Embed Size (px)
Citation preview

Drivteknikk \ Automatisering \ Systemløsninger \ Service
Styring MOVI-PLC® advancedDHE41B/DHF41B/DHR41B
HåndbokUtgave 04/200816623320 / NO

SEW-EURODRIVE – Driving the world
Innhold
1 Generelle merknader ............................................................................................. 51.1 Oppbygging av sikkerhetsmerknadene.......................................................... 51.2 Garantikrav .................................................................................................... 51.3 Ansvarsfraskrivelse ........................................................................................ 61.4 Merknader til opphavsrett............................................................................... 6
2 Sikkerhetsmerknader............................................................................................. 72.1 Tilleggsdokumentasjon .................................................................................. 72.2 Sikkerhetsfunksjoner...................................................................................... 72.3 Applikasjon med løfteanordning..................................................................... 72.4 Avfallshåndtering ........................................................................................... 7
3 Innledning ............................................................................................................... 83.1 MOVI-PLC® – Motion Control med integrert styreteknikk .............................. 83.2 Styring MOVI-PLC® advanced DH.41B ......................................................... 9
4 Monterings-/installasjonsmerknader.................................................................. 144.1 Monteringsmuligheter for styring MOVI-PLC® advanced DH.41B ............... 144.2 Montering MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B.......... 144.3 Montering av styring MOVI-PLC® advanced DHE41B................................. 16
4.3.1 Funksjonsbeskrivelse av klemmene, DIP og LED ............................ 164.3.2 Tilkobling av binære inn- og utganger (plugg X31) ........................... 174.3.3 Tilkobling systembuss CAN 2 (plugg X32) / CAN 1 (plugg X33) ...... 184.3.4 Tilkobling RS485-grensesnitt (plugg X34) ........................................ 194.3.5 Tilkobling systembuss Ethernet 1 (plugg X36) .................................. 204.3.6 Tilkobling av Ethernet-2-grensesnitt (plugg X37) .............................. 204.3.7 Driftsindikatorer for styring MOVI-PLC® advanced DHE41B ............ 214.3.8 DIP S1 default IP-adresse ................................................................ 234.3.9 SD-minnekort type OMH41B-T. ........................................................ 23
4.4 Montering av styring MOVI-PLC® advanced DHF41B................................. 244.4.1 Funksjonsbeskrivelse av klemmene, DIP og LED ............................ 244.4.2 Tilkobling PROFIBUS (plugg X30P) ................................................. 264.4.3 Tilkobling DeviceNet (plugg X30D) ................................................... 274.4.4 Tilkobling SafetyBus (plugg X38) ...................................................... 284.4.5 Driftsindikatorer for styring MOVI-PLC® advanced DHF41B ............ 29
4.5 Montering av styring MOVI-PLC® advanced DHR41B ................................ 324.5.1 Funksjonsbeskrivelse av klemmene, DIP og LED ............................ 324.5.2 Kontaktterminering ............................................................................ 344.5.3 Avskjerm og forlegg buskabelen ....................................................... 354.5.4 Innstilling av DIP 20 og 21 ................................................................ 354.5.5 TCP / IP-adressering og subnett ....................................................... 364.5.6 Driftsindikatorer for styring MOVI-PLC® advanced DHR41B i
PROFINET-drift ................................................................................. 384.5.7 Stille inn IP-adresseparametere via DCP ......................................... 404.5.8 Driftsindikatorer for styring MOVI-PLC® advanced DHR41B
i EtherNet/IP-drift .............................................................................. 414.5.9 Stille inn IP-adresseparameter .......................................................... 434.5.10 Den integrerte Ethernet-svitsjen ....................................................... 45
4.6 Installasjon av opsjon DH.41B i MOVIDRIVE® MDX61B............................. 464.7 Installasjon av opsjon DH.41B i MOVIAXIS®-mastermodul......................... 46
4.7.1 Funksjonsbeskrivelse av klemmene X5a / X5b (MOVIAXIS®-mastermodul) .............................................................. 46
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
3
4
nnhold
4.8 Installasjon av opsjon DH.41B i MOVITRAC® B/kompaktstyring................. 484.8.1 Funksjonsbeskrivelse av klemmene og LED .................................... 484.8.2 Forbindelse RS485-grensesnitt COM 1 (plugg X24) ........................ 484.8.3 Tilkobling systembuss CAN 1 / spenningsforsyning (plugg X26) ...... 494.8.4 Driftsangivelser opsjonsinnstikksplass MOVITRAC® B /
kompaktstyring .................................................................................. 504.9 Engineering-grensesnitt til styringen MOVI-PLC® advanced DH.41B ......... 514.10 Avskjerm og forlegg buskabelen.................................................................. 51
5 Prosjektering og igangsetting............................................................................. 525.1 Prosjektering med PC-programvare MOVITOOLS® MotionStudio .............. 525.2 Prosjektering og igangsetting av drivenhetene ............................................ 585.3 Prosjektering og igangsetting i PLC-redigeringsprogrammet....................... 585.4 Fremgangsmåte ved apparatutskiftning....................................................... 58
6 Feildiagnostikk ..................................................................................................... 596.1 Diagnostikkforløp systembuss CAN 1 / CAN 2 ............................................ 596.2 Diagnostikkforløp PROFIBUS-DP................................................................ 60
7 Tekniske data og målskisser............................................................................... 617.1 Generelle tekniske data .............................................................................. 617.2 Styring MOVI-PLC® advanced DHE41B...................................................... 627.3 Styring MOVI-PLC® advanced DHF41B...................................................... 647.4 Styring MOVI-PLC® advanced DHR41B...................................................... 657.5 Kompaktstyring MOVI-PLC® advanced ....................................................... 657.6 Målskisser for kompaktstyring MOVI-PLC® advanced DH.41B / UOH..B.... 66
7.6.1 Målskisse DHE41B / UOH11B .......................................................... 667.6.2 Målskisse DHF/DHR41B / UOH21B ................................................. 67
8 Indeks.................................................................................................................... 68
I
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

1Generelle merknaderOppbygging av sikkerhetsmerknadene
1 Generelle merknader1.1 Oppbygging av sikkerhetsmerknadene
Sikkerhetsmerknadene i denne håndboken er bygd opp på følgende måte:
1.2 GarantikravForutsetning for feilfri drift og for eventuelle garantikrav er at dokumentasjonen følges.Les derfor håndboken før arbeidet med enheten startes opp!Sørg for at håndboken er tilgjengelig i leselig tilstand for de som er ansvarlige for anleggog drift, samt for personer som arbeider på enheten på eget ansvar.
Symbol SIGNALORD!Type risiko og risikoens kilde.Mulige følger ved neglisjering.• Tiltak for å forhindre risikoen.
Symbol Signalord Forklaring Følger ved neglisjeringEksempel:
Generell risiko
Spesiell risiko,f.eks. elektrisk støt
FARE! Umiddelbart overhengende fare Livsfare eller alvorlige personskader
ADVARSEL! Mulig farlig situasjon Livsfare eller alvorlige personskader
FORSIKTIG! Mulig farlig situasjon Lette personskader
STOPP! Mulige materielle skader Skader på drivsystemet eller omgivelsene
MERK Nyttig merknad eller tips.Letter håndteringen av drivsystemet.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
5
1 enerelle merknadernsvarsfraskrivelse
6
1.3 AnsvarsfraskrivelseFor å oppnå sikker drift og for at angitte produktegenskaper og ytelser skal nås, er deten grunnleggende forutsetning av MOVIDRIVE®-dokumentasjonen følges nøye. SEW-EURODRIVE påtar seg intet ansvar for personskader, materielle eller formuesskadersom måtte oppstå fordi driftsveiledningen ikke følges. Produktansvar utelukkes i slike til-feller.
1.4 Merknader til opphavsrett© 2007 – SEW-EURODRIVE. Alle rettigheter forbeholdt.Enhver form for mangfoldiggjøring, bearbeiding, publisering og annen bruk – ogsåutdragsvis – er forbudt.
GA
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

2SikkerhetsmerknaderTilleggsdokumentasjon
2 Sikkerhetsmerknader2.1 Tilleggsdokumentasjon
• Må kun installeres og settes i drift av elektrofagfolk under overholdelse av de gyldigeforskriftene for forebygging av ulykker og driftsveiledningene MOVIDRIVE®
MDX60B/61B, MOVITRAC® B og MOVIAXIS®:• Les nøye gjennom denne håndboken før opsjon DH.41B installeres og settes i drift.• Forutsetning for en feilfri drift og for eventuelle garantikrav er at dokumentasjonen
følges.
2.2 SikkerhetsfunksjonerOmformerne MOVIDRIVE® MDX60B/61B får ikke ivareta sikkerhetsfunksjoner utenoverordnede sikkerhetssystemer. Bruk overordnede sikkerhetssystemer for å garanteremaskin- og personsikkerheten. Forviss deg om at opplysningene i "Sikker utkoblingMOVIDRIVE® MDX60B/61B" følges for sikkerhetsbruk.
2.3 Applikasjon med løfteanordningMOVIDRIVE® MDX60B/61B, MOVITRAC® B og MOVIAXIS® skal ikke brukes somsikkerhetsanordning i applikasjoner med løfteanordninger. Bruk overvåkingssystemer eller mekaniske verneinnretninger som sikkerhetsanordningfor å unngå personskader eller materielle skader.
2.4 Avfallshåndtering
Følg aktuelle nasjonale bestemmelser:Kasser komponentene, eventuelt også adskilt etter egenskaper og gjeldende lands-spesifikke forskrifter, for eksempel som:• elektronikkavfall• kunststoff• stålplater• kobber
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
7
3 nnledningOVI-PLC® – Motion Control med integrert styreteknikk
8
3 InnledningHåndbokens innhold
Denne brukerhåndboken beskriver:• monteringen av styringen MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B• grensesnitt og lysdioder til styring MOVI-PLC® advanced DH.41B• installasjon av styringen MOVI-PLC® advanced DH.41B i omformere MOVIDRIVE®
MDX61B og MOVITRAC® B, i servoforsterker MOVIAXIS® og som kompaktstyring• engineering-tilgang til styring MOVI-PLC® advanced DH.41B• prosjektering og idriftsettelse av styringen MOVI-PLC® advanced DH.41B og styrt
omformer og servoforsterker
Videreførende litteratur
For enkel og effektiv engineering av styringen MOVI-PLC® advanced DH.41B bør dubestille videreførende dokumentasjoner i tillegg til denne håndboken:• Håndbok "MOVI-PLC® advanced DHF41B feltbussgrensesnitt PROFIBUS DP-V1
og DeviceNet"• Håndbok "MOVI-PLC® advanced DHR41B feltbussgrensesnitt PROFINET IO,
EtherNet/IP, Modbus TCP/IP"• Systemhåndbok "MOVI-PLC®-programmering i PLC-redigeringsprogram"• Håndbok "Bibliotek MPLCMotion_MDX og MPLCMotion_MX for MOVI-PLC®"• Håndbok "Bibliotek MPLCMotion_MC07 og MPLCMotion_MM for MOVI-PLC®"• Systemhåndbok MOVIDRIVE® MDX60B/61B• Systemhåndbok MOVITRAC® B• Systemmappe MOVIAXIS®
Systemhåndboken "MOVI-PLC® programmering i PLC-redigeringsprogrammet" inne-holder veiledning for programmering av MOVI-PLC® iht. standard IEC 61131-3.Bibliotekhåndbøkene beskriver Motion-bibliotekene for MOVI-PLC® for styring avomformer MOVIDRIVE® MDX60B/61B, MOVIAXIS®, MOVITRAC® B og MOVIMOT®.
3.1 MOVI-PLC® – Motion Control med integrert styreteknikkEgenskaper MOVI-PLC® er en serie med programmerbare logiske styringer for omformere. De
muliggjør en komfortabel og effektiv automatisering av drivløsningen, logikkbearbei-delse og forløpsstyringer ved hjelp av programmeringsspråkene iht. standardIEC 61131-3.• MOVI-PLC® er gjennomgående pga. den optimerte styringen av hele SEW-omfor-
merportfolios og den enkle oppgraderingen til mer effektiv MOVI-PLC® pga. pro-grammenes gjennomgående forløpsevne.
• MOVI-PLC® kan skaleres pga. flere forskjellige maskinvareplattformer (basic,advanced, ...) og modulære programvarekonsepter (bibliotek for tallrike applika-sjoner).
• MOVI-PLC® er effektiv pga. omfattende teknologier (f. eks. kurveskive, synkronløp)og styringen av kravfulle applikasjoner (f. eks. handling).
IM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

3InnledningStyring MOVI-PLC® advanced DH.41B
Styringsklasser • MOVI-PLC® basic DHP11B muliggjør utførelsen av koordinerte enkelaksebeve-gelser og innbinding av eksterne inn- / utganger og Drive Operator Panel (DOP).Dermed er MOVI-PLC® basic DHP11B egnet som modulstyring eller også som standalone-styring for maskiner med middels kompleksitet.
• MOVI-PLC® advanced DH.41B utmerker seg i tillegg med et større grensesnittmang-fold og økt ytelsesevnen, som også muliggjør komplekse beregninger og f.eks. inter-polerte bevegelser. MOVI-PLC® advanced er derfor egnet for maskin- og celleauto-matisering. Over det integrerte Ethernet-grensesnittet kan MOVI-PLC® advancedforbindes direkte med styrenivået.
3.2 Styring MOVI-PLC® advanced DH.41BEgenskaper Styringen MOVI-PLC® advanced DH.41B kan fås i to utforminger:
• som styringskort MOVI-PLC® advanced DH.41B som opsjon for omformereMOVIDRIVE® B og MOVITRAC® B og servoforsterker MOVIAXIS®
• som kompaktstyring MOVI-PLC® advanced DH.41B forberedt for montering på enkapselskinne. Som kompaktstyring er den konstruert for å styre omformere (Æ kap."Tekniske data").
Enhetsutførelser Styringen MOVI-PLC® advanced DH.41B er tilgjengelig i 3 utføringer som skiller seg frahverandre på eksisterende feltbussgrensesnitt:
Engineering Engineering av styringen MOVI-PLC® advanced DH.41B omfatter følgende tiltak:• Konfigurasjon• Parametrisering• ProgrammeringEngineering utføres med hjelp av engineering-programvare MOVITOOLS®-Motion-Studio. Denne programvaren har mange forskjellige, effektive komponenter for idriftset-telse og diagnostikk av alle enheter fra SEW-EURODRIVE. Forbindelsen mellom styringMOVI-PLC® advanced DH.41B og engineering-PC opprettes via Ethernet-2-kommuni-kasjonsgrensesnittet.
Kommunika-sjonsgrensesnitt
Styringen MOVI-PLC® advanced DH.41B har mange kommunikasjonsgrensesnitt.De to systembussgrensesnittene CAN 1 og CAN 2 brukes foretrukket til tilkobling og sty-ring av flere omformere og innbinding i desentrale I/O-moduler. Maskinmodulen som dannes på denne måten kan du bruke over et integrert feltbuss-grensesnitt på en overordnet styring.Engineering foregår via det integrerte Ethernet-2- kommunikasjonsgrensesnittet.Til RS485-grensesnittene kobles et operatørpanel (f.eks. DOP11B) eller en girmotormed integrert frekvensomformer MOVIMOT®.
Enhetsutførelse MOVI-PLC®
advanced DH.41BFeltbussgrensesnitt
DHE41B Ethernet TCP/IP, UDP
DHF41B Ethernet TCP/IP, UDP, PROFIBUS DP-V1, DeviceNet
DHR41B Ethernet TCP/IP, UDP, PROFINET, EtherNet/IP, ModbusTCP/IP
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
9
3 nnledningtyring MOVI-PLC® advanced DH.41B
10
Automatise-ringstopologier
Bruk som standalone maskinstyringDu kan bruke styringen MOVI-PLC® advanced DH.41B som styringsenhet av enkomplett maskin. Hvis en gir avkall på den overordnede PLS-en overtar styringen MOVI-PLC® advancedDH.41B alle styringsoppgaver inklusive styringen av drivenheter, ytterligere aktuatorerog evalueringen av desentrale inn- og utganger. I stand alone-topologien overtar operatørpanelene (DOP11B) grensesnittfunksjonenmellom menneske og maskin.MOVI-PLC® advanced DH.41B kan du koble direkte til Ethernet-firmanettet.
60544AXXFig. 1: Eksempel på en topologi for standalone styring av en komplett maskin med styringen
MOVI-PLC® advanced DH.41B
[1] Operatørpanel (f.eks. Drive Operator Panel DOP11B)[2] Systembuss (CAN 1, CAN 2, Ethernet 1)[3] Inn- og utganger (klemmer)[4] Asynkron motor[5] Synkron servomotor / asynkron servomotor
RS485
RS485
ETHERNET
ETHERNET
IS
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

3InnledningStyring MOVI-PLC® advanced DH.41B
Bruk som modulstyringDu kan også bruke styringen MOVI-PLC® advanced DH.41B til desentral automatise-ring av en maskinmodul (Æ følgende bilde). Ved dette koordinerer styringenMOVI-PLC® advanced DH.41B bevegelsesforløpene i akselforbindelsen. Tilkoblingen til overordnet PLS skjer valgfritt over et av de integrerte feltbussgrensesnit-tene.
58621AXXFig. 2: Eksempel på en topologi for styring av en maskinmodul gjennom en styring MOVI-PLC®
advanced DH.41B
[1] Overordnet PLS[2] Systembuss (CAN 1, CAN 2)[3] MOVIMOT® (over feltbussgrensesnitt DeviceNet MFD... / direkte tilkobling med
MOVI-PLC® over RS485-grensesnitt COM2)[4] Asynkron motor[5] Synkron servomotor / asynkron servomotor
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
11
3 nnledningtyring MOVI-PLC® advanced DH.41B
12
Systembusser (CAN 1, CAN 2 og Ethernet 1)
Ved tilkobling av flere omformere over en systembuss kan du bruke styringen MOVI-PLC® advanced DH.41B til styring av en maskinmodul. Styringen MOVI-PLC®
advanced DH.41B styrer alle drev innenfor maskinmodulen og avlaster dermed denoverordnede styringen (f. eks. maskiner/anleggs-PLS). Over systembussene CAN 1,CAN 2 og Ethernet 1 kan du koble maks. 64 av enhetene nedenfor til styringen MOVI-PLC® advanced DH.41B:• Frekvensomformer MOVITRAC® B• Drevomformer MOVIDRIVE® MDX60B/61B• Servoforsterker MOVIAXIS®
• Girmotorer med integrert frekvensomformer MOVIMOT® (feltbussgrensesnittDeviceNet MFD... påkrevd)
Konfigurering av PROFIBUS-grensesnitt
PROFIBUS-stasjonsadressen stilles inn med DIP-en, som er på forsiden av styringenMOVI-PLC® advanced DH.41B. Med den manuelle innstillingen kan du integrere ogkoble inn styringen MOVI-PLC® advanced DH.41B i løpet av kort tid i PROFIBUS-omgi-velsene. Overordnet PROFIBUS-master kan foreta parametriseringen automatisk(parameternedlasting). Denne varianten har følgende fordeler: • kort igangsettingstid av anlegget• enkel dokumentasjon av applikasjonsprogrammer, for alle viktige parameterdata kan
overleveres fra programmet til overordnet styring.
Syklisk og asyklisk datautveksling over PROFIBUS- DP
Mens prosessdatautvekslingen vanligvis skjer syklisk leses eller skrives drivparame-terne asyklisk over funksjoner som Read og Write eller over MOVILINK®-parameter-kanal. Denne parameterdatautvekslingen tillater applikasjoner hvor alle viktige drivpa-rametrer er avlagt i overordnet automatiseringsapparat, slik at det ikke må foregå enmanuell parametrisering på omformer.
Syklisk og asyklisk datautveksling over PROFIBUS- DP-V1
Med PROFIBUS-DP-V1-spesifikasjonen ble det innført nye asykliske Read/Write-tje-nester i rammen av PROFIBUS-DP-utvidelser. Disse asykliske tjenestene blir ført inn påspesielle telegrammer i kjørende syklisk busdrift, slik at kompatibiliteten mellomPROFIBUS-DP (versjon 0) og PROFIBUS-DP-V1 (versjon 1) er garantert.
PROFIBUS-over-våkingsfunksjoner
Bruk av et feltbussystem krever ytterligere overvåkingsfunksjoner for drivteknikken, somf.eks. tidsovervåking av feltbuss (PROFIBUS-timeout). Funksjonskomponenten som fårtilgang til PROFIBUS melder en PROFIBUS-timeout i form av en feilmeldingsinforma-sjon. Dermed kan det reageres på PROFIBUS-timeout i applikasjonen.
IS
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

3InnledningStyring MOVI-PLC® advanced DH.41B
RS485-grensesnitt COM1 og COM2
På RS485-grensesnitt COM 1 eller COM2 tilkobler du en av følgende enheter:• Operatørpanel DOP11B• Girmotor med integrert frekvensomformer MOVIMOT®
Ethernet 2 Følgende funksjoner og tilkoblinger kan opprettes via Ethernet-2- kommunikasjons-grensesnittet.• Engineering• Tilkobling av et operatørpanel DOP11B• PC-visualisering (for eksempel OPC-grensesnitt)• Tilknytning til styrenivået
Binære inn- og utganger
Med de binære inn- og utgangene kan du koble aktuatorer (f.eks. ventiler) og binæreinngangssignaler (f.eks. sensorer). De binære inn- og utgangene kan du bruke fritt iPLC-redigeringsprogrammet til programvaren MOVITOOLS® MotionStudio vedprogrammeringen.
Diagnostikk Lysdiodene til styring MOVI-PLC® advanced DH.41B indikerer følgende tilstander:• Spenningsforsyning til binære inn- og utganger• Generell status til styringen MOVI-PLC® advanced DH.41B• Status for styreprogram• Status for PROFIBUS-grensesnitt• Status for DeviceNet-grensesnitt• Status for Ethernet-grensesnitt• Status for de to CAN-grensesnitteneDu kan tilkoble operatørpaneler i forbindelse med diagnostikk. Operatørpanelenekobles fortrinnsvis på kommunikasjonsgrensesnitt Ethernet 2.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
13
4 onterings-/installasjonsmerknaderonteringsmuligheter for styring MOVI-PLC® advanced DH.41B
14
4 Monterings-/installasjonsmerknader4.1 Monteringsmuligheter for styring MOVI-PLC® advanced DH.41B
Vær oppmerksom på følgende ved montering:
4.2 Montering MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B• Styringen MOVI-PLC® advanced DHE41B må stikkes på feltbussplassen til
MOVIDRIVE® MDX61B. Hvis feltbusskontakten er opptatt, kan opsjon DHE41Bogså plugges inn på innstikkplassen for utvidelse.
• Styringen MOVI-PLC® advanced DHF41B/DHR41B må settes på feltbussinnstikks-plassen eller utvidelsesstikkplassen til MOVIDRIVE® MDX61B. Montering iMOVIDRIVE® MDX61B byggstørrelse 0 er ikke mulig.
Før du begynner Utfør følgende tiltak før styringen MOVI-PLC® advanced DH.41B monteres ellerdemonteres:• Sett drivomformeren uten spenning. Slå av DC 24 V og nettspenningen.• Du må sikre deg med egnede tiltak (avledningsbånd, sko med ledeevne osv.) mot
elektrostatisk utladning før du berører styringen MOVI-PLC® advanced DH.41B.• Ta av operatørpanelet og frontdekslet før du monterer styringen MOVI-PLC®
advanced DH.41B.• Plugg i frontdekslet og operatørpanelet igjen etter at du har montert styringen
MOVI-PLC® advanced DH.41B.• Styringen MOVI-PLC® advanced DH.41B må kun oppbevares i originalforpak-
ningen. Vent med å ta den ut til den skal monteres.• Ta kun tak i styringen MOVI-PLC® advanced DH.41B på kanten av kretskortet. Ikke
berør komponentene.• Legg aldri styringen MOVI-PLC® advanced DH.41B på et underlag med ledeevne.
MERKNADER• Du kan stikke styringen MOVI-PLC® advanced DH.41B inn i omformer
MOVIDRIVE® MDX61B, men ikke i omformer MOVIDRIVE®MDX60B.• Montering eller demontering av opsjonskort er kun mulig ved drivomformer
MOVIDRIVE® MDX61B byggstørrelse 1 til 6.• Kun SEW-EURODRIVE skal montere eller demontere opsjonskort i drivom-
former MOVIDRIVE® MDX61B byggstørrelse 0.• Kun SEW-EURODRIVE skal montere eller demontere styring MOVI-PLC®
advanced DH.41B i MOVIAXIS® eller montere kompaktstyring MOVI-PLC®
DH.41B/UOH..B.
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B
Prinsipiell fremgangsmåte ved inn- og utbygging av et opsjonskort i MOVIDRIVE® MDX61B
1. Løsne festeskruene tilopsjonskortholderen. Trekk opsjonskortholderen jevnt (ikke påsiden!) ut av innstikksplassen.
2. Løsne festeskruene til den svarte dekkplaten på opsjonskortholderen. Ta ut densvarte dekkplaten.
3. Sett opsjonskortet med festeskruene nøyaktig inn i hullene på opsjonskortholderen. 4. Sett opsjonskortholderen med montert opsjonskort med middels trykk inn i innstikks-
plassen igjen. Fest opsjonskortholderen igjen med festeskruene.5. Ved demontering av et opsjonskort går du frem i omvendt, logisk rekkefølge.
53001AXX
1.
3.
4.
2.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
15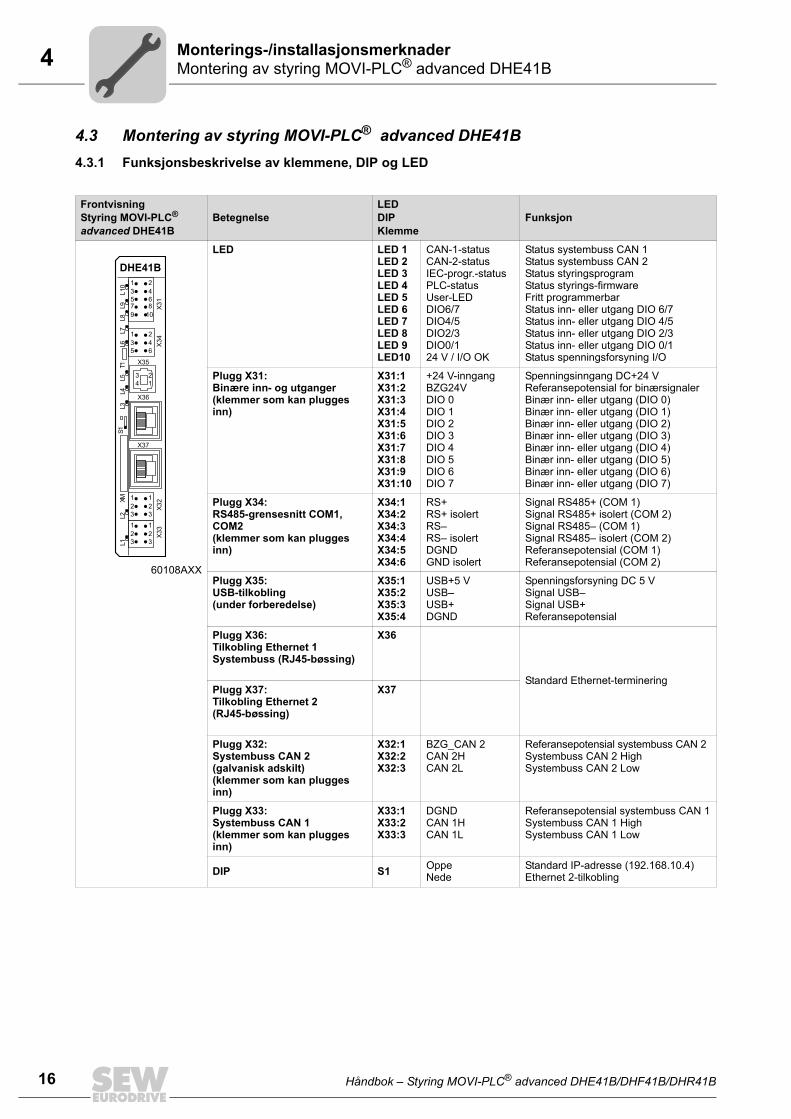
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHE41B
16
4.3 Montering av styring MOVI-PLC® advanced DHE41B4.3.1 Funksjonsbeskrivelse av klemmene, DIP og LED
FrontvisningStyring MOVI-PLC® advanced DHE41B
BetegnelseLEDDIPKlemme
Funksjon
60108AXX
LED LED 1LED 2LED 3LED 4LED 5LED 6LED 7LED 8LED 9LED10
CAN-1-statusCAN-2-statusIEC-progr.-statusPLC-statusUser-LEDDIO6/7DIO4/5DIO2/3DIO0/124 V / I/O OK
Status systembuss CAN 1Status systembuss CAN 2Status styringsprogramStatus styrings-firmwareFritt programmerbarStatus inn- eller utgang DIO 6/7Status inn- eller utgang DIO 4/5Status inn- eller utgang DIO 2/3Status inn- eller utgang DIO 0/1Status spenningsforsyning I/O
Plugg X31:Binære inn- og utganger(klemmer som kan plugges inn)
X31:1X31:2X31:3X31:4X31:5X31:6X31:7X31:8X31:9X31:10
+24 V-inngangBZG24VDIO 0DIO 1DIO 2DIO 3DIO 4DIO 5DIO 6DIO 7
Spenningsinngang DC+24 VReferansepotensial for binærsignalerBinær inn- eller utgang (DIO 0)Binær inn- eller utgang (DIO 1)Binær inn- eller utgang (DIO 2)Binær inn- eller utgang (DIO 3)Binær inn- eller utgang (DIO 4)Binær inn- eller utgang (DIO 5)Binær inn- eller utgang (DIO 6)Binær inn- eller utgang (DIO 7)
Plugg X34:RS485-grensesnitt COM1, COM2 (klemmer som kan plugges inn)
X34:1X34:2X34:3X34:4X34:5X34:6
RS+RS+ isolertRS–RS– isolertDGNDGND isolert
Signal RS485+ (COM 1)Signal RS485+ isolert (COM 2)Signal RS485– (COM 1)Signal RS485– isolert (COM 2)Referansepotensial (COM 1)Referansepotensial (COM 2)
Plugg X35:USB-tilkobling(under forberedelse)
X35:1X35:2X35:3X35:4
USB+5 VUSB–USB+DGND
Spenningsforsyning DC 5 VSignal USB–Signal USB+Referansepotensial
Plugg X36:Tilkobling Ethernet 1Systembuss (RJ45-bøssing)
X36
Standard Ethernet-termineringPlugg X37:Tilkobling Ethernet 2(RJ45-bøssing)
X37
Plugg X32:Systembuss CAN 2(galvanisk adskilt)(klemmer som kan plugges inn)
X32:1X32:2X32:3
BZG_CAN 2CAN 2HCAN 2L
Referansepotensial systembuss CAN 2Systembuss CAN 2 HighSystembuss CAN 2 Low
Plugg X33:Systembuss CAN 1(klemmer som kan plugges inn)
X33:1X33:2X33:3
DGNDCAN 1HCAN 1L
Referansepotensial systembuss CAN 1Systembuss CAN 1 HighSystembuss CAN 1 Low
DIP S1 OppeNede
Standard IP-adresse (192.168.10.4)Ethernet 2-tilkobling
X35
X36
X37
2
4
6
1
3
5
X3
4
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X32
X3
3
2
4
6
1
3
58
10
7
9
X31
T1S1
L1L2
L3L5
XML6
L7L8
L9L4
L10
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHE41B
4.3.2 Tilkobling av binære inn- og utganger (plugg X31)
Kontakten X31 har åtte binære inn- eller utganger (for eksempel for styring av eksterneaktuatorer/følere).Bruken av de binære inn- og utgangene kan du programmere i PLC-redigeringspro-grammet til programvaren MOVITOOLS® MotionStudio.
Binære innganger • De binære inngangene er potensialskilt med optokoblere.• Tillatte inngangsspenninger er spesifisert i henhold til IEC 61131.
+13 V ... +30 V = "1" = Kontakt lukket–3 V ... +5 V = "0" = Kontakt åpen
Interrupt-innganger • De binære inngangene X31:6 til X31:10 kan du bruke som interrupt-innganger.Reaksjonstiden før bearbeiding av ISR (interrupt-serviceroutine) er mindre enn100 ms.
Binærutganger • De binære utgangene er potensialskilt med optokoblere.• De binære utgangene er kortslutningssikre, men ikke sikre mot fremmed spenning.• Maksimalt tillatt utgangsstrøm er 150 mA pr. binærutgang. Alle åtte binærutganger
får brukes samtidig med denne strømmen.
• For å unngå farlige spenningstopper må man ikke tilkoble induktive laster utenfriløpsdiode med forsyningsspenningen eller på de binære inn- eller utgangene.
Kabelspesifikasjon • Det må kun tilkobles kabler med et ledertverrsnitt på minimalt 0,25 mm2 (AWG23) tilmaksimalt 1 mm2 (AWG18). I henhold til IEC 60999 er klemming uten endehylsermulig.
• Velg type og ledertverrsnitt til tilkoblet kabel avhengig av nødvendig kabellengde ogforventet belastning gjennom din bruk.
Nærmere informasjon angående de binære inn- eller utgangene finner du i kapitlet 8,Tekniske data, på side 61.
61018AXXFig. 3: Tolvpolet plugg for tilkobling av de binære inn- og utgangene
X3
1
1
3
5
7
9
2
4
6
8
10
STOPP!Forsyningsspenningen må ligge på pinne X31:1/2 når de binære inn- og utgangeneskal brukes. Styringen MOVI-PLC® kan ta skade. Den spesifiserte funksjonen til de binære inn- ogutgangene er da ikke lenger gitt.Hvis forsyningsspenningen kobles ut må du også slå av alle andre spenninger påX31:1 ... 10, f.eks. DC 24 V fra brytere og sensorer til de binære inngangene.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
17
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHE41B
18
4.3.3 Tilkobling systembuss CAN 2 (plugg X32) / CAN 1 (plugg X33)
Det er kun tillatt å koble maksimalt 64 enheter på systembuss CAN 2 eller CAN1.Systembuss støtter da adresseområdet 0 ... 63.
Systembuss CAN støtter overføringsteknikken iht. ISO 11898. Nærmere informasjonom systembuss CAN finner du i håndboken "Seriell kommunikasjon", som du får hosSEW-EURODRIVE.
Koblingsskjema systembuss CAN 2
Kabelspesifikasjon • Bruk en 2 x 2-trådet revolvert og skjermet kobberkabel (dataoverføringskabel medskjerm av kobberflettverk). I henhold til IEC 60999 er klemming uten endehylsermulig. Kabelen må oppfylle følgende spesifikasjoner:– Ledertverrsnitt 0,2 ... 1,0 mm2 (AWG 24 ... AWG 18)– Ledningsmotstand 120 Ê ved 1 MHz– Kapasitetsbelegg  40 pF/m ved 1 kHzEgnet er f.eks. CAN-Bus- eller DeviceNet-kabel.
MERKNADER• Systembus CAN 2 er atskilt galvanisk. Bruk derfor helst grensesnitt CAN 2 (X32)
for tilkobling av feltapparater (f. eks. CANopen inn- og utganger). • Systembuss CAN 1 er ikke atskilt galvanisk. Bruk derfor helst grensesnitt CAN 1
(X33) for tilkobling av omformer over systembuss i koblingsskapet.• SEW-EURODRIVE anbefaler å tilkoble maks. 64 innganger og 64 utganger over
I/O-moduler på styringen MOVI-PLC® basic DHP11B.• For kommunikasjon mellom MOVIDRIVE® MDX61B og den innebygde styringen
MOVI-PLC® advanced er det ikke nødvendig med en systembuss-CAN-forbindelsehvis du bruker kanalen "DPRAM" (Æ systemhåndbok "MOVI-PLC®-programmeringi PLC-redigeringsprogrammet"). Men det forutsettes en systembuss-CAN-forbin-delse hvis det brukes komponenter fra bibliotekene MPLCMotion_MDX og MPLC-Processdata.
60526AXXFig. 4: Systembussforbindelse CAN 2 med drivomformer MOVIDRIVE® MDX60B/61B / MOVITRAC® B som eksempel
MDX61B
DGND
MDX60B/61B
X12
SC11 21
3SC12
DHE41B
X3
1X
32
X3
3
123
123
123
23
1
SC11
DGND
ON OFF
S12
X12:
2
1
SC12 3
ON OFF
S12
X45 X46
1 2 3 4 5 6HL ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHE41B
Ledningslengde • Tillatt total ledningslengde er avhengig av innstilt systembussoverføringshastighet:– 125 kbaud Æ 500 m– 250 kbaud Æ 250 m– 500 kbaud Æ 100 m– 1000 kbaud Æ 40 m
Endemotstand • På begynnelsen og enden av systembussforbindelsen CAN kobler du systembuss-avslutningsimpedans til (MOVIDRIVE® B, DIP S12 = ON; MOVITRAC® B, DIP S1 =ON). Ved alle andre apparater slår du av avslutningsimpedansen (MOVIDRIVE® B,DIP S12 = OFF; MOVITRAC® B, DIP S1 = OFF). Hvis styringen MOVI-PLC®
advanced DH.41B f.eks. er på enden av systembuss CAN 2, må du tilkoble enavslutningsimpedans på 120 Ê mellom Pin X32:2 og X32:3 (ved CAN 1: avslutnings-impedans Pin X33:2 og Pin X33:3).
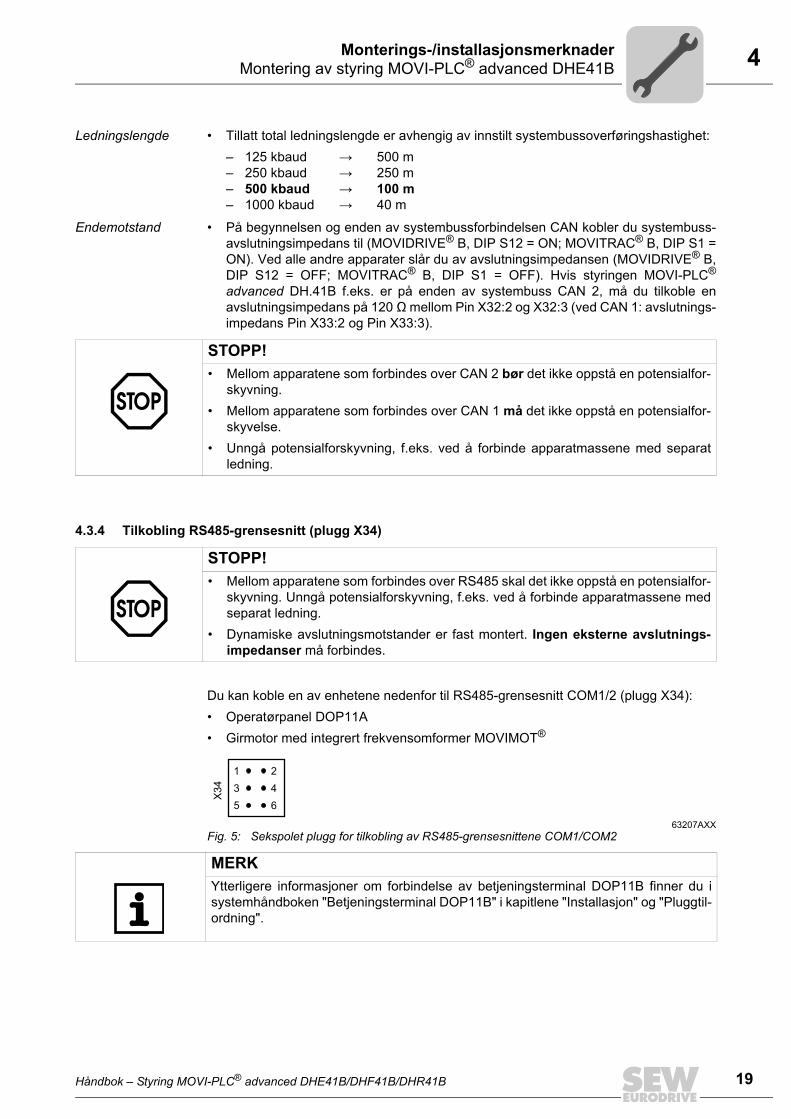
4.3.4 Tilkobling RS485-grensesnitt (plugg X34)
Du kan koble en av enhetene nedenfor til RS485-grensesnitt COM1/2 (plugg X34):• Operatørpanel DOP11A• Girmotor med integrert frekvensomformer MOVIMOT®
STOPP!• Mellom apparatene som forbindes over CAN 2 bør det ikke oppstå en potensialfor-
skyvning.• Mellom apparatene som forbindes over CAN 1 må det ikke oppstå en potensialfor-
skyvelse.• Unngå potensialforskyvning, f.eks. ved å forbinde apparatmassene med separat
ledning.
STOPP!• Mellom apparatene som forbindes over RS485 skal det ikke oppstå en potensialfor-
skyvning. Unngå potensialforskyvning, f.eks. ved å forbinde apparatmassene medseparat ledning.
• Dynamiske avslutningsmotstander er fast montert. Ingen eksterne avslutnings-impedanser må forbindes.
63207AXXFig. 5: Sekspolet plugg for tilkobling av RS485-grensesnittene COM1/COM2
X34
1
3
5
2
4
6
MERKYtterligere informasjoner om forbindelse av betjeningsterminal DOP11B finner du isystemhåndboken "Betjeningsterminal DOP11B" i kapitlene "Installasjon" og "Pluggtil-ordning".
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
19
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHE41B
20
4.3.5 Tilkobling systembuss Ethernet 1 (plugg X36)
Grensesnittet Ethernet 1 (plugg X36) er reservert som systembuss.
4.3.6 Tilkobling av Ethernet-2-grensesnitt (plugg X37)
Til Ethernet 2-grensesnittet (plugg X37) kan du koble en engineering-PC.
Over Ethernet 2-grensesnittet kan styringen MOVI-PLC® advanced DHE41B ogsåutveksle data med en annen styring over UDP/TCP.
61522AXXFig. 6: Eksempel: Tilkobling av en engineering-PC over Ethernet-2-grensesnitt til X37
PC COM
X35
X36
X37
2
4
6
1
3
5
X3
4
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X3
2X
33
2
4
6
1
3
58
10
12
7
9
11
X3
1
T1S1
L1L2
L3L5
XML6
L7L8
L9L4
L10
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHE41B
4.3.7 Driftsindikatorer for styring MOVI-PLC® advanced DHE41B
Styring MOVI-PLC® advanced DHE41B har ti lysdioder (L1 … L10) som viser aktuellstatus for styringen MOVI-PLC® advanced DHE41B med tilhørende grensesnitt.
LED L1 (CAN-1-status)
Lysdioden L1 signaliserer statusen til systembuss CAN 1.
LED L2 (CAN-2-status)
Lysdioden L2 signaliserer statusen til systembuss CAN 2.
LED L3 (IEC-programstatus)
Lysdioden L3 signaliserer statusen til styreprogrammet IEC 61131.
Statuser for LED L1 Diagnostikk Utbedring av feil
Oransje Systembuss CAN 1 initialiseres.
-
Grønn Systembuss CAN 1 er initialisert.
Blinker grønt(0,5 Hz)
Systembuss CAN 1 er i SCOM-Suspend.
Blinker grønt(1 Hz)
Systembuss CAN 1 er i SCOM-On.
Rød Systembuss CAN 1 er ute av drift (BUS-OFF).
1. Kontroller og korriger kabelleggingen til systembuss CAN 1.
2. Kontroller og korriger innstilt baud-rate til systembuss CAN 1.
3. Kontroller og korriger avslutnings-impedansene til systembuss CAN 1.
Blinker rødt(1 Hz)
Advarsel på systembuss CAN 1. 1. Kontroller og korriger kabelleggingen til systembuss CAN 1.
2. Kontroller og korriger innstilt overfø-ringshastighet til systembuss CAN 1.
Status for LED L2 Diagnostikk Utbedring av feil
Oransje Systembuss CAN 2 initialiseres. -
Grønn Systembuss CAN 2 er initialisert. -
Blinker grønt(0,5 Hz)
Systembuss CAN 2 er i SCOM-Suspend.
-
Blinker grønt(1 Hz)
Systembuss CAN 2 er i SCOM-On. -
Rød Systembuss CAN 2 er ute av drift (BUS-OFF).
1. Kontroller og korriger kabelleggingen til systembuss CAN 2.
2. Kontroller og korriger innstilt overfø-ringshastighet til systembuss CAN 2.
3. Kontroller og korriger avslutnings-impedansene til systembuss CAN 2.
Blinker rødt(1 Hz)
Advarsel på systembuss CAN 2. 1. Kontroller og korriger kabelleggingen til systembuss CAN 2.
2. Kontroller og korriger innstilt overfø-ringshastighet til systembuss CAN 2.
Status for L3 Diagnostikk Utbedring av feil
Grønn IEC-programmet kjører -
Av Ingen program ladet. Du må lade et program i styringen.
Blinker oransje (1 Hz)
Programforløpet er stoppet. Bootloader-oppdatering nødvendig (se kapitlet "SD-minnekort type OMH41B-T.")
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
21
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHE41B
22
LED L4 (PLC-status)
Lysdiode L4 signaliserer statusen til firmwaren til styringen MOVI-PLC® advancedDHE41B.
LED L5 (user) LED L5 er fritt programmerbar i IEC-programmet.
LED L6, L7, L8, L9 (DIO n/m)
LED L6, L7, L8, L9 signaliserer statusen til binærinngangene og binærutgangene(X31:3 - X31:10) n eller m (f.eks. DIO2/3).
LED L10 (24V / I/O OK)
LED L10 signaliserer statusen til spenningsforsyningen for binærinngangene ogbinærutgangene.
Statuser for LED L4 Diagnostikk Utbedring av feil
Blinker grønt(1 Hz)
Firmware til styringen MOVI-PLC® advanced DHE41B går riktig.
-Rød • SD-kort ikke satt inn.
• Filsystemet til SD-kortet er korrupt
Blinker oransje (1 Hz)
Programforløpet er stoppet. Bootloader-oppdatering nødvendig (se kapitlet "SD-minnekort type OMH41B-T.")
63437AXX
Statusen til lysdio-dene L6, L7, L8, L9
Diagnostikk Utbedring av feil
AV Ingen spenning.
-Grønn Spenning på LED n.
Rød Spenning på LED m.
Oransje Spenning på LED n og m.
X31
1
3
5
7
9
2
4
6
8
10L6
L7
L8
L9
n m
Status til lysdiode L10 Diagnostikk Utbedring av feil
Grønn Spenningsforsyningen til de binære inn- og utgangene er OK.
-
AV Ingen spenningsforsyning til binær-inngangene og binærutgangene.
1. Slå av omformeren hvor styringen MOVI-PLC® advanced DHE41B er installert.
2. Kontroller og korriger kabelleg-gingen til de binære inn- og utgan-gene iht. elektrokoblingsskjemaet.
3. Kontroller strømopptaket til de tilko-blede aktuatorene (maks. strøm Æ kap. 8).
4. Slå på omformeren hvor styringen MOVI-PLC® advanced DHE41B er installert.
Oransje Spenningsforsyningen til de binære inn- og utgangene er tilkoblet. Men en av følgende feil har oppstått:• Overbelastning på en eller flere
binære inn- eller utganger• Overtemperatur på utgangs-
drivenheten• Kortslutning på minst en binær
inn- eller utgang
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHE41B
4.3.8 DIP S1 default IP-adresse
Med DIP S1 kan du stille inn en fast innstilt IP-adresse for Ethernet 2-tilkoblingen.Den innstilte IP-adressen brukes ved neste booting.
4.3.9 SD-minnekort type OMH41B-T.
SD-minnekortet er nødvendig når styringen MOVI-PLC® advanced DH.41B skal brukesog inneholder firmwaren, IEC-programmet og brukerdata (for eksempel resepter).Sammen med en MOVIAXIS®-mastermodul brukes den til å sikkerhetskopiere data ogforeta automatisk parametrisering ved utskiftninger.SD-minnekortet OMH41B-T. plugges i opsjonen DH.41B. Hvis en kompaktstyring, enMOVIAXIS®-mastermodul eller en omformer med montert opsjon DH.41B leveres sam-tidig, er SD-minnekortet allerede integrert i opsjon DH.41B.SD-minnekortet 11 finnes i ulike utførelser (T0 ... T10). De ulike variantene gir mulighetfor ulike teknologifunksjoner. Teknologitrinnet kan endres ved at man skifter SD-minne-kortet.
Utførelser
Bootloader-oppdatering
Hvis lysdiodene L3 og L4 blinker oransje i 1 Hz-takt etter innkobling, må det foretas enbootloader-oppdatering. Slik går du frem:• Koble ikke ut spenningsforsyningen under prosessen.• Trykk resetknappen T1 på forsiden av opsjon DH.41B i tre sekunder. Når bootloader-
oppdateringen starter, blinker kun lysdiode 4.• Bootloader-oppdatering er utført når lysdiode L4 blinker grønt.
S1-stilling Forklaring
Oppe Fast innstilt IP-adresse 192.168.10.4
Nede Adresser innført i konfigurasjonsfilen (se kap. 4.3.1)
SD-minnekort OMH41B-T.
Teknologi-nivå T0-T10
Delenummer Beskrivelse
T0 1821 204 2 • Administrering av turtallsregulering• Posisjonering, f.eks. med biblioteket MPLCMotion_MDX
T1 1821 205 0 Ekstra teknologifunksjoner til utførelse T0:• Kamskive• Elektronisk gir• Kambrytermekanisme
T2 1821 206 9 Ekstra teknologifunksjoner til utførelse T1:• Applikasjonsmoduler for eksempel håndtering, SyncCrane
T3 1821 967 5
Nødvendig for baneinterpollasjon. Teknologinivået er avhengig av funksjonene som kreves og antall beregnede kinematikker.
T4 1821 968 3
T5 1821 969 1
T6 1821 970 5
T7 1821 971 3
T8 1821 972 1
T9 1821 974 8
T10 1821 975 6
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
23
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHF41B
24
4.4 Montering av styring MOVI-PLC® advanced DHF41B4.4.1 Funksjonsbeskrivelse av klemmene, DIP og LED
MERKTilkoblingene som er identiske for DHE41B er beskrevet i kapitlet "Installasjon avstyring MOVI-PLC® advanced DHE41B".
FrontvisningStyring MOVI-PLC® advanced DHF41B
BetegnelseLEDDIPKlemme
Funksjon
63209AXX
LED LED 1LED 2LED 3LED 4LED 5LED 6LED 7LED 8LED 9LED 10LED 11LED 12LED 13LED 14LED 15LED 16LED 17LED 18
CAN-1-statusCAN-2-statusIEC-progr.-statusPLC-statusUser LEDDIO6/7DIO4/5DIO2/3DIO0/124 V / I/O OK--BUSOFFBit-Strobe I/OPolled I/OMod/NetFault ProfibusRun Profibus
Status systembuss CAN 1Status systembuss CAN 2Status styringsprogramStatus styrings-firmwareFritt programmerbarStatus inn- eller utgang DIO6/7Status inn- eller utgang DIO4/5Status inn- eller utgang DIO2/3Status inn- eller utgang DIO0/1Status spenningsforsyning I/OReservertReservertDe tofargede lysdiodene 13 ... Lysdiode 16 viser aktuell status for feltbussgrensesnittet og DeviceNet-systemet
Status PROFIBUS-busselektronikkStatus PROFIBUS-kommunikasjon
Plugg X30P:PROFIBUS(Sub-D9)
X30P:9X30P:8X30P:7X30P:6X30P:5X30P:4X30P:3X30P:2X30P:1
GND (M5V)RxD/TxD-NN.C.VP (P5V/100 mA)GND (M5V)CNTR-PRxD/TxD-PN.C.N.C.
Referansepotensial PROFIBUSSignal Receive Transmit NegativeKlemme er ikke opptattDC+5 V-potensial for bussavslutningReferansepotensial PROFIBUSPROFIBUS-styringssignal for repeaterSignal Receive Transmit PositiveKlemme er ikke opptattKlemme er ikke opptatt
Plugg X30D:DeviceNet(klemmer som kan plugges inn)
X30D:1X30D:2X30D:3X30D:4X30D:5
V–CAN_LDRAINCAN_HV+
0V24CAN_LDRAINCAN_H24 V
DIP S2Omkobling PROFIBUS/ DeviceNet
S2 OppeNede
Feltbussgrensesnitt PROFIBUS (X30P) aktivFeltbussgrensesnitt DeviceNet (X30D) aktiv
DHF41B
2222
0123
222
456
27
2
4
6
1
2
3
X3
4X
35
X36
X37
XM
1
3
5
1
2
3
1
2
3
1
2
3
1
2
3
X3
2X
33
2
4
6
1
3
58
10
7
9
X3
1
X38
L18
X30P
S1
3
4
2
1
1
5
X3
0D
S2
L16
L15
L14
L13
L12
L11
L10
L9
L8
L7
T1
L6
L5
L4
L3
L2
L1
L17
ON
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHF41B
Ved PROFIBUS-drift: DIP for innstilling av PROFIBUS-Stasjonsadresse
Ved drift over DeviceNet: DIP for innstilling av MAC-ID og for innstil-ling av overføringshas-tighet
20
21
22
23
24
25
26
20
21
22
23
24
25
26
27
Verdi: 1Verdi: 2Verdi: 4Verdi: 8Verdi: 16Verdi: 32Verdi: 64
Med DIP-ene 20 ... 25 stilles MAC-ID (Media Access Control Identifier) inn. MAC-ID-en utgjør nodeadressen (adresseområde 0 ... 63)
Innstilling av overføringshastighetInnstilling av overføringshastighet
Plugg X38:SafetyBus(klemmer som kan plugges inn)
X38:1X38:2X38:3
ReservertReservertReservert
Plugg X31:Binære inn- og utganger(klemmer som kan plugges inn, farge: BK)
X31:1X31:2X31:3X31:4X31:5X31:6X31:7X31:8X31:9X31:10
+24 V-inngangBZG24VDIO 0DIO 1DIO 2DIO 3DIO 4DIO 5DIO 6DIO 7
Spenningsinngang DC+24 VReferansepotensial for binærsignalerBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgang
Plugg X34:RS485-grensesnitt COM1, COM2(klemmer som kan plugges inn, farge: BK)
X34:1X34:2X34:3X34:4X34:5X34:6
RS+RS+ isolertRS–RS– isolertDGNDGND isolert
Signal RS485+ (COM 1)Signal RS485+ isolert (COM 2)Signal RS485– (COM 1)Signal RS485– isolert (COM 2)Referansepotensial (COM 1)Referansepotensial (COM 2)
Plugg X35:USB-tilkobling (under forberedelse)
X35:1X35:2X35:3X35:4
USB+5 VUSB–USB+DGND
Spenningsforsyning DC 5 VSignal USB–Signal USB+Referansepotensial
Plugg X36:Tilkobling Ethernet 1 Systembuss (RJ45-bøssing)
X36
Standard Ethernet-termineringPlugg X37:Tilkobling Ethernet 2(RJ45-bøssing)
X37
Plugg X32:Systembuss CAN 2(galvanisk adskilt)(klemmer som kan plugges inn, farge: YE/BK)
X32:1X32:2X32:3
BZG_CAN 2CAN 2HCAN 2L
Referansepotensial systembuss CAN 2Systembuss CAN 2 HighSystembuss CAN 2 Low
Plugg X33:Systembuss CAN 1(klemmer som kan plugges inn, farge: YE/BK)
X33:1X33:2X33:3
DGNDCAN 1HCAN 1L
Referansepotensial systembuss CAN 1Systembuss CAN 1 HighSystembuss CAN 1 Low
DIP S1 S1 OppeNede
Standard IP-adresseEthernet 2-tilkobling
Resetknapp T1 T1 Reset
FrontvisningStyring MOVI-PLC® advanced DHF41B
BetegnelseLEDDIPKlemme
Funksjon
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
25
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHF41B
26
4.4.2 Tilkobling PROFIBUS (plugg X30P)
Tilkoblingen med PROFIBUS-systemet utføres med en 9-polet Sub-D-plugg iht. IEC61158. T-Bus-forbindelsen må realiseres med tilsvarende utført plugg. Følgende bildeviser PROFIBUS-pluggen som tilkobles med X30P til styringen MOVI-PLC® advancedDHF41B.
Forbindelse MOVI-PLC®/ PROFIBUS
Forbindelsen av styringen MOVI-PLC® advanced DHF41B med PROFIBUS-systemetutføres vanligvis over en snodd, skjermet totrådet ledning. Vær oppmerksom på mak-simal overføringshastighet ved valg av bussplugg.Den totrådede ledningen kobles til PROFIBUS-pluggen over Pin 3 (RxD/TxD-P) ogPin 8 (RxD/TxD-N). Kommunikasjonen skjer over disse to kontaktene. RS485-signa-lene RxD/TxD-P og RxD/TxD-N må kontaktes likt hos alle PROFIBUS-deltagere. Hvisikke kan busskomponentene ikke kommunisere over bussmediet.
Pin 4 (CNTR-P) til PROFIBUS-grensesnittet gir et TTL-styresignal for en repeater elleren FO-adapter (referanse = Pin 9).
Overføringshastigheter høyere enn 1,5 Mbaud
Drift av styringen MOVI-PLC® advanced DHF41B med overføringshastigheter> 1,5 Mbaud er kun mulig med spesielle 12 Mbaud-PROFIBUS-plugger.
Bussavslutning For enkel igangsetting av PROFIBUS-systemet, og forminsking av feilkildene ved instal-lasjonen, må ikke styringen MOVI-PLC® advanced DHF41B utrustes med bussavslut-ningsimpendanser.Hvis styringen MOVI-PLC® advanced DHF41B er på begynnelsen eller slutten av etPROFIBUS-segment, og hvis kun en PROFIBUS-kabel fører til styringen MOVI-PLC®
advanced DHF41B, må du bruke en plugg med integrert bussavslutningsimpedans.Slå på busavslutningsimpedansene ved denne PROFIBUS-pluggen.
61766AXXFig. 7: Belegging av den 9-polede Sub-D-pluggen iht. IEC 61158
[1] 9-polet Sub-D-plugg[2] Signalledning, revolvert[3] Ledende, flat forbindelse mellom pluggkapsel og avskjerming.
RxD/TxD-P 3
1
59
6 8
4
5
6
9
VP (P5V/100mA)
DGND (M5V)
DGND (M5V)
CNTR-P
RxD/TxD-N
[3]
[1]
[2]
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHF41B
Stille inn stasjonsadresse
PROFIBUS-stasjonsadressen stiller du inn med DIP-ene 20... 26 på styringen MOVI-PLC® advanced DHF41B. Styringen MOVI-PLC® advanced DHF41B støtter adresseområde 0...125.
En endring av PROFIBUS-stasjonsadressen under drift er ikke øyeblikkelig virksom,men først etter ny start av kompaktstyringen eller omformeren hvor styringenMOVI-PLC® advanced DHF41B er installert (nett + 24 V på/av).
4.4.3 Tilkobling DeviceNet (plugg X30D)
Tilkobling til feltbussystemet DeviceNet er under forberedelse.
Kontakt-terminering
Terminering av tilkoblingsklemmene beskrives i DeviceNet-spesifikasjon (bind I, tillegg A).
Opsjonskortet DHF41B er optisk frakoblet på driversiden i samsvar med DeviceNet-spe-sifikasjonen (bind I, kapittl 9). Det betyr at CAN-Bus-driveren må forsynes med 24-V-spenning over busskabelen. Kabelen som skal brukes, er også beskrevet i DeviceNet-spesifikasjonen (bind I, tillegg B). Tilkoblingen må utføres med den fargekode som erangitt i tabellen nedenfor.
63210AXX
Som standard er stasjonsadresse 4 stilt inn:20 Æ verdi: 1 × 0 = 021 Æ verdi: 2 × 0 = 022 Æ verdi: 4 × 1 = 423 Æ verdi: 8 × 0 = 024 Æ verdi: 16 × 0 = 025 Æ verdi: 32 × 0 = 026 Æ verdi: 64 × 0 = 0
DHF41B
2222
0123
222
456
27
ON
61612AXX
Pinnenr. Signal Forklaring Ledningsfarge
1 V– 0V24 BK
2 CAN_L CAN_L BU
3 DRAIN DRAIN blank
4 CAN_H CAN_H WH
5 V+ 24 V RD
DFD11B
1
2
3
4
5
DHF41B
X30D
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
27
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHF41B
28
Stille inn stasjonsadresse
Du stiller inn DeviceNet-stasjonsadressen med DIP-ene 20... 25 på styringen MOVI-PLC® advanced DHF41B. Styringen MOVI-PLC® advanced DHF41B støtter adresseområde 0...63.
En endring av deviceNet-stasjonsadressen under drift er ikke øyeblikkelig virksom, menførst etter ny start av kompaktstyringen eller omformeren hvor styringen MOVI-PLC®
advanced DHF41B er installert (nett + 24 V på/av).
Innstilling av overførings-hastighet
Overføringshastigheten stilles inn med DIP-ene 26 og 27.
4.4.4 Tilkobling SafetyBus (plugg X38)
Tilkobling til bussystemet SafetyBus er under forberedelse.
63210AXX
Som standard er stasjonsadresse 4 stilt inn:20 Æ verdi: 1 × 0 = 021 Æ verdi: 2 × 0 = 022 Æ verdi: 4 × 1 = 423 Æ verdi: 8 × 0 = 024 Æ verdi: 16 × 0 = 025 Æ verdi: 32 × 0 = 0
DHF41B
2222
0123
222
456
27
ON
DIPOverføringshastighet
26 27
0 0 125 kbaud
1 0 250 kbaud
0 1 500 kbaud
1 1 Ugyldig
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHF41B
4.4.5 Driftsindikatorer for styring MOVI-PLC® advanced DHF41B
LED 11, 12 LED 11 og 12 er reservert.
LED L13 (BUS-OFF)
LED L13 (BUS-OFF) viser fysikalsk status for bussknuten.
LED L14 (BIO) LED L14 (Bit-Strobe I/O) kontrollerer Bit-Strobe I/O-forbindelsen.
MERK
Lysdiodene som er identiske for DHE41B er beskrevet i kapitlet "Driftsindikatorer for styring MOVI-PLC® advanced DHE41B".
Status til lysdiode L13
Status Forklaring
AV NO ERROR Antallet bussfeil beveger seg innenfor normalt område (Error-Active-State).
Blinker rødt(125 ms-takt)
BUS WARNING
Enheten utfører DUP-MAC-Check og kan ikke sende meldinger, fordi det ikke er tilkoblet andre deltakere på bussen (Error-Passiv-State).
Blinker rødt(1 s-takt)
For høyt antall fysiske bussfeil. Det skrives ikke flere feilmeldinger aktivt på bussen (Error-Passiv-State).
Lyser rødt BUS ERROR • BusOff-State• Antallet fysikalske bussfeil har økt på tross av omkob-
ling til Error-Passive-State. Tilgangen til bussen deak-tiveres.
Lyser gult POWER OFF Ekstern spenningsforsyning er koblet ut eller ikke koblet til.
Status til LED L14
Status Forklaring
Blinker grønt(125 ms-takt)
DUP-MAC-Check Enheten utfører en DUP-MAC-Check
AV Ikke innkoblet/OffLine men ikke DUP-MAC-Check
• Enheten er i OffLine-status• Enheten er koblet ut
Blinker grønt(1 s-takt)
OnLine og i operasjons-modus
• Enheten er OnLine• DUP-MAC-Check ble vellykket utført• Det opprettes en BIO-forbindelse til en master
(Configuring State)• Manglende, feil eller ikke komplett konfigurasjon
Lyser grønt OnLine, Operational Mode og Connected
• OnLine• Det er opprettet en BIO-forbindelse (Established
State)
Blinker rødt(1 s-takt)
Minor Fault eller Connection Timeout
• Det er stilt inn et ugyldig antall prosessdata med DIP-ene
• Det har oppstått en feil som kan utbedres• Bit-Strobe I/O-Connection er i Timeout State
Lyser rødt Critical Fault eller Critical Link Failure
• Det har oppstått en feil som ikke kan utbedres• BusOff• DUP-MAC-Check har oppdaget en feil
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
29
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHF41B
30
LED L15 (PIO) LED L15 (Polled I/O) kontrollerer Polled I/O-forbindelsen.
LED L16 (Mod/Net)
Funksjonaliteten til LED L16 (Mod/Net = Module/Network Status) som er beskrevet itabellen nedenfor, er fastsatt i DeviceNet-spesifikasjonen.
Status til LED L15
Status Forklaring
Blinker grønt(125 ms-takt)
DUP-MAC-Check Enheten utfører en DUP-MAC-Check
AV Ikke innkoblet/OffLine men ikke DUP-MAC-Check
• Enheten er i OffLine-status• Enheten er koblet ut
Blinker grønt(1 s-takt)
OnLine og i operasjons-modus
• Enheten er OnLine• DUP-MAC-Check utført• Det opprettes en Polled I/O-forbindelse til en master
(Configuring State)• Manglende, feil eller ikke komplett konfigurasjon
Lyser grønt OnLine, Operational Mode og Connected
• OnLine• Det er opprettet en Polled I/O-forbindelse (Established
State)
Blinker rødt(1 s-takt)
Minor Fault eller Connection Timeout
• Ugyldig overføringshastighet stilt inn med DIP-ene• Det har oppstått en feil som kan utbedres• Polled I/O-forbindelse er i timeout-status
Lyser rødt Critical Fault eller Critical Link Failure
• Det har oppstått en feil som ikke kan utbedres• BusOff• DUP-MAC-Check har oppdaget en feil
Status til LED L16
Status Forklaring
AV Ikke innkoblet/OffLine • Enheten er i OffLine-status• Enheten utfører en DUP-MAC-Check• Enheten er koblet ut
Blinker grønt(1 s-takt)
OnLine og i operasjons-modus
• Enheten er OnLine, og det er ikke opprettet noen forbindelse
• DUP-MAC-Check ble vellykket utført• Det er ikke etablert forbindelse til master enda• Manglende, feil eller ikke komplett konfigurasjon
Lyser grønt OnLine, Operational Mode og Connected
• OnLine• OnLine-forbindelse til master ble etablert• Forbindelsen er aktiv (Established State)
Blinker rødt(1 s-takt)
Minor Fault eller Connection Timeout
• Det har oppstått en feil som kan utbedres• Polled I/O eller/og bit-strobe I/O-forbindelsen er
i timeout-status• DUP-MAC-check har oppdaget en feil
Lyser rødt Critical Fault eller Critical Link Failure
• Det har oppstått en feil som kan utbedres• BusOff• DUP-MAC-Check har oppdaget en feil
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHF41B
LED L17 (Fault Profibus)
LED L17 (Fault Profibus) signaliserer at kommunikasjonen via PROFIBUS-grense-snittet er forskriftsmessig.
LED L18 (Run Profibus)
LED L18 (Run Profibus) signaliserer at driften av PROFIBUS-elektronikken (maskin-vare) er korrekt.
Status til LED L17
Diagnostikk Utbedring av feil
AV • Syringen MOVI-PLC® advanced DHF41B utveksler data med PROFIBUS-DP-Master (tilstand Data-Exchange).
-
Rød • Forbindelse til DP-Master er falt bort.• Styringen MOVI-PLC® advanced DHF41B
gjenkjenner ikke PROFIBUS-overførings-hastigheten.
• Det har oppstått et bussavbrudd.• PROFIBUS-DP-Master er ute av drift.
• Kontroller PROFIBUS-tilkoblingen til apparatet.
• Kontroller prosjekteringen i PROFIBUS-DP-Master.
• Kontroller alle kabler i PROFIBUS-nettet.
Blinker rødt (1 Hz)
• Styringen MOVI-PLC® advanced DHF41B gjenkjenner overføringshastigheten. DP-masteren aktiverer likevel ikke styringen MOVI-PLC® advanced DHF41B.
• Styringen MOVI-PLC® advanced DHF41B ble ikke prosjektert eller feilprosjektert i DP-master.
• Kontroller og korriger innstilt PROFIBUS-stasjonsadresse på styringen MOVI-PLC® advanced DHF41B og i prosjekteringsprogram-varen til DP-Master.
• Kontroller og korriger prosjekte-ringen til DP-Master.
• Bruk GSD-filen SEW_6007.GSD med betegnelsen MOVI-PLC for prosjekteringen.
Status til LED L18
Diagnostikk Utbedring av feil
Grønn • PROFIBUS-maskinvare er OK. -
Blinker grønn(1 Hz)
• PROFIBUS-stasjonsadressen på DIP-ene er stilt inn høyere enn 125. Hvis PROFIBUS-stasjonsadresse er stilt inn større enn 125, bruker styring MOVI-PLC® advanced DHF41B PROFIBUS-stasjonsadresse 4.
1. Kontroller og korriger innstilt PRO-FIBUS-stasjonsadresse på DIP-ene.
2. Slå på alle drivomformere på nytt. Endre PROFIBUS-adresse blir først overtatt etter ny start.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
31
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
32
4.5 Montering av styring MOVI-PLC® advanced DHR41B4.5.1 Funksjonsbeskrivelse av klemmene, DIP og LED
MERKTilkoblingene som er identiske for DHE41B og DHF41B er beskrevet i kapitlene "Instal-lasjon av styring MOVI-PLC® advanced DHE41B/DHF41B".
FrontvisningStyring MOVI-PLC® advanced DHR41B
BetegnelseLEDDIPKlemme
Funksjon
63362AXX
LED LED 1LED 2LED 3LED 4LED 5LED 6LED 7LED 8LED 9LED 10LED 11LED 12LED 13LED 14
CAN-1-statusCAN-2-statusIEC-progr.-statusPLC-statusUser LEDDIO6/7DIO4/5DIO2/3DIO0/124V / I/O OK--
Status systembuss CAN 1Status systembuss CAN 2Status styringsprogramStatus styrings-firmwareFritt programmerbarStatus inn- eller utgang DIO6/7Status inn- eller utgang DIO4/5Status inn- eller utgang DIO2/3Status inn- eller utgang DIO0/1Status spenningsforsyning I/OReservertReservertBusstatusBusstatus
Plugg X30-1:Ethernet 3(RJ45-bøssing)
X30-1
Standard Ethernet-termineringPlugg X30-2:Ethernet 4(RJ45-bøssing)
X30-2
DIP 20, 21 20
21
ONOFF
ONOFF
Standard IP-adresse (192.168.10.4)Lagret IP-adresse / DHCP
EtherNet/IP / Modbus TCP/IPPROFINET
Plugg X38:SafetyBus(klemmer som kan plugges inn)
X38:1X38:2X38:3
ReservertReservertReservert
Plugg X31:Binære inn- og utganger(klemmer som kan plugges inn, farge: BK)
X31:1X31:2X31:3X31:4X31:5X31:6X31:7X31:8X31:9X31:10
+24 V-inngangBZG24VDIO 0DIO 1DIO 2DIO 3DIO 4DIO 5DIO 6DIO 7
Spenningsinngang DC+24 VReferansepotensial for binærsignalerBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgangBinær inn- eller utgang
Plugg X34:RS485-grensesnitt COM1, COM2(klemmer som kan plugges inn, farge: BK)
X34:1X34:2X34:3X34:4X34:5X34:6
RS+RS+ isolertRS–RS– isolertDGNDGND isolert
Signal RS485+ (COM 1)Signal RS485+ isolert (COM 2)Signal RS485– (COM 1)Signal RS485– isolert (COM 2)Referansepotensial (COM 1)Referansepotensial (COM 2)
Plugg X35:USB-tilkobling (under forberedelse)
X35:1X35:2X35:3X35:4
USB+5 VUSB–USB+DGND
Spenningsforsyning DC 5 VSignal USB–Signal USB+Referansepotensial
DHR41B
22
01
2
4
6
X3
4X
35
X36
X30-1
X30-2
X37
XM
1
3
5
1
2
3
1
2
3
1
2
3
1
2
3
X3
2X
33
2
4
6
1
3
58
10
7
9
X3
1
S1
3
4
2
1
L14
L13
L10
L9
L8
L7
T1
L6
L5
L4
L3
L2
L1
ON
1
2
3
X38
L12
L11
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
Plugg X36:Tilkobling Ethernet 1 Systembuss (RJ45-bøssing)
X36
Standard Ethernet-termineringPlugg X37:Tilkobling Ethernet 2(RJ45-bøssing)
X37
Plugg X32:Systembuss CAN 2(galvanisk atskilt)(klemmer som kan plugges inn, farge: YE/BK)
X32:1X32:2X32:3
BZG_CAN 2CAN 2HCAN 2L
Referansepotensial systembuss CAN 2Systembuss CAN 2 HighSystembuss CAN 2 Low
Plugg X33:Systembuss CAN 1(klemmer som kan plugges inn, farge: YE/BK)
X33:1X33:2X33:3
DGNDCAN 1HCAN 1L
Referansepotensial systembuss CAN 1Systembuss CAN 1 HighSystembuss CAN 1 Low
DIP S1 S1 OppeNede
Standard IP-adresseEthernet 2-tilkobling
Resetknapp T1 T1 Reset
FrontvisningStyring MOVI-PLC® advanced DHR41B
BetegnelseLEDDIPKlemme
Funksjon
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
33
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
34
4.5.2 Kontaktterminering
Bruk prefabrikkerte, skjermede RJ45-stikkforbindere i henhold til IEC 11801 utgave 2.0,kategori 5.
Forbindelse MOVIDRIVE® / MOVITRAC® B / Ethernet
For å koble DHR41B til Ethernet-nettverket forbinder du et av Ethernet-grensesnitteneX30-1 eller X30-2 (RJ45-kontakt) med en skjermet twisted pair-ledning i henhold til kate-gori 5, klasse D etter IEC 11801 utgave 2.0, med de andre nettverksdeltakerne. Denintegrerte switchen hjelper deg til å opprette en linjetopologi og har autocrossing-funk-sjoner.
54174AXXFig. 8: Kontaktterminering RJ45-hurtigkontakt
A = visning fra forsidenB = visning fra baksiden[1] Pin 1 TX+ Transmit Plus[2] Pin 2 TX– Transmit Minus[3] Pin 3 RX+ Receive Plus[6] Pin 6 RX– Receive Minus
[3] [2] [1]23
6
1
[6]
A B
MERKNADER• I henhold til IEC 802.3 er maksimal ledningslengde for 10/100 MBaud Ethernet
(10BaseT / 100BaseT), for eksempel mellom to nettverksdeltakere 100 m.• For å minimere belastningen på sluttutstyret som følge av uønsket Multicast-data-
utveksling, anbefaler vi å ikke koble sluttutstyr direkte til opsjon DHR41B. Kobleutstyr fra andre produsenter til via en nettverkskomponent som støtter IGMP Snoo-ping-funksjonen (f.eks. Managed Switch).
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
4.5.3 Avskjerm og forlegg buskabelen
Bruk bare skjermede kabler og forbindelseselementer som oppfyller kravene i henholdtil kategori 5, klasse D, i henhold til IEC 11801 utgave 2.0.En fagmessig skjerming av busskabelen demper de elektriske spredningene som kanforekomme i industriområder. Med følgende forholdsregler oppnår du de beste avskjer-mingsegenskapene:• Trekk festeskruene til plugger, moduler og potensialutligningsledninger til for hånd.• Bruk kun kontakter med metallhus eller metallisert hus.• Avskjermingen i pluggen må tilkobles over en stor flate.• Legg avskjermingen til bussledningen på begge sider.• Signal- og busskabelen må ikke forlegges parallelt med effektkabler (motorled-
ninger), men helst i adskilte kabelkanaler.• Bruk metalliske, jordede kabelbrisker i industrielle omgivelser.• Før signalkabelen og tilhørende potensialutligning til hverandre med liten avstand og
ad korteste vei.• Unngå forlengelse av bussledninger over pluggforbinder.• Legg bussledningene langs og nær eksisterende godsflater.
4.5.4 Innstilling av DIP 20 og 21
DIP 20 I bryterstilling "20" = "1" (= ON) settes følgende standard IP-adresseparametre nårDC 24 V-hjelpespenningen slås på:• IP-adresse: 192.168.10.4• Subnettmaske: 255.255.255.0• Standard gateway: 1.0.0.0 ved EtherNet/IP (192.168.10.4 ved PROFINET)• P785 DHCP / Startup Configuration: Lagrede IP-parametere (DHCP er deaktivert)
DIP 21 Med DIP "21" stilles den aktuelle feltbussprotokollen inn.• 21 = "1" (= ON) Feltbussprotokollen EtherNet/IP / Modbus TCP/IP er aktiv• 21 = "0" (= OFF) Feltbussprotokollen PROFINET er aktiv.
STOPP!Ved jordpotensialsvingninger kan det flyte utjevningsstrøm via skjermen som er koblettil på begge sider og som er forbundet med jordpotensialet (PE). Sørg i slike tilfeller fortilstrekkelig potensialutjevning i henhold til relevante VDE-bestemmelser.
MERKInnstillingen av DIP "20" overtas kun ved en Power-On-Reset (nett- og DC 24 V-hjel-pespenningen slås av og deretter på igjen).
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
35
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
36
4.5.5 TCP / IP-adressering og subnettInnledning Adresseinnstillingene for IP-protokollen foretas via følgende parametere:
• MAC-adresse• IP-adresse• Subnettmaske• Standard gatewayFor at innstillingen av parameterene skal bli korrekt, følger i dette kapitlet en forklaringav adresseringsmekanismene og inndelingen av IP-nettverk i subnett.
MAC-adresse MAC-adressen danner grunnlaget for alle adresseinnstillinger (Media Access Con-troller). MAC-adressen til en Ethernet-enhet er en 6 Byte-verdi (48 bit) som tilordnes kunen gang over hele verden. SEW-Ethernet-enheter har MAC-adressen 00-0F-69-xx-xx-xx. For større nettverk er MAC-adressen vanskelig å håndtere. Derfor bruker manIP-adresser som kan tilordnes fritt.
IP-adresse IP-adressen er en 32-bitverdi som identifiserer en stasjon i nettverket på en entydigmåte. En IP-adresse fremstilles med fire desimaltall som er adskilt med punktum.Eksempel: 192.168.10.4Hvert desimaltall står for én Byte (= 8 bit) i adressen og kan også fremstilles binært(se tabellen under).
IP-adressen består av en nettverksadresse og en stasjonsadresse (se tabellen under).
Hvilken del av IP-adressen som identifiserer nettverket og hvilken del som identifisererstasjonen, fastsettes av nettverksklassen og subnettmasken.Stasjonsadresser som bare består av nuller og ettall (binær), står for selve nettverketeller for en broadcastadresse og er derfor ikke tillatt.
Nettverksklasser Første Byte i IP-adressen fastsetter nettverksklassen og dermed oppdelingen inettverksklasse og stasjonsadresse.
For mange nettverk er denne grovinndelingen ikke tilstrekkelig. De bruker i tillegg ensubnettmaske som kan stilles inn eksplisitt.
Byte 1 Byte 2 Byte 3 Byte 4
11000000 . 10101000 . 00001010 . 00000100
Nettverksadresse Stasjonsadresse
192.168.10 4
VerdiområdeNettverksklasse Fullstendig nettverksadresse
(eksempel) ForklaringByte 1
0 ... 127 A 10.1.22.3 10 = nettverksadresse1.22.3 = stasjonsadresse
128 ... 191 B 172.16.52.4 172.16 = nettverksadresse52.4 = stasjonsadresse
192 ... 223 C 192.168.10.4 192.168.10 = nettverksadresse4 = stasjonsadresse
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
Subnettmaske Med en subnettmaske kan nettverksklassene deles inn på en enda finere måte. Påsamme måte som IP-adressen, fremstilles subnettmasken også ved hjelp av fire desi-maltall som er adskilt ved hjelp av punktum.Eksempel: 255.255.255.128Hvert desimaltall står for én Byte (= 8 bit) i subnettmasken og kan også fremstilles binært(se tabellen under).
Hvis du skriver IP-adressen og subnettmasken under hverandre, vil du se at alle ettal-lene i binærfremstillingen av subnettmasken utgjør delen av nettverksadressen og atalle nullene utgjør stasjonsadressen (se tabellen under).
Klasse C-nettverket med adresse 192.168.10. inndeles videre i subnettmasken255.255.255.128. Det oppstår to nettverk med adressene 192.168.10.0 og192.168.10.128.Stasjonsadressene som er mulige i de to nettverkene lyder som følger:• 192.168.10.1 ... 192.168.10.126• 192.168.10.129 ... 192.168.10.254Ved hjelp av en logisk AND-operasjon for IP-adresse og subnettmaske, fastsetter nett-verksstasjonene om det befinner seg en kommunikasjonspartner i det egne nettverketeller i et annet nettverk. Hvis kommunikasjonspartneren befinner seg i et annet nettverk,anropes standard-gateway for videreføring av dataene.
Standard gateway Standard gateway adresseres også via en 32 bit-adresse. 32 bit-adressen fremstillesmed fire desimaltall som er adskilt fra hverandre ved hjelp av punktum.Eksempel: 192.168.10.1Standard gateway danner forbindelsen til andre nettverk. På denne måten kan en nett-verksstasjon som ønsker kontakt med en annen stasjon bruke en logisk AND-operasjonmed IP-adressen for å finne ut om ønsket stasjon befinner seg i det egne nettverket.Hvis det ikke er tilfelle, adresserer den standard gateway (router), som må befinne segi et eget nettverk. Standard gatewayen videreformidler deretter datapakkene.
DHCP (Dynamic Host Configuration Protocol)
Som alternativ til manuell innstilling av de tre parameterene IP-adresse, subnettmaskeog standard-gateway kan disse parametrene også tilordnes automatisert i Ethernet-nettverket via en DHCP-server. IP-adressen tilordnes da fra en tabell som inneholder en tilordning av MAC-adresse tilIP-adresse.Om DHR41B venter tilordningen av IP-parameterene manuelt eller via DHCP, viserparameter P785.
Byte 1 Byte 2 Byte 3 Byte 4
11111111 . 11111111 . 11111111 . 10000000
Byte 1 Byte 2 Byte 3 Byte 4
IP-adressedesimal 192 . 168. . 10 . 129
binær 11000000 . 10101000 . 00001010 . 10000001
Subnettmaskedesimal 255 . 255 . 255 . 128
binær 11111111 . 11111111 . 11111111 . 10000000
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
37
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
38
4.5.6 Driftsindikatorer for styring MOVI-PLC® advanced DHR41B i PROFINET-drift
På opsjonskortet DHR41B er det fire lysdioder (L11, L12, L13, L14) som viser aktuellstatus for DHR41B, PROFINET-systemet og sikkerhetsopsjonen.
LED 12 (FS) LED L12 (FAILSAFE-STATUS) viser failsafe-statusen på PROFINET.
LED L13 (BUS-FAULT)
LED L13 (BUS FAULT) viser tilstanden til PROFINET.
MERKLysdiodene (L1-L10) som er identiske for DHE41B er beskrevet i kapitlet "Driftsindika-torer for styring MOVI-PLC® advanced DHE41B".
Status for LED FS
Årsak til feil Utbedring av feil
Grønn • Sikkerhetsopsjonen er i syklisk datautveksling med F-Host (Data-Exchange).
• Normal driftstilstand.
–
Rød • Feilstatus i sikkerhetsdelen.• Forsyningsspenningen 24 V_LS
mangler.
• Les av diagnostikken i F-Host• Fjern årsaken til feilen og kvitter til slutt i
F-Host.
AV • Sikkerhetsopsjonen befinner seg i initialiseringsfasen.
• Kontroller spenningsforsyningen.• Kontroller prosjekteringen av buss-
masteren.
Blinker grønt/rødt
Det forelå en feil i sikkerhetsdelen, årsaken til feilen er fjernet – kvittering nødvendig.
Kvitter for feilen i F-Host (gjenintegrering).
Status for LED L13
Årsak til feil Utbedring av feil
AV • PROFINET-IO-Device befinner seg i datautveksling med PROFINET-IO-Controller (Data Exchange).
-
Blinker grøntBlinker grønt/rødt
• Blinkekontrollen i PROFINET IO-Controller-prosjekteringen er akti-vert for å lokalisere deltakeren optisk.
-
Rød • Forbindelsen til PROFINET IO-Controller er brutt.
• PROFINET-IO-Device registrerer ingen link
• Bussavbrudd• PROFINET IO-Controller er ikke i
drift
• Kontroller PROFINET-tilkoblingen på opsjon DHR41B
• Kontroller PROFINET IO-styreenheten• Kontroller kablingen til PROFINET-
nettet
GulBlinker gult
• Det ble plugget en ikke tillatt modul til STEP 7 maskinvarekonfigurasjonen.
• Sett STEP 7 maskinvarekonfigura-sjonen på ONLINE og analyser modul-tilstandene til kontaktene til PROFINET IO-Device.
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
LED L14 (RUN) LED L14 (RUN) viser at busselektronikken fungerer normalt.
LED Link/Activity De to lysdiodene Link (grønn) og Activity (gul) som er integrert i RJ45-hurtigkontaktene(X30-1, X30-2) viser statusen til Ethernet-forbindelsen.
Statuser for LED L14
Årsak til feil Utbedring av feil
Grønn • DHR41B-maskinvare OK.• Forskriftsmessig drift
–
AV • DHR41B er ikke klar til drift.
• Slå enheten på igjen. Kontakt SEW hvis problemet gjentar seg.
Rød • Feil i DHR41B-maskinvaren
Blinker grønt
• Maskinvaren til DHR41B starter ikke.
Blinker gult • Slå enheten på igjen. Still inn default IP-adres-separameter med DIP "S1". Kontakt SEW hvis problemet gjentar seg.
Gul • Slå enheten på igjen. Kontakt SEW hvis problemet gjentar seg.
63365AXX
LED / status Forklaring
Link / grønn Det er opprettet en Ethernet-forbindelse.
Link / av Det er ikke opprettet en Ethernet-forbindelse.
Activity / gul Data utveksles nettopp via Ethernet.
X30-1
X30-2
LED "Link"
LED "Activity"
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
39
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
40
4.5.7 Stille inn IP-adresseparametere via DCPFørste idriftsettelse
For PROFINET IO spesifiseres IP-adresseparameterene via protokollen "DCP" (Disco-very and Configuration Protocol). DCP fungerer med enhetsnavn (device name).Enhetsnavnet identifiserer en PROFINET IO-stasjon entydig i nettet. Den identifiseresmed PROFINET IO-controller (styring) ved prosjekteringen av stasjonen og stilles ogsåinn på PROFINET IO-enheten via prosjekteringsprogramvaren. Ved hjelp av enhets-navnet identifiserer controlleren enheten under oppstarten og overfører de tilhørendeIP-adresseparameterene. Det er da ikke lenger nødvendig å foreta innstillinger direktepå slaven.
Tilbakestille IP-adresse-parametere
Hvis IP-adresseparameterene ikke er kjent, og man ikke får tilgang til omformeren viadet serielle grensesnittet eller med betjeningsenheten DBG60B, kan du tilbakestilleIP-adresseparameterene til standardverdi med DIP "20".Opsjonen DHR41B settes da på følgende standardverdier:• IP-adresse: 192.168.10.4• Subnettmaske: 255.255.255.0• Standard gateway: 1.0.0.0• PROFINET-enhetsnavn: PNETDeviceName_MACID
Gå frem i følgende rekkefølge for å tilbakestille IP-adresseparameterene til standard-verdier:• Koble ut nettspenningen og DC 24 V-forsyningsspenningen.• Still DIP "20" på opsjonen DHR41B på "1".• Koble nettspenningen og DC 24 V-forsyningsspenningen inn igjen.• Vent til opsjonen DHR41B booter. Det ser du på grønn LED "Run".
Du har nå tilgang til omformeren via IP-adressen 192.168.10.4. Slik stiller du inn nyeIP-adresseparametere:• Start MOVITOOLS® MotionStudio.• Still inn ønskede adresseparametere.• Still DIP "20" på opsjonen DHR41B på "0".• De nye adresseparameterene overtas når enheten slås av og deretter på igjen.
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
4.5.8 Driftsindikatorer for styring MOVI-PLC® advanced DHR41B i EtherNet/IP-drift
LED L13 og L14 på opsjonskortet DHR41B viser aktuell status for DHR41B ogEtherNet/IP-systemet.
LED L13 (NETWORK STATUS)
LED L13 (NETWORK STATUS) viser statusen til EtherNet/IP-systemet.
LED L14 (MODULE STATUS)
LED L14 (MODULE STATUS) viser at busselektronikken fungerer slik den skal.
Status for LED L13 Forklaring
AV Opsjonskort DHR41B har ennå ingen IP-parameter.
Blinker grønt/rødt Opsjonskortet DHR41B foretar en LED-test.
Blinker grønt Det finnes ingen styrende IO-forbindelse.
Grønn Det finnes en styrende EtherNet/IP IO-forbindelse.
Rød En konflikt ble registrert ved tildeling av IP-adresse. En annen deltaker i nettverket bruker samme IP-adresse.
Blinker rødt Den styrende IO-forbindelsen som ble bygget opp, befinner seg i timeout. Statusen tilbakestilles ved gjenstart av kommunikasjonen.
Status for LED L14 Forklaring
AV Opsjonskort DHR41B forsynes ikke med spenning, eller det er defekt.
Blinker grønt • Hvis LED NETWORK STATUS samtidig er AV, startes TCP/IP-stack på opsjonskort DHR41B. Hvis denne tilstanden vedvarer og DHCP er aktivert, venter opsjonskort DHR41B på dataene til DHCP-serveren.
• Hvis LED NETWORK STATUS samtidig blinker grønt, startes applikasjonen på opsjonskort DHR41B.
Blinker grønt/rødt Opsjonskortet DHR41B foretar en LED-test.
Grønn Opsjonskort DHR41B befinner seg i vanlig driftstilstand.
Rød Opsjonskort DHR41B befinner seg i feiltilstand.
Blinker rødt En konflikt ble registrert ved tildeling av IP-adresse. En annen deltaker i nettverket bruker samme IP-adresse.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
41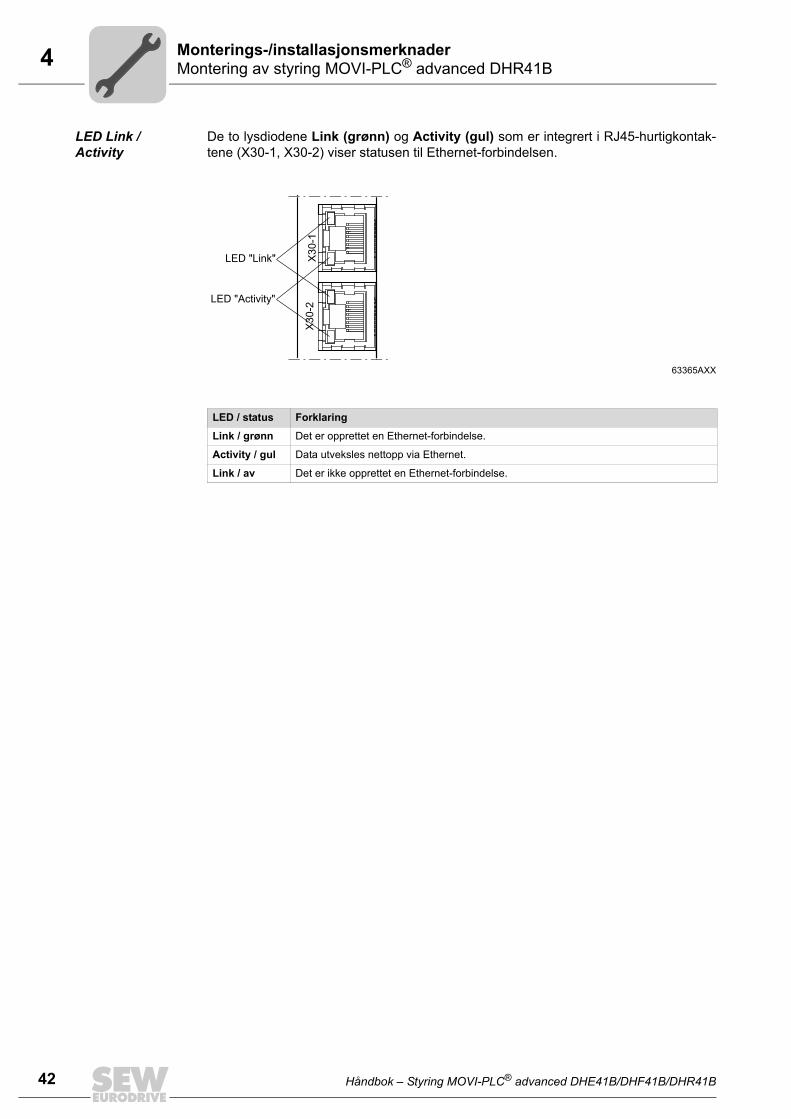
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
42
LED Link / Activity
De to lysdiodene Link (grønn) og Activity (gul) som er integrert i RJ45-hurtigkontak-tene (X30-1, X30-2) viser statusen til Ethernet-forbindelsen.
63365AXX
LED / status Forklaring
Link / grønn Det er opprettet en Ethernet-forbindelse.
Activity / gul Data utveksles nettopp via Ethernet.
Link / av Det er ikke opprettet en Ethernet-forbindelse.
X30-1
X30-2
LED "Link"
LED "Activity"
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
4.5.9 Stille inn IP-adresseparameter
Første idriftsettelse
Ved opsjonen DHR41B er protokollen DHCP (Dynamic Host Configuration Protocol)aktivert som standard. Dette innebærer at opsjonskortet venter DHR41B IP-adresse-parameterene fra en DHCP-server.
Når DHCP-serveren er konfigurert og subnettmasken og standard gateway er innstilt,må opsjonen DHR41B registreres i tildelingslisten til DHCP-serveren. MAC-ID til opsjonDHR41B tildeles en gyldig IP-adresse.
Endring av IP-adresse-parametere etter første gangs idriftsettelse
Hvis opsjon DHR41B er startet med en gyldig IP-adresse, har du også tilgang tilIP-adresseparameterene via Ethernet-grensesnittet.Slik endrer du IP-adresseparameterene via Ethernet: • med programvare MOVITOOLS® MotioStudio via Ethernet• med EtherNet/IP TCP/IP Interface-objektDu kan også endre IP-adresseparametere med operatørpanel DBG60B. Koble opera-tørpanelet DBG60B til det serielle grensesnittet (X24) til kompaktstyringen UOH21B.Hvis opsjonen DHR41B tildeles IP-adresseparameterene via en DHCP-server, kan dubare endre denne ved å tilpasse innstillingene til DHCP-serveren.Nevnte muligheter for endring av IP-adresseparameterene er bare mulig dersom forsy-ningsspenningene (nett og DC 24 V) kobles ut og deretter inn igjen.
MERKPå sine websider stiller firmaet Rockwell Automation en DHCP-server gratis til dispo-sisjon. Under følgende lenke kan du laste ned verktøyet med betegnelsen BOOTPUtility: http://www.ab.com/networks/bootp.html.
MERKDe konfigurerte IP-adresseparameterene overtas fast til parameterposten baredersom DHCP deaktiveres etter at IP-adressen er tildelt.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
43
4 onterings-/installasjonsmerknaderontering av styring MOVI-PLC® advanced DHR41B
44
Deaktivering/aktivering av DHCP
Type IP-adressetilordning bestemmes av innstillingen til attributtet ConfigurationControl til EtherNet/IP TCP/IP Interface Object. Verdien vises eller endres i parameterenP785 DHCP / Startup Configuration. • Innstilling Lagrede IP-parametere
De lagrede IP-adresseparameterene brukes.• Innstilling DHCP
IP-adresseparameterene anropes av en DHCP-server.Hvis en DHCP-server fra firmaet Rockwell Automation tas i bruk, kan du deaktivereeller aktivere DHCP via en knapp. I dette tilfellet sendes et EtherNet/IP-telegram tilTCP/IP Interface-objektet til den adresserte deltakeren.
Tilbakestille IP-adresse-parametere
Hvis IP-adresseparameterene ikke er kjent, og det ikke finnes noe serielt grensesnitteller operatørpanel DBG60B for lesing av IP-adressen, kan du tilbakestille IP-adresse-parameterene til standardverdi med DIP "20".Opsjonen DHR41B settes da på følgende standardverdier:• IP-adresse: 192.168.10.4• Subnettmaske: 255.255.255.0• Standard gateway: 1.0.0.0• P785 DHCP / Startup Configuration: Lagrede IP-parametere (DHCP er deaktivert)
Gå frem i følgende rekkefølge for å tilbakestille IP-adresseparameterene til standard-verdier:• Koble ut nettspenningen og DC 24 V forsyningsspenningen.• Still DIP "20" på opsjonen DHR41B på "1".• Koble nettspenningen og DC 24 V forsyningsspenningen inn igjen.• Vent til opsjonen DHR41B booter. LED-en MODULE STATUS lyser grønt når den
signaliserer dette.• Still DIP "20" på opsjonen DHR41B på "0".• Du har nå følgende muligheter til å tilordne den nye IP-adressen:
– med programvare MOVITOOLS® MotionStudio via Ethernet– via EtherNet/IP TCP/IP Interface-objekt
MERK• Hvis du stiller DIP "20" på 0 igjen, forblir DHCP deaktivert. Du aktiverer DHCP via
EtherNet/IP TCP/IP Interface Object parameter P785 eller DHCP-serveren tilfirmaet Rockwell Automation igjen.
• Ved tilbakestilling til fabrikkinnstilling (P802 Factory setting) forblir DHCP aktivert.
MM
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderMontering av styring MOVI-PLC® advanced DHR41B
4.5.10 Den integrerte Ethernet-svitsjen
Med den integrerte Ethernet-svitsjen kan du realisere de linjetopologiene som du er for-trolig med fra feltbussteknikken. Andre busstopologier, f.eks. stjerne eller tre, er selvsagtogså mulige. Ringtopologier støttes ikke.
Autocrossing Ethernet-switchens to porter som føres mot utsiden, har autocrossing-funksjonalitet.Dvs. at du kan bruke både Patch- og Cross-Over-kabelen for forbindelsen til nesteEthernet-deltaker.
Autonegotiation Under oppkoblingen til neste deltaker forhandler begge Ethernet-deltakere overførings-hastighet og duplex-modus. EtherNet/IP-tilkoblingens to Ethernet-porter støtter i denneforbindelse autonegotiation-funksjonaliteten og arbeider alternativt med en overførings-hastighet på 100 Mbit eller 10 Mbit i helduplex- eller i halvduplex-modus.
Merknader til Multicast-Handling
• Den integrerte Ethernet-svitsjen tilbyr ingen filterfunksjonalitet for Ethernet Multicast-telegrammer. Multicast-telegrammene som vanligvis sendes fra adapterne(DHR41B) til scannerne (PLS), videreføres til alle switchporter.
• IGMP-Snooping (som ved Managed Switches) støttes ikke.• SEW-EURODRIVE anbefaler derfor å kun koble opsjon DHR41B med nettverks-
komponenter som støtter IGMP-Snooping (f.eks. Managed Switch) eller som harbeskyttelsesmekanismer mot før høy Multicast-last integrert (f.eks. enheter fra SEW-EURODRIVE). Ved enheter som ikke har denne funksjonen integrert, kan det oppståfeilfunksjoner som følge av høy nettlast.
MERKAntallet Industrial Ethernet-svitsjer som er koblet i linje, påvirker telegrammenesløpetid. Når en melding gjennomløper enhetene, forsinkes meldingens løpetid medEthernet-switchens Store & Forward-funksjon:• ved 64 Byte meldingslengde med ca. 10 µs (ved 100 Mbit/s)• ved 1500 Byte meldingslengde med ca. 130 µs (ved 100 Mbit/s)Det betyr at meldingens løpetid blir større jo flere enheter som må gjennomløpes.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
45
4 onterings-/installasjonsmerknadernstallasjon av opsjon DH.41B i MOVIDRIVE® MDX61B
46
4.6 Installasjon av opsjon DH.41B i MOVIDRIVE® MDX61B
4.7 Installasjon av opsjon DH.41B i MOVIAXIS®-mastermodul
4.7.1 Funksjonsbeskrivelse av klemmene X5a / X5b (MOVIAXIS®-mastermodul)
• Pluggene X5a og X5b er koblet parallelt. På denne måten kan spenningsforsyningentil MOVIAXIS®-mastermodulen utføres fra høyre med X5b eller nedenfra med X5a.Ved tilkobling med X5a kan det tilkobles ytterligere moduler (f.eks. forsyningsmodul,aksemodul) over X5b. Spenningsforsyningen til bremsen (X5a/b:3, 4) ledes gjennomMOVIAXIS®-mastermodul.
• Styringen MOVI-PLC® advanced DH.41B kan forsynes fra MOVIAXIS®-switchmodul(MXS) eller fra en ekstern spenningskilde. X5 må da forbindes mellom de enkelteapparatene.
• Hvis styringen MOVI-PLC® advanced DH.41B forsynes gjennom MOVIAXIS®-switchmodulen med DC 24 V, er funksjonen av styringen MOVI-PLC® advancedDH.41B garantert videre ved nettbrudd. Dette er tilfelle hvis mellomkretsspenningenopprettholdes eller hvis en ekstern 24 V DC-forsyning er koblet til MOVIAXIS®-switchmodulen.
MERKStyringen MOVI-PLC® advanced DH.41B kobles til i henhold til kapitlet "Montasjealter-nativer for styring MOVI-PLC® advanced DH.41B". Styringen MOVI-PLC® advancedDH.41B forsynes med spenning via MOVIDRIVE® MDX61B. En spesiell spenningsfor-syning er kun nødvendig for de binære inn- og utgangene (plugg X31).
MERKStyringen MOVI-PLC® advanced DH.41B installeres i henhold til kapitlet "Montasjeal-ternativer for styring MOVI-PLC® advanced DH.41B". For kabellegging av systembusforbinder du plugg X33 (CAN 1) eller X32 (CAN 2) til MOVI-PLC® advanced DH.41Bmed plugg X9 (meldebus til MOVIAXIS®-forsyningsmodul eller en MOVIAXIS®-akse-modul) eller med plugg X12 (CAN-2-bus til en MOVIAXIS®-aksmodul). MOVIAXIS®-Mastermodul stiller ytterligere tilkoblinger til rådighet som beskrives etterfølgende.
MOVIAXIS® master-modul MXM Betegnelse Klemme Funksjon
59233AXX
Plugg X5b X5b:1X5b:2X5b:3X5b:4
DC 24 VEDGNDDC 24 VBBGND
Spenningsforsyning styreelektronikkReferansepotensial til styreelektronikkenSpenningsforsyning bremsReferansepotensial for bremsetilkobling
Plugg X5a X5a:1X5a:2X5a:3X5a:4
DC 24 VEDGNDDC 24 VBBGND
Spenningsforsyning styreelektronikkReferansepotensial til styreelektronikkenSpenningsforsyning bremsReferansepotensial for bremsetilkobling
X5b2
1
3
4
2
1
3
4
X5a
MI
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderInstallasjon av opsjon DH.41B i MOVIAXIS®-mastermodu
Tilkoblings-skjemaer
60301ANO
MOVIAXIS®
Mastermodul MXM
2
X5b
1 DC 24VE
DGND
3 DC 24VB
4 BGND
DC 24 V for bremseforsyning
DC-24 V-forsyningfor styreelektronikk+-+-
X16-+
DC 24 V ekstern
X5a
2
1
3
4
X5a
2
1
3
4
X5b
2
1
3
4
MOVIAXIS®
koblingsnettdel MXS
X35
X36
X37
2
4
6
1
3
5
X34
Vers
ion
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X3
2X
33
2
4
6
1
3
58
10
7
9X
31
T1
S1
L1
L2
L3
L5
XM
L6
L7
L8
L9
L4
L10
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
l
47

4 onterings-/installasjonsmerknadernstallasjon av opsjon DH.41B i MOVITRAC® B/kompaktstyring
48
4.8 Installasjon av opsjon DH.41B i MOVITRAC® B/kompaktstyring
4.8.1 Funksjonsbeskrivelse av klemmene og LED
4.8.2 Forbindelse RS485-grensesnitt COM 1 (plugg X24)
Pluggene X24 og X34:1/3/5 er koblet parallelt. Du kan koble et operatørpanel DOP11Btil X24. Hvis X24 ikke er tilordnet, kan du koble et operatørpanel eller en girmotor medintegrert frekvensomformer MOVIMOT® til X34:1/3/5.Du finner nærmere informasjon i kapitlet 4.4.5.
MERKStyringen MOVI-PLC® advanced DH.41B installeres i henhold til kapitlet "Montasjeal-ternativer for styring MOVI-PLC® advanced DH.41B". OpsjonsinnstikksplassenMOVITRAC® B og kompaktstyringen stiller i tillegg forbindelser og driftsindikatorer tilstyringen MOVI-PLC® advanced DH.41B til rådighet, som beskrives under.
FrontvisningMOVITRAC® B / kompaktstyring
Betegnelse LEDKlemme Funksjon
58905AXX
LED H1H2
SystemfeilReservert
Plugg X24:RS485 COM 1(RJ10-bøssing)
X24:4X24:3X24:2X24:1
DGNDRS– RS+5 V
Referansepotensial COM 1Signal RS485– Signal RS485+Spenningsinngang DC+24 V
SidevisningKompaktstyring Betegnelse Klemme Funksjon
58906AXX
Plugg X26:CAN 1 og spen-ningsforsyning(klemme som kan plugges inn)
X26:1X24:2X24:3X24:4X26:5X26:6X26:7
CAN1HCAN1LDGNDReservertReservertDGNDDC 24 V
Systembuss CAN 1 HighSystembuss CAN 1 LowReferansepotensial styring / CAN1--Referansepotensial styring / CAN1Spenningsforsyning styring
X24
H1
H2
2 3 4 5 6 71
X26
MI
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderInstallasjon av opsjon DH.41B i MOVITRAC® B/kompaktstyring
4.8.3 Tilkobling systembuss CAN 1 / spenningsforsyning (plugg X26)
X26:1/2/3 og plugg X33 er koblet parallelt (Æ kap. 3.3.3). Spenningsforsyningen til sty-ring MOVI-PLC® advanced DH.41B i kompaktstyringen skjer over X26:6/7.Styringen MOVI-PLC® advanced DH.41B kan forsynes med nødvendig spenning avMOVITRAC® B. Forbind da X26:3 (6) / 7 med X46:3 (6) / 7 eller med X12:9 / 8. Hvisstyringen MOVI-PLC® advanced DHE41B forsynes gjennom MOVITRAC® B medDC 24 V, er funksjonen til styringen MOVI-PLC® advanced DHE41B garantert videreved nettbrudd. Ved dette er det nødvendig med en ekstern DC 24 V-forsyning påX12:8 / 9 til MOVITRAC® B.
60302AXXFig. 9: Installasjon av MOVI-PLC® advanced DHE41B i MOVITRAC® B
X45 X46
1 2 3 4 5 6HL ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
X26
1 2 3 4 5 6 7
X24
H1
H2
X1212345678
24V IODC 24V
-
+
9GND
=
120
Ω
X35
X36
X37
2
4
6
1
3
5
X3
4
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X3
2X
33
2
4
6
1
3
58
10
7
9
X3
1
T1S1
L1L2
L3L5
XML6
L7L8
L9L4
L10
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
49
4 onterings-/installasjonsmerknadernstallasjon av opsjon DH.41B i MOVITRAC® B/kompaktstyring
50
4.8.4 Driftsangivelser opsjonsinnstikksplass MOVITRAC® B / kompaktstyring
LED H1 LED H1 signaliserer riktig drift over forbindelse X26.
LED H2 LED H2 er reservert.
60304ANOFig. 10: Installasjon av kompaktstyring MOVI-PLC® advanced DHE41B/UOH..B
X26
1 2 3 4 5 6 7
SEW Drive
Kompaktstyring
DC +24 VGND
X24
H1
H2
SC11 Systembuss +, CAN highSC12 Systembuss -, CAN low
GND, CAN GND
12
0Ω
X35
X36
X37
2
4
6
1
3
5
X34
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X32
X33
2
4
6
1
3
58
10
7
9
X31
T1
S1
L1
L2
L3
L5
XM
L6
L7
L8
L9
L4
L1
0
Status LED H1 Diagnostikk Utbedring av feil
AV • Riktig drift av forbindelse X26 -
MI
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

4Monterings-/installasjonsmerknaderEngineering-grensesnitt til styringen MOVI-PLC® advanced DH.41B
4.9 Engineering-grensesnitt til styringen MOVI-PLC® advanced DH.41BEngineering-tilgang til styring MOVI-PLC® advanced DH.41B foregår via grensesnittetEthernet 2: I tillegg er engineering-tilgangen ved styring MOVI-PLC® advanced DHF41Bmulig via Profibus (plugg X30P) og ved styring MOVI-PLC® advanced DHR41B muligvia Ethernet (plugg X30-1/2).
4.10 Avskjerm og forlegg buskabelenBruk bare skjermede kabler og forbindelseselementer som oppfyller kravene i henholdtil kategori 5, klasse D, i henhold til IEC 11801 utgave 2.0.En fagmessig skjerming av busskabelen demper de elektriske spredningene som kanforekomme i industriområder. Med følgende forholdsregler oppnår du de beste avskjer-mingsegenskapene:• Trekk festeskruene til plugger, moduler og potensialutligningsledninger til for hånd.• Bruk kun kontakter med metallhus eller metallisert hus.• Avskjermingen i pluggen må tilkobles over en stor flate.• Legg avskjermingen til bussledningen på begge sider.• Signal- og busskabelen må ikke forlegges parallelt med effektkabler (motorled-
ninger), men helst i adskilte kabelkanaler.• Bruk metalliske, jordede kabelbrisker i industrielle omgivelser.• Før signalkabelen og tilhørende potensialutligning til hverandre med liten avstand og
ad korteste vei.• Unngå forlengelse av bussledninger over pluggforbinder.• Legg bussledningene langs og nær eksisterende godsflater.
MERKDu finner nærmere informasjon i håndboken "MOVI-PLC® advanced feltbussgrense-snitt PROFIBUS DP-V1, Ethernet TCP/IP, EtherNet/IP, DeviceNet, Modbus TCP/IP".
STOPP!Ved jordpotensialsvingninger kan det flyte en utligningsstrøm over skjermen som ertilkoblet på begge sider og med jordingspotensial (PE). I dette tilfellet må du sørge foren tilstrekkelig potensialutligning iht. gyldige VDE-bestemmelser.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
51
5 rosjektering og igangsettingrosjektering med PC-programvare MOVITOOLS® MotionStudio
52
5 Prosjektering og igangsettingI dette kapittelet får du informasjon angående prosjektering og igangsetting• av styring MOVI-PLC® advanced DH.41B• av omformeren som styres over styringen MOVI-PLC® advanced DH..1B• av en PROFIBUS DP-master
5.1 Prosjektering med PC-programvare MOVITOOLS® MotionStudioProsjektutvalg • Start programvaren MOVITOOLS® MotionStudio
• Hvis du vil opprette et nytt prosjekt markerer du opsjonen [Nytt prosjekt] [1].• Hvis du vil åpne et eksisterende prosjekt markerer du opsjonen [Åpne prosjekt] [2].
58335AXXFig. 11: Startvindu MOVITOOLS® MotionStudio
[1] Opsjon [Nytt prosjekt][2] Opsjon [Åpne prosjekt]
[1]
[2]
PP
00
I
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

5Prosjektering og igangsettingProsjektering med PC-programvare MOVITOOLS® MotionStudio
Engineering-tilgangens muligheter
Du har to muligheter til å bygge opp engineering-tilgangen til MOVI-PLC® advancedDH.41B over grensesnittet Ethernet 2 (X37):• Ved en punkt til punkt-forbindelse kobler du grensesnitt Ethernet 2 (X37) til styringen
MOVI-PLC® advanced DH.41B direkte til Ethernet-grensesnittet på en engineering-PC. På din engineering-PC bruker du et grensesnitt som ikke benyttes for å koblePC'en til Intranet/Internett. På denne måten unngår du en ny konfigurasjon av gren-sesnittet.
• Integrer styringen MOVI-PLC® advanced DH.41B i et nettverk over grensesnittetEthernet 2 (X37). Rediger konfigurasjonsfilen NetConfig.cfg i mappen "System" påSD-minnekortet for å utføre nødvendige adresseinnstillingene. Du har følgendemuligheter til å få tilgang til konfigurasjonsfilen NetConfig.cfg:– Ta SD-minnekortet ut av styringen MOVI-PLC® advanced DH.41B og stikk det inn
i en lese-/skriveenhet for minnekort.– Etabler først en punkt-til-punkt-forbindelse til styringen MOVI-PLC® advanced
DH.41B. Deretter kan du ved hjelp av en FTP-Client ta tilgang til konfigurasjons-filen NetConfig.cfg.
På eldre nettverksgrensesnitt kan det være nødvendig å bruke en cross-kabel tilpunkt-til-punkt-forbindelsen.
Adresseinnstil-linger for en punkt-til-punkt-forbindelse
• Stille inn standard IP-adresse:– Koble styringen MOVI-PLC® advanced DH.41B fri for spenning.– Skyv DIP S1 til øverste stilling.– Forsyn styringen MOVI-PLC® advanced DH.41B med spenning igjen. Ethernet 2-
grensesnittet til styring MOVI-PLC® advanced DH.41B tildeles automatiskIP-adresse 192.168.10.4 og nettmaske 255.255.255.0.
• Stille inn andre adresser:Du kan stille inn andre adresser ved manuell redigering av avsnittet <Ethernet2...> ikonfigurasjonsfilen NetConfig.cfg i mappen "System" på SD-minnekortet. Eksempel:<!-- Ethernet2 is engineering interface --><Ethernet2><IPAddress>192.168.10.4</IPAddress><Netmask>255.255.255.0>/Netmask><Gateway>192.168.10.1</Gateway><Nameserver>0.0.0.0</Nameserver><Hostname>MOVI-PLC_Eth2>/Hostname></Ethernet2>Skyv DIP S1 til nederste stilling. Da er det sikret at adressene brukes neste gangstyringen MOVI-PLC® advanced DH.1B bootes.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
00
I
53

5 rosjektering og igangsettingrosjektering med PC-programvare MOVITOOLS® MotionStudio
54
• Stille inn PC-grensesnittets IP-adresse:– Velg det aktuelle PC-grensesnitt under [Start] / [Settings] / [Network connections]
og velg PC-grensesnittets egenskapsvindu i kontekstmenyen.– I egenskapene i posisjonen "Internet protocol (TCP/IP)" velger du alternativet
"Use following IP address".– Tast inn den nettmasken som er stilt inn i styringen MOVI-PLC® advanced
DH.41B (f.eks. 255.255.255.0, når DIP S1 er i øverste stilling).– Still inn IP-adressen avhengig av nettmasken. IP-adressene til styringen
MOVI-PLC® advanced DH.41B (Ethernet 2) og PC-grensesnittet må være for-skjellige med unntak av de områder som defineres ved nettmasken. IP-adres-sene må være like i det området som defineres av nettmasken. Siste Byte iIP-adressen skal ikke være verken 0 eller 255.Eksempel:
I eksemplet må de siste 8 bitene i IP-adressene til styring MOVI-PLC® advancedDH..41B og PC-grensesnittet være forskjellige.
Adresseinnstil-linger ved engi-neering-tilgang over et nettverk
For å etablere engineering-tilgangen til styring MOVI-PLC® advanced DH.41B over eteksisterende nettverk, må du gå frem på følgende måte:• I avsnittet <Ethernet2...> i konfigurasjonsfilen NetConfig.cfg i mappen "System" på
SD-minnekortet fører du inn følgende opplysninger i samsvar med opplysningene fradin nettverksadministrator:– IP-adresse– Nettmaske– Gateway-adresse
• Skyv DIP S1 til nederste stilling. Da er det sikret at adresseinnstillingene brukesneste gang styringen MOVI-PLC® advanced DH.41B bootes.
Nettmaske
desimal binær
255.255.255.0 11111111.11111111.11111111.00000000
PP
00
I
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

5Prosjektering og igangsettingProsjektering med PC-programvare MOVITOOLS® MotionStudio
Innstilling av engineering- tilgangen i MOVITOOLS® MotionStudio
• Åpne menypunktet "Configure communication plugs" i menyen "Network" iMOVITOOLS® MotionStudio.
• Velg oppføringen "Ethernet" [1] i nedtrekksmenyen. Klikk på knappen <Edit> [2].Bekreft valget med <OK>.
• Klikk med høyre musetast på det tomme feltet "IP addresses of SMLP servers" ogvelg menypunktet "Add IP address" for å føye til IP-adressen til Ethernet 2-grense-snittet til styring MOVI-PLC® advanced DH.41B (se bildet nedenfor). Bekreft innstil-lingen med <OK>.
63436AXX
11950AXX
[1]
[2]
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
00
I
55

5 rosjektering og igangsettingrosjektering med PC-programvare MOVITOOLS® MotionStudio
56
• Alternativt kan du under integreringen av styringen MOVI-PLC® advanced DH.41B iet eksisterende nettverk legge inn nettverksadressen (den delen av IP-adressenhvor nettmaskens biter er satt) i inndatafeltet "Broadcast-IP Address", fylt med sattebiter for bruk av broadcast-meldinger i det angitte nettverket. I et slikt tilfelle må duikke skrive noe i feltet "IP-address". Eksempel:– IP-adresse: 10.3.71.38– Nettmaske: 255.255.255.0– Broadcast IP-adresse: 10.3.71.255
• Foreta deretter en elektronisk skanning av nettverket. Klikk da på symbolet "Scan" iMOVITOOLS® MotionStudio (Æ bildet nedenfor).
11951AXX
PP
00
I
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

5Prosjektering og igangsettingProsjektering med PC-programvare MOVITOOLS® MotionStudio
Apparatspesifikt verktøysutvalg
• Klikk på symbolet < > (Scan) i MOVITOOLS® MotionStudio. Programvaren visernå i enhetsstammen alle enheter som er tilkoblet engineering-PC (Æ følgende bilde).
• Start PLC-redigeringsprogrammet. Klikk så f.eks. med høyre musetast på innfø-ringen "MOVI-PLC® advanced DH.41B". Velg menypunktet "Programming" i kon-tekstmenyen. I PLC-redigeringsprogrammet kan du nå opprette et nytt prosjekt elleråpne et eksisterende prosjekt.
• PLC-redigeringsprogrammet brukes til å programmere styringen MOVI-PLC®
advanced DH.41B. Du finner nærmere informasjon om programmering av styringenMOVI-PLC® advanced DH.41B i systemhåndboken "MOVI-PLC® programmering iPLC-redigeringsprogrammet" og håndbøkene: – Bibliotek MPLCMotion_MDX og MPLCMotion_MX for MOVI-PLC®
– Bibliotek MPLCMotion_MC07 og MPLCMotion_MM for MOVI-PLC®
11952AXX
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
00
I
57

5 rosjektering og igangsettingrosjektering og igangsetting av drivenhetene
58
5.2 Prosjektering og igangsetting av drivenheteneProsjekteringen og igangsetting av drivenhetene er beskrevet i følgende bibliotekhånd-bøker:
5.3 Prosjektering og igangsetting i PLC-redigeringsprogrammet
5.4 Fremgangsmåte ved apparatutskiftningVed skifte av en styring MOVI-PLC® advanced DHF41B, en kompaktstyring eller et styrtdrev, går du frem iht. kapittel 4.2 og 4.3. Stikk SD-kortet fra den gamle styringen inn iden nye styringen.
Drev Håndbok
MOVIDRIVE® B MOVIAXIS®
Bibliotek MPLCMotion_MDX og MPLCMotion_MX for MOVI-PLC®
MOVITRAC® 07 / B MOVIMOT®
Bibliotek MPLCMotion_MC07 og MPLCMotion_MM for MOVI-PLC®
MERKHvis styringen MOVI-PLC® advanced DH.41B skal kjøres når den er montert iMOVIDRIVE® MDX61B, må omformer MOVIDRIVE® MDX61B som minimum ha firm-warestatus ".16".Dette gjelder uavhengig av om omformeren styres av den innebygde MOVI-PLC®
advanced DH.41B eller om innstikksplassen til omformeren kun brukes til monteringav styringen MOVI-PLC® advanced DH.41B ved samtidig styring av andre omformere(f.eks. MOVITRAC® B).
MERK• Du finner informasjon vedrørende programmering av styringen MOVI-PLC®
advanced DH.41B i systemhåndboken "MOVI-PLC® programmering i PLC-redige-ringsprogrammet".
• Du finner nærmere informasjon om prosjektering av masteren i ulike feltbussys-temer i håndboken "MOVI-PLC® advanced feltbussgrensesnitt PROFIBUS DP-V1,Ethernet TCP/IP, EtherNet/IP, DeviceNet, Modbus TCP/IP".
MERKVariabelverdiene som er lagret remanent på styringen MOVI-PLC® advanced DH.41Ber som standard ikke lagret på SD-kortet. Det kan enten være programmert via appli-kasjonen (IEC-program), eller sikkerhetskopieringen må lagres i MOVITOOLS®
MotionStudio via prosjektadministratoren.Du finner informasjon om utskiftning av drivenhetene i håndbøkene til hver av omfor-merne.
PP
00
I
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

6FeildiagnostikkDiagnostikkforløp systembuss CAN 1 / CAN 2
6 Feildiagnostikk6.1 Diagnostikkforløp systembuss CAN 1 / CAN 2
Diagnostikkproblem: Kommunikasjonen over systembuss CAN 1 eller CAN 2 fungerer ikke.Utgangstilstand:• Systembuss CAN 1 eller CAN 2 er riktig tilkoblet.• Kommunikasjonen over systembuss CAN 1 eller CAN 2 er programmert.
Ç
Bussplugg stukket inn? nei Æ [A]jaÇ
Hvordan er LED CAN 1-status eller CAN 2-status?
oransje Æ [B]grønn Æ [C]
Lyser eller blinker rødtÇ
Systembuss CAN 1 eller CAN 2 er ute av drifteller kommunikasjonen til systembuss har feil.
Ç
[A]Ç
Kontroller innstilt overføringshastighet.
Ç
Overføringshastighet OK? nei Æ [D]jaÇ
Kontroller korrekt tilkobling av motstandsimpedanser.
[A] Kontroller busskabelleggingen!
[B] Systembuss CAN 1 eller CAN 2 initialiseres for øyeblikket.
[C] Busskommunikasjonen er OK.
Ç
Kontroller applikasjonsprogrammet!
[D] Korriger overføringshastigheten!
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
59
6 eildiagnostikkiagnostikkforløp PROFIBUS-DP
60
6.2 Diagnostikkforløp PROFIBUS-DP
Diagnostikkproblem: Styringen MOVI-PLC® advanced DHF41B fungerer ikke på PROFIBUS.Utgangstilstand:• Styring MOVI-PLC® advanced DHF41B er koblet fysisk til på
PROFIBUS.• Styring MOVI-PLC® advanced DHF41B er prosjektert i DP-master,
og busskommunikasjonen er aktiv.
Ç
Bussplugg stukket inn? nei Æ [A]jaÇ
Hvordan er LED Fault Profibus?AV Æ [B]PÅ Æ [C]
BLINKERÇ
Styringen MOVI-PLC® advanced DHF41B identifiserer overføringshastig-heten, men ble ikke prosjektert eller prosjektert feil i DP-Master.
Ç
Kontroller PROFIBUS-adressen, som er prosjektert og stilt inn med DIP.
Ç
PROFIBUS-adresser like? nei Æ [D]jaÇ
Du har eventuelt prosjektert feil apparattype eller definert en feil konfigurasjon.
Ç
Slett prosjekteringen for styringen MOVI-PLC® advanced DHF41B fra DP-nettet.
Ç
Utfør en ny prosjektering for styring MOVI-PLC® advanced DHF41B, velg enhetsbetegnelsen "MOVI-PLC".Bruk en forhåndsdefinert konfigurasjon for enkel prosjektering. Ikke utfør endringer på de forhåndsinnstilte konfigurasjonsdataene!Gi adresseområdene til ditt styringssystem.
Ç
Last nå prosjekteringen inn i DP-master og start busskommunikasjonen på nytt.
[A] Kontroller busskabelleggingen!
[B] Styring MOVI-PLC® advanced DHF41B befinner seg i syklisk datautveks-ling med DP-master.
[C] Styringen MOVI-PLC® advanced DHF41B gjenkjenner ikke overførings-hastigheten.Kontroller busskabelleggingen!
[D] Tilpass bussadressen!
FD
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

7Tekniske data og målskisserGenerelle tekniske data
7 Tekniske data og målskisser7.1 Generelle tekniske data
De generelle, tekniske data som er oppførte i følgende tabell gjelder for:• styring MOVI-PLC® advanced DH.41B som er integrert i omformeren• Kompaktstyring MOVI-PLC® advanced DH.41B/UOH..B
Immunitet mot interferens
Oppfyller EN 61800-3
Omgivelsestemperatur Montert i MOVIDRIVE® MDX61B:• 0 °C ... +60 °C
(Derating ved 40 °C ... 60 °C Æ Systemhåndbok MOVIDRIVE® MDX60B/61B)
Montert i MOVITRAC® B (AC 230 V; AC 400/500 V til 4 kW):• –10 °C ... +60 °C
(Derating ved 40 °C ... 60 °C Æ Systemhåndbok MOVITRAC® B)
Montert i MOVITRAC® B (AC 400/500 V over 4 kW):• 0 °C ... +60 °C
(Derating ved 40 °C ... 60 °C Æ Systemhåndbok MOVITRAC® B)
Montert i MOVIAXIS®-mastermodul:• 0 °C ... +45 °C
Kompaktstyring:• –10 °C ... +60 °C
Klimaklasse EN 60721-3-3, klasse 3k3
Lagertemperatur –25 °C ... +70 °C
Klimaklasse EN 60721-3-3, klasse 3k3
Kjøletype Konveksjonskjøling
Vernetype IP20
Driftstype Varig drift (se systemhåndbok MOVIDRIVE® MDX60B/61B, MOVITRAC® B, MOVIAXIS®)
Tilskitningsklasse 2 etter IEC 60664-1 (VDE0110-1)
Installasjonshøyde maks. 4 000 m (NN)
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
Pi
fkVA
Hz
n
61

7 ekniske data og målskissertyring MOVI-PLC® advanced DHE41B
62
7.2 Styring MOVI-PLC® advanced DHE41B
Styring MOVI-PLC® advanced DHE41B
Delenummer MOVI-PLC® advanced DHE41B: 1821 160 7
Elektrisk forsyning For alle enheter (MDX, MX, kompaktstyring) gjelder:• De binære inn- og utgangene må forsynes separat med DC 24 V (X31:1/2)
Montert i MOVIDRIVE® MDX61B:• Effektopptak: Pmax = 6,8 W• Styringen MOVI-PLC® advanced DHE41B forsynes over MOVIDRIVE® MDX61B over pluggen på
baksiden.• Ved strømbrudd er funksjonen til styringen garantert videre gjennom den DC-24-V-støttedriften
(ekstern DC-24-V-forsyning på X10:9/10 til MOVIDRIVE® MDX61B nødvendig).
Montert i MOVIAXIS®-mastermodul (MXM):• Effektopptak: Pmax = 8,5 W• U = DC 24 V (–15 % / +20 %)• Imax = 600 mA• Styringen MOVI-PLC® advanced DHE41B kan forsynes fra MOVIAXIS®-switchmodul (MXS) eller fra
en ekstern spenningskilde. X5 må da forbindes mellom de enkelte apparatene.• Hvis styringen MOVI-PLC® advanced DHE41B forsynes gjennom MOVIAXIS®-switchmodulen med
DC 24 V, er funksjonen av styringen MOVI-PLC® advanced DHE41B.. garantert videre ved nettbrudd (ekstern DC-24-V-forsyning på X16 til MOVIAXIS®-switchmodul nødvendig).
Potensialnivå Styring MOVI-PLC® advanced DHE41B har følgende potensialnivåer:• Potensial styring / CAN 1 / COM1• Potensial COM2• Potensial binære inn- og utganger• Potensial systembuss CAN 2
Minne • Programminne: 8 MByte (for applikasjonsprogram, inkl. IEC-biblioteker)• Dataminne: 4 MByte (for IEC-applikasjon)• Retaindata: 32 kByte• Systemvariabler (Retain): 8 kByte
Binærinnganger
X31:3...X31:10
Indre motstand
Signalnivå
Potensialfri (optokobler), PLS-kompatibel (IEC 61131-2), skannetid 1 ms, finnes ufiltrert og filtrert (filter-konstant ca. 2 ms)Konfigurerbar som binær inn- eller utgangerX31:6...X31:10 har interruptevne (reaksjonstid <100 ms)
Ri À 3 kÊ, IE À 10 mA
DC (+13 V...+30 V) = "1" = Kontakt lukket (iht. IEC 61131)DC (–3 V...+5 V) = "0" = Kontakt åpen (iht. IEC 61131)
Binærutganger
X31:3...X31:10
Signalnivå
PLS-kompatibel (IEC 61131-2), starttid 1 ms
Konfigurerbar som binær inn- eller utgangerMaksimalt tillatt utgangsstrøm er IA_max = DC 150 mA per binære utgang.Alle de åtte binærutgangene kan belastes samtidig med maksimal tillatt utgangsstrøm IA_max.
"0" = 0 V "1" = DC+24 V
Systembuss CAN 2X32:1 ... X32:3
• Systembus CAN 1 og CAN 2 iht. CAN-spesifikasjon 2.0, del A og B, overføringsteknikk iht. ISO 11898• Systembuss CAN 2 er adskilt galvanisk.• Maks. 64 deltagere per CAN-systembuss• Maks. 64 SCOM transmit-objekter / 256 receive-objekter per CAN-systembuss• Adresseområde 0...63• Overføringshastighet: 125 kBaud...1 MBaud• Hvis X32 eller X33 er bussavslutningen, må du tilkoble en avslutningsimpedans (120 Ê) eksternt• Du kan trekke ut plugg X32 eller X33, uten å avbryte systembuss• Systembuss kan brukes i sjikt 2 (SCOM syklisk, asyklisk) eller iht. SEW-MOVILINK®-protokoll
Systembuss CAN 1X33:1 ... X33:3
Ethernet 1 Systembuss, reservert
Ethernet 2 • TCP/IP• Tilkoblingsmuligheter: Engineering-PC, annen styring, Intranet
USB USB 1.0 for tilkobling av engineering-PC (under forberedelse)
RS485-grensesnitt COM1/2
X34:1 ... X34:6
• Pr. RS485-grensesnitt kan et operatørpanel DOP11A eller en girmotor kobles med integrert frekvens-omformer MOVIMOT®.
• E/A-standard, 57,6 / 9,6 kBaud, maks. kabellengde 200 m totalt • Dynamisk avslutningsmotstand fast integrert• COM 2 er galvanisk adskilt fra styringen MOVI-PLC® advanced
TS
Pi
fkVA
Hz
n
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

7Tekniske data og målskisserStyring MOVI-PLC® advanced DHE41B
SD-minnekortOMH41B-T0...T10
• PC-lesbart• Inneholder:
– Fast programvare– IEC-program– Data
• Min. 128 MB minne
Engineering Engineering foretas via grensesnittet Ethernet 2 (X37)Engineering av alle SEW-komponenter som er tilkoblet med styringen MOVI-PLC® advanced DHE41B kan gjøres over styringen MOVI-PLC® advanced DHE41B.Engineering av styringen MOVI-PLC® advanced DHE41B kan ikke gjennomføres over omformerne.• PC-programvare MOVITOOLS® MotionStudio med PLC-redigeringsprogram
Styring MOVI-PLC® advanced DHE41B
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
Pi
fkVA
Hz
n
63

7 ekniske data og målskissertyring MOVI-PLC® advanced DHF41B
64
7.3 Styring MOVI-PLC® advanced DHF41B
MERKTilkoblingene som er identiske for DHE41B er beskrevet i kapitlet "Styring MOVI-PLC®
advanced DHE41B".
Styring MOVI-PLC® advanced DHF41B
Delenummer MOVI-PLC® advanced DHF41B: 1821 161 5
Elektrisk forsyning Montert i MOVIDRIVE® MDX61B:• Effektopptak: Pmaks = 8 W
Montert i MOVIAXIS®-mastermodul (MXM):• Effektopptak: Pmax = 10 W
Potensialnivå Styring MOVI-PLC® advanced DHF41B har følgende potensialnivåer:• Potensial styring / CAN 1 / COM1• Potensial COM2• Potensial binære inn- og utganger• Potensial systembuss CAN 2• Potensial PROFIBUS
PROFIBUS-tilkoblingX30P:1 ... X30P:9
Bussavslutning
Automatisk registrering av overføringshastighet
Protokollvarianter
GSD-fil
DP-ID-nummer
Over 9-polet Sub-D-plugg, pluggbelegging iht. IEC 61158
Ikke integrert. Etabler bussavslutningen med egnet PROFIBUS-plugg med avslutningsimpedanser som kan kobles til.
9,6 kBaud ... 12 MBaud
PROFIBUS-DP og DP-V1 iht. IEC 61158
SEW_6007.GSD
ikke tildelt ennå
DeviceNet-tilkoblingX30D:1 ... X30D:5
• 2-leder-buss og 2-leder-forsyningsspenning DC 24 V med 5-polet Phönix-klemme• Pluggterminering etter DeviceNet-spesifikasjon
Kommunikasjonsprotokoll Master-Slave Connection-Set etter DeviceNet-spesifikasjon versjon 2.0
Antall prosessdataord • Kan programmeres via IEC-funksjon (0 ... 64 prosessdataord)• Etter ønske kan en parameterkanal brukes i tillegg til prosessdataordene.
Overføringshastighet 125, 250 eller 500 kbaud, kan stilles inn med DIP-ene 26 og 27
Busskabellengde For Thick Cable iht. DeviceNet-spesifikasjon 2.0 tillegg B:• 500 m ved 125 kbaud• 250 m ved 250 kbaud• 100 m ved 500 kbaud
Overføringsnivå ISO 11 98 - 24 V
MAC-ID 0 ... 63, kan innstilles med DIP-ene 20 ... 25
Maks. 64 deltakere
TS
Pi
fkVA
Hz
n
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

7Tekniske data og målskisserStyring MOVI-PLC® advanced DHR41B
7.4 Styring MOVI-PLC® advanced DHR41B
7.5 Kompaktstyring MOVI-PLC® advanced
Støttede tjenester • Polled I/O: 1 ... 10 ord• Bit-Strobe I/O: 1 ... 4 ord• Explicit Messages:
– Get_Attribute_Single– Set_Attribute_Single– Reset– Allocate_MS_Connection_Set– Release_MS_Connection_Set
Engineering Ekstra engineering-tilgang via PROFIBUS-grensesnittet (X30P)
Styring MOVI-PLC® advanced DHF41B
MERKTilkoblingene som er identiske for DHE41B/DHF41B er beskrevet i kapitlene "Installa-sjon av styring MOVI-PLC® advanced DHE41B/DHF41B".
Styring MOVI-PLC® advanced DHR41B
Delenummer MOVI-PLC® advanced DHR41B: 1821 632 3
Elektrisk forsyning Montert i MOVIDRIVE® MDX61B:• Effektopptak: Pmaks = 9,5 W
Montert i MOVIAXIS®-mastermodul (MXM):• Effektopptak: Pmax = 12 W
EthernettilkoblingX30-1, X30-2
Via RJ45-bøssing, kontakttilordning i henhold til IEC 11801Integrert Ethernet-switch med autocrossing- og autonegotiationfunksjoner.
Engineering Ekstra engineering-tilgang via PROFINET-, EtherNet/IP- og Modbus TCP/IP-grensesnitt (X30:1/2)
Kompaktstyring MOVI-PLC® advanced
Enhetsutførelser • MOVI-PLC® advanced DHE41B / UOH11B • MOVI-PLC® advanced DHF41B / UOH21B • MOVI-PLC® advanced DHR41B / UOH21B
Elektrisk forsyning • X26: U = DC 24 V (-15 % / +20 %)DGND må jordes (PELV)
• Opptatt effekt Pmax = 8,5 W, Imax = 600 mA
• X31: De binære inn- og utgangene må forsynes separat med DC 24 V.
MERKNADERVær oppmerksom på følgende informasjon:• Systembuss CAN1 er koblet parallelt på X33 og X26• RS485-grensesnitt COM 1 er koblet parallelt på X34 og X24• De ytterligere tekniske dataene er identiske iht. kap. 7.1 og 7.2.
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
Pi
fkVA
Hz
n
65
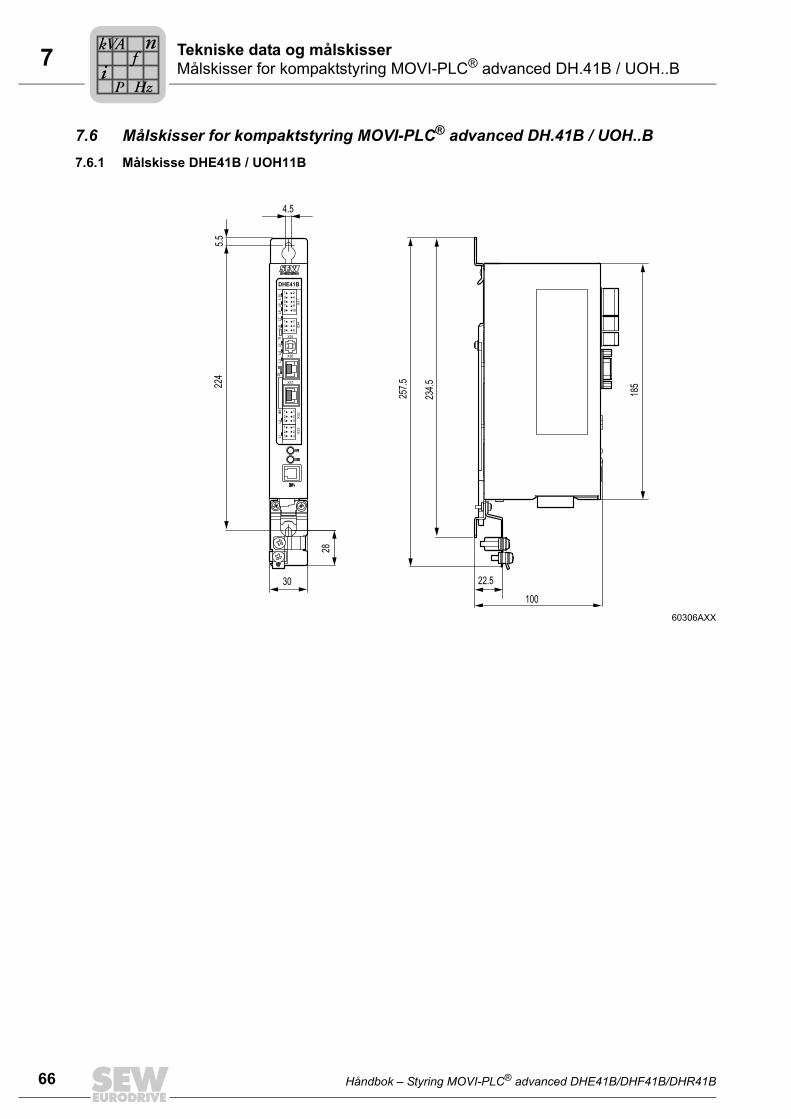
7 ekniske data og målskisserålskisser for kompaktstyring MOVI-PLC® advanced DH.41B / UOH..B
66
7.6 Målskisser for kompaktstyring MOVI-PLC® advanced DH.41B / UOH..B7.6.1 Målskisse DHE41B / UOH11B
60306AXX
4.55.
5
28
30
185
257.
5 224
234.
5
100
22.5
X35
X36
X37
2
4
6
1
3
5
X34
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X32
X33
2
4
6
1
3
58
10
7
9
X31
T1
S1
L1
L2
L3
L5
XM
L6
L7
L8
L9
L4
L10
TM
Pi
fkVA
Hz
n
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

7Tekniske data og målskisserMålskisser for kompaktstyring MOVI-PLC® advanced DH.41B / UOH..B
7.6.2 Målskisse DHF/DHR41B / UOH21B
63212AXX
4.5
5.5
28
30
286
358.
5
335.
5
100
22.5
DHF41B
2222
0123
222
456
27
2
4
6
1
2
3
X34
X35
X36
X37
XM
1
3
5
1
2
3
1
2
3
1
2
3
1
2
3
X32
X33
2
4
6
1
3
58
10
7
9
X31
X38
L18
X30P
S1
3
4
2
1
1
5
X30D
S2
L16
L15
L14
L13
L12
L11
L10
L9
L8
L7
T1
L6
L5
L4
L3
L2
L1
L17
ON
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
Pi
fkVA
Hz
n
67

8
68
deks
8 IndeksAAnsvarsfraskrivelse ...............................................6Automatiseringstopologier ..................................10Avskjerm og legg busskabelen ...........................51
BBusskabel
Skjerming og legging ....................................35
DDatautveksling PROFIBUS .................................12Diagnostikkdioder (LED) opsjon styring MOVI-PLC® advanced DH.41B ..........................13Diagnostikkforløp PROFIBUS-DP .......................60Diagnostikkforløp systembuss CAN 1 / CAN 2 ...59Driftsindikatorer for styring MOVI-PLC® advanced DHE41B .............................................21
LED 24V / I/O OK .........................................22LED CAN-1-status ........................................21LED CAN-2-status ........................................21LED DIO (n/m) ..............................................22LED IEC-programstatus ...............................21LED PLC-status ............................................22
Driftsindikatorer for styring MOVI-PLC® advanced DHF41B
LED BIO .......................................................29LED Fault Profibus .......................................31LED Mod/Net ................................................30LED PIO .......................................................30LED Run Profibus .........................................31
Driftsindikatorer for styring MOVI-PLC®
advanced DHR41B i EtherNet/IP-drift .................41LED MODULE STATUS ...............................41LED NETWORK STATUS ............................41
Driftsindikatorer for styring MOVI-PLC® advanced DHR41B i PROFINET-drift .................38
LED BUS-FAULT .........................................38LED FS (FAILSAFE-STATUS) .....................38LED Link/Activity ..........................................39LED RUN ......................................................39
EEndemotstand .....................................................19Engineering-grensesnitt til styringen MOVI-PLC® advanced DH.41B ..........................51
FFeildiagnostikk ................................................... 59
Diagnostikkforløp PROFIBUS-DP ............... 60Diagnostikkforløp systembuss
CAN 1 / CAN 2 ............................... 59Forbindelse MOVIDRIVE® B- / MOVITRAC® B - Ethernet .................................. 34Fremgangsmåte ved apparatutskiftning ............. 58Funksjonsbeskrivelse av klemmene, DIP og LED til MOVI-PLC® advanced DHE411B ..... 16Funksjonsbeskrivelse av klemmene, DIP og LED til MOVI-PLC® advanced DHF41B ........ 24Funksjonsbeskrivelse av klemmene, DIP-ene og LED til MOVI-PLC® advanced DHR41B ....... 32
GGarantikrav .......................................................... 5Generelle merknader
Ansvarsfraskrivelse ....................................... 6Garantikrav .................................................... 5Oppbygging av sikkerhetsmerknadene ......... 5
HHåndbokens innhold ............................................ 8
IInnledning ............................................................ 8
Håndbokens innhold ...................................... 8Videreførende litteratur .................................. 8
Innstilling av DIPStille inn overføringshastigheten ................. 28
Installasjon av MOVI-PLC® advanced DHE41B i MOVIAXIS®-mastermodul
Tilkoblingsskjema ........................................ 47Installasjon av MOVI-PLC® advanced DH.41B i MC07B / kompaktstyring
Driftsvisninger .............................................. 50Forbindelse RS485-grensesnitt COM 1
(plugg X24) ..................................... 48Tilkobling systembuss CAN 1 /
spenningsforsyning (plugg X26) ..... 49Installasjon av MOVI-PLC® advanced DH..41B i MC07B / kompaktstyring
Funksjonsbeskrivelse av klemmene og LED .... 48Installering
Avskjerm og legg busskabelen .................... 51Driftsindikatorer for styring MOVI-PLC®
advanced DHE41B ......................... 21Driftsindikatorer for styring MOVI-PLC®
advanced DHR41B i PROFINET-drift .............................. 38
In
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

8Indeks
Engineering-grensesnitt til styringen MOVI-PLC® advanced DH.41B .......51
Funksjonsbeskrivelse av klemmene X5a / X5b (MOVIAXIS®-mastermodul) .....46
Funksjonsbeskrivelse av klemmene, DIP og LED til MOVI-PLC® advanced DHE41B ..........................16
Funksjonsbeskrivelse av klemmene, DIP og LED til MOVI-PLC® advanced DHF41B ..........................24
Funksjonsbeskrivelse av klemmene, DIP-ene og LED til MOVI-PLC® advanced DHR41B ..........................32
MOVI-PLC® advanced DH.41B i MC07B / kompaktstyring ................................48
MOVI-PLC® advanced DH.41B i MOVIAXIS®-mastermodul ...............46
MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B ...................46
Tilkobling av binære inn- og utganger (plugg X31) til MOVI-PLC® advanced DHE41B ..........................17
Tilkobling av PROFIBUS (plugg X30P) til MOVI-PLC® advanced DHF41B ..26
Tilkobling av RS485-grensesnitt (plugg X34) til MOVI-PLC® advanced DHE41B ..19
Tilkobling DeviceNet (plugg X30D) for MOVI-PLC® advanced DHF41B ......27
Tilkobling systembuss CAN 2 (plugg X32) / CAN 1 (plugg X33) til MOVI-PLC® advanced DHE41B ..........................18
IP-adresse ...........................................................36
KKonfigurering av PROFIBUS-grensesnitt ............12Kontaktterminering RJ45-hurtigkontakt ...............34
LLED 24V / I/O OK ................................................22LED CAN-1-status ..............................................21LED CAN-2-status ..............................................21LED DIO (n/m) ....................................................22LED Fault Profibus ..............................................31LED FS (FAILSAFE-STATUS) ............................38LED IEC-programstatus ......................................21LED PIO ..............................................................30LED PLC-status ..................................................22LED Run Profibus ...............................................31
MMerknader til opphavsrett .................................... 6Montering
Monteringsmuligheter for styring MOVI-PLC® advanced DH.41B ...... 14
MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B .................. 14
Prinsipiell forløpmåte ved inn- og utbygging av et opsjonskort i MOVIDRIVE® MDX61B ......................................... 15
Montering av styring MOVI-PLC® advanced DHR41B ............................................................. 32Montering MOVI-PLC® advanced DH.41B i MOVIDRIVE® MDX61B ..................................... 14Målskisser
Kompaktstyring MOVI-PLC® advanced DHF/DHR41B / UOH21B ................ 67
Kompaktstyring MOVI-PLC® advanced DH.41B / UOH11B .......................... 66
NNettverksklasser ................................................ 36
OOppbygging av sikkerhetsmerknadene ................ 5Overføringshastighet .......................................... 28
PPrinsipiell fremgangsmåte ved montering og demontering av et opsjonskort i MOVIDRIVE® MDX61B ............................................................. 15PROFIBUS-overvåkingsfunksjoner .................... 12Prosjektering
Fremgangsmåte ved apparatutskiftning ...... 58Prosjektering og igangsetting ............................. 52
Med PC-programvare MOVITOOLS®-MotionStudio ................................... 52
Prosjektering og igangsetting av drivenhetene .. 58Prosjektering og igangsetting i PLC-redigeringsprogrammet .............................. 58
RRS485-grensesnitt COM1 .................................. 13
SSikkerhetsmerknader
Applikasjon med løfteanordning .................... 7Avfallshåndtering ........................................... 7Sikkerhetsfunksjoner ..................................... 7Tilleggsdokumentasjon .................................. 7
Standard gateway .............................................. 37Stille inn IP-adresseparameter ........................... 43
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B
69
8
70
deks
Stille inn IP-adresseparametere via DCP ...........40Første idriftsettelse .......................................40Tilbakestille IP-adresseparametere ..............40
Styring MOVI-PLC® advanced DH.41BBinære inn- og utganger ...............................13Diagnostikkdioder (LED) ..............................13Egenskaper ....................................................9Engineering ....................................................9Enhetsutførelser .............................................9Kommunikasjonsgrensesnitt ..........................9Konfigurering av PROFIBUS- grensesnitt ....12PROFIBUS-overvåkingsfunksjoner ..............12Styringsklasser ...............................................9
Styring MOVI-PLC® advanced DH.41B.RS485-grensesnitt COM1 ............................13
Styring MOVI-PLC® advanced DH.41B. automatiseringstopologier ...................................10Subnettmaske .....................................................37
TTCP / IP-adressering og subnett .........................36
IP-adresse ....................................................36Standard gateway ........................................37Subnettmaske ..............................................37
Tekniske data ......................................................61Generelle tekniske data ................................61Kompaktstyring MOVI-PLC® advanced ........65Styring MOVI-PLC® advanced DHE41B ......62Styring MOVI-PLC® advanced DHF41B ......64Styring MOVI-PLC® advanced DHR41B ......65
Tilbakestille IP-adresseparametere ....................40Tilkobling av binære inn- og utganger (plugg X31) til MOVI-PLC® advanced DHE41B ..17Tilkobling av PROFIBUS (plugg X30P) til MOVI-PLC® advanced DHF41B .........................26Tilkobling av RS485-grensesnitt (plugg X34) til MOVI-PLC® advanced DHE41B .........................19Tilkobling DeviceNet (plugg X30D) for MOVI-PLC® advanced DHF41B .........................27Tilkobling systembuss CAN 2 (plugg X32) / CAN 1 (plugg X33) til MOVI-PLC® advanced DHE41B ..............................................................18Tilleggsdokumentasjon .........................................7
VVidereførende litteratur ........................................ 8Viktig informasjon ................................................. 5
In
Håndbok – Styring MOVI-PLC® advanced DHE41B/DHF41B/DHR41B

SEW-EURODRIVE – Driving the world

Hvordan beveger man verden
Ved å samarbeide medmennesker somtenker raskt og riktig.
Med en service som erinnen rekkekviddeverden over.
Med drifter og styringersom automatiskforbedrer prosessene.
Med en omfattende"know-how" i vår tidsviktigste bransjer.
Med kompromissløskvalitet som med sin høye standard forenklerdet daglige arbeidet.
Med en global tilstede-værelse for raske ogoverbevisende løsninger.
Med innovative ideersom allerede i morgengir løsninger for i over-morgen.
Ved å være på Internettmed 24 timers tilgang tilinformasjon og softwareoppdateringer.
Drivteknikk \ Automatisering \ Systemløsninger \ Service
SEW-EURODRIVEDriving the world
www.sew-eurodrive.no
SEW-EURODRIVE ASSolgaard skog 71, N-1599 Moss/NorwayTlf. +47 69 24 10 20 · Faks +47 69 24 10 [email protected]











