc
0 = 0 (1.343)Denne type rekursion vil vi møde i senere sammenhænge, f.eks. i 5. Hvis egenværdierne forΦ ligger strengt indenfor stabilitetsområdet eksisterer Σc
∞ = limτ→∞ Σcτ , der tilfredsstillerLyaponovligningen:
Σc∞ = ΦΣc
∞Φ⊤ + ΓΓ⊤ (1.344)I dette tilfælde bestemmes en styring over en ubegrænset horisont. Matri en, (Σc∞)−1, ersåledes et mål for systemets indbyggede modstand mod at ændre tilstand.

77Udvidelse: 1 I det kontinuerte tilfælde er gramianen givet ved:Σc
τ =
Z τ
0eAτ BB⊤(eAτ )⊤dτ (1.345)og opfylder:
Σcτ = AΣc
τ + ΣcτA⊤ + BB⊤ (1.346)Systemet (1.19) er styrbart hvis og kun hvis Σc
τ er regulær. 2Udvidelse: 2 For et tidsvariende system gælder at det er styrbart overalt hvis der til ethverttidspunkt t0 eksisterer et tidspunkt t1 > t0 således at:Σc(t1; t0) =
t1X
i=t0
Φ(t1; i)ΓiΓ⊤i Φ⊤(t1; i) (1.347)er regulær. 2Det er en vigtig egenskab ved styrbarhed, at den er invariant overfor similartransformationer(hvor Υ er regulær). Der gælder nemlig at:Sætning: 1.15 Lad Υ være en ikke-singulær matrix der similartransformerer beskrivelsen fra
(ϕ,Φ,Γ) til (ϕz,Φz ,Γz). Da gælder at:Wc(Φz,Γz) = ΥWc(Φ,Γ) (1.348)Σc
τ (Φz,Γz) = ΥΣcτ (Φ,Γ)Υ⊤ (1.349)
2Bevis: Vi har ved direkte indsættelse i (1.323) at:Wc(Φz,Γz) = (ΥΓ, (ΥΦΥ−1)ΥΓ, ..., (ΥΦΥ−1)n−1ΥΓ) (1.350)
= (ΥΓ,ΥΦΓ, ...,ΥΦn−1Γ) (1.351)= ΥWc(Φ,Γ) (1.352)På tilsvarende måde følger (1.349) af (1.331) samt af (1.328). 2Da Υ er regulær ændres rangen af Wc ikke. Dermed ændres systemets styrbarhed ikke kva-litativt. Imidlertid kan en similartransformation godt påvirke konditionstal og determinantfor Wc. Dvs. de kvantitative styrbarhedsegenskaber meget vel kan påvirkes ved et basisskiftei tilstandsrummet (dvs. en similartransformation).Bemærkning: 1.9 Bemærk, at hvis Υ⊤ = Υ−1 (dvs. er unitær) da vil egenværdierne afgraminanen ikke ændres ved transformationen. 2Bemærkning: 1.10 Sætning 1.15 kan anvendes omvendt til at nde similartransformatio-nen fra en beskrivelse (med en bestemt styrbarhedsmatix) til en anden beskrivelse, der f.eks.er på en spe ielt behagelig form. Fra (1.348) har vi direkte at for en similartransformationfra en styrbar systemrepræsentation til en anden gælder at:
Υ = Wc(Φz ,Γz)W−1c (Φ,Γ) (1.353)En sådan anden repræsentation kunne være en af de kanoniske former. Vi angiver derfor(se evt. (Kailath 1980)) styrbarhedsmatri erne for de kanoniske former:
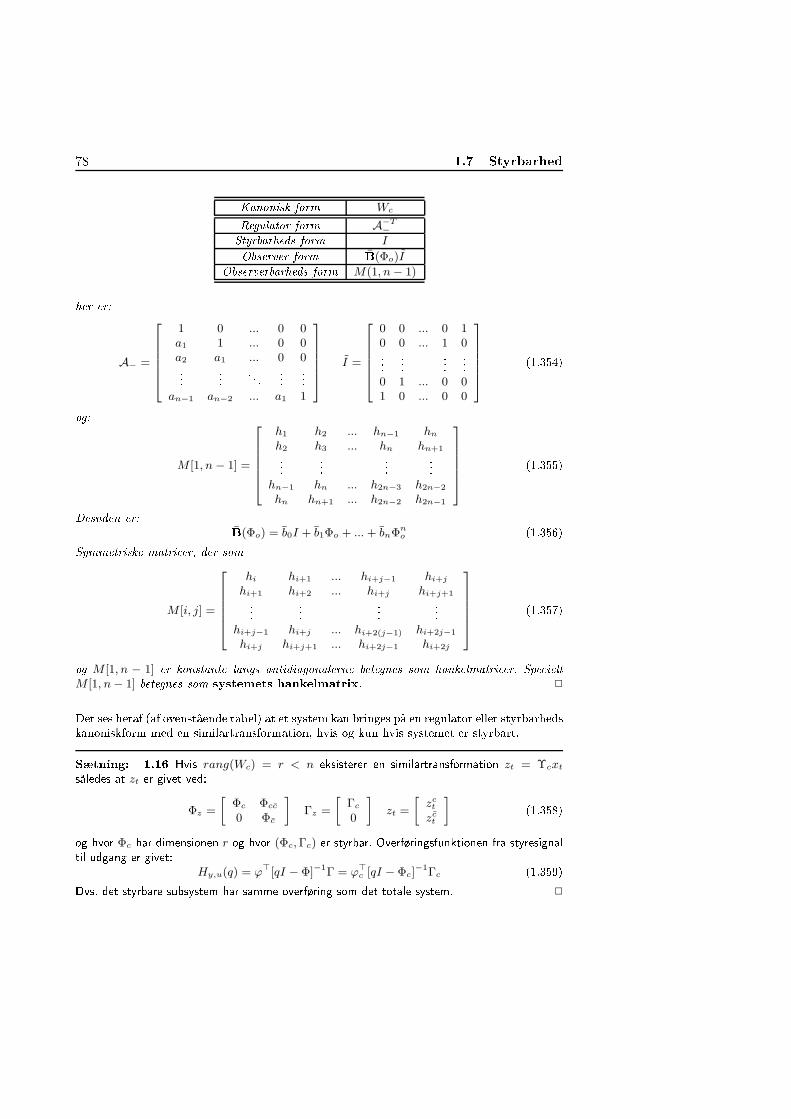
78 1.7 StyrbarhedKanonisk form WcRegulator form A−T−Styrbarheds form IObserver form B(Φo)IObserverbarheds form M(1, n− 1)her er:
A− =
2
6
6
6
6
6
4
1 0 ... 0 0a1 1 ... 0 0a2 a1 ... 0 0... ... . . . ... ...an−1 an−2 ... a1 1
3
7
7
7
7
7
5
I =
2
6
6
6
6
6
4
0 0 ... 0 10 0 ... 1 0... ... ... ...0 1 ... 0 01 0 ... 0 0
3
7
7
7
7
7
5
(1.354)og:M [1, n− 1] =
2
6
6
6
6
6
4
h1 h2 ... hn−1 hn
h2 h3 ... hn hn+1... ... ... ...hn−1 hn ... h2n−3 h2n−2
hn hn+1 ... h2n−2 h2n−1
3
7
7
7
7
7
5
(1.355)Desuden er: B(Φo) = b0I + b1Φo + ...+ bnΦno (1.356)Symmetriske matri er, der som
M [i, j] =
2
6
6
6
6
6
4
hi hi+1 ... hi+j−1 hi+j
hi+1 hi+2 ... hi+j hi+j+1... ... ... ...hi+j−1 hi+j ... hi+2(j−1) hi+2j−1
hi+j hi+j+1 ... hi+2j−1 hi+2j
3
7
7
7
7
7
5
(1.357)og M [1, n − 1] er konstante langs antidiagonalerne betegnes som hankelmatri er. Spe ieltM [1, n− 1] betegnes som systemets hankelmatrix. 2Det ses heraf (af ovenstående tabel) at et system kan bringes på en regulator eller styrbarhedskanoniskform med en similartransformation, hvis og kun hvis systemet er styrbart.Sætning: 1.16 Hvis rang(Wc) = r < n eksisterer en similartransformation zt = Υcxtsåledes at zt er givet ved:
Φz =
»
Φc Φcc
0 Φc
–
Γz =
»
Γc
0
–
zt =
»
zct
zct
– (1.358)og hvor Φc har dimensionen r og hvor (Φc,Γc) er styrbar. Overføringsfunktionen fra styresignaltil udgang er givet:Hy,u(q) = ϕ
⊤[qI − Φ]−1Γ = ϕ⊤c [qI − Φc]
−1Γc (1.359)Dvs. det styrbare subsystem har samme overføring som det totale system. 2

79Styrb.ut yt
Ikke Styrb.Bevis: Se (Middleton & G. Goodwin 1990) side 183 eller (Kailath 1980) side 129. 2Bemærkning: 1.11 De to overføringsfunktioner i (1.359) er identiske næsten overalt.Der vil i overføringsfunktionen i det totale system være mindst n−r fælles faktorer (mellemtæller- og nævnerpolynomium). 2Transformationen kan skrives som:Υ = [S1S2]
−1 (1.360)hvor søjlerne i S1 (n × r) udgør en basis for R(Wc) (range spa e eller billedrummet forWc) og hvor søjlerne i S2 n× (n − r) er lineært uafhængig af søjlerne i S1. Dette valg kanforetages på forskellig vis. S1 kan f.eks. vælges som en ortogonal basis for R(Wc) og S2 kanvælges som en ortogonal basis for N (W⊤
c ) (kernel eller nulrummet for W⊤c ). I Matlab kandisse matri er bestemmes med kommandoerne orth og null. Det er endvidere muligt atvælge transformationen (mere spe ikt S1) således det styrbare subsystem er på en af deto styrbare kanoniske former (eller på en af de to observerbare former, forudsat at dettesubsystem er observerbart). Bemærk, at der eksisterer bedre numeriske funderet metodertil bestemmelse af transformationen.Kravet om regulerbarhed kan virke for restriktivt. I praksis kan kravet relakseret til et kravom stabiliserbarhed.Denition: 1.13 Et system siges at være stabiliserbart, såfremt systemets tilstande kanbringes til origo i et eventuelt uendeligt tidsrum. 2Det følger klart at et styrbart eller et regulerbart system er stabiliserbart. For et ikke fuldtregulerbart system gælder følgende sætning 1.25, der er en direkte følge af sætning 1.16.Sætning: 1.17 Et lineært tidsinvariant system er stabiliserbart, hvis og kun hvis Φc haregenværdier strengt indenfor enheds irklen. 2Diskussionen om hvorvidt det er muligt at styre et givet system afsluttes med at betragteen beskrivelse, der ikke er kanonisk; nemlig den direkte realisering (1.252).Sætning: 1.18 Den direkte form (1.252) er styrbar (rea hable), hvis og kun hvis A(q−1) og
B(q−1) ikke har fælles faktorer. 2Bevis: se (Goodwin & K. S. Sin 1984) 2

80 1.8 Observerbarhed1.8 ObserverbarhedDet er umiddelbart klart, at styrbarhed er et vigtigt begreb i forbindelse med styring afdynamiske systemer. Det samme gælder imidlertid også for det duale begreb, observerbar-hed. Kort sagt består styring i (på baggrund af et systems tilstand) at træe (og eektuere)en sekvens af beslutninger (styreindgreb), der giver systemet den ønskede adfærd. Følgeliger det vigtigt at kende (og i modsat fald at kunne bestemme) et systems tilstand ud framålinger af relevante signaler.Observerbarhed er knyttet til muligheden for at bestemme en initialtilstand ud fra efterføl-gende målinger af udgangssignalet. Vi skal senere stifte bekendskab med relaterede begreberså som konstruerbarhed og detekterbarhed.Denition: 1.14 (Observability) Et system (ϕ,Φ) er observerbart hvis og kun hvis enenhver initialtilstand, x0, kan bestemmes udfra kendskabet til et endeligt antal efterfølgendeobservationer af udgangen og styresignalet. 2Til bestemmelse af om hvorvidt et system er observerbart har vi følgende sætning.Sætning: 1.19 Et system er (ϕ, Φ) er observerbart, hvis og kun hvis observerbarhedsmatri- en:Wo =
2
6
6
6
4
ϕ⊤
ϕ⊤Φ...ϕ⊤Φn−1
3
7
7
7
5
(1.361)har fuld rang, dvs. n. Den eventuelt ikke observerbare del af tilstandsrummet er identisk mednulrummet N (Wo) for Wo. 2Bevis: Sætningen følger direkte af (1.172) og af Cayley-Hamilton's sætning (se appendixC.10). 2Bemærkning: 1.12 Den observerbare del af tilstandsrummet er identisk med billedrum-met R(W⊤o ) for W⊤
o . 2Bemærkning: 1.13 Bemærk, at ifølge (1.173) er:Wo(ϕ,Φ) = Wo(n) (1.362)
2Bemærkning: 1.14 Som i forbindelse med styrbarhed eksisterer der andre metoder til atafgøre om hvorvidt et givet system er observerbart. Heriblandt de såkaldte PBH tests. Sef.eks. (Kailath 1980) eller (Middleton & G. Goodwin 1990). PBH-egenvektor test: Etsystem er ikke fuldt observerbart, hvis (og kun hvis) der eksisterer en vektor, v 6= 0, såledesat:Φv = λv ϕ
⊤v = 0 (1.363)

81Systemet er således ikke observerbart, hvis (og kun hvis) en af egenvektorerne til Φ og ϕ erortogonale. PBH-rangtest: Et system er observerbart, hvis (og kun hvis):rank
»
ϕ⊤
sI − Φ
–
= n for alle s ∈ C (1.364)Det er (jvf. bemærkning 1.7) kun nødvendigt at undersøge rangen for de værdier af s, dersvarer til egenværdier til Φ. 2I forbindelse med regulering er det relevant at kende systemets aktuelle tilstande og ikke såvæsentlig hvad tilstanden var ved et tidligere tidspunkt. Problemet er at kunne bestemme etsystems aktuelle tilstande ud fra tidligere målinger af systemudgangen. Vi denerer derforkonstruerbarhed som angivet i denition 1.15.Konstruerbarhedx0 xt
DataObserverharhedFigur 1.24. Observerbarhed vedrører bestemmelse af x0 ud fra data, mens kontruer-barhed vedrører bestemmelse af xtDenition: 1.15 ( onstru tability) Et system siges at være konstruerbart hvis ogkun hvis det ud fra et endeligt antal tidligere målinger er muligt at bestemme systemetsaktuelle tilstand. 2Ud fra denitionerne ses det direkte at hvis et system er observerbart, da er det konstruer-bart. Hvis Φ er regulær kan vi ud fra et kendskab til xt bestemme x0. Dvs. at konstruer-barhed medfører observerbarhed hvis Φ er regulær. Hvis Φ er singulær kan systemet værekonstruerbar uden at være observerbart.Determinanten og konditionstallet for Wo er kvantitative mål for et systems observerbarhed.Lad os nu fokusere på et andet kvantitativt mål, nemlig hvor meget af den energi, der gennemet interval, [t0, t] afsættes i udgangen stammer fra initialtilstanden, xt0 = x0. Der gælder(jvf. (1.172) simpelt at denne energi er givet ved:J = Y
⊤t Yt = x
⊤0 W⊤
o (τ )Wo(τ )x0 (1.365)Sætning: 1.20 Et dynamisk system er observerbart, hvis og kun hvis:Σo
τ = W⊤o (τ )Wo(τ ) (1.366)

82 1.8 Observerbarhedfor τ ≥ n har fuld rang. Den energi fra x0, der gennem tidsrummet τ = t− t0 transmitteres tiludgangen af systemet er givet ved:J = x
⊤0 Σo
τx0 (1.367)2Bevis: For τ ≥ n har Wo(τ ) og Wo ifølge Cayley-Hamiltons sætning (se appendix C.10)samme rang. Σo
τ har fuld rang, hvis og kun hvis Wo(τ ) har fuld rang. 2Den positive semidenite (n× n) matrix:Σo
τ = W⊤o (τ )Wo(τ ) (1.368)
= ϕϕ⊤ + Φ⊤
ϕϕ⊤Φ + ...+ (Φ⊤)τ−1
ϕϕ⊤Φτ−1 (1.369)
=
τ−1X
i=0
(Φ⊤)iϕϕ
⊤Φi (1.370)betegnes som systemets observerbarhedsgramian. Idet:J = x
⊤0 Σo
τx0 (1.371)er Σoτ et mål for kon entreringen af initalenergien (fra x0) gennem tidsintervallet [t0, t].En egenværdi (for Σo
τ ) er et udtryk for den energimængden i retningen af den tilsvarendeegenvektor, der gennem tidsrummet [t0, t] transmitteres til udgangen.Lad os nu returnere til problemet omkring bestemmelse af initialtilstanden, x0, ud fra enregistrering af ud gangen gennem intervallet, [t0; t]. Ifølge (1.172) har vi sammenhængen:Yt = Wo(τ )x0 + ΠUt (1.372)hvor τ = t− t0. For τ > n udgør (1.372) et overbestemt ligningssystem. Det estimat, x0, derminimerer kvadratafvigelsen mellen Yt og Wo(τ )x0 + ΠUt betegnes som LS-estimatet (LS,eng. Least Squares) af x0. Dette estimat er angivet i følgende sætning.Sætning: 1.21 LS-estimatet af x0 er for τ ≥ n givet ved:
x0 = (Σoτ )−1W⊤
o (τ ) [Yt − ΠUt] (1.373)2Bevis: En simpel følge af (C.50). 2Vi vil senere i kapitel 3.7 vende tilbage til estimatorer og deres egenskaber. Kapitel 7 om-handler spe ielt problemer omkring tilstandsestimation.Ud fra (1.370) kan det indses at observerbarhedsgramianen følger rekursionen:
Σoτ+1 = Φ⊤Σo
τ Φ + ϕϕ⊤ Σo
0 = 0 (1.374)For asymptotiske stabile systemer tilfredstiller (den asymptotiske) observerbarheds-GramianLyapunov-ligningen:Σo
∞ = Φ⊤Σo∞Φ + ϕϕ
⊤ (1.375)

83Denne matrix er som nævnt et mål for systemets naturlige evne til (over en uendelig pe-riode) at transmittere energi til udgangen. En egenværdianalyse afslører hvilke retninger itilstandsrummet der er mere eller mindre observerbare, dvs. transmitterer mere eller mindreenergi til udgangen.Udvidelse: 3 I det tidskontinuerte tilfælde er observerbarhedsgramianen givet ved:Σo
τ =
Z τ
0(eAτ )⊤CC⊤eAτdτ (1.376)og opfylder:
Σoτ = A⊤Σo
τ + Σoτ A + CC⊤ (1.377)Systemet (1.19) er observerbart hvis og kun hvis gramianen er regulær. 2Udvidelse: 4 For et tidsvarierende system gælder at det er observerbart overalt hvis der tilethvert tidspunkt t0 eksisterer et tidspunkt t1 > t0 således at:
Σot1;t0
=
t1X
i=t0
Φ⊤(t1; i)ϕt1ϕ⊤t1
Φ(t1; i) (1.378)er regulær. 2Ligesom styrbarhed er observerbarhed (kvalitativt) invariant overfor similartransformationer.Der gælder at:Sætning: 1.22 Lad Υ være en regulær matrix der similartransformerer beskrivelsen (ϕ,Φ,Γ)til (ϕz,Φz,Γz). Da gælder at:Wo(ϕz,Φz)Υ = Wo(ϕ,Φ) (1.379)
Υ⊤Σoτ (ϕz,Φz)Υ = Σo
τ (ϕ,Φ) (1.380)2Bevis: Som ved styrbarhed får vi ved direkte indsættelse i (1.361) at:
Wo(ϕz,Φz)Υ =
2
6
6
6
4
ϕ⊤Υ−1
ϕ⊤Υ−1(ΥΦΥ−1)...ϕ⊤Υ−1(ΥΦΥ−1)n−1
3
7
7
7
5
Υ = Wo(ϕ,Φ) (1.381)Tilsvarende får vi (1.380) ved indsættelse i (1.370). 2Som i forbindelse med styrbarhed gælder der for observerbarhed at en similartranformationikke ændrer et systems kvalitative observerbarheds egenskaber, men i højeste grad kan på-virke de kvantitative.Bemærkning: 1.15 Bemærk, at hvis Υ⊤ = Υ−1 da vil egenværdierne af graminanen ikkeændres ved transformationen. 2

84 1.8 ObserverbarhedBemærkning: 1.16 Sætning 1.22 kan ligeledes anvendes omvendt, dvs. til bestemmelseaf en similartransformation fra en given (observerbar) systembeskrivelse til en anden. Fra(1.379) har vi direkte at en transformation fra en observerbar beskrivelse til en anden ergivet ved:Υ = W
−1o (ϕz,Φz)Wo(ϕ,Φ) (1.382)En sådan beskrivelse kunne være en af de kanoniske former. Vi angiver derfor (ref. (Kailath1980)) observerbarhedmatri en for de re kanoniske former.Kanonisk form Woregulator form IB(Φc)Styrbar form M(1, n− 1)Observer form A−1
−Observerbarheds form IDet bemærkes, at et system kun kan bringes på en observer- eller observerbarform (med ensimilartransformation), hvis og kun hvis systemet er observerbart. 2Sætning: 1.23 Hvis rang(Wo(ϕ,Φ)) = r < n eksisterer en similar transformation zt = Υxtsåledes at:zt =
»
zot
zot
–
Φz =
»
Φo 0Φoo Φo
–
ϕz =
»
ϕo
0
– (1.383)hvor Φo har rangen r og hvor (ϕo,Φo) er observerbar. Overføringen fra styresignal til udgang ergivet ved:Hy,u(q) = ϕ
⊤[qI − Φ]−1Γ = ϕ⊤o [qI − Φo]
−1Γo (1.384)Dvs. det observerbare subsystem har samme overføring som det totale system. 2Bevis: Se (Middleton & G. Goodwin 1990) side 197 eller (Kailath 1980) side 131 2
Ikke Obs.ut ytObs.
Bemærkning: 1.17 De to overføringsfunktioner i 1.384 er identiske næsten overalt. Dervil i overføringsfunktionen i det totale system være mindst n − r fælles faktorer (mellemtæller- og nævnerpolynomium). 2

85Transformationen kan skrives som:Υ = [S1S2]
−1 (1.385)hvor søjlerne i S1 (n × r) udgør en basis for R(Wo) (range spa e eller billedrummet forWo) og hvor søjlerne i S2 n × (n− r) er lineært uafhængig af søjlerne i S1. Dette valg kanforetages på forskellig vis. S1 kan f.eks. vælges som en ortogonal basis for R(Wo) og S2 kanvælges som en ortogonal basis for N (W⊤
o ) (kernel eller nulrummet for W⊤o ). I Matlab kandisse matri er bestemmes med kommandoerne orth og null. Det er endvidere muligt atvælge transformationen (mere spe ikt S1) således det observerbare subsystem er på en afde to observerbare kanoniske former (eller på de to styrbare former hvis det observerbaresubsystem er styrbart).Tilsyneladende synes kravet om observerbarhed eller konstruerbarhed ret restriktivt. Detviser sig i praksis af der er muligt at relaksere noget på kravene og nøjes med detekterbarhed.Denition: 1.16 Et system siges at være detekterbart hvis og kun hvis modes i denikke observerbare del af tilstandsrummet asymptotisk dør ud. 2Til at afgøre om hvorvidt et givet system er detekterbar har vi følgende sætning.Sætning: 1.24 Et lineært, tidinvariant system er detekterbar hvis og kun hvis Φo har egen-værdier (strengt) indenfor enheds irklen. 2Eksempel: 1.41 Betragt igen den interne beskrivelse fra eksempel 1.36, dvs. en (ikke minimal)direkte realisation af overføringsfunktionen:
H(q) = q−1 1 + 0.5q−1
1 − 0.9q−1(1.386)Den direkte realisation af denne overføring er givet ved:
»
Φd Γd
ϕTd
∆d
–
=
2
6
6
4
0.9 −1 −0.5 | 00 0 0 | 10 1 0 | 0
−0.9 1 0.5 | 0
3
7
7
5
(1.387)Styrbarhedsmatri erne bestemmes (f.eks. vha. Matlab routinen trb) til:Wc =
2
4
0 −1 −1.41 0 00 1 0
3
5 (1.388)der har egenværdierne 0.4147± j1.2312 og −0.8294. Styrbarhedsmatri en har fuld rang og systemeter styrbart. Observerbarhedsmatri en bestemmes (med obsv) til:Wo =
2
4
−0.9 1 0.5−0.81 1.4 0.45−0.729 1.26 0.405
3
5 (1.389)som kun har rangen 2 (og altså ikke fuld rang), hvilket betyder at systemet ikke er observerbart.Egenværdierne bestemmes til: −0.3567, 1.2617 og 0, mens de tilhørenden egenvektorerne kan be-stemmes til (søjlevektorene i matri en V ):V =
2
4
−0.89 0.45 0.49−0.33 0.67 0−0.30 0.60 0.87
3
5 (1.390)

86 1.9 DekompositionDette betyder at retningen bestemt ved egenvektoren, (0.49, 0, 0.87)T ikke er observerbar. Bestemmesoverføringsfunktionen direkte (dvs. uden forkortninger eller andre reduktioner) er:Hs(z) =
z2 + 0.5z
z3 − 0.9z2(1.391)Det ses klart at der eksisterer en fælles faktor (i dette tilfælde z) mellem tæller- og nævnerpo-lynomium. Forkortes denne fælles faktor ud opnå den oprindelige overføring fra eksempel 1.36.
2
1.9 DekompositionI de to tidligere afsnit har vi beskæftiget os med styr- og observerbarhed som isoleredebegreber. Et system med gode styrbarhedsegenskaber, men med ringe observerbarhedsegen-skaber, er ikke særligt fordelagtigt i en reguleringsteknisk sammenhæng. Tilsvarende gælderfor et system med gode observerbarhedsegenskaber og ringe styrbarhedsegenskaber. I detteafsnit vil vi fokusere på de simultane styr- og observerbarhedsegenskaber.Vi har tidligere, i forbindelse med styrbarhed, set at det er muligt at nde en similartrans-formation, der opdeler tilstandsrummet i et styrbart og ikke styrbart underrum. Tilsvarenderesultat gælder for observerbarhed. I forbindelse med simultan styr- og observerbarhed harvi re underrum jvf. nedenstående sætning , der under tiden går under betegnelsen Kal-mans dekompositionssætning.Sætning: 1.25 For et lineært tidsinvariant system eksisterer en similartransformation, zt =Υxt, der bringer beskrivelsen på formen:
»
Φz Γz
ϕ⊤z ∆z
–
=
2
6
6
6
6
4
Φco Φ12 0 0 | Γco
0 Φco 0 0 | 0Φ31 Φ32 Φco Φ34 | Γco
0 Φ42 0 Φco | 0
ϕTco ϕT
co 0 0 | ∆
3
7
7
7
7
5
(1.392)Tilstandsrummet er inddelt i:zt =
2
6
6
4
zco
zco
zco
zco
3
7
7
5
(1.393)dvs. i et styr- og observerbart underrum, i et ikke styr- men observerbart underrum, i et styr- menikke observerbart underrum og endeligt i et underrum, der hverken er observerbart eller styrbart.Overføringen fra indgang til udgang er givet ved:Hy,u(q) = ϕ
⊤[qI − Φ]−1Γ = ϕ⊤co[qI − Φco]
−1Γco (1.394)og er identisk med overføringen gennem det delsystem, der både er observer- og styrbart. 2

87Bevis: Sætningen følger en su essiv anvendelse af sætning 1.23 og 1.13. 2Som sætning 1.25 antyder eksisterer der en meget tæt knytning mellem fælles faktorer i enoverføringsfunktion og simultan styr- og observerbarhed. Der gælder følgende sætning.Sætning: 1.26 Følgende udsagn er ækvivalente for et tidsinvariant lineært system, (Φ,Γ, ϕ,∆).• (Φ,Γ, ϕ,∆) er både styr- og observerbar.• (Φ,Γ, ϕ,∆) er minimal for ϕ⊤[qI − Φ]−1Γ + ∆.• ϕ⊤[qI − Φ]−1Γ + ∆ er irredu ibel.Der eksisterer en entydigt similartransformation mellem minimale realisationer. 2Bevis: Se (Kailath 1980) side 126. 2
CO-formOB-formM(1, n − 1)
A− C-formWc(o) = B(Φo)I
O-form−IΓI
A⊤−
Wo(ob) = I
Wc(ob) = M(1, n − 1)
Wc(co) = I
Wc(co) = M(1, n − 1)
Wc(c) = A−⊤−Wo(o) = A−∞
−
B(Φo)I
IB(Φc)
Wo(c) = IB(Φc)Figur 1.25. Transformationer mellem re kanoniske formerSimilartransformationerne mellem de i kapitel 1.4 omtalte kanoniske former kan bestemmesud fra gur 1.25. Bemærk spe ielt, at sætning 1.26 kan anvendes på den del af tilstands-rummet, der både er styr- og observerbart.Inden vi yderligere analyserer den simultane styr- og observerbarhed er det nyttigt at etab-lere en sammenhæng mellem styr- og observerbarhedsmatri erne. Ved at kombinere (1.168)og (1.355) kan det let vises at:M [1, j − 1] = Wo(j)Wc(j) M [2, j − 1] = Wo(j)ΦWc(j) (1.395)
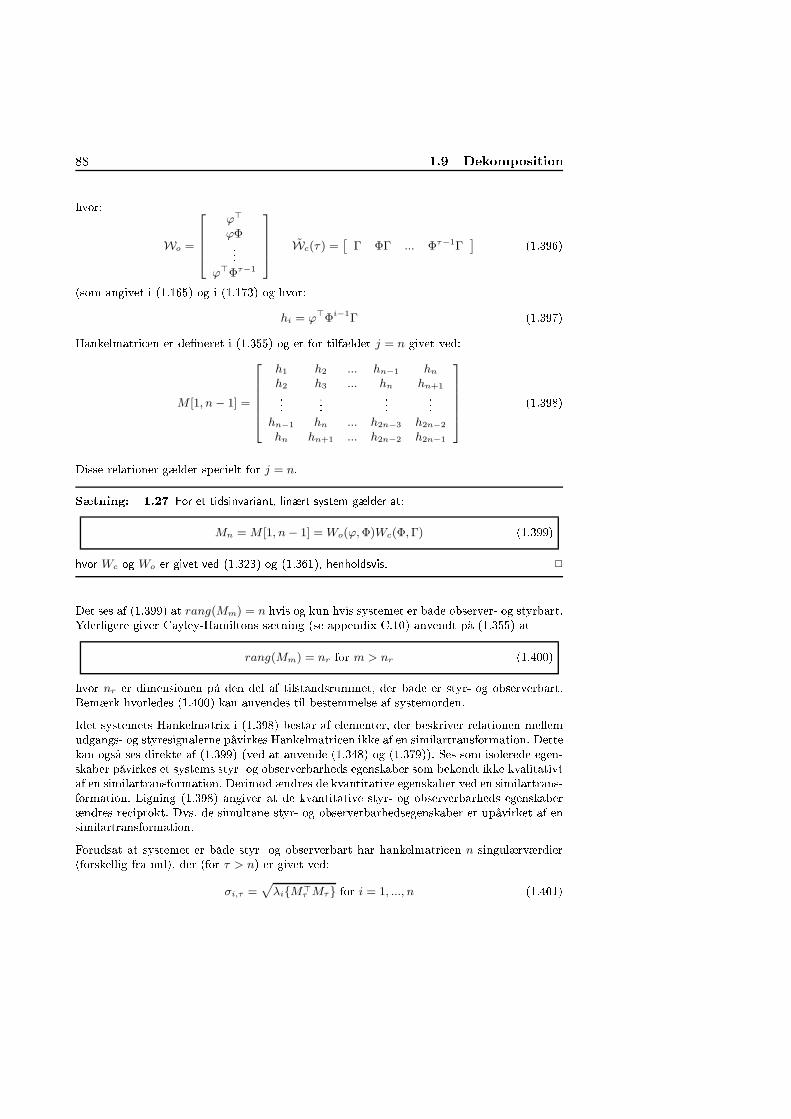
88 1.9 Dekompositionhvor:Wo =
2
6
6
6
4
ϕ⊤
ϕΦ...ϕ⊤Φτ−1
3
7
7
7
5
Wc(τ ) =ˆ
Γ ΦΓ ... Φτ−1Γ˜ (1.396)(som angivet i (1.165) og i (1.173) og hvor:
hi = ϕ⊤Φi−1Γ (1.397)Hankelmatri en er deneret i (1.355) og er for tilfældet j = n givet ved:
M [1, n− 1] =
2
6
6
6
6
6
4
h1 h2 ... hn−1 hn
h2 h3 ... hn hn+1... ... ... ...hn−1 hn ... h2n−3 h2n−2
hn hn+1 ... h2n−2 h2n−1
3
7
7
7
7
7
5
(1.398)Disse relationer gælder spe ielt for j = n.Sætning: 1.27 For et tidsinvariant, linært system gælder at:Mn = M [1, n− 1] = Wo(ϕ,Φ)Wc(Φ,Γ) (1.399)hvor Wc og Wo er givet ved (1.323) og (1.361), henholdsvis. 2Det ses af (1.399) at rang(Mm) = n hvis og kun hvis systemet er både observer- og styrbart.Yderligere giver Cayley-Hamiltons sætning (se appendix C.10) anvendt på (1.355) at
rang(Mm) = nr for m > nr (1.400)hvor nr er dimensionen på den del af tilstandsrummet, der både er styr- og observerbart.Bemærk hvorledes (1.400) kan anvendes til bestemmelse af systemorden.Idet systemets Hankelmatrix i (1.398) består af elementer, der beskriver relationen mellemudgangs- og styresignalerne påvirkes Hankelmatri en ikke af en similartransformation. Dettekan også ses direkte af (1.399) (ved at anvende (1.348) og (1.379)). Ses som isolerede egen-skaber påvirkes et systems styr- og observerbarheds egenskaber som bekendt ikke kvalitativtaf en similartransformation. Derimod ændres de kvantitative egenskaber ved en similartrans-formation. Ligning (1.398) angiver at de kvantitative styr- og observerbarheds egenskaberændres re iprokt. Dvs. de simultane styr- og observerbarhedsegenskaber er upåvirket af ensimilartransformation.Forudsat at systemet er både styr- og observerbart har hankelmatri en n singulærværdier(forskellig fra nul), der (for τ > n) er givet ved:σi,τ =
p
λiM⊤τ Mτ for i = 1, ..., n (1.401)

89(Bemærk iøvrigt, at M⊤ = M idet M er en hankelmatrix). Da nu:λiM⊤
τ Mτ = λiW⊤c W⊤
o WoWc (1.402)= λiWcW⊤
c W⊤o Wo = λiΣc
τ Σoτ (1.403)er:
σi,τ =p
λiΣcτ Σo
τ for i = 1, ..., n (1.404)Bemærk, at det er væsentlig lettere at bestemme singulærværdierne ud fra (1.404) end udfra denitionen. Matri en ΣcτΣo
τ er en n× n matrix, mens M⊤τ Mτ er en τ × τ -matrix.For et asymptotisk stabilt system eksisterer Σc
∞ og Σo∞ og systemets hankelsingulærværdierer deneret ved:
σiH(z) =p
λiΣc∞Σo∞ for i = 1, ..., n (1.405)hvor H(z) = ϕ⊤(zI − Φ)−1Γ + ∆. Systemets hankelsingulærværdier er følgelig en system-egenskab.Singulærværdierne (for systemet og for hankelmatri en) er invariant overfor en similartrans-formation idet:Σc
τ Σoτ = ΥΣc
τΣoτ Υ−1 (1.406)hvor Σo og Σc er gramianer for den transformerede beskrivelse. Idet Σc
τ og Σoτ afhænger afrealisering, mens egenværdierne af produktet er invariant, er det naturligt at undersøge omder eksisterer en beskrivelse, hvor singulær værdierne, σi,τ , i = 1, ..., n er ligeligt fordelt på
Σcτ og Σo
τ (dvs. på styr- og observerbarhed). En realisation hvor Σcτ og Σo
τ er identiske ogdiagonal betegnes som en balan eret realisation.Matri erne, Σoτ og Σc
τ er positive semidenite. Matri en, Σoτ kan under anvendelse af enCholesky faktorisering skrives som:
Σoτ = R
⊤τ Rτ (1.407)For en minimal repræsentation er (for τ ≥ n):
DetΣcτ Σo
τ = DetRτ ΣcτR
⊤τ > 0 (1.408)Da S = RΣc
τR⊤ er en positiv denit matrix og følgelig kan udtrykkes som:
S = UτPτU⊤τ (1.409)hvor:
U⊤τ Uτ = I P = diag(σ2
1,τ , σ22,τ , ..., σ
2n,τ ) (1.410)Lad:
Qτ = diag(√σ1,τ ,
√σ2,τ , ...,
√σn,τ ) (1.411)og lad os undersøge similartransformationen:
Υ = Q−1τ U
⊤τ Rτ (1.412)

90 1.10 Sensitivitet.Der gælder at (idet vi notationsmæssigt undlader argumentet τ ):Σc
τ = ΥΣcΥ⊤
= Q−1U
⊤RΣc
R⊤UQ
−1
= Q−1PQ
−1 = diag(σ1, σ2, ..., σn) (1.413)Σo
τ = Υ−⊤ΣoΥ−1
= QU⊤R
−⊤R
⊤RR
−1UQ
= QQ = diag(σ1, σ2, ..., σn) (1.414)altså atΣc
τ = Σoτ = diag(σ1, σ2, ..., σn) (1.415)Dermed er beskrivelsen bragt på en balan eret form. Vi har dermed bevist følgende sætning.Sætning: 1.28 Betragt en minimal beskrivelse og tidsintervallet [t1, t] hvor τ = t − t0. Dereksisterer en similartransformation,Υ = Q
−1τ U
⊤τ Rτ (1.416)der bringer beskriveslen på en balan eret repræsentation. Matri erne, Rτ , Uτ og Qτ er givet ved(1.407), (1.410) og (1.411), henholdsvis 2Bemærkning: 1.18 Ofte anvendes en asymptotisk horisont, dvs. τ → ∞. De asymptoti-ske gramianer, Σc
∞ og Σo∞, eksisterer (og er positiv denitte) hvis og kun hvis systemet erasymptotisk stabilt. 2Singulærværdierne for hankelmatri en (og i asymptoten systemets hankelsingulærværdier)er (i den balan erede beskrivelse) et mål for den enkelte tilstands betydning for den totaleoverføringsfunktion. Dette kan anvendes til modelreduktion. Antag at singulærværdierne ersorteret efter størrelse, således σ1 ≥ σ2 ≥ ... ≥ σn. Beskrivelsen redu eres ved at fjerne de
n−m tilstande, der svarer til de mindste singulær værdier. Hvis de asymptotiske gramianerligges til grund for modelreduktionen kan det vises jvf. (Middleton & G. Goodwin 1990)(eller se (Glover 1984)) at:||H(ejωTs) − H(ejωTs)||L∞ ≤ 2(σm+1 + ...+ σn) (1.417)1.10 Sensitivitet.Et andet vigtigt begreb i forbindelse med studier af dynamiske systemer er sensitivitets-eller følsomhedsbegrebet.Antag, at vi har fundet løsningen, x0
t , til dierensligningen:xt+1 = f(xt, θ0, t) xt0 = x0(θ0) (1.418)
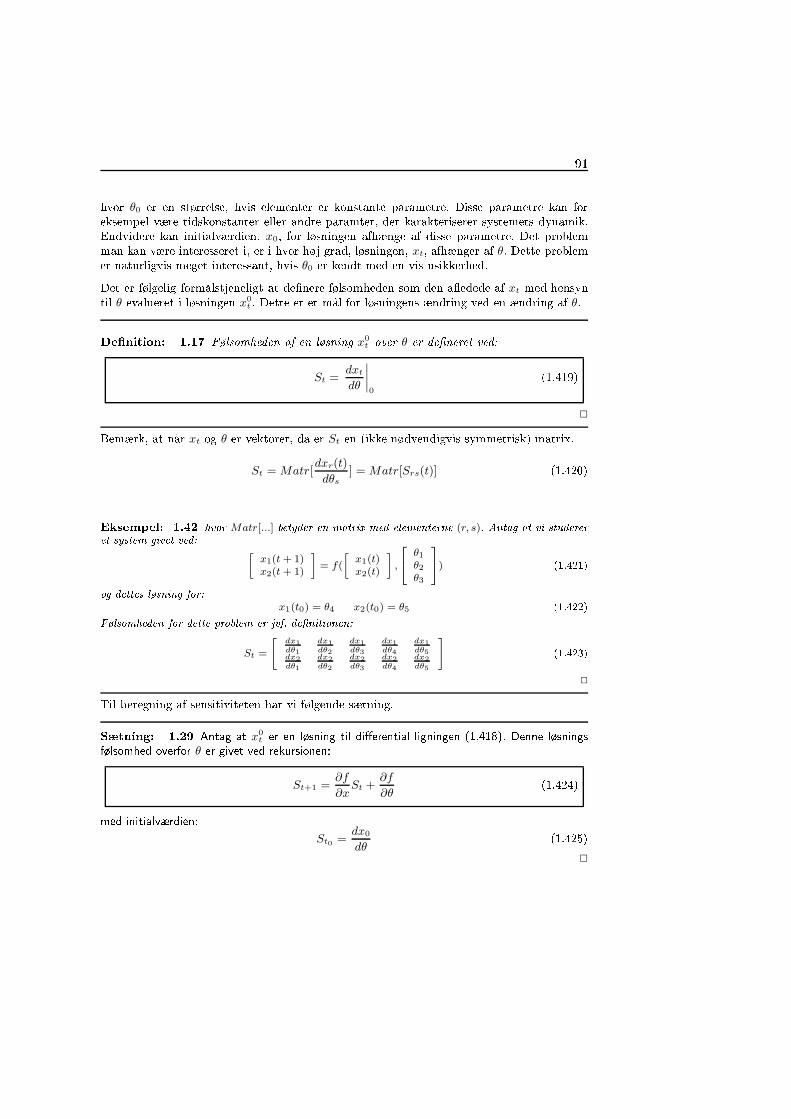
91hvor θ0 er en størrelse, hvis elementer er konstante parametre. Disse parametre kan foreksempel være tidskonstanter eller andre paramter, der karakteriserer systemets dynamik.Endvidere kan initialværdien, x0, for løsningen afhænge af disse parametre. Det problemman kan være interesseret i, er i hvor høj grad, løsningen, xt, afhænger af θ. Dette problemer naturligvis meget interessant, hvis θ0 er kendt med en vis usikkerhed.Det er følgelig formålstjeneligt at denere følsomheden som den aedede af xt med hensyntil θ evalueret i løsningen x0t . Dette er et mål for løsningens ændring ved en ændring af θ.Denition: 1.17 Følsomheden af en løsning x0
t over θ er deneret ved:St =
dxt
dθ
˛
˛
˛
˛
0
(1.419)2Bemærk, at når xt og θ er vektorer, da er St en (ikke nødvendigvis symmetrisk) matrix.
St = Matr[dxr(t)
dθs
] = Matr[Srs(t)] (1.420)Eksempel: 1.42 hvor Matr[...] betyder en matrix med elementerne (r, s). Antag at vi studereret system givet ved:»
x1(t + 1)x2(t + 1)
–
= f(
»
x1(t)x2(t)
–
,
2
4
θ1
θ2
θ3
3
5) (1.421)og dettes løsning for:x1(t0) = θ4 x2(t0) = θ5 (1.422)Følsomheden for dette problem er jvf. denitionen:
St =
"
dx1dθ1
dx1dθ2
dx1dθ3
dx1dθ4
dx1dθ5
dx2dθ1
dx2dθ2
dx2dθ3
dx2dθ4
dx2dθ5
# (1.423)2Til beregning af sensitiviteten har vi følgende sætning.Sætning: 1.29 Antag at x0
t er en løsning til dierential ligningen (1.418). Denne løsningsfølsomhed overfor θ er givet ved rekursionen:St+1 =
∂f
∂xSt +
∂f
∂θ(1.424)med initialværdien:
St0 =dx0
dθ(1.425)
2

92 1.10 Sensitivitet.Bevis: Med direkte udregninger har vi at:St+1 =
d
dθxt+1 =
d
dθf(xt, θ0, t) (1.426)
=∂f
∂xt
dxt
dθ+∂f
∂θ(1.427)
=∂f
∂xt
St +∂f
∂θ(1.428)Udtrykket for initialværdien for St følger direkte af denitionen på følsomhed. 2Eksempel: 1.43 For at illustrere sætningen vil vi i dette eksempel bestemme rekursionerne foren løsnings følsomhed ved direkte regninger. Betragt et andenordenssystem, givet ved:
x1(t + 1) = f1(x1(t), x2(t), θ1, θ2) (1.429)x2(t + 1) = f2(x1(t), x2(t), θ1, θ2) (1.430)med initialbetingelsen:
x1(t0) = 0 x2(t0) = 0 (1.431)Indfører vi notationen:frs =
∂fr
∂xs
˛
˛
˛
˛
0
grs =∂fr
∂θs
˛
˛
˛
˛
0
(1.432)kan vi let beregne:S11(t + 1) = f11S11(t) + f12S21(t) + g11(t) (1.433)S12(t + 1) = f11S12(t) + f12S22(t) + g12(t) (1.434)S21(t + 1) = f21S11(t) + f22S22(t) + g21(t) (1.435)S22(t + 1) = f21S12(t) + f22S22(t) + g22(t) (1.436)Hvis vi arrangerer disse rekursioner i matri er får vi ganske som i sætning 1.29:»
S11(t + 1) S12(t + 1)S21(t + 1) S22(t + 1)
–
= (1.437)»
f11(t) f12(t)f21(t) f22(t)
– »
S11(t) S12(t)S21(t) S22(t)
– (1.438)+
»
g11(t) g12(t)g21(t) g22(t)
– (1.439)Disse rekursioner startes i:»
S11(t0) S12(t0)S21(t0) S22(t0)
–
=
»
0 00 0
– (1.440)2Bemærkning: 1.19 Hvis vi tilsvarende betragter et tidskontinuert dynamisk system, derer beskrevet ved dierentialligningen:
x(t) = f(x(t), θ, t) (1.441)

93med initial betingelsen:x(t0) = x0(θ) (1.442)opfylder løsningens følsomhed dierentialligningen:
S(t) =∂f
∂xS(t) +
∂f
∂θ(1.443)med initialværdien:
S(t0) =dx(t0)
dθ(1.444)
2
94 1.10 Sensitivitet.
Kapitel 2Deterministisk ReguleringI dette afsnit skal vi resumeer nogle resultater fra den deterministiske kontrolteori. Inten-tionen med dette kapitel er at skabe mulighed for en sammenligning mellem de stokastiskeregulatorer med tilsvarende, der er baseret på et deterministisk grundlag. Kapitlet indledesmed en gennemgang af regulering af systemer beskrevet på intern form eller på tilstandsform(eller state spa e form). Først betragtes regulering baseret på en polpla erings tankegang ogderefter beskrives en optimal regulering. Den sidste reguleringsform har naturligvis direkterelationer til statisk og dynamisk optimering. Kapitlet afsluttes med en gennemgang af re-gulatorer, hvis dimensionering er baseret på en ekstern (eller en input-output) beskrivelseaf reguleringsobjektet.2.1 TilstandstilbagekoblingReguleringsproblemet spe i eres ved at angive systemdynamik, påvirkninger, kriterium ogrestriktioner.Systemdynamik: Vi antager i dette afsnit, at systemet kan beskrives ved hjælp at følgendepro esligning:xt+1 = Φxt + Γut (2.1)I forbindelse med polpla eringsregulatorerne antages systembeskrivelsen at være lineær ogtidsinvariant, hvorimod der kan relakseres for det sidste krav i sammenhæng med optimalregulering.Påvirkninger: Idet tankegangen er deterministisk, tages der ikke ekspli it hensyn til deforstyrrelser, der påvirker systemet. Under en erkendelse af at der eksisterer forstyrrelser,anvender vi tilbagekobling fra systemets tilstande, idet vi herved redu eret forstyrrelsernesindydelse. Vi inkluderer med andre ord denne erkendelse i de restriktioner, vi sætter påvores løsning på problemet. 95
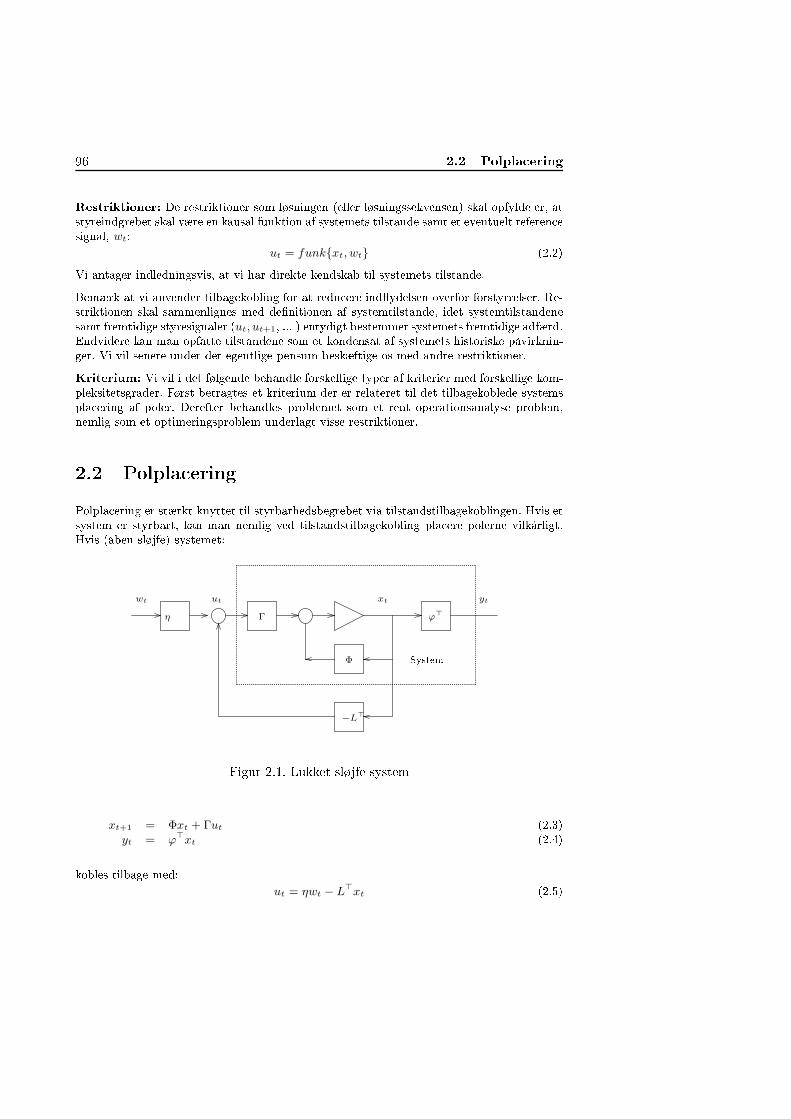
96 2.2 Polpla eringRestriktioner: De restriktioner som løsningen (eller løsningssekvensen) skal opfylde er, atstyreindgrebet skal være en kausal funktion af systemets tilstande samt et eventuelt referen esignal, wt:ut = funkxt, wt (2.2)Vi antager indledningsvis, at vi har direkte kendskab til systemets tilstande.Bemærk at vi anvender tilbagekobling for at redu ere indydelsen overfor forstyrrelser. Re-striktionen skal sammenlignes med denitionen af systemtilstande, idet systemtilstandenesamt fremtidige styresignaler (ut, ut+1, ... ) entydigt bestemmer systemets fremtidige adfærd.Endvidere kan man opfatte tilstandene som et kondensat af systemets historiske påvirknin-ger. Vi vil senere under det egentlige pensum beskæftige os med andre restriktioner.Kriterium: Vi vil i det følgende behandle forskellige typer af kriterier med forskellige kom-pleksitetsgrader. Først betragtes et kriterium der er relateret til det tilbagekoblede systemspla ering af poler. Derefter behandles problemet som et rent operationsanalyse problem,nemlig som et optimeringsproblem underlagt visse restriktioner.2.2 Polpla eringPolpla ering er stærkt knyttet til styrbarhedsbegrebet via tilstandstilbagekoblingen. Hvis etsystem er styrbart, kan man nemlig ved tilstandstilbagekobling pla ere polerne vilkårligt.Hvis (åben sløjfe) systemet:
−L⊤
wt
η
ut
Γ
xt
Φ
ϕ⊤System yt
Figur 2.1. Lukket sløjfe systemxt+1 = Φxt + Γut (2.3)yt = ϕ
⊤xt (2.4)kobles tilbage med:
ut = ηwt − L⊤xt (2.5)

2.2.1 Regulering af system på kanonisk form 97er lukket sløjfe systemet givet ved:xt+1 =
“
Φ − ΓL⊤”
xt + Γηut (2.6)Designpro eduren er nu at vælge L, således at lukket sløjfe systemet får de ønskede poler,dvs. således at egenværdierne af:ΦL = Φ − ΓL⊤ (2.7)antager de spe i erede værdier.2.2.1 Regulering af system på kanonisk formEthvert system kan, under forudsætning af at det er styrbart, transformeres til en regulatorkanonisk form. Betragt derfor i det følgende et system, der er beskrevet i regulator kanoniskform, dvs. beskrevet af:
Φc =
2
6
6
6
6
6
4
−a1 −a2 ... −an−1 −an
1 0 ... 0 00 1 ... 0 0... ... . . . ... ...0 0 ... 1 0
3
7
7
7
7
7
5
Γc =
2
6
6
6
4
10...0
3
7
7
7
5
(2.8)ϕ
⊤c = (b1 − b0a1, b2 − b0a2, ..., bn − b0an) ∆c = b0 (2.9)hvor
C(z) = zn + a1z
n−1 + ...+ an = 0 (2.10)er den karakteristiske ligning for Φc. Antag nu, at målet er en lukket sløjfe med et karakte-ristisk polynomium givet ved:α(z) = z
n + α1zn−1 + ...+ αn (2.11)Indføres vektorerne:
a = (a1, a2, ..., an)⊤ α = (α1, α2, ..., αn)⊤ (2.12)kan det let (ved direkte indsættelse i Φc − ΓcL⊤) veri eres at tilbagekoblingen:
ut = ηwt − L⊤xt (2.13)hvor:
L =
2
6
6
6
4
α1 − a1
α2 − a2...αn − an
3
7
7
7
5
= α− a (2.14)
98 2.3 Optimal tilstandstilbagekoblingnetop opfylder dette mål. Bemærk, at systemets nulpunkter ikke påvirkes af denne tilbage-kobling, idet:Hy,w(q) = η
b0 + b1q−1 + ...+ bnq
−n
1 + α1q−1 + ... + αnq−1(2.15)Dog er det muligt (matematisk) at pla ere en lukketsløjfe pol lige under et systemnulpunktog derved usynliggøre nulpunktet i overføringen fra wt til yt. Dette kan være særdeles farligt,hvis det pågældende nulpunkt ikke er veldæmpet.2.2.2 Polpla ering for skalart systemPå grund af den enkle pro edure i forbindelse med design af polpla eringstilbagekoblin-ger for systemer på regulatorkanonisk form, er det nærliggende at transformere ovenstå-ende pro edure til det generelle tilfælde. Betragt derfor et styrbart skalart system medstyrbarhedsmatri en Ws. For regulatorkanonisk form gælder der at styrbarhedsmatri en er
Ws(Φc,Γc) = A−T− . Similartransformationen, der bringer beskrivelsen på regulatorkanoniskform, er givet ved:
Υ = A−T− W
−1s (2.16)Der gælder derfor at en tilbagekobling af systemtilstandene med:
L = W−Ts A−1
− α− a (2.17)giver de ønskede lukketsløjfe poler. Denne formel betegnes som Bass-Gura's formel. Ved atanvende Cayley-Hamiltons sætning kan denne omformuleres til A kermanns formel.L = α(Φ)⊤W−T
s
2
6
6
6
4
0...01
3
7
7
7
5
(2.18)Af disse to udtryk fremgår meget tydeligt vigtigheden af styrbarhedsmatri ens egenskaber.Der eksisterer lærerbøger, der denerer styrbarhed som identisk med muligheden for vilkår-ligt at kunne pla ere et systems lukketsløjfe poler.2.3 Optimal tilstandstilbagekoblingI dette afsnit vil vi beskæftige os med optimal regulering af et deterministisk system. Vi vilindledningsvis behandle det generelle problem. Derefter vil vi spe ialisere fremstillingen tilkun at omfatte regulering af lineære systemer. Herunder vil vi først udvikle en regulator, derer baseret på et simpelt kvadratisk kriterium. Konstruktionen af denne regulator vil afslørede prin ipielle problemer i forbindelse med LQ-regulering.Designet af optimale regulatorer er baseret på metoder fra operationsanalysen, spe ielt denmatematiske programmering. Vi har under 2.2 angivet systemdynamik, påvirkninger ogrestriktioner. Vi skal her kun bestemme kriteriet for reguleringen.

99Kriterium: Vi vil i det følgende behandle forskellige typer af kriterier med forskellige graderaf kompleksitet. I det simpleste tilfælde (minimalvarians tilfældet) vil vi regulere systemetsåledes, at tilstandene ligger så tæt ved origo som muligt, det vil sige at vi skal bestemmeen sekvens af styresignaler således at det skalare kriterium:J0 =
NX
i=t
x⊤i Q1xi (2.19)har sit minimum. (Q1 er en positiv semidenit symmetrisk matrix). Imidlertid fører enregulator baseret på ovenstående kriterium ofte til uforholdsmæssigt store styreeekter.Derfor indføres ofte en straf på styreeekten, dvs. der her anvendes kriteriet:
J0 =NX
i=t
x⊤i Q1xi + u
⊤i Q2ui (2.20)(her er Q2 en positiv semidenit matrix). For at dække dette brede spektrum af mulighedervil vi først betragte kriterier, der kan skrives på formen:
J(t) =
NX
i=t
I(i) (2.21)hvor:I(t) = I [xt, ut, t] (2.22)er det til tidspunktet t relaterede tab. Det essentielle er, at kriteriet additivt består af bi-drag relateret til sampling tidspunkterne. Vores generelle minimeringsproblem, der beståri at bestemme en sekvens uiN
t af styresignaler (eller beslutningsvariable), kan derfor an-skueliggøres som i gur 2.2.xt+3xt−1
ut−1
xt
ut
xt+1
ut+1
xt+2
ut+2
It−1 It It+1 It+2Figur 2.2. Dynamisk optimerings problemSætning: 2.1 Antag at systemtilstandene udvikles efter:xt+1 = f [xt, ut, t] (2.23)og at kriteriet er additivt:J(t) =
NX
i=t
I(i) (2.24)
100 2.3 Optimal tilstandstilbagekoblingDen optimale værdi for kriteriet:V (xt) = min
uiNt
J(t) (2.25)er givet ved (Bellmans ligning) rekursionen:V (xt) = min
ut
I(xt, ut, t) + V (xt+1) (2.26)2Bevis: Vi opskriver direkte at:
V (xt) = minuiN
t
J(t) (2.27)= min
ut,uiNt+1
I(xt, ut, t) + J(t+ 1) (2.28)Idet ut+1 og dermed uiNt+1 ikke påvirker I(xt, ut, t) har vi at:
V (xt) = minut
(
I(xt, ut, t) + minuiN
t+1
J(t+ 1)
) (2.29)= min
ut
I(xt, ut, t) + V (xt+1) (2.30)2Bemærk, at med Bellmann's ligning kan optimeringsproblemet transformeres fra at væreen bestemmelse af en sekvens af styresignaler til en bestemmelse af et styresignal (til ettidspunkt). Bestemmelsen af dette signal sker under antagelsen, af at den efterfølgendestyring er optimal. I denne forbindelse skal det erindres, at ut+1 ganske vist ikke påvirker
I(xt, ut, t), men at ut i høj grad påvirker V (xt+1) igennem pro esligningen.2.3.1 Det Basale LQ-ProblemVi vil nu fokusere på hvordan vi på optimal måde kan regulere et lineært dynamisk systemefter et kvadratisk kriterium af formen:J0 =
NX
i=t
x⊤i Q1xi + u
⊤i Q2ui (2.31)Bemærk, at vægtmatri erne Q1 og Q2 meget vel kan være tidsvarierende.Vi antager i det følgende, at systemet er lineært og kan beskrives med pro esligningen:
xt+1 = Φxt + Γut (2.32)I de este anvendelser er systemet tidsinvariant, hvilket blandt andet vil sige at matri erne,Φ og Γ er konstante. Der er imidlertid ikke noget i denne udledning der hindrer at systemetkan være tidsvarierende. Vi har blot i denne fremstilling undladt tidsargumentet for Φ ogΓ. Ved anvendelse af Bellmans ligning har vi umiddelbart:

2.3.1 Det Basale LQ-Problem 101Sætning: 2.2 Den optimale løsning til det basale LQ-problem er givet ved:ut = −L⊤
xt (2.33)hvor forstærkningen er:Lt = Φ⊤
St+1Γ(Q2 + Γ⊤St+1Γ)−1 (2.34)og hvor St er en positiv semidenit matrix og er givet ved rekursionen:
St = Φ⊤St+1Φ (2.35)
−Φ⊤St+1Γ(Q2 + Γ⊤
St+1Γ)−1Γ⊤St+1Φ +Q1 (2.36)
= (Φ − ΓL⊤t )⊤St+1Φ +Q1 (2.37)
= (Φ − ΓL⊤t )⊤St+1(Φ − ΓL⊤
t ) + LtQ2L⊤t +Q1 (2.38)med initial betingelsen:
SN+1 = 0 (2.39)Med denne styrestrategi vil det minimale tab være givet ved:V (xt) = x
⊤t Stxt (2.40)
2Bevis: Vi starter med at bestemme det optimale styresignal for t = N og arbejder ostilbage. Vi har direkte at kriteriet:J(N) = x
⊤NQ1xN + u
⊤NQ2uN (2.41)har sit optimum for:
uN = 0 (2.42)og at:V (xN) = x
⊤NQ1xN (2.43)Dette er i umiddelbar overensstemmelse med sætningen, når:
SN+1 = 0 (2.44)Antag nu, at vi har fundet det optimale styresignal for t + 1, t+ 2, ..., N og skal bestemmedet optimale ut. Ifølge Bellmans ligning har vi til bestemmelse af ut følgende ligning:V (xt) = min
ut
n
x⊤t Q1xt + u
⊤t Q2ut + V (xt+1)
o (2.45)Inspireret af løsningen til tidspunktet N og spe ielt af appendix D angående minimering afkvadratiske former gætter vi på at V (xt+1) er kvadratisk i xt+1, altså at:V (xt+1) = x
⊤t+1St+1xt+1 (2.46)hvor St+1 er en positiv semidenit matrix. Indføres betegnelsen:
zt =
»
xt
ut
– (2.47)

102 2.4 Observergælder med de nævnte antagelser at:V (xt) = min
ut
z⊤t
»
Q1 00 Q2
–
zt + x⊤t+1St+1xt+1
ff (2.48)der med indsættelse af pro esligningen giver at:V (xt) = min
ut
z⊤t
»
Q1 00 Q2
–
zt + (Φxt + Γut)⊤St+1(Φxt + Γut)
ff (2.49)ellerV (xt) = min
ut
z⊤t
»
Q1 00 Q2
–
zt + z⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
zt
ff (2.50)Sidste lighedstegn fremkommer ved anvendelse af lemma D.1 fra appendix D. Ved anvendelseaf lemma D.2 fra appendix D har vi at minimum optræder for:ut = −Q2 + Γ⊤
St+1Γ−1Γ⊤St+1Φxt (2.51)Lemma D.2 giver endvidere at minimum af kriteriet er givet ved:
V (xt) = x⊤t Stxt (2.52)hvor St er bestemt ved rekursionen:
St = Φ⊤St+1Φ − Φ⊤
St+1Γ(Q2 + Γ⊤St+1Γ)−1Γ⊤
St+1Φ +Q1 (2.53)Idet V (xt) er kvadratisk i xt er sætningen herved bevist ved hjælp af induktion. 22.4 ObserverI det tidligere afsnit har vi betragtet tilstandstilbagekoblinger, der forudsatte et kendskabtil systemets tilstande. Det er imidlertid ikke altid muligt at måle disse direkte og vi skal idette afsnit se på nogle metoder til bestemmelse af systemtilstandene ud fra en registreringaf målesignaler.Beregningerne ovenfor i forbindelse med kriteriet for observerbarhed giver os en mulighedfor at rekonstruere systemtilstanden ud fra målinger. Den resulterende rekonstruktion erimidlertid følsom for forstyrrelser. Vi skal derfor se på en anden måde, hvor man ved hjælpaf en model af systemet rekonstruerer tilstandene. Antag at det forelagte observerbare systemer givet ved:xt+1 = Φxt + Γut (2.54)yt = ϕ
⊤xt (2.55)eller grask som præsenteret i gur 2.3. Eftersom vi kender Φ,Γ og ϕ, kan vi bygge en modelfor systemet. Eektiviteten af den resulterende tilstandsrekonstruktionen kan vurderes vedat studere forskellen (fejlen) mellem udgangssignalerne fra det virkelige system og modellen.
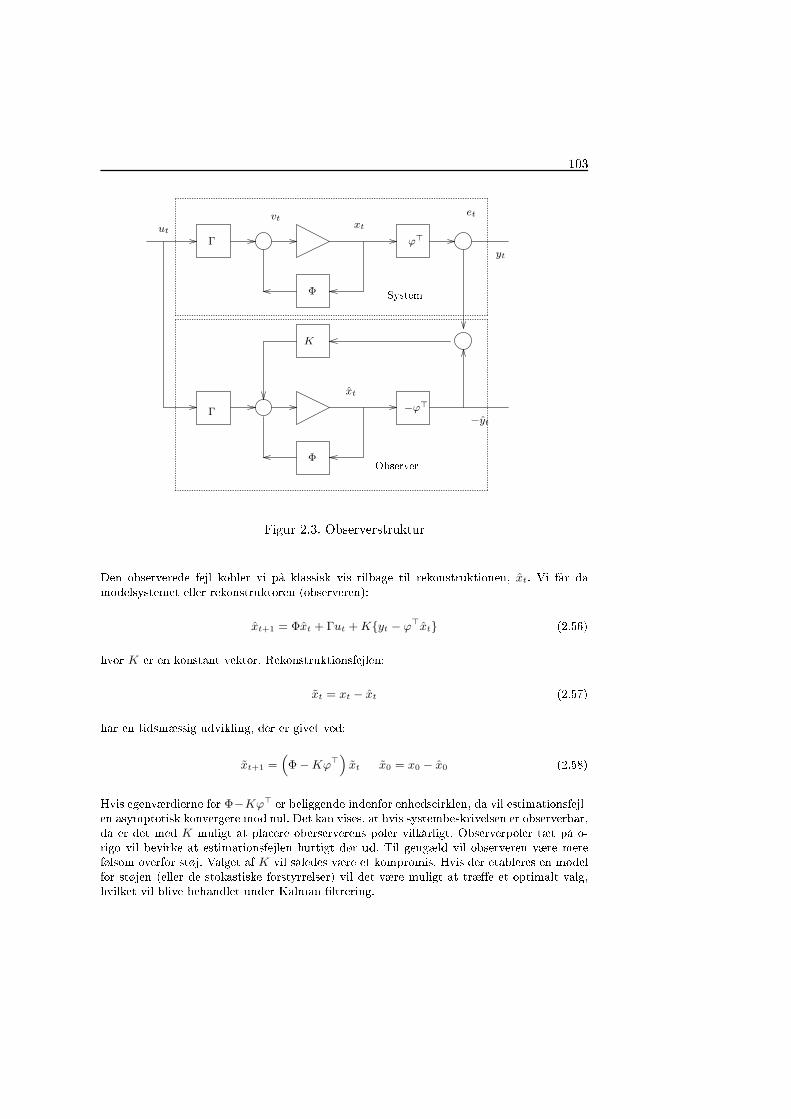
103Systemut
Γ
vtxt
ϕ⊤
et
yt
Φ
Γ
Φ
xt
−ϕ⊤
−yt
K
ObserverFigur 2.3. ObserverstrukturDen observerede fejl kobler vi på klassisk vis tilbage til rekonstruktionen, xt. Vi får damodelsystemet eller rekonstruktoren (observeren):xt+1 = Φxt + Γut +Kyt − ϕ
⊤xt (2.56)hvor K er en konstant vektor. Rekonstruktionsfejlen:
xt = xt − xt (2.57)har en tidsmæssig udvikling, der er givet ved:xt+1 =
“
Φ −Kϕ⊤”
xt x0 = x0 − x0 (2.58)Hvis egenværdierne for Φ−Kϕ⊤ er beliggende indenfor enheds irklen, da vil estimationsfejl-en asymptotisk konvergere mod nul. Det kan vises, at hvis systembeskrivelsen er observerbar,da er det med K muligt at pla ere oberserverens poler vilkårligt. Observerpoler tæt på o-rigo vil bevirke at estimationsfejlen hurtigt dør ud. Til gengæld vil observeren være merefølsom overfor støj. Valget af K vil således være et kompromis. Hvis der etableres en modelfor støjen (eller de stokastiske forstyrrelser) vil det være muligt at træe et optimalt valg,hvilket vil blive behandlet under Kalman ltrering.
104 2.4 Observer2.4.1 Observer for system på kanonisk formEthvert system kan, under forudsætning af at det er observerbart, transformeres til enobserverkanonisk form. Betragt derfor i dette afsnit et sådant system beskrevet af:Φo =
2
6
6
6
4
−a1 1 ... 0... . . .−an−1 0 ... 1−an 0 ... 0
3
7
7
7
5
Γo =
2
6
6
6
4
b1 − b0a1
b2 − b0a2...bn − b0an
3
7
7
7
5
(2.59)ϕ
⊤o = (1, 0, ..., 0) ∆o = b0 (2.60)Antag, at målet med observeren er at en rekonstruktionsfejl skal forsvinde som angivet meddet karakteristiske polynomium:
α(z) = zn + α1z
n−1 + ...+ αn (2.61)Det kan let (ved direkte indsættelse) indses at observeren er givet ved følgende tilbagekoblingfra fejlen:K =
2
6
6
6
4
α1 − a1
α2 − a2...αn − an
3
7
7
7
5
= α− a (2.62)2.4.2 Observer for skalart systemLad os nu betragte et observerbart skalart system i det generelle tilfælde. Som det fremgikaf det forrige afsnit er design af observere særdeles simpelt, når systemet er på observerkano-nisk form. I det generelle tilfælde kan tilbagekoblingen (i observeren) ndes ved at betragteden similartransformation, der fører beskrivelsen over i en observerkanonisk form. For obser-verkanonisk form gælder at observerbarhedsmatri en opfylder at, Wo(okf) = A−1
− . Følgeliger similartransformationen givet ved:Υ = A−Wo (2.63)Dvs. tilbagekoblingen, K, i observeren for et skalart system med observerbarheds matri en,
Wo, er givet ved:K = W
−1o A−1
− α− a (2.64)der kaldes Bass-Gura's observerformel. Som i forbindelse med design af regulatorer kandenne vha. Cayley-Hamilton's sætning omformes til A kermanns observerformel:

105K = α(Φ)W−1
o
2
6
6
6
4
00...1
3
7
7
7
5
(2.65)Som det tydeligt fremgår af ovenstående to udtryk er det en nødvendig (og tilstrækkelig)betingelse at systemet er observerbart for at vi kan pla ere observerpolerne vilkårligt. Dereksisterer lærebøger, der denerer observerbarhed som muligheden for vilkårligt at kunnepla ere observerpolerne.2.5 Observerbaseret reguleringI de tidligere afsnit om tilstandstilbagekobling blev det (ofte lidt urealistisk) antaget atsystemets tilstande var kendt. Hvis tilstandsvektoren, xt, ikke er kendt er man i stedetnødsaget til at lave en tilstandstilbagekobling fra et estimat af tilstandsvektoren.ut = ηwt − L
⊤xt (2.66)
= ηwt − L⊤xt + L
⊤xt (2.67)Systemet, som består af reguleringobjektet (åbensløjfe systemet), observer og tilbagekob-ling (fra tilstandsestimater) har ordenen 2n. Dette lukketsløjfe system kan beskrives medtilstandene xt og xt = xt − xt:
»
xt+1
xt+1
–
=
»
Φ − ΓL⊤ ΓL⊤
0 Φ −Kϕ⊤
– »
xt
xt
–
+
»
ηΓ0
–
wt (2.68)yt =
ˆ
ϕ⊤ 0˜
»
xt
xt
– (2.69)med overføringsfunktionen (fra indgang til udgang):H(q) =
ˆ
ϕ⊤ 0˜
»
qI − (Φ − ΓL⊤) −ΓL⊤
0 qI − (Φ −Kϕ⊤)
–−1 »ηΓ0
– (2.70)ellerH(q) = ϕ
⊤h
qI − (Φ − ΓL⊤i−1
Γ (2.71)Vi noterer altså, at vi får samme overføringsfunktion, som da vi ikke rekonstruerede. Videreser vi, at tilstandene svarende til rekonstruktionsfejlen ikke er styrbare, hvilket bl.a. visersig i overføringsfunktionen, der kun har ordenen n.2.6 Eksterne regulatorerSom tidligere nævnt består reguleringsproblemet i en spe ikation af systemdynamik, på-virkninger, kriterium og restriktioner. Antag, at vores system kan beskrives ved en overfø-ringsfunktion fra styresignalet til udgangen yt overlejret af en forstyrrelse vt. Vores model

106 2.6 Eksterne regulatorer
Tilbagekobling
ut
Γxt
ϕ⊤
yt
Φ
Γ
Φ
−ϕ⊤
−L⊤
K
xt
SystemObserverFigur 2.4. Lukketsløjfe system bestående af reguleringsobjekt, observer og tilbage-koblinger med andre ord givet ved:
yt = Hs(q)ut + vt (2.72)=
B(q−1)
A(q−1)ut + vt (2.73)hvor A og B er polynomier i tilbageskiftoperatoren, q−1. Dvs.
B(q−1) = b0 + b1q−1 + ...+ bnb
q−nb (2.74)
A(q−1) = 1 + a1q−1 + ...+ anq
−1 (2.75)Bemærk, at en tidsforsinkelse gennem systemet på k trin giver sig til udtryk i at bi = 0 fori = 0, ..., k − 1 og bk 6= 0. Da gælder altså:
B(q−1) = q−kB(q−1) (2.76)hvor:
B(q−1) = b0 + b1q−1 + ...+ bnb
q−nb (2.77)Bemærk: nb = k + nb.Forstyrrelsen vt er inkluderet med henblik på vores senere arbejde med stokastiske regu-leringssystemer. I deterministisk reguleringsteori inkluderes forstyrrelsernes karakteristika

107Hs(q)
ut
vt
ytFigur 2.5. Blokdiagram for ekstern systembeskrivelse med styresignalet, ut og for-styrrelsen, vt.ikke i designfasen. Forstyrrelsen, vt, skal nærmest fortolkes som resultatet af forstyrrelser-nes påvirkning set fra udgangen af systemet. I vort arbejde med eksterne regulatorer vilvi være begrænset til kun at arbejdet med lineære regulatorer. Dvs. vores styresignal be-står af to bidrag en ltreret udgave af det tilbagekoblede signal samt en ltreret version afreferen esignalet wt. Dvs.:ut = Dy(q)yt +Dw(q)wt + u0 (2.78)hvor Dy og Dw er rationelle overføringsfunktioner. Denne generelle regulator kan også (vedat multipli ere med mindste fælles nævner) bringes på formen:
R(q−1)ut = Q(q−1)wt − S(q−1)yt + ξ0 (2.79)hvor Q, R og S er polynomier i tilbageskiftoperatoren q−1. Det vil f.eks. sige at:R(q−1) = r0 + r1q
−1 + ...+ rnrq−nr (2.80)Bemærk at i formel (2.78) og (2.79) er der inkluderet et bidrag u0 hhv. ξ0 til udkompensationaf konstante forstyrrelser. Bemærk deslige at R i denne fremstilling ikke nødvendigvis ermonisk. (At et polynomium er monisk vil sige at dets ledende koe ient er 1. F.eks. erpolynomiet A(q−1) = 1 + a1q
−1 + ... monisk. Det kan også skrives som at A(0) = 1).Vi vil nu angive det tilbagekoblede systems karakteristika. Indsættes udtrykket for regula-toren 2.79 i udtrykket for systembeskrivelsen ndes at overføringsfunktionerne til udgangener givet ved:(AR+ BS)yt = BQwt +RAvt +Bξ0 (2.81)mens overføringerne til styresignalet er givet ved:(AR+ BS)ut = AQwt − SAvt + Aξ0 (2.82)Bemærk, at det tilbagekoblede systems poler er bestemt af det karakteristiske polynomium
C = AR+ BS (2.83)2.7 Digital PID-regulatorPID-regulatoren er den mest udbredte regulator hvilket skyldes dels dens simpelhed og delsdens ringe krav til kendskabet af systemet.

108 2.7 Digital PID-regulatorBA
utwt
Q
−S
vtξ0
yt1R
Figur 2.6. Blokdiagram for generel regulator baseret på ekstern beskrivelseSom navnet antyder består PID-regulatoren af tre bidrag nemlig et proportionalled, et in-tegrationsled samt et dierentierende led. Den digitale PID-regulator kan altså skrives påformenut = D(q)[wt − yt] (2.84)hvor:
D(q) = k1 +k2
1 − q−1+ k3(1 − q
−1) (2.85)Det integrerende led (k2 6= 0) indføres sædvanligvis for at kompensere for en konstantforstyrrelse. Under den negative fasedrejning forringer et sådant integrerende led det tilba-gekoblede systems dynamiske egenskaber. Det dierentierende led (k3 6= 0) indføres for atforbedre det tilbagekoblede systems dynamiske egenskaber, dvs. dets hurtighed. Vi kan me-get let sammenstille de tre led hvorved regulatoren beskrives på den såkaldte lærebogsform:D(q) =
α0 + α1q−1 + α3q
−2
1 − q−1=
δ(q−1)
∆(q−1)(2.86)Ved at identi ere polynomierne Q,R og S fra den generelle regulatorstruktur, dvs.
BA
wt
D
ut
vt
yt
−1Figur 2.7. Prin ip i et PID styret systemR(q−1) = ∆(q−1) Q(q−1) = δ(q−1) S(q−1) = δ(q−1) (2.87)kan vi indsætte i udtrykkene for de lukkede sløjfer, hvorved udgangen er givet ved
(A∆ + Bδ)yt = Bδwt + A∆vt (2.88)

109mens styresignalet er karakteriseret ud fra rekursionen:(A∆ + Bδ)ut = Aδ(wt − vt) (2.89)Det bemærkes, at (lukket sløjfe) systemets poler er bestemt af:
C = A∆ + Bδ (2.90)Design af PID-regulatorer kan være baseret på forskellige prin ipper som f.eks. frekvensana-lytiske metoder, steprespons metoder eller stabilitetsmargin (se f.eks. (Andersen 1978) eller(Franklin, Poell & Workman 1990)). I denne fremstilling vil vi nøjes med at angive Ni hols-Zieglers indstillingsregeler. Disse eksisterer i to versioner, en baseret på reguleringsobjektetstrinrespons (trinresponsmetoden) og en baseret på stabilitets margin for det lukkede system(stabilitetsgrænsemetoden).Lad PID-regulatoren være ved:D(q) = Kp
„
1 +Ts
Ti
1
1 − q−1+Td
Ts
(1 − q−1)
« (2.91)dvs. parametriseret ved Kp, Ti og Td. Bemærk den simple relation til parametriseringerne i2.85 og 2.86.I trinresponsmetoden bestemmes to parametre, der er beskrivende for reguleringsobjektet,nemlig reaktionsraten, r og reaktionstiden, tl. (se denition i tabel 1.6). Ud fra disse toparametre bestemmes parametrene i P, PI eller PID regulatoren som angivet i tabel 2.1.Der er klart en nødvendighed at reguleringsobjektet er stabilt for at denne metode kananvendes.Kprtl Ti TdP 1PI 0.9 3tlPID 1.2 2tl 0.5tlTabel 2.1. Indstillingsregeler efter trinresponsmetoden
Kp Ti TdP 0.5KuPI 0.45Ku56 tuPID 0.6Ku 0.5tu
18 tuTabel 2.2. Indstillingsregeler efter stabilitetgrænsemetodenVed stabilitetsgrænsemetoden lukkes sløjfen med en P-regulator og forstærkningen øgesindtil det lukkede system os illerer. Den pågældende forstærkning betegnes med Ku mens

110 2.8 Generel Polpla eringtu betegner perioden i os illationerne. Parametrene i P, PI eller PID regulatoren vælgessom angivet i tabel 2.2. Det er evident, at det ikke er muligt at indstille en regulator efterdisse prin ipper for alle slags systemer. Det vil f.eks. af sikkerhedsmæssige eller økonomiskegrunde være umuligt at udføre det beskrevne eksperiment.I visse tilfælde kendes typen af referen esignal, wt eller forstyrrelse, vt. Der kan f.eks. væretale om trinfunktioner eller rampefunktioner. Hvis der eksisterer en model for regulerings-objektet (dvs. A og B kendes) kan der med et valgt sæt af regulatorparametre udføres ensimulation med de angivne påvirkninger. Kan performan e af den lukkede sløjfe beskrivesmed en enkelt skalar (der kan være fremkommet ved en sammenvægtning af ere), vil detvære muligt at anvende en optimeringsroutine til bestemmelse af de optimale regulatorpa-rametre. En sådan metode betegnes som en parametrisk optimering.2.8 Generel Polpla eringAntag, at det forelagte system på sædvanlig ekstern måde kan beskrives ved:
yt =B(q−1)
A(q−1)ut + v0 (2.92)hvor v0 er en konstant forstyrrelse. Vi har i dette afsnit, der omhandler deterministiskemetoder, inkluderet en forstyrrelse for at knytte forbindelsen til behandlingen af stokastiskesystemer. Bemærk, at tidsforsinkelsen gennem systemet er inkluderes i B (jvf. (2.76)) Måletmed reguleringen er at opnå en overføring fra referen e signalet, wt, til systemudgangen, yt,der i lukketsløjfe kan beskrives ved (referen e) modellen:
Hm(q−1) =Bm(q−1)
Am(q−1)(2.93)d.v.s. at der i lukket sløjfe skal gælde at fejlen, em
t , at:e
mt = yt − Bm(q−1)
Am(q−1)wt (2.94)er identisk nul (for så vidt det er muligt). Det er helt evident, at referen emodellens tidsfor-sinkelse, κ, der er givet ved:
Bm(q−1) = q
−κB
m(q−1) limz→∞
Bm(z−1) 6= 0 (2.95)ifølge kausalitetskravet ikke kan være mindre end objektets. Der er i det følgende valgtsamme tidsforsinkelse for referen emodel og system, d.v.s. at κ = k. Det forudsættes at
Am-polynomiet er normeret således at:A
m(0) = 1 (2.96)I dimensioneringen vil vi ikke lægge os fast på en bestemt regulatorstruktur, men anvendeden generelle regulatorstruktur, hvor regulatoren er givet ved:R(q−1)ut = Q(q−1)wt − S(q−1)yt + ξ0 (2.97)

111BA
utwt
Q
−S
vtξ0
yt1R
Figur 2.8. Regulatorstruktur ved generel polpla eringeller som angivet i gur 2.8. For den lukkede sløjfe gælder der jvf. (2.91) at:(AR+ BS)yt = QBwt + ARv0 + Bξ0 (2.98)For at udkompensere den konstante belastning skal der for ξ0 gælde at:
ξ0 = −A(1)R(1)
B(1)v0 (2.99)Til den efterfølgende dimensionering har vi at:
Hy,w(q) =B(q−1)Q(q−1)
A(q−1)R(q−1) + B(q−1)S(q−1)= Gm(q) =
Bm(q−1)
Am(q−1)(2.100)Normalt er ordenen af AR+BS større end ordenen af Am, hvorfor tælleren BQ og nævneren
AR+ BS, på venstre side må have fælles faktorer. De resterende faktorer i BQ må følgeligkunne genndes i Bm. Den faktor, B+ , (af B-polynomiet) der ikke indgår i Bm må værefaktor i R. Antag at B-polynomiet er faktoriseret:B(q−1) = B
+(q−1)B−(q−1) (2.101)Her indeholder B− dels de objektnulpunkter som ønskes bibeholdt i den lukkede sløjfe ogdels de nulpunkter, der ikke kan udkompenseres, fordi de svarer til ustabile eller dårligtdæmpede nulpunkter. Leddet, q−k, der svarer til tidsforsinkelsen gennem systemet er altidfaktor i B−. Følgelig er det hensigtsmæssigt at anvende faktoriseringerne:R(q−1) = B
+(q−1)G(q−1) (2.102)og:B
m(q−1) = Bm1 (q−1)B−(q−1) (2.103)der denerer polynomierne Bm
l og G. Da faktoren Bml ikke er indeholdt i B gælder dernødvendigvis at:
Q(q−1) = Bm1 (q−1)Ao(q
−1) (2.104)altså at Bml må indføres som faktor i Q-polynomiet. Det kan ved hjælp af en tilstandsbe-skrivelse vises at regulatoren (2.97) svarer til en tilbagekobling fra en observers tilstande.Det kan endvidere vises at Ao-polynomiet svarer til observerens karakteristiske polynomi-um. Følgelig benævnes Ao-polynomiet som observerpolynomiet. Yderligere skal det valgte
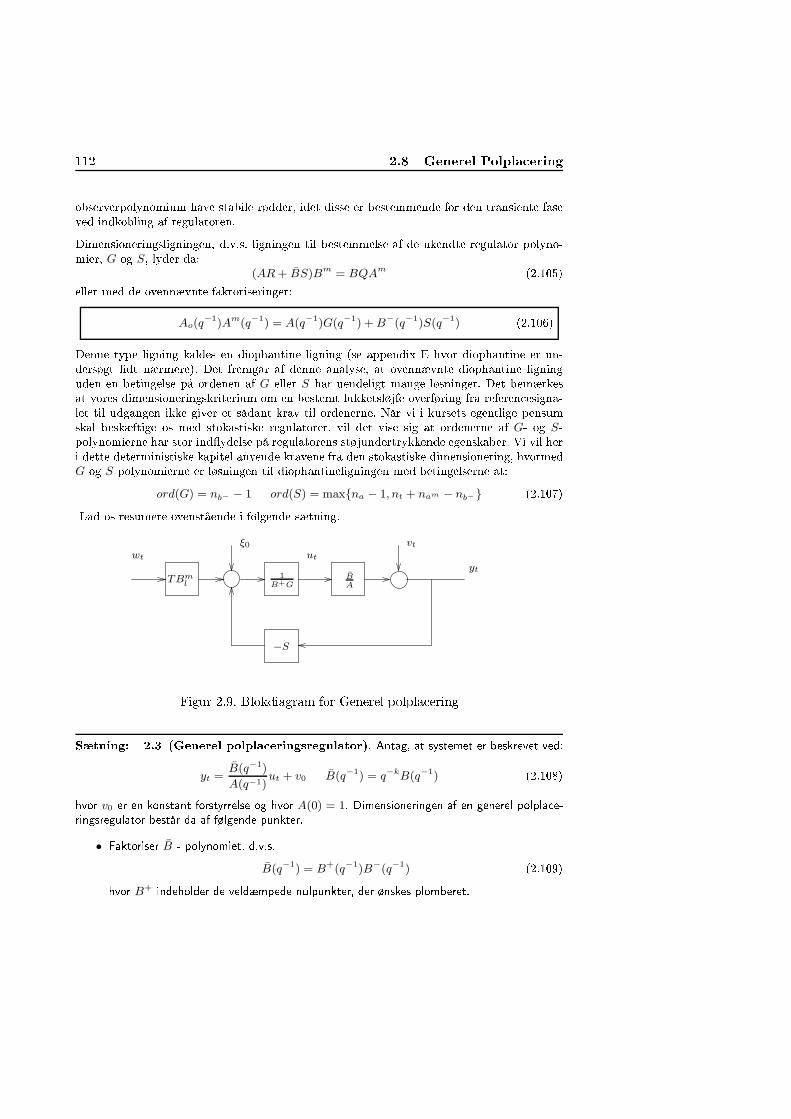
112 2.8 Generel Polpla eringobserverpolynomium have stabile rødder, idet disse er bestemmende for den transiente faseved indkobling af regulatoren.Dimensioneringsligningen, d.v.s. ligningen til bestemmelse af de ukendte regulator polyno-mier, G og S, lyder da:(AR+ BS)Bm = BQA
m (2.105)eller med de ovennævnte faktoriseringer:Ao(q
−1)Am(q−1) = A(q−1)G(q−1) +B−(q−1)S(q−1) (2.106)Denne type ligning kaldes en diophantine ligning (se appendix E hvor diophantine er un-dersøgt lidt nærmere). Det fremgår af denne analyse, at ovennævnte diophantine ligninguden en betingelse på ordenen af G eller S har uendeligt mange løsninger. Det bemærkesat vores dimensioneringskriterium om en bestemt lukketsløjfe overføring fra referen esigna-let til udgangen ikke giver et sådant krav til ordenerne. Når vi i kursets egentlige pensumskal beskæftige os med stokastiske regulatorer, vil det vise sig at ordenerne af G- og S-polynomierne har stor indydelse på regulatorens støjundertrykkende egenskaber. Vi vil heri dette deterministiske kapitel anvende kravene fra den stokastiske dimensionering, hvormed
G og S polynomierne er løsningen til diophantineligningen med betingelserne at:ord(G) = nb− − 1 ord(S) = maxna − 1, nt + nam − nb− (2.107)Lad os resumere ovenstående i følgende sætning.
TBml
utwt
−S
vtξ0
ytBA
1B+G
Figur 2.9. Blokdiagram for Generel polpla eringSætning: 2.3 (Generel polpla eringsregulator). Antag, at systemet er beskrevet ved:yt =
B(q−1)
A(q−1)ut + v0 B(q−1) = q
−kB(q−1) (2.108)hvor v0 er en konstant forstyrrelse og hvor A(0) = 1. Dimensioneringen af en generel polpla e-ringsregulator består da af følgende punkter.
• Faktoriser B - polynomiet, d.v.s.B(q−1) = B
+(q−1)B−(q−1) (2.109)hvor B+ indeholder de veldæmpede nulpunkter, der ønskes plomberet.
113• Vælg referen emodellen, d.v.s. spe i er polynomierne Am og Bm
l , hvor Bml indeholder denulpunkter i referen emodellen, der ikke er systemnulpunkter. Angiv desuden observerpoly-nomiet Ao(q
−1), der ligesom Am er stabilt og er normeret således at Am(0) = Ao(0) = 1.• Løs diophantine ligningen:
Ao(q−1)Am(q−1) = A(q−1)G(q−1) +B
−(q−1)S(q−1) (2.110)med hensyn til G(q−1) og S(q−1), når:ord(G) = nb− − 1 ord(S) = maxna − 1, nao + nam − nb− (2.111)
• Anvend regulatoren:B
+(q−1)G(q−1)ut = Ao(q−1)Bm
l (q−1)wt − S(q−1)yt + ξ0 (2.112)hvor:ξ0 = −A(1)G(1)
B−(1)v0 (2.113)
2Med den generelle polpla eringsregulator vil den lukkede sløjfe være beskrevet som angiveti følgende sætning.Sætning: 2.4 (Generel polpa erings regulator) I den lukkede sløjfe er udgangen forvilkårligt ξ0 givet ved:yt =
Bm
Amwt +
1
AmAo
˘
B−1ξ0 + AGv0
¯ (2.114)hvor :B
m = Bml B
− (2.115)Styresignalet er givet ved:ut =
Bml A
B+Amwt + u0 (2.116)hvor:
u0 =A
AoB+Am(ξ0 − Sv0) (2.117)
2Bemærk, at sidste led i udtrykket, (2.114), for udgangen er identisk nul for korrekt ξ0 (d.v.s.aftager asymptotisk mod nul efter indkobling af regulatoren, idet Ao-polynomiet har allerødder indenfor stabilitets området).Bevis: Lukketsløjfesystemet er dels beskrevet af systemlignigen:Ayt = But + Av0 (2.118)og af styreloven:
B+Gut = AoB
ml wt − Syt + ξ0 (2.119)
114 2.8 Generel Polpla eringVed at multipli ere systemligning med G og styrelov med B− nder vi at:AGyt = BGut +AGv0 (2.120)og
BGut = AoBmwt − SB
−yt +B
−ξ0 (2.121)eller at:
AGyt = AoBmwt − SB
−yt +B
−ξ0 + AGv0 (2.122)Anvender vi diophantineligningen:
AoAm = AG+B
−S (2.123)får vi at:
AoAmyt = AoB
mwt +B
−ξ0 + AGv0 (2.124)eller:
yt =Bm
Amwt +
1
AmAo
˘
B−1ξ0 + AGv0
¯ (2.125)På tilsvarende måde nder vi at:SAyt = SBut + SAv0 (2.126)og
AB+Gut = AAoB
ml wt − ASyt + aξ0 (2.127)Hermed nder vi at:
AB+Gut = AAoB
ml wt − (SBu+ SAv0) +Aξ0 (2.128)eller at:
B+AoA
mut = AoAB
ml wt +Aξ0 − SAv0 (2.129)Dermed er:
ut =Bm
l A
B+Amwt + u0 (2.130)hvor:
u0 =A
AoB+Am(ξ0 − Sv0) (2.131)
2I det helt generelle tilfælde skal der foretages en faktorisering af systemets B-polynomiumi en faktor B+, der indeholder de systemnulpunkter, der kan plomberes. Som det er nævntved tidligere lejligheder er det en nødvendighed at disse nulpunkter er veldæmpede, d.v.s.at de er beliggende klart indenfor enheds irklen. Hvis alle systemets nulpunkter er veldæm-pede er det muligt at plombere samtlige nulpunkter. Man betegner dette for PZ-regulering(PZ for pole-zero). I den anden ende af spektret kan man vælge ikke at plombere nogennulpunkter overhovedet, d.v.s. at udføre en ren polpla ering (eller intrinsik polpla ering). Iforbindelse med adaptiv regulering er det af numeriske (og regnetidsmæssige) årsager ikkealtid hensigtsmæssigt at skulle udføre en faktorisering af B polynomiet. Vi vil derfor i detfølgende betragte to spe ialtilfælde af den generelle polpla eringsregulator.
1152.9 PZ-reguleringUnder forudsætning af at alle systemets nulpunkter er beliggende indenfor enheds irklen ogat de er veldæmpede, er det muligt at plombere samtlige systemnulpunkter. I dette tilfældeer:B
− = q−k
B+ = B (2.132)De øvrige faktoriseringer af de generelle regulatorpolynomier bliver:
Bm = q
−kB
ml (2.133)og
R = BG (2.134)hvorved designpro eduren udarter til:Sætning: 2.5 (PZ-regulator). Antag, at systemet er beskrevet ved:yt = q
−kB
Aut + v0 (2.135)hvor v0 er en konstant forstyrrelse og hvor A(0) = 1. Dimensioneringen af en polpla eringsregu-lator der plomberer alle systemets nulpunkter, PZ-regulator, består da af følgende punkter.
• Vælg referen e modellen, d.v.s. spe i er polynomierneAm og Bml , hvor Bm
l indeholder denulpunkter i referen emodellen, der ønskes introdu eret i overføringen fra referen esignaltil udgang. Angiv desuden observerpolynomiet , Ao, der ligesom Am er stabilt og ernormeret således at Ao(0) = Am(0) = 1.• Løs diophantine ligningen:
AoAm = AG+ q
−kS (2.136)med hensyn til G og S, når:
ord(G) = k − 1 ord(S) = maxna − 1, nt + nam − k (2.137)• Anvend regulatoren:
BGut = AoBml wt − Syt + ξ0 (2.138)hvor:
ξ0 = −A(1)G(1)v0 (2.139)2Som spe ialtilfælde af sætning 2.4 har viSætning: 2.6 (PZ-regulator): I den lukkede sløjfe er udgangen givet ved:
yt = q−kB
m
Amwt +
1
AmAo
ξ0 + A(1)G(1)v0 (2.140)
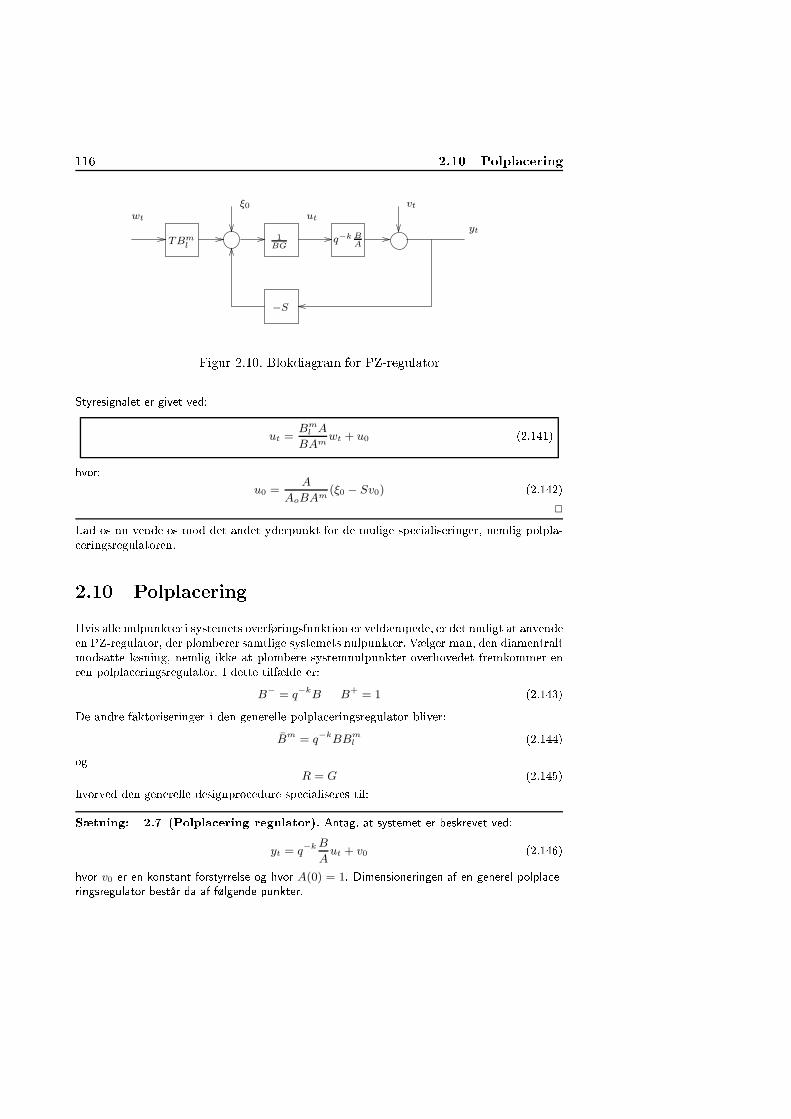
116 2.10 Polpla eringTBm
l
utwt
vtξ0
yt1
BGq−k B
A
−SFigur 2.10. Blokdiagram for PZ-regulatorStyresignalet er givet ved:ut =
Bml A
BAmwt + u0 (2.141)hvor:
u0 =A
AoBAm(ξ0 − Sv0) (2.142)
2Lad os nu vende os mod det andet yderpunkt for de mulige spe ialiseringer, nemlig polpla- eringsregulatoren.2.10 Polpla eringHvis alle nulpunkter i systemets overføringsfunktion er veldæmpede, er det muligt at anvendeen PZ-regulator, der plomberer samtlige systemets nulpunkter. Vælger man, den diamentraltmodsatte løsning, nemlig ikke at plombere systemnulpunkter overhovedet fremkommer enren polpla eringsregulator. I dette tilfælde er:B
− = q−kB B
+ = 1 (2.143)De andre faktoriseringer i den generelle polpla eringsregulator bliver:B
m = q−kBB
ml (2.144)og
R = G (2.145)hvorved den generelle designpro edure spe ialiseres til:Sætning: 2.7 (Polpla ering regulator). Antag, at systemet er beskrevet ved:yt = q
−kB
Aut + v0 (2.146)hvor v0 er en konstant forstyrrelse og hvor A(0) = 1. Dimensioneringen af en generel polpla e-ringsregulator består da af følgende punkter.
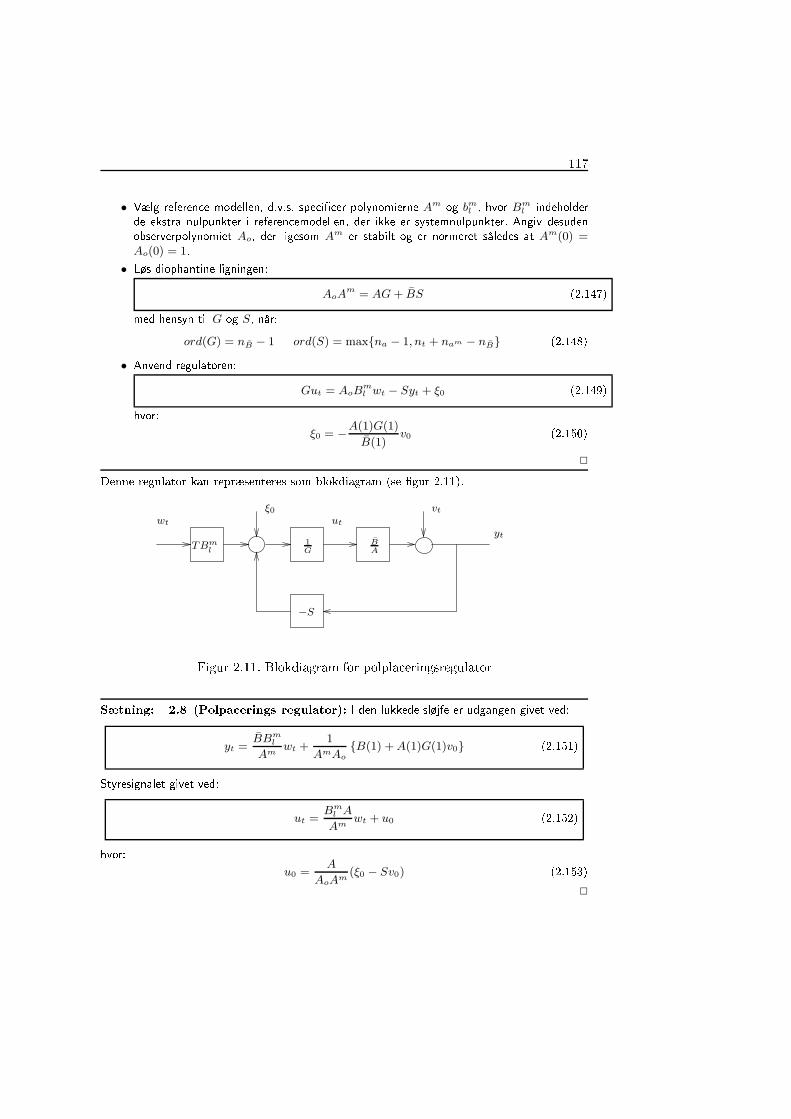
117• Vælg referen e modellen, d.v.s. spe i er polynomierne Am og bml , hvor Bm
l indeholderde ekstra nulpunkter i referen emodellen, der ikke er systemnulpunkter. Angiv desudenobserverpolynomiet Ao, der ligesom Am er stabilt og er normeret således at Am(0) =Ao(0) = 1.
• Løs diophantine ligningen:AoA
m = AG+ BS (2.147)med hensyn til G og S, når:ord(G) = nB − 1 ord(S) = maxna − 1, nt + nam − nB (2.148)
• Anvend regulatoren:Gut = AoB
ml wt − Syt + ξ0 (2.149)hvor:
ξ0 = −A(1)G(1)
B(1)v0 (2.150)
2Denne regulator kan repræsenteres som blokdiagram (se gur 2.11).TBm
l
utwt
−S
vtξ0
ytBA
1G
Figur 2.11. Blokdiagram for polpla eringsregulatorSætning: 2.8 (Polpa erings regulator): I den lukkede sløjfe er udgangen givet ved:yt =
BBml
Amwt +
1
AmAo
B(1) +A(1)G(1)v0 (2.151)Styresignalet givet ved:ut =
Bml A
Amwt + u0 (2.152)hvor:
u0 =A
AoAm(ξ0 − Sv0) (2.153)
2
118 2.10 Polpla eringooo0ooo

Kapitel 3Statistisk Basis.Nærværende kapitel er ikke ment som en fyldestgørende indføring i statistik. Kapitlet er kunment som et referen e kapitel med en en kort beskrivelse af det statistiske grundlag som deefterfølgende kapitler hviler på. Hvad en egentlig indlæring af statistik angår henvises der tilde indledende statistiske fag (se f.eks. (Conradsen 1979a) og (Conradsen 1979b). Se i øvrigt(Davis & Vinter 1985) eller (Caines 1988). Fremstillingen i dette kapitel er tilrettelagt medhenblik på den anvendelse, som den danner grundlag for.3.1 Stokastiske Skalære VariableVi vil indledningsvis betragte skalære stokastiske variable. En stokastisk variabel, X, er etnumerisk udfald af et eksperiment, hvis resultat ikke i forvejen præ ist kan forudsiges. Mate-matisk kan egenskaberne for en stokastisk variabel, X, spe i eres ved en fordelingsfunktion,FX , som er deneret som sandsynligheden for at X i et enkelt forsøg falder i et givet intervalpå den reelle akse:
FX(x) = P
n
X ≤ xo (3.1)For arbitrære konstanter a og b gælder:
P
n
a < X ≤ bo
= FX(b) − FX(a) (3.2)Følgelig er FX en ikke aftagende funktion. Spe ielt gælder der:lim
x→−∞FX(x) = 0 lim
x→∞FX(x) = 1 (3.3)
FX er kontinuert fra højre, og FX(a+) − FX(a−) er sandsynligheden for, at X præ istantager værdien a. I forbindelse med fordelinger arbejdes der ofte med fraktiler. For en119

120 3.1 Stokastiske Skalære Variablestokastisk variabel X med en kontinuert og strengt monotont voksende fordelingsfunktioner p-fraktilen, fp, deneret ved:F (fp) = p (3.4)altså det tal i udfaldsrummet hvor P
n
X ≤ fp
o
= p. Generelt er en fraktil fp deneret vedat:F (f−
p ) ≤ p ≤ F (f+p ) (3.5)Se i øvrigt (Conradsen 1979a). Den vigtige 50%-fraktil betegnes som medianen. Tætheds-funktionen fX (x) er formelt deneret ved:
FX(x) =
Z x
−∞fX(α)dα (3.6)hvorved (under passende forudsætninger)
fX(x) =d
dxFX(x) (3.7)En tæthedsfunktion opfylder kravene:
fX(x) ≥ 0
Z ∞
−∞fX (x)dx = 1 (3.8)Eksempel: 3.1 (uniform fordeling:) En stokastisk variabel, X, siges at være rektangulær(eller uniform) fordelt X ∈ U(a, b), hvis den har tæthedsfunktionen:
f(x) =
1b−a
a < x < b
0 ellers (3.9)Fordelingsfunktionen er lineært voksende i intervallet.F (x) =
8
<
:
0 x ≤ a1
b−a(x − a) a < x < b
1 b ≤ x
(3.10)Tætheds- og fordelingsfunktion er skitseret i gur 3.1. Denne tilsyneladende simple fordelingstypehar ere praktiske anvendelser. I forbindelse med simulation danner den grundlag for generering afudfald af stokastiske variable med en given fordeling. Udfald fra en given fordeling genereres ved attransformere et (eller ere) udfald fra en simuleret generering af udfald fra en uniform fordeling.Se i øvrigt (Iversen 1990). Kvantiseringsstøjen i en A/D-konverter kan modelleres som en additivstøjkilde, (se 3.2) der er U(0, l2n ), hvor l er A/D-konverterens operationsområde og n er antalletaf bit i den digitale repræsentation. Se i øvrigt (Levin 1982). 2Hvis X er kontinuert er frekvensfunktionen deneret som tæthedsfunktionen. Hvis X erdiskret (dvs. X kun antager diskrete værdier xi) vil fordelingsfunktionen vokse i spring ogtæthedsfunktionen være vægtet sum af Dira funktioner. I dette tilfælde er frekvensfunktio-nen f deneret ved:f(xi) = P
n
X = xi
o
i = 1, ... (3.11)Denne er i det diskrete tilfælde relateret til fordelingsfunktionen ved:FX(x) =
X
f(xi) (3.12)

121
2 4 6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1frekvensfunktion
x
f
2 4 6-0.5
0
0.5
1
1.5Fordelingsfunktion
x
F
Figur 3.1. Frekvens- og fordelingsfunktion for en Rektangulær U(3, 5)−fordelt stoka-stisk variabelyt
et
yt1y(tc)A Dy(tc)Figur 3.2. Kvantiseringsstøjen i en A/D-konverter kan modelleres som additiv uni-formfordelt støjEksempel: 3.2 (Binær stokastisk variabel) Betragt en stokastisk variabel, X, der kun an-tager værdierne ±1, hver med sandsynligheden 0.5. Fordelingsfunktionen er:FX(x) = P
n
X ≤ xo
=
8
<
:
0 for x < −10.5 for −1 ≤ x < 11 for 1 ≤ x
(3.13)og tæthedsfunktionen:fX(x) =
1
2(δ(x + 1) + δ(x − 1)) (3.14)Hvor δ(x) er Dira 's deltafunktion. 2

122 3.2 Momenter og Forventning3.2 Momenter og ForventningLad g være en reel funktion og X en stokastisk variabel. Da vil g(X) også være en stokastiskvariabel, hvis forventningsværdi er (hvis den eksisterer) givet ved:E
n
g(X)o
=
Z ∞
−∞g(x)fX(x)dx (3.15)Det kan vises, at forventningen eksisterer hvis integralet
Z ∞
−∞|g(x)|fX(x)dx (3.16)er konvergent.Middelværdien eller forventningsværdien af X er deneret ved
mx = E
n
Xo
=
Z ∞
−∞xfX(x)dx (3.17)og udtrykker den gennemsnitlige værdi af X ved en lang række forsøg. Et mål for variationenomkring denne middelværdi er givet ved variansen, der er deneret ved
Vx = Varn
Xo
= E
n
(X −mx)2o
=
Z ∞
−∞(x−mx)2fX(x)dx (3.18)Bemærk analogien mellem varians og inertimoment. Spredningen eller standardafvigelsenfor X er:
σx =√Vx (3.19)der har samme dimension som den stokastiske variabel. Nogle egenskaber for varians eropsummeret i følgende sætning, der angives uden bevis.Sætning: 3.1 Antag at X2 er integrabel, dvs. E
n
X2o
<∞, da er:• Vx veldeneret samt er givet ved:
Varn
Xo
= E
n
X2o
− (En
Xo
)2 (3.20)Vi siger derfor, at X har endelig varians hvis E
n
X2o
<∞.• For enhver positiv konstant, a, gælder Cheby hevs ulighed:
P
n
|X| > ao
≤ 1
a2E
n
X2o (3.21)
• Funktionen:v(b) = E
n
(X − b)2o (3.22)har minimum for:
b = E
n
Xo (3.23)og minimum antager værdien Vx.

123• E
n
X2o
= 0 hvis og kun hvis P
n
X = 0o
= 1
2Hvis de første momenter, middelværdi, µ, og varians, σ2, eksisterer for en stokastisk variabel,X, skriver vi:
X ∈ F`
µ, σ2´ (3.24)i analogi med notationen for den normale fordeling.Eksempel: 3.3 Betragt den rektangulære fordeling fra eksempel 3.1. Antag, at X ∈ U(a, b). Dagælder at:
X ∈ F
„
a + b
2,
1
12(b − a)2
« (3.25)Hvis Y ∈ U(0, 1) er:X = a + (b − a)Y ∈ U(a, b) (3.26)under forudsætning af at a og b er skalare konstanter. 2Eksempel: 3.4 (Bernoullifordelingen) Betragt en stokastisk variabel, X, der kun antager 2værdier: 0 og 1. Lad sandsynligheden for at X antager værdien 1 er p (p ≤ 1). Vi betegner X somværende Bernoullifordelt og skriver at X ∈ B(1, p). Tæthedsfunktionen er da:
f(x) = (1 − p)δ(x) + pδ(x − 1) (3.27)og frekvensfunktionen er lig:f(x) = px(1 − p)1−x x = 0, 1 (3.28)I dette tilfælde er:
X ∈ F (p, p(1 − p)) (3.29)Betragt nu n 2Eksempel: 3.5 (Binominialfordelingen) Lad nu en stokastisk variabel Y være summen af nuafhængige (0, 1) Bernoullifordelte stokastiske variable, Xi, i = 1, ..., n. Den stokastiske variable,Y , kan være fremkommet som antallet af su es (dvs. udfaldet 1) ved n Bernoulli forsøg, hvorsandsynligheden for su es er p. Vi skriver at: Y ∈ B(n, p) og frekvensfunktionen for Y er:
f(y) =
„
ny
«
py(1 − p)n−y y = 1, ..., n (3.30)For en binominialfordelt stokastisk variabel fælder at:Y ∈ F (np,np(1 − p)) (3.31)
2Eksempel: 3.6 (LaPla e-fordelingen) En stokastisk variabel, X siges at være LaPla e fordelt,dvs. La(α, β), hvis tæthedsfunktionen for X er:f(x) =
1
2βexp
− 1
β|x − a|
ff (3.32)For en La(α, β) fordelt stokastisk variabel gælder at:X ∈ F
`
α, 2β2´ (3.33)Det bemærkes at LaPla e-fordelingen aftager langsommere end den normale for |x| → ∞. 2

124 3.2 Momenter og ForventningDet n'te ordens moment af X er (under forudsætning af at det eksisterer) deneret vedE
n
Xno
=
Z ∞
−∞x
nfX(x)dx (3.34)mens
E
n
(X −mx)no
=
Z ∞
−∞(x−mx)n
fX(x)dx (3.35)betegner det n'te ordens entrale moment.Forventningsværdi dannelsen er lineær. Antag at a og b er konstante størrelser. Da er:E
n
ag1(X) + bg2(X)o
= aEn
g1(X)o
+ bEn
g2(X)o (3.36)En stokastisk variabel kan også beskrives ved dens karakteristiske funktion, der er deneretved:
ϕx(ω) = E
n
ejωX
o (3.37)Betydningen af denne funktion er bl. a. begrundet med, at en stokastisk variabels momenterkan opnås ved at dierentiere den karakteristiske funktion. Det kan vises, at:E
n
Xno
=1
jn
dn
dωnϕx(ω)|ω=0 (3.38)for alle n forudsat at ϕx er analytisk. Det kan vises at den karakteristiske funktion altideksisterer (idet ejωX er begrænset). Af denitionen kan vi se, at den karakteristiske funktionblot fremkommer ved at Fouriertransformere tæthedsfunktionen:
ϕx(ω) =
Z ∞
−∞e
jωxfX(x)dx (3.39)(I appendix A er de basale egenskaber ved fouriertransformationen angivet). Følgelig giverden inverse Fouriertransformation tæthedsfunktionen
fX(x) =1
2π
Z ∞
−∞e−jωx
ϕx(ω)dω (3.40)3.2.1 Den skalære normalfordelingVi vil i dette afsnit give denitionen og nogle basale egenskaber for en normalfordelt sto-kastisk skalar. Vi vil i et senere afsnit kon entrerer fremstillingen omkring normalfordeltestokastiske vektorer.Denition: 3.1 En stokastisk skalar variabel, X, siges at være normalfordelt, d.v.s. atX ∈ N(µ, σ2) (3.41)hvis den har tætheden:
fX(x) =1
σϕN (
x− µ
σ) (3.42)hvor
ϕN(x) =1√2πe− 1
2x2 (3.43)
2
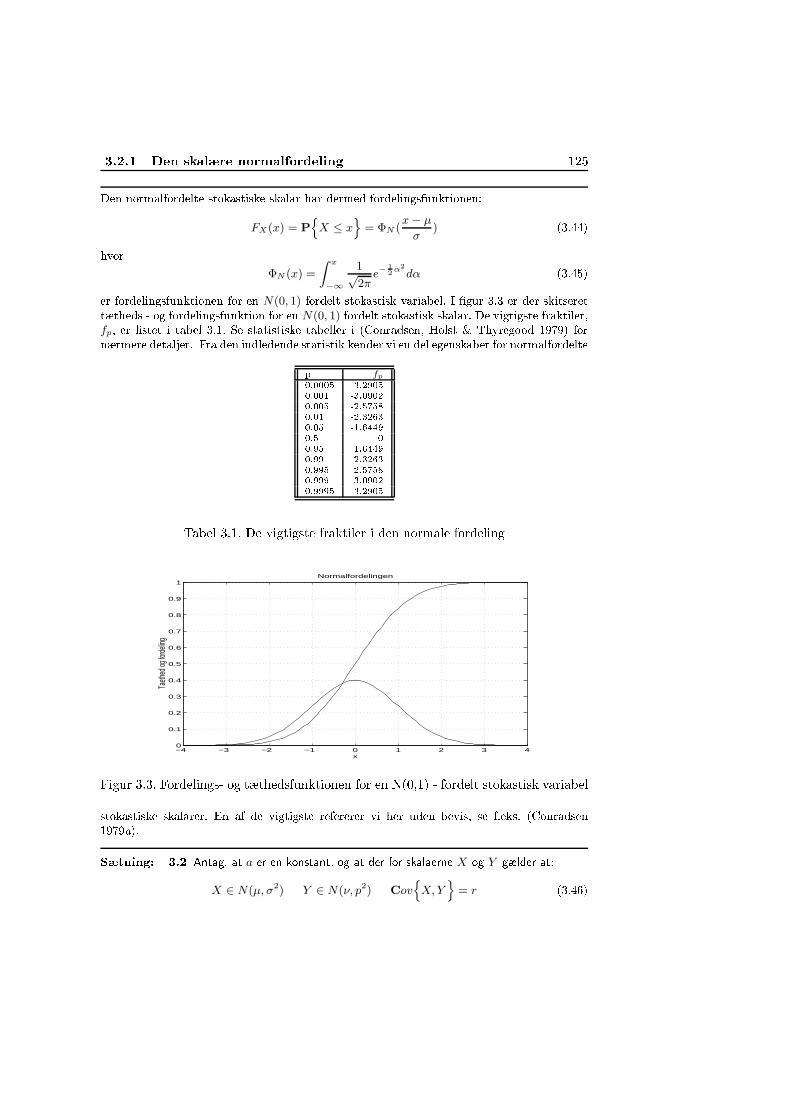
3.2.1 Den skalære normalfordeling 125Den normalfordelte stokastiske skalar har dermed fordelingsfunktionen:FX(x) = P
n
X ≤ xo
= ΦN (x− µ
σ) (3.44)hvor
ΦN (x) =
Z x
−∞
1√2πe− 1
2α2
dα (3.45)er fordelingsfunktionen for en N(0, 1) fordelt stokastisk variabel. I gur 3.3 er der skitserettætheds - og fordelingsfunktion for en N(0, 1) fordelt stokastisk skalar. De vigtigste fraktiler,fp, er listet i tabel 3.1. Se statistiske tabeller i (Conradsen, Holst & Thyregood 1979) fornærmere detaljer. Fra den indledende statistik kender vi en del egenskaber for normalfordeltep fp0.0005 -3.29050.001 -3.09020.005 -2.57580.01 -2.32630.05 -1.64490.5 00.95 1.64490.99 2.32630.995 2.57580.999 3.09020.9995 3.2905Tabel 3.1. De vigtigste fraktiler i den normale fordeling
−4 −3 −2 −1 0 1 2 3 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Normalfordelingen
Taeth
ed og
forde
ling
xFigur 3.3. Fordelings- og tæthedsfunktionen for en N(0,1) - fordelt stokastisk variabelstokastiske skalarer. En af de vigtigste refererer vi her uden bevis, se f.eks. (Conradsen1979a).Sætning: 3.2 Antag, at a er en konstant, og at der for skalaerne X og Y gælder at:X ∈ N(µ, σ2) Y ∈ N(ν, p2) Cov
n
X,Yo
= r (3.46)
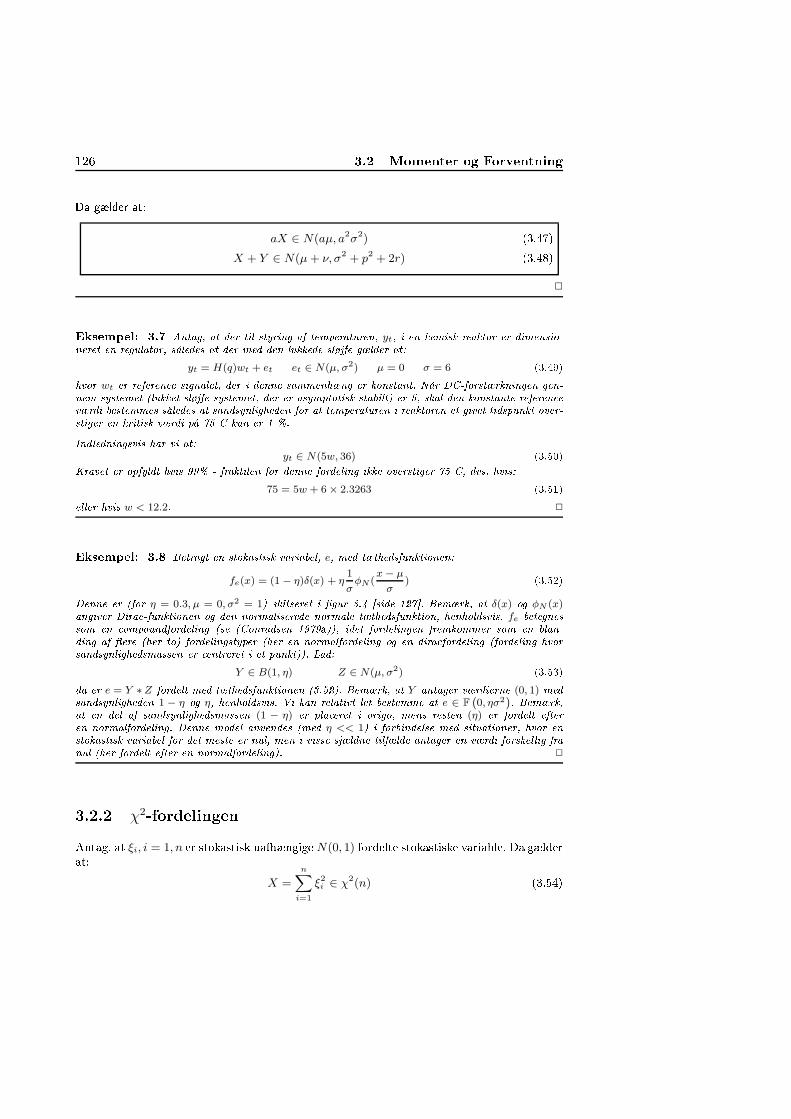
126 3.2 Momenter og ForventningDa gælder at:aX ∈ N(aµ, a2
σ2) (3.47)
X + Y ∈ N(µ+ ν, σ2 + p
2 + 2r) (3.48)2Eksempel: 3.7 Antag, at der til styring af temperaturen, yt, i en kemisk reaktor er dimensio-neret en regulator, således at der med den lukkede sløjfe gælder at:
yt = H(q)wt + et et ∈ N(µ, σ2) µ = 0 σ = 6 (3.49)hvor wt er referen e signalet, der i denne sammenhæng er konstant. Når DC-forstærkningen gen-nem systemet (lukket sløjfe systemet, der er asymptotisk stabilt) er 5, skal den konstante referen eværdi bestemmes således at sandsynligheden for at temperaturen i reaktoren et givet tidspunkt over-stiger en kritisk værdi på 75 C kun er 1 %.Indledningsvis har vi at:yt ∈ N(5w, 36) (3.50)Kravet er opfyldt hvis 99% - fraktilen for denne fordeling ikke overstiger 75 C, dvs. hvis:
75 = 5w + 6 × 2.3263 (3.51)eller hvis w < 12.2. 2Eksempel: 3.8 Betragt en stokastisk variabel, e, med tæthedsfunktionen:fe(x) = (1 − η)δ(x) + η
1
σφN (
x − µ
σ) (3.52)Denne er (for η = 0.3, µ = 0, σ2 = 1) skitseret i gur 3.4 [side 127. Bemærk, at δ(x) og φN (x)angiver Dira -funktionen og den normaliserede normale tæthedsfunktion, henholdsvis. fe betegnessom en ompoundfordeling (se (Conradsen 1979a)), idet fordelingen fremkommer som en blan-ding af ere (her to) fordelingstyper (her en normalfordeling og en dira fordeling (fordeling hvorsandsynlighedsmassen er entreret i et punkt)). Lad:
Y ∈ B(1, η) Z ∈ N(µ, σ2) (3.53)da er e = Y ∗Z fordelt med tæthedsfunktionen (3.52). Bemærk, at Y antager værdierne (0, 1) medsandsynligheden 1 − η og η, henholdsvis. Vi kan relativt let bestemme at e ∈ F`
0, ησ2´. Bemærk,at en del af sandsynlighedsmassen (1 − η) er pla eret i origo, mens resten (η) er fordelt efteren normalfordeling. Denne model anvendes (med η << 1) i forbindelse med situationer, hvor enstokastisk variabel for det meste er nul, men i visse sjældne tilfælde antager en værdi forskellig franul (her fordelt efter en normalfordeling). 23.2.2 χ2-fordelingenAntag, at ξi, i = 1, n er stokastisk uafhængige N(0, 1) fordelte stokastiske variable. Da gælderat:
X =
nX
i=1
ξ2i ∈ χ
2(n) (3.54)
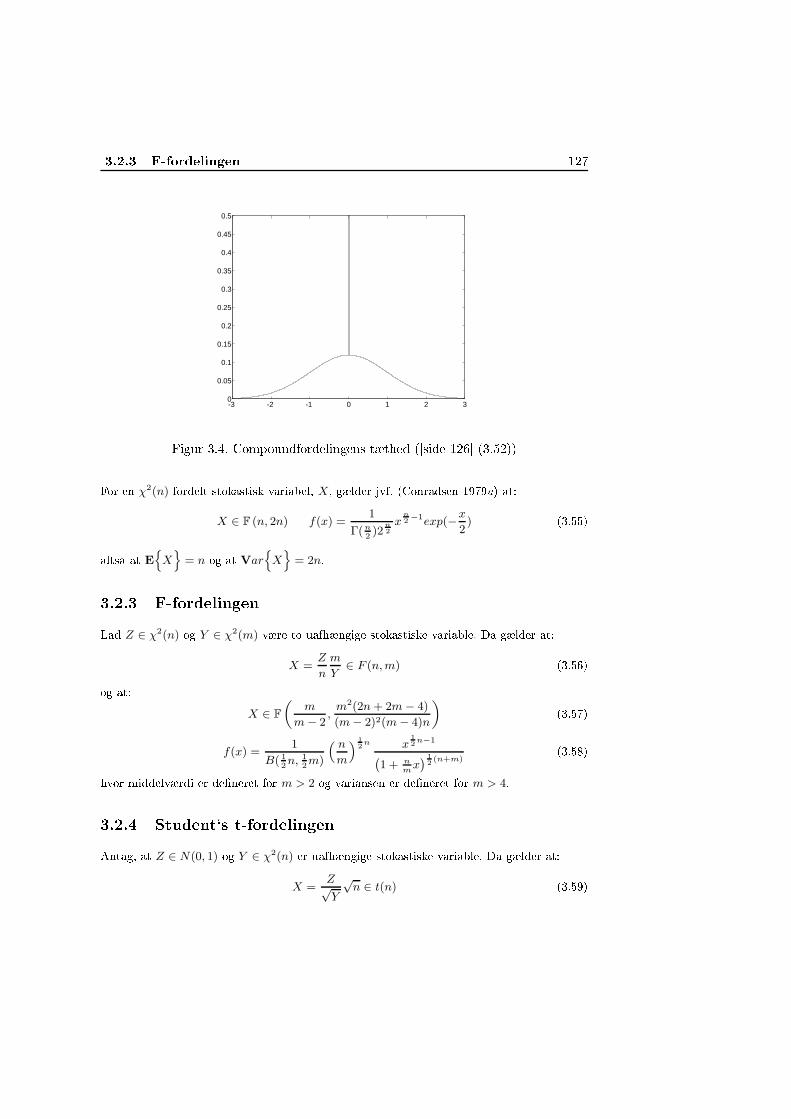
3.2.3 F-fordelingen 127
-3 -2 -1 0 1 2 30
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Figur 3.4. Compoundfordelingens tæthed ([side 126 (3.52))For en χ2(n) fordelt stokastisk variabel, X, gælder jvf. (Conradsen 1979a) at:X ∈ F (n, 2n) f(x) =
1
Γ(n2)2
n2
xn2−1exp(−x
2) (3.55)altså at E
n
Xo
= n og at Varn
Xo
= 2n.3.2.3 F-fordelingenLad Z ∈ χ2(n) og Y ∈ χ2(m) være to uafhængige stokastiske variable. Da gælder at:X =
Z
n
m
Y∈ F (n,m) (3.56)og at:
X ∈ F
„
m
m− 2,m2(2n+ 2m− 4)
(m− 2)2(m− 4)n
« (3.57)f(x) =
1
B( 12n, 1
2m)
“
n
m
” 12
n x12
n−1
`
1 + nmx´ 1
2(n+m)
(3.58)hvor middelværdi er deneret for m > 2 og variansen er deneret for m > 4.3.2.4 Student`s t-fordelingenAntag, at Z ∈ N(0, 1) og Y ∈ χ2(n) er uafhængige stokastiske variable. Da gælder at:X =
Z√Y
√n ∈ t(n) (3.59)

128 3.3 Afhængighed mellem Stokastiske Skalære Variableog hvor:X ∈ F
„
0,n
n− 2
«
f(x) =Γ( 1
2(n+ 1))√nπΓ(n
2)
„
x2
n+ 1
«− n+12 (3.60)Her er middelværdi og variansen deneret for n > 1 og n > 2, henholdsvis. For n → ∞ gårt-fordelingen mod den normale (dvs. N(0, 1)). Desuden gælder at X2 ∈ F (1, n).3.3 Afhængighed mellem Stokastiske Skalære Vari-ableInden vi vil behandle stokastiske vektorer, vil vi beskæftige os med afhængighed mellemstokastiske skalære variable.Lad A og B være to hændelser. Den betingede sandsynlighed for hændelsen A, givet athændelsen B er indtruet, deneres da ved:
P
n
A|Bo
=P
n
A,Bo
P
n
Bo (3.61)forudsat P
n
Bo
6= 0. Den betingede sandsynlighed er altså sandsynligheden for at A ind-træer, når hændelsen B er indtruet.Antag, at vi har to stokastiske variable X og Y med hver deres respektive marginale forde-lingsfunktioner:FX(x) = P
n
X ≤ xo
og FY (y) = P
n
Y ≤ yo (3.62)samt tæthedsfunktioner, fX (x) og fY (y). Den simultane fordelingsfunktion er deneret ved:
FX,Y (x, y) = P
n
X ≤ x, Y ≤ yo (3.63)Den simultane tæthedsfunktion er (under forudsætning af eksistens) givet ved:
fX,Y (x, y) =d2
dxdyFX,Y (x, y) (3.64)idet den (formelt) er deneret ved relationen:
FX,Y (x, y) =
Z x
−∞
Z y
−∞fX,Y (α, β)dβdα (3.65)I forbindelse med betingede fordelinger kan vi passende betragte to spe ielle hændelser,nemlig:
A1 : X ≤ x og B1 : Y ≤ y (3.66)hvorved (jvf. 3.61):P
n
X ≤ x|Y ≤ yo
=P
n
X ≤ x, Y ≤ yo
P
n
Y ≤ yo =
FX,Y (x, y)
FY (y)(3.67)

129I vore anvendelser er det mere interessant at kende den betingede fordelingsfunktion,PnX≤x|Y =
yo, d.v.s. at kende fordelingen af X, når hændelsen Y = y er indtruet (dvs. når vi kenderudfaldet af Y ). De stokastiske variable vi kommer til at beskæftige os med har et kontinuertudfaldsrum. Imidlertid er sandsynligheden for at Y = y lig nul for en stokastisk variabelmed kontinuert fordeling, hvilket betyder, at det ikke umiddelbart er muligt at indsætte idenitions ligningen for betinget sandsynlighed. Vi må i stedet anvende en lidt anden frem-gangsmåde. Sandsynligheden for hændelsen A2 : X ≤ x givet hændelsen B2 : y < Y ≤ y+ δer indtruet, ses (jvf. 3.61) at være:
P
n
X ≤ x|y < Y ≤ y + δo
=P
n
X ≤ x, y < Y ≤ y + δo
P
n
y < Y ≤ y + δo
=FX,Y (x, y + δ) − FX,Y (x, y)
FY (y + δ) − FY (y)Ovennævnte vanskelighed kan nu omgås ved følgende denition:FX|Y (x|y) = P
n
X ≤ x|Y = yo
= limδ→0
FX,Y (x, y + δ) − FX,Y (x, y)
FY (y + δ) − FY (y)(3.68)Man kan vise at ovenstående denition er ensbetydende med at:
FX|Y (x|y) =
R x
−∞ fX,Y (α, β)dαdβR∞−∞ fX,Y (α, y)dα
(3.69)Deneres den betingede tæthedsfunktion ud fra:FX|Y (x|y) =
Z x
−∞fX|Y (α, y)dα (3.70)eller (hvis dierentialet eksisterer):
fX|Y (x|y) =d
dxFX|Y (x|y) (3.71)gælder der, at
fX|Y (x|y) =fX,Y (x, y)
fY (y)(3.72)Denne funktion er naturligvis, ligesom den betingede fordelingsfunktion, både en funktionaf den løbende variabel, x, og af betingelses variablen, y. Til bestemmelse af den simultanetæthedsfunktion kan angives det omvendte udtryk:
fX,Y (x, y) = fX|Y (x|y)fY (y) (3.73)og endelig at:fX(x) =
Z ∞
−∞fX|Y (x|y)fY (y)dy (3.74)

130 3.3 Afhængighed mellem Stokastiske Skalære VariableAntag, at X betinget Y har endelig varians. Da gælder generelt at:E
n
g(X)|Yo
=
Z ∞
−∞g(x)fX|Y (x|y)dx (3.75)og spe ielt for den betingede middelværdi at:
mx|y = E
n
X|Yo
=
Z ∞
−∞xfX|Y (x|y)dx (3.76)Den betingede varians er givet ved:
Varn
X|Yo
= E
n
(X −mx|y)2|Yo
=
Z ∞
−∞(x−mx|y)
2fX|Y (x|y)dx (3.77)Bemærk, at disse værdier alle er funktioner af y.To stokastiske variable siges at være uafhængige hvis (og kun hvis):
FX,Y (x, y) = FX(x)FY (y) (3.78)Hvis tæthedsfunktionerne eksisterer er kravet ensbetydende med, at:fX,Y (x, y) = fX(x)fY (y) (3.79)næsten overalt.Hvis g(x, y) er en skalar funktion, da er g(X,Y ) en skalar stokastisk variabel hvis forvent-ningsværdi er deneret som:
E
n
g(X,Y )o
=
Z ∞
−∞
Z ∞
−∞g(x, y)fX,Y (x, y)dxdy (3.80)Det følger direkte af ovenstående denitionen at hvis X og Y er uafhængige og hvis
g(x, y) = g1(x)g2(y) (3.81)da er:E
n
g(X,Y )o
=
Z ∞
−∞
Z ∞
−∞g(x, y)fX,Y (x, y)dxdy
=
Z ∞
−∞
Z ∞
−∞g1(x)g2(y)fX(x)fY (y)dxdy
=
Z ∞
−∞g1(x)fX(x)dx
Z ∞
−∞g2(y)fY (y)dy
= E
n
g1(X)Eg2(Y )ounder forudsætning af at de indgående størrelser er veldenerede.Lad X og Y være stokastiske variable med endelig varians. Da er kovariansen mellem X og
Y veldeneret og givet ved:Cov
n
X,Yo
= E
n
(X −mx)(Y −my)o (3.82)

131Kovariansen er et mål for samvariationen mellem de to stokastiske variable. HvisCovnX,Y o =
0 siges X og Y at være ukorrelerede. Kovariansfunktionen er symmetrisk, d.v.s.:Cov
n
X,Yo
= Covn
Y,Xo (3.83)Bemærk, at kovariansen fremkommer ved (i 3.81) at sætte:
g1(X) = X −mx og g2(Y ) = Y −my (3.84)i udtrykket for E
n
g1(X)g2(Y )o. Det følger heraf, at hvis X og Y er uafhængige, da er deogså ukorrelede. Det omvendte er derimod ikke i al almindelighed tilfældet.For to stokastiske skalære variable X og Y kan S hwarz's ulighed:|Cov
n
X, Yo
| ≤p
VxVy = σxσy (3.85)vises. Vi denerer korrelations koe ienten, ρ, som:ρ =
Covn
X,Yo
σxσy
(3.86)hvor σ2x = Vx. Det kan let ud fra S hwartz ulighed vises at |ρ| ≤ 1. Korrelations koe ientener således et normeret mål for samvariationen.Der gælder, at |ρ| = 1, hvis og kun hvis der eksisterer to konstanter c1 og c2 således at:
Y = c1X + c2 (3.87)D.v.s. at der er en deterministisk relation mellemX og Y . Videre gælder at E
n
(X−Y )2o
= 0hvis og kun hvis P
n
X = Yo
= 1. I så fald siger vi, at X = Y næsten sikkert.3.4 Stokastiske VektorerEn anden type af stokastiske variable er stokastiske vektorer. En stokastisk vektorX = (X1,X2, ..., Xn)⊤ (3.88)er en samling (i en vektor) af n stokastiske skalære variableX1,X2, ...Xn. For at karakterisereen stokastisk vektor er det ikke nok at kende (den marginale) fordelingen af de enkeltestokastiske skalære variable, Xi, idet en sådan information ikke spe i erer den indbyrdesinteraktion mellem komponenterne. En stokastisk vektor kan derimod generelt karakteriseresved den simultane fordelingsfunktion givet ved:
FX(x1, x2, ..., xn) = P
n
X1 ≤ x1,X2 ≤ x2, ...Xn ≤ xn
o (3.89)Lidt kort skriver viFX(x) = FX(x1, x2, ..., xn) = P
n
X1 ≤ x1,X2 ≤ x2, ...Xn≤xn
o (3.90)
132 3.4 Stokastiske Vektoreridet vi har arrangeret de løbende variable x1, x2, ...xn i vektoren X. De stokastiske variableX1, X2, ..., Xn er uafhængige, hvis og kun hvis
FX(x) = FX(x1, x2, ..., xn) = FX1(x1)FX2(x2)...FXn (xn) (3.91)hvor FXi er den marginale fordeling af Xi. Når de indgående stokastiske skalære er uaf-hængige kan vi ud fra de marginale fordelinger bestemme den simultane fordeling, FX(x),for vektoren, X. Dette er det eneste tilfælde hvor kendskab til de marginale fordelinger ertilstrækkeligt til at bestemme den simultane fordeling, FX(x). På den anden side kan manaltid bestemme den marginale fordeling ud fra kendskabet til den simultane fordeling, idet:FXi(xi) = FX(∞, ..., xi, ...,∞) (3.92)Tæthedsfunktionen fX(x) er deneret ved:
FX(x) =
Z x1
−∞
Z x2
−∞...
Z xn
−∞fX (x1, x2, ..., xn)dxn...dx2dx1 (3.93)hvoraf (under passende forudsætninger):
fX (x) =dn
dx1dx2...dxn
FX(x1, x2, ..., xn) (3.94)Hvis g(X) er en (ikke nødvendigvis skalar) funktion af den stokastiske vektor X, da erforventnings værdien af g givet ved:E
n
g(X)o
=
Z ∞
−∞
Z ∞
−∞...
Z ∞
−∞g(x1, x2, ...xn)fX(x1, x2, ..., xn)dxn...dx2dx1 (3.95)eller kort skrevet som:
E
n
g(X)o
=
Z
Ωx
g(x)fX(x)dx (3.96)hvor Ωx er udfaldsrummet for vektoren X. Det kan vises, at forventningsværdidannelsen erlineær, d.v.s at:E
n
a1g1(X) + a2g2(X)o
= a1E
n
g1(X)o
+ a2E
n
g2(X)o (3.97)Som ved skalære stokastiske variable kan vi karakterisere fordelingen af en stokastisk vektorved at angive den karakteristiske funktion, der er deneret ved:
ϕx(ω) = ϕx(ω1, ω2, ..., ωn) = E
n
ejω⊤x
o (3.98)hvor:ω = (ω1, ω2, ..., ωn)⊤ (3.99)Antag, at der for elementerne, Xi, i vektoren X gælder, at:
E
n
Xi
o
= µi Varn
Xi
o
= σ2i (3.100)
Covn
Xi,Xj
o
= E
n
(Xi − µi)(Xj − µj)o
= σij = ρijσiσj (3.101)Bemærk, at:σij = σji og σii = σ
2i (3.102)

133Da gælder, at middelværdien er givet ved:mx = E
n
Xo
=
8
>
>
>
>
>
>
<
>
>
>
>
>
>
:
E
n
X1
o
E
n
X2
o...E
n
Xn
o
9
>
>
>
>
>
>
=
>
>
>
>
>
>
;
=
8
>
>
>
<
>
>
>
:
µ1
µ2...µn
9
>
>
>
=
>
>
>
;
(3.103)og at variansen er givet ved:Px = Var
n
Xo
= E
n
(X −mx)(X −mx)⊤o
=
8
>
>
>
<
>
>
>
:
σ11 σ12 ... σ1n
σ21 σ22 ... σ2n... ... ... ...σn1 σn2 ... σnn
9
>
>
>
=
>
>
>
;
(3.104)Bemærk, at varians matri en er symmetrisk og positiv semidenit. Desuden gælder:Sætning: 3.3 Antag, at X er en stokastisk vektor med middelværdi mx og varians Px. Daer:E
n
XX⊤o
= Px +mxm⊤x (3.105)
2Bevis: Variansen Px er deneret ved:Px = E
n
(X −mx)(X −mx)⊤o
= E
n
XX⊤ −Xm
⊤x −mxX
⊤ +mxm⊤x
o
= E
n
XX⊤o
− E
n
Xo
m⊤x −mxE
n
Xo⊤
+mxm⊤x
= E
n
XX⊤o
−mxm⊤x
2Eksempel: 3.9 Antag, at fejlen, et, mellem referen e signal og udgang er normalfordelt og et ∈N(2, 1). Den forventede værdi af kriteriefunktionen, J = E
n
e2t
o er da jvf. ovenstående sætningJ = 22 + 1 = 5. 2Sætning: 3.4 Lad X og Y være stokastiske vektorer med Y = g(X). Antag, at den om-vendte afbildning, g−1, eksisterer, og at både g og g−1 har kontinuerte aedte. Da gælder, attæthedsfunktionen for Y er givet ved:
fY (y) = fX
`
g−1(y)
´
Det
dg−1(y)
dy
ff (3.106)2

134 3.4 Stokastiske VektorerBevis: For en vilkårlig delmængde, S, af udfaldsrummet, Ωy , gælder at:P
n
Y ∈ So
= P
n
g(X) ∈ So
= P
n
X ∈ g−1(S)
o (3.107)MenP
n
Y ∈ So
=
Z
Ωy
fY (y)dy (3.108)ogP
n
Y ∈ So
=
Z
g−1(S)
fX(x)dx
=
Z
S
fX
`
g−1(y)
´
Det
„
dg−1(y)
dy
«
dxhvor sidste lighed følger af den velkendte regel for transformation af integraler. Derfor gælderat:Z
S
fY (y) − fX
`
g−1(y)
´
Det
„
dg−1(y)
dy
«
dx = 0 (3.109)for vilkårlig S. Dermed er sætningen bevist. 2Hvis de første momenter, middelværdi,mx, og varians, Px, eksisterer for en stokastisk vektor,X, skriver vi:
X ∈ F (mx, Px) (3.110)i analogi med notationen for den normale fordeling.De operationer, vi i det følgende kommer til at beskæftige os med, er lineære. Vi angiverderfor nogle regneregler for lineære operationer i nedenstående sætning 3.5.Sætning: 3.5 Antag, at X er en stokastisk vektor med n elementer, at Φ er en p×n matrixsamt at m er en vektor med n elementer. Antag yderligere, at Φ og m er konstante størrelsersamt at:X ∈ F (mx, Px)Da gælder at:
ΦX ∈ F
“
Φmx,ΦPxΦ⊤”
X +m ∈ F (mx +m,Px)
2Bevis: Vi udregner direkte at:E
n
ΦXo
= ΦE
n
Xo
= Φmx (3.111)E
n
X +mo
= E
n
Xo
+ E
n
mo
= mx +m (3.112)Var
n
ΦXo
= E
n
(ΦX − Φmx)(ΦX − Φmx)⊤o
= ΦE
n
(X −mx)(X −mx)⊤o
Φ⊤ = ΦPxΦ⊤

135Var
n
X +mo
= E
n
([X +m] − [mx +m])([X +m] − [mx +m])⊤o
= E
n
(X −mx)(X −mx)⊤o
= Px (3.113)2I de senere anvendelser kommer vi også til at beskæftige os med kvadratiske former ogkriterier. Vi angiver derfor her følgende sætning 3.6.Sætning: 3.6 Antag, at den stokastiske vektor, X, med n elementer har middelværdien mog variansen P . Lad S være en vilkårlig n× n matrix. Da er:
E
n
X⊤SXo
= m⊤Sm+ tr(SP ) (3.114)
2Bevis: Vi har at:E
n
X⊤SXo
= E
n
(X −m)⊤S(X −m) +m⊤SX
+X⊤Sm−m
⊤Smo
= E
n
(X −m)⊤S(X −m)o
+ E
n
m⊤SXo
+E
n
X⊤Smo
−E
n
m⊤Smo
= E
n
(X −m)⊤S(X −m)o
+ E
n
m⊤SmoDa nu sporet af en skalar er identisk med skalaren selv er (jvf. Appendix C):
(X −m)⊤S(X −m) = tr“
(X −m)⊤S(X −m)”
= tr“
S(X −m)(X −m)⊤” (3.115)og dermed er:
E
n
(X −m)⊤S(X −m)o
= E
n
tr“
(X −m)⊤S(X −m)”o
= tr“
SE
n
(X −m)(X −m)⊤o”
= tr (SP )
23.5 Afhængighed mellem Stokastiske VektorerAntag, at X og Y er to stokastiske vektorer med henholdsvis m og p elementer, samt at:Z =
»
X
Y
– (3.116)

136 3.5 Afhængighed mellem Stokastiske VektorerAfhængigheden mellem X og Y kan fuldstændigt spe i eres ved den simultane fordelings-funktion:FX,Y (x, y) = FZ(z) (3.117)eller ved den simultane tæthedsfunktion:fX,Y (x, y) = fZ(z) (3.118)Kovariansfunktionen mellem to stokastiske vektorer X og Y er givet ved:
Covn
X,Yo
= E
n
(X −mx)(Y −my)⊤o (3.119)
=
Z
Ω
(x−mx)(y −my)⊤fX,Y (x, y)dxdy (3.120)=
2
6
6
6
4
σ11 σ12 ... σ1p
σ21 σ22 ... σ2p... ... ... ...σn1 σn2 ... σnp
3
7
7
7
5
(3.121)hvor:σij = Cov
n
Xi, Yj
o
p = dim(Y ) n = dim(X) (3.122)Egenskaberne for kovariansfunktionen er opsummeret i følgende sætning.Sætning: 3.7 Antag, at X,Y og V er n-dimensionale stokastiske vektorer med endelig va-rians. Da gælder, atCov
n
X,Xo
= Varn
Xo
Covn
X,Yo
= Covn
Y,Xo⊤
Covn
ΦX,Yo
= ΦCovn
X,Yo
Covn
X,ΦYo
= Covn
X,Yo
Φ⊤
Covn
X + V, Yo
= Covn
X,Yo
+ Covn
V, Yo
2Bevis: Idet vi anvender denitionen, 3.121, har vi at:Cov
n
X,Xo
= E
n
[X −mx][X −mx]⊤o
= Varn
Xoog at:
Covn
X,Yo⊤
=
„Z
Ω
(x−mx)(y −my)⊤fX,Y (x, y)dxdy
«⊤
=
Z
Ω
(y −my)(x−mx)⊤fX,Y (x, y)dxdy
= Covn
Y,Xo

137og videre at:Cov
n
ΦX + V, Yo
=Z
Ω
(Φx+ v − [Φmx +mv])(y −my)⊤fX,Y,V (x, y, v)dxdydv
= Φ
Z
Ω
(x−mx)(y −my)⊤fX,Y,V (x, y, v)dxdydv
+
Z
Ω
(v −mv)(y −my)⊤fX,Y,V (x, y, V )dxdydv
= Φ
Z
Ωx,y
(x−mx)(y −my)⊤fX,Y (x, y)dxdy
+
Z
Ωy,v
(v −mv)(y −my)⊤fY,V (y, V )dydv
= ΦCovn
X,Yo
+ Covn
V, Yo
2Til supplement af regne reglerne i sætning 3.3 anføres nedenstående sætning 3.8.Sætning: 3.8 Antag, at X og V er stokastiske vektorer hvorX ∈ F (mx, Px) ∈ R
nV ∈ F (mv, Pv) ∈ R
n
Covn
V,Xo
= Rat Φ ∈ Rp×n og m ∈ R
n er konstante størrelser. Da gælder at:Y E
n
Yo
Varn
Yo
Covn
Y,Xo
ΦX Φmx ΦPxΦ⊤ ΦPxX+m mx +m Px PxX+V mx +mv Px +R⊤ +R+ Pv Px +R
2Bevis: Middelværdi og varians for ΦX og X +m er kun repeteret fra sætning 3.5. Viderehar vi at:Cov
n
ΦX,Xo
= E
n
(ΦX − Φmx)(X −mx)⊤o
= ΦPx
Covn
X +m,Xo
= E
n
(X +m− [mx +m])(X −mx)⊤o
= Px
E
n
X + Vo
= E
n
Xo
+ E
n
Vo
= mx +mvLad os anvende notationen X = X −mx og tilsvarende for V . Da er:Var
n
X + Vo
= E
n
[X + V ] × [X + V ]⊤o
= E
n
XX⊤ + XV
⊤ + V X⊤ + V V
⊤o
= Px +R⊤ +R+ Pv

138 3.5 Afhængighed mellem Stokastiske Vektorer2Disse regneregler for lineære operationer er basis elementer i analysen af lineære stokastiskesystemer, idet både pro es ligningen og observations ligningen er af formen:
Y = ΦX + ΓV (3.123)hvor Φ og Γ er konstante (d.v.s. ikke stokastiske variable).Eksempel: 3.10 Vi vil i de senere kapitler se, at pro es ligningen for et lineært stokastisk systemer af formen:xt+1 = Φxt + Γut + vt (3.124)mens observations ligningen for samme er på formen:
yt = ϕ⊤xt + et (3.125)hvor tilstands vektoren, xt, observations vektoren, yt, pro esstøjsvektoren, vt, og målestøjsvektoren,et, er stokastiske vektorer. I den del af kurset, som omhandler system identikation (herunder ogsåadaptiv regulering) vil vi ofte møde en pro esmodel af formen:
yt = ϕ⊤θ + et (3.126)hvor ϕt er en vektor, bestående af (kendte) regressorer. Elementerne i θ er de systemparametre somvi vil estimere. Alle disse ligninger er alle lineære operationer på stokastiske variable. 2Vi angiver her en simpel anvendelse af sætning 3.8.Sætning: 3.9 Antag, at X (dim. n) og V (dim. p) er stokastiske vektorer, at Φ (p × n) eren konstant størrelse. Antag yderligere at:X ∈ F (mx, Px) V ∈ F (mv, Pv)
Covn
V,Xo
= Rhvor p = dim(V ) og n = dim(X). Lad Y fremkomme af den lineære operation:Y = ΦX + V (3.127)Da gælder at:
Y ∈ F
“
Φmx +mv, ΦPxΦ⊤ +RΦ⊤ + ΦR⊤ + Pv
”
Covn
Y,Xo
= ΦPx +R
2Bevis: Vi indfører en hjælpevariabel, ξ = ΦX. Vi har ved anvendelse af regne reglerne:E
n
ξo
= Φmx Varn
ξo
= ΦPxΦ⊤Cov
n
ξ,Xo
= ΦPxog videre at:E
n
Yo
= E
n
ξo
+mv = Φmx +mv
Varn
Yo
= Varn
ξo
+ Covn
V, ξo⊤
+ Covn
V, ξo
+ Pv
= ΦPxΦ⊤ +RΦ⊤ + ΦR⊤ + Pv

139Cov
n
Y,Xo
= Covn
ξ,Xo
+ Covn
V,Xo
= ΦPx +R
2Denne sætning har et meget vigtigt spe ialtilfælde, som vi kommer til at anvende i denfølgende behandling af stokastiske systemer.Sætning: 3.10 Antag, at X og V er stokastiske vektorer med henholdsvis n og p elementer,at Φ (p× n) er en konstant størrelse og at:X ∈ F (mx, Px) V ∈ F (0.Pv) Cov
n
V,Xo
= 0hvor p = dim(V ) og n = dim(X). Lad Y fremkomme af den lineære operation:Y = ΦX + V (3.128)Da gælder at:
Y ∈ F
“
Φmx,ΦPxΦ⊤ + Pv
”
Covn
Y,Xo
= ΦPx
2Bemærk, at spe ialiseringen i forhold til sætning 3.9 består i, at middelværdien af V er nulog at V er ukorreleret med X. I de senere afsnit skal vi se, at dette ofte netop er tilfældetfor både pro es - og observations ligningen i beskrivelsen af stokastiske systemer.Vi kan for stokastiske vektorer gennemføre præ is de samme overvejelser, som i det skalæretilfælde fører frem til ligning 3.72. Som i det skalære tilfælde kan vi angive fordelingen afY betinget X. Vi karakteriserer denne fordeling med den betingede tæthedsfunktion, der ergivet ved:
fY |X(y|x) =fY,X (y, x)
fX(x)=fZ(z)
fX(x)(3.129)som er den tæthed, der beskriver Y , hvis udfaldet af X kendes. Det bemærkes, at fY |X eren stokastisk variabel. For betingede fordelinger har vi følgende sætning:Sætning: 3.11 Lad X og Y være to stokastisk variable. Da gælder:
fY |X(y|x) ≥ 0
Z
Ωy
fY |X(y|x)dy = 1
fY |X(y|x) = fY (y) hvis X og Y er uafhængige2Bevis: Punkt 1 og 2 følger af at fY |X er en tæthedsfunktion. Hvis X og Y er uafhængigeer:
fX,Y (x, y) = fX(x)fY (y)og punkt 3 følger dermed af denitionen på betinget tæthed. 2Vi angiver nu en sætning vi kommer til at bruge i forbindelse med analysen af stokastiskesystemer og pro esser.
140 3.5 Afhængighed mellem Stokastiske VektorerSætning: 3.12 Lad X og Y være to stokastiske variable. Da gælder at:fY (y) =
Z
Ωx
fY |X(y|x)fX(x)dx
2Bevis: Fra ligning 3.129 har vi at:fY,X (y, x) = fY |X(y|x)fX(x)Den marginale fordeling af Y fremkommer af den simultane ved at integrere, d.v.s. at:
fY (y) =
Z
Ωx
fY,X (y, x)dx =
Z
Ωx
fY |X(y|x)fX(x)dx
2Denne sætning fortæller, at hvis man kender overgangs fordelingen (d.v.s den betingedetæthed fY |X) og fordelingen (tætheden) for en stokastisk variabel X kan man beregnefordelingen af den stokastiske variabel, Y. Dette er spe ielt anvendeligt i forbindelse medbestemmelse af fordelingen for system tilstande. Kendes f.eks. fordelingen af nuværende til-stande (X) og kendes overgangs fordelingen (Y |X) kan fordelingen af fremtidige tilstande(Y ) bestemmes. Der er dermed skabt en rekursiv metode til bestemmelse af udviklingen affordelingen for et stokastisk systems tilstande. Som det fremgår af det efterfølgende eksem-pel kan opdatering af fordelingen ifølge (3.129) erstattes af en opdatering af parametre, derbeskriver fordelingerne.Eksempel: 3.11 I afsnit 3.6, der omhandler normalfordelingen, er følgende sætning (sætning3.21) bevist. Antag at
X ∈ N(mx, Px)og atY |X ∈ N(ΦX, Pv)da gælder at:
Y ∈ N(Φmx,ΦPxΦ⊤ + Pv)Bemærk, at i dette tilfælde har vi parametriseret fordelingerne, hvilket har resulteret i en opdateringaf disse parametre og ikke som i det generelle tilfælde en opdatering af en tæthedsfunktion. 2Vi angiver nu Bayes sætning for vektorer. Denne sætning danner bl. a. grundlag for etestimationsprin ip, som vi senere vil anvende.Sætning: 3.13 Lad X og Y være stokastiske variable. Da gælder at:fX|Y (x|y) =
fY |X(y|x)fX(x)
fY (y)
2Bevis: Sætningen følger umiddelbart af 3.129 idet:fX|Y (x|y) =
fY,X (y, x)
fY (y)=fY |X(y|x)fX(x)
fY (y)

1412Den betingede forventningsværdidannelsen er deneret som:
E
n
g(X)|yo
=
Z
Ω
g(x)fX|Y (x|y)dxSpe ielt er den betingede middelværdi og varians (hvis de eksisterer) givet ved:mx|y = E
n
X|Yo
=
Z
Ω
xfX|Y (x|y)dxog:Px|y = Var
n
X|Yo
= E
n
(X −mx|y)(X −mx|y)⊤|Yo
=
Z
Ω
(X −mx|y)(X −mx|y)⊤fX|Y (x|y)dxEgenskaber for den betingede forventningsværdidannelse er resumeret i følgende sætning3.14.Sætning: 3.14 Lad V,X og Y være stokastiske variable, a og b konstanter og g(Y ) enfunktion. Antag at E
n
Xo
,En
Yo og E
n
g(Y )o eksisterer. Da gælder:
E
n
X|Yo
= E
n
Xo hvis X og Y er uafhængige
E
n
Xo
= E
n
E
n
X|Yoo
E
n
g(Y )X|Yo
= g(Y )En
X|Yo
E
n
g(Y )Xo
= E
n
g(Y )EX|Yo
E
n
a|Yo
= a
E
n
g(Y )|Yo
= g(Y )
E
n
aX + bV |Yo
= aEn
X|Yo
+ bEn
V |Yo
2Bevis: Vi vil indskrænke os til kun at bevise 3.130. Vi harE
n
X|Yo
=
Z
Ωx
xfX|Y (x|y)dxog dermed at:E
n
E
n
X|Yoo
=
Z
Ωy
Z
Ωx
xfX|Y (x|y)dxff
fY (y)dy
=
Z
Ωx
x
Z
Ωy
fX|Y (x|y)fY (y)dydx
= E
n
Xo

142 3.6 Den Vektorielle Normalfordeling2I fuldstændig analogi med sætning 3.6 kan vi anføre følgende sætning 3.15.Sætning: 3.15 Antag, at den stokastiske vektor, X, betinget Y har middelværdien x ogvariansen Px|y , d.v.s.:
E
n
X|Yo
= x E
n
(X − x)(X − x)⊤|Yo
= Px|yDa er:E
n
X⊤SX|Y
o
= x⊤Sx+ tr(SPx|y)
2Bevis: Beviset er fuldstændig analogt med beviset for sætning 3.6, blot er forventnings-værdidannelsen betinget. 23.6 Den Vektorielle NormalfordelingDer ndes adskillige måder at denere den multivariate normalfordeling på. En måde er somi det skalare tilfælde at angive tæthedsfunktionen. Det er imidlertid ikke nemt ud fra dennedenition at vise, hvorvidt to stokastiske vektorer, der begge er marginalt normalfordelte,også simultant er normalfordelte. Vi anvender derfor en anden fremgangsmåde, der byggerpå denitionen i det skalare tilfælde.Denition: 3.2 En stokastisk vektor, X, siges at være normalfordelt, hvis og kun hvisder for enhver vektor a gælder, at skalaren:a⊤X (3.130)er normalfordelt. 2Denitionen kan verbalt udtrykkes på følgende måde: X er normalfordelt hvis alle linear-kombinationer af elementerne i X er normalfordelte.Bemærkning: 3.1 En simpel følge af denitionen er, at hvis X er normalfordelt, da erogså Xi = (0, ..., 1, ..., 0)X normalfordelt, d.v.s. at elementerne i X marginalt er normalfor-delte. Det skal samtidigt bemærkes, at det omvendte ikke i al almindelighed er tilfældet.Det gælder hvis Xi er stokastisk uafhængige. 2En enkel følge af denitionen er, at hvis Y fremkommer som en p-dimensional linearkombina-tion af elementerne i X (dim = n), og hvis X er normalfordelt, da er Y også normalfordelt.Sætning: 3.16 Antag, at:
X ∈ N(mx, Px)

143hvor X = (X1, ..., Xn)⊤. Lad m være en vektor (dim = p) og lad Φ være en p × n konstantmatrix. Da gælder, at:Y = ΦX +m ∈ N(Φmx +m,ΦPxΦ⊤)
2Bevis: Vi skal kun kontrollere, at enhver linearkombination a⊤Y er normalfordelt. Vi har,at:a⊤Y = (a⊤Φ)X + a
⊤mhvor a⊤Φ er en p-dimensional vektor. Da X er en n-dimensional normalfordelt vektor, er
(a⊤Φ)X normalfordelt. Da a⊤m er en konstant, er sætningen bevist. 2Vi anfører nu uden bevis den omvendte sætning, nemlig:Sætning: 3.17 Antag at X er en n-dimensional vektor og X ∈ N(mx, Px). Lad ρ =rang(Px). Da eksisterer en matrix Φ ∈ R
n×ρ samt ρ uafhængige stokastiske skalarer ζi ∈N(0, 1), i = 1, ..., ρ således at Px = ΦΦ⊤ og
X = Φζ +mxhvor ζ = (ζ1, ζ2, ..., ζρ)⊤. 2Hvis rang(Px) = n siges X at være ikke singulær. Med ovenstående sætning kan vi endeligangive tæthedsfunktionen for en normalfordelt stokastisk vektor.Sætning: 3.18 Hvis X har en n-dimensional, ikke singulær normalfordeling med middelværdi
mx og varians Px, da er frekvensfunktionen for X givet ved:fX(x) =
1p
Det(Px)`√
2π´n exp−1
2(x−mx)⊤P−1
x (x−mx)
2Bevis: Vi anvender først at:X = Φζ +mxhvor ΦΦ⊤ = Px. Tæthedsfunktionen for ζ ndes let, idet elementerne er uafhængige.
fζ(ζ) = fζ1 (ζ1) × fζ2 (ζ2) × ...× fζn (ζn) =nY
i=1
ϕN (ζi)
=nY
i=1
1√2πe− 1
2ζ2
i
=1
`√2π´n e
− 12
ζ⊤ζhvorζ = (ζ1, ζ2, ..., ζn)⊤Resten af beviset er en følge af sætning 3.4, idet funktionen g(ζ) = Φζ + mx opfylderforudsætningerne for sætning 3.4. 2

144 3.6 Den Vektorielle NormalfordelingEksempel: 3.12 Dette eksempel vedrører en todimensional normalfordelt stokastisk variabel.Antag at:X =
„
X1
X2
«
∈ N
„»
12
–
,
»
1 0.260.26 1.69
–«Marginalt er X1 ∈ N(1, 1) og X2 ∈ N(2, 1.69). Deres marginale 99%-kondensintervaller er følgeliggivet (−1.58; 3.58) henholdsvis (−1.35; 5.34). Disse to marginale kondensintervaller er illustrereti gur 3.5 som et rektangel. Samtidig er 99%-kondensintervallet for X angivet (en ellipse, menmere herom senere i eksempelsekvensen 3.13-3.16). 2
-4 -2 0 2 4 6-4
-3
-2
-1
0
1
2
3
4
5
6
x1
x2
Figur 3.5. De to marginale kondensintervaller er angivet ved et rektangelIntentionen med følgende eksempel sekvens 3.13-3.16 er illustrerer fordelinger for stokastiskevektorer samt disses kondensområder.Eksempel: 3.13 Antag at en todimensional stokastisk vektor er normalfordelt:X =
„
X1
X2
«
∈ N
„»
00
–
,
»
1 00 1
–«dvs. at X1 og X2 er stokastisk uafhængige og marginalt er N(0, 1)−fordelt. Da gælder at:2X
i=1
X2i ∈ χ2(2)hvilket igen betyder at området:
X21 + X2
2 ≤ fχ2(2)1−αdvs. en irkel med entrum i origo og en radius på qfχ2
1−α(2) udgør et 1 − α-kondensområde (segur 3.6 area a). 2Eksempel: 3.14 Antag nu at den todimensionelle stokastiske vektor er normalfordelt med:X =
„
X1
X2
«
∈ N
„»
00
–
,
»
σ21 00 σ2
2
–«

145-4 -2 0 2 4 6
-4
-2
0
2
4
6area a
x1
x2
-4 -2 0 2 4 6-4
-2
0
2
4
6area b
x1
x2
-4 -2 0 2 4 6-4
-2
0
2
4
6area c
x1
x2
-4 -2 0 2 4 6-4
-2
0
2
4
6area d
x1
x2
Figur 3.6. 99% kondensområder.dvs. at X1 og X2 er stokastisk uafhængige og marginalt er N(0, σ2i )−fordelt (i = 1, 2). Da gælderat:
2X
i=1
X2i
σ2i
∈ χ2(2)Dette betyder at området:X2
1
σ21
+X2
2
σ22
≤ fχ2
1−αudgør et α-kondensområde. Området er en ellipse med hovedakser i enhedsvektorernes retning.Hovedaksernes længde er σi
q
fχ2(2)1−α , i = 1, 2. I gur 3.6 area b er 99%-kondensområdet illustreretfor σ2
1 = 1 og σ22 = 1.3. 2Eksempel: 3.15 Antag at en todimensional stokastisk vektor er normalfordelt med:
X =
„
X1
X2
«
∈ N
„»
00
– »
1 0.260.26 1.69
–« (3.131)dvs. at X1 og X2 er stokastisk afhængige og marginalt er N(0, 1) og N(0, 1.69) fordelt. Korrela-tionkoe ienten mellem de to stokastiske variable er ρ = 0.2. Da nu variansmatri en:P =
»
1 0.260.26 1.69
– (3.132)kan skrives (se f.eks. (Fabri ius-bjerre 1974) eller appendix C) som:P = V DV ⊤ V =
»
0.9483 0.3173−0.3173 0.9483
–
D =
»
0.9130 00 1.770
– (3.133)hvor D i diagonalen indeholder egenværdierne til P og hvor søjlerne i V er de tilsvarende egen-vektorer. Idet P er symmetrisk er disse egenvektorer indbyrdes ortogonale (dvs. V ⊤V = I) og kanudgøre et basis (her i R2). Lad ξ være en stokastisk vektor i dette ny koordinatsystem, dvs.:ξ = V ⊤X ∈ N(0, V ⊤PV ) = N(0, D) (3.134)
146 3.6 Den Vektorielle NormalfordelingIfølge eksempel 3.14 er 1 − α−kondensintervallet for ξ en ellipse med hovedakser i basisvek-torernes retning. Det vil i dette tilfælde sige i retning af egenvektorerne for P−matri en. 1 −α−kondensintervallet for X er altså en ellipse som angivet i gur 3.6 area med hovedakserne iegenvektorernes retning og en længde lig med λi
q
fχ2(2)1−α , hvor λ2
i er egenværdier til P−matri en.2Eksempel: 3.16 Antag at en todimensional stokastisk vektor er normalfordelt med:
X =
„
X1
X2
«
∈ N
„»
11
– »
1 0.260.26 1.69
–« (3.135)dvs. at X1 og X2 er stokastisk afhængige og marginalt er N(1, 1) og N(1, 1.69) fordelt. Vi kan nusom i eksempel 3.15 skrives variansmatri en som:P = V DV ⊤ (3.136)hvor V og D er angivet i eksempel 3.15. Vi kan igen fortage en transformation, hvor:
ξ = V ⊤(X − m) (3.137)er en N(0, D)−fordelt stokastisk vektor givet i et koordinatsystem med egenvektorerne til P−matri ensom basisvektorer og origo angivet med middelværdivektoren m. Følgelig, er 1−α−kondensintervalletfor X en ellipse med entrum i m som angivet i gur 3.6 area d med hovedakserne i egenvektorernesretning og en længde lig med λi
q
fχ2(2)1−α , hvor λ2
i er egenværdier til P−matri en. En egenværdi-analyse af en variansmatrix er et meget nyttigt værktøj til f.eks. at bestemme en given stokastiskvektors dominerende variationsretninger. 2Som før nævnt vil vi beskæftige os med lineære operationer på stokastiske variable (vektorer),altså relationer af typen:Y = ΦX + V (3.138)hvor Y,X og V er stokastiske vektorer. I denne forbindelse er det et interessant spørgsmålhvilken information en måling af Y (et udfald af den stokastiske variabel Y ) vil give om X.Typisk vil man være interesseret i at udnytte denne information til at estimere værdien af
X. Et andet interessant spørgsmål, som vi kun har behandlet med hensyn til de to førstemomenter (d.v.s. middelværdi og varians), er om vi kan bestemme fordelingen af Y , nårvi kender fordelingen af X samt overgangs fordelingen, d.v.s. fordelingen af Y |X. Disseproblemer skal i det følgende belyses vha. en række sætninger (sætn. 3.19-3.23). Vi angiverførst projektionssætningen.Sætning: 3.19 Lad X og Y simultant være normalfordelt, d.v.s.:„
X
Y
«
∈ N
„»
mx
my
–
,
»
Px Pxy
P⊤xy Py
–« (3.139)Da gælder, at:X|Y ∈ N(mx|y, Px|y) (3.140)hvor:
mx|y = mx + PxyP−1y (y −my) (3.141)
Px|y = Px − PxyP−1y P
⊤xy (3.142)Desuden er X −mx|y og Y uafhængige. 2

147Bevis: Vi har indledningsvis, at den stokastiske vektor:Z =
„
X
Y
«
∈ N
„»
mx
my
–
,
»
Px Pxy
P⊤xy Py
–«
= N(mz, Pz)har tæthedsfunktionen:fZ(z) =
1p
Det(Pz)`√
2π´n exp−1
2(z −mz)
⊤P
−1z (z −mz)hvor p = dim(Y ) og n = dim(X). Ved anvendelse af sætning 3.13 nder vi at X|Y hartætheden:
fX|Y (x|y) =fX,Y
fY (y)=fZ(z)
fY (y)
=
p
Det(Py)(2π)p
p
Det(Pz)(2π)p+n
×exp
−1
2(z −mz)
⊤P
−1z (z −mz)
+1
2(y −my)⊤P−1
y (y −my)
ff
= κe− 1
2αhvor vi har indført hjælpevariablene α og κ. Ifølge appendix C vedr. matrix kalkyler har vi,at:
P−1z =
D−1 −D−1PxyP−1y
−P−1y P⊤
xyD−1 P−1
y + P−1y P⊤
xyD−1PxyP
−1y
ffhvor S hur komplementet til Px er givet ved:D = Px − PxyP
−1y P
⊤xyVi kan derfor ved indsættelse af z udregne:
α =
x−mx
y −my
ff⊤P
−1z
x−mx
y −my
ff
−(y −my)⊤P−1y (y −my)
= (x−mx)⊤D−1(x−mx
−(x−mx)⊤D−1PxyP
−1y (y −my)
−(y −my)⊤P−1y P
⊤xyD
−1(x−mx)
+(y −my)⊤(P−1y + P
−1y P
⊤xyD
−1PxyP
−1y )(y −my)
−(y −my)⊤P−1y (y −my)
= (x−mx)⊤D−1(x−mx)−(x−mx)⊤D−1
PxyP−1y (y −my)
−(y −my)⊤P−1y P
⊤xyD
−1(x−mx)
+(y −my)⊤(P−1y P
⊤xyD
−1PxyP
−1y )(y −my)
=˘
x− [mx + PxyP−1y (y −my)]
¯⊤D
−1
ע
x− [mx + PxyP−1y (y −my)]
¯

148 3.6 Den Vektorielle NormalfordelingLigeledes fra appendix D har vi, at:Det(Pz) = Det(Py)Det(D)hvorved:
κ =
p
Det(Py)(2π)p
p
Det(Pz)(2π)p+n
=1
p
Det(D)(2π)nHermed er sætningens første del bevist. For at bevise den sidste del udregner vi:Cov
n
(X −mx|y)(Y −my)⊤o
= E
n
(X −mx − PxyP−1y (Y −my)(Y −my)⊤
o
= E
n
(X −mx)(Y −my)⊤o
−PxyP−1y E
n
(Y −my)(Y −my)⊤o
= Pxy − PxyP−1y Py = 0Da X −mx|y og Y er normalfordelte, er dette ensbetydende med at de er uafhængige. 2Eksempel: 3.17 I dette eksempel vil vi anvende sætning 3.19 i et tilfælde, hvor X og Y er toskalare stokastiske variable, der simultant er normalfordelt, d.v.s. at:
„
XY
«
∈ N
„
mx
my
ff
,
σ2x ρσxσy
ρσxσy σ2y
ff«Anvendelsen af sætning 3.19 giver, at X betinget Y er normalfordelt, d.v.s. at:X|Y ∈ N(m, σ2)hvor:
m = mx + ρσx
σy(y − my) (3.143)
σ2 = (1 − ρ2)σ2x (3.144)Bemærk, hvorledes korrelationen inuerer på den informationsmængde som en måling af Y giver.Hvis vi har en meget høj grad af samvariation (i grænsen ρ = 1), da vil en måling af Y giveanledning til en lille usikkerhed på X (lille varians). Omvendt vil en måling af Y ikke tilføre nogeninformation om X, hvis de to stokastiske variable er uafhængige. 2Som før nævnt vil vi i det følgende beskæftige os med lineære operationer på stokastiskevariable (vektorer), altså relationer af typen:
Y = ΦX + V (3.145)hvor Y,X og V er stokastiske vektorer. I denne forbindelse har vi nogle interessante proble-mer, blandt andet estimationsproblemet. Et andet interessant spørgsmål, som vi kun harbehandlet med hensyn til de to første momenter (d.v.s. middelværdi og varians) er, om vikan bestemme fordelingen af Y , når vi kender fordelingen af X og overgangsfordelingen,d.v.s. fordelingen af Y |X.
149Sætning: 3.20 Antag at:X ∈ N(mx, Px) (3.146)og at:Y |X ∈ N(ΦX,Pv) (3.147)Da gælder at:
Z =
X
Y
ff
∈ N
„
mx
Φmx
ff
,
Px PxΦ⊤
ΦPx ΦPxΦ⊤ + Pv
ff« (3.148)2Bevis: Indledningsvis har vi at:
fX(x) =1
p
Det(Px)`√
2π´n
×exp−1
2(x−mx)⊤P−1
x (x−mx)og at:fX|Y (x|y) =
1p
Det(Pv)`√
2π´p exp−1
2(y − Φx)⊤P−1
v (y − Φx) (3.149)Dermed er:fY |X(y|x)fX(x) =
1p
Det(Px)Det(Px)`√
2π´n+p
e− 1
2α(x,y) (3.150)hvor
α(x, y) = (y − Φx)⊤P−1v (y − Φx) + (x−mx)⊤P−1
x (y −mx) (3.151)Vi skal nu blot vise at fY |XfX kan skrives som:fX,Y (x, y) =
1p
Det(Σ)`√
2π´n+p
exp
(
−1
2
x−mx
y − Φmx
ff⊤Σ−1
x−mx
y − Φmx
ff
)(3.152)hvor:Σ =
Px PxΦ⊤
ΦPx ΦPxΦ⊤ + Pv
ff (3.153)Da, det nemmeste er at regne tilbage, indfører vi S hur komplementet (til blokken Σ22):D = ΦPxΦ⊤ + Pv − (ΦPx)(P−1
x )(PxΦ⊤) = Pv (3.154)hvorved vi kan skrive:Σ−1 =
P−1x + Φ⊤D−1Φ −Φ⊤D−1
−D−1Φ D−1
ff
=
P−1x + Φ⊤D−1Φ −Φ⊤P−1
v
−P−1v Φ P−1
v
ff (3.155)
150 3.6 Den Vektorielle NormalfordelingLad endvidere:β(x, y) =
x−mx
y − Φmx
ff⊤Σ−1
x−mx
y − Φmx
ff
=
x−mx
y − Φmx
ff⊤P−1
x + Φ⊤D−1Φ −Φ⊤P−1v
−P−1v Φ P−1
v
ff
×
x−mx
y − Φmx
ff
= (x−mx)⊤P−1x (x−mx)
+(x−mx)⊤Φ⊤D
−1Φ(x−mx)−(x−mx)⊤Φ⊤
P−1v (y − Φmx)
−(y − Φmx)⊤P−1v Φ(y − Φmx)
+(y − Φmx)⊤P−1v (y − Φmx)
= (x−mx)⊤P−1x (x−mx)
+(Φx− Φmx)⊤D−1(Φx− Φmx)−(Φx− Φmx)⊤P−1
v (y − Φmx)−(y − Φmx)⊤P−1
v Φ(y − Φmx)+(y − Φmx)⊤P−1
v (y − Φmx)= (x−mx)⊤P−1
x (x−mx)+(y − Φmx)⊤P−1
v (y − Φmx)= α(x, y)Endelig er:
Det(Σ) = Det(Px)Det(D) = Det(Px)Det(Pv) (3.156)hvormed vi har vist, at fY |X(x|y)fX(x) = fY,X (y, x) er givet ved f(x, y). 2Sætning 3.20 giver os den simultane fordeling af Y og X, når vi kender fordelingen af X ogovergangsfordelingen, d.v.s. fordelingen af Y |X. Vi kan desuden ved hjælp af denne sætningberegne den marginale fordeling af Y.Sætning: 3.21 Antag at:X ∈ N(mx, Px) (3.157)og at:Y |X ∈ N(ΦX,Pv) (3.158)Da gælder at:
Y ∈ N(Φmx,ΦPxΦ⊤ + Pv) (3.159)2Bevis: Sætning 3.20 giver os direkte at:
X
Y
ff
∈ N
„
mx
Φmx
ff
,
Px PxΦ⊤
ΦPx ΦPxΦ⊤ + Pv
ff« (3.160)hvorved Y marginalt har den angivne fordeling. 2Endelig kan vi kombinere sætning 3.19, 3.20 og 3.21 i følgende:
151Sætning: 3.22 Antag at:X ∈ N(mx, Px) (3.161)og at:Y |X ∈ N(Φx, Pv) (3.162)Da gælder at:
X
Y
ff
∈ N
„
mx
Φmx
ff
,
Px PxΦ⊤
ΦPx ΦPxΦ⊤ + Pv
ff« (3.163)Y ∈ N(Φmx,ΦPxΦ⊤ + Pv) (3.164)og at:
X|Y ∈ N(mx|y, Px|y) (3.165)hvor:mx|y = mx + PxΦ⊤(ΦPxΦ⊤ + Pv)−1(y − Φmx) (3.166)
Px|y = Px − PxΦ⊤(ΦPxΦ⊤ + Pv)−1ΦPx (3.167)Afvigelsen X −mx|y er uafhængig af Y . 2Bevis: Sætningens første del er blot en repetition af sætning 3.20 og 3.21. Fordelingen forX|Y fremkommer ved indsættelse af Pxy og Py i sætning 3.19. 2Eksempel: 3.18 Ole har fået til opgave at måle vanddybden i Kimmerslev sø. Ole har ind-ledningsvis fået at vide at vanddybden erfaringsmæssigt varierer mellem 21.5 m og 26.6 m (99%kondensinterval). Ole tager derfor en snor, et lod med talje samt en til formålet lejet båd og be-giver sig ud på midt på søen ( irka). Ole fastgør den ene ende af snoren til båden, sænker talje oglod ned til bunden og markerer (aæser) længden af snoren. Bemærk, at denne aæsning er irkadobbelt så stor som dybden. Endelig ved Ole, at målingen er forbundet med en vis usikkerhed, pågrund af at bunden er relativ dius (bundslam et ). Han skønner overslagsmæssigt at aæsningener forbundet med en usikkerhed på ± 0.75 m (99% kondensinterval).Under en normalfordelingsantagelse ved Ole a`priori, at vanddybden, h, har en middelværdi omkring24.1 m ((21.5+26.6)/2=24.05) og en varians på a 0.98 m2, ([(26.6−21.5)/(2×2.5758)]2 = 0.980)d.v.s. at:
h ∈ N(µ, σ20) = N(24.1, 0.98m2) (3.168)Måleusikkerheden opgøres på samme måde (under en normalfordelingsantagelse) til at have envarians på 0.085 m2 ([(2 × 0.75)/(2 × 2.5758)]2 = 0.0848), hvormed vi har at:
y|h ∈ N(2h, σ2) = N(2h, 0.085m2) (3.169)Nu foretager Ole en måling og resultatet er 51.8m. Nu kan Ole v.hj.a. sætning 3.22 beregne at:mh|y =
2σ20
4σ20 + σ2
(y − 2µ)
= 24.1m +2 × 0.98
4 × 0.98 + 0.085(51.8m − 2 × 24.1m)
= 25.86m
Ph|y = σ20 − (2σ2
0)2
4σ20 + σ2
= σ20
8
<
:
1 − 1
1 + σ2
4σ20
9
=
;
= 0.0208m2
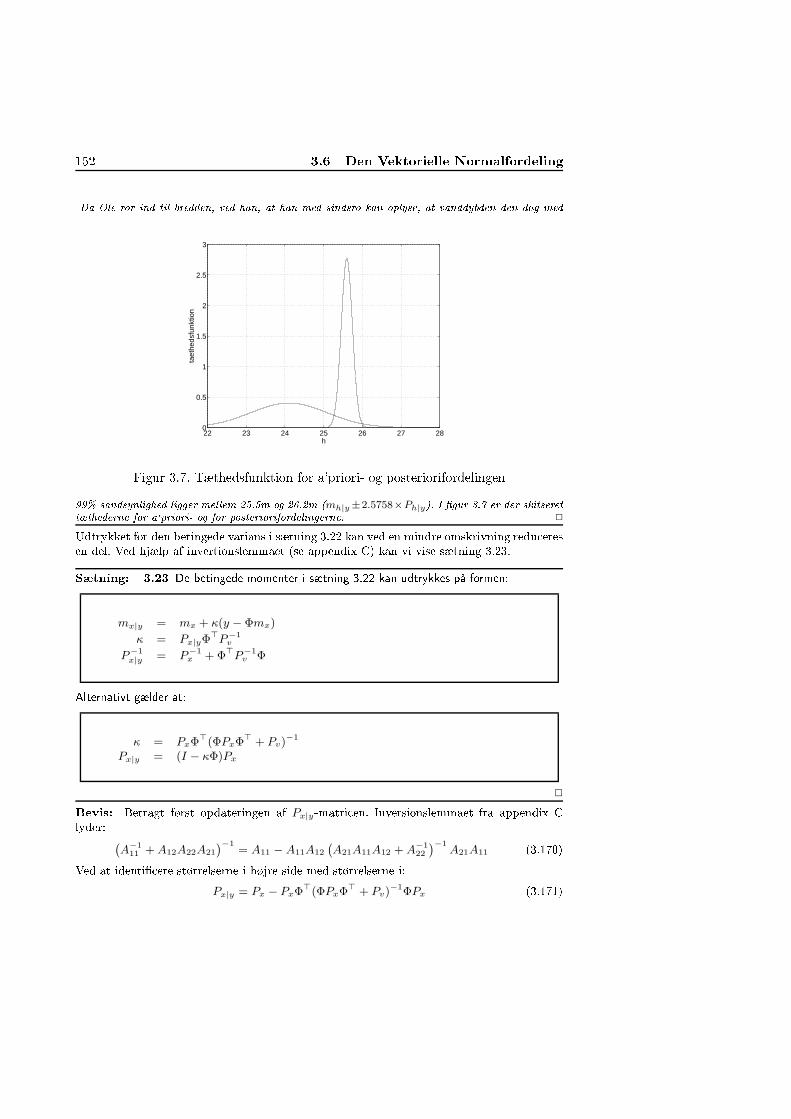
152 3.6 Den Vektorielle NormalfordelingDa Ole ror ind til bredden, ved han, at han med sindsro kan oplyse, at vanddybden den dag med
22 23 24 25 26 27 280
0.5
1
1.5
2
2.5
3
taet
heds
funk
tion
hFigur 3.7. Tæthedsfunktion for a'priori- og posteriorifordelingen99% sandsynlighed ligger mellem 25.5m og 26.2m (mh|y ±2.5758×Ph|y). I gur 3.7 er der skitserettæthederne for a`priori- og for posteriorifordelingerne. 2Udtrykket for den betingede varians i sætning 3.22 kan ved en mindre omskrivning redu eresen del. Ved hjælp af invertionslemmaet (se appendix C) kan vi vise sætning 3.23.Sætning: 3.23 De betingede momenter i sætning 3.22 kan udtrykkes på formen:mx|y = mx + κ(y − Φmx)
κ = Px|yΦ⊤P
−1v
P−1x|y = P
−1x + Φ⊤
P−1v ΦAlternativt gælder at:
κ = PxΦ⊤(ΦPxΦ⊤ + Pv)−1
Px|y = (I − κΦ)Px
2Bevis: Betragt først opdateringen af Px|y-matri en. Inversionslemmaet fra appendix Clyder:`
A−111 +A12A22A21
´−1= A11 − A11A12
`
A21A11A12 + A−122
´−1A21A11 (3.170)Ved at identi ere størrelserne i højre side med størrelserne i:
Px|y = Px − PxΦ⊤(ΦPxΦ⊤ + Pv)−1ΦPx (3.171)

153(fra sætning 3.22) får vi at:A11 = Px A12 = Φ⊤ (3.172)A21 = Φ A22 = P
−1v (3.173)Vi opskriver direkte ved hjælp af inversionslemmaet at:
Px|y =n
P−1x + Φ⊤
P−1v Φ
o−1 (3.174)Forstærkningen, κ, er ifølge sætning 3.22 givet ved:κ = PxΦ⊤(ΦPxΦ⊤ + Pv)−1 (3.175)der indsat i ovenstående udtryk for Px|y giver sætningens sidste opdatering af variansma-tri en. Den videre udregning er nemmest hvis der multipli eres med:
I = PvP−1v =
n
ΦPxΦ⊤ + Pv − ΦPxΦ⊤o
P−1v (3.176)d.v.s. at:
κ = PxΦ⊤(ΦPxΦ⊤ + Pv)−1n
ΦPxΦ⊤ + Pv − ΦPxΦ⊤o
P−1v
= PxΦ⊤n
I − (ΦPxΦ⊤ + Pv)−1ΦPxΦ⊤o
P−1v
=n
Px − PxΦ⊤(ΦPxΦ⊤ + Pv)−1ΦPx
o
Φ⊤P
−1v
= Px|yΦ⊤P
−1vHvis observationen y er en skalar størrelse, vil udtrykkene for den betingede fordeling redu- eres yderligere. Hvis y er en skalar, består Φ kun af en række. Lad os derfor i dette tilfældeindføre:
Φ = ϕ⊤ (3.177)Vi kan hermed skrive at:
mx|y = mx + κ(y − ϕ⊤mx)
κ =Pxϕ
1 + ϕ⊤Pxϕ= Px|yϕ
P−1x|y = P
−1x + ϕϕ
⊤hvor variansmatri erne Px og Px|y er normeret med variansen af v, der i dette tilfælde er enskalar størrelse.3.7 EstimationDer eksisterer adskillige metoder, hvorved man ud fra tilgængelige data kan estimere mereeller mindre ukendte størrelser. Vi skal i dette kapitel kort omtale nogle af de metoder, derdanner grundlag for vort senere arbejde med systemidentikation og tilstandsestimation.

154 3.7 EstimationLad de ukendte størrelser være elementer i vektoren θ og lad Y betegne en vektor (med Nelementer) indeholdende målinger. For at problemet har mening, må der være en relationmellem målingerne, d.v.s en relation mellem elementerne i Y og parametrene i θ.Eksempel: 3.19 I nedenstående gur er der afbildet 300 sammenhængende målinger af en ska-lar størrelse, yt, som funktion af xt. Det antages at målingen af xt er eksakt. Det vides på forhånd,at det er rimeligt at formode, at yt afhænger af xt på en kubisk måde. Det er følgelig rimeligt at
-6 -4 -2 0 2 4 6-6
-4
-2
0
2
4
6
8
10
y
xFigur 3.8. plot af yt vs xtantage, at der mellem målingen, yt, der er en stokastisk variabel, og den uafhængige variabel, xt,gælder følgende sammenhæng:yt = α + βxt + γx2
t + κx3t + et t = 1, ...,N (3.178)hvor et er fejlen, d.v.s. afvigelsen mellem måling og model. De ukendte størrelser i modellen erkoe ienterne α, β, γ og κ, der kan arrangeres i vektoren ,θ, hvor:
θ = (α, β, γ, κ)⊤ (3.179)Hvis målingerne arrangeres i vektoren Y , hvor:Y =
8
>
>
>
<
>
>
>
:
y1
y2...yN
9
>
>
>
=
>
>
>
;
(3.180)gælder der følgende relation8
>
>
>
<
>
>
>
:
y1
y2...yN
9
>
>
>
=
>
>
>
;
=
8
>
>
>
<
>
>
>
:
1 x1 x21 x3
11 x2 x2
2 x32... ... ... ...
1 xN x2N x3
N
9
>
>
>
=
>
>
>
;
8
>
>
<
>
>
:
αβγκ
9
>
>
=
>
>
;
+
8
>
>
>
<
>
>
>
:
ǫ1ǫ2...ǫN
9
>
>
>
=
>
>
>
;
(3.181)eller noget kortere:Y = Φθ + e (3.182)mellem de ukendte parametre i modellen og datavektoren. 2

155I eksempel 3.19 er sammenhængen mellem de ukendte parametre, i vektoren θ, og datavek-toren, Y , lineær. Vi vil i det følgende hovedsageligt betragte lineære modeller på formen:Y = Φθ + e (3.183)hvor vektorerne Y og θ har henholdsvis N og n elementer. Tilsvarende er Φ en N×n matrix.Vektoren e, der indeholder fejlen mellem model, Φθ, og måling, Y , består af N elementer.Den generelle lineære model, (3.183), indeholder, som angivet i eksempel 3.19, modellerbestående af N skalare målinger. Men den generelle lineære model indeholder f. eks. ogsåmodeller bestående af M målinger med hver m elementer, dvs. modeller på formen:
yt = ϕ⊤t θ + et t = 1, ...,M (3.184)hvor yt er en vektor med m elementer. Der er blot N = Mm elementer i Y . Modellen(3.184) er spe ielt interessant i forbindelse med skalare målinger, hvor m = 1. Bemærk, atvektoren Y er en stokastisk variabel. En estimator, θ, er en funktion af Y og er dermedogså en stokastisk variabel. Et estimat, d.v.s. udfaldet af θ, er tilsvarende en funktion afudfaldet af Y . Generelt er det ønskeligt, at estimatoren θ af θ har sådanne egenskaber atestimationsfejlen:
θ = θ − θ (3.185)for alle værdier af θ er så lille som mulig. Hvordan lille, i denne sammenhæng, hvor θ eren stokastisk variabel, skal opfattes, fører til denitionen af forskellige egenskaber. Det eren meget vigtig egenskab for en estimator, at estimatet i middel er lig den korrekte værdi,d.v.s. parametervektoren, θ. Mere præ ist har vi følgende denition.Denition: 3.3 En estimator siges at være entral, hvis der gælder at:E
n
θo
= 0 (3.186)for alle θ. 2Hvis estimatoren ikke er entral siges den at være biased. I forbindelse med vurdering afen estimators egenskaber er det imidlertid ikke kun middelværdien, der er af interesse, menogså dens variation omkring middelværdien. Vi angiver derfor følgende denition.Denition: 3.4 En estimator, θ, siges at være en uniform minimal middelkvadrats esti-mator (UMMS, Uniform Minimal Mean Square estimator) såfremtE
n
(θ − θ)(θ − θ)⊤|θo
≤ E
n
(θ − θ)(θ − θ)⊤|θo (3.187)overalt i θ. Her er θ en vilkårlig estimator. 2Bemærk, at middelkvadratafvigelsen er betinget parametervektoren og dermed er en funk-tion af denne. Bemærk ligeledes, at en UMMS estimator skal have minimal middelkvadra-tafvigelse for ethvert punkt i parameterrummet. Middelkvadratafvigelsen for estimatorenbestår dels af et bidrag fra middelværdiafvigelsen og dels af et bidrag fra variansen. Vi de-nerer derfor en minimalvarians estimator som følger.

156 3.7 EstimationDenition: 3.5 En estimator siges at være en uniform minimalvarians estimator såfremtVar
n
θ|θo
≤ Varn
θ|θo (3.188)overalt i θ og for enhver estimator θ. 2Ofte begrænses den betragtede klasse af estimatorer til entrale, lineære estimatorer. I dennesammenhæng har vi følgende denitioner.Denition: 3.6 En estimator siges at være en uniform minimalvarians, entral estima-tor (UMVU, Uniform Minimal Varian e Unbiased estimator) såfremt den er en uniformminimalvarians estimator i klassen af entrale estimatorer. 2Denition: 3.7 En estimator siges at være den bedste lineære, entrale estimator (BLUE,Best Linear Unbiased Estimator) hvis den dels er lineær og dels har uniform minimal variansi klassen af lineære, entrale estimatorer. 2Ved vurderinger af estimatorers varians er det interessant at kende et absolut mål hvortilvurderingen kan relateres. Et sådant mål er den nedre grænse for en estimators usikkerhed,der er givet ved Cramer-Rao grænsen.Sætning: 3.24 Lad f(Y |θ) betegne tæthedsfunktionen for Y betinget θ og antag at f(Y |θ)er regulær. Da gælder for enhver entral estimator θ at:
Varn
θ|θo
≥M−1 (3.189)hvor:
M = E
n
φφ⊤|θo og φ =
d
dθf(Y |θ) (3.190)
2Bevis: Overspringes. Se f.eks. (Goodwin & R. L. Payne 1977). 2Matri en, M , der ligesom Varn
θ|θo er en funktion af θ, betegnes som Fishers informations-matrix. Hvis variansen, Var
n
θ|θo, antager den nedre værdi, da siges estimatoren at væree ient.De nævnte egenskaber gælder for et fast antal, N , elementer i datavektoren, Y . Vi nævnernu en egenskab som vedrører asymptotiske forhold, dvs. forhold for N → ∞.Denition: 3.8 En estimator siges at være svagt konsistent, såfremt der for følgen afestimatorer gælder at:
Pn
|θ − θ| > ǫo
→ 0 for N → ∞ (3.191)2Bemærkning: Som det vil fremgå af et senere kapitel 4.6 om konvergens af stokastiske pro- esser svarer svag konsistens til at θ → θ i sandsynlighed. Hvis θ → θ for N → ∞ medsandsynligheden 1 siges estimatoren at være (stærk) konsistent.

3.7.1 LS-estimation 1573.7.1 LS-estimationDen første metode vi vil beskæftige os med, er mindste kvadraters metoder, der i det følgendevil blive betegnet LS-metoden (Least Squares method). Denne metode er ret gammel ogder refereres normalt til Gauss (1809), som dens opnder. Gauss anvendte metoden tilbestemmelse af planetbaner.Antag, at vi har en række observationer der er arrangeret i vektoren Y og antag at dereksisterer følgende relation mellem datavektoren, Y , og parametervektoren, θ:Y = G(θ) + e (3.192)Denne model kan også udskrives elementvis på formen:
yt = g(t, θ) + et for t = 1, ..., N (3.193)Den sidste form er spe ielt interessant, når målingerne er skalare.Vi ønsker nu at nde den værdi for θ, d.v.s. LS-estimatoren θ , der minimerer (kvadratetpå) afstanden mellem model og måling. Vi indfører derfor residualvektoren,ǫ = Y −G(θ) eller residualerne ǫt = yt − g(t, θ) (3.194)hvorved vi har følgende denition.Denition: 3.9 LS-estimatoren, θ, er deneret som minimumspunktet til kvadratsum-men:
JN (θ) =1
2
NX
t=1
ǫ2t =
1
2ǫ⊤ǫ (3.195)
2I det følgende vil vi beskæftige os med problemer, hvor G (og dermed også g) er en lineærfunktion i θ, d.v.s. at:Y = Φθ + e (3.196)eller at:
yt = ϕ⊤t θ + et t = 1, ..., N (3.197)LS-estimatoren er givet i sætning 3.25.Sætning: 3.25 Mindste kvadraters estimatoren (LS-estimatoren) for θ i modellen (3.196) er,under forudsætning af at Φ⊤Φ er inverterbar, givet ved:
θ =“
Φ⊤Φ”−1
Φ⊤Y (3.198)
2
158 3.7 EstimationBevis: Vi har direkte, at:JN =
1
2(Y − Φθ)⊤(Y − Φθ)
=1
2
ˆ
Y ⊤ θ⊤˜
»
I −Φ
−Φ⊤ Φ⊤Φ
– »
Y
θ
–der ifølge D.2, appendix D, har minimum for:θ =
“
Φ⊤Φ”−1
Φ⊤Y (3.199)
2Bemærk, at matri en, Φ⊤Φ, har dimensionen n × n, hvor n er antallet af elementer i θ.Bemærk, idet:Φ =
8
>
>
>
<
>
>
>
:
... ϕ⊤1 ...
... ϕ⊤2 ...... ... ...
... ϕ⊤N ...
9
>
>
>
=
>
>
>
;
Φ⊤ =
8
>
>
<
>
>
:
... ... ... ...ϕ1 ϕ1 ϕ1... ... ... ... 9
>
>
=
>
>
;
(3.200)at for det skalare tilfælde kan estimatoren 3.198 skrives som:θ =
(
NX
t=1
ϕtϕ⊤t
)−1 NX
t=1
ϕtyt (3.201)Hvis ΦΦ⊤ ikke er inverterbar er minimum til kriteriet 3.195 ikke unikt, d.v.s. der eksistereren familie af estimatorer, der minimerer kriteriet. Disse estimatorer er under alle omstæn-digheder løsninger til normalligningen:Φ⊤Φθ = Φ⊤
Y (3.202)Eksempel: 3.20 Betragt forholdene fra eksempel 3.19. Her er:θ = (α, β, γ, κ)⊤ (3.203)og:
ϕt = (1, xt, x2t , x3
t )⊤ (3.204)Videre er:ΦΦ⊤ =
NX
t=1
ϕtϕ⊤t =
NX
t=1
8
>
>
<
>
>
:
1xt
x2t
x3t
9
>
>
=
>
>
;
`
1, xt, x2t , x3
t
´
=
8
>
>
<
>
>
:
NP
xtP
x2t
P
x3t
P
xt
P
x2t
P
x3t
P
x4t
P
x2t
P
x3t
P
x4t
P
x5t
P
x3t
P
x4t
P
x5t
P
x6t
9
>
>
=
>
>
;
2

3.7.2 Egenskaber for LS-estimatoren 159Vi kan give problemet en geometrisk fortolkning ved at betragte 3.195. Vi bemærker først,at:Y = Φθ (3.205)udspænder et n-dimensionalt underrum i R
N (under forudsætning af at Φ har fuld rang,d.v.s. n). Dette underrum er udspændt af søjlerne i Φ. Størrelsen, J , i 3.195 er kvadratetpå afstanden mellem et punkt, Y , i underrummet og datapunktet, Y . For LS-estimatet, θ,gælder der at fejlvektoren, ǫ = Y − Y , er vinkelret på (eller er normal til) underrummet,der er udspændt af søjlerne i Φ. Dette følger umiddelbart af ligning 3.202:Φ⊤Φθ − Φ⊤
Y = 0 (3.206)eller:Φ⊤(Y − Y ) = 0 (3.207)Dette er en forklaring på, hvorfor (3.202) betegnes som normalligningen.3.7.2 Egenskaber for LS-estimatorenVi vil nu beskæftige os med nogle egenskaber for LS-estimatoren. Det bemærkes først atLS-estimatoren er en lineær estimator, d.v.s. er en lineær funktion af Y .Det antages dernæst, at datavektoren, Y , er genereret af følgende lineære system:S Y = Φθ0 + e (3.208)hvor:
e ∈ F (0, P ) (3.209)Vi har følgende sætning.Sætning: 3.26 Betragt LS-estimatoren (3.198) for den ukendte parametervektor, θ, i 3.196.Der gælder at:θ = F
“
θ0, (Φ⊤Φ)−1Φ⊤
PΦ(Φ⊤Φ)−1” (3.210)
2Bevis: Vi har direkte ved indsættelse at:θ =
“
Φ⊤Φ”−1
Φ⊤Y =
“
Φ⊤Φ”−1
Φ⊤ Φθ0 + e
= θ0 +“
Φ⊤Φ”−1
Φ⊤eog sætningen følger da af sætning 3.5. 2Bemærk, at det af sætning 3.26 fremgår at LS-estimatoren er entral. Lad os herefter be-tragte spe ialtilfældet:
P = σ2I (3.211)

160 3.7 Estimationdvs. at alle elementerne i fejlvektoren, e, er indbyrdes ukorrelerede og har samme varians,σ2. Vi siger at der i dette tilfælde hersker varianshomogenitet. Vi har følgende sætning.Sætning: 3.27 Betragt LS-estimatoren (3.198) for den ukendte parametervektor, θ, i (3.208)og (3.209). Når fejlvektorens elementer er ukorrelerede og har samme varians, gælder der at:
θ = F
“
θ0, (Φ⊤Φ)−1
σ2” (3.212)
Varn
θo
≤ Varn
θo (3.213)hvor θ er en vilkårlig entral, lineær estimator. 2Bevis: Sætningens første del er en simpel følge af sætning 3.26. Betragt en vilkårlig lineærestimator θ, givet ved:
θ = LY (3.214)hvor L er en n×N matrix. Da θ yderligere er entral gælder der at:E
n
θo
= θ0 (3.215)Da nu:E
n
θo
= E
n
LYo
= LΦθ0 (3.216)skal der gælde at LΦ = I . Videre gælder at:Var
n
θo
= Varn
L(Φθ0 + e)o
= LL⊤σ
2 (3.217)Til bevisets sidste del denerer vi en matrix, D, ved:D = L− (Φ⊤Φ)−1Φ⊤ (3.218)og danner en positiv semidenit matrix:
DD⊤ = L− (Φ⊤Φ)−1Φ⊤L⊤ − Φ(Φ⊤Φ)−1
= LL⊤ − LΦ(Φ⊤Φ)−1 − (Φ⊤Φ)−1Φ⊤
L⊤
+(Φ⊤Φ)−1 ≥ 0Anvender vi LΦ = I har vi at:DD
⊤ = LL⊤ − (Φ⊤Φ)−1 ≥ 0 (3.219)Dermed er Var
n
θo
≥ Varn
θo og sætningen bevist. 2Bemærk, at sætning 3.27 siger, at LS-estimatoren er BLUE under varianshomogenitet (jvf.denition 3.7).

3.7.2 Egenskaber for LS-estimatoren 161Sætning: 3.28 Antag at forudsætningerne til sætning 3.27 er gældende. Da gælder der atresidualvektoren:ǫ = Y − Φθ (3.220)er ukorreleret med LS-estimatet, θ. 2Bevis: Først udregnes sammenhængen mellem residualvektoren, ǫ, og fejlvektoren.
ǫ = Y − Φθ = Y − Φ(Φ⊤Φ)−1Φ⊤Y
= (Φθ0 + e) − Φ(Φ⊤Φ)−1Φ⊤(Φθ0 + e)= e− Φ(Φ⊤Φ)−1Φ⊤
e
=n
IN − Φ(Φ⊤Φ)−1Φ⊤o
eDernæst udregnes kovariansfunktionen:Rθ,ǫ = E
n
(θ − θ0)ǫ⊤o
= E
n
[(Φ⊤Φ)−1Φ⊤e][e⊤IN − Φ(Φ⊤Φ)−1Φ⊤]
o
= [(Φ⊤Φ)−1Φ⊤]σ2IN [IN − Φ(Φ⊤Φ)−1Φ⊤]
= σ2h
(Φ⊤Φ)−1Φ⊤] − Φ(Φ⊤Φ)−1Φ⊤i
= 0
2I udtrykket for LS-estimatorens varians i sætning 3.27 indgår σ2. Vi anfører derfor følgendesætning.Sætning: 3.29 Antag, at forudsætningerne for sætning 3.27 er gældende. Da gælder, at:s2 =
2J(θ)
N − n(3.221)(hvor J er givet i (3.195)) er et entralt estimat for σ2 i 3.211. 2Bevis: Der gælder, at:
2J(θ) = ǫǫ⊤
= e⊤IN − Φ(Φ⊤Φ)−1Φ⊤IN − Φ(Φ⊤Φ)−1Φ⊤e
= e⊤IN − Φ(Φ⊤Φ)−1Φ⊤eog videre at:
2J(θ) = tre⊤IN − Φ(Φ⊤Φ)−1Φ⊤e= trIN − Φ(Φ⊤Φ)−1Φ⊤ee⊤

162 3.7 Estimationidet der jvf. appendix C er anvendt at tr(AB) = tr(BA). Dermed er:E
n
2J(θ)o
= σ2trIN − Φ(Φ⊤Φ)−1Φ⊤
= σ2N − trΦ(Φ⊤Φ)−1Φ⊤
= σ2N − tr(Φ⊤Φ)−1Φ⊤Φ
= σ2(N − n)og dermed er s2 et entralt skøn for σ2. 2Antag nu i det følgende, at fejlvektoren e er normalfordelt, d.v.s. at:
e ∈ N(0, Re) (3.222)Da gælder følgende sætning.Sætning: 3.30 Under forudsætningen, (3.222), gælder der om LS-estimatoren, 3.198, for θi 3.196 at:θ ∈ N(θ0, (Φ
⊤Φ)−1Φ⊤ReΦ(Φ⊤Φ)−1) (3.223)Når der er varianshomogenitet, d.v.s. når Re = σ2I , gælder der at:
• θ ∈ N(θ0, σ2(Φ⊤Φ)−1)
• θ er e ient• ǫ og θ er uafhængige.• 2J(θ)
σ2 ∈ χ2(N − n)
• estimatoren, s2, er en MVUE for σ2
2Bevis: Punkt 1 er en simpel følge af sætning 3.26 og af at θ er en lineær estimator.Vedrørende estimatoren e iens har vi at:f(Y |θ) =
1p
(2πσ2)Nexp−1
2(Y − Φθ)⊤
1
σ2(Y − Φθ) (3.224)og dermed at:
φ =d
dθlog(f(Y |θ))
=d
dθ
−N2log(2πσ2) − 1
2(Y − Φθ)⊤
1
σ2(Y − Φθ)
ff
= Φ⊤ Y − Φ⊤θ
σ2=
Φ⊤e
σ2

163Endelig er Fishers informationsmatrix:M = E
n
φφ⊤|θo
= E
nΦ⊤ee⊤Φ
σ4|θo
=Φ⊤Φ
σ2(3.225)hvoraf vi ser at Var
n
θ|θo præ is antager Cramer-Rao grænsen. Idet ǫ er en lineær funktionaf Y er ǫ normalfordelt og idet ǫ er ukorreleret med θ er punkt 3 bevist. Beviset for sætningenspunkt 4 og 5 overlades til læseren. 23.8 ML-Estimation.Som nævnt under den tidligere behandling af estimationsproblemet er LS-estimatorerneikke baseret på en antagelse om en bestemt fordelingstype. Vi vil nu i dette afsnit betragtemaksimum likelihood estimatorer (ML-estimatorer), der netop (og i modsætning til LS-estimatorer) er baseret på en fordelingsantagelse. I dette afsnit vil vi spe ielt undersøgeML-estimation af parametre i lineære gaussiske modeller.Lad som tidligere f(Y |θ) betegne den betingede tæthedsfunktion for datavektoren Y .Denition: 3.10 Maximum likelihood (ML) estimatoren for θ er deneret ved at:
f(Y |θ) ≥ f(Y |θ) (3.226)hvor θ er en vilkårlig funktion af Y . 2Hvis Y betegner udfaldet af Y , er likelihood funktionen, L, deneret ved:L(θ) = f(Y |θ) (3.227)ML-estimatet af θ er da givet som maksimumspunktet til L. Idet den naturlige logaritme eren strengt monoton funktion kan ML-estimatet også ndes som minimum til:
l(θ) = −logf(Y |θ) (3.228)eller formuleret anderledesθ = argmin
θ(−logf(Y |θ)) (3.229)Det har den umiddelbare fordel at det er nemt at indse relationen mellem LS-estimatorenog ML-estimatoren for normalfordelingstilfældet. Lad os igen vende tilbage til den lineæremodel, 3.183, og antag at fejlen er normalfordelt, d.v.s antag at:
Y = Φθ + e (3.230)og at:e ∈ N(0, Re) (3.231)Antag desuden at Re er positiv denit. ML-estimatoren er givet i følgende sætning.

164 3.8 ML-Estimation.Sætning: 3.31 Hvis Re er kendt er ML-estimatoren for θ i 3.230 og 3.231 er under forud-sætning af at Φ⊤R−1e Φ er inverterbar, givet ved:
θ =n
Φ⊤R
−1e Φ
o−1
Φ⊤R
−1e Y (3.232)
2Bevis: Direkte udregninger giver, at når:f(Y |θ) =
1p
Det(Re)√
2πN
exp
−1
2(Y − Φθ)⊤R−1
e (Y − Φθ)
ff (3.233)er:J = −logf(Y |θ)
=1
2log(Det(Re)) +
N
2log(2π)
+1
2(Y − Φθ)⊤R−1
e (Y − Φθ)der ifølge lemma D.1, appendix D kan skrives som:J =
1
2log(Det(Re)) +
N
2log(2π)
+1
2
`
Y ⊤ θ⊤´
R−1e −R−1
e Φ
−Φ⊤R−1e Φ⊤R−1
e Φ
ff„
Y
θ
«Ifølge lemma D.2, appendix D har ovenstående optimum for:θ =
n
Φ⊤R
−1e Φ
o−1
Φ⊤R
−1e Y (3.234)
2Bemærk, at i modsætning til LS-estimatoren kræver denne estimator et kendskab til va-riansstrukturen. Bemærk samtidig, at ML-estimatoren ikke kræver kendskab til variansensabsolutte størrelse, men kun til variansstrukturen, d.v.s. til matri en Σ, hvor:Re = Σσ2 (3.235)og hvor σ2 er en skalar. Til estimation af σ2 har vi følgende sætning.Sætning: 3.32 ML-estimatoren for σ2 er givet ved:
s2 =
1
N(Y − Φθ)⊤(Y − Φθ) =
ǫ⊤ǫ
N(3.236)hvor ML-estimatoren af θ, er givet:
θ =n
Φ⊤Σ−1Φo−1
Φ⊤Σ−1Y (3.237)
2

165Bevis: Overspringes. Se f.eks. (Conradsen 1979b). 2Lad os nu spe ialisere til tilfældet, hvor Re er en diagonalmatrix,Re =
8
>
>
>
<
>
>
>
:
σ21 0 ... 00 σ2
2 ... 0... ... . . . ...0 0 ... σ2
N
9
>
>
>
=
>
>
>
;
(3.238)Elementerne i fejlvektoren, e, er uafhængige (idet fejlvektoren, e, er normalfordelt). ML-estimatoren kan i dette tilfælde skrives som:θ =
(
NX
t=1
ϕtϕ⊤t
σ2t
)−1 NX
t=1
ϕtyt
σ2t
(3.239)hvor ϕ1, ϕ2, ..., ϕN er rækkerne i Φ- matri en. Bemærk, hvorledes målingerne vægtes ind iestimatet i forhold til deres usikkerhed. Hvis variansstrukturen er homogen, dvs. hvis:Re = σ
2IN (3.240)er LS- og ML-estimatorerne sammenfaldende. Vi har sætning 3.33.Sætning: 3.33 Antag, at Re = σ2I . Da har ML-estimatoren 3.232 for θ i 3.230 og 3.231følgende egenskaber:
• θ ∈ N(θ0, σ2(Φ⊤Φ)−1)
• θ er e ient• ǫ = Y − Φθ og θ er uafhængige.• ǫ⊤ǫ
σ2 ∈ χ2(N − n)
2Lad os slutte dette afsnit med at behandle problemet omkring ukendt dimension af θ, dvs.strukturbestemmelse. En egentlig behandling af emnet modelvalidering ndes i det senerekapitel under Systemidentikation.Antag, at datavektoren Y er genereret af systemet:S Y = Φ0θ0 + e0 e0 ∈ N(0, σ2
0IN) (3.241)hvor dimensionen af θ0 er n0, samt at vi estimerer parametre i modellerne:M Y = Φiθi + ei (3.242)hvor dimensionen af θi er ni. Det er rimelig plausibelt, at det ikke vil have en synderligstor eekt på tabsfunktionen (kvadratsumsafvigelsen), hvis vi øger antallet af parametre i
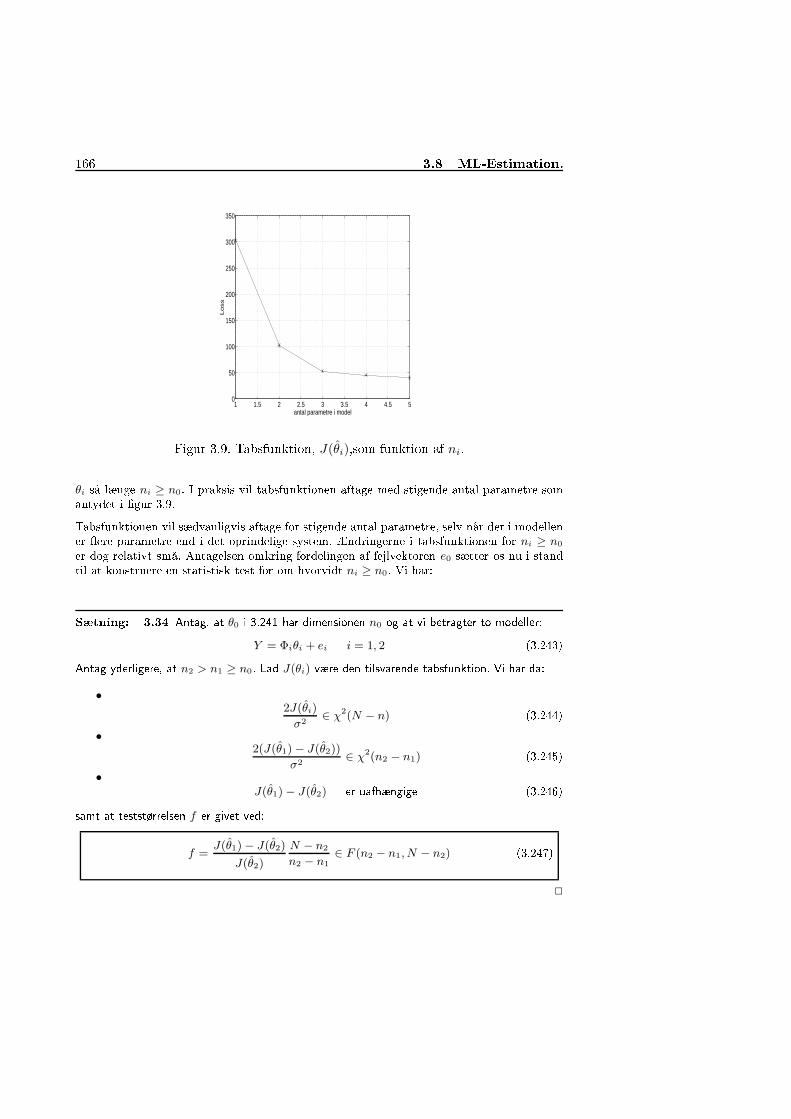
166 3.8 ML-Estimation.
1 1.5 2 2.5 3 3.5 4 4.5 50
50
100
150
200
250
300
350L
oss
antal parametre i modelFigur 3.9. Tabsfunktion, J(θi),som funktion af ni.θi så længe ni ≥ n0. I praksis vil tabsfunktionen aftage med stigende antal parametre somantydet i gur 3.9.Tabsfunktionen vil sædvanligvis aftage for stigende antal parametre, selv når der i modellener ere parametre end i det oprindelige system. Ændringerne i tabsfunktionen for ni ≥ n0er dog relativt små. Antagelsen omkring fordelingen af fejlvektoren e0 sætter os nu i standtil at konstruere en statistisk test for om hvorvidt ni ≥ n0. Vi har:Sætning: 3.34 Antag, at θ0 i 3.241 har dimensionen n0 og at vi betragter to modeller:
Y = Φiθi + ei i = 1, 2 (3.243)Antag yderligere, at n2 > n1 ≥ n0. Lad J(θi) være den tilsvarende tabsfunktion. Vi har da:•
2J(θi)
σ2∈ χ
2(N − n) (3.244)•
2(J(θ1) − J(θ2))
σ2∈ χ
2(n2 − n1) (3.245)•
J(θ1) − J(θ2) er uafhængige (3.246)samt at teststørrelsen f er givet ved:f =
J(θ1) − J(θ2)
J(θ2)
N − n2
n2 − n1∈ F (n2 − n1, N − n2) (3.247)
2

167Bevis: Overspringes. Se (Conradsen 1979b). 2Bemærk, at spe ielt sætningens sidste punkt kan bruges til at estimere ordenen af modellenud fra tabsfunktionens udseende.3.9 Bayes EstimationI de tidligere afsnit har vi betragtet estimatorer for parametre, der var at betragte somkonstante deterministiske størrelser. I dette afsnit vil vi behandle estimatorer, der tagerudgangspunkt i, at parametrene kan være stokastiske variable. Det vil sige at vi nu vilbetragte problemet ud fra den antagelse, at både Y og θ er stokastiske variable. Hvis dereksisterer en korrelation mellem Y og θ, da vil et kendskab til udfaldet af Y give informationom θ.Givet udfaldet af Y , der indeholder al tilgængelig information, ønsker vi nu at bestemme enestimator således at fejlen mellem estimat og parameter er så lille som mulig. Imidlertid erbåde parametre og data stokastiske variable. Et passende mål for estimationsfejlens størrelseer middelværdien af kvadratet på afstanden mellem parametre og estimator.Denition: 3.11 En estimator siges at være en minimal (a'priori) middelkvadrat esti-mator, såfremt den minimerer kriteriet:J = E
n
|θ − θ|2o (3.248)
2Bemærk, at der i dette kriterium er midlet både over Y og θ og ikke som i denition 3.4hvor der kun er midlet m.h.t. Y . Til bestemmelse af estimatoren har vi følgende sætning.Sætning: 3.35 Den estimator, θ(Y ), der minimerer middelkvadratafvigelsen:J = E
n
|θ − θ|2o (3.249)er givet ved den betingede forventningsværdi, d.v.s. at:
θ(Y ) = E
n
θ|Yo (3.250)
2Bevis: Lad x(Y ) være en vilkårlig estimator. Vi udregner direkte at:J = E
n
(θ − x(Y ))⊤(θ − x(Y ))o
= EY En
(θ − x(Y ))⊤(θ − x(Y ))|Yo

168 3.9 Bayes Estimationhvor vi har udnyttet sætning 3.14. Vi skal minimere J med hensyn til alle estimatorer, x(Y ).Dette er ækvivalent med at minimere:E
n
(θ − x(T ))⊤(θ − x(T ))|Yo (3.251)Indfør nu:
θ = Eθ|Y (3.252)Dermed er:I = E
n
(θ − θ + θ − x(T ))⊤(θ − θ + θ − x(T ))|Yo
= E
n
(θ − θ)⊤(θ − θ)|Yo
− 2En
(θ − θ)⊤(θ − x(T ))|Yo
+E
n
(θ − x(T ))⊤(θ − x(T ))|Yo
= E
n
(θ − θ)⊤(θ − θ)|Yo
+ E
n
(θ − x(T ))⊤(θ − x(T ))|Yoidet:
E
n
(θ − θ)⊤(θ − x(T ))|Yo
= E
n
(θ − θ)⊤|Yo
(θ − x(T )) = 0 (3.253)Størrelsen I kan derfor minimeres ved at sætte sidste led til nul eller:x(Y ) = θ = E
n
θ|Yo (3.254)
2Ovenstående estimationsproblem er et spe ialtilfælde af Bayesiansk estimation, hvor pro-blemet er at nde en estimator, der minimerer den forventede risiko,Jb = E
n
L(θ − θ)o (3.255)Det kan vises, at den betingede forventningsværdi er den optimale løsning til en langt størreklasse af kriterier end 3.248. Det kan vises, at så længe kriteriefunktionen, L, er symmetriskog konveks og så længe at den betingede tæthedsfunktion af θ (betinget Y ) er symmetriskom dens middelværdi, da er den betingede forventningsværdi den optimale løsning.Antag nu, at a'priori fordelingen af θ er givet ved tæthedfuntionen fθ(x), og at relationenmellem målinger og parametre er givet ved den betingede tæthedsfunktion, fY |θ(y|θ). Dakan vi ved hjælp af Bayes sætning (sætning 3.13) nde tætheden af θ betinget Y og dermedden betingede forventningsværdi. Hvis de indgående fordelinger er gaussiske, da er problemetallerede løst i sætning 3.22. Vi resumeer her.Sætning: 3.36 Antag, at:
θ ∈ N(m0, P0) (3.256)og at:Y = Φθ + e (3.257)hvore ∈ N(0, Re) (3.258)
169Da gælder at:θ|Y ∈ N(θ, P ) (3.259)hvor:
θ = m0 + κ(Y − Φm0)κ = PΦ⊤
R−1e = P0Φ
⊤(ΦP0Φ⊤ +Re)
−1
P−1 = P
−10 + Φ⊤
R−1e Φ P = (I − κΦ)P0For estimationsfejlen, θ, der er uafhængig af Y , gælder der at:
θ ∈ N(0, P ) (3.260)2Bevis: Sætningens første del fremkommer blot ved indsættelse i sætning 3.22 og 3.24.Estimationsfejlen, θ, er normalfordelt idet θ er en lineær operation på normalfordelte data.For middelværdien har vi at:
E
n
θ|Yo
= 0 (3.261)og at:E
n
θ|Yo
= E
n
θo (3.262)idet θ og Y er uafhængige (j.v.f. sætning 3.22). Videre gælder der at:
P = Varn
θ|Yo
= Varn
(θ − θ)|Yo
= Varn
θo (3.263)
2Bemærk, at der i sætning 3.36 er angivet den ubetingede fordeling af θ. Bemærk ligeledes,at ovenstående estimator er identisk med ML-estimatoren for m0 = 0 og P0 → ∞, hvilketsvarer til en a'priori informationen med præ isionen nul. (sammenlign med 3.232 og 3.239).I opdateringen, 3.260, fremgår det tydeligt, hvorledes den indkomne information, udtryktved Φ⊤R−1e Φ adderes til præ isionen, P−1
0 , af a'priori estimatet.I det generelle tilfælde, hvor de indgående fordelinger ikke nødvendigvis er gaussiske, kan detvære relativt besværligt at anvende Bayes sætning (sætning 3.13) til at nde den optimaleestimator. Hvis vi begrænser klassen af estimatorer til de lineære estimatorer, nder vi etresultat der svarer til ovenstående sætning. For fuldstændighedens skyld angiver vi følgendesætning, dog uden bevis.Sætning: 3.37 Antag at:θ ∈ F(m0, P0) (3.264)og at:Y = Φθ + e (3.265)hvore ∈ F(0, Re) (3.266)
170 3.9 Bayes EstimationDa gælder at den lineære minimalkvadrats estimator θl er givet ved:θl = m0 + κ(Y − Φm0)κ = PΦ⊤
R−1e = P0Φ
⊤(ΦP0Φ⊤ +Re)
−1
P−1 = P
−10 + Φ⊤
R−1e Φ P = (I − κΦ)P0For estimationsfejlen, θ, der er ukorreleret med Y , gælder der at:
θ ∈ F(0, P ) (3.267)2
Del IIDel 2: Stokastiske systemer ogregulering
171

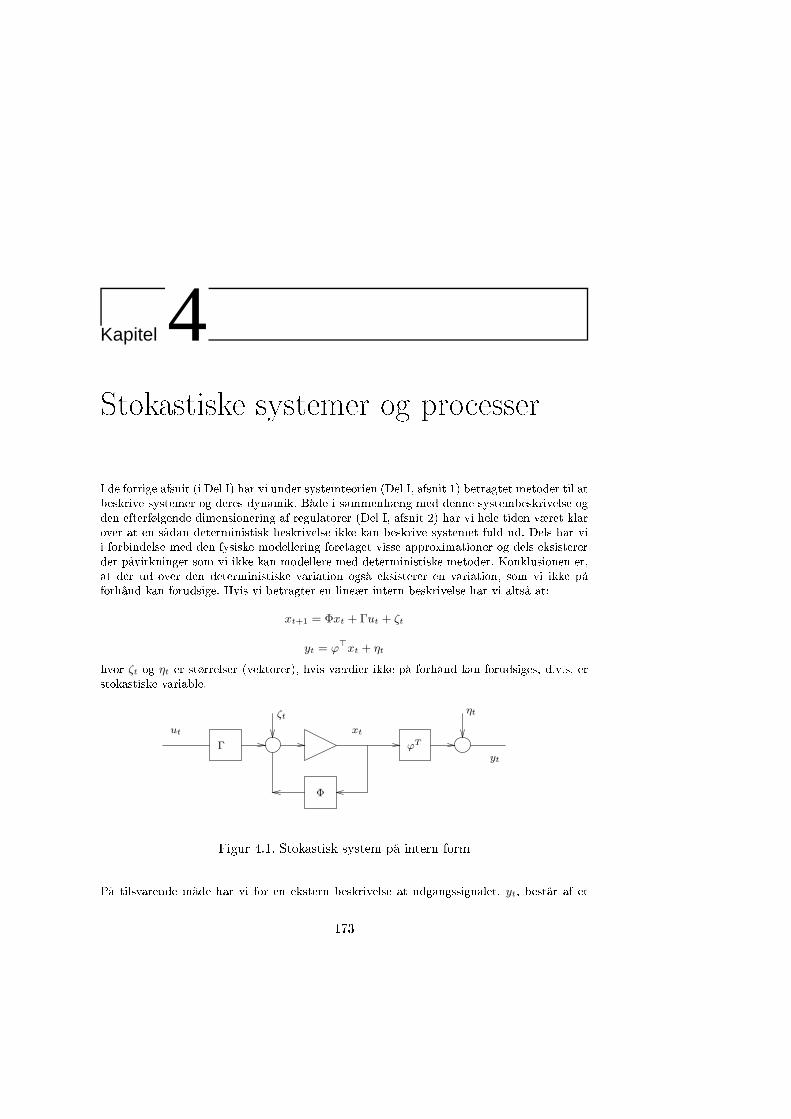
Kapitel 4Stokastiske systemer og pro esserI de forrige afsnit (i Del I) har vi under systemteorien (Del I, afsnit 1) betragtet metoder til atbeskrive systemer og deres dynamik. Både i sammenhæng med denne systembeskrivelse ogden efterfølgende dimensionering af regulatorer (Del I, afsnit 2) har vi hele tiden været klarover at en sådan deterministisk beskrivelse ikke kan beskrive systemet fuld ud. Dels har vii forbindelse med den fysiske modellering foretaget visse approximationer og dels eksistererder påvirkninger som vi ikke kan modellere med deterministiske metoder. Konklusionen er,at der ud over den deterministiske variation også eksisterer en variation, som vi ikke påforhånd kan forudsige. Hvis vi betragter en lineær intern beskrivelse har vi altså at:xt+1 = Φxt + Γut + ζt
yt = ϕ⊤xt + ηthvor ζt og ηt er størrelser (vektorer), hvis værdier ikke på forhånd kan forudsiges, d.v.s. erstokastiske variable.
ηt
ut
Γ
ζt
Φ
xt
ϕT
yt
Figur 4.1. Stokastisk system på intern formPå tilsvarende måde har vi for en ekstern beskrivelse at udgangssignalet, yt, består af et173
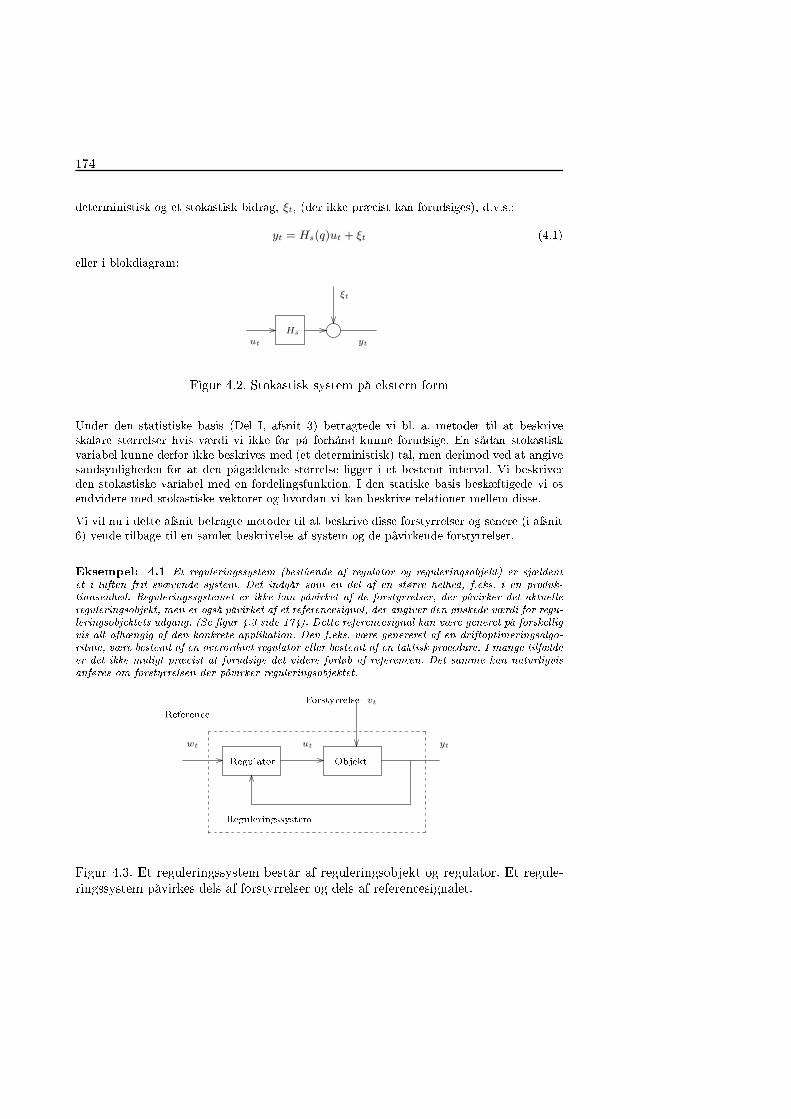
174deterministisk og et stokastisk bidrag, ξt, (der ikke præ ist kan forudsiges), d.v.s.:yt = Hs(q)ut + ξt (4.1)eller i blokdiagram:
Hs
ut
ξt
ytFigur 4.2. Stokastisk system på ekstern formUnder den statistiske basis (Del I, afsnit 3) betragtede vi bl. a. metoder til at beskriveskalare størrelser hvis værdi vi ikke for på forhånd kunne forudsige. En sådan stokastiskvariabel kunne derfor ikke beskrives med (et deterministisk) tal, men derimod ved at angivesandsynligheden for at den pågældende størrelse ligger i et bestemt interval. Vi beskriverden stokastiske variabel med en fordelingsfunktion. I den statiske basis beskæftigede vi osendvidere med stokastiske vektorer og hvordan vi kan beskrive relationer mellem disse.Vi vil nu i dette afsnit betragte metoder til at beskrive disse forstyrrelser og senere (i afsnit6) vende tilbage til en samlet beskrivelse af system og de påvirkende forstyrrelser.Eksempel: 4.1 Et reguleringssystem (bestående af regulator og reguleringsobjekt) er sjældentet i luften frit svævende system. Det indgår som en del af en større helhed, f.eks. i en produk-tionsenhed. Reguleringssystemet er ikke kun påvirket af de forstyrrelser, der påvirker det aktuellereguleringsobjekt, men er også påvirket af et referen esignal, der angiver den ønskede værdi for regu-leringsobjektets udgang. (Se gur 4.3 side 174). Dette referen esignal kan være generet på forskelligvis alt afhængig af den konkrete applikation. Den f.eks. være genereret af en driftoptimeringsalgo-ritme, være bestemt af en overordnet regulator eller bestemt af en taktisk pro edure. I mange tilfældeer det ikke muligt præ ist at forudsige det videre forløb af referen en. Det samme kan naturligvisanføres om forstyrrelsen der påvirker reguleringsobjektet.Referen eReguleringssystemwt ytObjektvtForstyrrelse
utRegulatorFigur 4.3. Et reguleringssystem består af reguleringsobjekt og regulator. Et regule-ringssystem påvirkes dels af forstyrrelser og dels af referen esignalet.

175I gur 4.4 er en realisation af et referen esignal angivet. Realisationen kunne imidlertid også væreen forstyrrelse. Bemærk, at signalet, der kan karakteriseres som en stokastisk trinfunktion, normalter konstant, men til tilfældige tidspunkter foretager spring af en tilfældig størrelse. Vi vil senere (iafsnit 5) opstille en stokastisk model for denne udvikling. 2
0 10 20 30 40 50 60 70 80 90 100−0.5
0
0.5
1
1.5
2
x
t
Stokastisk trinfunktion
Figur 4.4. Realisation af en stokastisk trinfunktion.Eksempel: 4.2 I eksempel 4.1 betragtede vi forhold omkring en stokastisk pro es (f.eks. en re-feren e), der udviklede sig i trin. Fly, skibe og automobiler (der er eksempler på bevægelser i 3,2 og i 1 dimension, henholdvis) vil ofte have en bevægelse, der (med en rimelig approximation)kan karakteriseres ved en hastighed, der udvikles i trin. Dette svarer til at positionen udvikles somrampefunktioner (eller er stykvist lineære). I gur 4.5 [side 175 er en realisation af et sådant signalangivet.0 10 20 30 40 50 60 70 80 90 100
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
x
t
Stokastisk rampefunktion
Figur 4.5. Realisation af en referen e der udvikler sig som en stokastisk rampefunk-tion. (Samme realisation som i gur 4.5 [side 175 men med en anden akseinddeling).2Som angivet under det indledende eksempel 4.1 [side 175 påvirkes et reguleringssystem (dvs.reguleringsobjekt styret af regulator) af to typer påvirkninger:

176 4.1 Stokastiske Pro esser• Forstyrrelse, hvis eekt ønskes redu eret• Referen e, der angive den ønskede værdi for systemudgangenDer eksister design teknikker, hvor problemet transformeres, således at kun en type påvirk-ning skal inddrages. Disse påvirkninger kan være mere eller mindre kendte. Man kan opdelei:• Deterministiske• Stokastiske, men målbare.• Stokastiske og ikke målbare.At påvirkningerne er deterministiske betyder at deres tidligere, nuværende og fremtidigeværdier er kendte. Dette kan være tilfældet for en referen e og i sjældnere tilfælde for enforstyrrelse. En påvirkning er stokastisk, hvis den værdi på forhånd ikke kendes præ ist.At den er målbar betyder at den nuværende og tidligere værdier kendes. Dette er normaltilfældet for en referen e. I visse tilfælde pla eres en sensor således at en forstyrrelse ermålbar, men normalt er det kun eekten på udgangen, der kan registreres. I såfald sigesforstyrrelsen at være ikke målbar.4.1 Stokastiske Pro esserI dette kapitel vil vi fokusere på, hvordan vi kan modellere disse stokastiske bidrag ellerforstyrrelser. Vi vil indledningsvis betragte stokastiske pro esser generelt og derefter spe- ialisere til de pro esser, der er relevante i forhold til vores anvendelser. I forbindelse medreguleringsteknik har den uafhængige variable (d.v.s. t) en tolkning som tiden. I dette ka-pitel vil denne variabel, t, være normeret med samplingperioden Ts, således at t antagerheltallige værdier. Dette skyldes at vi baserer fremstillingen på tidsdiskrete systemer. Nårder i eksempler refereres resultater gældende for tidskontinuerte systemer er t naturligviskontinuert. Vi indleder med at betragte et eksempel på en stokastisk pro es.Eksempel: 4.3 Antag, at t angiver tidspunktet i sampleenheder. Om en pro es gælder der, atfor en enhver værdi af t er et normalfordelt, d.v.s. at:
et ∈ N(0, σ2) (4.2)Endvidere er pro essen karakteriseret ved, at et og es er stokastisk uafhængige, hvis s og t erforskellige. Man kan verbalt sige, at pro essen er en sekvens af normal fordelte stokastiske variable,der er indbyrdes uafhængige. Vi skriver derfor:et ∈ Niid(0, σ2) (4.3)(hvor iid angiver independent identi ally distributed). Denne pro es tilhører klassen af pro esser,der kaldes normalfordelt hvid støj og er som det vil fremgå af det følgende en uhyre vigtig pro es.
2Efter dette lille indledende eksempel kan vi nu gå over til at give en mere formel denitionaf en stokastisk pro es.

177Denition: 4.1 En stokastisk pro es, xt(ω), t ∈ T, ω ∈ Ω, er en sekvens af stokastiskevariable. 2
T angiver indexmængden og kan f.eks. være:T = ...− 1, 0, 1, ... (4.4)eller
T = 0, 1, ... (4.5)ellerT = 0, 1, ..., N,N − 1 (4.6)I vores anvendelser, hvor t fortolkes som tidspunktet (normeret med Ts) består indexmæng-den af det tidsinterval (eventuelt ubegrænset), som vi betragter pro essen i. En stokastiskpro es er følgelig en funktion af to argumenter nemlig tiden t og ω, hvor Ω er udfaldsrummet.Hvis vi kserer ω vil vi få xt(ω0), dvs. en tidsfunktion eller en realisation af x. Hvis viderimod kserer tidspunktet, dvs. vi betragter pro essen til et givet tidspunkt, t0, vil vipr. denition få en stokastisk variabel. Lad os inden vi går over til at se på hvordan vikan beskrive stokastiske pro esser betragte tre eksempler på stokastiske pro esser og deresrealisationer.Eksempel: 4.4 Hosstående gur 4.6(a) viser en realisation af en binær pro es, der til ethverttidspunkt skifter fortegn med sandsynligheden p og bliver med sandsynligheden 1 − p (dvs. et RBS-signal, Random Binary Signal). 2Eksempel: 4.5 I gur 4.6(b) er angivet en realisation fra en pro es, som vi senere vil kendeunder betegnelsen en autoregressiv pro es. En autoregressiv pro es har (selvfølgelig afhængig afpolens beliggenhed i enheds irklens højre halvplan) normalt en lavpasnatur som gur 6.5 antyder.
2Eksempel: 4.6 Pro essen i eksempel 4.5 har stokastiske egenskaber, der ikke udvikler sig medtiden. Den er et eksempel på det vi senere vil kalde en stationær pro es. Nedenstående gur 4.6( )viser en realisation fra en pro es, der ikke er stationær. Pro essen er af den type som kaldes inte-greret hvid støj. 2Udvidelse: 5 En tidskontinuert stokastisk pro es xt(ω), t ∈ T, ω ∈ Ω er en familie af stoka-stiske variable, xt, hvor t er kontinuert. 2

178 4.2 Beskrivelse af stokastiske pro esser0 10 20 30 40 50 60
−1.5
−1
−0.5
0
0.5
1
1.5RBS−signal (a)
t0 50 100 150 200 250 300 350 400 450 500
−3
−2
−1
0
1
2
3AR−proces (b)
t
0 50 100 150 200 250 300 350 400 450 500−14
−12
−10
−8
−6
−4
−2
0
2Ikke stationaer proces (c)
tFigur 4.6. Et RBS-signal (øverst tv.), udfaldet fra en AR-pro es (øverst th.) og ud-faldet fra en ikke stationær pro es (nederst mf.).4.2 Beskrivelse af stokastiske pro esserDa en stokastisk pro es er en sekvens af stokastiske variable kan vi anvende samme frem-gangsmåde som i forbindelse med stokastiske variable og beskrive en stokastisk pro es medfordelingsfunktionen:F (xt) = FXt(xt, t) = PXt ≤ xt (4.7)eller med tæthedsfunktionen:f(xt) = fXt(xt, t) = ∇xtF (xt) (4.8)hvor vi har anvendt den korte notation, som bebudet i kapitel 3.2 (Del I). Bemærk, atdisse to funktioner i al almindelighed er tidsafhængige. I denne beskrivelse har vi imidlertidingen information om relationenerne mellem de stokastiske variable. Hvis vi er interesseret irelationen mellem de stokastiske variable xt og xs kan vi som i den statistiske basis beskrivedenne med den simultane fordelingsfunktion, F (xt, xs). Denne fordelingsfunktion beskriverkun den parvise relation mellem de stokastiske variable.Lad Tk være en endelig delmængde af indexmængden T , således at Tk har k elementer, dvs.
Tk = t1, t2, ..., tk. Generelt gælder der at vi kan beskrive en stokastisk pro es hvis vi kenderF (xt1 , xt2 , ..., xtk
) for alle værdier af k og alle endelige delmængder, Tk, af indexmængden,T . Den simultane fordelingsfunktion kaldes tilsvarende en endelig dimensional fordelings-funktion. En sådan beskrivelse er selvfølgelig kun operationel ved en parametrisering affordelingerne (eller tæthederne).

1790 2 4 6 8 10 12 14
−1
0
1
2
3
4
5x
tFigur 4.7. Udviklingen af en tæthedsfunktion. Der er desuden angivet en udviklingaf middelværdi og ±√pt.Udvidelse: 6 En tidskontinuert stokastisk pro es kan i lighed med ovenstående beskrives så-fremt vi for alle værdier af k og alle endelige delmængder, Tk, af den kontinuerte indexmængde, T ,kan opskrive den simultane fordelingsfunktion for de stokastiske variable, der er relateret til Tk. 2Et meget vigtigt begreb i forbindelse med beskrivelsen af stokastiske pro esser er middel-værdifunktionen, der er deneret ved
mx(t) = E
n
xt
o
=
Z
Ωx
xtf(xt)dxt (4.9)Denne funktion angiver det forventede pro esforløb. Tilsvarende giver variansfunktionenet mål for pro essens variation omkring denne middelværdifunktion. Variansfunktionen erdeneret ved:Px(t) = V ar(xt) = E
n
(xt −mx(t)) × (xt −mx(t))⊤o (4.10)
=
Z
Ωx
(xt −mx(t)) × (xt −mx(t))⊤f(xt)dxt (4.11)I forhold til den marginale fordeling, F (xt), udgør middelværdi- og variansfunktionen endatareduktion og indeholder ligesom F (xt) ingen information om den tidsmæssige relationmellem de stokastiske variable i pro essen.En mål for den tidsmæssige relation mellem de stokastiske variable er f. eks. kovariansfunk-tionen, der er deneret ved:rx(s, t) = Covxs, xt = E
n
(xs −mx(s)) × (xt −mx(t))⊤o (4.12)Denne funktion udtrykker kovariansen mellem to stokastiske variable til tidspunkterne t og sog har generelt to argumenter, nemlig de to tidspunkter. Kovariansfunktionen betegnes oftesom autokovariansfunktionen for expli it at markere at det er kovariansen mellem stokastiskevariable tilhørende samme pro es. (Dette er modsat krydskovariansfunktionen, som vi senereskal stifte bekendskab med). Vi vil senere vende tilbage til egenskaber ved middelværdi- ogkovariansfunktionen.

180 4.2 Beskrivelse af stokastiske pro esserEn tredie, og en i en reguleringsteknisk sammenhæng mere operationel, metode til beskrivel-se af stokastiske pro esser er ved at angive den stokastiske pro es som en dynamisk funktionaf en kendt stokastisk pro es med spe ielle egenskaber. En sådan standard - eller referen e-pro es kan f. eks. være den pro es, som vi senere kommer til at kende som hvid støj. I detfølgende vil vi se re eksempler på dynamiske modeller for stokastiske pro esser. Først vilvi se på et eksempel på en intern model efterfulgt af tre eksempler på eksterne modeller.Eksempel: 4.7 I dette eksempel er pro essen, ξt, modelleret som en intern systembeskrivelse,hvor tilstandene, x1(t) og x2(t), er drevet af hvid støj.»
x1(t + 1)x2(t + 1)
–
=
»
0.98 10 0.37
– »
x1(t)x2(t)
–
+
»
v1(t)v2(t)
–Selve pro essen, ξt, er en linearkombination af tilstandene overlejret af et hvidt støjbidrag, et.ξt =
`
0.5 0.5´
»
x1(t)x2(t)
–
+ et (4.13)Da et, v1(t) og v2(t) alle er sekvenser af uafhængige stokastiske variable, er den tidsmæssigeafhængighed beskrevet af den dynamiske model, d.v.s. af den interne systembeskrivelse.Ved at kunne beskrive en pro es (med passende egenskaber) ved hjælp en intern model, der er drevetaf hvid støj, kan vi i en beskrivelse af et dynamisk system, der er påvirket af en stokastisk pro es, ξt,indbygge pro esmodellen (af ξt) i den samlede beskrivelse af systemet. Herved er analyseproblemetredu eret til en analyse af dynamiske systemer, der er påvirket af en sekvens uafhængige stokastiskesignaler. 2Eksempel: 4.8 En stokastisk pro es kaldes en MA-pro es (Moving Average, glidende gennem-snit), hvis den kan skrives som et glidende gennemsnit af et, hvor et er en sekvens af uafhængigestokastiske variable. Et eksempel på en sådan pro es er ξt hvor:ξt = et + 0.14et−1 (4.14)Bemærk, at overføringen fra et til ξt ikke har nogle poler og dermed ingen stabilitetsproblemer. 2Eksempel: 4.9 Nedenstående pro es kaldes en AR-pro es (Auto Regressive).
ξt = 0.98ξt−1 − 0.01ξt−2 + et (4.15)hvor et igen er en sekvens af ukorrelerede stokastiske variable. Bemærk at pro essen, ξt, er enfunktion af gamle signaler (ξt−1, ξt−2, ... ) og har et bidrag, et, der er uafhængig af pro essenshistorie. Bemærk endvidere at overføringen fra et til ξt ikke har nogle egentlige nulpunkter (menhar to i origo). 2Eksempel: 4.10 Pro essen:ξt = 1.98ξt−1 + 0.98ξt−2 + et + 0.5et−1 (4.16)kan opfattes som en blanding af en AR og MA - pro es. Den kaldes følgelig for en ARMA-pro es.Overføringen fra et til ξt har både nulpunkter og poler. 2

1814.3 Basale EgenskaberDenitionen af en stokastisk pro es der er givet i det foregående kapitel er meget generel.For at opnå en rimelig operationel teori er det nødvendigt at spe ialisere ret kraftigt. Dennespe ialisering gør det muligt at karakterisere fordelingen af ethvert endeligt udsnitxt1 , xt2 , ..., xtk
(4.17)af pro essen på en rimelig simpel måde. I dette kapitel vil vi diskutere nogle spe ielle egen-skaber der er af interesse bl. a. i forbindelse med reguleringsteknik.4.3.1 Andenordens Pro esserEn stokastisk pro es xt, t ∈ T siges at være en andenordens pro es, hvis der gælder at:E
n
xtx⊤t
o
<∞ for alle t ∈ T (4.18)For sådanne pro esser gælder det at middelværdifunktionen og kovariansfunktionen eksi-sterer. Dvs. at andenordensegenskaber ved fordelingen (af et vilkårligt endeligt udsnit) kanudtrykkes ved disse to funktioner.4.3.2 Normale Pro esserEn stokastisk pro es siges at være normal eller gaussisk, hvis der for ethvert endeligt udsnitaf pro essen gælder at den er gaussisk. Lad Tk = t1, t2, ..., tk ⊂ T for k vilkårlig og lad xkbetegne vektoren:xk = (xt1 , xt2 , ..., xtk
)⊤ (4.19)Pro essen er normal såfremt xk er normalfordelt for vilkårlig k og Tk. Det er velkendtat en normalfordelt stokastisk variabel er fuldstændig karakteriseret ved dens middelværdiog dens varians. Antag, at pro essen har middelværdifunktionen mx(t) = E
n
xt
o og ogkovariansfunktionen rx(s, t) = Covxs, xt. Vi arrangerer de k middelværdier (vektorer medlængden n) i vektoren m,m =
8
>
>
>
<
>
>
>
:
mx(t1)mx(t2)...mx(tk)
9
>
>
>
=
>
>
>
;
(4.20)og arrangerer kovariansmatri erne r(ti, tj) i matri en R:R =
˘
r(ti, tj)¯
=
8
>
<
>
:
r(tl, tl) r(t1, t2) . . . r(t1, tk)... ... ...r(tk, tl) r(tk, t2) . . . r(tk, tk)
9
>
=
>
;
(4.21)
182 4.3 Basale EgenskaberDa kan vi angive den simultane fordeling ved frekvensfunktionen:f(x) = f(xt1 , xt2 , . . . , xtk
) (4.22)=
1p
(2π)knDet(R)Exp
−1
2(x−m)⊤R−1(x−m)
ff (4.23)Det bemærkes, at hvis R er en diagonal matrix (xt er en sekvens af ukorrelerede stokastiskevariable), da gælder spe ielt for en normalpro es at:f(xt1 , xt2 , . . . , xtk
) =kY
i=1
f(xti) (4.24)hvilket viser at xt er en sekvens af uafhængige stokastiske variable.4.3.3 Pro esser med uafhængige inkrementerLad ti ∈ T, i = 1, . . . , k og lad t1 < t2 < . . . < tk. Den stokastiske pro es, xt, er en pro esmed uafhængige inkrementer såfremt det for et vilkårligt k gælder, at de stokastiske variable,xtk
− xtk−1 , xtk−1 − xtk−2 , ..., xt2 − xt1 , xt1 (4.25)er indbyrdes uafhængige. Hvis de stokastiske variable kun er ukorrelerede, da siges pro es-sen at være ortogonal eller blot ukorreleret. En pro es med uafhængige inkrementer kanspe i eres ved fordelingen1 af inkrementet, xt − xs, for vilkårlige værdier af t og s2 af xt1 .Hvis fordelingen af xt−xs, kun er en funktion af t−s, siges pro essen at have stationære in-krementer. Er inkrementerne normalfordelte betegnes pro essen som en pro es med normaleuafhængige inkrementer.4.3.4 Stokastisk StationaritetVerbalt betyder stationaritet i en stokastisk sammenhæng, at de statistiske egenskaber forpro essen ikke udvikler sig tidsmæssigt, dvs. er tidsinvariante. Dette betyder bl. a. at denmarginale fordeling, F (xt), er konstant i tiden. Som før nævnt er der i F (xt) ingen infor-mation om den tidsmæssige relation mellem de stokastiske variable, f. eks. mellem xt og xs.Stationaritet betyder at relationerne mellem de stokastiske variable ikke udvikler sig i tid.Dette medfører bl. a. at den simultane fordeling mellem to stokastiske variable er invariantoverfor tidsforskydninger, d.v.s. at:F (xt, xs) = F (xt+τ , xs+τ ) (4.26)Lad os nu gå over til en mere stringent denition af (streng) stationaritet. Vi denerer førstbegrebet stationaritet til ordenen n.

4.3.4 Stokastisk Stationaritet 183Denition: 4.2 En stokastisk pro es, xt, t ∈ T er strengt stationær til ordenen n hvisder gælder at:F (xt1 , xt2 , ..., xtn) = F (xt1+τ , xt2+τ , ..., xtn+τ ) (4.27)for alle værdier af τ ∈ T og alle endelige delmængder, Tn, af indexmængden T . 2
0 2 4 6 8 10 12 14−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
x
t
Ikke Stationaer Proces
Figur 4.8. Udvikling af den marginale tæthed for et eksempel på en ikke stationærpro esDet er klart, at hvis en pro es er stationær til orden m, da er den også stationær for n < m,idet:F (xt1 , ...xtm−1) = F (xt1 , ...xtm−1 ,∞) (4.28)En stokastisk pro es er strengt stationær, hvis den er stationær til vilkårlig høj orden. Dettekan også formuleres som i følgende denition.Denition: 4.3 En stokastisk pro es, xt, t ∈ T er strengt stationær hvis der gælderat:
F (xt1 , xt2 , ..., xtk) = F (xt1+τ , xt2+τ , ..., xtk+τ ) (4.29)for alle værdier af τ ∈ T , alle endelige delmængder, Tk, af indexmængden, T og alle værdieraf k. 2Betragt nu en stokastisk pro es, der er streng stationær til ordenen 1, dvs. at:
F (xt) = F (xt+τ) (4.30)(for alle værdier af t og τ ) eller at den marginale fordeling er tidsinvariant. Som et direkteresultat heraf er middelværdifunktionen, hvis den eksisterer, konstant:mx(t) = mx (4.31)Tilsvarende gælder der, at variansen (hvis den eksisterer) også er konstant:Px(t) = Σ (4.32)

184 4.3 Basale EgenskaberDet samme kan anføres for højere momenter (såsom skævhed og topstejlhed) forudsat deeksister for den pågældende fordeling. Når vi har en pro es, der er stationær til førsteorden, ved vi at de marginale egenskaber er tidsinvariante, men ikke nødvendigvis noget omrelationerne mellem de enkelte stokastiske variable. Bemærk, at en streng stationær pro esspe ielt er streng stationær til første orden.0 2 4 6 8 10 12 14
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
x
t
Stationaer Proces
Figur 4.9. Udvikling af denmarginale tæthed for et eksempel på en stationær pro esHvis en stokastisk pro es er streng stationær til ordenen 2 er:F (xs, xt) = F (xs+τ , xt+τ ) (4.33)for enhver værdi af s, t og τ . For en sådan pro es gælder naturligvis, at middelværdi og vari-ans (samt skævhed og andre højere ordens momenter) er konstante (forudsat de eksisterer),fordi pro essen også er stationær til ordenen 1. Desuden gælder der at:
rx(s, t) = rx(s− t) (4.34)altså at kovariansfunktionen kun er en funktion af tidsforskellen mellem de to stokastiskevariable og ikke det absolutte tidspunkt. En streng stationær pro es er spe ielt også strengstationær til ordenen 2.På basis af første og anden ordens egenskaberne ved strenge stationære pro esser kan vi nugive en svagere denition af stationaritet.Denition: 4.4 En andenordens stokastisk pro es xt, t ∈ T, siges at være svagt sta-tionær hvis:mx(t) = xx Px(t) = Σ rx(s, t) = rx(s− t) (4.35)
2Bemærkning: 4.1 Bemærk, at der i denitionen på svag stationaritet indgår nogle af deegenskaber, der er gældende for en pro es, der er (streng) stationær til ordenen 2. En strengandenordens stationær pro es er spe ielt svagt stationær. Det modsatte er i al almindelighedikke tilfældet. 2

4.3.5 Ergodiske Pro esser. 185Bemærkning: 4.2 Bemærk ligeledes, at der i denitionen på svag stationaritet kun indgårandenordens momenter af fordelingen. Da en normalpro es er fuldstændig spe i eret af deto første momenter kan man i dette spe ialtilfælde slutte fra svag stationaritet til strengstationaritet (af vilkårlig orden). 24.3.5 Ergodiske Pro esser.En stationær pro es siges løst sagt at være ergodisk, hvis tidsgennemsnit og forventning eridentiske. Som i forbindelse med stationaritet eksister der en denition af streng og svagergodisitet. Mere formelt gælderDenition: 4.5 En stationær stokastisk pro es er svagt ergodisk til første orden, hvis dergælder at:E
n
xt
o
= limN→∞
1
N
NX
t=1
xt (4.36)med sandsynligheden 1. 2Lad g(x) være en vilkårlig funktion for hvilketEnxo eksisterer. Pro essen er strengt ergodisktil første orden hvisE
n
g(xt)o
= limN→∞
1
N
NX
t=1
g(xt) (4.37)Sammenlign denne denition med, at middelværdifunktionen er konstant for en svag statio-nær pro es. Man kunne let forledes til den tro, at alle svagt stationære pro esser er svagtergodiske. Følgende eksempel viser at dette imidlertid ikke er tilfældet.Eksempel: 4.11 Betragt en skalar pro es, der er givet ved:xt+1 = xt x0 ∈ N(0, σ2) (4.38)Vi kan meget nemt opskrive fordelingen for pro essen, idet:
xt = xt−1 = · · · = x0 ∈ N(0, σ2) (4.39)Pro essen er klart stationær. Nu gælder der at:E
n
xt
o
= E
n
x0
o
= 0 (4.40)hvorimod:lim
N→∞1
N
NX
t=1
xt = x0 (4.41)Pro essen er følgelig ikke ergodisk. 2

186 4.3 Basale EgenskaberDenition: 4.6 En stationær stokastisk pro es er svagt ergodisk til anden orden, hvis dergælder at:E
n
xtx⊤s
o
= limN→∞
1
N
NX
t=1
xtx⊤s (4.42)med sandsynligheden 1. 2
Denition: 4.7 Lad x = (xt1 , xt2 , ..., xtn) og lad g(x) være en vilkårlig funktion for hvil-ket E
n
g(x)o eksisterer. En stationær stokastisk pro es er streng ergodisk til n'te orden, hvisder gælder at:
E
n
g(x)o
= limN→∞
1
N
NX
t=1
g(x) (4.43)med sandsynligheden 1. 24.3.6 Markov Pro esser.Markovegenskaben er en meget vigtig egenskab spe ielt i forbindelse med interne pro- esmodeller og tilstandsbegrebet. Antag at ti er elementer i indexmængden T og att1 < t2 < ... < tk.Denition: 4.8 En stokastisk pro es xt, t ∈ T er en Markovpro es hvis:
f(xtk|xtk−1 , xtk−2 , ....) = f(xtk
|xtk−1) (4.44)2Spe ielt gælder det for en Markovpro es at:
f(xt|xt−1, xt−2, ...) = f(xt|xt−1) (4.45)Markovegenskaben har en fortolkning, der er meget analogt til tilstandsbegrebet. For enmarkovpro es er pro essens forhistorie akkumuleret i den sidst foretagne måling.Eksempel: 4.12 Betragt en pro es, der er givet ved:xt+1 = Φxt + vt (4.46)hvor1: vt er uafhængig af vs for s 6= t og hvor2: vt er uafhængig af xs for s ≤ t.
4.3.7 Fordelingsudvikling for en Markovpro es 187Denne pro es er en markovpro es, fordi vt ikke indeholder information om pro essens historie.Bemærk, at det er muligt at erstatte krav 2 med at vt er uafhængig af xt0 , idet krav 1 dermed sikrerat krav 2 er opfyldt. 2Eksempel: 4.13 Betragt en pro es, der er givet ved:xt+1 = Φxt + Γut + vt (4.47)hvor ut er en deterministisk vektor, xt og vt er uafhængige stokastiske vektorer og vt er en sekvensaf stokastisk uafhængige vektorer. Når E
n
vt
o
= 0 har vi umiddelbart at:E
n
xt+1|xt
o
= Φxt + Γut V arxt+1|xt = V arvt (4.48)Da vt er en sekvens af uafhængige stokastiske variable vil en oplysning om f. eks. xt−1 ikke giveos yderlige information (om fordelingen af xt+1) end den der allerede er inkluderet i kendskabet tilxt. 24.3.7 Fordelingsudvikling for en Markovpro esFor en markovpro es er det meget nemt at beregne den simultane fordeling ud fra over-gangsfordelingen og initialfordelingen.Sætning: 4.1 Antag at xt, t ∈ T er en Markov pro es og at tk ∈ T , således at: tk > tk−1.Da gælder at den simultane fordelingsfunktion for pro essen er givet ved:
f(xtk, xtk−1 , ..., xt1) = f(xtk
|xtk−1)f(xtk−1 |xtk−2) × ...× f(xt1) (4.49)2Bevis: Idet vi benytter os af markovegenskaben er:
f(xtk, xtk−1 , ..., xt1) = f(xtk
|xtk−1 , ..., xt1) (4.50)×f(xtk−1 , xtk−2 , ..., xt1) (4.51)
= f(xtk|xtk−1)f(xtk−1 , xtk−2 , ..., xt1) (4.52)
= f(xtk|xtk−1)f(xtk−1 |xtk−2)f(xt1) (4.53)Hvormed sætningen er bevist. 2Spe ielt gælder der et lemma:Lemma 4.1 For en Markov pro es xt, t ∈ T gælder at den simultane fordeling kan skrivessom:
f(xt, xt−1, ..., xt−k) = f(xt|xt−1)f(xt−1|xt−2)...f(xt−k) (4.54)=
k−1Y
i=0
f(xt−i|xt−i−1)
!
f(xt−k) (4.55)
188 4.3 Basale Egenskaber28mmBemærkning: 4.3 Bemærk, at med et kendskab til den marginale tæthedsfunktion, f(xt1),til et tidspunkt samt til overføringstæthederne f(xtk
|xtk−1), kan man beregne den simultanetæthedsfunktion (og dermed også fordelingen) for en Markov pro es. 2Eksempel: 4.14 Betragt igen systemmodellen fra eksempel 4.13, hvor vi fastslog at xt er enMarkov pro es. Antag nu at pro esstøjen er normalfordelt, d.v.s. at:vt ∈ N(0, R1) (4.56)Systemmodellen:
xt+1 = Φxt + Γut + vt (4.57)giver nu at:xt+1|xt ∈ N(Φxt + Γut, R1) (4.58)Antag nu, at vi kender initialfordelingen eller tætheden f(xt0 ). Da vi for denne pro es kenderovergangstætheden, f(xt+1|xt), kan vi bestemme hele den simultane tæthedsfunktion, idet:
f(xt, xt−1, ..., xt0) = f(xt|xt−1)f(xt−1|xt−2)...f(xt0) (4.59)Hvis spe ielt xt0 er normalfordelt kan vi su essivt (med en mindre tilføjelse) anvende sætning 3.19fra den statiske basis til bestemmelse af f(xt, xt−1, ..., xt0). 2Under systemteorien var det vigtigt for os, at kunne beregne løsningen til systemets die-rential/dierens ligning. I forbindelse med stokastiske pro esser er det tilsvarende vigtigt,at kunne beregne hvorledes fordelingerne udvikler sig i tid. Med henblik på en beregning afden tidsmæssige udvikling for den marginale tæthed, har vi for en Markov pro es Chapman- Kolmogorovs sætning:Sætning: 4.2 Antag at xt, t ∈ T er en Markovpro es. Da gælder for m ≥ 1 at:f(xt|xt−m) =
Z
f(xt|xt−1)f(xt−1|xt−m)d(xt−1) (4.60)2Bevis: Vi har indledningsvis at:
f(xt, xt−1|xt−m) = f(xt|xt−1, xt−m)f(xt−1|xt−m) (4.61)= f(xt|xt−1)f(xt−1|xt−m) (4.62)

4.3.7 Fordelingsudvikling for en Markovpro es 189og at:f(xt|xt−m) =
Z
f(xt, xt−1|xt−m)d(xt−1) (4.63)Sætningen fremkommer dermed ved en kombination af disse to udtryk. 2Bemærk, at udtrykket i sætning 4.2 også gælder ubetinget, d.v.s at:f(xt) =
Z
f(xt|xt−1)f(xt−1)d(xt−1) (4.64)idet:f(xt) =
Z
f(xt, xt−1)d(xt−1) (4.65)og:f(xt, xt−1) = f(xt|xt−1)f(xt−1) (4.66)Eksempel: 4.15 En markovpro es, der kun kan antage et endeligt antal diskrete værdier, be-tegnes en markovkæde. Antag, at xt er endimensional og kan antage m forskellige værdier. (Lados for nemheds skyld antage at disse værdier er 1, ...,m. Da kan fordelingen af xt let angives f.eksved en vektor indeholdende de respektive sandsynligheder.ϕ(xt) = [Pxt = 1, ..., Pxt = m] (4.67)Overgangssandsynlighederne kan arrangeres i en matrix, Π, således
Π = Matr [Pxt+1 = i|xt = j] (4.68)I så fald udarter [side 189 (4.64) til:Pxt+1 = i =
mX
j=1
Pxt+1 = i|xt = jPxt = j (4.69)eller i matrix notation:ϕ(xt+1) = Πϕ(xt) (4.70)I litteraturen, der på dette område er ganske omfattende, er der beskrevet metoder, til analyse afdenne type stokastiske pro esser. (Se f.eks. (Cox & Miller 1965), (Brimmett & Stirzaker 1982) eller(Jørsboe 1976)). Denne type pro esser er bl.a. hyppigt forekommende i køteorien ((Iversen 1990)).Betragt spe ielt en markovkæder der til t = 0 med sandsynligheden 1 antager sin første værdi:ϕ(x0) = [1, 0, ...,0] (4.71)Lad overgangsmatri en være givet ved:
Π =
2
6
6
6
4
1 − p − q p 0 . . . 0 qq 1 − p − q p . . . 0 0... ... ... ... ...p 0 0 . . . q 1 − p − q
3
7
7
7
5
(4.72)I gur 4.10-4.12 er udviklingen af frekvensfunktion og to realisationer angivet for p = 0.7 og q =0.005. Antallet af mulige tilstande er m = 6. 2
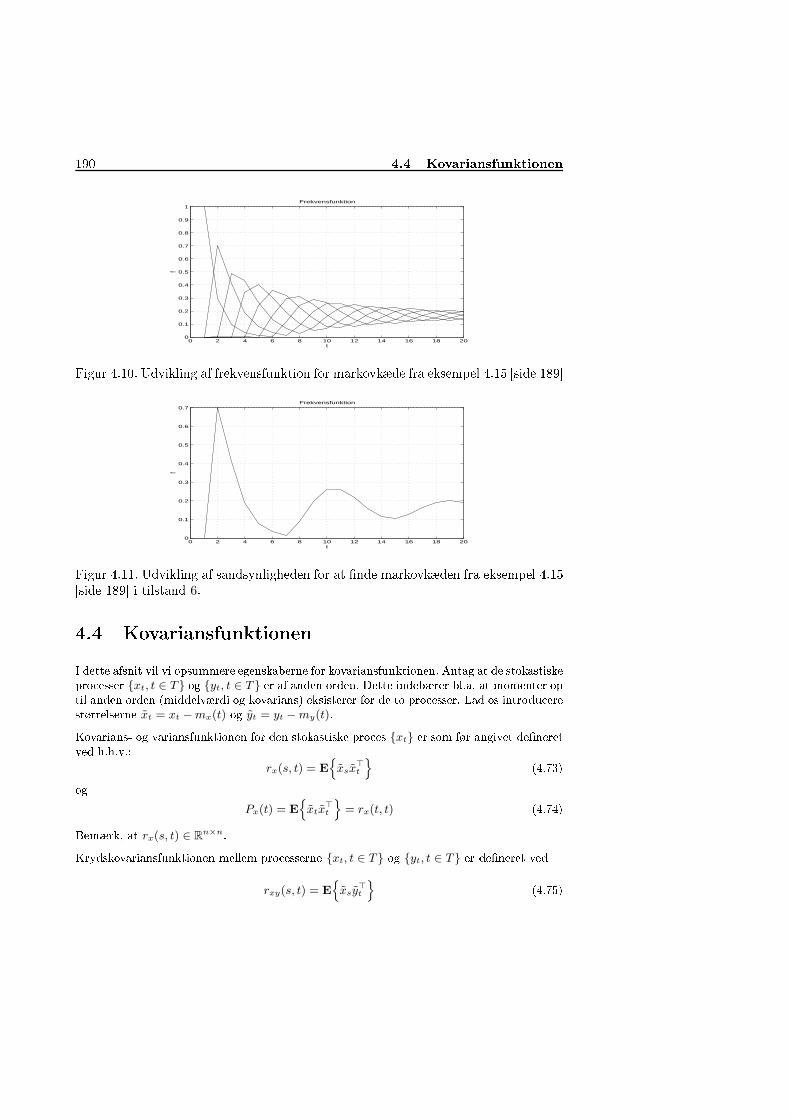
190 4.4 Kovariansfunktionen0 2 4 6 8 10 12 14 16 18 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Frekvensfunktion
f
tFigur 4.10. Udvikling af frekvensfunktion for markovkæde fra eksempel 4.15 [side 1890 2 4 6 8 10 12 14 16 18 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7Frekvensfunktion
f
tFigur 4.11. Udvikling af sandsynligheden for at nde markovkæden fra eksempel 4.15[side 189 i tilstand 6.4.4 KovariansfunktionenI dette afsnit vil vi opsummere egenskaberne for kovariansfunktionen. Antag at de stokastiskepro esser xt, t ∈ T og yt, t ∈ T er af anden orden. Dette indebærer bl.a. at momenter optil anden orden (middelværdi og kovarians) eksisterer for de to pro esser. Lad os introdu erestørrelserne xt = xt −mx(t) og yt = yt −my(t).Kovarians- og variansfunktionen for den stokastiske pro es xt er som før angivet deneretved h.h.v.:rx(s, t) = E
n
xsx⊤t
o (4.73)ogPx(t) = E
n
xtx⊤t
o
= rx(t, t) (4.74)Bemærk, at rx(s, t) ∈ Rn×n.Krydskovariansfunktionen mellem pro esserne xt, t ∈ T og yt, t ∈ T er deneret ved
rxy(s, t) = E
n
xsy⊤t
o (4.75)
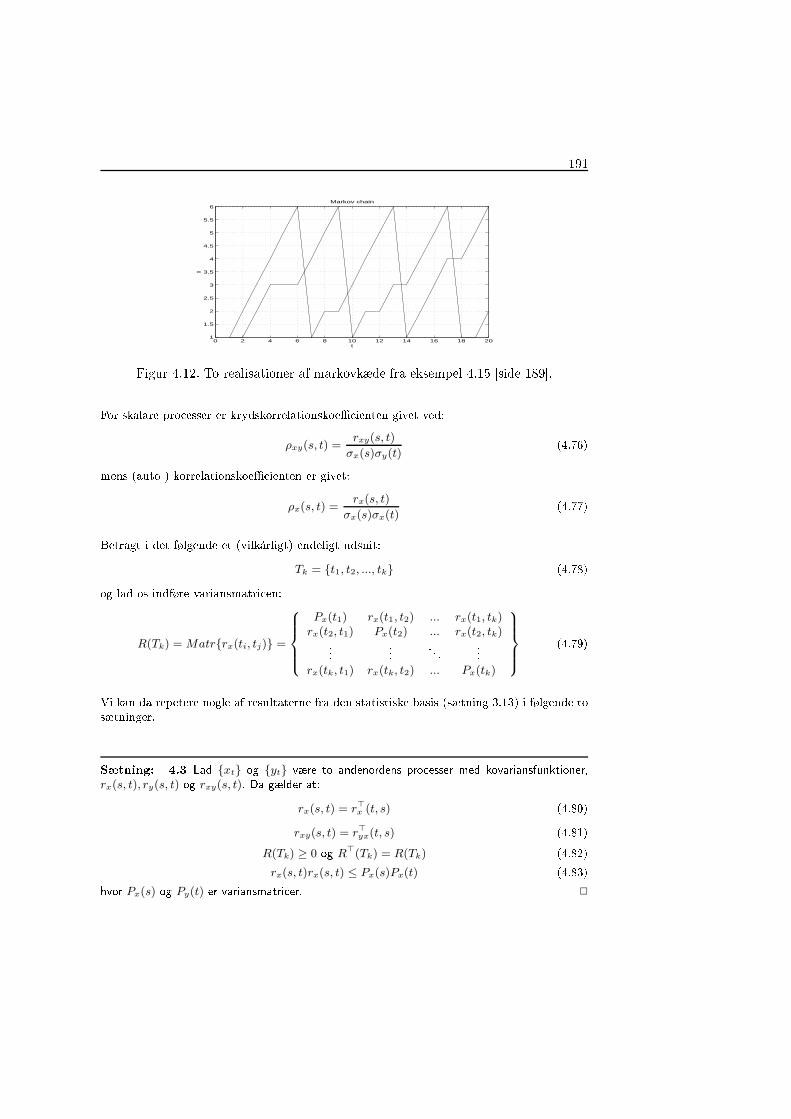
1910 2 4 6 8 10 12 14 16 18 20
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6Markov chain
x
tFigur 4.12. To realisationer af markovkæde fra eksempel 4.15 [side 189.For skalare pro esser er krydskorrelationskoe ienten givet ved:ρxy(s, t) =
rxy(s, t)
σx(s)σy(t)(4.76)mens (auto-) korrelationskoe ienten er givet:
ρx(s, t) =rx(s, t)
σx(s)σx(t)(4.77)Betragt i det følgende et (vilkårligt) endeligt udsnit:
Tk = t1, t2, ..., tk (4.78)og lad os indføre variansmatri en:R(Tk) = Matrrx(ti, tj) =
8
>
>
>
<
>
>
>
:
Px(t1) rx(t1, t2) ... rx(t1, tk)rx(t2, t1) Px(t2) ... rx(t2, tk)... ... . . . ...rx(tk, t1) rx(tk, t2) ... Px(tk)
9
>
>
>
=
>
>
>
;
(4.79)Vi kan da repetere nogle af resultaterne fra den statistiske basis (sætning 3.13) i følgende tosætninger.Sætning: 4.3 Lad xt og yt være to andenordens pro esser med kovariansfunktioner,rx(s, t), ry(s, t) og rxy(s, t). Da gælder at:
rx(s, t) = r⊤x (t, s) (4.80)
rxy(s, t) = r⊤yx(t, s) (4.81)
R(Tk) ≥ 0 og R⊤(Tk) = R(Tk) (4.82)rx(s, t)rx(s, t) ≤ Px(s)Px(t) (4.83)hvor Px(s) og Py(t) er variansmatri er. 2

192 4.4 KovariansfunktionenYderligere gælder følgende sætning, der er en direkte følge af sætning 3.8, fra statistisk basis:Sætning: 4.4 Lad xt og yt være to andenordens pro esser. Da gælder at:zt rz(s, t)
xt + yt rx(s, t) + ry(s, t) + rxy(s, t) + rTxy(t, s)
Φxt Φrx(s, t)ΦT
2Stationære pro esserDet gælder spe ielt, at hvis de to pro esser xt og yt er (svagt) stationære pro esser, daer kovariansfunktionerne kun en funktion af tidsforskellen altså:rx(s, t) = rx(s− t) rxy(s, t) = rxy(s− t) (4.84)I dette tilfælde er matri en:
R(Tk) = Matrrx(ti − tj) =
8
>
>
>
<
>
>
>
:
Px(t1) rx(t1 − t2) ... rx(t1 − tk)rx(t2 − t1) Px(t2) ... rx(t2 − tk)... ... . . . ...rx(tk − t1) rx(tk − t2) ... Px(tk)
9
>
>
>
=
>
>
>
;
(4.85)Endvidere kan sætning 4.3 spe ialiseres til følgende sætning.Sætning: 4.5 Lad xt og yt være to andenordens pro esser, der er svagt stationære. Dagælder at:rx(τ ) = rx(−τ )⊤ (4.86)rxy(τ ) = ryx(−τ )⊤ (4.87)
R(Tk) ≥ 0 og R⊤(Tk) = R(Tk) (4.88)rx(τ )rx(τ ) ≤ Px(t)Px(t) (4.89)
2Endeligt gælder der for svagt stationære pro esser følgende regneregler for lineære operatio-ner, der er samlet i følgende sætning, der direkte er et resultat af sætning 4.4 [side 192 forsvagt stationære pro esser.
193Sætning: 4.6 Lad xt og yt være to andenordens pro esser. Da gælder at:zt rz(τ )
xt + yt rx(τ ) + ry(τ ) + rxy(τ ) + rTxy(−τ )
Φxt Φrx(τ )ΦT
2Udvidelse: 7 Ovennævnte denitioner og resultater for kovariansfunktioner gælder også i kon-tinuert tid, blot er (ikke overraskende) τ ∈ R. 24.5 SpektralegenskaberI dette afsnit vil vi betragte en svagt stationær pro es, xt. En sådan pro es kan karak-teriseres med dens middelværdi, m og dens kovariansfunktion, rx(τ ). At beskrive en stoka-stisk pro es ved den kovariansfunktion (eller korrelationsfunktion) svarer til en beskrivelsei tidsdomainet. Vi vil nu introdu ere en beskrivelse i frekvensdomænet, nemlig pro essensspektrum.Denition: 4.9 Et spektrum Ψ(z) for en svag stationær pro es, xt, er deneret ved:Ψ(z) = Zb[rx(τ )] (4.90)hvor z ∈ C. 2Spektrum for en stokastisk pro es er altså deneret som den bilaterale Z-transformationaf kovariansfunktionen, dvs. der (jvf. appendix A) gælder følgende sammenhænge mellemspektrum og kovariansfunktion:
Ψ(z) =∞X
τ=−∞rx(τ )z−τ
rx(τ ) =1
2πj
I
Ψ(z)zτ−1 (4.91)I appendix A er der angivet et antal sammenhørende par af funktioner og deres Z-transformerede.Egenskaberne for en pro es spektrum er resumeret i følgende sætning.Sætning: 4.7 Lad xt være en svag stationær pro es med spektrum Ψ(z). Da gælder at:Ψ(z−1) = Ψ⊤(z) (4.92)
2

194 4.5 SpektralegenskaberBevis: Vi anvender blot denitionen og symmetriegenskaberne for kovariansfunktionen.Der gælder at:Ψ(z−1) =
∞X
τ=−∞rx(τ )zτ =
∞X
τ=−∞rx(−τ )z−τ =
∞X
τ=−∞r⊤x (τ )z−τ = Ψ⊤(z)hvormed sætningen er bevist. 2Det bemærkes at implikationen af sætningen er, at hvis zi er et nulpunkt (eller en pol) til
Ψ(z), da er z−1i det også.Ofte interesserer vi os kun om forholdene på enheds irklen, dvs. på z = ejω, hvor ω = 2πfTser den normerede vinkelfrekvens.Denition: 4.10 Den spektrale tæthed φ(ω) er for en svagt stationær pro es, xt, erdeneret ved:
φ(ω) = Ψ(ejω) (4.93)hvor ω = 2πfTs er den normerede vinkelfrekvens. 2Denitionen af spektrum giver sammen med (4.91) at den spektrale tæthed og kovarians-funktionen udgør et fourierpar. Dvs. at:φ(ω) = F [rx(τ )] (4.94)Der gælder at:
φ(ω) =∞X
τ=−∞rx(τ )e−jωτ
rx(τ ) =1
2π
Z π
−π
φ(ω)ejωτdω (4.95)Der henvises til appendix A for en oversigt over par af indbyrdes fouriertransformerede.Bemærk spe ielt at:
rx(0) = Varxt =1
2π
Z π
−π
φ(ω)dω (4.96)Tilsvarende kan størrelsen (for ω2 > ω1):I =
1
2π
Z ω2
ω1
φ(ω)dω +1
2π
Z −ω1
−ω2
φ(ω)dω (4.97)fortolkes som det variansbidrag, der ligger i frekvensintervallet mellem ω1 og ω2. Betegnelsenspektraltæthed for φ(ω) er ikke helt korrekt, idet vi i (4.96) skal normere med faktoren 2π.For spektral tætheder angiver vi først en sætning for skalare pro esser.Sætning: 4.8 Lad xt være en svag stationær, skalar pro es. Den spektrale tæthed, φ(ω),har følgende egenskaber:φ(ω) ∈ R φ(ω) ≥ 0 (4.98)
φ(−ω) = φ(ω) (4.99)2

195Bevis: Vi anvender først symmetrien i kovariansfunktionen og (4.95), der giver at:φ(ω) = rx(0) + rx(1)[e−jω + e
jω] + rx(2)[e−j2ω + ej2ω]... (4.100)
= rx(0) + rx(1)cos(ω) + rx(2)cos(2ω)... (4.101)Ligning (4.98) følger af at R(Tk) er positiv semidenit. Se (Söderström 1994) side 40 fordetaljer. Symmetrien for φ(ω) følger direkte af sætning 4.7 [side 193 for z = ejω. 2Bemærk, at e−jω er periodisk (med perioden 2π). Da φ(ω) er en funktion af e−jω er denspektraletæthed også periodisk. Traditionelt afbildes en spektral tæthed derfor kun i in-tervallet [−π, π] (svarende til at tidsdiskrete beskrivelser kun indeholder information underNyquistfrekvensen).Bemærk, at udsagnet i sætning 4.9 omkring spektraletætheden er et udsagn om spektrum,men blot på enheds irklen.For vektorielle pro esser er sætningen lidt mere kompli eret, men selvfølgelig udtryk for detsamme. Lad A∗ betegne den transponerede og kompleks konjugerede af A.Sætning: 4.9 Lad xt være en svag stationær pro es med n elementer. Den spektraletæthed, φ(ω), har følgende egenskaber:φ(ω) = φ
∗(ω) (4.102)φ(ω) ≥ 0 (4.103)
φ(−ω) = φ⊤(ω) (4.104)
2Bemærk at (4.102) angiver at diagonalelementerne af φ er reelle.Eksempel: 4.16 I gur 4.13 [side 196 er den spektrale tæthed for to pro esser angivet. Denene pro es (gurens venstre side) har en svag overvægt ved de høje frekvenser, mens den anden(gurens højre side) har en svag overvægt ved de lave frekvenser. Dette afspejles i realisationer afde de pågældende pro esser (gurens nederste del). 2Eksempel: 4.17 Betragt en svag stationær pro es, der er karakteriseret af:φ(ω) = c |ω| ≤ ωc ≤ π (4.105)Dvs. at kovariansen (jvf. ([side 194 (4.95)) er givet ved:
rn = csin(ωcn)
πn(4.106)I gur 4.14 er spektraltæthed og kovariansfunktion afbildet for to pro esser med samme varians.Bemærk, hvorledes en smal spektraltæthed resulterer i en bred kovariansfunktion og vise versa. 2Lad xt og yt være to svagt stationære stokastiske pro esser. Da eksisterer krydskovariansenog vi kan indføre pro essens krydsspektrum og krydsspektraltæthed.

196 4.5 Spektralegenskaber−2 0 2
0
1
2
3
HF−proces
S d
ensi
ty
t
0 50 100−2
−1
0
1
2HF−proces
x
t
−2 0 20
1
2
3
LF−proces
S d
ensi
ty
t
0 50 100−2
−1
0
1
2LF−proces
x
tFigur 4.13. Spektraltæthed (ø. tv.) og en realisation (n. tv.) af en pro es med ho-vedvægt på de høje frekvenser (HF). Tilsvarende for en pro es med hovedvægt på delave frekvenser (LF).Denition: 4.11 Et krydsspektrum mellem to svagt stationære pro esser, xt og yt,er deneret ved:Ψxy(z) = Zb[rxy(τ )] (4.107)hvor z ∈ C. Krydsspektraltætheden er deneret ved:φxy(ω) = Ψxy(ejω) (4.108)hvor ω = 2πfTs ∈ R er den normerede vinkelfrekvens. 2Som for et spektrum gælder der at krydsspektrum og krydskovariansfunktionen udgør etpar overfor den bilaterale Z-transformation, dvs.
Ψxy(z) =
∞X
τ=−∞rxy(τ )z−τ
rxy(τ ) =1
2πj
I
Ψxy(z)zτ−1 (4.109)Tilsvarende udgør krydsspektraltætheden og krydskovariansfunktionen et fourierpar. Dvs.at:φxy(ω) = F [rxy(τ )] (4.110)eller:
φxy(ω) =
∞X
τ=−∞rxy(τ )e−jωτ
rxy(τ ) =1
2π
Z π
−π
φxy(ω)ejωτdω (4.111)
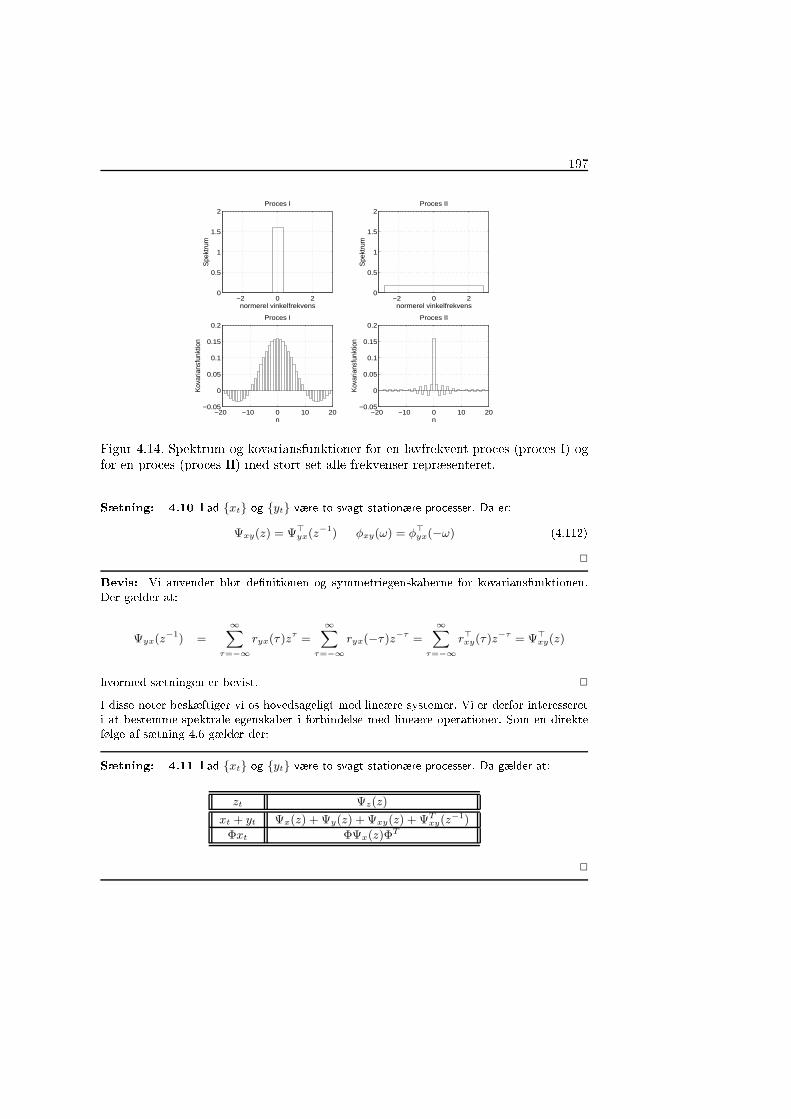
197−2 0 2
0
0.5
1
1.5
2Proces I
Spe
ktru
m
normerel vinkelfrekvens
−20 −10 0 10 20−0.05
0
0.05
0.1
0.15
0.2
n
Kov
aria
nsfu
nktio
n
Proces I
−2 0 20
0.5
1
1.5
2Proces II
Spe
ktru
m
normerel vinkelfrekvens
−20 −10 0 10 20−0.05
0
0.05
0.1
0.15
0.2
n
Kov
aria
nsfu
nktio
n
Proces II
Figur 4.14. Spektrum og kovariansfunktioner for en lavfrekvent pro es (pro es I) ogfor en pro es (pro es II) med stort set alle frekvenser repræsenteret.Sætning: 4.10 Lad xt og yt være to svagt stationære pro esser. Da er:Ψxy(z) = Ψ⊤
yx(z−1) φxy(ω) = φ⊤yx(−ω) (4.112)
2Bevis: Vi anvender blot denitionen og symmetriegenskaberne for kovariansfunktionen.Der gælder at:Ψyx(z−1) =
∞X
τ=−∞ryx(τ )zτ =
∞X
τ=−∞ryx(−τ )z−τ =
∞X
τ=−∞r⊤xy(τ )z−τ = Ψ⊤
xy(z)hvormed sætningen er bevist. 2I disse noter beskæftiger vi os hovedsageligt med lineære systemer. Vi er derfor interessereti at bestemme spektrale egenskaber i forbindelse med lineære operationer. Som en direktefølge af sætning 4.6 gælder der:Sætning: 4.11 Lad xt og yt være to svagt stationære pro esser. Da gælder at:zt Ψz(z)
xt + yt Ψx(z) + Ψy(z) + Ψxy(z) + ΨTxy(z−1)
Φxt ΦΨx(z)ΦT
2
198 4.5 SpektralegenskaberUdvidelse: 8 Som før nævnt (i udvidelse7 [side 193) er denitioner og resultater for kovari-ansfunktionen (og for krydskovariansfunktionen) de samme i kontinuert tid (blot er τ ∈ R). Denneegenskab er naturligvis bevaret i de spektrale egenskaber. Der gælder denitionsmæssigt at:Ψx(s) = Lb[rx(τ)] Ψxy(s) = Lb[rxy(τ)] s ∈ C (4.113)og at:
φx(ω) = Ψx(jω) ∈ Cn×n φxy(ω) = Ψxy(jω) (4.114)Bemærk, at i kontinuert tid er ω ikke begrænset. Spektrum opfylder:
Ψx(s) = Ψ⊤x (−s) Ψxy(s) = Ψ⊤
yx(−s) (4.115)hvorfor der for den spektrale tæthed gælder at:φx(ω) = φ⊤
x (−ω) ≥ 0 φxy(ω) = φ⊤yx(−ω) (4.116)Eekten E i et bestemt (vinkel)frekvensbånd fra ω1 til ω2 er givet ved:
E =1
π
Z ω2
ω1
φx(ω)dω (4.117)En eksisterende pro es (f.eks. en pro es med endelig eekt) må således have en spektraltæthed, derer aftagende for |ω| → ∞. 2Efter at vi har introdu eret begreber omkring de spektrale egenskaber er vi i stand til atintrodu ere en spe iel stokastisk pro es, der går under betegnelsen hvid støj. Ved at drageen analogi til lyslæren vil vi denere hvid støj efter følgende denition.Denition: 4.12 Hvid støj er en svag stationær pro es, der har konstant spektraltæthed.2Antag, at et er hvid støj. Det vil spe ielt sige at pro essen har konstant middelværdi ogvarians, σ2 (fordi pro essen er svagt stationær). Da nu
φe(ω) = c (4.118)er:re(τ ) = c
sin(πτ )
πτ=
c for τ = 00 ellers (4.119)Men da variansen af et er lig σ2 får vi at:
re(τ ) = σ2δτ φe(ω) = σ
2 (4.120)hvor δτ Dira s deltafunktion (i diskret tid).Eksempel: 4.18 Antag, at en pro es er givet ved:et ∈ Niid(0, σ2) (4.121)altså at et er en sekvens af stokastisk uafhængige N(0, σ2)−fordelte variable. Denne pro es er etspe ielt eksempel på hvid støj. I gur 4.15 [side 199 er kovariansfunktion og spektraltæthed angivetsammen med en realisation af pro essen. 2
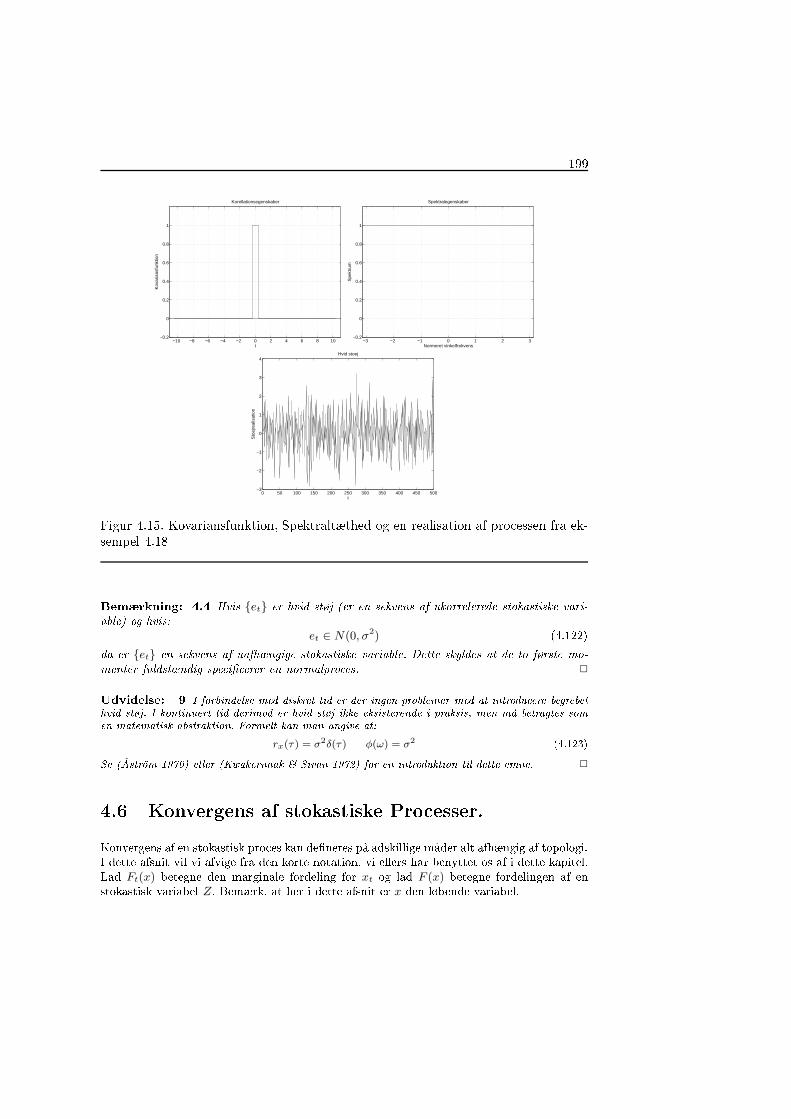
199−10 −8 −6 −4 −2 0 2 4 6 8 10
−0.2
0
0.2
0.4
0.6
0.8
1
t
Kov
aria
nsfu
nktio
n
Korellationsegenskaber
−3 −2 −1 0 1 2 3−0.2
0
0.2
0.4
0.6
0.8
1
Spe
ktru
mNormeret vinkelfrekvens
Spektralegenskaber
0 50 100 150 200 250 300 350 400 450 500−3
−2
−1
0
1
2
3
4
Sto
ejre
alis
atio
n
t
Hvid stoej
Figur 4.15. Kovariansfunktion, Spektraltæthed og en realisation af pro essen fra ek-sempel 4.18Bemærkning: 4.4 Hvis et er hvid støj (er en sekvens af ukorrelerede stokastiske vari-able) og hvis:et ∈ N(0, σ2) (4.122)da er et en sekvens af uafhængige stokastiske variable. Dette skyldes at de to første mo-menter fuldstændig spe i erer en normalpro es. 2Udvidelse: 9 I forbindelse med diskret tid er der ingen problemer med at introdu ere begrebethvid støj. I kontinuert tid derimod er hvid støj ikke eksisterende i praksis, men må betragtes somen matematisk abstraktion. Formelt kan man angive at:
rx(τ) = σ2δ(τ) φ(ω) = σ2 (4.123)Se (Åström 1970) eller (Kwakernaak & Sivan 1972) for en introduktion til dette emne. 24.6 Konvergens af stokastiske Pro esser.Konvergens af en stokastisk pro es kan deneres på adskillige måder alt afhængig af topologi.I dette afsnit vil vi afvige fra den korte notation, vi ellers har benyttet os af i dette kapitel.Lad Ft(x) betegne den marginale fordeling for xt og lad F (x) betegne fordelingen af enstokastisk variabel Z. Bemærk, at her i dette afsnit er x den løbende variabel.
200 4.6 Konvergens af stokastiske Pro esser.Denition: 4.13 Den stokastiske pro es xt, t = 1, 2, ... siges af konvergere i fordelingmod en stokastisk variabel Z med fordeling F såfremt:
Ft(x) → F (x) for t→ ∞ (4.124)(i ethvert kontinuitetspunkt for F ). Vi skriver at:xt → Z i ford. (4.125)
2
Denition: 4.14 Den stokastiske pro es xt, t = 1, 2, ... siges at konvergere i sandsyn-lighed til den stokastiske variable Z såfremt der for ethvert ǫ > 0 gælder at:P|xt − Z| > ǫ → 0 for t→ ∞ (4.126)Vi skriver at:
xt → Z i sandsynlighed (4.127)2
Denition: 4.15 Lad xt, t = 1, 2, ... være en andenordens pro es. Pro essen konverge-rer i middelkvadrat til en stokastisk variabel, Z , såfremt:E
n
(xt − Z)(xt − Z)⊤o
→ 0 for t→ ∞ (4.128)Vi skriver i dette tilfælde at:xt → Z m.k (4.129)
2
Denition: 4.16 Den stokastiske pro es xt, t = 1, 2, ... siges af konvergere med sand-synligheden 1 (eller næsten sikkert) til Z såfremt der for ethvert ǫ > 0 og δ eksisterer ett0(ǫ, δ) således at der for alle t > t0 gælder at:
P|xt − Z| < ǫ > 1 − δ (4.130)Vi skriver at:xt → Z m.s.1 (4.131)
2
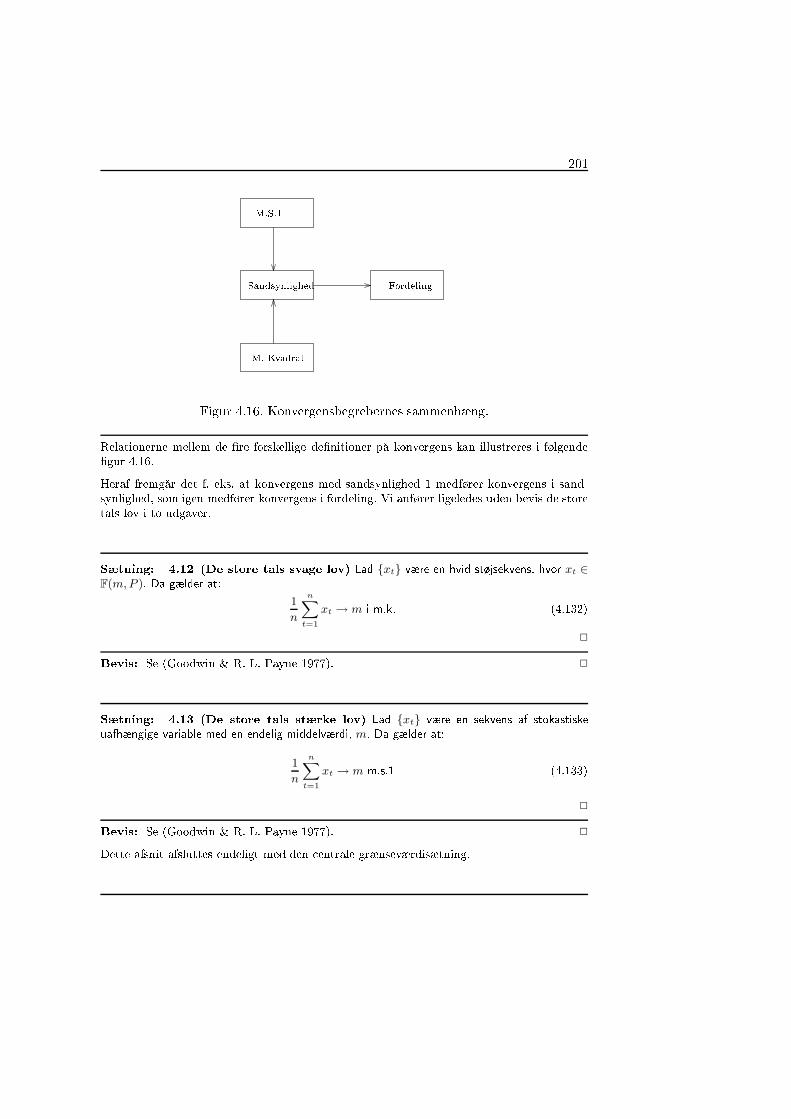
201M. KvadratM.S.1 FordelingSandsynlighed
Figur 4.16. Konvergensbegrebernes sammenhæng.Relationerne mellem de re forskellige denitioner på konvergens kan illustreres i følgendegur 4.16.Heraf fremgår det f. eks. at konvergens med sandsynlighed 1 medfører konvergens i sand-synlighed, som igen medfører konvergens i fordeling. Vi anfører ligeledes uden bevis de storetals lov i to udgaver.Sætning: 4.12 (De store tals svage lov) Lad xt være en hvid støjsekvens, hvor xt ∈F(m,P ). Da gælder at:
1
n
nX
t=1
xt → m i m.k. (4.132)2Bevis: Se (Goodwin & R. L. Payne 1977). 2Sætning: 4.13 (De store tals stærke lov) Lad xt være en sekvens af stokastiskeuafhængige variable med en endelig middelværdi, m. Da gælder at:
1
n
nX
t=1
xt → m m.s.1 (4.133)2Bevis: Se (Goodwin & R. L. Payne 1977). 2Dette afsnit afsluttes endeligt med den entrale grænseværdisætning.
202 4.6 Konvergens af stokastiske Pro esser.Sætning: 4.14 (Den entrale grænseværdisætning) Lad xt være en sekvens af u-afhængige F(m,P )- fordelte stokastiske variable. Da gælder at:zt → Z i fordeling (4.134)hvor:
zt =1√t
tX
k=1
(xt −m) og Z ∈ N(0, P ) (4.135)2Bevis: Se (Goodwin & R. L. Payne 1977). 2
Kapitel 5Stokastiske Pro esmodeller.I dette kapitel vil vi fokusere på hvorledes vi kan modellere og analysere stokastiske pro esser.Vi vil først tage udgangspunkt i den interne beskrivelse af deterministiske systemer, dvs.i tilstandsbegrebet, og udvide den til det stokastiske tilfælde. Dette problem behandlesindledningsvis helt generelt og spe ialiseres derefter til lineære gaussiske pro esser. Kapitletsanden del omhandler eksterne pro esmodeller.5.1 Interne Pro esmodeller.Tilstandsmodeller dvs. systemer beskrevet af første ordens dierensligninger er ofte megetanvendelige i forbindelse med analyse af deterministiske systemer. I dette kapitel vil vi visehvordan tilstandsbegrebet kan anvendes i forbindelse med stokastiske systemer. Dette lederfrem til en introduktion af stokastiske dierensligninger. Sådanne pro esser er markovpro- esser.Tilstandsbegrebet har har sin oprindelse i årsag - eekt relationen fra den klassiske mekanik.F.eks. er en partikels bevægelse entydigt bestemt af fremtidige kraftpåvirkninger og af dennuværende position og hastighed. For den fremtidige bevægelse er det ligegyldigt hvordanden nuværende position og hastighed er opnået. Intuitivt kan man sige, at tilstandene erden minimale information om systemets historie, som er nødvendig for at prædiktere sy-stemets fremtidige bevægelse. For deterministiske systemer i fri bevægelse er den fremtidigebevægelse entydigt bestemt af de aktuelle tilstandsværdier.For stokastiske systemer kan vi naturligvis ikke kræve at den fremtidige bevægelse er entydigtbestemt af de aktuelle tilstande. En naturlig udvidelse af tilstandsbegrebet fra determini-stiske systemer til stokastiske systemer er, at kræve at fremtidige tilstandsfordelinger erentydigt bestemt ved de aktuelle tilstande. Hvis vi sammenligner med denitionen af enmarkovpro es bemærker vi, at vi dermed kræver at systemets tilstande kan beskrives som203
204 5.1 Interne Pro esmodeller.en markovpro es.Da vi beskæftiger os med tidsdiskrete systemer, normerer vi med samplingperioden Ts,hvorved indexmængden består af heltal, d.v.s. af f.eks.T = ...,−1, 0, 1, ... (5.1)ellerT = 0, 1, 2, ... (5.2)Tilstandsudviklingen for et (endeligt dimensionalt) deterministisk tidsdiskret system kanbeskrives ved en ordinær dierensligning:xt+1 = f(xt, t) (5.3)med initialbetingelsen, xt0 = x0. Her er xt tilstandsvektoren og t angiver tiden. Den fremtidi-ge bevægelse af systemet er derfor entydigt bestemt af xt til et givet tidspunkt t. Bevægelsenafhænger ikke af på hvilken måde xt er opnået. Lad ξt være en vektor indeholdende voresudgange af det deterministiske system. For et deterministisk system opnås vores målingersom en funktion g af systemets tilstande samt tiden, t, d.v.s. at:ξt = g(xt, t) (5.4)Vi vil nu diskutere, hvordan vores tilstandsmodel kan udvides til det stokastiske tilfælde.Antag, at xt+1 ikke entydigt er bestemt ved f(xt, t) som udtrykt i tilstandsmodellen, menat xt+1 er en stokastisk variabel der dels afhænger af xt og t, dels afhænger af et tilfældigtbidrag, vt. Vi kan da skrive
xt+1 = f(xt, vt, t) (5.5)I en stokastisk sammenhæng er systemtilstandene deneret ved, at deres fordeling til et givettidspunkt sammen med påvirkningernes fordeling entydigt fastlægger tilstandenes fremtidigefordeling.For at spe i ere tilstandsudviklingen skal vi ikke angive initialværdien af x0, men derimodinitialfordelingen af x0. Samtidigt må vi angive fordelingen af vt. Hvis vi arbejder medtætheder, skal vi kende:x0 : ϕ(x0) og vt : ϕ(vt) (5.6)Hvis udtrykket for xt+1 skal være en stokastisk tilstandsmodel, må vi kræve at fordelingenfor fremtidige tilstande entydigt er bestemt af de aktuelle tilstands værdier. D.v.s. at enbetinget fordeling af xt+1 givet xt ikke afhænger af forrige værdier af tilstandene. Medandre ord betyder dette, at en betinget fordeling af vt givet xt er uafhængig af forrigetilstandsværdier. En model, der har denne egenskab kaldes en stokastisk dierensligning.Det bemærkes at pro essen deneret ved xt, t ∈ T,er en markovpro es.For udgangen, ξt, har vi tilsvarende, at denne ikke entydigt er bestemt af systemets tilstande
xt, men er en stokastisk variabel, der delvist afhænger af xt. Vi kan skrive:ξt = g(xt, et, t) (5.7)hvor et er en stokastisk variabel, der er uafhængig af forrige tilstandsværdier. Bemærk atudgangen, ξt, ikke nødvendigvis er en markovpro es.
2055.2 Fordelingsudvikling for en markovpro esVi vil nu diskutere hvorledes vi generelt kan beregne den marginale og simultane tæthedfor tilstandene, xt. Vi vil senere spe ialisere til det linære gaussiske tilfælde. Den stoka-stiske pro esmodel samt fordelingen af pro esstøjen, vt, giver os mulighed for at beregneovergangstætheden ϕ(xt+1|xt). Da vi endvidere kender initialtætheden for tilstandene, kanvi opstille en rekursion til beregning af marginaltæthederne. Idet vi benytter os af Markovegenskaben, har vi nedenstående sætning.Sætning: 5.1 Antag at tilstanden, xt er givet ved:xt+1 = f(xt, vt, t) (5.8)med initialtætheden, ϕ(x0). Antag yderligere at pro esstøjen, vt, er uafhængig af tidligere til-standsværdier, xs, s ≤ t. Da gælder, at den marginale tæthed er givet ved:
ϕ(xt+1) =
Z
ϕ(xt+1|xt)ϕ(xt)dxt (5.9)2Bevis: Vi har benyttet os af at xt pr. denition er en markovpro es, hvorved sætningenblot er en gentagelse af sætning 3.12 2Vi kan endvidere benytte markovegenskaben til at opskrive den simultane fordelingsfunk-tion.Sætning: 5.2 Den simultane tæthedsfunktion for tilstanden er givet ved:
ϕ(xt+n, ..., xt) = ϕ(xt+n|xt+n−1) × ...× ϕ(xt+1|xt)ϕ(xt) (5.10)2Bevis: Her har vi blot anvendt sætning [side 139 (3.129), idet xt er en Markov pro es. 2Beregningerne, der er involveret i de to sætninger synes umiddelbart relativt besværlige.Men, som illustreret i eksempel 3.1 [side 120 og eksempel 3.8 [side 126, kan fordelingernesædvanligvis parametriseres. Hvis de indgående fordelinger har en passende behagelig typeresulterer sætningerne i et sæt rekursioner for disse parametre. Dette er tilfældet for detlineære - gaussiske tilfælde, som vi vil behandle i det efterfølgende afsnit.Den marginale tæthed for udgangen ξt kan vi bestemme, idet observationsligningen:
ξt = g(xt, et, t) (5.11)sammen med fordelingen af et, d.v.s ϕ(et), giver os et kendskab til ξt|xt. Hermed kan vibestemme tætheden af følgende sætning.

206 5.3 Lineære Gaussiske Pro esser.Sætning: 5.3 Tætheden for udgangen:ξt = g(xt, et, t) (5.12)er givet ved:
ϕ(ξt) =
Z
ϕ(ξt|xt)ϕ(xt)dxt (5.13)2Bevis: Vi anvender blot endnu engang sætning 3.12 fra den Statistiske Basis på voresnuværende tilfælde. 25.3 Lineære Gaussiske Pro esser.Vi vil nu spe ialisere til de gaussiske pro esser, der kan beskrives af lineære dierensligninger.Betragt følgelig en stokastisk pro es, der er givet ved den lineære stokastiske dierensligning:
xt+1 = Φt+1|txt + vt (5.14)hvor xt er en n-dimensionel tilstandsvektor. Pro essen, vt, t ∈ T, er en sekvens af n-dimensionale, normalfordelte, uafhængige stokastiske vektorer, Φ er en n × n matrix medelementer, der eventuelt er tidsvariende. Vektorerne vt og vs er stokastisk ukorrelerede (nårs 6= t). Vektoren vt er endvidere ukorreleret med xs for s ≤ t. Tilstandspro essen, xt erfølgelig en markovpro es. Den normale fordeling for vt er spe i eret ved det første og andetmoment:
mv(t) = E
n
vt
o
=
8
>
>
>
<
>
>
>
:
00...0
9
>
>
>
=
>
>
>
;
(5.15)R1(t) = E
n
vtv⊤t
o
=
8
>
>
>
<
>
>
>
:
σ11 σ12 ... σ1n
σ21 σ22 ... σ2n... ... . . . ...σn1 σn2 ... σnn
9
>
>
>
=
>
>
>
;
(5.16)d.v.s. at:vt ∈ N(0, R1(t)) (5.17)Initialtilstanden, x0, er også antaget at være normalfordelt med middelværdi m0 og varians,
P0, altså:x0 ∈ N(m0, P0) (5.18)Den stokastiske pro es xt, t ∈ T er følgelig en normalpro es, idet der for et vilkårligt ende-ligt udsnit af pro essen: xtk
, xtk−1 , ..., xt1 gælder, at enhver linearkombination af elementerneer skalart normalfordelt. Den stokastiske pro es xt, t ∈ T kan derfor fuldstændig karakte-riseres ved dens middelværdifunktion og dens kovariansfunktion. Lad os først bestemme demarginale egenskaber.

207Sætning: 5.4 Antag at pro essen xt er givet ved den lineære dierensligning:xt+1 = Φt+1|txt + vt xt0 ∈ N(m0, P0) (5.19)hvor:
vt ∈ N(0, R1(t)) (5.20)Antag endvidere at pro esstøjen, vt, er en sekvens at uafhængige stokastiske variable, deryderligere er uafhængige af xs for s ≤ t. Da er xt en normal pro es og:xt ∈ N(mt, Pt) (5.21)hvor:
mt+1 = Φt+1|tmt mt0 = m0 (5.22)Pt+1 = Φt+1|tPtΦ
⊤t+1|t +R1(t) Pt0 = P0 (5.23)
2Bevis: Sætningen er en umiddelbar følge af sætning 3.21 [side 150 fra den statistiske basis.2Lad os nu bestemme de simultane egenskaber for xt. Da tilstandspro essen, xt, er normaler den simultane fordeling fuldstændig spe i eret ved middelværdi - og kovariansfunktionen.Vi vil nu bestemme udviklingen for kovariansfunktionen, der er deneret ved:
Rx(s, t) = E
n
(xs −ms)(xt −mt)⊤o (5.24)Antag indledningsvis at s > t. Vi kan dermed skrive transitionsmatri en som:
Φs|t = Φs|s−1 × Φs−1|s−2 × ...× Φt+1|t (5.25)og denere hjælpestørrelsen xt som:xt = xt −mt (5.26)Da nu xs (jvf. (I:166)) kan skrives som:
xs = Φs|txt +s−1X
i=t
Φs|i+1vi (5.27)har vi at:Rx(s, t) = E
n
xsx⊤t
o
= E
n
Φs|txt +
s−1X
i=t
Φs|i+1vi
!
x⊤t
o (5.28)Da nu vi har middelværdien 0 og er uafhængig af xt for i ≤ t nder vi at:Rx(s, t) = Φs|tPt for s > t (5.29)Dette udtryk gælder naturligvis også for s = t, idet Φt|t = I . Vi opsummerer resultatet ifølgende sætning.

208 5.3 Lineære Gaussiske Pro esser.Sætning: 5.5 Antag at xt er givet som i sætning 5.4. Da gælder, at kovariansfunktionen er:Rx(s, t) = Φs|tPt for s ≥ t (5.30)
2Bemærkning: 5.1 I sætning 5.4 og 5.5 var det antaget at xt og vt er normalpro esser.Hvis denne antagelse slækkes til at xt og vt er andenordens pro esser, da er xt en andenor-dens pro es med de angivne momenter (dvs. udtryk for middelværdi, varians og korrelation).Kravet om uafhængighed kan i så fald også slækkes til et krav om ukorrelation. 2Vi har nu bestemt de stokastiske egenskaber for tilstandspro essen, der kan modelleres meden markovpro es. Vi vil nu betragte en pro estype, der kan opfattes som en støjfyldt line-arkombination af en tilstandspro es. På grund af ligheden med det dynamiske system vil vikalde den for en pro esudgang.Sætning: 5.6 Lad xt være givet som i sætning 5.4 og lad pro essen ξt være givet ved:ξt = ϕ
⊤xt + et et ∈ N(0, R2(t)) (5.31)Her er et en sekvens af ukorrelerede normalfordelte stokastiske variable, der er ukorreleret med
xs for s ≤ t og med vt for s 6= t. Lad Cov vt, et = R12. Pro essen ξt er da en normalpro es,dvs.ξt ∈ N(µt, Qt) (5.32)hvor:µt = ϕ
⊤mt (5.33)
Qt = ϕ⊤Ptϕ+R2(t) (5.34)og for s > t:
Rξ(s, t) = ϕ⊤Rx(s, t)ϕ+ ϕ
⊤Φs|t+1R12 (5.35)= ϕ
⊤Φs|tPtϕ+ ϕ⊤Φs|t+1R12 (5.36)
2Bevis: Sætningens første del er en følge af sætning 3.21 fra den statistiske basis. Videre erfor s > t:Rξ(s, t) = E
n
(ϕ⊤xs + es −mξ(s))(ϕ
⊤xt + et −mξ(t))
⊤o (5.37)
= ϕ⊤Rx(s, t)ϕ+ ϕ
⊤Φs|t+1R12 (5.38)2I sætning 5.6 var det antaget at xt og et er normalpro esser. Hvis denne antagelse slækkestil at xt og et er andenordens pro esser, da er ξt en andenordens pro es med de angivnemomenter.

2095.4 Lineære Tidsinvariante Pro esser.Lad os nu yderligere spe ialisere os til lineære tidsinvariante pro esser, der ofte betegnessom LTI-pro esser. Vi antager at:xt+1 = Φxt + vt (5.39)hvor xt er en n-dimensionel tilstandsvektor. Pro essen, vt, t ∈ T, er en sekvens af n-dimensionale, normalfordelte, uafhængige stokastiske vektorer, Φ er en n × n matrix. Vek-torerne vt og vs er stokastisk ukorrelerede (når s 6= t). Vektoren vt er endvidere ukorreleretmed xs for s ≤ t. Tilstandspro essen, xt er følgelig en markovpro es. Den normalefordeling for vt er spe i eret ved middelværdi og varians:
mv = E
n
vt
o
=
8
>
>
>
<
>
>
>
:
00...0
9
>
>
>
=
>
>
>
;
(5.40)R1 = E
n
vtv⊤t
o
=
8
>
>
>
<
>
>
>
:
σ11 σ12 ... σ1n
σ21 σ22 ... σ2n... ... . . . ...σn1 σn2 ... σnn
9
>
>
>
=
>
>
>
;
(5.41)dvs. at:vt ∈ Niid(0, R1(t)) (5.42)For tidsinvariante pro esser har vi at Φt+1|t = Φ og dermed at:
Φs|t = Φs−t for s ≥ t (5.43)Initialtilstanden, x0, antages også at være normalfordelt med middelværdi m0 og varians,P0, altså:
x0 ∈ N(m0, P0) (5.44)Den stokastiske pro es xt, t ∈ T er følgelig en normalpro es. Vi kan derfor gentage sætning5.4 og 5.5 for det tidsinvariante tilfælde.Sætning: 5.7 Antag at pro essen xt er givet ved den lineære dierensligning:xt+1 = Φxt + vt xt0 ∈ N(m0, P0) vt ∈ Niid(0, R1) (5.45)Antag endvidere at pro esstøjen, vt, er en sekvens at ukorrelerede normalfordelte stokastiskevariable, der yderligere er ukorreleret med xs for s ≤ t. Da er xt en normal markovpro es og:
xt ∈ N(mt, Pt) (5.46)hvor:mt+1 = Φmt mt0 = m0 (5.47)
Pt+1 = ΦPtΦ⊤ +R1 Pt0 = P0 (5.48)

210 5.4 Lineære Tidsinvariante Pro esser.Endvidere er kovariansfunktionen givet ved:Rx(s, t) = Φs−t
Pt for s ≥ t (5.49)2Bevis: Sætningens første del er en umiddelbar følge af sætning 3.21 fra den statistiskebasis. Endvidere gælder der (for s > t) jvf. 1.164 at:
xs = Φs−txt + Wv
c (s− t)V s−1 (5.50)hvor (ifølge (1.165)):Wv(τ ) =
`
I,Φ, ...,Φτ−2,Φτ−1´ (5.51)og hvor (jvf. (1.166)):
V s−1 = (vs−1, vs−2, ..., vt)⊤ (5.52)Dermed er:
Rx(s, t) = E
n
(xs −ms)(xt −mt)⊤o
= Φs−tPt (5.53)som angivet i sætningen. 2Mere kompakt kan vi for middelværdi og varians skrive at:
mt = Φt−t0m0 (5.54)Pt = Φt−t0P0(Φ
t−t0)⊤ +t−1X
i=0
ΦiR1(Φ
i)⊤ (5.55)eller:Pt = Φt−t0P0(Φ
t−t0)⊤ + Wv(τ )R1[Wv(τ )]⊤ (5.56)hvor R1 = diag(R1, R1, ..., R1). Hvis alle egenværdierne for Φ ligger indenfor enheds irklenvil middelværdi og varians konvergere og vi kan vise at grænserne:m∞ = lim
t0→−∞mt P∞ = lim
t0→−∞Pt (5.57)eksisterer. Til bestemmelse af m∞ og P∞ gælder:
m∞ = 0 P∞ = ΦP∞Φ⊤ +R1 (5.58)For kovariansfunktionen gælder der (under forudsætning af at egenværdierne til Φ liggerindenfor enheds irklen) at for t0 → −∞i at den kun afhænger af tidsforskellen τ = s− t ogat:Rx(τ ) = Φτ
P∞ (5.59)Bemærk, at hvis der for et givet tidspunkt, s, gælder at ms = m∞, Ps = P∞, da er denpågældende stokastiske pro es stationær. Modsat gælder, at asymptotisk stabile pro esserasymptotisk nærmer sig stationære forhold.Ligning 5.58 til bestemmelse af den asymptotiske varians er en Lyapunovligning. Sam-menlign med lyaponovligningen, der optræder i forbindelse med stabilitet [side 73 (1.322),bestemmelse af styr- og observerbarhedsgramianer [side 76 (1.344) og [side 82 (1.375).
211Udvidelse: 10 Betragt den tilsvarende tidskontinuerte (t er her kontinuert) pro esmodel, derformelt kan skrives som:xt = Axt + vt xt0 ∈ N(m0, P0) (5.60)hvor vt (formelt) er hvid støj med intensiteten R1. Ovenstående er en kort skrivemåde for:
dxt = Axtdt + dvt (5.61)hvor:dvt ∈ N(0, R1dt) (5.62)hvilket igen er grænsen (∆t → 0) for:
∆xt = Axt∆t + ∆vt (5.63)hvor:∆vt ∈ N(0, R1∆t) (5.64)Når A er konstant (dvs. under tidsinvariante forhold) gælder der at:
mt = Amt mt0 = m0 (5.65)ogRx(s, t) = eA(s−t)Pt (5.66)hvor:
Pt = APt + PtA⊤ + R1 (5.67)I kontinuert tid gælder tilsvarende at hvis systemet er asymptotisk stabilt vil fordelingen konvergeremod:
xt ∈ N(0, P∞) (5.68)hvor P∞ kan ndes som den positiv denitte løsning til:AP∞ + P∞A⊤ + R1 = 0 (5.69)der betegnes som den tidskontinuerte Lyapunovligning. 2Eksempel: 5.1 Betragt en første ordens pro es givet ved:
xt+1 = axt + vt (5.70)hvor vt er en sekvens af uafhængige N(0, r1)-fordelte stokastiske variable, der er uafhængige af xsfor s ≤ t. Lad yderligere xt0 ∈ N(m0, P0) og lad t = t − t0. Da følger direkte fra sætning 5.7, atmiddelværdien har en udvikling efter rekursionen:m(t + 1) = am(t) m(0) = m0 (5.71)eller at:
m(t) = atm0 (5.72)For variansfunktionen gælder at:p(t + 1) = a2p(t) + r1 p(t0) = p0 (5.73)eller at:
p(t) = a2tp0 +1 − a2t
1 − a2r1 (5.74)Yderligere er:
r(s, t) = as−tp(t) for s ≥ t (5.75)Hvis |a| < 1 og t0 → −∞ da er:m(t) = 0 P (t) =
r1
1 − a2(5.76)og
rx(t + τ, t) = rx(τ) =a|τ |
1 − a2r1 (5.77)Pro essen bliver med andre ord svagt stationær, idet middelværdien er konstant og kovariansfunk-tionen kun er en funktion af tidsforskellen. Idet pro essen er en normalpro es er den yderligerestrengt stationær. 2
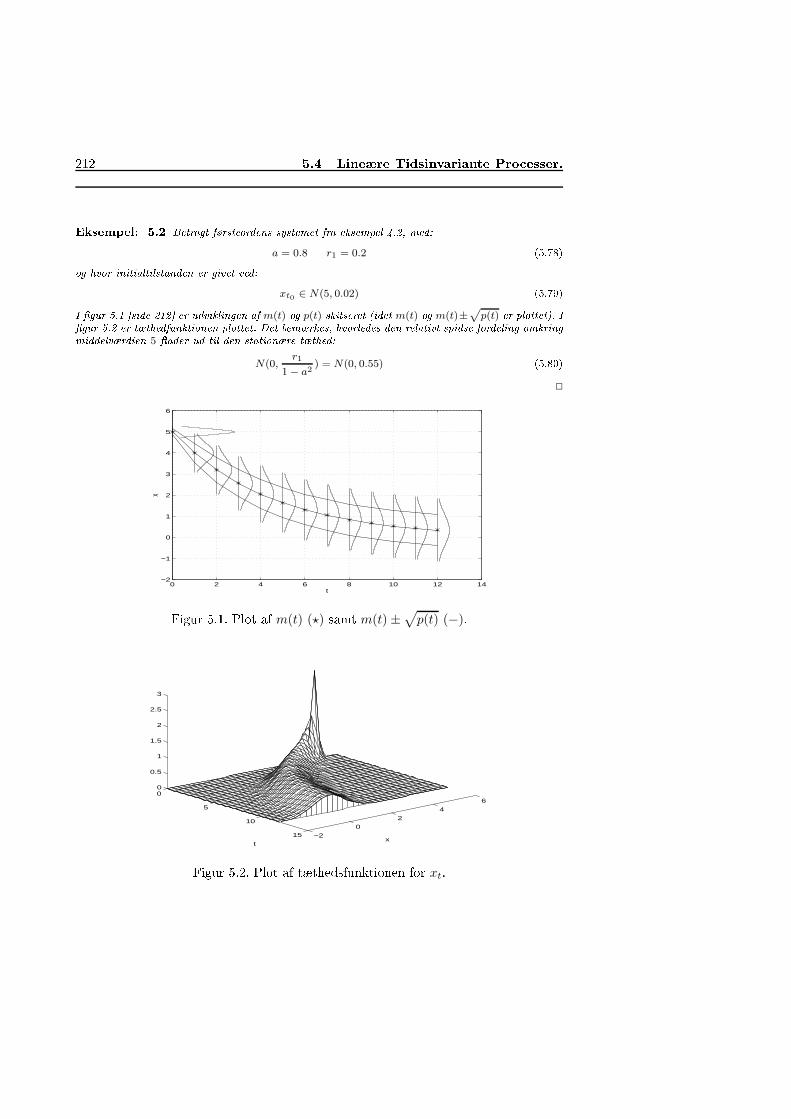
212 5.4 Lineære Tidsinvariante Pro esser.Eksempel: 5.2 Betragt førsteordens systemet fra eksempel 4.2, med:a = 0.8 r1 = 0.2 (5.78)og hvor initialtilstanden er givet ved:
xt0 ∈ N(5, 0.02) (5.79)I gur 5.1 [side 212 er udviklingen af m(t) og p(t) skitseret (idet m(t) og m(t)±p
p(t) er plottet). Igur 5.2 er tæthedfunktionen plottet. Det bemærkes, hvorledes den relativt spidse fordeling omkringmiddelværdien 5 ader ud til den stationære tæthed:N(0,
r1
1 − a2) = N(0, 0.55) (5.80)
2
0 2 4 6 8 10 12 14−2
−1
0
1
2
3
4
5
6
x
tFigur 5.1. Plot af m(t) (⋆) samt m(t) ±√
p(t) (−).0
5
10
15 −2
0
2
4
6
0
0.5
1
1.5
2
2.5
3
xtFigur 5.2. Plot af tæthedsfunktionen for xt.
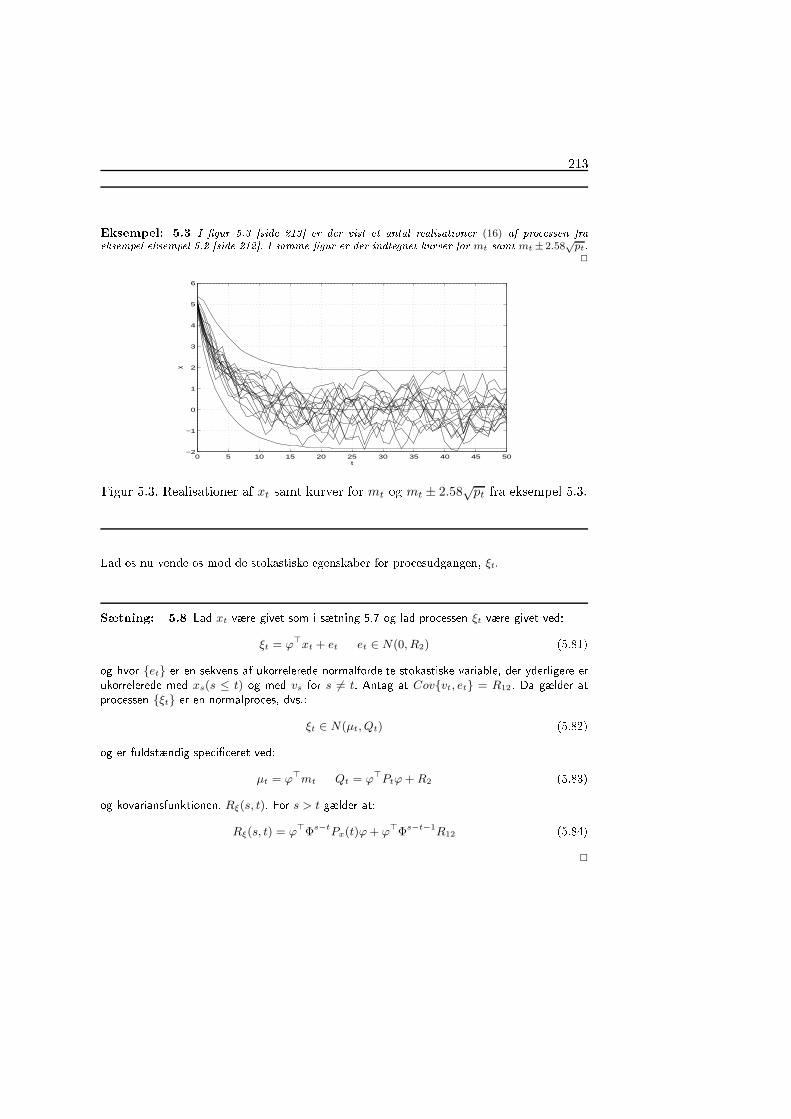
213Eksempel: 5.3 I gur 5.3 [side 213 er der vist et antal realisationer (16) af pro essen fraeksempel eksempel 5.2 [side 212. I samme gur er der indtegnet kurver for mt samt mt ±2.58√
pt.2
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2
3
4
5
6
x
tFigur 5.3. Realisationer af xt samt kurver for mt og mt ± 2.58√
pt fra eksempel 5.3.Lad os nu vende os mod de stokastiske egenskaber for pro esudgangen, ξt.Sætning: 5.8 Lad xt være givet som i sætning 5.7 og lad pro essen ξt være givet ved:ξt = ϕ
⊤xt + et et ∈ N(0, R2) (5.81)og hvor et er en sekvens af ukorrelerede normalfordelte stokastiske variable, der yderligere erukorrelerede med xs(s ≤ t) og med vs for s 6= t. Antag at Covvt, et = R12. Da gælder atpro essen ξt er en normalpro es, dvs.:ξt ∈ N(µt, Qt) (5.82)og er fuldstændig spe i eret ved:
µt = ϕ⊤mt Qt = ϕ
⊤Ptϕ+R2 (5.83)og kovariansfunktionen, Rξ(s, t). For s > t gælder at:
Rξ(s, t) = ϕ⊤Φs−t
Px(t)ϕ+ ϕ⊤Φs−t−1
R12 (5.84)2

214 5.4 Lineære Tidsinvariante Pro esser.Bevis: Sætningens første del følger simpelt af sætning 3.21 [side 150. Lad ξt = ξt −µt. Daer (for s > t):
Rξ(s, t) = E
n
ξsξ⊤t
o (5.85)= E
n
(ϕ⊤xs + es)(x
⊤t ϕ+ e
⊤t )oEndvidere er xs givet [side 210 (5.50), [side 210 (5.51) og [side 210 (5.52), hvorved:
Rξ(s, t) = E
n
(ϕ⊤ ˆΦs−txt + Wv
c (s− t)V s−1
˜
+ es) (5.86)×(xtϕ+ e
⊤t )o
= ϕ⊤Φs−t
Ptϕ+ ϕ⊤Φs−t−1
R12
2Eksempel: 5.4 Betragt en andenorden pro es givet ved:xt+1 =
»
1.8 1−0.95 0
–
xt +
»
10
–
vt (5.87)hvor:x0 ∈ N
„»
50
–
;
»
0.1 00 0.1
–« og vt ∈ N(0, 0.05) (5.88)Udgangen af pro essen er:yt =
`
1 0´
xt (5.89)I gur 5.4 er en realisation af yt, µt samt µt ± 2.58√
Qt plottet. 2
0 50 100 150 200 250 300 350 400 450 500−20
−10
0
10
20
y
t
0 10 20 30 40 50 60 70 80 90 100−20
−10
0
10
20
y
t
Figur 5.4. Plot af en realisation fra eksempel 5.4

215Eksempel: 5.5 Lad os igen betragte forholdene fra eksempel 4.1 [side 175 hvor en påvirkning(f.eks. en referen e) udvikler sig som en stokastisk trinfunktion (en realisation er afbildet i gur 4.4[side 175 og i gur 5.5 [side 215). Denne udvikling kan modelleres ved at ændringen normalt ernul, men ved tilfældige tidspunkter antager en stokastisk værdi. Dvs. at:xt+1 = xt + vt xt0 ∈ F(m0, P0) (5.90)
ξt = xt (5.91)Fordelingen af vt kan f.eks. være en ompoundfordeling som angivet i eksempel 3.8 [side 126. Dvs.at vt er givet ved tæthedsfunktionen:fv(x) = ηδ(x) + (1 − η)
1
σφN (
x − µ
σ) (5.92)hvor δ(x) og φN (x) angiver Dira -funktionen og den normaliserede normale tæthedfunktion, hen-holdsvis. Denne tæthedsfunktion er afbildet i gur 3.4 [side 127. I så fald er vt ∈ F(0, ησ2). Bemærk,at vt i dette tilfælde ikke er normalfordelt. Vores resultater er derfor kun gældende for de to førstemomenter (dvs. middelværdi, varians og kovarians). For denne pro es gælder at:
mt+1 = mt mt0 = m0 (5.93)pt+1 = pt + ησ2 pt0 = p0 (5.94)I gur 5.5 [side 215 er udviklingen af mt og ±√
pt afbildet tillige med en realisering af pro essen.Følgende værdier er anvendt:m0 = 0 p0 = 0 σ2 = 1 η = 0.05 (5.95)Bemærk, at fordelingen ikke er normaltfordelt, hvorfor ±√
pt kun er en approximation af 99%kondensintervallet for xt. Bemærk, at denne pro es ikke er stationær (end ikke i asymptoten). Vi
0 10 20 30 40 50 60 70 80 90 100−6
−4
−2
0
2
4
6
x
t
Stokastisk trinfunktion
Figur 5.5. Realisation af stokastisk trinfunktion fra eksempel 5.5 [side 215.kan relativt let bestemme at der eksternt gælder:ξt =
1
1 − q−1vt (5.96)Denne type pro es betegnes derfor ofte i daglig tale som integreret hvid støj. 2

216 5.5 Eksterne Pro esmodellerEksempel: 5.6 I eksempel 4.2 [side 175 betragtede vi en realisation (i gur 4.5 [side 175) afen påvirkning, der udviklede sig som en stokastisk rampefunktion. En sådan pro es kan modelleressom en summeret udgave af den stokastiske trinfunktion fra eksempel 5.5 [side 215. Dvs. pro essenkan modelleres af følgende andenordens model:zt+1 = zt + vt (5.97)
zt+1 = zt + Tszt (5.98)hvor vt er fordelt efter en ompoundfordeling som angivet i eksempel 5.5 [side 215. Modellen kanogså skrives som:xt+1 =
»
1 0Ts 1
–
xt +
»
vt
0
– (5.99)ξt =
`
0 1´ (5.100)Vi kan også angive en ekstern beskrivelse:
ξt =Ts
(1 − q−1)2vt (5.101)Også i dette tilfælde er pro essen ikke stationær. Udviklingen af mt og pt kan let bestemmes ud frasætning 5.7 [side 210 og sætning 5.8 [side 213. 2
0 10 20 30 40 50 60 70 80 90 100−20
−15
−10
−5
0
5
10
15
20
x
t
Stokastisk rampefunktion
Figur 5.6. Realisation af en referen e der udvikler sig som en stokastisk rampefunk-tion. Bemærk inddelingen af ordinataksen.5.5 Eksterne Pro esmodellerI det forrige kapitel så vi, hvorledes vi kunne udvide tilstandsbegrebet fra den deterministiskesystemteori. Dette resulterede i interne stokastiske pro esmodeller. Vi analyserede endvideredet tilfælde, at pro esudgangen, ξt, var fremkommet som en støjfyldt linearkombination afmarkovpro essen, xt. I det forrige kapitel angav vi, at hvis egenværdierne i Φ-matri en liggerindenfor enheds irklen nærmer pro essen sig asymptotisk til stationære forhold.Vi vil nu i dette kapitel betragte nogle eksterne modeller for stationære pro esser. Det vilsige, at vi ikke interesserer os for hvad der foregår internt i pro essen. Antag, at ξt er ensvagt stationær pro es, der er givet ved:
ξt + d1ξt−1 + ...+ dnξt−n = et + c1et−1 + ...+ cnet−n (5.102)

217hvor et er en svagt stationær pro es med:E
n
et
o
= 0 re(τ ) = σ2δτ =
σ2 for τ = 00 ellers (5.103)Pro essen, ξt, kan med skifteoperatoren, q−1, skrives på formen:
D(q−1)ξt = C(q−1)et (5.104)hvor:D(q−1) = 1 + d1q
−1 + ...+ dnq−n (5.105)
C(q−1) = 1 + c1q−1 + ...+ cnq
−n (5.106)Dette kan endvidere skrives som:ξt = H(q)et =
C(q−1)
D(q−1)et =
∞X
i=0
hiet−i = ht ⋆ et (5.107)hvor ⋆ symboliserer en foldning mellem de indgående signaler. Det kan vises, at en nødvendigbetingelse for (svagt) stationaritet af ξt, er at nulpunkterne til:D(z) = z
nD(z−1) = z
n + d1zn−1 + ...+ dn (5.108)ligger indenfor enheds irklen.Lad os herefter indlede med, at betragte to spe ielle typer pro esmodeller, nemlig de såkaldteMA- og AR-pro esser (Moving Average- og Autoregressive pro esser). For MA-pro essen harvi følgende sætning..Sætning: 5.9 Lad ξt være en MA-pro es:
ξt = C(q−1)et (5.109)hvor et er en hvid støjpro es med middelværdi nul og varians σ2. Da gælder at:rξ(τ ) = σ
2
8
<
:
1 + c21 + c22 + ...+ c2n for τ = 0c|τ | + c|τ |+1c1 + ...+ cncn−|τ | for 1 ≤ |τ | ≤ n
0 ellers (5.110)rξe(τ ) = σ
2
8
<
:
1 for τ = 0cτ for 0 < τ ≤ n
0 ellers (5.111)2Bevis: Direkte beregninger giver for τ ≥ 0:
rξ(τ ) = E
n
ξt+τξt
o (5.112)= E
n
(et+τ + c1et+τ−1 + ...+ cnet+τ−n) (5.113)×(et + c1et−1 + ...+ cnet−n)
o (5.114)= σ
2
8
<
:
1 + c21 + c22 + ...+ c2n for τ = 0c|τ | + c|τ |+1c1 + ...+ cncn−|τ | for 1 ≤ |τ | ≤ n
0 ellers (5.115)

218 5.5 Eksterne Pro esmodellerSætningens anden del følger at:rξe(τ ) = E
n
ξt+τet
o (5.116)= E
n
(et+τ + c1et+τ−1 + ...+ cnet+τ−n) et
o (5.117)2Eksempel: 5.7 Antag at ξt er en pro es givet ved:
ξt = et − et−1 (5.118)hvor et er en sekvens af uafhængige N(0, σ2)-fordelte stokastiske variable. Da giver sætning 5.9direkte at:rξ(0) = 2σ2 rξ(±1) = −σ2 rξ(τ) = 0 for τ 6∈ −1, 0, 1 (5.119)
2Eksempel: 5.8 Betragt en MA-pro es givet ved:ξt = (1 − 0.5q−1 − 0.24q−2)et (5.120)hvor et ∈ Niid(0, 0.768). Kovarians- og krydskovariansfunktionen er angivet i gur 5.7 [side 218.
2
−10 −5 0 5 10−1
−0.5
0
0.5
1
1.5
tau
r
Autokovariansfunktion (MA)
−10 −5 0 5 10−1
−0.5
0
0.5
1
1.5
tau
r
Krydskovariansfunktion (MA)
−10 −5 0 5 10−1
−0.5
0
0.5
1
1.5
tau
r
Autokovariansfunktion (AR)
−10 −5 0 5 10−1
−0.5
0
0.5
1
1.5
tau
r
Krydskovariansfunktion (AR)
Figur 5.7. Kovariansfunktioner (Auto og Kryds) for MA-pro es fra eksempel eksempel5.8 [side 218 og for AR-pro es fra eksempel 4.16 [side 195.Bemærk, at for en MA-pro es er rξ(τ ) kun forskellig fra nul i intervallet −n ≤ τ ≤ n.Krydskovariansfunktionen er kun forskellig fra nul i intervallet 0 ≤ τ ≤ n. Lad os nubetragte en pro es med helt andre egenskaber, nemlig AR-pro essen.
219Sætning: 5.10 Lad ξt være givet ved AR-pro essen:D(q−1)ξt = et (5.121)hvor et er en hvid støjpro es med middelværdi nul og varians σ2. Da gælder at den symmetriskefunktion rξ(τ ) (dvs. at: rξ(−τ ) = rξ(τ )) opfylder at:
D(q−1)rξ(τ ) = σ2δτ for τ ≥ 0 (5.122)og at den kausale funktion, rξe(τ ) (rξe(−τ ) = 0 for τ > 0) opfylder at:
D(q−1)rξe(τ ) = σ2δτ (5.123)
2Bevis: AR-pro essen kan skrives på formen:ξt = −d1ξt−1 − d2ξt−2 − ... − dnξt−n + et (5.124)Hvis vi multipli erer med ξt−τ (τ ≥ 0) på begge sider af lighedstegnet:
ξtξt−τ = −d1ξt−1ξt−τ − d2ξt−2ξt−τ − ...− dnξt−nξt−τ + etξt−τ (5.125)og danner forventningsværdierne, får vi for τ ≥ 1 at:rξ(τ ) = −d1rξ(τ − 1) − d2rξ(τ − 2) − ...− dnrξ(τ − n) + 0 (5.126)og for τ = 0 at:
rξ(0) = −d1rξ(1) − d2rξ(2) − ...− dnrξ(n) + σ2 (5.127)Resultatet for krydskovariansfunktionen ndes på samme måde ved at multipli ere [side 219(5.124) med et−τ og danne forventningen. 2Eksempel: 5.9 Lad os i dette eksempel betragte AR-pro essen:
(1 − 1.2q−1 + 0.4q−2)ξt = et (5.128)hvor et ∈ Niid(0, 0.22). Kovarians- og krydskovariansfunktionen er angivet i gur 5.7 [side 218.2Det bemærkes at den symmetriske funktion, rξ(τ ), for τ ≥ 0 dør ud præ ist som impulss-reponsen (dvs. som D(q−1)r = 0). Til bestemmelse af de n + 1 første værdier i kovarians-funktionen for en AR-pro es har vi ligningssystemet:
rξ(0) +d1rξ(1) +d2rξ(2) +...+ +dnrξ(n) = σ2
rξ(1) +d1rξ(0) +d2rξ(1) +...+ +dnrξ(n− 1) = 0rξ(2) +d1rξ(1) +d2rξ(0) +...+ +dnrξ(n− 2) = 0... ... ... . . . ... ...
rξ(n− 1) +d1rξ(n− 2) +d2rξ(n− 3) +...+ +dnrξ(1) = 0rξ(n) +d1rξ(n− 1) +d2rξ(n− 2) +...+ +dnrξ(0) = 0

220 5.5 Eksterne Pro esmodellerDe resterende værdier af kovariansfunktionen kan bestemmes rekursivt af:D(q−1)rξ(τ ) = 0 (5.129)dvs. at for τ > n:
rξ(τ ) = −d1rξ(τ − 1) − d2rξ(τ − 2) − ... − dnrξ(τ − n) (5.130)Hvis man i stedet arbejder med korrelationsfunktionen:ρξ(τ ) =
rξ(τ )
rξ(0)(5.131)kan vi omskrive ovenstående ligningssystem til:
2
6
6
6
6
6
4
1 ρξ(1) ρξ(2) ... ρξ(n− 1)ρξ(1) 1 ρξ(1) ... ρξ(n− 2)ρξ(2) ρξ(1) 1 ... ρξ(n− 3)... ... ... . . . ...
ρξ(n− 1) ρξ(n− 2) ρξ(n− 3) ... 1
3
7
7
7
7
7
5
2
6
6
6
6
6
4
d1
d2
d3...dn
3
7
7
7
7
7
5
(5.132)=
2
6
6
6
6
6
4
−ρξ(1)−ρξ(2)−ρξ(3)...−ρξ(n)
3
7
7
7
7
7
5
(5.133)der kaldes for Yule-Walker ligningerne. Dette kan anvendes til bestemmelse af koe ienternei D-polynomiet (i en AR-pro es) ud fra kendskabet til (en eventuelt estimeret) korrelations-funktion.Lad os nu efter disse indledende betragtninger fokusere på det generelle tilfælde, d.v.s. hvorpro essen er givet ved:D(q−1)ξt = C(q−1)et (5.134)Sætning: 5.11 Lad den svagt stationære pro es, ξt, være som angivet ovenfor. Da gælderat krydskovariansfunktionen rξe(τ ) er givet ved:
rξe(τ ) = σ2hτ (5.135)eller ved:
D(q−1)rξe(τ ) = C(q−1)σ2δτ (5.136)hvor hτ er impulsresponsen for C
D. 2Bevis: Vi bemærker først, at E
n
ξt
o
= 0 og dermed at:rξe(τ ) = E
n
ξt+τet
o
= E
n
ξtet−τ
o
= reξ(−τ ) (5.137)

221Hvis pro esligningen:ξt + d1ξt−1 + ... + dnξt−n = et + c1et−1 + ...+ cnet−n (5.138)multipli eres med et−τ
ξtet−τ + d1ξt−1et−τ + ...+ dnξt−net−τ = etet−τ + c1et−1et−τ + ...+ cnet−net−τ (5.139)og forventningen dannes, fås at:rξe(τ ) + d1rξe(τ − 1) + ... + dnrξe(τ − n) =
8
<
:
σ2 for τ = 0σ2cτ for 0 ≤ τ ≤ n
0 ellers (5.140)Dermed er:D(q−1)rξe(τ ) = C(q−1)σ2
δτ (5.141)eller rξe(τ ) = σ2hτ , hvor hτ er impulsresponsen. 2Bemærk, at rξe(τ ) = 0 for τ < 0, idet hτ er impulsresponsen for et kausalt system. Forat undgå misforståelser i det følgende indføres det inverterede impulsvar, ~τ , deneret ved~τ = h−τ . Der gælder for kausale systemer at ~τ = 0 for τ > 0. Endvidere gælder der at:
q−m
~τ = ~τ−m = hm−τ (5.142)Med denne introduktion kan vi anføre følgende sætning.Sætning: 5.12 Lad den svagt stationære pro es, ξt, være som angivet ovenfor. Da gælderat kovarians funktionen rξ(τ ) er givet ved:rξ(τ ) = σ
2hτ ⋆ ~
⊤τ (5.143)eller ved:
D(q−1)rξ(τ ) = σ2C(q−1)~⊤
τ (5.144)2Bevis: Det bemærkes først at:
rξ(τ ) = E
n
ξt+τξt
o
= E
n
ξtξt−τ
o
= rξ(−τ ) (5.145)Når pro esligningen multipli eres med ξt−τ får vi for τ ≥ 0 at:ξtξt−τ + d1ξt−1ξt−τ + ...+ dnξt−nξt−τ =
etξt−τ + c1et−1ξt−τ + ...+ cnet−nξt−τder efter forventningsværdidannelse giver at:rξ(τ ) + d1rξ(τ − 1) + ...+ dnrξ(τ − n) =
reξ(τ ) + c1reξ(τ − 1) + ...+ cnreξ(τ − n)
222 5.5 Eksterne Pro esmodellerD.v.s. at:D(q−1)rξ(τ ) = C(q−1)reξ(τ ) (5.146)Da nu:
rξe(τ ) = σ2hτ (5.147)er:
reξ(τ ) = σ2h−τ = σ
2~⊤τ (5.148)og dermed er rξ(τ ) = σ2hτ ⋆ ~
⊤τ . q.e.d. 2Det bemærkes igen at kovariansfunktionen for τ ≥ n opfylder den karakteristiske ligning,dvs.:D(q−1)rξ(τ ) = 0 for τ ≥ n+ 1 (5.149)hvilket igen vil sige at rξ(τ ), der er symmetrisk, dør ud på samme måde som impulssvaret.Dette kan let indses, idet ~τ = 0 for τ ≥ 1. I lighed med forholdene for AR-pro esserne kande n+ 1 første værdier af kovariansfunktionen bestemmes ved udskrive (5.144)
rξ(τ ) + d1rξ(τ − 1) + ...+ dnrξ(τ − n) = (5.150)σ
2(h−τ + c1h1−τ + c2h2−τ + ...+ cnhn−τ ) (5.151)Dvs. vi for τ = 0, 1, ..., n har at:rξ(0) + d1rξ(1) + ...+ dnrξ(n) = σ
2(1 + c1h1 + +...+ cnhn)rξ(1) + d1rξ(0) + ...+ dnrξ(n− 1) = σ
2(c1 + c2h1 + ...+ cnhn−1)rξ(2) + d1rξ(1) + ...+ dnrξ(n− 2) = σ
2(c2 + c3h1 + ...+ cnhn−2)... ...rξ(n) + d1rξ(n− 1) + ...+ dnrξ(0) = σ
2cnEksempel: 5.10 Lad os betragte en første ordens pro es:
ξt + dξt−1 = et + cet−1 et ∈ N(0, σ2) (5.152)Som tidligere nævnt ligger kernen til bestemmelsen af den symmetriske kovariansfunktion i at be-stemme de n + 1 første værdier. For at bestemme disse udregner vi først impulsresponsen (ellermarkovparametrene) der er 1, c − d,−d(c − d), .... Derefter har vi direkte at:r(0) + dr(1) = σ2(1 + c(c − d)) (5.153)
r(1) + dr(0) = σ2c (5.154)hvorved:r(0) =
1 + c2 − 2cd
1 − d2σ2 r(1) =
(1 − cd)(c − d)
1 − d2σ2 (5.155)og videre at:
r(2) = −dr(1) = −d(1 − cd)(c − d)
1 − d2σ2 (5.156)
r(τ) = (−d)τ−1 (1 − cd)(c − d)
1 − d2σ2 for τ ≥ 2 (5.157)Til bestemmelse af kovariansfunktionen for negative værdier af τ kan symmetrien af r(τ) anvendes.
2

223Det er velkendt at kovariansfunktionen og dennes fouriertransformerede, den spektrale tæt-hed, indeholder den samme information om pro essens egenskaber.Sætning: 5.13 Antag af pro essen ξt er svagt stationær og er givet ved:ξt = H(q)et (5.158)hvor et er hvid støj med middelværdi nul og varians σ2. Da er:
Ψξ(z) = H(z)H⊤(z−1)σ2 Ψξe(z) = H(z)σ2 (5.159)Spe ielt gælder at:φξ(ω) = H(ejω)H⊤(e−jω)σ2 ∈ R (5.160)φξe(ω) = H(ejω)σ2 ∈ C (5.161)
2Bevis: Sætningen bygger på sætning 5.11 og 5.12 samt ikke mindst regneregler for rever-sering og foldning i forbindelse med Z-transformationen, der er opsummeret i appendix A.Vi har at:Ψξ(z) = Zrξ(τ ) = Zσ2
hτ ⋆ ~⊤τ = H(z)H⊤(z−1) (5.162)For krydsspektrum gælder at:
Ψξe(z) = Zrξe(τ ) = Zσ2hτ = H(z)σ2 (5.163)
25.6 SpektralfaktoriseringBetragt et tidsinvariant lineært system, der er asymptotisk stabilt. Lad systemets overfø-ringsfunktion være H(z) og lad indgangsignalet være hvid F(0, 1)-fordelt støj. Det følger daaf sætning 5.13, at udgangssignalet er en svag stationær pro es med spektraltæthedenφ(ω) = H(ejω)H(e−jω) = |H(ejω)|2 (5.164)Det er følgelig naturligt, at spørge om alle spektraltæthedsfunktioner φ(ω) er proportionaltmed et produkt af formen |H(ejω)|2. I så fald er det interessant at kunne bestemme overfø-ringsfunktionen H(z). Dette problem kaldes spektralfaktoriseringsproblemet. Lad os indenvi går videre se på et eksempel:Eksempel: 5.11 Betragt to stationære stokastiske pro esser, ξt og ηt. Antag, at vi skalbestemme deres spektrale tætheder. Lad ξt være givet ved:
ξt =1 + 4q−1
1 − 0.5q−1et (5.165)
224 5.6 Spektralfaktoriseringhvor et er hvid støj med varians σ2e . Idet vi anvender (5.164) har vi at:
Ψξ(z) =1 + 4z−1
1 − 0.5z−1
1 + 4z
1 − 0.5zσ2
e (5.166)Bemærk, at 1+4z−1 har et nulpunkt i -4, mens 1+4z har et nulpunkt i -0.25. Tilsvarende eksisterer(i udtrykket for Ψξ(z)) både en pol i 0.5 og i 2. Videre regninger giver at:Ψξ(z) =
4z + 17 + 4z−1
−0.5z + 1.25 − 0.5z−1(5.167)eller:
φξ(ω) =17 + 8cos(ω)
1.25 − cos(ω)σ2
e (5.168)Betragt nu pro essen ηt der er givet ved:ηt =
1 + 0.25q−1
1 − 0.5q−1ǫt (5.169)hvor ǫt er hvid støj med variansen σ2
ǫ . Vi kan hurtigt bestemme den spektrale tæthed til at være:φη(ω) =
1.0625 + 0.5cos(ω)
1.25 − cos(ω)σ2
ǫ (5.170)Det bemærkes, at hvis σ2ǫ = 16σ2
e , da har de to tilsyneladende forskellige pro esmodeller præ isden samme spektrale tæthed. Dette faktum skyldes, at et nulpunkt zi (pol pi) i H(z) genndes somnulpunkt z−1i (pol p−1
i ) i H(z−1). Denne observation kan anvendes til at modellere stationærepro esser (med et rationelt spektrum) som værende frembragt af et lineært system med nulpunkterog poler indenfor stabilitetsområdet, der er drevet af hvid støj. Dette er meget vigtigt idet nulpunkterudenfor stabilitetsområdet i reguleringssammenhæng er meget ubehagelige. 2Hvis det er muligt at spektralfaktorisere en (spektral) tæthed, kan alle stationære stokastiskepro esser modelleres som værende en udgang af et dynamisk system, der påvirkes af hvidstøj. Teorien for dynamiske systemer påvirket af stokastiske forstyrrelser kan derfor simpli- eres betydeligt, idet det vil være tilstrækkeligt at analysere systemer påvirket af hvid støj.Tilsvarende vil simulationer blive simpli eret, idet det i så fald kun er nødvendigt at havegeneratorer til at danne hvide støjpro esser.Det er ikke let at løse spektralfaktoriseringsproblemet generelt. Hvis vi begrænser klassenaf spektre kan problemet let løses. Hvis et dynamisk system har en endelig orden vil overfø-ringsfunktionen H(z) være en rationel funktion i z. Et spektrum er tilsvarende et rationeltspektrum, hvis det kan skrives som en rationel funktion af z. En sådan pro es kaldes for enpro es med rationelt spektrum eller rationel spektraltæthed. Vi anfører her spektralfaktori-seringssætningen.Sætning: 5.14 (Spektralfaktoriseringssætningen) Betragt en stationær stokastiske pro- es med et rationelt spektrum Ψ(z). Da eksisterer en rationel overføringsfunktion H(z) med polerindenfor enheds irklen og nulpunkter ikke udenfor enheds irklen, således at:Ψ(z) = H(z)H⊤(z−1) (5.171)
2

225Bevis: Sætningen følger simpelt af appendix F. 2Bemærk, sætningen kan også formuleres i spektraltætheder, dvs. ved at:φ(ω) = H(ejω)H(e−jω) = |H(ejω)|2 (5.172)Udvidelse: 11 I kontinuert tid vil et rationelt spektrum sige at φ(ω) er en rationel funktion af
ω. For en tidskontinuert, stationær pro es med et rationalt spektrum eksisterer en overføringsfunk-tion, Hc(s), med poler i venstre halvplan og nulpunkter ikke i højre halvplan, således at:φξ(ω) = Hc(jω)Hc(−jω) = |Hc(jω)|2 (5.173)
2Følgende sætning er en direkte konsekvens af sætning 5.14.Sætning: 5.15 (Repræsentationssætningen) For en given rationel spektraltæthedsfunk-tion φξ(ω) eksisterer der et asymptotisk stabilt lineært dynamisk system med den egenskab atudgangen af systemet er en stationær pro es med spektraltætheden φξ(ω) når indgangen er hvidstøj. 2Bevis: En direkte følge af sætning 5.14. 2Eksempel: 5.12 Antag at en analyse af fysikken af en stokastisk forstyrrelse har resulteret ipro esmodellen for ξt som angivet i eksempel 5.11 Denne model har et nulpunkt klart udenforenheds irklen. Men som det fremgik af eksempel 5.11 kunne vi ligeså vel anvende pro esmodellenηt, fordi denne har den samme korrelationsstruktur (eller samme spektrale tæthed) som pro essenξt. 2Eksempel: 5.13 En modellering af et dynamisk system er resulteret i en overføringsfunktionfra en stokastisk forstyrrelse, ξt, til udgangen, yt, af systemet, (når styresignalet er nul). Denneoverføringsfunktion er:
H1(z) =1 + 5z−1
1 − 0.3z−1(5.174)En undersøgelse af ξt viser at det er en stationær pro es med en rationel spektraltæthed:
φξ(ω) =0.372 − 0.256cos(ω)
1 − 0.94cos(ω)(5.175)Med henblik på (f. eks. en minimalvarians)regulering af systemet vil vi modellere udgangen (for
ut = 0) som ltreret hvid støj. Der eksisterer ere fremgangsmåder, nogle mere elegante end andre.I dette eksempel lægges vægt på at illustrere nogle af teknikkerne.Ifølge repræsentationssætningen kan vi modellere ξt som værende fremkommet ved ltrering af ethvidt støjsignal ηt gennem et første ordens system med overføringsoperatoren:Hξ(q) =
1 + cq−1
1 + dq−1(5.176)

226 5.6 SpektralfaktoriseringIdet vi anvender Eulers formel kan vi skrive:φξ(ω) =
(1 + ce−jω)(1 + cejω)
(1 + de−jω)(1 + dejω)σ2
η =1 + c2 + 2c cos(ω)
1 + d2 + 2d cos(ω)σ2
η (5.177)Heri identi erer vi til bestemmelse af d og c ligningerne:σ2
η
1 + c2
1 + d2= 0.372 (5.178)
σ2η
2c
1 + d2= −0.256 (5.179)
2d
1 + d2= −0.94 (5.180)(5.181)der løses mht. d, c og σ2
η. Resultatet er:d = −0.7 c = −0.4 for σ2
η = 3.0 (5.182)eller at:ξt =
1 − 0.4q−1
1 − 0.7q−1ηt ηt ∈ F(0, 3.0) (5.183)Vi har nu (for ut = 0) at:
yt =1 + 5q−1
1 − 0.3q−1
1 − 0.4q−1
1 − 0.7q−1ηt (5.184)eller at:
(1 − q−1 + 0.21q−2)yt = (1 + 4.6q−1 − 2q−2)ηt (5.185)Nu indeholder overføringsfunktionen fra ηt til udgangen et nulpunkt udenfor enheds irklen. Dette ersom vi vil se i det senere ikke særligt heldigt. Men ifølge repræsentationssætningen kan vi modellereMA-pro essen:vt = (1 + 4.6q−1 − 2q−2)ηt (5.186)(d.v.s. højre side) som en MA-pro es uden nulpunkter udenfor enheds irklen. Vi beregner autoko-variansfunktionen for vt, og får ved anvendelse af sætning 5.9 at:
rv(0) = 3.0(12 + 4.62 + (−2)2) = 78.5 (5.187)rv(1) = 3.0(4.6 − 4.6 × 2) = −13.8 (5.188)rv(2) = 3.0(−2) = −6.0 (5.189)rv(τ) = 0 for |τ | ≥ 0 (5.190)Vort mål er at modellere vt på en sådan måde at nulpunkterne er beliggende indenfor stabilitets-området. Vi skal følgelig bestemme koe ienterne i:
vt = (1 + θ1q−1 + θ2q−2)et et ∈ F(0, σ2) (5.191)Igen ved anvendelse af sætning 5.9 har vi ligningssystemet:rv(0) = σ2(1 + θ2
1 + θ22) = 78.5 (5.192)
rv(1) = σ2(θ1 + θ1θ2) = −13.8 (5.193)rv(2) = σ2θ2 = −6.0 (5.194)rv(τ) = 0 for |τ | ≥ 3 (5.195)

227med løsningen:vt = (1 − 0.2q−1 − 0.08q−2)et et ∈ F(0, 0.75) (5.196)Dermed kan vi for ut = 0 modellere systemet med:
yt =1 − 0.2q−1 − 0.08q−2
1 − q−1 + 0.21q−2et (5.197)Bemærk, at det er meget nemmere blot at spejle (i enheds irklen) nulpunkterne udenfor enheds irk-len. Opgaven er da redu eret til at bestemme variansen for et, hvilket kan ske ved løsning af denførste ligning, idet θi, i = 1, 2 kendes. 2Sætning 5.15 er en meget vigtig sætning. Den impli erer nemlig, at når analysen er begrænsettil stationære pro esser med rationelle spektraltætheder, kan sådanne pro esser modelleressom dynamiske systemer, der drives af hvid støj. Det betyder igen, at analysen kan begrænsestil en analyse af dynamiske systemer med hvide påvirkningssignaler.Eksempel: 5.14 Lad os betragte en pro es, der består af to additive bidrag, dvs.
ξt =C1(q−1)
A1(q−1)ηt +
C2(q−1)
A2(q−1)ζt (5.198)hvor ηt ∈ Niid(0, σ2
η) og ζt ∈ Niid(0, σ2ζ ). Støjpåvirkningerne ηt og ζt er uafhængige. For dennepro es gælder der at:
ξt =C1(q−1)A2(q−1)ηt + C2(q−1)A1(q−1)ζt
A1(q−1)A2(q−1)(5.199)Pro essen kan modelleres af:
ξt =C(q−1)
A1(q−1)A2(q−1)et (5.200)hvor C(q−1) og σ2
e er fundet ved spektralfaktorisering (se iøvrigt appendix F), dvs. som løsning til:σ2
eC(z−1)C(z) = Ψ(z) (5.201)Her er:Ψ(z) = C1(z−1)A2(z−1)A2(z)C1(z)σ2
η
+ C2(z−1)A1(z−1)A1(z)C2(z)σ2ζI appendix F der der angivet en numerisk metode til løsning af (5.201). 2Eksempel: 5.15 Lad os nu betragte et spe ialtilfælde af eksempel 5.14, nemlig en pro es, derbestår af hvid støj overlejret af drift, dvs.:
ξ = ηt +1
1 − q−1ζt (5.202)hvor ηt og ζt opfylder betingelserne fra eksempel 5.14. Vi har at:
Ψ(z) = (1 − z−1)(1 − z)σ2η + σ2
ζ (5.203)= −σ2
ηz−1 + (σ2ζ + 2σ2
η) − σ2ηz (5.204)

228 5.6 SpektralfaktoriseringVi kan (vha. numeriske metoder som f.eks. angivet i appendix F) nde løsningen til (5.201), dvs.nde c i:C(q−1) = 1 − cq−1 (5.205)samt modelvariansen σ2
e . I gur 5.8 [side 228 (ø.tv.) er nulpunktet (dvs. c) afhængighed af σ2ζ = Vd(for fastholdt σ2
η = 1). Samtidig er modelvariansen (dvs. σ2e) afhængighed afbildet (ø.th.). Bemærk,at ved forsvindende drift (σ2
ζ → 0) vil C(q−1) = 1−q−1 og dermed an elere integratoren. Nederst igur 5.8 [side 228 er angivet to realisationer for σ2η = 1, σ2
ζ = 0.1 og σ2η = 0.1, σ2
ζ = 1, henholdsvis.2
0 0.5 10.2
0.4
0.6
0.8
1
Nulpk
t.
Vd
C−polynomie
0 0.5 11
1.5
2
2.5
3va
rians
Vd
Modelvarians
0 50 100 150 200−10
−5
0
5V=1, Vd=0.1
y
sample no.0 50 100 150 200
−5
0
5
10
15
20V=0.1, Vd=1
y
sample no.Figur 5.8. Se eksempel 5.15 [side 228. Nulpunktets (ø.tv.) og modelvarians (ø.th.)afhængighed af driftvariansen. To realisationer med forskelligt forhold mellem drift-og hvidstøjsvarians.
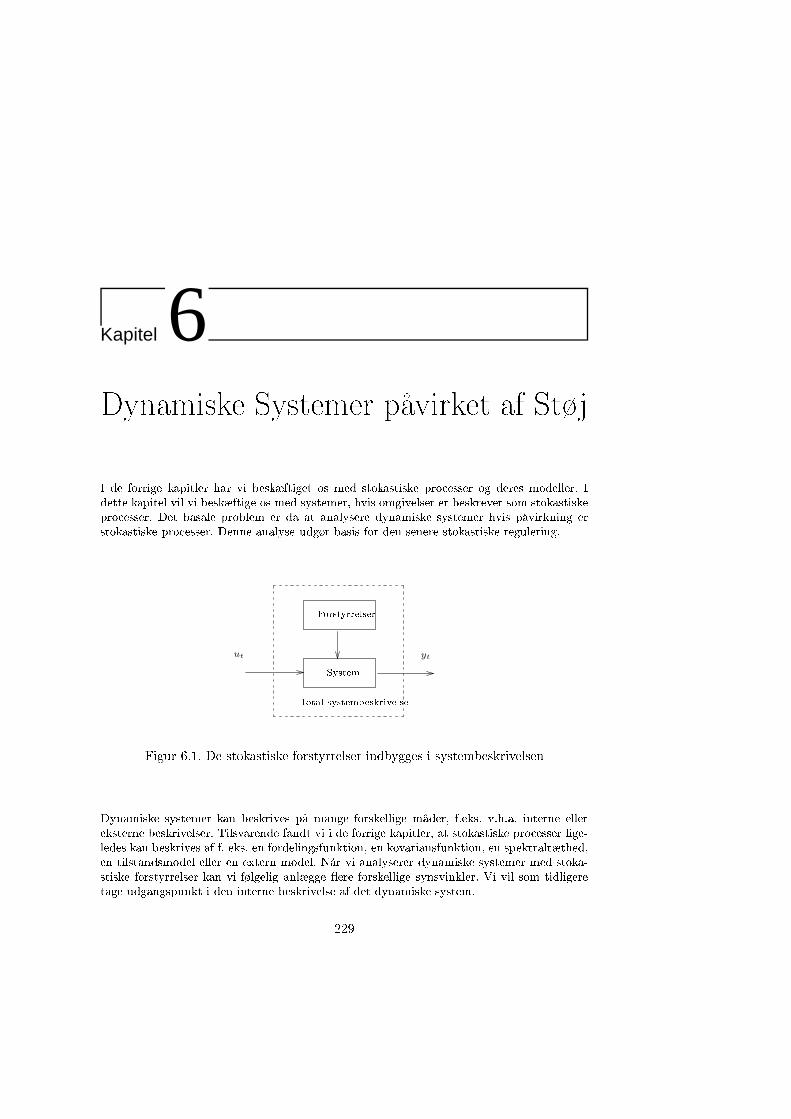
Kapitel 6Dynamiske Systemer påvirket af StøjI de forrige kapitler har vi beskæftiget os med stokastiske pro esser og deres modeller. Idette kapitel vil vi beskæftige os med systemer, hvis omgivelser er beskrevet som stokastiskepro esser. Det basale problem er da at analysere dynamiske systemer hvis påvirkning erstokastiske pro esser. Denne analyse udgør basis for den senere stokastiske regulering.Forstyrrelser
ut ytTotal systembeskrivelseSystemFigur 6.1. De stokastiske forstyrrelser indbygges i systembeskrivelsenDynamiske systemer kan beskrives på mange forskellige måder, f.eks. v.h.a. interne ellereksterne beskrivelser. Tilsvarende fandt vi i de forrige kapitler, at stokastiske pro esser lige-ledes kan beskrives af f. eks. en fordelingsfunktion, en kovariansfunktion, en spektraltæthed,en tilstandsmodel eller en extern model. Når vi analyserer dynamiske systemer med stoka-stiske forstyrrelser kan vi følgelig anlægge ere forskellige synsvinkler. Vi vil som tidligeretage udgangspunkt i den interne beskrivelse af det dynamiske system.229

230 6.1 Intern Systembeskrivelse.6.1 Intern Systembeskrivelse.Antag, at vi har foretaget en fysisk analyse af det dynamiske system, som vi skal regulere.Denne analyse er resulteret i en dierentialligning til beskrivelse af systemet. Vi lineariserereventuelt denne dierentialligning. Hvis vi ønsker at anvende digital teknik til styringsfor-målet kommunikerer vi med systemet gennem A/D og D/A omsættere. Det er da mestformålstjeneligt at beskrive systemet ved hjælp af en tidsdiskret systemmodel:xs(t+ 1) = Φsxs(t) + Γsu(t) (6.1)y(t) = ϕ
⊤s xs(t) + ∆su(t) (6.2)Nu ved vi, at gennem den fysiske analyse og spe ielt i forbindelse med lineariseringen harvi introdu eret en række tilnærmelser. Yderligere bliver selve det fysiske system påvirketaf en lang række forstyrrelser, hvis resultat i xs(t) og y(t), vi ikke på forhånd præ ist kanforudsige. Vi må derfor udvide ovenstående deterministiske model med stokastiske bidrag,nemlig ξ1(t) og ξ2(t). Beskrivelsen resulterer i at:
xs(t+ 1) = Φsxs(t) + Γsu(t) + ξ1(t) (6.3)y(t) = ϕ
⊤s xs(t) + ∆su(t) + ξ2(t) (6.4)som illustreret i gur 6.2.
ytut
Γs
ξ1(t)
Φs
xs(t)ϕT
s
ξ2(t)
Figur 6.2. Blokdiagram for dynamisk system påvirket af de ikke nødvendigvis hvideforstyrrelser ξ1 og ξ2.I det foregående kapitel betragtede vi metoder til at modellere stokastiske pro esser som f.eks. ξ1 og ξ2. Til beskrivelse af pro esserne vil det være mest naturligt at anvende internepro esmodeller, hvorved:x1(t+ 1) = Φ1x1(t) + v1(t) (6.5)ξ1(t) = ϕ
⊤1 x1(t) + e1(t) (6.6)og:
x2(t+ 1) = Φ2x2(t) + v2(t) (6.7)ξ2(t) = ϕ
⊤2 x2(t) + e2(t) (6.8)Her er v1(t), v2(t), e1(t) og e2(t) hvide støjpro esser, der er ukorrelerede med xi(s), i =
1, 2 for s ≤ t. Samler vi tilstandene (dvs. både tilstande svarende til den deterministiskemodellering og tilstande svarende til støjmodellerne) i x(t):x(t) =
8
<
:
xs(t)x1(t)x2(t)
9
=
;
(6.9)

231kan vi samlet beskrive systemet ved:8
<
:
xs(t+ 1)x1(t+ 1)x2(t+ 1)
9
=
;
=
8
<
:
Φs ϕ⊤1 0
0 Φ1 00 0 Φ2
9
=
;
8
<
:
xs(t)x1(t)x2(t)
9
=
;
+
8
<
:
Γs
00
9
=
;
u(t)
+
8
<
:
e1(t)v1(t)v2(t)
9
=
;
y(t) =`
ϕ⊤s 0 ϕ⊤
2
´
8
<
:
xs(t)x1(t)x2(t)
9
=
;
+ ∆su(t) + e2(t) (6.10)Vi kan derfor under en normalfordelingsantagelse i det følgende begrænse analysen af internesystembeskrivelser til:xt+1 = Φxt + Γut + vt vt ∈ Niid(0, R1) xt0 ∈ N(m0, P0) (6.11)
yt = ϕ⊤xt + ∆ut + et et ∈ Niid(0, R2) (6.12)hvor vt og et er uafhængig af xs for s ≤ t. Hvis normalfordelingsantagelsen frafaldes kanvi betragte en situation hvor vt og et er hvide støjpro esser, der er ukorrelerede med xsfor s ≤ t. De drivende støjpro esser et og vt antages at have middelværdi nul. I analysenantager vi, at i startøjeblikket, d.v.s. til t = t0, har xt0 middelværdien m0 og variansen P0.Udvidelse: 12 På helt tilsvarende vis er det muligt i kontinuert tid (tc ∈ R) at begrænseanalysen til systemer af formen:
x(tc) = Ax(tc) + Bu(tc) + v(tc) v(tc) ∈ Niid(0, Σ1) (6.13)med tidsdiskret (t ∈ Z) måling:yt = C⊤x(tT ) + e(tT ) e(tT ) ∈ Niid(0, Σ2) (6.14)Dette system kan (forudsat at styresignalet er konstant i samplingperioden) i diskret tid beskrivesved:xt+1 = Φxt + Γut + vt vt ∈ Niid(0, R1) (6.15)
yt = ϕ⊤xt + et et ∈ Niid(0, R2) (6.16)hvor:Φ = eAT Γ =
Z ⊤
0eAsBds R1 =
Z ⊤
0eAsΣ1(eA⊤s)ds (6.17)
ϕ = C R2 = Σ2 (6.18)Bemærk, at disse matri er kan bestemmes med Matlab kommandoen n2dn. 2Eksempel: 6.1 (Ikke hvid pro estøj) Lad os betragte et skalart første ordens system, derdeterministisk er givet ved:xt+1 = axt + but (6.19)
yt = cxt
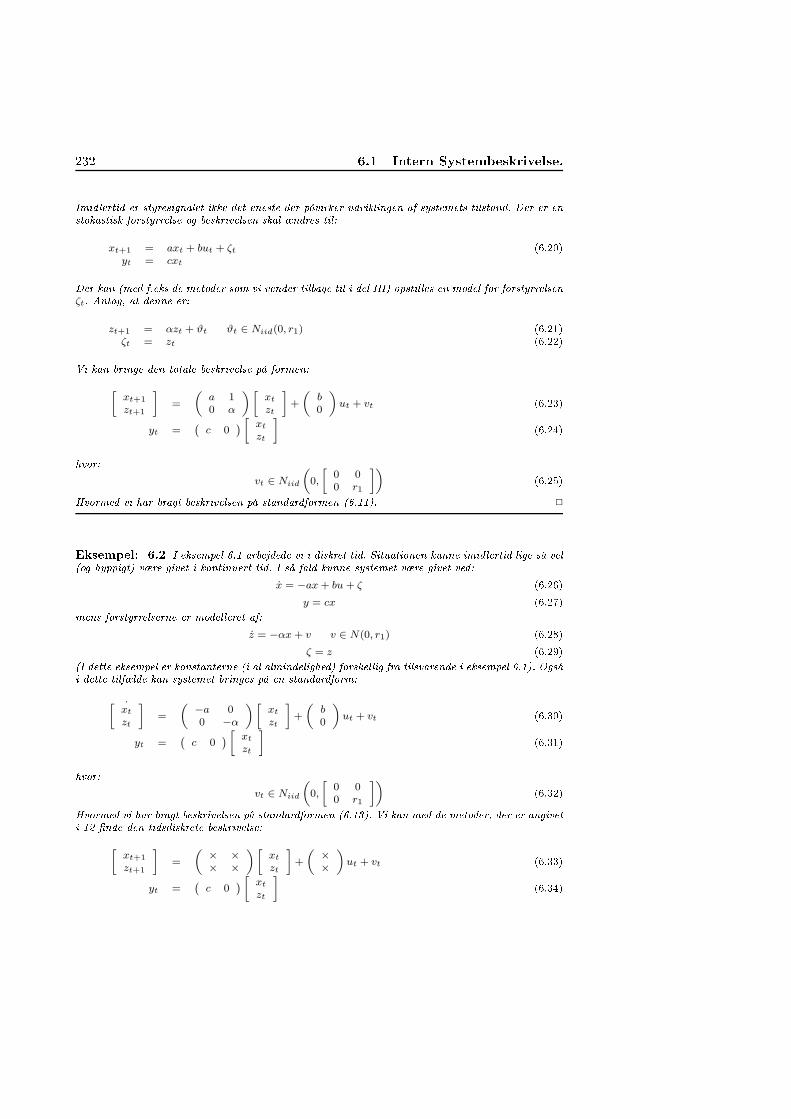
232 6.1 Intern Systembeskrivelse.Imidlertid er styresignalet ikke det eneste der påvirker udviklingen af systemets tilstand. Der er enstokastisk forstyrrelse og beskrivelsen skal ændres til:xt+1 = axt + but + ζt (6.20)
yt = cxtDer kan (med f.eks de metoder som vi vender tilbage til i del III) opstilles en model for forstyrrelsenζt. Antag, at denne er:
zt+1 = αzt + ϑt ϑt ∈ Niid(0, r1) (6.21)ζt = zt (6.22)Vi kan bringe den totale beskrivelse på formen:
»
xt+1
zt+1
–
=
„
a 10 α
«»
xt
zt
–
+
„
b0
«
ut + vt (6.23)yt =
`
c 0´
»
xt
zt
– (6.24)hvor:vt ∈ Niid
„
0,
»
0 00 r1
–« (6.25)Hvormed vi har bragt beskrivelsen på standardformen (6.11). 2Eksempel: 6.2 I eksempel 6.1 arbejdede vi i diskret tid. Situationen kunne imidlertid lige så vel(og hyppigt) være givet i kontinuert tid. I så fald kunne systemet være givet ved:x = −ax + bu + ζ (6.26)
y = cx (6.27)mens forstyrrelserne er modelleret af:z = −αx + v v ∈ N(0, r1) (6.28)
ζ = z (6.29)(I dette eksempel er konstanterne (i al almindelighed) forskellig fra tilsvarende i eksempel 6.1). Ogsåi dette tilfælde kan systemet bringes på en standardform:˙»
xt
zt
–
=
„
−a 00 −α
«»
xt
zt
–
+
„
b0
«
ut + vt (6.30)yt =
`
c 0´
»
xt
zt
– (6.31)hvor:vt ∈ Niid
„
0,
»
0 00 r1
–« (6.32)Hvormed vi har bragt beskrivelsen på standardformen (6.13). Vi kan med de metoder, der er angiveti 12 nde den tidsdiskrete beskrivelse:»
xt+1
zt+1
–
=
„
× ×× ×
«»
xt
zt
–
+
„
××
«
ut + vt (6.33)yt =
`
c 0´
»
xt
zt
– (6.34)

233hvor:vt ∈ Niid
„
0,
»
× ×× ×
–« (6.35)Hvormed vi har bragt beskrivelsen på standardformen (6.11). Bemærk, at den hermed opnåedeinterne beskrivelse indeholder langt ere parametre end den oprindelige tidskontinuerte. Ved atvælge en anden basis for tilstandsrummet (f.eks. vælge en kanonisk form) kan vi beskrive systemetmed et minimal antal parametre. 2Eksempel: 6.3 (Ikke ideel aktuator) Bemærk, at fremgangsmåden i eksempel 6.1 [side 232er den sammen som der anvendes i forbindelse med en ikke ideel aktuator (dvs. en aktuator meddynamik). Betragt et dynamisk system:xt+1 = axt + but (6.36)
yt = cxt (6.37)hvor påvirkningen u eektueres af en aktuator med dynamikken:zt+1 = αzt + βut (6.38)
ut = zt (6.39)Det totale system (reguleringsobjekt) kan beskrives af:»
xt+1
zt+1
–
=
„
a b0 α
«»
xt
zt
–
+
„
0β
«
ut (6.40)yt =
`
c 0´
»
xt
zt
– (6.41)hvor man bemærker ligheden med eksempel 6.1 [side 232. 2Eksempel: 6.4 (Referen e) Lad os igen betragte et simpelt systemxt+1 = axt + but + ζt ζt ∈ Niid(0, r1) (6.42)
yt = cxtder skal styres således at udgangen yt så tæt som muligt følger et referen e signal wt. Vi ønsker ien eller anden forstand (hvilket vi kommer tilbage til) at minimere størrelsen yt = wt − yt. Antag,f.eks. at udviklingen af referen en er givet som i eksempel 5.5 [side 215 (dog med normalfordeltdriftstøj), dvs.:zt+1 = zt + ϑt ϑt ∈ Niid(0, ρ1) (6.43)
wt = ztOgså denne beskrivelse kan bringes på standardformen:»
xt+1
zt+1
–
=
„
a 00 1
«»
xt
zt
–
+
„
b0
«
ut + vt (6.44)yt =
`
−c 1´
»
xt
zt
– (6.45)

234 6.1 Intern Systembeskrivelse.hvor:vt ∈ Niid
„
0,
»
r1 00 ρ1
–« (6.46)Vi vender senere tilbage til hvorledes dette system skal styres. 2Eksempel: 6.5 (Referen e og integralvirkning) Lad os i dette eksempel forsætte eksempel6.4. Det er velkendt at integralvirkning med fordel kan indføres med henblik på at redu ere (om ikkeeliminere) eekten af en konstant forstyrrelse. Man kan således være interesseret i at basere enstyrestrategi på dels en minimering af yt og dels en integralet af samme (egentlig den akkumuleredefejl, idet beskrivelsen er tidsdiskret). Vi kan indføre en ekstra tilstand, en integraltilstand, it ogbeskrive systemet med:2
4
xt+1
zt+1
it+1
3
5 =
0
@
a 0 00 1 01 −1 1
1
A
2
4
xt
zt
it
3
5+
0
@
b00
1
Aut + vt (6.47)»
yt
it
–
=
„
−c 1 00 0 1
«
2
4
xt
zt
it
3
5 (6.48)hvor:vt ∈ Niid
0
@0,
2
4
r1 0 00 ρ1 00 0 0
3
5
1
A (6.49)Styringsopgaven går ud på at minimere en vægtet længde af udgangsvektoren [yt, it]. 2Eksempel: 6.6 (Ikke hvid målestøj) De tre næste eksempler vedrører problemer i forbindelsemed tilstandsestimation. Betragt et dynamisk systemxt+1 = axt + but + ϑt ϑt ∈ Niid(0, r1) (6.50)
yt = cxt + ζtUdgangssignalet yt er her et målesignal. Målestøjen ζt er i dette eksempel ikke hvid, men uafhængigaf ϑt og systemets tilstande. Antag, at målestøjen kan modelleres med:zt+1 = αzt + ξt ξ ∈ N(0, ρ1) (6.51)
ζt = zt + et et ∈ Niid(0, r2)hvor ξt og et er uafhængige af xs og zs for s ≤ t. Denne situation er vi i stand til at modelleremed:»
xt+1
zt+1
–
=
„
a 00 α
«»
xt
zt
–
+
„
b0
«
ut + vt (6.52)yt =
`
c 1´
»
xt
zt
–
+ et et ∈ N(0, r2) (6.53)hvor:vt ∈ Niid
„
0,
»
r1 00 ρ1
–« (6.54)Her er ξt og et uafhængige af xs og zs for s ≤ t. Hvormed vi har bragt beskrivelsen på standardfor-men (6.11). 2
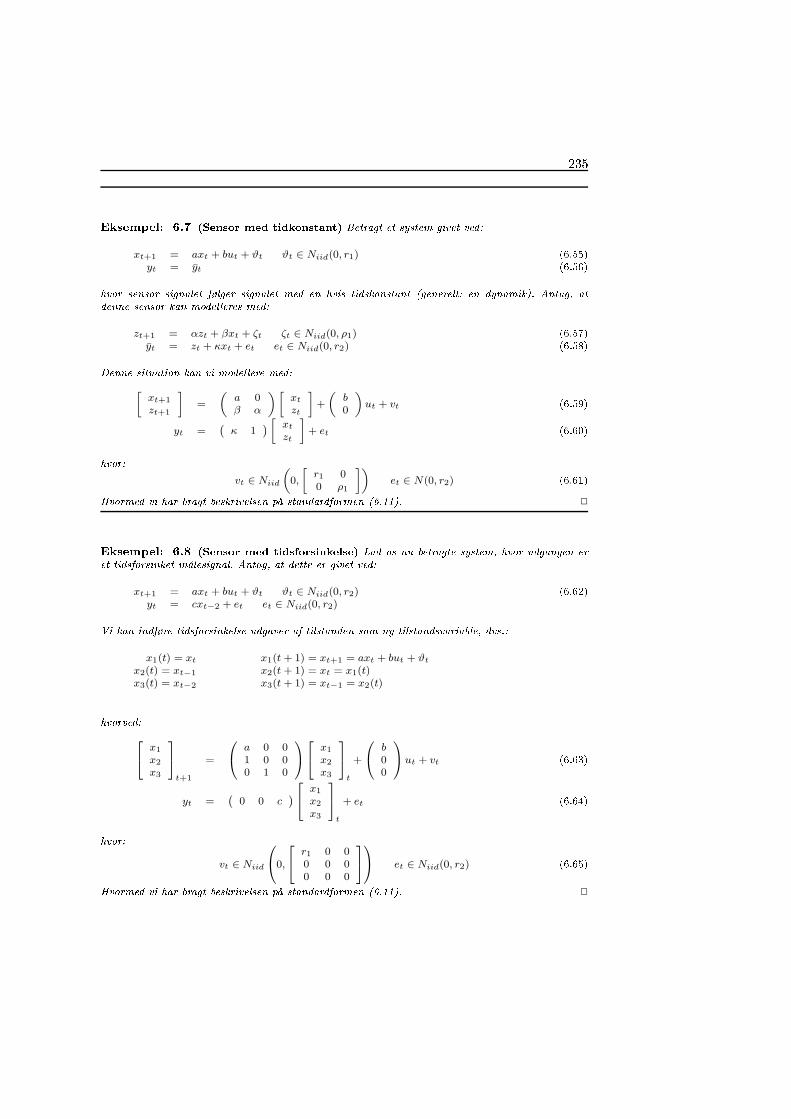
235Eksempel: 6.7 (Sensor med tidkonstant) Betragt et system givet ved:xt+1 = axt + but + ϑt ϑt ∈ Niid(0, r1) (6.55)
yt = yt (6.56)hvor sensor signalet følger signalet med en hvis tidskonstant (generelt: en dynamik). Antag, atdenne sensor kan modelleres med:zt+1 = αzt + βxt + ζt ζt ∈ Niid(0, ρ1) (6.57)
yt = zt + κxt + et et ∈ Niid(0, r2) (6.58)Denne situation kan vi modellere med:»
xt+1
zt+1
–
=
„
a 0β α
«»
xt
zt
–
+
„
b0
«
ut + vt (6.59)yt =
`
κ 1´
»
xt
zt
–
+ et (6.60)hvor:vt ∈ Niid
„
0,
»
r1 00 ρ1
–«
et ∈ N(0, r2) (6.61)Hvormed vi har bragt beskrivelsen på standardformen (6.11). 2Eksempel: 6.8 (Sensor med tidsforsinkelse) Lad os nu betragte system, hvor udgangen eret tidsforsinket målesignal. Antag, at dette er givet ved:xt+1 = axt + but + ϑt ϑt ∈ Niid(0, r2) (6.62)
yt = cxt−2 + et et ∈ Niid(0, r2)Vi kan indføre tidsforsinkelse udgaver af tilstanden som ny tilstandsvariable, dvs.:x1(t) = xt x1(t + 1) = xt+1 = axt + but + ϑt
x2(t) = xt−1 x2(t + 1) = xt = x1(t)x3(t) = xt−2 x3(t + 1) = xt−1 = x2(t)hvorved:2
4
x1
x2
x3
3
5
t+1
=
0
@
a 0 01 0 00 1 0
1
A
2
4
x1
x2
x3
3
5
t
+
0
@
b00
1
Aut + vt (6.63)yt =
`
0 0 c´
2
4
x1
x2
x3
3
5
t
+ et (6.64)hvor:vt ∈ Niid
0
@0,
2
4
r1 0 00 0 00 0 0
3
5
1
A et ∈ Niid(0, r2) (6.65)Hvormed vi har bragt beskrivelsen på standardformen (6.11). 2
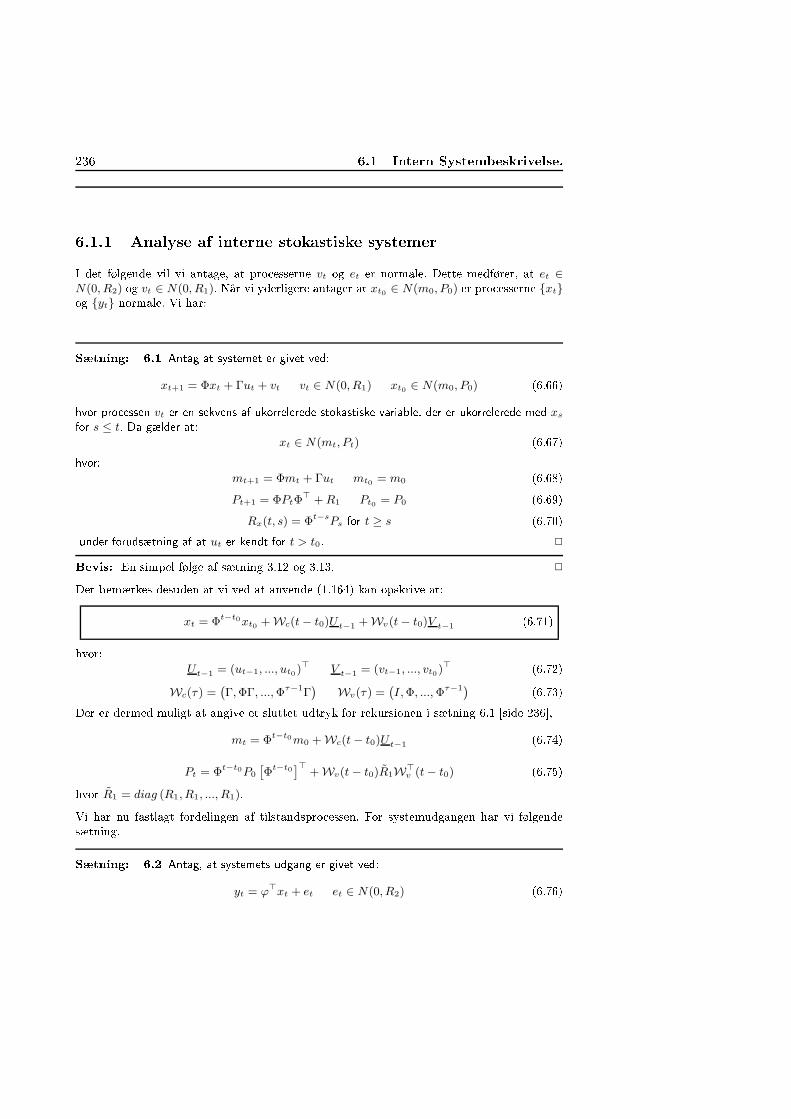
236 6.1 Intern Systembeskrivelse.6.1.1 Analyse af interne stokastiske systemerI det følgende vil vi antage, at pro esserne vt og et er normale. Dette medfører, at et ∈N(0, R2) og vt ∈ N(0, R1). Når vi yderligere antager at xt0 ∈ N(m0, P0) er pro esserne xtog yt normale. Vi har:Sætning: 6.1 Antag at systemet er givet ved:
xt+1 = Φxt + Γut + vt vt ∈ N(0, R1) xt0 ∈ N(m0, P0) (6.66)hvor pro essen vt er en sekvens af ukorrelerede stokastiske variable, der er ukorrelerede med xsfor s ≤ t. Da gælder at:xt ∈ N(mt, Pt) (6.67)hvor:
mt+1 = Φmt + Γut mt0 = m0 (6.68)Pt+1 = ΦPtΦ
⊤ +R1 Pt0 = P0 (6.69)Rx(t, s) = Φt−s
Ps for t ≥ s (6.70)under forudsætning af at ut er kendt for t > t0. 2Bevis: En simpel følge af sætning 3.12 og 3.13. 2Det bemærkes desuden at vi ved at anvende (1.164) kan opskrive at:xt = Φt−t0xt0 + Wc(t− t0)U t−1 + Wv(t− t0)V t−1 (6.71)hvor:U t−1 = (ut−1, ..., ut0)⊤ V t−1 = (vt−1, ..., vt0)⊤ (6.72)
Wc(τ ) =`
Γ,ΦΓ, ...,Φτ−1Γ´
Wv(τ ) =`
I,Φ, ...,Φτ−1´ (6.73)Der er dermed muligt at angive et sluttet udtryk for rekursionen i sætning 6.1 [side 236,mt = Φt−t0m0 + Wc(t− t0)U t−1 (6.74)
Pt = Φt−t0P0
ˆ
Φt−t0˜⊤
+ Wv(t− t0)R1W⊤v (t− t0) (6.75)hvor R1 = diag (R1, R1, ..., R1).Vi har nu fastlagt fordelingen af tilstandspro essen. For systemudgangen har vi følgendesætning.Sætning: 6.2 Antag, at systemets udgang er givet ved:
yt = ϕ⊤xt + et et ∈ N(0, R2) (6.76)

6.1.1 Analyse af interne stokastiske systemer 237hvor pro essen et er en sekvens af ukorrelerede stokastiske variable, der er ukorrelerede med xsfor s ≤ t. Antag at xt ∈ N(mt, Pt) og at R12 = E
n
vte⊤t
o. Da gælder at:yt ∈ N(µt, Qt) (6.77)hvor:
µt = ϕ⊤mt Qt = ϕ
⊤Ptϕ+R2 (6.78)For s > t gælder at:
Ry(s, t) = ϕ⊤Φs−t
Ptϕ+ ϕ⊤Φs−t−1
R12 (6.79)2Bevis: Beviset er en simpel følge af sætning sætning 3.14 [side 141. 2Videre kan vi interessere os for en række fremtidige værdier:
Yt = (yt0 , ..., yt−1, yt)⊤ (6.80)I det følgende vil vi i visse tilfælde anvende notattionen Yt = Yt0:t, Ut = Ut0:t og Vt = Vt0:t.Vi kan i direkte forlængelse af [side 48 (1.172) angive at:
Yt = Wo(t− t0)xt0 + Πt−t0Ut + Πt−t0Vt−1 + ǫt (6.81)hvor:Wo(τ ) =
8
>
>
>
<
>
>
>
:
ϕ⊤
ϕ⊤Φ...ϕ⊤Φτ−1
9
>
>
>
=
>
>
>
;
(6.82)Her er:Πτ =
8
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
:
h0 0 0 0 ... 0h1 h0 0 0 ... 0h2 h1 h0 0 ... 0h3 h2 h1 h0 ... 0... ... ... ... . . . ...hτ hτ−1 hτ−2 hτ−3 ... h0
9
>
>
>
>
>
>
>
=
>
>
>
>
>
>
>
;
hτ =
8
<
:
ϕ⊤Φτ−1Γ for τ > 0∆ for τ = 00 for τ < 0
(6.83)og:Πτ =
8
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
:
0 0 0 0 ... 0
h1 0 0 0 ... 0
h2 h1 0 0 ... 0
h3 h2 h1 0 ... 0... ... ... ... . . . ...hτ hτ−1 hτ−2 hτ−3 ... h1
9
>
>
>
>
>
>
>
>
=
>
>
>
>
>
>
>
>
;
hτ = ϕ⊤Φτ−1 for τ > 0 (6.84)Bemærk, at Π normalt ikke er kvadratisk. Endelig er:
ǫt = (et0 , ..., et−1, et)⊤ (6.85)

238 6.1 Intern Systembeskrivelse.Vi er således i stand til at give et sluttet udtryk for fordelingen af Yt. (Her angivet underforudsætning af Ut er kendt). Der gælder at:Yt ∈ N(Θt,Σt) (6.86)hvor:
Θt = Wo(t− t0)xt0 + Πt−t0Ut (6.87)og hvor:Σt = Wo(t− t0)P0W⊤
o (t− t0) (6.88)+Πt−t0R1Π
⊤t−t0
+ R2 (6.89)+Πt−t0R12 + R
⊤12Π
⊤t−t0 (6.90)hvor:
R2 =
2
6
6
6
4
R2 0 ... 00 R2 ... 0... ... . . . ...0 0 ... R2
3
7
7
7
5
R12 =
2
6
4
R12 ... 0 0... . . . ... ...0 ... R12 0
3
7
5(6.91)Eksempel: 6.9 (Den Optimale Observer) I dette afsnit vil vi anvende de to forrige sætningertil at analysere et stokastisk system. Det aktuelle system er en observer, der er beskrevet i afsnit2.4.1. Resultatet af analysen vil blive anvendt til at nde den observer, der i middel har minimalestimationsfejl.Antag at det forelagte system er givet ved:
xt+1 = Φxt + Γut + vt vt ∈ N(0, R1) xt0 ∈ N(m0, P0) (6.92)yt = ϕ⊤xt + et et ∈ N(0, R2) (6.93)hvor et og vt er sekvenser af ukorrelerede stokastiske variable, der er ukorrelerede med xs for
s ≤ t. Vi antager desuden at et og vt er ukorreleret. Fra den deterministiske reguleringsteknik (sef.eks. afsnit 2.4.1) ved vi at observeren for dette system er givet ved:xt+1 = Φxt + Γut + K(yt − ϕ⊤xt) (6.94)eller som angivet i gur 6.3.Deneres estimationsfejlen som xt = xt − xt kan vi let opstille en rekursion for denne, nemlig:xt+1 = (Φ − Ktϕ
⊤)xt + vt − Ktet (6.95)hvor der er indført en tidsvariation i observerens forstærkning. D.v.s. at middelværdi og variansifølge sætning 6.1 udvikles efter:mt+1 = (Φ − Ktϕ
⊤)mt mt0 = m0 − xt0 (6.96)Pt+1 = (Φ − Ktϕ
⊤)Pt(Φ − Ktϕ⊤)⊤ + R1 + KtR2K⊤
t Pt0 = P0
= ΦPtΦ⊤ + R1 − Ktϕ
⊤PtΦ⊤ − ΦPtϕK⊤
t
+Ktϕ⊤PtϕK⊤
t + KtR2K⊤t (6.97)Vi vil vælge Kt således, at der for enhver vektor, a, gælder at:
E
n
(a⊤xt)2o
= a⊤Pta + a⊤mtm⊤t a (6.98)
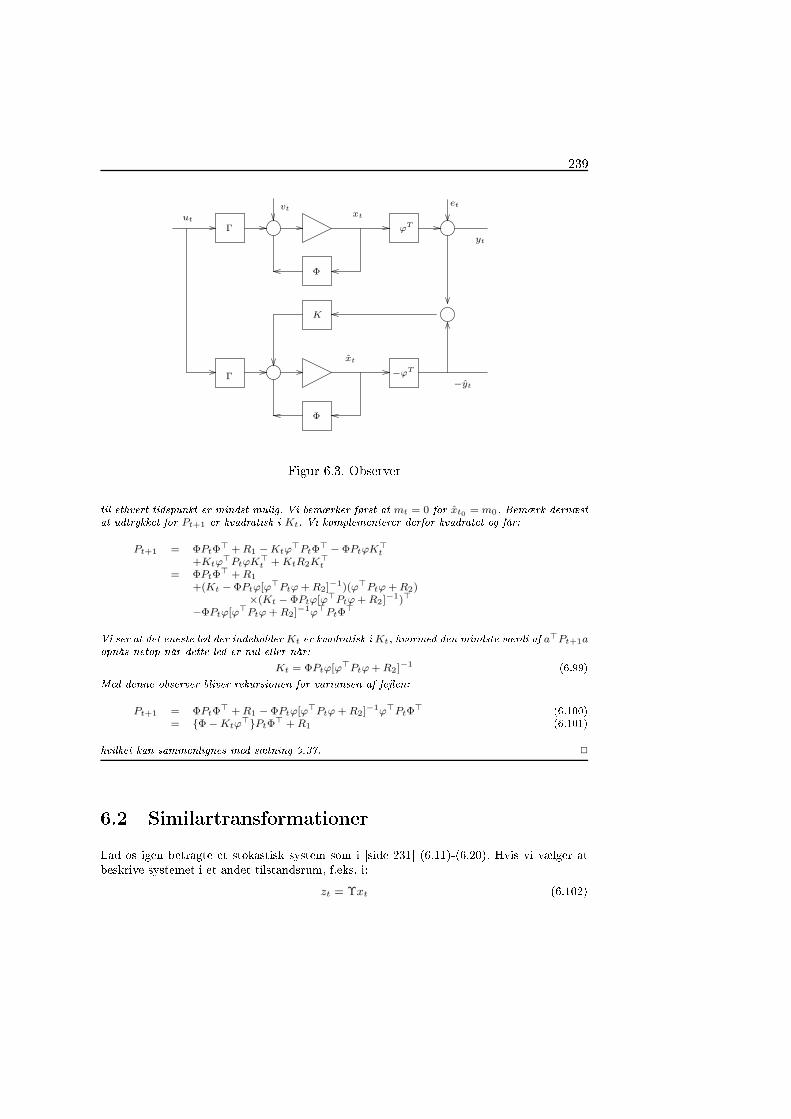
239
−ϕT
ut
Γ
vtxt
ϕT
et
yt
Φ
K
Γ
Φ
xt
−yt
Figur 6.3. Observertil ethvert tidspunkt er mindst mulig. Vi bemærker først at mt = 0 for xt0 = m0. Bemærk dernæstat udtrykket for Pt+1 er kvadratisk i Kt. Vi komplementerer derfor kvadratet og får:Pt+1 = ΦPtΦ
⊤ + R1 − Ktϕ⊤PtΦ
⊤ − ΦPtϕK⊤t
+Ktϕ⊤PtϕK⊤
t + KtR2K⊤t
= ΦPtΦ⊤ + R1
+(Kt − ΦPtϕ[ϕ⊤Ptϕ + R2]−1)(ϕ⊤Ptϕ + R2)
×(Kt − ΦPtϕ[ϕ⊤Ptϕ + R2]−1)⊤
−ΦPtϕ[ϕ⊤Ptϕ + R2]−1ϕ⊤PtΦ
⊤Vi ser at det eneste led der indeholder Kt er kvadratisk i Kt, hvormed den mindste værdi af a⊤Pt+1aopnås netop når dette led er nul eller når:Kt = ΦPtϕ[ϕ⊤Ptϕ + R2]−1 (6.99)Med denne observer bliver rekursionen for variansen af fejlen:
Pt+1 = ΦPtΦ⊤ + R1 − ΦPtϕ[ϕ⊤Ptϕ + R2]
−1ϕ⊤PtΦ⊤ (6.100)
= Φ − Ktϕ⊤PtΦ
⊤ + R1 (6.101)hvilket kan sammenlignes med sætning 3.37. 26.2 SimilartransformationerLad os igen betragte et stokastisk system som i [side 231 (6.11)-(6.20). Hvis vi vælger atbeskrive systemet i et andet tilstandsrum, f.eks. i:zt = Υxt (6.102)

240 6.3 Ekstern Systembeskrivelse(se i øvrigt appendix C vedrørende basisskifte), hvor Υ er regulær, da vil systemet værebeskrevet af:»
Φz Γz
ϕ⊤z ∆z
–
=
»
ΥΦΥ−1 ΥΓϕ⊤Υ−1 ∆
– (6.103)og af:R1z = ΥR1Υ
⊤R2z = R2 (6.104)6.3 Ekstern SystembeskrivelseI dette kapitel vil vi betragte lineære tidsinvariante dynamiske systemer, hvis udgang, yt,dels er påvirket af styresignalet, ut samt af en stokastisk forstyrrelse, ξt. Lad Hs(q) og Hn(q)betegne overføringerne fra henholdsvis styresignal og forstyrrelse til udgangen. Systemet kandermed beskrives ved:
yt = Hs(q)ut +Hn(q)ξt (6.105)eller som illustreret i gur 6.4. I det følgende vil vi fokusere på relationerne mellem yt og ξt,ξt
ut
Hn(q)
Hs(q)
yt
Figur 6.4. Stokastisk systemnår systemet er påvirket af en andenordens stokastisk pro es, ξt. Dette impli erer at mid-delværdifunktionen, mξ(t), og kovariansfunktionen, rξ(s, t) eksisterer. Vi antager desudenat de to overføringer er asymptotisk stabile.Lad C og D være to polynomier i q−1, der beskriver overføringen fra den stokastiske påvirk-ning ξt til udgangen. Lad desuden hi angive impulsresponsen for denne overføring. Systemetkan således beskrives ved:yt = Hs(q)ut +
C(q−1)
D(q−1)ξt = Hs(q)ut +
∞X
i=0
hiξt−i (6.106)Vi har da følgende sætning 6.3.Sætning: 6.3 Betragt et lineært tidsinvariant dynamisk system givet ved (6.106) hvor beggeoverføringer er asymptotisk stabile. Lad påvirkningen, ξt, være en stokastisk pro es af anden

241orden med middelværdifunktion mξ(t) og kovariansfunktion rξ(s, t). Da gælder at yt er enandenordens stokastisk pro es med en middelværdifunktion, der opfylder:my(t) = Hs(q)ut +Hn(q)mξ(t) (6.107)Hvis støjpro essen, ξt er en normalpro es er yt også en normalpro es. 2Bevis: Først skal det bevises at udgangen også er en andenordens pro es. Dvs. det skalbl.a. godtgøres at den uendelige sum i (6.106) eksisterer. Antag derfor i denne del af bevisetat ut ≡ 0 og at Eξt ≡ 0. Vi må derfor sikre atyt = Hn(q)ξt =
∞X
i=0
hiξt−i (6.108)har en mening. Hvis summen var endelig ville der ikke være noget problem, fordi i dettilfælde er yt bare en simpel vægtet sum af stokastiske variable. Når summen er uendelig,må vi først sikre os at den konvergerer. For at undersøge om hvorvidt rækken konvergererdanner vi Cau hy-rækken:Λm,n =
mX
i=n
hiξt−i (6.109)hvorom det gælder at:E
(
(
mX
i=n
hiξt−i)2
)
= E
(
mX
i=n
mX
j=n
hihjξt−iξt−j
) (6.110)=
mX
i=n
mX
j=n
hihjrξ(t− i, t− j) (6.111)Da ξt, t ∈ er en stokastisk pro es af anden orden har vi at Eξ2t ≤ a <∞ og følgelig er:|rξ(s, t)| ≤
p
rξ(s, s)rξ(t, t) ≤ a (6.112)Da det (lineære tidsinvariante) dynamiske system er asymptotisk stabilt har vi at:|hi| ≤ α
i hvor |α| < 1 (6.113)Vi nder da, at summen kan gøres arbitrært lille ved at vælge n og m passende store.Den uendelige sum eksisterer da (dvs. rækken konvergerer i middelkvadrat) og pro essenyt, t ∈ T er da en stokastisk pro es af anden orden.I bevisets sidste del relakseres fra antagelsen på styresignal og middelværdi. Vi har at:
my(t) = Eyt = Hs(q)ut +EHn(q)ξt (6.114)Lad os fokusere på det sidste led. Antag derfor at ut ≡ 0. Dermed er:D(q−1)yt = C(q−1)ξt (6.115)eller at:
yt + d1yt−1 + ...+ dnyt−n = c0ξt + c1ξt−1 + ...+ cnξt−n (6.116)Ved at danne forventingsværdien får vi sætningens sidste halvdel. 2Vi nder med andre ord at middelværdien probagerer gennem systemet som signalet selv.Lad os dernæst nde krydskovariansfunktionen.
242 6.3 Ekstern SystembeskrivelseSætning: 6.4 Lad pro essen, yt, være givet ved (6.106). og lad påvirkningsignalet ξt væreen stokastisk pro es af anden orden med kovariansfunktion rξ(s, t). Da gælder, at krydskovari-ansfunktionen ryξ(s, t) er givet ved:D(q−1)ryξ(s, t) = C(q−1)rξ(s, t) (6.117)eller ved:
ryξ(s, t) = hs ⋆ rξ(s, t) =
∞X
i=0
hirξ(s− i, t) (6.118)2Bemærk, at skifteoperatoren q−1 kun virker på det første tidsargument af kovariansfunktio-nen, d.v.s. q−1ryξ(s, t) = ryξ(s− 1, t).Bevis: Uden at tabe generalitet antager vi at ut ≡ 0 og at Eξt = 0. Dette medfører at
Eyt = 0. Dermed er:ryξ(t, s) = Eytξs = Eξsyt = rξy(s, t) (6.119)Hvis pro esligningen 6.116 multipli eres med ξs,
ytxs + d1yt−1xs + ...+ dnyt−nxs = c0ξtxs + c1ξt−1xs + ...+ cnξt−nxs (6.120)og forventningen dannes, fås at:ryξ(t, s) + d1ryξ(t− 1, s) + ...+ dnryξ(t− n, s) = (6.121)
c0rξ(t, s) + c1rξ(t− 1, s) + ...+ cnrξ(t− n, s) (6.122)hvorved sætningen fremkommer. 2Lad os dernæst fokusere på kovariansfunktionen for yt.Sætning: 6.5 Lad en andenordens pro es, yt, være givet som angivet ovenfor. Da gælderat kovariansfunktionen ry(t, s) er givet ved:D(q−1)ry(t, s) = C(q−1)rξy(t, s) (6.123)eller ved:
ry(t, s) = ht ⋆ rξy(t, s) =∞X
i=−∞
∞X
k=−∞hihkrξy(s− k, t− i) (6.124)
2

6.3.1 Stationære Pro esser 243Bemærk, at ryξ(s, t) er givet sætning 6.4 og at rξy(t, s) = r⊤yξ(s, t).Bevis: Det bemærkes først, at når Eyt = 0 er ry(t, s) = Eytys. Hvis pro esligningen6.116 multipli eres med ys får vi at:ytys + d1yt−1ys + ...+ dnyt−nys = c0ξtys + c1ξt−1ys + ...+ cnξt−nys (6.125)Efter forventningsværdidannelse giver dette at:
ry(t, s) + d1ry(t− 1, s) + ...+ dnry(t− n, s) =c0rξy(t, s) + c1rξy(t− 1, s) + ...+ cnrξy(t− n, s)eller som angivet i [side 242 (6.123). Da nu:
ryξ(τ, σ) = hτ ⋆ rξ(τ, σ) =
∞X
k=−∞hkrξ(τ − k, σ) = r
⊤ξy(σ, τ ) (6.126)er:
ry(t, s) =∞X
i=−∞hirξy(t− i, s) =
∞X
i=−∞hi
∞X
k=−∞hkrξ(s− k, t− i) (6.127)
26.3.1 Stationære Pro esserVi vil nu spe ialisere til at det asymptotisk stabile system påvirkes af en (svag) stationærstokastisk pro es. Når forstyrrelsen ξt er en stationær stokastisk pro es gælder der atmξ(t) = mξ rξ(t, s) = rξ(t− s) (6.128)Sætning: 6.6 Lad yt være givet ved (6.106), hvor ut = u0 er et konstant styresignal. Lad ξtvære en svagt stationær pro es. Da gælder at yt er en svagt stationær pro es med middelværdien:
my = Hs(1)u0 +Hn(1)mξ (6.129)Hvis ξt er en normalpro es, da er yt en strengt stationær normalpro es. 2Bevis: Fra sætning 6.3 har vi umiddelbart at middelværdifunktionen er konstant:my = Hs(1)u0 +
∞X
i=−∞himξ = Hs(1)u0 +Hn(1)mξ (6.130)Videre er kovariansfunktionen kun en funktion af tidsforskellen, t− s, idet:
ry(t, s) =∞X
i=−∞
∞X
k=−∞hihkrξ(t− i, s− k)
=∞X
i=−∞
∞X
k=−∞hihkrξ(t− s+ k − i)
= ry(t− s)
244 6.3 Ekstern SystembeskrivelseYderligere er krydskovariansen kun en funktion af tidsforskellen:ryξ(t, s) =
∞X
i=−∞hirξ(t− i, s) =
∞X
i=−∞hirξ(t− s− i) = ryξ(t− s) (6.131)For en normalpro es er den simultane fordelingsfunktion fuldstændig spe i eret ved densto første momenter, d.v.s. dens middelværdifunktion og dens kovariansfunktion. Dermed er
yt strengt stationær, hvis ξt er en stationær normalpro es. 2Sætning: 6.7 Lad pro essen, yt, være givet ved 6.106 hvor ut = u0 er et konstant styre-signal. Lad påvirkningsignalet ξt være en svag stationær pro es med konstant middelværdi, mξog kovariansfunktion rξ(τ ). Da er yt en svag stationær pro es med:my = Hs(1)u0 +
C(1)
D(1)mξ (6.132)krydskovariansfunktionen ryξ og kovariansfunktionen ry givet ved:
D(q−1)ryξ(τ ) = C(q−1)rξ(τ ) (6.133)D(q−1)rξ(τ ) = C(q−1)rξy(τ ) (6.134)eller ved:
ryξ(τ ) = hτ ⋆ rξ(τ ) (6.135)ry(τ ) = hτ ⋆ rξy(τ ) = hτ ⋆ rξ(τ ) ⋆ ~
⊤τ (6.136)Hvis ξt er en normalpro es, da er yt en strengt stationær pro es. 2Bevis: Sætningen er en følge af sætning 6.3, 6.4, 6.5 og 6.6. Sidste lighedstegn fremkommeraf:
rξy(τ ) = r⊤yξ(−τ ) samt af ryξ(τ ) = hτ ⋆ rξ(τ ) (6.137)
2Udvidelse: 13 Foldningsudstrykkene i sætning 6.6 er desuden gyldige for tidskontinuerte pro- esser, når blot foldningen tolkes som en foldning mellem tidskontinuerte signaler. 2Sætning 6.7 kan i frekvensdomænet (dvs. vha. spektraltætheder) formuleres noget mereelegant.Sætning: 6.8 Lad yt være som angivet ovenfor og lad påvirkningssignalet, ξt, være en svagtstationær pro es med middelværdi mξ og spektrum, Ψξ(z). Hvis systemet er asymptotisk stabilter udgangen, yt, en svagt stationær pro es med middelværdi:my = Hs(1)u0 +Hn(1)mξ (6.138)og
Ψy(z) = H(z)Ψξ(z)H⊤(z−1) (6.139)
Ψyξ(z) = H(z)Ψξ(z) (6.140)2

6.3.2 Modelstrukturer 245Bevis: Vi mangler blot at beregne udtrykkene for de angivne spektre. vi har:Ψy(z) = Z ry(τ ) = Z
n
hτ ⋆ rξ(τ ) ⋆ ~⊤τ
o
= H(z)Z rξ(τ )H⊤(z−1)For krydsspektrum gælder tilsvarende:Ψyξ(z) = Z ryξ(τ ) = H(z)Z rξ(τ )
= H(z)Ψξ(z)
2Hvis vi arbejder med spektraltætheder gælder sammenhængen:φy(ω) = |H(ejω)|2φξ(ω) (6.141)ogφyξ(ω) = H(ejω)φξ(ω) (6.142)Ovenstående resultat har en simpel fysisk fortolkning, |H(ejω)|2 er den stationære amplitudefor yt, hvis ξt = sin(ωt). Værdien af udgangens spektrale tæthed, φy(ω) er produktet mellemeektforstærkningen, |H(ejω)|2 og påvirkningens spektrale tæthed.Udtrykket for krydsspektraltætheden kan anvendes til at bestemme overføringen for et dy-namisk system. Antag at påvirkningssignalet er hvid støj, d.v.s. at:
φξ(ω) = σ2 (6.143)Da er:
ryξ(τ ) = σ2hτ eller φyξ(ω) = H(ejω)σ2 (6.144)Ved at måle krydskovariansen eller krydsspektraltætheden mellem indgangs - og udgangs-signal får vi impulsresponsen eller overføringsfunktionen for systemet.Udvidelse: 14 Sætning 6.8 er gyldig for tidskontinuerte pro esser, når blot udtrykkene for despektrale tætheder erstattes af:
φy(ω) = H(ω)φξ(ω)H(−ω) = |H(ω)|2φξ(ω) (6.145)φyξ(ω) = H(ω)φξ(ω) (6.146)
26.3.2 ModelstrukturerGenerelt kan man betragte udgangen for et lineært, tidsinvariant system som beståendeaf tre bidrag, et bidrag fra overføringen fra styresignalet, et stokastisk bidrag og endeligtet konstant bidrag, der kan skyldes forskellige årsager. Det kan hidrøre fra middelværdi afforstyrrelser eller skyldes det valgte arbejdspunkt.yt =
B
Fut +
C
Det + d (6.147)

246 6.3 Ekstern SystembeskrivelseBF
ut
yt
et dCD
Figur 6.5. Box-Jenkins strukturenStrukturen beskrevet i (6.147) og i gur 6.4 betegnes ofte som Box-Jenkins strukturen.I visse tilfælde er der et sæt poler, der er sammenfaldende i de to overføringer. Dette kanudnyttes til ere formål og derfor trækkes de fælles poler ud i et A-polynomium som i (6.148)Denne struktur betegnes som L-strukturen og er illustreret i gur 6.6.Ayt =
B
Fut +
C
Det + d (6.148)
et
utyt
BF
CD
1A
d
Figur 6.6. L-strukturenI ARMAX-strukturen (eller CARMA-strukturen som den også kaldes) er systemets polerfælles for de to overføringer. Dette vil ofte være tilfældet hvis forstyrrelse og styreindgreboptræder på samme sted i systemet. Det kan også med et begreb hentet fra kredsløbsteorienbetegnes som indgangsforstyrrelser.Ayt = But +Cet + d (6.149)Det bemærkes, at alle tre former kan bringes på ARMAX-formen, hvis det tillades at dereksisterer fælles faktorer mellem polynomierne. I de efterfølgende kapitler vil udledningerneformelt blive udført på ARMAX-strukturen, men kan transformeres til en af de to øvrige.A epteres ikke fælles faktorer (i andre end mellem B og C) er Box-Jenkins- og ARMAX-strukturerne forskellige. L-strukturen indeholder begge og kan opfattes som en generel struk-tur. Da L-strukturen kan indeholde fælles nulpunkter i de to overføringer vil vi dog ikke herbetegne den som sådan.
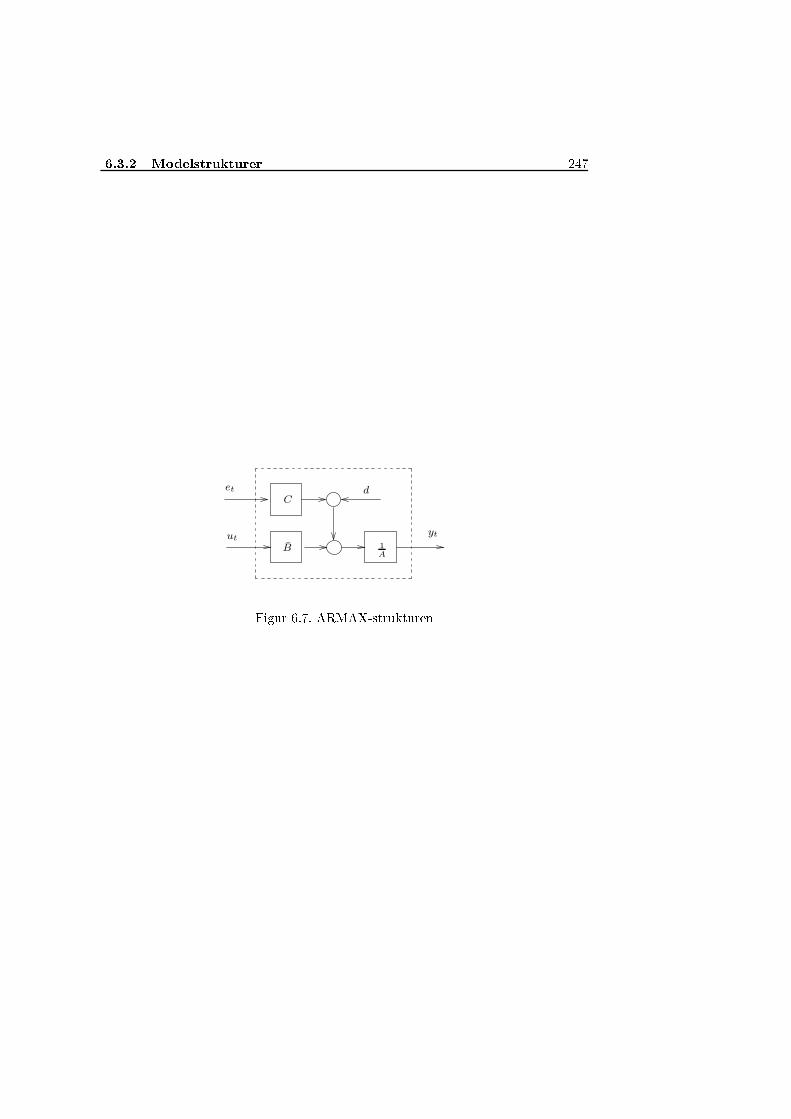
6.3.2 Modelstrukturer 247
1A
utyt
et
B
Cd
Figur 6.7. ARMAX-strukturen
248 6.3 Ekstern Systembeskrivelse
Kapitel 7Filterteori - Intern BeskrivelseI de forrige kapitler har vi set, hvorledes vi kan beskrive og modellere stokastiske forstyrrel-ser. Disse forstyrrelser kan have forskellige oprindelser. De kan for det første være direkteeksterne påvirkninger, hvis eekt ikke på forhånd kan forudsiges. Forstyrrelserne kan ogsåskyldes det faktum, at vores modellering v. hj. a. f.eks. fysiske love indeholder en lang rækkeapproximationer. I kapitel 6 betragtede vi metoder til beskrivelse og analyse af dynamiskesystemer, der er påvirket af stokastiske forstyrrelser. Inden vi vil fokusere på hvorledes vikan regulere stokastiske systemer, vil vi beskæftige os med problemer omkring estimationaf systemtilstande ud fra målinger på systemudgangen. Dette er en del af et større områdevedrørende at adskilde (ltrere) et signal, xt og en forstyrrende støj, et.Centrale referen er i denne sammenhæng er (Åström 1970), (Jazwinsky 1970), (Lewis 1986b),(Gelb 1974), (Grimple & Johnson 1988), (Anderson & Moore 1979), (Davis & Vinter 1985),(Middleton & G. Goodwin 1990), (Goodwin & K. S. Sin 1984), (Grewal & Andrews 1993).Lad os indlede dette kapitel med et eksempel.Eksempel: 7.1 Med henblik på regulering af et vandkraftværk, er vi interesseret i måle dendaglige vandmængde, qt, der løber ind i vandreservoiret foran værket. Hvis vi udsætter en føleri indløbet kan vi måle denne vandmængde. Imidlertid er denne måling, yt, ikke identisk med qt.Dette kan modelleres som målingen består af qt overlejret af et stokastisk bidrag dvs.yt = qt + et (7.1)hvor et er støjbidraget. Da vi ønsker at kende qt, vil vi i det følgende undersøge metoder til atbestemme qt ud fra målingerne yt. 2Betragt to stokastiske pro esser, xt og et, som vi vil benævne som signal og støj, henholdsvis.Antag at målingen eller observationen, yt, er relateret til signalet på følgende måde:yt = g(xt, et) (7.2)249
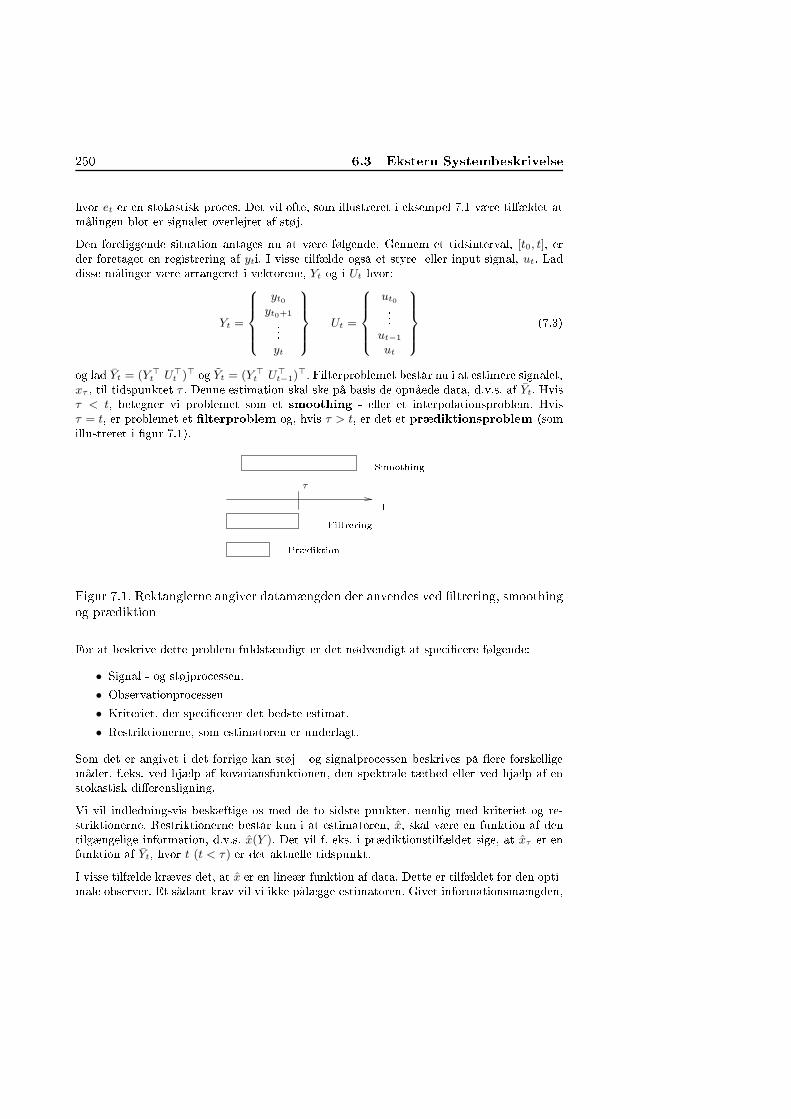
250 6.3 Ekstern Systembeskrivelsehvor et er en stokastisk pro es. Det vil ofte, som illustreret i eksempel 7.1 være tilfældet atmålingen blot er signalet overlejret af støj.Den foreliggende situation antages nu at være følgende. Gennem et tidsinterval, [t0, t], erder foretaget en registrering af yti. I visse tilfælde også et styre- eller input signal, ut. Laddisse målinger være arrangeret i vektorene, Yt og i Ut hvor:Yt =
8
>
>
>
<
>
>
>
:
yt0
yt0+1...yt
9
>
>
>
=
>
>
>
;
Ut =
8
>
>
>
<
>
>
>
:
ut0...ut−1
ut
9
>
>
>
=
>
>
>
;
(7.3)og lad Yt = (Y ⊤t U⊤
t )⊤ og Yt = (Y ⊤t U⊤
t−1)⊤. Filterproblemet består nu i at estimere signalet,
xτ , til tidspunktet τ . Denne estimation skal ske på basis de opnåede data, d.v.s. af Yt. Hvisτ < t, betegner vi problemet som et smoothing - eller et interpolationsproblem. Hvisτ = t, er problemet et lterproblem og, hvis τ > t, er det et prædiktionsproblem (somillustreret i gur 7.1). tτPrædiktionFiltrering
SmoothingFigur 7.1. Rektanglerne angiver datamængden der anvendes ved ltrering, smoothingog prædiktionFor at beskrive dette problem fuldstændigt er det nødvendigt at spe i ere følgende:
• Signal - og støjpro essen.• Observationpro essen• Kriteriet, der spe i erer det bedste estimat.• Restriktionerne, som estimatoren er underlagt.Som det er angivet i det forrige kan støj - og signalpro essen beskrives på ere forskelligemåder, f.eks. ved hjælp af kovariansfunktionen, den spektrale tæthed eller ved hjælp af enstokastisk dierensligning.Vi vil indledningsvis beskæftige os med de to sidste punkter, nemlig med kriteriet og re-striktionerne. Restriktionerne består kun i at estimatoren, x, skal være en funktion af dentilgængelige information, d.v.s. x(Y ). Det vil f. eks. i prædiktionstilfældet sige, at xτ er enfunktion af Yt, hvor t (t < τ ) er det aktuelle tidspunkt.I visse tilfælde kræves det, at x er en lineær funktion af data. Dette er tilfældet for den opti-male observer. Et sådant krav vil vi ikke pålægge estimatoren. Givet informationsmængden,
251Y , er vores mål at bestemme, x(Y ), således at estimationsfejlen,
x = x− x (7.4)er lille. Dette kan j.v.f det tidligere forstås på ere måder, der hver især leder til forskelligeestimationsmetoder. Vi vil i det følgende vælge, at bestemme estimatet således at:J = E
n
|x|2o (7.5)er mindst mulig. For dette kriterium har vi ifølge sætning 3.35 følgende sætning.Sætning: 7.1 Lad x(Y ) være en estimator, der baseret på informationsmængden Y minime-rer kriteriet
J = E
n
|x− x|2o (7.6)da er x(Y ) givet ved:
x(Y ) = E
n
x|Yo (7.7)altså den betingde forventningsværdi. 27.1 TilstandsestimationVi vil nu fokusere på metoder til estimation af systemtilstande. Vi indleder med at behandleproblemet som et lterproblem. Lad systemet være givet ved:
xt+1 = Φxt + Γut + vt xt0 ∈ N(m0, P0) vt ∈ N(0, R1) (7.8)yt = ϕ
⊤xt + et et ∈ N(0, R2) R12 = Cov(vt, et) (7.9)Støjpro esserne, vt og et, antages at være sekvenser af uafhængige normalfordelte sto-kastiske variable, der er uafhængige af xs for s ≤ t. Bemærk, at vi med angivelsen afsystembeskrivelsen har angivet signal - og støjpro essen samt observationsligningen.I de forrige kapitler blev det illustreret hvorledes en ikke hvid støjpåvirkning kan model-leres og indbygges i systembeskrivelsen. Herved kan analysen af interne systembeskrivelserbegrænses til ovennævnte type. Vi vil først angive et kalmanlter for det tilfældet, at derikke er korrelation mellem pro es - og målestøj (R12 = 0).Med det valg af kriterium og restriktioner, der ligger til grund for sætning 7.1, er det opti-male estimat givet ud fra den betingede tæthed af xt, dvs. f(xt|Yt). Beregningen af dennebetingede tæthed (og dermed estimatet) kan naturligvis som angivet i afsnit 3.7 (dvs. somangivet i sætning 3.36) ske ud fra kendskabet til f(xt|Yt) og f(Yt). Her vil vi dog bestem-me estimatet rekursivt. Vi vil ydermere opsplitte rekursionerne i en tidsmæssig opdatering,d.v.s. en opdatering:
xt|Yt → xt+1|Yt (7.10)
252 7.1 Tilstandsestimationog en datamæssig opdatering:xt+1|Yt → xt+1|yt+1, Yt = xt+1|Yt+1 (7.11)Denne opdatering samler vi i nedenstående sætning.Sætning: 7.2 Lad et stokastisk system være givet ved (7.8) med R12 = 0. Da gælder at:
xt|Yt ∈ N(xt|t, Pt|t) (7.12)Bestemmelsen af (den betingede) middelværdi og varians kan deles i en tidsmæssig opdateringog en dataopdatering. For tidsopdateringen gælder at:xt+1|t = Φxt|t + Γut xt0|t0 = m0 (7.13)Pt+1|t = ΦPt|tΦ
⊤ +R1 Pt0|t0 = P0 (7.14)hvor:xt+1|Yt ∈ N(xt+1|t, Pt+1|t) (7.15)For estimationsfejlen, der er uafhængig af Yt, gælder der ubetinget at:
xt+1 ≡ xt+1|t = xt+1 − xt+1|t ∈ N(0, Pt+1|t) (7.16)For dataopdatering gælder at:xt+1|t+1 = xt+1|t + κt+1[yt+1 − ϕ
⊤xt+1|t] (7.17)
Pt+1|t+1 = [I − κt+1ϕ⊤]Pt+1|t (7.18)hvor:
κt+1 = Pt+1|tϕ[ϕ⊤Pt+1|tϕ+R2]
−1 (7.19)For estimationsfejlen, der er uafhængig af Yt, gælder der ubetinget at:˜xt ≡ xt|t = xt − xt|t ∈ N(0, Pt|t) (7.20)
2Bevis: Vi ser umiddelbart at:xt0 ∈ N(m0, P0) (7.21)Vi antager derfor at:
xt|Yt ∈ N(xt|t, Pt|t) (7.22)Anvender vi sætning 3.16 fra den statistiske basis, har vi at:xt+1|Yt ∈ N(xt+1|t, Pt+1|t) = N(Φxt|t + Γut,ΦPt|tΦ
⊤ +R1) (7.23)Dette er netop tidsopdateringen af kalmanlteret. Lad os nu se på forholdene ved en da-taopdatering, d.v.s. når Yt → Yt+1 hvor Yt+1 = (Yt, yt+1). Observationsligningen giver osat:yt+1|xt+1 ∈ N(ϕ⊤
xt+1, R2) (7.24)

253En anvendelse af sætning 3.36 fra den statistiske basis resulterer i at:xt+1|yt+1, Yt = xt+1|Yt+1 ∈ N(xt+1|t+1, Pt+1|t+1) (7.25)hvor:
xt+1|t+1 = xt+1|t + κt+1[yt+1 − ϕ⊤xt+1|t] (7.26)
Pt+1|t+1 = [I − κt+1ϕ⊤]Pt+1|t (7.27)
κt+1 = Pt+1|tϕ[ϕ⊤Pt+1|tϕ+ r2]
−1 (7.28)Dermed er sætningen bevist vha. induktion. Fordelingen af estimationsfejlen følger ligeledesaf sætning 3.36. 2Bemærkning: 7.1 Bemærk, at idet xt|t (og xt+1|t) er en funktion af Yt (Yt) er xt|t (ogxt+1|t) uafhængig af xt|t (og xt+1|t). 2Bemærkning: 7.2 Bemærk, at den tidsmæssige opdatering (7.13) er præ is den sammesom i sætning 6.1 fra stokastiske systemer og at dataopdateringen (7.17) kan fortolkes somen tilbagekobling fra prædiktionfejlen,
εt = yt − ϕ⊤xt|t−1 (7.29)
2Bemærkning: 7.3 Bemærk, at det fordelagtige i at splitte opdateringerne i en tidsmæssigopdatering og en dataopdatering bl. a. består i en mulighed for at håndtere manglende ob-servationer. Man undlader blot at foretage dataopdateringen, når en observation mangler.Man kan tilsvarende på en enkel måde håndtere en situation, hvori antallet af målinger ikkeer konstant, dvs. hvor ϕ er tidsvarierende (har et tidsvarierende antal søjler). 2Bemærkning: 7.4 Bemærk, at forstærkningen, κt, ikke afhænger af data og kan beregnespå forhånd. Dette kan være en fordel i tilfælde med meget små samplingperioder. Til gengældkræver det, at det er muligt at lagre forstærkningssekvensen. 2Bemærkning: 7.5 Bemærk, at der i udledningen ikke er krævet at de indgående størrelserer konstante. Kalmanlteret gælder også for tidsvarierende systemer. 2Eksempel: 7.2 Lad os vende tilbage til målingen af den daglige vandmængde, qt, fra eksempel7.1. Antag, at vi kan modellere vandmængden med en første ordens model:qt+1 = aqt + vt qt0 ∈ N(m0, P0) vt ∈ N(0, r1) (7.30)Idet a = 0.98 modellerer vi udviklingen i qt som værende 98% af den forrige dags vandmængdeplus et stokastisk bidrag, der tager højde for at den første del af modellen ikke er præ is. Medhenblik på en undersøgelse af kalmanlterets følsomhed overfor forskellige størrelser, generaliserervi observationsligningen fra eksempel 7.1 til:yt = cqt + et et ∈ N(0, r2) Covvt , et = r12 (7.31)For det nominelle tilfælde er konstanterne:
a = 0.98 c = 1.0 r1 = 0.25 r2 = 1.25 (7.32)
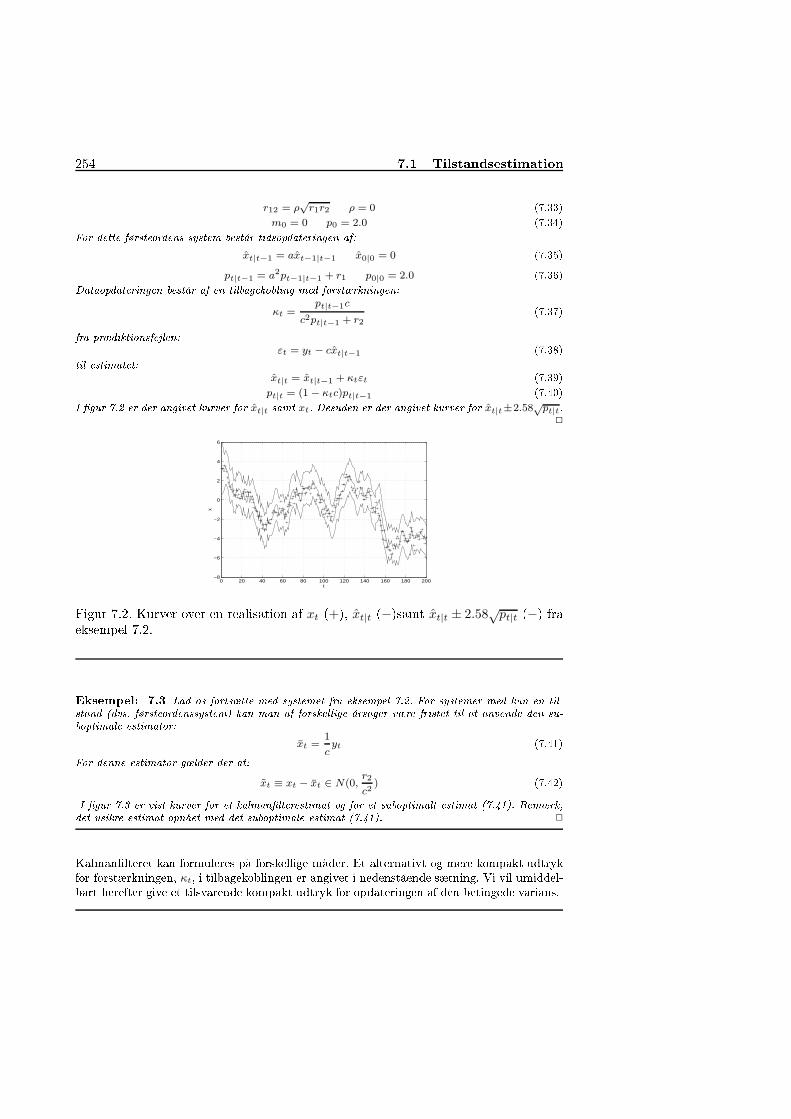
254 7.1 Tilstandsestimationr12 = ρ
√r1r2 ρ = 0 (7.33)
m0 = 0 p0 = 2.0 (7.34)For dette førsteordens system består tidsopdateringen af:xt|t−1 = axt−1|t−1 x0|0 = 0 (7.35)
pt|t−1 = a2pt−1|t−1 + r1 p0|0 = 2.0 (7.36)Dataopdateringen består af en tilbagekobling med forstærkningen:κt =
pt|t−1c
c2pt|t−1 + r2(7.37)fra prædiktionsfejlen:
εt = yt − cxt|t−1 (7.38)til estimatet:xt|t = xt|t−1 + κtεt (7.39)
pt|t = (1 − κtc)pt|t−1 (7.40)I gur 7.2 er der angivet kurver for xt|t samt xt. Desuden er der angivet kurver for xt|t±2.58√
pt|t.2
0 20 40 60 80 100 120 140 160 180 200−8
−6
−4
−2
0
2
4
6
x
tFigur 7.2. Kurver over en realisation af xt (+), xt|t (−)samt xt|t ± 2.58√
pt|t (−) fraeksempel 7.2.Eksempel: 7.3 Lad os fortsætte med systemet fra eksempel 7.2. For systemer med kun en til-stand (dvs. førsteordenssystem) kan man af forskellige årsager være fristet til at anvende den su-boptimale estimator:xt =
1
cyt (7.41)For denne estimator gælder der at:
xt ≡ xt − xt ∈ N(0,r2
c2) (7.42)I gur 7.3 er vist kurver for et kalmanlterestimat og for et suboptimalt estimat (7.41). Bemærk,det usikre estimat opnået med det suboptimale estimat (7.41). 2Kalmanlteret kan formuleres på forskellige måder. Et alternativt og mere kompakt udtrykfor forstærkningen, κt, i tilbagekoblingen er angivet i nedenstående sætning. Vi vil umiddel-bart herefter give et tilsvarende kompakt udtryk for opdateringen af den betingede varians.

2550 20 40 60 80 100 120 140 160 180 200
−5
0
5
x
t
Kalmanfilterestimat
0 20 40 60 80 100 120 140 160 180 200
−5
0
5
x
t
Suboptimalt estimat
Figur 7.3. Kurver fra eksempel 7.3 over et kalmanlterestimat og et suboptimaltestimatSætning: 7.3 Forstærkningen i dataopdateringen i kalmanlteret kan skrives på formen:κt+1 = Pt+1|t+1ϕR
−12 (7.43)
2Bevis: Delresultat fra sætning 3.23, blot substitueres:Px|y → Pt+1|t+1 Φ⊤ → ϕ Pv → R2 κ→ κt+1 (7.44)Udtrykket for den betingede varians kan redu eres en del og vi angiver derfor følgendesætning.Sætning: 7.4 Dataopdateringen af variansmatri en kan skrives på formen:
P−1t+1|t+1 = P
−1t+1|t + ϕR
−12 ϕ
⊤ (7.45)2Bevis: Delresultat fra sætning 3.23 med
Px|y → Pt+1|t+1 Φ → ϕ⊤
Pv → R2 (7.46)2Bemærkning: 7.6 Bemærk, at (7.45) sikrer at Pt+1|t+1 ≤ Pt+1|t. 2Ved at sammenholde forstærkningen i sætning 7.3 med opdateringen for P -matri en i sæt-ning 7.4, kan man se at den absolutte størrelse af variansen ikke har betydning for estima-tionsproblemet. Hvis vi skriver:
R2 = Σ2σ2
R1 = Σ1σ2
P = P σ2 (7.47)

256 7.1 Tilstandsestimationhvor σ er en skalar, er udviklingen af P og κ uafhængig af σ.Det skal bemærkes, at det ikke altid er hensigtsmæssigt at implementere opdateringen af Psom angivet i de ovenstående sætninger. Man kan af hensyn til de numeriske forhold medfordel anvende en kvadratrodsalgoritme, hvor:P = UDU
⊤ (7.48)hvor D er en diagonalmatrix og hvor U er en upper triangulær matrix. Opdateringen foregårda ved en opdatering af D og U . Se i øvrigt (Bierman 1977). Herved undgås bl.a. dennumerisk uheldige inversion som optræder i sætning 7.4.Eksempel: 7.4 Lad os fortsætte eksempel 7.2 for at undersøge variationen af variansen pt|t.For dette første ordens system har p (som vi senere skal se er variansen af estimationsfejlen) ifølgesætning 7.2 følgende tidsmæssige udvikling:pt|t−1 = a2pt−1|t−1 + r1 p0|0 = p0 = 2.0 (7.49)og følgende datamæssige:
κt =pt|t−1c
c2pt|t−1 + r2(7.50)
pt|t = (1 − ktc)pt|t−1 (7.51)De nævnte to varianser, pt|t og pt|t−1, har en udvikling, der er vist i gur 7.1. Det bemærkes at0 5 10 15
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
t
varia
ns
Figur 7.4. Plot af pt|t (∗) og pt|t−1 (+) fra eksempel 7.4.den prædiktive varians, pt|t−1, er større end pt|t. 27.1.1 KalmanlterEstimation af tilstande i et dynamisk system består som det er formuleret i sætning 7.2 afto sæt rekursioner, et sæt vedrørende den tidsmæssige opdatering og et sæt vedrørende dendatamæssige opdatering. Den tidsmæssige opdatering resulterer i et prædiktivt estimat,mens den datamæssige resulterer i det egentlige estimat. Man kan af forskellige årsagervælge at sammentrække den tidsmæssige og den datamæssige opdaterering i to kompakte
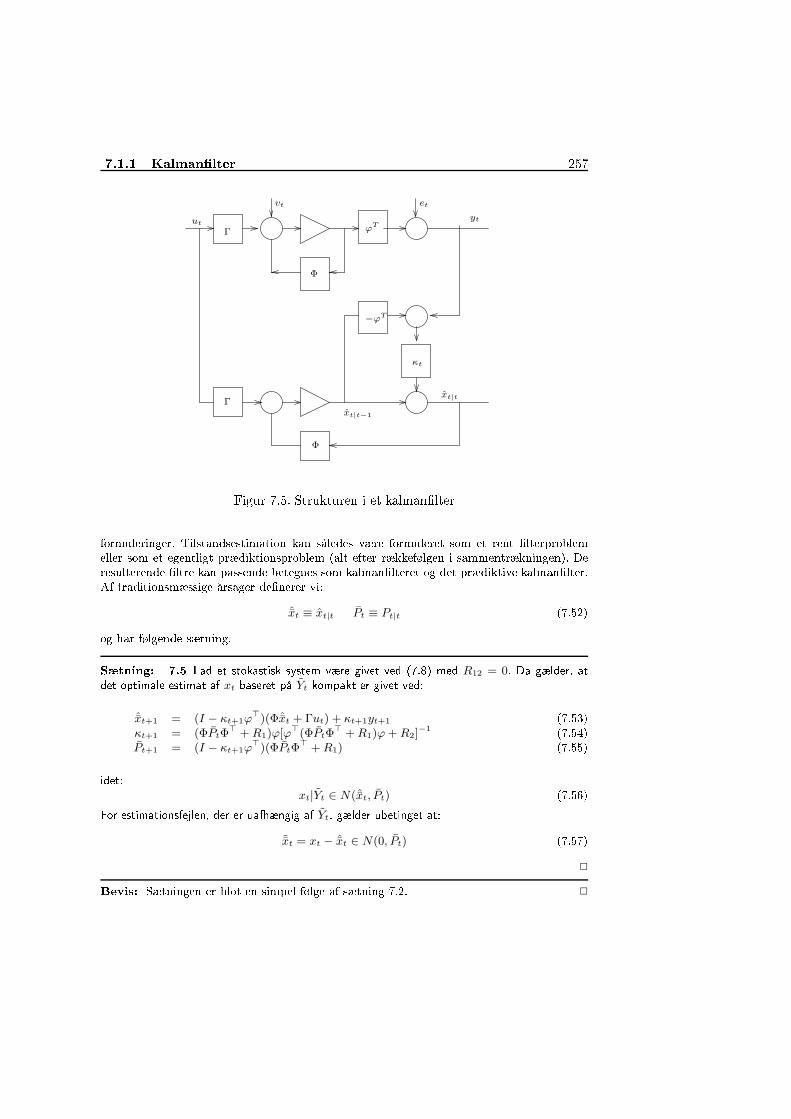
7.1.1 Kalmanlter 257
Φ
et
ut
Γ
Γ
−ϕT
κt
ϕTyt
vt
xt|t−1
xt|t
Φ
Figur 7.5. Strukturen i et kalmanlterformuleringer. Tilstandsestimation kan således være formuleret som et rent lterproblemeller som et egentligt prædiktionsproblem (alt efter rækkefølgen i sammentrækningen). Deresulterende ltre kan passende betegnes som kalmanlteret og det prædiktive kalmanlter.Af traditionsmæssige årsager denerer vi:ˆxt ≡ xt|t Pt ≡ Pt|t (7.52)og har følgende sætning.Sætning: 7.5 Lad et stokastisk system være givet ved (7.8) med R12 = 0. Da gælder, atdet optimale estimat af xt baseret på Yt kompakt er givet ved:
ˆxt+1 = (I − κt+1ϕ⊤)(Φˆxt + Γut) + κt+1yt+1 (7.53)
κt+1 = (ΦPtΦ⊤ +R1)ϕ[ϕ⊤(ΦPtΦ
⊤ +R1)ϕ+R2]−1 (7.54)
Pt+1 = (I − κt+1ϕ⊤)(ΦPtΦ
⊤ +R1) (7.55)idet:xt|Yt ∈ N(ˆxt, Pt) (7.56)For estimationsfejlen, der er uafhængig af Yt, gælder ubetinget at:
˜xt = xt − ˆxt ∈ N(0, Pt) (7.57)2Bevis: Sætningen er blot en simpel følge af sætning 7.2. 2
258 7.1 TilstandsestimationBemærkning: 7.7 Opdateringen af selve estimatet kan også skrives på formen:ˆxt+1 = Φˆxt + Γut + κt+1[yt+1 − ϕ
⊤(Φ¯xt + Γut)] (7.58)der ligger tættere på formuleringen i sætning 7.2 [side 252. 2Eksempel: 7.5 (Estimation af en konstant) Betragt et skalart system givet ved:xt+1 = xt x0 ∈ N(m0, p0) (7.59)yt = xt + et et ∈ N(0, σ2) (7.60)hvor et er uafhængig af xs for s ≤ t. Ud fra den indledende statistik ved vi konstanten, xt, kanestimeres med:
xt =1
t
tX
i=1
yi (7.61)Anvendes at:1
t + 1=
1
t− 1
t(t + 1)(7.62)kan (7.61) omskrives til rekursiv form, idet:
xt+1 =1
t + 1
t+1X
i=1
yi
= (1
t− 1
t(t + 1))
tX
i=1
yi +1
t + 1yt+1
= xt −1
t + 1xt +
1
t + 1yt+1eller ved:
xt+1 = xt +1
t + 1[yt+1 − xt] (7.63)Opskrives kalmanlteret (7.53)-(7.55) for systemet (7.59) (bemærk at R1 = 0) ndes at:
xt+1 = (1 − κt+1)xt + κt+1yt+1 = xt + κt+1(yt+1 − xt) (7.64)Forstærkningen, κt+1, er givet ved:κt+1 =
pt
pt + r2=
πt
πt + 1hvor πt =
pt
r2(7.65)Variansen udvikles efter:
pt+1 = (1 − κt+1)pt eller πt+1 = (1 − πt
πt + 1)πt =
π1
πt + 1(7.66)Betragtes præ isionen:
st =1
πt
=r2
pt
(7.67)giver (7.66) os at præ isionen udvikles efter:st+1 = st + 1 st0 =
r2
pt0
(7.68)og at:κt+1 =
1
st+1(7.69)hvormed kalmanlteret giver os at konstanten kan estimeres med:
xt+1 = xt +1
st+1(yt+1 − xt) (7.70)
st+1 = st + 1 (7.71)som for st0 = 0 er identisk med (7.63). 2
7.1.2 Det Prædiktive Kalmanlter 2597.1.2 Det Prædiktive KalmanlterI det forrige afsnit opstillede vi kalmanlteret, der blot er en kompakt metode til beregningaf den betingede forventning af xt baseret på Yt. I visse situationer kan det være fordelagtigtat basere estimatet af xt på Yt−1 og ikke på Yt. Man inkluderer med andre ord ikke densidste observation i estimatet. Dette prædiktive kalmanlter fremkommer blot ved ud frasætning 7.2, at opskrive en rekursion forxt ≡ xt|t−1 Pt ≡ Pt|t−1 (7.72)En af årsagerne til populariteten af denne type er bl.a. at denne type kalmanlter præ is harsamme form som en optimal observer. Desuden har den kraftige ligheder med kalmanlteretfor tidskontinuerte systemer.Sætning: 7.6 Lad et system være givet ved (7.8) med R12 = 0. Da er estimatet af xt+1baseret på Yt givet ved den betingede forventningsværdi. Endvidere er:xt+1|Yt ∈ N(xt+1, Pt+1) (7.73)hvor:
xt+1 = Φxt + Γut +Kt[yt − ϕ⊤xt] xt0 = m0 (7.74)
Kt = ΦPtϕ[ϕ⊤Ptϕ+R2]
−1 (7.75)Pt+1 = [Φ −Ktϕ
⊤]PtΦ⊤ +R1 Pt0 = P0 (7.76)For estimationsfejlen, der er uafhængig af Yt−1, gælder der ubetinget at:
xt ≡ xt − xt ∈ N(0, Pt) (7.77)2Bevis: Vi anvender først denitionen på xt og anvender tidsopdateringen (7.13) fra sætning7.2.
xt+1 ≡ xt+1|t = Φxt|t + Γut = Φxt|t−1 + κt[yt − ϕ⊤xt|t−1] + Γut
= Φxt + Γut + Φκt[yt − ϕ⊤xt]Forstærkningen, Kt bestemmes til:
Kt = Φκt = ΦPt|t−1ϕ[ϕ⊤Pt|t−1ϕ+R2]
−1
= ΦPtϕ[ϕ⊤Ptϕ+R2]
−1hvor notationen: Pt ≡ Pt|t−1 er anvendt. Betragt nu opdateringen af variansen:Pt+1 ≡ Pt+1|t = ΦPt|tΦ
⊤ +R1
= Φ[I − κtϕ⊤]Pt|t−1Φ⊤ +R1
= [Φ −Ktϕ⊤]PtΦ +R1
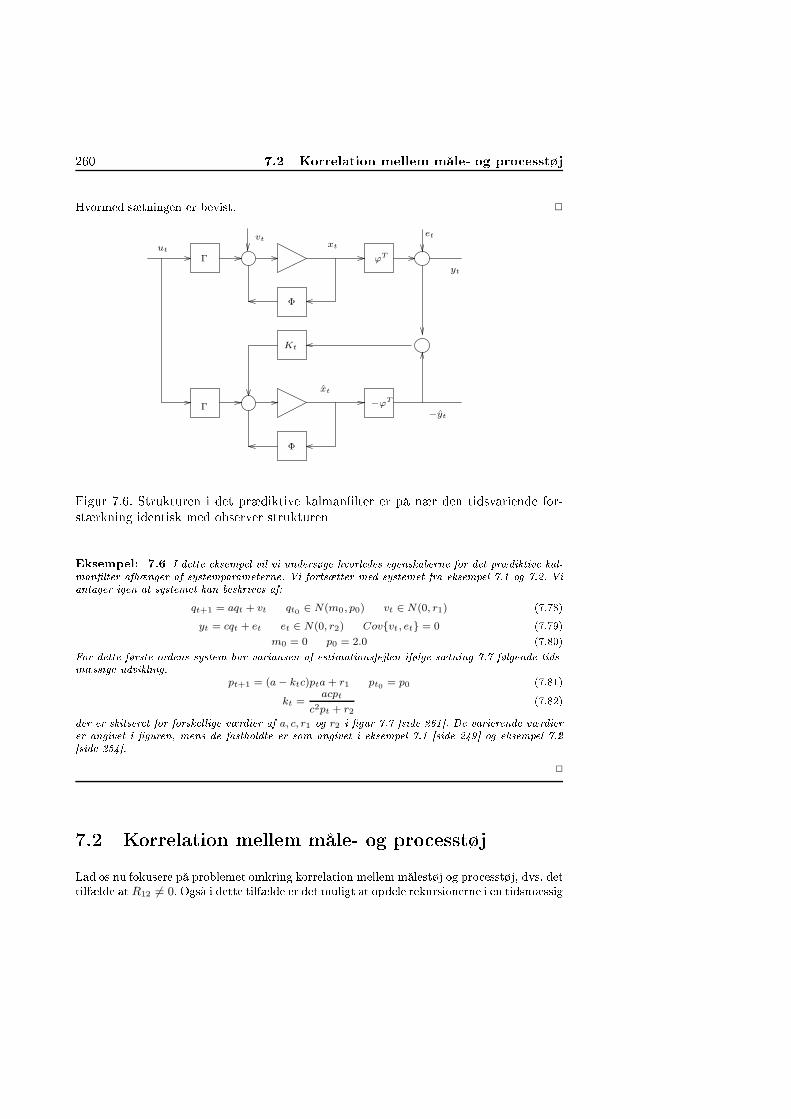
260 7.2 Korrelation mellem måle- og pro esstøjHvormed sætningen er bevist. 2
Kt
ut
Γ
vtxt
ϕT
et
yt
Φ
Γ
Φ
xt
−ϕT
−yt
Figur 7.6. Strukturen i det prædiktive kalmanlter er på nær den tidsvariende for-stærkning identisk med observer strukturenEksempel: 7.6 I dette eksempel vil vi undersøge hvorledes egenskaberne for det prædiktive kal-manlter afhænger af systemparameterne. Vi fortsætter med systemet fra eksempel 7.1 og 7.2. Viantager igen at systemet kan beskrives af:qt+1 = aqt + vt qt0 ∈ N(m0, p0) vt ∈ N(0, r1) (7.78)
yt = cqt + et et ∈ N(0, r2) Covvt , et = 0 (7.79)m0 = 0 p0 = 2.0 (7.80)For dette første ordens system har variansen af estimationsfejlen ifølge sætning 7.7 følgende tids-mæssige udvikling.
pt+1 = (a − ktc)pta + r1 pt0 = p0 (7.81)kt =
acpt
c2pt + r2(7.82)der er skitseret for forskellige værdier af a, c, r1 og r2 i gur 7.7 [side 261. De varierende værdierer angivet i guren, mens de fastholdte er som angivet i eksempel 7.1 [side 249 og eksempel 7.2[side 254.
27.2 Korrelation mellem måle- og pro esstøjLad os nu fokusere på problemet omkring korrelation mellem målestøj og pro esstøj, dvs. dettilfælde at R12 6= 0. Også i dette tilfælde er det muligt at opdele rekursionerne i en tidsmæssig
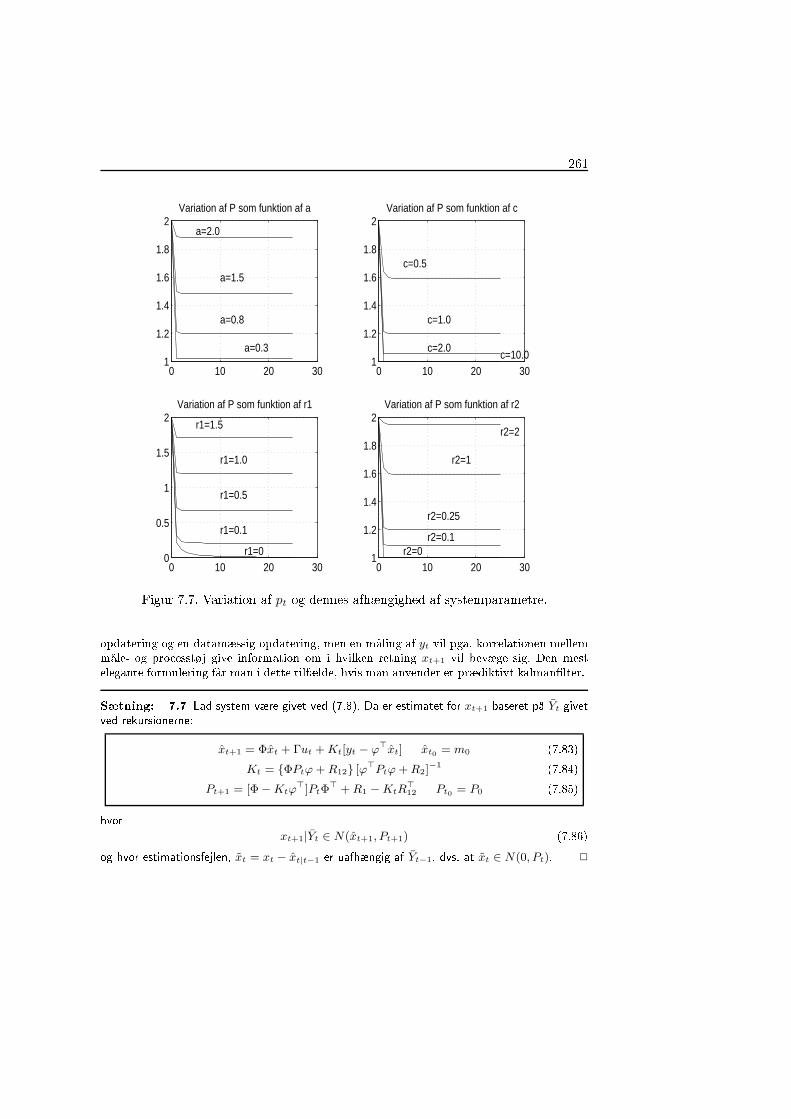
261
0 10 20 301
1.2
1.4
1.6
1.8
2Variation af P som funktion af a
a=2.0
a=1.5
a=0.8
a=0.3
0 10 20 301
1.2
1.4
1.6
1.8
2Variation af P som funktion af c
c=0.5
c=1.0
c=2.0c=10.0
0 10 20 300
0.5
1
1.5
2Variation af P som funktion af r1
r1=1.5
r1=1.0
r1=0.5
r1=0.1
r1=00 10 20 30
1
1.2
1.4
1.6
1.8
2Variation af P som funktion af r2
r2=2
r2=1
r2=0.25
r2=0.1r2=0Figur 7.7. Variation af pt og dennes afhængighed af systemparametre.opdatering og en datamæssig opdatering, men en måling af yt vil pga. korrelationen mellemmåle- og pro esstøj give information om i hvilken retning xt+1 vil bevæge sig. Den mestelegante formulering får man i dette tilfælde, hvis man anvender et prædiktivt kalmanlter.Sætning: 7.7 Lad system være givet ved (7.8). Da er estimatet for xt+1 baseret på Yt givetved rekursionerne:
xt+1 = Φxt + Γut +Kt[yt − ϕ⊤xt] xt0 = m0 (7.83)
Kt = ΦPtϕ+R12 [ϕ⊤Ptϕ+R2]
−1 (7.84)Pt+1 = [Φ −Ktϕ
⊤]PtΦ⊤ +R1 −KtR
⊤12 Pt0 = P0 (7.85)hvor
xt+1|Yt ∈ N(xt+1, Pt+1) (7.86)og hvor estimationsfejlen, xt = xt − xt|t−1 er uafhængig af Yt−1, dvs. at xt ∈ N(0, Pt). 2

262 7.2 Korrelation mellem måle- og pro esstøjBevis: Da vi ønsker at anvende sætning 3.19 fra den statistiske basis vil vi opskrive densimultane fordeling for xt+1 og yt betinget Yt−1. For middelværdierne har vi at:E
n
xt+1|Yt−1, ut
o
= E
n
Φxt + Γut|Yt−1, ut
o
= Φxt + Γut (7.87)E
n
yt|Yt−1, ut
o
= E
n
ϕ⊤xt + et|Yt−1, ut
o
= ϕ⊤xt (7.88)og tilsvarende for de betingede varianser at:
V arxt+1|Yt−1, ut = V arΦxt + Γut + vt|Yt−1, ut = ΦPtΦ⊤ +R1 (7.89)
V aryt|Yt−1, ut = V arϕ⊤xt + et|Yt−1, ut = ϕ
⊤Ptϕ+R2 (7.90)Vi mangler nu blot at bestemme den betingede kovarians mellem målingen, yt, og tilstan-dene, xt+1. Denne er:
Covyt, xt+1|Yt−1, ut = E
n
[yt − ϕ⊤xt][xt+1 − (Φxt + Γut)]
⊤|Yt−1, ut
o
= E
n
[ϕ⊤xt + et − ϕ
⊤xt]
×[Φxt + Γut + vt − (Φxt + Γut)]⊤|Yt−1, ut
o
= E
n
[ϕ⊤xt + et][Φxt + vt]
⊤|Yt−1, ut
o
= ϕ⊤PtΦ
⊤ +R⊤12Hermed er den simultane fordeling af yt og xt+1 givet ved:
xt+1
yt
ff˛
˛
˛
˛
Yt−1, ut ∈ N
„
Φxt + Γut
ϕ⊤xt
«
,
„
ΦPtΦ⊤ +R1 ΦPtϕ+R12
ϕ⊤PtΦ⊤ +R⊤
12 ϕ⊤Ptϕ+R2
«ffVed anvendelse af sætning 3.19 fra den statistiske basis har vi at:xt+1|yt, Yt−1, ut = xt+1|Yt ∈ N(xt+1, Pt+1) (7.91)hvor (med samme notation som i sætning 3.19):
xt+1 = mx + PxyP−1y (y − my)
= Φxt + Γut +Kt[yt − ϕ⊤xt]med forstærkningen:
Kt = PxyP−1y = ΦPtϕ+R12 [ϕ⊤
Ptϕ+R2]−1 (7.92)og variansen:
Pt+1 = Px − PxyP−1y P
⊤xy = Px −KtP
⊤xy
= ΦPtΦ⊤ +R1 −Kt[ϕ
⊤PtΦ
⊤ +R⊤12]
= [Φ −Ktϕ⊤]PtΦ
⊤ +R1 −KtR⊤12hvormed sætningen er bevist. 2

263Eksempel: 7.7 Lad os vende tilbage til målingen af den daglige vandmængde, qt, fra eksempel7.1. Vi antager at vandmængden følger:qt+1 = aqt + vt qt0 ∈ N(m0, P0) vt ∈ N(0, r1) (7.93)og at vi foretager målingen:yt = cqt + et et ∈ N(0, r2) Covvt , et = r12 (7.94)For det nominelle tilfælde er konstanterne:
a = 0.98 c = 1.0 r1 = 1.0 r2 = 0.25 (7.95)r12 = ρ
√r1r2 ρ = 0 p0 = 2.0 (7.96)For dette første ordens system har variansen af estimationsfejlen ifølge sætning 7.7 følgende tids-mæssige udvikling.
pt+1 = (a − ktc)pta + r1 − ktr12 pt0 = p0 (7.97)kt =
acpt + r12
c2pt + r2(7.98)I hosstående gur 7.5 [side 257 er tidsudviklingen af pt skitseret for forskellige værdier af ρ. Detbemærkes, at pt aftager mod nul for ρ = 1. 2
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Variation af P som funktion af rho
rho=1
rho=0.5
rho=0
rho=−0.5
rho=−1
Figur 7.8. Kurve over pt og dennes afhængighed af ρ.Også det prædiktive kalmanlter kan formuleres på forskellige måder. Vi har i nedenståendesætning samlet 3 typer af rekursioner for Pt.Sætning: 7.8 Estimationsfejlens varians fra sætning 7.7 udvikles efter en rekursion, der ogsåkan skrives på følgende måder.Pt+1 = ΦPtΦ
⊤ +R1 − (ΦPtϕ+R12)[ϕ⊤Ptϕ+R2]
−1(ΦPtϕ+R12)⊤ (7.99)
= ΦPtΦ⊤ +R1 −Kt[ϕ
⊤Ptϕ+R2]K
⊤t (7.100)
= ΦPtΦ⊤ +R1 −Kt[ΦPtϕ+R12]
⊤ (7.101)= (Φ −Ktϕ
⊤)PtΦ⊤ +R1 −KtR
⊤12
= (Φ −Ktϕ⊤)Pt(Φ −Ktϕ
⊤)⊤ +R1 +KtR2K⊤t −R12K
⊤t −KtR
⊤12 (7.102)hvor:
Kt = [ΦPtϕ+R12]h
ϕ⊤Ptϕ+R2
i−1 (7.103)2

264 7.2 Korrelation mellem måle- og pro esstøjBevis: Hvis skriver rekursionen (7.93) fra beviset for sætning 7.7 fuldt ud og indsætterudtrykket for forstærkningen (7.84) får vi (7.99), idet:Pt+1 = ΦPtΦ
⊤ +R1 −Kt[ϕ⊤PtΦ
⊤ +R12]= ΦPtΦ
⊤ +R1 − ΦPtϕ+R12 [ϕ⊤Ptϕ+R2]
−1[ϕ⊤PtΦ
⊤ +R12]Heri kan Kt let identi eres, hvorved (7.100) (7.101) fremkommer. Udskrives (7.102) fuldtud fås:Pt+1 = ΦPtΦ
⊤ −Ktϕ⊤PtΦ
⊤ − ΦPtϕK⊤t +Ktϕ
⊤PtK
⊤t ϕ
+R1 +KtR2K⊤t −KtR
⊤12 −R12K
⊤t
= ΦPtΦ⊤ +R1 +Kt[ϕ
⊤Ptϕ+R2]K
⊤t
−Kt[ϕ⊤PtΦ
⊤ +R⊤12] − [ΦPtϕ+R12]K
⊤tEn indsættelse af udtrykket (7.84) for Kt resulterer i:
Pt+1 = ΦPtΦ⊤ +R1 + [ΦPtϕ+R12]K
⊤t
−Kt[ϕ⊤PtΦ
⊤ +R⊤12] − [ΦPtϕ+R12]K
⊤t
= ΦPtΦ⊤ +R1 −Kt[ΦPtϕ+R12]
⊤Hvorved (7.101) fremkommer. 2Bemærk, at (7.102) er interessant fordi denne opdatering er gyldig for alle estimatorer, dersom det prædiktive kalmanlter har observer strukturen.Udvidelse: 15 Tilstandene i det tilsvarende tidskontinuerte system:x(tc) = Ax(tc) + Bu(tc) + v(tc) (7.104)
y(tc) = C⊤x(tc) + e(tc) (7.105)kan estimeres med et kalmanlter, der er givet ved:˙x(tc) = Ax(tc) + Bu(tc) + K(tc)[y(tc) − C⊤x(tc)] (7.106)med:
Ktc = [P (tc)C + R12]R−12 (7.107)Variansen, P (tc), på estimationsfejlen er givet ved dierentialligningen:
P (tc) = [A − K(tc)C]P (tc) + P (tc)[A − K(tc)C]⊤ + R1 (7.108)+K(tc)R2K⊤(tc) − K(tc)R
⊤12 − R12K⊤(tc) (7.109)hvor intensiteten af
„
vt
et
« er „
R1 R12
R⊤12 R2
« (7.110)2
2657.3 EstimationsfejlenI dette afsnit vil vi undersøge egenskaberne af estimationsfejlen,˜xt ≡ xt|t = xt − xt|t xt ≡ xt|t−1 = xt − xt|t−1 (7.111)Sætning: 7.9 Antag at et stokastisk system er givet ved (7.8) og at tilstandene estimeres medet kalmanlter som angivet i sætning 7.2 eller sætning 7.7. Da gælder der for estimationsfejlen,(7.111) at:˜xt = xt|t ∈ N(0, Pt) xt = xt|t−1 ∈ N(0, Pt) (7.112)og at ˜xt og xt er uafhængig af Yt henholdsvis Yt−1. 2Bevis: Sætningen følger simpelt af sætning 7.2 og 7.7. 2Ved at anvende (7.58) kan vi let vise at:˜xt+1 = (I − κt+1ϕ
⊤)(Φ˜xt + vt) − κt+1et+1 (7.113)og at:xt+1 = (Φ −Ktϕ
⊤)xt −Ktet + vt (7.114)hvor (7.74) er anvendt. Det bemærkes, at (7.113) og (7.114) er gyldig uafhængig af omκt+1 eller Kt er valgt optimalt (dvs. givet ved sætning 7.2 [side 252 eller sætning 7.7 [side261) eller ej. Det er følgelig muligt, i det generelle tilfælde (dvs. hvor forstærkningerne ikkenødvendigvis er optimale) at opskrive udviklingerne i middelværdi og varians. Der gælderat:
˜xt ∈ N(mt, Pt) xt ∈ N(mt, Pt) (7.115)hvor middelværdierne udvikles efter rekursionerne:mt+1 = (I − κt+1ϕ
⊤)Φmt mt+1 = (Φ −Ktϕ⊤)mt (7.116)For varianserne gælder udtrykkene:
Pt+1 = (I − κt+1ϕ⊤)(ΦPtΦ
⊤ +R1)(I − κt+1ϕ⊤)⊤ + κt+1R2κ
⊤ (7.117)og:Pt+1 = (Φ −Ktϕ
⊤)Pt(Φ −Ktϕ⊤)⊤ +KtR2K
⊤t +R1 (7.118)for kalmanlteret og det prædiktive kalmanlter, henholdsvis.7.4 PrædiktionsfejlenVi vil undersøge de statistiske egenskaber for prædiktionsfejlen, der optræder såvel i kal-manlteret som i det prædiktive kalmanlter. Prædiktionsfejlen εt, er en pro es, der erdeneret ved:
εt ≡ εt|t−1 = yt − ϕ⊤xt|t−1 = yt − ϕ
⊤xt xt ≡ xt|t−1 (7.119)

266 7.4 PrædiktionsfejlenDenne størrelse kan tolkes som fejlen mellem målingen yt og dennes prædiktion, ϕ⊤xt|t−1,der er baseret på Yt−1. Den betegnes derfor ofte som prædiktionsfejlen, eller innovationen.Denne stokastiske pro es har nogle interessante egenskaber, som vi har summeret i følgendesætning.Sætning: 7.10 Prædiktionsfejlen, εt, er tidsmæssig uafhængig og der gælder ubetinget:εt ∈ N(0, ϕ⊤
Pt|t−1ϕ+R2) (7.120)2Bevis: Vi anvender et resultat fra sætning 3.19 i den statistiske basis, nemlig at xt|t−1 og
Yt−1 er uafhængige. Dermed er:εt = yt − ϕ
⊤xt|t−1 = ϕ
⊤xt|t−1 + et (7.121)og Yt−1 også uafhængige. Vi kan indse at εt er normal fordelt med middelværdi:
E
n
εt|Yt−1
o
= E
n
εt
o (7.122)E
n
εt|Yt−1
o
= E
n
ϕ⊤xt|t−1 + et|Yt−1
o
= 0 (7.123)og varians:V arεt|Yt−1 = V arεt (7.124)
V arεt|Yt−1 = V arϕ⊤xt|t−1 + et|Yt−1 = ϕ
⊤Pt|t−1ϕ+R2 (7.125)Lad f. eks. s < t, da er εs|s−1 en lineær funktion af Ys−1. Da εt er uafhængig af Yt−1 er dendermed også uafhængig af Ys−1 og εs|s−1. Pro essen, εt er dermed hvid. 2Bemærk, at ovenstående sætning kun er gældende for deterministisk ϕ. Dette er tilfældeti forbindelse med tilstandsestimation. I de senere afsnit omkring estimation af parametre idynamiske systemer vil møde eksempler på at ϕ er stokastisk.Sætning 7.10 har to vigtige anvendelser, nemlig til:1 Modelvalidering.2 Fejldetektion.3 Repræsentation.I og med vi for korrekt model (Φ,Γ, ϕ, R1, R12, R2,m0 og P0) kender de statistiske egenskaberfor εt, kan vi i en given applikation blot teste om disse egenskaber er korrekte. Sædvanlig-vis estimeres kovariansfunktionen rε(τ ) og på grundlag heraf testes det om εt er en hvidstøjsekvens. Vi vil i del III om systemidentikation vende tilbage til modelvalidering.Eksempel: 7.8 Sætning 7.10 gælder under forudsætning af at systemet og modelbeskrivelsenstemmer overens. Er dette ikke tilfældet p.gr.a. systemændringer vil middelværdi og varians ikkevære som angivet i sætning 7.10. Det kan derfor være interessant af betragte signalet:
ζt =εt
p
R2 + ϕ⊤Ptϕ(7.126)

267der under forudsætning af at systembeskrivelsen er korrekt er normalfordelt med:ζt ∈ N(0, 1) (7.127)Er dette ikke tilfældet vil middelværdi (og varians) være ændret (være stiget). Dette kan anvendestil detektion af systemændringer eller fejldetektion. Da nu:
zt =NX
i=1
ζt−i+1 ∈ N(0, N) (7.128)vil vi alarmere for pro esændringer hvis:|zt| >
√Nf1− α
2(7.129)hvor fp er en p-fratil i N(0, 1)−fordelingen. Bemærk, at zt også kan skrives på formen:
zt =1 − q−N
1 − q−1ζt (7.130)Vi kan imidlertid også vælge at basere detektion på variansen. Der gælder at:
st =1
N
NX
i=1
ζ2t−i+1 ∈ χ2(N) (7.131)under forudsætning af at beskrivelsen er korrekt. Der alarmeres således for systemændringer, hvis:
st > fχ2(N)1−α (7.132)hvor f
χ2(N)p er en p−fraktil i en χ2(N)−fordeling. Bemærk, at st kan realiseres med ltreringen:
st1 − q−N
1 − q−1ζ2t (7.133)Fejldetektionen kan også baseres på CUSUM teknikken (se f.eks. (Spliid 1978)), der er en spe ielform for sekventieltestning. Studeres mekaniseringen af en CUSUM-detektion (se (Kemp 1962),(Hinkley 1971) eller (Poulsen 1985)) kan den resulterende detektor redu eret betydeligt. Lad γ og
B være to tuningparametre. Da kan en test baseret på middelværdiændring beskrives ved:z+t = max(z+
t−1 − γ
2+ ζt, 0) z−t = max(z−t−1 +
γ
2− ζt, 0) (7.134)hvor der alarmers for middelværdiændring, hvis:
maxz+t , z−t >
log(B)
γ(7.135)Tuningparameteren, B, har en fortolkning som den forventede periodelængde mellem fejlagtige a-larmer. Størrelsen γ, der også er en tuningparameter, er en middelværdi for hvilken alarmen skaludløses hurtigt. Mekaniseringen af en variansbaseret detektor er givet ved:
st = max(st−1 + ε2t − κ
κ − 1, 0) (7.136)hvor (i dette eksempel) κ er en variansforøgelse, som detektoren skal være følsom overfor. Alarme-ringen skal udløses, hvis:
st > 2κ
κ − 1log(B) (7.137)
2

268 7.4 PrædiktionsfejlenSom nævnt i de tidligere kapitler er der i vores udledninger ikke krav om at systemmatri erog fordelinger skal være tidsinvariante. Idet εt er en hvid støjsekvens kan systemet, (7.8),på ækvivalent form beskrives af følgende sæt dierensligninger:xt+1 = Φxt + Γut +Ktεt (7.138)
yt = ϕ⊤xt + εt (7.139)hvor tilstandene, x, ikke præ ist er de samme som i [side 251 (7.8). Denne tilstands re-præsentation af et stokastisk system har stor interesse af eres grunde. Den betegnes sominnovationsformen fordi den drives af innovationen, εt, der (for endelig t0) har en tidsva-riende varians jvf. (7.120). Under stationære forhold (for t0 → −∞) er Kt og variansen af
εt konstante.Antag at udgangspunktet for en analyse er en intern beskrivelse (på formen (7.8) og atstationære forhold er indtruet (f.eks. for t0 → −∞). Vi kan da på ækvivalent vis beskrivesystemet for formen (7.138), hvor K og variansen af εt er konstante (under den forudsattestationaritet). Det er derfor muligt at bestemme overføringsfunktioner fra ut og εt til yt ogdermed angive en ektern beskrivelse af systemet, dvs.:yt = Hs(q)ut +Hn(q)εt (7.140)hvor:
Hs(q) = ϕ⊤[qI − Φ]−1Γ Hn(q) = ϕ
⊤[qI − Φ]−1K + 1 (7.141)Udvidelse: 16 Antag, at en modellering af tidskontinuert, stokastisk system er endt med enbeskrivelse af typen
x(tc) = Ax(tc) + Bu(tc) + v(tc) v(tc) ∈ N(0, Σ1) (7.142)(tc ∈ R) med tidsdiskret (t ∈ Z) måling:
yt = C⊤x(tT ) + e(tT ) e(tT ) ∈ N(0, Σ2) (7.143)Denne beskrivelse vil i diskret tid være givet ved:xt+1 = Φxt + Γut + vt vt ∈ N(0, R1) (7.144)
yt = ϕ⊤xt + et et ∈ N(0, R2) (7.145)hvor matri erne er givet i udvidelse 12 og kan numerisk bestemmes med n2dn. Denne tidsdiskretebeskrivelse kan bringes på innovationsformen:xt+1 = Φxt + Γut + Kεt (7.146)
yt = ϕ⊤xt + εt (7.147)hvorεt ∈ N
“
0, ϕ⊤Pϕ + R2
”Her er K givet ved:K = [ΦPϕ + R12][ϕ⊤Pϕ + R2]−1 (7.148)og P er løsning til (den Algebraiske Ri ati liginig):
P = ΦPΦ⊤ + R1 − [ΦPϕ + R12][ϕ⊤Pϕ + R2]−1[ΦPϕ + R12]⊤ (7.149)Denne beskrivelse kan endeligt, som nævnt, skrives som:yt = ϕ⊤[qI − Φ]−1Γut +
n
ϕ⊤[qI − Φ]−1K + 1o
εt (7.150)Bemærk, at i forbindelse med externe modeller betegnes den drivende støj ofte med et og ikke somher med εt. 2

269Repræsentationen (7.138) har naturligvis en stor interesse af andre årsager. Antag, at viaf en eller anden grund har bragt systembeskrivelsen på innovationsformen (7.138). Da ertilstandsestimation meget simpel. Ved elimation af εt har vi estimatoren:xt+1 = Φxt + Γut +Kt[yt − ϕ
⊤xt] (7.151)der under forudsætning af at initialvariansen er korrekt er et kalmanlter.Eksempel: 7.9 Betragt en ARMAX beskrivelse på formen:
A(q−1)yt = B(q−1)ut + C(q−1)et (7.152)hvor et er sekvens af uafhængige N(0, σ2)−fordelte stokastiske variable, der er uafhængige af ysfor s ≤ t. Lad desuden:A(q−1) = 1 + a1q−1 + ... + anq−n (7.153)
B(q−1) = b1q−1 + ... + bnq−n (7.154)C(q−1) = 1 + c1q−1 + ... + cnq−n (7.155)Dette system kan beskrive observerkanonisk form (se del I, 1.4), dvs. ved:
xt+1 =
8
>
>
>
<
>
>
>
:
−a1 1 ... 0... . . .−an−1 0 ... 1−an 0 ... 0
9
>
>
>
=
>
>
>
;
xt +
8
>
>
>
<
>
>
>
:
b1b2...bn
9
>
>
>
=
>
>
>
;
ut +
8
>
>
>
<
>
>
>
:
c1 − a1
c2 − a2...cn − an
9
>
>
>
=
>
>
>
;
et (7.156)yt = (1, 0, ..., 0) xt + et (7.157)For denne beskrivelse er det let at opskrive et (prædiktivt) kalmanlter. I stationaritet gælder at:K∞ =
2
6
6
6
4
c1 − a1
c2 − a2...cn − an
3
7
7
7
5
(7.158)27.5 Stationære forholdVi har nu i ere eksempler set, hvorledes variansen og forstærkningen asymptotisk nær-mer sig en konstant værdi. I dette afsnit vil vi undersøge de stationære forholde, der fortidsinvariante systemer under visse forudsætninger indtræder for t0 → −∞.Lad os indledningsvis antage, at R12 = 0. Udviklingen i et kalmanlter (prædiktivt såvel somordinært) er karakteriseret ved den tidsmæssige udvikling af Pt og Pt. Disse rekursioner ergivet i (7.55) og (7.76). Under visse forudsætningerne konvergerer variansen mod en konstantværdi P∞ eller P∞ der opfylder at:
P∞ = ΦP∞Φ⊤ +R1 − (ΦP∞Φ⊤ +R1)ϕ×[ϕ⊤(ΦP∞Φ⊤ +R1)ϕ+R2]
−1
×ϕ⊤(ΦP∞Φ⊤ +R1) (7.159)

270 7.5 Stationære forholdhenholdsvis:P∞ = ΦP∞Φ⊤ +R1
−ΦP∞ϕ[ϕ⊤P∞ϕ+R2]
−1ϕ
⊤P∞Φ⊤ (7.160)Når varianserne konvergerer vil forstærkningerne konvergere mod:
κ∞ = (ΦP∞Φ⊤ +R1)ϕ[ϕ⊤(ΦP∞Φ⊤ +R1)ϕ+R2]−1 (7.161)
K∞ = ΦP∞ϕ[ϕ⊤P∞ϕ+R2]
−1 (7.162)Der gælder desuden at:P∞ = ΦP∞Φ⊤ +R1 P
−1∞ = P
−1∞ + ϕR
−12 ϕ
⊤ (7.163)Ligningerne (7.160) og (7.159) er algebraiske ligninger til bestemmelse af P∞ og P∞. Dissealgebraiske ligninger har ere løsninger, mens Pt og Pt kun konverger mod positive semi-denite løsninger til (7.160) og (7.159). Der eksisterer en lang række resultater vedrørendekonvergens af Ri atiligningen. Vi angiver her blot de vigtigste for det prædiktive kalman-lter.Sætning: 7.11 Antag, at (Φ, ϕ) er detekterbar. Da gælder at for ethvert P0 at:Pt → P∞ (7.164)hvor P∞ er en begrænset, positiv semidenit løsning til (7.160). 2Konvergens af Ri atiligningen er tæt knyttet til om hvorvidt pro esstøjen eksiterer allesystemets tilstande.Sætning: 7.12 Antag, at (Φ, R1) er styrbart og R2 > 0. Da gælder at (Φ, ϕ) er detekterbart,hvis og kun hvis1 Der eksisterer en entydig positiv denit løsning P∞ til (7.76), der er uafhængig af initi-alvariansen. Desuden er P∞ en entydig positiv denit løsning til (7.160).2 Egenværdierne til Φ −K∞ϕ
⊤ er beliggende strengt indenfor enheds irklen.2Bevis: Se (Lewis 1986b) side 101. 2Eksempel: 7.10 (Ordinær kalmanlter). Lad os igen betragte førsteordens tilfældet fra ek-sempel 7.2 [side 254. Fra (7.54) har vi ved indsættelse at forstærkningen i det ordinære kalmanlterer givet ved:
k =(a2p + r1)c
c2(a2p + r1) + r2(7.165)Dette udtryk kan indsættes i rekursionen [side 259 (7.76) for p, hvor den stationære varians kanndes som løsning til:
a2c2p2 +ˆ
r2 + c2r1 − a2r2˜
p − r1r2 = 0 (7.166)2
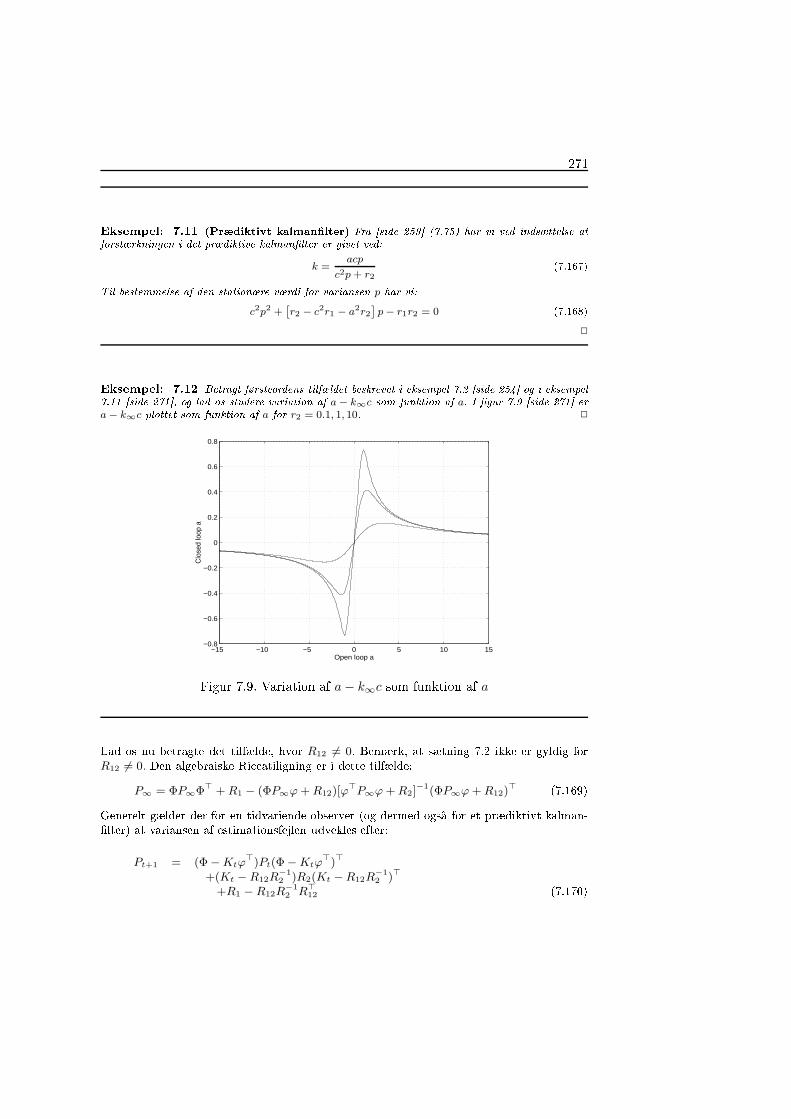
271Eksempel: 7.11 (Prædiktivt kalmanlter) Fra [side 259 (7.75) har vi ved indsættelse atforstærkningen i det prædiktive kalmanlter er givet ved:k =
acp
c2p + r2(7.167)Til bestemmelse af den stationære værdi for variansen p har vi:
c2p2 +ˆ
r2 − c2r1 − a2r2
˜
p − r1r2 = 0 (7.168)2Eksempel: 7.12 Betragt førsteordens tilfældet beskrevet i eksempel 7.2 [side 254 og i eksempel7.11 [side 271, og lad os studere variation af a − k∞c som funktion af a. I gur 7.9 [side 271 er
a − k∞c plottet som funktion af a for r2 = 0.1, 1, 10. 2
−15 −10 −5 0 5 10 15−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Clo
sed
loop
a
Open loop aFigur 7.9. Variation af a − k∞c som funktion af aLad os nu betragte det tilfælde, hvor R12 6= 0. Bemærk, at sætning 7.2 ikke er gyldig forR12 6= 0. Den algebraiske Ri atiligning er i dette tilfælde:
P∞ = ΦP∞Φ⊤ +R1 − (ΦP∞ϕ+R12)[ϕ⊤P∞ϕ+R2]
−1(ΦP∞ϕ+R12)⊤ (7.169)Generelt gælder der for en tidvariende observer (og dermed også for et prædiktivt kalman-lter) at variansen af estimationsfejlen udvekles efter:
Pt+1 = (Φ −Ktϕ⊤)Pt(Φ −Ktϕ
⊤)⊤
+(Kt −R12R−12 )R2(Kt −R12R
−12 )⊤
+R1 −R12R−12 R
⊤12 (7.170)
272 7.5 Stationære forholdSpe ielt for prædiktive kalmanlter gælder at:Kt = [ΦPtϕ+R12]
h
ϕ⊤Ptϕ+R2
i−1 (7.171)Det bemærkes, at hvis der eksisterer en fuldstændig korrelation mellem måle- og pro estøj,dvs. hvis:vt = Γ12et (7.172)hvilket medfører at:
R1 = Γ12R2Γ⊤12 R12 = Γ12R2 (7.173)er P = 0, K = Γ12 et stationært punkt for udviklingen af Pt.Sætning: 7.13 Under forudsætning af at Φ−Γ12ϕ
⊤ har egenværdier indenfor stabilitetsom-rådet gælder at:P∞ = 0 K∞ = Γ12 (7.174)
2Bevis: Overspringes. 2Eksempel: 7.13 Lad os fortsætte eksempel eksempel 7.9 [side 269. Vi ser at for observerkano-nisk form gælder at:P∞ = 0 K∞ =
2
6
6
6
4
c1 − a1
c2 − a2...cn − an
3
7
7
7
5
(7.175)Bemærk, at det karakteristiske polynomium til (Φ − K∞ϕ⊤) for den observerkanonisk form netoper:C(z) = znC(z−1) (7.176)der ikke har nulpunkter udenfor enheds irklen. 2Eksempel: 7.14 Betragt gur 7.8 [side 263 fra eksempel eksempel 7.7 [side 263. Der eksistererperfekt korrelation mellem pro es- og målestøj for ρ = ±1 (bemærk to tilfælde) men kun for ρ = 1vil pt → 0. Dette skyldes simpelt at egenværdierne til a− ρc er beliggende udenfor enheds irklen for
ρ = −1. 2Eksempel: 7.15 Lad os vende tilbage til eksempel 7.7. For t0 → −∞ vil kalmanlteret væretidsinvariant idet pt og kt vil konvergere mod konstante værdier, p∞ og k∞, henholdsvis. Disse kanndes ud fra at:pt+1 = pt = p∞ (7.177)Da nu pt og kt (jvf. (7.84)) udvikles efter:
pt+1 = (a − ktc)pta + r1 − ktr12 (7.178)kt =
acpt + r12
c2pt + r2(7.179)Ved at kombinere disse tre udtryk kan p∞ for dette førsteordens system bestemmes som den positiveløsning af andengradsligningen:
c2p2∞ +
ˆ
r2(1 − a2) − c2r1 + 2acr12˜
p∞ + r212 − r1r2 = 0 (7.180)
2

273Eksempel: 7.16 Antag, at referen esignalet wt kan variere i spring og at vi (eller regulatoral-goritmen) kun har kendskab til den aktuelle værdi (samt tidligere selvfølgelig). En passende modelfor denne situation er:xt+1 = xt + vt (7.181)
wt = xt (7.182)hvor observationen er perfekt. Anvendes et ordinært kalmanlter ndes (ikke overraskende) at detbedste estimat (for p0 = ∞) af referen en er:xt|t = wt (7.183)altså den sidst kendte værdi. Anvendes et prædiktivt kalmanlter, hvor estimationen baseres på
Yt−1, ndes at:xt|t−1 = wt−1 (7.184)
27.6 PrædiktionI det forrige har vi behandlet lterproblemet, dvs. bestemt et estimat for xt givet informa-tionen i Yt. Vi vil nu fokusere på prædiktionsproblemet som består i at estimere xt ud fraYs hvor t ≥ s. Løsningen på dette problem er givet ved sætning 7.14.I dette afsnit (afsnit 7.6) antager vi, at sekvensen af styresignaler er kendt. Dvs. de resultater,der angivet i dette afsnit er impli it betinget styresekvensen.Sætning: 7.14 Lad systemet være givet ved (7.8). Da er prædiktionen baseret på informa-tionen Ys af xt til tidspunktet t givet ved:
xt|s = E
n
xt|Ys
o
t ≥ s (7.185)hvor den betingede fordeling:xt|Ys ∈ N(xt|s, Pt|s) (7.186)udvikles efter rekursionerne:
xt+1|s = Φxt|s + Γut xs|s = E
n
xs|Ys
o (7.187)Pt+1|s = ΦPt|sΦ
T +R1 Ps|s = V arxs|Ys (7.188)2Bevis: Det følger af sætning sætning 7.1 [side 251 at den optimale estimator er givet denbetingede forventning. Idet:
xt+1 = Φxt + Γut + vt vt ∈ N(0, R1) (7.189)

274 7.6 Prædiktiongælder der, at hvis:xt|Ys ∈ N(xt|s, Pt|s) (7.190)da er jvf. sætning 3.21:
xt+1|Ys ∈ N(Φxt|s + Γut,ΦPt|sΦT +R1) (7.191)Da (7.190) er opfyldt for t = s er sætningen bevist. 2Bemærkning: 7.8 Bemærk, at rekursionerne præ is svarer til den tidsmæssige opdateringi kalmanlteret, dvs. de samme rekursioner som der gælder for udviklingen af middelværdiog varians for et stokastisk system. 2Bemærkning: 7.9 Bemærk, at prædiktoren kan etableres på følgende måde. Op til tids-punktet s anvendes et kalmanlter. Derefter udføres kun den tidsmæssige opdatering. 2Det bemærkes desuden at vi ved at anvende [side 47 (1.164) kan opskrive at:
xt = Φt−sxs + Wc(t− s)Us:t−1 + Wv(t− s)V t−1 (7.192)hvor:
U t−1 = (ut−1, ..., us)⊤
V t−1 = (vt−1, ..., vs)⊤ (7.193)
Wc(τ ) =`
Γ,ΦΓ, ...,Φτ−1Γ´
Wv(τ ) =`
I,Φ, ...,Φτ−1´ (7.194)Vi da følgende sætning:Sætning: 7.15 Estimat og varians fra [side 273 (7.187) og (7.188) kan opskrives på sluttetform:
xt|s = Φt−sxs|s + Wc(t− s)U t−1 (7.195)
Pt|s = Φt−sPs|s[Φ
t−s]⊤ + Wv(t− s)R1W⊤v (t− s) (7.196)hvor R1 = diag(R1, R1, ..., R1). 2Vi har bestemt forholdende for tilstandene. Lad os nu betragte systemudgangen. Vi harumiddelbart følgende sætning.Sætning: 7.16 Antag, at systemets udgang er givet ved:
yt = ϕ⊤xt + et et ∈ N(0, R2) (7.197)hvor pro essen et er en sekvens af ukorrelerede stokastiske variable, der er ukorrelerede med xτfor τ ≤ t. Antag at xt|Ys ∈ N(xt|s, Pt|s) og at R12 = E
n
vte⊤t
o. Da er prædiktionen af ytbaseret på Ys givet:yt|s = E
n
yt|Ys
o (7.198)
275For den betingede fordeling gælder at:yt|Ys ∈ N(µt|s, Qt|s) (7.199)hvor:
µt|s = ϕ⊤xt|s Qt|s = ϕ
⊤Pt|sϕ+R2 (7.200)
2Bevis: Beviset er analogt til beviset for sætning 4.5 [side 192 og er en simpel følge atsætning 3.14 [side 141. 2Ligesom for tilstandene kan vi give et sluttet udtryk for udgangen. Vi indfører:Yt = (ys, ys+1, ..., yt)
⊤ (7.201)Der gælder jvf. [side 237 (6.81) at:Yt = Wo(t− s)xs + Πt−sUt + Πt−sVt−1 + εt (7.202)hvor de indgående størrelser er givet i [side 237 (6.82)-(6.85).Sætning: 7.17 For udgangssekvensen gælder at:
Yt|Ys ∈ N(Yt|s,Σt|s) (7.203)hvor:Yt|s = Wo(t− s)xs + Πt−sUt (7.204)og hvor:
Σt|s = Wo(t− s)Ps|sW⊤o (t− s) (7.205)
+Πt−sR1Π⊤t−s + R2 (7.206)
+Πt−sR12 + R⊤12Π
⊤t−s (7.207)Her er R1 = diag(R1, R1, ..., R1) mens R2 og R12 er givet [side 238 (6.91). 27.7 Kalmanlter for ulineære systemerDe este tekniske systemer er ikke lineære i streng matematisk forstand. Det er en kendtteknik at linearisere en ulineær beskrivelse af et dynamisk system omkring et givet arbejds-punkt. Det er følgelig muligt at opstille et kalmanlter for denne lineariserede beskrivelse.Antag, at systemet er givet ved den følgende interne systembeskrivelse:
xt+1 = f(xt, ut, ζt, t) ζt ∈ F(0,Σ1) (7.208)yt = g(xt, ut, ξt, t) ξt ∈ F(0,Σ2) (7.209)

276 7.7 Kalmanlter for ulineære systemerOvenstående system kan lokalt beskrives ved:xt+1 = Φxt + Γut + vt vt ∈ F(0, R1) (7.210)yt = ϕ
⊤xt + ∆ut + et et ∈ F(0, R2) (7.211)hvor:
Φ = ∇xf Γ = ∇uf R1 = (∇ζf)Σ1(∇ζf)⊤ (7.212)ϕ = ∇xg ∆ = ∇ug R2 = (∇ξg)Σ2(∇ξ)
⊤ (7.213)For denne lineariseret beskrivelse er det muligt at opskrive en tilstandsestimator, enten iform af et kalmanlter eller et prædiktivt kalmanlter. Hvis en (f.eks. lineær) systembe-skrivelse indeholder et sæt ukendte parametre, er det muligt at udvide beskrivelsen, bl.a.tilstandsvektoren, xt, med disse ukendte parametre. Den resulterende beskrivelse er i alalmindelighed ulineær og det er mulig at estimere tilstande og parametre med udvidetkalmanlter, hvilket vi senere skal udnytte i forbindelse med systemidentikation.
Kapitel 8Filterteori - Ekstern beskrivelsePrædiktion er en selvstændig dis iplin indenfor den stokastiske systemteori og tidsrække-analysen. Spe ielt har forudsigelser indenfor økonometrien (aktiekurser mv.), varsling (aff.eks. stormoder og andre naturfænomener), energiproduktion og andre so iale og tekni-ske problemstillinger haft forskningens bevågenhed. Normalt vil prædiktionen indgå i enovervejelse omkring hvilke indgreb, der eventuelt skal eektueres. Man kan groft sige at dereksisterer en glidende overgang mellem den rene prædiktion og stokastisk kontrolteori, hvorindgrebet (styresignalet) er afstemt således at systemets prædiktive adfærd er i overens-stemmelse med kravspe ikationerne. Ved stormodsvarsling er indgrebet f.eks. omfangetaf en eventuel evakuering, der afstemmes således, at det forventede eller prædikterede taber i overensstemmelse med det a eptable, dvs. det optimale set i forhold til et bestemtkriterium.Indenfor stokastisk kontrolteori beskæftiger vi os med prædiktion af to spe ikke årsager.For det første fordi prædiktion er meget vigtigt i forbindelse med regulatorer, hvis designer baseret på en stokastisk systembeskrivelse. Desuden er systemidentikation meget tætknyttet til en models evne til at prædiktere systemets udgang.I kapitlet om stokastiske pro esmodeller så vi at der eksisterer mange måder hvorpå mankan karakterisere en stokastisk pro es. Det er muligt at karakterisere en stationær stokastiskpro es ved hjælp af dens spektrale tæthed eller dens kovariansfunktion. Man kan endviderekarakterisere en markovpro es ved en intern pro esmodel og vi fandt i kapitlet om lterte-orien metoder til at prædiktere en sådan pro es. Vi har ligeledes betragtet metoder til attransformere disse beskrivelser til f.eks. en ekstern beskrivelse. Her vil vi tage udgangspunkti en ekstern beskrivelse og angive en prædiktor for en stationær pro es.Det antages, at det aktuelle dynamiske system er et lineært, tidsinvariant skalart stokastiskesystem (skalart LTI-system). Som det er angivet i afsnit 6 [side 229 kan et LTI-systembeskrives af tre eksterne modeller, nemlig ved ARMAX-strukturen, BJ-strukturen og endeligved L-strukturen, hvoraf den sidste indeholder de to første. I dette kapitel vil vi udlederesultaterne for ARMAX-strukturen og derefter transformere dem til den mere generelle277

278 8.1 Prædiktion i ARMA-strukturenL-struktur. Vi antager at systemet kan beskrives af:A(q−1)yt = B(q−1)ut + C(q−1)et (8.1)hvor:A(q−1) = 1 + a1q
−1 + ...+ anaq−na (8.2)
C(q−1) = 1 + c1q−1 + ...+ cncq
−nc (8.3)Sædvanligvis trækkes tidsforsinkelsen gennem system ekspli it frem ogB(q−1) = q
kB(q−1) B(q−1) = b0 + b1q
−1 + ...+ bnbq−nb (8.4)hvor b0 6= 0. Dette kapitel afsluttes med af betragte L-strukturen:
A(q−1)yt =B(q−1)
F (q−1)ut +
C(q−1)
D(q−1)et (8.5)og prædiktion i denne. Her er yderligere F (0) = D(0) = 1.8.1 Prædiktion i ARMA-strukturenInden vi angiver prædiktorer for ARMAX-strukturen vil vi betragte det enklere problem atprædiktere i en ARMA-struktur.Sætning: 8.1 Lad yt være en stationær pro es, der er givet ved ARMA-modellen:
D(q−1)yt = C(q−1)et (8.6)hvor et er en sekvens af uafhængige F(0, σ2)-fordelte stokastiske variable, der er uafhængige afYt−1. Antag, at polynomierne D og C har alle nulpunkter indenfor enheds irklen og er moniske(C(0) = D(0) = 1). Minimalvariansprædiktoren er da givet ved:
yt+τ |t =S(q−1)
C(q−1)yt (8.7)med fejlen:
yt+τ |t = G(q−1)et+τ (8.8)Polynomierne, G og S, opfylder diophantineligningen:C(q−1) = D(q−1)G(q−1) + q
−τS(q−1) (8.9)med:
G(0) = 1 ord(G) = τ − 1 og ord(S) = Maxnd − 1, nc − τ (8.10)2

279Bevis: Fra sætning 7.1 ved vi at den optimale løsning til problemet under de nævnterestriktioner er givet ved den betingede forventning, dvs.:yt+τ = Eyt+τ |Yt (8.11)Vi udregner derfor at:
yt+τ =C(q−1)
D(q−1)et+τ = ht ⋆ et+τ =
∞X
i=0
hiet+τ−i (8.12)Da nu et+τ , ...et+1 er uafhængige af Yt vil vi opdele yt+τ i to bidrag:yt+τ =
τ−1X
i=0
hiet+τ−i +
∞X
i=τ
hiet+τ−i (8.13)=
τ−1X
i=0
hiet+τ−i +
∞X
i=0
hi+τet−i (8.14)hvor det første led er et glidende gennemsnit af de τ fremtidige støjbidrag, d.v.s.:τ−1X
i=0
hiet+τ−i = et+τ + h1et+τ−1 + ...+ hτ−1et+1 = G(q−1)et+τ (8.15)Vi har med lidt andre ord foretaget en polynomiedivision:C(q−1)
D(q−1)= G(q−1) +
q−τS(q−1)
D(q−1)(8.16)hvor S(q−1) udgør resten. Dette kan også skrives på formen:
C(q−1) = D(q−1)G(q−1) + q−τS(q−1) (8.17)hvor:
G(q−1) = 1 + g1q−1 + ... + gτ−1q
1−τ (8.18)Det bemærkes at:ord(G) = τ − 1 G(0) = 1 (8.19)Vi har nu at:
yt+τ = G(q−1)et+τ +S(q−1)
D(q−1)et (8.20)og der med pro esligningen giver at:
et =D(q−1)
C(q−1)yt (8.21)eller at:
yt+τ = G(q−1)et+τ +S(q−1)
C(q−1)yt (8.22)

280 8.1 Prædiktion i ARMA-strukturenDermed er den optimale prædiktion givet ved:yt+τ |t = Eyt+τ |Yt =
S(q−1)
C(q−1)yt (8.23)med fejlen:
yt+τ |t = G(q−1)et+τ (8.24)2Bemærkning: 8.1 Bemærk, at en forudsætning for at vi kan bestemme et ud fra (8.21)er at vi har observeret yt i prin ippet i uendelig lang tid. Når vi bestemmer et estimat af etved ltrere yt gennem den omvendte overføringsfunktion, vil estimatet asymptotisk nærmesig til et på en måde der er bestemt af nulpunkterne i C-polynomiet. 2Bemærkning: 8.2 Bemærk, at fejlen er en MA-pro es, der kan analyseres v.h.a. meto-derne fra Stokastiske Pro esmodeller. Vi kan bl. a. nde at variansen for prædiktionsfejlener:
V aryt+τ |t = σ2[1 + g
21 + ...+ g
2τ−1] (8.25)og at kovariansfunktionen, ry(m), (og korrelationsfunktionen) er nul for |m| > τ . 2Eksempel: 8.1 Antag, at referen en, som udgangen af et forelagt system skal følge, er givet ved:
wt =1
1 − q−1et (8.26)hvor et er en sekvens af uafhængige stokastiske variable. Den drivende støj er ikke gaussisk, menhar en ompoundfordeling som angivet i eksempel 3.8 [side 126.I gur 8.1 er en realisation af referen esignalet angivet. Bemærk, at signalet normalt (for η << 1)er konstant, men til tilfældige tidspunkter foretager spring af en tilfældig størrelse.
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
Figur 8.1. Realisation af referen en (optrukken) og 3-trinsprædiktionen (stiplet), dvs.wt|t−3.I forbindelse med regulering er det vigtigt at kunne inddrage referen ens videre udvikling i styrin-gen. Dette er enkelt hvis referen en er deterministisk og dermed entydigt bestemt i fremtiden. Hvis
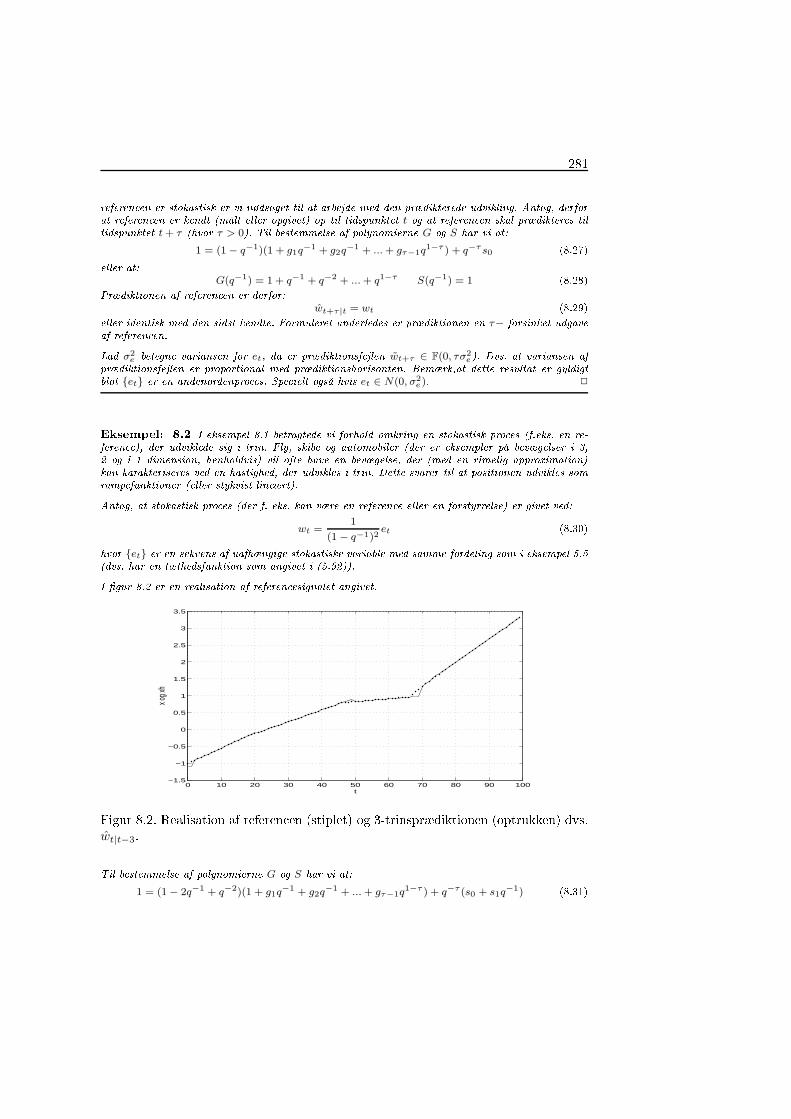
281referen en er stokastisk er vi nødsaget til at arbejde med den prædikterede udvikling. Antag, derforat referen en er kendt (målt eller opgivet) op til tidspunktet t og at referen en skal prædikteres tiltidspunktet t + τ (hvor τ > 0). Til bestemmelse af polynomierne G og S har vi at:1 = (1 − q−1)(1 + g1q−1 + g2q−1 + ... + gτ−1q1−τ ) + q−τ s0 (8.27)eller at:
G(q−1) = 1 + q−1 + q−2 + ... + q1−τ S(q−1) = 1 (8.28)Prædiktionen af referen en er derfor:wt+τ |t = wt (8.29)eller identisk med den sidst kendte. Formuleret anderledes er prædiktionen en τ− forsinket udgaveaf referen en.Lad σ2
e betegne variansen for et, da er prædiktionsfejlen wt+τ ∈ F(0, τσ2e). Dvs. at variansen afprædiktionsfejlen er proportional med prædiktionshorisonten. Bemærk,at dette resultat er gyldigtblot et er en andenordenpro es. Spe ielt også hvis et ∈ N(0, σ2
e). 2Eksempel: 8.2 I eksempel 8.1 betragtede vi forhold omkring en stokastisk pro es (f.eks. en re-feren e), der udviklede sig i trin. Fly, skibe og automobiler (der er eksempler på bevægelser i 3,2 og i 1 dimension, henholdvis) vil ofte have en bevægelse, der (med en rimelig approximation)kan karakteriseres ved en hastighed, der udvikles i trin. Dette svarer til at positionen udvikles somrampefunktioner (eller stykvist lineært).Antag, at stokastisk pro es (der f. eks. kan være en referen e eller en forstyrrelse) er givet ved:wt =
1
(1 − q−1)2et (8.30)hvor et er en sekvens af uafhængige stokastiske variable med samme fordeling som i eksempel 5.5(dvs. har en tæthedsfunktion som angivet i (5.92)).I gur 8.2 er en realisation af referen esignalet angivet.
0 10 20 30 40 50 60 70 80 90 100−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
x og x
h
tFigur 8.2. Realisation af referen en (stiplet) og 3-trinsprædiktionen (optrukken) dvs.wt|t−3.Til bestemmelse af polynomierne G og S har vi at:
1 = (1 − 2q−1 + q−2)(1 + g1q−1 + g2q−1 + ... + gτ−1q1−τ ) + q−τ (s0 + s1q−1) (8.31)

282 8.2 Prædiktion i ARMAX-strukturenVed hjælp af f.eks. induktion kan det ndes at:G(q−1) = 1 + 2q−1 + 3q−2 + ... + τq1−τ S(q−1) = (τ + 1) − τq−1 (8.32)Prædiktionen af referen en er derfor givet ved:
wt+τ |t = wt + τ(wt − wt−1) (8.33)dvs. en lineær ekstrapolation. Hvis et ∈ F(0, σ2e) vil prædiktionsfejlen være:
wt|t−τ ∈ F(0, (
τX
i=1
i2)σ2e) (8.34)Dette er spe ielt også tilfældet hvis et ∈ N(0, σ2
e). 28.2 Prædiktion i ARMAX-strukturenLad os nu vende tilbage til det oprindelige problem. Antag, at det forelagte dynamiskesystem kan styres og antag, at dette er beskrevet ved (8.1), dvs. ved:A(q−1)yt = q
−kB(q−1)ut +C(q−1)et (8.35)hvor et er en sekvens af uafhængige F(0, σ2)-fordelte stokastiske variable, der er uafhængigeaf Yt−1.Hvis vi betragter forholdene ved tidspunktet t, da er ut bestemmende for forholdene vedtidspunktet t + k og fremefter. Lad os derfor først bestemme en prædiktion for yt+k, dvs.prædiktionen med en horisont, der er identisk med tidsforsinkelsen, k, gennem systemet.Denne k−trins prædiktion er givet ved følgende sætning.Sætning: 8.2 Lad systemet være beskrevet ved (8.35). Da er k-trins prædiktionen af y givetved:
yt+k|t =1
C(q−1)
˘
B(q−1)G(q−1)ut + S(q−1)yt
¯ (8.36)med fejlen:yt+k|t = G(q−1)et+k (8.37)hvor polynomierne, G og S, er givet som løsninger til:
C(q−1) = A(q−1)G(q−1) + q−kS(q−1) (8.38)med:
G(0) = 1 ord(G) = k − 1 og ord(S) = Maxna − 1, nc − k (8.39)2

283Bevis: Når vi anvender designligningen:C = AG+ q
−kS (8.40)kan vi for yt+k opskrive at:
yt+k =1
C
n
AG+ q−kSo
yt+k (8.41)=
1
CGAyt+k + Syt (8.42)Anvender vi systemligningen (8.21) får vi at:
yt+k =1
CG [But + Cet+k] + Syt (8.43)
=1
CBGut + Syt +Get+k (8.44)
2Det bemærkes, at denne prædiktor med B ≡ 0 er (for τ = k) identisk med prædiktoren isætning 8.1.Lad os nu betragte prædiktorer der ikke nødvendigvis har en horisont identisk med tidsfor-sinkelsen gennem systemet. Vi generaliserer til prædiktorer med horisonter τ > 0.Sætning: 8.3 Antag, at systemet er givet ved en ARMAX struktur jvf (8.35). τ -trinprædiktion(τ > 0) er da givet ved:
yt+τ |t =1
C(q−1)
`
B(q−1)G(q−1)ut+τ−k + S(q−1)yt
´ (8.45)med fejlen:yt+τ |t = G(q−1)et+τ (8.46)Her er polynomierne, G(q−1) og S(q−1), givet som løsninger til ligningen:
C(q−1) = A(q−1)G(q−1) + q−τS(q−1) (8.47)hvor:
G(0) = 1 ord(G) = τ − 1 ord(S) = Maxna − 1, nc − τ (8.48)2Bevis: Beviset er analogt til beviset for sætning 8.2, blot er k erstattet af τ . 2Det bemærkes, at for τ > k vil prædiktionen involvere fremtidige input-signaler. Vi anførerderfor følgende sætning.
284 8.3 Prædiktion i L-strukturenSætning: 8.4 Antag, at systemet er givet ved en ARMAX struktur jvf (8.35). τ -trinprædiktion(τ > k) kan da skrives som:
yt+τ |t =1
C(q−1)
`
R(q−1)ut + S(q−1)yt
´
+ G(q−1)ut+τ−k (8.49)med fejlen:yt+τ |t = G(q−1)et+τ (8.50)Her er polynomierne, G(q−1) og R(q−1), givet som løsninger til ligningen:
B(q−1)G(q−1) = C(q−1)G(q−1) + qk−τ
R(q−1) (8.51)hvor:ord(G) = τ − k − 1 ord(R) = Maxnc − 1, nb + k − 1 (8.52)
2Bevis: Der anvendes blot sætning 8.1 [side 278 på BGC. 28.3 Prædiktion i L-strukturenLad os nu fokusere på den generelle L-struktur, hvor:
A(q−1) = q−kB(q−1)
F (q−1)ut +
C(q−1)
D(q−1)et (8.53)hvor et er et hvidt støjsignal, der er uafhængigt af Yt−1. Vi angiver først k−trinsprædik-tionen.Sætning: 8.5 Antag, at det aktuelle system er givet på L-strukturen jvf. (8.53). Da er
k−trinsprædiktionen givet ved:yt+k|t =
1
C
»
D
FBGut + Syt
– (8.54)med fejlen:yt+k|t = Get+k (8.55)Polynomierne, G og S, er løsninger til diophantineligningen:
C = ADG+ q−kS (8.56)hvor
G(0) = 1 ord(G) = k − 1 ord(S) = max(na + nd − 1, nc − k) (8.57)2
285Bevis: Vi bringer først L-strukturen på ARMAX-formen, dvs.ADFyt = q
−kBDut + CFet (8.58)og anvender sætning 8.2 [side 282, hvor vi efter en substitution skal løse:
CF = ADFG+ q−kS (8.59)Her ser vi, at F er en faktor i de to ud af tre led. Dermed må S = SF . 2Lad os så betragte en prædiktionshorisont, der ikke nødvendigvis er identisk med tidsfor-sinkelsen gennem systemet.Sætning: 8.6 Antag, at det aktuelle system er givet ved L-strukturen (8.53). Da er τ−trinsprædiktionen
(τ > 0) givet ved:yt+τ |t =
1
C
»
D
FBGut+τ−k + Syt
– (8.60)med fejlen:yt+τ |t = Get+τ (8.61)Polynomierne, G og S, er løsninger til diophantineligningen:
C = ADG+ q−τS (8.62)hvor:
G(0) = 1 ord(G) = τ − 1 ord(S) = max(na + nd − 1, nc − τ ) (8.63)2Bevis: Beviset er en gentagelse af beviset for sætning 8.5 [side 284, blot med k erstattetaf τ . 2Ligesom i ARMAX-tilfældet vil en prædiktionshorisont større end tidsforsinkelsen gennemobjektet involvere fremtidige styresignaler. Vi anfører derfor i fuldstændig analogi med sæt-ning 8.4 [side 284 følgende.Sætning: 8.7 Antag, at det forelagte system er givet ved (8.53). Da er τ−prædiktionen for
(τ ≥ k) givet ved:yt+τ |t =
1
C
»
1
FRut + Sy
–
+ Gut+τ−k (8.64)med fejlen:yt+τ |t = Get+τ (8.65)hvor polynomierne G og S er givet i sætning 8.4 [side 284 og hvor polynomierne, G og R, erløsninger til:
BDG = CFG+ qk−τ
R (8.66)hvor:ord(G) = τ − k − 1 ord(R) = max(nc + nf − 1, nb + nb + 2k − τ − 1) (8.67)
2Bevis: Sætningen følger direkte af sætning 8.1 [side 278 og sætning 8.6 [side 285. 2
286 8.3 Prædiktion i L-strukturen

Kapitel 9Stokastisk Regulering - InternBeskrivelseVi vil i dette kapitel beskæftige os med regulering af dynamiske systemer, der er påvirketaf stokastiske forstyrrelser. I dette kapitel vil vi antage, at systemets og forstyrrelsernesbeskrivelse er kendt (og er på intern form). I noternes tredie del (systemidentikation)vil vi betragte metoder til at bestemme en model for system og forstyrrelser.Reguleringsproblemet er karakteriseret ved en angivelse af en beskrivelse af system og destokastiske forstyrrelser, reguleringskriterium og de restriktioner, som styringen er underlagt.System og påvirkninger. Det antages, at det aktuelle reguleringsobjekt er beskrevet afxs(t+ 1) = Φsxs(t) + Γsut + ξ1(t) (9.1)
yt = ϕ⊤s xs(t) + ξ2(t) (9.2)hvor ξ1(t) og ξ2 er pro es- og udgangsstøj, henholdsvis. Udgangsvektoren yt indeholder delsde størrelser vi er interesseret i at styre og dels størrelser, der tilvejebringer information omsystemets tilstande. Disse kan eventuelt være sammenfaldende.Vi har i de tidligere afsnit betragtet metoder til at udvide tilstandsrummet og dermed bringebeskrivelsen på standardformen:
xt+1 = Φxt + Γut + vt vt ∈ Niid(0, R1) xt0 ∈ N(m0,Σ0) (9.3)yt = ϕ
⊤xt + et et ∈ Niid(0, R2) (9.4)hvor støjsignalerne er uafhængige af xs for s ≤ t. Den udvidede tilstandsvektor indehol-der både systemtilstande og tilstande, der indgår i modellerne for forstyrrelserne, herundermålestøjen.Af disse modeller er modellen for et eventuelt referen esignal interessant. I (den udvidede)tilstandsvektoren kan vi desuden have inkluderet forskellige hjælpevariable. Man kan f.eks.287

288 8.3 Prædiktion i L-strukturenhave inkluderet en tilstand, der svarer til en summering af forskellen mellem en systemudgangog det tilsvarende referen esignal (integralvirkning).Kriterium. Standardproblemet består i at bestemme en styrestrategi, dvs. en sekvens afstyreindgreb ut således at kriterietJt0 = E
(
NX
t=t0
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
) (9.5)antager sit minimum. Det antages at Q1 og Q2 er positivt semidenite. Den resulterende op-timale strategi betegnes som en LQ- (Linear Quadrati ) eller en LQG-regulering (LinearQuadrati Gaussian) afhængig af de aktuelle restriktioner. Kriteriet (9.5) er ret generelt ogindeholder mange interessante spe ialtilfælde bl.a. fordi vægt matri erne Q1, Q12 og Q2 kanvære tidsvarierende.I de prædiktive strategier bestemmes styreindgrebet ut således at kriterietJt = E
(
NX
τ=t
“
x⊤τ u
⊤τ
”
»
Q1 Q12
Q⊤12 Q2
–„
xτ
uτ
«
) (9.6)er minimalt. I disse strategier omformes kriterier af ovenstående form til et (stokastisk)statisk minimeringsproblem. Beslutningsvariablene, dvs. de størrelser der står til rådighedfor optimeringen, er i dette tilfælde en sekvens af (prædikterede) styreindgreb. Kun uteektueres. Eektueringen af ut+1 sker på basis af en minimering af Jt+1 og er baseret påinformation om systemets tilstand, der er tilgængelig til t+1. En regulering baseret på (9.6)betegnes som en GPC-regulering (General Predi tive Control). Hvis der kun fokuseres pået fremtidigt tidspunkt betegnes reguleringen blot som PC-regulering.t0 t NN t τDe to typer regulering har meget store lighedspunkter. I begge strategier sker bestemmelsenaf det aktuelle styreindgreb, ut på basis af tilgængelig information. Imidlertid påvirker utikke kun forholdene til t + 1, men også efterfølgende tidspunkter. Forskellen mellem GPC-og LQ-regulering består i hvorledes der i bestemmelsen af ut tages højde for fremtidigestyringer. I GPC-styringen er optimeringen baseret på prædiktion, mens den i LQ- (ogLQG-) styringen er baseret på at fremtidige styringer også er optimale (og baseret på dentil det tidspunkt gældende information om systemets tilstand.)Nedenstående sætning viser, at det er muligt at formulere standardproblemet lidt simplere.Imidlertid opnås simplikationen på bekostning af en tidsvarierende systembeskrivelse, hviskriteriefunktionen ikke er konstant.Sætning: 9.1 En styring af systemet
xt+1 = Φxt + Γut + vt (9.7)

289efter kriterietJ = E
X
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«ff (9.8)er ækvivalent med en styring af systemetxt+1 = Φxt + Γut + vt (9.9)efter kriteriet
J = En
X
x⊤t Q1xt + u
⊤t Q2ut
o (9.10)hvor:ut = ut +Q
−12 Q
⊤12xt Q1 = Q1 −Q12Q
−12 Q
⊤12 Φ = Φ − ΓQ−1
2 Q⊤12 (9.11)
2Bevis: Vi indleder med at indføre:ut = ut +Q
−12 Q
⊤12xt (9.12)Hermed bliver kriteriet
J = En
X
x⊤t Q1xt + u
⊤t Q2ut + x
⊤t Q12ut + u
⊤t Q
⊤12xt
o
= En
X
x⊤t
h
Q1 −Q12Q−12 Q
⊤12
i
xt + u⊤t Q2ut
o
2I (9.5) og (9.6) har vi formuleret problemet som en styring af systemets tilstande. Vi kunneogså have formuleret LQ-problemet som en styring af systemets udgang, dvs. en minimeringaf kriterietJt0 = E
(
NX
t=t0
“
y⊤t u
⊤t
”
»
O1 O12
O⊤12 O2
–„
yt
ut
«
) (9.13)Ved GPC-reguleringen kunne vi anvende kriterietJt = E
(
NX
τ=t
“
y⊤τ u
⊤τ
”
»
O1 O12
O⊤12 O2
–„
yτ
uτ
«
) (9.14)hvor O1 og Q2 er positivt semidenite. De to udgangskriterier er identisk med (9.5) hen-holdvis (9.6), hvisQ1 = ϕO1ϕ
⊤Q12 = ϕO12 Q2 = O2 (9.15)og hvis målestøjen er ukorreleret med systemtilstandene (som forudsat i det tidligere).Eksempel: 9.1 Antag, at systemudgangen yt består af 3 størrelser:
yt =
2
4
y1
y2
y3
3
5
t
(9.16)

290 8.3 Prædiktion i L-strukturenhvor y1 og y2 er målinger, der tilvejebringer information om systemets tilstande, og hvor y1 og y3er størrelser, hvis forventede kvadratsum vi ønsker at minimere (dvs. som vi ønsker at styre). Viønsker således at minimereJ = E
n
z⊤t+1zt+1
o hvor zt =
»
1 0 00 0 1
–
yt = ϕ⊤z yt (9.17)Dette er ækvivalent med at minimere:
J = En
y⊤t Oyt
o
= E˘
y21 + y2
3
¯ (9.18)hvor:O = ϕzϕ⊤
z =
8
<
:
1 0 00 0 00 0 1
9
=
;
(9.19)2Eksempel: 9.2 Lad os fortsætte eksempel 9.1. Antag, at vi i reguleringen lægger en vægt ρ påstyringen af y3, dvs. styrer systemet således at:
J = E˘
y21 + ρ2y2
3
¯ (9.20)er minimal. Dette svarer til at minimere:J = E
n
y⊤t Oyt
o (9.21)hvor:O =
8
<
:
1 0 00 0 00 0 ρ2
9
=
;
(9.22)Dette svarer også til en minimering af:J = E
n
z⊤t zt
o hvor zt =
»
1 0 00 0 ρ
–
yt = ϕ⊤z yt (9.23)hvor O = ϕzϕ⊤
z . Dette kan også skrives på formen:J = Ex⊤Q1xt for Q1 = ϕϕzϕ⊤
z ϕ⊤ = ϕOϕ⊤ (9.24)som angivet i bemærkning 9.10. 2Eksempel: 9.3 Lad os betragte et førsteordens system givet ved pro esligningenxt+1 = axt + but + vt (9.25)hvor vt på sædvanligvis er hvid støj og hvor vt er uafhængig af xs for s ≤ t. Dette system øn-skes styret således at fejlen mellem xt og et referen esignalet wt er minimal. Der indføres derforstørrelsen zt hvor:
zt = xt − wt (9.26)Det antages at referen ens udvikling kan beskrives med:wt+1 = wt + ηt (9.27)hvor ηt er en ompoundfordeling som angivet i eksempel 3.8 [side 126. Det antages, at ηt eruafhængig af xs og ws for s ≤ t. Dvs. at wt har en udvikling som skitseret i eksempel 8.1 [side

291281 (hovedsagelig er konstant, men til tilfældige tidspunkter ændrer værdi). For at udkompensereen konstant forstyrrelse og/eller for at undgå en DC-fejl indføres en integraltiltand it,it+1 = it + xt − wt (9.28)Indføres nu den udvidede tilstandsvektor
x =
2
4
xt
wt
it
3
5 (9.29)kan det totale system beskrives ved:xt+1 =
2
4
a 0 00 1 01 −1 1
3
5 xt +
2
4
b00
3
5ut +
2
4
vt
ηt
0
3
5 (9.30)der er på sammen form som (9.3). VælgesQ1 =
2
4
1 −1 0−1 1 00 0 ρ
3
5 (9.31)i [side 288 (9.5) vil dette svare til et kriterium af formenJt0 = E
8
<
:
NX
t=t0
(xt − wt)2 + ρi2t
9
=
;
(9.32)hvor ρ er en vægt mellem direkte fejl og integralvirkning. 2Bemærk, at teknikken i eksempel 9.3 består i at transformere det aktuelle problem til stan-dard problemet (hvis løsning er angivet i de efterfølgende afsnit). Løsningen til standard pro-blemet transformeres derefter tilbage som løsningen til det aktuelle problem som illustrereti gur 9.1 [side 291. I eksempel 9.3 er metoden illustreret i forbindelse med servoproblemet(dvs. hvor der styres efter en referen e), men er også anvendelig i andre sammenhænge, f.eks.ved farvede forstyrrelser og frekvensvægtning. StandardløsningAktueltProblem problem
StandardløsningAktuelFigur 9.1. Løsningen til standardproblemet anvendes til løsning af det aktuelle pro-blem.

292 8.3 Prædiktion i L-strukturenSom bl.a. illustreret i eksempel 9.3 [side 291 kan en referen e, wt, inkluderes i problemstillin-gen ved at udvide systembeskrivelsen med en model for denne (evt. også en integraltilstand).Man kan eventuelt direkte introdu ere den i kriteriet. For de prædiktive metoder kan mananvende et kriterium af formenJt = E
(
NX
τ=t
“
(yτ − wτ )⊤ u⊤τ
”
»
O1 O12
O⊤12 O2
–„
yτ − wτ
uτ
«
) (9.33)mens der i de optimale strategier anvendesJt0 = E
(
NX
t=t0
“
(yt − wt)⊤u⊤t
”
»
O1 O12
O⊤12 O2
–„
yt − wt
ut
«
) (9.34)Bemærkning: 9.1 Frekvensvægtning: Størrelserne i [side 288 (9.6) og [side 288 (9.5)indgår i kriterierne med samme vægt for alle frekvenser. Man kan i visse tilfælde væreinteresseret i at give en frekvensmæssig vægtning. Hvis systemet er påvirket af en konstantforstyrrelse (eller drift) vil man ofte vælge en strategi, hvor DC-værdien af styresignaletikke indgår i kriteriet. Tilsvarende kan man (som i eksempel 9.3 [side 291) vælge at ladede lavfrekvente dele af udgangen indgå i kriteriet med højere vægt. Lad os nu betragte enfrekvensvægtet udgave af [side 288 (9.5), dvs.Jt0 = E
(
NX
t=t0
“
yf⊤t u
f⊤t
”
»
O1 O12
O⊤12 O2
–„
yft
uft
«
) (9.35)hvor:y
ft = Hy(q)yt u
ft = Hu(q)ut (9.36)Disse frekvensvægte eller ltre kan på intern form beskrives af:
xyt+1 = Φyx
yt + Γyyt x
ut+1 = Φux
ut + Γuut (9.37)
yft = ϕ
⊤y x
yt + ∆yyt u
ft = ϕ
⊤u x
ut + ∆uut (9.38)Som i andre sammenhænge består fremgangsmåden i at udvide systembeskrivelsen og om-formulere problemet til standardproblemet med den tilsvarende standardløsning. Det totalesystem kan beskrives af:
2
4
x
xy
xu
3
5
t+1
=
2
4
Φ 0 0
Γyϕ⊤ Φy 0
0 0 Φu
3
5
2
4
x
xy
xu
3
5
t
+
2
4
ΓΓy∆Γu
3
5ut +
2
4
vt
Γyet
0
3
5 (9.39)Antages, (for generalitetens skyld) at der eksisterer et direkte led fra styreindgrebet, dvs.yt = ϕ
⊤xt + ∆ut + et et ∈ Niid(0, R2) (9.40)gælder der at:
yft = ∆yϕ
⊤xt + ϕ
⊤y x
yt + ∆y∆ut + ∆yet (9.41)
=`
∆yϕ⊤ ϕ⊤
y 0 ∆y∆´
2
6
6
4
xt
xyt
xut
ut
3
7
7
5
+ ∆yet (9.42)

293På tilsvarende vis kan vi opskrive:u
ft =
`
0 0 ϕ⊤u ∆u∆
´
2
6
6
4
xt
xyt
xut
ut
3
7
7
5
(9.43)Indfører vi den udvidede tilstandsvektorxt =
2
4
xt
xyt
xut
3
5 (9.44)kan vi skrive:»
yft
uft
–
=
„
∆yϕ⊤ ϕ⊤
y 0 ∆y∆
0 0 ϕ⊤u ∆u∆
«»
xt
ut
– (9.45)Istedet for at minimere (9.35) kan vi minimere:Jt0 = E
(
NX
t=t0
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
) (9.46)hvor:»
Q1 Q12
Q⊤12 Q2
–
= (9.47)2
6
6
4
ϕ∆⊤y 0
ϕy 00 ϕu
∆⊤∆⊤y ∆⊤∆⊤
y
3
7
7
5
»
O1 O12
O⊤12 O2
– »
∆yϕ⊤ ϕ⊤
y 0 ∆y∆
0 0 ϕ⊤u ∆u∆
– (9.48)Hermed er problemet omformuleret som et standardproblem. 2Restriktioner. I praksis er en regulering altid underlagt visse begrænsninger. Under alleomstændigheder er den til rådighed værende information begrænset. Hvis systemets tilstander kendt taler vi om fuldstændig tilstandsinformation. Vi skriver i såfald at Ft = xt.Idet systemets tilstande fuldstændig bestemmer systemets fremtidige udvikling (sammenmed påvirkningerne) er et kendskab til xt i en reguleringsteknisk sammenhæng identiskmed et kendskab til tidligere tilstande xt, xt−1, · · · . Som regel kendes xt ikke og der tales omufuldstændig tilstandsinformation. I dette tilfælde foregår der en løbende registreringaf en del af systemets tilstande eller nogle størrelser, der er korreleret med samme. Vi skelnermellem om styringen kan foregå på basis af Ft = Yt eller Ft = Yt−1, hvor Yt og Yt−1 erdeneret i [side 250 (7.3).Det bemærkes, at løsningen til regulerings problemet involverer følgende 3 elementer:• Stokastik• Optimering• Dynamik

294 9.1 Stokastisk Statisk OptimeringI appendix D er det deterministiske optimeringsproblem behandlet for kvadratiske tabs-funktioner. I dette kapitel vil vi indledningsvis afkoble dynamikken og beskæftige os medminimering af kriterier, hvori der indgår stokastiske variable, dvs. behandler (StokastiskStatisk Optimering). De prædiktive styre strategier er baseret på en reformulering afproblemet som et statisk optimeringsproblem. I del I (afsnit 2 [side 95) beskæftigede vi osmed deterministisk dynamisk optimering. I afsnit 9.4 [side 305 vil vi tage udgangspunkt ien intern beskrivelse (en state spa e - eller en tilstandsbeskrivelse) af et stokastisk systemog anvende de fundne resultater til at konstruere metoder til optimal styring af stokastiskesystemer (Dynamisk Optimering). Metoderne anvendes på styring af lineære systemer,når kriteriet er kvadratisk (dvs. LQ-regulering). Hvis alle systemets tilstande ikke kendespræ ist må disse estimeres. Er forstyrrelserne gaussiske pro esser betegner vi den resulte-rende regulering for LQG-regulering.9.1 Stokastisk Statisk OptimeringStokastisk reguleringsteori omhandler metoder til optimal styring af dynamiske systemer,der påvirkes af stokastiske forstyrrelser. Optimeringsproblemet har således to sider, nem-lig et stokastisk aspekt samt et dynamisk aspekt. For at lette forståelsen af udledningenaf stokastiske regulatorer, vil vi i dette afsnit udelukkende beskæftige os med stokastiskoptimering.Et af hovedresultaterne i dette kapitel er stokastisk reguleringsteoris fundamentale sætning.Denne sætning illustrerer desuden forskellen mellem fuldstændig og ufuldstændig tilstandsin-formation og understreger dermed vigtigheden i at spe i ere den tilgængelige informations-mængde. Denne sætning viser desuden, at problemet omkring ufuldstændig tilstandsinfor-mation kan separeres i to, nemlig i et simpelt optimeringsproblem og et estimationsproblem.I forbindelse med deterministisk optimering betragter vi kriterier (tabsfunktioner) af typenI(x, u). hvor x er en tilstands vektor, der karakteriserer systemets tilstand, og hvor u eren vektor af beslutningsvariable eller styresignaler. Når vi beskæftiger os med stokastiskesystemer, hvilket bl. a. medfører at x ∈ X er en stokastisk vektor, er ovenstående kriteriumen stokastisk variabel og vi har ikke let ved at afgøre om I(x, u1) er mindre end I(x, u2). Vikunne f. eks. vælge at sige at dette er tilfældet hvis I(x, u1) < I(x, u2) med sandsynlighed 1.I denne fremstilling vil vi anlægge en gennemsnitsbetragtning og rangordne tabsfunktionerefter deres forventningsværdier.I det statiske stokastiske optimerings problem er opgaven at bestemme beslutnings vektoren,u ∈ U, således at det forventede tab, d.v.s. kriteriefunktionen:
J = EI(x, u) ∈ R : X ⋆ U 7→ R (9.49)er minimal under hensyntagen til de aktuelle restriktioner på u. En restriktion på u kan f. eks.være at tilstandene kun delvis kendes og at u dermed er en funktion af denne ufuldstændigeinformationsmængde.Det første tilfælde vi vil beskæftige os med, er fuldstændig tilstandsinformation. Når vikender tilstandene fuldstændigt, kan vi bestemme u som en funktion af disse, d.v.s.:u(x) : X 7→ U (9.50)

295I(x, u)
u
x
Figur 9.2. Beslutningspro esI dette tilfælde har vi følgende sætning:Sætning: 9.2 (Fuldstændig tilstandsinformation): Antag at I(x, u) har et entydigtminimum med hensyn til u for alle værdier af x. Lad endvidere u⋆ betegne den strategi forhvilken minimum opnås. Da gælder at:minu(x)
EI(x, u) ≡ EI(x, u⋆) = Eminu(x)
I(x, u) (9.51)2Bevis: For alle tilladte værdier af u(x) har vi at:
I(x, u) ≥ I(x, u⋆) ≡ minu(x)
I(x, u) (9.52)og følgelig:EI(x, u) ≥ EI(x, u⋆) ≡ Emin
u(x)I(x, u) (9.53)Minimerer vi nu venstre side med hensyn til alle tilladte strategier u(x) har vi at:
minu(x)
EI(x, u) ≥ EI(x, u⋆) ≡ Eminu(x)
I(x, u) (9.54)På den anden side har vi at for alle tilladte strategier u(x) gælder:EI(x, u(x)) ≥ min
u(x)EI(x, u) (9.55)og da spe ielt u⋆(x) er en tilladt strategi er:
EI(x, u⋆(x)) ≥ minu(x)
EI(x, u) (9.56)Sammenholdes (9.54) med (9.61) opnås (9.51). 2Bemærk at sætningen blot udsiger at forventningsværdidannelse og minimering kommuterer.Da vi i de senere anvendelser skal behandle optimale regulatorer designet efter kvadratiskekriterier er det her på sin plads at spe ialisere sætning 9.2 til det tilfælde at I er kvadratisk.
296 9.1 Stokastisk Statisk OptimeringSætning: 9.3 Antag at u er en vektor bestående af beslutningsvariable og at x er en vektorbestående af stokastiske variable. Den kvadratiske tabsfunktion:J = E
`
xT u⊤ ´
»
h11 h12
h⊤12 h22
–„
x
u
«ff (9.57)har med fuldstændig tilstandsinformation minimum foru⋆ = −h−1
22 h⊤12x (9.58)under forudsætning af at h22 er positiv denit. Minimum antager værdien:
J⋆ = Ex⊤Sx (9.59)hvor:
S = h11 − h12h−122 h
⊤12 (9.60)Hvis den stokastiske vektor x ∈ F(m,P ) da er:
J⋆ = m⊤Sm+ trSP (9.61)
2Bevis: Fra sætning 9.2 har vi at:J⋆ = min
u(x)EI(x, u) = Emin
u(x)I(x, u) (9.62)hvor det kvadratiske indeks, I , jvf. lemma D.2 fra appendix D har minimum som angivet isætningen med:
minu(x)
I(x, u) = x⊤Sx (9.63)Under forudsætning af at x ∈ F(m,P ) da gælder (9.61) jvf. sætning 3.6. 2Nu er det imidlertid langt fra altid at vi er i den gunstige situation at have fuld tilstandsin-formation. Med henblik på en senere sammenligning med ufuldstændig tilstands informationhar vi nedenfor angivet sætning 9.4, der basalt set kun er en reformulering af sætning 9.2,dog blot med den udvidelse at tilstandene her er opdelt i to, nemlig i vektorerne x og y.Sætning: 9.4 (Fuldstændig tilstandsinformation): Antag at I(x, y, u) har et entydigtminimum med hensyn til u for alle værdier af x og y. Lad endvidere u⋆(x, y) betegne den strategifor hvilken minimum opnås. Da gælder at:
minu(x,y)
EI(x, y, u) ≡ EI(x, y, u⋆) = Eminu(x)
I(x, y, u) (9.64)2

297Bevis: Beviset er identisk med beviset for sætning 9.2 blot er x erstattet af (x, y), derligesom i sætning 9.2 antages kendt. 2Man kan anlægge en alternativ fortolkning af sætning 9.4. Man kan opfatte sætning 9.4 sombehandlende et problem, hvori der i tabsfunktionen er introdu eret en (eventuel) afhængig-hed af målevektoren y (dvs. en vektor der er relateret til x men ikke nødvendigvis er identiskmed x).Lad os nu betragte optimeringsproblemet, når vi ikke har adgang til hele tilstandsvektoren,men kun til en del af den. Lad os kalde denne del for y. På grund af korrelationen mellem xog y vil et kendskab til y også give et (begrænset) kendskab til x. Dette tilfælde kaldes foroptimering under ufuldstændig tilstandsinformation.Sætning: 9.5 (ufuldstændig tilstandsinformation): Antag at funktionen:f(y, u) ≡ EI(x, y, u)|y (9.65)har et entydigt minimum med hensyn til u for alle værdier af y og lad u⋆(y) betegne den værdifor hvilken dette minimum indtræder. Da gælder at:
minu(y)
EI(x, y, u) ≡ EI(x, y, u⋆(y)) = Eyminu(y)
E[I(x, y, u)|y] (9.66)2Bevis: For alle tilladte strategier gælder at:
f(y, u) ≥ f(y, u⋆) ≡ minu(y)
f(y, u) (9.67)og følgelig også at:Eyf(y, u) ≥ Eyf(y, u⋆) (9.68)For venstresiden har vi at:
Eyf(y, u) = EyEI(x, y, u)|y = EI(x, y, u) (9.69)og for højresiden af (9.68) har vi tilsvarende dels at:Eyf(y, u⋆) = Eymin
u(y)f(y, u) = Eymin
u(y)EI(x, y, u)|y (9.70)og dels at:
Eyf(y, u⋆) = EyEI(x, y, u⋆(y))|y = EI(x, y, u⋆(y)) (9.71)Idet u∗ minimerer f(y, u) resulterer (9.68) i at:EI(x, y, u) ≥ EI(x, y, u⋆(y) = Eymin
u(y)EI(x, y, u)|y (9.72)Hvis vi minimerer venstresiden fremkommer uligheden:
minu(y)
EI(x, y, u) ≥ EI(x, y, u⋆(y) = Eyminu(y)
EI(x, y, u)|y (9.73)

298 9.1 Stokastisk Statisk OptimeringPå den anden side gælder der for en vilkårlig strategi u(y) at:EI(x, y, u(y)) ≥ min
u(y)EI(x, y, u) (9.74)og spe ielt for u⋆(y) gælder der:
EI(x, y, u⋆(y)) ≥ minu(y)
EI(x, y, u) (9.75)Sammenholdes (9.73) og (9.75) fremkommer (9.66). 2Bemærkning: 9.2 Bemærk at E•|y er en funktion af y og at operationen minu(y) f(z, u)denerer en funktion Z 7→ U. Følgelig denerer operationen minuE•|y en funktion Y 7→U. 2Bemærkning: 9.3 Sætning 9.5 kan fortolkes som at minimering (med hensyn til tilladtestrategier u : Y 7→ U) og den betingede forventningsværdidannelse kommuterer (hvilket skalfortolkes rigtigt). 2Bemærkning: 9.4 Man kan opfatte fuldstændig tilstandsinformation som et spe ialtilfæl-de af ufuldstændig tilstandsinformation. Antag nemlig at y = x, hvilket svarer til fuldstændigtilstandsinformation. Derved er EI(x, y, u)|y = I(x, y, u) og sætning 9.5 giver da sætning9.3. 2Bemærkning: 9.5 Ovenstående sætninger illustrerer hvor vigtigt det er at angive de til-ladte reguleringsstrategier (eller hvilke restriktioner de er underlagt). Det kan vises at:
minu(y)
EI(x, y, u) ≥ minu(x,y)
EI(x, y, u) (9.76)hvoraf man (ikke overraskende) kan konkludere at tabet ved ufuldstændig tilstandsinformationer større end for fuldstændig tilstandsinformation. 2Vi vil anvende sætning 9.5 på et kvadratisk kriterium og resulterer med sætning 9.6.Sætning: 9.6 Antag u er en vektor bestående af beslutningsvariable og at x og y er vektorerbestående af stokastiske variable. Den kvadratiske tabsfunktion:J = E
`
x⊤ u⊤ ´
»
h11 h12
h⊤12 h22
–„
x
u
«ff (9.77)har med ufuldstændig tilstandsinformation minimum foru⋆ = −h−1
22 h⊤12x (9.78)under forsætning af at h22 er positiv denit og at
x|y ∈ F(x, P ) (9.79)

299Minimum antager værdien:J⋆ = Ey
n
x⊤Sx+ trh11P
o (9.80)hvor:S = h11 − h12h
−122 h
⊤12 (9.81)
2Bevis: Antag at (9.79) er gyldig. Da er med notationen fra sætning 9.5:f(y, u) = EI(x, y, u)|y (9.82)
= Ex⊤h11x+ 2x⊤
h12u+ u⊤h22u|y (9.83)Anvender vi nu sætning 3.14 fra den statistiske basis får vi at:
f(y, u) = x⊤h11x+ trh11P + 2x⊤
h12u+ u⊤h22u (9.84)
=`
x⊤ u⊤ ´
»
h11 h12
h⊤12 h22
–„
x
u
«
+ trh11P (9.85)= zHz + trh11P (9.86)hvor notationen:
z =
„
x
u
« (9.87)er anvendt. Anvendes nu lemma D.2 fra appendix D til minimering af f(y, u) fås at:min
uf(y, u) = x
⊤Sx+ trh11P (9.88)hvor S er givet ved (9.81). Dette minimum optræder (j.v.f. lemma D.2) for u⋆ der er givetved (9.78) og den minimale tabsværdi er j.v.f. sætning 9.5 givet ved (9.80). 2I sætningens udledning har vi ikke spe i eret hvorledes x afhænger af den observeredestokastiske vektor, y. Denne sætning kan retteligen betegnes som separationssætningen, idetden opdeler problemet i et simpelt optimeringsproblem og et estimationsproblem.Sætning: 9.7 Betragt et problem, der består i på baggrund af y at bestemme et U , derminimerer kriteriet:
J = En
(z − w)⊤Q(z − w) + U⊤QuU
o (9.89)hvor z og w er stokastisk uafhængige. Lad os anvende betegnelserne:x|y ∈ F(x, Px) w|y ∈ F(w, Pw) z|y ∈ F(z, Pz) (9.90)Antag, at der gælder følgende sammenhæng
z = Ax+BU (9.91)

300 9.2 PC-reguleringDa er den optimale strategi (dvs. der minimerer (9.89)) givet ved:U =
h
B⊤QB +Qu
i−1
B⊤Q [w − Ax] (9.92)
2Bevis: Ifølge sætning 9.4 [side 296 har vi at:min
UE J = E
n
minU
[E J |y]o (9.93)Videre er:
E J |y = (z − w)⊤Q(z − w) + U⊤QuU + trQPz + trQPw (9.94)Optimum til E J |y er identisk med optimum for J , hvor:
J = (z − w)⊤Q(z − w) + U⊤QuU
= (Ax+BU − w)⊤Q(Ax+BU − w) + U⊤QuU
=“
Ax− w U”⊤h Q QB
B⊤Q B⊤QB +Qu
i“
Ax− w
U
”Sætningen følger hermed af lemma D.2. 2Bemærkning: 9.6 Hvis ligningsystemet:h
B⊤QB +Qu
i
U = B⊤Q [w − Ax] (9.95)ikke er entydigt (matri en [...] ikke er inverterbar) eksister der uendeligt mange løsninger til(9.95). Denne frihedsgrad kan anvendes på forskellig vis. Bestemmes U efter
U =h
B⊤QB +Qu
i+
B⊤Q [w − Ax] (9.96)vil U⊤U være minimal. Her angiver H+ den Moore-Penrose pseudoinverse af matri en H. (IMatlab: pinv(H)). Det er desuden muligt (i Matlab med \) at bestemme den løsning med detfærreste antal elementer, der er forskellig fra nul. En tredie udnyttelse af denne frihedsgrader at indføre ekstra restriktioner på U . En restriktion af typen:
ˆ
0 ... 0 1 −1˜
U = 0 (9.97)vil sikre (forudsat rangen af [B⊤QB + Qu] ikke er fuld) at de to sidste elementer i U eridentiske. 29.2 PC-reguleringPC-regulering (PC, Predi tive Control) er en betegnelse der efterhånden har vundet indpassom kendetegnende en type regulering, hvor styringen er baseret på en direkte evaluering

301af prædiktionen. Betegnelsen kan måske siges at være lidt misvisende idet de este sto-kastiske regulatorer (baseret på en LTI-beskrivelse og et kvadratisk kriterium) involvererprædiktionen.Udgangspunktet er en systembeskrivelse, der efter eventuelle udvidelser er på formen [side287 (9.3). Det antages (i udledningerne) at styreindgrebet kan bestemmes ud fra et kendskabtil systemets tilstand (fuldstændig tilstandsinformation). Resultaterne kan ret enkelt (jvfsætning 9.6 [side 299) udvides til at gælde for ufuldstændig tilstandsinformation, dvs. værebaseret på informationen i Yt eller Yt−1.Lad os først betragte kriteriet [side 299 (9.89), dvs.J = E
n
x⊤t+1Q1xt+1
o (9.98)Sætning: 9.8 Betragt et system givet ved [side 287 (9.3). Styrestrategien, der på basis afkendskabet til xt minimerer (9.98) er givet ved:ut = −
h
Γ⊤Q1Γ
i−1
Γ⊤Q1Φxt (9.99)under forudsætning af at inversionen eksisterer. 2Bevis: Idet:
E xt+1|xt = Φxt + Γut (9.100)følger sætningen direkte af sætning 9.7 [side 300. 2Bemærkning: 9.7 Tilbagekoblingen sker fra xt. Hvis bestemmelsen af ut sker på basis afYt (eller Yt−1) vil tilbagekoblingen ske fra xt|t (eller xt|t−1). 2Bemærkning: 9.8 Det fremgår af (9.99), at den resulterende regulering er invariant over-for en skalar multiplikation af Q1. 2Bemærkning: 9.9 Som tidligere nævnt (i forbindelse med [side 289 (9.14)) kan en sty-ring af systemudgangen, dvs. en minimering af:
J = En
y⊤t+1O1yt+1
o (9.101)let omformes til en tilstandsstyring som ovenstående ved at vælge Q1 = ϕOϕ⊤. Hvis systemeter skalart (dvs. en indgang og en udgang) redu erer (9.99) tilut = − 1
ϕ⊤Γϕ
⊤Φxt (9.102)stadig under forudsætning af at inversionen eksisterer, dvs. at ϕ⊤Γ 6= 0. Hvis tidsforsinkelsengennem systemet er større end 1 vil der gælde at h1 = ϕ⊤Γ = 0. 2

302 9.2 PC-reguleringDen i sætning 9.8 nævnte styrestrategi vi mange tilfælde kræve en meget stor styreeekt.Der eksisterer adskillige metoder til at redu ere styreeekten. En af dem består i at redu erekravet ved at øge horisonten. En anden metode består i at indføre en vægt på styreindgrebeti kriteriet. Et sådant kriterium kunne væreJ = E
(
x⊤τ Q1xτ +
τ−1X
i=t
u⊤i Q2ui
) (9.103)Hvis der indføres matri en:Qu =
2
6
6
6
4
Q2 0 ... 00 Q2 ... 0... ... . . . ...0 0 ... Q2
3
7
7
7
5
(9.104)ogU τ−1 = (uτ−1, ..., ut)
⊤ (9.105)kan (9.103) skrives som:J = E
n
x⊤τ Q1xτ + U
⊤τ−1QuU τ−1
o (9.106)Det bemærkes, at (9.106) er mere generel end (9.103), idet (9.106) indeholder mulighedfor at vægte interaktion mellem styreindgreb (Qu kan indeholde elementer forskellig fra nuludenfor blokdiagonalen). Ifølge sætning 7.15 [side 274 gælder at:xτ |t = Φτ−t
xt|t + Wc(τ − t)Uτ−1 (9.107)hvorWc(τ ) =
`
Γ,ΦΓ, ...,Φτ−1Γ´ (9.108)Det bemærkes, at der i minimeringsproblemet (for τ > t+1) ud over ut, der skal eektueres,indgår en hel sekvens af (prædiktive) styreindgreb. Minimeringsproblemet er for Qu = 0 ikkeentydigt (der eksisterer for τ > t + 1 uendeligt mange løsninger). Der er derfor muligt atpålægge løsningen visse begrænsninger. Vi kan f.eks. være interesseret i at nde den løsning,der kræver mindst styreeekt, dvs. hvor U⊤U er minimal.Sætning: 9.9 Betragt et system givet ved [side 287 (9.3). Styrestrategien, der på basis afkendskabet til xt minimerer (9.106) er givet ved:
U t:τ−1 = −h
W⊤c Q1Wc +Qu
i−1
W⊤c Q1Φ
τ−txt (9.109)hvor Wc = Wc(τ − t). 2Bevis: En simpel følge af (9.107) og sætning 9.7 [side 300. 2Bemærkning: 9.10 Hvis ligningssystemet
h
W⊤c Q1Wc +Qu
i
Ut:τ−1 = −W⊤c Q1Φ
τ−txt (9.110)

303ikke er entydigt (matri en [...] ikke er inverterbar) kan der anvendes en Moore-Penrosepseudoinvers, der minimerer U⊤U , eller der kan indføres yderligere restriktioner på U τ−1således at ligningssystemet er entydigt. Hvis der til et ikke entydigt ligningssystem f.eks.yderligere kræves at:[ 1 − 1 0 ... 0]U t:τ−1 = 0 (9.111)dvs. at de to sidste styreindgreb er identiske, vil rangen af ligningssystemet stige med en. 2Som tidligere nævnt kan en styring efter en referen e konstrueres ved at indbygge referen- eudviklingen i den totale model. Det er imidlertid også muligt at konstruere en referen- estyring ved ekspli it at angive referen en i kriteriet. Vi fokuserer derfor på et kriterium afformen:
J = En
(yτ − wτ )⊤O1(yτ − wτ ) + U⊤τ−1QuU τ−1
o (9.112)Som en mindre udvidelse af sætning 9.9 har vi følgende sætning.Sætning: 9.10 Betragt et system givet ved [side 287 (9.3). Styrestrategien, der på basis afkendskabet til xt og med minimal eekt minimerer (9.112) er givet ved:U τ−1 =
h
W⊤c ϕO1ϕ
⊤Wc +Qu
i−1
W⊤c ϕO1
“
wτ |t − ϕ⊤Φτ−t
xt
” (9.113)hvor Wc = Wc(τ − t). 2Bevis: Ifølge [side 302 (9.107) og [side 287 (9.3) gælder at:yτ |t = ϕ
⊤Φτ−txt|t + ϕ
⊤Wc(τ − t)Uτ−1 (9.114)hvormed sætningen følger af sætning 9.7 [side 300 29.3 GPC-reguleringGPC-regulering (GPC, General Predi tive Control) blev oprindelige foreslået i (Clarke, Mo-htadi & Tus 1987b) og (Clarke, Mohtadi & Tus 1987a) og er intensivt behandlet af man-ge forfattere. GPC-regulering er meget detaljeret gennemgået i (Soeterboek 1992) og er i(Bitmead, Gevers & Wertz 1990) sat i relation til andre typer regulatorer.I dette afsnit vil vi behandle GPC regulering af systemer beskrevet med den interne standard-form [side 287 (9.3) (der f.eks. kan være fremkommet ved at indbygge diverse påvirkninger).GPC-Styringen er konstrueret med henblik på en minimering af:Jt = E
(
NX
τ=t
(yτ −wτ )⊤O(yτ −wτ ) + u⊤τ Q2uτ
) (9.115)Bemærk, at vægtmatri erne O og Q2 meget vel kan være tidsafhængige (eller afhængige aflængden af prædiktionshorisonten). Dette kriterium kan med indførelse af:Qy = diag(O,O, ..., O) Qu = diag(Q2, Q2, ..., Q2) (9.116)

304 9.3 GPC-reguleringomformes til kriteriet:Jt = E
n
(Yt:N −Wt:N)⊤Qy(Yt:N −Wt:N) + U⊤t:NQuUt:N
o (9.117)der er mere generelt (idet Qy og Qu kan indeholde led udenfor blokdiagonalen).Ifølge [side 237 (6.81) kan vi ud fra standardformen opskrive relationen:Yt:N = Wo(N − t)xt + ΠN−tUt:N + ΠN−tVt:N−1 + ǫt:N (9.118)hvor:
Wo(τ ) =
8
>
>
>
<
>
>
>
:
ϕ⊤
ϕ⊤Φ...ϕ⊤Φτ−1
9
>
>
>
=
>
>
>
;
(9.119)og:Πτ =
8
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
:
h0 0 0 0 ... 0h1 h0 0 0 ... 0h2 h1 h0 0 ... 0h3 h2 h1 h0 ... 0... ... ... ... . . . ...hτ hτ−1 hτ−2 hτ−3 ... h0
9
>
>
>
>
>
>
>
=
>
>
>
>
>
>
>
;
hτ =
8
<
:
ϕ⊤Φτ−1Γ for τ > 0∆ for τ = 00 for τ < 0(9.120)Størrelserne Π, V og ǫ er deneret [side 237 (6.84)-(6.85). Vi har med anvendelse af sætning9.7 [side 300 følgende sætning.Sætning: 9.11 Antag, at et dynamisk system er givet ved [side 287 (9.3). Styrestrategien,der på basis af xt minimerer (9.117) er givet ved:
Ut:N =h
Π⊤QyΠ +Qu
i−1
Π⊤Qy(W −Woxt) (9.121)hvor Π = ΠN−t og Wo = Wo(N − t). Vektoren, W er minimalvarians prædiktionen af referen- evektoren Wt:N . 2Bevis: Ifølge [side 275 (7.204) har vi at:
YN|t = Wo(N − t)xt + ΠN−tUt:N (9.122)hvormed sætningen følger af sætning 9.7 [side 300. 2Bemærkning: 9.11 Tilbagekoblingen sker fra xt. Hvis bestemmelsen af ut sker på basisaf Yt (eller Yt−1) vil tilbagekoblingen ske fra xt|t (eller xt|t−1). 2Bemærkning: 9.12 Hvis inversionen ikke eksisterer, kan frihedsgraden, som angivet ibemærkning 9.10, anvendes til at opnå forskellige mål.
305• minimering af U⊤U (Moore-Penrose inversion, pinv)• mindste antal elementer i U , der er forskellige fra nul (\)• indføre restriktioner af formen:
RU = b (9.123)hvor R og b er en matrix henholdsvis en vektor2Bemærkning: 9.13 Den oprindelige version blev formuleret i forbindelse med en spe iel(ekstern) modelstruktur og med henblik på at minimere et kriterium af formen:
J = E
(
N2X
i=N1
(yt+i − wt+i)⊤Q(yt+i − wt+i) +
NuX
i=0
u⊤t+iQuut+i
) (9.124)hvor N1, N2 og Nu er tuningparametre. Dette kriterium er indeholdt i [side 304 (9.117),idet vægtene i kriteriet kan være tidsvarierende (og dermed spe ielt til visse tidspunkter værenul). 29.4 Stokastisk Dynamisk OptimeringI dette afsnit vil vi beskæftige os med optimal regulering af et dynamisk system, der erpåvirket af stokastiske forstyrrelser. Vi vil indledningsvis behandle det generelle ulineære)problem. Derefter vil vi spe ialisere fremstillingen til at omfatte regulering af lineære sy-stemer påvirket af gaussiske forstyrrelser. Herunder vil vi først udvikle en regulator, der erbaseret på et simpelt kvadratisk kriterium. Konstruktionen af denne regulator vil afsløre deprin ipielle problemer i forbindelse med LQG - regulering.9.4.1 Bellmans ligningI forbindelse med undersøgelsen af deterministisk optimal regulering udnyttede vi den ad-ditive struktur i tabsfunktionen til at angive en rekursion for det optimale tab. Dennerekursion, d.v.s. Bellmans ligning blev senere anvendt til at bestemme den optimale deter-ministiske LQ - regulator. I dette kapitel vil vi følge den samme fremgangsmåde og førstebehandle problemet generelt. Dette resulterer i Bellmans ligning for det stokastiske tilfælde.Umiddelbart herefter vil vi spe ialisere til behandling af line ære systemer og kvadratiskekriteriefunktioner. Årsagen til at vi indledningsvis behandler problemet generelt er delvistat i det generelle tilfælde får man en enklere og mere overskuelig notation.Reguleringsproblemet spe i eres ved at angive systemdynamik, påvirkninger, kriteriumsamt restriktioner.Vi antager i dette afsnit at systemet kan beskrives ved følgende pro esligning:xt+1 = f(xt, ut, vt, t) (9.125)

306 9.4 Stokastisk Dynamisk Optimeringhvor vt er hvid støj, der er ukorrelerede med xs for s ≤ t. Generelt kan den klasse af kriterier,som vi vil beskæftige os med, udtrykkes på formen:Jt0 = EJt0 Jt0 =
NX
t=t0
It (9.126)hvor It = I(xt, ut, t) er et til tidspunktet t relateret tab. Det essentielle er, at kriteriet beståradditivt af bidrag, der hver især er relateret til et tidspunkt. Vores generelle minimering pro-blem, der består i at bestemme en sekvens uiNt af styresignaler (eller beslutningsvariable),kan derfor anskueliggøres ved nedenstående gur 9.3.
ut+2ut ut+1
xt xt+1 xt+2 xt+3
I[t + 1]I[t] I[t + 2] I[t + 3]
ut+3
Figur 9.3. BeslutningssekvensenDe restriktioner vi her vil behandle er på formen:ut = funkFt (9.127)hvor Ft = xt, Yt eller Yt−1. Det generelle problem kan formelt løses og resulterer i enrekursion for det forventede (optimale) tab.Sætning: 9.12 Antag at systemtilstandene udvikles efter (9.125) og at kriteriet er additivt,dvs. på formen (9.126). Den optimale værdi for kriteriet er:
J⋆t = min
uiNt
EJt = EFtV (Ft) V (Ft) ≡ minuiN
t
EJt|Ft (9.128)hvor V (Ft) er givet ved (Bellmans ligning) rekursionen:V (Ft) = min
ut
E I(xt, ut, t) + V (Ft+1)|Ft (9.129)med randværdibetingelsen:V (FN ) = min
uN
E I(xN , uN , N)|FN (9.130)2

9.4.1 Bellmans ligning 307Bevis: Vi opskriver først det optimale kriterium og anvender sætning 9.5 fra den stokastiskestatiske optimering:J
⋆t = min
uiNt
EJt = EFt
(
minuiN
t
EJt|Ft)
= EFtV (Ft) (9.131)I sidste lighed har vi anvendt denitionen på V (Ft), dvs.V (Ft) ≡ min
uiNt
EJt|Ft (9.132)= min
ut,uiNt
[EI(xt, ut, t)|Ft + EJt+1|Ft] (9.133)Idet ut+1 og dermed uiNt+1 ikke påvirker I(xt, ut, t) har vi at:
V (Ft) = minut
"
EI(xt, ut, t)|Ft + minuiN
t+1
EJt+1|Ft
#
= minut
[EI(xt, ut, t)|Ft (9.134)+ E
(
minuiN
t+1
EJt+1|Ft+1|Ft
)#hvor vi i sidste lighed har anvendt sætning 9.5 fra den stokastiske statiske optimering. Herigenkender vi V (Ft+1) og dermed er sætningen bevist, idet:V (Ft) = min
ut
[EI(xt, ut, t)|Ft + EV (Ft+1)|Ft] (9.135)= min
ut
[I(xt, ut, t) + V (Ft+1)|Ft] (9.136)2I denne forbindelse skal det erindres at ut+1 ganske vist ikke påvirker I(xt, ut, t), men at ut ihøj grad påvirker V (Ft+1) igennem pro esligningen. Sammenlignet med den deterministiskeBellmanligning optræder der her (naturligvis) den betingede forventningsværdidannelse.Bemærk, at vi (med en forkortet notation) kan opskrive Bellmanligningen på rekursiv form:
V (Ft) = minut
EIt + minut+1
EIt+1 + ...minuN
EIN |FN...|Ft+1|Ft (9.137)Man kan nu forledes til at tro at det er muligt først at bestemme det optimale uN ogderefter arbejde sig tilbage til ut. Imidlertid afhænger (som før nævnt) f. eks. Jt+1 af ut.Vi har følgelig en modstridende optimering, der er tilbageskridende, og en fremadskridendetilstandsudvikling. For tilfældet med lineære systemer og kvadratiske kriterier kan dennemodstrid løses.

308 9.5 Fuldstændig Tilstandsinformation9.5 Fuldstændig TilstandsinformationI dette afsnit vil vi spe ialisere os til regulering af lineære systemer efter kvadratiske kriterier(LQ-regulering). Vi antager, at vi kender systemtilstandene fuldt ud og kan anvende demi en tilbagekobling. Vi antager altså at Ft = xt Dette betyder bl. a. at xt|Ft ∈ F(xt, 0). Viantager, at systemet er lineært og kan beskrives med pro esligningen:xt+1 = Φxt + Γut + vt xt0 ∈ F(m0,Σ0) (9.138)hvor vt er en sekvens af uafhængige F(0, R1)-fordelte stokastiske variable, der er uafhæn-gige af xs for s ≤ t. I de este anvendelser er systemet tidsinvariant, hvilket blandt andetvil sige at matri erne, Φ og Γ er konstante. Der er imidlertid ikke noget, der i denne udled-ning hindrer, at systemet kan være tidsvarierende. Vi har blot i denne fremstilling undladttidsargumentet for Φ og Γ.
Φ
ut
Γ
vt
xt
Figur 9.4. Stokastisk system med indbygget model for forstyrrelser, referen esignalog hjælpetilstande.Vi vil bestemme en regulator, der på optimal vis styrer det lineære dynamiske system såledesat det kvadratiske kriterium:Jt0 = E
(
NX
t=t0
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
) (9.139)er minimal. Bemærk, at også vægtmatri erne Q1, Q12 og Q2 meget vel kan være tidsvarie-rende. Ved anvendelse af Bellmans ligning (sætning 9.12) har vi følgende sætning.Sætning: 9.13 Den optimale løsning til det basale LQ-problem (dvs. når systemet er givetved (9.138) og kriteriet ved (9.139)) under fuldstændig tilstandsinformation er givet ved:ut = −L⊤
t xt (9.140)hvor forstærkningen er:Lt =
h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 (9.141)og hvor St er en positiv semidenit matrix og er givet ved rekursionen:St = (Φ − ΓL⊤
t )⊤St+1Φ +Q1 − LtQ⊤12 (9.142)

309med initialbetingelsen:SN+1 = 0 (9.143)Med denne styrestrategi vil det minimale tab være givet ved:
Jt0 = m⊤0 St0m0 + trΣ0St0 +
NX
i=t0
trR1Si+1 (9.144)2Bevis: Vi starter med at bestemme det optimale styresignal for t = N og arbejder ostilbage. Ved anvendelse af resultaterne fra statisk optimering har vi direkte at kriteriet:
V (xN) = minuN
E
ˆ
x⊤N u⊤
N
˜
„
Q1 Q12
Q⊤12 Q2
«»
xN
uN
–
|xN
ff (9.145)= x
⊤N
“
Q1 −Q12Q−12 Q
⊤12
”
xN (9.146)for:uN = −Q−1
2 Q⊤12xN (9.147)Dette er i umiddelbar overensstemmelse med sætningen, når SN+1 = 0. Antag nu at vi harfundet det optimale styresignal for t+1, t+2, ... ,N og skal bestemme det optimale ut. IfølgeBellmans ligning har vi til bestemmelse af ut følgende ligning:
V (xt) = minut
E
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
+ V (xt+1)|xt
ff (9.148)Inspireret af løsningen for tidspunktet N og spe ielt af kapitlet angående stokastisk mini-mering af kvadratiske former gætter vi på at V (xt+1) er kvadratisk i xt+1, altså at:V (xt+1) = x
⊤t+1St+1xt+1 + βt+1 (9.149)hvor St+1 er en positiv denit matrix og βt+1 er en skalar, der er uafhængig af xt+1. Vi skalnu anvende induktions aksiomet og skal vise at V (xt) har samme struktur som V (xt+1).Indføres betegnelsen:
zt =
»
xt
ut
– (9.150)gælder med de nævnte antagelser at:V (xt) = min
ut
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + x⊤t+1St+1xt+1 + βt+1|xt
ff (9.151)der med indsættelse af pro esligningen giver at:V (xt) = min
ut
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + (Φxt + Γut + vt)⊤St+1
×(Φxt + Γut + vt) + βt+1|xt= min
ut
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + z⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
zt|xt
ff
+Ev⊤t St+1vt|xt + βt+1 (9.152)

310 9.5 Fuldstændig TilstandsinformationSidste lighedstegn fremkommer dels ved at anvende at vt er uafhængig af Φxt + Γut og delsved at anvende lemma D.1 [side 505 fra appendix D. Det derved fremkomne minimerings-problem har vi behandlet i forbindelse med stokastisk statisk minimering. Når vi anvendersætning 9.3 [side 296 herfra (Stokastisk Statisk Optimering) nder vi at V (xt) antager sitminimum:V (xt) = x
⊤t Stxt + trSt+1R1 + βt+1 (9.153)der optræder for:
ut = −h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i
xt = −L⊤t xt (9.154)hvor St er givet ved rekursionen:
St = Φ⊤St+1Φ +Q1 −
h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i
= [Φ − ΓL⊤t ]⊤St+1Φ +Q1 − LtQ
⊤12Sætningens første del er herved bevist ved hjælp af induktion. Videre har vi at:
V (xt) = x⊤t Stxt + trSt+1R1 + βt+1 = x
⊤t Stxt + βt (9.155)hvor βt er givet ved rekursionen:
βt = βt+1 + trSt+1R1 (9.156)Ved at betragte V (xN) ser vi at βN = 0 hvilket er opfyldt, hvis βN+1 = 0 (SN+1 = 0 j.v.f.ovenstående). Vi kan nu give et samlet udtryk for βt0 .βt0 =
NX
i=t0
trR1Si+1 (9.157)IdetV (t0) = x
⊤t0St0xt0 + βt0 (9.158)kan vi anvende sætning 3.6 fra den statistiske basis og bestemme at minimum for kriterieter:
Jt0 = EV (xt0) (9.159)= m
⊤0 St0m0 + trΣ0St0 +
NX
i=t0
trR1si+1 (9.160)2Blokdiagrammet for et lineært stokastisk system med LQ-regulator er vist i 9.5.Bemærkning: 9.14 Bemærk, at regulatoren er lineær og at rekursionerne for St og Lt for-melt er de samme som for det deterministiske tilfælde. Bemærk, at i det stokastiske tilfældevil tilstandsvektoren normalt indeholde størrelser, der er relateret til de stokastiske forstyr-relser. Derimod er desuden en stor forskel på tabene. Forskellen optræder (og er spe ielt

311−LT
t
ut
Γ
vt
xt
Φ
Figur 9.5. Blokdiagrammet for et lineært stokastisk system med LQ-regulator.tydelige i praksis) ved at modellen for de stokastiske forstyrrelser indgår i systembeskrivelsenpå linie med modellen af den deterministiske del af systemet.De tre led i det optimale tab kan hver især fortolkesLeddet m⊤0 St0m0 skyldes, at tilstandene i startøjeblikket har en deterministisk afvigelse fraorigo.Leddet trΣ0St0 skyldes, at tilstandene i startøjeblikket har en stokastisk afvigelse fra origo.Leddet PN
t=t0trR1Si+1 skyldes den stokastiske påvirkning af systemet, dvs. fra pro esstøj-en.Bemærk, at de to første led skyldes initialbetingelsen mens det tredie som sagt skyldes pro- esstøjen. 2Bemærkning: 9.15 Bemærk, at rekursionerne for St og Pt i det prædiktive kalmanlter(for R12 = 0) har præ is den samme struktur. Denne type ligning kaldes for Ri atiligning.Rekursionen for Pt er fremadrettet hvorimod rekursionen for St er bagudrettet. Man kananskueliggøre analogien ved at sammenligne:Kalmanlter LQ-regulator
Pt St+1
Kt Lt
Φ Φ⊤
ϕ Γt t+1R1 Q1
R2 Q2
R12 Q12Denne analogi udmøntes også i ere måder at opskrive rekursionerne for St, der i neden-stående sætning er angivet for Q12 = 0. 2

312 9.5 Fuldstændig TilstandsinformationSætning: 9.14 Rekursionen for S(t) kan udover som angivet i sætning 9.13 [side 309 skrivessom:St = Φ⊤
St+1Φ +Q1 − Lt[Γ⊤St+1Γ +Q2]L
⊤t (9.161)
= [Φ − ΓL⊤t ]⊤St+1[Φ − ΓL⊤
t ] +Q1 + LtQ2L⊤t −Q12L
⊤t − LtQ
⊤12 (9.162)
= Φ⊤St+1Φ +Q1
−h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i (9.163)2Udvidelse: 17 Det kan vises at den optimale regulering af systemet:
x(tc) = Ax(tc) + Bu(tc) + v(tc) (9.164)efter et kvadratisk kriterium:J = E
Z t1
t0
xT (tc)Q1x(tc) + uT (tc)Q2u(tc)dt
ff (9.165)er givet ved:u(T ) = −L(tc)x(tc) (9.166)Forstærkningen er:L(tc) = S(tc)BQ−1
2 (9.167)hvor matri en S(tc) er givet ved dierentialligningen:− S = AT S + SA + Q1 − LQ2LT S(t1) = 0 (9.168)der løses baglæns. 2Eksempel: 9.4 Betragt et førsteordens system givet ved:xt+1 = 0.98xt + 1.25ut + vt vt ∈ N(0, 0.25) (9.169)Vælges der et kriterium med:
q1 = 1 q2 = 0.1 (9.170)Da vil forløbet af st, lt og a− bl være som angivet i gur gur 9.6 [side 313, når t0 = 0 og N = 5.2Udledningen i forbindelse standardproblemet er baseret på en fast horisont (se gur 9.7[side 313). Her er tuningparametrene, Q1, Q12 og Q2 samt længden af horisonten, N −
t0. Her løsningen som angivet i sætning 9.13 [side 309 en tidsvarierende forstærkning (seeksempel 9.4 [side 312). Ofte vil tilbagekoblingen forsvinde ved udløbet af horisonten oglukketsløjfepolerne vil nærme sig til reguleringsobjektets poler.Man kan som et alternativ anvende en glidende horisont, hvor t0 og N redeneres vedhver sampling (t0 = t og N = t+M). Herved bliver tilbagekoblingen (og lukketsløjfepolerne)konstant(e). Ud over Q1 og Q2 er længden M af horisonten en vigtig tuningparameter.
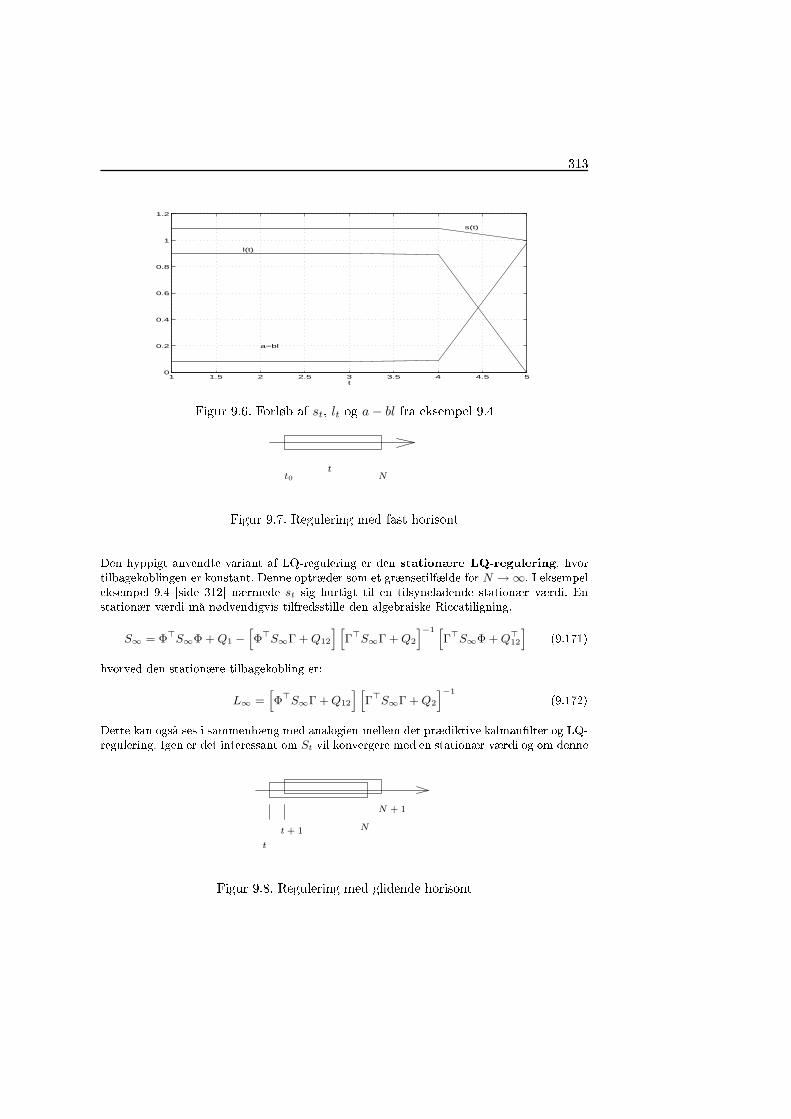
313
1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
s(t)
l(t)
a−bl
tFigur 9.6. Forløb af st, lt og a − bl fra eksempel 9.4t0 N
tFigur 9.7. Regulering med fast horisontDen hyppigt anvendte variant af LQ-regulering er den stationære LQ-regulering, hvortilbagekoblingen er konstant. Denne optræder som et grænsetilfælde for N → ∞. I eksempeleksempel 9.4 [side 312 nærmede st sig hurtigt til en tilsyneladende stationær værdi. Enstationær værdi må nødvendigvis tilfredsstille den algebraiske Ri atiligning,S∞ = Φ⊤
S∞Φ +Q1 −h
Φ⊤S∞Γ +Q12
i h
Γ⊤S∞Γ +Q2
i−1 h
Γ⊤S∞Φ +Q
⊤12
i (9.171)hvorved den stationære tilbagekobling er:L∞ =
h
Φ⊤S∞Γ +Q12
i h
Γ⊤S∞Γ +Q2
i−1 (9.172)Dette kan også ses i sammenhæng med analogien mellem det prædiktive kalmanlter og LQ-regulering. Igen er det interessant om St vil konvergere med en stationær værdi og om dennet
Nt + 1
N + 1
Figur 9.8. Regulering med glidende horisont

314 9.5 Fuldstændig Tilstandsinformationvil sikre at det tilbagekoblede system er stabilt. Vi i analogi med kalmanltrene følgende tosætninger, der er bevist i (Lewis 1986b).Sætning: 9.15 Antag, at (Φ,Γ) er stabiliserbar. For hver SN eksisterer der en begrænsetgrænseværdi S∞ for (9.163). Yderligere er S∞ en positiv semidenit løsning til (9.171). 2Sætning: 9.16 Antag at Q2 > 0, Q12 = 0 og at (Q1,Φ) er observerbart. Da er (Φ,Γ)stabiliserbar hvis og kun hvis1 Der eksisterer en entydig positiv denit løsning S∞ til Ri atiligningen (9.142), der eruafhængig af SN . Desuden er S∞ en entydig positiv denit løsning til den algebraiskeRi atiligning (9.171).2 Egenværdierne til Φ − ΓL⊤∞ er beliggende strengt indenfor enheds irklen.
2Eksempel: 9.5 Lad os betragte et førsteordens systemxt+1 = axt + but + vt (9.173)der ønskes styret således at kriteriet
J = limN→∞
1
N
NX
t=t0
E˘
q1x2t + q2u2
t
¯ (9.174)er minimalt. Den stationære værdi s skal ndes som den positive løsning til:b2s2 + [(1 − a2)q2 − b2q1]s − q1q2 = 0 (9.175)Den optimale stationære tilbagekobling er da givet ved ut = −lxt hvor:
l =abs
b2s + q2(9.176)
2Eksempel: 9.6 (q12 problemet) Lad os igen betragte systemet fra eksempel 9.5 [side 314 dernu ønskes styret, således at kriterietJ = lim
N→∞1
N
NX
t=t0
E˘
q1x2t + q2u2
t + 2q12utxt
¯ (9.177)er minimalt. Den stationære værdi s skal ndes som den positive løsning til:b2s2 + [(1 − a2)q2 − b2q1 + 2abq12]s + q12 − q1q2 = 0 (9.178)Den optimale stationære tilbagekobling er da givet ved ut = −lxt hvor:
l =abs + q12
b2s + q2(9.179)
2
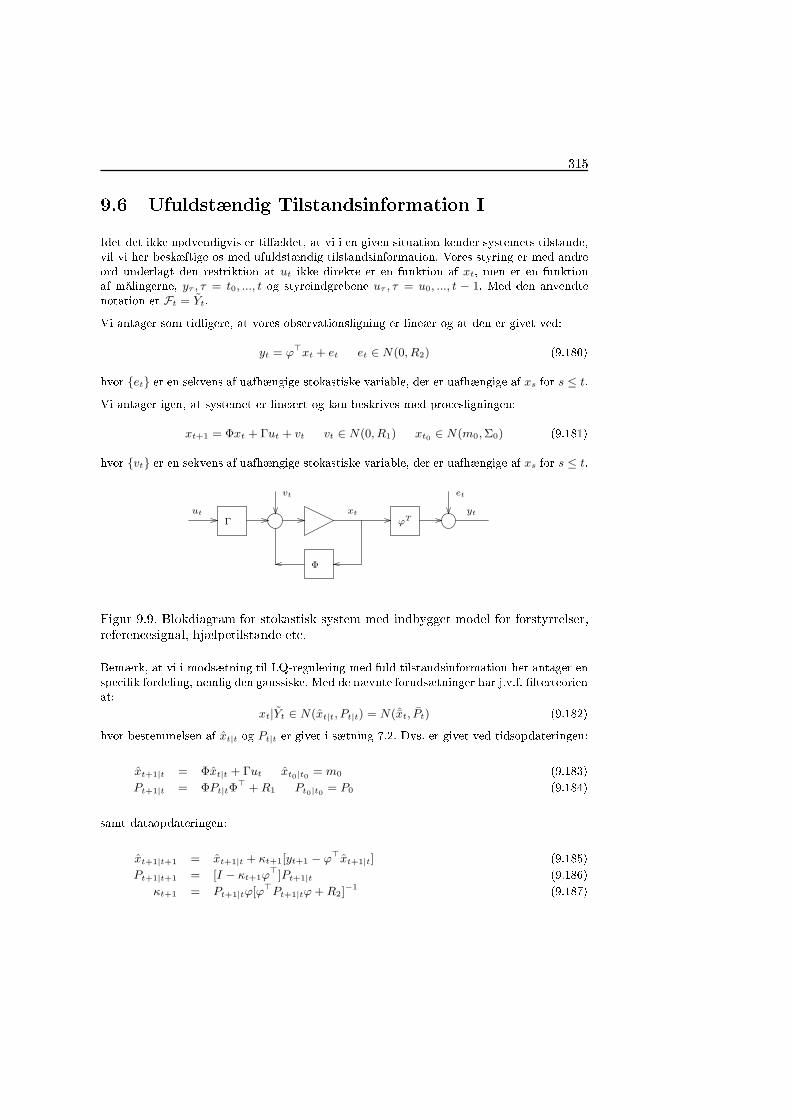
3159.6 Ufuldstændig Tilstandsinformation IIdet det ikke nødvendigvis er tilfældet, at vi i en given situation kender systemets tilstande,vil vi her beskæftige os med ufuldstændig tilstandsinformation. Vores styring er med andreord underlagt den restriktion at ut ikke direkte er en funktion af xt, men er en funktionaf målingerne, yτ , τ = t0, ..., t og styreindgrebene uτ , τ = u0, ..., t − 1. Med den anvendtenotation er Ft = Yt.Vi antager som tidligere, at vores observationsligning er lineær og at den er givet ved:yt = ϕ
⊤xt + et et ∈ N(0, R2) (9.180)hvor et er en sekvens af uafhængige stokastiske variable, der er uafhængige af xs for s ≤ t.Vi antager igen, at systemet er lineært og kan beskrives med pro esligningen:
xt+1 = Φxt + Γut + vt vt ∈ N(0, R1) xt0 ∈ N(m0,Σ0) (9.181)hvor vt er en sekvens af uafhængige stokastiske variable, der er uafhængige af xs for s ≤ t.Γ
ut
vt et
yt
ϕTxt
ΦFigur 9.9. Blokdiagram for stokastisk system med indbygget model for forstyrrelser,referen esignal, hjælpetilstande et .Bemærk, at vi i modsætning til LQ-regulering med fuld tilstandsinformation her antager enspe ik fordeling, nemlig den gaussiske. Med de nævnte forudsætninger har j.v.f. lterteorienat:xt|Yt ∈ N(xt|t, Pt|t) = N(ˆxt, Pt) (9.182)hvor bestemmelsen af xt|t og Pt|t er givet i sætning 7.2. Dvs. er givet ved tidsopdateringen:
xt+1|t = Φxt|t + Γut xt0|t0 = m0 (9.183)Pt+1|t = ΦPt|tΦ
⊤ +R1 Pt0|t0 = P0 (9.184)samt dataopdateringen:xt+1|t+1 = xt+1|t + κt+1[yt+1 − ϕ
⊤xt+1|t] (9.185)
Pt+1|t+1 = [I − κt+1ϕ⊤]Pt+1|t (9.186)
κt+1 = Pt+1|tϕ[ϕ⊤Pt+1|tϕ+R2]
−1 (9.187)

316 9.6 Ufuldstændig Tilstandsinformation IVi vil under ufuldstændig tilstandsinformation, bestemme en regulator der på optimal visregulerer det lineære dynamiske system efter et kvadratisk kriterium med formen:Jt0 = E
(
NX
t=t0
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
) (9.188)Løsningen på dette LQG-problem er angivet i nedenstående sætning 9.17.Sætning: 9.17 Den optimale løsning til det basale LQG-problem under ufuldstændig til-standsinformation (Ft = Yt = (Y ⊤t , U⊤
t−1)⊤) er givet ved:
ut = −L⊤t ˆxt = −L⊤
t xt|t (9.189)hvor forstærkningen er:Lt =
h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 (9.190)og hvor St er en positiv semidenit matrix og er givet ved rekursionen:St = (Φ − ΓL⊤
t )⊤St+1Φ +Q1 − LtQ⊤12 (9.191)med initialbetingelsen:
SN+1 = 0 (9.192)Tilbagekoblingen sker fra:xt|t = E
n
xt|Yt
o (9.193)der kan bestemmes ved hjælp af et kalmanlter fra sætning 7.2. 2Bevis: Vi starter med at bestemme det optimale styresignal for t = N og arbejder ostilbage. Ved anvendelse af resultaterne fra statisk optimering har vi direkte at kriteriet:V (YN) = min
uN
E
ˆ
x⊤N u⊤
N
˜
„
Q1 Q12
Q⊤12 Q2
«»
xN
uN
–
|YN
ff
= minuN
ˆ
ˆx⊤N u⊤
N
˜
„
Q1 Q12
Q⊤12 Q2
«»
ˆxN
uN
–
+ trPNQ1ff
= ˆx⊤N
h
Q1 −Q12Q−12 Q
⊤12
i
ˆxN + trPN|NQ1for:uN = −Q−1
2 Q⊤12 ˆxNDette er i umiddelbar overensstemmelse med sætningen, når SN+1 = 0. Antag nu at vi harfundet det optimale styresignal for t+1, t+2, ..., N og skal bestemme det optimale ut. IfølgeBellmans ligning har vi til bestemmelse af ut følgende:
V (Yt) = minut
E
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
+ V (Yt+1)|Yt
ff (9.194)

317Inspireret af løsningen for tidspunktet N og spe ielt af kapitlet angående stokastisk minime-ring af kvadratiske former gætter vi på at V (Yt+1) er kvadratisk i xt+1, altså at:V (Yt+1) = ˆx⊤
t+1St+1 ˆxt+1 + βt+1 (9.195)hvor St+1 er en positiv denit matrix og βt+1 er en skalar, der er uafhængig af xt+1. Indføres(som tidligere) zt ved:zt =
„
xt
ut
« (9.196)som i sætning 9.13 gælder med de nævnte antagelser at:V (Yt) = min
ut
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + ˆx⊤t+1St+1 ˆxt+1 + βt+1|Yt−1
ff (9.197)Vi vil nu undersøge den betingede fordeling af:ˆxt+1 = xt+1|t + κt+1[yt+1 − ϕ
⊤xt+1|t]
= Φˆxt + Γut + κt+1[ϕ⊤xt+1|t + et+1]Betinget Yt er:
ˆxt+1|Yt ∈ N(Φˆxt + Γut, κt+1[ϕ⊤Pt+1|tϕ+R2]κt+1) (9.198)og dermed har vi ifølge sætning 3.14, den statistiske basis at:
En
ˆx⊤t+1St+1 ˆxt+1|Yt
o
=
= (Φˆxt + Γut)⊤St+1(Φˆxt + Γut) + trSt+1(κt+1[ϕ
⊤Pt+1|tϕ+R2]κt+1)
= ˆz⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
ˆzt + trSt+1(κt+1[ϕ⊤Pt+1|tϕ+R2]κt+1)hvor vi igen har anvendt lemma D.1 [side 505 fra appendix D. Da nu
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt|Yt
ff
= ˆz⊤t
»
Q1 Q12
Q⊤12 Q2
–
ˆzt + trQ1Pt (9.199)giver (9.197) at:V (Yt) = min
ut
ˆz⊤t
»
Q1 Q12
Q⊤12 Q2
–
ˆzt + trQ1Pt + ˆz⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
ˆzt.
+ trSt+1(κt+1[ϕ⊤Pt+1|tϕ+R2]κt+1) + βt+1
o
= minut
E
ˆz⊤t
»
Φ⊤St+1Φ +Q1 Φ⊤St+1Γ +Q12
Γ⊤St+1Φ +Q⊤12 Γ⊤St+1Γ +Q2
–
ˆzt
+trQ1Pt + trSt+1(κt+1[ϕ⊤Pt+1|tϕ+R2]κt+1) + βt+1Det derved fremkomne minimeringsproblem har vi behandlet i appendix D, lemma D.2 [side506. Når vi anvender dette lemma nder vi at V (Yt) antager sit minimum:
V (Yt) = ˆx⊤t St ˆxt + trQ1Pt + trSt+1(κt+1[ϕ
⊤Pt+1|tϕ+R2]κt+1) + βt+1
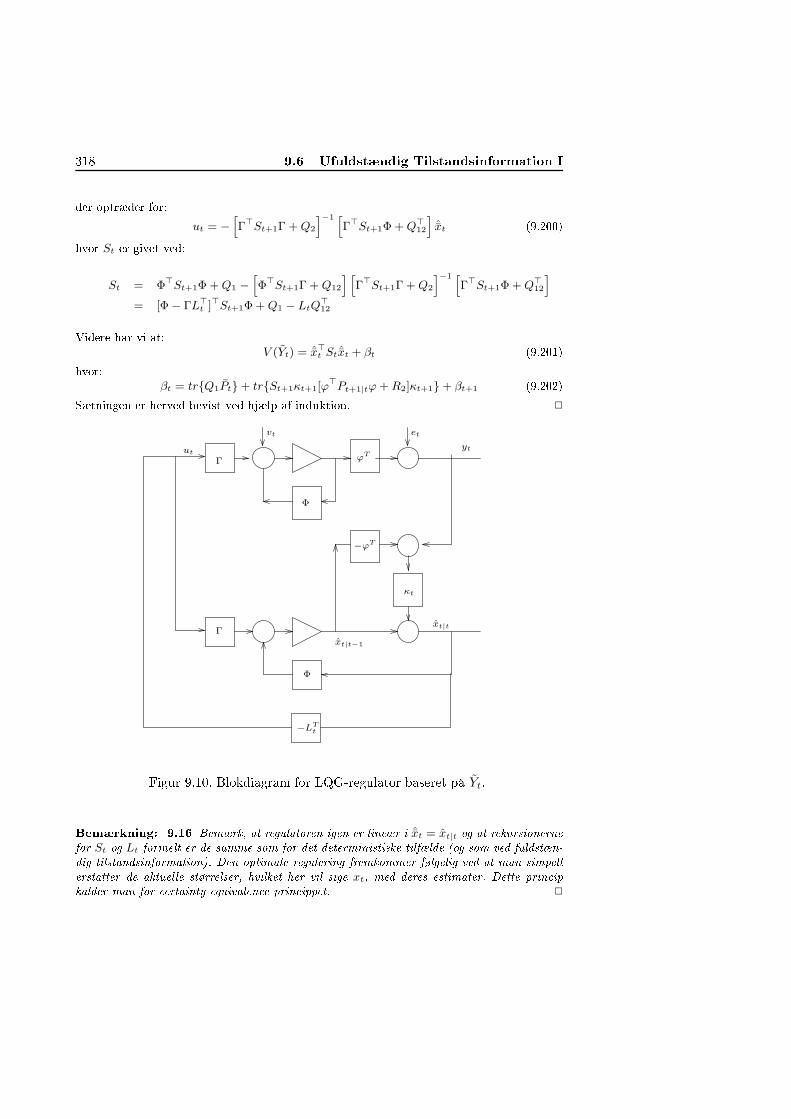
318 9.6 Ufuldstændig Tilstandsinformation Ider optræder for:ut = −
h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i
ˆxt (9.200)hvor St er givet ved:St = Φ⊤
St+1Φ +Q1 −h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i
= [Φ − ΓL⊤t ]⊤St+1Φ +Q1 − LtQ
⊤12Videre har vi at:
V (Yt) = ˆx⊤t St ˆxt + βt (9.201)hvor:
βt = trQ1Pt + trSt+1κt+1[ϕ⊤Pt+1|tϕ+R2]κt+1 + βt+1 (9.202)Sætningen er herved bevist ved hjælp af induktion. 2
−ϕT
et
ut
Γ
Γ
κt
ϕTyt
vt
xt|t−1
xt|t
Φ
Φ
−LTtFigur 9.10. Blokdiagram for LQG-regulator baseret på Yt.Bemærkning: 9.16 Bemærk, at regulatoren igen er lineær i ˆxt = xt|t og at rekursionernefor St og Lt formelt er de samme som for det deterministiske tilfælde (og som ved fuldstæn-dig tilstandsinformation). Den optimale regulering fremkommer følgelig ved at man simpelterstatter de aktuelle størrelser, hvilket her vil sige xt, med deres estimater. Dette prin ipkalder man for ertainty equivalen e prin ippet. 2

9.6.1 Lukketsløjfe egenskaber I 319Bemærkning: 9.17 Den optimale strategi, der er angivet i sætningen, opdeler problemeti to, nemlig i et estimationsproblem og i et rent reguleringsproblem. Estimatoren (kalman-lteret) afhænger kun af systemdynamikken og af støjegenskaberne. Tilsvarende er tilbage-koblingen kun afhængig af systemdynamikken og kriteriefunktionen (dvs. Q1 og Q2 samt N).Sætningen betegnes derfor også som separationssætningen. 29.6.1 Lukketsløjfe egenskaber IAntag, nu i dette afsnit at systemet er givet ved (9.181) - (9.180) og at der ikke er nogenkorrelation mellem pro es og målestøj, dvs. R12 = 0. Hvis reguleringen er baseret på Yt erstyresignalet givet ved:ut = −L⊤ ˆxt = −L⊤
xt|t (9.203)ˆxt+1 = Φˆxt + Γut + κt+1
“
yt+1 − ϕ⊤[Φˆxt + Γut]
” (9.204)Bemærk, at der anvendes et (ordinært) kalmanlter. Lukketsløjfe systemet er af ordenen2n (n fra systemet og n fra kalmanlteret). Hvis vi skifter koordinatsystem fra (xt, ˆxt) til(xt, ˜xt) får vi beskrivelsen:
xt+1 = (Φ − ΓL⊤t )xt + ΓL⊤
t ˜xt + vt (9.205)˜xt+1 = (I − κt+1ϕ
⊤)(Φ˜xt + vt) − κet+1 (9.206)Dynamikken i lukketsløjfe systemet er bestemt af (Φ − ΓL⊤t ) og (I − κt+1ϕ
⊤)Φ, d.v.s. afdynamikken for det tilsvarende deterministiske system og dynamikken af det optimale lter.Hvis matri erne, (Φ−ΓL⊤t ) og (I−κt+1ϕ
⊤)Φ er konstante er egenværdierne for lukketsløjfesystemet givet ved egenværdierne til (Φ−ΓL⊤t ) og (I−κt+1ϕ
⊤)Φ. For den stationær løsning(N → ∞ og t0 → −∞) angiver vi uden bevis.Sætning: 9.18 Hvis det dynamiske system er både styre- og observerbart og hvis R2 og Q2erpositivt denitte, da eksisterer entydige stationære løsninger for Ri atiligningerne til bestem-melse af kalmanlteret (P , κ) og den optimale tilbagekobling (S,L). 2Beskrivelsen af det tilbagekoblede system kan bringes på formen:
xt+1
˜xt+1
ff
=
»
Φ − ΓL⊤t ΓL⊤
t
0 Φ − κt+1ϕ⊤Φ
–
xt
˜xt
ff (9.207)+
„
vt
(I − κt+1ϕ⊤)vt − κt+1et+1
« (9.208)

320 9.7 Ufuldstændig Tilstandsinformation IIder kan danne basis for en analyse af de stationære forhold for systemet. Vi er interessereti at bestemme fordelingen for:zt =
xt
˜xt
ff
∈ F
„
mt
˜mt
ff
,
Σ Σ12
Σ⊤12 Σ2
ff« (9.209)For middelværdierne har vi udviklingen:mt+1 = (Φ − ΓL⊤
t )mt + ΓL⊤ ˜mt mt0 = m0 (9.210)˜mt+1 = (Φ − κtϕ
⊤Φ) ˜mt ˜mt0 = ˜m0 (9.211)Forudsæt i det følgende at egenværdierne for (Φ−ΓL⊤∞) og (I−κ∞ϕ
⊤)Φ ligger klart indenforenheds irklen. Da er:mt → 0 for t→ ∞ ˜mt → 0 for t0 → −∞ (9.212)Variansen, Pt, for estimationsfejlen, ˜xt, er givet ved Ri ati ligningen fra kalmanlteret (detf.eks. sige som i sætning 7.2). Denne (Ri ati ligningen) kan have forskellige udformninger.For det ordinære kalmanlter kan den bringes på formen:
Pt+1 = (I − κt+1ϕ⊤)(ΦPtΦ
⊤ +R1)(I − κt+1ϕ⊤)⊤ + κt+1R2κ
⊤t+1 (9.213)Idet xt er ukorreleret med xt, gælder der at kovariansen mellem xt og xt er lig Pt. Lad P∞betegne den stationære varians for estimationsfejlen. Vi har således at:
Σ2 = P∞ Σ12 = P∞ (9.214)Til bestemmelse af variansen, Σt, for xt har vi rekursionen:Σt+1 = (Φ − ΓL⊤
t )Σt(Φ − ΓL⊤t )⊤ + ΓL⊤
t PtLtΓ⊤
+(Φ − ΓL⊤t )PtLtΓ
⊤ + ΓL⊤t Pt(Φ − ΓL⊤
t )⊤ +R1 (9.215)Bemærkning: 9.18 Bemærk, at den stationære værdi for Pt kan bestemmes på sædvanligvis ved undersøgelse af de stationære egenskaber for kalmanlteret, dvs. som angivet i sætning(7.2). Derefter kan den stationære varians for xt bestemmes af (9.215). 29.7 Ufuldstændig Tilstandsinformation III det tidligere afsnit om ufuldstændig tilstandsinformation har vi betragtet styrestrategier,der er baseret på informationen Yt, dvs. bl.a. også på sidste måling. Blandt andet tradition ogdet faktum at den resulterende styrestrategi har relationer til den tidskontinuere har medførtat man i litteraturen ofte betragter en strategi, der er baseret på målinger og styreindgrebyτ , uτ , τ = t0, ..., t− 1. Dvs. på informationen i Ft = Yt−1.Det antages igen at systemet et givet ved [side 287 (9.3) og [side 287 (9.4). Med de nævnteforudsætninger har j.v.f. lterteorien at:
xt+1|Yt ∈ N(xt+1, Pt+1) (9.216)
321hvor:xt+1 = Φxt + Γut +Kt[yt − ϕ
⊤xt] xt0 = m0 (9.217)
Kt = ΦPtϕ[ϕ⊤Ptϕ+R2]
−1 (9.218)Pt+1 = [Φ −Ktϕ
⊤]PtΦ⊤ +R1 Pt0 = P0 (9.219)Bemærk, at dette er rekursionerne for det prædiktive kalmanlter. Vi vil under ufuldstæn-dig tilstandsinformation, bestemme en regulator der på optimal vis regulerer det lineæredynamiske system efter et kvadratisk kriterium med formen:
Jt0 = E
(
NX
t=t0
“
x⊤t u
⊤t
”
»
Q1 Q12
Q⊤12 Q2
–„
xt
ut
«
) (9.220)Løsningen på dette LQG-problem er angivet i nedenstående sætning 9.19, der under tiden(se f,eks, (Åström 1970)) betegnes som separationssætningen.Sætning: 9.19 Den optimale løsning til det basale LQG - problem under ufuldstændig til-stands information (Ft = Yt−1 = (Y ⊤t−1, U
⊤t−1)
⊤) er givet ved:ut = −L⊤
t xt = −L⊤t xt|t−1 (9.221)hvor forstærkningen er:
Lt =h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 (9.222)og hvor St er en positiv semidenit matrix og er givet ved rekursionen:St = (Φ − ΓL⊤
t )⊤St+1Φ +Q1 − LtQ⊤12 (9.223)med initialbetingelsen:
SN+1 = 0 (9.224)Tilbagekoblingen sker fra:xt = xt|t−1 = E
˘
xt|Yt−1
¯ (9.225)der kan bestemmes ved hjælp af det prædiktive kalmanlter fra sætning 7.7 eller 7.6. Med dennestyrestrategi vil det minimale tab være givet ved:Jt0 = m
⊤0 St0m0 + trΣ0St0 +
NX
i=t0
trR1Si+1 +
NX
t=t0
trPtLtSt+1Φ (9.226)2Bevis: Teknikken i dette bevis er den samme som beviset for sætning 9.17 [side 316 Vistarter med at bestemme det optimale styresignal for t = N og arbejder os tilbage. Vedanvendelse af resultaterne fra statisk optimering har vi direkte at kriteriet:
V (YN−1) = minuN
E
ˆ
x⊤N u⊤
N
˜
„
Q1 Q12
Q⊤12 Q2
«»
xN
uN
–
|YN−1
ff
= minuN
ˆ
x⊤N u⊤
N
˜
„
Q1 Q12
Q⊤12 Q2
«»
xN
uN
–
+ trPNQ1ff
= x⊤N
h
Q1 −Q12Q−12 Q
⊤12
i
xN + trPNQ1

322 9.7 Ufuldstændig Tilstandsinformation IIfor:uN = −Q−1
2 Q⊤12xNDette er i umiddelbar overensstemmelse med sætningen, når SN+1 = 0. Antag nu at vi harfundet det optimale styresignal for t+1, t+2, ... ,N og skal bestemme det optimale ut. IfølgeBellmans ligning har vi til bestemmelse af ut følgende:
V (Yt−1) = minut
En
x⊤t Q1xt + u
⊤t Q2ut + V (Yt)|Yt−1
o (9.227)Inspireret af løsningen for tidspunktet N og spe ielt af kapitlet angående stokastisk mini-mering af kvadratiske former gætter vi på at V (Yt) er kvadratisk i xt+1, altså at:V (Yt) = x
⊤t+1St+1xt+1 + βt+1 (9.228)hvor St+1 er en positiv denit matrix og βt+1 er en skalar, der er uafhængig af xt+1. Indføres
zt ved:zt =
»
xt
ut
– (9.229)som i sætning 9.13 gælder med de nævnte antagelser at:V (Yt−1) = min
ut
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + x⊤t+1St+1xt+1 + βt+1|Yt−1
ff (9.230)Vi vil nu undersøge den betingede fordeling af:xt+1 = Φxt + Γut +Kt[yt − ϕ
⊤xt] (9.231)
= Φxt + Γut +Kt[ϕ⊤xt + et] (9.232)Idet xt og xt betinget Yt−1 er uafhængige er:
xt+1|Yt−1 ∈ N(Φxt + Γut,Ktϕ⊤PtϕK
⊤t +R2) (9.233)og dermed har vi ifølge sætning 3.14, den statistiske basis at:
En
x⊤t+1St+1xt+1|Yt−1
o
=
= (Φxt + Γut)⊤St+1(Φxt + Γut) + trSt+1(Ktϕ
⊤PtϕK
⊤t +R2)
= z⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
zt + trSt+1Ktϕ⊤PtϕK
⊤t +R2hvor vi igen har anvendt lemma D.1 [side 505 fra appendix D. Da nu
E
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt|Yt−1
ff
= z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + trQ1Pt (9.234)giver (9.230) at:V (Yt−1) = min
ut
z⊤t
»
Q1 Q12
Q⊤12 Q2
–
zt + trQ1Pt + z⊤t
»
Φ⊤St+1Φ Φ⊤St+1Γ
Γ⊤St+1Φ Γ⊤St+1Γ
–
zt.
+ trSt+1Ktϕ⊤PtϕK
⊤t +R2 + βt+1
o
= minut
E
z⊤t
»
Φ⊤St+1Φ +Q1 Φ⊤St+1Γ +Q12
Γ⊤St+1Φ +Q⊤12 Γ⊤St+1Γ +Q2
–
zt
+trQ1Pt + trSt+1Ktϕ⊤PtϕK
⊤t +R2 + βt+1
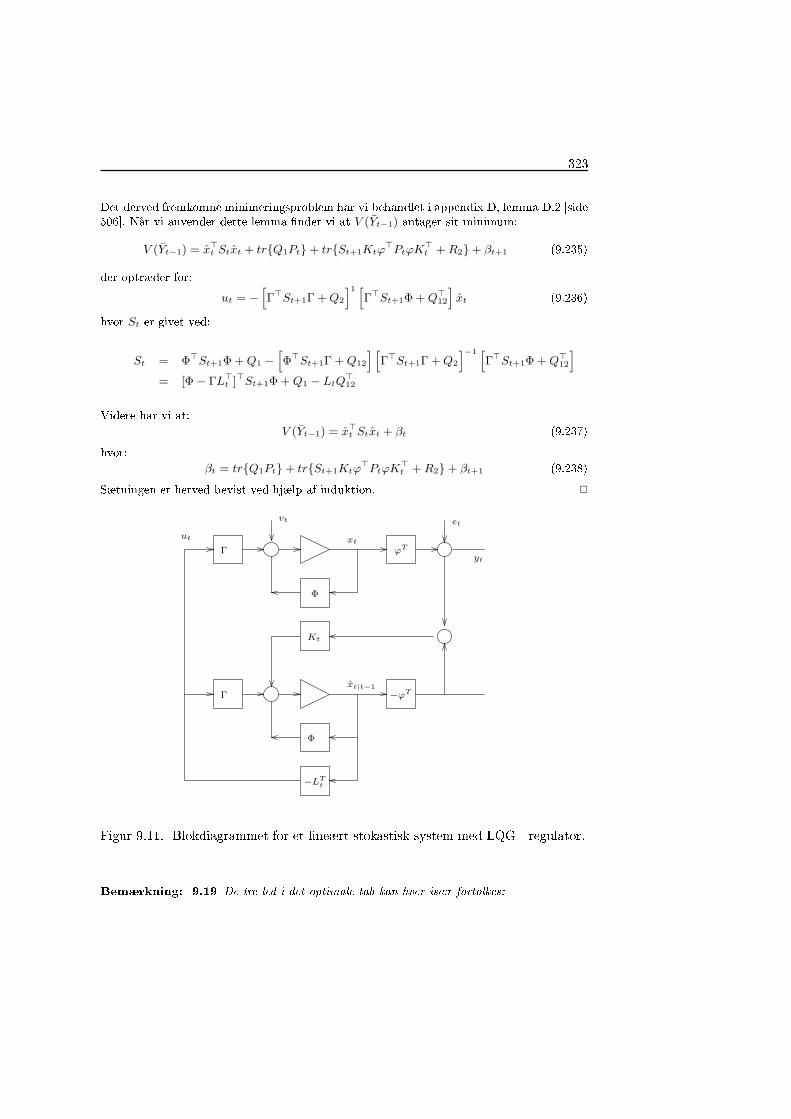
323Det derved fremkomne minimeringsproblem har vi behandlet i appendix D, lemma D.2 [side506. Når vi anvender dette lemma nder vi at V (Yt−1) antager sit minimum:V (Yt−1) = x
⊤t Stxt + trQ1Pt + trSt+1Ktϕ
⊤PtϕK
⊤t +R2 + βt+1 (9.235)der optræder for:
ut = −h
Γ⊤St+1Γ +Q2
i1 h
Γ⊤St+1Φ +Q
⊤12
i
xt (9.236)hvor St er givet ved:St = Φ⊤
St+1Φ +Q1 −h
Φ⊤St+1Γ +Q12
i h
Γ⊤St+1Γ +Q2
i−1 h
Γ⊤St+1Φ +Q
⊤12
i
= [Φ − ΓL⊤t ]⊤St+1Φ +Q1 − LtQ
⊤12Videre har vi at:
V (Yt−1) = x⊤t Stxt + βt (9.237)hvor:
βt = trQ1Pt + trSt+1Ktϕ⊤PtϕK
⊤t +R2 + βt+1 (9.238)Sætningen er herved bevist ved hjælp af induktion. 2
−ϕT
ut
vt
Γxt
ϕT
et
yt
Φ
Kt
Γ
Φ
xt|t−1
−LTtFigur 9.11. Blokdiagrammet for et lineært stokastisk system med LQG - regulator.Bemærkning: 9.19 De tre led i det optimale tab kan hver især fortolkes:

324 9.7 Ufuldstændig Tilstandsinformation II• m⊤
0 St0m0: skyldes, at tilstandene i startøjeblikket har en deterministisk afvigelse fraorigo.• trΣ0St0: skyldes, at tilstandene i startøjeblikket har en stokastisk afvigelse fra origo.• PN
t=t0trR1St+1: skyldes den stokastiske påvirkning fra pro esstøjen.
• PN
t=t0trPtLtΓ
⊤St+1Φ: skyldes at systemtilstandene ikke kendes eksakt, men kunderes estimaterBemærk, at de to første led skyldes initialbetingelsen, det tredie skyldes pro esstøjen og detsidste den ufuldstændige tilstandsinformation. 2Bemærkning: 9.20 Bestemmelsen af Lt og St er identisk i de tre optimale strategier.Forskellen består i hvilken størrelse der kobles tilbage fra. Bemærkning 9.16 og 9.17 fraufuldstændig tilstandsinformation er således også aktuel i dette tilfælde. 2Udvidelse: 18 Det kan vises at den optimale regulering af systemet (9.164) efter det kvadratiskkriterium (9.165) under ufuldstændig tilstandsinformation er givet ved:u(tc) = −LT (tc)x(tc) (9.239)hvor x(tc) er givet ved kalmanlteret angivet i udvidelse 15. 29.7.1 Lukketsløjfe egenskaber IISætning 9.20 er et meget stærkt værktøj til design af regulatorer overfor lineære systemer.Vi vil nu diskutere egenskaberne ved lukketsløjfe systemet. Antag, at systemet er givet ved:
xt+1 = Φxt + Γut + vt xt0 = N(m0, R0) (9.240)yt = ϕ
⊤xt + et (9.241)hvor vt og et er sekvenser af uafhængige N(0, R1) og N(0, R2) fordelte stokastiske vari-able, der er uafhængige af xs for s ≤ t. Hvis reguleringen er baseret på Yt−1 er styresignaletgivet ved:
ut = −L⊤xt = −L⊤
xt|t−1 (9.242)xt+1 = Φxt + Γut +Kt(yt − ϕ
⊤xt) (9.243)Bemærk, at der anvendes et prædiktivt kalmanlter. Lukketsløjfe systemet er af ordenen
2n (n fra systemet og n fra kalmanlteret). Hvis vi skifter koordinatsystem fra (xt, xt) til(xt, xt) får vi beskrivelsen:
xt+1 = (Φ − ΓL⊤t )xt + ΓL⊤
t xt + vt (9.244)xt+1 = (Φ −Ktϕ
⊤)xt −Ktet + vt (9.245)

9.7.1 Lukketsløjfe egenskaber II 325Egenværdierne i lukketsløjfe systemet er bestemt af (Φ − ΓL⊤t ) og (Φ − Ktϕ
⊤), d.v.s. afdynamikken for det tilsvarende deterministiske system og dynamikken af det optimale lter.Hvis matri erne, (Φ − ΓL⊤t ) og (Φ −Ktϕ
⊤) er konstante er egenværdierne for lukketsløjfesystemet givet ved egenværdierne til (Φ − ΓL⊤t ) og (Φ −Ktϕ
⊤). For den stationær løsning(N → ∞ og t0 → −∞) angiver vi uden bevis.Sætning: 9.20 Hvis det dynamiske system er både styre- og observerbart og hvis R2 og Q2erpositivt denitte, da eksisterer entydige stationære løsninger for Ri atiligningerne til bestem-melse af det prædiktive kalmanlter (P,K) og den optimale tilbagekobling (S,L). 2Beskrivelsen af det tilbagekoblede totale system (dvs. system, kalmanlter og tilbagekobling)kan bringes på formen:
xt+1
xt+1
ff
=
»
Φ − ΓL⊤t ΓL⊤
t
0 Φ −Ktϕ⊤
–
xt
xt
ff
+
„
vt
vt −Ktet
« (9.246)Vi er interesseret i at bestemme fordelingen for:zt =
xt
xt
ff
∈ F
„
mt
mt
ff
,
Σ Σ12
Σ⊤12 Σ2
ff« (9.247)For middelværdierne har vi udviklingen:mt+1 = (Φ − ΓL⊤
t )mt + ΓL⊤mt mt0 = m0 (9.248)
mt+1 = (Φ −Ktϕ⊤)mt mt0 = m0 (9.249)Forudsæt i det følgende at egenværdierne for (Φ−ΓL⊤
t ) og (Φ−Ktϕ⊤) ligger klart indenforenheds irklen. Da er:
mt → 0 for t→ ∞ mt → 0 for t0 → −∞ (9.250)Variansen, Pt, for estimationsfejlen, xt, er givet ved Ri ati ligningen (sætning 7.8) for (detprædiktive) kalmanlter, det vil f.eks sige:Pt+1 = (Φ −Ktϕ
⊤)Pt(Φ −Ktϕ⊤)⊤ +R1 +KtR2K
⊤t −R12K
⊤t −KtR
⊤12 (9.251)Idet xt er ukorreleret med xt, gælder der at kovariansen mellem xt og xt er lig Pt. Lad P∞betegne den stationære varians for estimationsfejlen. Vi har således at:
Σ2 = P∞ Σ12 = P∞ (9.252)Til bestemmelse af variansen, Σt, for xt har vi rekursionen:Σt+1 = (Φ − ΓL⊤
t )Σt(Φ − ΓL⊤t )⊤ + ΓL⊤
t PtLtΓ⊤ (9.253)
+(Φ − ΓL⊤t )PtLtΓ
⊤ + ΓL⊤t Pt(Φ − ΓL⊤
t )⊤ +R1 (9.254)Bemærk, at den stationære værdi for Pt kan bestemmes på sædvanlig vis ved undersøgelseaf de stationære egenskaber for det prædiktive kalmanlter, dvs. ud fra (9.251). Derefterkan den stationære varians for xt bestemmes af (9.254).
326 9.7 Ufuldstændig Tilstandsinformation II

Kapitel 10Stokastisk regulering - EksternbeskrivelseI dette kapitel vil vi beskæftige os med en række metoder til regulering og styring af sto-kastiske systemer, der er beskrevet ved en dynamisk sammenhæng mellem (kun) ind - ogudgangssignalerne. De metoder, der vil blive diskuteret, er baseret på lineære systemmodellerog kvadratiske kriterier. Vi vil indledningsvis behandle det basale minimalvariansproblem.Dette problem er stærk knyttet til optimal prædiktion, hvorfor der er kraftige paralleller tilafsnittet om dette emne (kapitel 8). Dette kapitel omhandler derefter reguleringsmetoder,der på forskellig vis kan opfattes som udvidelser af den basale minimalvariansstrategi.10.1 ProblemformuleringDet antages, at det dynamiske system der skal styres, dvs. reguleringsobjektet er lineært,tidsinvariant og er skalart, dvs. har et styresignal, ut, og en udgang, yt. Systemdynamikken erkarakteriseret ved en kombination af en ren tidsforsinkelse og en rationel overføringsfunktion.Det antages at omgivelsernes forstyrrelser kan beskrives som ltreret hvid støj, dvs. har etrationelt spektrum jvf. repræsentationssætningen (5.15).Problemet spe i eres ved at angive systemdynamik, omgivelsers på virkninger, regulerings-kriterium og restriktioner for optimeringen.327

328 10.1 Problemformulering10.1.1 Systemdynamik og omgivelsers påvirkningerDet antages i dette kapitel, at systemet er et lineært tidsinvariant system, der kan beskrivesved:A(q−1)yt = B(q−1)ut + C(q−1)et + d (10.1)hvor:
A(q−1) = 1 + a1q−1 + · · · anaq
−na (10.2)B(q−1) = bkq
−k + bk+1q−k−1 + · · · bnb−kq
−nb−k (10.3)C(q−1) = 1 + c1q
−1 + · · · cncq−nc (10.4)og hvor et er en hvid støjsekvens, der er uafhængig af Yt. Det antages desuden at et ∈
F(0, σ2), hvorved leddet d kan tolkes som et udtryk for middelværdien af forstyrrelserne.Det er ofte tilfældet, at tidsforsinkelsen, k, trækkes ud og ekspli it nævnes i notationen. Idette tilfælde er:B(q−1) = q
−kB(q−1) (10.5)hvor:
B(q−1) = b0 + b1q−1 + · · · + bnb
q−nb b0 6= 0 (10.6)Alternativt til (10.1) kan vi skrive:
A(q−1)yt = q−kB(q−1)ut + C(q−1)et + d (10.7)Det antages at C har alle nulpunkter indenfor enheds irklen. Denne antagelse retfærdiggøres(delvist) af spektralfaktoriseringssætningen.
yt
q−kB
C
A−1
et
utFigur 10.1. Stokastisk system på ARMAX-formBeskrivelsen i (10.1) og (10.7) kan anvendes på to måder. I det generiske tilfælde, hvor Aog B samt A og C er indbyrdes primiske (ikke har fælles faktorer) udgør beskrivelsen i(10.7) den spe ielle ARMAX-struktur. Imidlertid kan (10.7) også opfattes som en alternativmåde at opskrive et LTI-system. (Med mindre beskrivelsen er en ARMAX-beskrivelse vilder eksistere fælles faktorer mellem de indgående polynomier.Generelt vil et LTI-system kunne beskrives af L-strukturen:A(q−1)yt = q
−kB(q−1)
F (q−1)ut +
C(q−1)
D(q−1)et + d (10.8)

10.1.2 Kriterium 329hvor de fælles poler i de overføringsfunktioner er samlet i A. De poler, der er unikke foroverføringsfunktionerne er arrangeret i F og D, henholdsvis. I L-strukturen antager vi atD(0) = F (0) = 1. Bemærk, at denne beskrivelse indeholder ARMAX- og BJ-strukturernesom spe ialtilfælde. Bemærk, ligeledes L-strukturen kan transformeres til formen i (10.7).I dette kapitel vil vi udvikle reguleringer, der er baseret på beskrivelsen (10.7), hvilketspe ielt gælder for ARMAX-strukturen. Disse resultater kan efterfølgende transformeres tilden generelle L-struktur.I det førstkommende afsnit vil vi betragte reguleringproblemet og antage, at referen ener identisk nul. I de senere afsnit vil vi inkludere referen esignalet og dets variationer iovervejelserne. Referen esignalet kan opfattes som en påvirkning eller forstyrrelse til detstyrede system. For på optimal vis at inkludere disse forstyrrelser er det nødvendigt atmodellere dem. En typisk model for et referen esignals variation er:
wt =1
1 − q−1et (10.9)hvor et følger en ompoundfordeling som angivet i eksempel 3.8 [side 126. Et andet eksempelkunne være modellen:
wt =1
(1 − q−1)2et (10.10)Et tredie eksempel er variationen:
wt = a0cos(ωt) +1
1 − aq−1ξt (10.11)(hvor ξt er hvid støj). Under alle omstændigheder arbejdes med hypotesen at:
wt+k = wt+k|t + wt+k|t (10.12)hvor w og w kan ndes vha. sætning 8.1 [side 278.10.1.2 KriteriumVort mål med reguleringen i det basale tilfælde er løst sagt at holde udgangen så tæt ved nulsom muligt. Lidt mere stringent skal vi bestemme styresignalet, ut, således, at den forventedeværdi af kvadratet på udgangen er minimalt eller således at kriteriet:Jt = Ey2
t+k (10.13)i stationaritet antager sit minimum. Dette skal selvfølgelig ske under skyldig hensyntagentil de restriktioner der begrænser optimeringsproblemet.Vi vil senere betragte metoder der er baseret på varianter af dette kriterium. Det vil ivisse sammenhænge være interessant at inkludere referen esignalet i styringen, dvs. løse detsåkaldte servoproblem. Endvidere er det relevant at betragte styringer, der tager hensyn tilbegrænsninger i den a eptable styreeekt.
330 10.1 Problemformulering10.1.3 RestriktionerDet antages at reguleringen er kausal, dvs. at styresignalet, ut, er en funktion af kendtemålinger yt, yt−1, ... samt af forrige styresignaler, ut−1, ut−2, .... Hvis vi på sædvanlig vissamler disse kendte signaler i Yt er restriktionen:ut = funkYt (10.14)Eksempel: 10.1 Betragt følgende førsteordens system:
yt − ayt−1 = but−1 + et + cet−1 (10.15)hvor et er en sekvens af uafhængige F(0, σ2)-fordelte stokastiske variable og hvor:a = 0.89 b = 1.23 c = −0.34 (10.16)Bemærk at |c| < 1.Betragt nu situationen ved tidspunktet t og antag at udgangsværdierne yt, yt−1, ... er målt. Ideen erat bestemme ut således, at yt+1 er så tæt ved nul som muligt. Idet:yt+1 = [ayt + but + cet] + et+1 (10.17)kan yt+1 ændres til en vilkårlig værdi ved passende valg af ut. Da nu et+1 er uafhængig af Yt harvi et undertal for variansen:V aryt+1 ≥ V aret+1 = σ2 (10.18)Udfaldet af støjbidraget et kan beregnes ud fra de kendte data, Yt. Hvis vi anvender regulatoren:
ut = −1
b[ayt + cet] (10.19)gælder der i stationaritet at yt+1 = et+1, hvilket præ ist svarer til undertallet. Hvis minimalvari-ansregulatoren er anvendt i alle tidspunkter (d.v.s. fra −∞) da er beregningen af et ud fra data(dvs. Yt) triviel, idet et = yt. Minimalvariansregulatoren kan da skrives som:
ut = −1
b[ayt + cet] = −a + c
byt (10.20)hvilket (for dette simple system) blot er en P-regulator. Bemærk, at støjens egenskaber (korrelations-truktur) er inkluderet i reguleringen (afhænger af a og c). For at analysere lukketsløjfe egenskaberindsættes regulatoren i systembeskrivelsen, hvorved vi får at:
yt + cyt−1 = et + cet−1 (10.21)der for |c| < 1 giver at yt = et i stationaritet. Antag nu at regulatoren indkobling til tidspunktet t0.Da gælder at:yt = et + (−c)t−t0 [yt0 − et0 ] (10.22)hvilket viser hvorledes C-polynomiets nulpunkter også påvirker de transiente egenskaber af den luk-kede sløjfe.Vi kan bemærke, at størrelsen ayt + but + cet kan fortolkes som det bedste estimat (prædiktion) af
yt+1 baseret på tilgængelig data (Yt). Størrelsen et+1 er følgelig lig prædiktionfejlen. I minimalvari-ansregulatoren bestemmes styresignalet således at prædiktionen er lig referen esignalet, der i detteeksempel er nul. Styrefejlen er tilsvarende lig prædiktionsfejlen. 2I ovenstående eksempel så vi, at minimalvarians regulering er meget stærkt knyttet til præ-diktionsproblemet. Dette er endvidere tilfældet for de este reguleringsstrategier, der erbaseret på en stokastisk beskrivelse af dynamiske systemer.
33110.2 MinimalvariansreguleringI kapitel 8 har vi bl. a. beskæftiget os med hvorledes vi kan prædiktere, dvs. forudsige hvilkekonsekvenser et styreindgreb har. Lad os nu fokusere på hvorledes vi på optimal vis kanstyre et givet system. Dette leder til den basale minimalvariansregulator. Målet med denneregulator er at styre systemet således at kriteriet:J = Ey2
t+k (10.23)i stationaritet er minimalt. Vi antager, at system og omgivelsers på virkning af sammekan beskrives ved (10.7) med d = 0. Vi antager desuden at B og C-polynomierne har allenulpunkter indenfor enheds irklen. I dette basale minimalvarianstilfælde har vi følgendesætning.Sætning: 10.1 Antag, at systemet er givet ved (10.7) med d = 0. Løsningen til det basaleminimalvariansproblem er givet ved regulatoren:B(q−1)G(q−1)ut = −S(q−1)yt (10.24)hvor G og S er polynomier med orden:
ord(G) = k − 1 ord(S) = Max(na − 1, nc − k) (10.25)og er deneret ved diophantineligningen:C(q−1) = A(q−1)G(q−1) + q
−kS(q−1) (10.26)Styrefejlen er givet ved
yt = G(q−1)et (10.27)i stationaritet og er en MA(k)-pro es. 2Bevis: Betragt forholdene ved tidspunktet t. Idet tidsforsinkelsen gennem systemet er k trinkan vi med styresignalet, ut, kun påvirke udgangssignalet til tidspunktet t+ k og fremefter.Ifølge sætning 8.2 har vi at:yt+k =
1
C[BGut + Syt] +Get+k (10.28)og dermed er:
Jt+k = Ey2t+k = E
(
»
1
C(BGut + Syt)
–2)
+ E˘
[Get+k]2¯ (10.29)idet Get+k = et+k + · · ·+ gk−1et+1 er uafhængig af Yt. Da det sidste led er uafhængig af utoptræder minimum for J , når første led er identisk nul. Dette er opfyldt for den i sætningenangivne regulator, når C-polynomiet har alle nulpunkter indenfor enheds irklen. 2

332 10.2 MinimalvariansreguleringBemærkning: 10.1 Bemærk, at fejlen ved indkobling af regulatoren har et indsvingning-forløb mod Get, der er bestemt af nulpunkterne i C-polynomiet. 2Bemærkning: 10.2 Bemærk, at regulering svarer til at sætte k-trinsprædiktionen af yt tilnul. 2Bemærkning: 10.3 Bemærk, at polerne til den lukkede sløjfe er nulpunkter til:1 +
S
BGz−kB
A(10.30)eller nulpunkter til:
C = ABG+ z−kBS = B(AG+ z
kS) = BC (10.31)Dvs. at den basale minimalvariansregulator kun stabiliserer minimumfase systemer (d.v.s.systemer med nulpunkter til B-polynomiet der klart ligger indenfor enheds irklen). Endvidereskal C-polynomiet have alle nulpunkter indenfor enheds irklen. 2
1BG
C
q−kB
ut
yt
et
A−1
−SFigur 10.2. Basal minimalvariansregulering af system på ARMAX-formEksempel: 10.2 Antag at en analyse af et dynamisk system og dets forstyrrelser er resulteret ien systemmodel med som angivet i (10.7) med:A = 1 − 1.7q−1 + 0.7q−2 (10.32)B = 1 + 0.5q−1 k = 1 (10.33)
C = 1 + 1.5q−1 + 0.9q−2 et ∈ F(0, σ2) (10.34)Vi vil først undersøge forholdene for k = 1. Til bestemmelse af regulatoren anvender vi diophantineligningen (10.26) der i vores tilfælde lyder:(1 + 1.5q−1 + 0.9q−2) = (1 − 1.7q−1 + 0.7q−2)1 + q−1(s0 + s1q−1) (10.35)Løsningen ndes ved at identi ere koe ienterne til q−i, hvorved vi får:
0 : 1 = 1 (10.36)1 : 1.5 = −1.7 + s0 (10.37)2 : 0.9 = 0.7 + s1 (10.38)

333Følgelig er s0 = 3.2 og s1 = 0.2. Minimalvarians regulatoren er derfor givet ved:ut = − S
BGyt = −3.2 + 0.2q−1
1 + 0.5q−1yt (10.39)eller:
ut = −0.5ut−1 − 3.2yt − 0.2yt−1 (10.40)Med denne regulering vil fejlen i stationaritet være yt = et. Vi vil nu undersøge hvor meget regu-leringskvaliteten forringes ved en øget tidsforsinkelse gennem systemet. For k = 2 er diophantineligningen:(1 + 1.5q−1 + 0.9q−2)yt = (1 − 1.7q−1 + 0.7q−2)(1 + g1q−1) + q−1(s0 + s1q−1) (10.41)og løsningen til ligningssystemet: VS. HS.0 1 11 1.5 −1.7 + g12 0.9 0.7 − 1.7g1 + s03 0 0.7g1 + s1er givet ved at:
g1 = 3.2 s0 = 5.64 s1 = −2.24 (10.42)Minimalvariansregulatoren er:ut = − S
BG= − 5.64 − 2.224q−1
1 + 3.7q−1 + 1.6q−2yt (10.43)eller:
ut = −5.64yt + 2.24yt−1 − 3.7ut−1 − 1.6ut−2 (10.44)Med denne regulering bliver den stationære fejl lig:yt = et + 3.2et−1 (10.45)der har en varians på
V aryt = (1 + 3.22)σ2 = 11.24σ2 (10.46)I dette eksempel vil fejlvariansen stige betydelig ved en yderligere tidsforsinkelse gennem systemet.2Eksempel: 10.3 Lad os betragte et system givet ved en ARMAX-struktur, hvor:
A = 1 − 1.5q−1 + 0.95q−2 B = 1 + 0.5q−1 k = 1 (10.47)C = 1 − 0.95q−1 σ2 = (0.1)2 (10.48)For dette system er den basale minimalvariansregulator givet ved:
R = BG = 1 + 0.5q−1 S = 0.55 − 0.95q−1 (10.49)dvs. ved:ut = −0.5ut−1 − 0.55yt + 0.95yt−1 (10.50)Udgangs- og styresignal er under stationære forhold vist i gur 10.3. I gur 10.4 [side 335 er etindkoblingsforløb vist. Bemærk variansreduktionen. 2
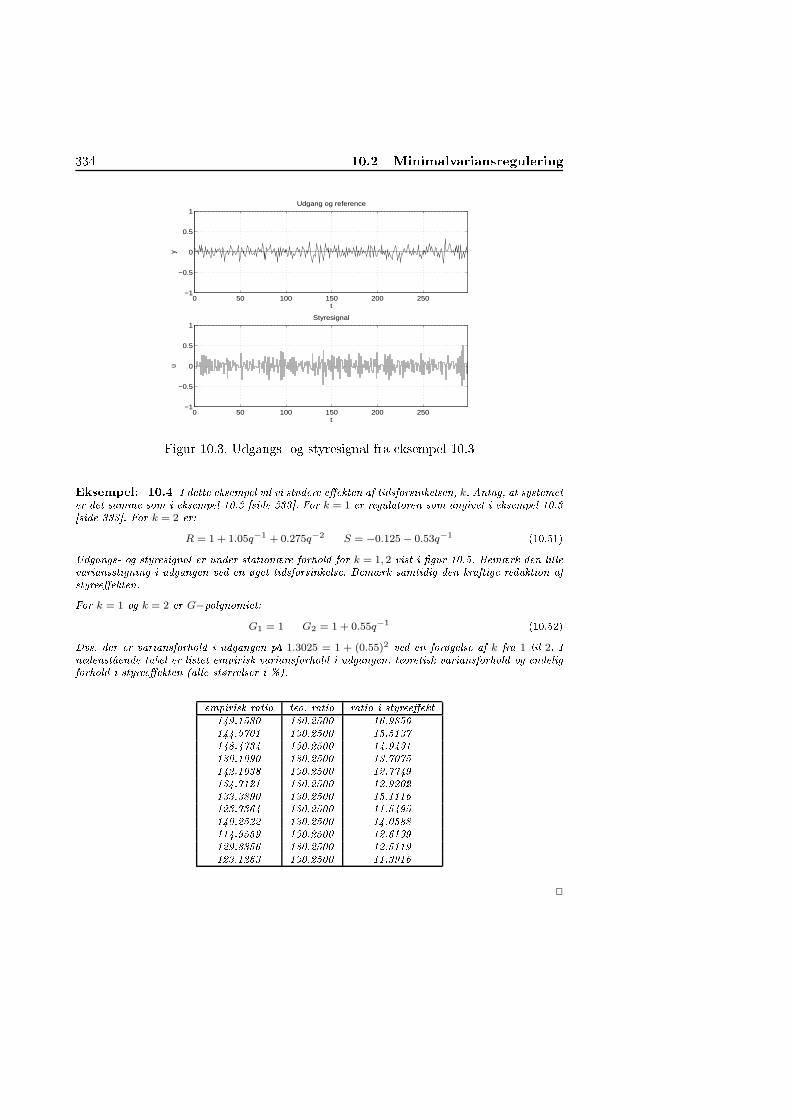
334 10.2 Minimalvariansregulering0 50 100 150 200 250
−1
−0.5
0
0.5
1
y
t
Udgang og reference
0 50 100 150 200 250−1
−0.5
0
0.5
1
u
t
Styresignal
Figur 10.3. Udgangs- og styresignal fra eksempel 10.3Eksempel: 10.4 I dette eksempel vil vi studere eekten af tidsforsinkelsen, k. Antag, at systemeter det samme som i eksempel 10.3 [side 333. For k = 1 er regulatoren som angivet i eksempel 10.3[side 333. For k = 2 er:R = 1 + 1.05q−1 + 0.275q−2 S = −0.125 − 0.53q−1 (10.51)Udgangs- og styresignal er under stationære forhold for k = 1, 2 vist i gur 10.5. Bemærk den lillevariansstigning i udgangen ved en øget tidsforsinkelse. Bemærk samtidig den kraftige reduktion afstyreeekten.For k = 1 og k = 2 er G−polynomiet:
G1 = 1 G2 = 1 + 0.55q−1 (10.52)Dvs. der er variansforhold i udgangen på 1.3025 = 1 + (0.55)2 ved en forøgelse af k fra 1 til 2. Inedenstående tabel er listet empirisk variansforhold i udgangen, teoretisk variansforhold og endeligforhold i styreeekten (alle størrelser i %).empirisk ratio teo. ratio ratio i styreeekt149.1580 130.2500 16.9856144.9701 130.2500 15.5137148.4734 130.2500 14.9431130.1090 130.2500 13.7075142.1038 130.2500 12.7749134.7121 130.2500 12.9202133.3890 130.2500 15.1116123.7364 130.2500 11.5495140.2522 130.2500 14.0588114.9559 130.2500 12.6139129.8356 130.2500 12.5119123.1263 130.2500 11.39162
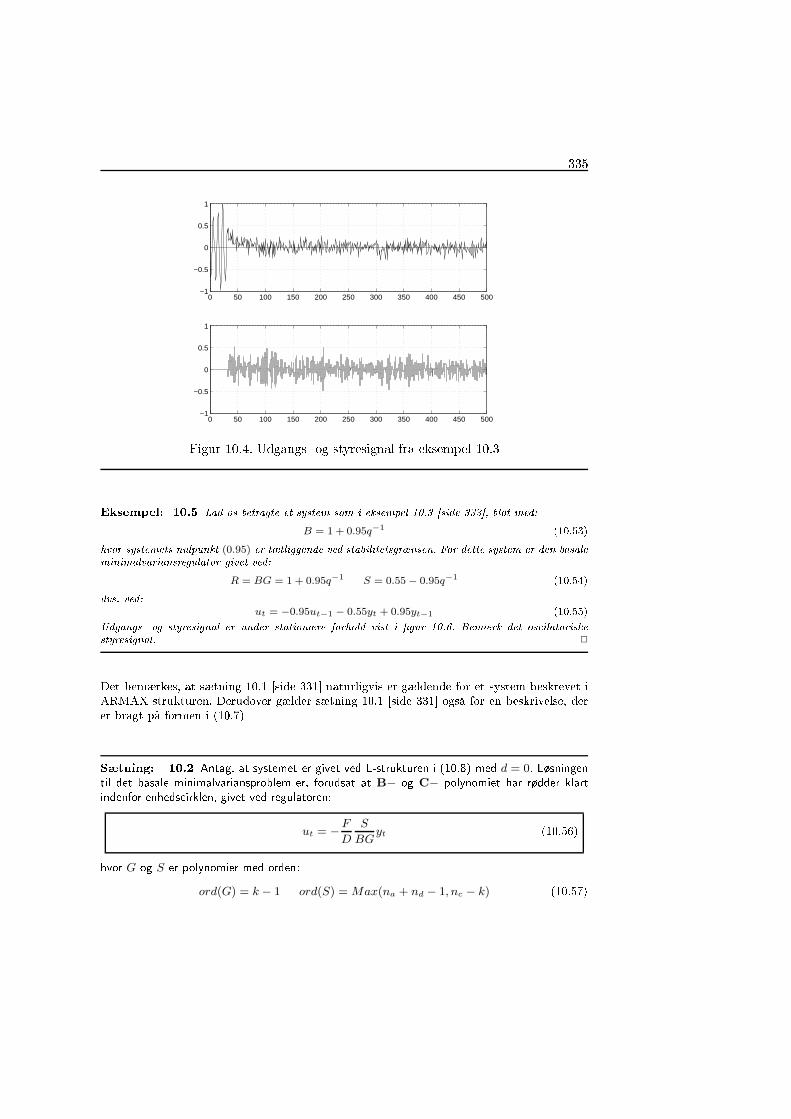
3350 50 100 150 200 250 300 350 400 450 500
−1
−0.5
0
0.5
1
0 50 100 150 200 250 300 350 400 450 500−1
−0.5
0
0.5
1
Figur 10.4. Udgangs- og styresignal fra eksempel 10.3Eksempel: 10.5 Lad os betragte et system som i eksempel 10.3 [side 333, blot med:B = 1 + 0.95q−1 (10.53)hvor systemets nulpunkt (0.95) er tætliggende ved stabilitetsgrænsen. For dette system er den basaleminimalvariansregulator givet ved:
R = BG = 1 + 0.95q−1 S = 0.55 − 0.95q−1 (10.54)dvs. ved:ut = −0.95ut−1 − 0.55yt + 0.95yt−1 (10.55)Udgangs- og styresignal er under stationære forhold vist i gur 10.6. Bemærk det os ilatoriskestyresignal. 2Det bemærkes, at sætning 10.1 [side 331 naturligvis er gældende for et system beskrevet iARMAX-strukturen. Derudover gælder sætning 10.1 [side 331 også for en beskrivelse, derer bragt på formen i (10.7)Sætning: 10.2 Antag, at systemet er givet ved L-strukturen i (10.8) med d = 0. Løsningentil det basale minimalvariansproblem er, forudsat at B− og C− polynomiet har rødder klartindenfor enheds irklen, givet ved regulatoren:
ut = −F
D
S
BGyt (10.56)hvor G og S er polynomier med orden:
ord(G) = k − 1 ord(S) = Max(na + nd − 1, nc − k) (10.57)
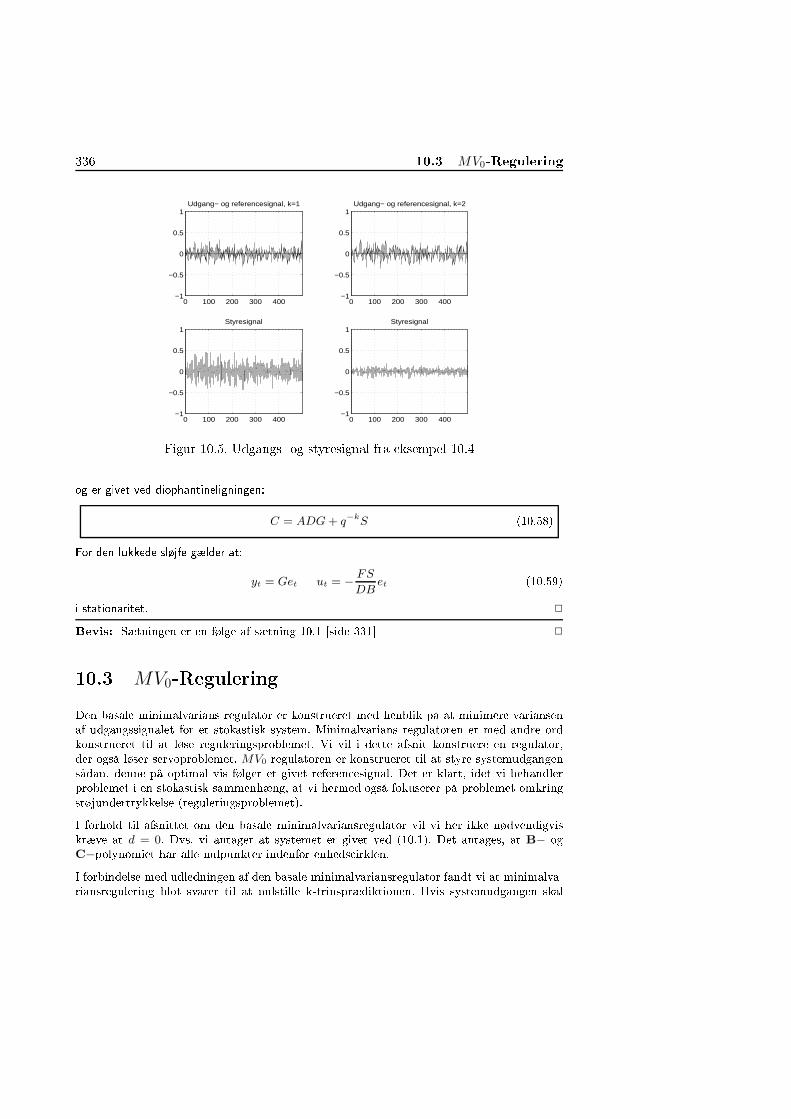
336 10.3 MV0-Regulering0 100 200 300 400
−1
−0.5
0
0.5
1Udgang− og referencesignal, k=1
0 100 200 300 400−1
−0.5
0
0.5
1Styresignal
0 100 200 300 400−1
−0.5
0
0.5
1Udgang− og referencesignal, k=2
0 100 200 300 400−1
−0.5
0
0.5
1Styresignal
Figur 10.5. Udgangs- og styresignal fra eksempel 10.4og er givet ved diophantineligningen:C = ADG+ q
−kS (10.58)For den lukkede sløjfe gælder at:
yt = Get ut = − FS
DBet (10.59)i stationaritet. 2Bevis: Sætningen er en følge af sætning 10.1 [side 331 210.3 MV0-ReguleringDen basale minimalvarians regulator er konstrueret med henblik på at minimere variansenaf udgangssignalet for et stokastisk system. Minimalvarians regulatoren er med andre ordkonstrueret til at løse reguleringsproblemet. Vi vil i dette afsnit konstruere en regulator,der også løser servoproblemet. MV0-regulatoren er konstrueret til at styre systemudgangensådan, denne på optimal vis følger et givet referen esignal. Det er klart, idet vi behandlerproblemet i en stokastisk sammenhæng, at vi hermed også fokuserer på problemet omkringstøjundertrykkelse (reguleringsproblemet).I forhold til afsnittet om den basale minimalvariansregulator vil vi her ikke nødvendigviskræve at d = 0. Dvs. vi antager at systemet er givet ved (10.1). Det antages, at B− og
C−polynomiet har alle nulpunkter indenfor enheds irklen.I forbindelse med udledningen af den basale minimalvariansregulator fandt vi at minimalva-riansregulering blot svarer til at nulstille k-trinsprædiktionen. Hvis systemudgangen skal

3370 50 100 150 200 250 300 350 400 450 500
−0.4
−0.2
0
0.2
0.4Udgangssignal
0 50 100 150 200 250 300 350 400 450−2
−1
0
1
2Styresignal
Figur 10.6. Udgangs- og styresignal fra eksempel 10.5følge et referen esignal kan vi derfor ændre dette til at bestemme styresignalet sådan atprædiktionen er identisk med det nuværende referen esignal. Lidt mere stringent er MV0-regulatoren designet til at minimere kriteriet:Jt = E
˘
(yt+k − wt)2¯ (10.60)under hensyntagen til at regulatoren skal være kausal. Regulatoren er givet i sætning 10.3.Sætning: 10.3 Antag, at systemet er givet som i [side 328 (10.7) og at nulpunkterne til B-og C-polynomierne ligger klart indenfor enheds irklen. Da er MV0-regulatoren givet ved:
BGut = Cwt − Syt −Gd (10.61)hvor polynomierne, G og S, er løsninger til diophantine ligningen:C = AG+ q
−kS (10.62)hvor G(0) = 1 og ord(G) = k − 1. Desuden er ord(S) = max(na − 1, nc − k). 2Bevis: Hvis vi anvender samme fremgangsmåde som ved beviset for sætning 8.7, har vi at:
yt+k =1
C[BGut + Syt +Gd] +Get+k (10.63)Bemærk, at forskellen blot består i påvirkningen fra den konstante belastning. Videre gælderat:
yt+k − wt =1
C[BGut + Syt − Cwt +Gd] +Get+k (10.64)

338 10.3 MV0-ReguleringDa nu Get+k er uafhængige af de øvrige led, er kriteriefunktionen lig med:Jt = E
˘
(yt+k −wt)2¯ (10.65)
=
1
C[BGut + Syt −Cwt +Gd]
ff2
+ V arGet+k (10.66)D.v.s. at:Jt ≥ V arGet+k (10.67)Når alle nulpunkter i C-polynomiet ligger indenfor enheds irklen gælder der i stationaritet(dvs. for t0 → −∞) at:Jt = V arGet+k (10.68)for MV0-regulatoren. 2
C
wt
−Gd
ut
q−kB
C
et d
yt
A−1
−S
1BG
Figur 10.7. Blokdiagram for MV0-regulator.Det kan relativt let vises af MV0-regulatoren blot er en basal minimalvariansregulering affejlen:ζt = yt − q
−kwt (10.69)suppleret med en fremkobling fra referen esignalet samt en kompensering af den konstanteforstyrrelse. Ved at eliminere yt i (10.69) og indsætte i (10.61) fås:
ut =A
Bwt − S
BGζt − 1
Bd (10.70)I en ikke-adaptiv sammenhæng er det ikke altid hensigtsmæssigt at udkompensere den kon-stante forstyrrelse ved en fremkobling som i (10.61) eller i (10.69). Som alternativ kan man ien ikke adaptiv sammenhæng anvende en integralvirkning for at udkompensere belastningen,dvs. at anvende regulatoren:
ut =A
Bwt − S
BGζt − α
1 − q−1ζt (10.71)hvor α er et passende (der ikke forringer stabiliteten af den lukkede sløjfe) lille. Man kanfortolke det sidste led i regulatoren, som et (primitivt) estimat af (og kompensation for)belastningen.

339Lad os nu analysere lukketsløjfe egenskaber for et reguleringssystem, der er baseret på enMV0-regulator. Man kan anvende standard manipulationer til at bestemme de interessanteoverføringsfunktioner, men man kan også direkte regne på systembeskrive og regulator.Overføringsfunktionerne er samlet i sætning 10.4.Sætning: 10.4 Antag, at forudsætningerne for sætning 10.3 [side 337 er opfyldt. For MV0-regulatoren gælder der i stationaritet at:
yt = q−kwt +Get (10.72)og at:
ut =A
Bwt − S
Bet − 1
Bd (10.73)Indsvingforløbet mod de stationære forhold er bestemt af nulpunkterne i C-polynomiet. 2Bevis: Overføringerne til udgangen, (10.72), fremkommer direkte ved at indsætte MV0-regulatoren, (10.61) i (10.63). Indsvingningen mod den stationære (efter en indkobling afregulatoren) foregår efter nulpunkterne til C-polynomiet. Når (10.72) for yt indsættes iregulatoren nder vi at:
BGut = Cwt − S(q−kwt +Get) −Gd (10.74)eller idet (jvf. (10.62)):
C − q−kS = AG (10.75)at:
But = Awt − Set − d (10.76)qed. 2Bemærkning: 10.4 Det bemærkes at denne regulator ikke kan anvendes overfor systemermed nulpunkter undenfor enheds irklen, fordi B-polynomiet optræder i nævneren i overfø-ringsfunktionerne til styresignalet. En anvendelse af regulatoren er endvidere problematisk,hvis systemets nulpunkter ligger tæt på enheds irklen. 2Bemærkning: 10.5 Bemærk at denne regulator plomberer alle systemet nulpunkter. 2Eksempel: 10.6 Lad os endnu engang betragte systemet fra eksempel 10.3 [side 333. For dettesystem er MV0−regulatoren givet ved:Q = C = 1 − 0.95q−1 R = BG = 1 + 0.5q−1 S = 0.55 − 0.95q−1 (10.77)dvs. ved:
ut = −0.5ut−1 + wt − 0.95wt−1 − 0.55yt + 0.95yt−1 (10.78)Udgangs- og styresignal er vist i gur 10.8, når referen esignalet er en rkantbølge. I gur 10.9[side 341 er et indkoblingsforløb vist. Her er referen esignalet konstant lig 1. 2
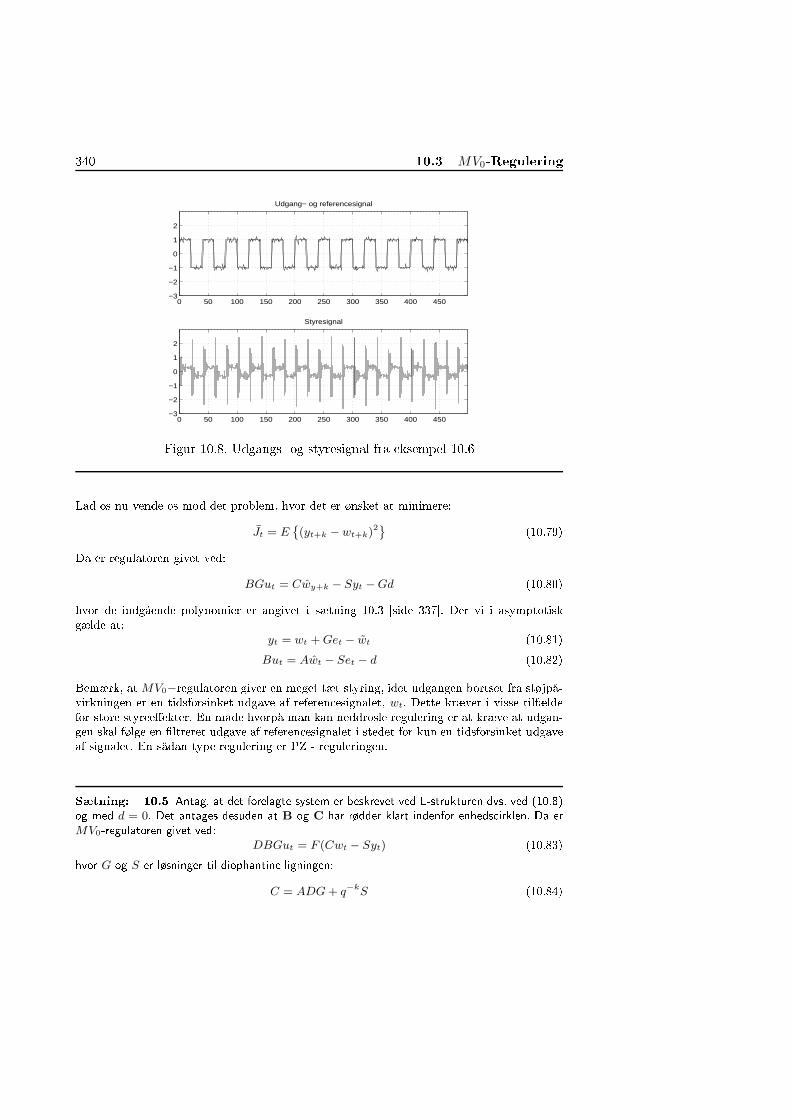
340 10.3 MV0-Regulering0 50 100 150 200 250 300 350 400 450
−3
−2
−1
0
1
2
Udgang− og referencesignal
0 50 100 150 200 250 300 350 400 450−3
−2
−1
0
1
2
Styresignal
Figur 10.8. Udgangs- og styresignal fra eksempel 10.6Lad os nu vende os mod det problem, hvor det er ønsket at minimere:Jt = E
˘
(yt+k −wt+k)2¯ (10.79)Da er regulatoren givet ved:
BGut = Cwy+k − Syt −Gd (10.80)hvor de indgående polynomier er angivet i sætning 10.3 [side 337. Der vi i asymptotiskgælde at:yt = wt +Get − wt (10.81)But = Awt − Set − d (10.82)Bemærk, atMV0−regulatoren giver en meget tæt styring, idet udgangen bortset fra støjpå-virkningen er en tidsforsinket udgave af referen esignalet, wt. Dette kræver i visse tilfældefor store styreeekter. En måde hvorpå man kan neddrosle regulering er at kræve at udgan-gen skal følge en ltreret udgave af referen esignalet i stedet for kun en tidsforsinket udgaveaf signalet. En sådan type regulering er PZ - reguleringen.Sætning: 10.5 Antag, at det forelagte system er beskrevet ved L-strukturen dvs. ved (10.8)og med d = 0. Det antages desuden at B og C har rødder klart indenfor enheds irklen. Da er
MV0-regulatoren givet ved:DBGut = F (Cwt − Syt) (10.83)hvor G og S er løsninger til diophantine ligningen:
C = ADG+ q−kS (10.84)
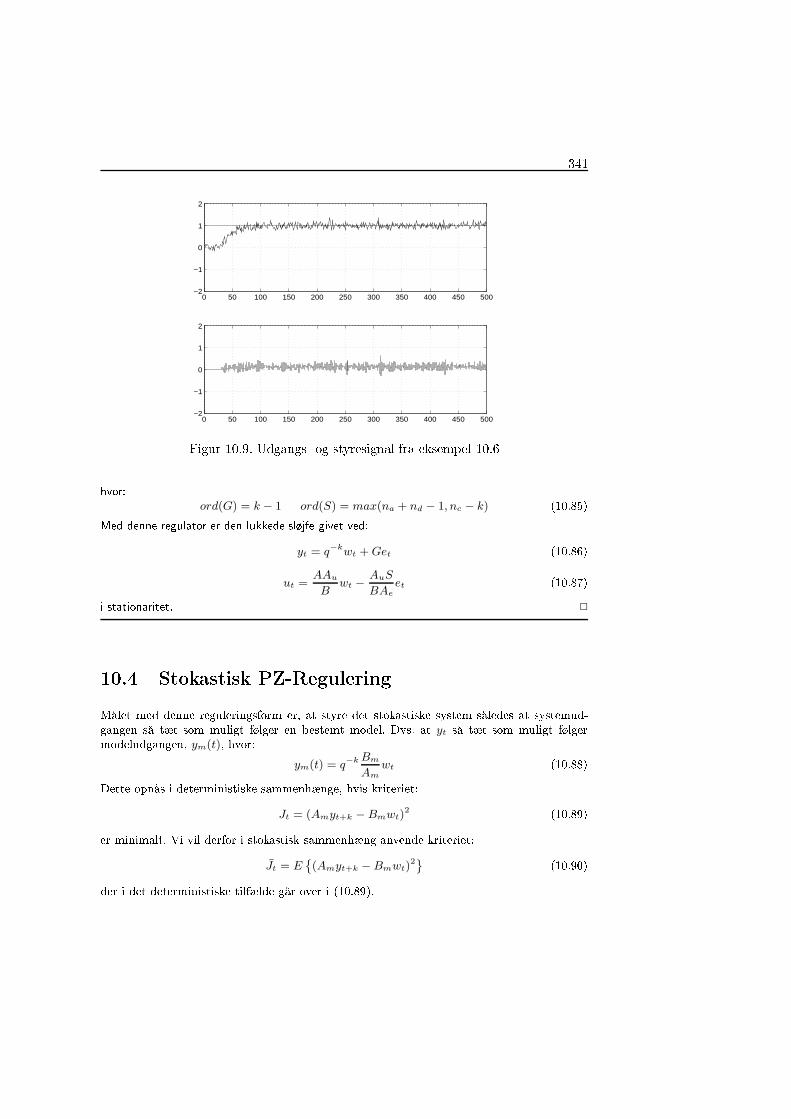
3410 50 100 150 200 250 300 350 400 450 500
−2
−1
0
1
2
0 50 100 150 200 250 300 350 400 450 500−2
−1
0
1
2
Figur 10.9. Udgangs- og styresignal fra eksempel 10.6hvor:ord(G) = k − 1 ord(S) = max(na + nd − 1, nc − k) (10.85)Med denne regulator er den lukkede sløjfe givet ved:
yt = q−kwt +Get (10.86)
ut =AAu
Bwt − AuS
BAe
et (10.87)i stationaritet. 210.4 Stokastisk PZ-ReguleringMålet med denne reguleringsform er, at styre det stokastiske system således at systemud-gangen så tæt som muligt følger en bestemt model. Dvs. at yt så tæt som muligt følgermodeludgangen, ym(t), hvor:ym(t) = q
−kBm
Am
wt (10.88)Dette opnås i deterministiske sammenhænge, hvis kriteriet:Jt = (Amyt+k −Bmwt)
2 (10.89)er minimalt. Vi vil derfor i stokastisk sammenhæng anvende kriteriet:Jt = E
˘
(Amyt+k −Bmwt)2¯ (10.90)der i det deterministiske tilfælde går over i (10.89).

342 10.4 Stokastisk PZ-ReguleringPZ-regulatoren (PZ for pole-zero) er givet ved sætning 10.6. Denne regulator betegnes somen PZ-regulator fordi den både plomberer systemets nulpunkter og pla erer lukketsløjfesy-stemets poler.Sætning: 10.6 Antag, at systemet er givet som i [side 328 (10.7) og at nulpunkterne tilB-og C-polynomierne ligger klart indenfor enheds irklen. Da er PZ-regulatoren givet ved:
BGut = BmCwt − Syt −Gd (10.91)hvor polynomierne, G og S, er løsninger til diophantine ligningen:AmC = AG+ q
−kS (10.92)hvor G(0) = 1 og ord(G) = k − 1. Ordenen af S-polynomiet er:
ord(S) = max(na − 1, nc + nam − k) (10.93)2Bevis: Beviset er prin ipielt det samme som forMV0-regulatoren, med med visse udvidelserrelateret til det ændrede kriterium. Idet vi anvender diophantine ligningen (10.92) har vi at:
AmCyt+k = AGyt+k + Syt (10.94)= G[But + Cet+k + d] + Syt (10.95)hvor systemligningen (10.7) er anvendt i sidste udregningen. Videre gælder at:
Amyt+k −Bmwt =1
C[BGut + Syt +Gd] +Get+k −Bmwt (10.96)
=1
C[BGut + Syt − CBmwt +Gd] +Get+k (10.97)hvor igen Get+k er uafhængig af udtrykkets første led. Kriteriet er derfor minimalt, nårførste led er lig nul, hvilket netop (i stationaritet) sker for PZ - regulatoren. 2Bemærk, at fejlen, Amyt − q−kBmwt, ved indkobling af regulatoren asymptotisk nærmersig den stationære fejl, Get, med en indsvingning, der er bestemt af nulpunkterne i C-polynomiet.Bemærk, at denne regulatorer formelt svarer til deterministisk polpla ering med fuld nul-punktsplombering med et spe ielt valg af observerpolynomium, Ao. Denne stokastiske regu-lator svarer til valget Ao = C.Bemærk, at denne regulatortype ligesom spe ialtilfældet, MV0-regulatoren, kræver et kend-skab til tidsforsinkelsen, k, gennem systemet.
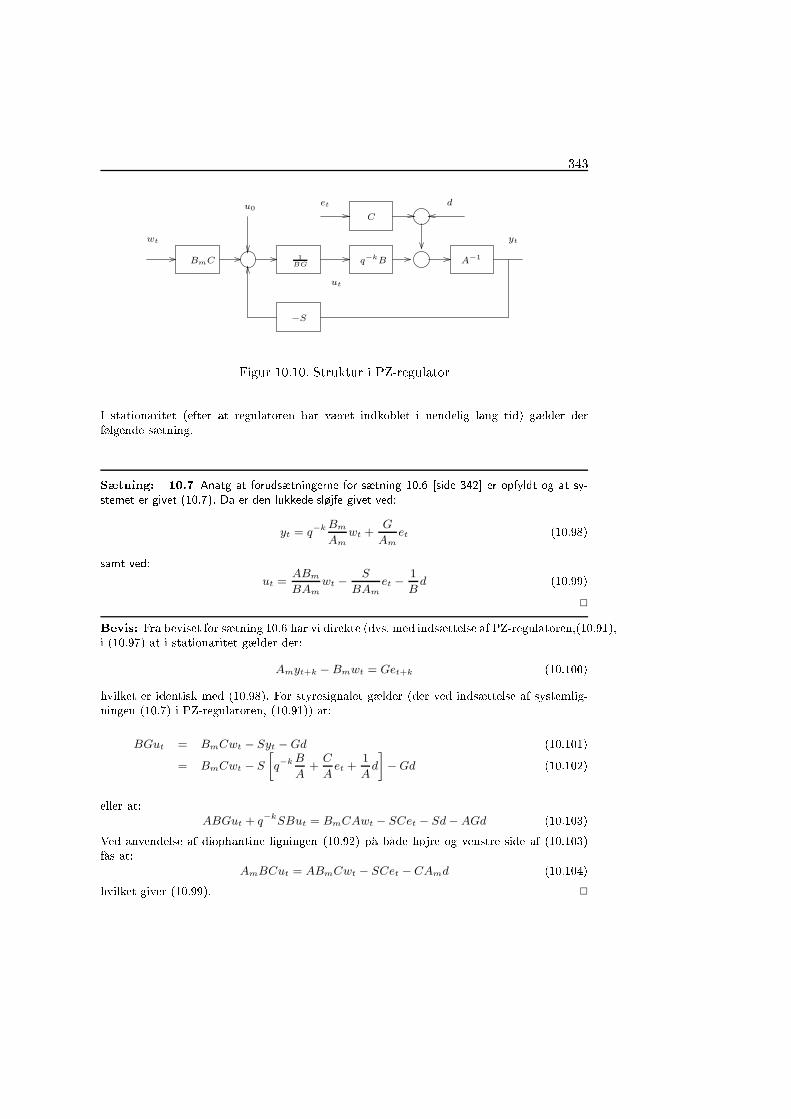
3431
BG
wt
BmC
u0
−S
ut
et
C
q−kB
d
yt
A−1
Figur 10.10. Struktur i PZ-regulatorI stationaritet (efter at regulatoren har været indkoblet i uendelig lang tid) gælder derfølgende sætning.Sætning: 10.7 Anatg at forudsætningerne for sætning 10.6 [side 342 er opfyldt og at sy-stemet er givet (10.7). Da er den lukkede sløjfe givet ved:yt = q
−kBm
Am
wt +G
Am
et (10.98)samt ved:ut =
ABm
BAm
wt − S
BAm
et − 1
Bd (10.99)
2Bevis: Fra beviset for sætning 10.6 har vi direkte (dvs. med indsættelse af PZ-regulatoren,(10.91),i (10.97) at i stationaritet gælder der:Amyt+k −Bmwt = Get+k (10.100)hvilket er identisk med (10.98). For styresignalet gælder (der ved indsættelse af systemlig-ningen (10.7) i PZ-regulatoren, (10.91)) at:
BGut = BmCwt − Syt −Gd (10.101)= BmCwt − S
»
q−kB
A+C
Aet +
1
Ad
–
−Gd (10.102)eller at:ABGut + q
−kSBut = BmCAwt − SCet − Sd− AGd (10.103)Ved anvendelse af diophantine ligningen (10.92) på både højre og venstre side af (10.103)fås at:
AmBCut = ABmCwt − SCet −CAmd (10.104)hvilket giver (10.99). 2

344 10.5 Generel Stokastisk Polpla eringBemærk, hvorledes systemets nulpunkter, d.v.s. B-polynomiet påvirker lukket sløjfeegenska-berne for overføringsfunktionerne til styresignalet men ikke til udgangssignalet. Hvis mananvender denne regulatortype overfor et system med et ikke veldæmpet nulpunkt, vil styre-signalet være kraftigt os illerende (hvilket også vil være tilfældet for udgangssignalet mellemsamplingtidspunkterne).Den stokastiske PZ-regulator kan sammenlignes med en deterministisk PZ-regulator (der harfuld nulpunktsplombering) og et observerpolynomium lig C-polynomiet. Bemærk ved dennesammenligning, at når vi angiver systemet på ARMAX-form (10.7) vil alle tre polynomier(dvs. A, B, og C) generelt indeholde faktorer fra både den deterministiske og den stokastiskedel af systembeskrivelsen. Man skal derfor være agtpågivende overfor reelle forskelle selvomder eksisterer et besnærende slægtskab mellem de formelle udtryk.10.5 Generel Stokastisk Polpla eringSom tidligere nævnt kan en stokastisk PZ-regulator ikke anvendes til regulering af et ikkeminimumfase system, fordi den plomberer systemets nulpunkter. Denne observation kananvendes til design af regulatorer, der kan anvendes i forbindelse med ikkeminimumfasesystemer. Vi må blot a eptere de nulpunkter der er beliggende udenfor stabilitetsområdet ogfølgelig bibeholde dem i overføringerne. Denne regulatortype betegnes her som den generellestokastiske polpla eringsregulator eller blot GSP-regulatoren.Målet med reguleringen er, at udgangen, yt, følger en modeludgang, ym(t):ym(t) = q
−kBm
Am
wt (10.105)så tæt som muligt. Dette er i en stokastisk sammenhæng relateret til (men ikke identiskmed) at minimere kriteriet:Jt = E
˘
(Amyt+k −Bmwt)2¯ (10.106)som tilfældet var i forbindelse med PZ-reguleringen. Imidlertid kan vi ikke her antage at
B-polynomiet ikke har nulpunkter udenfor stabilitetsområdet. Det antages i det følgende afsystemets B-polynomium kan opspaltes efterB = B+B− (10.107)hvor B+ indeholder de nulpunkter, der anses for at være tilstrækkeligt dæmpede til at dekan plomberes. Bemærk, at denne opspaltning involverer et valg (en designbeslutning). Desystemnulpunkter, der ikke ønskes (eller kan) plomberes må nødvendigvis være at gennde ilukketsløjfe overføringsfunktionen fra referen esignalet, wt til udgangen, yt. Derfor må denønskede lukketsløjfe afspejle dette. Dvs. der må gælde at:Bm = B−Bm1 (10.108)hvor Bm1 indeholder evt. yderligere nulpunkter i den ønskede lukketsløjfeoverføringsfunk-tion. Dimensioneringen af den stokastiske (generelle) polpla eringsregulator er samlet i ne-denstående sætning.

345Sætning: 10.8 Antag, at systemet er givet (10.7). Den stokastiske polpla eringsregulator(GSP) er givet ved:B+Gut = Bm1Aowt − Syt − G
B−d (10.109)hvor polynomierne, G og S, er løsninger til diophantine-ligningen:
AoAm = AG+ q−kB−S (10.110)Her er G(0) = 1, ord(G) = k + nb− − 1 og
ord(S) = max(na − 1, nao + nam − k − nb−) (10.111)Observerpolynomiet Ao er et stabilt polynomium (dvs. Ao = znaoAo(z−1)) der kun har nul-punkter indenfor stabilitetsområdet). 2Bemærk, at ofte vælges Ao = C.Bemærk, at regulatoren (for Ao = C) har PZ-regulatoren som spe ialtilfælde, nemlig for f.eks. for:
B− = 1 B+ = B (10.112)(Valget, B− = konst, giver også PZ-regulatoren). Modsat, hvis vi vælger:B+ = 1 B− = B (10.113)plomberes ingen af systemets nulpunkter.Bevis: En ekstern regulator kan jvf. (2.79) generelt skrives på formen:Rut = Qwt − Syt + γ (10.114)og overføringsfunktionen fra referen en til udgangen kan bestemmes til:
Hy,w = q−k QB
AR+ q−kBS(10.115)der i følge designkriteriet skal være lig:
q−kBm1B−
Am
(10.116)De ekstra nulpunkter, som vi ønsker i den lukkede sløjfe må introdu eres via fremkoblingen,dvs. at Q = Bm1Ao, hvor Ao er et stabilt polynomium. Da nu ikke hele B, men kun B+ kanplomberes, må der gælde at:R = B+G (10.117)hvor G er er af passende orden. For at opnå korrekt overføringsfunktion (dvs. for at Hy,w ergivet ved (10.116)) skal polynomierne G og S opfylde diophantineligningen:
AoAm = AG+ q−kB−S (10.118)
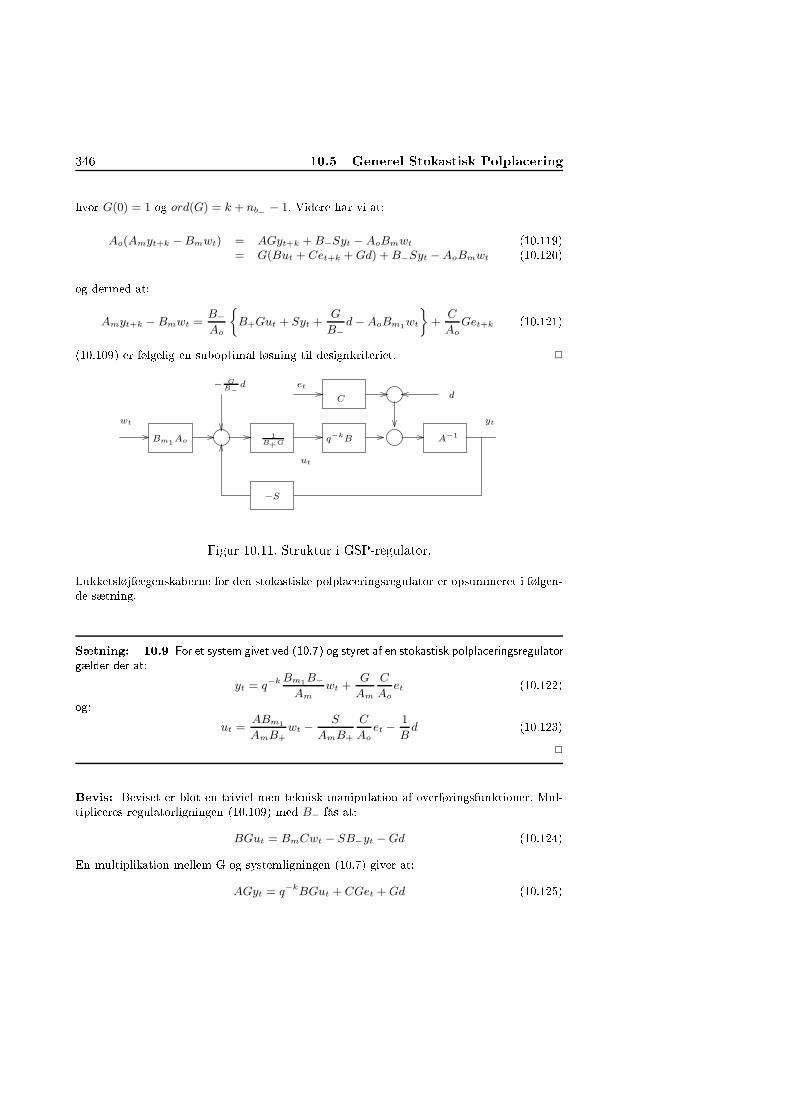
346 10.5 Generel Stokastisk Polpla eringhvor G(0) = 1 og ord(G) = k + nb− − 1. Videre har vi at:Ao(Amyt+k −Bmwt) = AGyt+k +B−Syt − AoBmwt (10.119)
= G(But + Cet+k +Gd) +B−Syt −AoBmwt (10.120)og dermed at:Amyt+k −Bmwt =
B−Ao
B+Gut + Syt +G
B−d− AoBm1wt
ff
+C
Ao
Get+k (10.121)(10.109) er følgelig en suboptimal løsning til designkriteriet. 2
q−kB
wt
1B+G
ut
−S
dC
yt
et− GB−
d
A−1Bm1Ao
Figur 10.11. Struktur i GSP-regulator.Lukketsløjfeegenskaberne for den stokastiske polpla eringsregulator er opsummeret i følgen-de sætning.Sætning: 10.9 For et system givet ved (10.7) og styret af en stokastisk polpla eringsregulatorgælder der at:yt = q
−kBm1B−Am
wt +G
Am
C
Ao
et (10.122)og:ut =
ABm1
AmB+wt − S
AmB+
C
Ao
et − 1
Bd (10.123)
2Bevis: Beviset er blot en triviel men teknisk manipulation af overføringsfunktioner. Mul-tipli eres regulatorligningen (10.109) med B− fås at:BGut = BmCwt − SB−yt −Gd (10.124)En multiplikation mellem G og systemligningen (10.7) giver at:AGyt = q
−kBGut + CGet +Gd (10.125)

347eller med indsættelse af (10.124) at:AGyt = q
−k[BmCwt − SB−yt −Gd] +CGet +Gd (10.126)Videre regninger (dvs. en samling af koe ienterne til yt på venstre side) giver at:[AG+ q
−kB−S]yt = q
−kBmCwt + CGet (10.127)og dermed med anvendelse af (10.110) at:
Amyt = q−kBmwt +G
C
Ao
et (10.128)hvilket er identisk med (10.122). Hvis vi multipli erer regulatorligningen (10.109) med Amfår vi at:B+GAmut = Bm1CAmwt − SAmyt − GAm
B−d (10.129)der med indsættelse af udtrykket for Amyt, dvs. (10.128) giver at:
B+GAmut + Bm1CAmwt − S[q−kBmwt +G
C
Ao
et] − GAm
B−d (10.130)
= Bm1AGwt − SGC
Ao
et − GAm
B−d (10.131)hvor diophantineligningen (10.110) er anvendt. Hermed fremkommer (10.123). 2Bemærk, at Bm1 anvendes til at sikre at overføringsfunktionen fra referen e til udgang haren DC-forstærkning på 1.10.6 Generaliseret Minimalvarians ReguleringVi har i det tidligere beskæftiget os med minering af kriterier af typen:
J = E[yt+k − wt]2 (10.132)Dette førte til MV0-regulatoren. Denne regulator er kendt for at kræve en stor styreeekt,idet den minimerer variansen af udgangens afvigelse fra referen esignalet. Det er imidlertidikke altid tilfældet at fejlens frekvensindhold er lige alvorligt over hele frekvensområdet. Deter i sådanne tilfælde mere relevant at minimere en ltreret version af fejlen. Tilsvarendekan det være fordelagtigt at inkludere en ltreret version af styresignalet i kriteriefunk-tionen for at neddrosle styreeekten i visse frekvensområder. Vi kan med andre ord væreinteresseret i at indføre en frekvensvægtning. Den generaliserede minimalvariansregulator erdimensioneret således at kriteriet:
J = E˘
[yt+k − wt]2 + ρu
2t
¯ (10.133)er minimalt. Her er:yt = Hy(q)yt wt = Hw(q)wt ut = Hu(q)ut (10.134)

348 10.6 Generaliseret Minimalvarians Reguleringltrerede eller frekvensvægtet signaler og Hy(q), Hu(q) og Hw(q) er overføringer, dvs. ra-tionale funktioner i q. For at indføre ere frihedsgrader er der i kriteriet indført to ltre,Hy(q) og Hw(q), således, det der minimeres er forskellen mellem to ltrerede versioner afudgangssignal og referen esignal. Bemærk, at når Hy(q) og Hw(q) er identiske, da er detnetop en ltreret udgave af fejlen der minimeres. Overføringen Hu(q) sikre at styreeektenkan begrænses i bestemte frekvensområder. Lad i det følgende:
Hy(q) =By(q−1)
Ay(q−1)Hu(q) =
Bu(q−1)
Au(q−1)Hw(q) =
Bw(q−1)
Aw(q−1)(10.135)hvor Ay(0) = Au(0) = Aw(0) = Bu(0) = 1 (vægten på styreindgreb er implementeret via
ρ). Det antages som i det tidligere at systemet kan beskrives ved (10.7).Sætning: 10.10 Antag, at systemet er beskrevet ved (10.7). Den generaliserede minimalva-riansregulator (GMV) er da givet ved:[AuBG+ αCBu]ut = Au
»
CBw
Aw
wt − S
Ay
yt −Gd
– (10.136)hvorα =
ρ
b0(10.137)Polynomierne, G og S, er løsninger til diophantineligningen:
ByC = AyAG+ q−kS (10.138)med:
ord(S) = max(na + nay − 1, nby + nc − k) ord(G) = k − 1 (10.139)hvor G ikke nødvedigvis er moniskr. Mere præ ist er G(0) = By(0). 2Bevis: Vi har indledningsvis at:J⋆ = min
ut
E˘
[yt+k − wt]2 + ρu
2t
¯ (10.140)= E
»
minut
E˘
[yt+k − wt]2 + ρu
2t
˛
˛ Yt
¯
– (10.141)idet minimeringen netop foregår under den restriktionen at ut er en funktion af tilgængeliginformation, d.v.s. af Yt. Styreindgrebet er da givet ved:ut = arg min
ut
»
“
ˆyt+k|t − wt
”2
+ ρu2t
– (10.142)Til bestemmelse af ˆyt+k|t har vi (10.138) der anvendt sammen med systembeskrivelsen (10.7)giver at:ByCyt+k = GBy [But +Cet+k + d] + Syt (10.143)

349eller at:yt+k =
1
C
»
BGut +S
By
yt +Gd
–
+Get+k (10.144)Heraf ses atdyt+k
dut
= b0 (10.145)Styreindgrebet kan bestemmes af:b0(ˆyt+k|t − wt) + ρut = 0 (10.146)Dermed skal styreindgrebet bestemmes således at:
»
BGut +S
By
yt − Cwt + αCut +Gd
–
= 0 (10.147)eller som givet i (10.136). 2Det bemærkes, at hvis vi denerer et signal,ζt = yt + q
−k [αut − wt] (10.148)da svarer reguleringen til at nulstille k−trins prædiktionen af ζt, dvs.:ζt+k = ˆyt+k − wt + αut = 0 (10.149)Lad os indføre polynomiet R ved:
R = AuBG+ αCBu (10.150)hvor vi kort kan skrive reguleringen somRut = C
»
AuBw
Aw
wt
–
− S
»
Au
Ay
yt
–
− AuGd (10.151)Her er de i [...] indgående signaler systemuafhængige, dvs. kun afhænger af reguleringskrite-riet. Bemærk, at vi for ζt, der er deneret ud fra (10.148) efter at have introdu eret (10.144)kan skrive at:ζt+k =
1
C
„
R
»
1
Au
ut
–
+ S
»
1
Ay
yt
–
− C
»
Bw
Aw
wt
–
−Gd
« (10.152)+Get+k (10.153)
= ζt+k|t +Get+k (10.154)Vi betegner ζt som den generaliserede fejl. Det bemærkes at GMV-reguleringen kan opfattessom en basal minimalvarians regulering af et udvidet system med udgangen ζt og at der(under stationære forhold) gælder at:ζt = Get (10.155)Ved indkobling af GMV - regulatoren vil den generaliserede fejl, ζt, have et indsvingningsforløb mod den stationære fejl, Get, der er bestemt af nulpunkterne i C-polynomiet. Ligning

350 10.6 Generaliseret Minimalvarians ReguleringA−1
ut
et
C
q−kB
d
wt
q−kHw
Hy
q−kHu
ξt
Figur 10.12. GMV-regulering kan opfattes som en minimalvariansregulering af ξt.(10.154) er interessant i en adaptiv sammenhæng, fordi parametre i regulatoren indgår i enlineær sammenhæng med kendte signaler (eller signaler der kan genereres ud fra et kendskabtil kriteriet alene).Det er muligt at opfatte GMV-regulatoren som bestående af en indre regulator samt treforltre. Man kan med andre ord sige at regulatoren er pakket ind i forltre, der alene erbestemt af overføringsfunktioner fra kriteriet.A−1
y
Hw C
−Gd
−S
Au
et
q−kB
C d
ytutwt Forltre Indre Regulator System A−1R−1
Figur 10.13. GMV-regulator og systemDet er muligt at analysere lukketsløjfe systemet og at angive de interessante overførings-funktioner. Spe ielt med hensyn til senere referen e samler vi disse overføringer i følgendesætning.Sætning: 10.11 Den lukkede sløjfe bestående af systemet i (10.7) og GMV-regulatoren,(10.136) er beskrevet af:[BAuBy + αABuAy] yt = q
−kBw
Aw
BAuAywt + RAyet + δy (10.156)[BAuBy + αABuAy] ut =
Bw
Aw
AAuAywt + SAuet + δu (10.157)i stationaritet. DC-komposanterne, δy og δu, er givet ved:δy = αBuAyd δu = −AuByd (10.158)

3512Bevis: Beviset består blot af tekniske manipulationer af overføringsfunktioner. Generaltgælder at styres systemet i (10.7) af en regulator
Rut =Q
Pwt − S
Lyt + γ (10.159)er den lukkede sløjfe givet ved
Cyt = q−k LBQ
Pwt + LRCet + L (Bγ + Rd) (10.160)
Cut =LAQ
Pwt − SCet + (ALγ − Sd) (10.161)hvor det karakteristiske polynomium er
C = LAR + q−k
SB (10.162)Resten af sætningen fremkommer ved simpel indsættelse i ovenstående af R fra (10.150)samt af:Q = AuCBw P = Aw (10.163)
S = SAu L = Ay γ = −AuGd (10.164)F.eks. gælder at:C = LAR + q
−kSB (10.165)
= AyA (AuBG+ αCBu) + q−kSAuB (10.166)
= BAu
“
AyAG+ q−kS”
+ AyAαCBu (10.167)= BAuByC + AyAαCBu (10.168)= C (BAuBy + αABuAy) (10.169)
2Bemærkning: 10.6 Bemærk, at hvis ρ = 0 da vil systemnulpunkter blive plomberet, hvil-ket medfører at disse skal være rimeligt dæmpet for at få en tilfredsstillende regulering. Afovenstående overføringer ses bl. a. at Bu skal have et nulpunkt i 1 for at undgå stationærefejl hidrørende fra referen esignal og belastning. 2Bemærkning: 10.7 Man kan i visse tilfælde udnytte et alternativt udtryk for det karak-terisktiske polynomie, idet[BAuBy + αABuAy] = AyAu
“
BHy + αAHu
”
2Denne meget generalle regulator indeholder naturligvis en række spe ialtilfælde. Ved atbetragte kriteriet kan man let overbevise sig om følgende sammenhæng mellem GMV og detidligere beskrevne regulatorer er gældende for Ay = Aw = Au = 1.

352 10.6 Generaliseret Minimalvarians ReguleringType By Bw ρ
MV0 1 1 0PZ Am Bm 0Ud over disse to kendte typer indeholder GMV-regulatoren yderligere nogle interessantespe ialtilfælde, som vi gennemgår i det følgende.10.6.1 MV1-Regulering
MV1−regulatoren fremkommer hvis i frekvensvægter styresignalet i kriteriefunktionen såle-des at styringen minimererJ = E
˘
(yt+k − wt)2 + ρ (ut − ut−1)
2¯ (10.170)Dvs. at:Hy = 1 Hw = 1 Hu =
“
1 − q−1” (10.171)I forhold til MV0-regulatoren, er der indført et tab, som er relateret til styreeekten. Detbemærkes, at det er de højere frekvenser i styresignalet, der vægtes i tabsfunktionen, idet
Hu er et højpas lter. Denne regulator er jvf. sætning 10.138 givet ved:[BG+ αC(1 − q
−1)]ut = Cwt − Syt −Gd (10.172)hvor G og S polynomierne er løsningen til:C = AG+ q
−kS (10.173)hvor G(0) = 1, ord(G) = k − 1 og ord(S) = max(na − 1, nc − k). Forskellen i forholdtilMV0-regulatoren består blot at R-polynomiet er udvidet fra BG til BG+ α(1 − q−1)C.Som det fremgår af nedenstående overføringsfunktioner åbner dette en mulighed for at re-gulere ikke minimumfase systemer.
yt = q−k B
B + α(1 − q−1)Awt +
BG+ α(1 − q−1)C
B + α(1 − q−1)Aet (10.174)
ut =A
B + α(1 − q−1)Awt − S
B + α(1 − q−1)Aet − 1
Bd (10.175)Det bemærkes, at hvis α varieres fra 0 til ∞ da vil lukketsløjfe polerne bevæges fra system-nulpunkterne til systemets poler samt 1. Dette kan være et problem hvis systemet har polerudenfor stabilitetsområdet.10.6.2 MV3-ReguleringDenne regulatortype kan med rette også betegnes som en modelfølger, idet den kan konstrue-res til i den lukkede sløjfe at have en bestemt overføringsfunktion fra referen en til udgangen.
353Samtidig kan lukkede sløjfe have (en anden bestemt) overføringsfunktion fra støjsignalet tiludgangen. Lad overføringsfunktionerne i kriteriefunktionen være givet ved:Hy =
Ae
Be
Hw =AeBm
BeAm
Hu = 1 ρ = 0 (10.176)hvor betydningen af de enkelte polynomier, der alle har nulpunkter klart indenfor enheds- irklen, vil fremgå af det efterfølgende. Bemærk, at når Hu = 0 vil systemets nulpunktermed denne regulatortype blive plomberet.MV2-regulatoren er derfor ikke anvendelig overforikke minimumfase systemer. Ved hjælp af sætning 10.11 kan vi udregne de for os interessanteoverføringer.yt = q
−kBm
Am
wt +Be
Ae
Get (10.177)ut =
ABm
BAm
wt − SBe
BAe
et − 1
Bd (10.178)Som det fremgår af overføringsfunktionerne til udgangen, har vi med denne regulatortypefrihed til at indrette regulatorer med henblik på at have en overføring for referen esignaletog en for støjsignalet. Bemærk, at dette er i modsætning til PZ - regulering hvor vi harsamme lukketsløjfepoler i overføringerne (fra referen e og støj) til udgangen.10.7 GPC-reguleringGPC-regulering er behandlet i forbindelse med intern systembeskrivelse i afsnit 9.3. Lad osnu betragte en styring, der etablerer en minimering af kriteriet:
Jt = E
(
NX
τ=t
(yτ −wτ )⊤O(yτ −wτ ) + u⊤τ Q2uτ
) (10.179)for et system givet på ARMAX formen [side 328 (10.7). Vægtene O og Q2 kan megetvel være tidsvarierende (og spe ielt til visse tidspunkter være nul). Dette kriterium kan,som i forbindelse med tilstandsbeskrivelser (intern beskrivelse), let omskrives til (det meregenerelle) kriterium:Jt = E
n
(Yt:N −Wt:N)⊤Qy(Yt:N −Wt:N) + U⊤QuU
o (10.180)hvor bl.a.Yt:N =
2
6
4
yt...yN
3
7
5Wt:N =
2
6
4
wt...wN
3
7
5(10.181)Vi kan ved anvendelse af sætning 8.4 [side 284 beregne at:
yt+i =1
C(q−1)
`
B(q−1)Gi(q−1)ut+i−k + Si(q
−1)yt
´ (10.182)+Gi(q
−1)et+i i = 1, ..., N − t (10.183)
354 10.7 GPC-reguleringhvor Gi og Si er løsninger til:C(q−1) = A(q−1)Gi(q
−1) + q−iSi(q
−1) (10.184)Gi(0) = 1 ord(Gi) = i− 1 ord(Si) = Maxna − 1, nc − i) (10.185)Bemærk, at koe ienterne i Gi er impulsresponsen for overføringen fra et til yt, dvs.
Gi(q−1) =
»
C(q−1)
A(q−1)
–
i+1
= h0 + h1q−1 + ...+ hiq
−i (10.186)hvor [...]i+1 angiver en trunkering. Det er evident at styreindgrebene ut, ut+1, ... ikke kanpåvirke yt+i for i < k. Vi er derfor (i stor analogi med sætning 8.4 [side 284) interesseret iat opsplitte størrelsen:B(q−1)Gi(q
−1)
C(q−1)ut+i−k (10.187)i bidrag fra tidligere styreindgreb og bidrag fra aktuelle styreindgreb. Bemærk, at i sætning8.4 [side 284 sker opsplitningen i bidrag fra fremtidige styreindgreb og bidrag fra tidligereog nuværende styreindgreb. Vi kan ved anvendelse af diophantineligningen opskrive at:
yt+i =1
C(q−1)
`
Ri(q−1)ut + Si(q
−1)yt
´ (10.188)+Gi(q
−1)ut+i−k +Gi(q−1)et+i i = k, ..., N − t (10.189)hvor:
B(q−1)Gi(q−1) = C(q−1)Gi(q
−1) + qk−i−1Ri(q
−1 (10.190)ord(Gi) = i− k − 1 ord(Ri) = Maxnc − 1, nb + k − 1 (10.191)Bemærk, at koe ienterne i Gi er impulsresponsen for overføringen fra ut til yt, dvs.Gi(q
−1) =
»
q−kB(q−1)
A(q−1)
–
i+1
= h0 + h1q−1 + ...+ hiq
−i (10.192)hvor [...]i+1 angiver en trunkering. For k > 0 vil hi = 0 for i ≤ k. Hermed er vi i stand tilat opskrive:Yt:N = Yt + ΠN−tUt:N + ΠN−te (10.193)hvor Yt indeholder det frie respons (dvs. for Ut:N = 0), dvs.:
Yt =
2
6
6
4
...y0
t+i... 3
7
7
5
y0t+i =
Ri(q−1)
C(q−1)ut−1 +
Si(q−1)
C(q−1)yt (10.194)Der eksisterer ere måder hvorpå bestemmelsen af det (prædikterede) frie respons kan im-plementeres. Størrelserne Π og Π er givet i [side 237 (6.83)-(6.84) (samt i [side 304 (9.120)).Spe ielt er
Πτ =
8
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
:
h0 0 0 0 ... 0h1 h0 0 0 ... 0h2 h1 h0 0 ... 0h3 h2 h1 h0 ... 0... ... ... ... . . . ...hτ hτ−1 hτ−2 hτ−3 ... h0
9
>
>
>
>
>
>
>
=
>
>
>
>
>
>
>
;
(10.195)

355Vi har da følgende sætning.Sætning: 10.12 Antag, at et dynamisk system er givet ved beskrivelsen [side 328 (10.7)eller [side 328 (10.8). Styrestrategien, der på basis af Yt minimerer (10.180) er givet ved:Ut:N =
h
Π⊤QyΠ +Qu
i−1
ΠQy(W − Yt) (10.196)hvor Π = ΠN−t og hvor W = Wt:N og Yt er minimalvarians prædiktionen af referen eudviklingenog det frie respons henholdsvis. 2Bemærkning: 10.8 Sætningen er udledt ud fra et ARMAX system. Sætningen er imid-lertid også gyldig for et system givet på (den generelle) L-struktur, når blot hi i [side 354(10.195) er koe ienter i impulsresponsen for overføringen fra ut til yt. 210.8 LQG - ReguleringDen stokastiske polpla eringsregulator er indført som en ad ho måde at håndtere ikke-minimumfase systemer. Der eksisterer naturligvis en optimal løsning på ikkeminimumfaseproblemet. Problemet i forbindelse med minimalvarians regulatorerne og ikkeminimumfase-systemerne er, at man kun fokuserer på kvadratet af udgangen uden hensyntagen til styre-eekten. Hvis vi i kriteriet indfører et bidrag fra styreeekten, d.v.s.:Jt = lim
N→∞E
(
1
N
NX
i=t
y2i + ρu
2i
) (10.197)vil vi minimere udgangens varians under hensyntagen til styreeekten. Pga. regulatoren evnetil at håndtere ikke minimumfasesystemer vil vi ikke her ekspli it udtrække tidsforsinkelseni systembeskrivelsen. Vi antager med andre ord at systemet er givet på samme form som i(10.1).Sætning: 10.13 Antag, at systemet er givet ved (10.1). Da er LQG-regulatoren (der mini-merer (10.197)) givet ved:Rut = −Syt (10.198)hvor polynomierne R og S er løsning til diophantine ligningen:
PC = AR+ BS (10.199)med:ord(R) = nb − 1 (10.200)Polynomiet P er den løsning til:
P (q−1)P (q) = B(q−1)B(q) + ρA(q−1)A(q) (10.201)der ikke har nulpunkter udenfor enheds irklen. 2
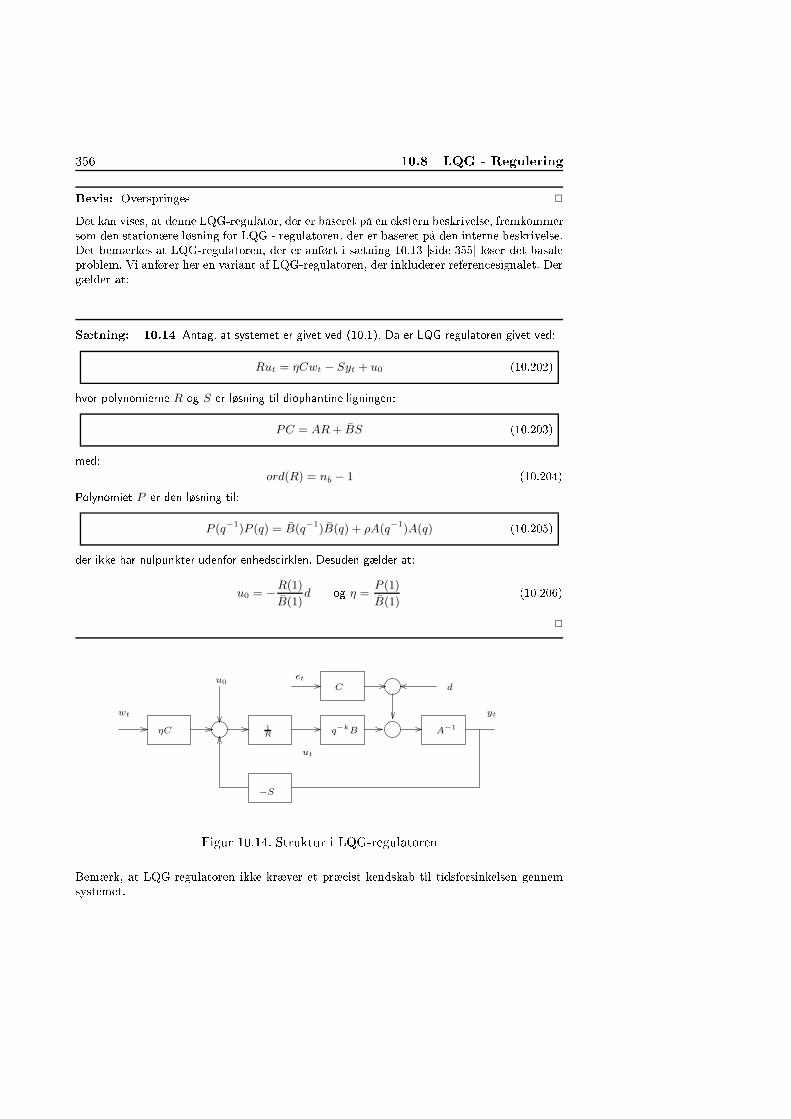
356 10.8 LQG - ReguleringBevis: Overspringes 2Det kan vises, at denne LQG-regulator, der er baseret på en ekstern beskrivelse, fremkommersom den stationære løsning for LQG - regulatoren, der er baseret på den interne beskrivelse.Det bemærkes at LQG-regulatoren, der er anført i sætning 10.13 [side 355 løser det basaleproblem. Vi anfører her en variant af LQG-regulatoren, der inkluderer referen esignalet. Dergælder at:Sætning: 10.14 Antag, at systemet er givet ved (10.1). Da er LQG-regulatoren givet ved:Rut = ηCwt − Syt + u0 (10.202)hvor polynomierne R og S er løsning til diophantine ligningen:
PC = AR+ BS (10.203)med:ord(R) = nb − 1 (10.204)Polynomiet P er den løsning til:
P (q−1)P (q) = B(q−1)B(q) + ρA(q−1)A(q) (10.205)der ikke har nulpunkter udenfor enheds irklen. Desuden gælder at:u0 = −R(1)
B(1)d og η =
P (1)
B(1)(10.206)
2
A−1
wt
ηC
u0
1R
ut
et
C
q−kB
d
yt
−SFigur 10.14. Struktur i LQG-regulatorenBemærk, at LQG-regulatoren ikke kræver et præ ist kendskab til tidsforsinkelsen gennemsystemet.
10.8.1 Spe ialtilfælde af LQG-regulering 357For den lukkede sløjfe gælder:Sætning: 10.15 Antag at systemet (10.7) er styret af en LQG-regulator. Da gælder for denlukkede sløjfe at:Pyt = ηBwt +Ret (10.207)og
Put = ηAwt − Set − P (1)
B(1)d (10.208)i stationaritet. 2Bevis: Der anvendes samme teknik som tidligere. Ved at multipli ere systemligning [side328 (10.7) (og (10.5)) med R og regulatorligning (10.202) med B får vi henholdsvis at:
ARyt = BRut + CRet +Rd (10.209)og at:BRut = ηBCwt − BSyt + Bu0 (10.210)Ved at indsætte (10.210) i (10.209) har vi at:
ARyt = ηBCwt − BSyt + Bu0 +CRet +Rd (10.211)eller idet vi anvender diophantineligningen (10.203) at:PCyt = ηBCwt +RCet (10.212)Hermed fremkommer overføringerne (10.207) til udgangen. For styresignalet gælder (jvf.(10.202) og (10.207)) at:
Rut = ηCwt − S
»
ηB
Pwt +
R
Pet
–
+ u0 (10.213)= η
»
PC − BS
P
–
wt − SR
Pet + u0 (10.214)
= ηAR
Pwt − SR
Pet + u0 (10.215)eller (10.208). 2Bemærk, at lukketsløjfe polerne er nulpunkter til P-polynomiet og η sikrer at DC-forstærkningen(fra wt til yt) i den lukkede sløjfe er 1.10.8.1 Spe ialtilfælde af LQG-reguleringHvis ρ = 0 og hvis systemet er minimumfase, da er denne regulator identisk med MV0-regulatoren. For dette spe ialtilfælde gælder der nemlig, at P-polynomiet, der er den stabileløsning til:
P (z−1)P (z) = B(z−1)B(z) = B(z−1)B(z) (10.216)

358 10.9 Oversigter lig B-polynomiet. Dermed bliver diophantineligningen:BC = AR+ BS (10.217)Da nu B = q−kB skal R = BG, hvor G har ordenen k − 1. Hermed skal G og S væreløsninger til:C = AG+ q
−kS (10.218)hvilket er identisk med diophantineligningen, (10.62) forMV0-regulatoren. Endvidere gælderfor dette spe ialtilfælde at:
η =P (1)
B(1)= 1 u0 = −R(1)
B(1)d = −G(1)d (10.219)Selve LQG-regulatoren er nu givet ved:
BGut = Cwt − Syt −Gd (10.220)hvilket er identisk med MV0-regulatoren (10.61).For det tilfælde at B har nulpunkter udenfor enheds irklen, vil P-polynomiet indeholdesystemets nulpunkter indenfor enheds irklen samt en spejlet udgave af de systemnulpunkter,der er pla eret udenfor enheds irklen. En spejling betyder i denne sammenhæng at z−1 eren spejlet udgave af z.10.9 OversigtDette kapitel afsluttes med en oversigt over de regulatorer, der kan opfattes som en udvidelseaf den basale minimalvariansregulator.Polpla eringI designet af en stokastisk polpla eringsregulator indgår der ligesom i det deterministisketilfælde en faktorisering af systembeskrivelsens B-polynomium, d.v.s. B = B−B+. Klassenaf polpla eringsregulatorer kan derfor opdeles i tre underklasser, nemlig i:• en klasse af regulatorer hvori der ikke plomberes nogle nulpunkter overhovedet, d.v.s.hvor B+ = 1, B− = B.• en klasse af regulatorer, hvori alle systemets nulpunkter plomberes, d.v.s. B+ =B,B− = 1.
• en mellemklasse, der dækker alle typer imellem de to ovennævnte yderpunkter.Dette kan afbildes grask i gur 10.15.Det bemærkes at et spe ialtilfælde under fuld nulpunktsplombering udgøres afMV0-regulatoren.
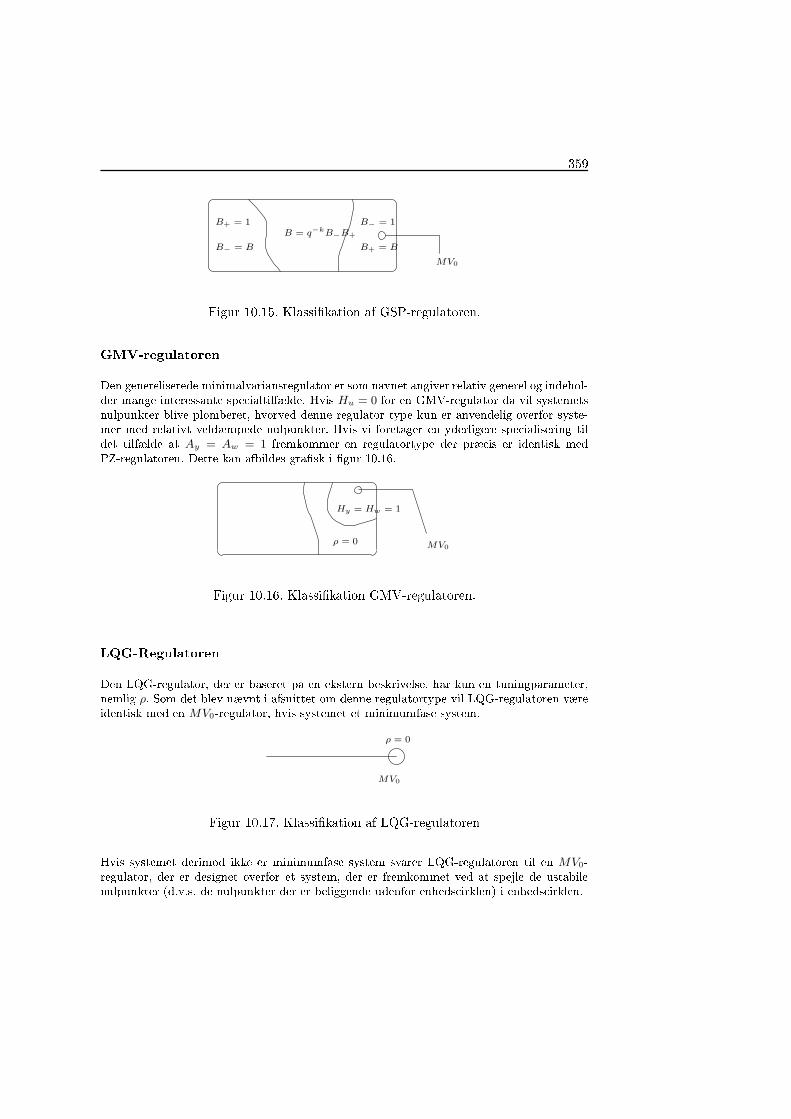
359B = q−kB−B+
MV0
B− = 1
B+ = B
B+ = 1
B− = BFigur 10.15. Klassikation af GSP-regulatoren.GMV-regulatorenDen genereliserede minimalvariansregulator er som navnet angiver relativ generel og indehol-der mange interessante spe ialtilfælde. Hvis Hu = 0 for en GMV-regulator da vil systemetsnulpunkter blive plomberet, hvorved denne regulator type kun er anvendelig overfor syste-mer med relativt veldæmpede nulpunkter. Hvis vi foretager en yderligere spe ialisering tildet tilfælde at Ay = Aw = 1 fremkommer en regulatortype der præ is er identisk medPZ-regulatoren. Dette kan afbildes grask i gur 10.16.MV0
ρ = 0
Hy = Hw = 1
Figur 10.16. Klassikation GMV-regulatoren.LQG-RegulatorenDen LQG-regulator, der er baseret på en ekstern beskrivelse, har kun en tuningparameter,nemlig ρ. Som det blev nævnt i afsnittet om denne regulatortype vil LQG-regulatoren væreidentisk med en MV0-regulator, hvis systemet et minimumfase system.MV0
ρ = 0
Figur 10.17. Klassikation af LQG-regulatorenHvis systemet derimod ikke er minimumfase system svarer LQG-regulatoren til en MV0-regulator, der er designet overfor et system, der er fremkommet ved at spejle de ustabilenulpunkter (d.v.s. de nulpunkter der er beliggende udenfor enheds irklen) i enheds irklen.
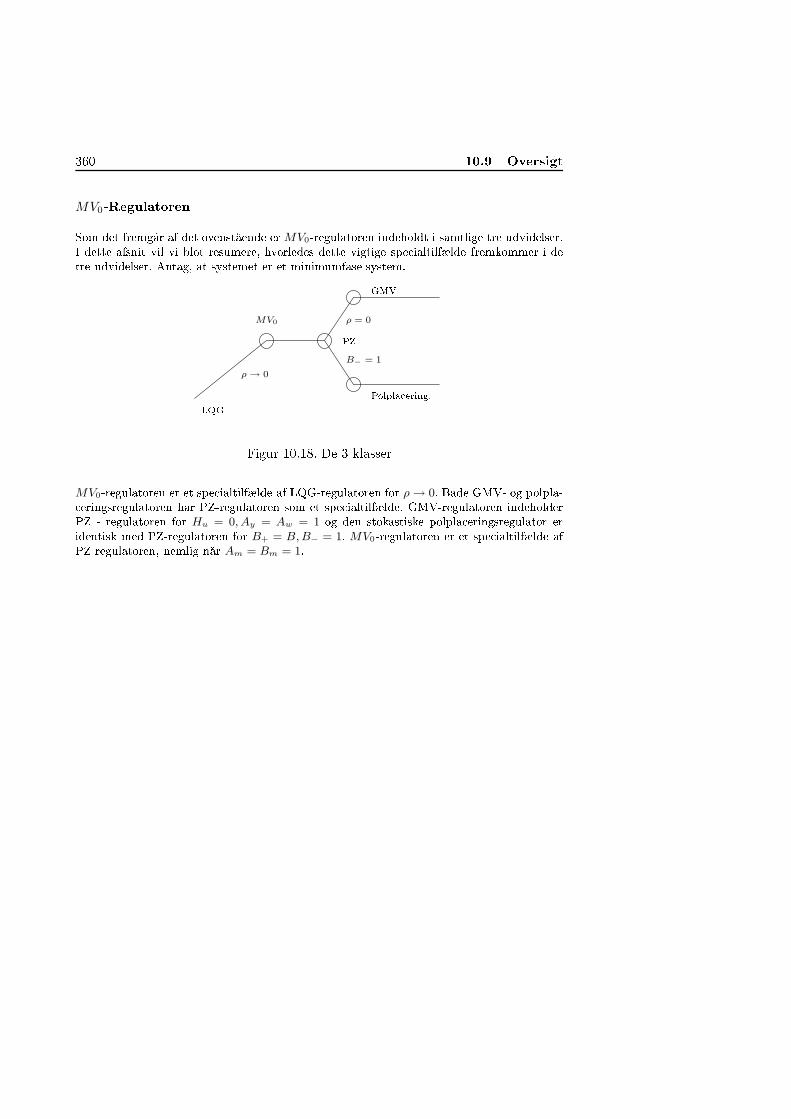
360 10.9 OversigtMV0-RegulatorenSom det fremgår af det ovenstående er MV0-regulatoren indeholdt i samtlige tre udvidelser.I dette afsnit vil vi blot resumere, hvorledes dette vigtige spe ialtilfælde fremkommer i detre udvidelser. Antag, at systemet er et minimumfase system.
LQGρ = 0PZ Polpla ering.
GMVMV0
ρ → 0
B− = 1
Figur 10.18. De 3 klasserMV0-regulatoren er et spe ialtilfælde af LQG-regulatoren for ρ→ 0. Både GMV- og polpla- eringsregulatoren har PZ-regulatoren som et spe ialtilfælde. GMV-regulatoren indeholderPZ - regulatoren for Hu = 0, Ay = Aw = 1 og den stokastiske polpla eringsregulator eridentisk med PZ-regulatoren for B+ = B,B− = 1. MV0-regulatoren er et spe ialtilfælde afPZ-regulatoren, nemlig når Am = Bm = 1.
Del IIIDel 3: System identikation
361

Kapitel 11SystemidentikationI den første del af dette kursus har vi betragtet metoder til regulering og styring af kendtesystemer. Den information om systemet, der er nødvendig, varierer meget. Hvis der anvendesen proportional regulator kræves i prin ippet kun et punkt i Bodediagrammet for systemet.Anvendes der et kalmanlter eller en minimalvariansregulator kræves der en fuld model afsystemet, d.v.s. en fuld model for både overføringen fra styresignalet til udgangen samt enfuld model for de stokastiske forstyrrelsers spektrale egenskaber.En modellering af et givet dynamisk system vil som oftest give en øget indsigt i de mekanis-mer og pro esser, der karakteriserer systemet. Yderligere kan et øget kendskab til systemetsdynamik have en feedba keekt på pro esdesign og på valget af hvilke signaler eller stør-relser, det er fornuftigt at anvende som styre - og målesignaler. Der er altså en interaktionmellem pro esdesign og kontrolteori, hvorved der kan undgås reguleringsproblemer.Den resulterende model indeholder kondenseret information om den aktuelle pro es ellersystem. Denne model kan derfor også anvendes til fejldetektion og kan f. eks. implementeressom en prædiktionsalgoritme, hvor en prædiktion og den faktiske måling sammenholdes medspredningen af prædiktionsfejlen.Modeller anvendes til forskellige formål og kan derfor konstrueres efter forskellige metoderalt afhængig af anvendelsen. En modellering af en given pro es eller system kan derfor beståaf et hierarki af modeller, hver designet til et bestemt formål, istedet for en global model,der anvendes i alle opgaver.Der eksisterer to prin ipielt forskellige måder at modellere et dynamisk system. Den enemetode er den deduktive metode, der er baseret på at anvende basale fysiske, kemiske,et . love. Den derved fremkomne model er meget kompli eret (ofte ulineær), har et bredtanvendelsesområde, og kræver en indgående pro esviden. Denne metode er generelt megetarbejdskrævende og ofte er pro esvidenen så usikker at det er praktisk umuligt at basere enmodellering herpå. Det er endvidere værd at notere, at der generelt med denne metode ikkeopnås en model for de stokastiske forstyrrelser, der påvirker det dynamiske system.363

364En anden fremgangsmåde til bestemmelse af en model for et dynamisk system er at anvendeen, ofte statistisk, metode til at bestemme den dynamiske sammenhæng mellem målte ind-og udgangsignaler (jvf gur 11.1). Systemut yt
vtFigur 11.1. Et Identikations eksperiment.
0 20 40 60 80 100-20
-10
0
10
20Systemudgang
y
t
0 20 40 60 80 100-2
-1
0
1
2Input til system
u
t
En sådan metode betegnes som en identikationsmetode og vi vil i det følgende betragte ereaf dens aspekter. Metoden betegnes også som en induktiv metode. Den derved fremkomnemodel har ofte et begrænset anvendelsesområde, d.v.s. at den kun er gyldig i et områdeomkring det arbejdspunkt, der var anvendt under eksperimentet. Mængden af direkte fysiskindsigt i systemets mekanismer er i de este tilfælde relativt begrænset.Praktisk modellering ligger metodemæssigt imellem de to ovennævnte yderpunkter. Denfysiske indsigt giver modelstrukturen og angiver hvilke approximationer, der er rimelige.Værdierne af parametrene i modelstrukturen bestemmes v.h.a. en identikationsmetode.Identikations- eller modelleringspro essen er ofte iterativ og består af følgende hovedpunk-ter.• 1. Eksperimentplanlægning• 2. Valg af modelstruktur.• 3. Estimation af parametre.• 4. ModelvalideringVi vil her først kon entrere os omkring estimationsfasen af identikationspro essen og der-efter forsøge at inkludere andre elementer af den iterative pro es.
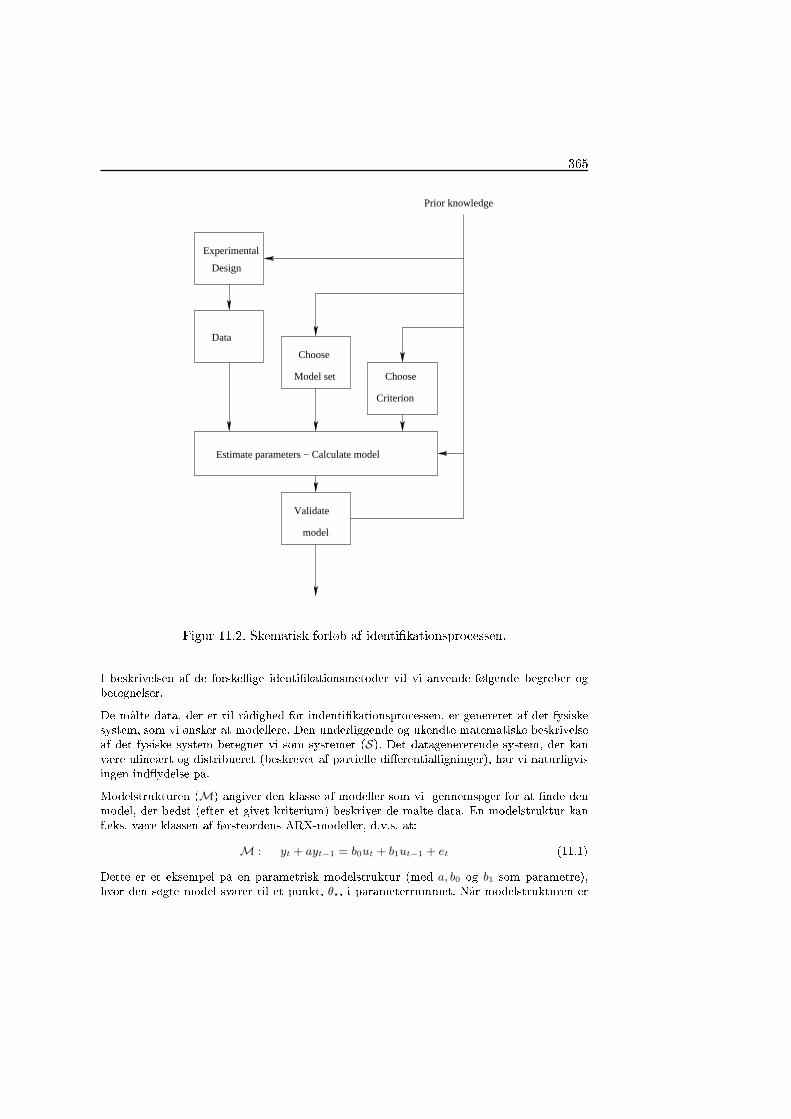
365Experimental
Design
Validate
model
Estimate parameters − Calculate model
Data
Choose
Model set Choose
Criterion
Prior knowledge
Figur 11.2. Skematisk forløb af identikationspro essen.I beskrivelsen af de forskellige identikationsmetoder vil vi anvende følgende begreber ogbetegnelser.De målte data, der er til rådighed for indentikationspro essen, er genereret af det fysiskesystem, som vi ønsker at modellere. Den underliggende og ukendte matematiske beskrivelseaf det fysiske system betegner vi som systemet (S). Det datagenererende system, der kanvære ulineært og distribueret (beskrevet af partielle dierentialligninger), har vi naturligvisingen indydelse på.Modelstrukturen (M) angiver den klasse af modeller som vi gennemsøger for at nde denmodel, der bedst (efter et givet kriterium) beskriver de målte data. En modelstruktur kanf.eks. være klassen af førsteordens ARX-modeller, d.v.s. at:M : yt + ayt−1 = b0ut + b1ut−1 + et (11.1)Dette er et eksempel på en parametrisk modelstruktur (med a, b0 og b1 som parametre),hvor den søgte model svarer til et punkt, θ⋆, i parameterrummet. Når modelstrukturen er

366parametrisk betegner vi dem med M(θ). Vores første opgave i modelleringspro essen er atvælge en passende modelstruktur og dernæst at bestemme (estimere) parametrene i denne.Der eksisterer ere forskellige identikationmetoder (I), f.eks. maximum likelihood ogmindste kvadraters metode. I kan være parametrisk, dvs. at der estimeres en parametervek-tor, θ, i en parametrisk modelstruktur,M(θ),. Både modelstruktur og identikationsmetodeer blandt de valg der indgår i modelleringspro essen.De målte data (D) er opnået under ganske bestemte eksperimentelle betingelser (χ), somf.eks. samplingperiode, eksitationssignaler (indgangssignaler). Til de eksperimentale betin-gelser hører også om hvorvidt systemet er tilbagekoblet, som det f.eks. ofte er tilfældetmed økonomiske og biologiske systemer samt i forbindelse med sikkerhedfølsomme tekniskesystemer.
Kapitel 12Ikke-parametriske metoderI dette afsnit vil vi kort beskrive nogle gængse ikke-parametriske metoder til identika-tion af dynamiske systemer. Standardværkerne indenfor systemidentikation (Eykho 1974),(Ljung 1987), (Söderström & P. Stoi a 1989) giver bl.a. en introduktion til disse metoder.12.1 TransientanalyseEt lineært, tidsinvariant dynamisk system kan karakteriseres ved dets impulsrespons, ht.Impulsresponsmetoder består i at måle systemets respons, når dette påvirkes af en puls. Fordenne metode kan vi umiddelbart se et problem. Fra den indledende systemteori (kapitel1.3) har vi (jvf. 1.167) at:yt = ϕ
T Φtx0 +
tX
s=0
ht−sus
= ϕT Φt
x0 + ht for ut = δtHvis vi måler impulsresponsen direkte kan vi få en ikke ubetydelig påvirkning fra initial-betingelsen, x0, hvis denne er forskellig fra nul. I forbindelse med tidskontinuerte system-beskrivelser eksisterer endnu et problem; nemlig at det ikke er muligt at generere en ideel(tidskontinuert) puls. Det er derfor i forbindelse med tidskontinuerte beskrivelser nødvendigtat tage højde for de indførte approximationer til en puls. Problemet kan sædvanligvis ogsåomgås ved at arbejde med den integrerede impulsrespons, dvs. stepresponsen.Begge metoder er meget simple og kræver meget få beregninger. De er derimod ret følsommeoverfor støj. Er signal-tøjforholdet rimeligt er det muligt at opnå et estimat for de mestbetydende størrelser. Den opnåede information kan i mange tilfælde være tilstrækkelig tilen første tuning af parametrene i en PID regulator, men er ikke tilstrækkelig til design367
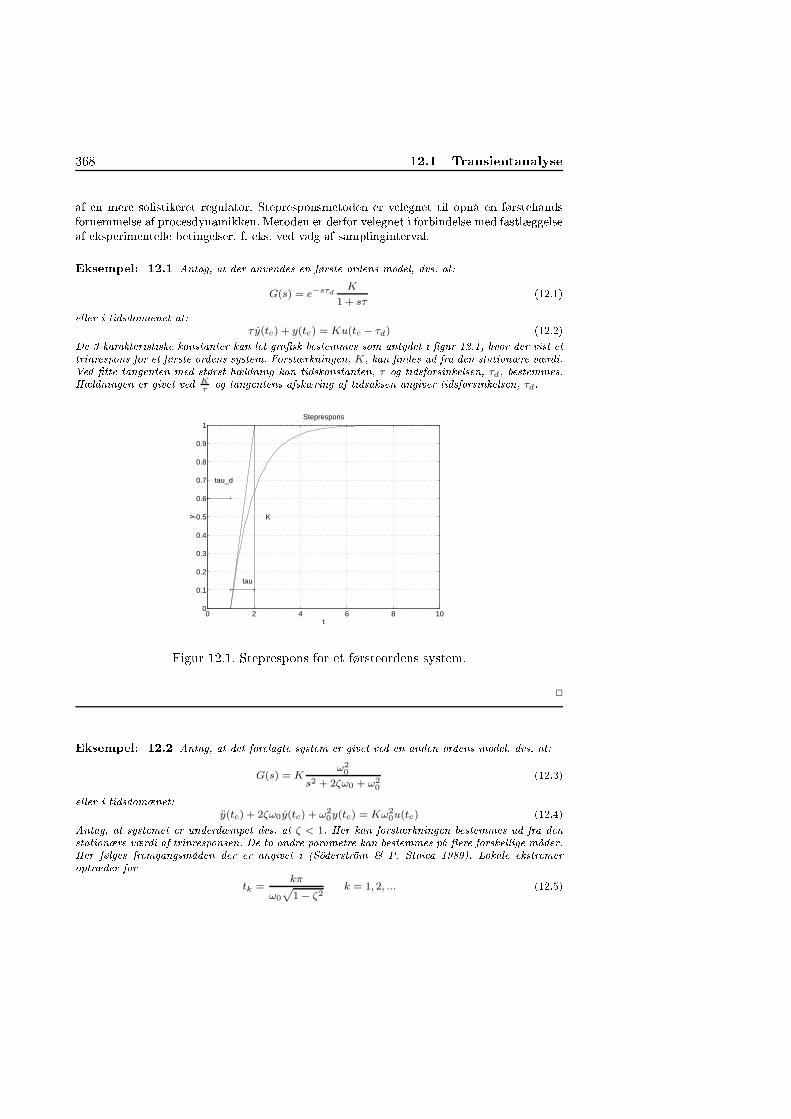
368 12.1 Transientanalyseaf en mere sostikeret regulator. Stepresponsmetoden er velegnet til opnå en førstehåndsfornemmelse af pro esdynamikken. Metoden er derfor velegnet i forbindelse med fastlæggelseaf eksperimentelle betingelser, f. eks. ved valg af samplinginterval.Eksempel: 12.1 Antag, at der anvendes en første ordens model, dvs. at:G(s) = e−sτd
K
1 + sτ(12.1)eller i tidsdomænet at:
τ y(tc) + y(tc) = Ku(tc − τd) (12.2)De 3 karakteristiske konstanter kan let grask bestemmes som antydet i gur 12.1, hvor der vist ettrinrespons for et første ordens system. Forstærkningen, K, kan ndes ud fra den stationære værdi.Ved tte tangenten med størst hældning kan tidskonstanten, τ og tidsforsinkelsen, τd, bestemmes.Hældningen er givet ved Kτ
og tangentens afskæring af tidsaksen angiver tidsforsinkelsen, τd.
0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tau_d
tau
K
Steprespons
y
tFigur 12.1. Steprespons for et førsteordens system.2Eksempel: 12.2 Antag, at det forelagte system er givet ved en anden ordens model, dvs. at:
G(s) = Kω2
0
s2 + 2ζω0 + ω20
(12.3)eller i tidsdomænet:y(tc) + 2ζω0y(tc) + ω2
0y(tc) = Kω20u(tc) (12.4)Antag, at systemet er underdæmpet dvs. at ζ < 1. Her kan forstærkningen bestemmes ud fra denstationære værdi af trinresponsen. De to andre parametre kan bestemmes på ere forskellige måder.Her følges fremgangsmåden der er angivet i (Söderström & P. Stoi a 1989). Lokale ekstremeroptræder for
tk =kπ
ω0
p
1 − ζ2k = 1, 2, ... (12.5)

369hvor:y(tk) = K(1 − (−1)kMk) (12.6)og oversvinget M er givet ved:
M = exp
−ζπp
1 − ζ2
! (12.7)Oversvinget, M kan da bestemmes ud fra f.eks. det første oversving eller ud fra to på hinandenfølgende ekstremer. Dæmpningen, ζ, bestemmes da ud fra oversvinget ved:ζ =
−log(M)p
π2 + log(M)2(12.8)Svingningperioden, Tp, er givet ved:
Tp =2π
ω0
p
1 − ζ2(12.9)og kan let bestemmes grask. Deraf kan ω0 bestemmes, idet:
ω0 =2π
Tp
p
1 − ζ2=
2
Tp
q
π2 + log(M)2 (12.10)
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
t1 t2 t3
y1
y2
y3
Steprespons
tFigur 12.2. Steprespons for et andenordens system.2I (Rake 1980) er der gennemgået en række metoder, der er baseret på andre aperiodiskeindgangssignaler.12.2 FrekvensresponsmetoderI visse sammenhænge er det interessant at kende, hvorledes et system forstærker eller trans-mitterer indgangssignalets frekvensdele. Frekvensresponsmetoden er en ikkeparametrisk me-tode, der tager udgangspunkt i følgende sammenhæng:
Y (z) = G(z)U(z) + Y0(z) (12.11)

370 12.2 Frekvensresponsmetodermellem påvirkning, dennes (stationære) respons i frekvensdomænet samt en transient del.Metoden er kun anvendelig overfor stabile systemer. Hvis påvirkningen er givet ved:ut = αcos(ωt) (12.12)vil udgangen være:
yt = g(t) +Acos(ωt+ φ) (12.13)A = |G(ω)|α φ = arg(G(ω)) (12.14)hvor g(t) er transienten. Vi har, når transienten, g(t) er faded ud, et punkt i systemets (ellerrettere i overføringen fra styresignalet til udgangen) bodediagram. Lad
Ic(N) =1
N
NX
t=1
ytcos(ωt) Is(N) =1
N
NX
t=1
ytsin(ωt) (12.15)da er:|G(ω)| =
2
α
p
I2c + I2
s φ = −arctanIs(N)
Ic(N)(12.16)Denne pro edure skal naturligvis repeteres for hver værdi for ω og metoden kan være rettidskrævende, især hvis vi skal anvende lavfrekvente indgangssignaler. Metoden er megetsimpel og kræver få beregninger. Forstyrrelser kan elimineres på bekostning af større tidtil eksperimentet. Metoden, der helt klart har oprindelse fra kredsløbsteorien, og kan kunanvendes i forbindelse med stabile systemer.En variant af metoden består i at avende et påvirkningssignal med et højt frekvensindholdog FFT (Fast Fourier Transform). Lad:
YN(ω) =1
N
NX
t=1
yte−jωt
UN (ω) =1
N
NX
t=1
ute−jωt (12.17)der evalueret i:
ω =2πk
N, k = 1, ..., N (12.18)udgør den diskrete Fourier transform (DFT). Funktionen |UN (ω)|2 betegnes periodegrammetfor ut og angiver hvorledes energien i ut er fordelt over frekvensområdet. Det empiriskeestimat af overføringsfunktionen kan udtrykkes ved:
G(ejω) =YN(ω)
UN (ω)(12.19)Antag, at:
yt = G0(q)ut + vt (12.20)hvor vt er en svag stationær pro es med spektral tæthed Φv(ω) og hvor |ut| < C. Det kanvises (se. f.eks. (Ljung 1987) side 148) at:En
GN (ejω)o
= G0(ejω) +
ρ(N)
UN (ω)(12.21)hvor:
|ρ(N)| ≤ C√N
(12.22)

371For fejlen:G(ejω) = G0(e
jω) − G(ejω) (12.23)gælder det at:En
|G(ejω)|2o
=1
UN (ω)|2 [Φv(ω) + ρ2(N)] (12.24)hvor der eksisterer en konstant C2 således
|ρ2(N)| ≤ C2
N(12.25)Den empiriske overføringsfunktion kan estimeret i Matlab med pro eduren etfe.12.3 KorrelationsmetoderDet kan i andre sammenhænge være fordelagtigt at kende et systems trinrespons eller detsimpulsrespons. Lad os igen betragte sammenhængen
yt =∞X
s=0
hsut−s + vt (12.26)der er gældende under forudsætning af at systemet er stabilt. Antag, at indgangsignalet, ut,er en stationær stokastisk pro es, der er ukorreleret med vt. Vi har ifølge sætning 6.7 at:ryu(τ ) =
∞X
s=0
hsru(τ − s) (12.27)Under forudsætning af at pro esserne er ergodiske og at ut har en middelværdi lig nul kankovariansfunktionerne estimeres med:ryu(τ ) =
1
N
NX
t=1
ytut−τ ru(τ ) =1
N
NX
t=1
utut−τ (12.28)Dette estimat er kun asymptotisk entralt. Hvis vi istedet dividerer med N − τ får vi et entralt estimat, men til gengæld har det en større varians. (I (Ljung 1991) kan ryu(τ )bestemmes med ovf).Hvis ut er hvid støj med variansen σ2 er:ryu(τ ) = σ
2hτ (12.29)I dette tilfælde er spe ielt simpelt at bestemme systemets impulsrespons (og dermed ogsåtrinresponsen) ud fra et kendstab til krydskovariansfunktionen. I det generelle tilfælde kanimpulsresponsen beregnes ud fra den approximative sammenhæng:
ryu(τ ) =
MX
s=0
hsru(τ − s) (12.30)

372 12.4 Spektralanalyseder vektorielt kan udtrykkes ved:0
B
B
B
@
ryu(0)ryu(1)...ryu(M)
1
C
C
C
A
=
2
6
6
6
6
6
4
ru(0) ru(1) · · · ru(M − 1) ru(M)ru(1) ru(0) ru(M − 2) ru(M − 1)... ... ... ...
ru(M − 1) ru(M − 2) ru(0) ru(1)ru(M) ru(M − 1) · · · ru(1) ru(0)
3
7
7
7
7
7
5
0
B
B
B
@
h0
h1...hM
1
C
C
C
A(12.31)Imidlertid kan der ud fra (et estimat af) kovariansfunktionen for ut bestemmes et lter L(q)således atu
ft = L(q)ut (12.32)approximativt er hvid. Dette svarer til at modellere påvirkningssignalet som:
ut = L−1(q)et (12.33)hvor et er hvid støj. Filtreres udgangen tilsvarende
yft = L(q)yt (12.34)gælder at:
ryf uf(τ ) = σ
2fhτ (12.35)I Matlab udføres denne analyse med ra.Der er to vigtige fejlkilder for denne metode. Der eksisterer for det første en kraftig korrela-tion mellem efterfølgende værdier af krydskovariansen. Dette udnyttes ikke i denne metode.For det andet er estimatet for krydskovariansen selv for store værdier af N forbundet meden stor usikkerhed.12.4 SpektralanalyseLad os nu betragte modelstrukturen:
yt = Hs(q)ut +Hn(q)et (12.36)Vi har ifølge sætning 6.7 [side 244 at:Φyu(ω) = H(ejω)Φu(ω) (12.37)hvor Φyu(ω) er krydsspektraltætheden mellem udgangen, yt, og indgangssignalet, ut. Umid-delbart kan de ukendte spektrale tætheder estimeres ved at fouriertransformere de estime-rede kovariansfunktioner, d.v.s.:
Φy(ω) =1
2π
NX
τ=−N
ry(τ )e−jτω Φyu(ω) =1
2π
NX
τ=−N
ryu(τ )e−jτω (12.38)hvor N er antallet af datapunkter. Nu er problemet imidlertid at estimatet af kovarians-funktioner er forbundet med en stor usikkerhed, spe ielt for store værdier af τ (i forhold tilN).

373Lad nu:ry(τ ) = w(τ )ry(τ ) (12.39)og tilsvarende for ryu. Vægtfunktionen betegnes også som en vinduesfunktion (lag window)og opfylder at:
w(τ ) = 0 for |τ | ≥M (12.40)Estimatet af den spektrale tæthed er nu:Φy(ω) =
1
2π
NX
τ=−N
ry(τ )e−jωτ =
Z π
−π
W (ν − ω)Φ(ν)dω) (12.41)hvor W (ω)- det spektrale vindue - er den fouriertransformerede af vægtfunktionen, W (ω).Størrelsen M bestemmer bredden af vinduet. Store vinduesbredder giver snævre spektralevinduer, hvilket giver en høj spektralopløsning på bekostning af en øget følsomhed overforforstyrrelser.Ved at anvende et vindue i spektralestimatet indføres samtidig en bias i estimatet. Dennebias er aftagende med M, hvorimod variansen af estimatet er tiltagende. Vi har altså igendet klassiske problem mellem bias og varians. Som konklusion kan anføres at valget af Mikke er simpelt og at den optimale værdi dels afhænger af ovenstående faktorer og dels afdet ukendte spektrum. En tommelngerregel er at vælge M mellem 2 og 10 N .Spektralanalyse er ofte anvendt i forbindelse med tidsrækkeanalyse og stokastiske systemer.Som vi har set er det eneste krav at systemet er lineært. Indgangssignalet eller påvirk-ningssignalet kan vælges frit så længe det ikke afhænger af udgangssignalet. Denne metoderesulterer i systemet bodediagram. Hvis en parametrisk model for systemet er nødvendig,f.eks. i forbindelse med design af reguleringssystem eller simulation, må der approximeresen sådan model til bodeplottet. Sådan en metode er diskuteret i Isermann (1979). Det erimidlertid bedre direkte at tilpasse en parametrisk model til den forelagte datarække, f.eks.med en af de metoder, der er beskrevet i det følgende.
374 12.4 Spektralanalyse
Kapitel 13Parameterestimation - EksterneModellerDette kapitel vedrører estimation af parametre i modeller af dynamiske systemer. Dennedis iplin udgør den entrale del af identikationspro essen. Udgangspunktet er en valgtmodelstruktur, hvis parametre der ønskes bestemt ud fra målinger af sammenhængendeværdier af påvirkninger (eventuelt styreindgreb) og respons (udgangssignal). Resultatet erførst og fremmest et sæt parameterestimater samt et mål for deres usikkerhed. Sekundærter resultatet en fejlsekvens, hvis statistiske egenskaber danner grundlag for ere metoder tilmodelvalidering.I kapitel 10 har vi betragtet eksterne modeller for lineære dynamiske systemer. Vi så der,at den generelle model for et skalart stokastisk system kan skrives på formen:yt = Hs(q)ut +Hn(q)et (13.1)hvor yt og ut henholdsvis er udgangs - og indgangs/styresignal. De stokastiske forstyrrelser,der påvirker systemet, kan modelleres ved en overføring, Hn(q), og en stokastisk pro es,
et, der er en sekvens af ukorrelerede stokastiske variable.Dette kapitel indledes med at betragte estimationsproblemet i forbindelse med en simpelmodel struktur. Når de prin ipielle problemer er belyst udvides model strukturen til at in-kludere ARMAX-modellerne. Kapitlet afsluttes med en beskrivelse af metoder til estimationaf parametre i den generelle lineære model. 375

376 13.1 ARX-Strukturen13.1 ARX-StrukturenVi vil i dette afsnit betragte metoder til estimation af systemparametre for det tilfælde, atmodellen er givet ved:Hs(q) = q
−kB(q−1)
A(q−1)Hn(q) =
1
A(q−1)(13.2)Her er A og B er polynomier i q−1, d.v.s.:
A(q−1) = 1 + a1q−1 + ...+ anaq
−na (13.3)B(q−1) = b0 + b1q
−1 + ...+ bnbq−nb (13.4)Her k tidsforsinkelsen fra styreindgreb til udgang. Denne model kan også udtrykkes påformen:
A(q−1)yt = q−kB(q−1)ut + et (13.5)Ovenstående modeltype betegnes som en ARX-model (AutoRegressive models with eXternalsignal). I visse dele af litteraturen ser man også denne modeltype betegnet som en CAR -model (Controlled AutoRegressive).Videre kan ARX-modellen, (13.5), ekspli it skrives som:
yt + a1yt−1 + ...+ anayt−na = b0ut−k + ... + bnbut−nb−k + et (13.6)eller som:
yt = −a1yt−1 − ... − anayt−na + b0ut−k + ...+ bnbut−nb−k + et (13.7)Indføres nu regressionsvektoren:
ϕt = (−yt−1,−yt−2, ...,−yt−na , ut−k, ut−k−1, ..., ut−nb−k)T (13.8)samt parametervektoren:θ = (a1, a2, ...ana , b0, b1, ..., bnb
)T (13.9)da kan modellen også angives på formen:yt = ϕ
Tt θ + et t = 1, ..., N (13.10)Bemærk, at strukturen indenfor ARX-modellerne er karakteriseret ved parametrene i vek-toren:
ns = (na, 1 + nb, k) (13.11)hvor de to første størrelser (praktisk) angiver, hvor mange parametre der estimeres i A-henholdsvis B-polynomiet.Vi har nu bragt systembeskrivelsen på en form, der er lineær i systemparameterne, hvilketbringer os i stand til at anvende de metoder til parameterestimation som vi har behandlet

13.1.1 LS-Estimation 377i kapitel 3.7. Hvis vi som i førnævnte kapitel arrangerer alle målingerne af udgangen i envektor Y, hvor:YN = Y =
8
>
>
>
<
>
>
>
:
y1y2...yN
9
>
>
>
=
>
>
>
;
(13.12)og på tilsvarende måde arrangerer regressorerne i en matrix,Φ =
8
>
>
>
<
>
>
>
:
ϕT1
ϕT2...
ϕTN
9
>
>
>
=
>
>
>
;
(13.13)(det antages at y0, y−1, ...y−na , u−1, u−2, ..., u−nb−k kendes) kan situationen også beskrivesved:Y = Φθ + e (13.14)hvor vektoren e indeholder støjsekvensen.13.1.1 LS-EstimationVi vil nu relaksere på antagelsen vedrørende støjsekvensen, et, og betragte LS - metoden(mindste kvadraters metode). Målet med denne metode er at bestemme et estimat af θsåledes at afstanden mellem målinger (Y) og model (Φθ) er mindst mulig.For en given vilkårlig estimator, θ, indføres som i kapitel 3.7 residualerne og residualvektoren:
εt = yt − ϕTt θ ε = Y − Φθ (13.15)hvorved LS - estimatoren, θ, er deneret som minimumspunktet til kvadratsummen:
JN (θ) =1
2
NX
t=1
ε2t =
1
2ε
Tε (13.16)Sætning: 13.1 LS-estimatoren for θ i modellen (13.5) er, under forudsætning af at ΦT Φ erinverterbar, givet ved:
θ =“
ΦT Φ”−1
ΦTY (13.17)
2Estimatoren kan også skrives på formen:
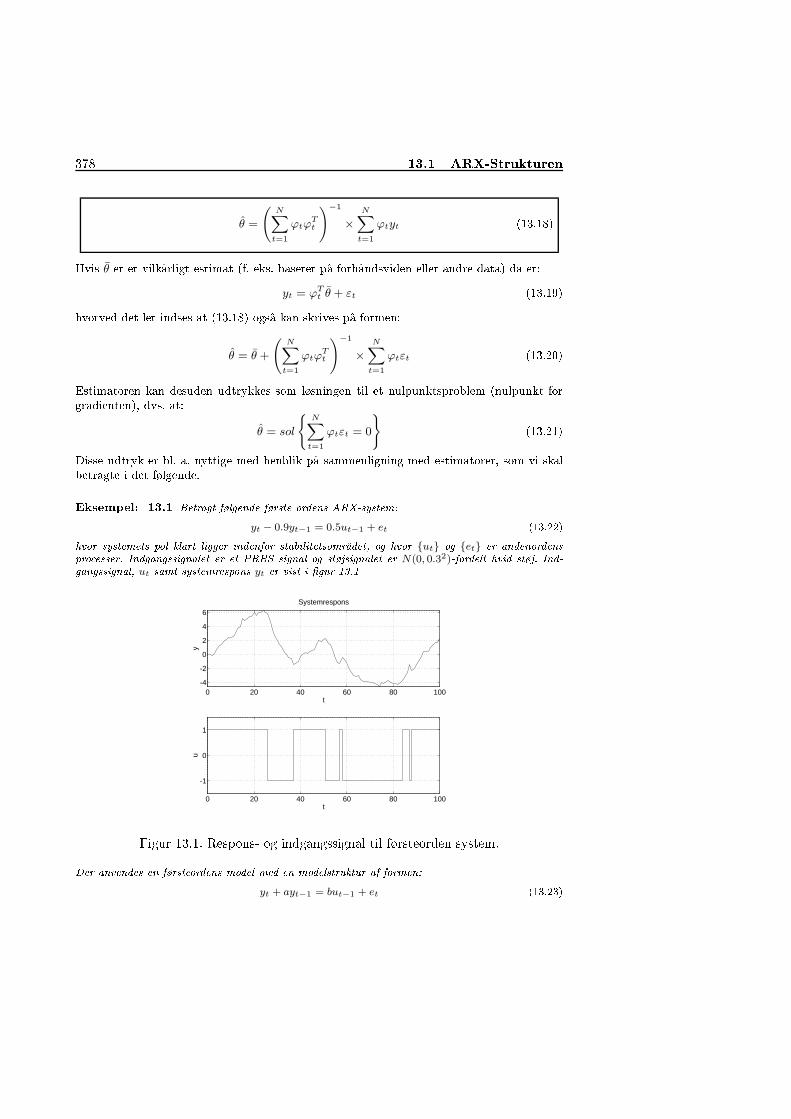
378 13.1 ARX-Strukturenθ =
NX
t=1
ϕtϕTt
!−1
×NX
t=1
ϕtyt (13.18)Hvis θ er et vilkårligt estimat (f. eks. baseret på forhåndsviden eller andre data) da er:yt = ϕ
Tt θ + εt (13.19)hvorved det let indses at (13.18) også kan skrives på formen:
θ = θ +
NX
t=1
ϕtϕTt
!−1
×NX
t=1
ϕtεt (13.20)Estimatoren kan desuden udtrykkes som løsningen til et nulpunktsproblem (nulpunkt forgradienten), dvs. at:θ = sol
(
NX
t=1
ϕtεt = 0
) (13.21)Disse udtryk er bl. a. nyttige med henblik på sammenligning med estimatorer, som vi skalbetragte i det følgende.Eksempel: 13.1 Betragt følgende første ordens ARX-system:yt − 0.9yt−1 = 0.5ut−1 + et (13.22)hvor systemets pol klart ligger indenfor stabilitetsområdet, og hvor ut og et er andenordenspro esser. Indgangssignalet er et PRBS signal og støjsignalet er N(0, 0.32)-fordelt hvid støj. Ind-gangssignal, ut samt systemrespons yt er vist i gur 13.1
0 20 40 60 80 100-4
-2
0
2
4
6Systemrespons
y
t
0 20 40 60 80 100
-1
0
1
u
tFigur 13.1. Respons- og indgangssignal til førsteorden system.Der anvendes en førsteordens model med en modelstruktur af formen:yt + ayt−1 = but−1 + et (13.23)

13.1.1 LS-Estimation 379dvs. model og system har præ is samme struktur. Strukturen er bestemt af at:ns = [na, 1 + nb, k] = [1, 1, 1] (13.24)Der estimeres 2 parametre (en a-parameter og en b-parameter) Her er:
θ =
„
ab
«
ϕt =
„
−yt−1
ut−1
« (13.25)og dermed er:θ =
8
>
<
>
:
PNt=1 y2
t−1 −PN
t=1 yt−1ut−1
−PN
t=1 yt−1ut−1PN
t=1 u2t−1
9
>
=
>
;
−1
×
8
>
<
>
:
−PN
t=1 yt−1yt
PNt=1 ut−1yt
9
>
=
>
;
(13.26)Det bemærkes, at der eksisterer en tæt knytning mellem kovariansfunktionen og estimation i ARXstrukturen. Et kendskab til variansfunktionen (auto såvel som krydskovariansfunktion) kan anvendestil at bestemme et estimat i ARX strukturen.En anden metode er at anvende Matlab's Systemidenti ation toolbox (se (Ljung 1991)). Pro e-duren arx estimerer parametre i en ARX model med strukturen (givet ved vektoren ns). Data erbeliggende i vektorerne y og u, mens resultatet, der overføres til en variabel med betegnelsen th(et array) indeholder langt mere end blot estimatet, θ. Kommandoen present udskriver en del afestimationsresultaterne, bla. estimaterne og deres usikkerheder (det vil her sige deres marginalespredninger). Det skal bemærkes at kommandoen udskriver estimatet af B = q−kB og deres usik-kerheder (marginale spredninger). Tabsfunktionen, Loss f n, er givet ved:W (θ) =
1
M
MX
i=1
ε2i (13.27)hvor M er antal datapunkter anvendt i estimationen (der sædvanligvis er lidt mindre end antalletaf elementer i y og u). Ud over administrative oplysninger samt samplingperiode er der i udskriftenangivet Akaike's FPE, der vil blive omtalt senere i kapitel 15.>>ns=[1 1 1;>>th=arx([y u,ns);>>present(th)This matrix was reated by the ommand ARX on 10/6 1993 at 14:37Loss f n: 0.09331 Akaike`s FPE: 0.09712 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.44700 0.0351A = 1.0000 -0.91870 0.0115Med kommandoen th2par kan bl.a. andet estimater og deres variansmatrix P udtrækkes af resulta-tarrayet, th, og resultatet kan præsenteres (med kommandoen estpres) sammen med de respektive(marginale) 99% kondensintervaller (dvs. givet ved variationsområdet +/- eller ved nedre grænselower limit samt øvre grænse upper limit).>>[parm,P=th2par(th);>>estpres(parm,P)estimate 99% inf

380 13.1 ARX-Strukturenestimat +/- ll ul-0.9187 0.0296 -0.9483 -0.88910.4470 0.0904 0.3566 0.5374Det bemærkes, at de korrekte værdier ligger indenfor kondensintervallerne (idet vi selv har gene-reret data ved simulation og derfor har den luksus at kende de korrekte systemparametre). 2LS-metoden er meget enkel at anvende idet tabsfunktionen er kvadratisk i parametrene.Løsningen kan derfor angives på sluttet form, og det er derfor ikke nødvendigt at anvendetidskrævende søgeroutiner.Antag, at det datagenererende system er givet ved:S A0(q
−1)yt = q−kB0(q
−1)ut + ζt (13.28)eller tilsvarende at:yt = ϕ
Tt θ0 + ζt (13.29)Antages det, at ordenen af polynomier og tidsforsinkelser i både model og system er desamme, da fås ved direkte indsættelse i (13.18) at:
θ = θ0 +
1
N
NX
t=1
ϕtϕTt
!−1
× 1
N
NX
t=1
ϕtζt (13.30)Der gælder under ret svage antagelser (se (Söderström & P. Stoi a 1989) p. 186 og p. 548)at gennemsnittene konvergerer mod de forventede værdier for N → ∞. Dvs. at estimaterneer konsistente såfremt:EϕϕT er inverterbar (13.31)Eϕtζt = 0 (13.32)Normalt er (13.31) opfyldt. Der er dog en række vigtige undtagelser, som vi vil kommetilbage til. Derimod er (13.32) normalt ikke opfyldt. Undtagelsen er når ζt er hvid støj.Hvis ζt ikke er hvid, vil der (hvis na > 0) være en korrelation mellem ζt og ϕt. Vi vilvende tilbage til konvergensanalysen senere.Eksempel: 13.2 I gure 13.2 er påvirkningssignal (et PRBS-signal) samt systemets (støddæm-persystemet) respons angivet. Systemet er givet ved:
yt = q−1 0.90 + 0.085q−1
1 − 1.66q−1 + 0.83q−2ut + et (13.33)hvor et er en sekvens af uafhængige N(0, 1)-fordelte stokastiske variable.Nedenstående listning viser resultatet, hvis parametrene estimeres i en ARX-model af typen:
(1 + a1q−1 + a2q−1)yt = q−1(b0 + b1q−1)ut + ζt (13.34)
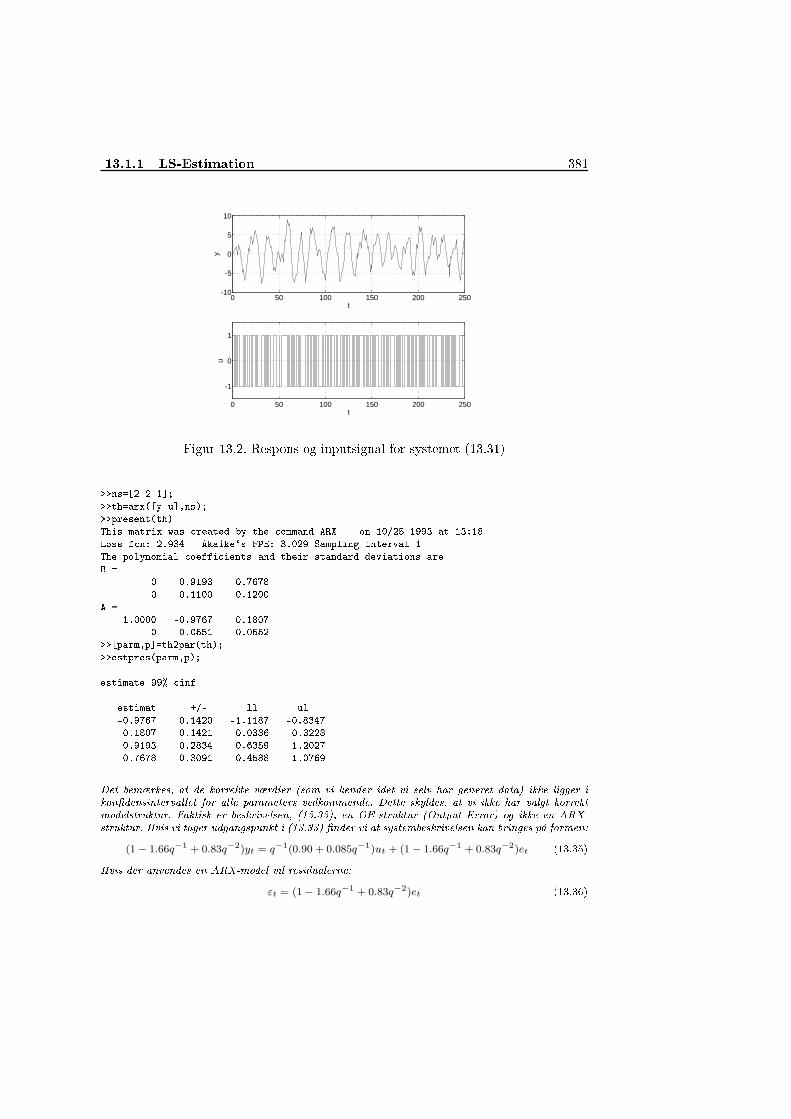
13.1.1 LS-Estimation 3810 50 100 150 200 250
-10
-5
0
5
10y
t
0 50 100 150 200 250
-1
0
1
u
tFigur 13.2. Respons og inputsignal for systemet (13.31)>>ns=[2 2 1;>>th=arx([y u,ns);>>present(th)This matrix was reated by the ommand ARX on 10/25 1993 at 13:18Loss f n: 2.934 Akaike`s FPE: 3.029 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.9193 0.76780 0.1100 0.1200A = 1.0000 -0.9767 0.18070 0.0551 0.0552>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-0.9767 0.1420 -1.1187 -0.83470.1807 0.1421 0.0386 0.32280.9193 0.2834 0.6359 1.20270.7678 0.3091 0.4588 1.0769Det bemærkes, at de korrekte værdier (som vi kender idet vi selv har generet data) ikke ligger ikondensintervallet for alle parameters vedkommende. Dette skyldes, at vi ikke har valgt korrektmodelstruktur. Faktisk er beskrivelsen, (13.33), en OE-struktur (Output Error) og ikke en ARX-struktur. Hvis vi tager udgangspunkt i (13.33) nder vi at systembeskrivelsen kan bringes på formen:(1 − 1.66q−1 + 0.83q−2)yt = q−1(0.90 + 0.085q−1)ut + (1 − 1.66q−1 + 0.83q−2)et (13.35)Hvis der anvendes en ARX-model vil residualerne:
εt = (1 − 1.66q−1 + 0.83q−2)et (13.36)

382 13.1 ARX-Strukturenvære korrelerede for korrekte parameterestimater (af parametrene i A og B polynomierne, der indgåri ARX-strukturen). Derfor er estimaterne ikke korrekte estimater af parametrene i (13.33).213.1.2 OE-metoderI dette afsnit skal vi kort beskrive OE-metoden (Output Error metoden). I visse tilfældeer man kun interesseret i nde en model for overføringen, Hs(q), fra indgangssignalet ut tiludgangen yt, dvs.
yt = Hs(q)ut + vt = q−kB(q−1)
F (q−1)ut + vt (13.37)Modellen af de stokastiske forstyrrelser, vt, kan af forskellige årsager være af mindre interesse.Det kan f.eks. være, at man har valgt at se bort fra dem i modelleringen (f.eks. fordi reguleringikke tager hensyn til de stokastiske forstyrrelser), eller at signal/støj forholdene er således,at det er svært at estimere parametre i støjmodellen.En af OE-metodens fordele er, at en høj samplingfrekvens ikke har helt så skadelig eekt pånøjagtigheden som metoder baseret på en (et trins) prædiktionsfejlsmetode. Til metodensulemper hører, at kriteriefunktionen ikke er kvadratisk i parametrene.OE-metoden er baseret på en minimering af:
J =1
2
NX
t=1
ε2t hvor εt = yt − q
−k B(q−1)
F (q−1)ut (13.38)Strukturen i en OE-model er bestemt ved:
ns = [1 + nb, naf , k] (13.39)Minimum af (13.38) kan ndes på ere numeriske måder. Da en OE-metode algoritmiskkan opfattes som et spe ialtilfælde af en PEM-metode vil de algoritmiske overvejelser blivebeskrevet i et senere afsnit (afsnit 13.3). Vi angiver imidlertid et eksempel.Eksempel: 13.3 Lad os forsætte eksempel 13.2. Estimeres parametrene i en OE-model fås føl-gende resultater.>>ns=[2 2 1;>>th=oe([y u,ns);>>present(th)This matrix was reated by the ommand OE on 10/25 1993 at 13:36Loss f n: 1.081 Akaike`s FPE: 1.116 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.8915 0.09830 0.0463 0.0555F =

13.1.3 IV-Estimation. 3831.0000 -1.6636 0.83460 0.0063 0.0055>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul0.8915 0.1193 0.7721 1.01080.0983 0.1429 -0.0447 0.2412-1.6636 0.0161 -1.6797 -1.64740.8346 0.0141 0.8205 0.8487Det bemærkes at den korrekte værdi tilhører kondensintervallet for alle parametre. Dette skyldesnaturligvis at vi anvender korrekt modelstruktur. 213.1.3 IV-Estimation.I det tidligere afsnit så vi LS-estimatorens styrke i at kriteriefunktionen er kvadratisk i para-metrene. I visse tilfælde er man som nævnt i forbindelse med OE-metoden kun interessereti nde en model for overføringen, Hs(q), fra indgangssignalet ut til udgangen yt. For atudnytte LS-metoden styrke og samtidig kun at fokusere på overføringen fra styresignal, uttil udgang, yt (dvs. uden at modellere de stokastiske forstyrrelser, der påvirker systemet) vilman være interesseret i at estimere parametrene i modellen:A(q−1)yt = q
−kB(q−1)ut + vt (13.40)hvori der ikke anlagt nogen antagelse om hvidhed i vt. LS-metoden en enkel og megetslagkraftig metode til at opnå dette. Ulempen ved dette er blot, at hvis strukturen i detdatagenerende system ikke er en ARX-struktur vil vt ikke være hvid og LS-estimatoren erderfor ikke konsistent. En måde hvorpå problemet kan omgås er at erstatte estimatoren i(13.5) med:
θ =
NX
t=1
ψtϕt
!−1
×NX
t=1
ψTt yt (13.41)hvor instrumentvektoren ψt er tæt relateret til ϕt, men med den egenskab at:IV.1 Eψtvt = 0IV.2 Eψtϕ
Tt er inverterbar.Disse krav til instrumentvariablene kan sammenlignes med (13.31) og (13.32). Denne esti-mator kan i lighed med (13.17) skrives som:
θ =“
ΨT Φ”−1
ΨTY (13.42)

384 13.1 ARX-Strukturenhvor Ψ rækkevis indeholder ψTt . Bemærk, at strukturen i modellen, der anvendes i forbindelsemed en IV-metode er den samme som i forbindelse med en ARX-struktur og at denne kanangives med vektoren:
ns = [na, 1 + nb, k] (13.43)Der eksisterer ere forskellige mulige valg af instrumentvariable, der opfylder (IV.1) og(IV.2). Et forslag er:ψt = (−yt−1,−yt−2, ...,−yt−na , ut−k, ..., ut−nb−k)T (13.44)hvor:
yt =B(q−1)
A(q−1)ut (13.45)Der kan spe ielt vælges, at B = B og A = A. Idet en IV-metode sædvanligvis anvenderinstrumentvariable, der er fremkommet ved ltrering gennem overføringer, hvis koe ienterer estimeret er IV-metoden normalt iterativ. Iterationen kan f.eks. startes i et estimat afparametrene i en ARX-struktur. Det kan vises, at IV-metoden i visse spe ielle tilfælde erkonsistent.Bemærk, at metoden typisk vil anvendes i det quasideterministiske område dvs. i det områdehvor det stokastiske ikke er forsvindende (og dermed kan inuere på et almindeligt LS-estimat) og hvor signal-støjforholdet er sådan, at det ikke er muligt at estimere parametrenei en støjmodel.Som angivet ovenfor eksisterer der forskellige varianter af IV-metoderne og de er oftestiterative. IV4-metoden er en spe iel IV-metode, hvor der anvendes et fast (4) antal forskelligeiterationer til bestemmelse af estimatet (se (Ljung 1987) p. 403 for nærmere detaljer).Eksempel: 13.4 Lad os forsætte eksempel 13.2 og 13.3.>>ns=[2 2 1;>>th=iv4([y u,ns);>>present(th)This matrix was reated by the ommand IV4 on 10/25 1993 at 13:45Loss f n: 1.196 Akaike`s FPE: 1.235 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.9334 0.04710 0.0587 0.0650A = 1.0000 -1.6627 0.83300 0.0099 0.0093>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-1.6627 0.0256 -1.6882 -1.63710.8330 0.0239 0.8092 0.85690.9334 0.1513 0.7821 1.08470.0471 0.1674 -0.1203 0.2144

13.1.4 ML-Estimation. 385Det bemærkes at de korrekte værdier alle ligger indenfor 99% kondensintervallet. 213.1.4 ML-Estimation.Lad os nu (dels af hensyn til helheden og dels med henblik på senere referen er) studeremaximum likelihood estimation af systemparametre, når systemet er givet ved:A(q−1)yt = q
−kB(q−1)ut + et (13.46)og hvor et er en sekvens af uafhængige F(0, σ2t ) -fordelte stokastiske variable. Det antagesdesuden at fordelingen (d.v.s. typen) af modelfejlen, et, kendes. Denne systembeskrivelsekan som tidligere omskrives til:
yt = ϕTt θ + et (13.47)Lad som i det forrige Yt betegne en vektor indeholdende målesignaler fra 1 til t. Med henblikpå opskrivning af likelihoodfunktionen udregner vi den betingede simultane tæthedsfunk-tion:
f(YN |θ) = f(yN |YN−1, θ)f(YN−1|θ) =
NY
t=1
f(yt|Yt−1, θ) (13.48)Hvis vi følger den sædvanlige praksis og arbejder med den negative logaritme til likelihood-funktionen, er ML - estimatoren derfor givet ved:θ = argmin
θ
(
NX
t=1
−log (f(yt|Yt−1, θ))
) (13.49)Ovenstående udtryk er gældende generelt for ML - estimation af systemparametre og gælderbåde for interne og eksterne systemmodeller. Vi anfører derfor følgende sætning.Sætning: 13.2 ML - estimatoren for parametre i et dynamisk system kan skrives som:θ = argmin
θ
(
NX
t=1
ρ(θ)
) (13.50)hvor:ρ(θ) = −log (f(yt|Yt−1, θ)) (13.51)
2Bemærk, at (13.50) og (13.51) kun er en ud af mange mulige måder, hvorpå ML - estimatorenkan udtrykkes. Bemærk ligeledes, hvordan ovenstående sætning angiver sammenhængenmellem (ettrins)prædiktion og estimation. Videre har vi, når systemet er givet ved (13.5),

386 13.1 ARX-Strukturenat ettrinsprædiktoren kan skrives som:yt|t−1 = Eyt|Yt−1, θ
= b0ut−k + ...+ bnbut−nb−k − a1yt−1 − ...− anayt−na
= ϕTt θ
= q−kB(q−1)ut + (1 − A(q−1))ytDa et er uafhængig af Yt−1 og:
yt = yt|t−1 + etda er den prædiktive tæthed givet ved:f(yt|Yt−1, θ) = fe(εt|θ)hvor prædiktionsfejlen er:
εt = yt − yt|t−1Bemærk, at der notationsmæssigt ikke er inddraget afhængigheden af θ. f. eks. er:εt = ε(t, θ) yt|t−1 = y(t|Yt−1, θ)Inden vi spe ialiserer resumeer vi i følgende sætning (der er generelt gældende for model-strukturer,hvor parametrene kun indgår i den betingede middelværdi (prædiktoren, dvs.f.eks. ikke sige i den betingende varians).Sætning: 13.3 Antag, at der for et dynamisk system gælder, at prædiktionsfejlen i:
εt = yt − y(t|Yt−1, θ)er uafhængig af Yt−1. Da gælder, at ML-estimatoren for θ kan skrives som:θ = argmin
θ
(
NX
t=1
ρ(εt)
) (13.52)hvor:ρ(εt) = −log (fe(εt|θ)) (13.53)
2Bemærk, som tidligere nævnt, at denne sætning er generel og ikke kun knyttet til ARX-strukturen. Vi vil senere anvende denne sætning i forbindelse med andre modelstrukturer.Hvis tæthedsfunktionen yderligere afhænger af ukendte parametre, der ikke er systempara-metre, (som f. eks. σ2) inkluderes disse blot i θ og minimum søges for den derved fremkomneudvidede vektor. Lad os nu spe ialisere til en bestemt fordelingstype.

13.1.4 ML-Estimation. 387Normalfordelt støjAntag, at:et ∈ N(0, σ2)d.v.s. at:
fe(x) =1√2πσ
exp−1
2
“x
σ
”2
og dermed at:ρ(εt) = log(σ) +
1
2log(2π) +
1
2
“
ε
σ
”2ML - estimatoren, θ, ndes som minimum af:JN (θ) =
1
2
NX
t=1
ε2tLad os resumere i følgende sætning.Sætning: 13.4 Antag, der for et dynamisk system gælder, at prædiktionsfejlen i:
εt = yt − y(t|Yt−1, θ)er uafhængig af Yt−1 og er normalfordelt. Da gælder, at ML-estimatoren for θ kan skrives som:θ = argmin
θ
(
1
2
NX
t=1
ε2t
) (13.54)og at ML-estimatet for σ2 er givet ved:σ
2 =2
NJN (θ) =
1
N
NX
t=1
ε2t
2Bevis: Beviset for variansestimatet overlades til læseren. 2Bemærk, at vi endnu ikke har anvendt strukturen i ARX modellen. Det er klart (j.v.f. detkvadratiske kriterium (13.54) at for gaussiske forhold er ML-estimatoren for systemparame-trene i (13.5) identisk med LS-estimatoren fra sætning 13.1. Vi resumeer derfor i følgendesætning:Sætning: 13.5 Når et i (13.5) er en sekvens af uafhængige N(0, σ2)-fordelte stokastiskevariable, da er ML - estimatoren for θ i (13.10) identisk med LS-estimatoren (13.18), d.v.s. at:

388 13.1 ARX-Strukturenθ =
NX
t=1
ϕtϕTt
!−1
×NX
t=1
ϕtyt (13.55)Sætning 13.2 og 13.3 er gyldige for denne estimator. Der gælder desuden at estimatoren erasymptotisk e ient. 2Bevis: Sætningens første del er en simpel følge af (13.54) og af sætning 13.1. 2Det kan vises at:P =
1
N
NX
t=1
ε2t ×
(
NX
t=1
ϕtϕTt
)−1er et approximativt estimat for variansen af estimationsfejlen.Bemærk, at det i dette ARX-tilfælde er muligt at give en sluttet løsning for minimerings-problemet, (13.54), fordi εt præ is er lineær i θ, d.v.s.εt = yt − ϕ
Tt θeller at:
εt = ε(t, θ) = B(q−1)ut +`
1 − A(q−1)´
yt13.1.5 Bayes Estimation.Dette afsnit afsluttes med en diskussion af Bayes estimation af parametre i dynamiske sy-stemer. Diskussionen er her entreret om estimation af parametre i ARX - modeller påvirketaf gaussisk støj, d.v.s. at:A(q−1)yt = B(q−1)ut + et (13.56)hvor eter en sekvens af uafhængige N(0,σ2
t ) - fordelte stokastiske variable. Det erindres atdenne systembeskrivelse også kan bringes på formen:yt = ϕ
Tt θ + et (13.57)Vi tager udgangspunkt i følgende situation. Forhåndskendskab og dataopsamling er til tids-punktet t resulteret i følgende fordeling for systemparametrene:
θ|Yt ∈ N(θt, Pt) (13.58)For næste måling (til tidspunktet t+1) gælder der:yt+1 = ϕt+1θ + et+1 (13.59)Fra afsnit 3.7 ved vi at den betingede forventingsværdi minimerer kriteriet:J = E|θ − θ|2 (13.60)hvorfor vi er interesseret i at nde fordelingen af θ betinget Yt+1. Dermed har vi den betin-gede middelværdi, dvs. estimatet, samt højere momenter, der beskriver dettes egenskaber.Som en direkte anvendelse af 3.36 har vi følgende sætning.

13.1.5 Bayes Estimation. 389Sætning: 13.6 Middelkvadrat estimatoren for θ i (13.5) er, når et er en sekvens af uaf-hængige N(0, σ2)-fordelte stokastiske variable, givet ved rekursionen:θt+1 = θt +Kt+1(yt+1 − ϕ
Tt+1θt) (13.61)
Kt+1 =Pt+1ϕt+1
σ2t+1
= Ptϕt+1
“
ϕTt+1Ptϕt+1 + σ
2t+1
”−1 (13.62)P
−1t+1 = P
−1t +
ϕt+1ϕTt+1
σ2t+1
Pt+1 =“
I −Kt+1ϕTt+1
”
Pt (13.63)hvor:θ|Yt ∈ N(0, Pt) (13.64)
2Bemærk, at estimationsfejlen, θt, ikke i dette tilfælde er uafhængig af data (dvs. Yt), hvilketskyldes, at ϕt ikke her er deterministisk (hvilket var tilfældet i forbindelse med Kalmanlteret). Der gælder, at:θ|Yt ∈ N(0, Pt) (13.65)men vi kan ikke som i forbindelse med tilstandsestimation (eksakt) slutte hvorledes θ (u-betinget) er fordelt. På grund af at vi kender hvorledes θ asymptotisk (t → ∞) er fordeltgælder der approximativt at θ er normalfordelt dvs. at:θt∈N(0, Pt) (13.66)Bemærk, at den absolutte værdi af σ2 ikke kræves i rekursionerne til bestemmelse af esti-matet. Hvis σ2 er konstant kan rekursionerne normeres og variansniveauet indgår ikke iproblemet. Vi har at:
θt+1 = θt +Kt+1(yt+1 − ϕTt+1θt) (13.67)
Kt+1 = Pt+1ϕt+1 =Ptϕt+1
ϕTt+1Ptϕt+1 + 1
(13.68)P
−1t+1 = P
−1 + ϕt+1ϕTt+1 Pt+1 =
“
I −Kt+1ϕTt+1
”
Pt (13.69)Rekursionerne kan sammenlignes med de tidligere givne udtryk til bestemmelse af estimatetaf parametre i et ARX-system. Det bemærkes, at Bayes-estimatet blot er en rekursiv udgaveaf f. eks. LS-estimatet.Bemærk, at hvis antagelsen om gaussisk fordelte stokastiske variable opgives, da er sætningengyldig når den optimale estimator ndes blandt de lineære estimatorer.
390 13.2 ARMAX-Strukturen13.2 ARMAX-StrukturenSom et mellemtrin mellem den simple ARX-model og den helt generelle model vil vi i detteafsnit betragte metoder til estimation af parametrene i modeller givet ved:Hs(q) = q
−kB(q−1)
A(q−1)Hn(q) =
C(q−1)
A(q−1)(13.70)hvor A, B og C er polynomier i q−1, d.v.s.:
A(q−1) = 1 + a1q−1 + · · · + anaq
−na
B(q−1) = b0 + b1q−1 + · · · + bnb
q−nb
C(q−1) = 1 + c1q−1 + · · · + cncq
−ncDenne model kan også udtrykkes på formen:A(q−1)yt = q
−kB(q−1)ut +C(q−1)et (13.71)Strukturen i en ARMAX-model er fastlagt ved vektoren:
ns = (na, nb + 1, nc, k) (13.72)hvor antallet af estimerede parametre i (13.71) praktisk er identisk med summen af de treførste elementer i ns. Vi kan også opfatte modelstrukturen i (13.71) som værende fremkom-met ved en omformning af L-modelstrukturen. I så fald vil de indgående polynomier ikkevære primiske. Denne modeltype, (13.71) betegnes som en ARMAX-model (AutoRegressive,Moving Average models with eXternal signal). I visse dele af litteraturen ser man også den-ne modeltype betegnet som en CARMA-model (Controlled AutoRegressive Moving Averagemodel).ARMAX-modellen, (13.71), kan i direkte forlængelse af tilfældet fra ARX-modellen ekspli itskrives som:yt + a1yt−1 + · · · + anayt−na
= b0ut−k + b1ut−k−1 + · · · + bnbut−nb−k
+et + c1et−1 + · · · + cncet−nceller som:yt = −a1yt−1 − · · · − anayt−na
+b0ut−k + b1ut−k−1 + · · · + bnbut−nb−k
+c1et−1 + · · · + cncet−nc
+etIndføres nu regressionsvektoren:ϕt = (−yt−1, · · · ,−yt−na , ut−k, ut−1−k, · · · , ut−nb−k, et−1, · · · , et−nc)
T (13.73)
13.2.1 ELS-Estimastion 391samt parametervektoren:θ = (a1, · · · , ana , b0, b1, · · · , bnb
, c1, · · · , cnc )T (13.74)da kan modellen som i ARX tilfældet også angives på formen:yt = ϕ
Tt θ + et (13.75)Systembeskrivelsen er nu bragt på en form, der tilsyneladende er lineær i systemparame-trene, hvilket motiverer en anvendelse af metoder fra kapitel 3.7. Det skal dog understregesmodellen (13.75) indeholder signaler (et−i), der ikke er kendte, men som må estimeres. Hvisvi som i førnævnte kapitel arrangerer alle målingerne af udgangen i en vektor YN , hvor:
YN = (y1, yt2 , ..., yN)T (13.76)og på tilsvarende måde arrangerer regressorene i en matrix,Φ =
2
6
4
ϕT1...
ϕTN
3
7
5(13.77)kan situationen også beskrives ved:
YN = Φθ + e (13.78)hvor vektoren e indeholder støjsekvensen.13.2.1 ELS-EstimastionI (13.75) og (13.78) har vi bragt modelbeskrivelsen på samme form som for ARX-modellerne.Det er derfor naturligt at estimere parametrene med en estimator af samme udseende.Problemet er blot, at en del af regressorene, nemlig et−i, i = 1, ..., nc, er ukendte. Detantages at y−i, i = 0, ..., na−1 og u−i, i = 0, ..., nb−1 kendes, hvilket kun kun er et spørgsmålom denition af origo (t=0). En måde, hvorpå problemet med et−i kan omgås, er at estimerestøjsignalet og anvende det estimerede signal, som om det var det korrekte signal ( ertaintyequivalen e). Udfaldet af residualsekvensen, εt, hvor:εt = yt − ϕ
Tt θ (13.79)er et estimat for støjrealisationen, når θ er et estimat af systemparametrene. Estimatet af
εt afhænger imidlertid af estimatet af systemparametrene, θ. Estimatet af parametrene måfølgelig bestemmes iterativt. Denne metode kalde udvidet mindstekvadraters metode ellerblot ELS (Extended Least Squares), hvilket naturligvis skyldes dens nære slægtskab medLS-metoden. At udvide metoderne fra LS eller den lineære regression har en vid udbredelse.De metoder, der kan opfattes som en (ad ho ) udvidelse af den lineære regression kaldesogså for PLR-metoder (Pseudo Lineær Regression). ELS-metoden er altså et spe ialtilfældeaf PLR-metoderne.

392 13.2 ARMAX-StrukturenSætning: 13.7 ELS-estimatoren for θ i modellen (13.75) er givet som løsningen til iteratio-nerne:θn+1 =
h
ΦTn Φn
i−1
ΦTnY (13.80)under forudsætning af at ΦT
n Φn er inverterbar. 2Bemærk, at Φn afhænger af θn, idet εt = ε(t, θ) indgår i regressionsvektoren. Iterationernekan også udtrykkes på formen:θn+1 =
"
NX
i=1
ϕiϕTi
#−1
×NX
i=1
ϕiyi (13.81)eller hvis vi indfører (13.79):θn+1 = θn +
"
NX
i=1
ϕiϕTi
#−1
×NX
i=1
ϕiεi (13.82)hvor:εt = yt − ϕ
Tt θn (13.83)Bemærk, at ELS estimatet på sluttet form kan skrives som:
θ = sol
(
NX
i=1
ϕiεi = 0
) (13.84)hvor sol angiver løsningen (solution) til ligningssystemet. Denne skrivemåde kan anvendesved sammenligning med IV og LS estimatorerne.Eksempel: 13.5 Betragt følgende system:yt + ayt−1 = et + cet−1 (13.85)hvor |a| < 1, og hvor et er en andenordens pro es. Her er:
θ =
„
ac
«
ϕt =
„
−yt−1
et−1
« (13.86)og dermed er iterationerne givet ved:θn+1 =
2
6
4
PNi=1 y2
i−1 −PN
i=1 yi−1εi−1
−PN
i=1 yi−1εi−1PN
i=1 ε2i−1
3
7
5
−1
×
2
6
4
−PN
i=1 yi−1yi
PNi=1 εi−1yi
3
7
5(13.87)og residualerne, der indgår som regressorer, estimeres ud fra:
εt = yt − ϕTt θn = yt − anyt−1 − cnεt−1 (13.88)
2

13.2.2 ML-Estimation 393Bemærk, at:PN =
1
N
NX
i=1
ε2i ×
"
NX
i=1
ϕiϕTi
#−1 (13.89)kan anvendes som estimat af variansen for estimationsfejlen.Som det fremgår af ovenstående er ELS-metoden meget enkel. Til gengæld er dens konver-gensegenskaber ikke så sikre som ML-estimatet, som vi vil betragte i det følgende.13.2.2 ML-EstimationVi har nu set hvorledes parametrene i et dynamisk system, der er på ARMAX - formen, kanestimeres ved hjælp af en ad ho udvidelse af LS - metoden. Lad os nu studere maximumlikelihood estimation af systemparametre, når systemet er givet ved (13.71) og hvor eter en sekvens af uafhængige F(0, σ2)-fordelte stokastiske variable. Det antages desuden affordelingen (d.v.s. typen) af modelfejlen, et, kendes. Lad som i det forrige Yt betegne envektor indeholdende målesignaler (af yt og ut) fra 1 til t. I afsnit 13 om ML-estimation afparametre i ARX-modeller fandt vi generelt (sætning 13.3), at ML-estimatoren kan skrivessom:θ = argmin
θJN (θ) JN =
1
2
NX
i=1
ρ(εi) (13.90)ρ(ε) = −log(fe(ε|θ)) εt = yt − yt|t−1,θ (13.91)Gælder der spe ielt, at et er N(0, σ2)-fordelt, er ρ (jvf. forrige afsnit) kvadratisk i εt (menikke nødvendigvis i θ). Lad os nu se hvorledes εt kan beregnes i ARMAX-tilfældet. Det kanlet vises (jvf. 7.75) at (ettrins) prædiktionsfejlen, εt, opfylder:
εt =1
C
h
Ayt − q−kBut
i
= yt − ϕTt θ (13.92)Det ses heraf at for C 6= 1 er εt ikke lineær i parametrene. Vi er nu i stand til at opskriveML-estimatoren for det gaussiske tilfælde.Sætning: 13.8 ML-estimatoren for parametrene i (13.71), hvor et er en sekvens af uaf-hængige N(0, σ2)-fordelte stokastiske variable, kan bestemmes som:
θ = argminθ
(
NX
i=1
1
2ε2t
) (13.93)hvor εt er givet ved (13.92). Størrelsen:σ
2 =1
N
NX
i=1
ε2i (13.94)er et ML-estimat for σ2. 2
394 13.2 ARMAX-StrukturenMetoden involverer først en minimering af tabsfunktionen, JN , med en passende søgepro e-dure (se f.eks. appendix I). Tabsfunktionen i det fundne minimum kan anvendes til estima-tion af σ2.Lad os nu vende os mod, hvordan vi beregner estimatet, hvilket i praksis vil sige, hvordan viminimerer tabsfunktionen. Der eksisterer utallige metoder til dette og vi vil her kun betragteen af de mest simple. Vi tager udgangspunkt i Newton-Raphson metoden, der er beskrevet iappendix I. Vi bemærker først, at tabsfunktionen, (13.90), er additiv. Vi kan derfor anvendealgoritmen, der er angivet i appendix I. Lad os imidlertid først indføre vektoren:ψt = −∇θεt = ∇θy(t|t− 1, θ) (13.95)der angiver i hvilken retning prædiktionsfejlen ændres ved en ændring af θ. Med notationenfra appendix I kan man bestemme θ med iterationen:
θn+1 = θn −H−1n gn (13.96)hvor:
gn =NX
s=1
∇θρ(s, θ) Hn =NX
s=1
∇2θρ(s, θ) (13.97)Da nu:
ρ(εt) =1
2ε2t εt = yt − y(t|t− 1, θ) (13.98)kan det let indses at:
gn = −NX
s=1
ψtεt Hn =NX
s=1
ψtψTt − (∇θψt)εt (13.99)Hvis det sidste led i udtrykket for Hn ikke inkluderes i beregningerne kan ML-estimatetndes med iterationen:
θn+1 = θn +
"
NX
i=1
ψiψTi
#−1
×NX
i=1
ψiεi (13.100)Denne iteration kan sammenlignes med (13.18) fra ARX-modellerne. Lad os nu vende osmod hvorledes ψt beregnes. Idet:Cεt = Ayt − q
−kBut (13.101)er:
C∂
∂ai
εt = yt−i
C∂
∂biεt = −ut−i−k
εt−i + C∂
∂ciεt = 0

13.2.2 ML-Estimation 395og dermed er:ψt =
1
C(q−1)ϕt (13.102)Bemærk at ELS- og ML-estimaterne har præ is samme struktur, blot er ψt en ltreretversion af regressorene i ϕt (jvf. (13.102)).Eksempel: 13.6 Antag, at der er forelagt et system givet ved:
(1 − 1.66q−1 + 0.83q−2)yt + q−1(0.9 + 0.085q−1)ut + (1 + 0.8q−1 + 0.4q−2)et (13.103)hvor et er en sekvens af uafhængige N(0, σ2)-fordelte stokastiske variable. Styresignalet ellerinput signalet er et PRBS signal.0 50 100 150 200 250
-40
-20
0
20
40
y
t
0 50 100 150 200 250
-1
0
1
u
tFigur 13.3. Simulation af systemet i (13.103).Vi estimerer først parametrene i en ARX-model:(1 + a1q−1 + a2q−2)yt = q−1(b0 + b1q−1)ut + et (13.104)og nder:>>ns=[2 2 1;>>th=arx([y u,ns);>>present(th)This matrix was reated by the ommand ARX on 10/26 1993 at 8:54Loss f n: 1.55 Akaike`s FPE: 1.6 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.7713 -0.11450 0.0791 0.0813A = 1.0000 -1.7493 0.91790 0.0223 0.0223

396 13.3 L-strukturen>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-1.7493 0.0574 -1.8067 -1.69190.9179 0.0573 0.8606 0.97530.7713 0.2038 0.5675 0.9751-0.1145 0.2095 -0.3240 0.0950Det bemærkes at estimatet af a-parametrene falder udenfor 99% kondens intervallet, hvilket ikkeer helt unaturligt eftersom vi har valgt en forkert struktur. Vi forsøger nu med en ARMAX-strukturaf korrekt orden.>>ns=[2 2 2 1;>>th=armax([y u,ns);>>present(th)This matrix was reated by the ommand ARMAX on 10/26 1993 at 8:54Loss f n: 1.013 Akaike`s FPE: 1.063 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.8349 -0.01310 0.0601 0.0628A = 1.0000 -1.6547 0.83800 0.0366 0.0362C = 1.0000 0.7366 0.33360 0.0654 0.0657>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-1.6547 0.0944 -1.7490 -1.56030.8380 0.0932 0.7448 0.93120.8349 0.1547 0.6802 0.9896-0.0131 0.1618 -0.1749 0.14860.7366 0.1684 0.5682 0.90500.3336 0.1692 0.1644 0.5028Det fremgår af resultatlistningen at de korrekte parametre ligger indenfor 99% kondensintervallet.213.3 L-strukturenLad os nu vende os mod estimation i den generelle L-modelstruktur. De resulterende metoderer meget generelle og har ere klassiske metoder som spe ialtilfælde. Det skal i den forbin-

397delse nævnes, at den generelle struktur kan omformes til et spe ialtilfælde, f.eks. ARMAXstrukturen.Antag, at det forelagte system er givet ved:Ayt = q
−kB
Fut +
C
Det + d (13.105)hvor:
A(q−1) = 1 + a1q−1 + · · · + anaq
−na
B(q−1) = b0 + b1q−1 + · · · + bnb
q−nb
C(q−1) = 1 + c1q−1 + · · · + cncq
−nc
F (q−1) = 1 + fu1 q
−1 + · · · + fnfq−nf
D(q−1) = 1 + de1q
−1 + · · · + dndq−ndFor at lette mellemregningerne indfører vi følgende signaler:
yut =
B
Fut−k y
et =
C
Det = Ayt − B
Fut−k − d (13.106)Hvis vi anvender følgende tri k har vi at:
yut =
B
Fut−k = But−k +
B
Fut−k −But−k = But−k + (1 − F )
B
Fut−k
= But−k + (1 − F )yutog på samme måde at:y
et = Cet + (1 −D)ye
t (13.107)Vi kan altså skrive (13.105) på formen:yt = (1 −A)yt +But−k + (1 − F )yu
t
+(C − 1)et + (1 −D)yet + d
+eteller somyt = ϕ
Tt θ + et (13.108)hvor:
ϕt = (−yt−1, ..., ut−k, ...,−yut−1, ..., et−1, ...,−ye
t−1, ..., 1)T (13.109)
θ = (a1, ..., b0, ..., f1, ..., c1, ..., d1, ..., d)T (13.110)Det er nu klart, hvorledes vi i forlængelse af metoderne LS (og ELS) kan estimere parame-trene i (13.105).

398 13.3 L-strukturenSætning: 13.9 En PLR-estimator for parametrene i (13.105) er givet som løsningen af ite-rationen:θn+1 =
"
NX
i=1
ϕiϕTi
#−1
×NX
i=1
ϕiyi (13.111)eller direkte ved:θ = sol
(
NX
i=1
ϕiεi = 0
)
εt = yt − ϕTt θn
2Bemærk, at ere af regressorerne er ukendte og må for eres vedkommende estimeres ved atltrere kendte signaler gennem ltre, der afhænger af systemparametrene der også estimeres.Følgende forslag er et blandt mange:y
ut = q
−k B
Fut y
et = Ayt − y
ut − d
et =D
Cy
et = εtDet bemærkes ligeledes, at iterationenen til bestemmelse af PLR-estimatoren også kan skri-ves som:
θn+1 = θn +
"
NX
i=1
ϕiϕTi
#−1
×NX
i=1
ϕiεi (13.112)Til vurdering af usikkerheden på estimatet kan følgende approximative estimat anvendes:PN =
1
N
NX
i=1
ε2i ×
"
NX
i=1
ϕiϕTi
#−1 (13.113)13.3.1 PEM-estimationLad os nu betragte ML estimation af parametre i den generelle model. Antag nu, at eter en sekvens af uafhængige N(0, σ2)-fordelte stokastiske variable. Vi kan da igen anvendesætning 3.8, hvor estimatet er givet ved (13.54), dvs.:θ = argmin
θ
(
1
2
NX
t=1
ε2t
) (13.114)

13.3.1 PEM-estimation 399Minimeringen i (13.114) kan udføres med adskillige metoder. Vi vil i det følgende betragteen metode, der er baseret på Newton-Raphson iterationer (jvf. appendix I). Det kan visesat ettrins prædiktionen for yt (jvf. (7.75) er givet ved:CF yt = F (C − AD)yt +BDut + FDd (13.115)hvor yt = yt|t−1,θ og hvor argumenterne til polynomierne er udeladt for overskuelighedensskyld. Denne rekursion, (13.115), kan anvendes til bestemmelse af gradienten til prædik-tionsfejlen, dvs. til bestemmelse af:
ψt = ∇θ yt = −∇θεt (13.116)Det kan efter nogle simple men arbejdssomme manipulationer vises at:ψt = (−yt−1, ..., ut, ...,−yu
t−1, ..., et−1, ...,−yet−1, ..., δ)
T (13.117)hvor:yt =
D
Cyt ut =
D
CFut y
ut = − D
CFy
ut
et =1
Cεt y
et = − 1
Cy
et δ =
D
C1ML-estimatet kan bestemmes som løsning til iterationen:
θn+1 = θn +
"
NX
i=1
ψiψTi
#−1
×NX
i=1
ψiεi (13.118)Til vurdering af estimatets usikkerhed kan følgende approximation anvendes:PN =
1
N
NX
i=1
ε2i ×
"
NX
i=1
ψiψTi
#−1 (13.119)Eksempel: 13.7 Antag, at der er forelagt et system givet ved:(1 − 1.66q−1 + 0.83q−2)yt = q−1 0.9 + 0.085
1 + 0.5q−1ut +
1 + 0.8q−1 + 0.4q−2
1 − 0.8q−1et (13.120)hvor et er en sekvens af uafhængige N(0, σ2)-fordelte stokastiske variable. Styresignalet ellerinput signalet er et PRBS signal. Signalerne er vist i gur 13.4.Det skal bemærkes at i resultatlistningen er AU =F og Ae =D.>>ns=[2 2 2 1 1 1;>>th=pem([y u,ns);>>present(th)This matrix was reated by the ommand PEM on 10/26 1993 at 9:11Loss f n: 0.9737 Akaike`s FPE: 1.038 Sampling interval 1The polynomial oeffi ients and their standard deviations areB =
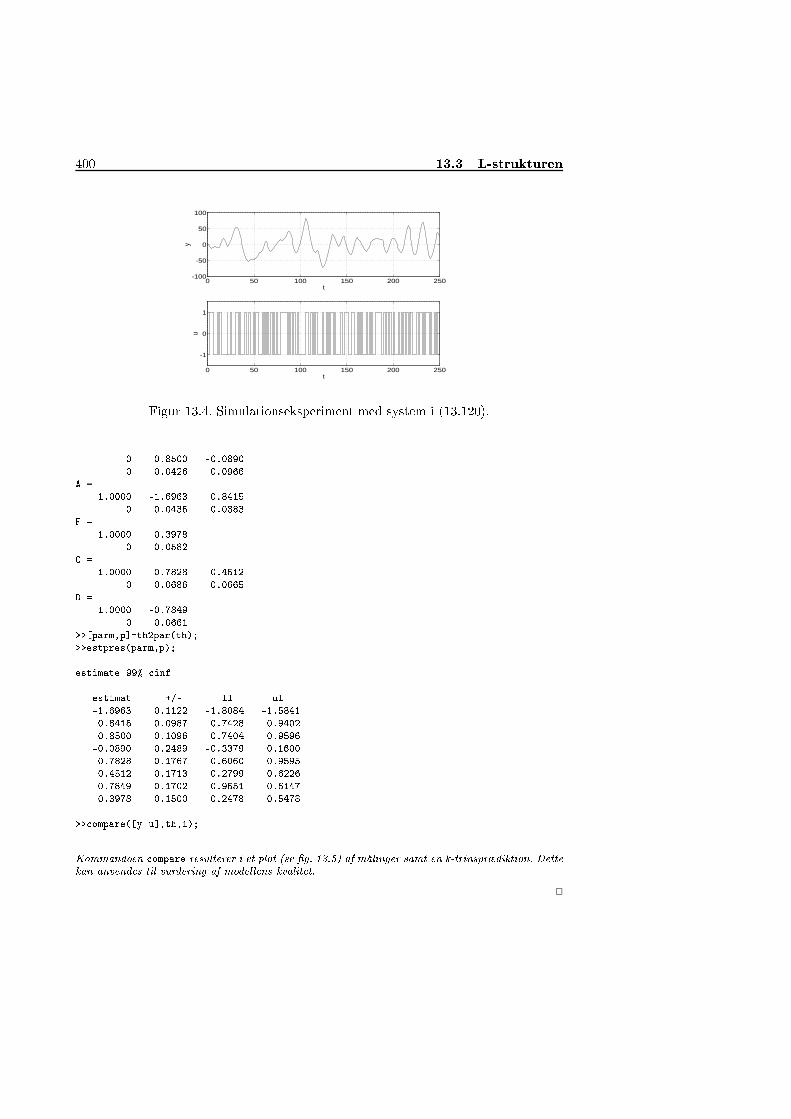
400 13.3 L-strukturen0 50 100 150 200 250
-100
-50
0
50
100
y
t
0 50 100 150 200 250
-1
0
1
u
tFigur 13.4. Simulationseksperiment med system i (13.120).0 0.8500 -0.08900 0.0426 0.0966A = 1.0000 -1.6963 0.84150 0.0435 0.0383F = 1.0000 0.39780 0.0582C = 1.0000 0.7828 0.45120 0.0686 0.0665D = 1.0000 -0.78490 0.0661>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-1.6963 0.1122 -1.8084 -1.58410.8415 0.0987 0.7428 0.94020.8500 0.1096 0.7404 0.9596-0.0890 0.2489 -0.3379 0.16000.7828 0.1767 0.6060 0.95950.4512 0.1713 0.2799 0.6226-0.7849 0.1702 -0.9551 -0.61470.3978 0.1500 0.2478 0.5478>> ompare([y u,th,1);Kommandoen ompare resulterer i et plot (se g. 13.5) af målinger samt en k-trinsprædiktion. Dettekan anvendes til vurdering af modellens kvalitet.2

13.3.1 PEM-estimation 401
0 50 100 150 200 250-80
-60
-40
-20
0
20
40
60
80
100
Figur 13.5. Pro eduren ompare kan anvendes til at sammenligne målinger med k-trinsprædiktioner. Her er ettrinsprædiktionen anvendt.
402 13.3 L-strukturen

Kapitel 14Parameterestimation - InternemodellerI de tidligere kapitler har vi beskæftiget os med metoder til at estimere parametre i eksternemodeller. I dette kapitel vil vi fokusere på metoder til bestemmelse af parametre i internesystembeskrivelser eller state spa e modeller.Det antages at det forelagte system kan beskrives med følgende model:xt+1 = Φxt + Γut + vt vt ∈ Fiid(0, R1σ
2)yt = ϕ
Txt + ∆ut + et et ∈ Fiid(0, R2σ
2)hvor:xt0 ∈ F(m0, P0) (14.1)dvs. det aktuelle system er et linært, tidsinvariant system af endelig dimension. I det generelletilfælde vil de ukendte parametre kunne indgå i alle størrelser der karakteriserer beskrivelsen.Dvs. at parametrene dels kan indgå i systemmatri erne (systemvektorerne for det skalaretilfælde):
Φ = Φ(θ) Γ = Γ(θ) ϕ = ϕ(θ) ∆(θ) (14.2)og dels kan indgå i varians matri erne:R1 = R1(θ) R2 = R2(θ) σ
2 = σ2(θ) (14.3)og endelig kan parametrene indgå i initial betingelsen
m0 = m0(θ) P0 = P0(θ) (14.4)Det forudsættes at parametriseringen er valgt således at estimatet er entydigt. Vi vil senerekomme tilbage til hvad dette udsagn indebærer.403

404 14.2 ML-metoden14.1 LS-metodenLad os indledningsvis antage at der gælder deterministiske forhold for pro esligningen. Dvs.at det aktuelle system kan beskrives af følgende:xt+1 = Φxt + Γut xt0 = x0 (14.5)yt = ϕ
Txt + ∆ut + et (14.6)Her kan de ukendte størrelser være parametre i systemmatri erne Φ,Γ, ϕ,∆ samt indgå isystemets initialtilstand, x0. Dvs. at:
Φ = Φ(θ) Γ = Γ(θ) ϕ = ϕ(θ) ∆(θ) x0 = x0(θ) (14.7)Hvis der anvendes en mindste kvadraters metode bestemmes estimaterne således at kriteriet:J =
NX
t=t0
ε2t εt = yt − yt(θ) (14.8)er minimal. I kriteriet er yt målinger, mens yt er opnået som løsning til den determistiskedel af (14.6) og som således afhænger af θ. Til minimering af (14.8) kan der f.eks. anvendesen numerisk minimeringspro edure som f. eks. Matlab rutinen fmins.Til metodens fordele hører at den giver entrale estimater, selv når et ikke er hvid. Metodener baseret på en høj grad af tiltro til beskrivelsen af tilstandsvariablene. Det betyder atlængden af de datasekvenser der anvendes til estimationen af parametrene i modellen erbegrænset.14.2 ML-metodenSom tidligere nævnt i forbindelse med ML-estimation i ARX-modeller gælder sætning 13.2og 13.3 generelt uafhængig af strukturen. Dvs. at ML-estimatet kan bestemmes som:
θ = argminθ
−NX
t=1
log (f(yt|Yt−1, θ))
! (14.9)Lægges en normalfordelingsantagelse til grund for estimationen gælder der atyt|Yt−1, θ ∈ N(yt|t−1, Qt|t−1) (14.10)og estimatet kan ndes som minimum til:
J =
NX
t=1
„
1
2log(Det[Qt|t−1]) +
1
2log(2π) +
1
2ε
Tt Q
−1t|t−1εt
« (14.11)

405hvor:εt = yt − yt|t−1 (14.12)og:
yt|t−1 = ϕTxt|t−1 + ∆ut Qt|t−1 = ϕ
TPt|t−1ϕ+R2 (14.13)Størrelserne xt|t−1 og Pt|t−1 er givet ved kalmanlteret, her formuleret i den prædiktiveversion:
xt+1 = Φxt + Γut +Kt[yt − ϕTxt] xt0 = m0
Kt = ΦPtϕ+R12 [ϕTPtϕ+R2]
−1
Pt+1 = [Φ −KtϕT ]PtΦ
T +R1 −KtRT12 Pt0 = P0Kriteriefunktionen kan minimeres med en numerisk optimerings algoritmeUdvidelse: 19 Hvis der tages udgangspunkt i en tidskontinuert beskrivelse, hvor tilstandeneudvikles efter (tc ∈ R)
xtc = A(θ)xtc + B(θ)utc + vtc vtc ∈ N(0, R1(θ)) (14.14)(se 10 for en nærmere tolkning af denne stokastiske dierentialligning) og hvor udgangen til diskretetidspunkter aftastes (samples), dvs.yt = C⊤(θ)xtTs + et et ∈ N(0, R2(θ) (14.15)
214.3 EKF-metodenI forbindelse med estimation af parametre i dynamiske systemer er det vigtigt at kendeparametrenes regressorer. Det er rent faktisk kun i ARX-tilfældet at dette problem har enlet løsning. I de este tilfælde må vi estimere (eller ltrere) regressorene. Det er muligt atanlægge den anskuelse at regressorene er tilstande i den aktuelle modelstruktur. Problemetbestår ret beset i simultant at estimere tilstande (regressorer) og parametre. EKF-metoden(Extended Kalman Filter) er baseret på en omformning af de simultane estimationsproblemtil et estimationsproblem vedrørende en udvidet tilstandesvektor (extended), der indeholderbåde egentlige tilstande og parametre.Antag, at den ulineære systembeskrivelse er givet på følgende form:xt+1 = f(xt, ut, θ, ζt, t) ζt ∈ F(0,Σ1) (14.16)yt = g(xt, ut, θ, ξt, t) ξt ∈ F(0,Σ2) (14.17)hvor ζt og ξt på sædvanlig vis er pro es- og målestøj. Dvs., at de er hvide sekvenser afstokastiske variable, der er ukorrelerede med xs for s ≤ t. Hvis parametrene ikke er konstante,men driver kan dette modelleres som:
θt+1 = θt + ηt ηt ∈ F(0,Σ3) (14.18)hvor ηt er hvid støj. Den samlede beskrivelse kan lineariseres:
xt+1
θt+1
ff
=
»
∇xf ∇θf
0 I
–
xt
θt
ff
+
∇uf
0
ff
ut +
»
∇ζf 00 I
–
ζt
ηt
ff (14.19)

406 14.3 EKF-metodenyt =
`
∇xgT ∇θg
T´
xt
θt
ff
+ ∇ugTut + ∇ξg
Tξt (14.20)Hvis parametrene θ spe ielt er konstante, er ηt ≡ 0. Lad os indføre følgende størrelser:
Φ =
∇xf ∇θf
0 I
ff
ϕT =
`
∇xgT ∇θg
T´ (14.21)
R1 =
„
∇ζfΣ1(∇ζf)T 00 Σ3
«
R12 =
„
∇ζfΣ12(∇ξg)T
0
« (14.22)R2 = ∇ξg
T Σ2∇ξ (14.23)hvor, det er antaget, at der ikke er nogen kovarians mellem pro estøj, ζt, og den støj, derdriver parametervariationen.Det er muligt, (jvf 7.7) at opskrive et kalmanlter for denne lineariserede beskrivelse, hvorvedman samtidigt estimerer systemtilstandene og de ukendte parametre. Et sådant kalmanlterer i sin prædiktive udgave givet ved:
xt+1
θt+1
ff
=
f(xt, ut, θt)
θt
ff
+Kt[yt − g(xt, utθt)] (14.24)hvor:Kt =
`
ΦPtϕ+ R12
´
h
ϕTPtϕ+ R2
i−1 (14.25)Pt+1 = [Φ −Ktϕ
T ]PtΦT + R1 −KtR
T12 (14.26)I forhold til afsnit 7.7 er der her valgt en anden approximation i udviklingen af estima-tet. Der er her i forbindelse med parameterestimation valgt den ulineære sammenhæng fortilstandsestimatet. Dvs. at:
Ext+1|Yt−1 = Ef(xt, ut, θ, ζt, t)|Yt−1 ≃ f(xt, ut, θ, 0, t) (14.27)
Kapitel 15ModelvalideringSom tidligere angivet er identikationspro essen en iterativ pro edure, hvor man må væreindstillet på at returnere til udgangspunktet og ændre de grundliggende antagelser. Ideelt setbestår en modelvalidering i at undersøge om hvorvidt en model er korrekt. I virkelighedensverden er en korrekt modelstruktur og en korrekt model abstraktioner. Modelvalideringer praksis nærmere en undersøgelse af, om modellen er rimelig set i relation til data fradet aktuelle system. Modelvalidering kan således opfattes som en kvalitetstest,som modellen skal opfylde inden den ultimative test, nemlig anvendelsen, bliverforetaget.Gennem identikationspro essen foretages en lang række af valg. F.eks. foretages en bestem-melse af modellens struktur inden parametrene i modellen bestemmes (estimeres). Dette kanvære sket ud fra a priori viden. I så fald er det vigtigt at undersøge om hvorvidt denne videner korrekt. Valget kan også være truet som et led i en iterativ pro es, hvor der er et samspilmellem modelvalideringen og de valg der skal træes gennem hele identikationspro essen.Den iterative pro es, som systemidentikation består af, kan således opfattessom en metode til at bestemme (estimere) strukturparametre o.a.Den ultimative evaluering af en models kvalitet er selvfølgelig at anvende den til dens formål.Dette kan være både dyrt og kompli eret - og farligt. Der er derfor - og bl.a. af sikkerheds-mæssige årsager - udviklet metodikker til at afsløre modstrid mellem model og virkelighed. Idet efterfølgende er der angivet en række forskellige metoder til at validere en model. Valgetaf metode skal naturligvis afspejle den konkrete anvendelse, dvs. være følsom overfor dekarakteristika, som er vigtige for den aktuelle anvendelse.Modelvalidering kan dels foretages ved at analysere den resulterende model (modelverika-tion) og ved at analysere det som modellen ikke beskriver, dvs. resten eller residualerne.407

408 15.1 Modelverikation15.1 ModelverikationEn estimation resulterer i tre dele: 1) estimatet (θ), 2) dettes usikkerhed (estimatets varians-matrix, P ), samt 3) det som modellen ikke beskriver, nemlig residualsekvensen, εt. Undermodelverikation undersøges det om modellens interne logik er korrekt. Dvs. det undersøges,om der i den resulterende model er åbenlyse fejl.15.1.1 Marginale test i parametreHovedresultatet af en estimation er først og fremmest estimatet af parametrene samt usik-kerheden heraf, dvs.:θ ∈ F(θ, P ) (15.1)Det første spørgsmål, der melder sig er, om alle parametre er signikante, dvs. er signi-kant forskellig fra nul. Indledningsvis kan hver parameter undersøges og testes om den ersignikant. Under en normalfordelingsantagelse (der kun er asymptotisk korrekt) gælder derat:
θi ∈ N(θi, Pi,i) (15.2)Den pågældende parameter er signikant, hvis teststørrelsen, θi, falder i det kritiske område:|θi| > f
u1− α
2×p
Pi,i (15.3)hvor fux angiver x-fraktilen i N(0, 1)-fordelingen. Idet variansmatri en er estimeret gældermere korrekt at:
z1 =θi
p
Pi,i
∈ t(M − dp) (15.4)hvor dp er antallet af parametre og M er antallet af observationer, der ligger til grund forestimatet. Det kritiske område er givet ved:|θi| > f
t1− α
2(M − dp) ×
p
Pi,i (15.5)hvor f tx angiver x-fraktilen i t-fordelingen. For store værdier af M (i forhold til dp) kan deri stedet approximativt anvendes en normaldeling, dvs. (15.3).Eksempel: 15.1 I følgende eksempel er der estimeret parametre i en ARX-model med na = 4,
nb = 3, k = 1 dvs. ns = (4, 4, 1). Der estimeres na + nb + 1 = 8 parametre. Som tidligere nævntudskriver estprres kommandoen estimaterne, samt deres 99% kondensinterval. Vi er dermed istand til hurtigt at udføre en test i om hvorvidt de enkelte parametre marginalt er signikante (dvs.er signikant forskellig fra nul).>>present(th)This matrix was reated by the ommand ARX on 10/25 1993 at 13:59Loss f n: 1.546 Akaike`s FPE: 1.648 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.9914 1.0777 0.7099 0.12520 0.0795 0.0963 0.1023 0.0951A =

15.1.2 Modelreduktion 4091.0000 -0.5433 -0.3380 -0.0705 0.41610 0.0545 0.0633 0.0633 0.0458>>[parm,p=th2par(th);>>estpres(parm,p);estimate 99% infestimat +/- ll ul-0.5433 0.1403 -0.6836 -0.4030-0.3380 0.1631 -0.5011 -0.1749-0.0705 0.1631 -0.2336 0.09260.4161 0.1180 0.2981 0.53410.9914 0.2048 0.7866 1.19621.0777 0.2481 0.8296 1.32570.7099 0.2635 0.4464 0.97340.1252 0.2451 -0.1199 0.3703Ud fra denne sekvens af marginale tests kan det formodes at 2 parametre er insignikante. 2Man kan ikke i al almindelighed slutte ud fra en serie af marginale test om hvorvidt et givetantal parametre simultant er insignikante. Dette skyldes at estimaterne er korrelerede. Ladet antal parametre være samlet i θb, dvs. at:θ =
„
θa
θb
«
∈ N
„»
θa
θb
–
,
»
Pa Pab
P Tab Pb
–« (15.6)Til test i om et antal parametre simultant er insignikante (dvs. H0: θb = 0) kan teststør-relsen:zb = θbP
−1b θb ∈ F (m,M − dp) under H0 (15.7)anvendes. Alle parametre er signikante hvis teststørrelsen falder i det kritiske område somer givet ved:zb > f
F1−α(m,M − dp) (15.8)Sædvanligvis er M så stor at der approximativt kan anvendes en χ2(m) fordeling istedet foren F−test.15.1.2 ModelreduktionHvis, det er tilfældet at et antal parametre er insignikante, kan modellen redu eres vedhjælp af projektionssætningen 3.19 fra den statistiske basis. Lad de insignikante parametrevære samlet i θb. Der gælder (betinget datasekvensen) at:
»
θa
θb
–
∈ N
„»
θa
θb
–
,
»
Pa Pab
P Tab Pb
–« (15.9)Der gælder i såfald at:θa|θb = 0 ∈ N
“
ˆθa, Pa
” (15.10)hvor:ˆθa = θa − PabP
−1b θb Pa = Pa − PabP
−1b P
Tab (15.11)
410 15.1 Modelverikation15.1.3 Singulærværdianalyse af variansmatri en PDe este estimationsmetoder er relateret til løsning af et ligningsystem at typen:Hθ = g (15.12)hvor H er et mål for den i data liggende informationsmængde. Dette kan f.eks. være tilfæl-det i forbindelse med en prædiktionsfejlsalgoritme, når der anvendes en Newton-Raphsoniteration. Det kan også være tilfældet ved en korrelationsmetode såsom en PLR-metode elleren IV-metode. Under alle omstændigheder resulterer de este metoder med et estimat afparametrene samt et skøn over dettes usikkerhed i form af (en estimeret) variansmatrix, P .Ved en overparametrisering, dvs. modellen indeholder ere parametre end det virkelige sy-stem, er det (under en idealiseret situation) ikke muligt at bestemme estimaterne, fordi H ersingulær. Under mindre idealiserede forhold (f.eks. under ikkedetermistiske forhold) kan Hinverteres (resultatet er som bekendt P -matri en), men har et antal egenværdier, der er småsammenlignet med ertallet af egenværdier. Hvis en egenværdi til P -matri en er stor (dentilsvarende egenværdi til H vil være lille) er det en indikation for at en linearkombination(angivet ved den tilhørende egenvektor) af parametrene er meget ringe bestemt antydendeat modellen er overparametriseret (eller at systemet ikke er tilstrækkeligt eksiteret).En singulærværdianalyse vil således give information om hvilke linearkombinationer af pa-rametre der er bestem med ringe præ ision. Antag at egenværdierne (samt tilhørende egen-vektorer) for P -matri en er bestemt. Eksisterer der egenværdier der er markant større endet repræsentativt udsnit, vil de tilsvarende egenvektorer angive hvilke parameterkombina-tioner, der er ringe bestemt, og derfor sandsynligvis ikke er signikante i beskrivelsen afsystemet (under forudsætning af at systemet er tilstrækkeligt eksiteret).Eksempel: 15.2 Lad os fortsætte eksempel 15.1. I forbindelse med en overparametrisering vilet antal linearkombinationer af parametre være meget dårligt bestemt. Dette giver sig til udtryk vedat P -matri en har et antal egenværdier, der er relativt store. De tilsvarende egenvektorer angiverhvilke linearkombinationer der er ringe bestemt. Dette forhold vil faktisk forværres med stigendesignal-støj niveau.Nedenstående listning er opnået med en ARX-model, der har en parameter mere end det datagene-rerende system, der er et andenordens ARX-system. Matlab kommandoen [v,d=eig(p1) resultererto kvadratiske matri er v og d, hvor d er en diagonalmatrix indeholdende egenværdierne til p1. Detilsvarende egenvektorer er arrangeret som søjler i matri en v således at p1*v=d*v;ns=[3 2 1;th=arx([y u,ns);[parm,p1=th2par(th);[v,d=eig(p1);vv = 0.4305 0.5618 -0.7028 -0.0074 0.0707-0.7241 0.6105 0.0124 0.0854 -0.30930.3657 0.5582 0.6963 -0.0859 0.24980.0004 0.0026 0.0194 0.9625 0.27070.3958 -0.0102 0.1438 0.2428 -0.8739dd =

15.1.4 Konditionstal 4110.0111 0 0 0 00 0.0000 0 0 00 0 0.0000 0 00 0 0 0.0001 00 0 0 0 0.0001Det bemærkes at en af egenværdierne (0.0111) er markant større end de øvrige. Det betyder atlinearkombinationen:θv ≃ 0.43θ1 − 0.72θ2 + 0.36θ3 + 0.39θ5 (15.13)er relativt dårligt bestemt. Bemærk, at egenvektorene er normeret til længden 1. Vælges nu enanden modelstruktur, der er identisk med den korrekte, fås følgende resultater.ns=[2 2 1;th=arx([y u,ns);[parm,p=th2par(th);[v,d=eig(p);vv =-0.3828 0.7089 0.5924 0.00010.3611 0.7050 -0.6103 0.0038-0.0585 0.0014 -0.0393 -0.9975-0.8483 -0.0199 -0.5244 0.0704dd =1.0e-03 *0.3275 0 0 00 0.0055 0 00 0 0.0891 00 0 0 0.1858 ond(p)ans =59.6094Det bemærkes, at den absolutte usikkerhed ikke er så stor som i tilfældet med overparametrisering.
215.1.4 KonditionstalKonditionstallet for en matrix har forskellige denitioner. Normalt er konditionstallet de-neret som forholdet mellem største og mindste singulær værdi. For en reel symmetriskmatrix (som P -matri en) er det samme som det absolutte forhold mellem største og mind-ste egenværdi. Hvis konditionstallet for en matrix er stort, er det et udtryk for at visselinearkombinationer af parametre er meget usikre i forhold til andre kombinationer. En be-stemmelse af P -matri ens konditionstal er således en indikator for om hvorvidt modellen eroverparametriseret.Eksempel: 15.3 Lad os fortsætte eksempel 15.1. Konditionstallet for P-matri en fra eksempel15.1 kan bestemmes i Matlab med kommandoen ond.
412 15.1 Modelverikationns=[3 2 1;th=arx([y u,ns);[parm,p1=th2par(th); ond(p1)ans =4.9699e+03Lad os nu forsøge med en korrekt modelstruktur.ns=[2 2 1;th=arx([y u,ns);[parm,p=th2par(th);[v,d=eig(p); ond(p)ans =59.6094Det ses at konditionstallet er meget stort i forbindelse med overparametrisering. Det skal dog iagt-tages at denne eekt er aftagende med stigende støjniveau. 215.1.5 Sammenfaldende Nulpunkter og PolerHvis modellen er overparametriseret vil det erfaringsmæssigt give sig til udtryk i at over-føringsfunktionerne, Hy,u(z) og Hy,e(z), vil indeholde nulpunkter og poler, der næsten ersammenfaldende. Udgangspunktet er:θ ∈ N(θ, P ) (15.14)Poler og nulpunkter afhænger af systemets parametre, dvs.:
pi = fi(θ) ≃ fi(θ) + ∇θfpi θ θ ∈ N(0, P ) (15.15)og tilsvarende for nulpunkter. Dermed gælder approximativt at:
pi ∈ N“
pi,∇θfpi P [∇θf
pi ]⊤” (15.16)Det er således muligt i den komplekse plan at optegne (et estimat for) poler og nulpunk-ter, samt deres (f. eks.) 99% kondensintervaller. En rimelig indikator for et nulpunkt-polsammenfald er deres kondenselipser har et fælles mængde, der ikke er tom.Eksempel: 15.4 I dette eksempel vil vi betragte et andenordens ARX-system:
(1 − 1.5q−1 + 0.7q−2)yt = q−1(1 + 0.5q−1)ut + et (15.17)der er påvirket af et PRBS-signal som inputsignal og af en sekvens et af uafhængige N(0, 0.32)-fordelte stokastiske variable. Der estimeres parametre i en fjerdeordens ARX-model:(1 + a1q−1 + · · · + a4q−4)yt = q−1(b0 + · · · + b3q−3)ut + et (15.18)
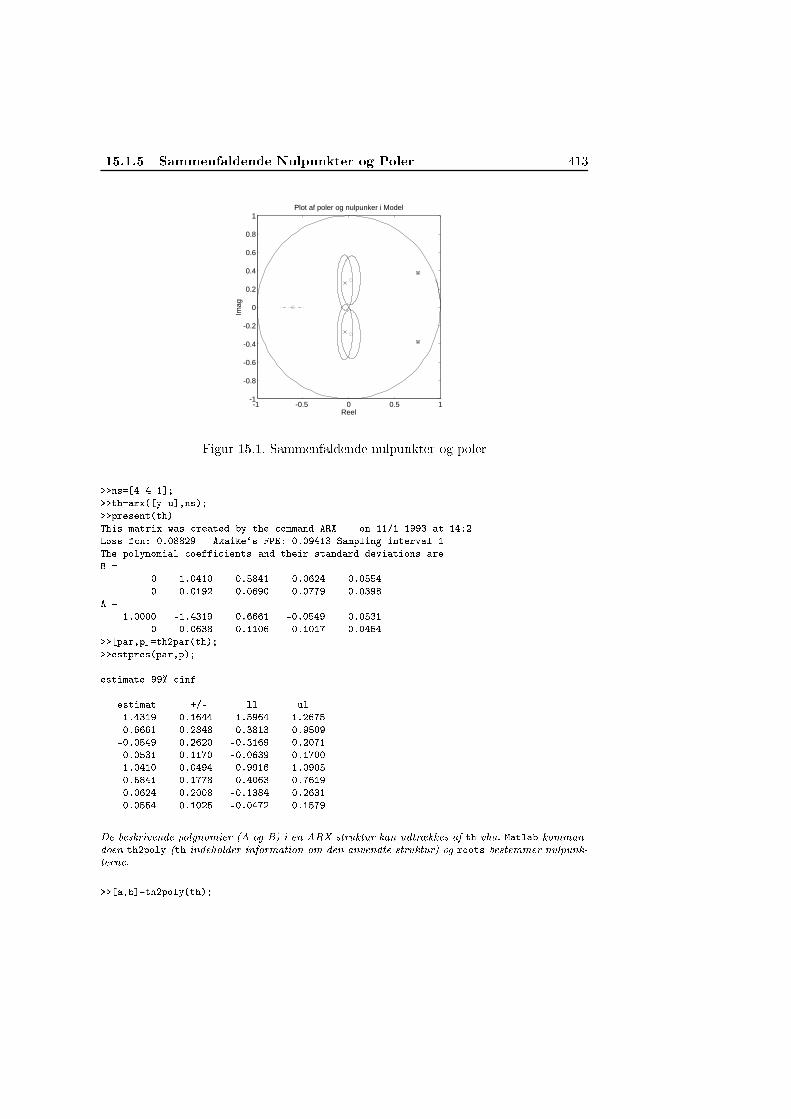
15.1.5 Sammenfaldende Nulpunkter og Poler 413
-1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Reel
Imag
Plot af poler og nulpunker i Model
Figur 15.1. Sammenfaldende nulpunkter og poler>>ns=[4 4 1;>>th=arx([y u,ns);>>present(th)This matrix was reated by the ommand ARX on 11/1 1993 at 14:2Loss f n: 0.08829 Akaike`s FPE: 0.09413 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 1.0410 0.5841 0.0624 0.05540 0.0192 0.0690 0.0779 0.0398A = 1.0000 -1.4319 0.6661 -0.0549 0.05310 0.0638 0.1106 0.1017 0.0454>>[par,p=th2par(th);>>estpres(par,p);estimate 99% infestimat +/- ll ul-1.4319 0.1644 -1.5964 -1.26750.6661 0.2848 0.3813 0.9509-0.0549 0.2620 -0.3169 0.20710.0531 0.1170 -0.0639 0.17001.0410 0.0494 0.9916 1.09050.5841 0.1778 0.4063 0.76190.0624 0.2008 -0.1384 0.26310.0554 0.1025 -0.0472 0.1579De beskrivende polynomier (A og B) i en ARX-struktur kan udtrækkes af th vha. Matlab komman-doen th2poly (th indeholder information om den anvendte struktur) og roots bestemmer nulpunk-terne.>>[a,b=th2poly(th);

414 15.2 Residualanalyse>>roots(a)ans =0.7563 + 0.3765i0.7563 - 0.3765i-0.0403 + 0.2697i-0.0403 - 0.2697i>>roots(b)ans =-0.60670.0228 + 0.2951i0.0228 - 0.2951iDenne analyse antyder at to nulpunkter og to poler er tæt på plombering. For at afgøre om de ersammenfaldende, dvs. modellen er overparametriseret må vi inddrage usikkerheden på estimaternei overvejelserne. I nedenstående uddrages denne information fra th og kommandoen zpplot plotterpoler og nulpunkter samt deres 99% kondensinterval (idet fu0.995 = 2.5758).>>zepo=th2zp(th);>>zpplot(zepo,2.5758);Plottet af poler og nulpunkter samt deres 99% kondensinterval er angivet i gur 15.1. 2Hvis der anvendes en prædiktionsfejlsalgoritme, der fokuserer på højfrekvensdelen af model-len, vil disse sammenfaldende nulpunkter og poler (under forudsætning af at modelstruktu-ren tillader det) være at nde i et område omkring 1.15.2 ResidualanalyseI forbindelse med validering af en model melder der sig primært et spørgsmål; nemlig omhvorvidt den resulterende model i rimeligt omfang beskriver den datagenererende virkelig-hed. Hvordan rimelig skal forstås afhænger først og fremmest af den konkrete anvendelse afmodellen. Det primære spørgsmål spaltes hurtigt i to underliggende spørgsmål.1. Er modellen for kompleks (overparametriseret).2. Er modellen for simpel (underparametriseret).De tidligere test og undersøgelser fokuserer i første omgang på problematikken omkringoverparametrisering (en for kompleks modelstruktur). En undersøgelse af en eventuel under-parametrisering af modellen tager naturligt udgangspunkt i det som modellen ikke forklarer;nemlig residualsekvensen. Hvis modellen er perfekt vil residualsekvensen være informations-løs. Det vil i en deterministisk sammenhæng betyde, at den er identisk nul, mens den i enstokastisk sammenhæng betyder, at den er hvid.Residualanalyse er imidlertid ikke kun relevant i forbindelse med modellering eller syste-midentikation. I forbindelse med tidligere kapitler vedrørende ltrering og regulering erdet et gennemgående resultat at en fejlsekvens har visse statistiske egenskaber. I de estetilfælde er fejlsekvensen (typisk en ettrinsprædiktionsfejl) hvid og i visse tilfælde er den en
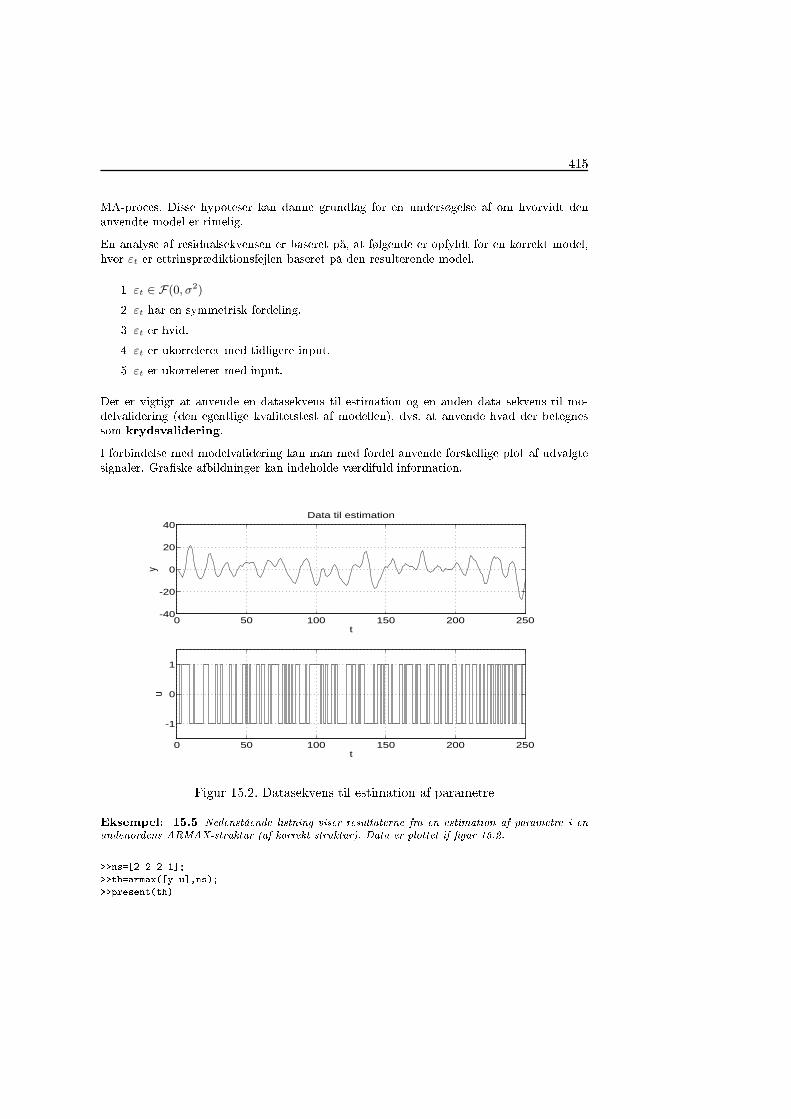
415MA-pro es. Disse hypoteser kan danne grundlag for en undersøgelse af om hvorvidt denanvendte model er rimelig.En analyse af residualsekvensen er baseret på, at følgende er opfyldt for en korrekt model,hvor εt er ettrinsprædiktionsfejlen baseret på den resulterende model.1 εt ∈ F(0, σ2)2 εt har en symmetrisk fordeling.3 εt er hvid.4 εt er ukorreleret med tidligere input.5 εt er ukorreleret med input.Det er vigtigt at anvende en datasekvens til estimation og en anden data sekvens til mo-delvalidering (den egentlige kvalitetstest af modellen), dvs. at anvende hvad der betegnessom krydsvalidering.I forbindelse med modelvalidering kan man med fordel anvende forskellige plot af udvalgtesignaler. Graske afbildninger kan indeholde værdifuld information.0 50 100 150 200 250
-40
-20
0
20
40
y
t
Data til estimation
0 50 100 150 200 250
-1
0
1
u
tFigur 15.2. Datasekvens til estimation af parametreEksempel: 15.5 Nedenstående listning viser resultaterne fra en estimation af parametre i enandenordens ARMAX-struktur (af korrekt struktur). Data er plottet if gur 15.2.>>ns=[2 2 2 1;>>th=armax([y u,ns);>>present(th)

416 15.2 Residualanalyse0 50 100 150 200 250
-20
-10
0
10
20
y
t
Data til test
0 50 100 150 200 250
-1
0
1
u
tFigur 15.3. Datasekvens til test af modelThis matrix was reated by the ommand ARMAX on 10/29 1993 at 10:22Loss f n: 0.8467 Akaike`s FPE: 0.8884 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.7995 0.13630 0.0537 0.0567A = 1.0000 -1.6225 0.79510 0.0403 0.0403C = 1.0000 0.8086 0.44100 0.0640 0.0636I gur 15.3 er testdata plottet. Det er som tidligere nævnt vigtigt, når modelvalidering anvendessom kvalitetstest, at anvende et datasæt til estimation og et andet til validering. Kommandoen ompare kan, som i gur 15.4 anvendes til at sammenligne testdata med (her ettrins) prædiktioneraf modellen.>> ompare([y1 u1,th,1);Selve residualsekvensen εt, forskellen mellem testdata og ettrinsprediktioner kan udtrækkes medkommandoen pe ( predi tion error) og plottes (gur 15.5) for inspektion og senere statistiske un-dersøgelser.>>res=pe([y u,th);>>plot(res)2

15.2.1 Test i middelværdi og varians 417
0 50 100 150 200 250-20
-15
-10
-5
0
5
10
15
20Output # 1 Fit: 0.9189
Red/solid: Model output, Green/dashed: Measured outputFigur 15.4. Sammenligning af resultater fra model og målinger15.2.1 Test i middelværdi og variansHvis modellen er korrekt vil der gælde at:εt ∈ F(0, σ2) (15.19)dvs. at middelværdien af εt er nul og at variansen er konstant. En af de indledende under-søgelser kunne da være at undersøge om dette er korrekt. En test i (H0)om middelværdiener nul har et kritisk område, der i normalfordelingstilfældet er givet ved:
|X| > t1− α2(M − 1)
r
S2
M(15.20)hvor:
X =1
M
MX
i=1
εi S2 =
1
M − 1
MX
i=1
(εi − X)2 (15.21)Denne test er mere udførligt beskrevet i (Conradsen 1979a). Testen kan med fordel foreta-ges på ere forskellige delsekvenser for at afsløre eventuelle tidsvariantioner. Lad der væregivet to (ikke overlappende) delsekvenser af residualer, hver med længden M1 og M2, hen-holdsvis. Der er i de indledende statistiske fag angivet (se f.eks. (Conradsen 1979a)) en langrække tests, der kan være relevante (test i om de to delsekvenser har samme middelværdifor ukendte varianser, test i om de to delsekvenser har samme varians for ukendte og for-skellige middelværdier). Sædvanligvis falder ovenstående test ud til fordel for hypotesen omat middelværdien er konstant nul (i modsat fald vil en ny modelstruktur blive formuleret).
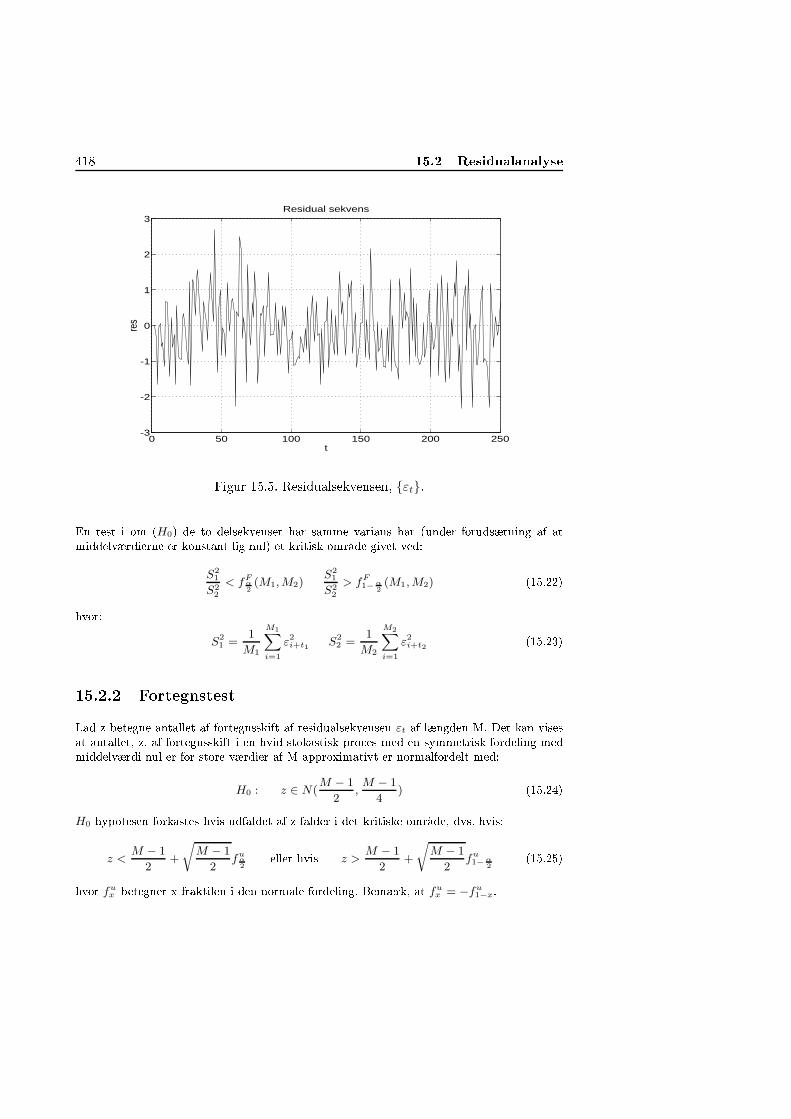
418 15.2 Residualanalyse
0 50 100 150 200 250-3
-2
-1
0
1
2
3Residual sekvens
res
tFigur 15.5. Residualsekvensen, εt.En test i om (H0) de to delsekvenser har samme varians har (under forudsætning af atmiddelværdierne er konstant lig nul) et kritisk område givet ved:S2
1
S22
< fFα2(M1,M2)
S21
S22
> fF1− α
2(M1,M2) (15.22)hvor:
S21 =
1
M1
M1X
i=1
ε2i+t1 S
22 =
1
M2
M2X
i=1
ε2i+t2 (15.23)15.2.2 FortegnstestLad z betegne antallet af fortegnsskift af residualsekvensen εt af længden M. Det kan visesat antallet, z, af fortegnsskift i en hvid stokastisk pro es med en symmetrisk fordeling medmiddelværdi nul er for store værdier af M approximativt er normalfordelt med:
H0 : z ∈ N(M − 1
2,M − 1
4) (15.24)
H0 hypotesen forkastes hvis udfaldet af z falder i det kritiske område, dvs. hvis:z <
M − 1
2+
r
M − 1
2f
uα2
eller hvis z >M − 1
2+
r
M − 1
2f
u1− α
2(15.25)hvor fu
x betegner x fraktilen i den normale fordeling. Bemærk, at fux = −fu
1−x.

15.2.3 Test i kovariansfunktion 41915.2.3 Test i kovariansfunktionHvis εt er en hvid støjsekvens med middelværdi nul gælder der at:rε(τ ) = Eεt+τεt =
σ2 for τ = 00 ellers (15.26)Nu er vi imidlertid kun i stand til at estimere kovariansfunktionen
rτ =1
M
M−τX
t=1
εt+τεt (15.27)og det er nødvendigt at kende dette estimats usikkerhed for at kunne foretage en test i omhvorvidt (H0) εt er en hvid støjsekvens med middelværdi nul. Det kan vises (se. f.eks.(Söderström & P. Stoi a 1989) p.424) at under H0 gælder der at:rτ → rε(τ ) for M → ∞ (15.28)Lad r betegne en vektor indeholdende m estimater af kovariansfunktionen, dvs.:
r =
0
B
B
B
@
r1r2...rm
1
C
C
C
A
(15.29)Det kan vises (se. f.eks. (Söderström & P. Stoi a 1989) p.424) at under H0 gælder at rasymptotisk er normalfordelt med:r ∈ N(0, σ4
I) (15.30)For store værdier af M kan vi approximativt anvende de asymptotiske resultater. Marginaltgælder der (approximativt) at:H0 :
√Mrτ
r0∈ N(0, 1) (15.31)Dette kan bruges til marginalt at teste om rε(τ ) = 0 for hver værdi af τ . Lad ρ = rτ
r0da erdet kritiske område givet ved:
ρτ <fu
α2√M
eller ρτ >fu1− α
2√M
(15.32)Testen udføres let grask ved at plotte rτ og sammenligne med vandrette liniery = ±
fu1− α
2√M
(15.33)Nu er det imidlertid ikke så interessant om rε(τ ) er nul i individuelle punkter, men omhvorvidt kovariansfunktionen er nul overalt (undtagen i nul). Vi har at:H0 : z = M
mX
i=1
ρ2i ∈ χ
2(m) (15.34)
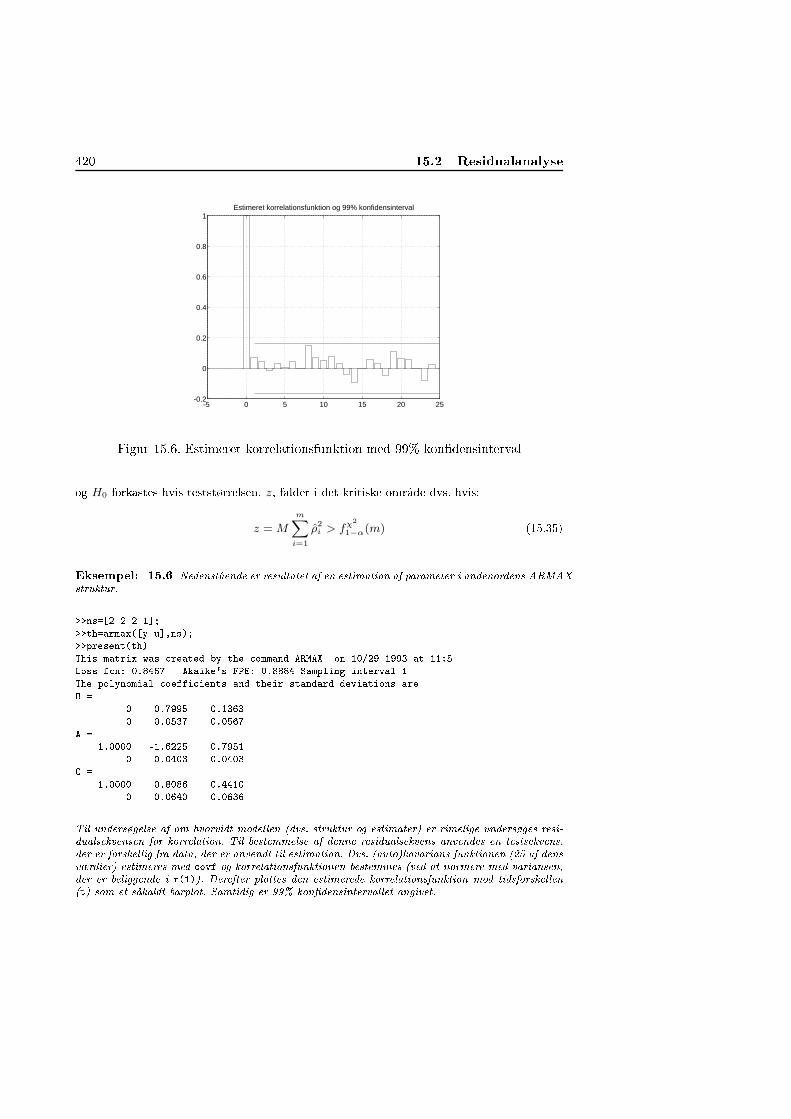
420 15.2 Residualanalyse
-5 0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1Estimeret korrelationsfunktion og 99% konfidensinterval
Figur 15.6. Estimeret korrelationsfunktion med 99% kondensintervalog H0 forkastes hvis teststørrelsen, z, falder i det kritiske område dvs. hvis:z = M
mX
i=1
ρ2i > f
χ2
1−α(m) (15.35)Eksempel: 15.6 Nedenstående er resultatet af en estimation af parameter i andenordens ARMAX-struktur.>>ns=[2 2 2 1;>>th=armax([y u,ns);>>present(th)This matrix was reated by the ommand ARMAX on 10/29 1993 at 11:5Loss f n: 0.8467 Akaike`s FPE: 0.8884 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.7995 0.13630 0.0537 0.0567A = 1.0000 -1.6225 0.79510 0.0403 0.0403C = 1.0000 0.8086 0.44100 0.0640 0.0636Til undersøgelse af om hvorvidt modellen (dvs. struktur og estimater) er rimelige undersøges resi-dualsekvensen for korrelation. Til bestemmelse af denne residualsekvens anvendes en testsekvens,der er forskellig fra data, der er anvendt til estimation. Dvs. (auto)kovarians funktionen (25 af densværdier) estimeres med ovf og korrelationsfunktionen bestemmes (ved at normere med variansen,der er beliggende i r(1)). Derefter plottes den estimerede korrelationsfunktion mod tidsforskellen(t) som et såkaldt barplot. Samtidig er 99% kondensintervallet angivet.

421>>res=pe([y1 u1,th);>>r= ovf(res,25);>>r=r/r(1);>>bar(t,r)215.3 Test i krydskovariansfunktionenUnder hypotesen H0: at εt er hvid støj med middelværdi nul, er krydskovariansen mellemresidual og inputsignal, ut lig nul, dvs.:
rε,u(τ ) = Eεt+τut = 0 (15.36)Krydskovariansfunktionen kan estimeres med:rεu(τ ) =
1
M
M−τX
i=1
εt+τut (15.37)hvor det er forudsat at den pågældende sum eksisterer. Lad os igen arrangere estimaterne ien vektor:rεu =
0
B
B
B
@
rεu(1)rεu(2)...rεu(m)
1
C
C
C
A
(15.38)Lad endvidere:Ru = lim
M→∞
1
M
MX
t=1
E
0
B
B
B
@
ut−1
ut−2...ut−m
1
C
C
C
A
`
ut−1 ut−2 · · · ut−m
´
(15.39)Det kan under H0 vises, at der asymptotisk gælder at:rεu ∈ N(0, Ru) (15.40)og dermed at:
1
rε(0)r
TεuR
−1u rεu ∈ χ
2(m) (15.41)Ladρεu =
rεu(τ )p
rε(0)ru(0)(15.42)Marginalt, dvs. for hver enkelt værdi af τ er:
√Mρεu(τ ) ∈ N(0, 1) (15.43)
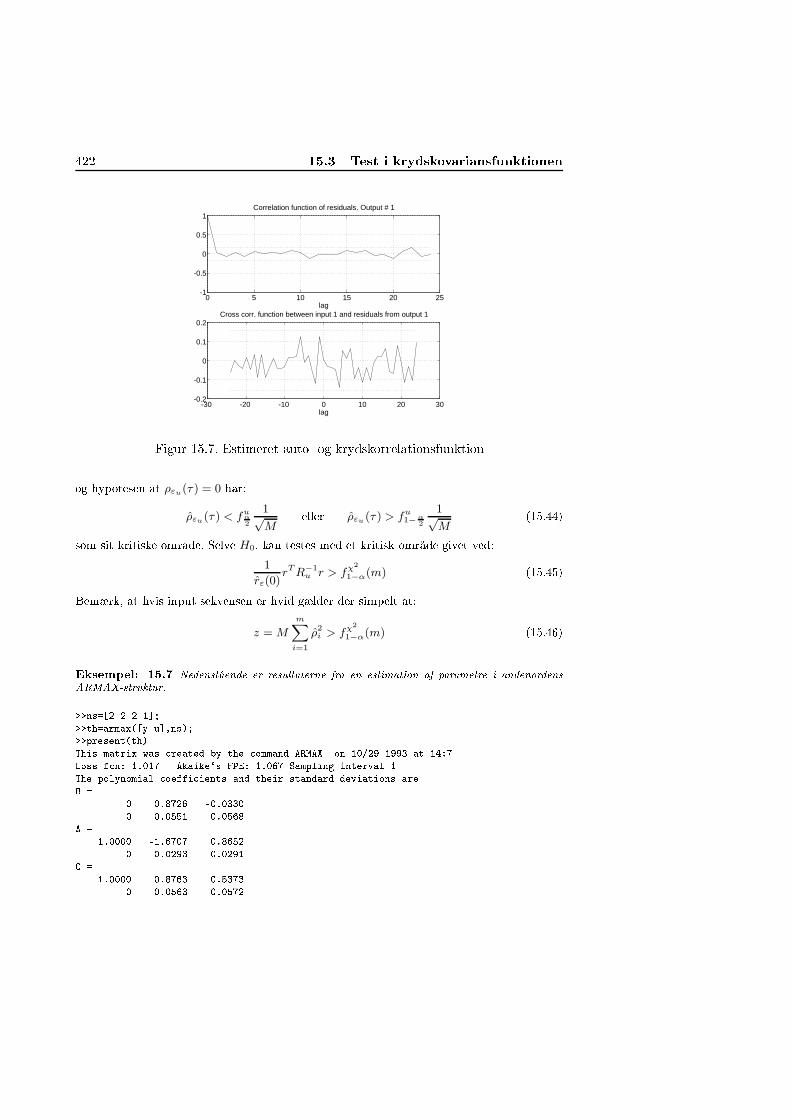
422 15.3 Test i krydskovariansfunktionen
-30 -20 -10 0 10 20 30-0.2
-0.1
0
0.1
0.2Cross corr. function between input 1 and residuals from output 1
lag
0 5 10 15 20 25-1
-0.5
0
0.5
1Correlation function of residuals. Output # 1
lag
Figur 15.7. Estimeret auto- og krydskorrelationsfunktionog hypotesen at ρεu(τ ) = 0 har:ρεu(τ ) < f
uα2
1√M
eller ρεu(τ ) > fu1− α
2
1√M
(15.44)som sit kritiske område. Selve H0, kan testes med et kritisk område givet ved:1
rε(0)r
TR
−1u r > f
χ2
1−α(m) (15.45)Bemærk, at hvis input sekvensen er hvid gælder der simpelt at:z = M
mX
i=1
ρ2i > f
χ2
1−α(m) (15.46)Eksempel: 15.7 Nedenstående er resultaterne fra en estimation af parametre i andenordensARMAX-struktur.>>ns=[2 2 2 1;>>th=armax([y u,ns);>>present(th)This matrix was reated by the ommand ARMAX on 10/29 1993 at 14:7Loss f n: 1.017 Akaike`s FPE: 1.067 Sampling interval 1The polynomial oeffi ients and their standard deviations areB = 0 0.8726 -0.03300 0.0551 0.0568A = 1.0000 -1.6707 0.86520 0.0293 0.0291C = 1.0000 0.8763 0.53730 0.0563 0.0572

15.3.1 Test i spektraltæthed 423Til hvidhedstest af residualsekvensen anvendes et testdatasæt. Ved hjælp af kommandoen resid esti-meres (auto)korrelations funktionen for residualsekvensen εt samt krydskorrelations funktionenmellem εt og inputsignal ut. Disse estimerede funktioner er angivet i gur 15.7 sammen med ettilsvarende 99% (marginalt) kondensinterval.>>resid([y1 u1,th);215.3.1 Test i spektraltæthedEt alternativ til at udføre hvidhedstesten i tidsdomænet er at udføre den i frekvensdomainet,dvs. udføre testen i forbindelse med den spektrale tæthed. Dette emne er behandlet i (Box& Jenkins 1976) og i (Jenkins & Watts 1968).Antag, at xt er signal, for hvilket, den fouriertransformerede eksisterer. Lad X(ω) betegneden diskrete Fouriertransformerede af xt, hvor:
X(ω) =1
M
MX
t=1
xtejωt (15.47)Vi kan begrænse os til den diskrete Fouriertransformerede af xt,
X(ωk) =1
M
MX
t=1
xtejωkt (15.48)hvor ωk = 2πk
M, k = 1, ...M . X(ωk) kan let bestemmes med Matlab`s fft. Signalets perio-gram,
Ck = |X(ωk)|2 = X(ωk)X(ωk)∗ (15.49)kan estimeres med Matlabs etfe-pro edure. Det kan vises, at periogrammet opfylder at:ECk = 2σ2 (15.50)når xt er hvid støj.15.3.2 Test i fordelingFordelingen af residualerne kan beregnes og testet for normalitet, dvs. testet om residualernestammer fra en normalfordeling. Dette kan baseres på det empiriske histogram for residu-alerne. Observationerne grupperes i m klasser svarende til m intervaller resulterende i etfrekvenshistogram. Lad fi betegne den observerede frekvens i klasse i og lad Fi betegne dentilsvarende forventede værdi (bemærk, at der her er estimeret en middelværdi og varians).Da gælder approximativt at:
H0 : z =mX
i=1
(fi − Fi)2
Fi
∈ χ2(m− 2) (15.51)

424 15.4 Test mellem modeller15.4 Test mellem modellerTest mellem modeller er en af de mange metoder der eksisterer til at teste om en modelsstruktur er korrekt. Ideelt set skal der anvendes to forskellige datasekvenser til estimation ogtil validering. Der eksisterer dog metoder til test mellem modeller der er baseret på sammedatasekvens.15.4.1 ForklaringsgradTil at vurdere om en given model i tilstrækkelig grad forklarer de foretagne observationer,anvendes ofte forklaringsgraden, der er deneret ved:R
2 =J0 − J(θ)
J0hvor:J0 =
MX
i=1
1
2y2i J(θ) =
MX
i=1
1
2ε2iI visse sammenhæng er det praktisk at anvende kvadratsummen:,
W (θ) =MX
i=1
ε2i eller WM (θ) =
1
M
MX
i=1
ε2i (15.52)15.4.2 F-testenI den statistiske basis så vi (jvf sætning 3.34) at tabsfunktionen (evalueret på estimations-sekvensen) er en ikke voksende funktion af antallet af parametre i modellen. Antag, at
M∞ ∈ M∈ (dvs. at alle modeller i M∞ er indeholdt i M∈). Dette vil spe ielt sige, atantallet af parametre, d1 i M∞ er mindre end eller lig d2. Antag, at der eksisterer en mo-delstruktur, der indeholder den korrekte systembeskrivelse og lad d0 betegne antallet afparametre i denne modelstruktur. Hypotesen, d2 > d1 ≥ d0, eller, S ∈ M∞ ∈ M∈, kanapproximativt testes med størrelsen:H0 : z =
J1 − J2
J2× M − d2
d2 − d1∈ F (d2 − d1,M − d2) (15.53)Dvs. hypotesen forkastes hvis:
z > fF1−α(d2 − d1,M − d2) (15.54)Bemærk, at teststørrelsen alternativt kan udtrykkes i W eller i WM . Verbalt formulerettester vi om reduktionen i tabsfunktionen ved at øge modelkompleksiteten er insignikant.Eksempel: 15.8 Dette eksempel vedrører bestemmelsen af ordenerne af de beskrivevende poly-nomier i en ARX-struktur. I tabel 15.8 er angivet sammenhængende værdier mellem modelstrukturgivet ved:
ns = (na, 1 + nb, k), (15.55)
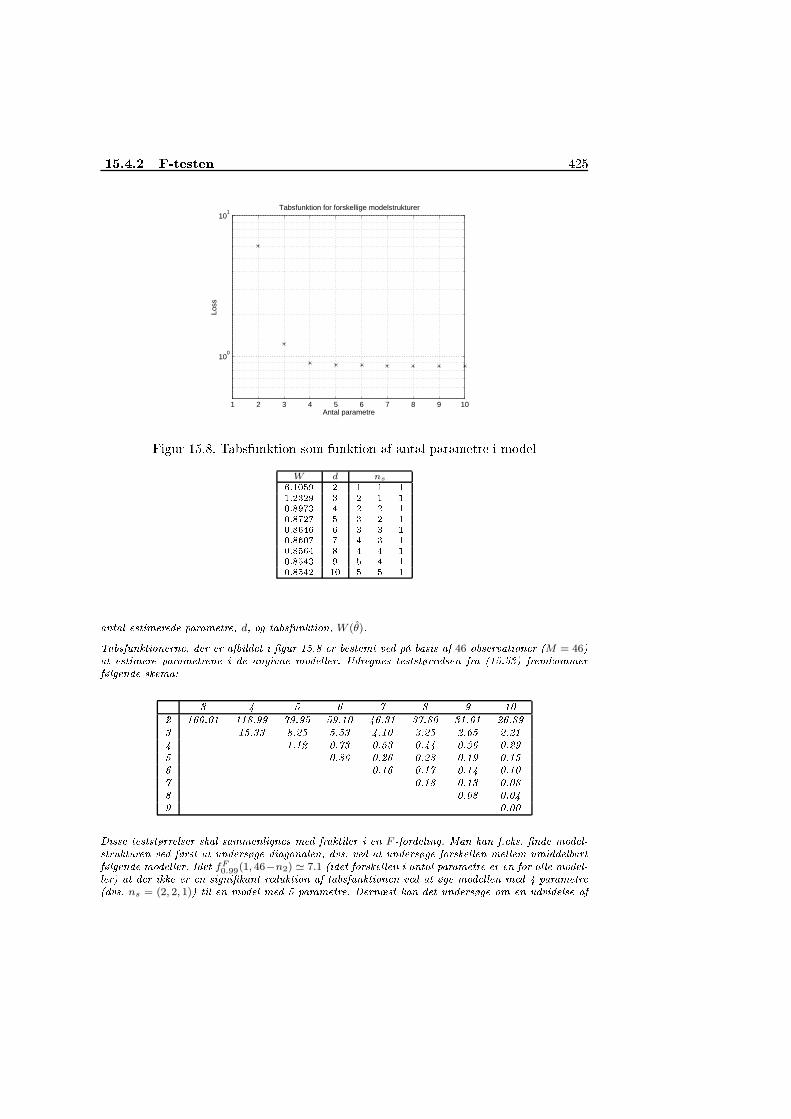
15.4.2 F-testen 425
1 2 3 4 5 6 7 8 9 10
100
101
Tabsfunktion for forskellige modelstrukturerLo
ss
Antal parametreFigur 15.8. Tabsfunktion som funktion af antal parametre i modelW d ns6.1059 2 1 1 11.2329 3 2 1 10.8973 4 2 2 10.8727 5 3 2 10.8646 6 3 3 10.8607 7 4 3 10.8564 8 4 4 10.8543 9 5 4 10.8542 10 5 5 1antal estimerede parametre, d, og tabsfunktion, W (θ).Tabsfunktionerne, der er afbildet i gur 15.8 er bestemt ved på basis af 46 observationer (M = 46)at estimere parametrene i de angivne modeller. Udregnes teststørrelsen fra (15.53) fremkommerfølgende skema: 3 4 5 6 7 8 9 102 166.01 118.99 79.95 59.10 46.31 37.80 31.61 26.893 15.33 8.25 5.53 4.10 3.25 2.65 2.214 1.12 0.73 0.53 0.44 0.36 0.295 0.36 0.26 0.23 0.19 0.156 0.16 0.17 0.14 0.107 0.18 0.13 0.088 0.08 0.049 0.00Disse teststørrelser skal sammenlignes med fraktiler i en F -fordeling. Man kan f.eks. nde model-strukturen ved først at undersøge diagonalen, dvs. ved at undersøge forskellen mellem umiddelbartfølgende modeller. Idet fF
0.99(1, 46−n2) ≃ 7.1 (idet forskellen i antal parametre er en for alle model-ler) at der ikke er en signikant reduktion af tabsfunktionen ved at øge modellen med 4 parametre(dvs. ns = (2, 2, 1)) til en model med 5 parametre. Dernæst kan det undersøge om en udvidelse af
426 15.4 Test mellem modellerdenne model giver en ikke signikant reduktion af tabsfunktionen. 215.4.3 InformationskriterierSom tidligere nævnt vil tabsfunktionen være en aftagende funktion af modelkompleksite-ten f.eks. målt med antallet af parametre. En klasse af teknikker tager udgangspunkt i enændret kriteriefunktion, hvori der er indføjet forskellige led der er voksende med modelkom-pleksiteten. Ved anvendelse af disse metoder bestemmes den korrekte modelstruktur somet minimum til informationskriteriet. Metoderne hviler på et teoretisk grundlag, men skalvi kun refererer resultaterne. (se f.eks. (Ljung 1987), (Söderström & P. Stoi a 1989) eller(Davis & Vinter 1985)).AICDet mest velkendte informationskriterium er nok AIC (Akaike's Information theoreti Cri-terion) der er givet ved:AIC =
„
1 +2d
M
«
WM (15.56)(Det skal bemærkes at der i litteraturen eksisterer andre denitioner, hvilket skyldes atder i visse tilfælde arbejdes med logaritmen til ovenstående). Det er erfaringsmæssigt at enbestemmelse af en modelstruktur ud fra AIC sædvanligvis vil føre til en modelstruktur meden for høj modelkompleksitet (for mange parametre).BICDet Bayesianske information kriterium (BIC) eller Rissanen's Minimum Des ription Length(MDL) er givet ved:BIC =
„
1 +log(M)d
M
«
WM (15.57)Det bemærkes at vægten på modelkompleksiteten er større end i AIC tilfældet.FPEEt tredie kriterium er det såkaldte FPE (Akaike's Final Predi tion Error riterion) givetved:FPE =
M + d
M − dWM (15.58)Dette kriterium udtrykker variansen af prædiktionsfejlen, når den opnåede model anvendespå en anden datasekvens. Bemærk, at FPE er approximerer AIC for M >> d. Bemærk, atdet netop er dette informationkriterium, der udskrives med Matlab kommandoen present.
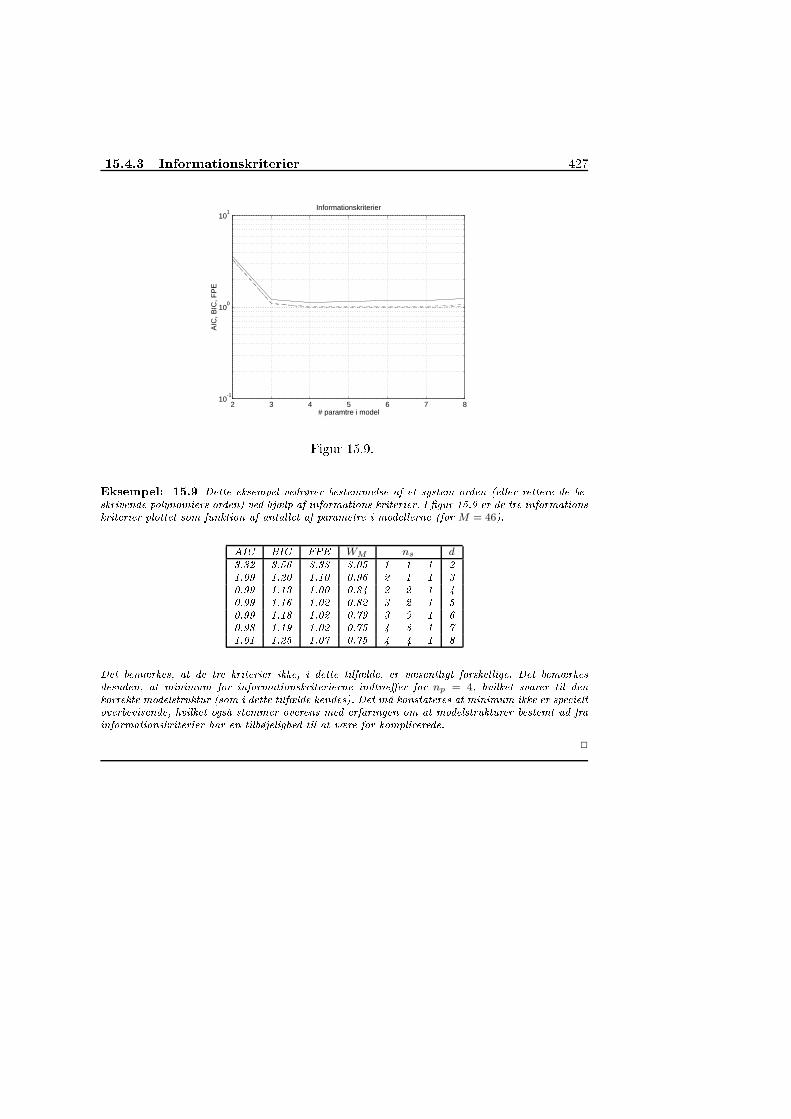
15.4.3 Informationskriterier 427
2 3 4 5 6 7 810
-1
100
101
InformationskriterierA
IC, B
IC, F
PE
# paramtre i modelFigur 15.9.Eksempel: 15.9 Dette eksempel vedrører bestemmelse af et system orden (eller rettere de be-skrivende polynomiers orden) ved hjælp af informations kriterier. I gur 15.9 er de tre informationskriterier plottet som funktion af antallet af parametre i modellerne (for M = 46).AIC BIC FPE WM ns d3.32 3.56 3.33 3.05 1 1 1 21.09 1.20 1.10 0.96 2 1 1 30.99 1.13 1.00 0.84 2 2 1 40.99 1.16 1.02 0.82 3 2 1 50.99 1.18 1.02 0.79 3 3 1 60.98 1.19 1.02 0.75 4 3 1 71.01 1.25 1.07 0.75 4 4 1 8Det bemærkes, at de tre kriterier ikke, i dette tilfælde, er væsentligt forskellige. Det bemærkesdesuden, at minimum for informationskriterierne indtræer for np = 4, hvilket svarer til denkorrekte modelstruktur (som i dette tilfælde kendes). Det må konstateres at minimum ikke er spe ieltoverbevisende, hvilket også stemmer overens med erfaringen om at modelstrukturer bestemt ud frainformationskriterier har en tilbøjelighed til at være for kompli erede.2
428 15.4 Test mellem modeller
Kapitel 16Rekursiv EstimationI de tidligere kapitler har vi betragtet generelle metoder til estimation af parametre i dyna-miske systemer. De resulterende algoritmer var hovedsagelig af ikkerekursiv natur, d.v.s. atestimatet er givet som en direkte funktion af alle t datapunkter.θt = funkYt (16.1)En sådan algoritme er natuligvis ikke særlig operationel i en adaptiv regulator. Det erderimod en rekursiv metode, hvor estimatet er funktion af det forrige estimat og kun densidste måling, dvs. at:
θt = funkθt−1, yt (16.2)Prisen, der må betales, er afhængig af om hvorvidt θ (i statistiske termer) er en su ientstatistik af Yt−1. Rekursive metoder er endvidere karakteriseret ved let at kunne ændres forat følge tidsvarierende parametre.16.1 RLS-algoritmen.RLS-algoritmen (Re ursive Least Squares) er relateret til ARX-strukturen og har adskilligeindgangsvinkler. Den betegner derfor ofte i litteraturen som RARX-metoden. Lad os førstse hvorledes vi rekursivt kan estimere parametre i en ARX-model. Vi tager udgangspunkt iafsnit 13 med systembeskrivelsen på formen:A(q−1)yt = q
−kB(q−1)ut + et (16.3)hvor et er en sekvens af uafhængige stokastiske variable med middelværdi nul (og endeligkonstant varians). Denne beskrivelse kan let bringes på formen:
yt = ϕTt θ + et (16.4)429

430 16.1 RLS-algoritmen.hvor:ϕt = (−yt−1, ...,−yt−na , ut−k, ..., ut−nb−k)T (16.5)
θ = (a1, ..., ana , b0, ..., bnb)T (16.6)Antag, nu at vi på basis af t målinger har fundet LS estimatet, θt. Dette estimat minimerer:
Jt =
tX
i=1
1
2ε2i (16.7)hvor
εi = yi − ϕTi θi (16.8)og er givet ved (13.18) eller:
θt =
(
tX
i=1
ϕiϕTi
)−1
×tX
i=1
ϕiyi (16.9)Det kan let indses (ved f. eks. at kombinere (16.8) og (16.9)), at θt er bestemt således at:tX
i=1
ϕiεi = 0 (16.10)Lad matri en Pt være givet ved:P
−1t =
tX
i=1
ϕiϕTi (16.11)Vi vil nu se hvorledes θt opdateres, d.v.s. hvorledes θt og θt+1 er relateret. Fra kapitel 13(eller rettere formel (13.20))har vi direkte at:
θt+1 = θt +
(
t+1X
i=1
ϕiϕTi
)−1
×t+1X
i=1
ϕiεi (16.12)Vi kan derved skrive RLS-estimatoren på formen:θt+1 = θt + Pt+1ϕt+1εt+1
εt+1 = yt+1 − ϕTt+1θt
P−1t+1 = P
−1t + ϕt+1ϕ
Tt+1Bemærk slægtskabet mellem LS, ML og Bayesiansk - estimation af parametre i en ARX-model, når støjen er normalfordelt. Vi kan også skrive RLS algoritmen på følgende form:θt+1 = θt + κt+1εt+1 (16.13)κt+1 =
Ptϕt+1
1 + ϕTt+1Ptϕt+1
(16.14)Pt+1 =
“
I − κt+1ϕTt+1
”
Pt (16.15)

431Det bemærkes under sædvanlige ergodi itetsantagelser at:Rt =
1
t
MX
t=1
ϕtϕTt → Eϕtϕ
Tt for M → ∞ (16.16)Elementerne i R-matri en er kovariansudtryk, der er bestem at hvorledes systemet er på-virket (eller eksiteret) og af systemets egenskaber. For endelig t gælder der approximativtat:
Pt ≈ 1
tEn
ϕtϕ⊤t
o (16.17)Som i det ikke rekursive tilfælde (se [side 380 (13.32)) kan det vises, at en nødvendigbetingelse for at estimaterne er konsistente er, at residualerne, εt er ukorrelerede medregressorene, ϕt, for korrekte parametre .RLS-algoritmen kan endvidere tænkes fremkommet ved en rekursiv minimering (jvf. appen-dix I) af kriteriet med en tidsmæssige udvikling givet ved:Jt+1 = Jt +
1
2ε2t+1 (16.18)Det vil blandt andet sige at P -matri en, der er den inverse hessian til tabsfunktionen,er bestemt af systemets dynamik samt eksitationens karakter. P -matri en indeholder bl.a.information om i hvilke retninger (og hvor meget) tabet stiger.Bemærk, at εt er ettrinsprædiktionensfejl, d.v.s. at:
εt = yt − Eyt|Yt−1 (16.19)og atεt|Yt−1 ∈ F(0, σ2(1 + ϕ
Tt Ptϕt) (16.20)Bemærk, at Pt → 0 (κt → 0) for t→ ∞ hvorved tilbagekoblingen, κt+1, fra prædiktionsfejlenforsvinder i asymptoten. Desuden gælder der at:
V ar(θt|Yt) = Ptσ2 (16.21)og asymptotisk (d.v.s. for t→ ∞), at:
V ar(θt) = Ptσ2 (16.22)Hvis der eksisterer en a'priori fordeling af parametrene vælges θ0 og P0 i overensstemmelsehermed, ellers vælges f. eks.
θ0 = 0 P0 = βI (16.23)hvor β er et stort tal.Det skal understreges, at ovenstående rekursioner kun er matematiske udtryk og ikke direkteprogrammeringsoplæg. Ved implementering på pro esdatamater skal der anvendes numeriskfornuftige realisationer f. eks. baseret på en UDU faktorisering, hvor der benyttes en faktori-sering af P-matri en i P = UDUT . Her er D en diagonal matrix og U er en upper triangulærmatrix. Algoritmen består af en opdatering af U og D. (se f.eks. (Bierman 1977)).

432 16.2 RELS- og RML-algoritmerneRLS-algoritmen er desuden kalmanlteret for systemet,θt+1 = θt θt0 = θ0 (16.24)yt = ϕ
Tt θ + et (16.25)Denne observation giver os en mulighed til at estimere tidsvarierende systemparametre.16.2 RELS- og RML-algoritmerneProblemet med RLS er (som i det ikke-rekursive tilfælde) at estimaterne ikke er entrale,hvis støjsekvensen (i ARX-strukturen) er korelleret. Antag, at det aktuelle system er givetved følgende ARMAX-struktur:
A(q−1)yt = q−kB(q−1)ut +C(q−1)et (16.26)hvor et er sekvens af uafhængige stokastiske variable. Vi kan på sædvanlig vis bringebeskrivelsen på formen:
yt = ϕTt θ + et (16.27)hvor:
ϕt = (−yt−1, · · · ,−yt−na , ut−k, ut−1−k, · · · , ut−nb−k, et−1, · · · , et−nc)T (16.28)
θ = (a1, · · · , ana , b0, b1, · · · , bnb, c1, · · · , cnc )T (16.29)Problemet er blot at ikke alle regressorer kendes. Dette giver anledning til to typer af me-toder. For ARMAX-strukturen giver det anledning til RELS- og RML-metoderne.16.2.1 RELS-algoritmenEn metode (RELS) er en viderudvikling af metoden, der kendes fra den linære regressionog betegnes derfor som PLR-metoden, dvs. som Pseudo Lineær Regression. Af historiskegrunde betegnes den rekursive udgave af PLR-metoden som RELS, idet det er en Rekursivudgave af en udvidet mindste kvadraters metode (dvs. en Extended Least Squares method).Metoden tager udgangspunkt i beskrivelsen:
yt = ϕTt θ + et (16.30)og at estimatet i det lineære regressionstilfælde kan skrives som:
θ = sol
(
NX
i=1
ϕiεi = 0
) (16.31)Problemet er blot, som tidligere nævnt, at et ikke er kendt, men må estimeres. Hvis deranvendes en direkte udvidelse af LS-algoritmen (se f.eks. (13.82)) fås en opdatering efter:

16.2.2 RML-algoritmen 433θt+1 = θt + Pt+1ϕt+1εt+1
εt+1 = yt+1 − ϕ⊤t+1θt
P−1t+1 = P
−1t + ϕt+1ϕ
Tt+1hvor ϕt er givet ved (16.28) med et−i erstattet af εt−i.16.2.2 RML-algoritmenEn RekursivMaximumLikelihood algoritme er baseret på en adaptiv minimering (se appen-dix I) af likelihood funktionen for en ARMAX modestruktur. Til bestemmelse af gradienten(og til approximation af hessianmatri en) anvendes jvf. (13.102) at:ψt = −∇θεt =
1
C(q−1)ϕt (16.32)Algoritmen kan således i forlængelse af (13.100) skrives som:
θt+1 = θt + Pt+1ψt+1εt+1
εt+1 = yt+1 − ϕ⊤t+1θt
P−1t+1 = P
−1t + ψt+1ψ
Tt+116.3 RPLR- og RPEM-algoritmerneLad os nu vende os mod den generelle eksterne modelstruktur eller L-strukturen:Ayt =
B
Fut +
C
Det + d (16.33)der, som i det ikkerekursive tilfælde, kan skrives på formen:
yt = ϕTt θ + et (16.34)hvor:
ϕt = (−yt−1, ..., ut, ...,−yut−1, ..., et−1, ...,−ye
t−1, ..., 1)T
θ = (a1, ..., b0, ..., a1,u, ..., c1, ..., a1,2, ..., d)TBlandt regressorene i ϕ er der signaler, der ikke kendes. Det er derfor nødvendigt at estimeredisse, som f.eks. ud fra følgende ltre.
yut = q
−k B
Au
ut yet = Ayt − y
ut − d
et =Ae
Cy
et = εt

434 16.4 STA-algoritmerIdet disse ltre afhænger af parameterestimaterne (og deres præ ision) vil der eksistere enkobling mellem estimater og regressorer og omvendt.16.3.1 RPLR-algoritmenVælges at estimere parametrene i den generelle modelstruktur (16.14) ud fra en udvidelseaf lineær regression, dvs. anvende en Rerkursiv Pseudo Linær Regression algoritme, kandisse jvf. (13.112) bestemmes med rekursionerne:θt+1 = θt + Pt+1ϕt+1εt+1
εt+1 = yt+1 − ϕ⊤t+1θt
P−1t+1 = P
−1t + ϕt+1ϕ
Tt+116.3.2 RPEM-algoritmenEn RPEM algoritme (Re ursive Predi tion Error Method) består en adaptiv minimering(se appendix I) af et kriterium, der kvadratisk i ettrinsprædiktionsfejlen.Det kan efter nogle simple men arbejdssomme manipulationer vises (jvf. (13.117) at:
ψt = −∇θεt = (−yt−1, ..., ut, ...,−yut−1, ..., et−1, ...,−ye
t−1, ..., δ)T (16.35)hvor:
yt =D
Cyt ut =
D
CFut y
ut = − D
CFy
ut
et =1
Cεt y
et = − 1
Cy
et δ =
D
C1RPEM-algoritmen kan da ifølge (13.118) bestemmes med rekursionerne:
θt+1 = θt + Pt+1ψt+1εt+1
εt+1 = yt+1 − ϕ⊤t+1θt
P−1t+1 = P
−1t + ψt+1ψ
Tt+116.4 STA-algoritmerBasalt set består en estimationsalgoritme af to elementer, en estimationsmetode samt enalgoritme til at beregne (eller til at søge efter) estimatet. De tidligere angive algoritmer eralle baseret på en variant af en Newton-Raphson søgerutine. Denne søgealgoritme vides atvære særdeles velegnet, hvis tabsaden er rimelig kvadratisk i parametrene.
435Der kan være forskellige årsager til at anvende andre algoritmer. En af dem kan være pro-blemer med beregningstiden i den aktuelle realtids implementation.Hvis en gradientalgoritme eller en stokastiske approximation (STA) ligges til grund for denrekursive algoritme kan den (jvf. appendix I) skrives som:θt+1 = θt +
1
rt+1ϕt+1εt+1 (16.36)
εt+1 = yt+1 − ϕ⊤t+1θt (16.37)
rt+1 = r1 + 1 (16.38)Ofte ses (16.38) erstattet af rekursionen:rt+1 = r1 + ϕ
Tt+1ϕt+1 (16.39)
436 16.4 STA-algoritmer
Kapitel 17Tidsvariende SystemerDer eksister to prin ipielt forskellige metoder til at estimere parametre i tidsvarierendesystemer. Den ene metode er baseret på en model for tidsvariationerne. Den anden typemetode er baseret på en antagelse om at parametrene i en periode med en vis rimelighed kanantagelses at være konstante. I en sådan metode skal information på passende vis bortvægtes.I dette kapitel vil kort beskrive en del af de vigtigste metoder. Det skal dog bemærkes atlisten på ingen måde vil give udtryk for at være komplet.17.1 GlemselsmetoderDe tidligere nævnte metoder kan ikke (og er ikke konstrueret til at) følge tidsvariationeri dynamiske systemer. Ud fra et praktisk synspunkt er problemet at forstærkningen Ktforsvinder. Vi vil nu betragte tre metoder, der mere eller mindre tager udgangspunkt iovennævnte faktum.17.1.1 ResettingEn måde hvorpå algoritmen kan genvinde sin evne til at opdatere sine estimater er vedpassende lejligheder (ti) at resette eller at genstarte algoritmen.Pti = Pi θti = θi (17.1)Valget af hvornår (ti), hvorledes (Pi, θi) algoritmen resettes kan varierer alt efter den konkre-te anvendelse. I forbindelse med bat h pro essing vil det være rimeligt at resette algoritmenud fra et fast punkt ved start på ny bat h. Hvis ti er bestemt ud fra et supervision system,der har alarmeret for eventuelle ændringer i systemdynamikken vil valget:
Pi > Pti−1 θi = θti−1 (17.2)437

438 17.1 Glemselsmetoder17.1.2 Konstant GainKonstant Gain algoritmen eksister i to varianter. I den første holdes tilbagekoblingen, κ,konstant og estimationen foregår følgelig efter:θt+1 = θt + κεt+1 (17.3)Derved kommer estimationsfejlen, θ = θ − θ, til at have en tidsmæssig udvikling, der kanbeskrives med:
θt+1 = (I − κϕTt+1)θt − κet+1 (17.4)Som i tilfældet med tilstandsestimation er problemet med denne observerløsning et kompro-mis mellem fejlreduktion og følsomhed overfor støj.Den anden variant består i at fastholde P -matri en til en bestemt værdi.
Pt = P (17.5)Estimatet opdateres da efter:θt+1 = θt + κt+1εt+1 (17.6)κt+1 =
Pϕt+1
1 + ϕ⊤t+1Pϕt+1
(17.7)Baggrunden for denne algoritme er at P -matri en indeholder information om i hvilke ret-ninger (og om hvor meget) tabsfunktionen stiger.Fejlen har i dette tilfælde en udvikling der er givet ved:θt+1 =
I − Pϕt+1ϕTt+1
1 + ϕTt+1Pϕt+1
ff
θt − Pϕt+1
1 + ϕTt+1Pϕt+1
et+1 (17.8)Det kan vises at der er np − 1 egenværdier til (17.8) der er lig 1 og en egenværdi, der er lig:νt+1 = 1 − ϕ
Tt+1κt+1
=1
1 + ϕTt+1Pϕt+1Den tilhørende egenvektor er lig κt+1, der således angiver i hvilken retning estimationsfejlen,
θt+1 redu eres. Tilsvarende er det i κt+1-retningen at støjbidraget et+1 bliver adderet.17.1.3 Eksponentiel glemselEksponentiel glemsel er nok i virkeligheden den mest populære glemsesmetode.Den grund-liggende ide bag denne metode er gradvist at bortvægte indydelsen fra tidligere målinger.Dvs. man i stedet for (16.7) med λ < 1 anvender:Jt =
tX
i=1
λt−iε2i (17.9)

17.1.3 Eksponentiel glemsel 439der også kan skrives som:Jt+1 = λJt +
1
2ε2t+1 (17.10)(hvilket selvfølgelig skal sammenlignes med (16.18). Anvendes de i appendix I angivne me-toder til rekursiv minimering af kriterie funktioner (med en Newton-Raphson variant) bliverestimatet bestemt med følgende rekursioner:
θt+1 = θt + Pt+1ϕt+1εt+1 (17.11)εt+1 = yt+1 − ϕ
⊤t+1θt (17.12)
P−1t+1 = λP
−1t + ϕt+1ϕ
⊤t+1 (17.13)Dette sæt rekursioner adskiller sig kun marginalt fra den basale algoritme,hvilket er enmedvirkende årsag til dens popularitet. I den anden velkendte formulering sker opdateringenefter:θt+1 = θt + κt+1εt+1 (17.14)
κt+1 =Ptϕt+1
λ+ ϕ⊤t+1Ptϕt+1
(17.15)Pt+1 =
“
I − κt+1ϕ⊤t+1
”
Pt1
λ(17.16)Algoritmens tuningparameter, hukommelsesfaktoren λ ∈ [0; 1], Bemærk at hukommelses-faktoren λ i visse dele af litteraturen betegnes som en glemselsfaktor (forgetting fa tor).kan vælges ud fra et eventuelt kendskab til længden af den horisont hvor man med en visrimelighed kan approximere parametrene som værende konstante. Den ækvivalente horisont,
N∞, er deneret ved:N∞ =
1
1 − λ(17.17)Da nu:
∞X
i=0
λi =
1
1 − λ(17.18)ses den ækvivalente horisont som det tidsinterval som estimationen er baseret på såfremtalle observationer havde samme vægt.
λ = 1 − 1
N∞(17.19)Denne algoritme har dog et problem i forbindelse med manglende eksitation af det aktuellesystem. Denne mangel kan skyldes mangler i det eksiterende signal, men også skyldes enoverparametriseret model. Konsekvensen af denne manglede eksitation er at P -matri envokser eksponentielt i visse retninger af parameterrummet (de retninger, der ikke eksiteres).Dette kan selvfølgelig føre numeriske problemer, men også andre problemer kan fremkomme.Parameterestimaterne vil være meget følsomme overfor eksitationer i netop disse retninger.Hvis der så af en eller anden grund kommer eksitation i en af de pågældende retninger vildet have store konsekvenser for estimaterne.Eksempel: 17.1 Betragt et system givet ved:
yt − 0.8yt−1 = btut−1 + et (17.20)

440 17.1 Glemselsmetoder
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.999
0.99
0.980.9
0.95
0.985
Gle
mse
lsfa
ktor
t
Vaegt
Figur 17.1. En observation har en indydelse på estimatet der her er exponentieltaftagendehvor inputsekvensen, ut, er et PRBS-signal (angivet i gur 17.2) og hvor innovationsstøjen,et, er en sekvens af uafhængige N(0, 0.32) fordelte stokastiske variable. Parameteren b0 har entidsvariation, der er stykvis lineær som angivet i gurene 17.3-17.4.I gur 17.3 er der vist sporet af parameter estimaterne for λ = 1 (dvs. for en RLS-algoritme) og forλ = 0.98. Samtidig er der i guren angivet hvorledes de korrekte parametre udvikler sig. Bemærkat estimatet af b0 i ringe grad følger variationen i begge tilfælde. For λ = 0.98 antydes et nogetusikkert estimat af a1-parameteren.I gur 17.4 er sporet af estimater og korrekte parameterværdier plottet. Det bemærkes at algoritmenevne til at følge variationerne i b0 øges med faldende λ. Tilsvarende øges variationen i estimatetaf den ellers konstante a1-parameter. Dette skyldes at eksponentiel glemsel ikke skelner mellem deenkelte retninger i parameterrummet.Ud fra gurene 17.3 og 17.4 kan det ses at eksponentiel glemsel ikke er velegnet til hurtigt varierendeparametre (hvad den heller ikke er konstrueret til), da den glemmer ens i alle retninger uansetparametervariation. 2
Eksponentiel glemsel indebærer et problem ved manglende eksitation. Det fremgår af (16.30)at ved manglende eksitation ϕ = 0 vil Pt vokse monoton (for λ < 1). Hvis ϕt er begrænset tilet delrum af parameterrummet vil Pt ligeledes vokse monotont i de retninger af parameter-rummet, der svarer til de ikke eksiterende retninger. Dette fænomen er spe ielt problematiskved overparametrisering.
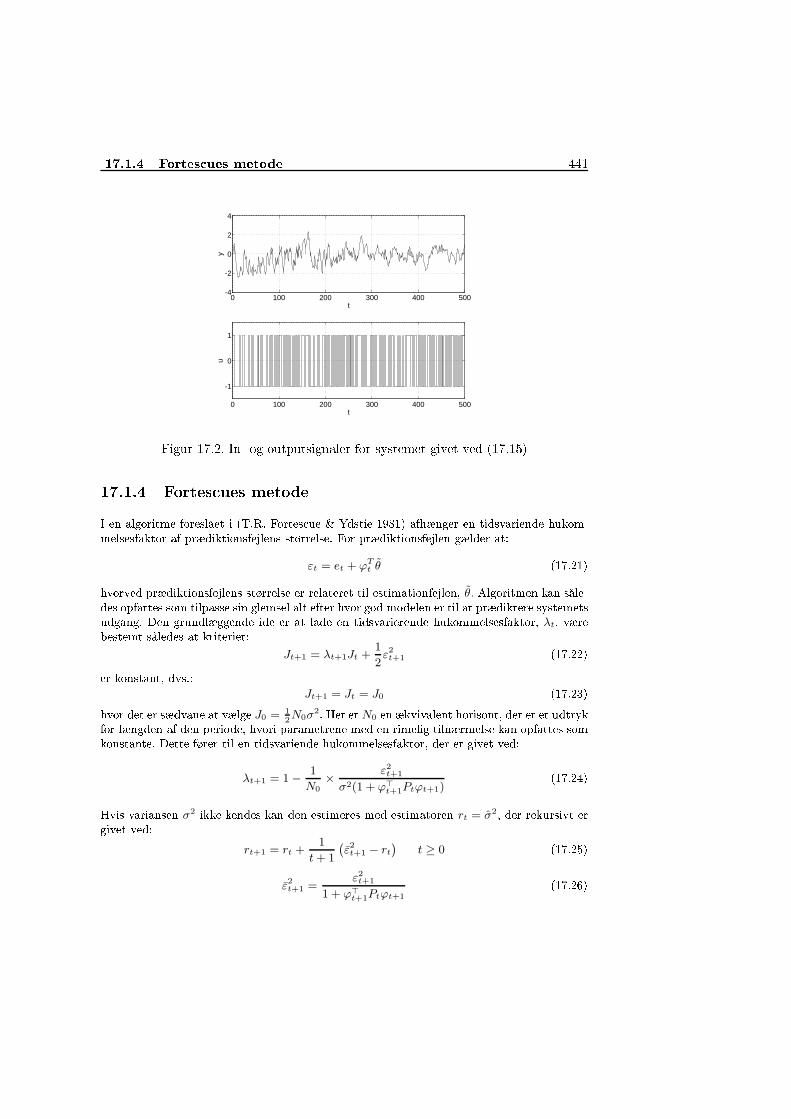
17.1.4 Fortes ues metode 4410 100 200 300 400 500
-4
-2
0
2
4y
t
0 100 200 300 400 500
-1
0
1
u
tFigur 17.2. In- og outputsignaler for systemet givet ved (17.15)17.1.4 Fortes ues metodeI en algoritme foreslået i (T.R. Fortes ue & Ydstie 1981) afhænger en tidsvariende hukom-melsesfaktor af prædiktionsfejlens størrelse. For prædiktionsfejlen gælder at:εt = et + ϕ
Tt θ (17.21)hvorved prædiktionsfejlens størrelse er relateret til estimationfejlen, θ. Algoritmen kan såle-des opfattes som tilpasse sin glemsel alt efter hvor god modelen er til at prædiktere systemetsudgang. Den grundlæggende ide er at lade en tidsvarierende hukommelsesfaktor, λt, værebestemt således at kriteriet:
Jt+1 = λt+1Jt +1
2ε2t+1 (17.22)er konstant, dvs.:
Jt+1 = Jt = J0 (17.23)hvor det er sædvane at vælge J0 = 12N0σ
2. Her er N0 en ækvivalent horisont, der er et udtrykfor længden af den periode, hvori parametrene med en rimelig tilnærmelse kan opfattes somkonstante. Dette fører til en tidsvariende hukommelsesfaktor, der er givet ved:λt+1 = 1 − 1
N0× ε2t+1
σ2(1 + ϕ⊤t+1Ptϕt+1)
(17.24)Hvis variansen σ2 ikke kendes kan den estimeres med estimatoren rt = σ2, der rekursivt ergivet ved:rt+1 = rt +
1
t+ 1
`
ε2t+1 − rt
´
t ≥ 0 (17.25)ε2t+1 =
ε2t+1
1 + ϕ⊤t+1Ptϕt+1
(17.26)

442 17.2 Modelestimatorer0 100 200 300 400 500
-1
-0.5
0
0.5
1
th
t
lambda=1
0 100 200 300 400 500-1
-0.5
0
0.5
1
th
t
lambda=0.98
Figur 17.3. Spor af estimater og korrekte parametre for λ = 1 og for λ = 0.98Denne estimator er baseret på at:εt ∈ N
“
0, σ2“
1 + ϕ⊤t+1Ptϕt+1
”” (17.27)Som initialværdi kan r0 = ε20 anvendes.17.2 ModelestimatorerSom modsætning til de tidligere nævnte algoritmer er modelestimatorerne,i hvor der postu-leres en model for udviklingen af parametrene. I denne sammenhæng eksisterer stokastiskeog deterministiske modeller for parameterudviklingen.17.2.1 Stokastiske ModellerDer eksisterer naturligvis en lang række typer af stokastiske modeller. I dette afsnit vil vidog betragte en meget simpel type, der fører til en estimator, hvis rekursioner (formelt)er identiske med kalmanlterets. Antages, det at parametrenes udvikling er givet ved enrandom walk pro es, kan vi beskrive systemet ved:θt+1 = θt + vt θ0 ∈ N(0, P0σ
2) (17.28)yt = ϕ
⊤t θt + et (17.29)hvor vt og et er sekvenser af uafhængige stokastiske variable, der er uafhængige af θsfor s ≤ t. Det antages desuden at:
et ∈ N(0, σ2) og vt ∈ N(0, R1σ2) (17.30)
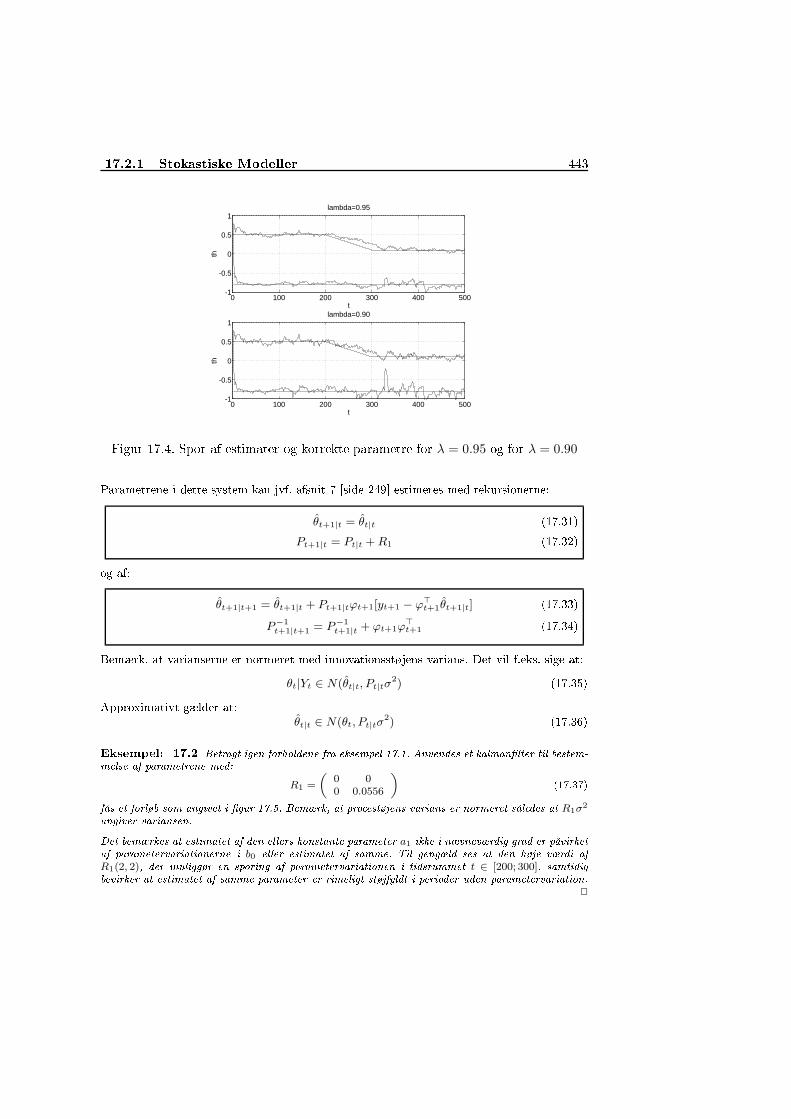
17.2.1 Stokastiske Modeller 4430 100 200 300 400 500
-1
-0.5
0
0.5
1th
t
lambda=0.95
0 100 200 300 400 500-1
-0.5
0
0.5
1
th
t
lambda=0.90
Figur 17.4. Spor af estimater og korrekte parametre for λ = 0.95 og for λ = 0.90Parametrene i dette system kan jvf. afsnit 7 [side 249 estimeres med rekursionerne:θt+1|t = θt|t (17.31)
Pt+1|t = Pt|t +R1 (17.32)og af:θt+1|t+1 = θt+1|t + Pt+1|tϕt+1[yt+1 − ϕ
⊤t+1θt+1|t] (17.33)
P−1t+1|t+1 = P
−1t+1|t + ϕt+1ϕ
⊤t+1 (17.34)Bemærk, at varianserne er normeret med innovationsstøjens varians. Det vil f.eks. sige at:
θt|Yt ∈ N(θt|t, Pt|tσ2) (17.35)Approximativt gælder at:
θt|t ∈ N(θt, Pt|tσ2) (17.36)Eksempel: 17.2 Betragt igen forholdene fra eksempel 17.1. Anvendes et kalmanlter til bestem-melse af parametrene med:
R1 =
„
0 00 0.0556
« (17.37)fås et forløb som angivet i gur 17.5. Bemærk, at pro estøjens varians er normeret således at R1σ2angiver variansen.Det bemærkes at estimatet af den ellers konstante parameter a1 ikke i nævneværdig grad er påvirketaf parametervariationerne i b0 eller estimatet af samme. Til gengæld ses at den høje værdi afR1(2, 2), der muliggør en sporing af parametervariationen i tidsrummet t ∈ [200; 300], samtidigbevirker at estimatet af samme parameter er rimeligt støjfyldt i perioder uden parametervariation.
2
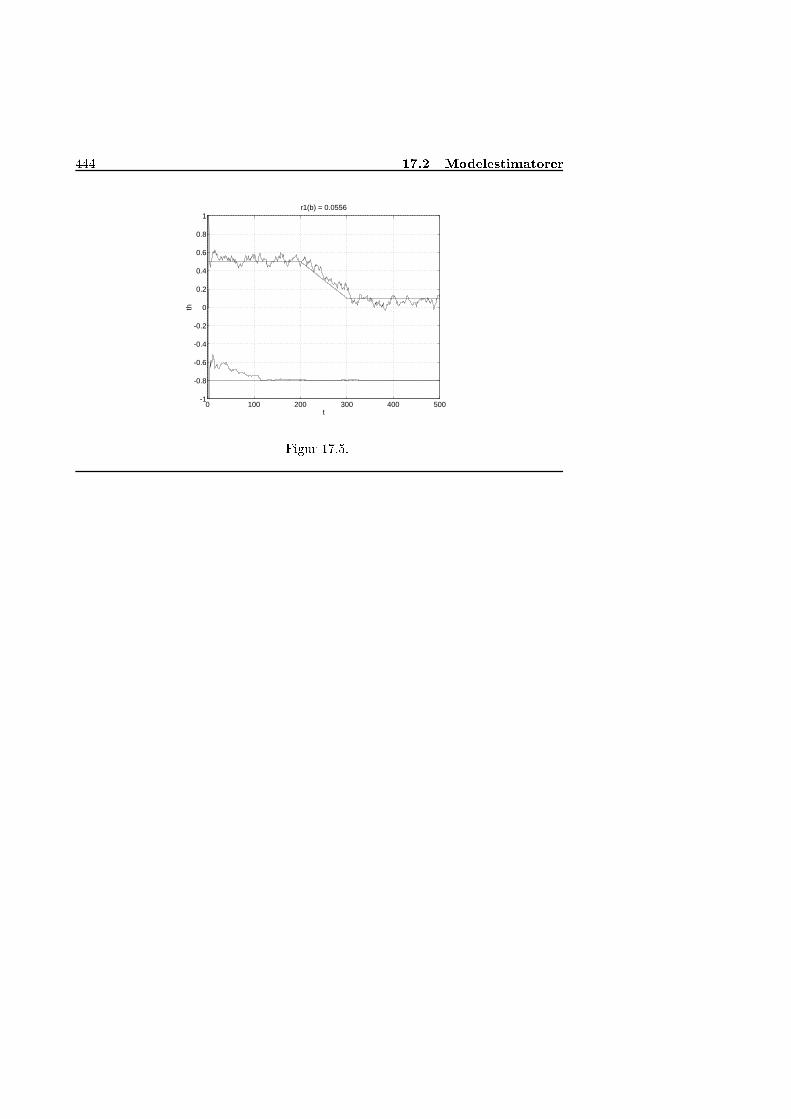
444 17.2 Modelestimatorer
0 100 200 300 400 500-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
th
t
r1(b) = 0.0556
Figur 17.5.
Del IVDel 4: Adaptive systemer
445


Kapitel 18Adaptiv Regulering.18.1 IndledningDet er velkendt, at den meget anvendte PID-regulator er relativt robust og ikke krævermegen pro esinformation. I prin ippet kræves der blot et kendskab til et punkt i bodeplottetfor den deterministiske del af pro esmodellen, dvs. for overføringsfunktionen fra styresignalettil udgangen. PID-regulatoren er altså karakteriseret ved at være let at designe og at værerelativt robust. Til gengæld er den ikke nødvendigvis særlig optimal og tager spe ielt ikkehensyn til naturen af de stokastiske forstyrrelser, der påvirker systemet.I første del af disse noter har vi betragtet metoder til at modellere systemer, der er udsatfor stokastiske påvirkninger. En af standard metoderne involverede en modellering af destokastiske forstyrrelser, således at forstyrrelserne kunne opfattes som genereret af hvid støj,der er ltreret gennem et lineært lter. Egenskaberne for dette lineære lter er således etudtryk for de spektrale egenskaber (eller korrelationsstruktur) hos de stokastiske forstyr-relser. Beskrivelsen af det dynamiske system med stokastiske påvirkninger resulterede i enbeskrivelse, der både indeholder en deterministisk dynamik og en dynamik, der hidrører frade stokastiske påvirkninger. De resulterende systembeskrivelser, som vi betegner som stoka-stiske systemer, påvirkes følgelig af styrbare signaler (styresignaler) og af støjsignaler, derer tidsmæssigt ukorrelerede (d.v.s. hvide).Efter at have beskæftiget os med beskrivelser af stokastiske systemer, har vi undersøgtforskellige metoder til på optimal vis at styre eller regulere disse stokastiske systemer. Deundersøgte metoder adskilte sig bl. a. ved:
• hvilken modeltype, der er anvendt til beskrivelsen• det givne optimalitetskriterium• hvilken informationsmængde styringen er baseret på (og hvilke restriktioner optimumskal opfylde) 447

448 18.2 Adaptiv ReguleringI disse optimale regulerings metoder er der anvendt en meget detaljeret viden om systemetsdynamik. Det gælder således både den rent deterministiske og den der hidrører fra de sto-kastiske forstyrrelser. En sådan detaljeret information om det pågældende system kan ikkealtid forventes at være til stede. Det kan skyldes, at den indgående fysik ikke er tilstrækkeligtklarlagt eller blot at visse systemparametre ikke er bestemt præ ist. Spe ielt er dynamikken,der beskriver de stokastiske forstyrrelser svære at modellere ud fra rent deduktive metoder.I noternes tredie del har vi undersøgt, hvordan vi ud fra målte data kan korrigere eller op-datere vores forhåndsviden om det forelagte systems dynamik. At modellere et dynamisksystem (og dets stokastiske påvirkninger) betegnes som identikation eller statistisk model-lering. Det erindres at denne iterative modellerings pro es bl. a. består af dis ipliner somforsøgsplanlægning, strukturbestemmelse, parameterestimation og modelvalidering.En PID-regulator har i prin ippet kun tre parametre, hvilket forklarer hvorfor det er muligtat tune den i en given opstilling. En optimal regulator indeholder en rimelig detaljeretmodel for det forelagte system, hvorfor en sådan fremgangsmåde ikke er operationel. Deter følgelig oplagt at kombinere en identikation med en efterfølgende konstruktion af enoptimal regulator.Hvis systemet imidlertid er tidsvarierende f.eks. p.gr.a. slitage eller ælde må identikationengentages med jævne mellemrum. En anden fremgangsmåde er at kombinere en rekursivparameterestimation (også kaldet en on line metode) med en regulering. Den resulterendereguleringsalgoritme er i stand til af foretage en estimation af systemets parametre simultantmed en regulering. Herved er den i stand til at tilpasse reguleringen til det forelagte system.Dette prin ip er grundlæggende for den type af adaptive regulatorer, som vi i denne delaf kurset skal beskæftige os med. Denne type betegnes som stokastisk adaptive regulatorer.Vi vil dog indledningsvis give en kort oversigt over det område, der generelt betegnes somadaptiv regulering.18.2 Adaptiv ReguleringHvis man konsulterer faglitteraturen (se f.eks. (Åström 1983) og (Isermann 1982)) vil mannde, at der ikke eksisterer en entydig og stringent denition på hvad adaptiv regulering er.Intuitivt kan man dog angive, at en adaptiv regulator indeholder en evne til at adaptere,tilpasse sig til det system, der ønskes styret.I visse fremstillinger hæfter man sig ved, at parametre i virkeligheden er en matematiskabstraktion for langsomt varierende tilstande. Dette har relationer til den velkendte (tom-melnger)regel om, at man kun kan modellere et dynamisk system indenfor et frekvensvinduepå et par dekader.Under alle omstændigheder er et af argumenterne for anvendelse af adaptiv regulering etmanglende kendskab til (evt. nogle af) systemets parametre. Dette kan f. eks. skyldes atdisse er tidsvarierende. Lidt afhængig af, hvor restriktiv man ønsker at gøre denitionen afadaptiv regulering, kan man opfatte klassen af adaptive regulatorer som en delmængde afmetoder til at regulere et system, hvis dynamik ikke tilstrækkelig er kendt.Historisk set startede (jvf. (Åström 1983)) forskningen indenfor adaptiv regulering tidligt

449og var meget aktivt allerede i 1950. Forskningen var motiveret af design af regulatorerfor high performan e y, der har et meget bredt operationsområde afhængende af højde oghastighed. Som det betegnes så var datidens adaptive yregulering karakteriseret ved megenentusiasme, dårlig hardware og - en ikkeeksisterende teori.En type regulering, som ikke henregnes til klassen af adaptive metoder er de robuste regula-torer. Disse er alternative metoder, som kan anvendes i forbindelse med manglende kendskabtil systemets. Den grundlæggende loso er imidlertid en anden.I nedenstående illustrative gur er tabsfunktionen for en optimal og en robust regulerings-strategi afbildet som funktion af en systemparameter. Det bemærkes, at prisen for en højrobusthed, dvs. en lav følsomhed overfor parameterusikkerhed, er et lidt højere tab.-3 -2 -1 0 1 2 3 4 50
2
4
6
8
10
12
14
16
18
20
Optimal
SuboptimalFigur 18.1. Robusthed hos suboptimale strategierRobust regulering kan i en simpli eret fremstilling opfattes som modsætningen til adaptivregulering. I et robust design tilstræber man lav følsomhed overfor det ukendte i modsætningtil adaptiv regulering hvor man prøver at følge eller at estimere de ukendte parametre.De sædvanlige designalgoritmer er baseret på en lineær beskrivelse af det forelagte system.Er systemet (f. eks. et y eller robot) ulineært, kan man regulere det i et område omkringet givet arbejdspunkt ved at linearisere beskrivelsen (i arbejdspunktet) og basere designetpå den lineære beskrivelse. Problemet ved denne fremgangsmåde er blot, at hvis arbejds-punktet ændres (f.eks. ved at yet ændre højde eller hastighed) må reguleringen ændrestilsvarende. Man kan altså, hvis man kender arbejdspunktet, bestemme hvilken regulator,der skal anvendes. Gain s hedulering er en adaptiv teknik, der er baseret på en måling afkarakteristiske signaler, som fastlægger systemets arbejdstilstand. Parametrene i regulato-ren justeres således i forhold til arbejdspunktet. Dette kan illustreres som i gur 18.2 [side450.Bemærk, at i denne fremgangsmåde sker adaptionen, dvs. tilpasningen af reguleringen, iåben sløjfe. Der eksisterer således ingen tilbagekobling fra reguleringssystemets eektivitet(eller performan e). Der eksisterer dele af litteraturen, der ikke klassi erer gain s heduleringsom en adaptiv strategi.
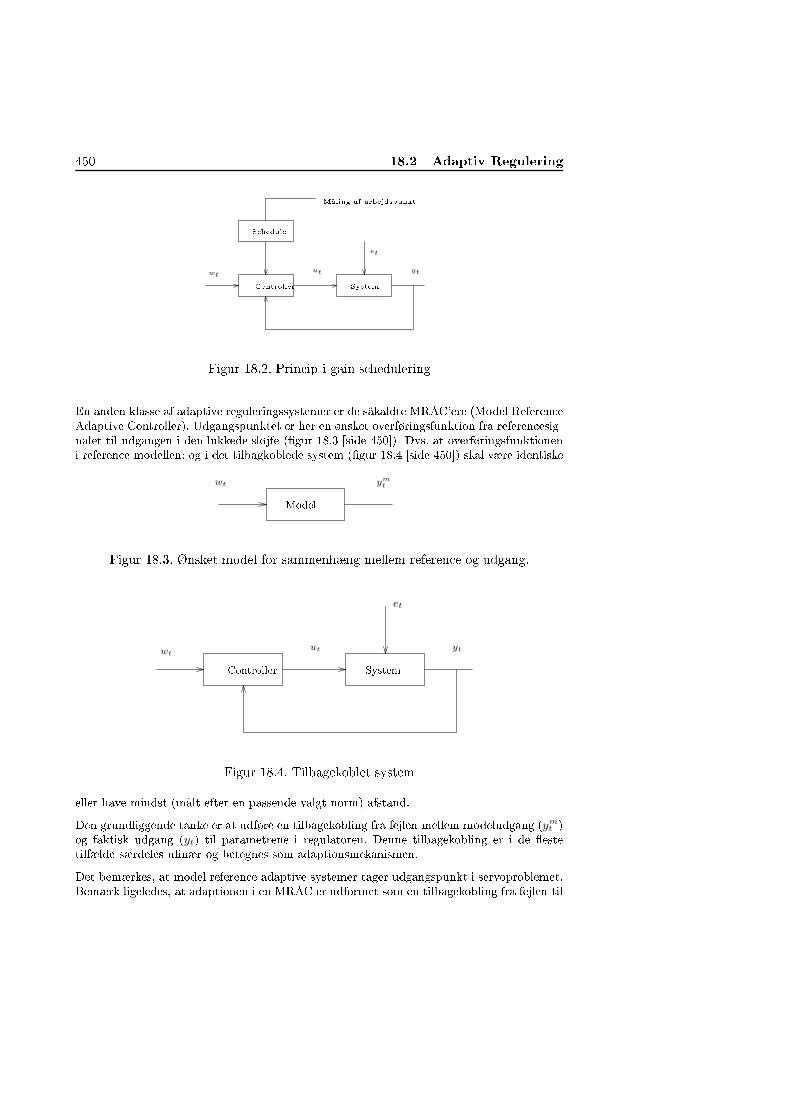
450 18.2 Adaptiv ReguleringytSystemControllerS hedule Måling af arbejdspunkt
wtut
et
Figur 18.2. Prin ip i gain s heduleringEn anden klasse af adaptive reguleringssystemer er de såkaldte MRAC'ere (Model Referen eAdaptive Controller). Udgangspunktet er her en ønsket overføringsfunktion fra referen esig-nalet til udgangen i den lukkede sløjfe (gur 18.3 [side 450) Dvs. at overføringsfunktioneni referen e modellen: og i det tilbagkoblede system (gur 18.4 [side 450) skal være identiskeModel ymtwtFigur 18.3. Ønsket model for sammenhæng mellem referen e og udgang.
etSystemControllerwtut yt
Figur 18.4. Tilbagekoblet systemeller have mindst (målt efter en passende valgt norm) afstand.Den grundliggende tanke er at udføre en tilbagekobling fra fejlen mellem modeludgang (ymt )og faktisk udgang (yt) til parametrene i regulatoren. Denne tilbagekobling er i de estetilfælde særdeles ulinær og betegnes som adaptionsmekanismen.Det bemærkes, at model referen e adaptive systemer tager udgangspunkt i servoproblemet.Bemærk ligeledes, at adaptionen i en MRAC er udformet som en tilbagekobling fra fejlen til
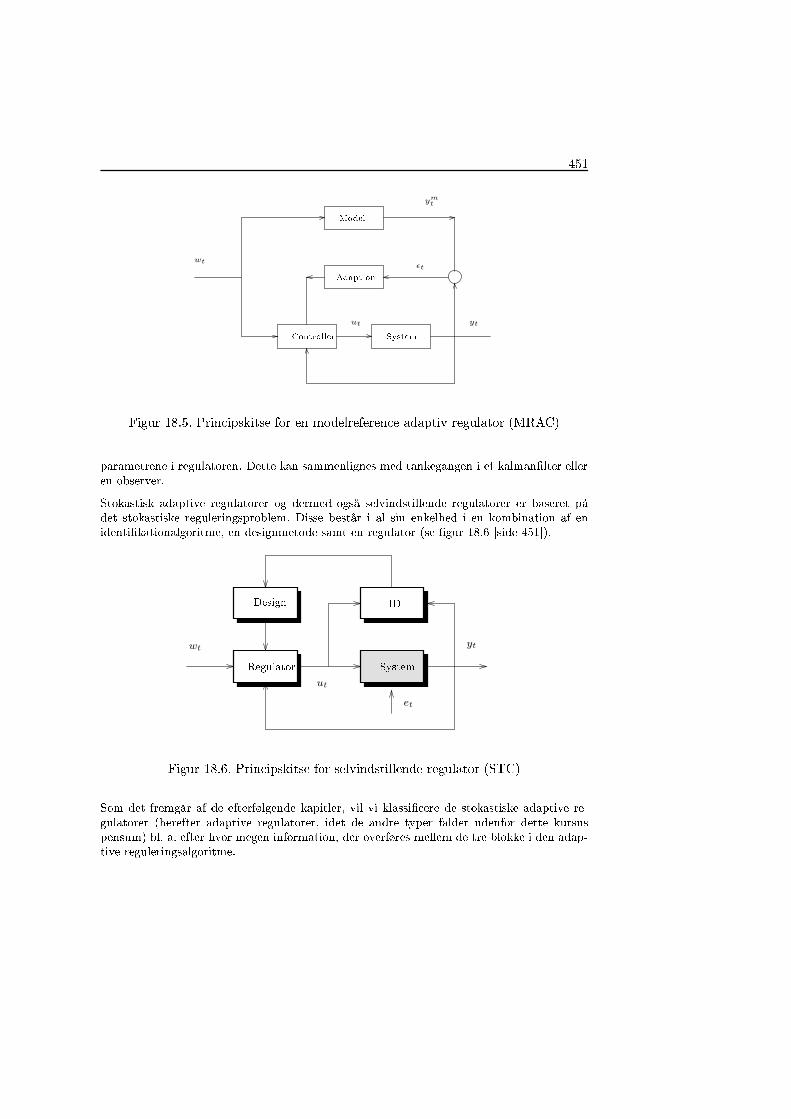
451ym
t
SystemControllerAdaptionModel
wt
ut yt
ǫt
Figur 18.5. Prin ipskitse for en modelreferen e adaptiv regulator (MRAC)parametrene i regulatoren. Dette kan sammenlignes med tankegangen i et kalmanlter elleren observer.Stokastisk adaptive regulatorer og dermed også selvindstillende regulatorer er baseret pådet stokastiske reguleringsproblem. Disse består i al sin enkelhed i en kombination af enidentikationalgoritme, en designmetode samt en regulator (se gur 18.6 [side 451).IDwt Regulator SystemDesign
et
ut
yt
Figur 18.6. Prin ipskitse for selvindstillende regulator (STC)Som det fremgår af de efterfølgende kapitler, vil vi klassi ere de stokastiske adaptive re-gulatorer (herefter adaptive regulatorer, idet de andre typer falder udenfor dette kursuspensum) bl. a. efter hvor megen information, der overføres mellem de tre blokke i den adap-tive reguleringsalgoritme.

452 18.2 Adaptiv Regulering
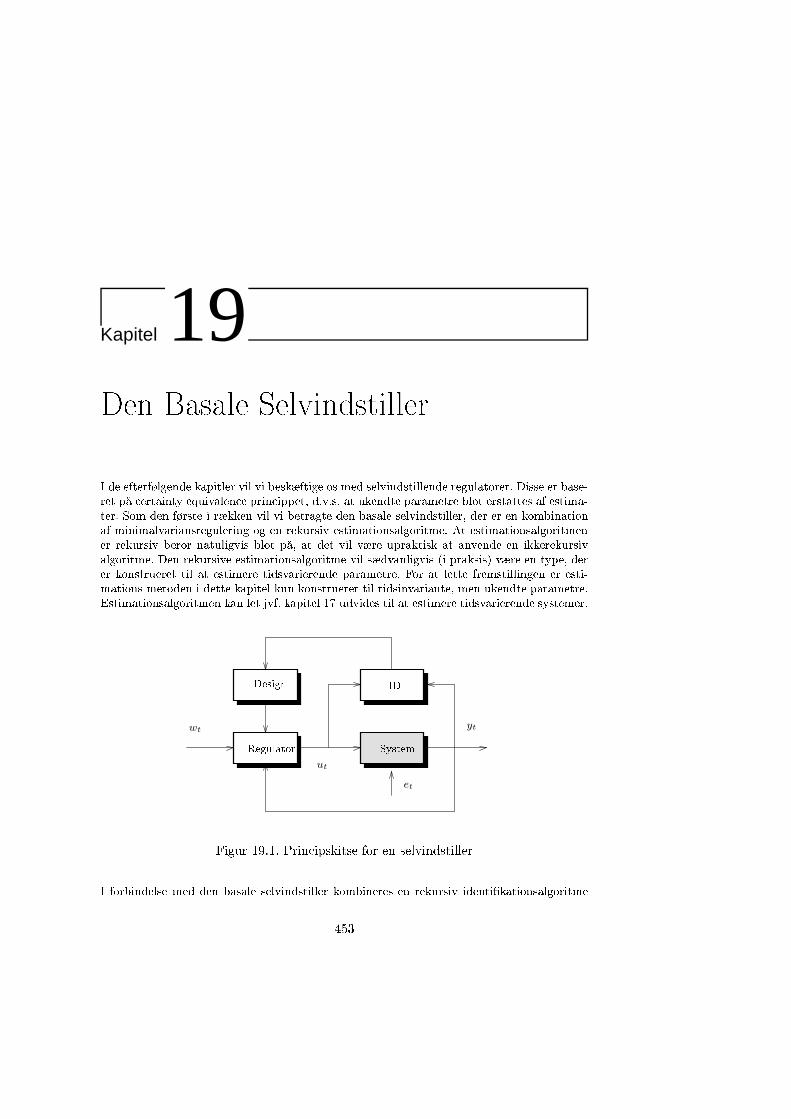
Kapitel 19Den Basale SelvindstillerI de efterfølgende kapitler vil vi beskæftige os med selvindstillende regulatorer. Disse er base-ret på ertainty equivalen e prin ippet, d.v.s. at ukendte parametre blot erstattes af estima-ter. Som den første i rækken vil vi betragte den basale selvindstiller, der er en kombinationaf minimalvariansregulering og en rekursiv estimationsalgoritme. At estimationsalgoritmener rekursiv beror natuligvis blot på, at det vil være upraktisk at anvende en ikkerekursivalgoritme. Den rekursive estimationsalgoritme vil sædvanligvis (i praksis) være en type, derer konstrueret til at estimere tidsvarierende parametre. For at lette fremstillingen er esti-mations metoden i dette kapitel kun konstrueret til tidsinvariante, men ukendte parametre.Estimationsalgoritmen kan let jvf. kapitel 17 udvides til at estimere tidsvarierende systemer.ID
wt Regulator SystemDesignet
ut
yt
Figur 19.1. Prin ipskitse for en selvindstillerI forbindelse med den basale selvindstiller kombineres en rekursiv identikationsalgoritme453

454 19.1 Ekspli it versionog en regulator, der minimerer kriteriet:J = Ey2
t+k (19.1)under restriktionen:ut = funcYt (19.2)og under en antagelse om at estimaterne er korrekte. Antag, at systemet et beskrevet ved:
A(q−1)yt = q−kB(q−1)ut +C(q−1)et (19.3)hvor et er en sekvens af ukorrelerede, F(0, σ2)-fordelte stokastiske variable. Bemærk, aten generel modelstruktur kan bringes på denne form. Det antages at systemets nulpunkteralle er beliggende indenfor enheds irklen samt at b0 i:
B(q−1) = b0 + b1q−1 + ...+ bnb
q−nb (19.4)er forskellig fra nul (dvs. at k er veldeneret). Lad os først betragte den direkte måde hvorpåen estimationsalgoritme og en reguleringsalgoritme kan kombineres.19.1 Ekspli it versionI en ekspli it adaptiv reguleringsalgoritme estimeres parametrene i systembeskrivelsen. D.v.s.at der anvendes modellen:
M A(q−1)yt = q−kB(q−1)ut + C(q−1)ǫt (19.5)Indføres der på sædvanlig vis en regressor- og en parametervektor, d.v.s.:
ϕt = (−yt−1, ..., ut−1, ..., ǫt−1, ...)T (19.6)og:
θ = (a1, ..., b0, ..., c1, ...)T (19.7)kan parametrene estimeres med rekursioner, der matematisk kan skrives på formen:
θt+1 = θt + Pt+1ψt+1ǫt+1 (19.8)ǫt+1 = yt+1 − ϕ
Tt+1θt (19.9)
P−1t+1 = P
−1t + ψ
Tt+1ψt+1 (19.10)Parametrene i ARMAX-modellen (19.5) kan bestemmes både med RELS og RML. Hvis deranvendes en RML-algoritme er:
ψt =1
C(q−1)ϕt (19.11)Anvendes en RELS-algoritme anvendes ψt = ϕt. Det erindres, at ovenstående rekursioner ermatematisk bekvemme udtryk, der skal implementeres efter en numerisk fornuftig måde. Detbemærkes deslige, at ovenstående rekursioner for ukendte, men konstante parametre udgør

455dataopdateringen i et kalmanlter (eller anden metode til at estimere tidsvarierende para-metre). Vi skal for at estimere tidsvariende parametre blot supplere med et sæt rekursioner,der realiserer selve tidsopdateringen.I den ekspli itte algoritme anvendes de estimerede parametre til i diophantineligningen:C(q−1) = A(q−1)G(q−1) + q
−kS(q−1) (19.12)at bestemme polynomierne G(q−1) og S(q−1) (jvf. kapitel 10). Her er:
G(q−1) = 1 + g1q−1 + ...+ gk−1q
1−k (19.13)S(q−1) = s0 + s1q
−1 + ...+ snsq−ns (19.14)
ns = max(na − 1, nc − k) (19.15)Endelig er reguleringen etableret med:R(q−1)ut = −S(q−1)yt (19.16)hvor:
R(q−1) = B(q−1)G(q−1) (19.17)= r0 + r1q
−1 + ...+ rnrq−nr ng = nb + k − 1 (19.18)Regulatoren kan også skrives som:
ut = − 1
r0s0yt + s1yt−1 + ...− r1ut−1 − r2ut−2 − ... (19.19)Bemærk, at g0 = b0. På grund af problemerne med identi erbarhed for et dynamisk system,der er reguleret af en minimalvarians regulator og på grund af pla eringen af g0 dvs. estimatetaf b0 i (19.19) behandles g0 spe ielt i visse varianter af den basale selvindstiller. I noglevarianter kseres estimatet a'priori (dvs. ikke at opdatere dette estimat efter (19.9)). Iandre varianter estimeres alle parametre undtagen b0 efter (19.9) mens b0 estimeres efter enspe iel algoritme.Det mærkes at der i prin ippet er to måder hvorpå en selvindstiller kan realiseres. Ef-ter hver sampling kan man vælge først at bestemme styresignalet eller først at opdatereestimaterne. Vælges det første sker bestemmelsen af styresignalet på basis af a'priori esti-mater, dvs. ut = funk(Yt, θt−1). Bestemmes styresignalet efter opdateringen af estimatet,dvs. ut = funk(Yt, θt), vil der på grund af beregningstiden i praksis blive introdu ereten tidsforsinkelse. Til gengæld vil bestemmelsen af styresignalet blive fortaget på et bedregrundlag. Hvilken løsning der vælges i praksis vil afhænge af beregningstiden set i relationtil samplingperioden.Eksempel: 19.1 Betragt et stokastisk system givet ved:
yt − 0.9yt−1 = 1.0ut−2 + et et ∈ Niid(0, σ2) (19.20)

456 19.1 Ekspli it versionAntag, at systemstrukturen (type, ordener og tidsforsinkelse) er kendt. Dvs. parametrene estimeresi en ARX-model:yt + ayt−1 = but−2 + et (19.21)Vælger vi at opdatere estimaterne før vi bestemmer styresignalet er prædiktionsfejlen givet ved:
ǫt = yt − at−1yt−1 − bt−1ut−2 (19.22)og estimaterne:θt =
„
at
bt
« (19.23)bestemmes ved opdateringen (19.9). På basis af θt bestemmes regulatorpolynomierne ved at løse(19.9), dvs. at løse:1 = (1 + atq
−1)(1 + g1q−1) + q−2s0 (19.24)Dermed er:G(q−1) = 1 − atq
−1 S(q−1) = a2t (19.25)Styresignalet bestemmes ved:
ut = atut−1 − a2t
bt
yt (19.26)For korrekte estimater vil der i stationaritet gælde at:yt = (1 + 0.9q−1)et (19.27)hvilket kan anvendes til beregning af teoretiske værdier af tabet. I gur 19.2 og 19.3 er estimaterneaf systemparametrene og de dermed beregnede regulatorparametre angivet.
0 20 40 60 80 100-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Parameterestimater
Figur 19.2. Udvikling af estimater af systemparametre fra eksempel 19.1 [side 457.I gur 19.4 er de akkumulerede regulerings- og estimationstab angivet. Disse er:Jr(t) =
tX
y2i Je(t) =
tX
ǫ2i (19.28)Samtidig er de teoretiske nedre grænser angivet. Bemærk, at på trods af en tilsyneladende langsomkonvergens er tabene (på nær et initielt tab) næsten identisk med de teoretisk forventede.
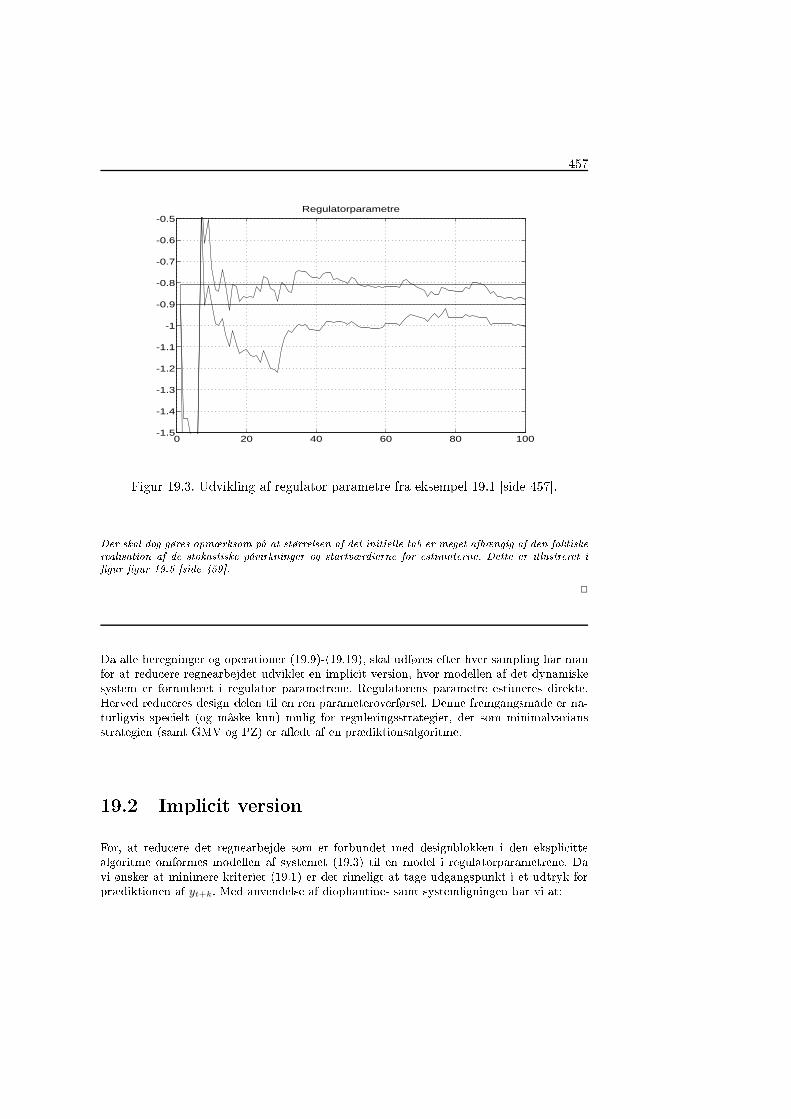
457
0 20 40 60 80 100-1.5
-1.4
-1.3
-1.2
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.5Regulatorparametre
Figur 19.3. Udvikling af regulator parametre fra eksempel 19.1 [side 457.Der skal dog gøres opmærksom på at størrelsen af det initielle tab er meget afhængig af den faktiskerealisation af de stokastiske påvirkninger og startværdierne for estimaterne. Dette er illustreret igur gur 19.5 [side 459.2Da alle beregninger og operationer (19.9)-(19.19), skal udføres efter hver sampling har manfor at redu ere regnearbejdet udviklet en impli it version, hvor modellen af det dynamiskesystem er formuleret i regulator parametrene. Regulatorens parametre estimeres direkte.Herved redu eres design delen til en ren parameteroverførsel. Denne fremgangsmåde er na-turligvis spe ielt (og måske kun) mulig for reguleringsstrategier, der som minimalvariansstrategien (samt GMV og PZ) er aedt af en prædiktionsalgoritme.19.2 Impli it versionFor, at redu ere det regnearbejde som er forbundet med designblokken i den ekspli ittealgoritme omformes modellen af systemet (19.3) til en model i regulatorparametrene. Davi ønsker at minimere kriteriet (19.1) er det rimeligt at tage udgangspunkt i et udtryk forprædiktionen af yt+k. Med anvendelse af diophantine- samt systemligningen har vi at:

458 19.2 Impli it version
0 20 40 60 80 100
50
100
150
200
Akkum. Regulerings- og estimationstab
Acc.
Los
s
Figur 19.4. Akkumuleret tabsfunktioner fra eksempel 19.1 [side 457. Teoretisk (+)og aktuel (−). Bemærk, at Jr(t) jvf (19.27) har størst stigning.C(q−1)yt+k =
h
A(q−1)G(q−1) + q−kS(q−1)
i
yt+k (19.29)= G(q−1)A(q−1)yt+k + S(q−1)yt (19.30)= G(q−1)
h
q−kB(q−1)ut+k + C(q−1)et+k
i
+ S(q−1)yt
=ˆ
B(q−1)G(q−1)ut + S(q−1)yt
˜
+ C(q−1)G(q−1)et+k
=ˆ
R(q−1)ut + S(q−1)yt
˜
+C(q−1)G(q−1)et+kBemærk, at dette er en alternativ model for systemet samt at regulatorpolynomierne, R og Sindgår i denne beskrivelse. Desuden indgår C-polynomiet. I forbindelse med den ekspli itteminimalvariansregulator fandt vi at hvis C = 1 kan parametrene estimeres med en RLS-algoritme (eller en variant heraf, der er konstrueret til tidsvarierende systemer). Hvis C 6=1(erethjereordenspolynomie må vi i de ekpli itte algoritmer anvende en RML- eller enRELS-algoritme. Lad os derfor først undersøge dette spe ialtilfælde (C = 1) i forbindelsemed den impli itte basale selvindstiller.19.2.1 Basal impli it selvindstiller for ARX-systemLad os nu betragte tilfældet C(q−1) = 1. I dette tilfælde gælder der jvf. (19.31) at:
yt+k =ˆ
S(q−1)yt +R(q−1)ut
˜
+G(q−1)et+k (19.31)
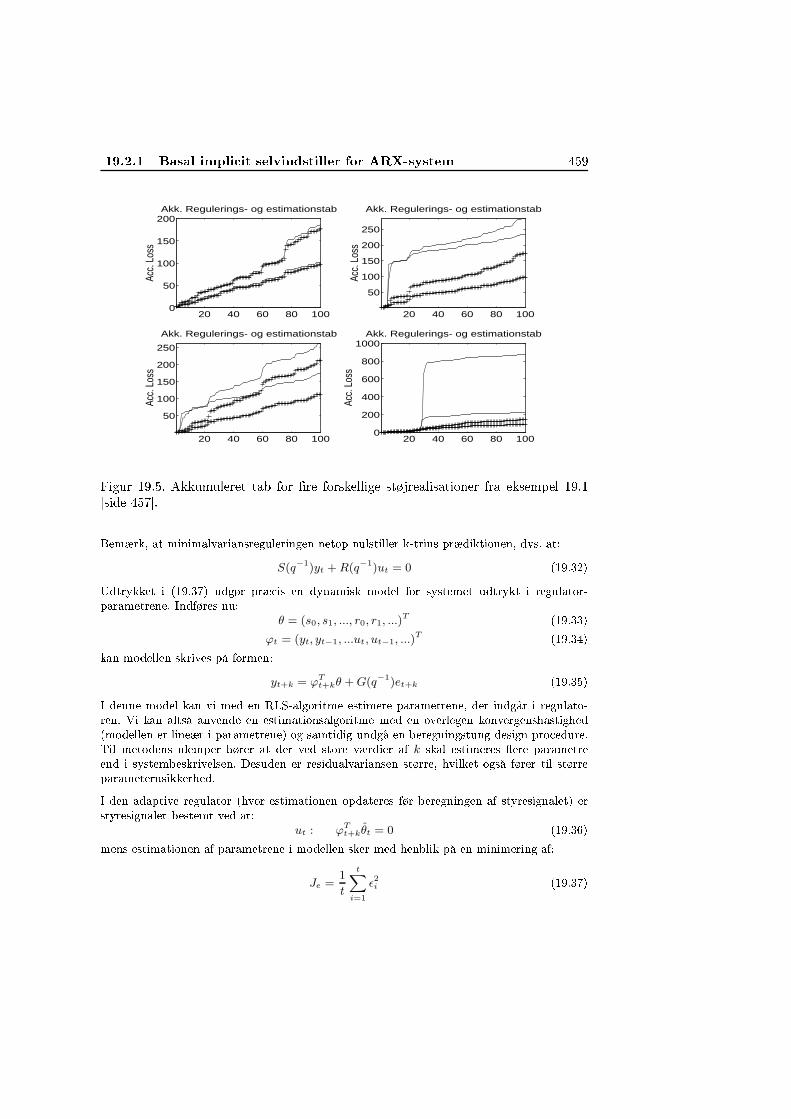
19.2.1 Basal impli it selvindstiller for ARX-system 45920 40 60 80 100
0
50
100
150
200Akk. Regulerings- og estimationstab
Acc.
Los
s
20 40 60 80 100
50
100
150
200
250
Akk. Regulerings- og estimationstab
Acc.
Los
s
20 40 60 80 100
50
100
150
200
250
Akk. Regulerings- og estimationstab
Acc.
Los
s
20 40 60 80 1000
200
400
600
800
1000Akk. Regulerings- og estimationstab
Acc.
Los
s
Figur 19.5. Akkumuleret tab for re forskellige støjrealisationer fra eksempel 19.1[side 457.Bemærk, at minimalvariansreguleringen netop nulstiller k-trins prædiktionen, dvs. at:S(q−1)yt +R(q−1)ut = 0 (19.32)Udtrykket i (19.37) udgør præ is en dynamisk model for systemet udtrykt i regulator-parametrene. Indføres nu:θ = (s0, s1, ..., r0, r1, ...)
T (19.33)ϕt = (yt, yt−1, ...ut, ut−1, ...)
T (19.34)kan modellen skrives på formen:yt+k = ϕ
Tt+kθ +G(q−1)et+k (19.35)I denne model kan vi med en RLS-algoritme estimere parametrene, der indgår i regulato-ren. Vi kan altså anvende en estimationsalgoritme med en overlegen konvergenshastighed(modellen er lineær i parametrene) og samtidig undgå en beregningstung design pro edure.Til metodens ulemper hører at der ved store værdier af k skal estimeres ere parametreend i systembeskrivelsen. Desuden er residualvariansen større, hvilket også fører til størreparameterusikkerhed.I den adaptive regulator (hvor estimationen opdateres før beregningen af styresignalet) erstyresignalet bestemt ved at:
ut : ϕTt+kθt = 0 (19.36)mens estimationen af parametrene i modellen sker med henblik på en minimering af:
Je =1
t
tX
i=1
ǫ2i (19.37)
460 19.2 Impli it versionhvor:yt = ϕtθt−1 + ǫt (19.38)Vi ser, at der med reguleringen efter (19.12) er en meget nøje sammenhæng mellem regule-ringskriteriet,Jr = Ey2
t+k (19.39)og estimationskriteriet, (19.37). Dette er en af de impli itte algoritmers - og i dette tilfælde- den basale impli itte selvindstillers fordele.Eksempel: 19.2 Betragt et stokastisk system givet ved:yt − 0.9yt−1 = 1.0ut−2 + et et ∈ Niid(0, σ2) (19.40)Antag, at systemstrukturen (type, ordener og tidsforsinkelse) er kendt, dvs. at en systemmodel afformen:
yt + ayt−1 = but−2 + et (19.41)ligger til grund. Idet na = 1 og nc = nb = 0, k = 2 er:G(q−1) = 1 + gq−1 og S(q−1) = s0 (19.42)Til bestemmelse af regulatorparametrene har vi at:
1 = (1 + aq−1)(1 + gq−1) + q−2s0 (19.43)eller at:R(q−1) = B(q−1)G(q−1) = b(1 − aq−1) = r0 + r1q−1 (19.44)S(q−1) = s0 = a2 (19.45)dvs. at reguleringen er givet ved:
ut = − 1
r0(s0yt + r1ut−1) (19.46)I stedet for at estimere parametrene i systemmodellen kan vi estimere parametrene i en model iregulatorparametrene. Dvs. i:
yt = s0yt−2 + r0ut−2 + r1ut−3 + ǫt (19.47)Bemærk, at for korrekte estimater er:ǫt = (1 + gq−1)et = et + get−1 (19.48)ikke korelleret med regressorerne i (19.47). Den adaptive regulering består da i at nulstille (k-trins)prædiktionen, dvs.:
ut : s0yt + r0ut + r1ut−1 = 0 (19.49)219.2.2 Basal impli it selvindstiller for ARMAX-systemLad os nu vende tilbage til de generelle tilfælde hvor C 6= 1. I forbindelse med ekspli ittealgoritmer var det i dette tilfælde nødvendig at anvende en beregningstung algoritme somRML- eller RELS-algoritmen. Ud fra (19.31) kan vi skrive:
yt+k =1
C(q−1)
ˆ
S(q−1)yt +R(q−1)ut
˜
+G(q−1)et+k (19.50)

19.2.2 Basal impli it selvindstiller for ARMAX-system 461eller som:yt+k =
1
C(q−1)ϕ
Tt θ +G(q−1)et+k (19.51)Vi ved, at hvis en algoritme konvergerer, vil den konvergere mod et parameterpunkt, der erkendetegnet ved, at der ikke eksisterer nogen korrelation mellem residualer og regressorer.Da nu reguleringen sikrer at:
S(q−1)yt +R(q−1)ut = ϕTt θ = 0 (19.52)er det muligt at estimere parametre i modellen:
yt+k =ˆ
S(q−1)yt +R(q−1)ut
˜
+ ǫt+k = ϕTt θ + ǫt+k (19.53)Minimalvariansreguleringen er et muligt konvergenspunkt idet
ǫt = G(q−1)et (19.54)er uafhængig af regressorerne i ϕt−k for korrekte estimater.Eksempel: 19.3 Betragt nu et stokastisk system givet ved:yt − 0.9yt−1 = 1.0ut−2 + et − 0.7et−1 et ∈ Niid(0, σ2) (19.55)Antag, at systemstrukturen (type, ordener og tidsforsinkelse) er kendt, dvs. at en model af formen:
yt + ayt−1 = but−2 + et + cet−1 (19.56)ligger til grund. Idet na = nc = 1 og nb = 0, k = 2 er:G(q−1) = 1 + gq−1 og S(q−1) = s0 (19.57)Til bestemmelse af regulatorparametrene har vi at:(1 + cq−1) = (1 + aq−1)(1 + gq−1) + q−2s0 (19.58)eller at:
R(q−1) = B(q−1)G(q−1) = b(1 + (c − a)q−1) = r0 + r1q−1 (19.59)S(q−1) = s0 = −a(c − a) (19.60)dvs. at reguleringen er givet ved:
ut = − s0yt + r1ut−1
r0(19.61)I den adaptive algoritme estimeres parametrene i modellen:
yt = s0yt−2 + r0ut−2 + r1ut−3 + ǫt (19.62)med en RLS-algoritme. Reguleringen foregår ved at nulstille k−trins prædiktionen (her 2-trinsprædiktionen), dvs. ved at:ut =
s0yt + r1ut−1
r0(19.63)
2Vi ikke i denne nødversion af noterne komme ind på det meget vigtige spørgsmål om hvorvidtden basale selvindstiller konvergerer, men kun berører det langt enklere forhold for hvad derer karakteristisk hvis selvindstilleren er konvergeret. I den forbindelse har vi følgende sætningder anføres uden bevis.
462 19.2 Impli it versionSætning: 19.1 Hvis estimaterne er konvergeret gælder at:Eytǫt+j = 0 for j = k, k + 1, ...k + nf (19.64)Eutǫt+j = 0 for j = k, k + 1, ...k + ng (19.65)(19.66)
2Sætning: 19.2 Hvis estimaterne konvergerer vil reguleringen konvergere mod en minimalva-riansregulering. 2Det bemærkes at sætningerne ikke garanterer konvergens, men blot at hvis estimaternekonverger, så vil de konvergerer mod et punkt (i parameterrummet) der giver de angivneegenskaber.

Kapitel 20Ekspli itte Selvindstillere.I det forrige kapitel har vi beskæftiget os med en adaptiv minimalvarians regulering. Denresulterende selvindstillende regulator eksisterer både i en ekspli it og en i en impli it version.I dette kapitel skal vi beskrive ekspli itte selvindstillere i almindelighed. En selvindstiller eren adaptiv regulator baseret på ertainty equivalen e prin ippet, dvs. at ukendte parametreblot erstattes af estimater. En selvindstiller siges at være ekspli it, hvis adaptionen sker vedat systemets parametre estimeres.yt
IDDesign SystemControllerwt
ut
et
Figur 20.1. Prin ipskitse for en selvindstillerI en ekspli it selvindstiller overføres kun estimatet af systemets parametre til en designblok,der på grundlag af kriterium og restriktioner bestemmer et sæt regulatorparametre. Dis-se regulatorparametre overføres til den egentlige regulator, der foretager bestemmelsen afstyresignalet. 463

464 20.1 Ekspli it MV0-regulatorKlassen af ekspli itte selvindstillere er nok den mest omfattende idet næsten enhver regule-ringsstrategi kan kombineres med en passende identikations algoritme. Der kræves blot atidentikationsdelens modelstruktur passer sammen med designblokken for reguleringen.I de efterfølgende afsnit vil der blive diskuteret forskellige eksempler på ekspli itte selvindstil-lere. Først vil den selvindstillende MV0 regulator blive diskuteret. Dernæst vil der blive gen-nemgået forskellige algoritmer der kræver en redu eret styreeekt (i forholdMV0−regulatoren).I de beskrevne algoritmer tages der udgangspunkt i en ARMAX struktur. Resultaterne kantransformeres til både en BJ- og en L-struktur (under passende hensyntagen til indgåendefælles faktorer).20.1 Ekspli it MV0-regulatorDen basale minimalvariansregulator er bl.a. karakteriseret ved at fokusere på reguleringspro-blemet. Den ekspli itte MV0−regulator er designet til dels at håndtere referen eændringerog en eventuelt konstant forstyrrelse. Den adaptive reguleringsform er ekspli it, dvs. at derestimeres parametre i en systemmodel, der via en designalgoritme omsættes til den egentligeregulator.20.1.1 IdentikationParametrene i modellenA(q−1)yt = q
−kB(q−1)ut + C(q−1)ǫt + d (20.1)eller:
yt = ϕTt θt + ǫt (20.2)hvor:
ϕTt = (−yt−1, ...ut−k, ..., ǫt−1, ..., 1) (20.3)θ
T = (a1, ..., b0, ..., c1, ..., d) (20.4)bestemmes med rekursionerne:ǫt+1 = yt+1 − ϕ
Tt+1θt (20.5)
P−1t+1 = P
−1t + ψt+1ψ
Tt+1 (20.6)
θt+1 = θt + Pt+1ψt+1ǫt+1 (20.7)hvor:ψt =
1
C(q−1)ϕt (20.8)hvis der anvendes en RML-metode. Hvis der f.eks. af hensyn til beregningstiden anvendesen RELS-metode er ψt blot erstattet af ϕt.

20.1.2 Design 46520.1.2 DesignPå basis af de estimerede parametre bestemmes G og S-polynomierne ud fra diophantine-ligningen:C(q−1) = A(q−1)G(q−1) + q
−kS(q−1) (20.9)hvor:
ng = k − 1 ns = max(na − 1, nc − k) (20.10)Reguleringen:R(q−1)ut = Q(q−1)wt − S(q−1)yt − ξ0 (20.11)er i dette tilfælde givet ved:
R(q−1) = BG(q−1) (20.12)Q(q−1) = C(q−1) (20.13)
ξ0 = G(1)d (20.14)eller samlet som:B(q−1)G(q−1)ut = C(q−1)wt − S(q−1)yt −G(1)d (20.15)20.1.3 RegulatorSamlet kan regulatoren skrives som:
S(q−1)yt +R(q−1)ut −Q(q−1)wt + ξ0 = 0 (20.16)Hvis vektorene:γ
Tt = (yt, ..., ut, ...,−wt, ..., 1) (20.17)ogϑ
Tt = (s0, ..., r0, ..., q0, ..., ξ0) (20.18)indføres kan vi udtrykke regulatoren som:
γTt ϑt = 0 (20.19)20.2 Ekspli it Polpla eringDen klassiske MV0−regulator er kendt for at kræve en ret stor styreeekt. Polpla erings-regulatorerne er en udvikling i forhold til MV0−regulatoren, der neddrosler styreeekten.Desuden kan man med polpla eringsreguleringen håndtere systemer med nulpunkter udenforenheds irklen (ved en passende faktorisering af B−polynomiet).

466 20.2 Ekspli it Polpla ering20.2.1 IdentikationParametrene i modellenA(q−1)yt = q
−kB(q−1)ut + C(q−1)ǫt + d (20.20)eller:
yt = ϕTt θt + ǫt (20.21)hvor:
ϕTt = (−yt−1, ...ut−k, ..., ǫt−1, ..., 1) (20.22)θ
T = (a1, ..., b0, ..., c1, ..., d) (20.23)bestemmes med rekursionerne:ǫt+1 = yt+1 − ϕ
Tt+1θt (20.24)
P−1t+1 = P
−1t + ψt+1ψ
Tt+1 (20.25)
θt+1 = θt + Pt+1ψt+1ǫt+1 (20.26)hvor:ψt =
1
C(q−1)ϕt (20.27)hvis der anvendes en RML-metode. Hvis der f.eks. af hensyn til beregningstiden anvendesen RELS-metode er ψt blot erstattet af ϕt.20.2.2 DesignI forbindelse med polpla eringsregulering skal systemets nulpunkter opdeles i nulpunkter,der ønskes plomberet, dvs. er indeholdt i B+ og nulpunkter, der ikke ønskes (eller ikke kan)plomberes. B-polynomiet skal med andre ord faktoriseres:
B(q−1) = B−(q−1)B+(q−1) (20.28)Denne beregningstunge operation kan redu eres ved to spe ialtilfælde. Hvis alle systemetsnulpunkter vides at være indenfor stabilitetsområdet, kan det vælges at:B− = 1 B+(q−1) = B(q−1) (20.29)hvorved PZ-reguleringen fremkommer. Hvis der modsat vælges at:B+ = 1 B−(q−1) = B(q−1) (20.30)fremkommer en regulering hvor ingen af systemets nulpunkter plomberes. På baggrund afdet faktoriserede B-polynomium bestemmes G og S-polynomierne ud fra:
C(q−1)Am(q−1) = A(q−1)G(q−1) + q−kB−(q−1)S(q−1) (20.31)hvor Am og Bm er knyttet til kriteriet:
Jr = E(Amyt+k −Bm1B−wt)2 (20.32)

20.2.3 Regulator 467Dvs. B− er en faktor i Bm = Bm1B−. Dette kriterium er kun minimeret ved PZ-regulering(dvs. hvor B− = 1). Ved de andre polpla eringsstrategier ndes (kun) en suboptimal løsning.Regulatoren:R(q−1)ut = Q(q−1)wt − S(q−1)yt − ξ0 (20.33)er i dette tilfælde givet ved:
R(q−1) = B+G(q−1) (20.34)Q(q−1) = Bm1 (q−1)C(q−1) (20.35)
ξ0 =G(1)
B−(1)d (20.36)eller ekspli it ved:
B+(q−1)G(q−1)ut = Bm1(q−1)C(q−1)wt − S(q−1)yt − G(1)
B−(1)d (20.37)I visse tilfælde (f.eks. i den kvasideterministiske grænse) kan der med fordel anvendes et fast(prædetermineret) polynomium i stedet for det estimerede C−polynomium.20.2.3 RegulatorRegulatoren:
S(q−1)yt +R(q−1)ut −Q(q−1)wt + ξ0 = 0 (20.38)kan ved indførsel af vektorene:γ
Tt = (yt, ..., ut, ...,−wt, ..., 1) (20.39)ϑ
Tt = (s0, ..., r0, ..., q0, ..., ξ0) (20.40)skrives som:
γTt ϑt = 0 (20.41)20.3 Ekspli it GMV-reguleringI forhold til minimalvarians regulatoren kan man med den generaliserede minimalvariansregulator indføre en frekvensvægtning på i kriteriet indgående signaler. Herunder en fre-kvensvægt på styreindgrebet. Man har bl.a. mulighed for adaptivt at styre ikke minimumfasesystemer. Selve GMV som reguleringsform ar beskrevet i kapitel 10.6.20.3.1 IdentikationParametrene i modellen
A(q−1)yt = q−kB(q−1)ut + C(q−1)ǫt + d (20.42)eller:
yt = ϕTt θt + ǫt (20.43)
468 20.3 Ekspli it GMV-reguleringhvor:ϕ
Tt = (−yt−1, ...ut−k, ..., ǫt−1, ..., 1) (20.44)θ
T = (a1, ..., b0, ..., c1, ..., d) (20.45)bestemmes med rekursionerne:ǫt+1 = yt+1 − ϕ
Tt+1θt (20.46)
P−1t+1 = P
−1t + ψt+1ψ
Tt+1 (20.47)
θt+1 = θt + Pt+1ψt+1ǫt+1 (20.48)hvor:ψt =
1
C(q−1)ϕt (20.49)hvis der anvendes en RML-metode. Hvis der f.eks. af hensyn til beregningstiden anvendesen RELS-metode er ψt blot erstattet af ϕt.20.3.2 DesignMålet med GMV-regulering er at minimere kriteriet:
Jr = E
(
„
By(q−1)
Ay(q−1)yt+k − Bw(q−1)
Aw(q−1)wt
«2
+ ρ
„
Bu(q−1)
Au(q−1)ut
«2) (20.50)hvor:
Ay(0) = Aw(0) = Au(0) = Bu(0) = 1 (20.51)Ved hver sampling løses diophantineligningen:C(q−1)By(q−1) = Ay(q−1)A(q−1)G(q−1) + q
−kS(q−1) (20.52)med hensyn til G og S. Her er G(0) = 1 og:
ng = k − 1 ns = max(na + nay − 1, nc + nby − k) (20.53)Regulatoren kan generelt skrives som:R(q−1)ut = Q(q−1)wt − S(q−1)yt − ξ0 (20.54)hvor:
R(q−1) = Au(q−1)BG(q−1) + αBu(q−1)C(q−1) (20.55)Q(q−1) = C(q−1) (20.56)
ξ0 = G(1)d (20.57)ogα =
ρ
b0(20.58)De indgående signaler:
yt =1
Ay
yt ut =1
Au
ut wt =Bw
Aw
wt (20.59)er fremkommet ved ltrering gennem overføringsfunktioner, der er givet ved kriteriet (ogikke det ukendte system).

20.3.3 Regulator 46920.3.3 RegulatorS(q−1)yt +R(q−1)ut −Q(q−1)wt + ξ0 = 0 (20.60)
γTt = (yt, ..., ut, ...,−wt, ..., 1) (20.61)ϑ
Tt = (s0, ..., r0, ..., q0, ..., ξ0) (20.62)
γTt ϑt = 0 (20.63)20.4 Ekspli it LQG-regulatorLQG-regulatoren er beskrivet som reguleringsform i afsnit 10.8 [side 355. Regulatoren ud-mærker sig ved at kunne håndtere ikke minimumfasesystemet samt system med en ikkeveldeneret tidsforsinkelse.20.4.1 IdentikationParametrene i modellen
A(q−1)yt = q−kB(q−1)ut + C(q−1)ǫt + d (20.64)eller:
yt = ϕTt θt + ǫt (20.65)hvor:
ϕTt = (−yt−1, ...ut−k, ..., ǫt−1, ..., 1) (20.66)θ
T = (a1, ..., b0, ..., c1, ..., d) (20.67)bestemmes med rekursionerne:ǫt+1 = yt+1 − ϕ
Tt+1θt (20.68)
P−1t+1 = P
−1t + ψt+1ψ
Tt+1 (20.69)
θt+1 = θt + Pt+1ψt+1ǫt+1 (20.70)hvor:ψt =
1
C(q−1)ϕt (20.71)hvis der anvendes en RML-metode. Hvis der f.eks. af hensyn til beregningstiden anvendesen RELS-metode er ψt blot erstattet af ϕt.
470 20.4 Ekspli it LQG-regulator20.4.2 DesignMålet med en LQG-regulering af et system beskrevet af en ekstern model er (i regulerings-tilfældet dvs. for wt = 0 og d = 0) at minimerere kriteriet:Jt = lim
N→∞E
(
1
N
NX
i=t
y2i + ρu
2i
) (20.72)LQG-regulatoren kan udvides til at inkludere et referen esignal. Regulatoren designes vedførst af foretage en spektralfaktorisering og bestemme lukketsløjfe polerne. Dette sker vedat bestemme den stabile løsning til:P (q−1)P (q) = B(q−1)B(q) + ρA(q−1)A(q) (20.73)Derefter bestemmes regulatorpolynomierne ved diophantineligningen:
P (q−1)C(q−1) = A(q−1)R(q−1) + q−kB(q−1)S(q−1) (20.74)og der anvendes regulatoren givet ved:
R(q−1)ut = Q(q−1)wt − S(q−1)yt − ξ0 (20.75)hvor:Q(q−1) = ηC(q−1) (20.76)og:
ξ0 = G(1)d η =P (1)
B(1)(20.77)20.4.3 RegulatorPå sædvanlig vis kan reguleringen bringes på formen:
S(q−1)yt +R(q−1)ut −Q(q−1)wt + ξ0 = 0 (20.78)der med:γ
Tt = (yt, ..., ut, ...,−wt, ..., 1) (20.79)og:ϑ
Tt = (s0, ..., r0, ..., q0, ..., ξ0) (20.80)kan skrives som:
γTt ϑt = 0 (20.81)
Kapitel 21Impli itte Selvindstillere.Det er i visse tilfælde muligt at omforme modellen for det forelagte system til en beskrivelseder indeholder de parametre, der indgår i regulatoren. Når dette er tilfældet er det muligtat estimere regulatorparametrene direkte, i stedet for først at estimere systemets parametreog derefter foretage en omregning via et design kriterium til et sæt regulator parametre. Enselvindstiller, der er baseret på en estimation af regulatorens parametre, betegnes som enimpli it selvindstiller.Den helt klare fordel ved direkte at estimere regulatorens parametre er et redu eret bereg-ningsarbejde. Dette er spe ielt interessant i forbindelse med hurtige pro esser. Det er imid-lertid en ulempe at antallet af parametre, der skal estimeres, vokser med tidsforsinkelsen gen-nem systemet. De regulatortyper, for hvilket det er muligt at omforme systembeskrivelsen tilen beskrivelse i regulatorparametrene, er regulatorer, der er relateret til prædiktive metodereller sagt med ord, er udvidelser af minimalvariansregulatoren. For disse reguleringsstrate-gier er det muligt at sammenbygge systembeskrivelse og designkriterium (f. eks. polynomierder indgår i samme) til en model i regulatorparametrene. Det må imidlertid betegnes somen ulempe at det er nødvendigt at genstarte parameterestimationen, hvis designkriterietændres. Som det blev påpeget i forbindelse med den impli itte minimalvariansregulator eren af fordelene den tætte relation mellem reguleringskriterium og estimationskriterium.I denne nødudgave af noterne vil vi betragte tre impli itte selvindstillende regulerings stra-tegier; nemlig en strategi baseret på enMV0-regulatoren, en strategi baseret på polpla ering(afsnit 10.3) og endelig en strategi baseret på den generaliserede minimalvariansregulator(afsnit 10.6).De adaptive strategier, der præsenteres i dette kapitel er alle baseret på det såkaldte ertaintyequivalen e prin ip, der indebærer at ukendte parametre i designfasen erstattes af estimateruden hensyntagen til deres usikkerhed.471
472 21.1 Impli it MV0-regulering21.1 Impli it MV0-reguleringMålet med en MV0-regulering er i stationaritet at minimere kriteriet:J = E
˘
(yt+k −wt)2¯ (21.1)under restriktionen at styresignalet, ut skal være en funktion af tilgængelig information, dvs.
Yt. En Impli it MV0-regulator er baseret på en model i regulatorparametrene. Vi har fraudledningen af MV0-regulatoren (og fra (19.31)) at:ζt+k = yt+k − wt (21.2)
=1
C(q−1)
ˆ
S(q−1)yt +B(q−1)G(q−1)ut − C(q−1)wt +G(1)d˜
+G(q−1)et+k (21.3)=
1
C(q−1)
ˆ
S(q−1)yt +R(q−1)ut − C(q−1)wt + ξ˜ (21.4)
+G(q−1)et+kHer er:ord(R) = nb + k − 1 ord(S) = max(na − 1, nc − k) (21.5)
ξ = G(1)d (21.6)Selve MV0-reguleringen foregår ved at nulstille k−trins prædiktionen af ζt, dvs. ved:S(q−1)yt +R(q−1)ut −C(q−1)wt + ξ = 0 (21.7)Der derfor muligt at estimere parametre i modellen:
ζt = S(q−1)yt−k +R(q−1)ut−k − C(q−1)wt−k + ξ + et (21.8)med f.eks. RLS (evt. suppleret med en udvidelse til estimation af tidsvarierende parametre).Her er:et = G(q−1)et (21.9)enM(k)-pro es for korrekte parameterestimater. Dermed er et ukorreleret med regressorerneog de korrekte parametre er et mulig konvergenspunkt for algoritmen. Bemærk, at dette kuner korrekt når styringen sker efter (21.7). Indføres nu:
ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)T (21.10)
θ = (s0, ..., r0, ..., q0, ..., ξ)T (21.11)kan parametrene i modellen:ζ = ϕ
Tt θt−1 + ǫt (21.12)estimeres med en RLS-algoritme, forudsat at der anvendes en MV0-regulator, der nulstiller
k−trinsprædiktionen af ζt, dvs.:ut : ϕ
Tt+kθt = 0 (21.13)(her formuleret som en adaptiv regulator, der bestemmer styresignalet på baggrund af etopdateret estimat af parametrene).Vi kan nu opsummere punkterne i den impli itte selvindstillende MV0-regulator.

4731 Mål yt.2 Dan ζt = yt − wt−k.3 Dan ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)T .4 Opdater parameterestimatet:
ǫt = ζt − ϕtθt−1 (21.14)P
−1t = P
−1t−1 + ϕtϕ
Tt (21.15)
θt = θt−1 + Ptϕtǫt (21.16)5 Bestem ut således at:ϕ
Tt+kθt = 0 (21.17)6 Eektuer styreindgrebet.Det erindres af RLS-algoritmen kan suppleres således at den adaptive regulator er i standtil at følge tidsvarierende parametre. Sædvanligvis kseres en eller ere parametre, f.eks. b0og c0 der kendes (c0=1).21.2 Impli it PZ-reguleringSom nævnt i kapitel 10 involverer stokastisk polpla ering en faktorisering af B-polynomiet ito polynomier, der enten indeholder de nulpunkter, der ønskes plomberet, eller indeholder denulpunkter der enten ikke ønskes eller ikke kan plomberes. I en adaptiv sammenhæng tygerman ofte til et af to yderpunkter. Dvs. enten at ikke plombere nogen nulpunkter eller ogsåat plombere alle nulpunkter (med en dermed følgende begrænsning i klassen af systemer derkan styres).Målet med en PZ-regulering er i stationaritet at minimere:
J = E(Am(q−1)yt+k −Bm(q−1)wt)2 (21.18)En impli it PZ-regulator er baseret på en model i regulatorparametrene. Vi har fra udled-ningen af PZ-regulatoren at:
ζt+k = Am(q−1)yt+k −Bm(q−1)wt (21.19)=
1
C(q−1)
ˆ
S(q−1)yt +B(q−1)G(q−1)ut (21.20)−Bm(q−1)C(q−1)wt +G(1)d
˜
+G(q−1)et+k (21.21)(21.22)og at PZ-regulatoren:ut =
1
B(q−1)G(q−1)
˘
Bm(q−1)C(q−1)wt − S(q−1)yt −G(1)d¯ (21.23)nulstiller k-trinsprædiktionen af ζt. Der gælder at:
G(0) = 1 ord(G) = k − 1 ord(S) = max(na − 1, nc + nAm − k) (21.24)

474 21.2 Impli it PZ-reguleringIdet PZ-reguleringen netop nulstiller k-trins prædiktionen af ζt, dvs.S(q−1)yt +R(q−1)ut −Q(q−1)wt + ξ = 0 (21.25)hvor:
R(q−1) = B(q−1)G(q−1) = g0 + g1q−1 + ... (21.26)
Q(q−1) = Bm(q−1)C(q−1) = q0 + q1q−1 + ... (21.27)
ξ = G(1)d (21.28)kan den adaptive PZ-regulator baseres på estimation af parametrene i modellen:ζt = Am(q−1)yt −Bm(q−1)wt−k (21.29)
= S(q−1)yt−k +R(q−1)ut−k −Q(q−1)wt−k + ξ + et (21.30)hvor der for korrekte estimater gælder at:et = G(q−1)et = et + ...+ gk−1et+1−k (21.31)er en MA(k-1)-pro es, der er ukorreleret med regressorerne, yt−k, yt−k−1, ..., ut−k, ut−k−1,
.... Indføres:ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)
T (21.32)θ = (s0, ..., r0, ..., q0, ..., ξ)
T (21.33)gælder der at i den adaptive PZ-regulator estimeres parametrene i modellen:ζt = ϕ
Tθt−1 + ǫt (21.34)mens styresignalet bestemmes ved:
ut : ϕTt+kθt = 0 (21.35)Den adaptive PZ-regulator kan beskrives med følgende punkter, der udføres i hver sampling.1 Mål yt.2 Dan ζt = Am(q−1)yt −Bm(q−1)wt−k.3 Dan ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)
T .4 Opdater parameterestimatet:ǫt = ζt − ϕtθt−1 (21.36)
P−1t = P
−1t−1 + ϕtϕ
Tt (21.37)
θt = θt−1 + Ptϕtǫt (21.38)5 Bestem ut således at: ϕTt+kθt = 0 .

47521.3 Impli it GMV-reguleringMålet med en GMV-regulering er i stationaritet at minimere:Jr = E
˘
[yt+k − wt]2 + ρu
2t
¯ (21.39)hvor:yt =
By
Ay
yt wt =Bw
Aw
wt ut =Bu
Au
ut (21.40)Her er polynomierne, Ay, Aw, Bu og Au moniske. En impli it GMV-regulator er baseret påen model i regulatorparametrene. Der indføres derfor (se afsnit 10.6 [side 347) signalerne:yt =
1
Ay
yt ut =1
Au
ut wt = wt =Bw
Aw
wt (21.41)Vi ved fra udledningen af GMV-regulatoren at GMV-regulering svarer til en minimalvariansregulering af størrelsen ζt hvor:ζt = yt − wt−k + αut (21.42)hvor:
α =ρ
b0(21.43)Designet af en GMV-regulator involverer en løsning af Diophantine ligningen:
ByC = AyAG+ q−kS (21.44)mht. til polynomierne, G og S, hvor:
ord(G) = k − 1 ord(S) = max(na + nay − 1, nc + nBu − k) (21.45)G(0) = 1 (21.46)og reguleringen er bestemt ved:
ut =1
R(q−1)
˘
C(q−1)wt − S(q−1)yt − ξ¯ (21.47)hvor:
R = AuBG+ αBuC ξ = G(1)d (21.48)Vi kan som i afsnit 10.6 [side 347 omskrive systembeskrivelsen til:ζt+k = yt+k − wt + αut (21.49)
=1
C(q−1)
˘
S(q−1)yt +R(q−1)ut − C(q−1)wt +G(1)d¯ (21.50)
+G(q−1)et+k (21.51)der er en model i regulatorparametrene. Idet GMV-regulatoren nulstiller k-trinsprædiktionenaf ζt kan regulatorparametrene estimere med f.eks. RLS i modellen:ζt = Syt−k +Rut−k − Cwt−k + ξ + et (21.52)

476 21.3 Impli it GMV-reguleringFor korrekte estimater er fejlen, et, en MA(k-1)-pro es, der er ukorreleret med regressorerne,hvilket er en nødvendig betingelse for at de korrekte parametre er et konvergenspunkt forden adaptive regulator.Indføres nu vektorene:ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)
T (21.53)θ = (s0, ..., r0, ..., c0, ..., ξ)
T (21.54)kan parametrene i modellen:ζt = ϕ
Tt θt−1 + ǫt (21.55)estimeres med en RLS-algoritme, forudsat der anvendes en GMV-regulator, der nulstiller
k−trins prædiktionen af ζt, dvs.:ut : ϕ
Tt+kθt = 0 (21.56)Bemærk, at c0 = 1 kendes og derfor ofte kseres.Vi kan afslutningsvis angive den adaptive GMV-regulator med følgende punkter der udføresved hver sampling.1 Mål yt.2 Dan ζt = yt − wt−k + αut−k.3 Dan yt, ut og wt.4 Dan ϕt = (yt−k, ..., ut−k, ...,−wt−k, ..., 1)
T og ϕt+k.5 Opdater parameterestimatet:ǫt = ζt − ϕtθt−1 (21.57)
P−1t = P
−1t−1 + ϕtϕ
Tt (21.58)
θt = θt−1 + Ptϕtǫt (21.59)6 Bestem ut således at: ϕTt+kθt = 0.7 Bestem ut = Auut.Det bemærkes afslutningsvis at de impli itte selvindstillere kan, selv for C(q−1) 6= 1, baserespå en RLS-algoritme og at der er en meget nøje overensstemmelse med estimationskriteriumog det egentlige reguleringskriterium. Til gengæld kræver de impli itte algoritmer et retpræ ist estimat af tidsforsinkelsen gennem systemet.
Del VDel 5: Appendi es
477


Bilag ATransformationerI forbindelse med bl. a. analyse af signaler og dynamiske systemer eksisterer en række mate-matiske værktøjer, der er meget nyttige. Vi skal i dette appendix beskæftige os med forskel-lige transformationsteknikker herunder Fourier-, Lapla e- og Z-transformationen. Dettekapitel er hovedsagelig baseret på (Gabel & Roberts 1973).A.1 FouriertranformationenDet er ofte interessant at beskrive et signals frekvensindhold. I forbindelse med beskrivelseaf dynamiske systemer har vi ofte brug for at kunne angive hvorledes et dynamisk sy-stem forstærker de forskellige frekvenser som et signal indeholder. Når vi taler om lineæretidsinvariante dynamiske systemer da er det netop en systemegenskab hvorledes systemettransformerer de enkelte frekvenser.Denition: A.1 Lad f(t) være en funktion af t (hvor t ∈ R). Da er den fouriertransfor-merede, F (ω) , af f(t) deneret ved:F (ω) =
Z ∞
−∞f(t)e−jωt
dt F (ω) = F [f(t)] (A.1)forudsat integralet eksisterer. 2Bemærk, at for f(t) ∈ R (hvilket er opfyldt for sædvanlige signaler) gælder der at:F
∗(ω) = F (−ω) (A.2)479

480 A.1 FouriertranformationenHer angiver F ∗ den komplekskonjugerede af F . Omvendt kan tidsfunktionen, f(t), bestem-mes af:f(t) =
1
2π
Z ∞
−∞F (ω)ejωt
dω (A.3)Vi kan fortolke invertionsformlen som en (kontinuert) dekomposition af f(t) i den elementæ-re basis funktion, ejωt. Det bemærkes, at F (ω) (på nær faktoren 2π) er en tæthedsfunktion,der angiver hvorledes f(t) er fordelt over frekvensområdet. F (ω) betegnes som det kontinu-erte frekvensspektrum af f(t) og er generelt en komplex funktion af den reelle variable ω(vinkelfrekvens). Bemærk, at F (ω) er en funktion af ω, hvor ω ∈ R, og at F (ω) derfor haren fouriertransformeret, der netop er f(t). Vi siger at f(t) og F (ω) danner et transforma-tionspar. F (ω)kan skrives på formen:F (ω) = |F (ω)| ejθ(ω) (A.4)Her er |F (ω)| det kontinuerte amplitudespektrum og θ(ω) er det tilsvarende fasespektrumfor f(t).Ikke alle funktioner kan blive udviklet i et kontineum af komplekse eksponentialer ejωt, dvs.har en fouriertransformation. Derimod, hvis en funktion har en fouriertransformation, daer denne transformation og dens inverse entydig. Givet en tidsfunktion eksisterer der kunen fouriertransformation af denne og omvendt for en given fouriertransformation eksistererder kun en tilsvarende tidsfunktion. Det falder udenfor dette fags rammer at diskutereeksistensen af fouriertransformerede, men vi vil dog betragte to klasser af funktioner forhvilke den fouriertransformerede eksisterer, nemlig de såkaldte energi- og eekt signaler. Foren del af disse funktioner er det nødvendigt at anvende teorien for generaliserede funktionerog dermed tillade δ-funktioner i fouriertransformationerne.Energisignaler, dvs. signaler der har endelig energi er karakteriseret ved at
Z ∞
−∞f
2(t)dt (A.5)eksisterer og er begrænset. Tilsvarende er eektsignaler deneret ved at: eekten er begræn-set, dvs. at:lim
T→∞
1
T
Z T2
− T2
f2(t)dt (A.6)eksisterer og er begrænset.Eksempel: A.1 Rektangulær puls. Betragt en rektangulær puls med bredden τ :
gτ (t) =
»
1 for |t| ≤ 12τ
0 ellers (A.7)Denne funktion kaldes ofte en vinduesfunktion. Fouriertransformationen af gτ (t) er Gτ (ω) og ergivet ved:Gτ (ω) =
Z τ2
− τ2
1 · e−jωtdt =1
−jω
“
e−12
jωτ − e12
jωτ” (A.8)
= τsinc“ωτ
2
” (A.9)

A.1.1 Egenskaber 481Her er:sinc(x) =
sin(x)
x(A.10)For værdierne τ = 10, 2 er spektrumet plottet i gur gur A.1 [side 481. Bemærk, at spektret i dette
−10 −8 −6 −4 −2 0 2 4 6 8 10−4
−2
0
2
4
6
8
10Rektangulaer puls
Figur A.1. Spektrum for en rektangulær puls for bredden 10 se og 2 se tilfælde er reelt. Bemærk, at for τ voksende vil spektret blive mere spidst, hvorimod tidsfunktionenvil blive mere ad. Dette omvendte forhold mellem varigheden og båndbredden for et signal er etmeget vigtigt fysisk aspekt. 2A.1.1 EgenskaberI det følgende vil vi angive nogle regneregler for fouriertransformationen. Lad f(t) og F (ω)være et transformationspar (eller et fourierpar), dvs. at:F = F [f ] eller f(t) ↔ F (ω) (A.11)Der gælder følgende egenskaber:Symmetri: En meget vigtig egenskab ved transformationen er symmetrien i variablen af tog ω. Denne symmetriegenskab kan anvendes til udregning af fouriertransformationer. Dergælder at:
F [F (t)] = 2πf(−ω) (A.12)Linearitet: fouriertransformationen er en lineær operation. Dvs., at:F [af1(t) + bf2(t)] = aF [f1(t)] + bF [f2(t)] (A.13)hvor a og b er konstanter.

482 A.1 FouriertranformationenSkalering:F [f(at)] =
1
|a|F (ω
a) (A.14)hvor a er en reel konstant. Denne egenskab kvanti erer relationen mellem varigheden ogbåndbredden for en tidsfunktion.Foldning: Operationen:
y(t) =
Z ∞
−∞f1(t)f2(t− s)ds (A.15)mellem f1(t) og f2(t) betegnes som en foldning. Denne skrives som:
f1 ∗ f2 =
Z ∞
−∞f1(t)f2(t− s)ds (A.16)For foldning gælder den meget vigtige relation:
F [f1 ∗ f2] = F1(ω)F2(ω) (A.17)Denne egenskab er nok den vigtigske i forbindelse med beskrivelse af lineære tidsinvariantedynamiske systemer.Multiplikation:F [f1(t)f2(t)] =
1
2πF1(ω) ⋆ F2(ω) (A.18)Tidsforsinkelse:
F [f(t− t0)] = e−jωt0F (ω) (A.19)Modulation:
F [ejω0tf(t)] = F (ω − ω0) (A.20)Tidsdierentiering:
F»
dn
dtnf(t)
–
= (jω)nF (ω) (A.21)Tidsintegration:
F»Z t
−∞f(τ )dτ
–
=F (ω)
jω+ πF (0)δ(ω) (A.22)Frekvensdierentiering:
F [−jωtf(t)] =dF (ω)
dω(A.23)Frekvensintegration:
F»
f(t)
−jt
–
=
Z ω
−∞F (ν)dν (A.24)Reversering:
F [f(−t)] = F (−ω) (A.25)Antag, at f(t) ∈ R er en reel tidsfunktion, hvor energi indholdet:E =
Z ∞
−∞f
2(t)dt (A.26)
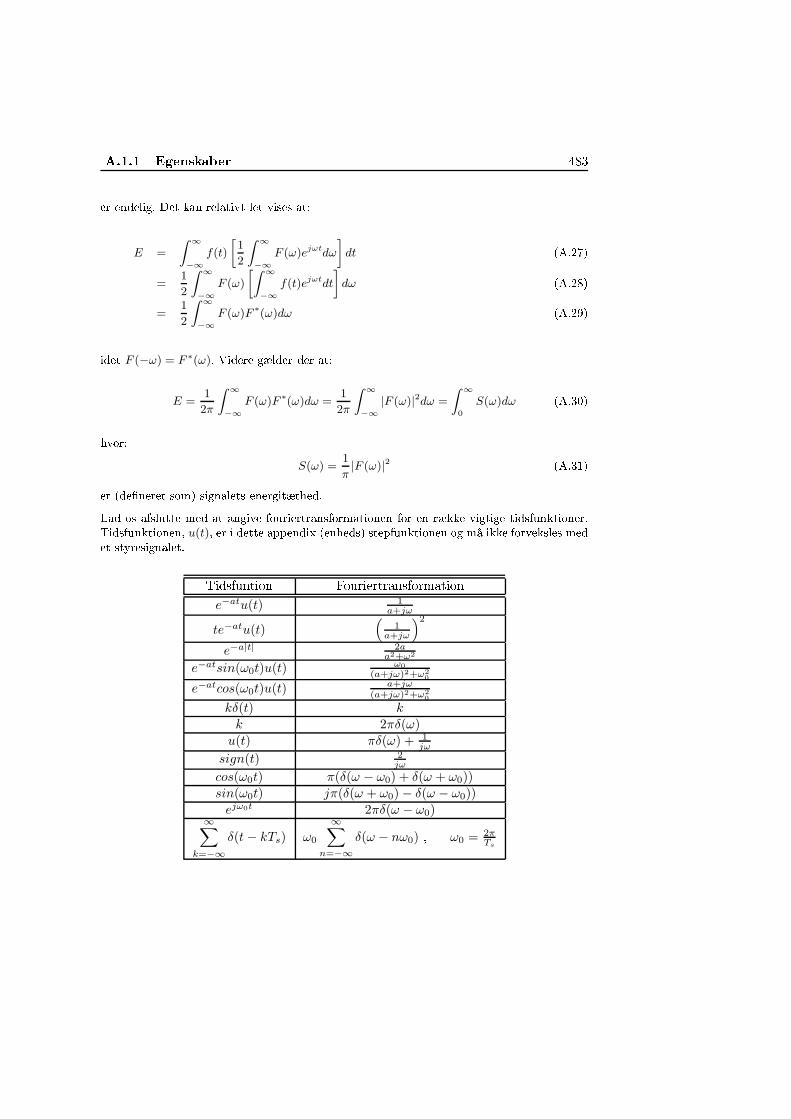
A.1.1 Egenskaber 483er endelig. Det kan relativt let vises at:E =
Z ∞
−∞f(t)
»
1
2
Z ∞
−∞F (ω)ejωt
dω
–
dt (A.27)=
1
2
Z ∞
−∞F (ω)
»Z ∞
−∞f(t)ejωt
dt
–
dω (A.28)=
1
2
Z ∞
−∞F (ω)F ∗(ω)dω (A.29)idet F (−ω) = F ∗(ω). Videre gælder der at:
E =1
2π
Z ∞
−∞F (ω)F ∗(ω)dω =
1
2π
Z ∞
−∞|F (ω)|2dω =
Z ∞
0
S(ω)dω (A.30)hvor:S(ω) =
1
π|F (ω)|2 (A.31)er (deneret som) signalets energitæthed.Lad os afslutte med at angive fouriertransformationen for en række vigtige tidsfunktioner.Tidsfunktionen, u(t), er i dette appendix (enheds) stepfunktionen og må ikke forveksles medet styresignalet. Tidsfuntion Fouriertransformation
e−atu(t) 1a+jω
te−atu(t)(
1a+jω
)2
e−a|t| 2aa2+ω2
e−atsin(ω0t)u(t) ω0
(a+jω)2+ω20
e−atcos(ω0t)u(t) a+jω
(a+jω)2+ω20
kδ(t) k
k 2πδ(ω)u(t) πδ(ω) + 1
jω
sign(t) 2jω
cos(ω0t) π(δ(ω − ω0) + δ(ω + ω0))sin(ω0t) jπ(δ(ω + ω0) − δ(ω − ω0))
ejω0t 2πδ(ω − ω0)∞∑
k=−∞
δ(t − kTs) ω0
∞∑
n=−∞
δ(ω − nω0) , ω0 = 2πTs

484 A.2 Lapla etransformationenA.1.2 Tidsdiskrete signalerEt tidsdiskret signal, fk, er i kontinuert tid givet ved:f(t) =
∞X
k=−∞fkδ(t− kTs) (A.32)hvor Ts er samplingperioden. Rent faktisk er der tale om en matematisk model for et tids-diskret signal. Dira funktionen, δ(t), er en generaliseret funktion:
δ(t) =
0 for t 6= 0∞ for t = 0
(A.33)og har den egenskab at:Z ∞
−∞δ(t)dt = 1 (A.34)og (under forudsætning af at g(t) er kontinuert i t = 0) at:
Z ∞
−∞g(t)δ(t)dt = g(0) (A.35)Vi har da umiddelbart af denitionen at:
F (ω) =
Z ∞
−∞
∞X
k=−∞fkδ(t− kTs)e
jωtdt (A.36)og dermed at:
F (ω) =∞X
k=−∞fke
−jkωTs (A.37)Det bemærkes, at F (ω) er periodisk for et tidsdiskret signal. Perioden er bestemt af ωTs =2π. Der opereres derfor oftest med en normeret vinkelfrekvens ωTs og F (ω) er kun interessanti intervallet [−π < ωTs ≤ π]. Sammenlign med sætning 1.1 [side 38. Omvendt kan fkbestemmes af:
fk =1
2π
Z πTs
− πTs
F (ω)ejkωTsdω (A.38)Som det vil fremgå af det senere, er den fouriertransformerede af en diskret tidsfunktionrelateret til den Z-transformerede, ved blot en formel erstatning mellem z og ejωt.A.2 Lapla etransformationenLapla etransformation eksisterer i to versioner, nemlig i en tosidig (bilateral) og en ensidig(unilateral). Lapla etransformationen kan opfattes som en udvidelse af Fouriertransforma-tionen, idet Lapla etransformationen kan fortolkes som en opløsning af en tidsfunktion idæmpede harmoniske funktioner, dvs. i est, hvor s = σ+ jω. Vi angiver først den bilateraleLapla etransformation:

A.2.1 Egenskaber 485Denition: A.2 (bilateral): Forudsat at integralet eksisterer er Den bilaterale Lapla e-transformerede af en tidsfunktion, f(t), er givet ved:Fb(s) = Lb[f(t)] =
Z ∞
−∞f(t)e−st
dt (A.39)forudsat at integralet eksisterer. 2Inversionsformlen er for den bilaterale Lapla etransformation givet ved:f(t) =
1
2πj
Z σ+j∞
σ−j∞Fb(s)e
stds (A.40)Sædvanligvis er de tidsfunktioner vi interesserer os for kausale, dvs. at f(t) = 0 for t < 0.Hvis vi begrænser mulige tidsfunktioner til denne klasse udarter ovennævnte denition tilfølgende.Denition: A.3 (unilateral): Den unilaterale Lapla etransformation af tidsfunktionen,
f(t), er deneret ved:F (s) = L[f(t)] =
Z ∞
0
f(t)e−stdt (A.41)forudsat integralet eksisterer. 2For en unilateral Lapla etranformation er invertionsformlen:
f(t) =1
2πj
Z σ+j∞
σ−j∞F (s)est
ds (A.42)A.2.1 EgenskaberEgenskaberne for den bilaterale Lapla etransformation er analog til egenskaberne for Fouriertransformation blot er den komplekse frekvens jω erstattet af s = σ + jω. Vi summerer herfølgende egenskaber, der er gældende for begge versioner af tranformationen:LinearitetL[af1(t) + bf2(t)] = aL[f1(t)] + bL[f2(t)] (A.43)Skalering
L[f(at)] =1
|a|F (s
a) (A.44)Tidsforsinkelse
L[f(t− τ )] = F (s)e−sτ (A.45)ModulationL[e−at
f(t)] = F (s+ a) (A.46)Foldning (tid)L[f1(t) ∗ f2(t)] = F1(ω)F2(ω) (A.47)

486 A.2 Lapla etransformationenFoldning (frekvens)L[f1(t)f2(t)] = F1(ω) ∗ F2(ω) (A.48)Dierentiering (frekvens)
L[(−t)nf(t)] =
dnF (s)
dsn(A.49)Egenskaberne overfor dierentiation er forskellige for de to transformationer. Vi angiverfølgende egenskaber:Dierentiering (tid)
Lb[df(t)
dt] = sFb(s) (A.50)
L[df(t)
dt] = sF (s) − f(0) (A.51)Integrering (tid)
Lb[
Z t
−∞f(τ )dτ ] =
Fb(s)
s(A.52)
L[
Z t
−∞f(τ )dτ ] =
F (s)
sskal he kes (A.53)Til bestemmelse af expAt kan der med fordel anvendes at:
L[expAt] = (sI − A)−1 (A.54)Lad os afslutte med at angive Lapla etransformationen for en række vigtige tidsfunktioner.Tidsfunktionen, u(t), er i dette appendix (enheds) stepfunktionen og må ikke forveksles medet styresignalet. Tidsfunktion Lapla etransformatione−atu(t) 1
s+a
te−atu(t)“
1s+a
”2
e−a|t| 2a
a2−s2
e−atsin(ω0t)u(t)ω0
(s+a)2+ω20
e−atcos(ω0t)u(t)s+a
(s+a)2+ω20
kδ(t) k
u(t) 1s
sign(t) 2s
P∞k=−∞ δ(t− kT ) 1
1−esTA.2.2 Tidsdiskret signalEt tidsdiskret signal, fk, er i kontinuert tid givet ved:f(f) =
∞X
k=−∞fkδ(t− kTs) (A.55)

487hvor Ts er samplingperioden. Vi har da umiddelbart af denitionen Lapla etransformationenaf et tidsdiskret signal er givet ved:F (s) =
Z ∞
0
∞X
k=−∞fkδ(t− kTs)e
stdt (A.56)og dermed at:
F (s) =∞X
k=−∞fke
−skTs (A.57)A.3 Z-TransformationenMan kan opfatte Z-transformationen, som et spe ialtilfælde af Lapla e transformationengældende for tidsdiskrete systemer. For et tidsdiskret signal gælder at den Lapla etranfor-merede er givet ved:F (s) =
∞X
k=−∞fke
−skTs (A.58)Erstatter vi i dette udtryk den komplekse variable est med z (z ∈ C) har vi følgendedenitioner.Denition: A.4 (bilaterale): Lad fk være et tidsdiskret signal. Da er den bilaterale Z-transformation givet ved:Fb(z) =
∞X
k=−∞fkz
−kFb(z) = Z[fk ] (A.59)under forudsætning af at summen eksisterer. 2Omvendt kan tidsfunktionen ndes af:
fk =1
2πj
I
Fb(z)zk−1 (A.60)I lighed med Lapla etransformationen er undersøgelserne ofte forbundet med kausale signa-ler, dvs. fk = 0 for t < 0.Denition: A.5 (unilaterale): Den Z-tranformerede af et tidsdiskret signal, fk, er de-neret ved:
F (z) =∞X
k=0
fkz−k (A.61)under forudsætning af eksistens af summen. 2For fuldstændighedens skyld angives inversionsformlen:
fk =1
2πj
I
F (z)zk−1 (A.62)
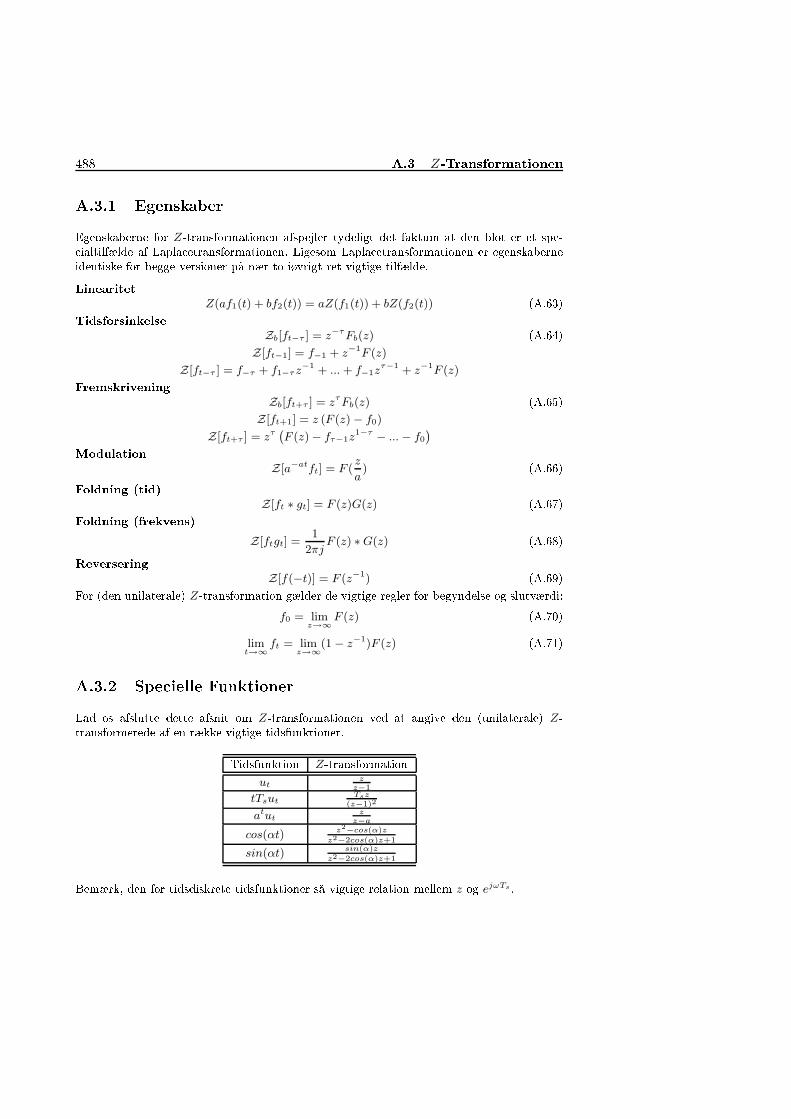
488 A.3 Z-TransformationenA.3.1 EgenskaberEgenskaberne for Z-transformationen afspejler tydeligt det faktum at den blot er et spe- ialtilfælde af Lapla etransformationen. Ligesom Lapla etransformationen er egenskaberneidentiske for begge versioner på nær to iøvrigt ret vigtige tilfælde.LinearitetZ(af1(t) + bf2(t)) = aZ(f1(t)) + bZ(f2(t)) (A.63)Tidsforsinkelse
Zb[ft−τ ] = z−τFb(z) (A.64)
Z[ft−1] = f−1 + z−1F (z)
Z[ft−τ ] = f−τ + f1−τz−1 + ...+ f−1z
τ−1 + z−1F (z)Fremskrivening
Zb[ft+τ ] = zτFb(z) (A.65)
Z[ft+1] = z (F (z) − f0)
Z[ft+τ ] = zτ`
F (z) − fτ−1z1−τ − ...− f0
´ModulationZ[a−at
ft] = F (z
a) (A.66)Foldning (tid)
Z[ft ∗ gt] = F (z)G(z) (A.67)Foldning (frekvens)Z[ftgt] =
1
2πjF (z) ∗G(z) (A.68)Reversering
Z[f(−t)] = F (z−1) (A.69)For (den unilaterale) Z-transformation gælder de vigtige regler for begyndelse og slutværdi:f0 = lim
z→∞F (z) (A.70)
limt→∞
ft = limz→∞
(1 − z−1)F (z) (A.71)A.3.2 Spe ielle FunktionerLad os afslutte dette afsnit om Z-transformationen ved at angive den (unilaterale) Z-transformerede af en række vigtige tidsfunktioner.Tidsfunktion Z-transformation
utz
z−1
tTsutTsz
(z−1)2
atutz
z−a
cos(αt) z2−cos(α)z
z2−2cos(α)z+1
sin(αt) sin(α)z
z2−2cos(α)z+1Bemærk, den for tidsdiskrete tidsfunktioner så vigtige relation mellem z og ejωTs .
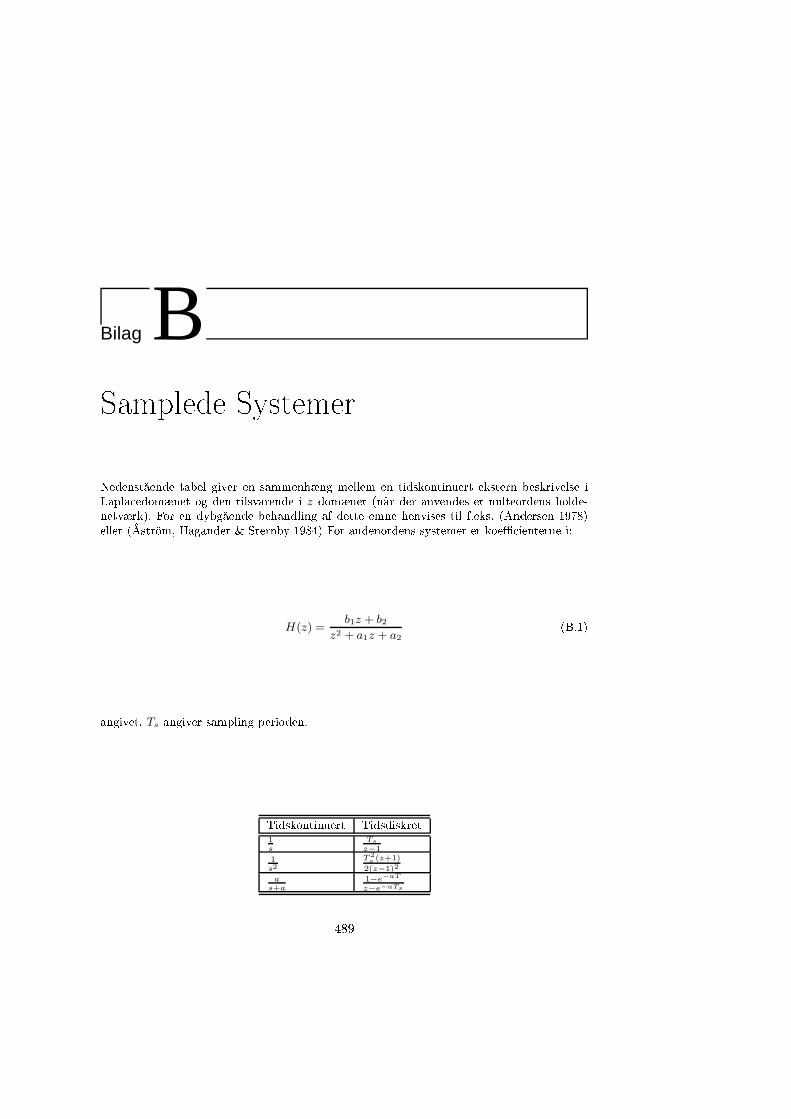
Bilag BSamplede SystemerNedenstående tabel giver en sammenhæng mellem en tidskontinuert ekstern beskrivelse iLapla edomænet og den tilsvarende i z domænet (når der anvendes et nulteordens holde-netværk). For en dybgående behandling af dette emne henvises til f.eks. (Andersen 1978)eller (Åström, Hagander & Sternby 1984) For andenordens systemer er koe ienterne i:H(z) =
b1z + b2
z2 + a1z + a2(B.1)
angivet. Ts angiver sampling perioden.Tidskontinuert Tidsdiskret1s
Ts
z−1
1s2
T2s (z+1)
2(z−1)2
as+a
1−e−aT
z−e−aTs489

490 A.3 Z-TransformationenTidskontinuert Tidsdiskreta
s(s+a)b1 = aTs−1+e−aTs
a
b2 = 1−e−aTs−ae−aTs
a
a1 = −(1 + e−aTs)a2 = e−aTs
a2
(s+a)2b1 = 1 − e−aTs(1 + aTs)
b2 = e−aTs(e−aTs + aTs − 1)a1 = −2e−aTs
a2 = e−2aTs
ab(s+a)(s+b)
b1 = b(1−e−aTs )−a(1−e−aTs )b−a
b2 = b(1−e−bTs )e−aTs−b(1−e−aTs )e−bTs
b−a
a1 = −(e−aTs + e−bTs)
a2 = e−(a+b)Ts
s+c(s+a)(s+b)
b1 =e−bTs−e−aTs+(1−e−bTs ) c
b−(1−e−aTs ) c
a
b−a
b2 = cabe−(a+b)Ts + b−c
b(a−b)e−aTs + c−a
a(a−b)e−bTs
a1 = −(e−aTs + e−bTs)
a2 = e−(a+b)Ts
ω20
s2+2ζωs+ω20
ω = ω0
p
1 − ζ2
α = e−ζω0Ts
β = cos(ωTs)γ = sin(ωTs)
b1 = 1 − α˘
β + ζω0ωγ¯
b2 = α2 + α˘
ζω0ωγ − β
¯
a1 = −2αβa2 = α2
s
s2+2ζω0s+ω20
ω = ω0
p
1 − ζ2
b1 = 1ωe−ζω0Tscos(ωTs)
b2 = −b1a1 = −2e−ζω0Tscos(ωTs)a2 = e−2ζω0Ts

Bilag CMatri erVi vil i dette appendix resumere nogle begreber og resultater angående matri er og vektorer,som enten er overordentlig nyttige eller som antages at være kendt baggrundsmateriale.Tilsvarende fremstillinger kan bl.a. ndes i (Franklin et al. 1990), (Lewis 1986a), (Kailath1980) og (Lewis 1986b). En egentlig gennemgang af dette emne kan f.eks. ndes i (Basilevsky1983), (Fabri ius-bjerre 1974) eller (Landesman & Hestenes 1992).Ved en matrix forstås et skema:A =
2
6
6
6
4
a11 a12 ... a1ns
a21 a22 ... a2ns... ... ...anr1 anr2 ... anrns
3
7
7
7
5
(C.1)med nr rækker og ns søjler af elementer (tal), hvor (i denne fremstilling) aij ∈ R (eller ivisse tilfælde aij ∈ C). En vektor er (i denne fremstilling) en matrix med kun en søjle.v =
2
6
6
6
4
a1
a2...an
3
7
7
7
5
(C.2)hvor n angiver antallet af elementer i vektoren eller dimensionen af vektoren. I visse frem-stillinger betegnes (C.2) som en søjlevektor. En rækkevektor er en matrix med en række.Bemærk, at en matrix består af ns vektorer (og nr rækkevektorer).491
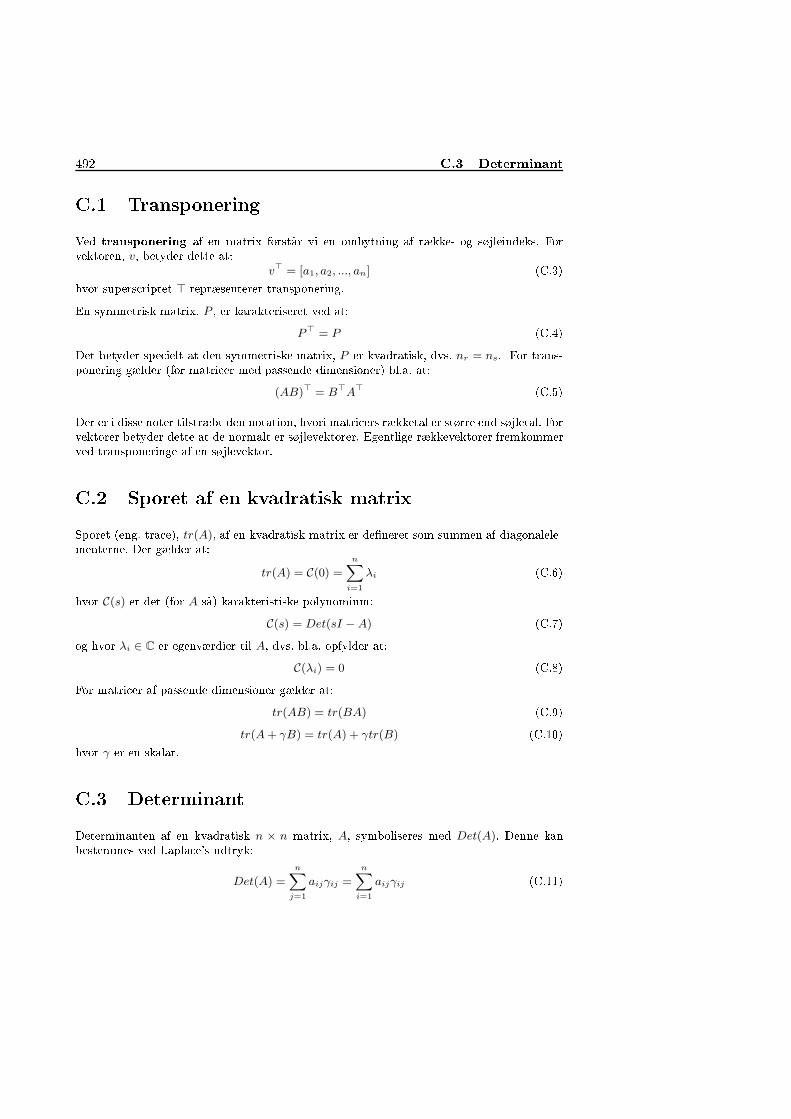
492 C.3 DeterminantC.1 TransponeringVed transponering af en matrix forstår vi en ombytning af række- og søjleindeks. Forvektoren, v, betyder dette at:v⊤ = [a1, a2, ..., an] (C.3)hvor supers riptet ⊤ repræsenterer transponering.En symmetrisk matrix, P , er karakteriseret ved at:
P⊤ = P (C.4)Det betyder spe ielt at den symmetriske matrix, P er kvadratisk, dvs. nr = ns. For trans-ponering gælder (for matri er med passende dimensioner) bl.a. at:
(AB)⊤ = B⊤A
⊤ (C.5)Der er i disse noter tilstræbt den notation, hvori matri ers rækketal er større end søjletal. Forvektorer betyder dette at de normalt er søjlevektorer. Egentlige rækkevektorer fremkommerved transponeringe af en søjlevektor.C.2 Sporet af en kvadratisk matrixSporet (eng. tra e), tr(A), af en kvadratisk matrix er deneret som summen af diagonalele-menterne. Der gælder at:tr(A) = C(0) =
nX
i=1
λi (C.6)hvor C(s) er det (for A så) karakteristiske polynomium:C(s) = Det(sI − A) (C.7)og hvor λi ∈ C er egenværdier til A, dvs. bl.a. opfylder at:
C(λi) = 0 (C.8)For matri er af passende dimensioner gælder at:tr(AB) = tr(BA) (C.9)
tr(A+ γB) = tr(A) + γtr(B) (C.10)hvor γ er en skalar.C.3 DeterminantDeterminanten af en kvadratisk n × n matrix, A, symboliseres med Det(A). Denne kanbestemmes ved Lapla e's udtryk:Det(A) =
nX
j=1
aijγij =
nX
i=1
aijγij (C.11)

493for enhver i = 1, 2, ..., n. Her betegner skalaren, γij , komplementet (eng. ofaktor) til ele-mentet aij og er givet ved:γij = (−1)i+j
Det(Aij) (C.12)hvor Aij er en (n− 1)× (n− 1) undermatrix, der fremkommer ved at slette række i og søjlej i A. For determinanten gælder at:
Det(A) = a1 =nY
i=1
λi (C.13)hvor a1 er koe ient i det karakteristiske polynomium:C(s) = Det(sI − A) = s
n + a1sn−1 + ... + an (C.14)og hvor egenværdierne λi er rødder for C(s). Hvis både A og B er kvadratiske da er:
Det(A⊤) = Det(A) (C.15)Det(AB) = Det(A)Det(B) (C.16)Hvis A er en m× n matrix og B er en n×m matrix (hvor n kan være lig m) gælder:
Det(Im + AB) = Det(In +BA) (C.17)hvor Ik er en k × k enhedsmatrix. Der gælder desuden at:Det
»
A 0C B
–
= Det(A)Det(B) (C.18)Hvis A er regulær gælder at:Det
»
A D
C B
–
= Det(A)Det(B − CA−1D) (C.19)C.4 InversionHvis A er kvadratisk og ikke er singulær (dvs. er regulær eller at Det(A) 6= 0), da har A eninvers A−1, der opfylder at:
AA−1 = A
−1A = I (C.20)Der gælder at:
Det(A−1) =1
Det(A)(C.21)Den til A hørende adjungerede matrix, adj(A), er deneret ved:
adj(A) = Matr[γij ]⊤ (C.22)hvor γij er givet ved (C.12) og hvor = Matr[γij ] angiver en matrix, hvis elementer netop er
γij . Den inverse til A kan bestemmes ved Cramer's regel:A
−1 =adj(A)
Det(A)(C.23)
494 C.5 Afhængighed og ortogonalitetFra (Fabri ius-bjerre 1974) har vi det velkendte udtryk for inversion af en 2 × 2 matrix:„
a b
c d
«−1
=1
ad− bc
„
d −b−c a
« (C.24)Hvis A og B er regulære gælder at:(AB)−1 = B
−1A
−1 (C.25)C.5 Afhængighed og ortogonalitetVed længden af en vektor, v, forstås normalt den euklidiske norm:‖ v ‖=
√v⊤v (C.26)To egentlige vektorer (dvs. vektorer som er forskellige fra nulvektoren), v ∈ R
n og x ∈ Rn,siges at være ortogonale ifremt:
v⊤x = 0 v ⊥ x (C.27)Betragt et sæt af vektorer, vi ∈ R
m, i = 1, ..., n. Disse siges at være linært afhængige, hvis(og kun hvis) ligningssystemet:nX
i=1
αivi = 0 (C.28)er tilfredstillet for et egentligt talsæt, (α1, α2, ..., αn). Vektorene betegnes som linært uafhæn-gige hvis (og kun hvis) ligningssystemet (C.28) kun er tilfredsstillet af talsættet (0, 0, ..., 0).Hvis vektorerne er lineært afhængige gælder der at mindst en af vektorerne kan skrives somen linearkombination af de øvrige. Det kan relativt let vises (se f.eks. (Fabri ius-bjerre 1974))at dersom vi parvist er ortogonale, da er vi lineært uafhængige.Ovenstående kan formuleres anderledes. Antag, at de n vektorer er arrangeret som søjler imatri en A.A =
ˆ
v1 v2 ... vn
˜ (C.29)Da er søjlerne i A lineært afhængige, hvis og kun hvis der eksisterer en egentlig vektor,x ∈ R
n således at:Ax = 0 (C.30)I modsat fald siges søjlerne i A at være lineært uafhængige.Betragt igen et sæt vektorer, vi ∈ R
m, i = 1, ..., n. Det lineære underrum, U , siges at væreudspændt af vi hvis:U = x ∈ R
m : x =nX
i=1
αivi, αi ∈ R (C.31)Vi skriver også at:U = spanv1, v2, ..., vn (C.32)

495Vi siger også at U er genereret af vi og kalder vi for U `s generatorer. Bemærk, atgeneratorsættet med lineære operationer kan transformeres til et andet generatorsæt. Hvis enaf vektorerne, f.eks. vk er lineært afhængig af de øvrige (kan skrives som en linearkombinationaf de øvrige) kan den udelades i udspændingen. Vi kan ved sletning af generatorer, der eren linearkombination af de øvrige, opnå en udspænding af r lineært uafhængige vektorer,ui ∈ R
m, i = 1, ...r. Sættet, ui, i = 1, ...r betegnes som U `s basis og r kaldes for dimensionenaf U .Lad U være et r-dimensionalt underrum til Rm (r ≤ m) med ui, i = 1, ...r som basis. Dakan der ndes m−r ≥ 0 uafhængige (indbyrdes og af ui, i = 1, ...r) vektorer, der udspænderet underrum, W, således at R
m = U ∪ W og at U ∩ W = 0 (mængde indeholdendenulvektoren).Det kan vises (se f.eks. (Landesman & Hestenes 1992)) at k uafhængige vektorer med enGram-S hmidt algoritme kan transformeres til et sæt af k indbyrdes ortogonale enhedsvek-torer (der som tidligere nævnt er lineært uafhængige). Såfremt de k vektorer udgør en basisfor U da betegnes de k indbyrdes ortogonale enhedsvektorer som en ortonormal basis.Lad gi, i = 1, ...r være en ortonormal basis for det lineære underrum, U ⊆ Rm (r ≤ m).Da eksisterer m − r ≥ 0 ortonormale vektorer (der er ortogonale med gi, i = 1, ...r) ogsom udgør en ortonormal basis for U⊥ således at R
m = U ∪ U⊥ og at U ∩ U⊥ = 0.C.6 Linære afbildningerLad os betragte den lineære afbildning:y = Ax x ∈ R
ny ∈ R
m (C.33)givet ved en m×n matrix A. Afbildningen foregår fra Rn til R
m, altså hvor x ∈ Rn og hvor
y ∈ Rm. Billedrummet (eng. range spa e), R(A) for A er det lineære underrum i R
m, derudspændes af (søjle)vektorene i A, dvs.R(A) = y ∈ R
m : y = Ax,x ∈ Rn (C.34)Dimensionen, r(A), af billedrummet er identisk med antallet af lineært uafhængige søjler i
A. r(A) betegnes som søjlerangen af A. Tilsvarende er nulrummet, N (A) (eng. kernel) forA deneret ved området:
N (A) = x ∈ Rn : Ax = 0 (C.35)Lad q(A) betegne dimensionen af N (A). Da gælder at:
r(A) + q(A) = n (C.36)Vi kan også betragte afbildningen fra Rm til R
n:x = A
⊤y x ∈ R
ny ∈ R
m (C.37)Vi har direkte fra ovenstående at:r(A⊤) + q(A⊤) = m (C.38)
496 C.7 Lineære ligningssystemerHer betegner r(AT ) således rækkerangen af A. Antallet af lineært uafhængige rækker i Abetegnes som A's rækkerang, dvs. r(A⊤). Determinantrangen, rdet(A), af A er identisk medordenen af den største regulære undermatrix. Det kan vises at:r(A) = r(AT ) = rdet(A) (C.39)Der skelnes derfor ikke mellem række-, søjle- eller determinantrang for en matrix. Hvis A eren m× n matrix og B er en n× p matrix, da gælder Sylvesters ulighed:
r(A) + r(B) − n ≤ r(AB) ≤ min(r(A), r(B)) (C.40)Det kan vises at:R(A) ⊥ N (A⊤) (C.41)og at:R(A⊤) ⊥ N (A) (C.42)altså at en vektor iR(A) er ortogonal med en i N (A⊤) og tilsvarende at en vektor iR(A⊤) erortogonal medN (A). At en vektor v ∈ R
m er beliggende iN (A⊤) betyder at den er ortogonalmed rækkerne i A⊤, der er identisk med søjlerne i A. Da nu disse søjler i A udspænder R(A)er vektoren v ortogonal på R(A). Se iøvrigt (Landesman & Hestenes 1992).Desuden gælder der at:N (A) ∪R(A⊤) = R
n N (A) ∩ R(A⊤) = 0 (C.43)og tilsvarende at:N (A⊤) ∪R(A) = R
m N (A⊤) ∩R(A) = 0 (C.44)Lad os betragte de symmetriske matri er, AA⊤ og A⊤A, der afbilder Rm henholdsvis R
nind i sig selv. Det kan vises at der gælder:N (A⊤
A) = N (A), R(A⊤A) = R(A⊤) = N (A)⊥ (C.45)
N (AA⊤) = N (A⊤), R(AA⊤) = R(A) = N (A⊤)⊥ (C.46)C.7 Lineære ligningssystemerLad os betragte et system af m lineære ligninger med n ubekendte, dvs.:Ax = b (C.47)hvor A er en m×n matrix med reelle elementer. Tilsvarende indeholder x n elementer, mens
b indeholder m.C.7.1 Tilfældet n = mI dette tilfælde er det velkendt at hvis (og kun hvis) A er regulær, da er løsningen entydigog givet ved:x = A
−1b (C.48)

C.7.2 Tilfældet n > m 497C.7.2 Tilfældet n > mHvis der er ere ligninger end der er ubekendte vil der kun eksistere en løsning forudsatb ∈ R(A). Dette er i al almindelighed ikke tilfældet.Vi kan imidlertid være interesseret i at nde værdier af x der relaterer sig til (C.47). En afdem er den så kaldte mindste kvadraters (eller LS) løsning, som er deneret ved:
x = argminx
h
(b− Ax)⊤(b− Ax)i (C.49)Denne er forudsat at A⊤A er regulær givet ved:
x = (A⊤A)−1
A⊤b n > m (C.50)Dette kan relativt let vises vha. resultater fra appendix D. Ved anvendelse af lemma D.1[side 505 kan vi omskrive:
J = (b− Ax)⊤(b−Ax)
= (b⊤x⊤)
„
I −A−A⊤ A⊤A
«„
b
x
«der ifølge lemma D.2 [side 506 har minimum som angivet i (C.50).C.7.3 Tilfældet n < mHvis der er færre ligninger end ubekendte eksister der ere løsninger til (appendix C.47). Vikan af forskellige grunde være interesseret i en løsning, der opfylder at:Ax = b x
⊤x er minimal (C.51)Denne løsning er givet ved:
x = A⊤(AA⊤)−1
b n < m (C.52)Vi viser først at x er en løsning. Der gælder simpelt at:Ax = AA
⊤(AA⊤)−1b = b (C.53)Vi vil vise at x er den mindste løsning (målt i en 2-norm). Lad x = x + ξ være en løsningtil (C.47) dvs. at:
Ax = Ax+ Aξ = b (C.54)Følgelig ligger ξ ∈ N (A), idet Aχ = 0. Videre gælder at:J = x
⊤x = x
⊤x+ x
⊤ξ + χ
⊤x+ ξ
⊤χ (C.55)Da nu:
x⊤ξ = b
⊤(AA⊤)−1Aξ = 0 (C.56)er J ≥ x⊤x.

498 C.9 EgenværdierC.8 BasisskifteAntag, at der i Rn foreligger en basis og at en vektors koordinater i forhold til denne basiser x. Betragt nu en ny basis gi, i = 1, ..., n hvor gi er udtrykt i forhold til den oprindeligebasis. Disse ny basisvektorer kan arrangeres i matri en A. Vektorens koordinater i forholdtil det ny koordinatsystem er y og der gælder at:
x = Ay (C.57)eller at:y = A
−1x (C.58)C.9 EgenværdierAntag at λi og vi henholdsvis er egenværdi og egenvektor for matri en A, dvs. at:
Avi = λivi (C.59)Egenværdien kan ndes som nulpunkterne til ligningsystemet:Det(A− λiI) = 0 (C.60)og egenvektorende som en løsning til:(A− λiI)vi = 0 (C.61)Normalt normeres egenvektorerne til enhedsvektorer. Denitionen, (C.59) kan også udtryk-kes ved:AV = VD (C.62)hvor D er en diagonalmatrix indeholdende egenværdierne og hvor V indeholder de tilsva-rende egenvektorene. Egentlige egenvektorer, der hører til forskellige egenværdier er lineærtuafhængige. Hvis A har n forskellige egenværdier da er alle n egenvektorer lineært uafhæn-gige (og V har fuld rang). Dette kan være opfyldt hvis A har multiple egenværdier (f.eks.hvis A er symmetrisk). Hvis V har fuld rang er det muligt at diagonalisere A ved similar-transformationen:
D = V−1AV A = V DV
−1 (C.63)Lad λi og vi være egenværdi og egenvektor for A, henholdsvis. Antag desuden at A−1eksisterer. Da er 1λi
egenværdi for A−1 med egenvektoren vi, idet:1
λi
vi = A−1vi (C.64)Lad S være en symmetrisk matrix. Da eksisterer n parvis ortogonale egenvektorer (uansetom disse er forskellige), således at:
V⊤V = I (C.65)Der gælder desuden at:
S = V DV⊤ =
nX
i=1
λiviv⊤i (C.66)

499Lad A være en p×m matrix (p > m) med rangen r ≤ m. Det kan vises at:A = UΣV ⊤ (C.67)hvor U er en p × p ortogonalmatrix, hvis søjler består af egenvektorerne til AA⊤. V er en
m×m ortogonalmatrix hvis søjler består af egenvektorerne til A⊤A. Σ er en diagonalmatrix,hvis diagonal indeholder kvadratroden af egenværdierne til A⊤A. Disse elementer betegnessom A's singulærværdier. Hvis σmax og σmin betegner den største og mindste singulærværdikan det for egenværdierne, λi, for en kvadratisk matrix, A, vises at:σmin ≤ min
i|λi| ≤ max
i|λi| ≤ σmax (C.68)Lad A være en m × n matrix og B en n × m matrix, hvor m < n. Det kan vises, at de
m egenværdier (λi med tilhørende egenvektor vi) til AB også er egenværdier til BA (medegenvektorer Bvi). De resterende n−m egenværdier til BA er nul.C.10 Cayley-Hamiltons sætningCayley-Hamiltons sætning er vigtig i forbindelse med styr- og observerbarhed. Konsekvensenaf Cayley-Hamiltons sætning er bl.a. at vi i forbindelse med test på styr- og observerbarhedkan nøjes med undersøge et begrænset antal rækker (eller søjler) i f. eks. styr- og observer-barhedsmatri en. Lad Φ være en n× n matrix med det karakteristiske polynomium:a(s) = s
n + a1sn−1 + ...+ an (C.69)Som før nævnt opfylder egenværdierne, λi, i = 1, ..., n til Φ opfylder at:
a(λi) = 0 (C.70)Sætning: C.1 Cayley-Hamiltons sætning angiver at alle kvadratiske matri er opfylder sinkarakteristiske ligning, dvs. at:a(Φ) = 0 (C.71)
2Lidt mere detaljeret gælder at:Φn + a1Φ
n−1 + ...+ anI = 0 (C.72)eller at:Φn = −a1Φ
n−1 − ...− an−1Φ − anI (C.73)=
n−1X
i=0
−an−iΦi (C.74)

500 C.11 Partitionerede Matri erDvs. Φn er en linearkombination af I , Φ, ...,Φn−1 . Videre gælder for Φn+1 at:Φn+1 = Φ
`
−a1Φn−1 − ...− a1Φ − a0I
´ (C.75)= −a1Φ
n − ...− a1Φ2 − a0Φ (C.76)
= −a1
n−1X
i=0
−an−iΦi
!
− ...− a1Φ2 − a0Φ (C.77)
=
n−1X
i=0
αn−iΦi (C.78)dvs. kan skrives som en linearkombination af I , Φ, ...,Φn−1 . På tilsvarende vis kan man vise,at der for m ≥ n gælder at:
Φm =n−1X
i=0
αi,mΦi (C.79)samt at der for en vilkårlig matrix (vektor), Γ af passende dimensioner gælder at:ΓΦm =
n−1X
i=0
αi,mΓΦi (C.80)C.11 Partitionerede Matri erHvisD =
0
@
A11 0 00 A22 00 0 A33
1
A (C.81)hvor Aij er matri er (evt. skalarer), da skriver vi:D = Diag(A11, A22, A33) (C.82)og kalder D for en blokdiagonal matrix (diagonalmatrix). Hvis Aii spe ielt er kvadratiskegælder at:
Det(D) = Det(A11)Det(A22)Det(A33) (C.83)og hvis Det(D) 6= 0D
−1 = Diag(A−111 , A
−122 , A
−133 ) (C.84)Hvis
Q =
0
@
A11 A12 A13
0 A22 A23
0 0 A33
1
A (C.85)hvor Aij er matri er, da kaldes Q for upper triangulær. På tilsvarende måde deneres ennedre triangulær matrix.
501C.12 Blokmatri erLad A betegne matri en:A =
„
A11 A12
A21 A22
« (C.86)da er S hur-komplementet, D22, til A22 deneret ved (forudsat A11 er inverterbar)D22 = A22 − A21A
−111 A12 (C.87)og S hur komplementet til A11 som (forudsat A22 er inverterbar):
D11 = A11 − A12A−122 A21 (C.88)Den inverse til A kan da (hvis den eksisterer) skrives som:
A−1 =
0
@
A−111 + A−1
11 A12D−122 A21A
−111 −A−1
11 A12D−122
−D−122 A21A
−111 D−1
22
1
A (C.89)som:A
−1 =
0
@
D−111 −D−1
11 A12A−122
−A−122 A21D
−111 A−1
22 +A−122 A21D
−111 A12A
−122
1
A (C.90)eller som:A
−1 =
0
@
D−111 −A−1
11 A12D−122
−A−122 A21D
−111 D−1
22
1
A (C.91)alt afhængig af om Det(A11) 6= 0, Det(A22) 6= 0 eller begge. Ved at sammenligne disseformer fremkommer en relation, der betegnes som inversions lemmaet:`
A−111 + A12A22A21
´−1= A11 −A11A12
`
A21A11A12 + A−122
´−1A21A11 (C.92)S hur-komplementet fremkommer naturligt i forbindelse med løsninger til lineære ligningeraf formen:
„
A11 A12
A21 A22
«„
X
Y
«
=
„
0Z
« (C.93)hvor første ligning giver at:X = −A−1
11 A12Y (C.94)der indsat i den anden giver:`
A22 − A21A−111 A12
´
Y = Z (C.95)eller at:D22Y = Z (C.96)Videre gælder at:
Det(A) = Det(A11)Det(D22) = Det(D11)Det(A22) (C.97)

502 C.13 Positive denitte matri erC.13 Positive denitte matri erI dette afsnit vil vi kort resumere nogle begreber og resultater gældende for positive denittematri er. Hvis x ∈ Rn er en vektor er kvadratet på den Euklidiske norm givet ved:
J =‖ x ‖2= x⊤x ≥ 0 (C.98)Hvis Υ er en regulær transformationsmatrix, da har vektoren Υx en kvadratisk norm givetved x⊤Υ⊤Υx ≥ 0. Lad Q = Υ⊤Υ og vi skriver:
‖ x ‖2Q= x
⊤Qx ≥ 0 (C.99)og kalder ‖ x ‖Q normen af x mht. Q.Lad S være en vilkårlig kvadratisk matrix. Vi er nu interesseret i at undersøge fortegnet afden kvadratiske form:
J = x⊤Sx (C.100)hvor J er en skalar. Enhver kvadratisk matrix kan dekomponeres i en symmetrisk, Ss og enasymmetrisk del, Sa, dvs.:
S = Ss + Sa Ss =1
2(S + S
⊤) Sa =1
2(S − S
⊤) (C.101)Bemærk, at der gælder at:S
⊤s = Ss S
⊤a = −Sa (C.102)Da nu skalaren x⊤Sax opfylder at:
x⊤Sax = (x⊤
Sax)⊤ = x
⊤S
⊤a x = −x⊤
Sax (C.103)gælder der at x⊤Sax = 0 for x ∈ Rn, eller at:J = x
⊤Sx = x
⊤Ssx (C.104)En analyse af fortegnsvariationen for J kan passende baseres på en analyse af Ss, der somsymmetrisk matrix kan diagonaliseres.En matrix S betegnes som positiv denit hvis (og kun hvis) x⊤Sx > 0 for alle x ∈ R
n. Afovenstående ses tydeligt at dette er tilfældet ifremt alle egenværdierne til Ss er positive. Enmatrix er positiv semidenit hhvis x⊤Sx ≥ 0 hvilket er tilfældet hvis alle egenværdier til Ssikke er negative. Analoge resultater er gældende for negativ denithed. En matrix betegnessom indenit, hvis J både kan antage positive og negative værdier. Dette er tilfældet hvisden symmetriske del af S har egenværdier af begge fortegn.

Bilag DKvadratiske formerI dette appendix er der samlet en række resultater, der er nyttige ved optimering på kvadra-tiske tabsfunktioner. Resultaterne anvendes både i forbindelse med estimationsproblemer(ML- og LS-estimatorer) og i forbindelse med reguleringsproblemet for lineære systemer ogkvadratiske tabsfunktioner (LQ- og LQG-regulering).Lad os indledningsvis resumere nogle resultater fra den lineære algebra illustreret i formaf en sekvens af eksempler vedrørende kvadratiske former. Vi betragter først kvadratiskeformer givet ved:J = x
⊤Hx+ g
⊤x+ b (D.1)hvor x er en vektor indeholdende n tilstandsvariable, H er en n× n matrix, g en vektor oghvor b er en skalar. Dette er motiveret af at vi vil møde minimeringproblemer af typen:
Jc =NX
t=to
x⊤t Q1xt + u
⊤t Q2ut (D.2)i forbindelse med styring af dynamiske systemer. Visse estimatorer er bestemt ved en mini-mering (mht. x) af et kriterium af typen:
Je = (Y − Φx)⊤Q(Y − Φx) (D.3)Det kan vises, at kriteriet (D.1) har et veldeneret minimum såfremt H er positiv de-nit (hvilket er opfyldt ifremt den symmetriske del at H kun har positive egenværdier). Iforbindelse med maximering er kravet at H skal være negativ denit.Eksempel: D.1 Lad os starte med et simpelt eksempel. Betragt et to dimensionalt problem hvor:H =
»
1 00 1
–
g =
»
00
–
b = 0 (D.4)I dette tilfælde kan vi ekspli it udskrive tabsfunktionen, J,J = x2
1 + x22 (D.5)503
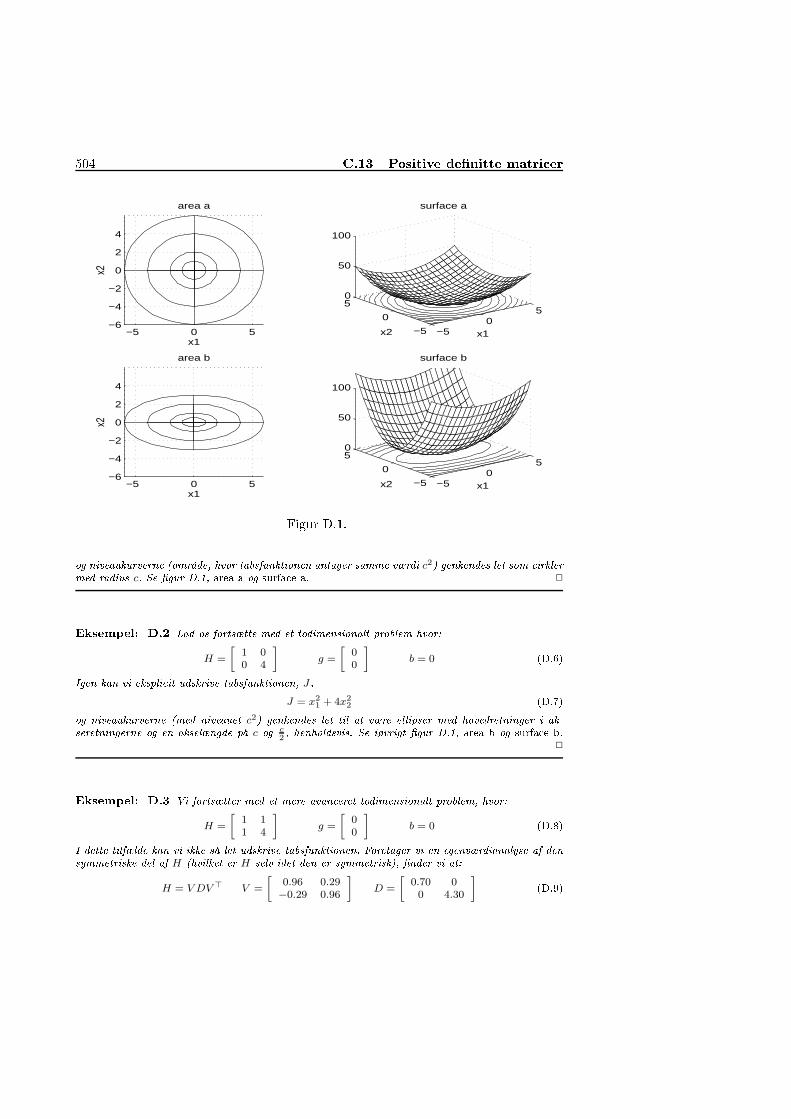
504 C.13 Positive denitte matri er−5 0 5
−6
−4
−2
0
2
4
area a
x1
x2
−50
5
−5
0
50
50
100
surface a
x1x2
−5 0 5−6
−4
−2
0
2
4
area b
x1
x2
−50
5
−5
0
50
50
100
surface b
x1x2Figur D.1.og niveaukurverne (område, hvor tabsfunktionen antager samme værdi c2) genkendes let som irklermed radius c. Se gur D.1, area a og surfa e a. 2Eksempel: D.2 Lad os fortsætte med et todimensionalt problem hvor:H =
»
1 00 4
–
g =
»
00
–
b = 0 (D.6)Igen kan vi ekspli it udskrive tabsfunktionen, J,J = x2
1 + 4x22 (D.7)og niveaukurverne (med niveauet c2) genkendes let til at være ellipser med hovedretninger i ak-seretningerne og en akselængde på c og c
2, henholdsvis. Se iøvrigt gur D.1, area b og surfa e b.
2Eksempel: D.3 Vi fortsætter med et mere avan eret todimensionalt problem, hvor:H =
»
1 11 4
–
g =
»
00
–
b = 0 (D.8)I dette tilfælde kan vi ikke så let udskrive tabsfunktionen. Foretager vi en egenværdianalyse af densymmetriske del af H (hvilket er H selv idet den er symmetrisk), nder vi at:H = V DV ⊤ V =
»
0.96 0.29−0.29 0.96
–
D =
»
0.70 00 4.30
– (D.9)
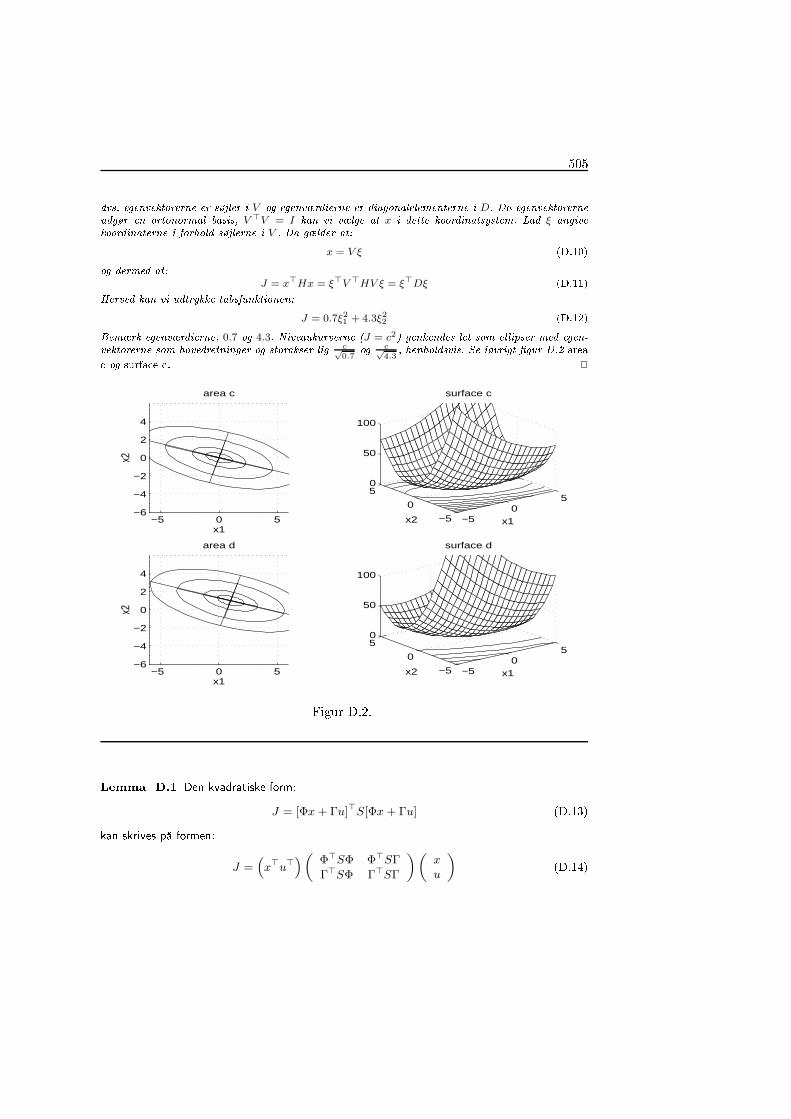
505dvs. egenvektorerne er søjler i V og egenværdierne er diagonalelementerne i D. Da egenvektorerneudgør en ortonormal basis, V ⊤V = I kan vi vælge at x i dette koordinatsystem. Lad ξ angivekoordinaterne i forhold søjlerne i V . Da gælder at:x = V ξ (D.10)og dermed at:
J = x⊤Hx = ξ⊤V ⊤HV ξ = ξ⊤Dξ (D.11)Herved kan vi udtrykke tabsfunktionen:J = 0.7ξ2
1 + 4.3ξ22 (D.12)Bemærk egenværdierne, 0.7 og 4.3. Niveaukurverne (J = c2) genkendes let som ellipser med egen-vektorerne som hovedretninger og storakser lig c√
0.7og c√
4.3, henholdsvis. Se iøvrigt gur D.2 area og surfa e . 2
−5 0 5−6
−4
−2
0
2
4
area c
x1
x2
−50
5
−5
0
50
50
100
surface c
x1x2
−5 0 5−6
−4
−2
0
2
4
area d
x1
x2
−50
5
−5
0
50
50
100
surface d
x1x2Figur D.2.Lemma D.1 Den kvadratiske form:J = [Φx+ Γu]⊤S[Φx+ Γu] (D.13)kan skrives på formen:
J =“
x⊤u⊤”
„
Φ⊤SΦ Φ⊤SΓ
Γ⊤SΦ Γ⊤SΓ
«„
x
u
« (D.14)
506 C.13 Positive denitte matri er28mmBevis: Beviset består simpelt i at udregne:
[Φx+ Γu] =`
Φ Γ´
»
x
u
– (D.15)hvormed:J =
“
x⊤u⊤”
„
Φ⊤
Γ⊤
«
S`
Φ Γ´
»
x
u
– (D.16)eller som angivet. 2Nu har vi betragtet egenskaber ved kvadratiske former samt en enkelt hjælpesætning (D.1).Lad os nu vende os mod problemet i at nde minimum for en kvadratisk form. (Maximumkan ndes på en helt ækvivalent måde).Lemma D.2 Antag, at u er en vektor bestående af beslutningsvariable og at x er en given(kendt) tilstandsvektor. Betragt den kvadratiske form:J =
“
x⊤u⊤”
„
h11 h12
h⊤12 h22
«„
x
u
« (D.17)Hvis h22 ikke er positiv semidenit eksister der ikke et minimum. Hvis h22 er positivdenit har den kvadratiske form minimum foru∗ = −h−1
22 h⊤12x (D.18)Minimum antager værdien:
J∗ = x
⊤Sx (D.19)hvor:
S = h11 − h12h−122 h
⊤12 (D.20)Hvis h22 ikke er positiv denit, men er positiv semidenit, eksisterer der der uendeligt mangeminimal (med samme minimale værdi).
28mmBevis: Idet vi udregner:J =
“
x⊤u⊤”
„
h11 h12
h⊤12 h22
«„
x
u
« (D.21)= x
⊤h11x+ 2x⊤
h12u+ u⊤h22u (D.22)
507kan vi let nde at:∇uJ = 2h22u+ 2h⊤
12x (D.23)∇2
uJ = 2h22 (D.24)Det vil sige at under forudsætning af at h22 er positiv denit har J minimum for:u∗ = −h−1
22 h⊤12x (D.25)der indsat i udtrykket for J giver at:
J∗ = x
⊤h11x+ 2x⊤
h12u∗ + (u∗)⊤h22u
∗ (D.26)= x
⊤h11x− 2(x⊤
h12h−122 )h⊤
12x (D.27)+(x⊤
h12h−122 )h22(h
−122 h
⊤12x) (D.28)
= x⊤h11x− x
⊤h12h
−122 h
⊤12x (D.29)
= x⊤(h11 − h12h
−122 h
⊤12)x (D.30)
2

508 C.13 Positive denitte matri er
Bilag EDiophantineligningenDiophantineligningen spiller en meget entral rolle indenfor stokastisk kontrolteori, idet denindgår i designligning for eksterne regulatorer og prædiktorer. I dette appendix vil vi betragtedette ligningssystem i detaljer.Antag, at vi for givne polynomier, A,B og C, hvor:C(q−1) = c0 + c1q
−1 + ...+ cncq−nc (E.1)
B(q−1) = b1q−1 + ...+ bnb
q−nb (E.2)
A(q−1) = 1 + a1q−1 + ...+ anq
−n (E.3)skal bestemme polynomierne R og S således at:C(q−1) = A(q−1)R(q−1) + B(q−1)S(q−1) (E.4)Ligningssystemet er bestemt af polynomierne A, B og C. Bemærk, at polynomierne A, Bog C er generelle og kun i et spe ialtilfælde er systempolynomier. Bemærk, at B-polynomietopfylder at:
B(0) = 0 (E.5)altså at den ledende koe ient (dvs. b0) er identisk nul. Vi indleder med følgende ret grund-liggende sætning.Sætning: E.1 Ligning (E.4) har kun en løsning hvis og kun hvis en fælles faktor mellem Aog B også er en divisor af C. 2Bevis: Se (Ku era 1979) 2Det skal bemærkes, at løsningen til diophantineligningen generelt ikke er entydig. Antag, at509

510 E.1 SylvestermetodenR0 og S0 er et løsningssæt til diophantineligningen (E.4). Da er:
R(q−1) = R0(q−1) + B(q−1)F (q−1) (E.6)
S(q−1) = S0(q−1) −A(q−1)F (q−1) (E.7)hvor F er et vilkårligt polynomium også et løsningssæt. I vores anvendelser, dvs. i forbindelsemed regulering kseres løsningen ved et krav på ordenerne af R- og S-polynomierne. For atfå den bedste støjundertrykkelse gælder der i vores anvendelser at:
ord(R) = nr = nb − 1 (E.8)hvor nb er ordenen af B-polynomiet. Ordenen af S-polynomiet vælges således, at der eksi-sterer en (og kun en) løsning til ligningsystemet, d.v.s. at ord(S) skal opfylde at:nb + ord(S) = Maxnc, n+ nr (E.9)eller at:
ns = ord(S) = Maxna − 1, nc − nb (E.10)Ligningssystemet kan løses på ere forskellige metoder.E.1 SylvestermetodenEn metode består i at identi ere koe ienterne (til q−i) på begge sider af lighedstegnet.Dette resulterer i et ligningsystem til bestemmelse af koe ienterne i R og S polynomiet.Denne metode kan videreudvikles. Det kan ved simpel udregning vises at det resulterendeligningssystem bliver:0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
@
1 0 ... 0 0 0 ... 0
a1 1. . . ... b1 0
...a2 a1 0 b2 b1 0... ... 1
... b2 b1
an an−1 a1 bnb
... b2
0 an
... 0 bnb−1
...... ... an−1
... bnbbnb−1
0 0 an 0... bnb
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
0
B
B
B
B
B
B
B
B
B
B
B
B
B
@
r0r1...rnr
s0s1...sns
1
C
C
C
C
C
C
C
C
C
C
C
C
C
A
=
0
B
B
B
B
B
B
B
B
B
B
B
@
c0c1...cnc
0...0
1
C
C
C
C
C
C
C
C
C
C
C
A
(E.11)Hvor:
R(q−1) = r0 + r1q−1 + ...+ rneq
−ne (E.12)S(q−1) = s0 + s1q
−1 + ...+ snsq−ns (E.13)Ligningsystemet kan skrives som:
Sx = z (E.14)

E.1.1 Impulsresponsmetoden 511hvor:x =
0
B
B
B
B
B
B
B
B
B
B
B
B
B
@
h0
h1...hnr
s0s1...sns
1
C
C
C
C
C
C
C
C
C
C
C
C
C
A
og z =
0
B
B
B
B
B
B
B
B
B
B
B
@
c0c1...cnc
0...0
1
C
C
C
C
C
C
C
C
C
C
C
A
(E.15)og hvor Sylvestermatri en, S, er:S =
0
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
@
1 0 ... 0 0 0 ... 0
a1 1. . . ... b1 0
...a2 a1 0 b2 b1 0... ... 1
... b2 b1
an an−1 a1 bnb
... b2
0 an
... 0 bnb−1
...... ... an−1
... bnbbnb−1
0 0 an 0... bnb
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
(E.16)Denne matrix har ere interessante systemteoretiske egenskaber. Det kan vises, at hvis (ogkun hvis) A og B har fælles faktorer da er S singulær (se f.eks. (Kailath 1980)). Detteanvendes bl.a. til at kontrol af om hvorvidt A og B har fælles faktorer. Det kunne somsagt vises, at hvis A og B har fælles faktorer, eksisterer der kun en løsning til diophantineligningen hvis faktoren også indgår i C-polynomiet. Det ses heraf direkte at denne metodeikke kan anvendes i forbindelse med problemer, hvor der indgår fællesfaktorer mellem A Bog C. Man er i et sådant tilfælde henvist til at foretage faktoriseringen manuelt eller anvendeen algoritme, der anvende en udvidet version af Euklids algoritme. Se f.eks. (Ku era 1979).E.1.1 ImpulsresponsmetodenI visse tilfælde (f.eks. ved minimalvariansprædiktion og ved fuld nulpunktsplombering) u-darter diophantine ligningen til en bestemmelse af polynomierne G og S hvor:
C(q−1) = A(q−1)G(q−1) + q−kS(q−1) (E.17)og hvor:
ng = k − 1 ns = max(na − 1, nc − k) (E.18)I dette tilfælde er løsningen til (den derved fremkomne) diophantineligningen blot resultatetaf polynomiersdivision, idet ligning (nefapp3:eq2) herved bliver:C(q−1)
A(q−1)= G(q−1) + q
−k S(q−1)
A(q−1)(E.19)

512 E.1 SylvestermetodenI dette spe ialtilfælde han vi fortolke koe ienterne i G-polynomiet som det trunkeredeimpulssvar, dvs.G(q−1) =
k−1X
i=0
giq−i C(q−1)
A(q−1)=
∞X
i=0
giq−i (E.20)Dette kan let indses ved:
C(q−1)
A(q−1)=
∞X
i=0
giq−i =
k−1X
i=0
giq−i +
∞X
i=k
giq−i (E.21)eller
C(q−1)
A(q−1)= G(q−1) + q
−k∞X
i=0
gi+kq−i (E.22)Her optræder S-polynomiet som resten ved divisionen.Algoritmen består da simpelt ved:1. Bestem de k første koe ienter i impulsresponsen, dvs.
G(q−1) =
»
C(q−1)
A(q−1)
–
k
(E.23)2. Bestem S ved:S(q−1) = q
k(C(q−1) − A(q−1)G(q−1)) (E.24)Det bemærkes, at denne metode kun kan anvendes når ligningen antager sin simple form,dvs. (E.17). Metoden kan i visse sammenhæng formuleres som en rekursiv metode (i k).

Bilag FSpektralfaktoriseringSpektralfaktorisering består basalt set i at bestemme et polynomiumP (z−1) = p0 + p1z
−1 + ...+ pnz−n (F.1)således at:
P (z−1)P (z) = Ψ(z) (F.2)hvor:Ψ(z) = rnz
n + rn−1zn−1 + ...+ r0 + ...+ rn−1z
1−n + rnz−n (F.3)under restriktionen at P(z) = znP (z−1) ikke har rødder udenfor enheds irklen. Spektral-faktorisering er en meget vigtig teknik, der optræder både i forbindelse med modellering oganalyse af stokastiske pro esser. Spektralfaktorisering optræder desuden i forbindelse meddesign af visse (LQG) regulatorer. I dette appendix vil vi angive et meget vigtigt lemma, derdanner grundlag for en analyseteknik, og samtidig angive en (blandt ere) numerisk metodetil bestemmelse af P (z−1).Bemærk indledningsvis at det er ækvivalent at operere med P (z−1) og:
P(z) = p0zn + p1z
n−1 + ...+ pn (F.4)idet:P(z)P(z−1) = z
nP (z−1)z−n
P (z) = P (z−1)P (z) (F.5)Lemma F.1 Betragt en funktionΨ(z) = rnz
n + rn−1zn−1 + ...+ r0 + ...+ rn−1z
1−n + rnz−n (F.6)513

514 E.1 Sylvestermetodenmed reelle koe ienter (ri ∈ R) hvor:Ψ(ejω) ∈ R og Ψ(ejω) ≥ 0 (F.7)Da eksister en positiv reel konstant, κ, og et polynomium:
B(z) = zn + b1z
n−1 + ...+ bn bi ∈ R (F.8)med alle nulpunkter beliggende ikke udenfor enheds irklen således at:Ψ(z) = κB(z)B(z−1) (F.9)Hvis Ψ(ejω) > 0 da er alle nulpunkter for B(z) beliggende indenfor enheds irklen.
28mmBevis: Vi vil først fokusere på pla eringen af nulpunkterne til Ψ(z). Lad ζi være et nulpunkttil Ψ(z). Idet:Ψ(z−1) = Ψ(z) (F.10)vil ζ−1
i også være et nulpunkt. Da (F.10) er gældende overalt optræder nulpunkterne i par,dvs. som (zi, z−1i ).Der vil være n (regnet med multipli itet) nulpunkter der ikke ligger udenfor og andre nnulpunkter, der ikke ligger indenfor enheds irklen. Lad os arrangere nulpunkterne såledesat for i = 1, ..., n
0 < |zi| ≤ 1 1 ≤ |zi+n| ≤ ∞ (F.11)og hvor zn+i = z−1i . Vi kan derfor skrive at:
Ψ(z) = z−nrn
nY
i=1
(z − zi)(z − z−1i ) (F.12)Lad os indføre
B(z) =nY
i=1
(z − zi) κ =(−1)nrnQn
i=1 zi
(F.13)Da vil:B(z−1) =
nY
i=1
(z−1 − zi) = (−1)nz−n
"
nY
i=1
zi
#
×nY
i=1
(z − z−1i ) (F.14)hvormed (F.9) er opfyldt. Lad os nu betragte forholdene på enheds irklen. Der gælder at
φ(ω) = Ψ(ejω) ≥ 0 og at:B(ejω)B(e−jω) = |B(ejω)|2 ≥ 0 (F.15)Dermed er konstanten κ reel og positiv. 2
E.1.1 Impulsresponsmetoden 515Lad os nu vende os mod en numerisk metode til bestemmelse afP (z−1) =
√κB(z−1) (F.16)Lad os introdu ere polynomiet:
X(z−1) = x0 + x1z−1 + · · · + xnz
−n (F.17)Metoden, der skyldes Wilson (se (Wilson 1972)), er iterativ og består i su essivt at udførefølgende trin indtil konvergens (dvs. indtil et givet stopkriterium er opfyldt).1 Bestem Xi således at:Pi(z
−1)Xi(z) + Pi(z)Xi(z−1) = 2Ψ(z) (F.18)2 Opdater næste iteration:
Pi+1(z−1) =
1
2
`
Pi(z−1) +Xi(z
−1)´ (F.19)Metoden kan f.eks. initialiseres i:
P0(z−1) = r0 + r1z
−1 + · · · + rnz−n (F.20)Det skal bemærkes at ligningssystemet (F.18) let kan omformuleres til følgende lineæreligningssystem:
2
6
6
6
4
pn 0 ... 0pn−1 pn ... 0... ... ...p0 p1 ... pn
3
7
7
7
5
2
6
6
6
4
x0
x1...xn
3
7
7
7
5
+
2
6
6
6
4
0 ... 0 p0
0 ... p0 p1... ... ...p0 ... pn−1 pn
3
7
7
7
5
2
6
6
6
4
x0
x1...xn
3
7
7
7
5
= 2
2
6
6
6
4
rn
rn−1...r0
3
7
7
7
5
(F.21)

516 E.1 Sylvestermetoden

Bilag GVektor og Matrix dierentiationLad x være vektor, dvs.:x =
2
6
6
6
4
x1
x2...xn
3
7
7
7
5
(G.1)og lad s være en skalar. Da er den aedede af x med hensyn til s deneret ved:dx
ds=
2
6
6
6
4
dx1ds
dx2ds...
dxn
ds
3
7
7
7
5
(G.2)Hvis s er en funktion af x da er gradienten af s med hensyn til x givet ved:∇xs =
ds
dx=
2
6
6
6
6
4
dsdx1ds
dx2...ds
dxn
3
7
7
7
7
5
(G.3)Hvis x afhænger af en skalar variabel, t, da er den aedede ad s mht. t givet ved:ds
dt=
„
∂s
∂x
«⊤dx
dt(G.4)Hessianen eller den dobbelte aedede af s mht. x er givet ved:
H =d2s
dx2=
»
d2s
dxrdxs
– (G.5)517
518 E.1 Sylvestermetodender er en symmetrisk n× n matrix. Det er muligt at Taylor udvikle s om x0:s(x) = s(x0) +
„
ds
dx
«⊤(x− x0) +
1
2((x− x0)
⊤»
d2s
dx2
–
(x− x0) + · · · (G.6)Lad f være en m-dimensional vektorfunktion, dvs.:f =
2
6
6
6
4
f1f2...fm
3
7
7
7
5
(G.7)Ja obianen af f mht. x er en m× n matrix:∇xf =
2
6
6
6
6
4
df1dx1
df1dx2
... df1dxn
df2dx1
df2dx2
... df2dxn... ... . . . ...
dfm
dx1
dfm
dx2... dfm
dxn
3
7
7
7
7
5
=
»
df
dx1
df
dx2...
df
dxn
–
=
2
6
6
6
6
4
`
df1dx
´⊤
`
df2dx
´⊤...`
dfm
dx
´⊤
3
7
7
7
7
5
(G.8)mens den aedede af f mht. t er m-dimensional vektor:df
dt=
„
∂f
∂x
«
dx
dt(G.9)Hvis y er en vektor, A, B, D, Q er matri er med passende dimensioner (sådan de angivneudtryk eksisterer) så gælder der at:
d
dt
`
A−1´
= −A−1
„
d
dtA
«
A−1 (G.10)og at:
∂
∂x(y⊤x) =
∂
∂x(x⊤
y) = y (G.11)∂
∂x(y⊤Ax) =
∂
∂x(x⊤
Ay) = Ay (G.12)∂
∂x(y⊤f(x)) =
∂
∂x(f⊤(x)y) = ∇xf
⊤y (G.13)
∂
∂x(x⊤
Ax) = Ax+ A⊤x (G.14)og hvis Q er symmetrisk at:
∂
∂x(x⊤
Qx) = 2Qx (G.15)En vigtig hessian er:∂2
∂x2(x⊤
Ax) = A+ A⊤ (G.16)og hvis Q er symmetrisk:
∂2
∂x2(x⊤
Qx) = 2Q (G.17)

E.1.1 Impulsresponsmetoden 519Af vigtige Ja obianen kan nævnes:∂
∂x(Ax) = A (G.18)Afslutningsvis kan vi angive nogle regler for aedede når spor og determinant er involveret.Der gælder:
∂
∂AtrA = I (G.19)
∂
∂AtrBAD = B
⊤D
⊤ (G.20)∂
∂AtrABA⊤ = 2AB (G.21)
∂
∂AdetBAD = detBADA−⊤ (G.22)∂
∂Alog(detA) = A
−⊤ (G.23)∂
∂A(tr(WA
−1)) = −(A−1WA
−1)⊤ (G.24)
520 E.1 Sylvestermetoden

Bilag HTrinrespons for et andenordenssystemBetragt et anden ordens system:y(tc) + 2ζω0y(tc) + ω
20y(tc) = ω
20u(tc) (H.1)Trinresponsen kan let (f.eks. ved anvendelse af Lapla eteknikken, se (Ogata 1970) side 229)for 0 ≤ ζ < 1 bestemmes til:
y(tc) = 1 − e−ζω0tc (H.2)
cos(p
1 − ζ2ω0tt) +ζ
p
1 − ζ2sin(
p
1 − ζ2ω0tc)
!Indføres den sædvanlige teknik fra den komplekse analyse fås når p+ er givetp± =
“
−ζ ± jp
1 − ζ2”
ω0 (H.3)at:y(tc) = 1 −Re
`
αep+t´
α = (1 − jζ
p
1 − ζ2) (H.4)
= 1 −Re“
r0ejφ0
”
r0 = |α| × |ep+t| =1
p
1 − ζ2e−ζω0t (H.5)
φ0 = arg(α) + arg(ep+t) = −arctan
ζp
1 − ζ2
!
+ ωdt (H.6)= 1 − e−ζω0tc
p
1 − ζ2cos(ωdt− ϑ) tan(ϑ) =
ζp
1 − ζ2(H.7)521

522 E.1 Sylvestermetoden
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0.00.1
0.2
0.3
1.0
2.0
3.0
Steprespons
t
y
Figur H.1. Trinrepons for et andenordens system med forskellige dæmpningerζ = sin(ϑ)
ℑ
φ
jω
q
1 − ζ2
ω
ϑ
ℜ−ζωFigur H.2. Pla ering af komplekse poler.hvor 0 ≥ ϑ < π2. Til bestemmelse af tr nder vi at:
d
dtcy(tc) = −Re(αp+e
p+t) = −Re(r1ejφ1) (H.8)r1 = |α||p+||ep+t| =
ω0p
1 − ζ2e−ζω0t (H.9)
φ1 = arg(α) + arg(p+) + arg(ep+t) (H.10)= −ϑ+
π
2+ ϑ+ ωdt (H.11)
=π
2+ ωdt (H.12)
=ω0
p
1 − ζ2e−ζω0t
sin(ωdt) (H.13)
E.1.1 Impulsresponsmetoden 523og at:d2
dt2cy(tc) = −Re(αp2
+ep+t) = −Re(r2ejφ2) (H.14)
r2 = |α||p+|2|ep+t| =ω2
0p
1 − ζ2e−ζω0t (H.15)
φ2 = arg(α) + 2arg(p+) + arg(ep+t) (H.16)= −ϑ+ 2(
π
2+ ϑ) + ωdt (H.17)
= π + ϑ+ ωdt (H.18)=
ω20
p
1 − ζ2e−ζω0t
cos(ωdt+ ϑ) (H.19)der har nulpunkt forωdtm =
π
2− ϑ = φ ω0tm =
π2− ϑ
p
1 − ζ2=
φp
1 − ζ2(H.20)Med:
tan(φ) =
p
1 − ζ2
ζζ = cos(φ) (H.21)har vi at:
tr =
p
1 − ζ2
ω0e
ζω0tm1
sin(ωdtm)(H.22)
=1
ω0
p
1 − ζ2
ζ
cos(φ)
sin(φ)exp
ζp
1 − ζ2φ
!
=1
ω0exp
„
φ
tan(φ)
« (H.23)

524 E.1 Sylvestermetoden
Bilag IMinimerings AlgoritmerI dette lille appendix vil vi beskrive nogle klassiske iterative metoder til minimering aftabsfunktioner. De beskrevne metoder har naturligvis en direkte anvendelse i den statiskeog dynamiske optimering (Optimal Styring). Metoderne anvendes desuden til estimation afparametre i dynamiske systemer. Fremstillingen (det vil hovedsageligt sige notationen) erher tilrettelagt med henblik på anvendelse i forbindelse med estimationsproblemet. Detteappendix afsluttes således med en kort gennemgang af rekursive metoder.Lad os tage udgangspunkt i et ubegrænset minimeringsproblem. Beslutnings variablene ersamlet i vektoren, θ, der skal bestemmes, således at den skalare funktion J(θ) antager sitminimum. Dvs. at:θ = argmin
θJ(θ) (I.1)Tabsfunktionen, J(θ), skal være opadhul og have en positiv denit hessianmatrix (dobbeltaedet af J mht. θ). Det antages i det følgende at dette minimum eksisterer og er entydigt.Det er velkendt at den optimale løsning skal ndes blandt de stationære punkter. Hvis I(θ)betegner den aedede af J(θ) mht. θ, da gælder der at:
I(θ) = 0 (I.2)i optimum θ. Under passende krav til tabsfunktionen (skal tilhøre C2) kan vi rækkeudvikleud fra et givet punkt, θ0, dvs. at:J(θ) ≃ J0 + g
⊤0 (θ − θ0) +
1
2(θ − θ0)
⊤H0(θ − θ0) (I.3)hvor generelt J0, g0 og H0 afhænger af udviklingspunktet θ0. For den første aedede gælderder at:
I(θ) ≃ g0 +H0(θ − θ0) (I.4)Hvis spe ielt J(θ) er kvadratisk i θ gælder lighedstegn i ovenstående udtryk. For det statio-nære punkt gælder der for det kvadratiske tilfælde at optimum ndes i:θ = θ0 −H
−10 g0 (I.5)525

526 I.1 Additive Tabsfunktioner.under forudsætning af at H0 er positiv denit.I det generelle tilfælde kan (I.5) bruges som en iterativ søgealgoritme. Lad θn være resultatetaf n iterationer og lad:gn = ∇θJ(θ)|θn
(I.6)Hn = ∇2
θJ(θ)|θn(I.7)Hvor Hn er positiv denit. Da kan søgningen efter et optimum ske efter rekursionen:
θn+1 = θn −H−1n gn (I.8)Denne betegnes ofte som en Newton rekursion. Som det fremgår af ovenstående vil optimumndes efter en iteration hvis tabsfunktionen, J(θ), er kvadratisk i θ. I en iterativ metoderindgår der udover iterationen (her I.8) også et stopkriterium samt et startpunkt. Lad
θ = θnstop P = H−1nstop
(I.9)betegne resultatet af den iterative søgning.I visse tilfælde er vil man i stedet for (I.8) anvende en noget simplere metode. I gradientmetoden anvendes rekursionen:θn+1 = θn − cngn (I.10)hvor cn er en med n aftagende sekvens af positive skalare tal. Der er sædvane at anvendesekvensen:
cn =1
n(I.11)Der er rimeligt evident at en gradientalgoritmes konvergensegenskaber sammenlignet meden newton metode ikke er så fordelagtige når tabsfunktionen er kvadratisk.I.1 Additive Tabsfunktioner.Lad os nu betragte det tilfælde at tabsfunktionen er givet på formen:
J(t, θ) =
tX
s=1
ρ(s, θ) (I.12)hvor ρ er en skalar (pseudo) konkav funktion af θ. Dette er typisk tilfældet i forbindelse medsystemidentikation. Denne tabsfunktion kan også skrives på formen:J(s+ 1, θ) = J(s, θ) + ρ(s+ 1, θ) J(0, θ) = 0 (I.13)Indfør nu størrelserne:
γ(s, θ) = ∇θρ(s, θ) (I.14)χ(s, θ) = ∇2
θρ(s, θ) (I.15)Optimum kan søges ved hjælp af newton iterationerne, dvs.θn+1 = θn −H
−1n gn (I.16)

527hvor:gn =
tX
s=1
γ(s, θ) Hn =
tX
s=1
χ(s, θ) (I.17)Anvendes en gradientalgoritme til søgningen bliver iterationen:θn+1 = θn − cngn (I.18)hvor gn er givet ved (I.17).I.2 Rekursive metoder.I det tidligere har vi betragtet metoder til minimering af spe ielt additive tabsfunktioner. Deovennævnte metoder har en klar anvendelse til pro es identikation (i modsætning til rekur-siv identikation), hvor estimatet direkte afhænger af den tilgængelige informationsmængde,dvs. at:θt = funkYt (I.19)For de rekursive metoder gælder, at estimatet afhænger af de forrige estimat og af den sidstforetagne måling, dvs. at:
θt+1 = funkθt, yt+1 (I.20)Antag nu, at tabsfunktionen er additiv og kan skrives på formen:J(s+ 1, θ) = λ(s+ 1)J(s, θ) + ρ(s+ 1, θ) (I.21)hvor der i forhold til (I.13) er indført en tidsvarierende glemselsfaktor, λ, for at inkluderemetoder til estimation af tidsvarierende systemparametre.Betragt følgende situation. Estimatet er bestem på grundlag af den tilgængelige informationtil tidspunktet t, dvs. at:
θt = argminθJ(t, θ) (I.22)Problemet er nu at bestemme estimatet baseret på information op til tiden t+1. En iteration(n → n+1) med en newton metode har da udseendet (hvor bl.a. tidsindex ikke er angivet):
θn+1 = θn −H−1n gn (I.23)Mere udførligt med angivelse af bl.a. tidsindex gælder der at:
θn = θ(n, t+ 1) Hn = H(t+ 1, θn) gn = g(t+ 1, θn) (I.24)Gradienten, g, og hessianen, H, ndes (for s = t) ud fra rekursionernegn(s+ 1) = λ(s+ 1)gn(s) + γn(s) gn(0) = 0 (I.25)Hn(s+ 1) = λ(s+ 1)Hn(s) + χn(s) Hn(0) = 0 (I.26)Generelt involverer denne metode for hver sampling (t → t+1) et antal iterationer af (I.23),der hver kræver en løsning af (I.25) og (I.26). En simplikation er følgelig ønskelig.
528 I.2 Rekursive metoder.Antag nu, at ρ (og dermed også J) er kvadratisk i θ. En newton algoritme nder som tidligerenævnt minimum i en iteration. Vi kan derfor bestemme estimatet efter:θt+1 = θ1 = θ0 −H
−10 g0 (I.27)Hvis vi som udgangspunkt for (I.27) vælger resultatet, θt, fra sidste sampling kan vi bestem-me resultatet til t+1 ved:
θt+1 = θt − Pt+1g0 (I.28)hvor:P
−1t+1 = H0 = H(t+ 1, θt) g0 = g(t+ 1, θ0) (I.29)Da nu θt er resultatet fra sidste sampling gælder der at:
g(t, θt) = 0 (I.30)hvorved (I.25) giver os at:g(t+ 1, θt) = γ(t+ 1, θt) (I.31)Da nu J er kvadratisk i θ er den dobbelt aedede af J m.h.t. θ uafhængig af θ, hvorved derfor kvadratiske former ifølge (I.26) gælder at:
P−1t+1 = λ(t+ 1)P−1
t + χ(t+ 1, θt) (I.32)Vi har redu eret problemet for kvadratiske former til en enkelt opdatering af rekursionerne:θt+1 = θt − Pt+1γ(t+ 1, θt) (I.33)
P−1t+1 = λ(t+ 1)P−1
t + χ(t+ 1, θt) (I.34)ved hver sampling (dvs for t → t+1). Disse rekursioner kan også anvendes, når tabsfunktio-nen ikke er kvadratisk i θ. I så tilfælde vil metoden naturligvis ikke have samme optimaleegenskaber som ved kvadratiske forhold.Rekursionen (I.33) er baseret på newton iterationer. Tages der udgangspunkt i en gradientrekursion fremkommer nedenstående rekursionssæt, der naturligvis udviser samme egenska-ber som den ikke rekursive gradient algoritme set i forhold til newton algoritmerne.θt+1 = θt − 1
Tt+1γ(t+ 1, θt) (I.35)
Tt+1 = λ(t+ 1)Tt + 1 (I.36)oooOooo

LitteraturAndersen, K. (1978), Samplede Regulerings Systemer, Servolaboratoriet.Anderson, B. D. & Moore, J. B. (1979), Optimal Filtering, Prenti e Hall.Aoki, M. (1977), Optimal Control and System Theory in Danami E onomi Analysis,North-Holland.Åström, K. (1983), `Theory and appli ation of adaptive ontrol - a survey', Automati a19(5), 471486.Åström, K. J. (1970), Introdu tion To Sto hasti Control Theory, A ademi Press.Åström, K. J., Hagander, H. & Sternby, J. (1984), `Zeroes of a sampled systems', Automati a20(1), 3138.Åström, K. J. & Hägglund, T. (1984), `A frequen y domain method for automati tunig ofsimple feedba k loops', CDC84.Åström, K. & Wittenmark, B. (1984), Computer Controlled Systems, Prenti e Hall.Basilevsky, A. (1983), Applied Matrix Algebra in th Statisti al S ien es, North-Holland.Bierman, G. J. (1977), Fa torization Methods For Dis rete Sequential Estimation, A ademi Press.Bitmead, R. R., Gevers, M. & Wertz, V. (1990), Adaptive Optimal Control - The TinkingMans's GPC., Prenti e Hall.Box, G. E. P. & Jenkins, G. M. (1976), Time series analysis, fore asting and ontrol, Holden-Day.Brimmett, G. & Stirzaker, D. (1982), Probability and Random Pro esses, Clarendon PressOxford.Caines, P. (1988), Linear Sto hasti Systems, Wiley.Clarke, D., Mohtadi, C. & Tus, P. (1987a), `Generalized predi tive ontrol - part II: Exten-tions and interpretations', Automati a 23(2), 149160.Clarke, D., Mohtadi, C. & Tus, P. S. (1987b), `Generalized predi tive ontrol - part I: Thebasi algorithm', Automati a 23(2), 137148.529

530 LITTERATURConradsen, K. (1979a), En Introduktion til Statistik I, Institute of Mathemati al Statisti sand Operations Resear h.Conradsen, K. (1979b), En Introduktion til Statistik II, IMSOR.Conradsen, K., Holst, J. & Thyregood, P. (1979), Statistiske Tabeller, IMSOR.Cox, D. & Miller, H. (1965), The Theory of Sto hasti Pro esses, Chapmann and Hall.Davis, M. H. A. & Vinter, R. B. (1985), Sto hasti Modelling and Control, Chapmann andHall.Eykho, P. (1974), System Identi ation. Parameter and state estimation, John Wiley andSons.Fabri ius-bjerre, F. (1974), Lærebog i Geometri, Vol. 1, Gjellerup.Franklin, G. F., Poell, J. & Workman, M. L. (1990), Digital Control of Dynami Systems,Addison-Wesley.Gabel, R. A. & Roberts, R. A. (1973), Signals and Linear Systems, John Wiley.Gelb (1974), Applied Optimal Estimation, MIT Press.Glover, K. (1984), `All optimal Hankel-norm approximation of linear multivariable systemsand their L∞-error bounds', International Journal of Control 39(6), 11151193.Goodwin, G. C. & R. L. Payne (1977), Dynami System Identi ation: Experiment Designand Data Analysis, Mathemati s in S in e and Engineering, A ademi Press, In .Goodwin, G. & K. S. Sin (1984), Adaptive Filtering Predi tion And Control, Prenti e Hall.Grewal, M. S. & Andrews, A. P. (1993), Kalman ltering, Theory and Pra ti e, Prenti eHall Information and System S ien e series, Prenti e Hall.Grimple, M. J. & Johnson, M. A. (1988), Optimal Control and Sto hasti Estimation, Theoryand Appli ations, John Wiley and Sons.Hinkley, D. (1971), `Inferen e about the hange-point from umulatie sum tests', Biometri a58(3), 509523.Isermann, R. (1982), `Parameter adaptive ontrol algorithms - a tutorial', Automati a18(5), 513528.Iversen, V. B. (1990), Stokastisk Simulation, IMSOR.Jazwinsky, A. H. (1970), Sto hasti Pro esses and Filtering Theory., A ademi Press.Jenkins, G. M. & Watts, D. G. (1968), Spe tral Analysis and its appli ations, Holden-Day.Jørsboe, O. G. (1976), Sandsynlighedsregning, Matematisk Institut.Kailath, T. (1980), Linear Systems, Prenti e Hall.Kemp, K. W. (1962), `The use of umulative sums for inspe tion s hemes', Applied Statisti s11, 1631.Ku era, V. (1979), Linear Control Systems, Wiley-Inters ien e.Kwakernaak, H. & Sivan, R. (1972), Linear Optimal Control Systems, Wiley-inters ien e.Landesman, E. M. & Hestenes, M. R. (1992), Linear Algebra for Mathemati s, S ien e andEngineering, Prenti e Hall.Levin, M. L. (1982), Datamatbaseret Reguleringssystemer, Servolaboratoriet, DTU.

LITTERATUR 531Lewis, F. (1986a), Optimal Control, Wiley.Lewis, F. (1986b), Optimal Estimation, Wiley.Ljung, L. (1987), System Identi ation: Theory for the User, Prenti e Hall.Ljung, L. (1991), System Identi ation Toolbox, Math Works In . For Use with MATLAB.Middleton, R. & G. Goodwin (1990), Digital Control And Estimation, A unied Approa h,Prenti e Hall.Ogata, K. (1970), Modern Control Engineering, Prenti e Hall.Poulsen, N. K. (1985), Robust Self Tuning Controllers, PhD thesis, IMSOR, The Te hni alUniversity of Denmark, B. 321, DK-2800 Lyngby.Rake, H. (1980), `Step response and frequen y response methods', Automati a 16, 519526.Söderström, T. (1994), Dis rete-Time Sto hasti Systems: Estimation and Control, Prenti eHall.Söderström, T. & P. Stoi a (1989), System Identi ation, Prenti e Hall.Soeterboek, R. (1992), Predi tive Control - a Unied Approa h, Prenti e Hall.Spliid, H. (1978), Noter til elementær statistisk kvalitetskontrol, Institute of Mathemati alStatisti s and Operations Resear h (IMSOR), The Te hni al University of Denmark.T.R. Fortes ue, L. K. & Ydstie, B. (1981), `Implementation of self-tuning regulators withvariable forgetting fa tors', Automati a 17(6), 831835.Wellstead, P. E. & Zarrop, M. B. (1991), Self-tuning Systems: Control and Signal Pro essing,Wiley.Wilson, G. (1972), `The fa torization of matri ial spe tral densities', SIAM journal on Ap-plied Mathemati s 23(4), 420426.
IndeksMV0-regulator, 336, 360MV0-reguleringekspli it, 464MV0−reguleringimpli it, 472MV1-regulator, 352MV3regulator, 352Z-transformation, 487egenskaber, 488funktioner, 488χ2-fordelingen, 126adj, 493Ni hols-Zieglers indstillingsregeler, 109A kermann, 104A kermanns formel, 98adaptiv regulator, 7adaptiv regulering, 447afbildninglineær, 495afhængighed, 128, 135mellem stokastiske variable, 128AIC, 426andenordenspro esser, 181asymptotisk stabilitet, 68attraktionsområde, 69autokovariansfunktion, 190balan eret realisation, 89Basal LQ-regulering, 100basal selvindstiller, 453ARMAX-system, 460ARX-system, 458ekspli it, 454
impli it, 457basi STC, 453basis, 495basisskifte, 498Bass-Gura, 104Bass-Gura's formel, 98Bayes estimation, 167begrænsning, 96beskrivelseintern, 21bias, 155BIBO-stabilitet, 71BIC, 426billedrum, 495binær stokastisk variabel, 121blandingssystem, 22BLUE, 156Cayley-Hamilton, 499 entral estimator, 155 entral moment, 124 ontrolabillity, 73Cramer, 493Cramer-Rao, 156DC-forstærkning, 49dekomposition, 86determinant, 492determinant af matrix, 492deterministisk regulering, 95polpla ering, 96diagonalform, 53digitalt styresignal, 39dimension, 495532
INDEKS 533diophantineligning, 509direkte realisation, 58dæmpede vinkelfrekvens, 30dæmpning, 62eektsignal, 480e ient, 156egenvektor for matrix, 498egenværdi af matrix, 498ekspli it basal selvindstiller, 454ekspli it reguleringMV0, 464GMV, 467LQG, 469polpla ering, 465ekspli it selvindstiller, 463eksponentiel glemsel, 438eksponentiel stabilitet, 69ekstern beskrivelse, 29ekstern pro esmodel, 216ekstern reguleringGPC, 353energisignal, 480ergodisk pro es, 185estimation, 153rekursiv, 429estimationsfejl, 155estimator, 155bedst lineære, entrale, 156bias, 155 entral, 155e ient, 156konsistent, 156mindste kvadraters metode, 157ML, 163, 164uniform minimal middelkvadrats, 155uniform minimalvarians, 156uniform minimalvarians entral, 156Euklids algoritme, 511extended kalmanltre, 275F-testen, 424Fishers informationsmatrix, 156, 163foldning, 33fordelingsfunktion, 119forgetting fa tor, 439forklaringsgrad, 424forstyrrelse, 95
fortegnstest, 418fortes ues metode, 441forventning, 122forventningsværdi, 122fouriertransformation, 34, 48, 479egenskaber, 481tidsdiskret, 484FPE, 426fraktil, 119frekvensfunktion, 120frekvensvægtning, 347fuldstændig tilstandsinformation, 293gain s hedulering, 449generaliseret minimalvarians regulering, 347Generel lineær model, 155generelle transformationer , 57gennemsnit, 122glemselsfaktor, 439glemselsmetoder, 437GMV reguleringekspli it, 467GMV-regulator, 347, 359GMV-reguleringimpli it, 475GPC-regulering, 353gradientalgoritme, 526gramianstyrbarhed, 75GSP-regulator, 344H(s), 35hankelmatrix, 78homogen variansstruktur, 165hukommelsesfaktor, 439identikationmetode, 366identikationspro es, 364Ikke-lineære transformationer , 57Ikke-parametriske metoder, 367impli it basal selvindstiller, 457impli it reguleringMV0, 472GMV, 475PZ-regulering, 473impli it selvindstiller, 471impulsrespons, 31, 47impulsresponsmetoden, 511

534 INDEKSimpulssvar, 31, 47informationskriterier, 426intern beskrivelse, 21, 25observer, 102prædiktion, 273tilstandsestimation, 102intern reguleringoptimal, 98polpla ering, 96interne pro esmodeller, 203inversion af matrix, 493irredu ibel, 61kalmanlterlineære systemer, 275Kalmans dekompositionssætning, 86karakteristisk funktion, 124kausalt, 31kompleks pol, 62konditionstalsanalyse, 411konsistent, 156konstant gain, 438konvergens, 199kovariansfunktion, 190kriterium, 96krydskovariansfunktion, 190kvadratisk form, 502, 503kvadratisk matrix, 492Lapla etransformation, 484bilateral, 485egenskaber, 485tidsdiskret, 486unilateral, 485ligningdiophant, 509lineær regressionsanalyse, 154LQ-regulering, 288LQG-regulator, 355, 359LQG-regulering, 288ekspli it, 469LS-estimation, 157egenskaber, 159Lyaponovligningen, 73Lyapunov, 70lyapunovfunktion, 70marginale test i parametre, 408
markovkæde, 189markovpro es, 186matri er, 491matrix, 491adjugerede, 493billedrum, 495blok, 501denition, 491determinant, 492determinantrang, 496egenvektor, 498egenværdi, 498Hankel, 78invers, 493inversion, 493kvadratisk, 492nulrum, 495partitioneret, 500positiv denit, 502positiv semidenit, 502rang, 495regulær, 493rækkerang, 496singulærværdier, 499spor, 492Sylvester, 511symmetrisk, 492søjlerang, 495tra e, 492transponering, 492median, 120middelværdi, 122minimal beskrivelse, 22minimal repræsentation, 57minimalvarians reguleringgeneral, 347minimalvariansregulator, 331minimalvariansregulering, 331minimeringrekursiv, 525minimering algoritmer, 525ML-estimation, 163egenskaber, 165Model Referen e Adaptive Controller, 450modelestimatorer, 442modelklasse, 365modellering
INDEKS 535deduktiv, 6induktiv, 6modelreferen e adaptivregulering, 450modelstruktur, 365modeltype, 365modelvalidering, 407modelverikation, 408moment, 122MRAC, 450Newton algoritme, 526newton algoritme, 526niveaukurver, 504normalfordelingvektoriel, 142normalfordelingenskalar, 124normalligningen, 159normalpro es, 181nulpunkt, 59, 63nulrum, 495nulteordens holdenetværk, 39Nyquistfrekvens, 38observations ligning, 25observer, 102observer for skalart system, 104observer for system på kanonisk form, 104observerbarhed, 80observerbarheds kanonisk form, 56observerbarhedsmatrix, 80observerbaseret regulering, 105observerkanonisk form, 55ODE, 25optimal regulering, 5, 288optimal tilstandstilbagekobling, 98opvoksningstid, 33ordensbestemmelse, 165oversving, 33PDE, 25peak time, 33PID-regulator, 5pol, 59, 61diskret tid, 61pollængden, 62poloverskud, 64polpla ering, 96, 116
polpla ering for skalart system, 98polpla erings reguleringekspli it, 465polpla eringsregulator, 358primisk, 61pro esnormal, 181stokastisk, 176pro es med uafhængig inkrementer, 182pro esligning, 22, 95pro esmodelekstern, 216pro esmodeller, 203interne, 203projektionssætningen, 146propert, 60PrædiktionEksterne modeller, 277prædiktion, 273intern beskrivelse, 273tilstandsbeskrivelse, 273PZ-regulator, 341PZ-regulering, 115impli it, 473påvirkning, 95rang, 495rea hablillity, 73reaktionsrate, 33reaktionstid, 33reel pol, 62referen emodel, 25referen esystem, 25regressionsanalyse, 154regulatoradaptiv, 7optimal, 5PID, 5regulatorkanonisk form, 54regulerbarhed, 73reguleringGPC, 353internpolpla ering, 96regulering af system på kanonisk form, 97reguleringsobjekt, 25rekursiv estimation, 429RELS-algoritme, 432

536 INDEKSresetting, 437residual, 157residualanalyse, 414residualvektor, 157restriktioner, 96Ri ati, 313Ri atiligning, 313algebraisk, 313risetime, 33RLM-algoritme, 432RLS-algoritme, 429RML-algoritmen, 433robust regulering, 449rodvinkelmargin, 30RPEM-algoritme, 433, 434RPLR-algoritme, 433, 434sammenfaldende nulpunkter og poler, 412sampling, 36frekvens, 38målbar påvirkning, 41tidskontinuert signal, 37tidskontinuert system, 39vinkelfrekvens, 38samplingfrekvensvalg af, 44Selvindstiller, 453selvindstiller, 447basal, 453impli it, 471sensitivitet, 90settling time, 33similartransformationer, 52singulærværdianalyse, 410singulærværdier, 499skalært system, 25spektralfaktorisering, 223, 513spektraltæthed, 193spor af matrix, 492spredning, 122STA-algoritme, 434stabilitet, 67, 68stabilitetsgrænsemetoden, 109standardafvigelse, 122state spa e beskrivelse, 21stationær pro es, 192stationært punkt, 68STC, 447, 451
basal, 453stigetid, 33stokastisk kontrolteori, 5stokastisk pro es, 176konvergens, 199andenordenspro es, 181basale egenskaber, 181beskrivelse, 178ergodisk, 185m.uah. inkrementer, 182markovpro es, 186stationaritet, 182stationær, 192stokastisk stationaritet, 182stokastisk variabeldenition, 119tæthedsfunktion, 120stokastiske pro esmodeller, 203stokastiske pro esserpro esmodeller, 203lineær gaussisk pro es, 206stokastiske skalære variable, 119stokastiske systemer, 173stokastiske vektorer, 131strengt propert, 60strukturbestemmelse, 165styrbarhed, 73styrbarhedsgramian, 75styrbarhedskanonisk form, 56støddæmpersystem, 23, 27, 29, 33, 34, 36, 41,4547, 50, 51Sylvestermatrix, 511systemskalært, 25tidsdiskret, 46tidskontinuert, 21systemdynamik, 95systemidentikation, 6, 363systemorden, 21systemrepræsentation, 21systemteori, 21systemtilstande, 21tanksystem, 22, 26, 27, 29, 31, 32, 34, 35, 41,44, 46, 49, 50, 52test i fordeling, 423test i kovariansfunktion, 419test i krydskovariansfunktion, 421

INDEKS 537test i middelværdi og varians, 417test mellem modeller, 424tidsdiskret system, 46tidsforsinkelse, 25, 60tidsinvariante pro esser, 209tilstandsbeskrivelse, 21tilstandstilbagekobling, 95optimal, 98tilstandstransformation, 52tilstandstransformationer, 57tra e af matrix, 492transformationZ, 487Fourier, 479Lapla e, 484transponering, 492trinrespons, 32trinresponsmetoden, 109trinsvar, 33tæthedsfunktion, 120udspænding, 494udvidet kalmanltre, 275ufuldstændig tilstandsinformation, 293UMMS, 155underrum, 494UniformMinimal Mean Square estimator, 155Valg af samplingsfrekvens, 44varians, 122vektor, 491afhængig, 494denition, 491dimension, 491ortogonal, 494udspænding, 494vektoriel normalfordeling, 142vægtfunktion, 33, 48ægte propert, 60





























