-
robotics.sciencemag.org/cgi/content/full/4/27/eaau9924/DC1
Supplementary Materials for
Restoring tactile sensations via neural interfaces for real-time
force-and-slippage
closed-loop control of bionic hands
Loredana Zollo*, Giovanni Di Pino, Anna L. Ciancio, Federico
Ranieri, Francesca Cordella, Cosimo Gentile, Emiliano Noce, Rocco
A. Romeo, Alberto Dellacasa Bellingegni, Gianluca Vadalà, Sandra
Miccinilli, Alessandro Mioli,
Lorenzo Diaz-Balzani, Marco Bravi, Klaus-P. Hoffmann, Andreas
Schneider, Luca Denaro, Angelo Davalli, Emanuele Gruppioni, Rinaldo
Sacchetti, Simona Castellano, Vincenzo Di Lazzaro, Silvia
Sterzi,
Vincenzo Denaro, Eugenio Guglielmelli
*Corresponding author. Email: [email protected]
Published 20 February 2019, Sci. Robot. 4, eaau9924 (2019) DOI:
10.1126/scirobotics.aau9924
The PDF file includes:
Materials and Methods Fig. S1. Median and ulnar nerve. Fig. S2.
Intraneural electrode sutured to epineurium. Fig. S3. Cuff
electrode. Fig. S4. Percutaneous cables. Fig. S5. Threshold charge
over 11 weeks in the thumb, index, and middle fingers. Fig. S6.
Classification performance of the EMG pattern recognition
algorithm. Fig. S7. Real-time force-and-slippage closed-loop
control of a power grasp. Table S1. Percept qualities evoked by
electrical stimulation of the cuff electrode on median nerve before
T0. Table S2. Percept qualities evoked by electrical stimulation of
the cuff electrode on ulnar nerve before T0. Table S3. Percept
qualities evoked by electrical stimulation of the ds-FILE
intraneural electrode on median nerve before T0. Table S4. Percept
qualities evoked by electrical stimulation of the ds-FILE
intraneural electrode on median nerve after T0.
Other Supplementary Material for this manuscript includes the
following: (available at
robotics.sciencemag.org/cgi/content/full/4/27/eaau9924/DC1)
Movie S1 (.mp4 format). Restoring tactile sensations.
-
Supplementary Material
Materials and Methods
Surgery
Surgery was conducted under general anesthesia, in supine
decubitus using an arm table.
The overall procedure lasted about four hours, while the net
surgical implant took almost two hours.
Antibiotic prophylaxis was administered following the hospital
protocol for infection prevention. A
medial approach to the neurovascular bundle was performed,
following the medial edge of the
biceps muscle for about 12 cm distally, to obtain sufficient
space to introduce the electrodes and
avoid possible conflicting interactions. After careful smooth
dissection ulnar and median nerve
were isolated and exposed for about 5 centimeters (Fig. S1). A
microsurgical epineural dissection
was performed using a surgical microscope (Opmi Vario/NC33,
Zeiss). Two intraneural electrodes
(ds-FILEs) were introduced in each of the two main motor nerves
for hand and finger flexion
(medial and ulnar nerve trunks), achieving a total of 64
channels opened toward the nerves. The
intraneural electrodes were introduced using a dedicated needle
at 45 degrees to the nerve axis, and
pulled inside the nerve, in order to reach the widest contact
with nerve fascicles as possible. Then,
the electrodes were sutured onto the epineurium through
dedicated slots, using a 8.0 nylon suture
(Fig. S2). In order to minimize the mechanical stress on the
electrodes, the ceramic connector was
anchored to contiguous fascial tissues. Furthermore, two
epineural electrodes (“cuff electrodes”)
were wrapped around each nerve and sutured using a 8.0 nylon
suture (Fig. S3) proximally
compared to the intraneural electrodes. By tunneling the
subcutaneous tissue, the cables connected
to the electrodes passed the skin through 4 different holes on
the anterior aspect of the arm,
avoiding the skin grafting. Moreover, to avoid any accidental
traction to the cables, two loops were
arranged along the cable, one inside and one outside the skin
surface, then anchored to the skin (Fig.
S4).
Eleven weeks after the implantation, the same procedure was
carried out and all the
electrodes were removed.
Mapping of elicited sensations
In the sensory mapping the stimulation waveform was a train of
cathodic rectangular biphasic
pulses with a fixed frequency of 50 Hz. The pulse amplitude and
the pulse width were set to fixed
values, progressively modified in order to identify all the
sensations elicited in the subject by the
electrical stimulation.
The participant was instructed to report quality, location and
intensity of the perceived sensation on
a custom-developed platform with a computer interface. This has
been ad-hoc developed to help the
subject take note about the reported sensation. The quality was
assessed using the following
options: touch/pressure, vibration, tingling, pinch, pain, cold,
hot, finger extension, finger flexion,
wrist extension and wrist flexion (Tables S1-S4). The location
of the sensation was indicated by the
patient using two picture boxes representing the frontal and
dorsal side of the hand. Moreover, the
intensity and/or the pain of the perceived sensation were
reported in a scale from 0 to 10.
-
The minimum threshold to elicit perceived sensations on the hand
was monitored during the eleven
weeks of the experiment and was identified by slowly increasing
the intensity of the stimulation of
intraneural and cuff electrodes. The minimum stimulation charge
on intraneural electrodes ranged
from 7 nC to 86 nC in eleven weeks, significantly lower than
threshold recorded for cuff electrodes
in the same period. Cuff on median and ulnar nerves varied their
charges from 60 nC to 240 nC and
from 120 nC to 150 respectively. The injected charges adopted in
this study for intrafascicular and
cuff electrodes were consistent with the charges used in
previous studies and involving the same
types of electrodes (7) (12) (13).
Force and slippage sensations were provided to contacts number
10, 12, 16 of the intraneural
electrode in the median nerve that the subject referred to map
on the thumb, index and middle
fingers. Minimum threshold tracking of these channels over the
eleven weeks of experimental study
is shown in Fig. S5. The sensory stimulation threshold of
channel 16 slightly increased during time
from 7 nC to 36 nC. For channel 12, the minimum threshold
changed from 19 nC to 86 nC, while
the minimum injected charge of channel 10 increased with days
ranging from 19 nC to 41 nC.
Validation of the multifingered stick-slip model
Ten healthy subjects (seven males and three females, mean age
(±s.d.): 36±4 years) volunteered to
participate in this study and provided written informed consent.
All the participants received
detailed instructions and familiarized with tasks before
starting the acquisitions. They were
comfortably seated at a desk with the arm sustained by a
support.
The blindfolded and acoustically shielded subjects were asked to
grasp an object placed close to the
fingers and lift it. Ten repetitions of a power grasp and ten
repetitions of a tridigital grasp per
subject were performed. For the power grasp an object with a
parallelepipedal shape and a weight
of 0.25 kg was adopted; for the tridigital grasp, an object with
a parallelepipedal shape and a weight
of 0.050 kg was used. The objects were equipped with
force-sensing resistors for recording the
applied normal forces and reflective markers for monitoring the
object displacement by means of
BTS Smart-D optoelectronic system. One marker was placed at the
upper extremity and two
markers were at the lower extremity of the object. Moreover, a
magneto-inertial unit (MTw-
38A70420 Xsens Technologies B.V.) was located at the top of the
object to record object
acceleration and orientation.
In order to generate a repeatable perturbation (i.e. Fs in the
model), an additional mass was linked to
the object and released when the object was lifted by the
subject. For the power grasp, the
additional mass was of the same weight of the object, while for
the tridigital grasp the mass was
twice the object weight. The weight of the additional masses was
empirically chosen to be sure to
induce slippage and obtain an observable object
displacement.
The same experimental setup and the same experimental conditions
were reproduced with the
amputee participant for the experiment of force-and-slippage
closed-loop control with neural
feedback.
-
Grasp assessment
The weighted success is a normalized measure of the task success
rate and is expressed as the task success modulated byby the number
of occurred slippage events and normalized over the maximum
number of slip events detected with the same feedback condition.
It is computed as
𝑠𝑢𝑐𝑐𝑒𝑠𝑠𝑤𝑒𝑖𝑔ℎ𝑡 = 𝑠𝑢𝑐𝑐𝑒𝑠𝑠 (1 −𝑠𝑙𝑖𝑝𝑝𝑎𝑔𝑒
𝑠𝑙𝑖𝑝𝑝𝑎𝑔𝑒𝑚𝑎𝑥)
where:
𝑠𝑢𝑐𝑐𝑒𝑠𝑠 is a binary value that can assume value 1 when the trial
is successfully performed, and value 0 when the trial fails;
𝑠𝑙𝑖𝑝𝑝𝑎𝑔𝑒
𝑠𝑙𝑖𝑝𝑝𝑎𝑔𝑒𝑚𝑎𝑥 is the number of slip events detected during the
trial; it is normalized by the
maximum number of slip events detected in all the trials and
performed in the same sensory
feedback condition (i.e. with neural feedback, or without
feedback).
Therefore, the 𝑠𝑢𝑐𝑐𝑒𝑠𝑠𝑤𝑒𝑖𝑔ℎ𝑡 ranges in the interval [0, 1],
where 0 is obtained when the trial fails,
while 1 is obtained when the trial is successfully performed
with no slippages. In between, the
success index is weighted with slippage and decreases as the
number of slippages increases.
The force index, expressed in Newton, measures the total force
applied by the fingers involved in the grasping or manipulation
task. The force signal is segmented between the time instant
where
the force exceeded a threshold of 2% of the peak force and the
time instant where the force dropped
below the same threshold. Force index 𝐹𝑖 is evaluated as
𝐹𝑖 = ∑ 𝐹𝑚𝑒𝑎𝑛𝑖𝑘𝑖=1
where 𝐹𝑖 is the mean value of the force for finger 𝑖, and 𝑘 can
vary from 2 to 5, depending on
the number of fingers involved in the task
The execution time is the time employed for performing the task,
elapsed from the trial onset and termination triggered by the
experimenters.
Data analysis and statistics
A statistical analysis based on Friedman non-parametric tests
with Wilcoxon post-hoc test and
Bonferroni correction (p< 0.016) was applied for multiple
comparisons of the weighted success at
T0, T1 and T2. A Wilcoxon Signed-Rank test was used to compare
grasp performance in the two
conditions of neural feedback and no feedback, with significance
threshold set to 0.05.
Neurophysiological assessment
Assessment of nerve motor fiber excitability
Motor fiber activation after stimulation by the implanted
electrodes was assessed by recording
electromyographic (EMG) responses from muscles of the median and
ulnar innervation territories:
-
anterior forearm muscles (wrist flexors) and flexor carpi
ulnaris muscle were chosen to test median
and ulnar nerve excitability, respectively. Increasing
stimulation intensities up to 400 uA (stimulus
duration: 80 us) were used with contacts of the median dsFILE
electrodes and up to 1000 uA
(stimulus duration: 200 us) with contacts of median and ulnar
cuff electrodes.
Assessment of motor cortical excitability
The excitability of the primary motor cortex (M1) was assessed
by single pulse transcranial
magnetic stimulation (TMS), delivered through a Magstim 2002
magnetic stimulator (The Magstim
Company Ltd, Whitland, Carmarthenshire, UK) generating a
monophasic magnetic pulse. The
stimulator was connected to a figure-of-eight coil with an
external diameter of 9 cm, held over the
right motor cortex at the optimum scalp position to elicit EMG
responses in the contralateral arm
and forearm muscles. The induced current flowed in a
posterior-to-anterior direction across the
central sulcus.
Recording of muscle evoked responses
Muscle evoked potentials, by either TMS or nerve stimulation,
were recorded using 9 mm diameter
Ag-AgCl surface EMG electrodes, with the active electrode over
the motor point of the muscle and
the reference placed distally on the surface of the ulnar bone
(for forearm muscles) or over the
tendon of the biceps brachialis muscle at the elbow. The signal
was amplified and filtered (gain:
1000; bandwidth: 3-3000 Hz) by a Digitimer D360 amplifier
(Digitimer, Welwyn Garden City, UK)
and stored on a computer with a sampling rate of 5 KHz using a
CED 1401 A/D converter
(Cambridge Electronic Design, Cambridge, UK).
-
Supplementary Figures and Tables
Surgery
Fig. S1. Median and ulnar nerve.
Fig. S2. Intraneural electrode sutured to epineurium.
-
Fig. S3. Cuff electrode.
Fig. S4. Percutaneous cables.
-
Mapping of elicited sensations
Fig. S5. Threshold charge over 11 weeks in the thumb, index, and
middle fingers. The thresholds
corresponded to the minimal sensations reported by the subject
stimulating the channels of ds-FILE
intraneural electrode implanted in median nerve.
Table S1. Percept qualities evoked by electrical stimulation of
the cuff electrode on median nerve
before T0. The number of trials evoking intensity level, quality
and perceived area is shown. An intensity
level “0” indicates a stimulus not perceived by the patient.
Table S2. Percept qualities evoked by electrical stimulation of
the cuff electrode on ulnar nerve before
T0. The number of trials evoking intensity level, quality and
perceived area is shown. An intensity level “0”
indicates a stimulus not perceived by the patient.
-
Table S3. Percept qualities evoked by electrical stimulation of
the ds-FILE intraneural electrode on
median nerve before T0. The number of trials evoking intensity
level, quality and perceived area is shown.
An intensity level “0” indicates a stimulus not perceived by the
patient.
Table S4. Percept qualities evoked by electrical stimulation of
the ds-FILE intraneural electrode on
median nerve after T0. The number of trials evoking intensity
level, quality and perceived area is shown.
An intensity level “0” indicates a stimulus not perceived by the
patient.
-
Myoelectric control
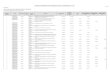
Fig. S6. Classification performance of the EMG pattern
recognition algorithm. (A) Confusion matrix
indicating 99.3% mean accuracy for selected gestures. Main
diagonal shows accuracy for each class (rest,
power, pinch, open and lateral). (B) Classification performance
expressed through the F1Score for each
class, mean F1Score and mean accuracy
-
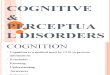
Real-time force-and-slippage closed-loop control
Fig. S7. Real-time force-and-slippage closed-loop control of a
power grasp. (A) With neural feedback.
The participant performed a power grasp: the power gesture was
selected by the EMG classifier and all the
fingers stared moving. Once the object was touched, force
feedback was provided. The first slippage event
was felt by the participant, who actively tuned the level of
force by producing a variation in the EMG signal.
After an additional correction of the force, due to a latter
slippage event, grasp stability was reached up to the
-
end of the trial. Hence, the open hand gesture was classified
and the hand re-opened. (B) Without feedback.
The participant performed a power grasp: the power gesture was
selected by the EMG classifier and all the
fingers stared moving. Once the object was touched, the applied
force was measured and slippage was
detected by the sensors. There was no stimulation. The patient
was not able to feel the detected slippage
event, however the grasp was stable and the object does not
fall. At the end of the trial, the open hand gesture
was classified and the hand re-opened. All the traces are
normalized with respect to the maximum time
duration.