Embed Size (px)
Citation preview

Finite Elements in Analysis and Design 14 (1993) 163-176 163 Elsevier
FINEL 309
Studies on simultaneous optimization of structural and control systems with nonlinear properties
Hiroshi Yamakawa
Department of Mechanical Engineering, Waseda University, 3-4-10kubo Shinjuku, Tokyo 169, Japan
Abstract. In this paper, a simultaneous optimization method for structural and control systems with nonlinear properties is first introduced by reviewing our past studies. The method was developed by utilizing a step-by-step integration procedure, step-by-step sensitivities and nonlinear mathematical programming meth- ods. Then we show some numerical and experimental results, by applying the method to the design and position control problems of flexible robot arm systems. The validity and effectiveness are discussed.
Introduction
In conventional design methods for structural systems with controllers, the control systems are usually optimally designed to meet the dynamical requirements after optimum structural designs have been obtained. However, the frequency domains of the structural systems have recently become very close to those of the control systems or partly overlap, especially in the designs of flexible space structures or devices of electro-mechanical systems whose sizes and weights have been much reduced. In these cases, the dynamic behaviour of both structural and control systems interact with each other or are coupled, and intensive studies on simultaneous optimization of structural and control systems have been made in those fields, particularly in the field of space structures [1-10]. But in most of that work, only the optimization problems of linear structural and linear control systems were studied. Such systems often show various nonlinear characteristics, and those nonlinearities should be considered in practical designs.
In this article, a unified method to solve the simultaneous optimization problems of nonlinear structural and control systems is shown, and some numerical results of position control problems of flexible robot arms are shown by referencing our works [6,8]. The method was developed by utilizing a step-by-step integration procedure, and using the analogy between mechanical and electrical systems, to solve difficulties in practical computations [11]; also a step-by-step dynamic nonlinear analysis, with the aid of the analogy used in electro- mechanical systems and step-by-step sensitivities, was used for the gradient-based optimiza- tion method.
Simultaneous optimization method for structural and control systems [6]
Nonlinear analysis of structural and control systems
Nonlinear analysis of structural systems The nonlinear structural analysis used here is the general approximated method which is
based on the following piecewise linearized equations of motion:
0168-874X/93/$06.00 © 1993 - Elsevier Science Publishers B.V. All rights reserved

164 14. Yamakawa / Simultaneous optimization of structural and control systems
Mii + C~I + Kq = Q, (1)
where M, C, K are linearized mass, damping and stiffness matrices at the time t and q, q , / i are the displacement, velocity and acceleration vectors for the specific time. Nonlinear structural analysis can be carried out by using one method among the several step-by-step integration techniques. It is known that this method can be widely used for nonlinear structural analysis, excluding those special problems having singular points. To improve the accuracy, the nonlinear analysis generally needs many iterations.
Nonlinear analysis of control systems The nonlinear analysis of control systems used here is based on the same equations of
motion (1). The force vector in the right-hand side of eqn. (1) is divided into two components, and eqn. (1) is rewritten in the form
Mii + Cq + Kq = F~L + Fcf~, (2)
where fe and f~ are the external and control force vectors respectively and F e and F~ are the coefficient matrices corresponding to them. The simultaneous optimization method to be introduced later can be based on eqn. (2), the second-order ordinary differential equation, but here we proceed by using a state vector equation which is often employed in the analysis of control systems:
where
y = a y + nL + oL , (3)
Y= 4 ' l ' ' 0 '
and I and 0 are unit and zero matrices. Next we introduce the feedback control rule to the control force f t . Then fc can be
written as
L = (4)
where G is a gain matrix, and eqn. (3) leads to
~= (A - B G ) y + Ofe. (5)
Equation (5) can be analysed by well developed linear control theory for each time step, and the theory will be explained briefly in a later section.
Individual optimization method of structural and control systems
Optimization method of structural systems (optimum structural design) We suppose here that the conceptual and fundamental designs have already been fixed in
the primary design process, and our interest is in finding optimum parameters in a detailed design.
We now express the parameters to be found optimally by a vector:
s T X s = { x ~ , x ~ . . . . . x,} , (6)
where superscript s in eqn. (6) represents the parameters of the structural systems. The following formulation of optimum structural design can be considered.

H. Yamakawa / Simultaneous optimization of structural and control systems 165
Optimum Structural Design Find design parameters (design variables)
gy(XS) ~< 0 ( j = l , 2 . . . . . k) (a)
to minimize (or maximize) the objective function
~s(X s) (b)
subject to the constraints
x s = . . . . . + ( c )
The specific optimum design problems of nonlinear structural systems where the objective function or constraints are related to the dynamic responses of structural systems, called the optimum designs for dynamic response, are more difficult and tedious than the problems of static responses. The author has proposed an efficient optimization method for dynamic response [11]. The method utilized a step-by-step integration scheme in both dynamic analysis and sensitivity analysis, and a gradient-based optimization method. The basic idea of the method is developed in the equations obtained by differentiating eqn. (1) with respect to design variables xy (j = 1, 2 . . . . . n), which gives
"" " aq aQ _ (aM. . aC aK ) M ~ + C~x/ + Kax/ = Oxy ax/q + -~xyil + ~xy q " (7)
The step-by-step sensitivities can be calculated by solving eqn. (7) again with the aid of the same step-by-step integration scheme. The practical procedure was shown for some typical integration schemes in Ref. [11].
Optimization method for control systems (optimal control) A performance index which is generally used in the optimal control theory is a function of
the state variables and the control forces, as in the following equation:
Jc =Jc(Y, fc, t) . (8)
A typical performance index often takes the following form in the optimal regulator problem:
Jc = fotF( yTWlY + fTW2fc ) dt, (9)
where the first term denotes the energy of vibration and the second the energy of the control. In this equation the upper limit of the integral, t F, is the final time of the control and WI, W2 are the weighting coefficients corresponding to the two energies. When the feedback control rule in eqn. (4) is adopted, then eqn. (9) leads to
Jc = f0tFyT(W1 -4- GT~l, r2G)Y dt. (10)
To simplify the expression, the elements of the feedback gain matrix are denoted by gij (i, j = 1, 2 . . . . , n) and they can be rearranged in a single vector (say, a feedback gain vector) XC:
X c= {x~, x~ . . . . ,x~}. (11)
Then the optimal regulator problem can be formulated as follows:
Optimal Regulator Problem Find a feedback gain vector
x ° = { . . . . . X m} ( a )

166 H. Yamakawa / Simultaneous optimization of structural and control systems
to minimize the performance index
J, = jtFyT(W, + GTW,G)y df 0
(b)
subject to the state vector equation
j=(A-BG)y+Df,. (c)
The above problem is usually solved by introducing the Ricatti (differential) equation, and it can be said that the method has been established for such a typical problem as formulated above. However, more studies will be necessary for nonlinear problems and with other constraints, because the state equation (3) can only express the dynamic state for the specific time at which the nonlinear systems were linearized, and there is little constraint in the usual formulation of optimal control problems as shown above. It may be noted that the same type of formulation applies in both optimum design and optimum regulator problems. Conse- quently, the same step-by-step sensitivity analysis as in the structural optimization gives a more general optimization method for various types of optimal regulator problems with nonlinearities and other constraints. For example, the differentiation of eqn. (10) with respect to the feedback gain xi” (i = 1, 2,. . . , m> yields the following sensitivity of the performance index:
w, + GTW,G)y + Y’( W, + GTW,G) T$ J
+YT i
$w~G+GW~$ Y dt. J J 1) (12)
Equation (12) can be evaluated from the sensitivity of the state variables, which can be calculated from the usual equation by the differentiation of eqn. (5) with respect to x::
-f&=(a-sG)&-B$Y.
J J J (13)
Simultaneous optimization method of structural and control systems
A simultaneous optimization problem is defined as one of determining the optimum values of both structural and control parameters (design variables) so as to minimize a combined or a unified single objective function or many objective functions, that is, a scalar objective function or a vector objective function which consists of the objective functions of structural systems and the performance indices of control systems.
Now let us consider all the parameters in the structural and control systems and denote them by a single vector:
X={XS,XC}T={X; )...) .X:,x; )...) XL}‘. (14)
Though the proposed method can be applied to both types of problems with a scalar objective function and a vector objective function, and further examinations will be necessary from many standpoints, in the following explanation we restrict the problem to a scalar objective function, due to the space limitations of this article. A scalar objective function is obtained by

1t. Yamakawa / Simultaneous optimization of structural and control systems 167
I Ini t i ,al se t [
- -~Dynarn i c a n a l y s i s b y s t e p - b y - s t e p i n t e g r a t i o n m e t h o d I I
D y n a m i c s e n s i t i b i t y a n a l y s i s b y s t e p - b y - s t e p I i n t e g e r a t i o n m e t h o d I
I C a l c u l a t i o n s o f s e n s i t i v i t i e s o f o b j e c t i v e f u n c t i o n s o f s t r u c t u r a l a n d c o n t r o l s y s t e m s a n d s e n s i t i v i t i e s o f c o n s t r a i n t s
I S i m u l t a n e o u s o p t i m i z a t i o n b y n o n l i n e a r p r o g r a m m i n g I b a s e d o n g r a d i e n t s ( s e n s i t i v i t i e s ) [ I m p r o v e m e n t o f d e s i g n p a r a m e t e r s o f s t r u c t u r a l a n d c o n t r o l s y s t e m s ]
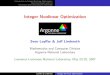
o p t i m a l i t y J y e s Fig. 1. Flowchart of s imul taneous optimization.
unifying the objective functions of the structural system and the performance index of the control system. For example, it can be written:
J=J(Js, Jc) (15)
and if we have two objective functions Js and J¢ the most simple way to unify Js and Jc is given by
J=IIL, Jcll [(wsj + P"/P = WcJ¢) ] , (16)
which is called "lp-norm", and various norms can be expressed by choosing the value of factor p; p = 1 for simple weighting, p = 2 for root-mean-squared values, p = oo for the Tchebycheff norm. For reference, the form of the vector objective function is:
j = {j; , j~ . . . . , j~, j~, . . .}T. (17)
It is necessary to have a sensitivity of the unified objective function, o r, to carry out a simultaneous optimization. Then the differentiation of eqn. (16) with respect to the total design variables in eqn. (14) gives
aj aJo = _ _ + - - . ( 1 8 )
Oxj 0xj Oxj
The first and the second terms on the right-hand side of eqn. (18) can be calculated by the methods stated in the previous sections. The basic flow of the calculation for simultaneous optimization is summarized in Fig. 1.
Here we have to refer to the unified method for modelling and carrying out the dynamic analysis of structural and control systems. Each system has different elements, that is, the structural system has structural (mechanical) elements and the control system electrical elements. Though different analyses can be applied to both systems, it is not so convenient in general due to paying much attention individually to the formation of the total system. To tackle these problems, an analogy was adopted. It is known that alternative types of analogies between structural (mechanical) and electrical systems can exist. For instance, two types of

168 H. Yamakawa / Simultaneous optimization of structural and control systems
T ab l e 1
F o r c e - c u r r e n t analogy
E lec t r i c a l s y s t e m
C u r r e n t i [A]
V o l t a g e e [V]
R e s i s t a n c e
°4a O O
o o R
O O I n d u c t a n c e
L
o O O
' " O o L ~ O O
C a p a c i t a n c e C
o I I o
0 0 0 0
c ~ _ , O O
L i n e a r m o t i o n
F o r c e f [N]
V e l o c i t y v t in/s]
V i s c o u s D a m p .
0 o I II o
D
D o II o Spr ing
O O
M a s s
o I m l O
R o t a t i n g T o r q u e x [ N m ]
A n g . VeL v [ rad/s]
V i s c u o s D a m p .
\ B
t ~ u
S p r i n g G
• ~ J [ , 3
t. G ~ tJ
I n e r t i a M o m e n t
T r a n s d u c e r C a n t i l e v e r G e a r
Table 2 F0rce-v01tage analogy
Electrical s y s t e m L i n e a r m o t i o n R o t a t i n g
V o l t a g e e [V] F o r c e f IN] T o r q u e z [ N m ]
C u r r e n t i [A] V e l o c i t y v t in/s] A n g . Vel . v [ rad/s]
R e s i s t a n c e
O O
o o R
0 0 I n d u c t a n c e
L
o O O 0 0 Le 0 0
C a p a c i t a n c e C
o II o
O O O O
O O T r a n s d u c e r
V i s c o u s D a m p .
0 0 !
I | i 0 Ul
D
D o :: II o
M a s s
o [ - ~ o
V i s c u o s D a m p . B
~ t, Inertia M o m e n t
1,'n
S p r i n g 0 0
c k ~
C a n t i l e v e r
Sp r ing
13 t [ 1 t
G e a r
analogies between structural (mechanical) and electrical elements are shown in Tables 1 and 2.
There are many combinational approaches to expressing the system arising from those analogies , as shown in Fig. 2. T h e m e t h o d adopted here is to express all electrical e l e m e n t s in terms of structural (mechanica l ) analogues , and the total sys tem is expressed in unified

11. Yamakawa / Simultaneous optimization of structural and control systems 169
Electric System I Direct Analogy i Mechanical System (Series: G.C.L)I-~b------- (Analog) ~ / (Series: D.M.K) CurreiS°urce I ~ ' ~ J I
Dual
Electric System (Cascade: R.C.L) Voltage Source E
Dual0g Dual
Mechanical System Direct Analogy ~ (Cascade:I/D.I/M.I/K
(Analog) Velocity Source Fig. 2. Various relations between two systems.
structural (mechanical) terms since there exist many good computer software programs for structural analysis which may help us a lot to analyse them. Thus we can analyse the total system easily by the adopted method using computer software of structural systems.
Demonstration application of the proposed method (Simultaneous optimization for structural control systems of a flexible robot arm)
Flexible robot arm and position control system
To show the validity and the effectiveness of the proposed simultaneous optimization method, the position control problems of flexible robot arms were taken as demonstration examples. Optimum shapes and optimum control parameters are of interest, to reduce the weight of the arms, the energies of vibration and the control forces.
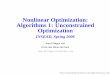
Figure 3 shows a typical layout of 1-1ink and 2-1ink flexible robot arms for experiments to be compared with numerical results. The flexible arms are made of duralumin and driven
I Fig. 3. Two-link flexible robot arm

170 H. Yamakawa / Simultaneous optimization of structural and control systems
+ ~ phase compensation
positional sensor velocity sensor t - - strain sensor t Fig. 4. Positional control system.
directly in the horizontal direction by the motors attached at each joint. We considered a position control problem, to stop the tips of the arms at a specified position. The rotational angular displacements, the rotational angular velocities and the strains of the arms near the joints, and others, were the feedback quantities. The block diagram of the control system is shown in Fig. 4. In the early study [6], to control the position of the 1-1ink flexible arm, the analogue circuit shown in Fig. 5 was used and some constants of the circuit were also taken as the design variables. Digital feedback control systems were used to control the positions of the 2-1ink flexible arms in the succeeding study [8]. We applied the proposed method to this system in order to check the validity of the method and its effectiveness in generating the optimum shapes of the arms, optimum feedback gain coefficients, and others, in comparison with experimental results.
Analysis of flexible robot arms with controller
(a) Structural analysis of flexible robot arms In the structural analysis, we took the coordinate system and variables as shown in Fig. 6.
The arms were treated as elastic beams with stepwise cross-sections, assuming small deflec-
201~
lOI~ lOI~
"X'Xl01~
201~ ~ ~ 5 1 ~ 2 ~ 2SB434 T I 6 V 101~--~, 1 I~
I I L _ _ l L _ _ J t l Gain Control P h a s e Amplifying Driving System
Compensation Gain Fig. 5. Summing amplifier circuit.

tt. Yamakawa / Simultaneous optimization of structural and control systems 171
y, V2-..--~ Vll m 2 , j r2
02 ()2
Link~ ~ O 2 ~ - '"', ['1
01 x-
Vi
o % (~)~Tmi
~ K~i
kai Rai
{ Laiqt't-R aiCli+Kvi0r:V 2i
KTi(l~Tmi
Fig. 6. Coordinates and displacements. Fig. 7. Equivalent circuit of a motor.
tions. The damping was assumed to be of the Rayleigh type. The motor masses were lumped at the joints.
Hence we derived the following equations of motion:
Msij, + Csqs + K, qs = Qs . (19)
(b) Analysis of electrical control system To analyse the dynamics of the control network, electrical network theory was used to
derive the fundamental equation of the network. Then the motors were simulated by the equivalent networks, as shown in Fig. 7. Such nonlinearities as the saturation phenomena of the operational amplifier and the insensible areas of the torques due to Coulomb damping
R 1
Vl V2i _ - - -
-Vsi : g Vii > Vsi V2i = -gVli : -Vsi<gV2i < Vsi
Vsi :gVli<- Wsi
Fig. 8. Nonlinear characteristics of the operational amplifier.
To
T~
...""
near ,-
IE -mm Tf~=
-Tf0i : 0z>0,KTili>Tf0i -KTili :[KTiI~<Tf0i Tf0i : 01<0,KTili<-Tf0i Fig. 9. Nonlinear characteristics of the
insensible torque.

172 H. Yamakawa / Simultaneous optimization of structural and control systems
Table 3 Optimization problem
Optimal control Combined problem
Feedback gain Feedback gain Mass ratio of beam element
Design variables
Constraints
Objective function
Constant total mass
J = f3(qTWq + pu 2) dt
where W = diag{1.0, 0.01, 0.01 . . . . . 0.01, 10.0} p=O.1
were considered in the analysis, as in Figs. 8 and 9. The resulting equations of the network, for example, for the 2-1ink flexible arm, were given by
h Zaiqi + Raiqi --I- g v i d i = Z i l f ( O c i - 0i) - h i 2 f 0 i + ~e2Ai3fEltOi2, (20)
KTi¢~i = KTi + Tfi . (21)
Applying the analogies in Table 1 or 2 to these equations, we can derive the same type of equation as for the structural system:
M# + Cq + Kq = Q. (22)
Simultaneous optimization problems and numerical results
Various types of paths are possible to move the tip of the arm to the specified position, due to any combination of many parameters of the system, for example, the initial positions, initial velocities, and initial rotational angles. We set up two kinds of problems in the previous work [6,8]. One is the position control problem of a 1-1ink arm, and the other the position control problems of a 2-1ink arm. In the following, the simultaneous optimization problems and numerical results will be shown for each problem.
(1) Position control problem of I-link arm [6] In this case, the 1-1ink arm is allowed to swing by 90 degrees from the rest position and the
resulting residual transient vibration is to be minimized by the proposed simultaneous
1 2 t i re i,~c 3
oo / ' ~ COWBI.'iED OPTIMIZATION <~ "60 " PROBL.~W
-90 Fig. 10. Point displacement response.
0 . . . . . ~ ..~'--~--~ 2
s, ........ :.,:, ...........
_ o7 i - - ................... Fig. 11. Angular response.

H. Yamakawa / Simultaneous optimization of structural and control systems
Table 4 Optimization problem
173
Design Mass ratio of arm x~, x2, x3, x 4
variables Feedback gain f O , f O , f ¢ Phase compensation constant T, a Voltage amplifying gain g
Objective 4 function J = f}(yTWy + pU 2) dt + v X i "u
i = l
/ i d uc vibration input re tion of control energy weight
Y = {W1, t~l, W2, ~2 , W3, ~3, W4, t~4, 0,
WI, ~I, W2, ~2, W3, (~3, W4, (~4, 01
Constraints Side constraint: minimum breadth of beam gz=bj-bmin>lO b j = x j / n b
Stress constraints at fixed part of arm 1/2
Initial value
(1/4, 1/4, 1/4, 1/4) (1, 1, 1) (0.01, 1.5) (5)
optimization. First, we showed the effectiveness of simultaneous optimization by comparing the numerical results with ones generated by using only the optimal control theory.
The problems and the results are shown in Table 3 and Fig. 10. The results of simultaneous optimization problems in Table 4 are shown in Fig. 11, and they show good agreement.
9 0 °
Fig. 12. Rotational angles of the link.
a r m @ -- r
a r m ® _ _ J
Fig. 13. Optimum shapes of arms.
Table 5 Simultaneous optimization problem
Design
variables
Constraints
Objective function
Arm width x z, x2, x3, x4, x5, x 6
Feed back gain f01, f01, rE1, f02, f02, f¢2
Arm width Xi,mi n ~< X i <~ Xi,ma x Feed back again - 2 < f ~< 2 Stress of arm 2 g2 >/0
J= f:yT(w 1 d- GTw2G)y dt + v E (~xi -t- 1~-15Xi+3 ) i = 1
Tip mass 8.00 g

174 H. Yamakawa / Simultaneous optimization of structural and control systems
Table 6 Results of simultaneous optimization
Initial Optimum
Objective function Mass Stress integral
Arm width
Feed back gain
1.99 1.55 100% 78.9% 1.93 × 10 x3 9 . 3 0 × 1012
1 1.00 0.950 1.00 0.816 1.00 0.803
2 1.00 1.22 1.00 0.400 1.00 0.217
fO~ 1.00 0.154 f01 1.00 0.987 fO 2 1.00 0.486 f02 1.00 1.48
-4 2.0x10
c
0 co
- 2 . 0 x l 0 -4
Theoretical
Experimental
3 4 Time
5 S
Fig. 14. Comparison with modeled exper iment.
0.4
0.2 <
0.8
0.6
0.0
INITIAL
OPTIMUM
~ - J 2 3 4 Time s
I
5 - 0 . 2 Fig. 15. Angular response of arm 1.

H. Yamakawa / Simultaneous optimization of structural and control systems 175
" o
==
2.0
1.5
1.0
0.5
0.0
-1.0
Y----/2
INITIAL
OPTIMUM
3 4 5 Time s Fig. 16. Angula r response of a n n 2.
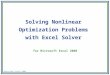
(2) Position control problem of 2-1ink arm [8] We introduce the numerical results by restricting the case to the rotational angles and the
tip position of the arms as specified in Fig. 12. The simultaneous optimization problems considered here are shown in Table 5. The typical numerical results are shown in Table 6 and Figs. 13-16.
It is seen that the numerical results agree well with the experimental results, and that the simultaneous optimization was very effective in comparison with the results obtained by only optimal control.
Conclusions
(1) The proposed method of simultaneous optimization of structural and control systems with nonlinear properties in our previous work was reviewed, and we show the applications of the position control problems of flexible robot arms.
(2) Nonlinearities related to the saturation of operational amplifiers and the insensible parts of torques were considered, and dynamic analysis and sensitivity analysis were carried out in the same step-by-step integration scheme.
(3) In the demonstration numerical examples, the minimum weight design and optimal regulator problems in the overall position control problems of the arms were solved simultaneously by the proposed method, and the optimum shapes of the arms and optimum parameters of the control systems were determined by the proposed method.
(4) Through comparison with experimental results and the results obtained by using only the optimal control theory, the validity and effectiveness were confirmed.
We would like to add the following point. A simultaneous optimization method to consider the geometrical nonlinearity and the robustness and stability, based on the previous work, will be newly shown in Ref. [12].
Acknowledgement
The author would like to acknowledge the following people who helped considerably in the development of the computer program used and the proposed methods, and provided several numerical examples and experiments in the course of master and bachelor theses at Waseda University: Messrs K. Kawata, K. Hashimoto, J. Shirakata and T. Ohishi.

176 14. Yamakawa / Simultaneous optimization of structural and control systems
References
[1] J.L. JUNKINS, D.S. BODDEN and J.D. TURNER, "A unified approach to structure and control system design iteration", Proc. 4th Int. Conf. on Applied Numerical Modelling, Tainan, Taiwan, pp. 483-490, 1984.
[2] D.F. MILLER and J. SHIM, "Combined structural and control optimization for a flexible system using a gradient based search", Proc. AL4,4 24th Aerospace Science Meeting, pp. 1-15, 1986.
[3] N.S. KHOT, "Structural and control optimization with weight and Frobenius norm as performance function", in: Structural Optimization, Kluwer Academic Publisher, pp. 151-158, 1988.
[4] J. ONODA and R.T. HAFTKA, "An approach to structural control simultaneous optimization for large flexible spacecraft", A/AA J. 25(8), pp. 1133-1138, 1988.
[5] S.S. RAO, "Combined structural and control optimization of a flexible structure", Eng. Optim. 13, pp. 1-16, 1988.
[6] H. YAMAKAWA, "A unified method for combined structural and control optimization of nonlinear mechanical and structural systems", in: Computer-Aided Optimum Design of Structures, Vol. 2, Springer-Verlag, Berlin, pp. 287-298, 1989.
[7] H. YAMAKAWA, "Simultaneous optimization of structural and control systems", Proc. JSCE Syrup. on System Optimization, pp. 175-12, 1989 (in Japanese).
[8] H. YAMAKAWA, K. HASHIMOTO and J. SmRAr, ATA, "A study on simultaneous optimization of nonlinear properties", Proc. JSME Syrup. on Motion and ~bration Control 910 (52), pp. 137-142, 1991 (in Japanese).
[9] V.A. VENKAYYA, V.A. TISHER and N.S. KnoT, "Dynamics and control of space structure", Eng. Optim. l l , pp. 251-263, 1987.
[10] S.S. RAO and T.S. PAN, "Robustness improvement of actively controlled structures through structural modifica- tions", AZAA J. 28(2), pp. 353-361, 1990.
[11] H. YAMAKAWA, "Optimum structural design for dynamic response", in: New Directions in Optimum Structural Design, edited by ATRE et al., Wiley, New York, Chap. 11, pp. 249-266, 1984.
[12] H. YAMAKAWA, "Simultaneous optimization of nonlinear structural and control systems", AIAA Paper 92-4742, 4th AIAA /Airforce /NASA / OAl Syrup. on Multidisciplinary Analysis and Optimization, Cleveland, OH, pp. 415-423, 1992.