Embed Size (px)
Citation preview

Optimization Theory and
Applications
SupplementalLectureforMathematicalBackground
Prof. Chun-Hung Liu
2016/10/18 Lecture:Supplement 1
Dept. of Electrical and Computer EngineeringNational Chiao Tung University
Fall 2016

2016/10/18 Lecture:Supplement 2
Function Notation• When we write
we mean that f is a function on the set mapping into the set B. Thus the notation means that f maps (some) n-vectors into m-vectors.
domf ✓ Af : Rn ! Rm
• As an example consider the function given byf : Sn ! R
with . The notation specifies the syntax of f: it takes as argument a symmetric matrix, and returns a real number. The notation specifies which symmetric matrices are valid input arguments for f (i.e., only positive definite ones).
domf = S
n++ f : Sn ! R
n⇥ nn⇥ n
domf = S
n++

2016/10/18 Lecture:Supplement 3
Gradient, Jacobian, Hessian
• A gradient is the derivative of a scalar with respect to a vector.
rx
f(x) =
f(x) = 2x1x2 + x
22 + x1x
23• Example: if then its gradient is
rx
f(x) =

2016/10/18 Lecture:Supplement 4
• A Jacobian is a the derivative of a vector with respect to a transposed vector.
Gradient, Jacobian, Hessian
• Example: If we have the function
then its Jacobian is
, f(x) = [f1(x), f2(x), . . . , fk(x)]

2016/10/18 Lecture:Supplement 5
Gradient, Jacobian, Hessian
• The Hessian is derivative of a Gradient with respect to a transposed vector.
r2x
f(x) =
Recall that our above Gradient is
The Hessian is

2016/10/18 Lecture:Supplement 6
Trace Derivative of Matrix• If and , then X 2 Rn⇥m f(Y) = tr(Y)
@f(Y)
@X=
where is what we put in the ijth place in our derivative matrix.@tr(Y)
@xij
Thus,
because is what we put in the jith place in our derivative matrix.
@tr(Y)
@xji

2016/10/19 Lecture:Supplement 7
Product Rule for Vector and Matrix
• Suppose u(x) and v(x) are scalar functions of x. Recall from your Calculus class, you must see the following product rule:
• Now, we want to translate this to matrices and traces of matrices:
• If we take the derivative of the matrix product with respect to a scalar:

2016/10/19 Lecture:Supplement 8
Then we find that the i,jth place in our new derivative matrix is
Product Rule for Vector and Matrix
• Since the picked elements is arbitrary, we can generalize:

2016/10/19 Lecture:Supplement 9
Chain Rule for Vector and Matrix• Let us first see an example. Suppose
Now if

2016/10/19 Lecture:Supplement 10
Chain Rule for Vector and MatrixBut, we know
So, another way of getting the same result:
• In other words, if then f : Rn ! R
df(x) =nX
i=1
@f(x)
@xi· @xi
@t
dt = rf(x)T@x
@t
dt

2016/10/19 Lecture:Supplement 11
Directional Derivative of Vectors
• The standard derivative definition:
• In vector calculus, we have the directional derivative defined as
• Now, our function is a surface (a scalar function of as many dimensional inputs as there are elements in x), so the derivative will change at a multidimensional point x based on the direction we travel from that point.
• Think of what happens if you were to stand on a mountain and turn around in a circle: in some directions, the slope will be very steep (and you might fall off the mountain), but in other directions, there will barely be any slope at all.

2016/10/19 Lecture:Supplement 12
Directional Derivative of Vectors • Actually, we can write
Dw
f(x) = w
T @f(x)
@x= w
Trx
f(x)
• Example: Let . Find f(x) = x
TQx r
x
f(x) =?
= w
TQx+ x
TQw + limt!0
twTQw
Dwf(x) = limt!0
f(x+ tw)
t= lim
t!0
(x+ tw)TQ(x+ tw)� x
TQx
t
= 2wTQx
rx
f(x) = Qx
r2x
f(x) = Q

2016/10/19 Lecture:Supplement 13
Table of Gradients • For , and , we have the following x 2 Rn A 2 Rm⇥n b 2 Rm

2016/10/19 Lecture:Supplement 14
Table of Gradients • For , we have the following x, a, b 2 Rn

2016/10/19 Lecture:Supplement 15
• Now we can extend our directional derivative definition to matrices
where Y is a matrix with the same dimension as X.
• Similarly, we have
(We ca use this definition to find )
tr
✓YT @f(X)
@X
◆
@f(X)
@X
Directional Derivative of Matrices

2016/10/19 Lecture:Supplement 16
Directional Derivative of Matrices • Example: Suppose and we want to find
= ?
By definition, we know

2016/10/19 Lecture:Supplement 17
Directional Derivative of Matrices • So we can have
= tr(Y TAT ) = tr
✓Y T @f(X)
@X
◆
= AT
• Example: Let . Find @f(X)
@X=?

2016/10/19 Lecture:Supplement 18
Directional Derivative of Matrices
(Because )tr(UV ) = tr(V U)

2016/10/19 Lecture:Supplement 19
Directional Derivative of Matrices

2016/10/19 Lecture:Supplement 20
Directional Derivative of Vectors
• Example: Consider the function and . f(X) = log det(X)
f : Sn++ ! R
• One (tedious) way to find the gradient of f is to follow the direction derivative introduced in above. Instead, we will directly find the first-order approximation of f at .
• Let be close to X, and let (which is assumed to be small). Thus we have
Now we would like to show .
X 2 Sn++
Z 2 Sn++ �X = Z �X
where is the ith eigenvalue of�i X�1/2�XX�1/2
rf(X) = X�1

2016/10/19 Lecture:Supplement 21
Directional Derivative of Vectors • Now we use the fact that is small, which implies are small, so to
first order we have . Using this first-order approximation in the expression above, we get
�X �i
log(1 + �i) ⇡ �i
Thus, the first-order approximation of f at X is the affine function of Zgiven by
Noting that the second term on the right hand side is the standard inner product of and Z-X . So we can identify as the gradient of f at X.X�1 X�1

2016/10/19 Lecture:Supplement 22
Table of Gradients
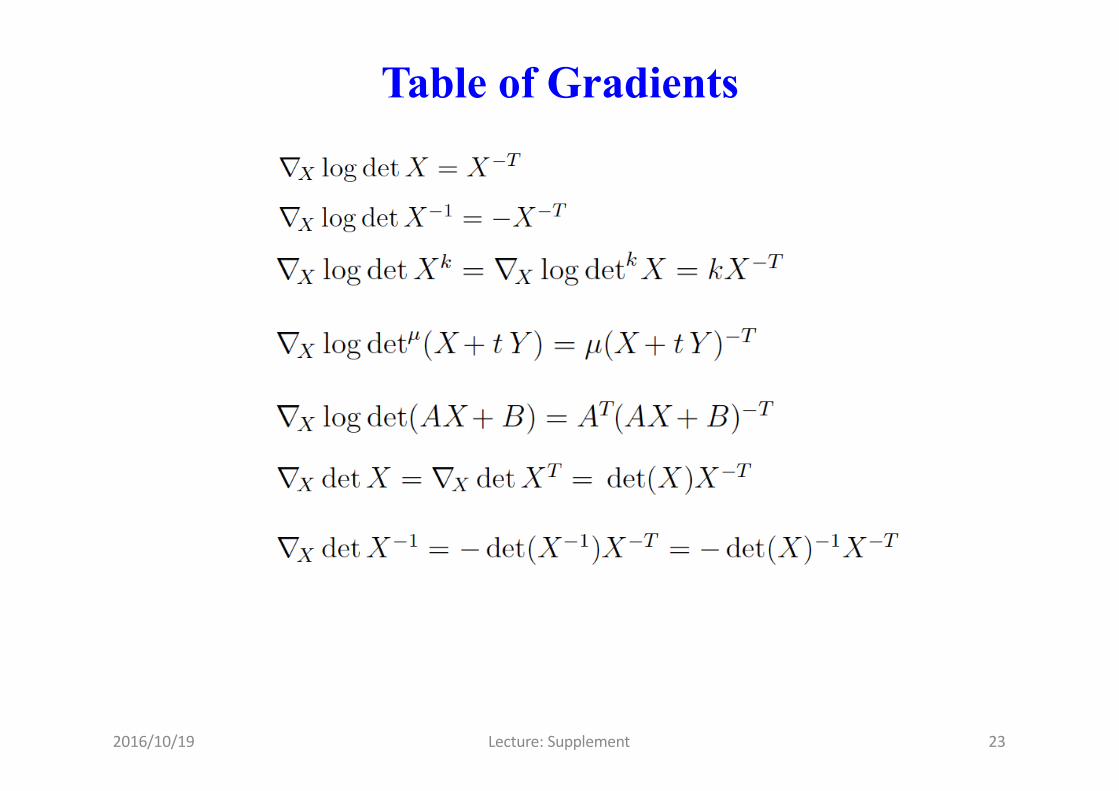
2016/10/19 Lecture:Supplement 23
Table of Gradients

2016/10/18 Lecture:Supplement 24
Symmetric Eigenvalue Decomposition
• Suppose , i.e., A is a real symmetric matrix. Then A can be factored as
A 2 Sn n⇥ n
where is an orthogonal matrix (or called unitary matrix), i.e., satisfies , and . The (real) numbers are the eigenvalues of A, The columns of Q form an orthonormal set ofeigenvectors of A.
QTQ = I ⇤ = diag(�1, . . . ,�n) �i
• The determinant and trace can be expressed in terms of the eigenvalues,
as can the spectral and Frobenius norms,

2016/10/18 Lecture:Supplement 25
Definiteness and Matrix Inequalities• The largest and smallest eigenvalues satisfy
In particular, for any x, we have
• A matrix is called positive definite if for all , . We denote this as . By the inequality above, we see that if and only all its eigenvalues are positive, i.e., . We use to denote the set of positive definite matrices in .
A 2 Snx 6= 0
x
TAx > 0
A � 0 A � 0�min(A) > 0 Sn
++
Sn
• For , we use to mean , and so on.A,B 2 Sn A � B B �A � 0

2016/10/18 Lecture:Supplement 26
Singular Value Decomposition (SVD)• Symmetric squareroot: Let , with eigenvalue decomposition
. We define the (symmetric) squareroot of A as
A 2 Sn+
The squareroot is the unique symmetric positive semidefinite solution of the equation .
A1/2
X2 = A
• Suppose with . Then A can be factored asA 2 Rm⇥n rankA = r
(SVD)

2016/10/18 Lecture:Supplement 27
Definiteness and Matrix Inequalities• The columns of U are called left singular vectors of A, the columns
of V are right singular vectors, and the numbers are the singular values. The singular value decomposition can be written
�i
where are the left singular vectors, and are the right singular vectors.
ui 2 Rm vi 2 Rn
• The singular value decomposition of a matrix A is closely related to the eigenvalue decomposition of the (symmetric, nonnegative definite) matrix . So we can writeATA
So we conclude that its nonzero eigenvalues are the singular values of Asquared, and the associated eigenvectors of are the right singular vectors of A.
ATA

2016/10/18 Lecture:Supplement 28
Pseudo-inverse of Matrices• Let be the singular value decomposition of
with with rank A=r. We define the pseudo-inverse or Moore-Penrose inverse of A as
A = U⌃V T A 2 Rm⇥n
• If , then . If , then. If A is square and nonsingular, then .
rankA = n A† = (ATA)�1AT rankA = mA† = AT (AAT )�1 A† = A�1
• The pseudo-inverse comes up in problems involving least-squares, minimum norm, quadratic minimization, and (Euclidean) projection. For example, is a solution of the least-squares problemA†b
When the solution is not unique, gives the solution with minimum(Euclidean) norm.
A†b

2016/10/18 Lecture:Supplement 29
Schur Complement• Consider a matrix partitioned asX 2 Sn
where . If , the matrixA 2 Sn det(A) 6= 0
is called the Schur complement of A in X. Schur complements arise in several contexts, and appear in many important formulas and theorems. For example, we have

2016/10/19 Lecture:Supplement 30
• The Schur complement comes up in solving linear equations, by eliminating one block of variables. For example,
Schur Complement
assuming . Eliminating x from the top block equation and substituting it into the bottom block equation yield
det(A) 6= 0
v = BTA�1u+ Sy y = S�1(v �BTA�1u)
Substituting this into the first equation yields
2016/10/19 Lecture:Supplement 31
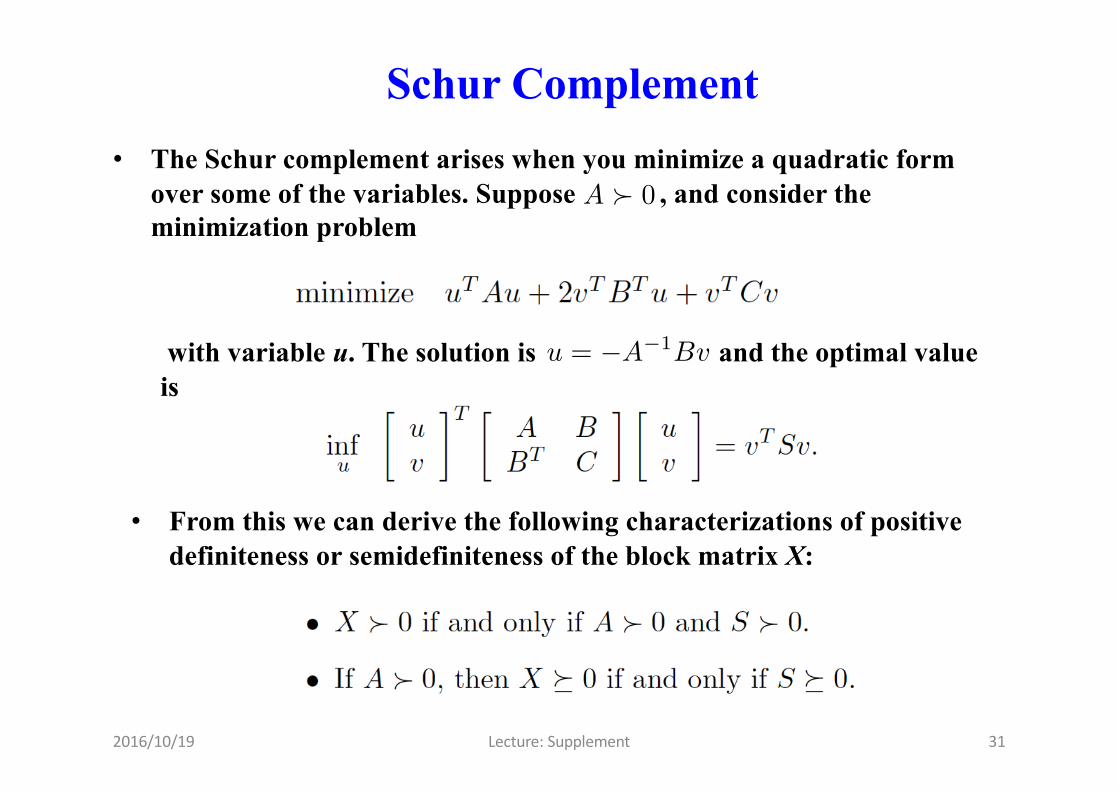
Schur Complement• The Schur complement arises when you minimize a quadratic form
over some of the variables. Suppose , and consider the minimization problem
A � 0
with variable u. The solution is and the optimal value is
u = �A�1Bv
• From this we can derive the following characterizations of positive definiteness or semidefiniteness of the block matrix X:




![Lecture 16 DIRECTIONAL CONTROL VALVE [CONTINUED] 2/Lecture 16.pdf · Lecture 16 DIRECTIONAL CONTROL VALVE [CONTINUED] 1.7.1 2/2-Way DCV (Normally Closed) Figure 1.7shows a two-way](https://img.pdfslide.net/doc/110x75/5b5ad0cf7f8b9a01748cb5d1/lecture-16-directional-control-valve-continued-2lecture-16pdf-lecture-16.jpg)









![directional coupler [호환 모드] - High-Speed Circuits ...tera.yonsei.ac.kr/class/2014_1_2/lecture/directional...Yonsei University Page 5/20 What is directional coupler (DC) P in](https://img.pdfslide.net/doc/110x75/5aa367bb7f8b9a1f6d8e835a/directional-coupler-high-speed-circuits-tera-university-page.jpg)














