Embed Size (px)
Citation preview
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 1
SurgialitySurgialitySurgialitySurgialitySurgialitySurgialitySurgialitySurgialityAndreas Nürnberger, University of California, Berkeley, USA
Email: [email protected]
Arne Radetzky, IUL Softwarehouse AG, Holzkirchen, GermanyEmail: [email protected]
The combination of „surgical“ and „virtuality“ means thecreation of artificial worlds in the computer for training
and planning of surgical interventions.
http://www.surgiality.com/
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 2
EC-project ROBOSCOPEUltrasound-Image-Guided Manipulator-Assisted System for
Minimally Invasive Endo-Neurosurgery
ECEC--projectproject ROBOSCOPEROBOSCOPEUltrasoundUltrasound--ImageImage--GuidedGuided ManipulatorManipulator--AssistedAssisted SystemSystem forfor
MinimallyMinimally IInvasivenvasive EEndondo--NeurosurgeryNeurosurgery
Development of an experimental prototype operating equipment forminimally invasive neurosurgical procedures:
Main requirements:
• Safety
• Lowest possible cost of components
Development and integration of a neuronavigation system including
• Intraoperative real-time 3D ultrasound imaging
• Robotic manipulator arm
• Simulation system
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 3
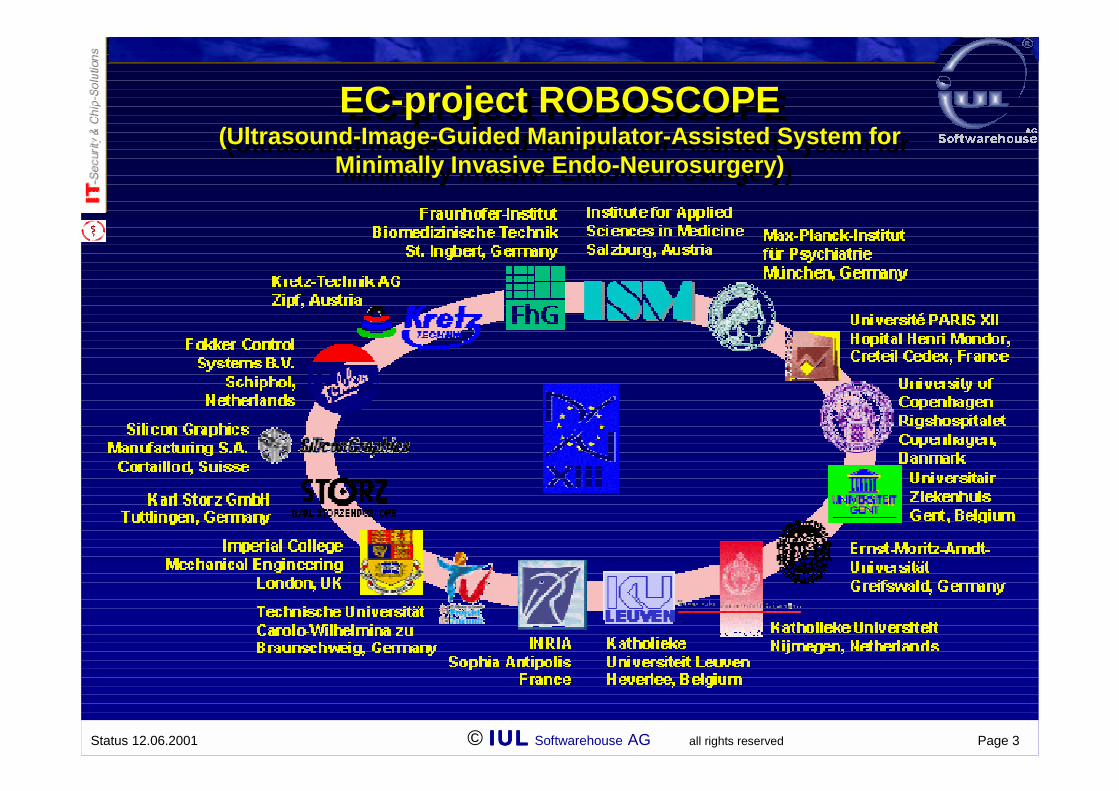
EC-project ROBOSCOPE(Ultrasound-Image-Guided Manipulator-Assisted System for
Minimally Invasive Endo-Neurosurgery)
ECEC--projectproject ROBOSCOPEROBOSCOPE((UltrasoundUltrasound--ImageImage--GuidedGuided ManipulatorManipulator--AssistedAssisted SystemSystem forfor
MinimallyMinimally IInvasivenvasive EEndondo--NeurosurgeryNeurosurgery))
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 4
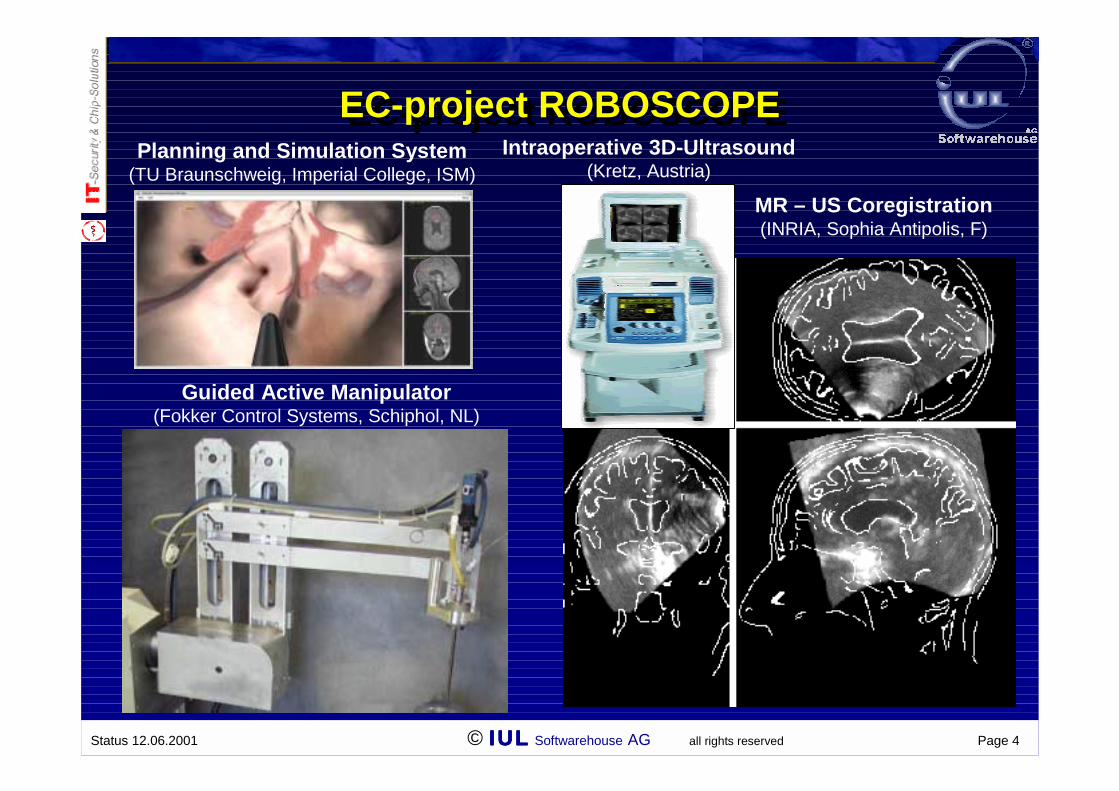
MR – US Coregistration(INRIA, Sophia Antipolis, F)
EC-project ROBOSCOPEECEC--projectproject ROBOSCOPEROBOSCOPE
Guided Active Manipulator(Fokker Control Systems, Schiphol, NL)
Planning and Simulation System(TU Braunschweig, Imperial College, ISM)
Intraoperative 3D-Ultrasound(Kretz, Austria)
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 5
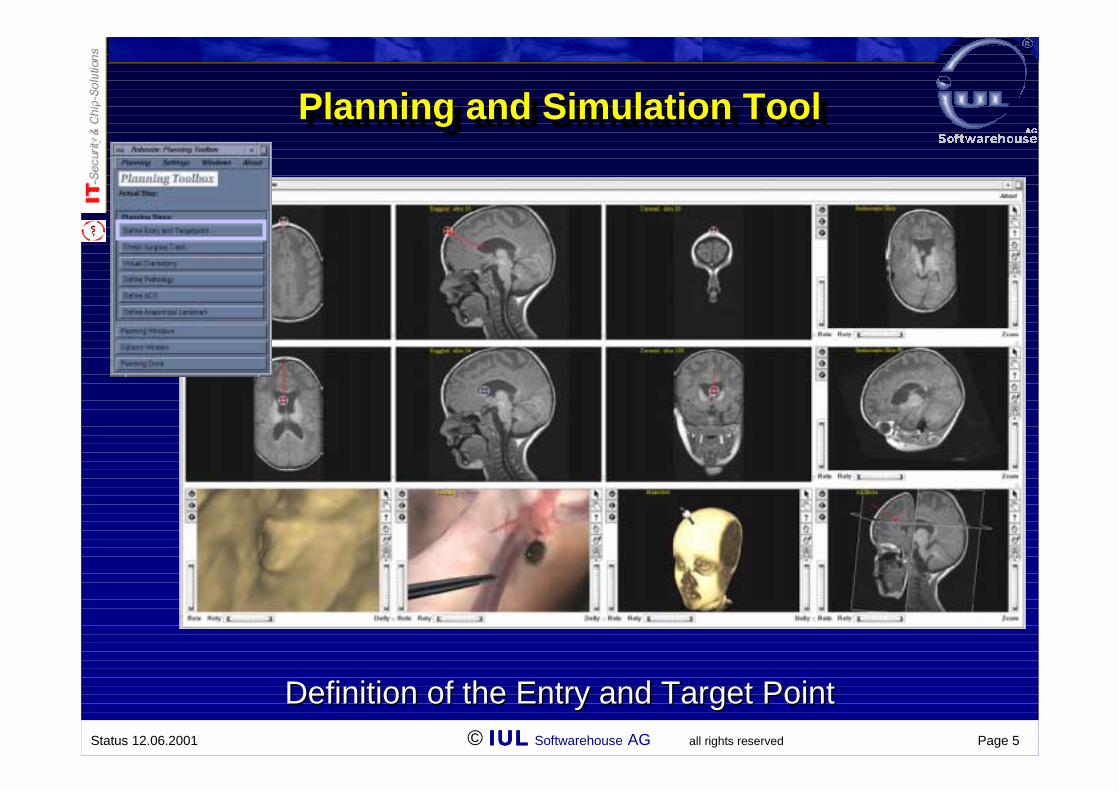
DDefinitionefinition ofof thethe EEntryntry andand TTargetarget PPointoint
Planning and Simulation ToolPlanningPlanning and Simulation Tooland Simulation Tool
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 6
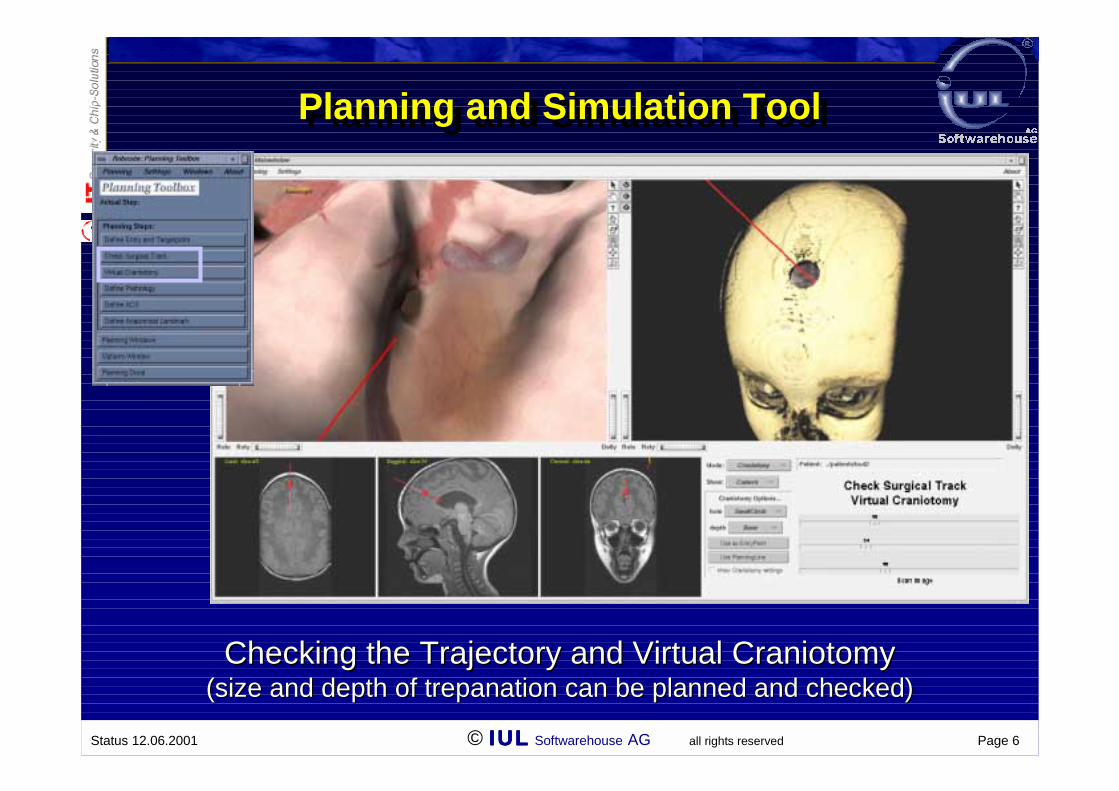
CChecking thehecking the TTrajectoryrajectory andand VVirtualirtual CCraniotomyraniotomy(size and depth of trepanation can be planned and checked)(size and depth of trepanation can be planned and checked)
Planning and Simulation ToolPlanningPlanning and Simulation Tooland Simulation Tool
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 7
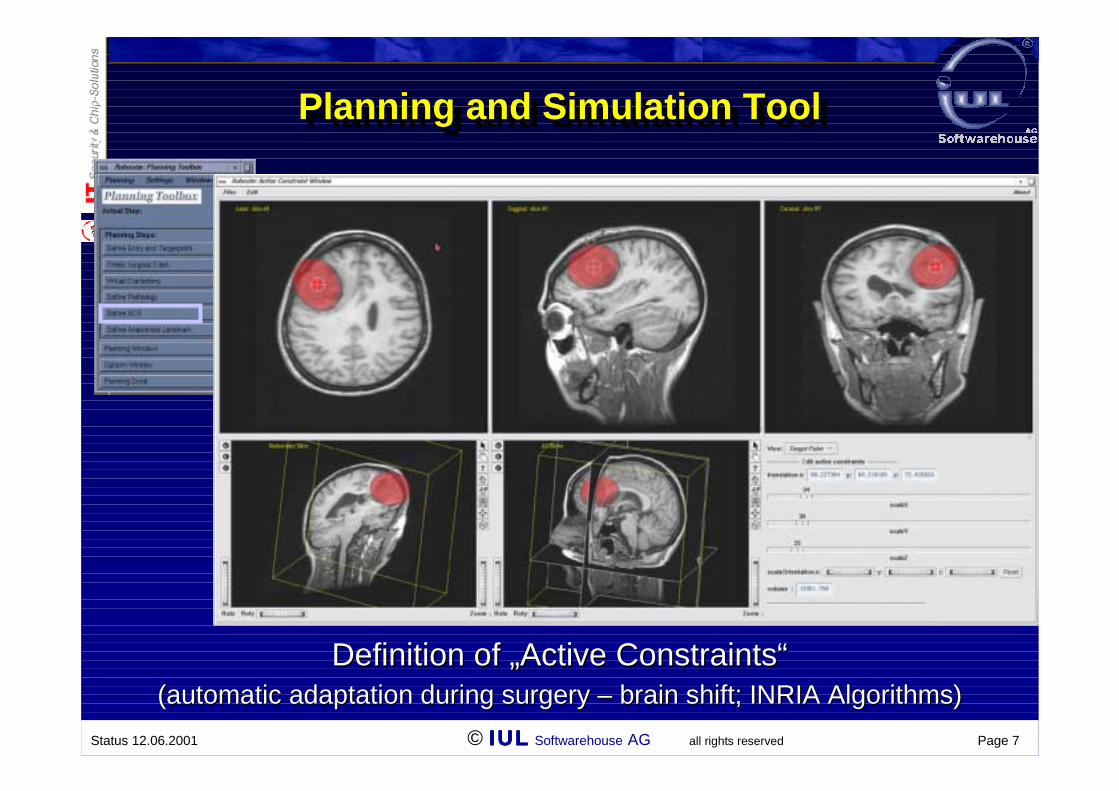
DDefinitionefinition of „of „AActivective CConstraintsonstraints““(automatic adaptation during surgery(automatic adaptation during surgery –– brain shift; INRIA Algorithms)brain shift; INRIA Algorithms)
Planning and Simulation ToolPlanningPlanning and Simulation Tooland Simulation Tool
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 8
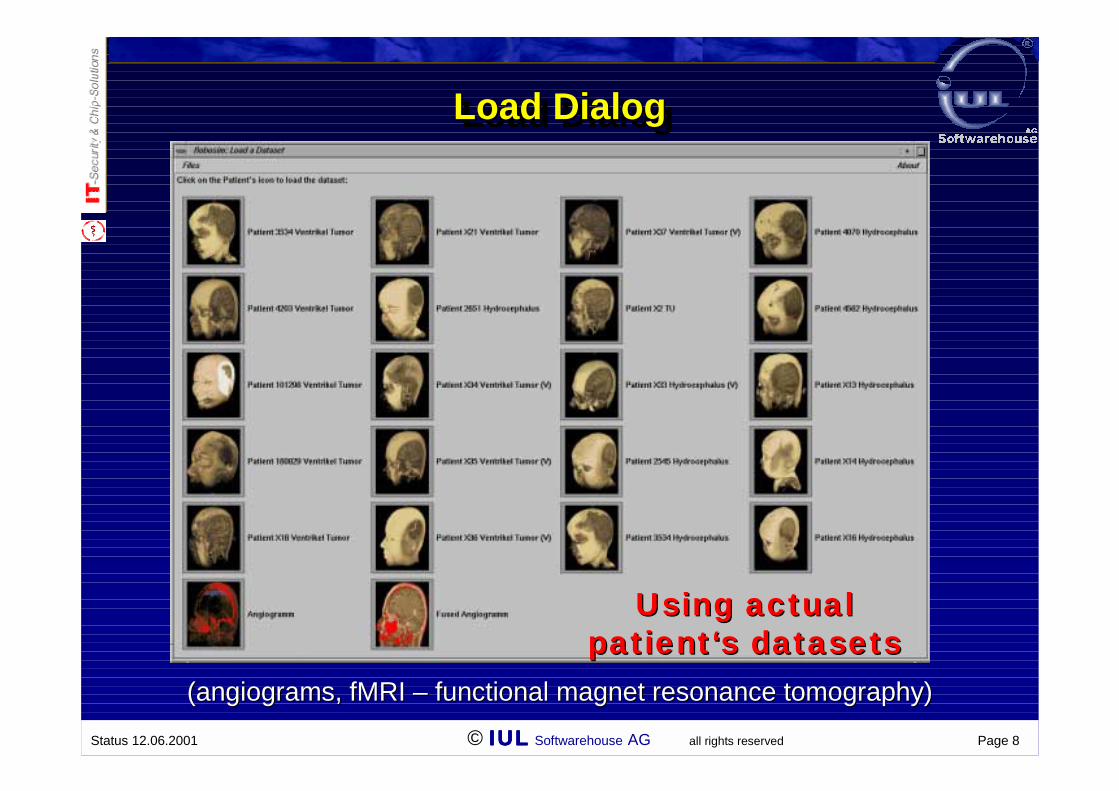
Using actual Using actual patientpatient‘s ‘s datasetsdatasets
Load DialogLoadLoad DialogDialog
((angiogramsangiograms,, fMRIfMRI –– functional magnet resonancefunctional magnet resonance tomographytomography))
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 9
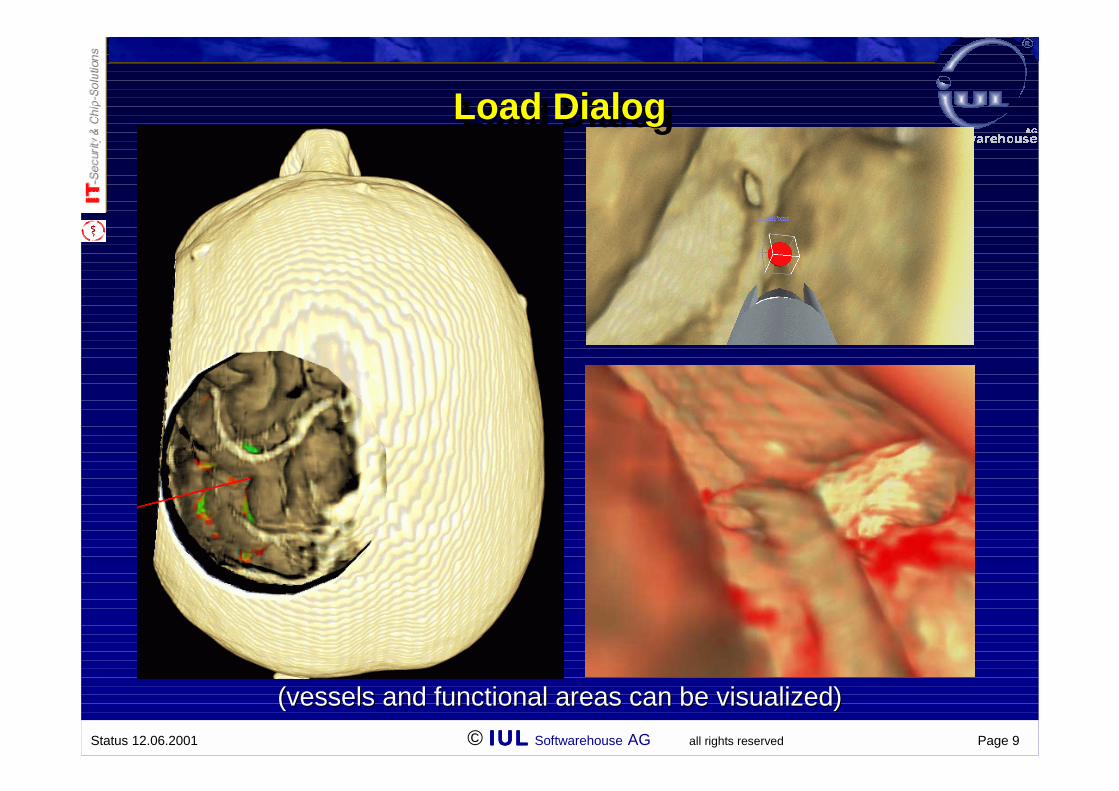
Load DialogLoadLoad DialogDialog
(vessels and functional areas can be visualized)(vessels and functional areas can be visualized)
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 10
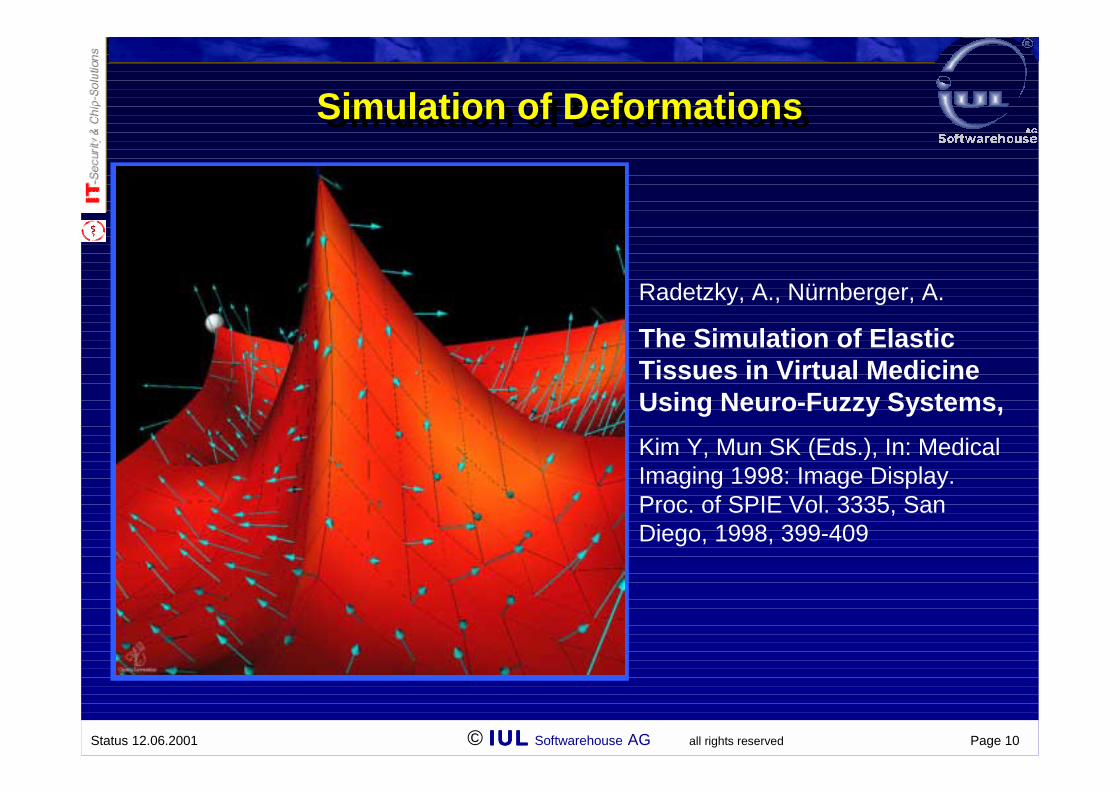
Radetzky, A., Nürnberger, A.
The Simulation of ElasticTissues in Virtual MedicineUsing Neuro-Fuzzy Systems,
Kim Y, Mun SK (Eds.), In: MedicalImaging 1998: Image Display.Proc. of SPIE Vol. 3335, SanDiego, 1998, 399-409
Simulation of DeformationsSimulation ofSimulation of DeformationsDeformations
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 11
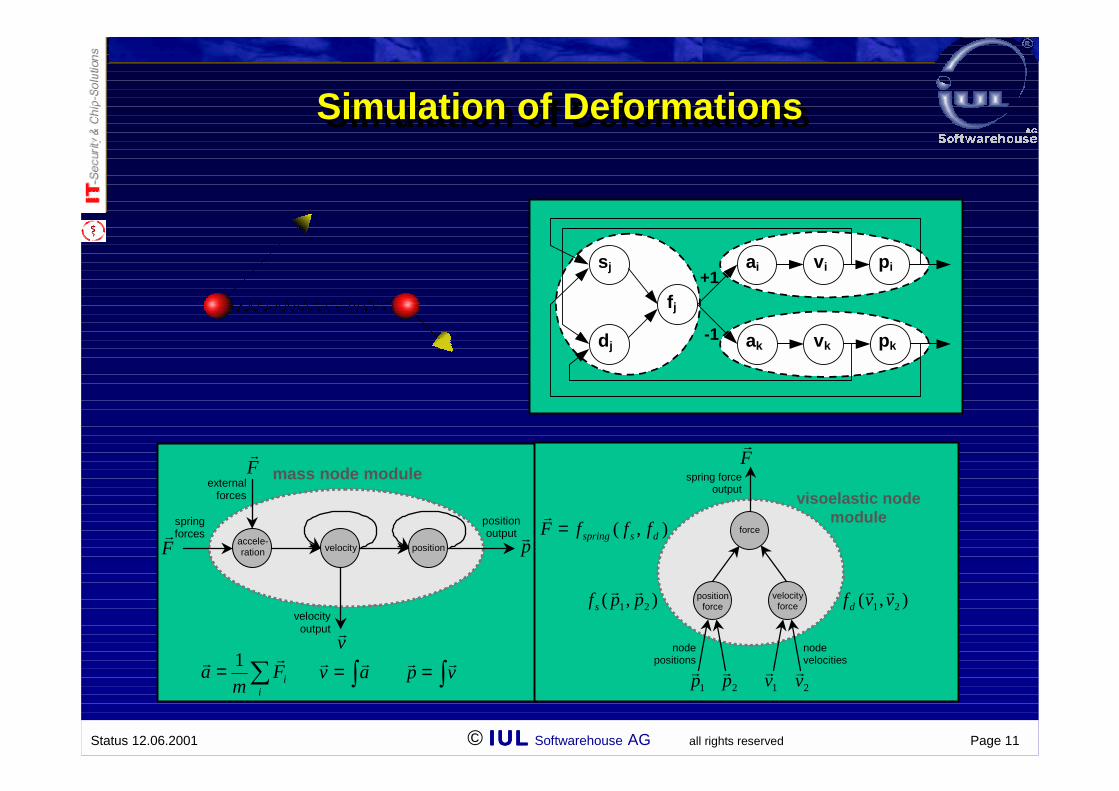
Simulation of DeformationsSimulation ofSimulation of DeformationsDeformations
springforces
externalforces
accele-ration velocity position
velocityoutput
mass node module
positionoutput
vr
pr
Fr
∑=i
iFm
arr 1
Fr
∫= avrr
∫= vprr
spring forceoutput
force
nodepositions
visoelastic nodemodule
1pr
Fr
),( dsspring fffF =r
2pr
nodevelocities
1vr
2vr
positionforce
velocityforce),( 21 ppfs
rr),( 21 vvfd
rr
ai vi pi
fj
sj
dj ak vk pk
+1
-1
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 12
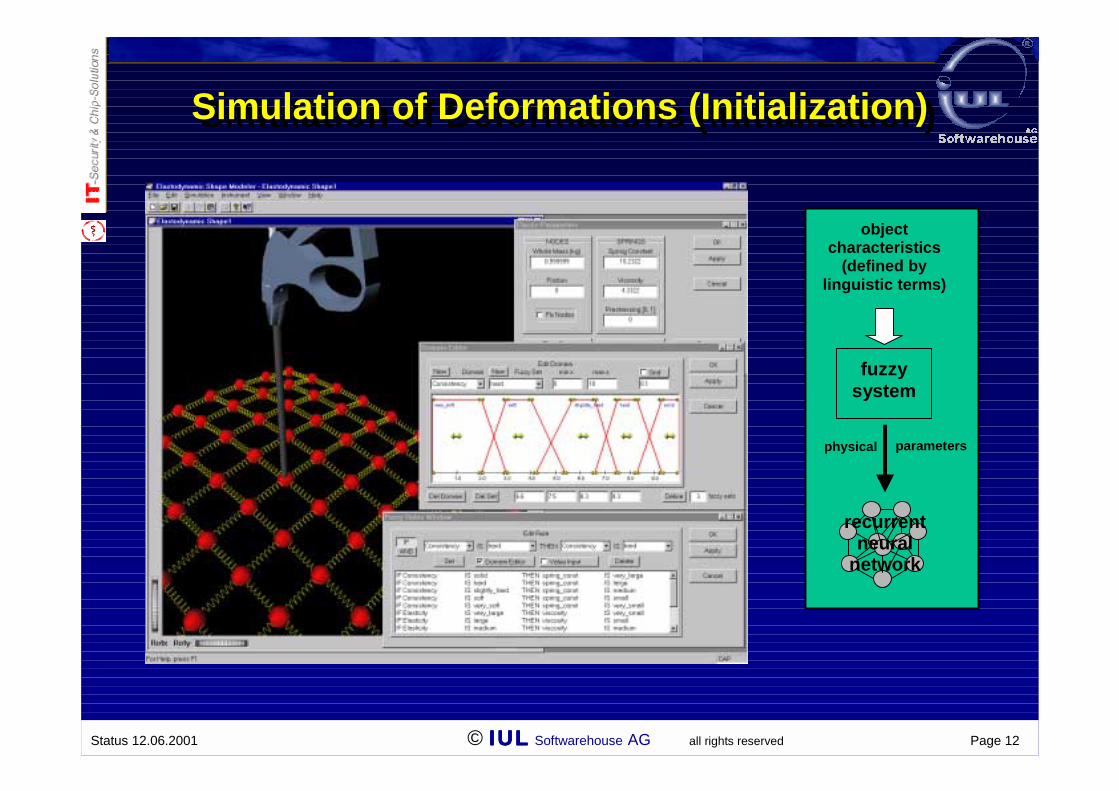
Simulation of Deformations (Initialization)Simulation ofSimulation of DeformationsDeformations (Initialization)(Initialization)
fuzzysystem
objectcharacteristics
(defined bylinguistic terms)
parametersphysical
recurrentneural
network
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 13
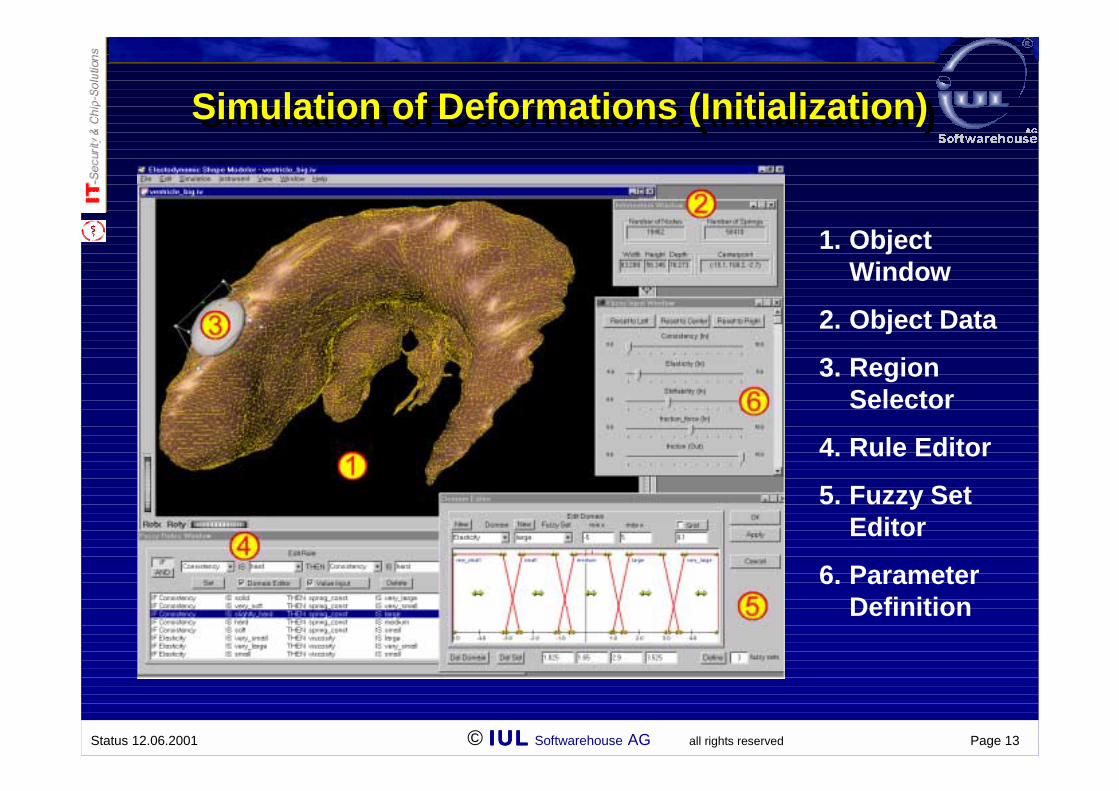
Simulation of Deformations (Initialization)Simulation ofSimulation of DeformationsDeformations (Initialization)(Initialization)
1. ObjectWindow
2. Object Data
3. RegionSelector
4. Rule Editor
5. Fuzzy SetEditor
6. ParameterDefinition
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 14
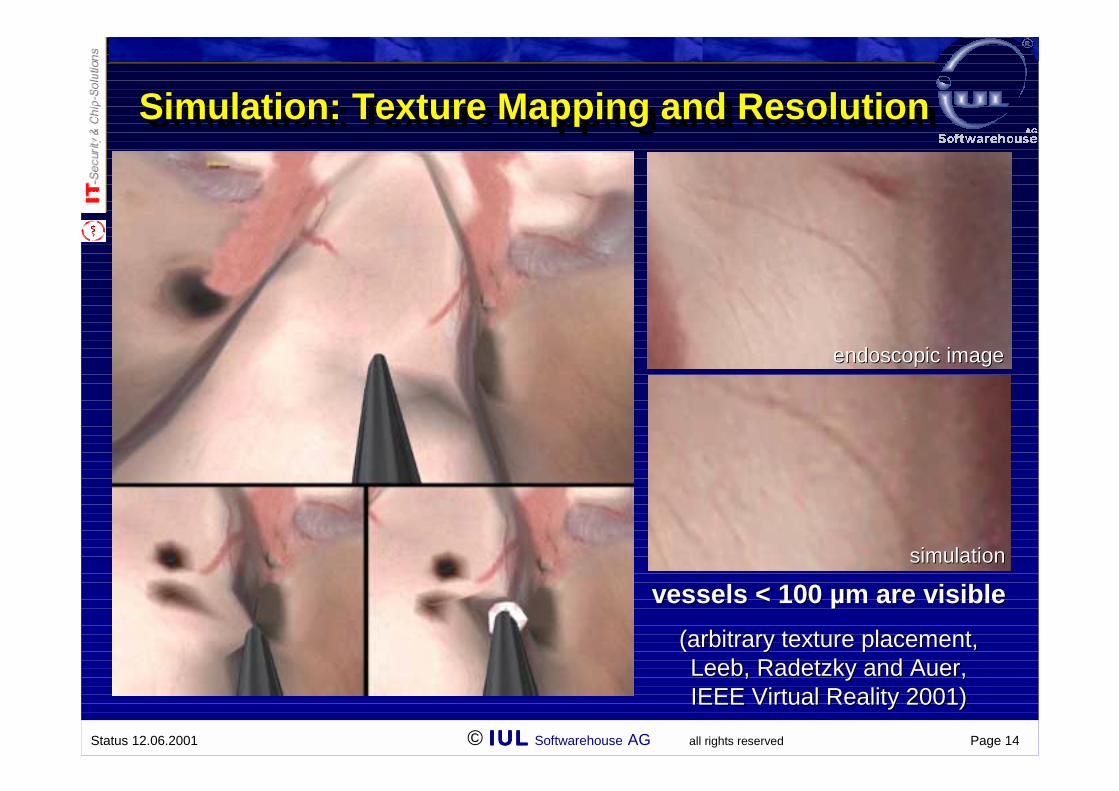
vesselsvessels < 100 µm< 100 µm areare visiblevisible
(arbitrary texture placement,(arbitrary texture placement,LeebLeeb,, RadetzkyRadetzky andand AuerAuer,,IEEE Virtual Reality 2001)IEEE Virtual Reality 2001)
Simulation: Texture Mapping and ResolutionSimulation:Simulation: Texture MappingTexture Mapping and Resolutionand Resolution
endoscopicendoscopic imageimage
simulationsimulation
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 15
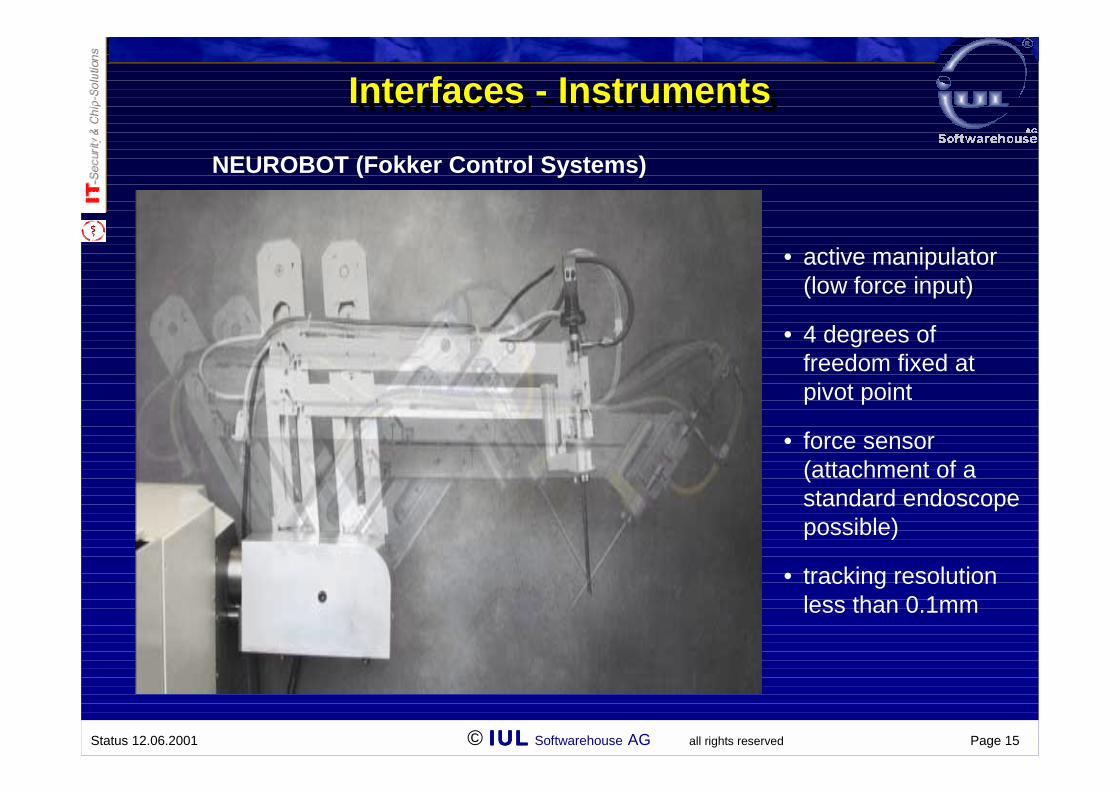
NEUROBOT (Fokker Control Systems)
Interfaces - InstrumentsInterfacesInterfaces -- InstrumentsInstruments
• active manipulator(low force input)
• 4 degrees offreedom fixed atpivot point
• force sensor(attachment of astandard endoscopepossible)
• tracking resolutionless than 0.1mm
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 16
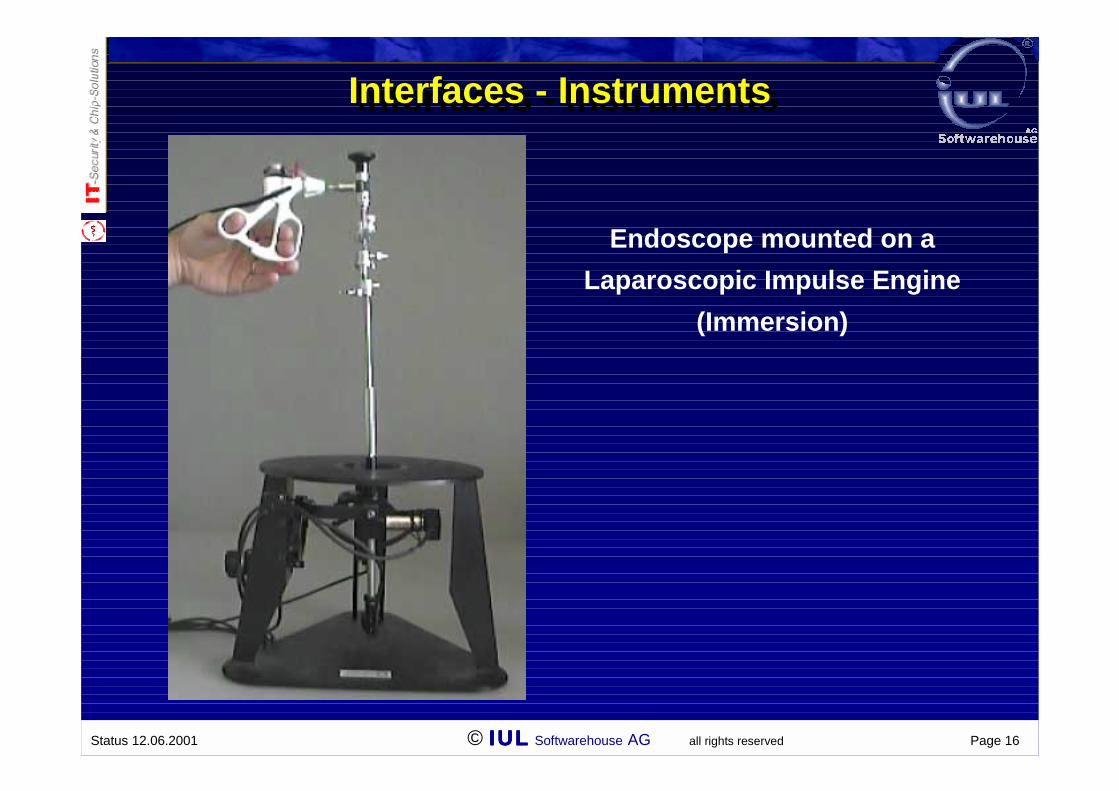
Interfaces - InstrumentsInterfacesInterfaces -- InstrumentsInstruments
Endoscope mounted on a
Laparoscopic Impulse Engine
(Immersion)
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 17
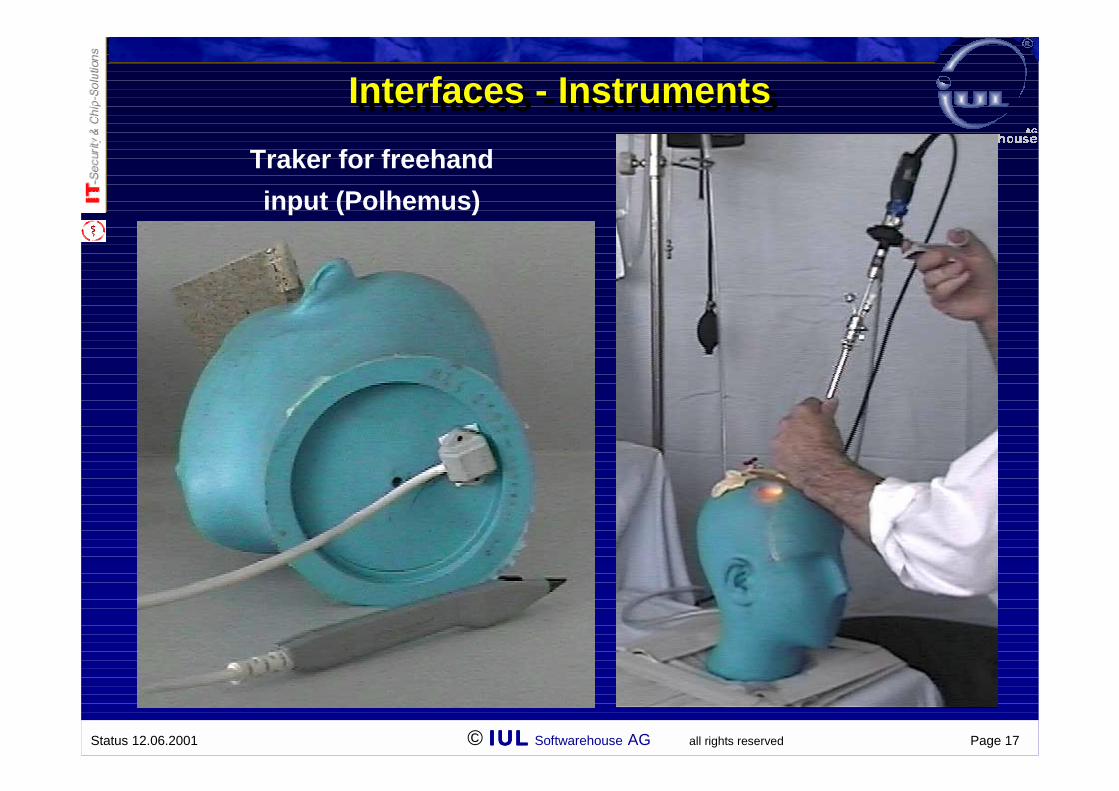
Interfaces - InstrumentsInterfacesInterfaces -- InstrumentsInstruments
Traker for freehand
input (Polhemus)
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 18
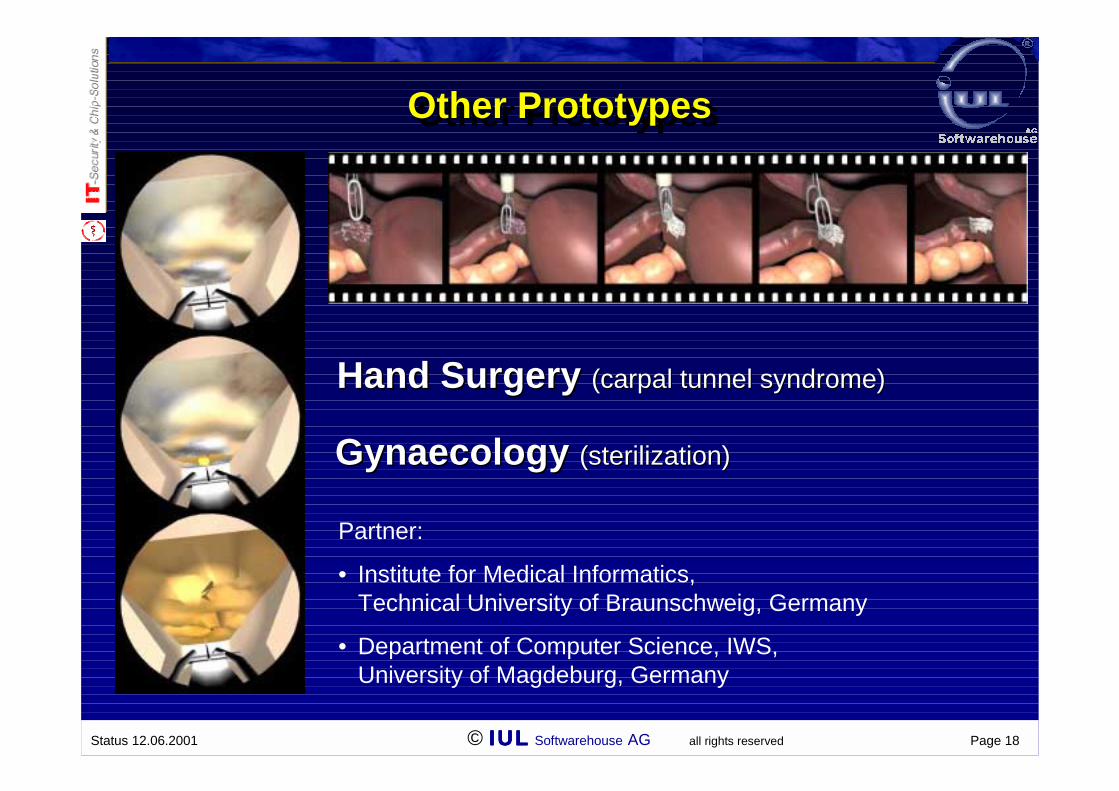
Hand SurgeryHand Surgery (carpal tunnel syndrome)(carpal tunnel syndrome)
GynaecologyGynaecology (sterilization)(sterilization)
Other PrototypesOther PrototypesOther Prototypes
Partner:
• Institute for Medical Informatics,Technical University of Braunschweig, Germany
• Department of Computer Science, IWS,University of Magdeburg, Germany
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 19
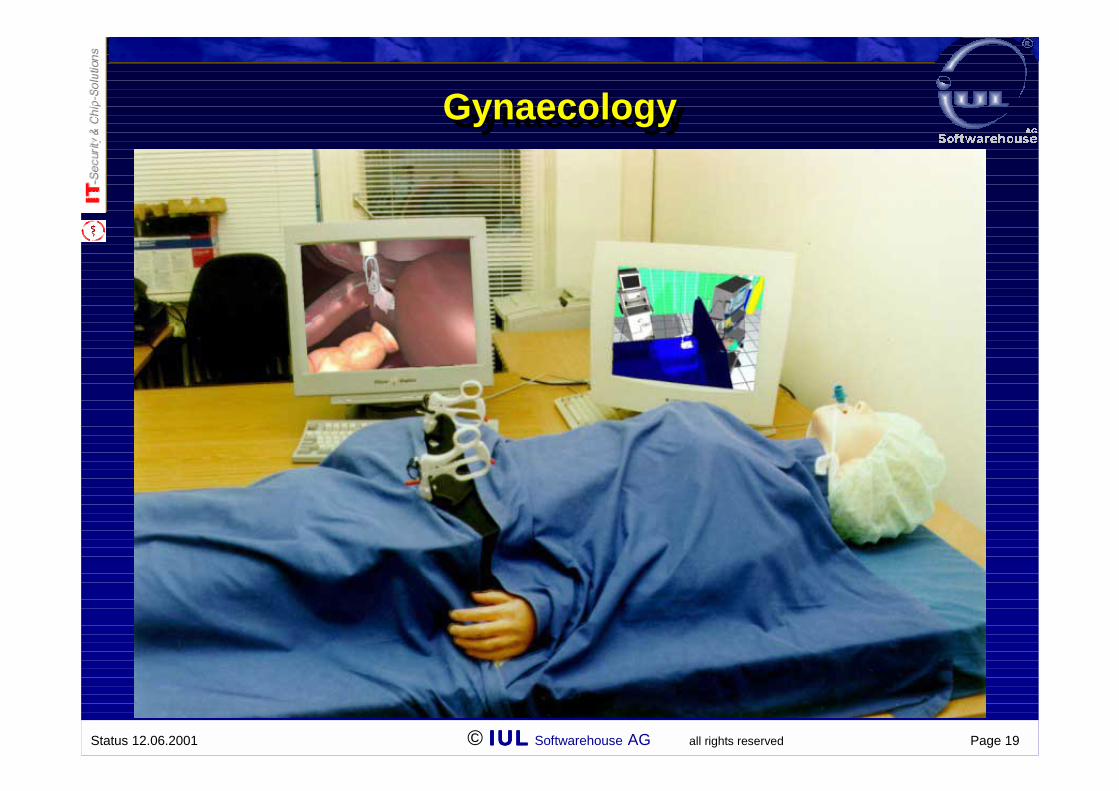
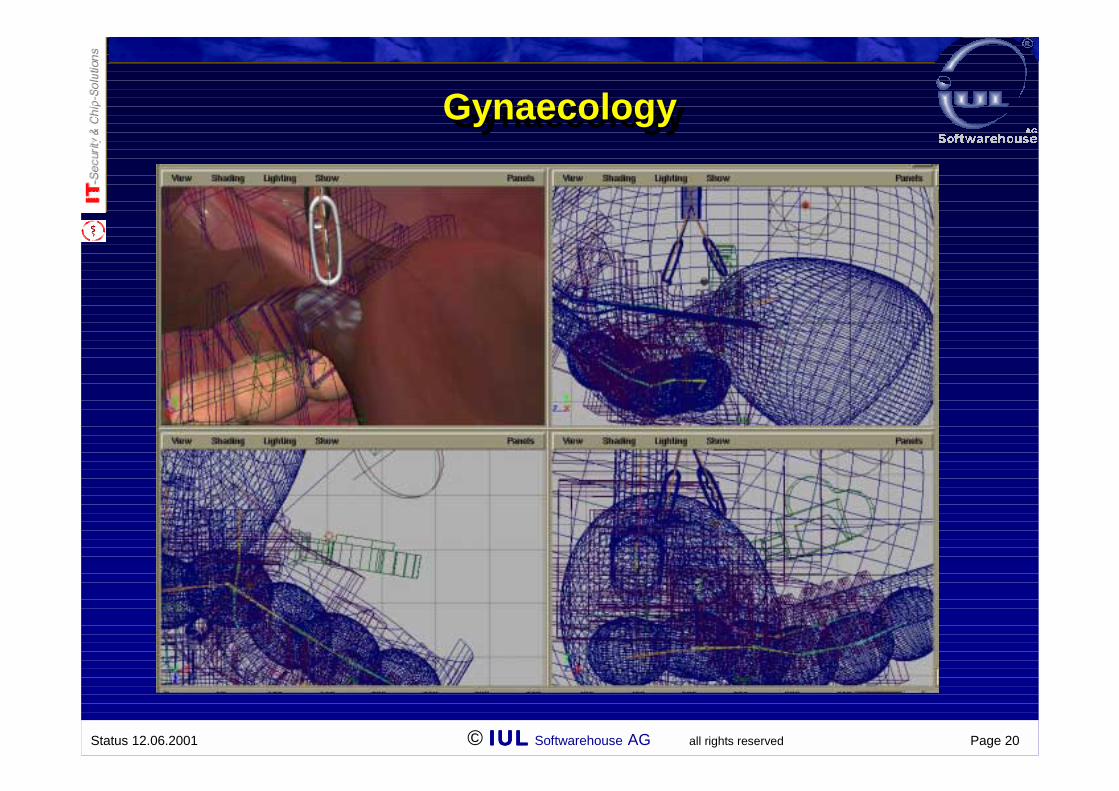
GynaecologyGynaecologyGynaecology
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 20
GynaecologyGynaecologyGynaecology
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 21
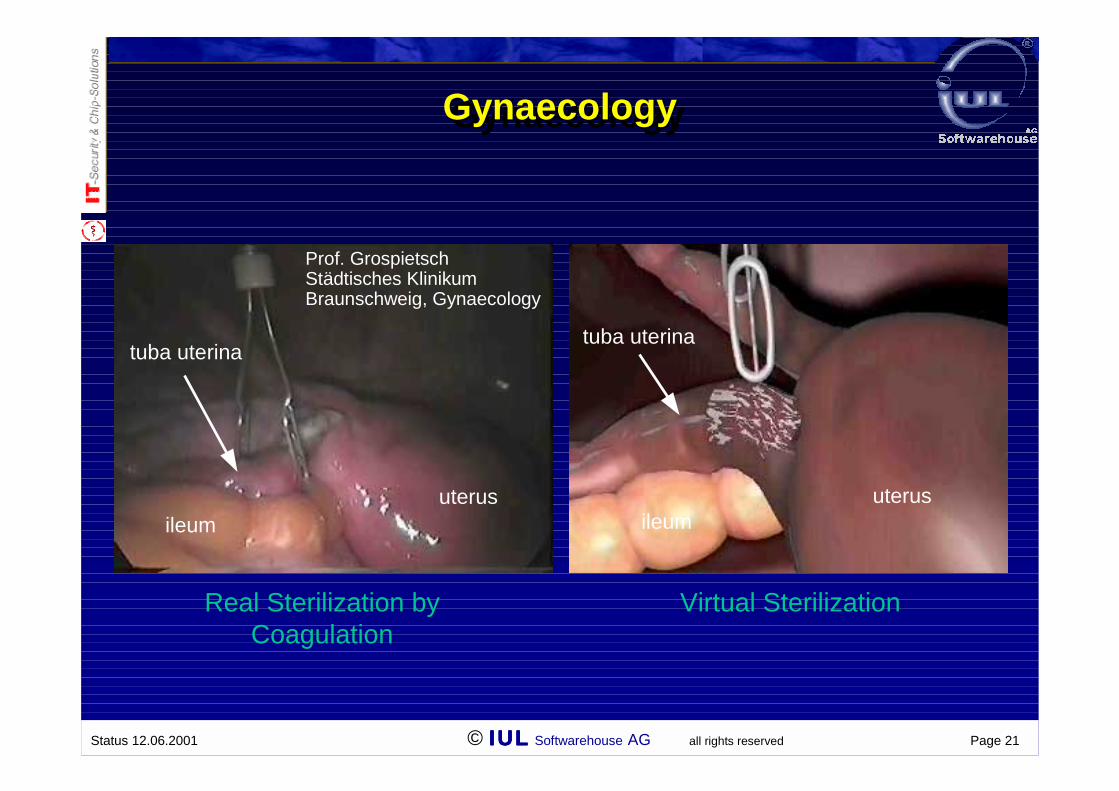
GynaecologyGynaecologyGynaecology
Real Sterilization byCoagulation
Virtual Sterilization
Prof. GrospietschStädtisches KlinikumBraunschweig, Gynaecology
uterus uterusileum ileum
tuba uterinatuba uterina
Status 12.06.2001 © IULIULIULIUL Softwarehouse AG all rights reserved Page 22
•• Surgical planning, virtualSurgical planning, virtual endoscopyendoscopy andandsimulation by using actual patient’s datasetssimulation by using actual patient’s datasets
•• Simulation by using indirect volume renderingSimulation by using indirect volume rendering(actual patient’s datasets)(actual patient’s datasets)
•• Three prototypes: implemented on a SGI Onyx2Three prototypes: implemented on a SGI Onyx2IR (2 CPU)IR (2 CPU)
•• Planned rePlanned re--implementation of the prototypes onimplementation of the prototypes ona standard PC platforma standard PC platform
•• First systems on the market within the next yearFirst systems on the market within the next year
SummarySummarySummary