Embed Size (px)
Citation preview

AN1207スイッチング電源 (SMPS)のトポロジ (パート2)
ご注意:この日本語版ドキュメントは、参考資料としてご使用の上、最新情報につきましては、必ず英語版オリジナルをご参照いただきますようお願いします。
はじめに
本アプリケーションノートは、スイッチング電源(SMPS) トポロジについての 2 部構成の第 2 部です。このシリーズの 初のアプリケーション ノート、『AN1114 - スイッチング電源 (SMPS)トポロジ (パート 1) 』では、異なる SMPS トポロジの基礎について説明し、与えられたアプリケーションに適切なトポロジ選択のためのガイドラインを示しています。
パート 2 では、パート 1 における以前の題材を拡張し、電源コンバータの回路設計に必要な基本ツールのについて解説します。パート 1 で紹介しましたすべてのトポロジが網羅されています。そして、それぞれの基本機能の概略を説明した後に、実際のシステムを回路設計するための数式について説明し、解析します。本書を読み進める前に、このシリーズのパート 1 をお読みになり、慣れていただくことをお勧めします。
目次
本アプリケーションノートには、以下の主な項目があります。
要件項目とルール .......................................................1降圧型コンバータ .......................................................2昇圧コンバータ .........................................................14順方向コンバータ .....................................................182 スイッチ順方向コンバータ ..................................30ハーフブリッジ コンバータ ....................................39プッシュプル コンバータ ........................................47フルブリッジ コンバータ ........................................57フライバック コンバータ ........................................66電圧と電流トポロジ .................................................76結論 ...........................................................................104参考文献 ...................................................................104ソース コード ..........................................................105
要件項目とルール
電源コンバータの回路設計に使用する様々な部品の値は、以下の要件項目およびルールを用いて決定されました。一般的な回路設計の要件項目は以下になります。
• 標準入力電圧 (VDC)• 少入力電圧 (VDC, min)• 大入力電圧 (VDC, max)• 出力電圧 (VOUT)• 標準平均出力電流 (IO, av, nom)• 少平均出力電流 (IO, av, min)• 大リップル電圧 (VR, max)さらに、部品の選定に使用するいくつかの共通ルールがあります。
• MOSFET ( あるいはスイッチ ) は、以下が可能である必要があります。
- 大電圧を許容可能であることこと
- 大電流に耐えられること
- PWM の周波数で効率良く、また正しく動作すること
- SOA ( 安全動作範囲 ) で動作可能なこと ( 損失に依存 )
• ダイオードは、以下が可能である必要があります。
- 大逆電圧に耐えられること
- 平均電流に耐えられること
電圧を表すために回路図中に矢印が使用されています。電圧の極性は、矢印そのものには直接反映されていません ( つまり、電圧が反転していても矢印の方向は逆になっていませんが、電圧の値は負です )。
著者 : Antonio BersaniMicrochip Technology Inc.
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 1

AN1207
降圧型コンバータ
降圧型コンバータは、高い入力電圧をそれより低い出力電圧に変換します。このコンバータは高効率であるために、リニアレギュレータよりも多く使用されます。
トポロジと数式
図1は降圧型コンバータの基本的なトポロジを示しています。Q1 スイッチは、固定周波数と可変デューティ サイクル信号で動作しています。
図 1: 降圧型コンバータ トポロジ
したがって、電圧 VI は矩形波 s(t) です。このような信号のフーリエ級数は、式 1 で表されます。
式 1:
これは、矩形波が直流成分と、増加する ( 複合 ) いくつかの異なる周波数における正弦波との合計で表されることを意味します。この信号がローパス フィルタ ( 式 2) で処理されると、出力 ( 直流値のみ ) を受け取ることになります。
式 2:
LoCo ローパス フィルタは、矩形波からその直流成分を抽出し、基本部と高調波を要求されるレベルに弱めます。
Q1 クローズ (TON 期間 )この構成の回路は、図 2 に示したようになります。オープン回路にするために、このダイオードは逆バイアスされています。
図 2: 降圧型コンバータ : TON 期間
図 2 に基づくと、インダクタの電圧は式 3 で示したようになります。
式 3:
Q1 オープン (TOFF 期間 )図 3 に示すように、スイッチ Q1 がオープンになると、インダクタは、電流の流れを以前のように保とうとします。
図 3: 降圧型コンバータ トポロジ : TOFF 期間
結果的に、D1、LO、Q1 の交点の電圧は、電流が同じ方向となるようにするため、突然負になろうとします ( 図 4 を参照 )。
CO
Q1
LO
VOUTVDC D1
VL
VI
s t( ) A τT--- Σsin+=
τ = デューティ サイクル
T = 周期
A = 矩形波の振幅
矩形波周波数の複合周波数の波形
sf t( ) A τT--- const= =
CO
Q1
LO
VOUTVDC D1
VL
インダクタ電流 ( 固定時間微分値を持つ ) は、傾き :
TON においては :
TON はスイッチ Q1 がクローズ時の休止時間の長さです。
VL VDC VQ on, VOUT––=
iL t( ) iL 0( )VDC VQ on, VOUT––( )
LO--------------------------------------------------------t+=
iL TON( ) iL 0( )VDC VQ on, VOUT––( )
LO--------------------------------------------------------TON+=
CO
Q1
LO
VOUTVDC D1
VL
DS01207A_JP - ページ 2 © 2009 Microchip Technology Inc.

AN1207
図 4: インダクタの動作
式 4 の解はインダクタ電圧を表し、式 5 は電流を表しています。
式 4:
式 5:
入出力とデューティ サイクルの関係
ここまで、連続モードについて説明してきました。それが何であるかとその重要性を理解するには、インダクタ電流を表す図 5 (G) を参照してください。前述したように、TON の期間上昇し、TOFF の期間下降します。
平均電流は、式 6 を用いて簡単に計算できます。
式 6:
平均インダクタ電流も出力に向かって流れる電流です。したがって、出力平均電流は式 7 となります。
式 7:
VL
IL
VL
IL
TON の期間、インダクタは
エネルギーをその磁場に蓄
積します (VL > 0)。
TOFF の期間、インダクタ
は前に蓄えたエネルギーを
放出します (VL < 0)。
VL VOUT VD on,––=
iL t( ) iL TON( )V– OUT VD on,–
LO-------------------------------------t+=
IL av,I2 I1+
2---------------=
IO av,I2 I1+
2---------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 3

AN1207
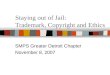
図 5: 降圧型コンバータ波形
TOFFTON
B
IL
I1
I2
-VOUT
VL
VDC - VOUT
A
t
t
t
t
t
t
t
Q1 Command
VDC + VD, on
VQ1
I2
I1
IQ1
VD1
(-VDC + VQ, on)
I2
I1
ID1
T
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(A) = 命令信号と MOSFET ゲート
(B) = 電圧と MOSFET(C) = MOSFET に流れる電流
(D) = D1 ダイオードの電圧
(E) = D1 ダイオードの電流
(F) = LO インダクタの電圧
(G) = LO インダクタの電流
DS01207A_JP - ページ 4 © 2009 Microchip Technology Inc.

AN1207
出力負荷 RO ( 出力キャパシタ CO に並列に接続 ) は増加する方向に変化すると考えると、この変化により、平均出力電流が減少することになります。図 6に示すように、電流は標準負荷のライン A からより大きな負荷のライン B に移動します。注意すべきことは、TON と TOFF 期間の電流の傾きは VDC、VOUTと L のみに依存し、これらが変化していないため、2 つの傾きは変化しないということです。結論として、負荷が増加すると RO が大きくなります。VOは、定数と等しいので ( 既に説明した制御ループがこれを処理 )、RO が増加して電流は減少します。図 6: 異なる負荷におけるインダクタ電流
連続モード
インダクタへの電流の流れが停止する (ゼロになる )ことがないので、この動作は連続モードと名付けられました。
図 6 に示したように、負荷が増加を続ける (IO、avが減少する ) と、ある時点でインダクタ電流のグラフの線が、X 軸 ( ライン C) に交わります。これは、インダクタにおける初期と 終 ( スイッチング期間の 初と 後 )の電流が0になることを意味します。ここで、インダクタ電流はクリティカル モードと考えられる状態に入ります。
負荷がさらに増加すると、下降傾斜中の電流は、T期間 ( ライン D) が終わる前にゼロに到達します。これは、非連続モードとして知られています。
1 つの重要な点として、TOFF 期間の 後におけるインダクタ電流は、TON 期間の 初におけるインダクタ電流と同一の必要があります。つまり、1 つの期間における 後の変化はゼロの必要があるということです。これは、すべての変化が完了し、回路の動作が変化しない安定状態でこのようになっていなければなりません。
式3と式5から派生した IL (TON) の値を使用すると、式 8 に示した関係が導かれます。
式 8:
VD の on と VQ の on を無視して、式 8 を VOUT について解くと、式 9 に示したようになります。
式 9:
式 10 に示したように、入力電圧が 少になるときに 大のデューティ サイクルが達成されます。
式 10:
つまり、D は明らかに「0」と「1」の間です。
TON TOFF
A
B
C
D
T
t
VL
TON
負荷が増加(IO, av は減少 )
注 : 非連続モードの場合、インダクタ電流をさらに減少させる唯一の方法は、ON 時間(TON) を短縮することです。
IL∆ VDC VQ on, VOUT––( )TON∝ VOUT VD on,+( )TOFF=
D = Ton / T ( デューティ サイクル )、あるいは
DVOUTVDC
-------------=
VOUT VDCD=
DmaxVOUT
VDC min,--------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 5

AN1207
連続モード
連続モードにおいては、インダクタ電流は期間 T の終了前にゼロとなります。
連続と非連続モード間の端を決定する (determinesthe edges) インダクタ ( 出力 ) 平均電流 (IO, av, min)は、図 7 に示したように簡単に求められます。
図 7: 非連続モード端におけるインダクタ電流
図 7 に基づくと、インダクタ電流の限界値は式 11と等しくなります。
式 11:
この時点から、降圧コンバータの動作が急激に変化します。
負荷が増加し続けると、システムが電流を減少させる唯一の可能性は、デューティ サイクル ( 図 6) を減少させることです。しかし、このことは、入力と出力の間に式9に示したような線形の関係が存在しなくなることを意味します。
VDC と VOUT と D の関係は、これまでのことを踏まえると、式 12 に示したようになります。
式 12:
図 8 は、この関係を表しています。
TON TOFF
T
t
IL
IO, limit
I1
IL, peak = I2
IO limit,12---IL peak,
12--- I2 I1–( ) 1
2---I2= = =
DVOUTVDC
-------------
IOIO limit,-----------------
1VOUTVDC
-------------–
-----------------------=
DS01207A_JP - ページ 6 © 2009 Microchip Technology Inc.

AN1207
図 8: 連続と非連続領域におけるデューティ サイクル
図 8 に示したように、連続領域から開始してライン(A) に沿って移動すると、D = 0.5 の場所で連続と非連続の領域の境界線 ( 点線 ) が 交差し、同じ出力電圧 (VDC/VOUT = 2) を維持するため、D は式 12 の非線形の関係に従って変化します。
設計方程式と部品の選定
この章では、連続モードの降圧コンバータの回路設計を可能にする方程式を決定します。
インダクタ
平均 少電流 (IO, av, min) は、非連続モード ( 図 7)の境界における平均出力電流として設定されます。この方法では、電流が IO, av, min より大きい場合、システムは連続モードで動作します。通常それは、IO, av, nom の割合で、一般的な値は式 13 に示したように 10% です。
式 13:
式 13 を LO をに関して解くと、式 14 となります。
式 14:
インダクタにおける電力損失
インダクタにおける電力損失は、式15で表されます。
式 15:
D
VDC/VOUT = 1.25
VDC/VOUT = 2
VDC/VOUT = 5.0
IO/IO, limit
Discontinuous regionContinuous region
1
1
(A)
Io av min,, IO limit, 0.1= Io av nom,,12---I2
VDC nom, VOOUT–( )2LO
--------------------------------------------------= TON= =
ここで FPWM は、PWM 周波数 (FPWM =1/T) です。
LO5 VDC nom, VOUT–( )VOUTVDC nom, FPWMIO av nom,,----------------------------------------------------------------=
ここで ESR はインダクタ抵抗と等しい値です。
PLOSS inductor, IO av nom,,( )2ESR=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 7

AN1207
出力キャパシタ
電流リップルは、図 9 に示したように、2 つの部品を持つ出力電圧リップルを生成します。
図 9: 出力キャパシタ CO のモデル
リップル電圧 (VR) の 初の部品は、出力キャパシタのシリーズ抵抗効果 (ESR) に起因します。この抵抗は、図 9 に RESR として示されています。
2 番目の部品、VR、CO はキャパシタに流れ込む電流に起因する電圧降下からきていて、式 16 となります。
式 16:
2 つの負荷は同相ではありません。しかし、ワースト ケースの場合を考えると、それらが同相に合わせられた場合は、式 17 に示したように、1 つのスイッチング期間となります。
式 17:
期間の調整により、規定された出力電圧リップルを保証するために必要なキャパシタ値は、式 18 に示す値となります。
式 18:
キャパシタにおける電力損失
キャパシタで浪費される電力損失は、式 19 で表されます。
式 19:
ダイオード
図 5 (E) を参照すると、TOFF の期間にダイオードに流れる電流は、インダクタ電流です。平均ダイオード電流は式 20 を使用して簡単に計算できます。
式 20:
ダイオードがTONの期間許容する必要のある 大の逆電圧 ( 図 5 (D) を参照 ) は、式 21 で表されます。
式 21:
ダイオードにおける電力損失の計算
ダイオードの電圧はゼロではない (VR) が、電流はゼロであるため、TON の期間の損失は、式 22 と等しくなります。
式 22:
TOFF 期間の損失は、式 23 と等しくなります。
式 23:
MOSFET
TOFF 期間のスイッチの 大電圧 ( 図 5 (B) を参照 )は、式 24 で表されます。
式 24:
CO
LESL (ESL)
RESR (ESR)
VR ESR, RESR I2 I1–( ) RESR IL∆= =
(I2 - I1) は、インダクタに流れ込み、出力される ( 非連続
モードの端で、∆IL = 2 IO, limit) リップル電流です。
そして、
VR CO,1
CO------- iC∫ t( ) dt=
VR total,∆ RESR IL∆ 1CO------- IL∆ D
FPWM---------------+=
COIL∆ D
FPWM VR total,∆ RESR IL∆–[ ]----------------------------------------------------------------------=
PLOSS capacitor, IL2∆ RESR=
ID av, IO av nom,, 1 D–( )=
VR max, V– DC max, VQ on,+=
PD TON, 0=
PD TOFF, VfIO av nom,,TOFF
T------------- VfIO av nom,, 1 D–( )= =
VQ max, VDC max, VD on,+=
DS01207A_JP - ページ 8 © 2009 Microchip Technology Inc.

AN1207
TON 期間の平均電流 ( 図 5 (C)) は、式 25 で表されます。式 25:
MOSFET の電力損失の計算
スタティック損失
TON の期間、Q1 へ流れる平均電流は IO, av、nom • Dで、電圧は V = Vf スイッチ順方向電圧となるため、スタティック損失は、式 26 のようになります。この値は、VF が相対的に小さいので小さくなります。
式 26:
この同じ損失が、MOSFET の RDS(ON) を用いて表されます。期待するジャンクション温度におけるRDS(ON) 値は部品のデータシートから決定するよう注意してください (RDS(ON) は、温度により増加します )。これは、式 27 で表されます。
式 27:
TOFF の期間、Q1 の電圧は、VDC + VD, on ( 図 5 (B))です。しかし、式 28 に示したように電流はゼロです。したがって、電力損失に対して何も補償がありません。
式 28:
スイッチング損失
図 10 はスイッチングの間に何が起きているかを説明しています。考えるべき 2 つのイベントがあります。オン (Q1 クローズ ) とオフ (Q1 オープン ) です。
両方の場合、電圧と電流は、急激には変化しません。しかし、線形の動作をします。図 10 の表現は、電圧VQ1をオンにしてそれをVDCに一定に維持し、電流がゼロから 大の値まで急速に上昇する 悪の可能性を表しています。この瞬間だけ、電圧は VFの 少値に降下し始めます。現実には、なぜか 2 つの傾斜はオーバーラップします。しかし、これは悪の場合なので、この描写された状況は、電流スイッチングイベントと考えられます。したがって、電源オンは、式 29 と等しくなります。
図 10: MOSFET スイッチング損失計算波形
式 29:
IQ av, IO av nom,, D=
PQ1 static TON,, VfIO av nom,,TON
T---------- DVfIO av nom,,= =
PQ1 static TON,, D IO av nom,,( )2RDS ON( ) hightemp=
PQ1 static TOFF,, 0=
VQ1
IQ1
TCR
TVR
TCF
Turn-offTurn-on
TON TOFF
T
TVF
t
1T---= VQ1∫ IQ1dt 1
T--- VDC
0
TCR
∫IO av nom,,
TCR-----------------------tdt 1
T--- IO av nom,,
VDCTVF----------⎝ ⎠
⎛ ⎞ t tVDCIO av nom,,
2----------------------------------
TCRT
---------VDCIO av nom,,
2----------------------------------
TVFT
---------+=d0
TVF
∫+≅
PQ1 switching turnon,, =
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 9

AN1207
TCR が式 30 と等しい場合、式 29 は、式 31 に示したように簡素化できます。式 30:
式 31:
式 32 を使用して、スイッチング損失のオフが計算できます。
式 32:
また、TVR が式 33 と等しい場合、この計算結果は、式 34 のようになります。
式 33:
式 34:
MOSFET における損失の合計は、式 35 で表されます。
式 35:
TCR TVF TSW= =
PQ1 switching turnon,, VDCIO av nom,,TSW
T----------=
PQ1 switching turn, off–, =
1T--- VQ1∫ IQ1dt 1
T--- IO av nom,,
0
TVR
∫VDCTVR----------tdt 1
T--- VDC
0
TCF
∫IO av nom,,
TCF-----------------------tdt+≅
VDCIO av nom,,2
----------------------------------TVR
T---------
VDCIO av nom,,2
----------------------------------TCF
T---------+==
TVR TCF TSW= =
PQ1 switching turn off–,, VDCIO av nom,,TSW
T----------=
PQ1 total, PQ1 static TON, , PQ1 switching turn on–,, PQ1 switching turn off–,, DVfIO av nom,, 2VDCIO av nom,,TSW
T----------+=+ +=
DS01207A_JP - ページ 10 © 2009 Microchip Technology Inc.

AN1207
降圧コンバータ回路設計例
この章では、前述した方程式が降圧コンバータの回路設計にどのように使用されるかについて示しています。さらに、標準的な回路設計の要件事項とそれらが回路設計にどのように影響するかについても議論しています。
回路設計の要求事項
回路設計の要求事項は、次のとおりです。 • 入力電圧 : VDC = 12V +/- 30%• 出力電圧 : VOUT = 5V• IO nominal = IO, av, nom = 2A• IO limit = 0.1 IO, av, nom = 0.2A• (I2 - I1) = ∆IL = 2 IO, limit = 0.4A• スイッチング周波数 = 200 kHz• 出力リップル電圧 = 50 mV• 入力リップル電圧 = 200 mV
回路設計プロセス
デューティ サイクルの計算
コンバータは連続モードで動作すると考えますので、式 9 が成り立ち、次のようになります。
• Dnominal = VOUT/VDC = 5/12 = 0.42.
さらに、使用可能な 大と 少入力電圧は、以下のように計算できます。
• 少入力電圧 = 8.5V• 大入力電圧 = 15.5V
インダクタ
式 14 を適用すると、インダクタ ( 連続モード ) の標準値は、式 36 と等しくなります。
式 36:
インダクタは、システムが式 37 に示した 大入力電圧で連続モードに置かれることを要求します。
式 37:
Lo5 VDC VOUT–( )
IO av nom,,--------------------------------------
VOUTVDC
------------- 1FPWM--------------- 5 12 5–( )⋅
2--------------------------- 5
12------ 1
200K------------- 36µH=⋅ ⋅= =
LO M,VDC VOUT–
0.2IO av nom,,-------------------------------
VOUTVDC
------------- 1FPWM--------------- 15.5 5–
0.2 2⋅------------------- 5
15.5---------- 1
200K------------- 42µH=⋅ ⋅==
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 11

AN1207
少入力電圧で必要なインダクタは、式 38 に示すようになります。
式 38:
少でも 42 µH のインダクタにより、フルの入力電圧を超えて非連続とならないようにします。
実際に、 少インダクタ L = 26 µH が選択されると、大入力電圧 (VDC = 15.5V) で、電流リップル I2 - I1
= 0.85A となります。逆にインダクタ L = 42 µH 、入力電圧 8.5V であれば、電流リップルは 0.17A となります。これは、42 µH 以上のインダクタであれば適していることを意味します。
出力キャパシタンス
式 39 では、キャパシタンスの選択のために、ESR = 30 mΩ と仮定します。
式 39:
入力キャパシタ
出力キャパシタンスの計算と同じアプローチを用い、式 40 を使用して入力キャパシタンスが計算されます。
式 40:
フリーホイール ダイオード選択
式 21 ( 図 5 (D) を参照 ) に基づき、TON 期間のダイオードの 大逆電圧が式 41 に示したように計算されます。
式 41:
式 20 によれば、ダイオードの平均電流は、式 42 に示したように計算されます。
式 42:
LO m,VDC VOUT–
0.2IO av nom,,-------------------------------
VOUTVDC
------------- 1FPWM--------------- 8.5 5–
0.2 2⋅---------------- 5
8.5------- 1
200K------------- 26µH=⋅ ⋅==
C∆ILD
FPWM VRIPPLE RESR∆IL–[ ]--------------------------------------------------------------------- 0.4 0.42⋅
200K 50 10 3– 30 10 3– 0.4⋅ ⋅–⋅[ ]------------------------------------------------------------------------------- 22µF= = =
C∆ILD
FPWM VRIPPLE RESR∆IL–[ ]--------------------------------------------------------------------- 0.4 0.42⋅
200K 0.2 30 103 0.4⋅ ⋅–[ ]--------------------------------------------------------------- 4.5µF= = =
VR max, V– DC max, VQ on, 15.5V–≈+=
ID av, IO av nom,, 1 D–( ) 2 1 0.42–( ) 1.16A=⋅==
DS01207A_JP - ページ 12 © 2009 Microchip Technology Inc.

AN1207
MOSFET の選択
MOSFET 選択の重要なパラメータは、平均電流と大電圧です ( 式 24 と式 25 を参照 )。これらは式 43と式 44 で表されます。
式 43:
式 44:
MOSFET の電力損失は、式 35 で計算できます。結果は、標準値 VF = 1V と TSW = 100 ns を使用すると、式 45 となります。
式 45:
VQ max, VDC max, VD 15.5V≈+=
IQ av, IO av nom,, D 2 0.42 0.84A=⋅==
PLOSS max, DVf IO av nom,, 2VDCIO av nom,,TSW
T---------- 0.42 1V 2A 2 15.5V 2A⋅ ⋅+ 100ns
5µs--------------- 0.84 1.24 2.08W=+=⋅⋅ ⋅=+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 13

AN1207
昇圧コンバータ
昇圧コンバータは、低い入力電圧をそれよりも高い出力電圧に変換します。
トポロジ方程式
図 11 は、昇圧コンバータの基本的なトポロジを表しています。
図 11: 昇圧コンバータ トポロジ
Q1 クローズ (TON 期間 )この構成の回路は、図 12 に示すようになります。
図 12: 昇圧コンバータ トポロジ : TON 期間
インダクタに生じる電圧は、式 46 で表されます。
式 46:
インダクタ方程式 ( 式 46) に基づくと、電流の結果は、式 47 で表されます。
式 47:
Q1 オープン (TOFF 期間 )スイッチがオープンのとき ( 図 13)、インダクタ電流は急速には変化しないので、電圧を極性を変更する必要があります。これにより、電流はダイオードを通して流れ始め、順方向バイアスとなります。
図 13: 昇圧コンバータ トポロジ : TOFF 期間
生じるインダクタ電圧は、式 48 で表されます。
式 48:
TOFF 期間にインダクタに流れる電流は減少していき、式 49 を使用して計算できます。
式 49:
動作モード
降圧コンバータと同様に、昇圧コンバータも連続モードと非連続モードで動作できます。2 つのモードの違いは、インダクタ電流にあります。連続モードでは、それはゼロにはなりません。一方非連続モードにおいては、TOFF 期間に低下するインダクタ電流は、それに続く PWM 周期の開始前にゼロに到達します。
降圧コンバータのように、昇圧コンバータも両方のモードで使用できます。どちらの場合にも制御ループを考慮する必要があります。一方のモードのソリューションが、必ずもう一方モードでも良好に動作するわけではありません。
連続動作モード
通常は、TON と TOFF 期間のインダクタ電圧未満における 2 つの領域は同じ必要があります。これは、PWM 周期の初めと終わり ( 安定状態 ) における電流が等しいことを意味します。式 47 と式 49 を使用すると、その関係は式 50 に示したようになります。
COQ1
L1
VOUT
VDC
D1
VOUT
RO
VL
COQ1
VL
VOUTVDC
D1
VOUT
RO
L1
VL VDC VQ on,–=
IL t( ) IL 0( )VDC VQ on,–( )
L1------------------------------------t+=
COQ1
L1
VOUTVDC
VD
RO
D1
VL
VL VDC VD on, VOUT 0<––=
IL t( ) I TON( )VDC VD on, VOUT––
L1---------------------------------------------------t+=
DS01207A_JP - ページ 14 © 2009 Microchip Technology Inc.

AN1207
式 50:これは、降圧変換機能とは異なり、非線形の関係である点に注意することが重要です ( 図 14)。損失のない回路であるとみなすと、PO = PDC、VOIO = VDCIDC であるため、式 51 となります。
式 51:
非連続動作モード
I/O の関係を見つけるには、降圧コンバータの場合とは異なるエネルギーを考慮した別のアプローチを使用します。
負荷への全電力 (PT) は、インダクタの磁場の寄与からと、TOFF 期間の入力電圧 VDC から生じます。
インダクタから生じる電力 ( 効率 100% とみなす )は、式 52 で表されます。
式 52:
TOFF 期間に入力によって負荷に生じる電力は、式 53 で表されます。
式 53:
負荷に生じる全電力は、式 52 と式 53 の合計です。全ピーク電流は、式 47 からは派生します。TON + TF= kT の場合、結果は式 54 となります。
式 54:
図 14:
D は PWM 信号のデューティ サイクルです。
VOUTVDC1 D–-------------=
IOIDC--------- 1 D–( )=
Ip はインダクタのピーク電流です。
PLL1I 2
P
2T-------------=
PDC VDCIPTF2T
-----------=
ここで TF は、図 15 (G) に示したように、TON からインダク
タ電流がゼロに到達するときの TOFF 期間の割合です。
RO は出力負荷抵抗です。
VOUT VDCkROTON
2L1---------------------=
0
20
40
60
80
100
120
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97
Series1
D%
VO/VDC
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 15

AN1207
図 15: 昇圧コンバータ波形 ( 非連続モード )
t
t
t
t
t
t
t
(A)
(B)
(C)
(D)
(E)
(F)
(G)
Q1 Command
VQ1
IQ1
VD1
ID1
VDC
VL
VDC - VOUT
IL
TF
VD + VOUT
TON TOFF
-VOUT + VQ
(A) = 命令信号と Q1 MOSFET ゲート
(B) = Q1 MOSFET の電圧
(C) = Q1 MOSFET に流れる電流
(D) = D1 ダイオードの電圧
(E) = D1 ダイオードの電流
(F) = LO インダクタの電圧
(G) = LO インダクタの電流
(A)
(B)
DS01207A_JP - ページ 16 © 2009 Microchip Technology Inc.

AN1207
回路設計方程式と部品の選定
前述したように、連続モードの場合、入力/出力の関係は式 50 と等しくなります。非連続モードにおけるこの関係は、式 54 と等しくなります。 大のオン時間は、 少の入力電圧、VDC と符合します。
デューティ サイクルを式 54、TON + TF = kT < T (0 <k < 1) が成立するよう選択できます。
式 47 と式 49 を組み合わせ、前記の TON + TF の定義を使用することで、TON, max の方程式が式 55 に示したように与えられます。 大デューティ サイクルの結果は、式 56 で表されます。
式 55:
式 56:
インダクタ
式 54 を使用すると、インダクタ L1 が計算できます。 大の TON、 少の VDC と 少の RO とすると、式 57 のようになります。
式 57:
出力キャパシタ
出力キャパシタは、TON の間、 大の許容出力リップルを超える電圧降下を生じることなく、出力電流を供給できる必要があります。
キャパシタは大きいので、指数の放電を線形で近似することも可能です。キャパシタからの電流は、平均出力電流(IO, av, nom) でTONの間の充電の損失は、式 58 と等しくなります。したがって、電圧降下は式 59 と等しくなります。
式 58:
式 59:
これを簡略化したものが式 60 となります。
式 60:
ダイオード
TON の間、D1 は、式 61 に示したように 大逆電圧でオープンの状態です。
式 61:
TOFF の間における D1 の平均電流は、式 62 で表されます。
式 62:
MOSFET
図 13 で示した平均電流は、式 63 で表されます。
式 63:
図 12 で示した 大電圧は、式 64 で表されます。
式 64:
TON max,kT VOUT VDC min,–( )
VOUT----------------------------------------------------=
Dmaxk VOUT VDC min,–( )
VOUT------------------------------------------------=
L1kRO min, Dmax
2FPWM---------------------------------
VDC min,VOUT
--------------------⎝ ⎠⎛ ⎞
2=
QON IO av nom,, TON=
VDROP on,IO av nom,, TON
C---------------------------------- VRIPPLE<=
CIO av nom,, TON
VRIPPLE---------------------------------->
VR max, V– OUT VQ on,+=
ID av, IO av nom,,TFTT------=
IQ1 av, IO av nom,,TON
T----------=
VQ max, VOUT VD+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 17

AN1207
順方向コンバータ
順方向コンバータのトポロジを図 16 に示しています。これは、スイッチの 1 つがダイオードで置き換えられたプッシュプル コンバータの直接の派生であると考えられます。結果としてコストが通常削減されるため、このトポロジは非常に一般的になっています。
図 16: 順方向コンバータ トポロジ
トポロジ方程式
『AN1114』(「はじめに」を参照 ) の順方向コンバータの章を参照すると、システムの動作が簡潔に要約されています。スイッチは、図 17 に示すようにデューティ サイクルが 50% より小さい波形によって駆動されています。
図 17: Q1 MOSFET 命令信号タイミング
COD3
LO
VOUTNS
D2
ROVS
VA VB
A B
Q1
NP
NR
VR
VP
D1
VDC
VL
Q1 Command
TOFF
TON
TR
DS01207A_JP - ページ 18 © 2009 Microchip Technology Inc.

AN1207
Q1 オン (INTERVAL 0 - TON)この構成の回路は、図 18 に示すようになります。
図 18: 順方向コンバータ トポロジ : INTERVAL 0 - TON
入力回路の動作
入力電圧は巻線 NP に直接接続されているため、結果的に巻線 NP の点側の端が、点のない端に対して正極になります。同様に、NR の点側の端が、ない側よりも高電圧になります。ダイオード D1 は、逆バイアスで、巻線 NR へ流れ込む電流はありません。巻線 NP の電圧は、式 65 で表されます。
式 65:
巻線 NR の電圧は、式 66 で表されます。
式 66:
NP の巻線とスイッチ Q1 の回路に流れる磁化電流(2 次巻線がオープンの場合には、トランスに流れ込む電流 ) は、式 67 と等しくなります。
式 67:
大値が TON に到達する右上がりの傾斜は、式 68で表されます。
式 68:
NP へ流れる総電流は、磁化電流と主にトランスを通して誘起される出力電流の合計になります。
出力回路の動作
1 次側巻線における電圧極性のため、2 次巻線は、点側の端が、点のない端に対して正極になります。結果的に、D2 は順方向バイアスになり、D3 は逆バイアスになります。
2 次側の巻線の電圧は、式 69 で表されます。
式 69:
整流ダイオード D2 の右側の電圧は、式 70 で表されます。
式 70:
出力インダクタの電圧は、式 71 で表されます。
式 71:
出力インダクタと D2 に流れる電流は、式 72 で表されます。
COD3
LO
VOUTNS
D2
ROVS
VA VBA B
Q1
NP
NR
VR
VP
D1
VDC
VL
VP on, VDC VQ on,–=
VRNRNP-------VP on,
NRNP------- VDC VQ on,–( )==
IM t( )VPLM-------t
VDC VQ on,–
LM-------------------------------t= =
IM TON( )VDC VQ on,–
LM-------------------------------TON=
VSNSNP------- VDC VQ on,–( )=
VB VS VD on,NSNP------- VDC VQ on,–( ) VD on,–=–=
VLNSNP------- VDC VQ on,–( ) VD on, VOUT––=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 19

AN1207
式 72:ここでは、1 次側に流れる総電流が計算できます。これには、磁化電流 ( 式 67 を参照 ) と式 73 で表される 1次側に誘起される負荷電流の 2つの負荷があります。
式 73:
Q1 オフ [INTERVAL TON - (TON + TR)]この構成を基準にすると、回路は、図 19 に示すようになります。
図 19: 順方向コンバータ トポロジ : INTERVAL TON - (TON + TR)
IL t( ) IL 0( )
NSNP------- VDC VQ on,–( ) V– D on, VOUT–
LO----------------------------------------------------------------------------------t+=
IP total, IL 0( )VDC VQ on,–
LM-------------------------------t
NSNP-------
NSNP------- VDC VQ on,–( ) V– D on, VOUT–
LO----------------------------------------------------------------------------------t+ +=
COD3
LO
VOUTNS
D2
ROVS
VA VB
A B
NP
NR
VR
VP
D1
VDC
Q1
VL
DS01207A_JP - ページ 20 © 2009 Microchip Technology Inc.

AN1207
入力回路の動作
Q1 がオープンとなる前に、磁化された電流が NP に流れています。スイッチがオープンになると、全電圧は、電流を流し続けるために反転します。NR の点のある端は、点のない端に対して負極になります。そして、巻線 NP でも同様の動作になります。NR の極性のために、ダイオード D1 は、順方向バイアスになり、NR の点のある側の端の電圧を維持します。1 つのダイオードがグランドより低下します。図 19 に表したように、磁化電流が NR とダイオード D1 を通して電源 VDC に流れます。VR と NR の電圧は、式 74 で表されます。
式 74:
NP の電圧は、式 75 で表されます。
式 75:
t = TON のとき、式 76 に示したように、リセット巻線の電流は、磁化電流 IM と巻線量を乗算したものと等しくなります。
式 76:
TR の間、この電流は下降し、 t = TON + TR のときにゼロに到達します。
出力回路動作
前記のように、磁化電流は、スイッチ Q1 がオフしたときに全電圧を反転します。結果として、2 次巻線の点側の端は、点のない端よりも負極になり、ダイオード D2 は逆バイアスになります。
2 次側の電圧は、式 77 で表されます。
式 77:
インダクタ LO に電流を流し続けるために、電圧は反転し、インダクタの左端は右端よりも負となって、減少し続けます。しかし、フリーホイール ダイオード D3 は、順方向バイアスになり、ダイオード電圧への VB をグランドより低く設定します。インダクタの電圧は、式 78 と等しくなります。
式 78:
式79によると、インダクタ電流は減少を継続します。
式 79:
この電流は、フリーホイール ダイオード D3 に流れる電流と同一です。
VR VDC VD on,+( )– 0<=
VP off,NPNR-------– VDC VD on,+( ) 0<=
IRNPNR-------IM=
VS off,NSNR-------– VDC VD on,+( )=
VL V– OUT VD on,–=
IL t( ) I TON( )VOUT VD on,+
LO----------------------------------t–=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 21

AN1207
Q1 オフ [INTERVAL (TON + TR) TO T]この構成の回路は、図 20 で表したようになります。
図 20: 順方向コンバータ トポロジ : INTERVAL (TON + TR) - T
入力回路動作
磁化電流がゼロに到達する(TON + TR)とすぐに、TON時にトランスに蓄えられた全エネルギーが解放されて、ダイオード D1 がオープンとなります。結果的に、NR の電圧降下はゼロになり、NR の点側の端とない側の端の両電圧がVDCと等しくなります。NPの電圧降下がゼロに等しくなり、スイッチに加えられる電圧は VDC となります。
出力回路の動作
以前のインターバル時間に比べて変化はありません。
回路設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
安定状態の出力では、インダクタ LO の t = 0 における電流は、 t = T における電流と等しい必要があります。式 72 と式 78 を基準にしてインダクタ電流の関数としてインダクタ電流を表すと、式 80 となり、展開して解くと式 81 になります。
式 80:
式 81:
時間 t = 0 と t = TON + TR における磁化電流はゼロです ( 安定状態において )。したがって、 TON の間の∆IM はTRの間の∆IMと等しくなり、式82で表されます ( 式 65 と式 75 を参照 )。
式 82:
回路は、TR が TOFF と等しいとき、 大のデューティ サイクルで動作しています。つまり、磁化電流を無効にするために全 TOFF 期間が必要であることを意味します。この場合、式 82 における TR は大の理論上の値である TOFF に置き換えられ、TON,max は式 83 で表され、式 84 から求められます。
式 83:
式 84:
NR = NP, Dmax の場合、理論値 = 0.5 です。
COD3
LO
VOUTNS
D2
ROVS
VA VB
A B
NP
NR
VR
VP
D1
VDC
Q1
VL
NSNP------- VDC VQ on,–( ) V– D on, V– OUT
LO------------------------------------------------------------------------------- TON =
VOUT VD on,+
LO----------------------------------TOFF=
VOUTNSNP------- VDC VQ on,–( )D VD on,–=
VDCLM
----------TONNPNR-------
VDCLM
----------TR TON⇒NPNR-------TR= =
TON max,NPNR-------TOFF TON max,
NPNR------- T TON max,–( )=⇒=
Dmax theoretical,1
1NRNP-------+
----------------=
DS01207A_JP - ページ 22 © 2009 Microchip Technology Inc.

AN1207
トランス : 1 次側
動作中のトランスの中心は、ヒステリシス カーブの 初の四分円に移動します。
流動率が変化し、ファラデーの法則によれば、式 85に示したように、印加電圧 VP とこの電圧が存在する間の時間 TX の積に比例します。
式 85:
TON の間、この積は等しく (VDCTON)、TR の間は式65 と式 75 を基準に、VQ,on と VD, on を無視するとNPVDC(TR)/NR となります。
図 22 (F) において、積 (VDCTON) は、A1 領域と等しく、VDCNPTR/NR は A2 領域と等しくなります。
実質 ∆B = 0 が望ましいので、ヒステリシス平面での PWM 周期の終わりにおける動作点は、初期位置に戻ってきます。このことは、システムが飽和に向かって逸脱しないことを保証します。
重要な点は、2 つの巻線に異なる巻き数を選択することにより、さまざまな NP/NR 比率で条件が簡単に満たされるということです ( 図 21 を参照 )。このため、システムの回路が更に自由に設計できるようになります。
一般的に TON + TR = kT、TON の 大値は、NP = NRのときに、TON, max = kT/2 として選択されます。図21 に示したように、TON の 大値もまた、NP/NR の量に依存します。トランスのコアの特性を基準に、∆B が定義されます。式 85 から、1 次側の巻き数が決定されます。VDC の 少値を考慮すると、結果的に、 大のデューティ サイクルは、式 86 で表されます。
式 86:
式 81 の NP を置き換えて VD を無視すると、結果は、式 87 となります。
式 87:
NR は、図 21 に示す動作を考慮して決定されます。
B∆VP TX⋅
NP Acore--------------------=
∆B の単位は Tesla で Acore の単位は m2 です。NP
DmaxFPWMAcore B∆------------------------------------ VDC min, VQ on,–( )=
NSVOUT
FPWMAcore B∆------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 23

AN1207
図 21: 順方向コンバータ : 1 次側とリセット巻線数の異なる値のための MOSFET の電圧
t
t
t
t
A1
A2
A1
A2
A1
A2
TON
TON
TON
TR
TR
TR
T
T/2 T/2
VDC
VDC
VDC
1NPNR-------+
⎝ ⎠⎜ ⎟⎛ ⎞
VDC 2VDC>
1NPNR-------+
⎝ ⎠⎜ ⎟⎛ ⎞
VDC
1NPNR-------+
⎝ ⎠⎜ ⎟⎛ ⎞
VDC 2VDC<
NP = NR
NP > NR
NP < NR
DS01207A_JP - ページ 24 © 2009 Microchip Technology Inc.

AN1207
図 22: 順方向コンバータ波形 (NP = NR): 1 次側
TON
TR
TON + TR TTON
A2
A1
Q1 Command
VP
VR
IR = ID1
VQ1
IP IQ, mr
(A)
(B)
(C)
(D)
(E)
(F)
(G)
t
t
t
t
t
t
t
IM
1NPNR-------+⎝ ⎠
⎛ ⎞ VDC
(A) = 命令信号と Q1 MOSFET ゲート (B) = 1 次側巻線 NP の電圧 VP
(C) = 磁化電流 IM(D) = リセット巻線 NR の電圧 VR
(E) = リセット巻線の電流、ダイオード D1 電流と同じ
(F) = Q1 MOSFET の電圧
(G) = 1 次側巻線の電流、Q1 MOSFET 電流と同じ
VDC
VDC – VQ, on
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 25

AN1207
トランス : 1 次、ワイヤ サイズ
図 22 に示したように、1 次側に流れ込む総電流には 2 つの寄与があります。それは磁化電流 ( 式 67)と 1 次側に励起されて戻る負荷電流 ( 式 72) で、式88 となります。
式 88:
1 次側のワイヤ サイズは、まず図 22 (G) を参照し、実際の電流波形を、幅が同一で、振幅が傾斜の中間の値 (IQ, mr) の方形波パルス波形に置き換えることで計算できます。電流は、既知 ( 設計仕様 ) データの関数として表されます。
トランスは、負荷励起電流のおよそ 1/10 となるよう設計されているので、これらの計算では、磁化電流は無視されることに注意してください。したがって、入力電力 PI は式 89 と等しくなります。
式 89:
出力電力は、式 90 で表されます。
式 90:
式 90 を解くと、式 91 となります。
式 91:
これは、TON が許容される 大の値のときに、1 次側のワイヤに流れ込む電流と等しくなります。rms値は、式 92 で計算されます。
式 92:
これによって、正しい AWG ( ワイヤ サイズ ) が計算できます。
トランス : 2 次、ワイヤ サイズ
図 24 (C) に表したように、2 次電流は、TON 期間のインダクタ電流 (IO, av) と等しくなります。1 次側の電流の場合と同様に、実際の電流波形を振幅がインダクタ電流の上昇傾斜の中間の値 (IO, av, nom) と等しい値である方形波パルス波形で置き換えます。
したがって、2 次側の平均電流は式 93 と等しくなります。
式 93:
rms 値は、式 94 で計算されます。
式 94:
トランス : リセット巻線、ワイヤ サイズ
リセット巻線は、2 次側から 1 次側への励起戻りする電流の伝搬には関係しません。この巻線が伝搬する電流は磁化電流で、図 22 (C) に図示されています。式 67 で計算された磁化ピーク電流は、式 95 で表されます。
式 95:
式 96 に示したように、rms は、ピーク値をデューティ サイクルの平方根と掛け合わせ、3 の平方根で割った値になります。
式 96:
IP total,VDC VQ on,–
LM-------------------------------t
NSNP-------
NSNP------- VDC VQ on,–( ) V– D on, VOUT–
LO----------------------------------------------------------------------------------t+=
PI VDC min, IQ mr, Dmax=
PO ηPI ηVDC min, IQ mr, Dmax= =
η は、コンバータの効率です。
IQ mr,1η---
POVDC min,--------------------⎝ ⎠
⎛ ⎞ 1Dmax-------------=
IQ rms, IQ mr, Dmax1η---
POVDC min,--------------------⎝ ⎠
⎛ ⎞ DmaxDmax
-----------------= =
IS av, IO av nom,,=
IS rms, IO av nom,, Dmax=
IM pk,VD C min,( ) VQ on,–
LM---------------------------------------------TON=
IM rms,VDC min, VQ on,–( )
LM----------------------------------------------
Dmax
3-----------------TON=
DS01207A_JP - ページ 26 © 2009 Microchip Technology Inc.

AN1207
MOSFETTOFF 期間、Q スイッチの電圧は、式 97 と等しくなります。
式 97:
t = TON の場合、漏れ電流によるスパイクが現れます。これは、式 98 に表したように、安全を考慮してピーク電流の 30% として概算できます。
式 98:
スイッチを流れる平均電流は、式92で計算されます。
ダイオード
表 1 は、ダイオードが対処する平均電流と電圧の値を要約しています。
表 1: ダイオード電流と電圧
VQ off, 1NPNR-------+⎝ ⎠
⎛ ⎞ VDC=
VQ off max,, 1.3 1NPNR-------+⎝ ⎠
⎛ ⎞⋅ VDC max,=
ダイオード構成
0 - TON TON - (TON + TR) (TON + TR) - T
D1
D2
D3
記号の説明 : VF は、ダイオードの順方向電圧です。
VD max, 1NRNP-------+⎝ ⎠
⎛ ⎞– VDC max,= VF VD max, V– DC max,=
VF VD max,NSNR-------– VDC max,≈ VD max, 0≈
VD max,NSNP-------– VDC max,≈ VF VF
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 27

AN1207
出力フィル タインダクタ
出力に LC ローパス フィルタを持つ、その他すべてのトポロジでは、システムを非連続モードで動作させないようインダクタが選択されています。インダクタは、連続モードと非連続モード(例えばクリティカル モード ) の間の端で計算されていて、インダクタ電流は、PWM周期の初めでゼロから開始し、PWM周期の前でゼロに戻ります。この条件の場合、図 23に示したように、平均電流はピーク電流の 0.5 と等しくなります。
図 23: インダクタ電流 : ピーク電流、リップル電流振幅、そして非連続モードの端における出力電流
クリティカル モードにおいては、 少許容出力電流 ( 設計仕様によって決定 ) は、式 99 に示したように、平均電流と一致します。
式 99:
式 72 を使用して IO, ripple を計算すると、結果は式100 になります。
式 100:
出力キャパシタ
出力電圧リップルは、主にキャパシタ ESR によるものです。それを流れるインダクタ電流リップルは、電圧降下によって決定します。したがって、式101と等しいESRを持つキャパシタを選ぶ必要があります。
式 101:
キャパシタ値自体は式 102 で計算でき、これはすべての部品を考慮に入れた電圧リップルの値を表しています。
式 102:
ESLは通常とても小さい (PWMの周波数が少なくとも 400 KHz 未満 ) ので、これを無視すると、式 103となります。
式 103:
TON
IRIPPLE
TON + TRt
IO, av, min
IO, PN
I Inductor
IO av min,,IO ripple,
2--------------------=
LO
NSNP-------VDC min, V– OUT
2FPWMIO av min,,----------------------------------------------Dmax=
ESRVOUT ripple,
IO ripple,-----------------------------<
IO, ripple は式 98 で計算されます。
Vripple Iripple ESRDmax
FPWMC-------------------
ESL FPWM⋅Dmax
------------------------------+ +⎝ ⎠⎛ ⎞=
COIO ripple, Dmax
FPWM VOUT ripple, IO ripple, ESR–( )----------------------------------------------------------------------------------------=
DS01207A_JP - ページ 28 © 2009 Microchip Technology Inc.

AN1207
図 24: 順方向コンバータ波形 : 2 次側
VS
IS = ID2
IO, av
VB = VD3
VD2
VL
IL
ID3
t
t
t
t
t
t
t
t
T
TON
TR
TOFF
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
(A) = 命令信号と Q1 MOSFET ゲート
(B) = 2 次側巻線 NS の電圧 VS
(C) = 2 次側巻線の電流、ダイオード D2 電流と等しい
(D) = ノード B の電圧
(E) = ダイオード D2 の電圧
(F) = LO インダクタの電圧
(G) = LO インダクタの電流
(H) = ダイオード D3 の電流
Q1 Command
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 29

AN1207
2 スイッチ順方向コンバータ
この回路は、明確に単一端トポロジ(順方向コンバータ ) から派生しているため、単一端順方向コンバータに対して大きな利点があります。このトポロジの回路図を図 25 に表しました。
図 25: 2 スイッチ順方向コンバータ トポロジ
トポロジ方程式
『AN1114』(「はじめに」を参照 ) の「2 スイッチ順方向コンバータ」の章を参照すると、はじめに基本的な方程式が再確認され、その後に回路部品の選択が続いています。図 26 に示したように、Q1、Q2 の両スイッチが、デューティ サイクルが 0.5 より小さい方形波信号によって同時に駆動されます。
図 26: 信号駆動スイッチ Q1 と Q2
COD4
LO
VOUTNS
D3
VS
VB
Q2
NP
D1
VDC
Q1
D2
VL
T
TR
TONQ1 CommandQ2 Command
DS01207A_JP - ページ 30 © 2009 Microchip Technology Inc.

AN1207
Q1 オン、Q2 オン (INTERVAL 0 - TON)この構成の回路は、図 27 に表したようになります。
図 27: 2 スイッチ順方向コンバータ トポロジ : INTERVAL 0 - TON
入力回路の動作
トランスは、VDC とグランド間に接続されています。点側の端が、点のない端よりも正極で、磁化電流が流れます。1 次側の両方のダイオードは逆バイアスで、動作には寄与しません。
1 次側の電圧は、式 104 と等しくなります。
式 104:
トランスを流れる磁化電流は図30 (C)に表したように、右上がりに増加します。
式 105:
1 次側の総電流は、この磁化電流とトランスによって1 次側に励起して戻る 2 次電流を加算したものです。
出力回路の動作
1 次側と同様に、2 次側の巻線は、点のある端の電圧が点のない端に比べて高くなります。したがって、ダイオード D3 は順方向バイアスで、インダクタに対する電流を導通し、ダイオード D4 は逆バイアスになります。
2 次側の電圧は、式 106 と等しくなります。
式 106:
式 107 は、インダクタ電圧を表します。
式 107:
式 108 に表したように、インダクタの電流は、線形に増加するよう動作します ( 図 31 (E) も参照 )。
式 108:
ここでは、1 次側巻線の総電流は、式 109 に表したように、磁化電流と 1 次側に励起して戻る 2 次側の電流 ( 図 30 (F) を参照 ) の合計として計算できます。
式 109:
COD4
LO
VOUTNS
D3
VS
VB
Q2
NP
D1
VDC
Q1
D2
IPRIMARY
VL
VP VDC 2VQ on,–=
IM t( )VDC 2VQ on,–( )
LM---------------------------------------t=
VSNSNP------- VDC 2VQ on,–( )=
VLNSNP------- VDC 2VQ on,–( ) V– D on, V– OUT=
IL t( ) IL 0( )
NSNP------- VDC 2VQ on,–( ) V– D on, V– OUT
LO-----------------------------------------------------------------------------------t+=
IP total, t( ) IL 0( )VDC 2VQ on,–( )
LM---------------------------------------
NSNP-------
NSNP------- VDC 2VQ on,–( ) V– D on, V– OUT
LO-----------------------------------------------------------------------------------t+ +=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 31

AN1207
Q1 オフ Q2 オフ (INTERVAL TON TO (TON + TR))両スイッチがオフのとき、NP の磁化電流はシステムの全電圧を反転します。1 次側においては、インダクタで点のない側の端が、点側の端に対して正極になります ( 図 28 を参照 )。両方のダイオードが、順方向バイアスで、漏れ電流の経路となり、1 次側の点のない側の端から、D2 を通り、VDC の正側に流れ、負のワイヤからダイオード D1 を通って再びトランスに戻ります。
図 28: 2 スイッチ順方向コンバータ トポロジ : INTERVAL TON - (TON + TR)
1 次側の電圧は、式 110 と等しくなります。
式 110:
磁化電流は、式 111 のように表されます。
式 111:
磁化電流は、TON + TR、 (TON + TR) < T の時間でゼロに到達します ( これは、TON 期間に 1 次側のトランスに蓄積されたすべてのエネルギーが、VDC 入力に戻されたということです )。
出力回路動作
磁化電流により、電圧極性が変化するため、誘導される 2 次側の電圧極性は、巻線で点のない側の端が、点のある端よりも正極になります。その間、出力インダクタの電圧の極性も同様に変化、左側が非常に負 ( 低く ) になろうとします。しかし、順方向バイアスであるダイオード D4 により、グランド レベルからダイオードの電圧降下のところでクランプされます。反対側の D3 は、逆バイアスになります。インダクタ電流は、ダイオード D4、負荷、そして出力キャパシタを通る経路を持ちます。
式 112 は、2 次側の電圧を表します。
式 112:
式 113 は、インダクタ電流を表します。
式 113:
式 114 は、電流を表します。
式 114:
COD4
LO
VOUTNS
D3
VS
VB
Q2
NP
D1
VDC
Q1
D2
VL
VP
VP off, VDC 2VD on,+( )–=
IM t( )VDC 2VD on,+( )–
LM-------------------------------------------t=
VSNSNP-------– VDC 2VD on,+( )=
VL V– OUT VD on,–=
IL t( )VOUT VD on,+( )–
LO-------------------------------------------t=
DS01207A_JP - ページ 32 © 2009 Microchip Technology Inc.

AN1207
Q1 オフ Q2 オフ (INTERVAL (TON + TR) TO T)(TON + TR) to T のところで示したように、1 次側のトランスにはエネルギーはなく、磁化電流はゼロで、結果的に 2 つのダイオード D1 と D2 は逆バイアスとなるために導通していません。
この構成の回路図は、図 29 に表したようになります。電圧 VP と VS は両方ゼロで、スイッチの電圧は VDC より小さくなります。2 次側に変化はありません。
図 29: 2 スイッチ順方向コンバータ トポロジ : INTERVAL (TON + TR) - T
設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
入力/出力の関係は、t = TON と t = TOFF のそれぞれで、式 108 と式 114 が等しいことから求めると、式115 で表されます。
式 115:
VD と VQ を無視すると、デューティ サイクルは式116 に表したように決定できます。
式 116:
大の理論値のデューティ サイクル ( 式 117) は、2つの磁化電流 ( 式 105 と式 111) が等しく、TR = TOFFのときに TR が 大となることを考慮して得ることができます。
式 117:
もちろん実際のデューティ サイクルは、計算に許容量を考慮すると、 大の理論値よりもいくらか小さな値になります。
トランス : 1 次側
式 118 に表したファラデーの方程式から求めた 1 次側の巻線数は、式 119 となります。
式 118:
式 119:
COD4
LO
VOUTNS
D3
VS
VB
Q2
NP
D1
VDC
Q1
D2
VL
VP
VOUTNSNP------- VDC 2VQ on,–( )D VD on,–=
VOUTNSNP-------VDC D=
Dmax theoretical, 0.5=
B∆VPTON
NPAcore--------------------=
NPVDC min, 2VQ on,–( )Dmax
FPWMAcore B∆---------------------------------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 33

AN1207
トランス : 1 次側、ワイヤ サイズ
トランスに流れる電流は、図 30 (F) の電流を傾きの中間値で代替させた一定の振幅 (IP, mr) を持つ等価な波形で置き換えることで計算できます。
式 120 ( 入力電力の間 ) と式 121 ( 出力電力 ) の関係を考慮すると、結果は式 122 となります。したがって、rms 値は式 123 と等しくなります。
式 120:
式 121:
式 122:
式 123:
トランス : 2 次側
巻線数は式 115 と式 119 によって決定され、結果は、式 124 になります。
式 124:
トランス : 2 次側、ワイヤ サイズ
図 31 (C) を参照すると、2 次側の巻線に流れる電流が決定します。階段状の電流波形の傾斜は、およそ一定の振幅信号となり、振幅は IO, av, nom となります。これらに基づくと、相当する rms 値は式 125 と等しくなります。
式 125:
MOSFET
TOFF の間、スイッチが許容する必要のある 大電圧は、式 126 に表されます。
式 126:
TON 期間の 大電流は、式 127 に表されていて、トランスに流れる電流と同一です。
式 127:
PO ηPI=
PI VDC min, IP mr, Dmax=
IP mr,PO
ηVDC min, Dmax--------------------------------------=
IP rms, IP mr, Dmax=
NSVOUT
FPWMAcore B∆------------------------------------=
ISECONDARY rms, IO ar nom,, Dmax=
VQ max, VDC max,≈
IP mr,PO
ηVDC min, Dmax--------------------------------------=
DS01207A_JP - ページ 34 © 2009 Microchip Technology Inc.

AN1207
図 30: 2 スイッチ順方向コンバータ波形 : 1 次側
(A)
(B)
(C)
(D)
(E)
(F)
t
t
t
t
t
t
TR
Q1 Command
VP
IM
VD1, VD2
TON TQ2 Command
IP
VQ1, VQ2
(A) = Q1 と Q2 MOSFET ゲートの命令信号
(B) = 1 次側巻線 NP の電圧 VP
(C) = 磁化電流 IM(D) = Q1 と Q2 MOSFET の電圧
(E) = ダイオード D1 と D2 の電圧
(F) = 総 1 次側電流 IP ( 磁化電流と 1 次側のトランスに励起されて戻る負荷電流 )
IP, mr
VDC
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 35

AN1207
図 31: 2 スイッチ順方向コンバータ波形 : 2 次側
(A)
(B)
(C)
(D)
(E)
t
t
t
t
t
(F)t
(G)t
(H)t
TR
Q1 Command
VS
ID3
VD4
ID4
T
IO, av, nom
TONQ2 Command
(A) = Q1 と Q2 MOSFET ゲートの命令信号
(B) = 2 次側巻線 NS の電圧 VS
(C) = 2 次側巻線 NS に流れる電流
(D) = インダクタ LO の電圧
(E) = インダクタ LO に流れる電流
(F) = ダイオード D3 に流れる電流
(G) = ダイオード D4 の電圧
(H) = ダイオード D4 に流れる電流
TON + TR
IS
VL
IL
IO, av, nom
DS01207A_JP - ページ 36 © 2009 Microchip Technology Inc.

AN1207
ダイオード
表 2 は、ダイオード電圧を求めるための計算を表しています。
表 2: ダイオード電圧
表 3 は、平均ダイオード電流を求めるための計算を表しています。
表 3: ダイオード電流
ダイオード構成
0 - TON TON -> (TON + TR) (TON + TR) -> T
D1
D2
D3
D4
記号の説明 : VF はダイオードの順方向電圧です。
VR V– DC max, VQ on,+= VF VRV– DC max,
2------------------------=
VR V– DC max, VQ on,+= VF VRV– DC max,
2------------------------=
VF VRNSNP------- VDC max, 2VD on,+( ) VD on,+= VF≅
VRNSNP------- VDC max, 2VQ on,–( ) VD on,+= VF VF
ダイオード構成
0 - TON TON -> (TON + TR) (TON + TR) -> T
D1
D2
D3
D4
0PO
ηVDC min, Dmax-------------------------------------- 0
0PO
ηVDC min, Dmax-------------------------------------- 0
IO av nom,, 0 0
0 IO av nom,, IO av nom,,
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 37

AN1207
出力インダクタンス
出力インダクタは、出力電流が 少要件 (IO, av, min)の場合に、非連続モードの端とになるように計算されます。
順方向コンバータのと同じアプローチを使用し ( 図26、式 99、式 100 を参照 )、式 108 と式 128 から(MOSFET とダイオードの電圧降下を無視して )、式129 が得られます。
式 128:
式 129:
出力キャパシタンス
キャパシタンスは、 少の出力電圧リップルを達成するため、電流リップルの周波数で可能な限り 少のインピーダンスである必要があります。
電圧リップルは、出力キャパシタの ESR と電流が流れることによる CO の電圧降下によって決定します ( 式 130 を参照 )。
式 130:
出力キャパシタの値は、式 131 から求められます。
式 131:
IO av min,,IO ripple,
2--------------------=
LO
NSNP-------VDC min, V– O⎝ ⎠
⎛ ⎞ Dmax
2FPWMIO av min,,----------------------------------------------------------=
VOUT ripple, ESR IO ripple,1
CO-------IO ripple,
DFPWM---------------+⋅=
COIO ripple, Dmax
FPWM VOUT ripple, IO ripple, ESR–( )----------------------------------------------------------------------------------------=
DS01207A_JP - ページ 38 © 2009 Microchip Technology Inc.

AN1207
ハーフブリッジ コンバータ
回路設計方程式
図 32 は、ハーフブリッジ コンバータの回路図を表しています。システム動作の詳細なついては、『AN1114』(「はじめに」を参照 ) の「ハーブブリッジ コンバータ」の章をご参照ください。
この波形 ( 調整可能な幅と 180° 位相の遅延を持つ 2つのパルス ) は、図 33 に表した 2 つの Q トランジスタのゲートを駆動するために使用されます。1 つのパルスの立ち下がりエッジから別のパルスの立ち上がりエッジまでには、少しのマージンが必要です。これらの時間間隔は、TR と呼ばれます。これが実装されていないと、回路がショートしてしまい、VDC からグランドへの経路に高電流が流れて、スイッチが破損します。初期には、CB はショート回路に置き換えられます。
図 32: ハーフブリッジ コンバータ トポロジ
図 33: Q1 と Q2 の命令信号
COD4
LO
VOUT
NSD3
NS
VB
RO
Q1
Q2
C1
C2
NP
CB
D1
D2
VDC
VDC/2
VDC/2
VL
TR
Signal
Signal
T1ON
T2ON
TR
T
Driving Q1
Driving Q2
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 39

AN1207
Q1 オン、Q2 オフ
この構成の回路は、図 34 で表したようになります。
図 34: ハーフブリッジ コンバータ トポロジ : Q1 オン、Q2 オフ
入力回路動作
キャパシタ C1 の電圧により、1 次側回路における電圧は、点側の端が、点のない側の端よりも正極になります。
式 132 は、1 次側の電圧を表しています。
式 132:
式 133 は、磁化電流を表しています。
式 133:
出力回路動作
1 次側の電圧の極性により、2 次側の点側の端は点のない側の端よりも正極になります。ダイオードD4は逆バイアスで、D3 は順方向バイアスになります。
式 134 は、2 次側の電圧を表しています。
式 134:
式 135 は、インダクタ電圧を表しています。
式 135:
式 136 は、電流を表しています。
式 136:
COD4
LO
VOUT
D3
VS
VB
RO
C1
C2
D1
D2
VDC/2
VDC/2 Q2
Q1
VDC
NSNP
VL
VP
VPVDC
2---------- VQ1 on,–⎝ ⎠
⎛ ⎞=
IM t( )
VDC2
----------VQ1 on,
LM----------------------------t=
VSNSNP-------
VDC2
---------- VQ1 on,–⎝ ⎠⎛ ⎞=
VLNSNP-------
VDC2
---------- VQ1 on,–⎝ ⎠⎛ ⎞ VD3 on, VOUT 0>––=
IL t( ) IL 0( )
NSNP-------
VDC2
---------- VQ1 on,–⎝ ⎠⎛ ⎞ VD3 on, VOUT––
LO------------------------------------------------------------------------------------------t+=
DS01207A_JP - ページ 40 © 2009 Microchip Technology Inc.

AN1207
Q1 オフ、Q2 オン
この構成の回路は、図 35 に表したようになります。
図 35: ハーフブリッジ コンバータ トポロジ : Q1 オフ、Q2 オン
入力回路動作
この例では、1 次側巻線の電圧は点側の端が、点のない側の端よりも負極になります。
式 137 は、1 次側巻線の電圧を表しています。
式 137:
式 138 は、磁化電流を表しています。
式 138:
出力回路動作
1 次側と同様に、2 次側巻線の電圧は点側の端が、点のない側の端の電圧よりも負極になります。結果として、D3 はオープンに、D4 は順方向バイアスになります。
式 139 は、2 次側の電圧を表しています。
式 139:
式 140 は、インダクタ電圧を表しています。
式 140:
式 141 は、電流を表しています。
式 141:
COD4
LO
VOUT
D3 VB
RO
C1
C2
D1
D2
VDC/2
VDC/2 Q2
Q1
VL
VS
NSNP
VDC
VPVDC
2----------– VQ on,+=
IM t( )
VDC2
----------– VQ on,+
LM------------------------------------t=
VSNSNP-------
VDC2
---------- VQ on,+–⎝ ⎠⎛ ⎞=
VLNSNP-------
VDC2
---------- VQ on,–⎝ ⎠⎛ ⎞ VD on, VOUT––=
IL t( ) IL TON( )
NSNP-------
VDC2
---------- VQ on,–⎝ ⎠⎛ ⎞ V– D on, VOUT–
LO----------------------------------------------------------------------------------t+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 41

AN1207
Q1 オフ、Q2 オフ (PERIOD TR)この構成の回路は、図 36 に表したようになります。
図 36: ハーフブリッジ コンバータ トポロジ : Q1 オフ、Q2 オフ
入力回路動作
この例において、Q1 がオフ ( 図 37) と Q2 がオフ( 図 38) での 1 次側の電流経路を次に示します。
図 37: ハーフブリッジ コンバータ : Q1 がオフのときの 1 次側電流経路
図 38: ハーフブリッジ コンバータ : Q2 がオフのときの 2 次側電流経路
出力回路動作
両方のスイッチがオフのとき、2 次側にある 2 つの巻線の電圧は、順方向バイアスの D1、D2 と同一で導通しています。電流は、それらの間で均等に分割されて、それぞれにインダクタに流れる電流の 1/2が流れます。電流の波形は、図40に表されています。
式 142 は、インダクタの電圧を表しています。
式 142:
式 143 は、それに流れる電流を表しています。
式 143:
COD4
LO
VOUT
D3 VB
RO
C1
C2
D1
D2
VDC/2
VDC/2 Q2
Q1
VDC
VS
NSNP
VL
C1
C2
NPD5
D6
VDC/2
VDC/2 Q2
Q1
VDC
< 0
C1
C2
NP
D5
D6
VDC/2
VDC/2 Q2
Q1
VDC
> 0
VL V– OUT=
IL t( )V– OUTLO
-----------------t=
DS01207A_JP - ページ 42 © 2009 Microchip Technology Inc.

AN1207
図 39: ハーフブリッジ コンバータ波形 : 1 次側
(A)
(B)
(C)
(D)
(E)
(F)
t
t
t
t
t
(G)
t
t
Q1
VP
VQ1
IQ1
VQ2
IQ2
T
Command
TON TRTON
TR
Q2Command
(A) = Q1 MOSFET ゲートの命令信号
(B) = Q2 MOSFET ゲートの命令信号
(C) = 1 次側巻線 NP の電圧 VP
(D) = Q1 MOSFET の電圧
(E) = Q1 MOSFET に流れる電流
(F) = Q2 MOSFET の電圧
(G) = Q2 MOSFET に流れる電流
VDC/2
-VDC/2
VDC/2VDC
IP, mr
VDC
VDC/2
IP, mr
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 43

AN1207
図 40: ハーフブリッジ コンバータ波形 : 2 次側
Q1 Command
Q2 Command
VS
VD3
ID3
VD4
ID4
VL
IL
IO, av, nom
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
(I)
t
t
t
t
t
t
t
t
t
(A) = Q1 MOSFET ゲートの命令信号
(B) = Q2 MOSFET ゲートの命令信号
(C) = 2 次側巻線 NS の電圧 VS
(D) = ダイオード D3 の電圧
(E) = ダイオード D3 に流れる電流
(F) = ダイオード D4 の電圧
(G) = ダイオード D4 に流れる電流
(H) = インダクタ LO の電圧
(I) = インダクタ LO に流れる電流
-NS/NP VDC/2
NS/NP VDC
NP/NS VDC/2
DS01207A_JP - ページ 44 © 2009 Microchip Technology Inc.

AN1207
回路設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
安定状態において、TON 期間のインダクタ電流の増加は、式 144 に表したように、TR ( ダイオードの順方向電圧降下を無視 ) 期間の減少と等しい必要があります。
式 144:
結果として、PWM 周期には 2 つのパルスがあり、大の理論上のデューティ サイクルは、Dmax,
theoretical = 0.5 となります。もちろん 2 つのスイッチでの貫通電流を避けるため、 少入力電圧に対応する 大のデューティ サイクルは、より小さくなります。
トランス : 1 次側
トランスのコアが定義されると、式 145 に表したように、1 次側巻線数がファラデーの法則から計算でき、結果は式 146 になります。
式 145:
式 146:
トランス : 1 次側、ワイヤ サイズ
1 次側巻線に流れる電流は、図 39 (E と G) のように図示できます。これは、1 次側の巻線に流れる磁化電流と、トランスの巻線比によって励起して戻る 2次側の負荷電流との合計になります。
計算を簡潔にするために、実際の電流の波形を中間の傾きの値(IP, mr) に置き換えて入力(PI)と出力(PO)の電力を考慮し、その値を求めます。
式 147 は、入力電力を表しています。
式 147:
式 148 は、出力電力を表しています。
式 148:
これらの 2 つの式を計算すると結果は、式 149 になります。
式 149:
式 150 は、rms 値を表しています。
式 150:
トランス : 2 次側、巻線数、ワイヤ サイズ
2 次側の巻線数を式 151 に表し、これは、式 144 と式 146 から求められます。
式 151:
図 40 (I) の IO, av, nom で表される出力平均電流は、コンバータの回路設計の出力平均電流です。rms 2次電流 (IS) は、式 152 のとおりです。
式 152:
where , and
VOUTNSNP-------VDCD=
DTON
T----------= TON TR+( ) T
2---=
B∆VPTON
NP Acore--------------------=
NPVDC min, Dmax
2FPWMAcore B∆---------------------------------------=
PIVDC
2----------IP mr, 2D=
η は効率です。
PO ηPI=
IP mr,PO
ηVDC min, Dmax--------------------------------------=
IP rms, IP mr, Dmax=
NSVOUT
2FPWMAcore B∆---------------------------------------=
IS rms, IO av nom,, Dmax=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 45

AN1207
スイッチ
『AN1114』(「はじめに」を参照 ) の「ハーフブリッジコンバータ」の章を参照すると、ハーフブリッジコンバータ トポロジの主な利点の 1 つは、プッシュプル トポロジの 2 VDC と比較して、スイッチが大電圧である VDC を許容できることです。TON とTR 期間、Q1 と Q2 スイッチは、 大電圧、VQ, max= VDC, max に制約されます。
スイッチに流れる 大電流は、既に式 150 で計算されています。
出力インダクタンス
インダクタは、出力インダクタ電流が、非連続とならないように選択されます。
計算は、連続と非連続の動作間の端、TON の初めで出力がゼロから開始し、TR 期間の終わりでゼロに戻るときに実行されます。言い換えると、インダクタ電流のピーク ( 電流リップル DI でもある ) は、出力平均電流 ( 式 153 を参照 ) の倍になります。
式 153:
式 154 は、結果を表しています。
式 154:
出力キャパシタ
出力電圧リップルは、主に ESR によるもので、式155 になります。
式 155:
他のトポロジで説明してきたように、出力キャパシタの値は、式 156 に表した関係から決定されます。
式 156:
キャパシタ CB
キャパシタ CB ( 図 32 を参照 ) は、コアの飽和を避けるために、トランスに流れる電流の直流成分のブロックに使用されます。C1 と C2 の間のわずかな差が、それらの間の電圧にアンバランスを生じさせ、コアがヒステリシス ループに沿って動き、飽和する原因となります。
小さなキャパシタの存在が、1 次側電圧のわずかな降下の原因となります。TON 期間の電圧は、ほぼ線形に減衰していきます。
∆VD は 大の許容降下電圧とみなすと、式 157 となります。
式 157:
IO ripple, 2IO a v min,( ),
NSNP-------
VDC min,2
-------------------- VOUT–
LO------------------------------------------------TON= =
LO
NSNP-------
VDC min,2
-------------------- VOUT–
2FPWMIO av min,,------------------------------------------------Dmax=
VOUT ripple, ESR IO ripple,1
CO-------IO ripple,
DFPWM---------------+⋅=
COIO ripple, Dmax
FPWM VOUT ripple, IO ripple, ESR–( )----------------------------------------------------------------------------------------=
CBIP mr,
VD∆------------TON>
DS01207A_JP - ページ 46 © 2009 Microchip Technology Inc.

AN1207
プッシュプル コンバータ
プッシュプル コンバータは、入力を出力回路から分離するためにトランスを用います。
トポロジ方程式
図 41 は、プッシュプル コンバータの回路図を表しています。システムの動作の詳細は、『AN1114』(「はじめに」を参照 ) を参照してください。
波形 (調整可能な幅と 180°の位相ずれのある 2つのパルス ) は、図 42 に示した 2 つの Q トランジスタのゲートを駆動するために使用されます。T は波形の期間、Q1 と Q2 に各 1 つ、2 つのパルスがあります。これは、2 つのパルスのオーバーラップを避けるために、デューティ サイクルが 0.5 未満の必要があることを意味します。あるパルスの立ち下がりエッジから次のパルスの立ち上がりエッジまでに少しのマージンが必要です。この時間間隔を TR と呼びます。
図 41: プッシュプル コンバータ トポロジ
図 42: Q1 と Q2 MOSFET ゲートを駆動する信号
CO
D1
LO
VOUT
NS
D2
NS
VA
RO
NP
NP
VP1
VP2
Q2Q1
VDCVDC
VL
VS2
VS1
TR
Signal
Signal
T1ON
T2ON
TR
T
Driving Q1
Driving Q2
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 47

AN1207
Q1 オン、Q2 オフ
この構成の回路は、図 43 に示しましたようになります。
図 43: プッシュプル コンバータ : Q1 オン、Q2 オフ
入力回路動作
入力電圧 VDC によって、1 次側巻線では、点のない側の端が点側の端よりも正極になります。
式 158 は、1 次側の電圧を表しています。
式 158:
この同じ電圧は、下の 1 次側巻線 (NP1 = NP2 の場合 )に存在し、Q2 スイッチの総電圧は、式 159 と等しくなります。
式 159:
式 160 は、磁化電流を表しています。
式 160:
出力回路動作
1 次側の電圧の極性によって、2 次側の点側の端の電圧は、点のない端よりも負極になります。そして、ダイオード D2 は逆バイアスになり、D1 は順方向バイアスになります。
式 161 は 2 次側の電圧を表しています。
式 161:
式 162 は、インダクタの電圧を表しています。
式 162:
式 163 は、電流を表しています。
式 163:
CO
LO
VOUT
VA
RO
VDCVDC
Q1 Q2
D1
D2
VL
NS
NS
NP
NP
VP1
VP2 VS2
VS1
VP VDC VQ1 on,–( )–=
VQ2 off, 2VDC VQ1 on,–=
IM t( )V– DC VQ on,+
LM-----------------------------------t=
VSNSNP-------– VDC VQ1 on,–( )=
VLNSNP------- VDC VQ1 on,–( ) VD1 on, VOUT 0>––=
IL t( ) IL 0( )
NSNP------- VDC VQ1 on,–( ) VD1 on, VOUT––
LO---------------------------------------------------------------------------------------t+=
DS01207A_JP - ページ 48 © 2009 Microchip Technology Inc.

AN1207
Q1 オフ、Q2 オン
この構成の回路は、図 44 に表しましたようになります。
図 44: プッシュプル コンバータ : Q1 オフ、Q2 オン
入力回路動作
この例においては、1 次側巻線での電圧は、点側の端がない側の端よりも正極になります。
式 164 は、1 次巻線電圧を表しています。
式 164:
式 165 は、磁化電流を表しています。
式 165:
出力回路動作
1 次側と同様に、2 次巻線での電圧は、点側の端が、点のない側よりも正極になります。結果として、D1はオープンで、D2 は順方向バイアスです。
式 166 は、2 次側の電圧を表しています。
式 166:
式 167 は、インダクタ電圧を表しています。
式 167:
式 168 は、電流を表しています。
式 168:
CO
LO
VOUT
VB
RO
VDCVDC
Q2Q1
VL
D2
D1
NS
NS
NP
NP
VP1
VP2 VS2
VS1
VP VDC VQ2 on,–=
IM t( )VDC VQ on,–
LM------------------------------- t=
VSNSNP------- VDC VQ2 on,–( )=
VLNSNP------- VDC VQ2 on,–( ) VD2 on, VOUT 0>––=
IL t( ) IL 0( )
NSNP------- VDC VQ2 on,–( ) VD2 on, VOUT––
LO-----------------------------------------------------------------------------------------t+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 49

AN1207
Q1 オフ、Q2 オフ (PERIOD TR)この構成回路は、図45に表しましたようになります。図 45: プッシュプル コンバータ : Q1 オフ、Q2 オフ
入力回路動作
式 169 は、それぞれのスイッチの電圧を表しています。
式 169:
出力回路動作
両方のスイッチがオフのとき、インダクタには、以前と同じ方向に電流が流れるので、2 つの 2 次側巻線の電圧は VS2 = -VS1 で、 D1 と D2 順方向バイアスで導通しています。これらの電流は等しく分割され、それぞれにインダクタに流れる電流の半分が流れます。2 つの 2 次側巻線電流の電流波形は、図 47(G と H) のように図示されます。
式 170 は、インダクタ電圧を表しています。
式 170:
式 170 に基づくと、インダクタ LO に流れる電流は、式 171 と等しくなります。
式 171:
回路設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
安定状態において、TON 期間のインダクタ電流の増加は、TR 期間の減少と等しくなる必要があります。式 168 と式 171 ( ダイオードの順方向電圧降下を無視 ) を使用すると、(TON + TR) = T/2 であるため、結果は、式 172 になります。
式 172:
結果として、PWM 周期には 2 つのパルスがあり、大の理論上のデューティ サイクルは、Dmax = 0.5
です。
式 173 に表した入力/出力の関係を用いると、フィードバック制御ループは、入力電圧 VDC の変化に対して出力電圧 VOUT を一定に保ちます。そして、VDC が減少すると、TON が増加して補填します。
式 173:
したがって、システム回路設計では、 大のデューティ サイクル (DMAX)、 少入力電圧 (VDC, min) 相当に定義できます。そして、 大値よりも小さい場合には、理論的に式 174 と等しくなります。
式 174:
CO
LO
VOUT
VA
RO
VDCVDC
Q2Q1
VL
D2
D1
NS
NS
NP
NP
VP1
VP2 VS2
VS1
VQ VDC=
VL V– OUT VD on, VS1+–=
VS1 は IL を巻線の抵抗で掛けたものです
( ほぼゼロ )。
IL t( ) IL t( )VOUT– VD on,–
LO---------------------------------------t+=
where
VOUT 2NSNP------- VDC VQ1 on,–( )D=
DTON
T----------=
VOUT 2NSNP------- VDC VQ1 on,–( )
TONT
----------=
DmaxNPVOUT
2NSVDC min,-------------------------------=
DS01207A_JP - ページ 50 © 2009 Microchip Technology Inc.

AN1207
トランス : 1 次側、巻線数
『AN1114』(「はじめに」を参照 ) の「プッシュプルコンバータ」の章で説明されているように、コアのトランスは、ヒステリシス ループの第 1 と第 3 四分儀間の点で移動します。
許容可能な 大の ∆Bが定義されると (PWM 周波数とコアと巻き枠の幾何学的な寸法を基準に )、式 158と式 175 に表したファラデーの方程式を使用し、1 次側巻線数の結果は、式 176 に表したようになります。
式 175:
式 176:
トランス : 1 次側、ワイヤ サイズ
1 次側巻線に流れ、スイッチに流れ込む電流は、図46 (G と H) のように図示されます。
計算を簡素化するため、実際の電流の波形は、傾斜の中間値 (IP, mr) で置き換えられ、入力 (PI) と出力(PO) の電力を考慮して決定されます。
入力の電力を式 177 に表しています。
式 177:
出力の電力を式 178 に表しています。
式 178:
これら 2 つの方程式を解くと結果は、式 179 となります。
式 179:
rms 値は、式 180 に表したようになります。
式 180:
B∆VPTON
NPAcore--------------------=
NPVDC min, VQ on,–( )AcoreFPWM B∆
----------------------------------------------Dmax=
D はデューティ サイクルです。
PI VD C min,( )IP mr, 2Dmax=
η は効率です。
PO ηPI=
IP mr,PO
2ηVDC min, Dmax-----------------------------------------=
IP rms, IP mr, Dmax=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 51

AN1207
図 46: プッシュプル コンバータ波形 : 1 次側
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
Q1 Command
Q2 Command
VP1
VP2
VQ1
VQ2
IQ1
IQ2
2VDC
t
t
t
t
t
t
t
t
(A) = Q1 MOSFET ゲートの命令信号
(B) = Q2 MOSFET ゲートの命令信号
(C) = 1 次側巻線 NP ( 上位半分 ) の電圧 VP1(D) = 1 次側巻線 NP ( 下位半分 ) の電圧 VP2
(E) = Q1 MOSFET の電圧
(F) = Q2 MOSFET の電圧
(G) = Q1 MOSFET に流れる電流
(H) = Q2 MOSFET に流れる電流
VDC
IP, mr
IP, mr
DS01207A_JP - ページ 52 © 2009 Microchip Technology Inc.

AN1207
トランス : 2 次側、巻線数
1 次側の巻線数が定義されると、NS は、式 173 と式176 を使用して求められ、式 181 に表したようになります。
式 181:
トランス : 2 次側、ワイヤ サイズ
既に示したように、2 次側の電流波形は非常に複雑です ( 図 47 (G と H) を参照 )。しかし、計算を簡潔にするため、TON 期間にのみ電流の寄与を考慮します。IO, av, nom で表される平均電流は、コンバータを設計した平均出力電流です。 rms 2次電流 (IS)の結果は、式 182 のとおりです。
式 182:
ダイオード
TON 期間 (Q1 オン、Q2 オフ )、ダイオード D2 は逆バイアスです。許容できる 大電圧は、式 183 と等しくなります。
式 183:
D1 に流れる平均電流は、インダクタに流れる電流と等しく、その値は IO, av, nom です。
別の TON 期間 (Q1 オフ、Q2 オン ) では逆になり、D1 は逆バイアスで、D2 は導通しています。以前と同じ値が印加されます。
MOSFETS
式 159 ( 式 184 で繰り返し ) では、スイッチが許容できる電圧 ( 大の入力電圧を考慮し ) は、 大入力電圧の 2 倍です。
式 184:
スイッチが許容する必要がある 大電圧は、スイッチ制御信号の立ち下がりエッジで生じる漏れインダクタ電流によって生成されるスパイクも考慮に入れる必要があります。スパイクは、通常スイッチの電圧の 30% 高い電圧と概算されます。したがって、TON の時間間隔の終わりで、 大電圧は式 185と等しくなります。
式 185:
スイッチに流れる 大電流は、既に式 179 で計算されました。
大の VQ, max と IP, mr が得られたため、 良のデバイスを選択するために必要なほぼすべての要素がそろいました。残るは、スイッチにおける電力損失の解析の追加、つまりスイッチングと直流損失です。
NSVOUT
2AcoreFPWM B∆--------------------------------------- 108⋅=
IS rms, IO av nom,, Dmax=
VR D2, 2NSNP-------– VDC max, VQ1 on,–( ) VD1+=
VQ2 off, 2VDC max, VQ1 on,–=
VQ max, 2.6VDC max,≈
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 53

AN1207
図 47: プッシュプル コンバータ波形 : 2 次側
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
Q1 Command
Q2 Command
ID1
ID2
VL
IL
t
t
t
t
t
t
t
t
IO, av, nom
IO, av, nom/2
IO, av, nom/2
(A) = Q1 MOSFET ゲートの命令信号
(B) = Q2 MOSFET ゲートの命令信号
(C) = ダイオード D1 に流れる電流
(D) = ダイオード D2 に流れる電流
IS
IS
(upper)
(lower)
(E) = インダクタ LO の電圧
(F) = インダクタ LO の電流
(G) = 2 次側巻線 ( 上位半分 ) に流れる電流
(H) = 2 次側巻線 ( 下位半分 ) に流れる電流
DS01207A_JP - ページ 54 © 2009 Microchip Technology Inc.

AN1207
スイッチング損失
図 48 は、スイッチングにおけるスイッチの電圧と電流を図示したものです。スイッチがオンになると、電圧は急激に低下します。インダクタで電流は急速に変化できないので、電流はスムーズな増加直線となります。図 48 で見られるように、電力損失はゼロです。
スイッチがオフのときは、まったく異なります。電圧と電流の両方がスムーズな傾き ( 前半は上昇の傾き、後半は減少の傾き ) を持ち、大きなオーバーラップといくつかのゼロではない電力損失があります。
図 48: プッシュプル コンバータ : スイッチ、電流と電圧
値は、式 186 を使用して簡単に計算できます。
式 186:
直流損失は、式 187 で表したように計算できます。
式 187:
スイッチの総電力損失は、式188と等しくなります。
式 188:
2VDC
IP, mr
I
TSW TSW
V
TSW は、立ち上がり、立ち下がり時間と等しくなります。
PQ ac max,, IP mr,2VDC max, TSW
2T----------------------------------- 2VDC max,+
IP mr, TSW2T
----------------------- 2IP mr, VDC max,TSW
T----------==
PQ dc max, , IP mr, VQ on, Dmax=
PQ total max,, PQ ac, PQ dc, 2IP mr, VDC max,TSW
T---------- IP mr, VQ on, Dmax+=+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 55

AN1207
出力インダクタ
インダクタは、出力インダクタ電流が非連続とならないように選択されます。計算は、連続と非連続の動作間の端で実行されます。これは、出力電流がTON 期間の初めにゼロから開始して、TR 期間の後でゼロに戻ることを意味しています。言い換えると、電流リップル DL でもあるインダクタのピーク電流は、式 189 に表したように出力平均電流の 2 倍になります。
式 189:
式 189 を解くと、式 190 になります。
式 190:
出力キャパシタ
降圧コンバータの回路設計と同様に、出力電圧リップルは、主に ESR によるものであるため、式 191 の結果となります。
式 191:
前のトポロジでも示したように、出力キャパシタ値は、式 192 に表した関係から決定できます。
式 192:IO ripple, 2IO av min,,
NSNP------- VD C min,( ) VOUT–( )
LO---------------------------------------------------------TON= =
LO
NSNP-------VDC min, VOUT–
2FPWMIO av min,,------------------------------------------------Dmax=
VOUT ripple, ESR IO ripple,⋅=
COIO ripple, Dmax
FPWM VOUT ripple, IO ripple, ESR–( )----------------------------------------------------------------------------------------=
DS01207A_JP - ページ 56 © 2009 Microchip Technology Inc.

AN1207
フルブリッジ コンバータ
高い電力レベルをマネージする能力を持つフルブリッジ コンバータは、ハーフブリッジ コンバータに対していくつかの追加部品が必要です。
トポロジ方程式
基本的なフルブリッジ コンバータのトポロジを図49 に表しています。トランジスタ Q1 と Q4、Q2 とQ3 は常に共に動作し、図 50 に示した波形で駆動されます。この際、Q1、Q2 または Q3、Q4 が同時にオンとならないよう注意する必要があります。オンになると、低いインピーダンスの経路が VDC からグランドに対して生成されます。これは、後の章で議論するように、TON 間隔で 大値を強制します。
図 49: フルブリッジ コンバータ トポロジ
図 50: フルブリッジ コンバータ波形
CI
Q1
Q2
Q3
Q4
D1
D2
D3
D4
NP NS
NS
D5
D6
LO
COVDCVP
VS1
VS2
VQ1
VQ2 VQ4
VQ3
VOUT
VD6
VD5
TON
TON
TOFF
TOFF
t
t
TT
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 57

AN1207
Q2 オン、Q3 オン ; Q1 オフ、Q4 オフ (INTERVAL 0-TON)
図 51 に表したように、電流は Q3、1 次側のトランス、そして Q2 を通って入力に戻ります。トランスの点側の端は、点のない端よりも正極になります。
図 51: フルブリッジ トポロジ : Q2 と Q3 オン
入力回路動作
1 次側の電圧を式 193 に表しています。
式 193:
式 194 に表した法則によると、磁化電流は増加します。
式 194:
出力回路動作
1 次側巻線と同様に、2 つの 2 次巻線において点のある端は、2 つの点のない端よりも正極になります。これは、D5 は導通で D6 は導通ではないことを意味します。
2 次電圧は、式 195 に表したように計算できます。
式 195:
式196は、インダクタに流れる電流を表しています。
式 196:
出力インダクタLOの電圧を式197に表しています。
式 197:
CI
Q1
Q2
Q3
Q4
D1
D2
D3
D4
NP NS
NS
D5
D6
LO
COVDC VP
VS1
VS2
VQ1
VQ2 VQ4
VQ3
VOUT
VD6
VD5
VP VDC VQ2 on, VQ3 on, VDC 2VQ on,–=––=
iM t( )VPLP------t
VDC 2VQ on,–
LP----------------------------------t= =
VS1NSNP-------VP
NSNP------- VDC 2VQ on,–( )= =
iL t( ) iL 0( )
NSNP-------VDC VO–
LO-------------------------------t+=
VL VS1 VD5 on, VONSNP------- VDC 2VQ on,–( ) VD5 on, VO
NSNP-------VDC VO 0>–≈––=––=
DS01207A_JP - ページ 58 © 2009 Microchip Technology Inc.

AN1207
Q1 オン、Q4 オン ; Q2 オフ、Q3 オフ (INTERVAL 0-TON)
図 52 に表したように、電流は Q1、トランス、Q4を通って入力に戻ります。トランスの点側の端は、点のない端よりも負極になります。
図 52: フルブリッジ コンバータ トポロジ : Q1 と Q4 オン
入力回路動作
1 次側の電圧を式 198 に表しています。
式 198:
磁化電流を式 199 に表しています。
式 199:
出力回路動作
この例では、1 次側と同様に、点側の端が点のない側の端よりも負極になり、その結果は式 200 のとおりです。
式 200:
出力インダクタ電圧は、式 201 に表されています。
式 201:
それを流れる電流は、式 202 に表されています。
式 202:
CI
Q1
Q2
Q3
Q4
D1
D2
D3
D4
NP NS
NS
D5
D6
LO
COVDC VP
VS1
VS2
VQ1
VQ2 VQ4
VQ3
VOUT
VD5
VD6
VP V– DC VQ1 on, VQ4 on, V– DC 2VQ on,+=+ +=
iM t( )VPLP------t
V– DC 2VQ on,+
LP--------------------------------------t= =
VS2NSNP-------VP
NSNP-------– VDC 2VQ on,–( )= =
VLNSNP------- VDC 2VQ on,–( ) V– D6 on, VO–=
iL t( ) iL 0( )
NSNP-------VDC VO–
LO-------------------------------t+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 59

AN1207
Q2 と Q3 はスイッチオフされたところ、Q1 と Q4 はオフ
スイッチがオープンのとき、磁化電流は流れ続け、全電圧を反転させます。1 次側において、点側の端は、点のない端よりも負極になります。D4、トランス、D1 を流れる磁化電流は、図 53 で表されます。
1 次側の電圧はゼロになり、2 次側の電圧は、式 203に示したようになります。
式 203:
結果として、D5、D6 の両ダイオードはオンになり、インダクタ電流は2つのダイオード経路の間で半分に分割されます ( 図 53 と図 54 を参照 )。
インダクタ電流は、式 204 で表されています。
式 204:
VS2 は非常に低いので、その大きさは、インダクタ電流の半分が流れ込むことによる2次巻線抵抗の電圧降下によって与えられます。
Q2 と Q3 はスイッチオフしたところ、Q1 と Q4 はオフ
動作は前の条件と同様です。1 次側の電流の経路を図 54 に表しています。
図 53: フルブリッジ トポロジ : Q2 と Q3 はスイッチオフされたところ、Q1 と Q4 はオフ (1 次側電流経路 )
図 54: フルブリッジ トポロジ : Q1 と Q4 はスイッチオフされたところ、Q2 と Q3 はオフ (1 次側電流経路 )
VS1 V– S2=
VL V– S2 VO– VD6 on, VO VD6 on,––≈–=
CI
Q1
Q2
Q3
Q4
D1
D2
D3
D4
NP NS
NS
D5
D6
LO
COVDC VP
VS1
VS2
VQ1
VQ2 VQ4
VQ3
VOUT
VD6
VD5
CI
Q1
Q2
Q3
Q4
D1
D2
D3
D4
NP NS
NS
D5
D6
LO
CoVDC VP
VS1
VS2
VQ1
VQ2 VQ4
VQ3
VOUTVD6
VD5
DS01207A_JP - ページ 60 © 2009 Microchip Technology Inc.

AN1207
回路設計と部品の選定
入力、出力の関係とデューティ サイクル
1 次電圧と TON の積は、電圧と TOFF の積と等しい必要があります。
式 197 と式 204 を計算すると、式 205 になります。
式 205:
左側の 2 つのスイッチが、同時にオンにならないことを保証するために、式 206 で表したように、TONは T の 大比率なるよう制限されます。
式 206:
大デューティ サイクルは、式 207 に表されています。
式 207:
トランス巻線数率
TONの 大期間は、入力電圧が 少になったときに、大になります。式 205 と式 206 を使用すると、式
207 になります。
式 208:
1 次巻線数は、式 209 に表したように、コア フラックス変化 (∆B)、巻き線の両端の電圧 (VP) と物理的な実態 (Ae) に関連した式で計算されます。
式 209:
トランス : 1 次側、ワイヤ サイズ
設計仕様 POUT は既知であるため、式 210 に表したように電力はコンバータの効率、η を考慮して計算できます。
式 210:
式 210 を解くと、式 211 になります。
式 211:
いくつかの概算と実際の電流波形 ( 階段状傾き ) をIIN, av と等しい固定値で置き換えると、結果は式212 のようになります。
式 212:
VONSNP------- VDC 2VQ on,–( ) V– D5 on,
D=
D = TON/T と TON + TOFF = T の関係が使用されます
( 図 50 を参照 )。
TON max, δT=
ここで δ = 0.8 です。
DMAXTON max,
T---------------------=
NSNP-------
VO VD5 on,+( )TON max,
T---------------------
VDC min, 2VQ on,–( )TON max,
T---------------------
-----------------------------------------------------------------------=
NPVP max, TON max,
∆BAe---------------------------------------
VDC min, DMAX∆BFPWMAe
------------------------------------≈=
POUT ηPIN ηVDC min, IIN av, δ= =
IIN, av は平均入力電流 ( 図 55 (E,G,I,K)) を参照 )、δ = 0.8 です。
II N av,( )POUT
ηVDC min, δ----------------------------=
IIN av rms,, IIN av, DMAX=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 61

AN1207
図 55: フルブリッジ コンバータ トポロジ : 入力回路
t
t
t
t
t
t
t
t
t
t
t
Q2 and Q3Command
Q1 and Q4Command
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
(I)
(J)
(K)
T
T
VP
VDC - VQ2, on
VQ1
IQ1
VDC - VQ3, on
VQ4
IQ4
VDC - VQ1, on
VQ2
IIN, AV
IQ2
VDC - VQ4, on
VQ3
IIN, av
IQ3
TON TOFF
TON TOFF
(A) = Q2 と Q3 スイッチの命令信号
(B) = Q1 と Q4 スイッチの命令信号
(C) = 1 次側電圧
(D) = MOSFET Q1 の電圧
(E) = MOSFET Q1 に流れる電流
(F) = MOSFET Q4 の電圧
(G) = MOSFET Q4 に流れる電流
(H) = MOSFET Q2 の電圧
(I) = MOSFET Q2 に流れる電流
(J) = MOSFET Q3 の電圧
(K) = MOSFET Q3 に流れる電流
DS01207A_JP - ページ 62 © 2009 Microchip Technology Inc.

AN1207
トランス : 2 次側、巻線数、ワイヤ サイズ
2 次側の巻線数は、式 208 と式 209 から計算できます ( 図 56 (D、E) も参照 )。2 次側の rms 電流値の計算を簡略化するため、TOFF期間における電流値に対する寄与は考慮しません( これは、相対的に短い間隔と電流の小さな値によるものです )。電流の傾き期間の中間値を平均値と考えます ( 図 56 (D、E) を参照 )。前出の概算を使用すると、式 213 になります。
式 213:
スイッチ
TON 期間の Q1 と Q4 の 大電圧降下は、式 214 になります。
式 214:
同様に、Q2 と Q3 の 大電圧降下は、式 215 になります。
式 215:
式 216 は、Q2 と Q3 のより通常の期間における 大電圧降下になります。
式 216:
ダイオード
式 217 は、Q2 と Q3 がオンのときのダイオード D6の 大電圧降下を表しています。
同様に、式 218 は、Q1 と Q4 がオンのときの、ダイオード D5 の 大電圧降下を表しています。
式 217:
式 218:
IO av rms,, IO nom, DMAX=
and
VQ1 off max,, VDC max, VQ2 on,–=
VQ4 off max,, VDC max, VQ3 on,–=
and
VQ2 off max,, VDC max, VQ1 on,–=
VQ3 off max,, VDC max, VQ4 on,–=
VQ off max,, VDC max, VQ on,–=
VD6 off max,, V– S1 VS2 VD5 on, 2–NSNP------- VDC max, 2VQ on,–( ) VD5 on,+≈+–=
VD5 off max,, VS1 VS2 VD6 on, 2–NSNP------- VDC max, 2VQ on,–( ) VD6 on,+≈–+=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 63

AN1207
図 56: フルブリッジ コンバータ トポロジ : 出力回路
t
t
t
t
t
t
t
Q2 and Q3Command
Q1 and Q4Command
(A)
(B)
(C)
(D)
(E)
(F)
(G)
T
T
TOFFTON
TON TOFF
VS1
ID5
ID6
VL
IO, av
IL
(A) = Q2 と Q3 スイッチの命令信号
(B) = Q1 と Q4 スイッチの命令信号
(C) = 2 次側電圧
(D) = ダイオード D5 の電流
(E) = ダイオード D6 の電流
(F) = インダクタの電圧
(G) = 出力インダクタの電圧
DS01207A_JP - ページ 64 © 2009 Microchip Technology Inc.

AN1207
出力インダクタ
少インダクタは、式 219 に表したように、非連続モードの端でシステムを考えることで計算できます。
式 219:
式 219 を解くと、式 220 になります。
式 220:
出力キャパシタ
出力キャパシタは、出力リップルが指定された値となるよう選択されます。電圧リップルに対する
大の寄与は、キャパシタの ESR に起因するもので、それを流れるインダクタ電流が電圧降下を決定します。
キャパシタ値自体は、式 221 を使用して求められ、それは、すべての部品に対して考慮される電圧リップルの値について表しています。
式 221:
ESL は通常非常に小さな値であるため、これを無視すると式 222 になります。
式 222:
IO av,IO peak,
2-----------------
∆IO2
---------VO
2LO----------TOFF≈= =
LOVO 1 DMAX–( )
2IO av nom,, FPWM------------------------------------------=
VRIPPLE IRIPPLE ESRDMAX
FPWMCO-----------------------
ESL FPWM⋅DMAX
------------------------------+ +⎝ ⎠⎛ ⎞=
COIO ripple, DMAX
FPWM VO ripple, IO ripple, ESR–( )---------------------------------------------------------------------------------=
where,
IO ripple,VO 1 DMAX–( )
LOFPWM------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 65

AN1207
フライバック コンバータ
『AN1114』(「はじめに」を参照 ) で説明されているように、 フライバック コンバータは、分離変換が必要な低電力範囲 (5W ~ 150W) アプリケーションで幅広く使用されています。このコンバータには出力部にインダクタがないので、非常に簡単に高出力電圧を得ることができます。
トポロジ方程式 - 非連続モード
フライバック コンバータは、連続モードと非連続モードのどちらでも簡単に使用できます。非連続モードの場合、TOFF 期間の終了前に出力巻線電流はゼロになるので、すべての蓄えられたエネルギーが負荷に転送されます。連続モードの場合は、オンとオフの期間の終わりにトランスにいくらかの残存エネルギーが蓄えられます。
これらの両モードが解析され、非連続モードで開始されます。
図 57 は、基本的なフライバック回路を表しています。スイッチは、図 58 に示したような信号で駆動されます。
図 57: フライバック コンバータの基本的なトポロジ
図 58: スイッチ Q1 命令信号
VDC
Q1VQ1
VP VS
NP NS
D1
VD1
CO VOUT
TON TOFF
T
DS01207A_JP - ページ 66 © 2009 Microchip Technology Inc.

AN1207
Q1 オン (INTERVAL 0 – TON)図 59 は、この回路のトポロジを表しています。
入力回路動作
式 223 は、スイッチがクローズ時の 1 次側の電圧を表しています。
式 223:
点のある側の端は、ない側の端よりも負極になります。トランスは、その巻線にエネルギーを集積するインダクタとして動作します。1 次側に流れる電流を式 224 に表します。
式 224:
ゼロから開始し、T = TON でピーク値に達する増加電流は、式 225 で表されます。
式 225:
蓄積されたエネルギーは、式 226 で簡単に計算できます。
式 226:
出力回路動作
2 次側巻線の電圧を式 227 に表しています。
式 227:
つまり、ダイオード D1 は逆バイアスで、出力回路に電流は流れません。出力電流は、出力キャパシタCO によって供給されます。
図 59: フライバックコンバータ トポロジ : INTERVAL 0 - TON
VP VDC VQ1 on,–=
IPVPLP------t
VDC VQ1 on,–
LP----------------------------------t= =
IP peak,VDC VQ1 on,–
LP----------------------------------TON=
E 12---LPIP peak,
2=
VSNSNP-------– VDC VQ1 on,–( )=
マイナス記号は、点のある側の端が、点のない側の端よりも
負極である事実によるものです。
VDC
Q1VQ1
VP VS
NP NS
D1
VD1
CO VOUT
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 67

AN1207
Q1 オフ (INTERVAL TON – (TON + TR))回路トポロジを図 60 に表しています。
入力回路動作
Q1はオープンで、1次側巻線には電流は流れません。『AN1114』(「はじめに」を参照 ) に説明されているように、巻線にエネルギーを消費する回路が必要です ( 停止ネットワーク )。しかし、ここでは解析しません。
1 次側の電圧は、式 228 のように計算できます。VSは式 230 で与えられ、マイナスの記号は、ドット変換によるものです。
式 228:
出力回路動作
『AN1114』(「はじめに」を参照 ) で説明されているように、すべての電圧は符号を反転し、2 次側では、点のある側の端が点のない側よりも正極になります。そして、ダイオードは電流を導通し始めます。Q1 がオープンになったので、1 次側に流れていた電流は流れません。そして、式 229 と等しい初期電流として右下がりの傾斜で 2 次側へ転送され、TON +TR の時間でゼロに達します。
式 229:
2 次側の電圧を式 230 に表しています。
式 230:
Q1 オフ (INTERVAL (TON +TR) - T)前述したように、TON + TR の時間で 2 次側の電流はゼロに到達します。システムを非連続モードで稼動し続けるためには、式 231 に示したように、時間(TF) を追加する必要があります。
式 231:
これは、TON 期間が入力電圧 VDC と出力負荷に依存するためです。例えば、VDC が減少する、あるいは出力電流が増加するとオン期間は長くなります。TF は減少を続けますが、システムは非連続で動作できます。
図 60: フライバック コンバータ トポロジ : INTERVAL TON - TR
VPNPNS-------– VS=
IS peak,NPNS-------IP peak,
NPNS-------
VDC VQ1 on,–
LP----------------------------------TON= =
VS VO VD1 on,+=
T TON TR TF+ +=
VDC
Q1VQ1
VP VS
NP NS
D1
VD1
CO VOUT
DS01207A_JP - ページ 68 © 2009 Microchip Technology Inc.

AN1207
回路設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
入力/出力の関係は、入力から出力への電力の流れを考慮して計算されます。
1 次側に蓄積された電力は、式 226 から、式 232 に表したように計算できます。
式 232:
入力と出力の間の関係を式 233 に表しています。
式 233:
式 232 と式 233 を組み合わせて、入力電圧の関数としての出力電圧が、式 234 で表したように求められます。
式 234:
TON 期間は入力電圧 VDC の関数ですので、 大のTON (TON, max) は、 少の入力電圧 (VDC, min) と一致します。これらの値 (VDC, min は、設計仕様値で、TON, max は、通常 TON, max + TR = 0.8T となるように設定 ) を使用して、式 234 は、式 235 に表したように変更できます。
式 235:
他の 2 つの式、1 次側ピーク電流 ( 式 225) と 2 次側ピーク電流 ( 式 229) は、VDC, min と TON, max の関係を考慮に入れて、それぞれ、式 236 と式 237 に表したように変更できます。
式 236:
式 237:
トランス巻線の巻線比
比率 (NP/NS) を決定するために、Q1 MOSFET が持続できる 大電圧を求めます。
図 57 を考慮すると、スイッチの 大電圧は、式 238と等しくなります。
式 238:
1 次側電圧 VP は、式 228 と式 230 を使用して計算すると、式 239 になります。
式 239:
十分に高い電圧定格の MOSFET が選択されると、VQ1, off はデータとして考えられ、式 239 では、(NP/NS) のみが不明の値となります。したがって、NP/NS は、式 240 と等しくなります。
式 240:
P ET---
VDC VQ1 on,–( )2TON2
2TLP----------------------------------------------------= =
POUT ηPIN=
VO VDCTONηRFPWM
2LP-----------------------=
VO VDC min, TON max,ηRFPWM
2LP-----------------------=
IP peak,VDC min, VQ1 on,–
LP--------------------------------------------TON max,=
IS speak,NPNS-------
VDC min, VQ1 on,–
LP--------------------------------------------TON max,=
VQ1 off max,, VDC max, VP–=
VQ1 off max,, VDC max,NPNS------- VO VD1 on,+( )+=
NPNS-------
VQ1 off max,, VDC max,–
VO VD1 on,+( )--------------------------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 69

AN1207
許容される最大の TON
大の TON を決定する場合、コアは絶対に飽和してはならないことを考慮します。これは、エネルギーが蓄積中の電圧時間間隔の積が、エネルギーが負荷に送られている期間における電圧時間の間隔の積と等しくなる必要があることを意味しています。簡潔に述べると、図 61 に表したように、エリア A1は、エリア A2 と等しい必要があるということです。式 241 に表したように、TON, max + TR = βT (β < 1 にて ) を考慮すると、結果は式 242 になります。
式 241:
式 242:
1 次側のトランス
トランス 1 次側インダクタンスは、式 235 を使用して簡単に計算でき、TON, max を式 242 から計算した値に置き換えて、回路設計仕様である POUT, max =VO2/RO とすると、結果は式 243 になります。
式 243:
TON max, TR βT=+
TON max,
NPNS------- VO VD1 on,+( )β
VDc min, VQ1 on,–( )NPNS-------⎝ ⎠
⎛ ⎞ VO VD1 on,+( )+ FPWM
----------------------------------------------------------------------------------------------------------------------------=
LPVDC min,
2 TON max,2 RηFPWM
2VO2
------------------------------------------------------------------VDC min,
2 TON max,2 ηFPWM
2POUT max,-------------------------------------------------------------= =
DS01207A_JP - ページ 70 © 2009 Microchip Technology Inc.

AN1207
図 61: フライバック トポロジ波形 : 非連続動作
Q1 command
TON TR TF
A2
A1
T
t
t
t
t
t
(A)
(B)
(C)
(D)
(E)
(A) = Q1 MOSFET ゲートの命令電圧
(B) = トランスの 1 次巻線の電圧
(C) = トランスの 1 次巻線に流れる電流
(D) = トランスの 2 次巻線の電圧
(E) = トランスの 2 次巻線に流れる電流
T = TON + TR
VDC - VQ1, on
VP
(NP/NS)(VO + VD1, on)
IP, peak
IP
VO + VD1, on
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 71

AN1207
トランス : 1 次側、ワイヤ サイズ
図 61 (C) で分かるように、1 次側に流れる電流は、t = TON でピークになる三角波形になっています。これに基づく、rms 値は、式 244 に表したように計算できます。
式 244:
式 244 において、IP ピークは式 225 から計算され、TON, max が式 242 から計算された結果、式 245 になります。
式 245:
トランス : 2 次側、ワイヤ サイズ
図 61 (E) から、2 次側の電流も同様に三角波形です。rms 値は、式 246 を使用して計算されます。
式 246:
出力ダイオード
出力ダイオードを流れる電流は、2 次側と等しく、式 228 で計算されるピーク値を持ちます。平均電流は、式 247 に表したように計算できます。
式 247:
ダイオードの TON 期間の 大逆電圧は、式 248 に表したように計算できます。
式 248:
出力キャパシタ
出力キャパシタは、TON 期間の負荷への全電流を供給する必要があることを考慮して計算できます。この際、電圧降下が許容できる出力電圧リップルよりも少ない必要があるという基準が用いられます。電圧降下は式 249 と等しいので、キャパシタ値は、式250 に表したように計算できます。
式 249:
式 250:
IPRIMARY rms,IP peak,
3----------------- TON max, FPWM=
IP peak,VDC min, VQ1 on,–
LP--------------------------------------------TON max,=
ISECONDARY rms,IS peak,
3---------------- TRFPWM
NPNS-------
IP peak,
3----------------- TRFPWM==
ID1 av,12---IS peak,
TRT
------=
VQ1 off max,,NSNP-------– VDC max, VQ1 on,–( ) VO–=
VDROOPIO max, TON max,
CO--------------------------------------=
COIO max, TON max,
VACCEPTABLE_RIPPLE--------------------------------------------------------=
DS01207A_JP - ページ 72 © 2009 Microchip Technology Inc.

AN1207
トポロジ方程式 – 連続モード
連続モード アプリケーションの場合、基本的な回路は非連続モードと変わりません ( 図 57 を参照 )。しかし、根本的な違いとして、電流は (1 次巻線と 2次巻線の両方で ) PWM 周期 T において、ゼロから開始せず、ゼロには到達しません。これは、PWM周期の 後に、システムにいくらかのエネルギーが蓄積されていることを意味します。
周期 T は、TON と TOFF のみから成ります。基本的なトポロジ方程式は、以前と厳密に同じであるため、以降は詳細を省略して説明します。
Q1 オン (INTERVAL 0 – TON)
入力回路動作
式 251 は、1 次巻線の電圧を表しています。
式 251:
1 次側の電流を式 252 に表しています。
式 252:
式 253 は、TON の終わりにおけるピーク電流を表しています。
式 253:
出力回路動作
2 次側の電圧を式 254 に表しています。
式 254:
Q1 オフ (INTERVAL TON – T)
入力回路動作
1 次側の電圧を式 255 に表しています。
式 255:
出力回路動作
式 256 は、トランスの 2 次巻線の電圧を表しています。
式 256:
初期電流 (1 次側から励起 ) は、式 257 に表されています。
式 257:
回路設計方程式と部品の選定
入力/出力の関係とデューティ サイクル
図 62 (B) を見ると、式 258 に表したように、トランス コアのヒステリシス カーブの初期と 終の点が一致するために領域 A1 と領域 A2 は同じ必要があります。
式 258:
TON/T の 大値は、VDC が 小値、VDC, min (NP/NSは式 260 で計算 ) のときに、式 258 から計算でき、結果は式 259 になります。
式 259:
VP VDC VQ1 on,–=
IPVDC VQ1 on,–
LP----------------------------------t=
IP peak,VDC VQ1 on,–
LP----------------------------------TON=
VSNSNP-------– VDC VQ1 on,–( )=
VPNPNS-------– VS=
VS VO VD1 on,–=
IS peak,NPNS-------IP peak,
NPNS-------
VDC VQ1 on,–
LP----------------------------------TON==
VDC VQ 1 on,( )–( )TONNPNS------- VO VD 1 on,( )+( )TOFF ⇒=
VONSNP------- VDC VQ1 on,–( ) D
1 D–-------------=
DTON
T----------=
TON max,T
---------------------
NPNS------- VO VD1 on,+( )
VDC min, VQ1 on,–( )NPNS-------+ VO VD1 on,+( )
--------------------------------------------------------------------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 73

AN1207
図 62: フライバック コンバータ トポロジ波形 : 連続動作
VP
IP
VS
IS
t (A)
t (B)
t (C)
t (D)
t (E)
Q1 command
TON TOFF
IP, peak
IS, peak
A1
A2
IP, av
VDC - VQ1, ON
(NP/NS)(VO - VD1, ON)
VO - VD1, ON
(NS/NP)(VDC - VQ1, ON)
(A) = Q1 MOSFET ゲートの命令電圧
(B) = トランスの 1 次巻線の電圧
(C) = トランスの 1 次巻線に流れる電流
(D) = トランスの 2 次巻線の電圧
(E) = トランスの 2 次巻線に流れる電流
DS01207A_JP - ページ 74 © 2009 Microchip Technology Inc.

AN1207
トランス巻線の巻線比
比率 (NP/NS) を決定するために、Q1 MOSFET が許容できる 大電圧を式260に示すように計算する必要があります。
式 260:
トランス : 1 次側、ワイヤ サイズ
要求される出力電力 PO を考慮し、式 261 に表したように、rms 値は、 実際の電流 ( 階段状の傾斜 ) をIP, av と等しい固定値に置き換えて計算できます。rms 値は、式 262 と等しくなります。
式 261:
式 262:
トランス : 2 次側、ワイヤ サイズ
出力平均電流 (IO, av) を決定する必要があります。出力電力 ( 回路設計データの 1 つ ) を考慮すると、式 263 に表したようになります。
式 263:
rms 値は、式 264 と一致します。
式 264:
トランス : 1 次側インダクタンス
非連続モードの端でシステムを考えると、 少 LPインダクタンスは簡単に計算できます。これは、IPピークが、TON 期間における 1 次側の電流増加の正確に半分であることを意味します。
したがって、 少平均入力電流は式265となります。
式 265:
LP を解くと、式 266 になります。
式 266:
出力キャパシタ
非連続モードの出力キャパシタは、式 267 に表したようになります。
式 267:
NPNS-------
VQ1 off max,, VDC max,–
VO VD1 on,+( )--------------------------------------------------------=
POUT ηPIN ηIP av, VDC VQ1 on,–( )TON max,
T--------------------- ⇒= =
IP av,POUT
η VDC VQ1 on,–( )TON
T----------
-----------------------------------------------------=
IP rms, IP av, DMAX=
IO av,POUT
VO VD1 on,+( ) 1TON max,
T---------------------–⎝ ⎠
⎛ ⎞------------------------------------------------------------------------=
IO rms, IO av, DMAX=
IP av min,,POUT
η VDC min, VQ1 on,–( )TON max,
T---------------------
--------------------------------------------------------------------------∆IP
2---------
VDC min, VQ1 on,–( )2LP
------------------------------------------------TON max,== =
LP η VDC min, VQ1 on,–( ) VDC min, VD1 on,–( ) TON max,2 FPWM=
COIO max, TO N max,( )
VACCEPTABLE_RIPPLE--------------------------------------------------------=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 75

AN1207
電圧と電流トポロジ
この章では、制御ループと電圧と電流モードを解析します。降圧コンバータを使用しますが、ここで説明する技術はいずれのトポロジでも有効です。
全トポロジにおいて、入力/出力の関係が簡単に得られることが分かりました。要求される入力と出力の電圧が分かると、後は、PWM デューティ サイクルを計算するのみで、理論的にはこれで十分です。
しかし、現実の世界では、異なる動作をします。入力電圧は変化し、負荷はばらつきます ( 例、出力負荷のオン / オフが切り替わります )。部品には許容誤差、経年変化、温度変化がるだけでなく、もちろんノイズが常に存在します。その結果、実際の性能は期待値と異なる可能性が生じます。
予想外の状況でもシステム動作を制御下に維持するには、「制御ループ」( ハードウェアあるいはファームウェア ) を追加し、出力電圧の「制御」動作を実行する必要があります。制御ループにより、回路設計で環境条件が変化した場合でも、出力電圧のばらつきを 小限に抑制できます。さらに、場合によっては、制御ループが危険な動作状況の回避に役立ちます。電流制御ループは、トランスにおけるフラックス ウォーキングを防げます。
以降の章では、各トポロジの電圧と電流動作モードについて説明します。以下の 2 つの基本的な疑問を心に留めておいてください。
1. 入力電圧が突然変化したときに、システムの出力電圧に何が起こるのか。
2. 負荷が変化したときに、出力電圧に何が起こるのか。
電圧ループ
図 63 は、既に詳細に説明した降圧コンバータにいくつかの回路を追加したものを表しています。出力に接続された一対の抵抗器 (R1 と R2) は、VOUT の振幅コピー (VFB) を減少させます。この電圧は、リファレンス電圧 (VREF:出力に要求される電圧 )と誤差振幅 (EA) で比較されます。出力信号 (VX) は、スイッチを駆動するPWM信号のデューティ サイクルの調整に使用されます。
PWM ブロックが如何に動作するかを理解するため、まず、システムのアナログ実装に通常使用される技法を用います。これは、この技法が唯一の実装方法であるという意味ではありません。後ほど、同じ機能を dsPIC® DSC デバイスを使用してどのようにデジタル実装するかを説明ます。アナログ 実装は、非常に簡単かつ直感的で、どのように動作するかを簡潔に説明できます。
PWM ブロックは、コンパレータで置き換えでき、これはローカルな発振器 (図 64を参照 )によって生成された鋸歯状信号と VX 電圧を比較します。その周波数は、PWM の周波数です。
図 63: 降圧コンバータ - 基本的な電圧ループ
VREF
VFBVXEA
R1
R2
R0CO
LO
PWM
DS01207A_JP - ページ 76 © 2009 Microchip Technology Inc.

AN1207
図 64: 降圧コンバータ - 基本的なアナログ電圧ループ
ここでは、システムが如何に動作するかを説明します。VFB 電圧は電流出力電圧を表し、リファレンス電圧 VREF から誤差振幅 EA を引いたものです。少なくとも現時点では、EA ブロックの機能は引き算の実行のみです。信号 VX は、システムが即座に生成する「実際の」電圧と要求される電圧との誤差を表します。安定状態における VX 信号は、非常に低速に変化する平均値を持ちます。コンパレータでは、この信号はローカルに生成された鋸歯信号と図65 に示したように比較され、VST < VX のとき VCTRL= 1 となり、VST > VX のときは VCTRL = 0 の結果となります。
図 65: 誤差電圧 (VX) と鋸歯波形を比較して生成される制御電圧 (VCTRL)
VCTRLは、スイッチを駆動するために使用するPWM信号で、VX 値を基準にしているので、デューティサイクルは大きいか小さいかのどちらかです。
EA での動作は、出力電圧が増加する場合には PWMデューティ サイクルは減少するようにVX電圧が減少し、その逆の場合も同様です。VCTRL の立ち下がりエッジは、VST に対する VX の位置によって移動します。
VREF
VFBVXEA
R1
R2
R0CO
LO
SawtoothOscillatorVST
VCTRL -
+
注 : VX = VREF – VFB
VST
VOUT decrease
VX
VOUT increase
VCTRL
注 : VX = VREF – VFB
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 77

AN1207
ライン調整
入力電圧が変化したときに、このシステムはどのように反応するでしょうか。これに答えるために、終的な目的が、入力の如何なる変化に対しても可能な限り出力を維持することであると考えます。
さらに、これまでに説明してきた降圧コンバータの動作について表す基本的な方程式も考慮に入れる必要があります。
式 268 は、TON 期間のインダクタの電流を表しています。TOFF 期間の電流は、式 269 と等しくなります。
式 268:
式 269:
安定状態においては、t = 0 での電流は、t = T での電流値と等しくなります。連続動作モードのイベントの場合が、図 66 に表されています。出力の平均電流 (IO, av) ( 式 270 を参照 ) も図示されています。
式 270:
それでは入力電圧 VDC が増加すると、何が起こるでしょうか。インダクタ電流の上昇傾きは、VDC に比例するので、TON 期間に増加します。
いくらかの遅延を伴い、LC ローパス フィルタによって出力電圧が変化 ( 増加 ) し、EA によってさらにいくらかの遅延が発生して VX 信号は減少します。したがって、VCTRL のデューティ サイクルは小さくなります ( 図 65 を参照 )。これにより、TON時間が短縮し、結果として VOUT が低減します。その後、短いデューティ サイクルで、出力は再び標準値に戻ります。TON の間、IL の傾きのみが変化することに注意してください。システムが VOUT を一定に維持しているので、新しい安定状態での TOFF期間の傾きは、元々の傾きと等しくなります。
図 67 は、新しい安定状態で遷移が安定後 ( 実線 )で、VDC ( 点線 ) が変化前のインダクタ電流を表しています。初期と 終 (t = 0 と t = T) の電流値は、低くなりますが、ピーク (B 点 ) は、高くなります。出力平均電圧が変化しないので、平均電流 (IO, av) は期待値から変化しません。B点に対応する期間 (TON)は短くなっていることが分かります。
図 66: 連続モードにおけるインダクタ電流
IL on, t( )VDC VOUT–( )
LO-----------------------------------t=
IL off, t( )VOUT
LO-------------t–=
IO av, IL 0( )IL peak, IL 0( )–
2------------------------------------+=
O TON Tt
IL, peak
IO, av
IL(O) =IL(T)
IL
DS01207A_JP - ページ 78 © 2009 Microchip Technology Inc.

AN1207
図 67: 電圧モード制御 - ライン調整
IO, av
BA
TONTON T
Initial
Final
t
IL
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 79

AN1207
負荷調整
負荷が変化すると何が起こるでしょうか。
例えば、RO 値が、( システムの遅延により ) 非常に初期の段階で低下した場合、出力電流は変化しません。このことは、出力電圧が非常にわずかだけ減少することを意味します。結果として、再び図 64 と図 65 を参照すると、VX 信号は高くなり、デューティ サイクルは増加します。システムの動作は、図68 を使用して解析できます。これは、負荷の変化前 ( 点線 ) と変化後 ( 実線 ) のインダクタ電流を表しています。今回は、ループ自身によって入力電圧が変化せず、出力電圧も一定に維持されるので、TON と TOFF 期間における両方の傾きは同じ状態を維持します。
初期において、VX が増加するため、デューティ サイクルも増加し、オリジナルの A 点から B 点に移動します。これは、PWM 周期の終わり (M 点、t =T の電流 ) における電流が初期の電流 (H 点、t = 0 の電流 ) よりも少しだけ大きくなることを意味します。各 PWM 周期では、電流のステップが式 271 に表したようにゼロよりも大きくなるという影響があります。
式 271:
遷移終了時、ループは、出力電圧 VOUT を標準の値に戻すように制御します。結果として、デューティサイクルは、その初期値に戻ります ( 入力電圧 VDCに変化はありません )。図 68 で、新しい安定状態において、B 点が C 点に移動することを意味しています。負荷 RO が低下することにより、出力平均電流は、IO, av, initial から IO, av, final に増加します。
図 68: 電圧モード制御 - 負荷調整
IL∆ t( ) IL T( ) IL 0( )–=
C
A
TON Tt
H
IO, av, finalIO, av, initial
M∆IL(T)
B
DS01207A_JP - ページ 80 © 2009 Microchip Technology Inc.

AN1207
電圧モードの利点と不利な点
これまでの説明から明確に分かるように、電圧モード制御の実装は非常に簡単です。ラインと負荷調整のメカニズムもまた非常に理解し易いものです。これが、このアプローチの主な利点の 1 つです。さらに、通常大きな振幅の信号が処理されることも良いノイズ マージンが保たれるため、利点となります。
一方、主な不利な点は、動作条件のいずれの変化に対する反応としても常に遅延が付加されてしまうことです。VDC は出力電圧に影響するので、この変化のみ検出されます。したがって、検出はオリジナルイベント (VDC の変化 ) からローパス フィルタの一連の遅延分待機する必要があります。 さらに、一度出力における変化が検出されると、EA によって遅延が追加されます。これらの遅延すべてを考慮に入れる必要があり、そのようにしないと、機能しないシステムが構築されてしまいます。
負荷の変化は直ちに検出されますが、スイッチ タイミングが有効になる前に、EA によって再び遅延が追加されます。
電流モード
電流モードは、電圧モードの不利な点を解決するために導入されました。特にシステムの反応時間の短縮を目的とし、インダクタ/トランスの巻線に流れる電流の制御する必要がある場合にもいくつかの利点があります。
電流モードが有効に使用される典型的なアプリケーション例は、PFC です。これは、交流 (AC) 電圧源から流れる電流を強制的に正弦曲線にする役目を果たす回路です。この場合、電流モード制御は、直接対象となる変数 ( 電流 ) に働き掛けます。
図 69 のように、電流モードの実装では実際には 2つのループがあり、1 つは出力電圧の外部制御 ( 前章で説明済み ) そして、もう 1 つは、( 内部で ) インダクタ電流を制御するものです。電流モードの基本的な考えは、電力変換に対してより直接的に影響を与える量をモニタすることです。さらに、電流を制御することで、より高速の反応時間が可能になります。
図 69 を参照すると、EA は以前と同様に出力電圧をモニタしまます。その出力は、インダクタに流れるピーク電流と前ステージからのリファレンス信号を比較する2番目のアンプに対するリファレンス信号として使用されます。
スイッチ Q がクローズの場合、インダクタの電流は、右上がりの傾きを持つ波形 ( 図 70) となることを思い出してください。PWM 周期の初め (t0) で、PWM 出力はアクティブに設定され、インダクタ電流は、電流が VX の値に達するまで増加を続けます。それらが一致するとき (t0 + TON)、PWM 信号はリセットされ、次の PWM 周期が開始するまでローを保持します。このシステムは、ピーク時のインダクタ電流を制御下に維持します。しかし、後述するように、これが唯一のアプローチではありません。
図 69: 電流モード制御ループ
PWM
Imeas
VXVFB
VREF
CA
Q
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 81

AN1207
図 70: インダクタ電流
降圧コンバータについて重要な点はは、インダクタ電流が出力電流であるということです。つまり、その制御には、関連する量 (VOUT) の直接制御がかかわってきます。他のシステムで示したように、例えば、PFC では、インダクタ電流は入力電流で、正弦曲線の形の必要があります。
この構成の場合、電圧モード制御に使用される外部で生成された鋸歯信号は、インダクタ電流信号で置き換えられ、そのピーク電流は制御 ( 制限 ) されています。
システムはかなり簡潔ですが、いくつかの弱点があります。
• ピーク電流ではなく、平均出力電流が制御できることが望ましい ( 出力電圧は平均電流に比例し、ピーク電流に比例するわけではないため )。
• 安定性にいくつかの問題がある。
ライン調整
安定状態において、入力電圧が変化すると何が起こるのでしょうか。また、システムはどのように反応するのでしょうか。
この動作は、図 71 ( 点線はオリジナルの安定状態 )を見ることで、理解できます。例えば、VDC が増加するとすぐにインダクタ電流の傾きが変化し (式268を参照 )、この場合は増加します。出力はまだ変化していません。これは、出力の LOCO フィルタの遅延によるものです。結果として、VFB は変化せず、VX は以前と同じです。ピーク インダクタ電流は、ループに以前と同じ値に強制されています。これは、右上がりの電流信号が、安定状態の A 点と比較して B 点で以前の VX 信号に交差することを意味します ( インダクタ電流の過渡動作を L点から B点の線で表しています )。デューティ サイクルは、入力電圧が増加に伴い、必要分減少する必要があります。 終的に、新しい安定状態の条件は C 点で VX線上 ( ピーク電流は常に同じ ) にあり、より急な上昇傾きと、同じ下降傾きを持ちます。重要なことは、入力電圧の変化に対する反応が、ループに沿って伝播されるのを待つ必要がなく、即時であることです。つまり、システムが非常に速く反応します。
図 71: ピーク電流モード制御 - ライン調整
t0 t0 + TON T
VX
C
TON 初期 Tt
H
IO, av, initialIO, av, final
MLK
AB VXO
TON 最終
TON 過渡
DS01207A_JP - ページ 82 © 2009 Microchip Technology Inc.

AN1207
問題点
図 71 で示したように、入力電圧調整が良好に動作している間 (VDC の増加が、デューティ サイクルを減少させる )、式 272 で表される割戻しがあります。これは、出力電圧 VOUT が平均インダクタ電圧に比例する間、ピーク電圧は一定に保たれることによるものです。
式 272:
しかし、図 71 に見られるように、インダクタ電流の初期値と 終値 (H 点と K 点 ) が以前 (L 点と M点 ) よりも低くなります。これは、式 273 に表したように、 終の平均インダクタ ( 出力 ) 電流が低くなることを意味します。
式 273:
低電流によって、出力電圧が低くなり、それは外部電圧ループによって検出されます。代わりに、平均( とピーク ) 電流を増加させようとしますが、内部ループは、ピーク電流を一定に保持しようとします。発振効果が生じ、しばらく継続します。
ピーク電流モードにおける問題は、システムがデューティ サイクルが 0.5 より大きい場合に、図 72と図 73 に表すように不安定となることです。
図 72: ピークモード電流制御 - D > 0.5
図 73: 電流モード制御 - 傾き補整
VOUT av, ROIO av,=
IO av final,, IO av initial,,<
∆IF > ∆II
∆IF
D > 0.5
∆II
減少傾き減少傾き
インダクタ電流
VX
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 83

AN1207
図 72 に示したように、安定状態で D < 0.5 のとき、何らかの理由によってインダクタ電流に揺れ (不安 )があると、PWM 周期の終わりで揺れの振幅が減少します (∆IF < ∆II)。したがって、多くの PWM サイクルの後、システムは初期状態に戻ります。反対に、デューティ サイクルが 0.5 より大きいと ( 図 73)、同じ電流の揺れが期間の終わりでより大きく、限界なく増大して、発振動作を発生させます (∆IF > ∆II)。両方の問題は、詳細な解析をそれほど必要とせずに、VX 固定ピーク電流限界を各期間の初めにおける VXと等しい降下傾き信号と置き換えることで簡単に修正できます。そして、それは TOFF 期間の電流傾斜の半分と比例する降下傾きを持ちます ( 図 73)。負荷補整
出力負荷が変化すると何が起こるでしょうか。
例えば出力負荷が減少した場合、出力電圧は瞬間的に減少し、VX 信号はそれを補整するために高くなります ( 図 74 を参照 )。上昇傾きの信号はより長く続き、オリジナルの A 点の代わりに、B 点で VX と交差します。そして、デューティ サイクルはそれに対応して増加します。これにより、インダクタ電流のレベルが、 初の値と比較して PWM 周期の終わりで高くなります ( 図74 では、∆IF を明確にするために誇張して表しています )。平均電流が新しい均衡値まで増加する間、この不均衡は継続します。ここでは、デューティ サイクルは初期値に戻り (入力電圧VDCは変化しません )、システムは新しい安定状態に入ります。
図 74: ピーク電流モード制御 - 負荷補整
O 過渡の TON
安定状態の TON
T
B
A
∆IF
VX during transient
VX at steady state
DS01207A_JP - ページ 84 © 2009 Microchip Technology Inc.

AN1207
その他の電流モードの技術
いくつかの具体例と共に説明してきた電流モード以外にも、使用可能なモードがあります。 もわかりやすい技術は、ループが平均 ( ピークではなく )出力電流を一定に維持する方法です。出力電圧は平均出力電流に比例するため、これは良い技術と言えます。
アナログの場合、電流ループ誤差増幅に対して何らかのローパス フィルタを追加する必要があるので、回路は少し複雑になります。逆に、デジタルの観点は、サンプリングのトリガがデューティ サイクルの半分なら、電流の平均値を A/D コンバータによって直接サンプルし、変換できるので非常に簡単です。dsPIC DSC 内部の特別なレジスタが、正確にデジタルの観点で変換動作を開始できるようにします ( 図 75 を参照 )。
2 つ目の可能性として、ヒステレテック制御と呼ばれる実装方法があります。この技術では、電流値は2 つの値、固定値か dsPIC DSC デバイスそのものでダイナミックに計算される値のいずれかの間を変化できます。この場合、内部コンパレータとそれらのしきい値は、D/A コンバータによって設定され、CPUからの干渉なしにシステムを実装できます (図76 を参照 )。図 76 に示すように、減少しているインダクタ電流がしきい値 1 に到達するとすぐに、dsPIC DSC デバイスで電流制限イベントが実行されます。そして、それに関連し、ピンを強制的にハイにします。結果として、電流は増加を開始します。2 番目のしきい値に到達するとすぐに、初期イベントが実行され、出力ピンがリセットされて電流が減少するよう動作します。生成された PWM 周波数は一定ではありませんが、ラインと負荷の関数として変化します( 上昇の傾きは VIN に比例し、下降の傾きは VOUT に比例することを思い出してください )。
図 75: PWM 周辺モジュールにより生成される A/D コンバータのトリガ
図 76: dsPIC DSC デバイスでのヒステリテック制御の実装
PWM
Inductor
Signal
Current
t
=SEVTCMP Register PWM Time BaseCounter16 16
Trigger to ADC to start conversion
PWMxH
PWMxL
CL SetOutput
FaultReset
PWMIPP
DAC1
DAC2
CPU
dsPIC
TH2
TH1
Inductor Current
TH1
TH2
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 85

AN1207
内部コンパレータは、「一定オン」時間あるいは、「一定オフ」時間の実装にも使用できます ( 図 77 と図 78 を参照 )。これらは、増加するインダクタ電流、しきい値のプリセット (D/A コンバータ出力 )、
PWM 周期を制御する PWM タイマのリセット間で一致します。2 つの制御モードは基本的に同じです。唯一の違いは、考慮される PWM 出力が直接か、反転かということです。
図 77: 「一定オン」時間波形
図 78: 「一定オフ」時間波形
i
外部リセット
指定期間
TON TON
PWM 時間基準カウンタ
i
外部リセット
指定期間
TOFF TOFF
PWM 時間基準カウンタ
DS01207A_JP - ページ 86 © 2009 Microchip Technology Inc.

AN1207
制御理論
これまで、フィードバック ループは出力 VOUT がリファレンス値と比較されるところであり、誤差信号は電力変換器の特定機能 ( 例えば、デューティ サイクル ) の変更に使用されるとしてきました。これは、クローズ ループ システムで、制御理論ツールで解析する必要があります。
ここでの問題は、電圧か電流ループのいずれかが使用されると、システムが不安定になる可能性があることです。図 63 と図 69 のような一般的な回路においては、EA や CA を除くすべてのブロックの動作が既知か計算されています。そして、システムが確実に安定するには、EA ( と CA) の伝達機能を選択することが回路設計上の課題となります。
制御理論の観点から、降圧コンバータ回路の解析前に、いくつかの基本的な関連を規定する必要があります。
フィードバック ループ
図 79 は、G(s) と H(s) が 2 つのブロックの伝達機能である一般的な制御ループを表しています ( インパルス応答のラプラス変換 )。x(t) はシステムへの入力信号で y(t) は出力で、y(t) は H(s) を通って入力へフィードバックします。誤差信号 e(t) を形成するために、出力 r(t) が入力 x(t) から引かれます。
図 79: 制御ループ
式 274 に示された計算により、入力/出力の関係が導かれ、それはクローズ ループ ゲイン (GCL(s)) と呼ばれます。
式 274:
GCL(s) は、式 275 を使用して簡潔にできます。
式 275:
式 276 は、2 つの期間 G(s) と H(s) の期間を表していて、オープン ループ ゲイン (GOL(s)) と呼ばれます。
式 276:
図 80 は、G(s)、 H(s)、GOL(s) と GCL(s) を説明しています。このグラフは長いスケールですので、乗算は加算と一致し、除算は減算と一致します。
図 80: 制御ループ関数
このグラフを理解するための数学的関係が式277に表されています。
式 277:
結論として、H(s) = const、オープン ループ ゲインは、単純に G(s) のグラフを正確に |1/Hs)| と同じ量だけ y 軸の方に移動させて得ることができます。
ここで問題は、式 274 で説明されているシステムが安定しているか否かをどのようにして判断するかということ、そして、システムを安定させるための条件は何かということです。
両方の疑問に対する回答はおおよその解析から得られます。
制御理論の重要な点は、図 79 にあるようなクローズ システムが安定しているか(とその程度 )は、オープン ループ ゲイン (GOL(s)) の動作を見ることで判断できるいうことです。
式 274 では、分母がゼロにならないようにします。ゼロになると、GCL は式 278 に表したように無限に大きくなります。
式 278:
+ G(s)
H(s)
y(t)x(t)r(t)
e(t)+-
GCL s( ) G s( )1 G s( )H s( )+---------------------------------=
GCL s( )1
H s( )----------- if G s( ) >>1
G s( ) if G s( ) <<1⎩⎪⎨⎪⎧
=
GOL s( ) G s( )H s( )=
|G(s)|
|GOL(s)|
|1/H(s)|
f
|GCL(s)|fCO
GOL s( ) G s( )H s( ) ⇒=
GOL s( ) dB G s( ) dB H s( ) dB G s( ) dB1
H s( )-----------
dB–=+=
1 G s( )H s( ) 0≠+
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 87

AN1207
式 278 の結果は、式 279 になります。式 279:
図 80 を参照すると、|GOL(s)| = |G(s)H(s)| = 1 の点はfCO ( クロスオーバ周波数 ) です。この周波数の位相は、180° とは異なります。安全面から、およそ 130°- 140° の位相か、あるいは位相マージン = (180° - fCOでの位相 ) ≥ 45° でなければなりません。
簡略すると、安定性の基準は、次のように表すことができます。
• fCO における GOL(s) の傾きは、-20 dB/decade であること
• fCO における位相マージンは、少なくとも 45° であること
これらは、安定性に対する十分条件でしかありませんが、簡潔であることから非常に広く使用されています。
2 つ目の基準の意味は、これまでの説明から明確です。 初の基準については、次のように説明できます。
GOL(s) 伝達機能を見ると、多項式の比率であるとわかります。いくつかの努力 ( この時点では、それがどれだけ困難であるかは問題ではない ) により、GOL(s) の分子と分母は、式 280 に表したように、初の順番期間の積に形となります ( 結局は複雑な数字です )。
式 280:
分子の各期間はゼロで、分母の期間は極です。電源ユニットで生じるような通常の状態では、それぞれのゼロは、オープン ループ ゲインの +π/2 位相の助力を与え、一方それぞれの極は、–π/2 位相の助力を与えます。ループ ゲインの観点から、それぞれのゼロにより、ゲインの傾きそれ自身が +20 dB/decade変化することがあり、一方、極によって-20 dB/decadeの傾き変化が生じます。つまり、先に述べた GOL(s)傾き基準は、交差周波数 (fCO) の付近であると解釈できます。ループ ゲインに対する助力の合計は、単極システムで提供されるものと類似しています。
電力コンバータと制御理論
これで、安定性の意味とシステムが安定かどうかを判断する基準の概要がお分かりになったことと思います。電圧モード制御ループを持つ降圧コンバータ ( 図 63) を見直してみましょう。コンバータの機能を汎用制御理論ブロック図に一致させ、伝達機能を決定することは必須です。
したがって、図 63 は、図 81 のように表すことがができ、入力から出力への転送機能 G(s) は、次の 3 つのブロックで構成されています。
• GEA(s) は、誤差増幅転送機能
• GM(s) は、PWM 生成器の転送機能
• GLP(s) は、出力ローパス フィルタ転送機能
出力から入力への転送機能 H(s) は、存在しないか、H(s) = 1としてください。
図 81: 降圧コンバータ電圧モードループ
The phase of G s( )H s( ) must be 180°where G s( )H s( ) 1=≠
GOL s( )
s zk–( )
k 1=
N
∏
s pl–( )
l 1=
M
∏
----------------------------=
GLP(s)GM(s)GEA(s)
VREF
DS01207A_JP - ページ 88 © 2009 Microchip Technology Inc.

AN1207
GM(s) 伝達機能は、おそらく直感的にすぐに理解できるものではありませんが、次のように考えてください。入力信号が小さな振幅を持つ正弦波形のリップルを含む直流値である場合、出力は PWM信号で、デューティ サイクル値は同じ正弦規則に従って安定状態値のあたりとなります。単純化すると簡単に言い換えると、入力/出力の関係は、出力のデューティ サイクル レンジと入力正弦振幅との比率で、周波数は維持されます。入出力の関係を数学的に決定するいくつかの手法があります。詳細にには説明しませんが、重要なのは、トポロジと電力システムが決定すると、GM(s) が計算できるということです。GLP(s) はさらに簡単で、分析的に計算できます。出力キャパシタ ESR も考慮されている図 82 のローパス フィルタを考えます。
図 82: 降圧コンバータ出力ステージ
ここでは、GM(s) と GLP(s) は既知です。前出の定義に従ってシステムを安定させる関数 GEA(s) を見つけることが、回路設計のここでの課題となります。アナログの回路設計の場合、これは、オペアンプが使用される標準の補償ネットワークにおけるいくつかの受動部品の計算に変換されます。そのような回路の一例が図 83 で、その伝達関数が図 84 にあります。
図 83: 誤差増幅ネットワーク
図 84: 誤差増幅伝達関数
前出の式を参照すると、GOL(s) = G(s)H(s) = GEA(s)GM(s)GLP(s) で H(s) = 1です。
dB で換算すると、結果は式 281 になります。
式 281:
|GOL(s)| が分からない場合、好ましいゲインの条件は次になります。
• 周波数が低くなるとき、ゲインを高くします。これは、低い周波数における非常に高いゲインは、安定状態の誤差を小さくするからです。
• 周波数が高くなるとき、小さなゲインは、高周波数ノイズの影響を軽減します。
• 周波数間では、一定のゲインが 良です。
既知で好ましい |GOL(s)| 値がわかり、式 282 の結果になります。
式 282:
アナログの実装においては、グラフィカルな解決策が簡単に見つかります。少しシステマテックでないアプローチとしては、図 83 と図 84 の回路において、十分な解決策が見つかるまで、異なるキャパシタ値をテストするという方法があります。
VIL
VOUT
ESR
R0
CO
VIN
VOUT
R1
R2
C2
GEA(s)
C1
f
fz fp
|GEA(s)|
GOL s( ) dB GEA s( ) dB GM s( ) dB GLP s( ) dB+ +=
unknown
unknown
known
known
GEA s( ) dB GOL s( ) dB GM s( ) dB GLP s( ) dB––=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 89

AN1207
デジタル解決法
これまでは、アナログ解決法 ( アナログで電圧と電流モードを如何に実装するか ) についてのみ考察してきました。これは、初心者にとっては、アナログ領域における基本的なコンセプトをまず理解した後、それらをデジタルの世界に変換する方が簡単だからです。逆に、コンバータの回路設計に豊富な経験を持つ設計者は、アナログ回路設計に経験を持ち、本書の説明内容は、デジタルのアプローチを構築する基礎となります。
もちろん、デジタル解決法においては、受動電力部品が使用されます。変更されるところは、PWM の生成方法とフィードバック ループがどのように実装されるかということです。
以下は、マイクロチップのスイッチモード電源(SMPS) デバイスの概略で、スイッチモード電源の実装に使用できるアーキテクチャと機能の理解について説明しています。
スイッチモード電源 (SMPS) dsPIC DSCデバイス
マイクロチップの dsPIC SMPS DSC デバイスは、特にデジタル スイッチング システムの実装向けに作成されたものです。これらのデバイスは 16 ビットのプロセッサで、定評のあるdsPIC30Fデバイスファミリをベースに構築されていて、3 つの主な構成ブロックがあります。
• 16-bit MCU• デジタル シグナル プロセッサ コア
• インテリジェント電力周辺モジュール (IPP)IPP は、PWM 生成器、高速 10 ビットアナログ - デジタル変換 (A/D コンバータ )、高速コンパレータの3 つの周辺モジュールのスーパーセットです。
他の多くのプロセッサと比較して新しいものはないように思われるかもしれませんが、逆に多くの新しい特長があります。主なポイントは、
• 周辺モジュールの高性能さ
• CPU の直接の干渉なしに PWM の出力波形の生成と制御に協力する上記の 3 つの周辺モジュール間の高度な連動性
PWM 信号 ( 大 4 つまでの出力 ) は、同一周波数か、 低 1.05 ns までのデューティ サイクル解像度でそれぞれが独立して動作できます。
• 標準エッジ揃えの PWM• 補完 PWM• プッシュプル PWM• 複数位相 PWM• 可変位相 PWM• 固定オフ時間 PWM• 電流リセット PWM• 電流制限 PWM• 独立時間基準 PWM
PWM は、A/D コンバータ動作を開始するトリガセットの生成、故障信号による PWM 動作の停止が可能で、さらに、内部コンパレータでしきい値が定義された電流より大きな電流で PWM出力を禁止できるだけでなく、外部信号によって PWM 周期カウンタをリセットし、固定のオフ/オン出力が実装できます。
高速 10-bit A/D コンバータは、同時に 大 5 個までの信号をサンプルでき、常に 2 つ ( 通常 1 つは電流で、1 つは電圧 ) の入力チャンネルを同時に変換できます。変換動作は次の複数のトリガで開始できます。
• 独立したソフトウェア トリガ
• グローバルソフトウェア トリガ
• PWM スペシャル イベント トリガ
• PWM 生成器トリガ
• タイマ 1 またはタイマ 2 周期一致
• PWM 生成器電流制限 A/D コンバータ トリガ
• PWM 生成器故障 A/D コンバータ トリガ
コンパレータは、オーバー電流の検出と、いくつかの電流モード ループにおいて、インダクタ電流がプリセット値に到達したときの検出に使用されます。
IPP が PWM、A/D コンバータ、コンパレータ信号の生成と制御の多くを担う間に、CPU と DSP エンジンは、デジタル解決法における制御ループをクローズするため要求される計算の実行に十分な時間を費やすことができます。
16-bit x 16-bit 高速積算器と 40-bit 累算器は、高集積の制御アルゴリズムの非常に効率のよい実装を可能にします。デジタル ループの実装に要求される動作は、基本的には積算/累算命令の連続です。DSP コアは、そのような命令を非常に効率良い方法で実装できる性能があります。MAC命令は、以下の動作を 1 命令サイクル ( 現在のデバイスでは 33 ns、次世代のデバイスでは 25 ns) で実行できます。
1. 2 つの値の乗算
2. 前に加算した値と現在の乗算の結果を累積する
3. 次の MAC 動作のために、レジスタに保存される 2 つのファクタを新しい値で更新する
4. 後で使用する値をポイントできるようにポインタをインクリメントする
メモリを効率良く使用することで、処理ユニットの全体のスピードを低下させることなく、RAM ( とFlash) に対する高速アクセスの実装が可能となります。特に、mac動作を実行するときの主な問題の 1つは、積/和演算の計算部分が動作しているときに、次の演算の準備に RAM から 2 つの新しいデータをフェッチする必要があることです。これは、1命令サイクル中に 2 回の RAM のリード アクセスが可能である必要があるということです。これには、複数の解決策があります。マイクロチップのアプローチは、RAM を 2 つの部分 (X-RAM と Y-RAM)に分割し (macクラス命令専用に )、それぞれにアドレス バスとデータ バス、そしてアドレス生成ハー
DS01207A_JP - ページ 90 © 2009 Microchip Technology Inc.

AN1207
ドウェアを複製する方法です。つまり、2 つの新しいファクタが同時にフェッチ可能な2つの経路が使用できます。制御ループの実装を完成するには、初期状態の設定とそして通常は、その結果が仕様範囲内であることを確認するための追加作業が必要です。しかし、全制御ループの計算は、通常 1 ~ 2 マイクロ秒で実行されます。
PID
電圧と電流モード制御ループの両方において、システムを安定させるために誤差増幅 (GEA(s))の伝達関数を設計することがアナログ解決法での目的でした。デジタル解決法においても、これは同様です。
非常に一般的に使用される構成ブロックは、PID(proportional: 比例、integrative: 積分、derivative: 微分 )です。これは、アナログ領域で通常使用されるもので、デジタル領域においても、非常に簡単で役立つアプリケーションであることが分かります。
その名前からも想像がつくように、PID は 3 つの基本的なブロックから成り立ち、それらの出力は、次のとおりです。
• 入力に比例
• 入力の積分
• 入力の微分
これらのブロックを連結する方法は多数ありますが、図 85 に表した 3 つのブロックを並列接続する、
も頻繁に従来から使用されている手法について考察します。
図 85 は、システムを表しているブロック図に PIDをどのように挿入するかも示しています。PID ブロックの目的は、出力 [y(t)] がリファレンス信号[x(t)] と一致するよう、手動でそれが直接つながっているシステム (「PLANT」) を駆動する出力 u(t) を生成することです。PID への入力は、リファレンス信号 ( 理想的、あるいは要求される PLANT の動作 )と実際の出力動作との誤差です。明らかに、目標は、誤差の結果が限りなくゼロに近くなるような動作させることです。
図 81 と図 85 を比較すると、GEA が PID 制御器で変換し、同時に PLANT は、GM(s)、GLP(s) の積になることが分かります。
以降では、アナログ領域における PID から説明し、それを同等のデジタル PID に変換します。
図 85 の連続時間領域における動作を表した方程式を式 283 に示しています。
式 283:
その伝達関数 (インパルス応答のラプラス変換 )を、式 284 に表しています。
式 284:
図 85: PID による一般的なシステム制御
u t( ) KPe t( ) KI+= e t( )dt KDde t( )
dt------------+
U s( ) KPKIs
----- KDsKDs2 KPs KI+ +
s-----------------------------------------=+ +=
++
ProportionalKP
IntegrativeKI
DerivativeKD
Up(t)
Ui(t)
Ud(t)
PLANTx(t) y(t)U(t)
e(t)
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 91

AN1207
図 86 に表したように、2 つのゼロと 1 つの極が開始点にあります。低周波数における高いゲインは、直流誤差の軽減に好ましいもので、逆に高周波数における高ゲインは避けるべきです ( ノイズと見せかけの信号が大きくなります )。これが多くの場合、伝達関数が2番目の極を追加するようわずか変化する理由です (fp2、点線の伝達関数 )。次のステップは、アナログ PID とその方程式を離散時間のバージョンに変換させることです。そのために、式 285 を使用して s 領域から z 領域へのマッピングを実行する必要があります。式 285:
Z 領域はサンプルされた信号を解析し、システムを合成するために も役立つ領域です。これは、ラプラス変換の離散システムの一方になります。Z 変換と呼ばれる変換を通じて時間領域から z 領域へ、そ
してその逆に移動するのは簡単です。Z 変換の も注目に値する機能の 1 つは、s における有理伝達関数を z -1 でにおける有理伝達関数に変換することです。これは、式 280 に示したようなアナログ伝達関数から、デジタル領域で、式 286 のような伝達関数を得ることを意味します。
式 286:
式 285 のように、s 領域から z 領域にマップする、いくつかの変数変換があります。それぞれの変換は、2 つの領域が互いにどのようにマップされるかに異なる特長を持ちます。ただし、その詳細は、このアプリケーション ノートの目的を超えます。
図 86: アナログ PID 伝達関数
ここで T はサンプル周期です。
s 1 z 1––T
----------------→
H z( )
A 1 cr z 1––( )
r 1=
N
∏
1 dkz 1––( )
k 1=
M
∏
----------------------------------------=
fZ1 fZ2 fP2
Pole at the origin
-20db/sec
U(s)
+20db/sec
f
DS01207A_JP - ページ 92 © 2009 Microchip Technology Inc.

AN1207
ブロック図は、変換によって図 87 に示したようになります。図 87: デジタル PID によって制御された汎用システム
式 287 を使用すると、z 領域の伝達関数が簡単に求められます。
式 287:
結果は、式 288 に表したようになります。
式 288:
時間領域に戻ると ( 逆 Z 変換を行う )、式 289 になります。
式 289:
++
Proportionalkp
Integrative
Derivative
PLANT
VREF
+
kdT----- 1 z 1–
–( )
kiT
1 z 1––
----------------
Ud(z)
E(z)
Ui(z)
Up(z)
U(Z)
UP z( ) kpE z( )=
Ui z( )kiT
1 z 1––
----------------E z( )=
Ud z( )kdT----- 1 z 1–
–( )E z( ) ⇒=
U z( ) kpkiT
1 z 1––
----------------kdT----- 1 z 1–
–( )+ + E z( )=
KA kP kiTkdT----- KB; kp 2
kdT-----+⎝ ⎠
⎛ ⎞– KCkdT-----=;=+ +=
U z( ) 1 z 1––( ) KA KBz 1– KCz 2–
+ +[ ]E z( )=
U z( )kpT kiT
2 kd+ +( ) kpT 2kd+( )z 1– kd z 2–+–
T 1 z 1––( )
--------------------------------------------------------------------------------------------------------E z( ) ⇒=
where
U z( ) 1 z 1––( ) KA KB z 1– KC z 2–
+ +[ ]E z( )=
u n( ) u n 1–( ) KAe n( ) KBe n 1–( ) KCe n 2–( ) ⇒+ ++=
u n( ) u n 1–( ) kp ki kd+ +( )e n( ) kp 2kd+( )– e n 1–( ) kde n 2–( )++ +=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 93

AN1207
この式は、出力 [u(n)] ( この場合 PWM のデューティサイクル ) の電流値は、前の時間 [u(n - 1)] の瞬間における出力の値、電流誤差 x 係数 (KA)、前のステップからの誤差 x 別の係数 (KB)、2 ステップ前の誤差x 3 つ目の係数 (KC) のすべてを加算して求められるということを表しています。これは、dsPIC DSC デバイスの計算に要求される離散時間領域の方程式です。この動作は、PWM 周期Tの期間に一度のみ 大値で実行されることに注意してください。
式 289 の期間は式 290 のように変換ができます。
式 290:
式 290 に関連する注意事項
• 比例寄与は電流誤差と前の誤差の差に依存する
• 積分寄与は電流誤差に依存する
• 微分寄与は、式 291 の形で表される誤差の増分に依存する
1. すべてての誤差が 「0」のとき、u(n) = u(n - 1)2. 固定値の誤差があるとき、
a) 比例寄与は「0」b) 積分部分は、ノンゼロ寄与で表現される
c) 微分部分は、ゼロ寄与で表現される
3. 電流誤差が前の誤差と非常に近くなったときに、KP だけが存在する場合 (KI と KD = 0) 、u(n) はこれ以上変化しません。つまり、残存誤差がこの条件において受け取られます。この残存誤差は、A/D コンバータとその計算に使用される解像度にも依存します。
4. KI だけが存在すると、e(n) がであっても、常に寄与が存在します。この場合も、全残存誤差はA/D コンバータと計算解像度に依存します。
式 291:
式 292を用い、3個の係数の 2つが無効 (KB = KC = 0)とすると、結果は式 293 になり、実際に、寄与は 3つすべての構成ブロックに起因することを意味します。
式 292:
式 293:
u n( ) =
u n 1–( )+ +
kp e n( ) e n 1–( )–[ ]+ +
ki e n( )[ ]+ +
kd e n( ) 2e n 1–( ) e n 2–( )+–[ ]+
e n( ) 2e n 1–( ) e n 2–( )+–[ ] e n( ) e n 1–( )–[ ] e n 1–( ) e n 2–( )–[ ] en 1 n,– en 2 n 1–,–∆–∆=–=
u n( ) u n 1–( ) KAe n( ) KBe n 1–( ) KCe n 2–( )+ + +=
u n( ) u n 1–( ) KPe n( ) KIe n( ) KDe n( )+ + +=
DS01207A_JP - ページ 94 © 2009 Microchip Technology Inc.

AN1207
PID の動作
式 284 と式 288 から分かるように、KP、KI と KD の値を変更するることで、PID システムの周波数応答の動作が変化します。係数と伝達関数間の関連を理解することは簡単ではありません。
z 領域の式 287 を参照してください。
• KP ≠ 0で、KI = KD = 0ならば、伝達関数は固定値 kp です。
• KI ≠ 0で、KP = KD = 0ならば、伝達関数は原点がゼロで、極が z = 1です。
• KD ≠ 0で、 KP = KI = 0ならば、伝達関数は z = 1で 1 つのゼロがあり、1 つの極は原点です。
比例期間単独で誤差をかなり軽減できますが、それを無効にはできません。これは ( 式 290 を参照 )、誤差が ( その絶対値とは関係なく ) ほぼ一定で、ゼロではないとき、PID の計算からの出力は固定値となるためです。つまり、比例期間は誤差を軽減しますが、 後には、ゼロでない残存の誤差が常に結果として存在し、比例ファクタのみでは完全に除去できないことを意味します。
これを解決するため、システムのメモリを表す積分期間が比例残存誤差をゼロに減すことができます。ただし、積分期間は、システムに発振をもたらす可能性があるので、注意して使用する必要があります。ゼロでない値を継続して蓄積することは、システムの片側に飽和をもたらし、そして反対側に対しても同様の影響を与えます。
微分要素は、その寄与が電流と前の誤差の差に比例するので、誤差値の急峻な変化にシステムが反応するようにします。
これまで、3 つの係数 KP、KI、KD の値については何も述べてきませんでした。これらの値は、基本的に 2 つの方法で決定できます。
1. 実証的なアプローチは、KP ≠ 0で、 KI = KD = 0で開始し、KP の値を小さな残存誤差が受け取られるまで調整して、KI を 終誤差がほぼゼロに到達するま増加させます。そして 後に、入力誤差におけるステップの変化に対してシステムの性能を向上させるために kd 期間を増加させます。
表 4 は、係数とシステムの動作の関係の基礎を理解するために使用できます。しかし、類似していないシステムの動作は異なりますので、この表は単に基本的な関係を表すものに過ぎないことに注意してください。
表 4: 係数とシステム動作との関係
2. 2 番目のアプローチは、さらにシステム的で、ジーグラー/ニコル法 (Ziegler/Nichols) として知られています。この方法では、比例ゲイン( 他の係数はゼロ ) を、システムが安定点 ( ステップの変更は、リファレンス値に対して適応する ) の端になるまで増加させることから開始します。
この状態では出力は周期 T で発振し、対応する係数は KP です。
その他の係数は、一般的な「制御論」の教科書にある表から得ることができます。
全PID式が実装されることはあまりないことに注意してください。たいていの場合、比例 - 積分部分 (PI)のみが実装され、これはシステムと必要なシステム応答に依存します。
クローズ ループ反応
立ち上がり時間
オーバーシュート
安定になるまでの時間
安定状態での誤差
KP 減少 増加 微妙に
変化
減少
KI 減少 増加 増加 除去
KD 微妙に
変化
減少 減少 微妙に
変化
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 95

AN1207
dsPIC DSC デバイスによるデジタル制御ループ
PID は、DC/DC コンバータ制御ループにどのように適応するでしょうか。「デジタル期間」で再考し図63 を描き直すと図 87 になり、動作の順序は、SMPS部品の周辺モジュール ( ハードウェア ) と、計算( ファームウェア ) に分けられます。
フィードバック電圧は、オンボードの A/D コンバータで変換されます。dsPIC DSC デバイスでは、10-bit の値が返されます。実際には、コンバータは常に 2 つの信号を変換していることが知られています。これは、電流と電圧が同時に利用できるようにするためです。この実装では、電流測定は使用されず、代わりに基本的な電圧制御ループが実装されています。
図 88: dsPIC DSC デバイスによる降圧コンバータ電圧モード制御ループの実装
R1
R2
R0C0
LO
VOUT
VDC
dsPIC
A/DDSP Engine
MACOperation
Duty CycleRegister
PWM IPP
16 10+
16VREF
PID CoefficientsBuffer
Error SamplesBuffer
KA
KB
KC
e(n)
e(n - 1)
e(n - 2)
40-bit Accumulator
Boundary Tests
PID Computation
X
X
X
16
16
1616
16
16
32 32 32
16
16
16
(discarded)
(Duty Cycle)
DS01207A_JP - ページ 96 © 2009 Microchip Technology Inc.

AN1207
A/Dコンバータからの電圧はリファレンス信号から減算され、結果の誤差は、PID を実装するためにDSP エンジンに与えられます。DSP エンジンは、式 289 を正確に実装します。DSPエンジンの 40-bit アキュムレータは、以前の結果の値を蓄積するために使用され、その値 u(n) は、式294 となります。
式 294:
PID 出力 (u(n)) は、電流デューティ サイクル値で、IPP PWM デューティ サイクル レジスタに書き込まれています。
これが、基本的なデジタル ループを実装するために必要なほぼすべてのことです。実際には、フィードバック電圧がリファレンス電圧から非常にかけ離れている場合には、デューティ サイクルに対する非常に大きな寄与が蓄積されるなど、いくつかの事実に注意する必要があります。これによって、デューティ サイクルが飽和効果を伴い大きくなりすぎる可能性があります。PID はこの状況から復帰できますが、応答時間に非常に大きな影響を及ぼすので、この状況はできる限り回避してください。より適切な方法は、デューティ サイクル値を PWM周期でクランプすることです ( これは、図 87 の「境界テスト」の意味です )。制御ループのデジタルの実装には、考慮しなくてはならない次のような遅延があります。
• アナログ - デジタル サンプル / 変換時間
• PID 計算時間
• 電力部品応答におけるいくらかのノンゼロ遅延
• ローパス フィルタ遅延
これらの遅延すべては、今回サンプリング周波数の境界条件を導くために合計されます。この時間を反転するようにシステムを高速にサンプリングすることは意味がありません。言い換えると、これはシステムにおいける任意の変化が、ループに沿って伝播するために要求される時間です。
この遅延時間の逆数は、システムで正当に使用できる 大のサンプリング周波数を決定します。元の信号を再生できるナイキストのサンプリング定理は、対象となる信号の 大周波数の 低でも2倍のサンプリング周波数である必要があることを思い出してください。この値 2 は、実は理論上の値であって、実際にはさらに高い値の必要があります。標準的な値は、6 ~ 10 です。同時に正常に動作する大の信号周波数は、サンプリング周波数の 1/6 から1/10 となります。
概念を明確にするには、図 89 (A) をご覧ください。ここで、fs はサンプリング周波数、fm は 大の信号周波数値です。
ループの遅延を 少にするには、デジタル ループの動作速度を可能な限り高速にし、使用できる 大のサンプリング周波数する方法が 適です。しかし、これはなぜでしょうか。重要となる点は、高いサンプリング周波数であれば、 大の信号周波数は高くなり、システムの環境条件の高周波数での変化に対して、ループが容易に応答できるということです。fs (fs1 < fs2) の 2 つの異なる値のグラフィカルな例が図 89 (B) にあります。サンプリング周波数と許容可能な 大信号周波数を同じ比率に維持することで、fs1 に比べて fs2 の方が大きな帯域幅となります。
概念をさらに理解するために、入力電圧 VDC にはリップルがあり、このリップルは周波数 fO の正弦波であると考えます。正弦周波数が小さい場合、システムは、この入力の正弦変化に対して補整するよう、コンバータのパラメータを容易に調整でき、安定した ( リップルのない ) 出力を与えることができます。これで、正弦波周波数は継続して増加します。システムは特定の値までそれを追従、そして補整できます。しかし、ある値 f で、システムは正弦の周期よりも長いシステム遅延の状態を正しく補整できなくなり、ループは出力電圧をまったく制御できません ( 多少簡略化された図 89 (C) を参照 )。
u n( ) u n 1–( ) KAe n( ) KBe n 1–( ) KCe n 2–( )+ + +=
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 97

AN1207
図 89: システム ループ帯域幅とサンプリング周波数
アナログとデジタル ループの主な違いの 1 つは、前者は、全時間で値と振幅が継続し、後者では、これらが非連続となることです。上記で分かるように、時間は離散的で、信号のサンプリングは、固定 ( 一定 ) の繰り返し率で取得されます。振幅は、A/D コンバータが、入力値を有限な出力可能値に割り当てるので離散的です。例えば、10-bit A/D コンバータ
では、1024 出力値のみが利用できます。一方入力値は、無限の連続範囲を持ちます。
このような離散化の効果は何でしょうか。
それら両方が信号に加えられたノイズであると考えられますが、そのような付加的なノイズの効果の解析は、このアプリケーション ノートの目的を大きく超えています。しかし、離散化に関連する重要な点としては、A/D コンバータとデジタル PWM の解像度がシステムの動作にどのように影響を与えるのかということです。
少の A/D コンバータの解像度は、式 295 に示しました要求される出力電圧の振幅と要求される出力電圧の電圧精度との比率から計算できます。
式 295:
精度 1% が要求されるときの 5V の標準出力は、式296 になります。
式 296:
デジタル PWM 周辺モジュールには、2 つの異なる解像度があります。デジタル PWM の周波数解像度は、基本周波数の生成に使用されるビット数に依存します。SMPS デバイスでは、PWM の周波数は、式297 で計算できます。
式 297:
周波数の 少の変化は、PTPER レジスタの値の 少の変化に相当します。そのレジスタの下位 3 ビットは使用できないため、 少の変化は 8 (23 = 8) で、これは 8.4 ns に相当します。表 5 は、標準周波数値に対して実際に受信できる周波数解像度を表しています。解像度は、図 90 に図示されています。
(A)
(B)
(C)
fm fs
fm1 fs2
fm fs
fm2 fs1
A B C
A、B、C は、標準デューティ サイクルに対して
挿入される正弦曲線信号を表しています。
A = システムで補整される信号
B = 部分的にだけ補整される信号
C = 全く補整されない信号
fs1fm1--------- fs2
fm2--------- fm2 fm1>⇒=
System Bandwidth
t
t
t
res log2VOUT
VOUT requested,∆-----------------------------------------=
res log25
0.05---------- 7 bits≈=
PTPER は PWM 周波数を設定するレジスタです。
FPWM14 55, 106• 64•
PTPER-----------------------------------------≈
DS01207A_JP - ページ 98 © 2009 Microchip Technology Inc.

AN1207
表 5: 周波数解像度
図 90:
周波数 最大周波数 最少周波数
100000 100085,98 99914,16150000 150193,55 149806,95200000 200344,23 199656,95250000 250538,10 249464,21300000 300775,19 299228,79350000 351055,58 348950,75400000 401379,31 398630,14450000 451746,44 448267,01500000 502157,03 497861,42550000 552611,14 547413,42600000 603108,81 596923,08650000 653650,11 646390,43700000 704235,09 695815,54
0,00
500,00
1000,00
1500,00
2000,00
2500,00
3000,00
3500,00
4000,00
4500,00
100000 150000 200000 250000 300000 350000 400000 450000 500000 550000 600000 650000 700000
Series1
∆f
Frequency
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 99

AN1207
PWM 信号の 2 番目の解像度は、デューティ サイクル解像度で、1.5 ns と非常に高い値です。計算すべきパラメータはシステムの出力解像度で、これはPWMのデューティ サイクルの 少変化に対応して出力電圧がどれだけ変化するかを表します。これは生成できる出力電圧の 少修正の測定です( 式 298 を参照 )。
式 298:
例えば、100 kHz の PWM 周波数と標準の 5V 出力電圧の結果は、式 299 になります。
式 299:
後に考慮すべき事柄は、PWM 解像度は、A/D コンバータの解像度よりも 低でも1ビット高い必要があるということです。これに反すると、出力値は2 つの A/D コンバータの値の境界を交差し、システムは安定状態に到達しようとし続け、これら 2 つの値の間で発振してしまいます。
コード例
ブロック図 ( 図 91) は、電圧モード クローズ ループの実際の実装例を表しています。このアプリケーション ノートで使用したコードは、ダウンロードできます ( 付録 A 「ソース コード」を参照 )。メイン プログラムは、次の 2 つの部分から構成されています。
1. 使用周辺モジュールすべて (IPP PWM と IPP A/D コンバータ ) がプログラムされる初期化ルーチンのセット
2. メインループ。例 ( 図 91) においては空です。これは、関連するオペレーションすべてが、A/Dコンバータの割り込みルーチンで動作するためです。
これは、計算は ( これまで説明してきたように )、システムの帯域幅をできるだけ早く増加させるように実行される必要があるからです。メイン ループは、定期的に優先順位の高いA/Dコンバータの割り込みサービスルーチン (ISR) によって割り込まれるため、優先順位の低いタスクは、このループで実行できます。例えば、ユーザー インタフェースの制御や、外部ユニットとの通信がこれに該当します。
指摘したように、A/D コンバータの割り込みは、ファームウェアの実際のコア部分になります。実行される基本的なオペレーションは以下のものです。
1. A/Dコンバータのハードウェアからデータを収集する。
2. 現在の読み出されたシステムの電圧値 (VFB) とリファレンス電圧値との差を計算する。
3. 出力がデューティ サイクルとなる PID を実装する。
4. 小値と 大値の間の計算値にクランプする。
5. デューティ サイクルを生成した ( 新しい )デューティ サイクルに更新する。
プロセッサは、その内部高速 RC (FRC) 発振器から、標準周波数 14.55 MHz で動作します。内部 PLL (32x)がコアと周辺モジュールの動作周波数を増加させます。そして、クロック速度と高性能の DSP エンジンの優れた性能により、A/D コンバータの割り込みルーチンは、1.4 µs で実行され、PID の基本的なファンクションは、1.15 µs で実行されます。
通常は、毎 PWM 期間ごとにデューティ サイクルを更新する必要はありません。既に説明したように、デューティ サイクルの更新周期は、 大のループ帯域幅によって決定され、システムは入力 ( ライン変換 ) や出力 ( 負荷変換 ) における高速な変化に対して応答できるようになります。例えば PWM の周波数が 200 KHz で、電圧 / 電流がサンプルされ、デューティ サイクルが 1 回おきに更新されると、結果は 100 KHz の更新率となります。これは、システムで 2 つの連続する相互間で 10 µs となります。
ファームウェアがA/Dコンバータのルーチンの実行に 1.4 µs を要求するとき、UART における通信やまた、あるいはヒューマンインタフェースの制御といった必要なオペレーションの実行に、まだ 8.6 µs(10 – 1.4 = 8.6) 使用できることになります。dsPICDSC デバイスは、優れた制御ループを実装するだけではなく、追加機能の実行に十分な性能を備えています。
VMIN∆ VOUT nom, 1 05ns, FPWM••=
VMIN∆ 5 1 05ns, 1003 0 5mV,=••=
DS01207A_JP - ページ 100 © 2009 Microchip Technology Inc.

AN1207
図 91: プログラム フロー
MAIN
Init Routines
Output Voltage
Endless Loop
ADC ISR
Select Pair
Read Output Voltage
Compute Error
Compute PID
Boundary Checks
RETFIE
RETFIE
Read Input VoltagePair AN2/AN3
RETFIE
Init VarsInit PortsInit I/OInit Timer1Init PWMInit ADC
Ramp-up
NOP
VIN
Output Voltage
Input VoltageDummy
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 101

AN1207
詳細なコード記述
以下の章では、基本的な PID 機能を実装するいくつかのコードを詳細に解析しています。
この回路設計では、マイクロチップの dsPICDEM™降圧開発ボード ( 部品番号 DM300023) を使用して設計およびテストを実施しています。
変数の定義
誤差値用バッファは、例 1 に示したように、X-RAMの近くに配置されています。
例 1:
他の PID の係数用バッファも同様に、例 2 に示すように Y-RAM の近くに配置されています。
例 2:
いくつかの追加サービス変数も、例 3 に示したように近くに配置されています。
例 3:
コード記述
メインのコードは、次のような初期化ルーチンで開始します。
• InitVars
バッファをクリアし、KA、KB と KC パラメータを初期化します。また、DSP エンジンが要求する動作をするようにいくつかのコアのレジスタ ビットも初期化します (DSP の乗算演算のために符号モードをイネーブル、アキュムレータ A の飽和をイネーブル、データスペース書き込み飽和をイネーブル、DSP の乗算演算のために整数モードをイネーブル )。ポインタは、2 つのバッファの先頭で初期化されます。
• InitPorts
ポートBのピンの一部はアナログとして使用されます。そのため構成レジスタは、それに一致してプログラムされる必要があります。ポートE の I/O ピンは、PWM 周辺モジュールにも使用され、出力ピンとして初期化されます。
• InitIO
以前の動作でエネルギーを蓄積している可能性のあるキャパシタを放電させるために、開始時に PWM ポートに対して固定の低い値を出力します。
• InitTimer1
タイマ 1 を初期化し、割り込みをイネーブルにします。
• InitPWM
以下の構成で 1 つの PWM チャンネルをイネーブルにします。
a) この PWM ジェネレータに対して主のタイミング基準がタイミングを与える。
b) DCx レジスタがこの PWM ジェネレータに対してデューティ サイクル情報を提供する。
c) 正のデッド時間を全出力モードに対してアクティブに適用する。
d) デッド時間期間 (0x0190)e) 毎秒のトリガイベントに対してトリガを
出力する。
f) PWM モジュールが、PWMxH と PWMxLピンを制御する。
g) 故障入力をディスエーブルする。
h) PWM の時間基準を A/D コンバータモジュール (= 8) をトリガするために比較する。
• ADC
コンバータは、クロック 13.3 MHz でイネーブルされ、IRQ が生成されて、トリガがどちらの場合にも PWM1 であるように 0 と 1 のペアが構成されます。
• StartOps
タイマとシステムの全動作を開始します。出力電圧のターゲット (VSET) がセットされ、初期の出力電圧が小さな値 (VDESIRED = 0x40) に固定される。
初期フェーズ後、初期のゼロから 終値へのスムーズな経路のために傾きが生成されます。割り込みの率が 1 µs のタイマ 1 が使用されます。割り込みごとに、要求電圧は要求される出力電圧に到達するまで固定のデルタ ( 一定の差分 ) で増加します。
そして、メインのコードは無限ループに入り、通常の動作中は、A/D コンバータの ISR によってのみ割り込まれます。
.section PidVars_Xmem, bss, near, xmemory; Pid valuesError_n: .space 2Error_n_1: .space 2Error_n_2: .space 2
.section PidVars_Ymem, bss, near, ymemory;Pid gain valuesK_A: .space 2K_B: .space 2K_C: .space 2
MyFlag: .space 2; bit flagsVdesired: .space 2Vset: .space 2Vin: .space 2Vfb: .space 2SystemTimer: .space 2Vctrl: .space 2
DS01207A_JP - ページ 102 © 2009 Microchip Technology Inc.

AN1207
A/Dコンバータ割り込みサービス ルーチン (ISR)これは、コードの実際のコア部分です。 初に、アナログ チャンネルのどちらのペアが割り込みを生成したかを決定します。計算された GOTO が対応するコード部分へのジャンプに使用されます。電圧制御ループが実装されているので、出力電圧値 ( ラベルは OutputValues ) のみが対象です。
そして、いくつかの管理維持が実行され ( バッファの開始アドレス ポインタの初期化 )、現在の入力電圧の値が読み出されて、例 4 に示したように調整されます。コードのこの部分では、W3 は、電圧値を保存している A/D コンバータのレジスタを示します。出力電圧を読み出すハードウェア回路が 1/2 に抵抗分圧しているので、左シフト (2 倍 ) する必要があります。
例 4:
誤差の現在値が決定できます ( 例 5 を参照 )。要求される電圧とA/Dコンバータを通して読み出される実際の電圧との差が誤差であることを思い出してください。コードのこの部分では、W0 は、 初は実際の出力電圧値を保存しており、 後には、新しく計算された誤差を保存します。
例 5:
PID は、まず (W6 と W7 レジスタとバッファポインタを初期化するため ) movsac 命令を使用して計算された後、図 81 に記述したように積 / 和命令を実行するため、例 6 に示したように mac 命令 を (3 回 )使用して計算されます。
例 6:
終的には、結果 ( アキュムレータ A に保存された )も丸められて RAM の領域に保存されます (VCTRL)。デューティ サイクル値は、連続するステップで蓄積されアキュムレータ A に継続して保存されます。
アキュムレータのデューティ サイクルが周期よりも大きくなっていないか、あるいは逆に小さくなりすぎていないかを確認するためのチェックがアキュムレータ A に対して実行されます。
PID 係数の解像度を上げるために 8.8 フォーマットが使用されることに注意してください。これは、16ビット幅のレジスタのビット 7とビット 8の間に暗黙のカンマがあることを意味します。この良い点は、分数も使用できるということです。つまり、このフォーマットにおける値「1」は、0000.0001.000.0000 = 0x0100を表します。
; Calculate Voltage errormov [W3], W0sl W0, #1, W0mov W0, Vfb
; computation of proportional error; ep = Vdesired - current output voltage; ep [W1] = Vdesired - Vfbmov Vdesired, W1sub W1, W0, W0
movsac A, [W8]+=2, W6, [W10]+=2, W7mac W6*W7, A, [W8]+=2, W6, [W10]+=2, W7mac W6*W7, A, [W8]+=2, W6, [W10]+=2, W7mac W6*W7, A; save value roundedsac.r , -#8, [W2]
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 103

AN1207
結論
高性能な A/D コンバータと D/D コンバータの必要性は、マイクロチップの dsPIC SMPS ファミリ デバイスのようなプロセッサの性能によってサポートされています。このデバイスは、コンピュータによる集中的なアルゴリズムを実行し、また特定の周辺モジュールも提供します。
コンバータの回路設計のあらゆる面を網羅することは、このアプリケーション ノートの範囲を超えてしまいます。ここでは、動作するコンバータの理解と回路設計に必要な非常に最低限の基本的なツールを提供することを意図してきました。
メイン コンバータのトポロジ、その要件事項、そして性能は、コンバータを実装し、最大の性能を達成する基礎となるものです。
このアプリケーション ノートの前半ではトポロジ( 分離型と非分離型 ) について説明し、様々なシステムの動作の詳細が提供されています。いくつかの例を挙げて、消費電力や効率といった適切な追加情報が記載されています。
また、設計式が全トポロジに対して提供されていて、これらが理論と実際の実装とのギャップを埋めてくれます。他の回路設計のアプローチも必要に応じて使用できます。
デジタル コンバータは、クローズ ループシステムです。これは有利な部分であると同時に問題点でもあります。このアプリケーション ノートには、基本的な制御理論の概説、そして安定したコンバータを設計する上で、この理論が提供する強力なツールをどのように活用するかについても説明しています。最後に、これらの結果をマイクロチップの dsPICSMPS ファミリデバイスを使用して、如何に効率よく実装するかについて述べられています。PID システムの実装が示され、コードも入手可能 ( 付録 A「ソース コード」を参照 )。
参考文献
• Ned Mohan, Tore M. Undeland, William P. Robbins, 『Power Electronics: Converters, Applications, and
Design』, John Wiley & Sons, Inc., 2002• Abraham I. Pressman, 『Switching Power Supply
Design』, McGraw-Hill, 1997• Lawrence R. Rabiner, Bernard Gold, 『Theory and
Application of Digital Signal Processing』, Prentice-Hall, Inc., 1975
• A. V. Oppenheim, R. W. Schafer, 『Digital Signal Processing』, Prentice-Hall, Inc., 1975
DS01207A_JP - ページ 104 © 2009 Microchip Technology Inc.

AN1207
付録 A: ソース コード
All of the software covered in this application note isavailable as a single WinZip archive file. The archivemay be downloaded from the Microchip corporate Website at:
www.microchip.com
Software License AgreementThe software supplied herewith by Microchip Technology Incorporated (the “Company”) is intended and supplied to you, the Company’s customer, for use solely and exclusively with products manufactured by the Company.The software is owned by the Company and/or its supplier, and is protected under applicable copyright laws. All rights are reserved. Any use in violation of the foregoing restrictions may subject the user to criminal sanctions under applicable laws, as well as to civil liability for the breach of the terms and conditions of this license.THIS SOFTWARE IS PROVIDED IN AN “AS IS” CONDITION. NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. THE COMPANY SHALL NOT, IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.
© 2009 Microchip Technology Inc. DS01207A_JP - ページ 105

AN1207
ノート :DS01207A_JP - ページ 106 © 2009 Microchip Technology Inc.

マイクロチップ社デバイスのコード保護機能に関する以下の点にご留意ください。
• マイクロチップ社製品は、その該当するマイクロチップ社データシートに記載の仕様を満たしています。
• マイクロチップ社では、通常の条件ならびに仕様どおりの方法で使用した場合、マイクロチップ社製品は現在市場に流通している同種製品としては もセキュリティの高い部類に入る製品であると考えております。
• コード保護機能を解除するための不正かつ違法な方法が存在します。マイクロチップ社の確認している範囲では、このような方法のいずれにおいても、マイクロチップ社製品をマイクロチップ社データシートの動作仕様外の方法で使用する必要があります。このような行為は、知的所有権の侵害に該当する可能性が非常に高いと言えます。
• マイクロチップ社は、コードの保全について懸念を抱いているお客様と連携し、対応策に取り組んでいきます。
• マイクロチップ社を含むすべての半導体メーカーの中で、自社のコードのセキュリティを完全に保証できる企業はありません。コード保護機能とは、マイクロチップ社が製品を「解読不能」として保証しているものではありません。
コード保護機能は常に進歩しています。マイクロチップ社では、製品のコード保護機能の改善に継続的に取り組んでいます。マイクロチップ社のコード保護機能を解除しようとする行為は、デジタルミレニアム著作権法に抵触する可能性があります。そのような行為によってソフトウェアまたはその他の著作物に不正なアクセスを受けた場合は、デジタルミレニアム著作権法の定めるところにより損害賠償訴訟を起こす権利があります。
本書に記載されているデバイス アプリケーションなどに関する情報は、ユーザーの便宜のためにのみ提供されているものであり、更新によって無効とされることがあります。アプリケーションと仕様の整合性を保証することは、お客様の責任において行ってください。マイクロチップ社は、明示的、暗黙的、書面、口頭、法定のいずれであるかを問わず、本書に記載されている情報に関して、状態、品質、性能、商品性、特定目的への適合性をはじめとする、いかなる類の表明も保証も行いません。マイクロチップ社は、本書の情報およびその使用に起因する一切の責任を否認します。マイクロチップ社デバイスを生命維持および /または保安のアプリケーションに使用することはデバイス購入者の全責任において行うものとし、デバイス購入者は、デバイスの使用に起因するすべての損害、請求、訴訟、および出費に関してマイクロチップ社を弁護、免責し、同社に不利益が及ばないようにすることに同意するものとします。暗黙的あるいは明示的を問わず、マイクロチップ社が知的財産権を保有しているライセンスは一切譲渡されません。
© 2009 Microchip Technology Inc.
商標
Microchip の社名とロゴ、Microchip ロゴ、Accuron、dsPIC、KEELOQ、KEELOQ ロゴ、MPLAB、PIC、PICmicro、PICSTART、rfPIC、SmartShunt、UNI/O は、米国およびその他の国における Microchip Technology Incorporated の登録商標です。
FilterLab、Linear Active Thermistor、MXDEV、MXLAB、SEEVAL、SmartSensor、The Embedded Control Solutions Company は、米国における Microchip Technology Incorporated の登録商標です。
Analog-for-the-Digital Age、Application Maestro、CodeGuard、dsPICDEM、dsPICDEM.net、dsPICworks、dsSPEAK、ECAN、ECONOMONITOR、FanSense、In-Circuit Serial Programming、ICSP、ICEPIC、Mindi、MiWi、MPASM、MPLAB Certified ロゴ、MPLIB、MPLINK、mTouch、nanoWatt XLP、PICkit、PICDEM、PICDEM.net、PICtail、PIC32 logo、PowerCal、PowerInfo、PowerMate、PowerTool、Real ICE、rfLAB、Select Mode、Total Endurance、 TSHARC、WiperLock、ZENA は、米国およびその他の国における Microchip Technology Incorporated の商標です。
SQTP は米国における Microchip Technology Incorporatedのサービスマークです。
その他、本書に記載されている商標は、各社に帰属します。
© 2009, Microchip Technology Incorporated, Printed in the U.S.A., All Rights Reserved.
再生紙を使用しています。
DS01207A_JP - ページ 107
マイクロチップ社では、Chandler および Tempe ( アリゾナ州 )、Gresham ( オレゴン州 ) の本部、設計部およびウエハ製造工場そしてカリフォルニア州とインドのデザイン センターが ISO/TS-16949:2002認証を取得しています。マイクロチップ社の品質システム プロセスおよび手順は、PIC® MCU および dsPIC® DSC、KEELOQ® コード ホッピング デバイス、シリアル EEPROM、マイクロペリフェラル、不揮発性メモリ、アナログ製品に採用されています。また、マイクロチップ社の開発システムの設計および製造に関する品質システムは、ISO 9001:2000 の認証を受けています。

DS01207A_JP - ページ 108 © 2009 Microchip Technology Inc.
北米本社2355 West Chandler Blvd.Chandler, AZ 85224-6199Tel: 480-792-7200 Fax: 480-792-7277テクニカル サポート : http://support.microchip.comウェブ アドレス : www.microchip.comアトランタDuluth, GA Tel: 678-957-9614 Fax: 678-957-1455ボストンWestborough, MATel: 774-760-0087 Fax: 774-760-0088シカゴItasca, ILTel: 630-285-0071 Fax: 630-285-0075クリーブランドIndependence, OHTel: 216-447-0464Fax: 216-447-0643ダラスAddison, TXTel: 972-818-7423 Fax: 972-818-2924デトロイトFarmington Hills, MITel: 248-538-2250Fax: 248-538-2260ココモKokomo, INTel: 765-864-8360Fax: 765-864-8387ロサンゼルスMission Viejo, CATel: 949-462-9523 Fax: 949-462-9608サンタクララSanta Clara, CATel: 408-961-6444Fax: 408-961-6445トロントMississauga, Ontario,CanadaTel: 905-673-0699 Fax: 905-673-6509
アジア / 太平洋アジア太平洋支社Suites 3707-14, 37th FloorTower 6, The GatewayHarbour City, KowloonHong KongTel: 852-2401-1200Fax: 852-2401-3431オーストラリア - シドニー
Tel: 61-2-9868-6733Fax: 61-2-9868-6755中国 - 北京
Tel: 86-10-8528-2100 Fax: 86-10-8528-2104中国 - 成都
Tel: 86-28-8665-5511Fax: 86-28-8665-7889中国 - 香港 SARTel: 852-2401-1200 Fax: 852-2401-3431中国 - 南京
Tel: 86-25-8473-2460Fax: 86-25-8473-2470中国 - 青島
Tel: 86-532-8502-7355Fax: 86-532-8502-7205中国 - 上海
Tel: 86-21-5407-5533 Fax: 86-21-5407-5066中国 - 瀋陽
Tel: 86-24-2334-2829Fax: 86-24-2334-2393中国 - 深川
Tel: 86-755-8203-2660 Fax: 86-755-8203-1760中国 - 武漢
Tel: 86-27-5980-5300Fax: 86-27-5980-5118中国 - 厦門
Tel: 86-592-2388138 Fax: 86-592-2388130中国 - 西安
Tel: 86-29-8833-7252Fax: 86-29-8833-7256中国 - 珠海
Tel: 86-756-3210040 Fax: 86-756-3210049
アジア / 太平洋インド - バンガロール
Tel: 91-80-3090-4444 Fax: 91-80-3090-4080インド - ニューデリー
Tel: 91-11-4160-8631Fax: 91-11-4160-8632インド - プネ
Tel: 91-20-2566-1512Fax: 91-20-2566-1513日本 - 横浜
Tel: 81-45-471- 6166 Fax: 81-45-471-6122韓国 - 大邱
Tel: 82-53-744-4301Fax: 82-53-744-4302韓国 - ソウル
Tel: 82-2-554-7200Fax: 82-2-558-5932 または82-2-558-5934マレーシア - クアラルンプール
Tel: 60-3-6201-9857Fax: 60-3-6201-9859マレーシア - ペナン
Tel: 60-4-227-8870Fax: 60-4-227-4068フィリピン - マニラ
Tel: 63-2-634-9065Fax: 63-2-634-9069シンガポールTel: 65-6334-8870Fax: 65-6334-8850台湾 - 新竹
Tel: 886-3-572-9526Fax: 886-3-572-6459台湾 - 高雄
Tel: 886-7-536-4818Fax: 886-7-536-4803台湾 - 台北
Tel: 886-2-2500-6610 Fax: 886-2-2508-0102タイ - バンコク
Tel: 66-2-694-1351Fax: 66-2-694-1350
ヨーロッパオーストリア - ヴェルス
Tel: 43-7242-2244-39Fax: 43-7242-2244-393デンマーク - コペンハーゲン
Tel: 45-4450-2828 Fax: 45-4485-2829フランス - パリ
Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79ドイツ - ミュンヘン
Tel: 49-89-627-144-0 Fax: 49-89-627-144-44イタリア - ミラノ Tel: 39-0331-742611 Fax: 39-0331-466781オランダ - ドリューネン
Tel: 31-416-690399 Fax: 31-416-690340スペイン - マドリッド
Tel: 34-91-708-08-90Fax: 34-91-708-08-91英国 - ウォーキンガム
Tel: 44-118-921-5869Fax: 44-118-921-5820
世界各国での販売およびサービス
02/04/09