Embed Size (px)
Citation preview
Student initiation project to image processing, with CMUCAM module
and “BoeBot” robot from Parallax inc.
Ph. DONDON- P.GRESELLE ENSEIRB, Av Dr A. Schweitzer 33405 Talence, France.
G. LEROYER, Let Cie, 6 rue de la paroisse, 78000 Versailles, France
Abstract: This paper first point out the necessity of permanent teaching evolutions and adaptation due to
student’s behaviour changes. We describe some major changes. The impacts on the quality and efficiency of
traditional pedagogy are then indicated. From these observations, we show that pedagogical adaptations must
be done, in particular with the new fashion thematic such as signal and image processing. As an example, we
present here a didactical concrete project for a first initiation to image processing and applications fields.
Finally, we discuss the advantages of our approach and give results we obtained through this pedagogical
process.
Key words : Image processing, Robot, Embedded system, Analogue circuits, Sensors, Pedagogy by project.
1. Introduction
1.1 ENSEIRB learning overview
1.1.1 Sciences teaching evolutions
Since a few years, we observe in our electronic and
informatics engineer school, a kind of increasing
gap between the student’s needs and what we gave
to them. A global disaffection for all theoretical
lessons appeared and our traditional pedagogical
reached its limits.
These tendencies we noticed in our school are
confirmed by French national statistics: there is a
global demotivation for the scientific curriculum.
Economical, commercial studies seem to be now
more attractive for this new generation of students.
In front of this situation, we have to find permanent
adjustments and adaptations: All the scientific,
electronic, and other engineering fields of the
ENSEIRB program will have to be reformatted.
Each one of us had to suggest improvement,
modification in each own field of competence.
1.1.2 Impact on teaching efficiency This situation generates a general loss in term of
efficiency. In particular, we can point out, in our
electronic department two specific problems:
- Till now, our generic “sensors and
actuator” course, was a full classroom traditional
teaching with ten sessions of one hour and a half
each. It looked like a tiresome enumeration of the
physical principles and descriptions of the sensors
perfectly classified. Since two years the student’s
satisfaction rate was so poor that we decided a total
modification of our strategy.
- In the same direction, our analogue
electronic Value Unit (UV representing around 60
hours) seems to be “old fashion” for the students,
even if some fundaments must always be taught.
And we observe a lost of interest for these courses
and a higher absenteeism rate than before.
1.1.4 Adaptation to the new deals
After discussions and comparisons [2] [3], we
started a few years ago, a teaching experience with
a “learning by project approach” in order to make
our teaching more attractive.
2. Concrete pedagogical application
2.1 Learning by project
If this concept is obviously not new, its
introduction in our scientific school is quite recent
(five or six years). The aim of this practical
approach is to restore the motivation and to develop
the curiosity of the students. Such approach allows
a soft approach to difficult theoretical courses
which are nowadays rejected by the students.
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 27 ISBN: 978-960-474-128-1
2.2 The “Boe bot” project introduction As an example of theses possible teaching
evolutions, we describe here a student project we
started two years ago. It introduces as simply as
possible “image processing concept” in a concrete
and attractive robotic application.
After many years of collaboration with Parallax inc
company [4] and its French retailer, the funny
“Boe Bot robot” (figure 1) has been chosen for this
purpose.
Based on a “new fashion” embedded system
concept, it allows a concrete approach to electronic
and sensors theory. For educational reasons the
initial processing board BS2 can easily be replaced
by a microcontroller PIC 16F876 board for
example, in order to program in assembler or C
language instead of the BASIC language from
Parallax.
3. Short description of the robot The “boe bot” robot can be seen as an embedded
system: It is an electronic autonomous system
dedicated to a precise task. Such system generally
consists of a processor, a set of sensors with their
conditioning circuits and actuators [9].
3.1 General description The “Boe Bot” robot consists mainly of:
-Four 1,25V battery cells
-A set of sensors,
-Two motors and wheels
-A Basic stamp processing board
- Mechanical parts
- A gripper system (optional)
Figure 1 : Boebot view (parallax inc)
3.2 The set of sensors
This boe bot is a perfect support to study the
“sensor world” and their conditioning electronic
circuits. In our small robot, a set of quite simple or
sophisticated sensors is available. The most
popular are shortly listed below.
3.2.1 Camera sensor The most interesting sensor in our project is the
CMUcam [8], [10] with its CCD sensor OV6620,
and in-board image processing circuit for target
tracking or avoidance.
3.2.2 Other sensors Sophisticated MEMS inclinometer, optional
“whiskers” for mechanical obstacle detection,
working like simple on/off switches, are available.
Other infrared sensor looking downwards can be
added for border line detection on the floor. At
least, a couple of photo resistor for light avoidance
or tracking can be plugged with some external
components on the board.
3.3 Processing board Depending of the use of the robot, the students can
work with the included basic stamp BS2 board or
can design their own microcontroller board. In this
case, a micro chip PIC 16F876 is often used and a
C language management program can be written.
3.4 Actuators There are two classical servo motors for left and
right wheels driving. A small modification allows a
full 360° rotation.
As the two servo are not coupled, the rotation speed
must be calibrated (mechanically and/or by
software) to insure a right trajectory when the
command signals are identical.
At least , an optional servo motor (located on the
back side of the robot) can be used to open and
close a “gripper” (cf Figure 1).
4. Working with the CMUCAM
module A view of the full assembled robot is given in
figure 2. The CMU CAM module (figure 4)
designed by the Carnegie Mellon University [8]
consists of :
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 28 ISBN: 978-960-474-128-1
- An OV6620 single-chip cmos CIF color digital
camera,
- An image processing board with SX28 processor,
- An “In board” image processing software.
Figure 2: assembled robot
This CMU CAM module is able to self calibrate on
a background colour. Detection and localisation of
coloured objects into the field of view, is then
possible. As the CMU CAM is an embedded
system, it has to be lighter as possible: so, there is
no display panel or other extra functions.
4.1 Video format The OV6620 sensor has a maximum resolution of
352x288 pixels. This resolution corresponds to the
CIF format (Common Intermediate Format) which
is a popular format used in videoconferences for
example. This format is recommended by the video
standard H261.
In order to reduce the data flow, only the results of
detection with some estimator flags, are transmitted
to the BS2 Boe bot controller board. The
CMUCAM resolution is also limited to 80x143
pixels for faster image analysis.
4.2 Obstacle detection with CMUCAM
4.2.1 Object colour detection The principle of obstacle detection is based on the
colour difference between the background and the
object to be detected. The CMUCAM returns
information on the size and average colour of the
object.
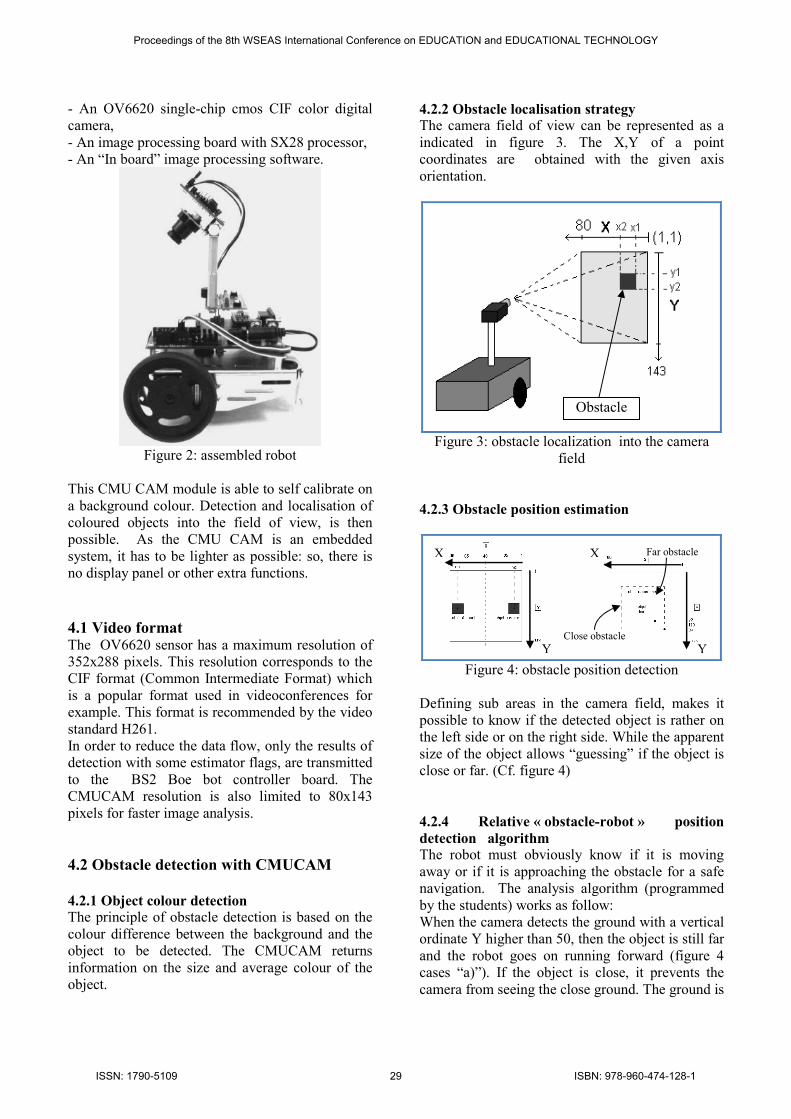
4.2.2 Obstacle localisation strategy The camera field of view can be represented as a
indicated in figure 3. The X,Y of a point
coordinates are obtained with the given axis
orientation.
Figure 3: obstacle localization into the camera
field
4.2.3 Obstacle position estimation
Figure 4: obstacle position detection
Defining sub areas in the camera field, makes it
possible to know if the detected object is rather on
the left side or on the right side. While the apparent
size of the object allows “guessing” if the object is
close or far. (Cf. figure 4)
4.2.4 Relative « obstacle-robot » position
detection algorithm The robot must obviously know if it is moving
away or if it is approaching the obstacle for a safe
navigation. The analysis algorithm (programmed
by the students) works as follow:
When the camera detects the ground with a vertical
ordinate Y higher than 50, then the object is still far
and the robot goes on running forward (figure 4
cases “a)”). If the object is close, it prevents the
camera from seeing the close ground. The ground is
Obstacle
X X
Y Y
Far obstacle
Close obstacle
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 29 ISBN: 978-960-474-128-1
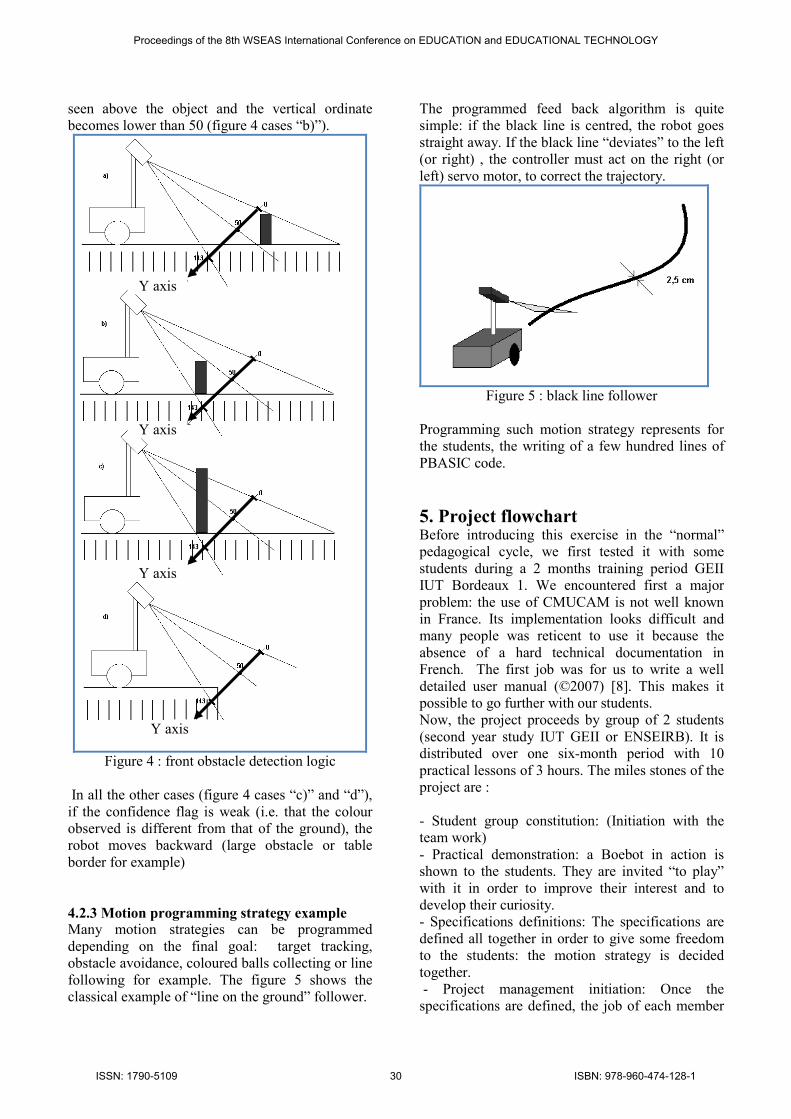
seen above the object and the vertical ordinate
becomes lower than 50 (figure 4 cases “b)”).
Figure 4 : front obstacle detection logic
In all the other cases (figure 4 cases “c)” and “d”),
if the confidence flag is weak (i.e. that the colour
observed is different from that of the ground), the
robot moves backward (large obstacle or table
border for example)
4.2.3 Motion programming strategy example Many motion strategies can be programmed
depending on the final goal: target tracking,
obstacle avoidance, coloured balls collecting or line
following for example. The figure 5 shows the
classical example of “line on the ground” follower.
The programmed feed back algorithm is quite
simple: if the black line is centred, the robot goes
straight away. If the black line “deviates” to the left
(or right) , the controller must act on the right (or
left) servo motor, to correct the trajectory.
Figure 5 : black line follower
Programming such motion strategy represents for
the students, the writing of a few hundred lines of
PBASIC code.
5. Project flowchart Before introducing this exercise in the “normal”
pedagogical cycle, we first tested it with some
students during a 2 months training period GEII
IUT Bordeaux 1. We encountered first a major
problem: the use of CMUCAM is not well known
in France. Its implementation looks difficult and
many people was reticent to use it because the
absence of a hard technical documentation in
French. The first job was for us to write a well
detailed user manual (©2007) [8]. This makes it
possible to go further with our students.
Now, the project proceeds by group of 2 students
(second year study IUT GEII or ENSEIRB). It is
distributed over one six-month period with 10
practical lessons of 3 hours. The miles stones of the
project are :
- Student group constitution: (Initiation with the
team work)
- Practical demonstration: a Boebot in action is
shown to the students. They are invited “to play”
with it in order to improve their interest and to
develop their curiosity.
- Specifications definitions: The specifications are
defined all together in order to give some freedom
to the students: the motion strategy is decided
together.
- Project management initiation: Once the
specifications are defined, the job of each member
Y axis
Y axis
Y axis
Y axis
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 30 ISBN: 978-960-474-128-1
of the team must be defined. By a short seminar on
project management, we help the students to make
their task repartition, project manager designation
and role attribution.
- Thematic bibliography: Showing the necessity of
collecting information before starting working, we
encourage the student to find documents, books,
and articles in our library. As examples of
bibliography we can mention the following topics:
- Using the CMUCAM module is the opportunity
to find UIT standards and other technical
documents about CIF video format and image
processing techniques [7].
- Using photo resistor sensors is the opportunity of
a technological manufacturing process description.
- Through the use of the MEMS accelerometer,
students have to make a “state of art” of all the
possible methods to measure tilt and acceleration.
- Sensors and conditioning circuit study: In a short
lessons, the Infrared and magnetic laws, the main
physical effects are explained. Each sensor used
during the project, is individually characterized and
the conditioning circuits are studied.
- Motion: a few lessons are dedicated to DC
motors, driver circuits, feed back theory, position
and speed control. Each servomotor used by the
students, is individually characterized (i.e
calibration, speed vs control signal, consumption).
(Cf. Figure 10, 11, 12, 13).
- Programming: the software is implemented by the
students into the processing board. (PBASIC,
assembler or C language)
- Practical test: once the whole system is correctly
manufactured, the behaviour of the sensors is
individually tested. Finally, a “under true
conditions test” is performed by verifying the
motion strategy on the playing area.
- Final report: In this complete report (design,
simulation, programming, manufacturing, test
procedure, results) we request the students to
reformulate what they understood during the
project. This enables us to be sure that the image
processing (and other) bases were assimilated.
- Oral report: each group must orally expose the
covered subject during the last meeting.
6. Validation tests and experiments
6.1 Electrical tests As indicated in the last paragraph, some
intermediate and final tests are performed during
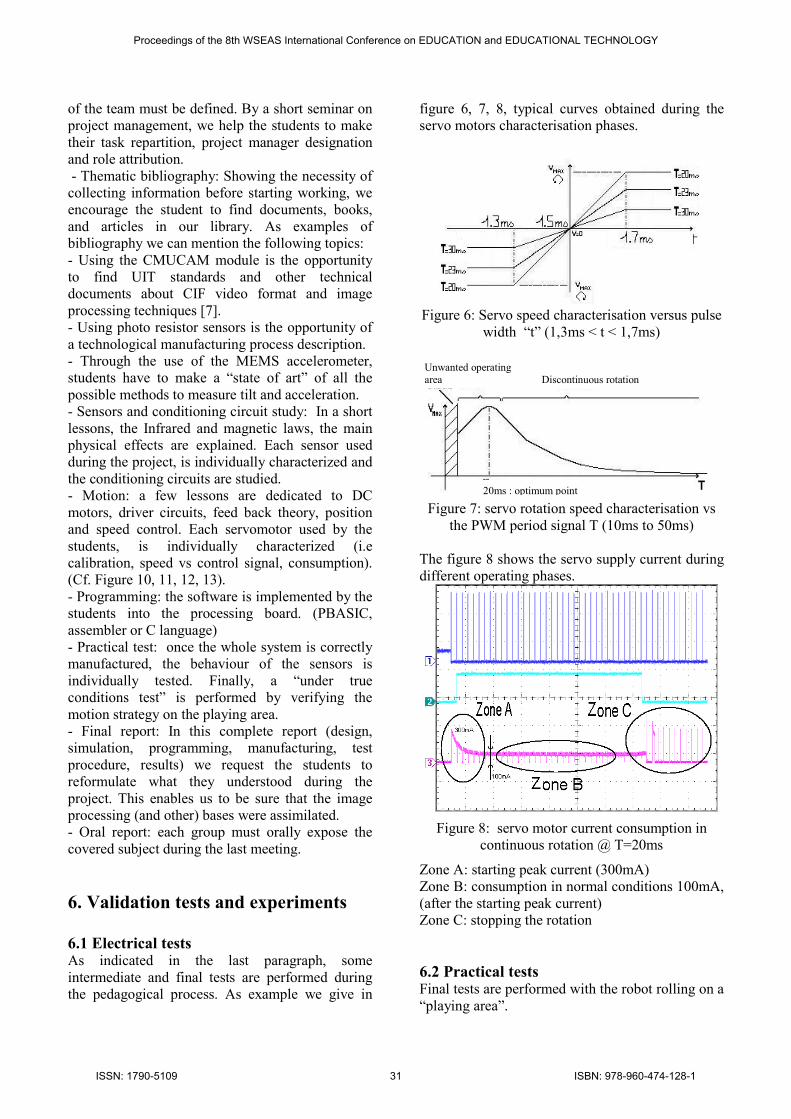
the pedagogical process. As example we give in
figure 6, 7, 8, typical curves obtained during the
servo motors characterisation phases.
Figure 6: Servo speed characterisation versus pulse
width “t” (1,3ms < t < 1,7ms)
Figure 7: servo rotation speed characterisation vs
the PWM period signal T (10ms to 50ms)
The figure 8 shows the servo supply current during
different operating phases.
Figure 8: servo motor current consumption in
continuous rotation @ T=20ms
Zone A: starting peak current (300mA)
Zone B: consumption in normal conditions 100mA,
(after the starting peak current)
Zone C: stopping the rotation
6.2 Practical tests Final tests are performed with the robot rolling on a
“playing area”.
Discontinuous rotation
20ms : optimum point
Unwanted operating
area
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 31 ISBN: 978-960-474-128-1

7. First pedagogical assessment - The funny aspects of the project (the robot is
moving and detecting) are a source of interest.
It is opportunity to teach some difficult fields of
electronic (in particular analogue electronic,
sensors and actuators) in a different pedagogical
way:
- The physical and mathematical complexity of the
electronic world is better received by the students
when there is a funny and motivating embedded
electronic project challenge.
- Some freedom into the design gives the
impression to the students to be more creative. It
acts like a creativity amplifier.
- Our « system » approach allows connecting
different fields of electronic (Analogue, digital,
sensors, micro programming, power motor
driving). It ensures a better comprehension, and
causes a global interest for the lessons.
- The project is also a time for a human experience,
a pleasant team work, and management
- This particular image processing project fits the
needs of our robotic student’s team and helps them
for the national and annual M6 TV robotic contest.
- At least, this project is used as demonstrator
during the French annual and traditional “day of
sciences”.
8. Results Even if it is always difficult to “measure” the
impact of a teaching strategy, this one seems to be
more attractive than before.
After two years of experimentation, we asked to
ours electronic department to make a opinion poll
or report, to get the comments of the students.
The last result shows that the satisfaction rate
raised from 45% up to 65%. Of course, we are far
from the perfection but what is important is that the
satisfaction rate increases.
In this report, the students point out the funny
aspect of the project, and also the system approach
which allows mixing the different field of
electronic. Even if the technical level of this
project is not very high, the most important for us is
to improve the global motivation, the interest for
the “oldest courses”, and also physical and mental
presence of ours students. In our example, the rate
of interested and “happier” students raised up to
80% and the absenteeism rate decreased
significantly.
Comparing to other experiences [2]; [3]; [5] done
in different French engineer schools, we see first
that many colleagues are now testing this kind of
approach. The same evolution in term of
motivation is observed, even if it will never
possible to obtained 100% of satisfaction rate.
9. Conclusion We showed in this paper the necessity of a
progressive adaptation of our teaching methods for
human and technical reasons. Replacing some
classical unpleasing lectures (analogue circuits,
sensors, image processing) by a “Learning by
project” approach using new fashion embedded
system thematic can be a good way (among others)
to improve the efficiency and the quality of our
teaching. Through a serious but funny robot
project, we showed that it was possible to improve
the behaviour, the motivation and the curiosity of
our students for the oldest and old fashion fields of
electronic. We are now trying to extend this
approach into other similar technical fields of our
electronic department.
References:
[1] DILTS Robert, GRINDER John. BANDLER
Richard, BANDLER L.C., DELOZIER Judith,
“neuro-linguistic programming, the study of
subjective experience” Meta Publications
Cupertino (California, USA) 1980
[2] M. AVILA, JC. BARDET, S. BEGOT, P.
VRIGNAT, N. STRIDE «La pédagogie par
projets » CETSIS Nancy 25-27 octobre 2005
France
[3] F. VINCENT, B.MOUTON, C.NOUALS,
« Radar de poursuite » CETSIS Toulouse 13-14
novembre 2003 France
[4] Parallax inc “Boebot manual”
http://www.parallax.com/index.asp
[5] CEPAGES project 2001, Test de l’Institut
Hermann France, 92500 Rueil Malmaison,
[6] Ph. DONDON “manuel d’utilisation
CMUCAM” Ph Dondon.-P.Greselle Enseirb ©
2007.
[7] Cheng-chuan chen, Ming-chih lu, Chin-tun
chuang, cheng-pei tsai “Vision-Based Distance and
Area Measurement System” WSEAS
TRANSACTIONS on SIGNAL PROCESSING
Issue 2, Volume 4, February 2008 ISSN: 1790-
5022
[8] Anthony ROWE “Boe-Bot CMUcam Manual
v1.1” Nov 2002 Carnegie Mellon University
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 32 ISBN: 978-960-474-128-1

[9] P. Dassonvalle “ Les capteurs”, éd Dunod 2005
Paris ISBN 2100069977[10] Cheng-chuan chen,
Ming-chih lu, Chin-tun chuang, Cheng-pei tsai
“Vision-Based Distance and Area
Measurement System” WSEAS
TRANSACTIONS on SIGNAL
PROCESSING Issue 2, Volume 4, February
2008 ISSN: 1790-5022
[11] Ernesto Araujo, Cassiano R. Silva, Daniel
J. B. S. Sampaio “Video Target Tracking by
using Competitive Neural Networks” WSEAS
TRANSACTIONS on SIGNAL
PROCESSING Issue 8, Volume 4, August 2008
[12] Eugen Zaharescu “Redefining
Morphological Operators for Color Image
Contrast Enhancement and Segmentation”
WSEAS TRANSACTIONS on SIGNAL
PROCESSING, Issue 7, Volume 2, July 2006
[13] Ph. DONDON- J.M MICOULEAU- G.
LEROYER "An alternating practical pedagogical
approach for sensors and actuators teaching:
Learning through a multi thematic mini rolling
robot design project " WSEAS EDUTE 2006 10-13
juillet 2006 Athens (Greece)
[14] N. Y. A. SHAMMAS, S. EIO, D. CHAMUND
“Semiconductor Devices and their use in Power
Electronic Applications” WSEAS POWER'07 21-
23 Nov 2007 Venise (Italia)
Proceedings of the 8th WSEAS International Conference on EDUCATION and EDUCATIONAL TECHNOLOGY
ISSN: 1790-5109 33 ISBN: 978-960-474-128-1





























