Embed Size (px)
Citation preview

Surge Decay Simulations of a Semi-Submersible Floating Offshore WindTurbine
Simon Burmester∗, Sebastien Gueydon†, Guilherme Vaz†, and Bettar el Moctar∗∗University Duisburg-Essen, Duisburg/Germany, †MARIN (Maritime Research Institute Netherlands),
Wageningen/The [email protected]
1 Introduction
The state of the art to simulate the dynamic behaviour of floating wind turbines is to use Blade ElementMomentum Theory (BEMT) for the aerodynamics and potential flow based tools for the hydrodynamics,see Cordle and Jonkman (2011) and Robertson et al. (2017). These methods are often used in the analy-sis and design of FOWTs.The OC5 (Offshore Code Comparison, Collaboration, Continued, with Correlation) project was focusedon the validation of numerical simulations of the DeepCwind semi-submersible floating wind turbinewith experimental data obtained from physical tests performed at the facilities of MARIN. The resultswill be presented shortly in Robertson et al. (2017).In this paper the focus lies on the prediction of the hydrodynamic damping for surge motion. It is as-sumed that the hydrodynamic damping consists of wave radiation damping, viscous damping and drag ofthe mooring lines. The viscous damping cannot be predicted by potential flow based methods. On thesegrounds, the viscous flow solver ReFRESCO (http://www.refresco.org/) is used to simulatethe surge decay test of the OC5 semi-submersible floating wind turbine. There are many mooring modelsavailable with lots of different properties, see e.g. Davidson and Ringwood (2017). Dynamic mooringmodels are needed to account for the drag of the mooring lines moving in water. For this work the moor-ings are considered with a linear stiffness matrix in the equations of motion, i.e. no drag of the mooringlines is considered in the current study. Nevertheless, several surge decay simulations are performed tounderstand the effects of scaling and wave radiation on the hydrodynamic damping. Numerical resultsare compared with the above mentioned experimental data.
2 Description of Model Tests
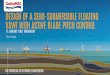
For the model tests conducted at 1/50th scale a semi-submersible floater was utilized that was originallydeveloped within the DeepCwind consortium (Robertson et al. (2017)). The model tests conducted in2013 used this floater with a performance-matched wind turbine, the so-called MARIN Stock Wind Tur-bine (MSWT), mounted on top. Information about this turbine can be found in de Ridder et al. (2014),Martin et al. (2012), Fowler et al. (2013) and Kimball et al. (2014). Since the rotor was not rotating dur-ing the surge decay tests, solely the floater geometry is presented. The geometry is shown in Fig. 1. Thisfigure presents also the coordinate system used for the work. The x coordinate points in forward (surge)direction, the y coordinate in transfers (sway) direction, and the z coordinate vertically upwards resultingin a right-handed coordinate system. The system’s origin is set to the centre of gravity of the floatingstructure. The semi-submersible consists of three vertical columns placed in a triangular arrangementaround the main column in the middle. These three columns possess heave damping plates at the bottomand are connected horizontally with pontoons and diagonally with cross braces to the other vertical ele-ments.The properties of the system investigated (floater, tower and rotor) are summarized in Tab. 1. The diag-onal values of the linear restoring matrix are applied as listed in Tab. 2. More details can be found inRobertson et al. (2017).
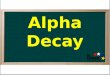
To analyse the hydrodynamic damping the P-Q method of van der Vegt (1984) is used. This P-Qanalysis uses successive amplitudes to determine the relative decrement of the decay test. A line can befitted through these data points to obtain the intercept (p-value) and the slope (q-value) (see Fig. 2). InFig. 2 the decrement of motion amplitude as a function of the mean motion amplitude is plotted for the

Fig. 1: Drawing of the OC5 DeepCwind semi-submersible, adopted from Gueydon (2015).
Designation Full scale value
Draft 20.0 mMass 1.3958 · 107 kgCentre of Gravity above keel 11.93 mRoll radius of gyration 32.63 mPitch radius of gyration 33.38 mYaw radius of gyration 31.32 m
Table 1: Main particulars of the floating structure at full scale.
model tests. The linear B1 and quadratic damping coefficients B2 can be obtained as follows:
B1 = p ·Tn ·C2π2 , B2 = 3q ·
T 2n ·C
32π2 . (1)
Here, the natural period is denoted by Tn and the stiffness coefficient by C. This method is used tocompare the hydrodynamic damping obtained by the experiments and numerical simulations.
3 Methods
For the numerical simulations, the RANS based CFD code ReFRESCO is used. ReFRESCO is a com-munity based open-usage CFD code for the Maritime World (http://www.refresco.org/). Thecode solves multiphase (unsteady) incompressible viscous flows using the Navier-Stokes equations, com-plemented with turbulence models, cavitation models and volume-fraction transport equations for differ-ent phases, see Vaz et al. (2009). The equations are discretized using a finite-volume approach with cell-centered collocated variables, in strong-conservation form, and a pressure-correction equation based onthe SIMPLE algorithm is used to ensure mass conservation, see Klaij and Vuik (2013). Time integrationis performed implicitly with a second-order backward scheme. The code is parallelized using MPI andsubdomain decomposition, and runs on Linux workstations and HPC clusters.The implementation is face-based, which permits grids with elements consisting of an arbitrary numberof faces, and if needed h-refinement (hanging nodes). State-of-the-art CFD features such as moving, slid-ing and deforming grids, as well as automatic grid adaption are also available. Coupling with structuralequations-of-motion is also possible and done for this work.The equations of motion for a rigid body enables the description of this body’s attitude to external loads,see Rosetti and Vaz (2017). The considered external loads are the hydrodynamic force FH , the restoringforce FC and the linear viscous mechanical damping force FB. With a state vector for three degrees-of-

Designation Full scale value
Surge 8.46 · 104 N/mSway 7.35 · 104 N/mHeave 1.94 · 104 N/mRoll 7.63 · 108 Nm/radPitch 1.06 · 109 Nm/radYaw 1.198 · 108 Nm/rad
Table 2: Stiffness properties to account for mooring line restoring forces at full scale; the values are givenwith respect to the centre of gravity.
(a) History of surge motion. (b) PQ-analysis for surge decay; Φ are the oscillation am-plitudes.
Fig. 2: Example of a PQ analysis using the experimental data.
freedom r = {XG,ZG,ΘG}T the dynamic equations are written to:
Mr + Br + Cr = FH . (2)
In this equation M denotes the mass, B the damping and C the stiffness matrix. The matrices are positiveand diagonal. As the body is assumed totally rigid, the mechanical damping matrix is set to ’zero’ forall entries. Together these equations form a second-order non-linear initial value problem. The problemis non-linear because the hydrodynamic forces, FH , keep a non-linear relation with r, which evidentlycannot be explicitly derived as they are obtained through the solution of the Navier-Stokes equations.In the present work, a strongly coupled scheme is applied to avoid numerical instabilities. The schemeis based on the second-order Adams-Bashforth-Mouton scheme, in which the communication betweenflow solution and rigid body system is done at the time loop level with the predictor and at the outer looplevel with an iterative corrector step.
4 Sensitivity study
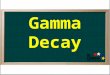
The computational domain used in the numerical simulations is modelled as a semi-cylinder (see Fig.3) in such a way that it forms a symmetric half with respect to the xz plane. This is done to reducecomputational costs compared to a full domain simulation. The size of the domain at full scale is: totalheight of h = 230 m, a water depth of d = 200 m and a radius of r = 245.22 m. The radius corresponds tosix times the radius of the semi-submersible (40.87 m, see Fig. 1). The water depth is adopted from theexperiments.
In Fig. 3 the computational domain with the corresponding boundaries is shown. At the bottom andtop of the domain a static pressure is prescribed. The boundaries of the semi-submersible are represented

Fig. 3: Computational domain at model scale.
with no-slip conditions. For the xz plane a symmetry condition is used. The curved surface area is mod-elled as a non-reflecting boundary condition of Sommerfeld type, see Sommerfeld (1949).The numerical settings used for the equations are shown in Tab. 3.
Equation Preconditioner Solver Convection discretization scheme
Momentum JACOBI GMRES QUICKPressure BJACOBI CG -Free Surface BJACOBI GMRES ReFRICSTurb. model BJACOBI GMRES 1st Order UPWIND
Table 3: Numerical settings used.
The applied turbulence model is the KSKL (K-√
KL) turbulence model, see Menter and Egorov (2010).
To investigate the influence of the grid and time step size on the solution, a sensitivity study is per-formed using three degrees-of-freedom (dofs) simulations for surge decay. This means that the structureis displaced initially in x direction, but can move freely in z and around y axis.The computational domain and grid are generated using Hexpress, a trimmed hexahedral unstructuredgrid generator software from Numeca (http://www.numeca.com/product/hexpress). Anexample for the grid topology used is shown in Fig. 4. For visualization purposes the coarse grid isdisplayed without viscous layer cells. The grids are refined towards the semi-submersible and towardsthe free surface. To avoid hanging nodes in z direction, the refinement at the free surface is kept constantin vertical direction. An internal surface is defined at the location of the free surface. This internal surfacehelps to ensure that the cell faces are exactly at the free surface location.In addition, the curves and surfaces of the semi-submersible are refined (see Fig. 5). In this way, thegeometry is resolved better and viscous effects can be better captured. The structure above the water lineis refined as much as needed for snapping purposes, but less than the submerged part. This is done toreduce the total amount of cells. At critical geometrical points such as the connection between the crossbraces, horizontal pontoons and vertical columns more refinement is needed to capture the contour of thegeometry properly.The viscous layer cells are generated to guarantee a non-dimensional wall distance value of y+ < 1. Thisis achieved regardless of the total grid size.
The three grids used for the sensitivity study are summarized in Tab. 4. In this table the initial amountof cells in the three directions are shown. Besides, three different time steps are studied. These time stepsare defined in ratio of the oscillation period T ≈ 110s: T/3200, T/6400 and T/12800. The results of the

(a) Refinement at free surface. (b) Refinement at the yz plane.
Fig. 4: Global grid topology.
(a) Grid refinement on the semi-submersible. (b) Refinement detail at the connection of crossbraces, pontoons and main column.
Fig. 5: Grid refinement on curves and surfaces.

Grid # cells in x # cells in y # cells in z Total amount of cells
G1 48 24 24 2.75MG2 72 36 36 5.6MG3 96 48 48 9.9M
Table 4: Grid study
motion in surge are shown in Fig. 6 on the left. For each simulation the maximum number of outer-loopiterations is fixed to 60. This number lead to iterative convergence of < 10−3 in L2-norm for all equations.The simulations with G1 and coarser time steps obtained slightly larger residuals (< 5 · 10−3).
(a) Time history of surge motion. (b) Numerical uncertainty estimation.
Fig. 6: Results of the numerical sensitivity study.
The differences in surge motion between the simulations are hardly noticeable. Therefore, values foreach simulation of the first maximum are listed in Tab. 5. In addition, a discrepancy in percentage fromthe finest grid and time step for each simulation is presented in the last column. For the first maximum an
Grid Time step as T/x Negative maximum Discrepancy in %
3200 −6.44185 2.10G1 6400 −6.56265 0.27
12800 −6.68499 1.593200 −6.55113 0.44
G2 6400 −6.54077 0.4512800 −6.54902 0.473200 −6.57268 0.11
G3 6400 −6.57739 0.0412800 −6.58022 0.0
Table 5: Negative maximum of first oscillation cycle
uncertainty analysis is performed according to Eca and Hoekstra (2014). The result of this uncertaintyanalysis is presented in Fig. 6 on the right. For this analysis a fitted plane is calculated based on thedata provided. Then, the uncertainty of one point towards the fitted plane can be determined. Based onthis procedure an uncertainty of about 9.5 % of the finest grid and time step is obtained. Inspecting thedata points, it can be seen that the coarsest grid provides outliers, whereas the medium and fine grid arealmost exactly on the fitted plane. An uncertainty of only 0.5 % more is estimated using the mediumgrid and time step than using the finest configuration. Moreover, the difference between the finest, and

the medium grid and time step is of 0.45 %. Therefore, the medium configuration is used for the finalcomputations. This configuration saves a significant amount of computational costs.
5 Results and Discussion
Two double body simulations, one at full scale and one at model scale are used to investigate the influenceof scaling on the viscous damping. In addition, a simulation at model scale with free surface and for onedegree-of-freedom is performed to study the effect of the free surface on the hydrodynamic damping.Finally, a simulation with free surface and for three degrees-of-freedom is done to analyse the influenceof coupled motions on the damping. The results for the different simulations compared to the experimentsare shown in Fig. 7. Since the simulations are not coupled with a catenary mooring model, the weight anddrag of the mooring lines are missing in this simulation. For the 3dof simulation an additional verticalforce is applied to account for this submerged weight of the mooring lines.
Fig. 7: Comparison of surge decay simulations withmodel test.
Simulation Period [s] Damping Coeff.(linear, p) (quadratic, q)
Model test 107.68 0.1372, 0.11075DB at fs 1dof 103.35 0.0, 0.04012DB at ms 1dof 104.05 0.0292, 0.06831dof at ms 103.46 0.1245, 0.05453dof at ms 104.55 0.1234, 0.0573
Table 6: Results of PQ analysis of model testsand CFD simulations
The surge decay motion presented in Fig. 7 can be categorized as ’under damped’ oscillation. Fromthis figure a large difference in oscillation amplitude between the full scale and model scale double bodysimulation can be seen. This difference increases with time. (The PQ-analysis provides the correspond-ing linear and quadratic damping coefficients (see Tab. 5). ) The p and q coefficients in Tab. 5 show asignificant difference in quadratic damping (q) between these two simulations, but also the linear damp-ing increases. The increase of damping can be explained by the larger boundary layer at model scale inrelation to the boundary layer at full scale. In addition, the simulations of the grid at model scale possessy+ values of around one and at full scale y+ values of around 100 are achieved. This means that theboundary layer is better resolved at model scale. Moreover, the PQ analysis of these two simulationsshows that the viscous damping is mainly quadratic.The difference between the 1dof simulation at model scale and the double body simulation at modelscale is the additional free surface. The difference of the oscillation amplitude is hardly noticeable inthe beginning of the simulation. After about 300 s this difference increases. The PQ analysis reveals adramatic increase of linear damping for the simulation with free surface. This supports the hypothesesthat the damping due to wave radiation is a potential damping.The last simulation presented in this paper is a surge decay simulation with enabled heave and pitchmotion. This multi-degrees-of-freedom (3 dof) simulation influences the damping slightly. The quadraticdamping is increased and the linear damping decreased.Comparing this three degrees-of-freedom simulation with the model tests reveals a difference of 10.06 %in linear damping and of 48.26 % in quadratic damping. It shows that the quadratic damping is more

dominant for the model tests than for the numerical simulation. Compared to the model tests, this 3dofcomputation misses the 6dof motion, the drag of the mooring lines, the influence of the connected elec-trical power cable and the possible aerodynamic damping effect of the parked rotor.Each of the numerical simulations is performed with the same structural mass and inertia. Based on theseCFD simulations, the natural period in surge is influenced by the damping.The numerical results shown in Fig. 7 and Tab. 6 possess uncertainties of about 10 %. For the model testresults no uncertainty estimation was done. Therefore, no formal validation is possible.Additionally to the motions of the floater, the velocities around the semi-submersible are studied. In thefigures 8 and 9 the four numerical simulations are presented with full scale values. The velocities in xdirection are shown at the height of the system’s centre of mass. A time instant is chosen shortly afterthe second oscillation amplitude (t = 220 s). Thus, the semi-submersible moves in negative x direction,i.e. to the right of the figures.
(a) Simulation at full scale. (b) Simulation at model scale.
Fig. 8: Velocity in x direction during surge decay motion at t = 220 s for the double body simulations.
(a) One degree-of-freedom simulation. (b) Three degrees-of-freedom simulation.
Fig. 9: Velocity in x direction during surge decay motion at t = 220 s for the free surface simulations.
The magnitude and profile of the velocity component in x is larger at full scale than at model scale.The velocity profile around the cross brace connecting the top right column with the main column is notsymmetric at model scale, which it is at full scale. Thus, at model scale more interaction of the velocitiesin the boundary layer can be observed.The free surface effects the velocity in x direction in particular around the two visible cross braces. Thecross brace in the symmetry plane and in the shadow of the main column is surrounded by negative flowvelocities. The non-symmetric behaviour of the velocities around the cross brace between main and top

right column is more pronounced than for the model scale simulation without free surface. The columnin the top right corner of the figure is located in free stream. The velocities around this column increasewith the influence of the free surface. The velocities around the two large columns decrease for the 3dofsimulation. At the same time the velocities around the smaller elements are almost constant.The increase of linear damping in the numerical simulations seems to be associated with a decreaseof the velocities around the large cylinder on the left of the figures and the rise of the non-symmetricflow pattern around the cross brace. In the same way a connection can be seen between the decrease ofvelocity around the cylinder in free stream and the increase of quadratic damping. To check whether thisconnection is true or just pure coincidence at this slice and time instant more flow patterns need to bestudied.
6 Conclusions
The numerical simulations performed account for viscous, free surface and motion coupling effects upto 3dof. By comparing these simulations with each other and the physical tests, following conclusionsare drawn:
• Grid generation for simulations with the OC5 DeepCwind semi-submersible is not an easy task. Inparticular the refinement around the connection points of pontoons and braces adds a huge amountof cells. These additional cells are not expected to improve the simulation significantly. Therefore,a simplification of these connections are recommended for future investigations.
• Scaling of the semi-submersible FOWT largely effects the viscous damping. This can be explainedby the larger and better resolved boundary layer at model scale. Thus, more drag influences themotion, which increases the viscous effects.
• Viscous damping is observed to be mainly represented by quadratic damping. But it also has alinear contribution at model scale. In contrast wave radiation damping is mainly linear. Hence,the hypotheses can be confirmed that wave radiation damping can be predicted using potentialmethods.
• Coupled motions slightly effect the hydrodynamic damping. However, further investigations in-cluding more degrees-of-freedom are needed to quantify the importance of the degrees-of-freedomused.
• Small differences in the linear damping remain between the numerical simulations and the physicalmodel tests. The quadratic damping is more dominant in the experiments than the computations.This can be explained by limitation of 3dof motions, the missing mooring model and influences ofthe turbine and connected power cable in the numerical simulations.
• The estimated uncertainties of the numerical simulations are of 10 %. No uncertainty estimationwas carried out for the model tests. Thus, no formal validation of the numerical simulations can bedone.
• The flow around the structure is influenced by the different conditions used for the numericalsimulations. A connection can be seen between the flow patterns around the structure and theincrease or decrease of linear and quadratic damping.
The remaining difference in quadratic damping is expected to decrease for simulations accounting forthe drag of the mooring lines and motion coupling of more than three degrees-of-freedom. These twoaspects are planned for further studies.
Acknowledgements
The research leading to these results is also part of the OceaNET project, which has received fundingfrom the European Union’s Seventh Framework Programme for research, technological development anddemonstration under grant agreement no. 607656.

ReferencesA. Cordle and J. Jonkman (2011). State of the Art in Floating Wind Turbine Design Tools. Proceedings of ISOPE2011, Maui, Hawaii, USA.
J. Davidson and J.V. Ringwood (2017). Mathematical Modelling of Mooring Systems for Wave Energy Convert-ers - A Review. Journal of Energies, 2017, 10, 666.
EJ. de Ridder, W. Otto, GJ. Zondervan, F. Huijs, and G. Vaz (2014). Development of a Scaled-Down FloatingWind Turbine for Offshore Basin Testing. Proceeding of OMAE 2014
L. Eca and M. Hoekstra (2014). A procedure for the estimation of the numerical uncertainty of CFD calculationsbased on grid refinement studies. Journal of Computational Physics, 262:104-130.
M.J. Fowler, A.J. Goupee, R. Kimball and D.A. Thomas III (2013). Design and Testing of Scale Model WindTurbines for Use in Wind/Wave Basin Model Tests of Floating Offshore Wind Turbines. Proceeding of OMAE2013
S. Gueydon (2015). Numerical study of OC5 semi - Calibration of hydrodynamic properties. MARIN Report:28503-MSG-1, Wageningen, The Netherlands.
R Kimball, MJ Fowler, AJ Goupee, J Helder , EJ de Ridder (2014). Wind/Wave Basin Verification of aPerformance-Matched Scale-Model Wind Turbine on a Floating Offshore Wind Turbine Platform. Proceedingsof OMAE 2014, San Francisco, California, USA.
C.M. Klaij and C. Vuik (2013). Simple-type Preconditioners for Cell-Centered, Colocated Finite Volume Dis-cretization of Reynolds-Averaged Navier-Stokes Equations. International Journal for Numerical Methods in Flu-ids.
H. Martin, R. Kimball, A. Viselli, and A. Goupee (2012). Methodology for Wind/Wave Basin Testing of FloatingOffshore Wind Turbines. Proceeding of OMAE 2012, Rio de Janeiro, Brazil.
F.R. Menter and Y. Egorov (2010). The Scale-Adaptive Simulation Method for Unsteady Turbulent Flow Predic-tions. Part 1: Theory and Model Description. Flow, Turbulence and Combustion, 85 (1), 113-138.
A.N. Robertson, F. Wendt, J.M. Jonkman, W. Popko, H. Dagher, S. Gueydon, J. Qvist, F. Vittori, E. Uzunoglu, R.Harries, A. Yde, C. Galinos, K. Hermans, J.B. de Vaal, P. Bozonnet, L. Bouy, I. Bayati, R. Bergua, J.G. Fernandez,I.M. Alonso,C.B. Sanchez, H. Shin, S. Oh, C. Molins, and Y. Debruyne (2017). OC5 Project Phase II: Validationof Global Loads of the DeepCwind Floating Semisubmersible Wind Turbine. In Submission to Energy Procedia.Elsevier.
G. Rosetti and G. Vaz (2017). On the Numerical Simulations of Captive, Driven and Freely Moving Cylinder.Accepted for Journal of Fluids and Structures.
A. Sommerfeld (2017). Partial Differential Equations in Physics. Elsevier.
J.J. van der Vegt (1984). Slinger gedrag van schepen. KIVI-Lecture on Seakeeping.
G. Vaz, F. Jaouen, and M. Hoekstra (2009). Free-Surface Viscous Flow Computation - Validation of uRANS codeReFRESCO. Proceedings of OMAE 2009, Honolulu, Hawaii, USA.