Embed Size (px)
Citation preview

This article was downloaded by: [Umeå University Library]On: 23 November 2014, At: 09:03Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954Registered office: Mortimer House, 37-41 Mortimer Street, London W1T3JH, UK
Advanced RoboticsPublication details, including instructions forauthors and subscription information:http://www.tandfonline.com/loi/tadr20
'SWAN': a robot for nucleardisaster prevention supportYuuji Hosoda , Hiroshi Yamamoto , Makoto Hattori ,Hiroshi Sakairi , Tarou Iwamoto , MasatakaOowada , Akihiro Kanno & Yuuji SaitouPublished online: 02 Apr 2012.
To cite this article: Yuuji Hosoda , Hiroshi Yamamoto , Makoto Hattori , HiroshiSakairi , Tarou Iwamoto , Masataka Oowada , Akihiro Kanno & Yuuji Saitou (2002)'SWAN': a robot for nuclear disaster prevention support , Advanced Robotics, 16:6,485-488, DOI: 10.1163/156855302320535782
To link to this article: http://dx.doi.org/10.1163/156855302320535782
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all theinformation (the “Content”) contained in the publications on our platform.However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness,or suitability for any purpose of the Content. Any opinions and viewsexpressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of theContent should not be relied upon and should be independently verified withprimary sources of information. Taylor and Francis shall not be liable for anylosses, actions, claims, proceedings, demands, costs, expenses, damages,and other liabilities whatsoever or howsoever caused arising directly or

indirectly in connection with, in relation to or arising out of the use of theContent.
This article may be used for research, teaching, and private study purposes.Any substantial or systematic reproduction, redistribution, reselling, loan,sub-licensing, systematic supply, or distribution in any form to anyone isexpressly forbidden. Terms & Conditions of access and use can be found athttp://www.tandfonline.com/page/terms-and-conditions
Dow
nloa
ded
by [
Um
eå U
nive
rsity
Lib
rary
] at
09:
03 2
3 N
ovem
ber
2014

Advanced Robotics, Vol. 16, No. 6, pp. 485–488 (2002)Ó VSP and Robotics Society of Japan 2002.Also available online - www.vsppub.com
Technical note
‘SWAN’: a robot for nuclear disaster prevention support
YUUJI HOSODA 1, HIROSHI YAMAMOTO 1, MAKOTO HATTORI1,HIROSHI SAKAIRI 1, TAROU IWAMOTO 2, MASATAKA OOWADA 3,AKIHIRO KANNO3 and YUUJI SAITOU 3
1 4th Department, Mechanical Engineering Research Laboratory, Hitachi, Ltd., 502 Kandatsu,Tsuchiura, Ibaraki 300-0013, Japan, [email protected]
2 Department of Mechanical and Systems Engineering, Faculty of Science and Technology , RyukokuUniversity, 1-5 Yokoya, Seta Ohe-cho, Ootsu, Shiga 520-2194, Japan, [email protected]
3 Advanced Equipment System Center, Nuclear Systems Division, Hitachi, Ltd., 1-1 Saiwai-cho3-chome, Hitachi, Ibaraki 317-8511, Japan, [email protected]
Keywords: Mobile system; transformablecrawler mechanism; manipulator; remote control; work tool.
1. INTRODUCTION
For the purpose of carrying out disaster prevention missions in a nuclear facilitysafely and precisely, a nuclear disaster prevention support robot called SWAN(Smart Working robot for Anti-Nuclear disaster) was developed. The robot canpass through narrow passages, stairs, steps, doors, etc., in nuclear facility buildings,and can approach a work area by remote control. At the work area, it performsdisaster prevention operations using its manipulator.
2. SYSTEM CONFIGURATION OF SWAN
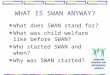
The total system con� guration of SWAN is shown in Fig. 1 and its speci� cationsare listed in Table 1. The robot has a transformable crawler mechanism [1] whichcan change the shape of the crawlers by the revolution of the two main arms, and itcan stably climb up and down stairs, steps, convex obstacles, etc., in a building. Therobot is designed compactly and can turn in a 1-m2 space. The manipulator on therobot which has 6 d.o.f. can perform various operations for disaster prevention op-erations (Table 1) by using special air-driven-type work tools that can be exchangedautomatically. Eight special work tools are available, three of which can be carriedon the robot according to the operation. Basically, the robot can be remotely con-trolled by an operator monitoring the four cameras on the robot (stereo camera, frontcamera, rear camera and the camera on each tool) and the information from the sen-sors which detect the moving status of the robot. In addition, to perform standardoperations ef� ciently and complicated operations precisely, an automatic control
Dow
nloa
ded
by [
Um
eå U
nive
rsity
Lib
rary
] at
09:
03 2
3 N
ovem
ber
2014

486 Y. Hosoda et al.
Figure 1. Total system con� guration of SWAN.
Table 1.Typical speci� cations of the SWAN
Subject Speci� cations
Robot dimension W0:62 £ L0:96 £ H1:7 mand weight 331 kg
main transformable crawler mechanism,components manipulator (6 d.o.f., arm length: 0.9 m, lift capacity 100 N),
remote monitoring cameras (four types), special work tools (eighttypes)
operation remote control (manual and auto sequence control)
mobilefunctions
� at-ground mobile speed: 1 km/h max, pivot-turn diameter: 1 mstairs mobility(inclinations: 40±, step height: 0.2 m, speed: 0.4 km/h max.),step and convex obstacle mobility (step height: 0.2 m)
manipulatorfunctions
door open/ close, valve open/ close, smear sampling,a reactorgas sampling, reactor-water sampling, switch operation, generalhandling
Remote-controlequipment
maincomponents
mobile and manipulator operation interface device, multi-viewmonitor, operating information monitor, stereo head-mount display
aSmear sampling: radioactive dust sampling by paper wiping.
mode is also available. The remote control equipment has a joystick-type mobileoperation interface and a manipulator operation interface. Furthermore, it has twosets of multi-view monitors and a stereo head-mount display for monitoring remoteoperation, and these monitoring devices show the operator the real operation sceneviewed by the cameras on the robot.
Dow
nloa
ded
by [
Um
eå U
nive
rsity
Lib
rary
] at
09:
03 2
3 N
ovem
ber
2014

‘SWAN’: a robot for nuclear disaster prevention support 487
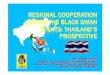
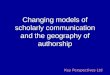
Figure 2. Passing on a landing. Figure 3. Climbing on stairs.
3. MOBILITY PERFORMANCE
The mobility and performance of the SWAN were evaluated in the mock-up en-vironment of a nuclear power plant building. In � at-ground mobile operation bymanual control, the robot can move at a top speed of 1.0 km/h through a passagewith a width of 0.8 m. It can turn in a 1 m2, and, as shown in Fig. 2, it can climbstairs with a width of 0.8 m and a passage on a landing with a width of 1 m. Theremote control equipment also has an automatic mobile control mode which is pro-grammed for standard mobile operations. The operator can carry out complicatedmobile operations, such as side-sliding motion and facing-direction trimming mo-tion, easily by using this control mode.
For mobile operations in complex shaped environments, such as climbing stairs,steps or convex obstacles, the remote control equipment has an automatic mobilecontrol mode based on the information from an inclination sensor and opticalproximity sensors located in the lower part of the mobile mechanism. An exampleof mobile operation, climbing up stairs with a 40± inclination and 0.2 m leveldifference, is shown in Fig. 3. The climbing-up process consists of three main steps.First, the robot extends the crawler by inclining the main arms forward to touch thestairs, which it then starts to climb up. Second, the robot inclines the main armsbackward to keep its center-of-gravity in the stable zone and continues climbingup. Finally, after the robot reaches the top of the stairs, it lowers the main armdownward to incline its body forward and shift its center-of-gravity to the forwardstable zone, and it moves ahead onto the upper landing. The maximum speed duringthe continuous climbing on stairs is 0.4 km/h. The mobile control program has adirection-compensation function using a gyroscope sensor. Therefore, the robotcan climb straight and stably by automatically rectifying any direction deviationcaused by slip of the crawler, etc. Using the same control technique, the robot canautomatically climb up and down a step with a height of 0.2 m and a convex obstaclewith a height and width of 0.2 m.
4. MANIPULATOR PERFORMANCE
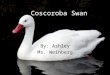
The performance of the manipulator for remote disaster prevention support taskswas evaluated by using mock-up equipment of a nuclear facility. Figure 4 shows the
Dow
nloa
ded
by [
Um
eå U
nive
rsity
Lib
rary
] at
09:
03 2
3 N
ovem
ber
2014

488 Y. Hosoda et al.
Figure 4. Opening a door. Figure 5. Sampling reactor water.
operation of opening a door. The door operation tool has a rigid control mechanismusing air bags. The door operation process consists of four main steps. First, therigidity of the tool is set high so that the manipulator can precisely position thetop of the tool onto the knob, and it then grasps and turns the knob. The tool canoperate a lever or a round knob. Second, the rigidity of the tool is set low so thatthe manipulator can pull and open the door smoothly. Third, the main arms of themobile mechanism extend to the edge of the door, and they � x the position of thedoor so that the tool can release the knob and the manipulator can retract. Finally,the robot opens the door easily by using its turning motion.
Figure 5 shows the operation of sampling reactor water via tandem plugs. Thespecial tool for this operation has tandem quick-coupler joints supported by a low-rigidity mechanism and the joints are connected by a � exible tube for samplingthe water. Therefore, this tool can be attached and detached to the tandem plugssmoothly by remote operation.
In total, including the above-mentioned operations, there are seven kinds of disas-ter prevention support operations (shown in Table 1). All operations were con� rmedby remote control tests by using mock-up equipment of a nuclear facility.
5. CONCLUSION
A remote control robot SWAN was developed for execution of disaster preventionsupport missions in a nuclear facility. It was proved that SWAN could performseveral mobile functions and manipulator operations in a mock-up environment ofa nuclear power plant building.
Acknowledgment
SWAN is one result of the METI’s consignment enterprise, ‘Development of roboticsystem for nuclear facility emergency preparedness’, which is coordinated byMSTC (Manufacturing Science and Technology Center).
REFERENCES
1. T. Iwamoto et al., Transformable crawler mechanism with adaptability to terrain variations, in:Proc. Int. Conf. on Advanced Robotics, pp. 285–291 (1983).
Dow
nloa
ded
by [
Um
eå U
nive
rsity
Lib
rary
] at
09:
03 2
3 N
ovem
ber
2014